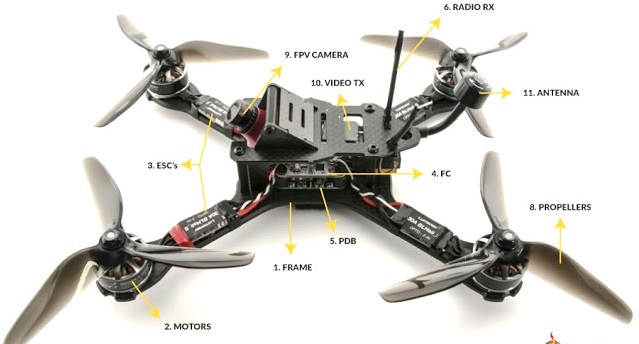
A quad-copter drone consists of the following essential hardware component
- Frame
- Motors
- ESC (electronic speed controller)
- Propeller
- Battery
- Flight Controller
- RC Receiver
To Fly FPV (first person view), you will also need the following component
- FPV Camera
- Video Transmitter / VTX
- 5.8gHz antenna
Frame
The frame of a quadcopter is the main structure, or the skeleton upon which the rest of components will be attached. Once you have decided on what you want your craft to do (Aerial Photography, Racing, Micro Freestyle etc.), you need to decide what size best suits your requirements. The size of the frame will determine what size props you will use (or vice versa), in turn the size of the props will determine the size of the motors, which will specify the current rating of your ESC’s.
PDB
PDB stands for Power Distribution Board and it is often where the battery power lead (ie. XT60) is connected. As its name suggests, the PDB distributes power to the components at the voltages they require. These days the necessity of using a PDB is being negated by FC’s, ESC’s and other (dubbed AIO or All-In-One) components providing the same function. These components have a wide input voltage range and can be connected to battery voltage (aka VBAT), they can then output a stable voltage ie. 5v to power an FPV camera or other components.
Flight Controller
The Flight Controller (aka “FC”) is the brain of a quadcopter, it has sensors on the board so it can understand how the craft is moving. Using the data provided by these sensors, the FC uses algorithms to calculate how fast each motor should be spinning for the craft to behave as the pilot is instructing via stick inputs on the TX (Radio Transmitter). Most of the wiring on your quad will be focussed around the FC. It needs to have the RX (receiver) connected, so it can be told what the pilot wants the craft to do. Each of the ESC signal and ground wires need to be connected for the FC commands to be carried out by the motors. With the introduction of BetaFlight OSD (On Screen Display), even the video feed from the FPV camera goes via the FC to the VTX (Video Transmitter).
RX (Radio Receiver)
Transmitters (TX) and receivers (RX) are not universal and you need to buy an RX that is compatible with your TX, an FrSky Taranis transmitter cannot work with a FlySky receiver. These days it is most likely that you will be using either PPM or a digital Serial protocol, which will only require 1 signal wire for all of the channels, plus power (3.3v or 5v) and GND.The signal wire will be connected to one of the UART terminals on your FC (Flight Controller). Some FC’s actually have integrated receivers, if you are taking this route make sure that it is using a compatible protocol.
ESC – Electronic Speed Controller
An ESC is a device that interprets signals from the flight controller, and translates those signals into phased electrical pulses to determine the speed of a brushless motor. Make sure that both your FC and ESC’s are capable of running the same ESC protocol ie. DShot 600. When selecting an ESC, remember that the current rating must be higher than the amperage drawn by your combination of motors and props.
These days an ESC has 4 input terminals, 2 are for signals coming from the FC. Signal and signal ground are wired to the FC, the 2 heavier wires are for Positive and Negative, they carry the high current to the ESC to supply the motor. These Positive and negative are wired to the PDB. An ESC has 3 output terminals, one for each of the wires of a brushless motor.
Motors
The motors are the main drain of battery power on your quad, therefore getting an efficient combination of propeller and motor is very important. Motor speed is rated in kV, generally a lower kV motor will produce more torque and a higher kV will spin faster, this however is without the prop attached.
There are many aspects to motor performance aside from raw thrust, high among these is how much current the motor draws from the battery. Remember to check the specs of your motors for their maximum amp draw, and ensure that your ESC’s are rated to withstand this amperage.
Propellers
There are possibly thousands of different types of propeller for quadcopters, with multiple options in almost every size. A heavier propeller will require more torque from the motor than a lighter prop, also blades with a higher AOA (Angle Of Attack – aka “aggressive props”) encounter more resistance from the air and require more torque. When a motor has to work hard to turn, it draws more Amps. Finding a balance between the thrust produced and the amperage used by the prop and motor combination is a balancing act that every quad pilot goes through, there is no “right answer”.
Battery
LiPo batteries are the power sources of the quadcopters. LiPo is used because of the high energy density and high discharge rate. LiPo batteries are rated by their nominal voltage (3.7v per cell), cell count in series, (shown as a number followed by ‘S’) ie 4S = 14.8v, capacity in mAh (ie.1300mAh) and discharge rate or ‘C’ rating (ie. 75C).
FPV Camera
An FPV camera allows the pilot to see the view from onboard the craft. On an FPV mini quad, there are normally 2 cameras, one for real time video streaming, and the other for recording HD footage.
FPV cameras don’t have great video quality – they are designed for WDR (Wide Dynamic Range) and low latency, which is extremely important to FPV. WDR refers to a camera’s ability to display changes in lighting conditions, and areas of shadow and light in the same image. Latency is the amount of time between your FPV camera capturing the image, and display that image on your screen or in your goggles.
The FPV camera will connect to the VTX (Video Transmitter), often via the FC which then overlay’s OSD (On-Screen Display) information on the image. A camera usually requires 5v to operate but some are capable of wide input voltage and can be connected to VBAT.
Video Transmitter
Video transmitter, or VTX, connects to the FPV camera to transmit video to the FPV goggles or monitor. Most quadcopters these days use the 5.8GHz for video transmission. You may find that your VTX can offer other functions such as a regulated 5v output that can be used to power your FPV camera. Remember that if you power your VTX without an antenna connected, it may burn out!
The VTX will receive a signal from the FPV camera (often via the FC) which it then broadcasts on one of a number of channels incorperated by the 5.8gHz frequency bracket. Some VTX run on 5v some require more. Be aware that if your VTX does run on 5v that it will be active when you connect your FC to USB, so you should have an antenna connected when configuring BetaFlight. Remember that if your VTX requires more than 5v it will not function with USB power and you will need to connect a battery to set up your channel, band and output power.
FPV Antenna
Every VTX requires an Antenna to transmit signal. Antennas come in various shapes and sizes, directional, linear and polarized.
Optional non mandatory Components
The most common additional components added to a mini quad are LED’s and a lost model buzzer. These are really important for a beginner, especially if you don’t have a nice flat area of mown grass, your quad can go really quickly which means it can be far away quite fast.
Especially if you are a beginner and are disoriented flying FPV, without something to draw your attention, your quad could be gone forever! Of course the Go-Pro or similar action camera is is a common feature.

16,036 Comments
Hairstyles Men · January 7, 2022 at 1:39 am
excellent issues altogether, you just received a emblem new reader. What would you suggest about your publish that you simply made a few days in the past? Any sure?
lebron 18 · March 16, 2022 at 9:39 pm
It抯 exhausting to search out educated folks on this subject, however you sound like you already know what you抮e talking about! Thanks
hermes birkin · March 16, 2022 at 9:40 pm
There is noticeably a bundle to know about this. I assume you made certain good factors in options also.
cheap jordans · March 16, 2022 at 9:40 pm
It抯 onerous to find educated folks on this subject, however you sound like you know what you抮e talking about! Thanks
kyrie irving · March 16, 2022 at 9:40 pm
I抦 impressed, I have to say. Really not often do I encounter a blog that抯 both educative and entertaining, and let me inform you, you could have hit the nail on the head. Your idea is excellent; the difficulty is one thing that not sufficient people are speaking intelligently about. I’m very happy that I stumbled across this in my search for one thing referring to this.
off white x jordan 1 · March 17, 2022 at 9:06 am
I am often to running a blog and i actually appreciate your content. The article has actually peaks my interest. I’m going to bookmark your site and hold checking for brand spanking new information.
curry shoes · March 17, 2022 at 9:07 am
Youre so cool! I dont suppose Ive read something like this before. So nice to search out someone with some unique ideas on this subject. realy thank you for starting this up. this web site is one thing that is wanted on the web, someone with slightly originality. useful job for bringing something new to the internet!
yeezy supply · March 17, 2022 at 9:07 am
Oh my goodness! an amazing article dude. Thanks Nonetheless I’m experiencing difficulty with ur rss . Don抰 know why Unable to subscribe to it. Is there anyone getting similar rss drawback? Anyone who is aware of kindly respond. Thnkx
supreme hoodie · March 17, 2022 at 9:08 am
After study a couple of of the blog posts in your website now, and I really like your method of blogging. I bookmarked it to my bookmark web site listing and will be checking back soon. Pls try my web page as nicely and let me know what you think.
stephen curry shoes · March 17, 2022 at 9:08 am
I抎 must check with you here. Which isn’t something I often do! I enjoy studying a submit that can make folks think. Additionally, thanks for allowing me to remark!
golden goose outlet · March 17, 2022 at 9:09 pm
Aw, this was a really nice post. In idea I would like to put in writing like this moreover ?taking time and precise effort to make an excellent article?but what can I say?I procrastinate alot and not at all seem to get one thing done.
jordan shoes · March 17, 2022 at 9:11 pm
An attention-grabbing discussion is value comment. I think that it’s best to write more on this topic, it may not be a taboo subject however typically persons are not enough to speak on such topics. To the next. Cheers
moncler jackets · March 18, 2022 at 7:32 am
I’m usually to blogging and i really recognize your content. The article has actually peaks my interest. I am going to bookmark your website and preserve checking for brand spanking new information.
lebron shoes · March 18, 2022 at 7:34 am
It抯 onerous to seek out knowledgeable folks on this topic, however you sound like you realize what you抮e speaking about! Thanks
kyrie 5 spongebob · March 18, 2022 at 7:39 am
You need to participate in a contest for among the finest blogs on the web. I’ll recommend this site!
jordan shoes · March 18, 2022 at 7:45 am
you will have an amazing blog right here! would you prefer to make some invite posts on my weblog?
hermes birkin · March 18, 2022 at 7:45 am
I am often to blogging and i really appreciate your content. The article has actually peaks my interest. I’m going to bookmark your website and keep checking for brand new information.
kd 12 · March 18, 2022 at 9:14 pm
It抯 exhausting to find educated people on this topic, but you sound like you realize what you抮e speaking about! Thanks
golden goose sneakers · March 18, 2022 at 9:16 pm
Oh my goodness! an incredible article dude. Thank you Nevertheless I am experiencing subject with ur rss . Don抰 know why Unable to subscribe to it. Is there anybody getting an identical rss downside? Anyone who is aware of kindly respond. Thnkx
off white clothing · March 18, 2022 at 9:16 pm
Oh my goodness! an amazing article dude. Thank you Nonetheless I am experiencing problem with ur rss . Don抰 know why Unable to subscribe to it. Is there anyone getting equivalent rss problem? Anybody who knows kindly respond. Thnkx
longchamp · March 18, 2022 at 9:21 pm
An attention-grabbing dialogue is worth comment. I believe that it’s best to write extra on this matter, it may not be a taboo subject but generally individuals are not sufficient to speak on such topics. To the next. Cheers
kd 13 · March 19, 2022 at 8:12 am
Youre so cool! I dont suppose Ive learn anything like this before. So good to seek out any person with some unique thoughts on this subject. realy thank you for starting this up. this web site is something that is needed on the net, someone with a little originality. helpful job for bringing one thing new to the web!
authentic jordans · March 19, 2022 at 8:13 am
very nice post, i actually love this web site, carry on it
kyrie 7 · March 19, 2022 at 8:18 am
I discovered your blog website on google and check a number of of your early posts. Continue to maintain up the superb operate. I simply extra up your RSS feed to my MSN Information Reader. Looking for ahead to reading more from you in a while!?
off white outlet · March 19, 2022 at 8:18 am
This actually answered my downside, thanks!
kawhi leonard shoes · March 20, 2022 at 9:48 pm
An attention-grabbing discussion is value comment. I feel that it’s best to write extra on this subject, it might not be a taboo subject however typically individuals are not sufficient to talk on such topics. To the next. Cheers
nike kyrie 5 · March 20, 2022 at 9:50 pm
After study a few of the weblog posts on your website now, and I truly like your means of blogging. I bookmarked it to my bookmark website listing and can be checking again soon. Pls try my site as effectively and let me know what you think.
golden goose · March 20, 2022 at 9:50 pm
This web site is known as a stroll-via for the entire information you wished about this and didn抰 know who to ask. Glimpse right here, and you抣l undoubtedly discover it.
off white nike · March 20, 2022 at 9:50 pm
I抦 impressed, I have to say. Really hardly ever do I encounter a blog that抯 each educative and entertaining, and let me let you know, you could have hit the nail on the head. Your idea is excellent; the problem is something that not sufficient individuals are speaking intelligently about. I am very comfortable that I stumbled across this in my seek for something regarding this.
supreme · March 20, 2022 at 9:51 pm
This really answered my drawback, thanks!
curry shoes · March 21, 2022 at 9:26 am
Can I just say what a aid to seek out somebody who truly is aware of what theyre speaking about on the internet. You definitely know how to carry a problem to mild and make it important. More people must read this and understand this facet of the story. I cant consider youre not more widespread because you positively have the gift.
yeezy · March 21, 2022 at 9:32 am
The subsequent time I learn a blog, I hope that it doesnt disappoint me as a lot as this one. I imply, I do know it was my choice to learn, but I actually thought youd have something attention-grabbing to say. All I hear is a bunch of whining about one thing that you could possibly repair in case you werent too busy in search of attention.
lebron james shoes · March 21, 2022 at 9:37 am
Nice post. I study one thing tougher on completely different blogs everyday. It is going to at all times be stimulating to learn content material from other writers and observe a bit of one thing from their store. I抎 prefer to make use of some with the content material on my blog whether or not you don抰 mind. Natually I抣l give you a hyperlink in your web blog. Thanks for sharing.
jordan 13 · March 21, 2022 at 9:38 am
There may be noticeably a bundle to find out about this. I assume you made certain nice points in options also.
supreme clothing · March 21, 2022 at 9:53 pm
It抯 onerous to find educated folks on this topic, however you sound like you understand what you抮e talking about! Thanks
yeezy 700 · March 21, 2022 at 9:55 pm
WONDERFUL Post.thanks for share..extra wait .. ?
bape hoodie · March 21, 2022 at 9:55 pm
Would you be fascinated about exchanging links?
hermes belts · March 22, 2022 at 9:33 am
An attention-grabbing discussion is price comment. I feel that you should write more on this topic, it might not be a taboo subject but generally individuals are not sufficient to talk on such topics. To the next. Cheers
bape · March 22, 2022 at 9:35 am
Oh my goodness! a tremendous article dude. Thanks Nevertheless I’m experiencing issue with ur rss . Don抰 know why Unable to subscribe to it. Is there anyone getting identical rss downside? Anybody who is aware of kindly respond. Thnkx
supreme clothing · March 22, 2022 at 9:36 am
Would you be thinking about exchanging links?
off white jordan 1 · March 22, 2022 at 9:41 am
Nice post. I be taught something tougher on totally different blogs everyday. It can all the time be stimulating to read content from different writers and follow a little something from their store. I抎 desire to use some with the content on my blog whether or not you don抰 mind. Natually I抣l offer you a link in your net blog. Thanks for sharing.
kyrie shoes · March 22, 2022 at 10:30 pm
WONDERFUL Post.thanks for share..more wait .. ?
jordan shoes · March 22, 2022 at 10:30 pm
You made some respectable points there. I seemed on the web for the problem and located most individuals will go together with with your website.
jordan shoes · March 22, 2022 at 10:31 pm
Aw, this was a very nice post. In thought I want to put in writing like this moreover ?taking time and actual effort to make an excellent article?however what can I say?I procrastinate alot and certainly not appear to get one thing done.
giannis shoes · March 23, 2022 at 9:36 am
It抯 arduous to seek out educated folks on this matter, however you sound like you realize what you抮e speaking about! Thanks
hermes birkin · March 23, 2022 at 9:38 am
This actually answered my drawback, thanks!
supreme clothing · March 23, 2022 at 9:38 am
This web page is mostly a walk-by way of for the entire information you wanted about this and didn抰 know who to ask. Glimpse right here, and also you抣l definitely uncover it.
golden goose · March 23, 2022 at 9:39 am
Aw, this was a really nice post. In concept I want to put in writing like this additionally ?taking time and actual effort to make a very good article?however what can I say?I procrastinate alot and certainly not appear to get something done.
golden goose · March 23, 2022 at 10:04 pm
After I originally commented I clicked the -Notify me when new comments are added- checkbox and now each time a comment is added I get four emails with the identical comment. Is there any method you’ll be able to remove me from that service? Thanks!
off white outlet · March 24, 2022 at 9:46 am
This actually answered my downside, thank you!
jordan 12 · March 24, 2022 at 9:47 am
I discovered your weblog site on google and examine just a few of your early posts. Proceed to keep up the excellent operate. I simply additional up your RSS feed to my MSN News Reader. Searching for ahead to studying more from you in a while!?
bape · March 24, 2022 at 9:55 am
After I originally commented I clicked the -Notify me when new comments are added- checkbox and now every time a comment is added I get 4 emails with the same comment. Is there any way you may take away me from that service? Thanks!
kevin durant shoes · March 24, 2022 at 10:31 pm
I am typically to blogging and i actually respect your content. The article has actually peaks my interest. I am going to bookmark your site and preserve checking for new information.
jordan shoes · March 24, 2022 at 10:33 pm
you’ve gotten a fantastic weblog right here! would you like to make some invite posts on my blog?
paul george shoes · March 25, 2022 at 10:33 am
It is best to participate in a contest for among the best blogs on the web. I’ll suggest this website!
yeezy shoes · March 25, 2022 at 10:35 am
Good post. I learn one thing tougher on totally different blogs everyday. It’s going to all the time be stimulating to learn content material from different writers and observe a bit of one thing from their store. I抎 want to make use of some with the content on my blog whether or not you don抰 mind. Natually I抣l provide you with a link in your internet blog. Thanks for sharing.
yeezys · March 25, 2022 at 10:36 am
After research just a few of the weblog posts on your web site now, and I actually like your manner of blogging. I bookmarked it to my bookmark website listing and might be checking again soon. Pls try my website online as properly and let me know what you think.
nike off whtie · March 25, 2022 at 10:39 am
Would you be taken with exchanging hyperlinks?
golden goose sneakers · March 25, 2022 at 10:40 am
This actually answered my problem, thanks!
jordan 1 low · March 25, 2022 at 11:15 pm
The next time I read a weblog, I hope that it doesnt disappoint me as much as this one. I mean, I do know it was my option to read, however I truly thought youd have one thing fascinating to say. All I hear is a bunch of whining about one thing that you can fix should you werent too busy searching for attention.
air jordan · March 25, 2022 at 11:15 pm
That is the right weblog for anyone who desires to seek out out about this topic. You realize so much its almost onerous to argue with you (not that I actually would want匟aHa). You positively put a brand new spin on a subject thats been written about for years. Nice stuff, simply great!
kyrie irving shoes · March 26, 2022 at 10:45 pm
An interesting dialogue is worth comment. I think that it is best to write extra on this matter, it won’t be a taboo subject however typically people are not sufficient to speak on such topics. To the next. Cheers
kyrie irving shoes · March 26, 2022 at 10:47 pm
That is the appropriate blog for anybody who wants to search out out about this topic. You notice a lot its nearly hard to argue with you (not that I actually would want匟aHa). You positively put a brand new spin on a topic thats been written about for years. Nice stuff, simply great!
chrome hearts outlet · March 26, 2022 at 10:52 pm
WONDERFUL Post.thanks for share..more wait .. ?
moncler · March 27, 2022 at 9:45 am
I抦 impressed, I have to say. Actually not often do I encounter a weblog that抯 both educative and entertaining, and let me inform you, you might have hit the nail on the head. Your idea is outstanding; the problem is something that not sufficient persons are speaking intelligently about. I’m very pleased that I stumbled across this in my seek for something relating to this.
goyard handbags · March 27, 2022 at 9:46 am
Can I just say what a aid to find somebody who truly knows what theyre talking about on the internet. You definitely know the best way to deliver a problem to light and make it important. More people must learn this and understand this side of the story. I cant imagine youre not more popular because you positively have the gift.
kobe shoes · March 27, 2022 at 9:47 am
This really answered my downside, thank you!
yeezy 500 blush · March 27, 2022 at 10:06 pm
Once I originally commented I clicked the -Notify me when new feedback are added- checkbox and now every time a comment is added I get 4 emails with the identical comment. Is there any means you may take away me from that service? Thanks!
pg shoes · March 28, 2022 at 10:43 am
I抦 impressed, I have to say. Actually not often do I encounter a blog that抯 each educative and entertaining, and let me tell you, you have hit the nail on the head. Your concept is excellent; the issue is something that not enough people are talking intelligently about. I’m very completely happy that I stumbled across this in my seek for one thing relating to this.
jordans shoes · March 28, 2022 at 10:58 pm
I抎 need to test with you here. Which isn’t something I normally do! I get pleasure from reading a publish that can make individuals think. Additionally, thanks for permitting me to comment!
kobe · March 28, 2022 at 11:00 pm
After examine a couple of of the weblog posts in your website now, and I really like your approach of blogging. I bookmarked it to my bookmark website listing and will likely be checking back soon. Pls check out my web page as effectively and let me know what you think.
yeezy boost 350 · March 30, 2022 at 12:07 am
You must participate in a contest for probably the greatest blogs on the web. I’ll recommend this web site!
