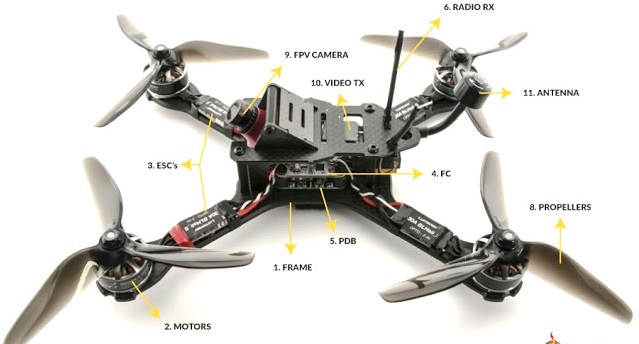
A quad-copter drone consists of the following essential hardware component
- Frame
- Motors
- ESC (electronic speed controller)
- Propeller
- Battery
- Flight Controller
- RC Receiver
To Fly FPV (first person view), you will also need the following component
- FPV Camera
- Video Transmitter / VTX
- 5.8gHz antenna
Frame
The frame of a quadcopter is the main structure, or the skeleton upon which the rest of components will be attached. Once you have decided on what you want your craft to do (Aerial Photography, Racing, Micro Freestyle etc.), you need to decide what size best suits your requirements. The size of the frame will determine what size props you will use (or vice versa), in turn the size of the props will determine the size of the motors, which will specify the current rating of your ESC’s.
PDB
PDB stands for Power Distribution Board and it is often where the battery power lead (ie. XT60) is connected. As its name suggests, the PDB distributes power to the components at the voltages they require. These days the necessity of using a PDB is being negated by FC’s, ESC’s and other (dubbed AIO or All-In-One) components providing the same function. These components have a wide input voltage range and can be connected to battery voltage (aka VBAT), they can then output a stable voltage ie. 5v to power an FPV camera or other components.
Flight Controller
The Flight Controller (aka “FC”) is the brain of a quadcopter, it has sensors on the board so it can understand how the craft is moving. Using the data provided by these sensors, the FC uses algorithms to calculate how fast each motor should be spinning for the craft to behave as the pilot is instructing via stick inputs on the TX (Radio Transmitter). Most of the wiring on your quad will be focussed around the FC. It needs to have the RX (receiver) connected, so it can be told what the pilot wants the craft to do. Each of the ESC signal and ground wires need to be connected for the FC commands to be carried out by the motors. With the introduction of BetaFlight OSD (On Screen Display), even the video feed from the FPV camera goes via the FC to the VTX (Video Transmitter).
RX (Radio Receiver)
Transmitters (TX) and receivers (RX) are not universal and you need to buy an RX that is compatible with your TX, an FrSky Taranis transmitter cannot work with a FlySky receiver. These days it is most likely that you will be using either PPM or a digital Serial protocol, which will only require 1 signal wire for all of the channels, plus power (3.3v or 5v) and GND.The signal wire will be connected to one of the UART terminals on your FC (Flight Controller). Some FC’s actually have integrated receivers, if you are taking this route make sure that it is using a compatible protocol.
ESC – Electronic Speed Controller
An ESC is a device that interprets signals from the flight controller, and translates those signals into phased electrical pulses to determine the speed of a brushless motor. Make sure that both your FC and ESC’s are capable of running the same ESC protocol ie. DShot 600. When selecting an ESC, remember that the current rating must be higher than the amperage drawn by your combination of motors and props.
These days an ESC has 4 input terminals, 2 are for signals coming from the FC. Signal and signal ground are wired to the FC, the 2 heavier wires are for Positive and Negative, they carry the high current to the ESC to supply the motor. These Positive and negative are wired to the PDB. An ESC has 3 output terminals, one for each of the wires of a brushless motor.
Motors
The motors are the main drain of battery power on your quad, therefore getting an efficient combination of propeller and motor is very important. Motor speed is rated in kV, generally a lower kV motor will produce more torque and a higher kV will spin faster, this however is without the prop attached.
There are many aspects to motor performance aside from raw thrust, high among these is how much current the motor draws from the battery. Remember to check the specs of your motors for their maximum amp draw, and ensure that your ESC’s are rated to withstand this amperage.
Propellers
There are possibly thousands of different types of propeller for quadcopters, with multiple options in almost every size. A heavier propeller will require more torque from the motor than a lighter prop, also blades with a higher AOA (Angle Of Attack – aka “aggressive props”) encounter more resistance from the air and require more torque. When a motor has to work hard to turn, it draws more Amps. Finding a balance between the thrust produced and the amperage used by the prop and motor combination is a balancing act that every quad pilot goes through, there is no “right answer”.
Battery
LiPo batteries are the power sources of the quadcopters. LiPo is used because of the high energy density and high discharge rate. LiPo batteries are rated by their nominal voltage (3.7v per cell), cell count in series, (shown as a number followed by ‘S’) ie 4S = 14.8v, capacity in mAh (ie.1300mAh) and discharge rate or ‘C’ rating (ie. 75C).
FPV Camera
An FPV camera allows the pilot to see the view from onboard the craft. On an FPV mini quad, there are normally 2 cameras, one for real time video streaming, and the other for recording HD footage.
FPV cameras don’t have great video quality – they are designed for WDR (Wide Dynamic Range) and low latency, which is extremely important to FPV. WDR refers to a camera’s ability to display changes in lighting conditions, and areas of shadow and light in the same image. Latency is the amount of time between your FPV camera capturing the image, and display that image on your screen or in your goggles.
The FPV camera will connect to the VTX (Video Transmitter), often via the FC which then overlay’s OSD (On-Screen Display) information on the image. A camera usually requires 5v to operate but some are capable of wide input voltage and can be connected to VBAT.
Video Transmitter
Video transmitter, or VTX, connects to the FPV camera to transmit video to the FPV goggles or monitor. Most quadcopters these days use the 5.8GHz for video transmission. You may find that your VTX can offer other functions such as a regulated 5v output that can be used to power your FPV camera. Remember that if you power your VTX without an antenna connected, it may burn out!
The VTX will receive a signal from the FPV camera (often via the FC) which it then broadcasts on one of a number of channels incorperated by the 5.8gHz frequency bracket. Some VTX run on 5v some require more. Be aware that if your VTX does run on 5v that it will be active when you connect your FC to USB, so you should have an antenna connected when configuring BetaFlight. Remember that if your VTX requires more than 5v it will not function with USB power and you will need to connect a battery to set up your channel, band and output power.
FPV Antenna
Every VTX requires an Antenna to transmit signal. Antennas come in various shapes and sizes, directional, linear and polarized.
Optional non mandatory Components
The most common additional components added to a mini quad are LED’s and a lost model buzzer. These are really important for a beginner, especially if you don’t have a nice flat area of mown grass, your quad can go really quickly which means it can be far away quite fast.
Especially if you are a beginner and are disoriented flying FPV, without something to draw your attention, your quad could be gone forever! Of course the Go-Pro or similar action camera is is a common feature.
16,087 Comments