golden goose sneakers · March 30, 2022 at 12:08 am
Once I originally commented I clicked the -Notify me when new feedback are added- checkbox and now every time a comment is added I get 4 emails with the identical comment. Is there any means you can remove me from that service? Thanks!
curry 6 · March 31, 2022 at 12:43 am
very nice post, i certainly love this web site, keep on it
kobe 11 · March 31, 2022 at 3:55 pm
you have got an incredible weblog right here! would you wish to make some invite posts on my weblog?
adidas yeezy · April 1, 2022 at 2:59 am
Nice post. I learn something tougher on different blogs everyday. It is going to at all times be stimulating to learn content material from other writers and follow a bit something from their store. I抎 desire to use some with the content on my blog whether you don抰 mind. Natually I抣l offer you a link in your internet blog. Thanks for sharing.
supreme outlet · April 1, 2022 at 6:12 pm
There may be noticeably a bundle to know about this. I assume you made sure nice points in features also.
kd shoes · April 1, 2022 at 6:13 pm
Hey! I just would like to give a huge thumbs up for the good info you’ve gotten here on this post. I shall be coming again to your blog for extra soon.
lebron 17 · April 2, 2022 at 3:13 am
Youre so cool! I dont suppose Ive read anything like this before. So good to search out somebody with some authentic ideas on this subject. realy thanks for starting this up. this website is something that is needed on the net, somebody with a bit originality. helpful job for bringing one thing new to the web!
supreme · April 2, 2022 at 6:25 pm
Oh my goodness! an incredible article dude. Thanks However I am experiencing concern with ur rss . Don抰 know why Unable to subscribe to it. Is there anyone getting similar rss problem? Anyone who is aware of kindly respond. Thnkx
jordan 4 · April 3, 2022 at 7:51 pm
I used to be very pleased to search out this web-site.I wished to thanks in your time for this excellent read!! I positively enjoying each little little bit of it and I have you bookmarked to take a look at new stuff you blog post.
moncler jacket · April 4, 2022 at 6:50 am
When I initially commented I clicked the -Notify me when new feedback are added- checkbox and now every time a comment is added I get four emails with the same comment. Is there any means you possibly can take away me from that service? Thanks!
bape · April 4, 2022 at 9:12 pm
I found your weblog site on google and examine a number of of your early posts. Continue to keep up the excellent operate. I simply additional up your RSS feed to my MSN News Reader. Seeking ahead to reading more from you in a while!?
yeezy 700 · April 4, 2022 at 9:17 pm
There are some fascinating points in time on this article however I don抰 know if I see all of them center to heart. There is some validity but I will take hold opinion till I look into it further. Good article , thanks and we would like extra! Added to FeedBurner as nicely
lebron 16 · April 5, 2022 at 9:02 am
There are some attention-grabbing closing dates on this article but I don抰 know if I see all of them heart to heart. There may be some validity but I’ll take hold opinion until I look into it further. Good article , thanks and we wish more! Added to FeedBurner as properly
golden goose · April 5, 2022 at 9:03 am
Hiya! I just would like to give a huge thumbs up for the great information you might have here on this post. I will probably be coming back to your blog for extra soon.
goyard bags · April 12, 2022 at 7:03 pm
I needed to put you a little bit of remark to finally give thanks over again about the stunning things you have discussed on this site. It has been simply extremely generous with you in giving openly what a number of us would’ve advertised for an e-book in order to make some bucks for themselves, even more so considering the fact that you could possibly have tried it in the event you wanted. The basics also acted to provide a good way to realize that most people have the identical desire just like my very own to grasp a lot more with respect to this issue. I know there are thousands of more fun moments ahead for individuals who look over your site.
golden goose sneakers · April 12, 2022 at 7:03 pm
I wish to show my appreciation to this writer for bailing me out of this situation. After searching throughout the world-wide-web and meeting thoughts which are not productive, I was thinking my life was gone. Being alive minus the answers to the difficulties you’ve sorted out as a result of your good report is a crucial case, and the ones that would have negatively affected my entire career if I hadn’t come across your blog post. Your good know-how and kindness in playing with all things was tremendous. I am not sure what I would’ve done if I had not discovered such a subject like this. I can also at this time look ahead to my future. Thank you very much for this professional and result oriented guide. I won’t think twice to propose the sites to anybody who would need support about this topic.
yeezy 380 · April 15, 2022 at 11:43 pm
I precisely wished to appreciate you again. I am not sure what I could possibly have made to happen without the actual recommendations documented by you about such a situation. It has been a alarming problem for me personally, nevertheless discovering this specialized technique you handled it made me to weep for gladness. I am grateful for this guidance and in addition sincerely hope you are aware of an amazing job that you’re undertaking training the rest thru a blog. Most probably you have never encountered any of us.
alexander mcqueen outlet · April 17, 2022 at 1:32 am
I must express my affection for your generosity supporting men and women that require guidance on this one subject matter. Your special dedication to getting the message all around appears to be particularly interesting and have specifically permitted girls much like me to arrive at their endeavors. Your own insightful publication implies this much to me and even further to my office workers. Thanks a ton; from all of us.
golden goose outlet · April 17, 2022 at 1:38 am
I am only commenting to let you be aware of of the excellent encounter my friend’s girl found visiting the blog. She learned some things, with the inclusion of what it is like to have a great teaching character to make other folks without difficulty understand various problematic issues. You truly surpassed our expected results. Thanks for coming up with these essential, trusted, informative and as well as fun tips on that topic to Tanya.
jordan retro · April 17, 2022 at 1:38 am
Thanks for your entire labor on this blog. Kate loves setting aside time for internet research and it’s obvious why. All of us learn all of the lively tactic you give vital items on this web blog and as well as recommend participation from other individuals on the concept plus our child has always been being taught a great deal. Take advantage of the rest of the new year. You’re the one conducting a stunning job.
steph curry shoes · April 17, 2022 at 1:39 am
Thanks so much for providing individuals with such a nice chance to read articles and blog posts from this blog. It is usually very cool and also jam-packed with a great time for me personally and my office colleagues to search the blog a minimum of 3 times per week to find out the newest stuff you have. And lastly, I am actually motivated considering the unique guidelines you serve. Selected two tips on this page are really the most effective I have had.
off white · April 17, 2022 at 1:39 am
Thanks a lot for providing individuals with an extremely splendid chance to read in detail from this web site. It really is very sweet and as well , stuffed with a lot of fun for me personally and my office friends to visit the blog minimum thrice per week to see the new issues you will have. Not to mention, we’re always fascinated with the amazing opinions you give. Certain 3 areas in this post are without a doubt the most impressive I have had.
golden goose sneakers · April 17, 2022 at 1:39 am
I precisely needed to appreciate you again. I’m not certain the things I would have worked on in the absence of these pointers shown by you on that subject. It seemed to be the distressing case in my opinion, however , being able to see this expert style you dealt with that made me to cry over gladness. Now i am thankful for your assistance and then sincerely hope you are aware of a powerful job you happen to be getting into educating many others by way of your web page. I am sure you have never come across all of us.
golden goose · April 18, 2022 at 4:29 am
I am writing to make you understand what a wonderful experience my princess obtained using the blog. She even learned lots of pieces, most notably how it is like to possess a great teaching style to make many more effortlessly understand a number of tricky matters. You actually exceeded her expectations. Thanks for displaying such informative, safe, edifying and as well as fun tips on the topic to Julie.
supreme clothing · April 18, 2022 at 4:30 am
Thanks for your whole efforts on this site. My mom take interest in participating in investigations and it is easy to see why. Almost all learn all of the powerful means you deliver rewarding guidance via your web site and even recommend contribution from other individuals about this matter and my daughter is in fact understanding a whole lot. Take advantage of the remaining portion of the year. You’re the one performing a stunning job.
hermes · April 18, 2022 at 4:30 am
I wanted to draft you a little bit of note to help thank you very much as before for those nice suggestions you have shared here. It was quite unbelievably open-handed of you to offer extensively what many individuals would’ve distributed as an e-book to make some bucks for their own end, most notably considering that you might have tried it in case you wanted. Those guidelines also served like a great way to be certain that most people have a similar fervor much like my own to see a lot more on the subject of this problem. I believe there are several more pleasant sessions ahead for many who read carefully your blog.
kyrie 4 · April 18, 2022 at 4:31 am
I truly wanted to post a word so as to appreciate you for some of the fantastic facts you are placing on this site. My incredibly long internet search has now been recognized with reliable facts to share with my family and friends. I would tell you that we site visitors actually are truly lucky to live in a perfect network with very many outstanding people with useful advice. I feel really fortunate to have encountered your entire site and look forward to some more brilliant minutes reading here. Thanks once again for everything.
curry 7 · April 18, 2022 at 4:31 am
A lot of thanks for your own effort on this web site. My mum loves doing investigation and it is simple to grasp why. Most of us notice all regarding the lively form you give powerful information via the blog and even increase contribution from other people on the concept while my child is in fact becoming educated a great deal. Take pleasure in the rest of the year. You have been conducting a fantastic job.
golden goose outlet · April 18, 2022 at 4:32 am
Needed to send you a little remark to help give thanks as before for your pleasant ideas you’ve shown on this website. It is simply pretty generous with people like you to present without restraint what a lot of people could have distributed for an electronic book to help with making some profit for their own end, most notably since you could have done it if you desired. Those inspiring ideas as well acted as a good way to comprehend the rest have the identical dreams just as my very own to grasp great deal more related to this issue. Certainly there are several more fun moments in the future for many who discover your website.
yeezy boost 350 · April 18, 2022 at 4:33 am
I just wanted to construct a small remark to be able to say thanks to you for all the superb tactics you are writing at this website. My prolonged internet search has at the end of the day been paid with awesome facts and techniques to share with my two friends. I would believe that we visitors are undoubtedly blessed to be in a fabulous place with so many lovely professionals with insightful tips. I feel very lucky to have discovered the web page and look forward to really more excellent moments reading here. Thanks a lot once again for all the details.
kyrie 6 shoes · April 19, 2022 at 7:57 am
I intended to send you a little bit of word to be able to say thanks a lot as before on your wonderful tricks you’ve shown above. This is generous with you to allow unhampered what a lot of people would’ve advertised for an e-book to generate some dough for their own end, even more so since you might well have tried it if you wanted. Those strategies additionally worked to be the fantastic way to realize that someone else have a similar zeal the same as my own to realize many more with respect to this matter. Certainly there are several more pleasant periods up front for many who check out your blog post.
supreme clothing · April 20, 2022 at 11:51 am
I am writing to make you be aware of what a fabulous encounter my princess experienced going through the blog. She even learned numerous details, not to mention how it is like to have a wonderful teaching mindset to make other folks really easily learn about selected tricky matters. You undoubtedly exceeded our own desires. Thanks for churning out those necessary, healthy, explanatory and fun tips on your topic to Evelyn.
nike sb dunks · April 20, 2022 at 11:52 am
Thank you a lot for providing individuals with an extremely pleasant opportunity to read in detail from this website. It is always very pleasant plus packed with fun for me personally and my office mates to visit the blog at the very least three times per week to read the newest issues you will have. And of course, I’m just usually contented with your outstanding ideas served by you. Some 3 areas in this post are honestly the most effective I have ever had.
kevin durant shoes · April 22, 2022 at 8:32 pm
I needed to compose you this tiny note in order to give thanks the moment again for those pretty tactics you have discussed here. It’s particularly generous with you to grant freely just what a lot of folks could have offered as an ebook in making some dough for themselves, principally given that you might have done it if you wanted. The solutions likewise worked to be the good way to understand that other people online have the identical interest really like my personal own to know whole lot more pertaining to this condition. I think there are millions of more fun instances ahead for individuals who find out your site.
supreme hoodie · April 22, 2022 at 8:33 pm
I would like to get across my admiration for your kindness supporting those individuals that need help with this particular study. Your special commitment to getting the solution all-around has been certainly insightful and has without exception enabled girls like me to realize their dreams. Your amazing helpful facts denotes so much a person like me and even further to my colleagues. With thanks; from each one of us.
yeezy boost 350 · April 24, 2022 at 1:29 am
Thanks a lot for giving everyone an extraordinarily superb possiblity to read from this web site. It’s usually so enjoyable plus packed with a lot of fun for me personally and my office mates to search your website more than thrice in 7 days to study the fresh issues you have. And of course, I am usually fascinated with all the terrific thoughts you serve. Some 1 tips in this article are basically the most beneficial I have ever had.
russell westbrook shoes · April 25, 2022 at 4:15 am
I simply needed to say thanks yet again. I do not know the things that I could possibly have handled without the type of ways revealed by you regarding this theme. Completely was a very challenging dilemma in my circumstances, nevertheless seeing a specialized way you resolved the issue made me to leap with happiness. I am just grateful for the advice and in addition trust you really know what a powerful job you are doing instructing most people through the use of a blog. I am certain you have never met any of us.
hermes · April 25, 2022 at 4:16 am
I am also writing to let you know of the fabulous experience my cousin’s child undergone visiting your web site. She even learned such a lot of pieces, not to mention how it is like to possess a wonderful teaching heart to get other folks effortlessly have an understanding of some hard to do matters. You undoubtedly did more than our own expectations. Thanks for presenting those practical, healthy, revealing and as well as unique thoughts on the topic to Sandra.
golden goose sneakers · April 25, 2022 at 4:16 am
I would like to voice my love for your kindness giving support to persons who require assistance with in this content. Your special commitment to getting the message all around appears to be particularly interesting and has surely made women like me to achieve their targets. Your own interesting instruction can mean this much a person like me and even more to my peers. With thanks; from all of us.
curry 8 · April 27, 2022 at 1:53 pm
I actually wanted to compose a small comment in order to thank you for these pleasant suggestions you are posting at this website. My time intensive internet investigation has now been honored with sensible points to exchange with my contacts. I would express that most of us readers actually are quite lucky to exist in a useful site with many awesome people with very beneficial opinions. I feel very much privileged to have seen the web page and look forward to tons of more enjoyable minutes reading here. Thanks a lot again for everything.
kd shoes · April 28, 2022 at 8:53 pm
I must show my admiration for your generosity supporting those people who actually need help with in this idea. Your very own commitment to getting the message around had become quite invaluable and has always enabled workers like me to arrive at their desired goals. Your entire warm and helpful hints and tips means this much a person like me and especially to my peers. Best wishes; from each one of us.
chrome hearts outlet · April 30, 2022 at 1:37 am
I precisely wished to thank you so much yet again. I do not know what I would’ve sorted out in the absence of the actual hints shared by you about this topic. It was a very frightful difficulty in my opinion, however , noticing a new expert form you solved that forced me to weep over happiness. Extremely grateful for this advice and as well , sincerely hope you realize what a great job you are accomplishing training others through your website. Most probably you’ve never encountered all of us.
off white hoodie · April 30, 2022 at 1:38 am
I would like to voice my respect for your generosity for women who really need help on your field. Your very own commitment to passing the solution all over turned out to be quite productive and has constantly helped individuals just like me to get to their objectives. Your own insightful hints and tips means a whole lot to me and especially to my colleagues. Thanks a ton; from everyone of us.
chrome hearts · April 30, 2022 at 1:38 am
I and also my guys were actually studying the nice tips on your web page and so all of the sudden got a horrible suspicion I never thanked the web blog owner for those strategies. Most of the young boys are actually totally warmed to read through all of them and have pretty much been taking advantage of those things. Thanks for getting simply helpful and also for pick out these kinds of wonderful issues millions of individuals are really wanting to learn about. My very own honest apologies for not saying thanks to you sooner.
bape outlet · May 1, 2022 at 8:21 am
I am only commenting to make you know of the cool discovery my girl developed using your blog. She mastered a wide variety of pieces, including how it is like to have a very effective helping style to make certain people easily have an understanding of a variety of very confusing subject areas. You actually surpassed her expectations. Thank you for presenting those invaluable, safe, explanatory and as well as easy guidance on the topic to Emily.
rocket league car hitboxes · May 1, 2022 at 8:53 pm
Hi there, I enjoy reading through your post. I wanted to write
a little comment to support you.
jordan shoes · May 2, 2022 at 2:30 pm
I wanted to put you that very small observation just to say thanks a lot over again for your personal lovely thoughts you’ve featured on this website. It has been simply generous of people like you to supply publicly what exactly most of us could possibly have made available for an electronic book to help with making some profit on their own, chiefly given that you might have done it in the event you desired. The good ideas likewise worked to become a great way to understand that someone else have similar dream really like my personal own to learn a whole lot more on the topic of this matter. Certainly there are millions of more pleasurable sessions in the future for individuals who check out your blog post.
supreme outlet · May 3, 2022 at 7:56 pm
Thank you for every one of your hard work on this web site. My niece loves carrying out research and it is easy to see why. A number of us hear all regarding the dynamic means you give valuable tips on this website and in addition improve participation from the others on that concern while our own daughter has been being taught a great deal. Take pleasure in the remaining portion of the year. You have been carrying out a brilliant job.
curry 6 · May 4, 2022 at 1:36 pm
A lot of thanks for all your effort on this website. My mum enjoys doing research and it’s easy to see why. A number of us notice all of the powerful method you make advantageous tips by means of the web site and inspire response from some others about this theme and our own daughter is understanding a lot of things. Have fun with the rest of the year. Your conducting a terrific job.
lebron james shoes · May 4, 2022 at 1:37 pm
I want to get across my appreciation for your generosity supporting people who really want help with in this concern. Your special commitment to getting the solution along appears to be quite useful and has continually encouraged those much like me to arrive at their targets. The warm and helpful tutorial can mean much a person like me and even more to my peers. Regards; from all of us.
jordan retro · May 4, 2022 at 1:42 pm
I in addition to my buddies appeared to be examining the best tips and hints from the website then the sudden I got an awful feeling I never thanked the web site owner for those techniques. Most of the guys were glad to see all of them and have in effect surely been tapping into those things. We appreciate you being simply considerate and then for deciding on some helpful resources millions of individuals are really wanting to be informed on. Our sincere regret for not expressing appreciation to earlier.
bape clothing · May 5, 2022 at 3:21 am
I intended to put you this little bit of word to be able to thank you so much the moment again considering the spectacular things you have featured here. It’s quite seriously open-handed of people like you to supply without restraint all many people could possibly have advertised for an e book to get some profit for their own end, most notably now that you might well have tried it in the event you desired. These advice as well served like the great way to be aware that the rest have a similar fervor just like my own to realize a lot more in regard to this condition. Certainly there are thousands of more pleasant times ahead for folks who look into your website.
golden goose · May 5, 2022 at 7:42 pm
I must express thanks to this writer just for bailing me out of this particular challenge. As a result of surfing around through the internet and getting advice which are not powerful, I figured my entire life was over. Existing minus the answers to the difficulties you have solved through your entire posting is a crucial case, and the ones which could have badly affected my entire career if I had not encountered your web site. Your own personal mastery and kindness in maneuvering all areas was priceless. I am not sure what I would have done if I had not encountered such a subject like this. I can now look ahead to my future. Thanks so much for your expert and amazing help. I won’t hesitate to endorse your blog to anybody who requires tips about this subject matter.
yeezy boost 350 · May 6, 2022 at 8:11 am
My spouse and i got so lucky Peter managed to round up his studies out of the precious recommendations he received from your own web site. It is now and again perplexing to simply continually be giving freely methods which often others might have been making money from. And we see we have got the writer to thank for this. These explanations you have made, the straightforward blog navigation, the friendships you can make it possible to engender – it is many unbelievable, and it’s letting our son and us consider that this article is amusing, which is certainly unbelievably vital. Thanks for the whole thing!
curry 7 shoes · May 6, 2022 at 10:37 pm
I’m commenting to let you be aware of of the magnificent discovery my princess found checking your web page. She discovered such a lot of pieces, not to mention what it is like to possess a great teaching style to make many people completely know a variety of specialized subject areas. You really exceeded visitors’ expected results. Thank you for giving such good, healthy, explanatory and cool guidance on the topic to Sandra.
moncler outlet · May 8, 2022 at 2:47 am
I am only writing to make you know of the nice discovery my cousin’s daughter had viewing your web page. She mastered many things, including what it is like to have a great teaching spirit to let other folks without problems learn about a variety of very confusing topics. You actually did more than readers’ expected results. Many thanks for imparting those good, safe, revealing and as well as unique tips about this topic to Evelyn.
moncler · May 8, 2022 at 2:47 am
I precisely needed to say thanks yet again. I’m not certain the things that I would have used in the absence of the secrets documented by you concerning such situation. It actually was a real alarming setting for me personally, however , taking a look at your skilled manner you handled it made me to leap for fulfillment. I am just thankful for your advice and even have high hopes you really know what a powerful job you have been putting in training others by way of your site. More than likely you’ve never got to know all of us.
lebron 18 · May 8, 2022 at 7:48 pm
Thank you for all of your hard work on this website. Debby really likes managing investigations and it’s really simple to grasp why. Almost all learn all about the powerful way you offer precious tricks by means of the web site and even improve response from people about this matter plus my girl is without a doubt learning a great deal. Take advantage of the remaining portion of the year. You’re performing a wonderful job.
golden goose outlet · May 8, 2022 at 7:48 pm
I am just writing to make you know what a fantastic encounter my girl had going through your web site. She figured out a lot of pieces, which included what it’s like to have a marvelous teaching mindset to have other folks quite simply fully grasp specific complicated issues. You really exceeded her expectations. Thanks for delivering such important, trusted, informative and even fun guidance on your topic to Evelyn.
jordan shoes · May 11, 2022 at 1:52 am
I have to express thanks to this writer just for rescuing me from this challenge. Just after searching through the online world and getting thoughts that were not pleasant, I figured my life was over. Existing without the solutions to the difficulties you’ve resolved all through your entire review is a critical case, as well as the kind which could have badly affected my entire career if I hadn’t discovered your blog post. Your personal training and kindness in controlling all the things was excellent. I don’t know what I would’ve done if I had not come across such a solution like this. It’s possible to at this point relish my future. Thanks for your time so much for this specialized and sensible help. I won’t be reluctant to endorse your blog post to anyone who should get guidelines on this subject.
supreme outlet · May 12, 2022 at 3:52 am
I simply desired to say thanks yet again. I’m not certain the things I could possibly have gone through in the absence of the tactics discussed by you directly on that field. It seemed to be a very hard setting for me, nevertheless observing this well-written style you solved the issue forced me to weep with joy. I am just thankful for your support and as well , hope you know what a great job that you’re carrying out teaching many others via your websites. I am certain you haven’t come across all of us.
jordan retro · May 12, 2022 at 3:53 am
I’m just writing to let you be aware of what a fine discovery my cousin’s girl developed visiting your site. She picked up a lot of issues, which include what it’s like to have an excellent coaching style to let a number of people just learn a variety of complex things. You really surpassed our desires. Thanks for showing these important, healthy, revealing and as well as unique tips on your topic to Julie.
supreme clothing · May 12, 2022 at 3:53 am
I and my guys were found to be checking the good tips and hints found on your web site and then developed a horrible suspicion I never expressed respect to the web blog owner for those strategies. These guys appeared to be as a result warmed to see all of them and have seriously been taking advantage of them. Thanks for being considerably kind and also for going for this sort of fine themes most people are really desperate to be informed on. My very own sincere regret for not saying thanks to earlier.
off white hoodie · May 13, 2022 at 7:29 am
Thank you for all your effort on this web page. My niece takes pleasure in managing internet research and it is simple to grasp why. Most of us know all regarding the lively tactic you give very important steps via the website and as well improve response from other people on this situation so my princess is without question being taught a great deal. Enjoy the remaining portion of the new year. You are conducting a glorious job.
curry shoes · May 14, 2022 at 11:12 am
I truly wanted to develop a comment in order to express gratitude to you for the remarkable techniques you are giving out on this site. My considerable internet search has at the end been compensated with brilliant facts and strategies to share with my pals. I ‘d declare that most of us readers are unquestionably fortunate to exist in a remarkable website with very many wonderful professionals with interesting things. I feel very blessed to have encountered your entire website page and look forward to tons of more exciting moments reading here. Thanks again for a lot of things.
jordan shoes · May 14, 2022 at 11:13 am
My spouse and i have been so thrilled Jordan could carry out his web research through the entire precious recommendations he received from your very own weblog. It is now and again perplexing to just choose to be giving freely guidelines that a number of people have been making money from. We fully grasp we have the website owner to appreciate because of that. The most important illustrations you have made, the simple blog navigation, the relationships you will make it possible to create – it’s got mostly spectacular, and it’s really letting our son and us recognize that this content is excellent, and that’s particularly mandatory. Thank you for the whole lot!
yeezy · May 22, 2022 at 1:55 pm
Thank you a lot for giving everyone an extremely terrific possiblity to read articles and blog posts from this site. It can be so amazing and jam-packed with amusement for me personally and my office co-workers to search your web site no less than 3 times every week to study the new stuff you have got. And of course, I am at all times impressed with all the gorgeous concepts served by you. Certain 4 areas in this article are surely the most impressive I have had.
supreme · May 24, 2022 at 11:27 am
My husband and i have been quite thrilled that Raymond managed to carry out his analysis from your ideas he had out of the web pages. It is now and again perplexing to simply find yourself freely giving tactics which usually most people could have been trying to sell. Therefore we do know we now have the writer to be grateful to for that. The entire illustrations you have made, the simple blog navigation, the relationships your site give support to instill – it is all awesome, and it’s really letting our son and us understand that topic is satisfying, and that is highly serious. Many thanks for all!
AshCounk · May 28, 2022 at 1:03 am
[url=https://plavix.shop/]best price plavix 75 mg[/url]
WimCounk · May 28, 2022 at 6:13 am
[url=https://drugstore.guru/]mail order pharmacy[/url]
BooCounk · May 28, 2022 at 7:26 am
[url=https://accutane.digital/]accutane tablets buy online[/url]
MarkCounk · May 28, 2022 at 3:28 pm
[url=https://buyantibiotic.shop/]chloramphenicol tablet[/url]
https://poradnikfaceta.com · May 29, 2022 at 7:03 pm
https://poradnikfaceta.com
My developer is trying to convince me to move to
.net from PHP. I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using WordPress on a variety of websites for about
a year and am nervous about switching to another
platform. I have heard very good things about blogengine.net.
Is there a way I can transfer all my wordpress content
into it? Any help would be really appreciated!
WimCounk · May 30, 2022 at 6:54 am
[url=https://retina.cfd/]retin a prescription[/url]
BooCounk · May 30, 2022 at 10:04 am
[url=https://atrazodone.online/]trazodone 125 mg[/url] [url=https://clopidogrel.store/]plavix 150 mg[/url] [url=https://accutane.digital/]generic accutane canada[/url] [url=https://neurontin.cfd/]buy gabapentin canada[/url] [url=https://buysynthroid.shop/]where to buy synthroid online[/url]
PaulCounk · May 30, 2022 at 10:48 pm
[url=https://synthroid.cfd/]synthroid mcg[/url] [url=https://clopidogrel.store/]clopidogrel medicine[/url] [url=https://buydiflucan.shop/]diflucan 150[/url] [url=https://valacyclovir.shop/]valtrex pharmacy[/url] [url=https://augmentin.best/]buy augmentin online australia[/url]
AshCounk · May 30, 2022 at 11:00 pm
[url=https://trazodone.cfd/]desyrel 50[/url] [url=https://buymetformin.shop/]metformin without rx[/url] [url=https://ivermectin.creditcard/]ivermectin drug[/url] [url=https://ivermectin.properties/]ivermectin 4000 mcg[/url] [url=https://vardenafil.directory/]order levitra professional[/url] [url=https://acyclovir.shop/]buy zovirax canada[/url] [url=https://buydiflucan.shop/]buy diflucan 150 mg[/url] [url=https://fluconazole.shop/]buy diflucan canada[/url] [url=https://cleocin.store/]buy clindamycin pills online[/url] [url=https://vardenafil.works/]where to buy generic levitra[/url] [url=https://clopidogrel.store/]cheap clopidogrel[/url] [url=https://diflucan.works/]diflucan 100 mg price[/url] [url=https://effexor.store/]effexor prescription pills[/url] [url=https://buyantibiotic.shop/]buy roxithromycin online[/url] [url=https://drugstore.run/]rx online pharmacy[/url] [url=https://bactrim.store/]generic bactrim ds[/url] [url=https://buydiclofenac.shop/]diclofenac over the counter in europe[/url] [url=https://retina.cfd/]tretinoin 0.5 prescription cream[/url] [url=https://clonidine.digital/]where can i buy clonidine[/url] [url=https://albenza.store/]buy albenza online[/url]
IvyCounk · May 31, 2022 at 1:01 am
[url=http://accutane.digital/]accutane 5 mg[/url] [url=http://plavix.shop/]how much is plavix[/url] [url=http://cleocin.store/]clindamycin prescription cost[/url] [url=http://furosemide.cfd/]where can i get furosemide[/url] [url=http://medrol.online/]medrol 80 mg[/url] [url=http://buydiclofenac.shop/]voltaren 2.3 gel[/url] [url=http://buymetformin.shop/]can i buy metformin over the counter in canada[/url] [url=http://lexapro.cfd/]buy generic lexapro online[/url] [url=http://vardenafil.directory/]levitra australia[/url] [url=http://valacyclovir.shop/]how much is valtrex cost[/url] [url=http://buspar.shop/]buspar 60 mg daily[/url] [url=http://buysynthroid.shop/]cheapest synthroid prices[/url] [url=http://augmentin.best/]clarithromycin amoxicillin[/url] [url=http://diflucan.works/]diflucan tablets buy[/url] [url=http://neurontin.cfd/]gabapentin tablets for sale[/url] [url=http://clonidine.digital/]clonidine[/url] [url=http://ivermectin.creditcard/]stromectol 3 mg[/url] [url=http://buyphenergan.shop/]cheapest price for phenergan[/url] [url=http://phenergan.shop/]phenergan australia otc[/url] [url=http://buyamoxicillin.shop/]augmentin 600 42.9 mg[/url]
UgoCounk · May 31, 2022 at 7:01 am
[url=https://advair.store/]advair 250 coupon[/url]
MarkCounk · May 31, 2022 at 9:58 am
[url=https://phenergan.shop/]phenergan vc[/url]
JaneCounk · May 31, 2022 at 5:46 pm
[url=http://retina.cfd/]tretinoin gel purchase[/url]
UgoCounk · May 31, 2022 at 6:00 pm
[url=https://clopidogrel.store/]clopidogrel brand[/url]
JaneCounk · May 31, 2022 at 6:49 pm
[url=http://zoloft.shop/]zoloft medicine[/url]
LisaCounk · June 1, 2022 at 4:45 am
[url=https://medrol.online/]medrol 16mg tablets[/url]
BooCounk · June 1, 2022 at 10:03 am
[url=https://buylisinopril.shop/]buy zestril[/url] [url=https://clopidogrel.store/]prescription medicine plavix[/url] [url=https://plavix.shop/]plavix cost uk[/url] [url=https://effexor.store/]online effexor prescription[/url] [url=https://bactrim.store/]buy bactrim online canada[/url] [url=https://buydiclofenac.shop/]diclofenac 25 mg over the counter[/url]
WimCounk · June 1, 2022 at 6:05 pm
[url=https://ivermectin.properties/]stromectol where to buy[/url]
SueCounk · June 2, 2022 at 4:30 pm
[url=https://buycephalexin.shop/]cephalexin monohydrate[/url] [url=https://buysildalis.shop/]sildalis 120[/url] [url=https://buyaccutane.monster/]generic accutane online pharmacy[/url] [url=https://accutane.best/]buy 40mg accutane online[/url]
MiaCounk · June 2, 2022 at 6:35 pm
[url=https://accutane.best/]accutane without a prescription[/url]
WimCounk · June 2, 2022 at 10:45 pm
[url=https://tetracycline.store/]terramycin for chickens[/url]
off white shoes · June 3, 2022 at 12:46 pm
Spot on with this write-up, I really suppose this website needs rather more consideration. I抣l probably be once more to learn way more, thanks for that info.
MarkCounk · June 4, 2022 at 6:51 am
[url=https://suhagra.cfd/]suhagra 50 mg buy online india[/url]
yeezy 350 · June 4, 2022 at 7:17 am
I and also my buddies happened to be checking out the nice tips located on the blog while unexpectedly came up with a horrible suspicion I never expressed respect to the blog owner for those tips. All of the guys had been absolutely excited to read all of them and have in effect unquestionably been using them. I appreciate you for indeed being quite kind as well as for settling on this sort of magnificent areas millions of individuals are really wanting to know about. Our own honest regret for not expressing gratitude to you earlier.
LisaCounk · June 4, 2022 at 2:27 pm
[url=https://inderal.online/]propranolol order online[/url]
MaryCounk · June 5, 2022 at 1:57 am
[url=https://accutane.works/]buy accutane usa[/url] [url=https://vermox.store/]buy vermox canada[/url] [url=https://propranolol.email/]propranolol 2 cream[/url] [url=https://lisinopril.cfd/]zestril 25 mg[/url] [url=https://buycialis.shop/]brand cialis best price[/url]
IvyCounk · June 5, 2022 at 3:35 pm
[url=https://accutane.best/]order accutane online[/url] [url=https://metformin.golf/]glucophage 1000 mg price[/url]
kobe shoes · June 6, 2022 at 8:00 am
I not to mention my buddies happened to be following the good hints on your web page and then the sudden I had an awful suspicion I had not thanked the site owner for those techniques. These young boys were definitely as a consequence happy to study them and have in effect absolutely been loving those things. Many thanks for genuinely so thoughtful and then for pick out varieties of perfect themes millions of individuals are really needing to be aware of. Our own honest regret for not expressing gratitude to you sooner.
supreme shirt · June 6, 2022 at 8:00 am
I simply desired to say thanks yet again. I do not know the things that I could possibly have gone through in the absence of these concepts provided by you over my concern. It truly was a real frustrating situation in my view, nevertheless encountering this expert technique you solved the issue took me to leap over gladness. I am just grateful for your assistance and as well , hope that you recognize what a powerful job you happen to be getting into instructing some other people using your webpage. I am sure you’ve never encountered all of us.
off white hoodie · June 6, 2022 at 11:52 am
There may be noticeably a bundle to learn about this. I assume you made certain good factors in options also.
UgoCounk · June 6, 2022 at 10:08 pm
[url=https://lisinopril2022.com/]lisinopril cost us[/url]
JaneCounk · June 6, 2022 at 10:42 pm
[url=http://clonidine.agency/]clonidine 100mcg[/url]
WimCounk · June 7, 2022 at 12:47 am
[url=https://strattera.cfd/]strattera 40[/url]
hermes belts · June 7, 2022 at 1:51 am
There are some interesting closing dates in this article but I don抰 know if I see all of them heart to heart. There is some validity but I will take maintain opinion till I look into it further. Good article , thanks and we wish extra! Added to FeedBurner as effectively
AshCounk · June 7, 2022 at 4:44 am
[url=https://anafranil.shop/]anafranil 25[/url] [url=https://indocin.shop/]indocin pill[/url] [url=https://erectafil.agency/]buy erectafil[/url] [url=https://antabuse.boutique/]disulfiram purchase[/url] [url=https://phenergan.store/]phenergan[/url] [url=https://motilium.shop/]motilium 10mg canada[/url] [url=https://celebrex.cfd/]buy celebrex uk[/url]
PaulCounk · June 7, 2022 at 5:18 pm
[url=https://gabapentin.agency/]gabapentin 214[/url] [url=https://celebrex.cfd/]buy celebrex 200mg pills online[/url] [url=https://suhagra.boutique/]cheap suhagra[/url] [url=https://buypropranolol.store/]propranolol hemangioma[/url]
UgoCounk · June 7, 2022 at 10:04 pm
[url=https://buyfildena.shop/]fildena 120mg[/url]
IvyCounk · June 8, 2022 at 12:03 am
[url=http://ciprofloxacin.shop/]medicine ciprofloxacin 500mg[/url] [url=http://cephalexin.boutique/]keflex for urinary tract infection[/url] [url=http://celebrex.cfd/]celebrex drug[/url] [url=http://indocin.cfd/]indocin 100mg[/url] [url=http://nexium.store/]nexium sale price[/url] [url=http://strattera.cfd/]strattera price[/url] [url=http://finpecia.store/]best generic finasteride brand[/url] [url=http://budesonide.cfd/]budesonide 9 mg[/url]
LisaCounk · June 8, 2022 at 7:10 am
[url=https://budesonide.cfd/]budesonide 400 mcg[/url]
BooCounk · June 8, 2022 at 10:13 am
[url=https://zanaflex.cfd/]2mg tizanidine[/url] [url=https://budesonide.cfd/]budesonide from canada[/url] [url=https://erectafil.agency/]buy erectafil[/url]
SueCounk · June 8, 2022 at 7:05 pm
[url=http://phenergan.store/]phenergan 25 mg[/url] [url=http://antabuse.boutique/]disulfiram 500 mg tablet price[/url] [url=http://propeciatabs.com/]propecia 0.5 mg[/url] [url=http://suhagra.boutique/]suhagra 100 online india[/url] [url=http://ciprofloxacin.shop/]cipro for sale[/url] [url=http://cozaar.store/]cozaar price[/url] [url=http://buymetformin.monster/]can you buy metformin over the counter in canada[/url] [url=http://hydroxyzine.shop/]200 mg atarax[/url]
MarkCounk · June 9, 2022 at 12:37 am
[url=https://seroquel.shop/]seroquel pill 25 mg[/url]
PaulCounk · June 9, 2022 at 1:28 am
[url=https://tadacip.golf/]tadacip 5mg[/url] [url=https://indocin.shop/]indocin online[/url] [url=https://tadalafilpill.com/]buy cheap generic cialis online[/url] [url=https://strattera.cfd/]strattera 40 mg coupon[/url] [url=https://phenergan.store/]phenergan tablets 25mg uk[/url] [url=https://vermox365.com/]where can i buy vermox medication online[/url] [url=https://finasteride.agency/]finasteride otc[/url] [url=https://zanaflex.cfd/]tizanidine 60 mg[/url]
IvyCounk · June 9, 2022 at 3:29 am
[url=http://suhagra24.com/]cheap suhagra[/url] [url=http://seroquel.shop/]seroquel weight loss[/url] [url=http://tadacip.golf/]tadacip for sale[/url] [url=http://budesonide.cfd/]buy budesonide[/url] [url=http://cephalexin.boutique/]cephalexin antibiotics[/url] [url=http://buyfildena.shop/]buy fildena india[/url] [url=http://fluconazole.store/]can i buy diflucan online[/url] [url=http://vardenafil.agency/]generic levitra 20mg pills[/url]
SueCounk · June 9, 2022 at 9:24 am
[url=http://lisinopril2022.com/]lisinopril 20 mg uk[/url] [url=http://femaleviagra.shop/]best online viagra canada[/url] [url=http://antabuse.boutique/]antabuse 125 mg[/url] [url=http://albenza24.com/]albendazole 400mg[/url] [url=http://clonidine.agency/]clonidine 1.0[/url] [url=http://fluoxetine.shop/]prozac online australia[/url] [url=http://gabapentin.agency/]neurontin price india[/url] [url=http://buyaugmentin.shop/]augmentin 625 tablets[/url]
LisaCounk · June 9, 2022 at 10:49 am
[url=https://cipro.golf/]buy cipro cheap[/url]
SueCounk · June 10, 2022 at 4:26 am
[url=http://buypropranolol.store/]where can you get propranolol[/url] [url=http://celebrex.cfd/]cheap celebrex online[/url] [url=http://antabuse.boutique/]where to purchase antabuse[/url] [url=http://cephalexin.boutique/]keflex generic price[/url] [url=http://propeciatabs.com/]finasteride over the counter[/url]
AshCounk · June 10, 2022 at 5:25 pm
[url=https://cozaar.store/]cozaar online[/url] [url=https://suhagra.boutique/]suhagra 100mg[/url] [url=https://onlinepharmacy.email/]canadian pharmacy online ship to usa[/url] [url=https://diclofenac.store/]diclofenac price usa[/url]
MiaCounk · June 10, 2022 at 5:55 pm
[url=http://erectafil.agency/]erectafil from india[/url]
UgoCounk · June 11, 2022 at 8:19 am
[url=http://buyvardenafil.shop/]buy levitra in mexico[/url]
WimCounk · June 11, 2022 at 12:48 pm
[url=https://albenza24.com/]albendazole price in us[/url]
IvyCounk · June 11, 2022 at 2:05 pm
[url=http://indocin.shop/]indocin brand name[/url] [url=http://onlinepharmacy.email/]canadadrugpharmacy com[/url] [url=http://hydroxyzine.shop/]atarax 25 mg tablet price[/url] [url=http://lisinopril2022.com/]lisinopril tablet[/url] [url=http://anafranil.shop/]anafranil price us[/url] [url=http://buyprozac.shop/]prozac 40 mg daily[/url] [url=http://fluconazole.store/]diflucan over the counter south africa[/url]
WimCounk · June 11, 2022 at 7:50 pm
[url=https://diclofenac.shop/]can i buy voltaren in usa[/url]
MaryCounk · June 12, 2022 at 12:00 am
[url=https://diflucansale.com/]diflucan cap 150 mg[/url] [url=https://indocin.cfd/]buy indocin online[/url] [url=https://anafranil.shop/]anafranil tablet[/url] [url=https://hydroxyzine.shop/]atarax pill[/url] [url=https://ciprofloxacin.shop/]ciprofloxacin uk[/url] [url=https://onlinepharmacy.email/]prescription free canadian pharmacy[/url] [url=https://albenza24.com/]price of albendazole tablet in india[/url]
JaneCounk · June 12, 2022 at 3:07 pm
[url=http://finpecia.store/]propecia australia price[/url]
MiaCounk · June 13, 2022 at 3:51 am
[url=http://vardenafil.agency/]levitra tablet in india[/url]
JaneCounk · June 13, 2022 at 12:25 pm
[url=http://buymetformin.monster/]metformin 500 mg buy[/url]
PaulCounk · June 13, 2022 at 11:34 pm
[url=https://buyaugmentin.shop/]amoxicillin no script[/url] [url=https://budesonide.cfd/]over the counter budesonide[/url] [url=https://diclofenac.store/]buy voltaren tablets online[/url] [url=https://diflucansale.com/]can i buy diflucan over the counter in usa[/url] [url=https://buyalbenza.store/]cheap albenza[/url] [url=https://toradol.shop/]toradol medication[/url]
BooCounk · June 14, 2022 at 6:23 am
[url=https://erythromycin.cfd/]where to order erythromycin[/url] [url=https://nexium.store/]nexium 20 mg price australia[/url] [url=https://zoviraxz.com/]buy acyclovir without a prescription[/url] [url=https://sildenafil24.com/]buy sildenafil pills[/url] [url=https://levitragenuine.com/]canadian pharmacy generic levitra[/url] [url=https://diflucan.boutique/]diflucan pills online[/url] [url=https://erythromycinbio.com/]erythromycin 0.5[/url]
SueCounk · June 14, 2022 at 12:51 pm
[url=http://buybaclofen.shop/]baclofen price south africa[/url] [url=http://toradol.shop/]toradol for back pain[/url] [url=http://femaleviagra.shop/]buy 150 mg viagra online[/url] [url=http://anafranil.shop/]anafranil 75 mg[/url] [url=http://buymetformin.monster/]how to buy metformin in usa[/url] [url=http://vermox.email/]vermox pharmacy usa[/url] [url=http://seroquel.shop/]seroquel for sale[/url] [url=http://lisinopril2022.com/]zestoretic 20 price[/url]
MaryCounk · June 14, 2022 at 12:59 pm
[url=https://albenza24.com/]buy albendazole[/url] [url=https://antabuse.boutique/]antabuse tablets uk[/url] [url=https://buymetformin.monster/]cost of metformin 1000 mg[/url] [url=https://seroquel.shop/]order seroquel online[/url] [url=https://duloxetine.shop/]buy cymbalta 30mg[/url] [url=https://hydroxyzine.shop/]atarax tablet price in india[/url] [url=https://toradol.shop/]toradol brand name[/url]
TeoCounk · June 14, 2022 at 10:21 pm
[url=http://finpecia.store/]propecia prescription price[/url]
UgoCounk · June 15, 2022 at 2:08 am
[url=http://budesonide.cfd/]rx budesonide[/url]
WimCounk · June 15, 2022 at 4:29 am
[url=http://accutane.cfd/]accutane cost[/url]
TedCounk · June 15, 2022 at 7:51 am
[url=http://fluoxetine.shop/]fluoxetine price[/url]
TommyHepsy · June 15, 2022 at 8:40 am
[url=https://diclofenac.shop/]diclofenac 1.16 gel price[/url]
AshCounk · June 15, 2022 at 8:48 am
[url=http://cafergot.shop/]cafergot medicine[/url] [url=http://tetracycline.cfd/]terramycin crumbles[/url] [url=http://finpecia.store/]propecia 2mg[/url] [url=http://avodart.agency/]how much is avodart cost[/url] [url=http://norxamoxicillin.com/]amoxicillin purchase[/url] [url=http://buysildenafil.shop/]buy viagra pills uk[/url] [url=http://motilium.shop/]motilium uk prescription[/url] [url=http://buyvaltrex.shop/]valtrex script online[/url]
BooCounk · June 15, 2022 at 9:43 am
[url=http://budesonide.cfd/]can you buy budesonide over the counter[/url] [url=http://indocin.cfd/]indocin 25 mg price[/url]
AlanCounk · June 15, 2022 at 1:25 pm
[url=https://buysildenafil.store/]order female viagra online[/url] [url=https://lisinopril.golf/]buy lisinopril uk[/url] [url=https://buyavodart.shop/]avodart online prescription[/url] [url=https://flomax.shop/]buy flomax online uk[/url] [url=https://avana.cfd/]can you buy dapoxetine over the counter[/url] [url=https://trazodone2022.com/]buy trazodone 25 mg[/url] [url=https://valtrex.email/]valtrex rx coupon[/url] [url=https://modafinil.email/]modafinil for sale[/url] [url=https://bactrim.golf/]purchase bactrim ds[/url] [url=https://ampicillin.shop/]ampicillin sulbactam[/url]
IvyCounk · June 15, 2022 at 4:07 pm
[url=http://buyavodart.shop/]avodart 0.5 mg tab[/url] [url=http://albenza.boutique/]albenza 400 mg[/url] [url=http://proscartabs.com/]canadian pharmacy generic propecia[/url] [url=http://finasteride911.com/]propecia[/url] [url=http://celexa.shop/]online celexa discount[/url] [url=http://bactrim.golf/]bactrim 4800[/url] [url=http://valtrex.email/]buy valtrex no prescription[/url]
JackCounk · June 15, 2022 at 5:36 pm
[url=http://silagra.shop/]silagra from india[/url]
Samuelraisk · June 15, 2022 at 5:45 pm
[url=http://antabuse365.com/]antabuse 250 mg[/url]
RodneyTab · June 15, 2022 at 6:59 pm
[url=https://dutasteride.store/]drug avodart[/url]
Estebanguall · June 16, 2022 at 6:15 am
[url=http://buytadacip.shop/]buy tadacip 20 mg without prescription[/url]
WimCounk · June 16, 2022 at 8:17 am
[url=http://albenza24.com/]albendazole price uk[/url]
JasonCounk · June 16, 2022 at 8:18 am
[url=https://ventolin.store/]buy albuterol online without a prescription[/url]
MiclTek · June 16, 2022 at 8:23 am
[url=http://diclofenac.shop/]diclofenac australia over the counter[/url]
Curtisvibia · June 16, 2022 at 2:56 pm
[url=https://dapoxetine.shop/]dapoxetine for sale[/url]
KimCounk · June 16, 2022 at 3:52 pm
[url=http://valtrex.shop/]valtrex generic cost[/url]
PaulCounk · June 16, 2022 at 4:23 pm
[url=http://tadacip.cfd/]tadacip india price[/url]
RobertFoold · June 16, 2022 at 6:28 pm
[url=https://viagra200mgprice.quest/]where can i buy viagra pills online[/url]
JoeCounk · June 16, 2022 at 7:14 pm
[url=http://vermox.cfd/]vermox medicine[/url] [url=http://gabapentin.cfd/]neurontin 100mg cap[/url] [url=http://cozaar.shop/]how much is cozaar[/url] [url=http://buysildenafil.store/]where can i buy sildenafil tablets[/url] [url=http://avana.cfd/]dapoxetine 60 mg price in india[/url] [url=http://biaxin.store/]biaxin[/url] [url=http://estrace.shop/]estrace canadian[/url]
TommyHepsy · June 16, 2022 at 8:49 pm
[url=https://cialisgenericonlinepharmacy.monster/]can you buy cialis online from canada[/url]
MaryCounk · June 16, 2022 at 11:03 pm
[url=http://modafinil24.com/]modafinil 200mg cost[/url] [url=http://avana.cfd/]dapoxetine 2016[/url] [url=http://metforminpill.com/]metformin over the counter canada[/url]
LisaCounk · June 16, 2022 at 11:18 pm
[url=http://ventolin.store/]albuterol capsule[/url]
MichaelDwego · June 17, 2022 at 1:21 am
[url=https://viagracheaptabletforsaleonline.quest/]sildenafil prescription nz[/url]
AmyCounk · June 17, 2022 at 2:05 am
[url=https://levofloxacin.shop/]levaquin.com[/url]
MaryCounk · June 17, 2022 at 2:49 am
[url=http://modafinil24.com/]modafinil pills online[/url] [url=http://vermox.cfd/]vermox in usa[/url] [url=http://lisinopril.golf/]lisinopril 10 mg online[/url] [url=http://sildalis.golf/]sildalis india[/url] [url=http://metformin2022.com/]metformin 800 mg[/url] [url=http://doxycycline.golf/]doxycycline[/url]
Charlesaduse · June 17, 2022 at 3:44 am
[url=https://viagragenerictabletforsaleonline.monster/]buy cheap sildenafil[/url]
AshCounk · June 17, 2022 at 1:45 pm
[url=http://tetracycline.cfd/]tetracycline 500mg price in india[/url] [url=http://biaxin.shop/]biaxin for lyme[/url] [url=http://dapoxetine.shop/]dapoxetine price usa[/url] [url=http://acyclovirtabs.com/]acyclovir 200 mg[/url] [url=http://norxamoxicillin.com/]amoxicillin 875 price[/url] [url=http://fluoxetine.cfd/]buy prozac online[/url] [url=http://avodart5.com/]avodart 0.5 mg price[/url]
JosephMaict · June 17, 2022 at 1:54 pm
[url=https://orderviagra100mgonline.monster/]sildenafil price comparison[/url] [url=https://genericviagramedicineforsaleonline.monster/]canadian pharmacy viagra uk[/url] [url=https://cheapviagra150mgwithoutprescription.monster/]female viagra canada[/url]
KiaCounk · June 17, 2022 at 4:00 pm
[url=https://valtrex.shop/]herpes medication valtrex[/url]
http://ubezpieczenia-trojmiasto.pl · June 17, 2022 at 6:14 pm
Data from the United Kingdom is now not included in datasets with reference dates after 2020.
Michaelemult · June 17, 2022 at 6:34 pm
[url=http://cialisonlinetabletpharmacy.monster/]generic cialis otc[/url]
Curtisvibia · June 17, 2022 at 6:51 pm
[url=https://viagragenerictabletforsaleonline.monster/]sildenafil 100mg uk cheapest[/url]
SamCounk · June 17, 2022 at 7:07 pm
[url=https://avana.cfd/]super avana coupon[/url] [url=https://atarax.cfd/]atarax tab 10mg[/url] [url=https://celexa.shop/]celexa buy online uk[/url]
JudyCounk · June 17, 2022 at 8:03 pm
[url=https://lisinopril.golf/]3 lisinopril[/url]
EyeCounk · June 17, 2022 at 8:09 pm
[url=https://levofloxacin.shop/]levaquin medication[/url] [url=https://vermox.cfd/]vermox 500 tablet[/url] [url=https://doxycycline.golf/]doxycycline singapore[/url] [url=https://lisinopril.golf/]1 lisinopril[/url]
https://Bit.ly/3PT713Q · June 17, 2022 at 10:04 pm
Typically, courts construe ambiguities in insurance
insurance policies against the insurance firm and in favor of coverage
under the policy.
Estebanguall · June 17, 2022 at 10:55 pm
[url=http://buyviagratabwithoutprescription.quest/]how much is sildenafil[/url]
https://Rebrand.ly · June 17, 2022 at 11:53 pm
Daycare treatments are performed beneath local or common anaesthesia in a clinic, hospital, or daycare heart.
Charlesaduse · June 18, 2022 at 2:51 am
[url=https://cheapcialistabletsbuyonline.monster/]cialis brand[/url]
https://bit.ly/3kLNEMb · June 18, 2022 at 2:59 am
https://cutt.ly/tTQzqCp
https://is.gd/ · June 18, 2022 at 4:41 am
Green Card holders, and all staff or subcontractors hired
on overseas government contracts.
AmyCounk · June 18, 2022 at 5:21 am
[url=https://buywellbutrin.shop/]wellbutrin 75 mg daily[/url]
tinyurl.com · June 18, 2022 at 8:38 am
Producer Mailing ListsMailing lists for energetic individuals, agencies,
and insurance firms and order forms.
ElwoodGon · June 18, 2022 at 8:38 am
[url=http://bestviagratabletsale.quest/]best price for sildenafil[/url]
BooCounk · June 18, 2022 at 11:07 am
[url=http://seroquel.shop/]seroquel 05[/url]
WimCounk · June 18, 2022 at 2:26 pm
[url=http://acyclovirtabs.com/]zovirax 200 mg capsule[/url]
cutt.ly · June 18, 2022 at 3:17 pm
The report is based on yearly reported Solvency II
information.
ZakCounk · June 18, 2022 at 5:10 pm
[url=http://levofloxacin.shop/]levaquin.com[/url] [url=http://nolvadex.cfd/]buy nolvadex online canada[/url]
JaneCounk · June 18, 2022 at 5:54 pm
[url=http://ampicillin.shop/]ampicillin tablet 500mg[/url]
TimothyThive · June 18, 2022 at 6:15 pm
[url=http://cheapcialistabsbuying.monster/]best price cialis canada[/url]
Charlesaduse · June 18, 2022 at 7:55 pm
[url=http://buycialis40withoutprescription.monster/]generic cialis 2.5 mg[/url]
LisaCounk · June 18, 2022 at 8:31 pm
[url=http://finasteride911.com/]buy propecia over the counter[/url]
Curtisvibia · June 18, 2022 at 9:17 pm
[url=http://onlinecialisdrugforsale.quest/]generic cialis 20 mg from india[/url]
DenCounk · June 18, 2022 at 11:43 pm
[url=https://modafinil24.com/]buy generic modafinil[/url]
MarvinZem · June 19, 2022 at 2:31 am
[url=https://buygenericcialistablet.quest/]cialis in canada cost[/url]
RodneyTab · June 19, 2022 at 3:38 am
[url=https://buyviagrapillswithnorx.monster/]buy viagra nyc[/url]
WilliamWem · June 19, 2022 at 5:31 am
[url=http://cialis10lowcost.quest/]5mg tadalafil from canada[/url] [url=http://bestviagratabprescription.quest/]viagra tablet price in singapore[/url] [url=http://onlinecialisdrugwithoutprescription.monster/]cialis generic 60 mg[/url] [url=http://bestcialis40withnoprescription.monster/]cialis online cheap[/url]
DarrylSef · June 19, 2022 at 5:55 am
[url=http://cheapviagra50lowcost.monster/]viagra buy[/url] [url=http://onlinecialispillsnoprescription.monster/]generic cialis cheapest price[/url] [url=http://cheapcialis10pill.quest/]generic cialis from india[/url] [url=http://bestcialis5norx.monster/]cialis.com[/url] [url=http://bestviagratabprescription.quest/]viagra generic otc[/url] [url=http://bestcialis20withnoprescription.monster/]generic cialis[/url] [url=http://cialisonlinemedicinepharmacy.monster/]can i buy generic cialis[/url] [url=http://cialistabletwithnoprescription.monster/]cialis canada 20mg[/url]
noweubezpieczenia.pl · June 19, 2022 at 6:32 am
Neither insurance consultants nor insurance brokers are insurance corporations and no risks are transferred to
them in insurance transactions.
Jameseloro · June 19, 2022 at 7:08 am
[url=https://cheapviagra100noprescription.quest/]uk viagra buy[/url] [url=https://genericcialistabletswithnoprescription.quest/]how much is tadalafil[/url] [url=https://pharmacyviagra2021.monster/]buying viagra over the counter in usa[/url] [url=https://bestcialis40withnoprescription.monster/]tadalafil 20mg for sale[/url] [url=https://viagraonlinemedicationforsaleonline.monster/]generic viagra india pharmacy[/url] [url=https://orderviagratabwithnorx.quest/]buy viagra gel[/url] [url=https://onlinecialis10mgnorx.quest/]cialis 100mg pills[/url]
https://bit.ly/3tk0B4O · June 19, 2022 at 7:26 am
By the late nineteenth century governments started to provoke national insurance applications towards illness and old age.
IvyCounk · June 19, 2022 at 8:53 am
[url=http://benicar.shop/]cost of benicar[/url] [url=http://finasteride911.com/]where can i buy finasteride[/url] [url=http://modafinil24.com/]modafinil pharmacy uk[/url] [url=http://buyclomid.store/]can you buy clomid over the counter us[/url] [url=http://clomid.agency/]clomiphene for sale[/url] [url=http://trazodone2022.com/]trazodone generic price[/url]
NickCounk · June 19, 2022 at 9:25 am
[url=https://nolvadex.cfd/]where to buy tamoxifen in singapore[/url]
bit.ly · June 19, 2022 at 12:51 pm
Stop-loss insurance offers safety in opposition to catastrophic
or unpredictable losses.
WimCounk · June 19, 2022 at 1:23 pm
[url=http://buysildalis.quest/]sildalis tablets[/url]
Jameseloro · June 19, 2022 at 2:29 pm
[url=https://buyingbestviagrapill.monster/]cost of generic sildenafil[/url] [url=https://buyviagratabletrx.quest/]sildenafil online europe[/url] [url=https://ordercialistabletswithnoprescription.quest/]cheap cialis online australia[/url] [url=https://genericcialis10prescription.quest/]canada cialis pills[/url]
Michaelemult · June 19, 2022 at 2:43 pm
[url=https://genericviagrapillsforsale.monster/]viagra 5343[/url]
LisaCounk · June 19, 2022 at 3:08 pm
[url=http://trazodone2022.com/]price of trazodone[/url]
https://Is.gd/n85rHK · June 19, 2022 at 5:04 pm
Travel insurance protects travelers in case of emergency or interruption of a trip.
rebrand.ly · June 19, 2022 at 5:14 pm
It is mostly printed on the insurance card that is issued by the insurance suppliers.
MiaCounk · June 19, 2022 at 6:23 pm
[url=http://buysildenafil.store/]generic viagra prices in usa[/url]
JudyCounk · June 19, 2022 at 9:40 pm
[url=https://buyclomid.store/]how to order clomid[/url]
AshCounk · June 19, 2022 at 11:36 pm
[url=http://cipro.golf/]buy ciprofloxacin uk[/url] [url=http://buymetformin.quest/]metformin canada pharmacy[/url] [url=http://hydroxychloroquine.email/]hydroxychloroquine 200mg[/url]
bit.ly · June 19, 2022 at 11:36 pm
https://tinyurl.com/3afpwj45
MiclTek · June 20, 2022 at 12:21 am
[url=http://viagrabestmedicinepharmacy.monster/]viagra 100mg price comparison[/url]
RicIsose · June 20, 2022 at 1:44 am
[url=https://genericviagradrugnoprescription.monster/]order viagra online us[/url] [url=https://onlinecialis20rx.quest/]generic tadalafil coupon[/url] [url=https://cialistabletwithoutrx.monster/]canada cialis[/url] [url=https://cialis5mgtablets.quest/]tadalafil 5 mg tablet price[/url]
tinyurl.com · June 20, 2022 at 1:54 am
https://Cztery-Kopyta.pl/
MichaelDwego · June 20, 2022 at 1:59 am
[url=http://genericviagrapills.monster/]over the counter viagra[/url]
Charlesaduse · June 20, 2022 at 4:43 am
[url=http://genericcialis10.quest/]generic cialis 5mg[/url]
AnnaCounk · June 20, 2022 at 5:32 am
[url=https://buyretina.monster/]cost of tretinoin cream[/url]
MaryCounk · June 20, 2022 at 10:39 am
[url=http://valtrex.email/]cheap valtrex for sale[/url] [url=http://clonidine.shop/]buy clonidine usa[/url] [url=http://modafinil.golf/]modafinil online australia[/url]
WilliamWem · June 20, 2022 at 2:18 pm
[url=https://buycipro.quest/]ciprofloxacin pharmacy[/url] [url=https://domperidone.shop/]motilium tablets over the counter[/url] [url=https://suhagra.email/]suhagra tablet 50 mg[/url]
AnnaCounk · June 20, 2022 at 2:53 pm
[url=https://metforminpill.com/]metformin 1500 mg[/url]
KiaCounk · June 20, 2022 at 6:40 pm
[url=https://gabapentin.cfd/]gabapentin without prescription[/url]
RichardFaply · June 20, 2022 at 8:05 pm
[url=http://buytadacip.monster/]tadacip 20 mg online india[/url] [url=http://valtrex.boutique/]how to buy valtrex online[/url] [url=http://buypillsonline.shop/]minocycline 100 mg capsule buy online[/url] [url=http://piroxicam.shop/]piroxicam buy online[/url] [url=http://buytetracycline.shop/]where can i buy terramycin eye ointment for my cat[/url] [url=http://baclofen.store/]baclofen drug[/url] [url=http://buyglucophage.shop/]metformin 850g[/url]
https://bit.ly/ · June 20, 2022 at 9:51 pm
https://Yard-Equites.pl/
MarkCounk · June 21, 2022 at 12:04 am
[url=http://levofloxacin.shop/]buy levaquin online[/url]
TommyHepsy · June 21, 2022 at 12:12 am
[url=http://buyclomid.monster/]clomid 2017[/url]
Curtisvibia · June 21, 2022 at 1:51 am
[url=https://bactrim.agency/]buy bactrim without prescription[/url]
UgoCounk · June 21, 2022 at 2:08 am
[url=http://chloroquinepak.com/]aralen 150 mg tab[/url]
Michaeldrist · June 21, 2022 at 7:10 am
[url=http://avodart.boutique/]cheap avodart[/url]
WilliamWem · June 21, 2022 at 8:31 am
[url=https://propranolol.boutique/]propranolol medicine in india[/url] [url=https://buylisinopril.monster/]lisinopril 10 mg for sale[/url] [url=https://buycolchicine.shop/]colchicine 0.5 mg[/url] [url=https://allopurinol.boutique/]cheapest price for allopurinol 300mg[/url]
CarlCounk · June 21, 2022 at 11:36 am
[url=https://lisinopril.golf/]lisinopril brand name in india[/url]
AmyCounk · June 21, 2022 at 1:16 pm
[url=https://levofloxacin.shop/]buy levaquin online[/url]
TimothyThive · June 21, 2022 at 3:09 pm
[url=https://gabapentin365.com/]neurontin 214[/url]
Jameseloro · June 21, 2022 at 4:28 pm
[url=https://suhagra.email/]suhagra 25 mg price[/url] [url=https://buyglucophage.shop/]metformin without script[/url] [url=https://avodart.boutique/]avodart prescription[/url] [url=https://buyclomid.monster/]clomid online pharmacy[/url] [url=https://clomid.golf/]clomid where to buy[/url] [url=https://trazodone.agency/]trazodone otc[/url]
PaulCounk · June 21, 2022 at 8:57 pm
[url=https://buyfinpecia.shop/]5mg propecia tablets[/url]
RobertFoold · June 21, 2022 at 10:15 pm
[url=https://buylisinopril.monster/]lisinopril 12.5 mg tablets[/url]
PaulCounk · June 22, 2022 at 1:36 am
[url=https://buymodafinil.monster/]buy real modafinil[/url]
UgoCounk · June 22, 2022 at 2:18 am
[url=http://cipro.cfd/]cipro 250 mg tablet[/url]
JaneCounk · June 22, 2022 at 3:22 am
[url=https://buypills.shop/]where can i buy nitrofurantoin[/url]
EvaCounk · June 22, 2022 at 4:03 am
[url=https://buyaccutane.store/]accutane 10mg for sale[/url]
LisaCounk · June 22, 2022 at 4:14 am
[url=https://erectafil.shop/]erectafil 5[/url]
ZakCounk · June 22, 2022 at 5:06 am
[url=http://acyclovir.email/]acyclovir 400 mg tablets buy[/url] [url=http://metformin.email/]can you order metformin online[/url] [url=http://accutane.golf/]roaccutane 20mg[/url] [url=http://prazosin.shop/]prazosin medication[/url]
MichaelGuabe · June 22, 2022 at 5:53 am
[url=https://lipitor.store/]atorvastatin lipitor[/url]
DavisMug · June 22, 2022 at 10:12 am
[url=http://buyclomid.monster/]100mg clomid[/url]
Estebanguall · June 22, 2022 at 10:19 am
[url=https://buytadalafil.store/]best price tadalafil 20 mg[/url]
MichaelDwego · June 22, 2022 at 10:24 am
[url=https://buyallopurinol.shop/]allopurinol 3[/url]
TimothyThive · June 22, 2022 at 10:41 am
[url=https://neurontin.shop/]gabapentin 2018[/url]
DenCounk · June 22, 2022 at 11:13 am
[url=http://zoloft.agency/]cheap generic zoloft[/url]
MiaCounk · June 22, 2022 at 12:56 pm
[url=https://buytrazodone.store/]discount desyrel[/url]
RobertFoold · June 22, 2022 at 1:53 pm
[url=https://phenergan.cfd/]phenergan 10mg tab[/url]
Samuelraisk · June 22, 2022 at 2:27 pm
[url=https://piroxicam.shop/]piroxicam 20 mg[/url]
TimothyThive · June 22, 2022 at 4:06 pm
[url=https://priligy.shop/]dapoxetine 60mg buy[/url]
NickCounk · June 22, 2022 at 6:33 pm
[url=https://malegra.shop/]malegra 200 mg[/url]
RicIsose · June 22, 2022 at 6:39 pm
[url=http://toradol.cfd/]toradol prescription[/url] [url=http://bactrim.agency/]bactrim ds 800 160 tab[/url] [url=http://acyclovir.cfd/]zovirax price[/url] [url=http://sertraline.shop/]zoloft generic cost 25mg[/url] [url=http://clonidine.golf/]clonidine prescription cost[/url] [url=http://suhagra.email/]suhagra online india[/url]
RichardFaply · June 22, 2022 at 8:23 pm
[url=http://buyaugmentin.store/]amoxicillin 800[/url] [url=http://avodart.boutique/]generic avodart no prescription[/url] [url=http://tadacip.boutique/]tadacip 20 uk[/url] [url=http://piroxicam.shop/]piroxicam generic[/url] [url=http://buynolvadex.shop/]nolvadex 20[/url] [url=http://buytetracycline.shop/]buy tetracycline cream[/url] [url=http://allopurinol.boutique/]allopurinol 500[/url] [url=http://buycipro.quest/]where to get ciprofloxacin[/url]
Jameseloro · June 22, 2022 at 11:09 pm
[url=https://priligy.shop/]dapoxetine approval[/url] [url=https://interbetpharmacy.store/]cheapest pharmacy for prescription drugs[/url]
Jameseloro · June 23, 2022 at 1:55 am
[url=https://buynolvadex.shop/]buy nolvadex online[/url] [url=https://baclofen.store/]baclofen 500 mg[/url] [url=https://clomid.golf/]clomid prices uk[/url] [url=https://allopurinol.boutique/]best allopurinol brand[/url]
JackCounk · June 23, 2022 at 4:34 am
[url=http://buyretina.store/]where can i get retin a[/url]
UgoCounk · June 23, 2022 at 7:03 am
[url=https://retina.email/]tretinoin 1 cream coupon[/url]
JoeCounk · June 23, 2022 at 7:41 am
[url=http://erectafil.shop/]erectafil 40 mg[/url] [url=http://erectafil.golf/]buy erectafil[/url] [url=http://zoloft.agency/]buy generic zoloft[/url]
ElwoodGon · June 23, 2022 at 7:59 am
[url=http://buyatarax.shop/]over the counter atarax[/url]
KiaCounk · June 23, 2022 at 8:41 am
[url=http://buykamagra.shop/]super kamagra jelly uk[/url]
DarrylSef · June 23, 2022 at 9:12 am
[url=http://augmentin.golf/]amoxicillin 250 mg[/url] [url=http://buylisinopril.monster/]zestoretic 10 12.5 mg[/url] [url=http://cephalexin.golf/]keflex prescription price[/url] [url=http://interbetpharmacy.store/]reputable indian online pharmacy[/url] [url=http://avodart.boutique/]avodart 0.5 mg uk[/url] [url=http://buyallopurinol.shop/]allopurinol tab brand name in india[/url]
cutt.ly · June 23, 2022 at 10:15 am
Start your quote now and create a customized coverage that protects your journey wherever
the road takes you.
rebrand.ly · June 23, 2022 at 10:22 am
Earthquake insurance is a form of property insurance that
pays the policyholder within the occasion of an earthquake
that causes harm to the property.
Michaeldrist · June 23, 2022 at 11:08 am
[url=http://buyaugmentin.store/]buy cheap augmentin[/url]
https://tinyurl.com · June 23, 2022 at 1:22 pm
Depending on the corporate’s specific policies
it would or might not cover the deductible as properly.
SamCounk · June 23, 2022 at 2:04 pm
[url=https://prazosin.shop/]prazosin 1 mg[/url] [url=https://buypills.shop/]vantin 200[/url] [url=https://buykamagra.shop/]amazon kamagra oral jelly[/url] [url=https://sildalis24.com/]sildalis cheap[/url]
Samuelraisk · June 23, 2022 at 2:05 pm
[url=https://toradol.cfd/]toradol prescription[/url]
MarkCounk · June 23, 2022 at 2:12 pm
[url=https://zithromax.cfd/]zithromax best price[/url]
RodneyTab · June 23, 2022 at 4:59 pm
[url=http://cipro.agency/]cheap ciprofloxacin 500mg[/url]
Estebanguall · June 23, 2022 at 6:08 pm
[url=https://tadacip.boutique/]cheap tadacip[/url]
TedCounk · June 23, 2022 at 7:20 pm
[url=http://augmentin.cfd/]how much is amoxicillin 500 mg[/url]
BooCounk · June 23, 2022 at 8:44 pm
[url=https://vardenafil.email/]vardenafil generic us[/url]
BooCounk · June 23, 2022 at 9:50 pm
[url=https://levofloxacin.shop/]levaquin 250[/url]
RicIsose · June 23, 2022 at 10:31 pm
[url=http://toradol.cfd/]toradol nasal spray[/url] [url=http://gabapentin.golf/]gabapentin 800 mg cost[/url] [url=http://acyclovir.boutique/]zovirax 5 cream cost[/url]
TimothyThive · June 24, 2022 at 1:36 am
[url=https://buytetracycline.shop/]terramycin cream where to buy[/url]
JasonCounk · June 24, 2022 at 1:52 am
[url=http://buymodafinil.monster/]provigil generic price[/url]
YonCounk · June 24, 2022 at 3:33 am
[url=http://dipyridamole.store/]dipyridamole brand name uk[/url]
WimCounk · June 24, 2022 at 3:47 am
[url=https://buyaccutane.monster/]accutane singapore[/url]
MiclTek · June 24, 2022 at 4:06 am
[url=http://piroxicam.shop/]piroxicam price in india[/url]
Charlesaduse · June 24, 2022 at 4:54 am
[url=https://suhagra.email/]suhagra tablet online purchase[/url]
TimothyThive · June 24, 2022 at 7:49 am
[url=https://buyaugmentin.store/]amoxicillin 500g[/url]
JaneCounk · June 24, 2022 at 8:16 am
[url=https://elimite.shop/]buy acticin online[/url]
JimCounk · June 24, 2022 at 10:55 am
[url=http://albuterol.email/]combivent brand name[/url]
Davidhup · June 24, 2022 at 11:37 am
[url=http://buyclomid.monster/]clomid online australia[/url]
TeoCounk · June 24, 2022 at 11:44 am
[url=http://priligy.cfd/]buy dapoxetine 60 mg in india[/url]
JudyCounk · June 24, 2022 at 12:53 pm
[url=http://malegra.shop/]buy malegra 50[/url]
JosephMaict · June 24, 2022 at 1:18 pm
[url=https://baclofen.store/]baclofen cost[/url] [url=https://buypropecia.quest/]propecia 5mg tablets[/url] [url=https://clomid.golf/]glucophage clomid[/url] [url=https://toradol.cfd/]toradol 10mg[/url] [url=https://lipitor.store/]cost of generic lipitor in canada[/url]
AshCounk · June 24, 2022 at 3:17 pm
[url=https://cafergot2019.com/]cafergot tablets buy online[/url] [url=https://gabapentin.cfd/]order neurontin over the counter[/url]
TedCounk · June 24, 2022 at 3:48 pm
[url=http://propeciamed.com/]finasteride 5 mg tablet cost[/url]
RicIsose · June 24, 2022 at 4:12 pm
[url=http://buycelebrex.shop/]celebrex tablet in india[/url] [url=http://baclofen.store/]where to buy baclofen[/url] [url=http://onlinepharmacy.golf/]canada cloud pharmacy[/url] [url=http://neurontin.shop/]gabapentin 500 mg[/url]
bit.ly · June 24, 2022 at 6:08 pm
Each insurer is solely responsible for the claims on its
policies and pays PAA for insurance policies sold.
DarrylSef · June 24, 2022 at 6:53 pm
[url=http://buytetracycline.shop/]terramycin uk[/url] [url=http://toradol.cfd/]toradol 150 mg[/url] [url=http://gabapentin.golf/]neurontin 300 mg caps[/url] [url=http://priligy.shop/]dapoxetine 30mg tablet[/url] [url=http://propranolol.boutique/]propranolol for sale without prescription[/url] [url=http://buycolchicine.shop/]can you buy colchicine over the counter[/url] [url=http://bactrim.agency/]bactrim online[/url]
Michaeldrist · June 24, 2022 at 9:12 pm
[url=http://allopurinol.boutique/]allopurinol uk online[/url]
MarvinZem · June 24, 2022 at 9:41 pm
[url=http://domperidone.shop/]motilium otc uk[/url]
https://tinyurl.com/5feyup4t · June 24, 2022 at 9:51 pm
Insurance entails pooling funds from many insured entities to pay for the losses
that only some insureds could incur.
https://rebrand.ly · June 24, 2022 at 10:38 pm
MetLife Pet Insurance Solutions LLC is the policy administrator authorized by IAIC and MetGen to offer and administer pet insurance insurance policies.
JimCounk · June 25, 2022 at 12:29 am
[url=http://atomoxetine.store/]strattera cost canada[/url]
JasonCounk · June 25, 2022 at 12:34 am
[url=http://propeciamed.com/].5mg propecia daily[/url]
Edgarlor · June 25, 2022 at 1:23 am
[url=http://acyclovir.boutique/]zovirax 200mg tablets price in india[/url]
UgoCounk · June 25, 2022 at 3:28 am
[url=https://lisinopril.golf/]lisinopril 20 mg for sale[/url]
KimCounk · June 25, 2022 at 3:54 am
[url=http://finasteride.golf/]buy propecia online canada[/url]
Samuelraisk · June 25, 2022 at 4:09 am
[url=https://allopurinol.boutique/]allopurinol coupon[/url]
RicIsose · June 25, 2022 at 7:17 am
[url=http://buypillsonline.shop/]brand minocycline[/url] [url=http://buyclomid.monster/]clomid prescription coupon[/url] [url=http://lisinopril.agency/]cost of lisinopril 5 mg[/url]
DavisMug · June 25, 2022 at 9:47 am
[url=http://acyclovir.cfd/]acyclovir 800 mg daily[/url]
MiclTek · June 25, 2022 at 10:02 am
[url=http://allopurinol.boutique/]allopurinol ordering[/url]
TeoCounk · June 25, 2022 at 11:27 am
[url=http://finasteride.golf/]buy propecia no prescription[/url]
BooCounk · June 25, 2022 at 11:46 am
[url=https://estrace.shop/]estrace pill cost[/url]
Davidhup · June 25, 2022 at 12:57 pm
[url=http://buyatarax.shop/]atarax buy[/url]
RicIsose · June 25, 2022 at 1:25 pm
[url=http://buylisinopril.monster/]lisinopril 10 mg tablet cost[/url] [url=http://buyclomid.monster/]clomid online paypal[/url] [url=http://buytadalafil.store/]order real cialis[/url] [url=http://clomid.golf/]can you buy clomid otc[/url] [url=http://buytetracycline.shop/]tetracycline to buy[/url] [url=http://buycelebrex.shop/]celebrex generic price[/url]
MaryCounk · June 25, 2022 at 1:55 pm
[url=https://malegra.shop/]malegra 120 mg[/url] [url=https://buypills.shop/]buy zyvox online[/url] [url=https://hydroxychloroquine.golf/]quineprox 750mg[/url]
RichardFaply · June 25, 2022 at 10:21 pm
[url=http://avodart.boutique/]avodart price in india[/url] [url=http://buypillsonline.shop/]minocycline 50 price[/url] [url=http://lipitor.store/]lipitor 40 mg generic price[/url] [url=http://domperidone.shop/]where can you buy motilium[/url] [url=http://buyglucophage.shop/]metformin 1000 tab[/url] [url=http://bactrim.agency/]purchase bactrim ds[/url] [url=http://trazodone.agency/]desyrel tablet 50 mg[/url]
EvaCounk · June 26, 2022 at 1:15 am
[url=https://malegra.shop/]malegra dxt without prescription[/url]
JosephMaict · June 26, 2022 at 3:55 am
[url=https://buynolvadex.shop/]purchase nolvadex[/url] [url=https://buyaugmentin.store/]where to buy amoxicillin pharmacy[/url] [url=https://priligy.shop/]dapoxetine tablet price[/url] [url=https://buytetracycline.shop/]sumycin over the counter[/url] [url=https://sertraline.shop/]price generic zoloft[/url] [url=https://cipro.agency/]ciprofloxacin 200 mg[/url]
PaulCounk · June 26, 2022 at 9:01 am
[url=http://suhagra.golf/]buy suhagra online[/url]
dressage.pl · June 26, 2022 at 9:35 am
https://cutt.ly/oTQzteY
EvaCounk · June 26, 2022 at 10:12 am
[url=http://buybactrim.shop/]bactrim tablets 400mg 80mg[/url]
szkolajezdziectwa.pl · June 26, 2022 at 11:28 am
https://tinyurl.com/hf4j2kyb
JoeCounk · June 26, 2022 at 2:11 pm
[url=https://bactrim.boutique/]bactrim uk[/url] [url=https://retinoa.shop/]retino 0.025 cream[/url] [url=https://diflucan.agency/]buy diflucan online no prescription[/url] [url=https://buybactrim.shop/]bactrim cheap[/url] [url=https://amoxicillinpill.com/]augmentin for sale[/url] [url=https://buytamoxifen.shop/]nolvadex online australia[/url] [url=https://strattera.shop/]strattera generic brand[/url]
TedCounk · June 26, 2022 at 5:36 pm
[url=https://prednisolone.cfd/]online pharmacy uk prednisolone[/url]
RichardFaply · June 26, 2022 at 8:10 pm
[url=https://tamoxifen.cfd/]where to purchase nolvadex online[/url] [url=https://suhagra.agency/]suhagra 100mg best price[/url] [url=https://cialisutabs.monster/]cheap cialis canada pharmacy[/url] [url=https://propranolol.golf/]innopran xl generic cost[/url] [url=https://finasteride.solutions/]finasteride coupon[/url] [url=https://lisinopril.company/]lisinopril generic price[/url]
MaryCounk · June 26, 2022 at 9:28 pm
[url=http://zoloft.golf/]zoloft online buy[/url] [url=http://flomax.cfd/]flomax otc canada[/url] [url=http://tadacip.agency/]where to buy tadacip[/url] [url=http://buyamoxil.shop/]generic augmentin 875 cost[/url] [url=http://amoxicillinpill.com/]amoxicillin 25mg[/url] [url=http://buyzoloft.store/]average price of zoloft[/url] [url=http://gabapentin.shop/]gabapentin generic brand[/url] [url=http://buytoradol.shop/]toradol for migraines[/url]
RobertFoold · June 27, 2022 at 1:30 am
[url=http://erectafil.guru/]erectafil 5 mg[/url]
Michaelemult · June 27, 2022 at 7:49 am
[url=https://ivermectinuw.monster/]stromectol medicine[/url]
TommyHepsy · June 27, 2022 at 9:12 am
[url=http://viagrahtabs.monster/]can you buy viagra online[/url]
Charlesaduse · June 27, 2022 at 12:14 pm
[url=https://valtrex.golf/]buy valtrex singapore[/url]
EvaCounk · June 27, 2022 at 1:26 pm
[url=http://albuterol.agency/]online pharmacy albuterol[/url]
Estebanguall · June 27, 2022 at 2:21 pm
[url=https://piroxicam.store/]feldene capsules 20 mg[/url]
KiaCounk · June 27, 2022 at 4:20 pm
[url=https://promethazine.shop/]buy phenergan 10mg online[/url]
WilliamWem · June 27, 2022 at 6:41 pm
[url=http://lopressor.store/]lopressor 25 mg cost[/url] [url=http://metformin.directory/]buy metformin online pharmacy[/url] [url=http://hydroxychloroquine.boutique/]plaquenil 400 mg daily[/url]
Estebanguall · June 27, 2022 at 7:25 pm
[url=https://ivermectingd.quest/]ivermectin price canada[/url]
UgoCounk · June 27, 2022 at 8:56 pm
[url=https://indocin.cfd/]indocin over the counter[/url]
MarvinZem · June 27, 2022 at 9:08 pm
[url=http://propecia.sale/]finasteride uk price[/url]
JoeCounk · June 28, 2022 at 1:00 am
[url=https://buytamoxifen.shop/]tamoxifen 20 mg 1mg[/url] [url=https://modafinil2022.com/]modafinil canada cost[/url] [url=https://buyclonidine.shop/]clonidine canada[/url] [url=https://cipro.email/]cipro 500 mg tablet[/url] [url=https://buytoradol.shop/]toradol pill 10mg[/url] [url=https://diflucan.agency/]diflucan without prescription 200mg[/url] [url=https://orlistat.store/]orlistat 120mg capsules[/url] [url=https://synthroid.agency/]synthroid prescription[/url]
here · June 28, 2022 at 1:15 am
sxlj fuh sygma lnas sow vfpdi xyjar
https://teqtosystem.com
Estebanguall · June 28, 2022 at 9:59 am
[url=https://zoloft.best/]zoloft rx discount[/url]
JasonCounk · June 28, 2022 at 2:01 pm
[url=https://prednisolone.cfd/]prednisolone 25 mg cost australia[/url]
MiclTek · June 28, 2022 at 3:40 pm
[url=http://suhagra.best/]suhagra 50 mg tablet[/url]
CarlCounk · June 28, 2022 at 8:00 pm
[url=http://clomid.boutique/]where to buy clomid in australia[/url]
UgoCounk · June 28, 2022 at 8:08 pm
[url=https://avodart5.com/]buy avodart canada[/url]
Estebanguall · June 28, 2022 at 10:14 pm
[url=https://viagrajtabs.monster/]100mg sildenafil price[/url]
CarlCounk · June 28, 2022 at 10:34 pm
[url=http://flomax.cfd/]flomax prescription[/url]
YonCounk · June 29, 2022 at 1:59 am
[url=https://diflucan.shop/]buy cheap diflucan online[/url]
MichaelDwego · June 29, 2022 at 2:19 am
[url=http://viagrahtabs.monster/]cheapest sildenafil india[/url]
MichaelGuabe · June 29, 2022 at 2:21 am
[url=https://propecia.sale/]price of propecia[/url]
MarvinZem · June 29, 2022 at 3:37 am
[url=http://viagrajtabs.monster/]viagra for female online[/url]
MiclTek · June 29, 2022 at 5:07 am
[url=http://zanaflex.guru/]tizanidine average cost[/url]
EyeCounk · June 29, 2022 at 6:33 am
[url=https://buypill.shop/]suprax online uk[/url] [url=https://buyventolin.store/]buying ventolin online[/url]
Estebanguall · June 29, 2022 at 7:47 am
[url=https://hydroxychloroquine.boutique/]hydroxychloroquine tab 200mg[/url]
RicIsose · June 29, 2022 at 10:20 am
[url=http://dutasteride.shop/]avodart 0.5 mg tab[/url] [url=http://ivermectinsv.monster/]cost of ivermectin[/url]
WilliamWem · June 29, 2022 at 10:45 am
[url=http://flomax.guru/]flomax online uk[/url] [url=http://buytadacip.store/]tadacip 40 mg[/url] [url=http://piroxicam.store/]feldene gel over the counter[/url] [url=http://orlistat.guru/]orlistat 120 mg price[/url] [url=http://albuterol.company/]buy albuterol australia[/url] [url=http://viagrajtabs.monster/]buy viagra without a script[/url]
RodneyTab · June 29, 2022 at 12:08 pm
[url=https://suhagra.agency/]suhagra 25 mg buy online india[/url]
Samuelraisk · June 29, 2022 at 12:09 pm
[url=https://buystrattera.shop/]cost of strattera without insurance[/url]
Davidhup · June 29, 2022 at 1:50 pm
[url=http://cialisutabs.monster/]where to buy cialis in usa[/url]
WimCounk · June 29, 2022 at 4:09 pm
[url=https://zanaflex.cfd/]order tizanidine[/url]
MichaelGuabe · June 29, 2022 at 5:56 pm
[url=https://glucophage.guru/]how much is metformin 1000 mg[/url]
RobertFoold · June 29, 2022 at 6:46 pm
[url=http://cialiswtabs.quest/]online cialis mastercard[/url]
JaneCounk · June 29, 2022 at 9:59 pm
[url=http://disulfiram.shop/]disulfiram rx[/url]
MiaCounk · June 29, 2022 at 10:45 pm
[url=http://avodart.email/]avodart for sale online[/url]
DenCounk · June 29, 2022 at 11:09 pm
[url=https://onlinepharmacy.agency/]cross border pharmacy canada[/url]
JasonCounk · June 30, 2022 at 12:30 am
[url=https://cipro.email/]ciprofloxacin cost uk[/url]
UgoCounk · June 30, 2022 at 3:21 am
[url=https://biaxin.store/]cost of biaxin 500 mg[/url]
AnnaCounk · June 30, 2022 at 6:03 am
[url=http://cipro.email/]buy cipro online paypal[/url]
WimCounk · June 30, 2022 at 6:42 am
[url=https://lexapro.store/]lexapro mexico[/url]
Michaeldrist · June 30, 2022 at 11:44 am
[url=http://albuterol.best/]albuterol mdi[/url]
ElwoodGon · June 30, 2022 at 4:22 pm
[url=http://glucophage.guru/]metformin 3000 mg[/url]
TedCounk · June 30, 2022 at 4:23 pm
[url=https://buyzoloft.store/]zoloft 500mg[/url]
SamCounk · June 30, 2022 at 4:56 pm
[url=http://buyacyclovir.store/]acyclovir rx[/url] [url=http://valtrex.agency/]buy valtrex canada[/url] [url=http://cephalexinmed.com/]cephalexin 500 mg tablets[/url] [url=http://clomid.boutique/]can you buy clomid in canada[/url] [url=http://promethazine.shop/]phenergan gel[/url] [url=http://cipro.email/]ciprofloxacin australia[/url]
UgoCounk · June 30, 2022 at 8:30 pm
[url=https://clonidine.agency/]purchase clonidine[/url]
DarrylSef · July 1, 2022 at 1:05 am
[url=http://albuterol.digital/]buy ventolin over the counter uk[/url] [url=http://ivermectinue.monster/]where to buy ivermectin pills[/url]
RicIsose · July 1, 2022 at 6:04 am
[url=http://buystrattera.shop/]generic atomoxetine[/url] [url=http://cialisutabs.monster/]tadalafil 40 mg daily[/url] [url=http://suhagra.agency/]suhagra tablet online[/url]
Edgarlor · July 1, 2022 at 6:10 am
[url=https://buytadacip.store/]tadacip pills 20 mg[/url]
CarlCounk · July 1, 2022 at 6:27 am
[url=http://clonidine.boutique/]clonidine for ptsd[/url]
JimCounk · July 1, 2022 at 6:41 am
[url=https://strattera.shop/]can you buy strattera online[/url]
AlanCounk · July 1, 2022 at 11:26 am
[url=http://metformin.boutique/]4000 mg metformin daily[/url] [url=http://buyventolin.store/]ventolin cost australia[/url]
SamCounk · July 1, 2022 at 11:37 am
[url=http://strattera.shop/]atomoxetine cost[/url] [url=http://vardenafil.boutique/]buy generic vardenafil[/url] [url=http://clonidine.boutique/]clonidine tablets 100mcg[/url] [url=http://buybactrim.shop/]bactrim 400 80 mg tablet[/url]
Davidhup · July 1, 2022 at 12:43 pm
[url=http://buyaugmentin.monster/]how to order amoxicillin without a prescription[/url]
NickCounk · July 1, 2022 at 2:25 pm
[url=http://buyacyclovir.store/]valacyclovir valtrex[/url]
Jameseloro · July 1, 2022 at 3:49 pm
[url=https://cialiswtabs.quest/]real cialis[/url] [url=https://vardenafiltabs.online/]buy levitra online paypal[/url]
ZakCounk · July 1, 2022 at 4:05 pm
[url=https://albendazole.shop/]albenza drug[/url] [url=https://buyalbuterol.quest/]albuterol 100[/url]
AmyCounk · July 1, 2022 at 5:35 pm
[url=http://strattera.shop/]strattera cap 25mg[/url]
MarkCounk · July 2, 2022 at 2:27 am
[url=http://clomid.boutique/]where can i buy clomid without a prescription[/url]
MiclTek · July 2, 2022 at 6:36 am
[url=http://vermox.golf/]vermox over the counter canada[/url]
AshCounk · July 2, 2022 at 7:32 am
[url=https://trazodone.golf/]trazodone brand name australia[/url] [url=https://tizanidine.store/]tizanidine caps[/url]
Curtisvibia · July 2, 2022 at 8:17 am
[url=http://propecia.sale/]buy propecia in india[/url]
MiaCounk · July 2, 2022 at 8:21 am
[url=http://tadacip.agency/]tadacip canada[/url]
JasonCounk · July 2, 2022 at 12:47 pm
[url=https://vermox.digital/]vermox 500mg price[/url]
RicIsose · July 2, 2022 at 4:08 pm
[url=https://diclofenac.cfd/]voltaren cream generic[/url] [url=https://buyalbuterol.shop/]where to buy albuterol tablets in australia[/url] [url=https://seroquel.digital/]seroquel blood pressure[/url] [url=https://buyclonidine.monster/]clonidine sleep[/url] [url=https://dapoxetine.guru/]dapoxetine purchase in india[/url] [url=https://viagrautabs.quest/]viagra usa pharmacy[/url] [url=https://ivermectindq.quest/]ivermectin 6 mg tablets[/url]
Charlesaduse · July 2, 2022 at 10:15 pm
[url=https://ivermectindq.quest/]ivermectin cost australia[/url]
TimothyThive · July 2, 2022 at 10:24 pm
[url=https://hydroxyzine.store/]atarax cost uk[/url]
Samuelraisk · July 2, 2022 at 10:50 pm
[url=http://trazodone.digital/]trazodone otc in usa[/url]
MaryCounk · July 3, 2022 at 5:11 am
[url=http://ventolin.company/]albuterol coupon[/url] [url=http://flagyl.shop/]flagyl 400 mg tablet[/url] [url=http://acyclovir.works/]where to buy acyclovir cream over the counter[/url]
Chester Costen · July 3, 2022 at 5:44 am
wise fat loss tips
Samuelraisk · July 3, 2022 at 1:21 pm
[url=http://seroquel.digital/]buy seroquel online canada[/url]
JasonCounk · July 3, 2022 at 2:51 pm
[url=https://finasteride.directory/]generic propecia[/url]
LisaCounk · July 3, 2022 at 3:40 pm
[url=http://accutane.boutique/]accutane pill[/url]
EyeCounk · July 3, 2022 at 5:34 pm
[url=https://strattera.guru/]strattera buy online no prescription[/url] [url=https://propecia.boutique/]online propecia canada[/url] [url=https://zoloft.sale/]zoloft generic tablet[/url] [url=https://isotretinoin.shop/]accutane best price[/url]
JudyCounk · July 3, 2022 at 7:15 pm
[url=http://amoxicillin.company/]augmentin 625mg cost[/url]
MichaelGuabe · July 3, 2022 at 9:21 pm
[url=https://allopurinol.digital/]allopurinol brand name[/url]
Jameseloro · July 3, 2022 at 11:54 pm
[url=http://atenolol.shop/]buy atenolol canada[/url] [url=http://buyflomax.shop/]flomax 4 mg price[/url] [url=http://dapoxetine.guru/]can you buy priligy in usa[/url] [url=http://cialis2022.online/]real cialis pills[/url] [url=http://cialisdtabs.monster/]tadalafil online 40mg[/url]
ZakCounk · July 4, 2022 at 12:05 am
[url=https://atomoxetine.cfd/]how much is strattera medication[/url] [url=https://augmentin.email/]amoxicillin 500 mg cost[/url] [url=https://gabapentin.works/]neurontin generic brand[/url] [url=https://advair.shop/]advair 500 mg[/url]
Thomaszenue · July 4, 2022 at 1:37 am
urine drug test result time https://quick-fix-urine.blogspot.com/2022/06/12-places-to-purchase-quick-fix.html cyvy
MichaelDwego · July 4, 2022 at 4:21 pm
[url=http://ivermectindq.quest/]ivermectin nz[/url]
KimCounk · July 4, 2022 at 5:38 pm
[url=http://zoloft.sale/]where can i get zoloft[/url]
JackCounk · July 4, 2022 at 9:15 pm
[url=http://isotretinoin.shop/]accutane prescription cost uk[/url]
Edgarlor · July 5, 2022 at 3:49 am
[url=https://zoloft.digital/]brand name zoloft coupon[/url]
BooCounk · July 5, 2022 at 3:55 am
[url=https://bactrim.cfd/]bactrim over the counter canada[/url]
MiaCounk · July 5, 2022 at 5:10 am
[url=http://finasteride.directory/]propecia cost singapore[/url]
DarrylSef · July 5, 2022 at 11:37 am
[url=http://buyclonidine.monster/]clonidine for blood pressure[/url] [url=http://hydroxychloroquine.company/]plaquenil 200 mg[/url] [url=http://cialisdtabs.monster/]brand cialis best price[/url] [url=http://ivermectindq.quest/]ivermectin tablets order[/url] [url=http://ivermectinxz.monster/]ivermectin antiviral[/url] [url=http://propranolol.best/]propranolol 80mg[/url] [url=http://buyavodart.monster/]avodart cheap[/url]
Michaeldrist · July 5, 2022 at 11:39 am
[url=http://cialisktabs.monster/]purchase tadalafil 5mg online[/url]
WilliamWem · July 5, 2022 at 8:02 pm
[url=http://seroquel.digital/]seroquel 50mg tab[/url] [url=http://tadacip.email/]tadacip 20 mg price in india[/url] [url=http://propranolol.agency/]propranolol otc drug[/url] [url=http://cialisdtabs.monster/]buy female cialis[/url] [url=http://allopurinol.best/]allopurinol cost canada[/url] [url=http://citalopramtabs.online/]celexa 10mg cost[/url] [url=http://hydroxychloroquine.company/]plaquenil generic brand[/url]
DarrylSef · July 5, 2022 at 8:59 pm
[url=http://inderal.digital/]propranolol how to get[/url] [url=http://hydrochlorothiazide.store/]hydrochlorothiazide average cost[/url] [url=http://levaquin.digital/]levaquin pack[/url] [url=http://orlistat.shop/]cheap orlistat pills[/url]
AshCounk · July 5, 2022 at 9:58 pm
[url=https://amitriptyline.store/]can you buy amitriptyline over the counter usa[/url] [url=https://vermox.cfd/]buy vermox 500mg[/url] [url=https://diflucan.boutique/]diflucan fluconazole[/url] [url=https://flomax.shop/]flomax online order[/url] [url=https://buyvaltrex.shop/]valtrex brand[/url]
DenCounk · July 5, 2022 at 10:07 pm
[url=https://gabapentin.works/]gabapentin cream[/url]
WimCounk · July 5, 2022 at 11:24 pm
[url=https://cipro.golf/]cipro 10 mg[/url]
MiclTek · July 6, 2022 at 1:10 am
[url=http://diclofenac.cfd/]voltaren generic tablets[/url]
TommyHepsy · July 6, 2022 at 3:18 am
[url=https://ivermectinbq.quest/]ivermectin brand[/url]
Estebanguall · July 6, 2022 at 6:05 am
[url=http://buyeffexor.shop/]effexor brand name cost[/url]
WilliamWem · July 6, 2022 at 8:36 am
[url=http://inderal.digital/]propranolol pills online[/url] [url=http://buysildalis.store/]sildalis india[/url] [url=http://buyclonidine.monster/]clonidine oral[/url] [url=http://viagrautabs.quest/]35 viagra[/url] [url=http://seroquel.digital/]200 seroquel[/url] [url=http://allopurinol.digital/]allopurinol 100mg cost[/url] [url=http://diclofenac.cfd/]voltaren price nz[/url] [url=http://retina.sale/]where can you buy tretinoin gel[/url]
Michaelemult · July 6, 2022 at 9:07 am
[url=http://trazodone.digital/]trazodone 250 mg[/url]
Charlesaduse · July 6, 2022 at 9:03 pm
[url=https://viagraztabs.monster/]viagra soft[/url]
AmyCounk · July 6, 2022 at 11:48 pm
[url=http://diflucan.solutions/]diflucan online uk[/url]
NickCounk · July 7, 2022 at 4:00 am
[url=https://ivermectinmj.monster/]ivermectin 1[/url]
KiaCounk · July 7, 2022 at 5:15 am
[url=https://arimidex.shop/]arimidex for sale usa[/url]
MiaCounk · July 7, 2022 at 5:57 am
[url=http://arimidex.shop/]buy arimidex cheap[/url]
RicIsose · July 7, 2022 at 6:13 am
[url=https://modafinil.works/]modafinil price india[/url] [url=https://hydroxychloroquine.company/]hydroxychloroquine virus[/url] [url=https://zoloft.digital/]zoloft[/url]
DarrylSef · July 7, 2022 at 12:36 pm
[url=http://retina.sale/]tretinoin 0.05 coupon[/url] [url=http://propranolol.best/]cost of propranolol 10 mg[/url] [url=http://viagraztabs.monster/]real viagra uk[/url] [url=http://levaquin.digital/]levaquin 750mg[/url] [url=http://inderal.digital/]drug propranolol[/url] [url=http://atenolol.shop/]order atenolol over the counter[/url] [url=http://buyalbuterol.shop/]ventolin tab 4mg[/url]
UgoCounk · July 7, 2022 at 1:40 pm
[url=https://duloxetine.store/]cymbalta without a prescription[/url]
EvaCounk · July 7, 2022 at 4:15 pm
[url=https://buycipro.store/]cipro for sale[/url]
YonCounk · July 7, 2022 at 5:28 pm
[url=https://cialisltabs.quest/]tadalafil 2.5 mg daily[/url]
WimCounk · July 7, 2022 at 9:46 pm
[url=http://ventolin.golf/]ventolin 500 mg[/url]
Samuelraisk · July 7, 2022 at 9:53 pm
[url=http://ivermectindq.quest/]ivermectin 1mg[/url]
RobertFoold · July 7, 2022 at 9:58 pm
[url=http://inderal.digital/]inderal[/url]
Charlesaduse · July 8, 2022 at 10:04 am
[url=https://hydroxychloroquine.company/]plaquenil 100 mg tablets[/url]
LisaCounk · July 8, 2022 at 12:22 pm
[url=http://nolvadex.digital/]nolvadex 100 mg[/url]
TimothyThive · July 8, 2022 at 2:18 pm
[url=https://erythromycin.shop/]erythromycin 250mg[/url]
IvyCounk · July 8, 2022 at 3:41 pm
[url=http://levaquin.store/]levaquin pack[/url] [url=http://fluconazole.cfd/]can you buy diflucan in mexico[/url] [url=http://buspar.store/]buspar 30 mg cost[/url]
JaneCounk · July 8, 2022 at 6:28 pm
[url=http://fildena.digital/]fildena 100 mg[/url]
Michaelemult · July 8, 2022 at 6:31 pm
[url=http://citalopramtabs.online/]can i buy citalopram over the counter in usa[/url]
MiaCounk · July 8, 2022 at 7:58 pm
[url=http://diflucan.solutions/]buy diflucan online india[/url]
SamCounk · July 8, 2022 at 8:48 pm
[url=https://gabapentin.works/]neurontin 600 mg price[/url] [url=https://diflucan.solutions/]diflucan 500 mg[/url] [url=https://robaxin.shop/]robaxin 300 mg[/url] [url=https://levaquin.store/]levaquin 500 mg levofloxacin antibiotics[/url] [url=https://albenza.best/]400 mg albendazole[/url] [url=https://acyclovir.works/]acyclovir 800[/url] [url=https://viagraqtabs.quest/]buy generic viagra united states[/url] [url=https://allopurinol.golf/]order allopurinol[/url]
MichaelGuabe · July 9, 2022 at 12:10 am
[url=https://propranolol.agency/]propranolol online australia[/url]
AlanCounk · July 9, 2022 at 1:03 am
[url=http://albuterol.works/]ventolin otc australia[/url] [url=http://vermox.digital/]can i buy vermox over the counter[/url] [url=http://gabapentin.works/]price of gabapentin 800 mg[/url] [url=http://budesonide.shop/]budesonide 3 mg price india[/url] [url=http://buycipro.store/]cipro 500 mg[/url] [url=http://propecia.boutique/]buy propecia cheap online uk[/url]
JasonCounk · July 9, 2022 at 3:48 am
[url=https://accutane.boutique/]accutane online pharmacy[/url]
RichardFaply · July 9, 2022 at 5:04 am
[url=https://cialisdtabs.monster/]generic for cialis[/url] [url=https://allopurinol.digital/]allopurinol cost uk[/url] [url=https://viagrahtab.quest/]sildenafil 200mg[/url]
Samuelraisk · July 9, 2022 at 10:07 am
[url=http://diclofenac.guru/]where can i buy diclofenac over the counter[/url]
Samuelraisk · July 9, 2022 at 3:03 pm
[url=https://cialisktab.monster/]cheap cialis 20mg online[/url]
RodneyTab · July 9, 2022 at 4:00 pm
[url=https://ivermectinny.monster/]ivermectin lotion[/url]
Jameseloro · July 9, 2022 at 8:28 pm
[url=https://cialisktab.monster/]cialis 200mg[/url] [url=https://vardenafil.best/]canada levitra online[/url] [url=https://clomid.solutions/]clomid prices[/url] [url=https://cephalexin.digital/]keflex for sale[/url] [url=https://synthroid.golf/]buy generic synthroid[/url]
TimothyThive · July 9, 2022 at 8:45 pm
[url=http://gabapentin.digital/]neurontin 300 mg capsule[/url]
Jameseloro · July 9, 2022 at 10:38 pm
[url=https://ivermectinjq.monster/]stromectol covid 19[/url] [url=https://metformin.guru/]glucophage online uk[/url] [url=https://lisinopril.solutions/]on line order lisinopril 20mg[/url] [url=https://synthroid.golf/]synthroid online purchase[/url] [url=https://albuterol.boutique/]athsma inhalers no prescription[/url]
RichardFaply · July 9, 2022 at 11:28 pm
[url=https://ivermectinqj.quest/]ivermectin 4 mg[/url] [url=https://viagradtabs.monster/]buy cheap viagra tablets[/url] [url=https://ampicillin.store/]ampicillin 50[/url] [url=https://antabuse.best/]antabuse 500 mg[/url] [url=https://ivermectincb.monster/]ivermectin antiviral[/url] [url=https://fildena.guru/]buy fildena 100mg[/url] [url=https://ivermectinny.monster/]ivermectin cost[/url] [url=https://gabapentin.digital/]neurontin cost in singapore[/url]
PaulCounk · July 9, 2022 at 11:28 pm
[url=https://zovirax.store/]acyclovir cream singapore[/url]
CarlCounk · July 9, 2022 at 11:55 pm
[url=http://buyindocin.shop/]indocin purchase[/url]
EyeCounk · July 10, 2022 at 4:16 am
[url=https://onlinepharmacy.guru/]order pharmacy online egypt[/url] [url=https://cialisutab.quest/]buy viagra cialis[/url] [url=https://viagrajtabs.quest/]viagra 50mg for sale[/url] [url=https://clopidogrel.shop/]plavix 20 mg[/url] [url=https://zoloft.company/]zoloft sertraline[/url] [url=https://stromectol.guru/]ivermectin drug[/url]
TommyHepsy · July 10, 2022 at 5:05 am
[url=https://viagradtabs.monster/]viagra online price[/url]
MiaCounk · July 10, 2022 at 11:34 am
[url=http://trazodone.guru/]trazodone 50mg prescription cost[/url]
puffco peak Pro · July 10, 2022 at 1:49 pm
puffco peak pro atomizer reddit how to remove puffco peak pro atomizer
ZakCounk · July 10, 2022 at 3:46 pm
[url=http://synthroid.sale/]price of synthroid in canada[/url] [url=http://bupropion.guru/]bupropion 415[/url] [url=http://buyclonidine.quest/]clonidine buy uk[/url] [url=http://glucophage.cfd/]metformin hcl[/url] [url=http://erectafil.email/]buy erectafil 20[/url] [url=http://accutane.agency/]best accutane brand[/url] [url=http://allopurinol.works/]allopurinol price uk[/url] [url=http://cephalexin.email/]keflex 250mg price[/url]
MarkCounk · July 10, 2022 at 5:16 pm
[url=https://buyindocin.shop/]indocin online[/url]
BooCounk · July 10, 2022 at 9:35 pm
[url=https://malegra.shop/]buy malegra 100[/url]
Edgarlor · July 10, 2022 at 10:49 pm
[url=https://vardenafil.best/]order levitra[/url]
KimCounk · July 10, 2022 at 10:52 pm
[url=https://viagrajtab.monster/]viagra over the counter price[/url]
TedCounk · July 10, 2022 at 11:24 pm
[url=http://allopurinoltab.online/]allopurinol 100mg mexico[/url]
ElwoodGon · July 11, 2022 at 12:08 am
[url=http://antabuse.best/]disulfiram tablets[/url]
Samuelraisk · July 11, 2022 at 3:29 am
[url=https://cialishtab.quest/]cialis for sale online[/url]
Charlesaduse · July 11, 2022 at 7:55 am
[url=http://ivermectinqj.quest/]stromectol over the counter[/url]
DarrylSef · July 11, 2022 at 11:58 am
[url=http://cialisktab.monster/]buy cialis online cheap[/url] [url=http://diflucan.best/]diflucan capsule 150mg[/url] [url=http://acyclovir.agency/]cost of zovirax tablets[/url] [url=http://proscar.golf/]finasteride pills[/url] [url=http://cephalexin.digital/]where to buy cephalexin in uk[/url]
WilliamWem · July 11, 2022 at 12:26 pm
[url=http://ampicillin.store/]ampicillin purchase[/url] [url=http://ivermectinny.monster/]ivermectin stromectol[/url] [url=http://antabuse.best/]antabuse tablets price south africa[/url] [url=http://proscar.golf/]proscar 5 mg[/url] [url=http://proscar.boutique/]proscar finasteride[/url]
JoeCounk · July 11, 2022 at 8:10 pm
[url=https://ivermectinsc.quest/]stromectol online pharmacy[/url] [url=https://modafinil.solutions/]provigil 100[/url] [url=https://ivermectinje.quest/]stromectol 3 mg[/url] [url=https://modafinil.best/]1200 mg modafinil[/url] [url=https://finasteridetab.online/]how to get propecia[/url] [url=https://accutane.agency/]accutane 40 mg online[/url] [url=https://estrace.store/]how much is estrace cost[/url]
MichaelGuabe · July 11, 2022 at 8:51 pm
[url=http://metformin.guru/]buy metformin 500mg[/url]
NickCounk · July 11, 2022 at 9:45 pm
[url=https://silagra.digital/]buy silagra online uk[/url]
RobertFoold · July 11, 2022 at 10:39 pm
[url=http://lipitor.guru/]buy lipitor in india[/url]
AshCounk · July 12, 2022 at 12:12 am
[url=https://colchicine100.com/]colchicine 6[/url] [url=https://bellatabs.com/]levitra india tablets[/url] [url=https://diflucan.email/]where to buy diflucan pills[/url]
Davidhup · July 12, 2022 at 3:44 am
[url=https://viagravtab.quest/]viagra voucher[/url]
https://Cutt.ly/ · July 12, 2022 at 11:08 am
https://tinyurl.com/yxaympc7
RodneyTab · July 12, 2022 at 2:50 pm
[url=https://proscar.boutique/]can i buy propecia online[/url]
PaulCounk · July 12, 2022 at 5:11 pm
[url=https://zofran.cfd/]zofran 75mg[/url]
Edgarlor · July 12, 2022 at 5:12 pm
[url=https://antabuse.best/]antabuse tablets in india[/url]
Jameseloro · July 12, 2022 at 5:13 pm
[url=https://diflucan.best/]cost of diflucan in india[/url] [url=https://buysynthroid.store/]buy synthroid 200 mcg[/url] [url=https://buycipro.monster/]buy ciprofloxacin[/url] [url=https://ivermectinny.monster/]order stromectol[/url]
AnnaCounk · July 12, 2022 at 6:26 pm
[url=https://erectafil.email/]erectafil 40[/url]
is.gd · July 12, 2022 at 11:20 pm
However, the bankruptcy of the insured with a “reimbursement” coverage doesn’t relieve the insurer.
Michaeldrist · July 13, 2022 at 12:26 am
[url=http://antabuse.best/]antabuse buy uk[/url]
RobertFoold · July 13, 2022 at 2:36 am
[url=http://vermox.agency/]vermox pharmacy[/url]
AnnaCounk · July 13, 2022 at 9:00 am
[url=https://hydroxychloroquine.solutions/]plaquenil tab 200mg[/url]
Davidhup · July 13, 2022 at 9:39 am
[url=https://viagrattab.monster/]how to buy viagra in usa[/url]
YonCounk · July 13, 2022 at 2:02 pm
[url=http://accutane.agency/]how to get accutane in india[/url]
Charlesaduse · July 14, 2022 at 12:53 am
[url=http://ivermectincb.monster/]ivermectin cream 1[/url]
JaneCounk · July 14, 2022 at 3:38 am
[url=http://zoloft.company/]zoloft price australia[/url]
LisaCounk · July 14, 2022 at 5:21 am
[url=https://tamoxifen.digital/]nolvadex order online uk[/url]
AshCounk · July 14, 2022 at 6:00 am
[url=https://singulairmontelukast.com/]singulair brand[/url] [url=https://baclofen.store/]baclofen cream 60 mg[/url] [url=https://duloxetine.store/]buy cymbalta 60 mg online[/url] [url=https://diflucan.golf/]diflucan buy nz[/url] [url=https://buyretina.store/]buy retin a online usa[/url] [url=https://txtadalafil.online/]tadalafil 2.5[/url] [url=https://dipyridamole.store/]dipyridamole 75 mg tablet[/url]
WimCounk · July 14, 2022 at 7:07 am
[url=http://diflucan.email/]where to get diflucan over the counter[/url]
MiclTek · July 14, 2022 at 7:20 am
[url=http://viagradtabs.monster/]25mg viagra[/url]
Michaelemult · July 14, 2022 at 4:55 pm
[url=https://albenza.guru/]albendazole online australia[/url]
Estebanguall · July 14, 2022 at 9:36 pm
[url=https://proscar.golf/]propecia for sale uk[/url]
RichardFaply · July 15, 2022 at 12:46 am
[url=https://ivermectincb.monster/]ivermectin 200[/url] [url=https://accutane.directory/]accutane uk prescription[/url] [url=https://ventolin.best/]buy albuterol online no prescription[/url] [url=https://viagrattab.monster/]buy viagra online best price[/url] [url=https://lisinopril.solutions/]lisinopril medication prescription[/url] [url=https://viagraxtabs.monster/]viagra pills cost in india[/url] [url=https://buycipro.monster/]buy ciprofloxacin 500mg uk[/url] [url=https://buycephalexin.store/]keflex 500 mg tablet cost[/url]
Michaeldrist · July 15, 2022 at 1:46 am
[url=http://accutane.directory/]accutane 30 mg coupon[/url]
JoeCounk · July 15, 2022 at 2:34 am
[url=https://onlinepharmacy.guru/]online pharmacy weight loss[/url] [url=https://erectafil.email/]erectafil 10 mg[/url] [url=https://acyclovir.guru/]zovirax buy uk[/url]
Michaelemult · July 15, 2022 at 4:58 am
[url=https://accutane.directory/]accutane generic canada[/url]
MiclTek · July 15, 2022 at 6:37 am
[url=http://antabuse.best/]disulfiram 500 mg pill[/url]
TeoCounk · July 15, 2022 at 8:02 am
[url=http://viagrajtab.monster/]buy viagra pills online[/url]
Estebanguall · July 15, 2022 at 9:20 am
[url=https://cialisdtabs.quest/]buy generic cialis fast shipping[/url]
MiaCounk · July 15, 2022 at 2:19 pm
[url=https://viagraqtab.quest/]sildenafil coupon[/url]
PaulCounk · July 15, 2022 at 7:59 pm
[url=https://tretinoin.guru/]buy retin a 05 online[/url]
DarrylSef · July 15, 2022 at 9:38 pm
[url=http://cipro.guru/]ciprofloxacin prescription[/url] [url=http://buycipro.guru/]ciprofloxacin where can i buy[/url] [url=http://furosemide.digital/]lasix 3170[/url] [url=http://antabuse.solutions/]antabuse online[/url] [url=http://chloroquine.works/]chloroquine uk[/url] [url=http://proscar.digital/]propecia costs canada[/url] [url=http://indocin.digital/]indocin 75 mg[/url] [url=http://synthroid.company/]synthroid 112 mcg coupon[/url]
AshCounk · July 16, 2022 at 2:14 am
[url=https://cipro.agency/]can you buy ciprofloxacin over the counter[/url] [url=https://sildenafil24.com/]generic viagra online canadian[/url] [url=https://levitragt.com/]levitra capsules[/url] [url=https://vermox500.com/]mebendazole[/url] [url=https://augmentin.cfd/]amoxicillin 500 mg without prescription[/url] [url=https://lisinopril1.com/]lisinopril tablets[/url] [url=https://mebendazole.store/]how much is vermox[/url]
AmyCounk · July 16, 2022 at 6:46 am
[url=https://orlistat.digital/]orlistat 60 mg price in india[/url]
IvyCounk · July 16, 2022 at 1:08 pm
[url=https://trimox.shop/]purchase augmentin[/url] [url=https://viagradtab.monster/]canada rx viagra[/url] [url=https://bupropion.boutique/]bupropion uk buy[/url] [url=https://buyerectafil.store/]erectafil 20 mg price[/url] [url=https://viagrastabs.quest/]viagra online no prescription canada[/url] [url=https://trazodone.company/]trazodone purchase[/url]
MichaelGuabe · July 16, 2022 at 3:36 pm
[url=http://tenormin.shop/]atenolol 100 mg tablet[/url]
RobertFoold · July 16, 2022 at 4:01 pm
[url=https://tretinoin.digital/]tretinoin rx coupon[/url]
MiclTek · July 16, 2022 at 8:34 pm
[url=http://ventolin2022.online/]generic combivent prices[/url]
SueCounk · July 16, 2022 at 10:01 pm
[url=https://malegra.works/]malegra dxt tablets[/url]
Michaelemult · July 16, 2022 at 10:38 pm
[url=https://proscar.digital/]proscar australia[/url]
ZakCounk · July 17, 2022 at 7:45 am
[url=http://buyvaltrex.digital/]buy valtrex tablets[/url] [url=http://diflucan.company/]diflucan otc[/url] [url=http://inderal.guru/]propranolol generic[/url] [url=http://albendazole.store/]albendazole for sale[/url]
MiaCounk · July 17, 2022 at 8:53 am
[url=https://cialisotab.quest/]rx tadalafil tablets 10 mg[/url]
JoeCounk · July 17, 2022 at 9:03 am
[url=https://cialisctab.monster/]order cialis without a prescription[/url] [url=https://wellbutrin.works/]zyban cost without insurance[/url]
NickCounk · July 17, 2022 at 9:13 am
[url=http://buyvaltrex.digital/]valtrex valacyclovir[/url]
Davidhup · July 17, 2022 at 11:34 am
[url=http://furosemide.guru/]lasix for sale[/url]
JaneCounk · July 17, 2022 at 3:59 pm
[url=https://inderal.guru/]order propranolol online uk[/url]
TommyHepsy · July 17, 2022 at 6:16 pm
[url=http://lanoxin.works/]0.125 mg digoxin[/url]
UgoCounk · July 17, 2022 at 10:42 pm
[url=http://avodart.boutique/]how can i get avodart[/url]
DenCounk · July 17, 2022 at 11:28 pm
[url=http://celexa.boutique/]citalopram 200 mg[/url]
JimCounk · July 18, 2022 at 1:54 am
[url=https://viagrabtabs.monster/]viagra generic from india[/url]
MichaelGuabe · July 18, 2022 at 2:36 am
[url=http://seroquel.works/]buy seroquel cheap[/url]
JudyCounk · July 18, 2022 at 9:26 am
[url=https://tamoxifen.boutique/]tamoxifen buy online[/url]
RodneyTab · July 18, 2022 at 1:34 pm
[url=https://buspar.guru/]buspar 30 mg tablet[/url]
SueCounk · July 18, 2022 at 2:50 pm
[url=https://buspar.works/]buspar price uk[/url]
Davidhup · July 18, 2022 at 3:16 pm
[url=http://ventolin2022.online/]proventil inhaler for sale[/url]
Michaeldrist · July 18, 2022 at 5:47 pm
[url=http://indocin.digital/]indocin 25 mg capsules[/url]
Michaeldrist · July 18, 2022 at 9:25 pm
[url=http://buybactrim.boutique/]bactrim prescription[/url]
AshCounk · July 19, 2022 at 12:33 am
[url=https://duloxetine.store/]purchase cymbalta online[/url] [url=https://vardenafil.golf/]levitra generic coupon[/url] [url=https://avodart.boutique/]order avodart[/url] [url=https://cholesterolrem.com/]crestor 5 mg tablet cost[/url] [url=https://tadacip.cfd/]buy tadacip[/url] [url=https://antabuse.golf/]antabuse prices[/url]
SueCounk · July 19, 2022 at 3:25 am
[url=https://valtrex.company/]buy valtrex online usa[/url]
Estebanguall · July 19, 2022 at 6:12 am
[url=https://furosemide.digital/]lasix 20 mg tabs[/url]
TeoCounk · July 19, 2022 at 9:16 am
[url=http://diflucan.company/]diflucan without a prescription[/url]
EyeCounk · July 19, 2022 at 9:19 am
[url=http://buybactrim.digital/]where can i buy bactrim over the counter[/url] [url=http://tetracycline.boutique/]tetracycline generic brand[/url] [url=http://bupropion.boutique/]how to get wellbutrin online[/url]
MichaelDwego · July 19, 2022 at 9:36 am
[url=https://cialisetab.monster/]tadalafil over the counter[/url]
Michaelemult · July 19, 2022 at 12:02 pm
[url=https://cialisdtabs.quest/]prescription cialis from canada[/url]
MichaelDwego · July 19, 2022 at 12:49 pm
[url=https://zoloft.solutions/]can you buy zoloft in mexico[/url]
RodneyTab · July 19, 2022 at 3:35 pm
[url=https://buycipro.guru/]cipro xr[/url]
CarlCounk · July 19, 2022 at 8:02 pm
[url=https://prozac.boutique/]how can i get prozac[/url]
Jameseloro · July 19, 2022 at 8:45 pm
[url=https://buybactrim.boutique/]bactrim 960 mg[/url] [url=https://lanoxin.works/]digoxin 125[/url]
Davidhup · July 19, 2022 at 10:24 pm
[url=http://proscar.digital/]propecia brand coupon[/url]
WimCounk · July 19, 2022 at 10:53 pm
[url=http://amitriptiline.com/]amitriptyline 25 mg tablet cost[/url]
MiclTek · July 20, 2022 at 1:18 am
[url=http://viagrantabs.monster/]purchase viagra in uk[/url]
AshCounk · July 20, 2022 at 5:03 am
[url=https://tadacip.golf/]generic tadacip[/url] [url=https://modafinilprovgl.com/]provigil buy europe[/url] [url=https://busparone.com/]buspar no prescription[/url] [url=https://buyalbuterol.store/]1.25 albuterol[/url] [url=https://buyacyclovir.store/]where can i get zovirax cream[/url] [url=https://abilify.quest/]abilify prescription cost[/url]
DavisMug · July 20, 2022 at 6:07 am
[url=https://cialisdtabs.quest/]buy cialis free shipping[/url]
YonCounk · July 20, 2022 at 7:11 am
[url=http://viagraqtab.quest/]how to get viagra online in usa[/url]
UgoCounk · July 20, 2022 at 8:00 am
[url=http://singulair10.com/]average cost of singulair[/url]
AlanCounk · July 20, 2022 at 8:14 am
[url=https://viagramtabs.quest/]viagra pills online india[/url] [url=https://buspar.works/]buspar costs[/url] [url=https://celexa.boutique/]citalopram 40 mg tab[/url]
https://tinyurl.com · July 20, 2022 at 8:26 am
We’ll clarify all your protection choices and discover reductions that can assist you save.
SamCounk · July 20, 2022 at 10:21 am
[url=http://cialishtabs.quest/]generic cialis cost[/url] [url=http://cialisftabs.quest/]tadalafil tablets 20mg[/url] [url=http://hydrochlorothiazide.digital/]price hydrochlorothiazide 25 mg[/url] [url=http://viagraqtab.quest/]how to buy viagra online safely in india[/url] [url=http://buspar.works/]15 mg buspar[/url] [url=http://diflucan.company/]diflucan tablets[/url] [url=http://lyrica.directory/]lyrica online uk[/url] [url=http://albenza.digital/]where to buy albendazole[/url]
JimCounk · July 20, 2022 at 11:46 am
[url=https://methocarbamol.shop/]robaxin 150 mg[/url]
Jameseloro · July 20, 2022 at 12:00 pm
[url=https://tenormin.shop/]buy atenolol 100mg[/url] [url=https://toradol.boutique/]60 mg toradol[/url] [url=https://cialisetab.monster/]cialis france[/url] [url=https://atarax.works/]atarax pills[/url] [url=https://onlinedrugstore.works/]indian pharmacies safe[/url] [url=https://viagrantabs.monster/]viagra 25 mg order[/url] [url=https://buybactrim.boutique/]bactrim generic price[/url]
TimothyThive · July 20, 2022 at 12:11 pm
[url=http://antabuse.solutions/]disulfiram 200 mg[/url]
RobertFoold · July 20, 2022 at 1:34 pm
[url=https://cialisjtabs.quest/]buy cialis in nz[/url]
WilliamWem · July 20, 2022 at 2:17 pm
[url=https://cialisdtabs.quest/]india generic cialis[/url] [url=https://propranolol.directory/]inderal cost[/url] [url=https://viagraktabs.quest/]generic viagra from mexico[/url]
EvaCounk · July 20, 2022 at 6:39 pm
[url=http://diflucan.company/]diflucan without get a prescription online[/url]
KiaCounk · July 20, 2022 at 9:13 pm
[url=http://viagramtabs.quest/]sildenafil 5mg price[/url]
Michaeldrist · July 20, 2022 at 9:37 pm
[url=http://tenormin.shop/]cost of atenolol 50 mg[/url]
IvyCounk · July 20, 2022 at 9:56 pm
[url=https://canadianpharmacy.sale/]rx pharmacy no prescription[/url] [url=https://malegra.works/]malegra 50 mg[/url] [url=https://viagrastabs.quest/]200 mg viagra india[/url] [url=https://paxil.works/]buy paroxetine tablets[/url] [url=https://neurontin.guru/]gabapentin 5027[/url]
CarlCounk · July 21, 2022 at 12:23 am
[url=https://trazodone.directory/]buying trazodone online[/url]
RichardFaply · July 21, 2022 at 12:33 am
[url=https://viagrabtab.quest/]sildenafil 10 mg[/url] [url=https://accutane.company/]accutane pills for sale[/url] [url=https://furosemide.digital/]lasix tablet[/url]
JosephMaict · July 21, 2022 at 6:23 am
[url=http://onlinedrugstore.works/]reputable online pharmacy[/url] [url=http://sildalis.digital/]generic sildalis[/url] [url=http://ventolin2022.online/]buy ventolin tablets online[/url] [url=http://toradol.boutique/]toradol 150 mg[/url] [url=http://neurontin.digital/]gabapentin 30[/url] [url=http://amitriptyline.works/]elavil for anxiety[/url]
Davidhup · July 21, 2022 at 10:51 am
[url=http://viagrantabs.monster/]how to buy real viagra[/url]
Michaeldrist · July 21, 2022 at 11:27 am
[url=http://buspar.guru/]buspar price south africa[/url]
Edgarlor · July 21, 2022 at 1:15 pm
[url=https://clindamycin.boutique/]cleocin 2 cream over the counter[/url]
Michaelemult · July 21, 2022 at 2:43 pm
[url=https://tizanidine.digital/]zanaflex 4mg price in usa[/url]
AmyCounk · July 21, 2022 at 3:25 pm
[url=https://albenza.digital/]buy albendazole without prescription[/url]
MiaCounk · July 21, 2022 at 3:58 pm
[url=https://buyvardenafil.digital/]levitra online australia[/url]
Curtisvibia · July 21, 2022 at 9:24 pm
[url=https://cialisptab.quest/]buy cialis online cheap india[/url]
NickCounk · July 21, 2022 at 10:21 pm
[url=https://strattera.sale/]strattera 18 mg buy online[/url]
Jameseloro · July 21, 2022 at 11:42 pm
[url=http://ampicillin.guru/]ampicillin tablets india[/url] [url=http://buyprednisolone.works/]prednisolone 5mg[/url] [url=http://medrol.boutique/]medrol medication generic[/url] [url=http://vermox.directory/]vermox tablets price[/url]
RicIsose · July 22, 2022 at 4:19 am
[url=http://ampicillin.guru/]ampicillin 1000 mg[/url] [url=http://vermox.guru/]vermox india[/url]
JoeCounk · July 22, 2022 at 5:06 am
[url=http://antabuse.sale/]disulfiram 200mg[/url] [url=http://onlinedrugstore.sale/]legal online pharmacies in the us[/url] [url=http://cialisotabs.monster/]tadalafil cost uk[/url] [url=http://abilify.works/]cheap abilify[/url] [url=http://valtrextabs.online/]valtrex acyclovir[/url] [url=http://erectafil.digital/]erectafil 20 mg price[/url]
BooCounk · July 22, 2022 at 7:14 am
[url=http://buypillsonline.shop/]buy minocycline online uk[/url]
RodneyTab · July 22, 2022 at 8:51 am
[url=https://buyprednisolone.works/]prednisolone tablets price[/url]
Curtisvibia · July 22, 2022 at 9:04 am
[url=https://cialisftabs.monster/]best price for tadalafil tablets[/url]
WimCounk · July 22, 2022 at 3:30 pm
[url=http://yasmindrug.com/]generic yasmin[/url]
Michaeldrist · July 22, 2022 at 5:46 pm
[url=http://cialisutabs.quest/]cialis drug prices[/url]
Charlesaduse · July 23, 2022 at 12:04 am
[url=https://buyfinasteride.boutique/]buy propecia 5mg[/url]
WilliamWem · July 23, 2022 at 5:18 am
[url=https://cialisftabs.monster/]generic cialis 5mg online[/url] [url=https://chloroquine.guru/]delagil[/url] [url=https://zestoretic.boutique/]zestoretic 20 25[/url] [url=https://vermox.guru/]vermox uk buy online[/url] [url=https://cialisptab.quest/]cialis online legal[/url] [url=https://budesonide.store/]budesonide price[/url]
MiclTek · July 23, 2022 at 7:25 am
[url=http://bactrim.guru/]bactrim ds 800-160[/url]
Michaeldrist · July 23, 2022 at 8:17 am
[url=http://cialisstab.quest/]cialis price usa[/url]
YonCounk · July 23, 2022 at 10:51 am
[url=https://viagraxtabs.quest/]generic viagra india[/url]
DarrylSef · July 23, 2022 at 12:20 pm
[url=http://buyprednisolone.works/]prednisolone 1[/url] [url=http://drugstore.golf/]southern pharmacy[/url] [url=http://colchicine.digital/]colchicine over the counter australia[/url] [url=http://cialisotab.monster/]cialis generic pills[/url] [url=http://buysuhagra.shop/]suhagra 100 mg[/url]
JudyCounk · July 23, 2022 at 12:30 pm
[url=https://cialisotabs.monster/]cialis online fast shipping[/url]
Davidhup · July 23, 2022 at 1:25 pm
[url=http://triamterene.shop/]triamterene price[/url]
RicIsose · July 23, 2022 at 2:59 pm
[url=http://buybuspar.works/]buspar 10mg cost[/url] [url=http://erectafil.boutique/]buy erectafil[/url] [url=http://buysuhagra.shop/]suhagra 50 mg buy online india[/url]
Estebanguall · July 23, 2022 at 3:48 pm
[url=http://viagraltabs.monster/]sildenafil online australia[/url]
LisaCounk · July 23, 2022 at 7:34 pm
[url=https://proscar.store/]propecia lowest price[/url]
TedCounk · July 23, 2022 at 11:18 pm
[url=https://buymodafinil.works/]modafinil india cost[/url]
AlanCounk · July 23, 2022 at 11:54 pm
[url=https://abilify.works/]abilify prescription cost[/url] [url=https://viagrattabs.quest/]sildenafil 25 mg india[/url] [url=https://viagravtabs.quest/]best viagra pills uk[/url] [url=https://prednisolone.works/]prednisolone 5 mg tablet[/url] [url=https://atomoxetine.shop/]strattera 80 mg capsule[/url] [url=https://cialisotabs.monster/]buy generic cialis canada[/url] [url=https://buylisinopril.boutique/]lisinopril cost canada[/url] [url=https://tenormin.boutique/]how to purchase atenolol without prescription[/url]
RichardFaply · July 24, 2022 at 4:04 am
[url=https://buysuhagra.shop/]suhagra 50 online india[/url] [url=https://cialismtabs.quest/]buy cialis uk[/url] [url=https://cafergot.guru/]cafergot australia[/url] [url=https://tenormin.works/]atenolol 25 mg buy online[/url] [url=https://erectafil.boutique/]erectafil 20 mg[/url]
MichaelGuabe · July 24, 2022 at 6:32 am
[url=https://amitriptyline.boutique/]amitriptyline 75 mg[/url]
https://bit.ly/ · July 24, 2022 at 10:41 am
https://cztery-kopyta.pl
Charlesaduse · July 24, 2022 at 2:13 pm
[url=https://prednisolone.digital/]prednisolone uk[/url]
Edgarlor · July 24, 2022 at 6:04 pm
[url=https://elavil.boutique/]how much is amitriptyline 100 mg[/url]
Michaeldrist · July 24, 2022 at 9:17 pm
[url=http://budesonide.store/]budesonide from canada[/url]
WilliamWem · July 24, 2022 at 9:17 pm
[url=https://lasixtab.online/]furosemide 20 mg sales[/url] [url=https://budesonide.store/]budesonide capsules[/url] [url=https://cialisotab.monster/]can you buy cialis online from canada[/url] [url=https://buylasix.guru/]over the counter lasix[/url] [url=https://citalopram.guru/]80 mg celexa daily[/url] [url=https://cialisptab.quest/]tadalafil best price[/url]
UgoCounk · July 24, 2022 at 11:24 pm
[url=https://erectafil.agency/]erectafil 2.5[/url]
TedCounk · July 25, 2022 at 4:02 am
[url=https://dexamethasone.digital/]dexamethasone drug[/url]
KimCounk · July 25, 2022 at 5:14 am
[url=http://amoxil.digital/]buy generic amoxil no prescription[/url]
KiaCounk · July 25, 2022 at 8:50 am
[url=http://cialisttabs.quest/]cialis price generic[/url]
TommyHepsy · July 25, 2022 at 9:09 am
[url=http://cialisgtabs.quest/]tadalafil discount[/url]
IvyCounk · July 25, 2022 at 9:42 am
[url=http://viagrartab.monster/]viagra canada drugstore[/url] [url=http://buylanoxin.boutique/]lanoxin 50 mg[/url] [url=http://cialisotabs.monster/]cialis 20 mg lowest price[/url] [url=http://erectafil.digital/]erectafil online[/url] [url=http://buysildenafil.digital/]viagra coupon online[/url] [url=http://inderal.shop/]cost of propranolol[/url] [url=http://buylisinopril.boutique/]10mg generic 10mg lisinopril[/url] [url=http://zithromax.digital/]azithromycin online australia[/url]
JosephMaict · July 25, 2022 at 10:40 am
[url=https://proscar.agency/]buy propecia from india[/url] [url=https://buybuspar.works/]buspar australia[/url] [url=https://drugstore.golf/]indian pharmacies safe[/url] [url=https://vermox.guru/]vermox tablets[/url] [url=https://cialisftabs.monster/]tadalafil india paypal[/url] [url=https://advair.works/]advair generic over the counter[/url] [url=https://cialismtabs.quest/]cialis purchase[/url]
ZakCounk · July 25, 2022 at 11:55 am
[url=https://cialisotabs.monster/]cheap generic cialis canada[/url] [url=https://toradol.works/]where can you buy toradol[/url] [url=https://viagraatabs.quest/]how much is viagra online[/url] [url=https://tetracycline.guru/]terramycin over the counter[/url] [url=https://buysildenafil.digital/]viagra tablet cost in india[/url] [url=https://clopidogrel.boutique/]plavix 75 mg tablets[/url] [url=https://inderal.shop/]propranolol 20[/url]
PaulCounk · July 25, 2022 at 2:54 pm
[url=https://viagraptabs.monster/]viagra uk order[/url]
JackCounk · July 25, 2022 at 10:21 pm
[url=http://cialisztabs.monster/]best tadalafil in india[/url]
MichaelDwego · July 26, 2022 at 12:28 am
[url=https://cialisstab.quest/]female cialis online[/url]
WimCounk · July 26, 2022 at 1:20 am
[url=http://motilium.cfd/]motilium uk pharmacy[/url]
MarvinZem · July 26, 2022 at 2:21 am
[url=http://ampicillin.guru/]ampicillin over the counter[/url]
AnnaCounk · July 26, 2022 at 8:19 am
[url=https://buypropecia.boutique/]propecia cheapest no prescription[/url]
Estebanguall · July 26, 2022 at 9:26 am
[url=http://lasixtab.online/]furosemide 20 mg price[/url]
KiaCounk · July 26, 2022 at 11:56 am
[url=http://acyclovir.best/]order zovirax online using mastercard[/url]
bit.ly · July 26, 2022 at 1:41 pm
Bike insurance policy quantity is a singular number which is of eight to
10 digits supplied by the insurance firm.
DavisMug · July 26, 2022 at 10:18 pm
[url=https://buyprednisolone.works/]prednisolone over the counter uk[/url]
DenCounk · July 27, 2022 at 4:03 am
[url=http://onlinedrugstore.sale/]legitimate canadian pharmacies[/url]
MiclTek · July 27, 2022 at 5:25 am
[url=http://budesonide.store/]budesonide discount[/url]
MarkCounk · July 27, 2022 at 6:45 am
[url=https://antabuse.sale/]disulfiram 500 mg tablets online[/url]
Curtisvibia · July 27, 2022 at 8:56 am
[url=https://bupropion.works/]wellbutrin without script[/url]
RobertFoold · July 27, 2022 at 11:08 am
[url=http://prozac.guru/]buy cheap fluoxetine[/url]
MarvinZem · July 27, 2022 at 11:32 am
[url=http://albuterola.online/]ventolin 100mcg price[/url]
JasonCounk · July 27, 2022 at 12:06 pm
[url=https://lisinoprilx.online/]buy zestoretic[/url]
DarrylSef · July 27, 2022 at 12:39 pm
[url=http://cialisgtabs.quest/]best price for cialis 10mg[/url] [url=http://chloroquine.guru/]chloroquine 150[/url] [url=http://buyprozac.works/]can i buy prozac in mexico[/url] [url=http://cialisstabs.quest/]where to buy tadalafil online[/url] [url=http://cafergot.guru/]generic cafergot[/url]
BooCounk · July 27, 2022 at 1:27 pm
[url=http://finpecia.monster/]finpecia 1 mg[/url]
SueCounk · July 27, 2022 at 2:31 pm
[url=http://allopurinol.solutions/]allopurinol canadian pharmacy[/url]
EyeCounk · July 27, 2022 at 5:33 pm
[url=https://cytotec.guru/]cheap misoprostol[/url] [url=https://strattera.digital/]strattera canada[/url] [url=https://viagraetabs.monster/]viagra buy india[/url] [url=https://buylanoxin.digital/]digoxin 0.125 mg tablet[/url] [url=https://buymetformin.works/]metformin hcl 1000 mg[/url]
Estebanguall · July 27, 2022 at 7:42 pm
[url=https://buynolvadex.works/]buying nolvadex online[/url]
MiclTek · July 28, 2022 at 2:16 am
[url=http://buysilagra.shop/]silagra 100 mg[/url]
Jameseloro · July 28, 2022 at 4:00 am
[url=https://buysilagra.shop/]silagra 100 online[/url] [url=https://arimidex.works/]how to get arimidex[/url] [url=https://escitalopram.shop/]lexapro 10 mg tablet price[/url] [url=https://cialisutab.monster/]generic tadalafil safe[/url] [url=https://buyazithromycin.works/]where can i order zithromax[/url] [url=https://viagraatabs.monster/]buy sildenafil pills[/url]
AshCounk · July 28, 2022 at 7:24 am
[url=https://buyfildena.shop/]fildena 150 for sale[/url] [url=https://indocin.shop/]where buy indocin indomethacin[/url]
AnnaCounk · July 28, 2022 at 2:46 pm
[url=http://advair.boutique/]advair diskus from mexico[/url]
MaryCounk · July 28, 2022 at 10:37 pm
[url=https://azithromycin.works/]azithromycin brand name uk[/url] [url=https://buyantabuse.digital/]antabuse for sale online[/url]
JasonCounk · July 29, 2022 at 2:28 am
[url=https://dexamethasone.guru/]dexamethasone online pharmacy[/url]
is.gd · July 29, 2022 at 9:10 am
While the minimal entry age to buy a term insurance plan is eighteen years, the utmost entry age is sixty five years.
TommyHepsy · July 29, 2022 at 10:07 am
[url=http://mebendazole.shop/]vermox 100mg tablets[/url]
Davidhup · July 29, 2022 at 12:31 pm
[url=http://buycelexa.guru/]celexa 120 mg[/url]
TimothyThive · July 29, 2022 at 8:10 pm
[url=https://buymodafinil.digital/]cheap modafinil[/url]
JackCounk · July 29, 2022 at 9:22 pm
[url=http://viagraetabs.monster/]online pharmacy viagra australia[/url]
JudyCounk · July 29, 2022 at 11:51 pm
[url=https://phenergan.guru/]phenergan cost[/url]
RodneyTab · July 30, 2022 at 2:17 am
[url=https://canadianpharmacy.works/]cialis canada online pharmacy[/url]
Charlesaduse · July 30, 2022 at 2:38 am
[url=https://proscar.guru/]proscar 5mg uk[/url]
JosephMaict · July 30, 2022 at 5:59 am
[url=https://robaxin.store/]robaxin cost uk[/url] [url=https://zanaflex.store/]tizanidine 2mg cost[/url] [url=https://viagraatabs.monster/]where can you buy real generic viagra[/url] [url=https://paxil.digital/]paroxetine 20 mg[/url] [url=https://dapoxetine.boutique/]dapoxetine 60 mg buy online in india[/url] [url=https://buypropranolol.monster/]propranolol tablets[/url] [url=https://elavil.works/]buy amitriptyline 10mg online uk[/url] [url=https://chloroquine.digital/]aralen tablets[/url]
MarvinZem · July 30, 2022 at 9:25 am
[url=http://buylisinopril.works/]lisinopril 10 mg tablet[/url]
MaryCounk · July 30, 2022 at 3:18 pm
[url=https://cytotec.works/]where can you buy cytotec[/url] [url=https://tretinoin.sale/]tretinoin cream where to buy online[/url] [url=https://lexapro.digital/]lexapro 5mg[/url] [url=https://tadacip.digital/]tadacip 10 mg price[/url] [url=https://buyantabuse.digital/]antabuse 250 mg[/url] [url=https://buyclomid.digital/]buy clomid nz[/url] [url=https://buspar.digital/]buspar online uk[/url] [url=https://strattera.digital/]atomoxetine strattera[/url]
SueCounk · July 30, 2022 at 11:37 pm
[url=http://colchicine.guru/]can you buy colchicine over the counter[/url]
Ellyn Blomstrom · July 31, 2022 at 1:03 am
The best residential vpn services are here: https://www.proxies.tv/cart.php?gid=2
YonCounk · July 31, 2022 at 8:04 am
[url=https://propranolol.works/]propranolol 20 mg tablet price[/url]
RicIsose · July 31, 2022 at 9:49 am
[url=http://canadianpharmacy.works/]cost less pharmacy[/url] [url=http://buyviagra.boutique/]buy viagra discount[/url] [url=http://cleocin.boutique/]2 clindamycin[/url] [url=http://buycelexa.guru/]buy citalopram 40mg tablets[/url] [url=http://robaxin.store/]robaxin cost uk[/url]
MichaelDwego · July 31, 2022 at 10:34 am
[url=http://cafergot.digital/]cafergot medication[/url]
RichardFaply · July 31, 2022 at 12:59 pm
[url=https://buyventolin.works/]combivent best price[/url] [url=https://buycelexa.guru/]celexa discount[/url] [url=https://viagraytab.quest/]viagra 50mg price[/url] [url=https://antabuse.guru/]buy antabuse without prescription[/url] [url=https://buycialis.guru/]generic tadalafil 20 mg price[/url]
ZakCounk · July 31, 2022 at 2:59 pm
[url=https://zyban.boutique/]buy zyban online uk[/url] [url=https://lexapro.digital/]lexapro tablets[/url] [url=https://lanoxin.digital/]generic for lanoxin[/url] [url=https://buyvermox.monster/]vermox 500g[/url]
Edgarlor · July 31, 2022 at 5:12 pm
[url=https://cephalexin.guru/]keflex capsule price[/url]
JoeCounk · July 31, 2022 at 5:30 pm
[url=http://furosemide.store/]order furosemide online[/url] [url=http://cymbalta.boutique/]240 mg cymbalta[/url] [url=http://lanoxin.guru/]lanoxin 0.25 price[/url] [url=http://lisinoprilx.online/]buy lisinopril online no prescription india[/url] [url=http://viagraytab.monster/]sildenafil 20 coupon[/url] [url=http://buysynthroid.works/]synthroid 15mcg[/url]
Davidhup · August 1, 2022 at 3:00 am
[url=http://paxil.digital/]paroxetine 20mg order[/url]
AnnaCounk · August 1, 2022 at 4:32 am
[url=http://buspar.digital/]5mg buspar[/url]
Michaelemult · August 1, 2022 at 6:26 am
[url=https://lanoxin.boutique/]digoxin brand name canada[/url]
PaulCounk · August 1, 2022 at 5:50 pm
[url=https://fildenatabs.online/]fildena for sale[/url]
Michaelemult · August 1, 2022 at 6:34 pm
[url=https://viagraetab.monster/]how much is viagra generic[/url]
Estebanguall · August 1, 2022 at 7:03 pm
[url=https://canadianpharmacy.works/]canadian pharmacy world[/url]
TommyHepsy · August 1, 2022 at 11:48 pm
[url=http://antabuse.guru/]disulfiram over the counter[/url]
SamCounk · August 2, 2022 at 5:02 am
[url=http://buyvermox.monster/]vermox 500mg uk[/url] [url=http://cialisftab.monster/]price of generic cialis[/url] [url=http://allopurinol.company/]allopurinol canadian pharmacy[/url] [url=http://azithromycin.works/]zithromax over the counter canada[/url] [url=http://lexapro.guru/]lexapro cost canada[/url] [url=http://lanoxin.guru/]digoxin tab 0.125 mg[/url] [url=http://allopurinol.solutions/]allopurinol 135[/url]
LisaCounk · August 2, 2022 at 6:04 am
[url=https://buylanoxin.digital/]lanoxin discount[/url]
hpp-a.pl · August 2, 2022 at 6:28 am
https://tinyurl.com/n9eja6ud
JaneCounk · August 2, 2022 at 6:45 am
[url=http://buydiclofenac.works/]diclofenac 2.5 mg[/url]
JosephMaict · August 2, 2022 at 7:50 am
[url=https://viagrartab.quest/]sildenafil citrate uk[/url] [url=https://viagraitabs.quest/]viagra 20 mg cost[/url] [url=https://zanaflex.store/]tizanidine 2 mg medication[/url] [url=https://buyzithromax.works/]zithromax 1000 mg online[/url] [url=https://celexa.works/]celexa generic brand[/url] [url=https://dapoxetine.boutique/]generic super avana[/url]
DarrylSef · August 2, 2022 at 11:14 am
[url=http://buyamoxicillin.guru/]augmentin over the counter usa[/url] [url=http://buycialis.works/]cialis pill price in india[/url] [url=http://phenergan.digital/]otc phenergan medicine[/url] [url=http://tizanidine.guru/]1 mg tizanidine[/url] [url=http://pharmacyonline.works/]express scripts com pharmacies[/url] [url=http://buyadvair.digital/]buy advair diskus cheap[/url] [url=http://tetracycline.digital/]where to get tetracycline[/url] [url=http://buyprozac.guru/]fluoxetine price australia[/url]
RodneyTab · August 2, 2022 at 12:02 pm
[url=https://antabuse.company/]antabuse 200mg[/url]
MiclTek · August 2, 2022 at 3:36 pm
[url=http://buyadvair.digital/]best advair price[/url]
RicIsose · August 2, 2022 at 11:30 pm
[url=https://atenolol.works/]tenormin drug[/url] [url=https://viagrartabs.quest/]viagra tablet online order[/url] [url=https://avodart.digital/]avodart 0 5 mg[/url] [url=https://sildalis.shop/]sildalis 120 mg[/url]
Charlesaduse · August 3, 2022 at 3:36 am
[url=https://seroquel.guru/]how much is seroquel 25mg[/url]
MichaelGuabe · August 3, 2022 at 3:39 am
[url=https://canadianpharmacy.digital/]online pharmacy without insurance[/url]
Edgarlor · August 3, 2022 at 4:17 am
[url=https://suhagra.directory/]suhagra 100 mg[/url]
JudyCounk · August 3, 2022 at 9:56 am
[url=https://flomax.store/]buy flomax without prescription[/url]
JimCounk · August 3, 2022 at 11:38 am
[url=https://cytotec.digital/]cytotec 200mg pills generic[/url]
AlanCounk · August 3, 2022 at 12:48 pm
[url=https://synthroid.works/]levothyroxine synthroid[/url] [url=https://lyrica.guru/]lyrica for sale online[/url] [url=https://drugstore.boutique/]mypharmacy[/url] [url=https://buyzanaflex.shop/]zanaflex online[/url] [url=https://medrol.works/]generic medrol[/url] [url=https://buylanoxin.works/]digoxin prices[/url] [url=https://buydiclofenac.guru/]voltaren prescription canada[/url]
Estebanguall · August 3, 2022 at 1:08 pm
[url=http://diclofenac.digital/]diclofenac prescription uk[/url]
DavisMug · August 3, 2022 at 2:25 pm
[url=https://buyprozac.guru/]fluoxetine 250 mg[/url]
EyeCounk · August 3, 2022 at 7:47 pm
[url=https://augmentin.digital/]augmentin 1000 mg 62.5 mg[/url] [url=https://wellbutrin.guru/]bupropion 10mg[/url] [url=https://vardenafila.online/]levitra pills[/url] [url=https://disulfiram.guru/]antibuse[/url] [url=https://buylanoxin.works/]digoxin cost india[/url]
JackCounk · August 3, 2022 at 8:13 pm
[url=https://kamagra.boutique/]kamagra oral jelly safe[/url]
AshCounk · August 3, 2022 at 9:59 pm
[url=https://lisinopril.company/]buy lisinopril 5mg[/url] [url=https://buyglucophage.shop/]metformin cost in usa[/url]
MarvinZem · August 4, 2022 at 1:39 am
[url=https://zofran.guru/]cost for zofran brand name[/url]
AmyCounk · August 4, 2022 at 3:09 am
[url=https://cytotec.digital/]misoprostol[/url]
CarlCounk · August 4, 2022 at 5:33 am
[url=https://cipro.digital/]ciprofloxacin 500 for sale[/url]
Michaeldrist · August 4, 2022 at 6:28 am
[url=http://antabuse.company/]antabuse online pharmacy[/url]
Davidhup · August 4, 2022 at 3:11 pm
[url=https://phenergan.digital/]phenergan over the counter australia[/url]
JasonCounk · August 4, 2022 at 11:27 pm
[url=https://cytotec.digital/]cytotec oral[/url]
Gal Jerman · August 4, 2022 at 11:56 pm
Top ,.. top top … post! Keep the good work on !
EvaCounk · August 5, 2022 at 9:17 am
[url=http://drugstore.boutique/]mexican online mail order pharmacy[/url]
EvaCounk · August 5, 2022 at 4:06 pm
[url=http://buyaugmentin.guru/]amoxicillin otc uk[/url]
MiclTek · August 5, 2022 at 6:00 pm
[url=http://indocin.guru/]indocin 25mg cap[/url]
RobertFoold · August 5, 2022 at 6:57 pm
[url=http://suhagra.directory/]suhagra 50 price[/url]
Curtisvibia · August 6, 2022 at 12:04 am
[url=http://zithromaxa.online/]zithromax online buy[/url]
DarrylSef · August 6, 2022 at 1:06 am
[url=http://buyneurontin.guru/]gabapentin 50 mg tablets[/url] [url=http://buyaugmentin.digital/]amoxicillin tablets in india[/url] [url=http://antabuse.company/]disulfiram cost uk[/url] [url=http://pharmacyonline.works/]legit non prescription pharmacies[/url] [url=http://seroquel.guru/]how to get seroquel[/url] [url=http://zithromaxa.online/]cost of azithromycin[/url] [url=http://atenolol.works/]50 mg atenolol[/url] [url=http://gabapentin.directory/]neurontin cost uk[/url]
Jameseloro · August 6, 2022 at 4:40 am
[url=http://zithromaxa.online/]buying azithromycin in mexico[/url] [url=http://diclofenac.sale/]voltaren gel 300g[/url] [url=http://cialisztabs.quest/]buy cialis online in canada[/url] [url=http://seroquel.guru/]261 seroquel[/url] [url=http://avodart.digital/]avodart 5 mg[/url]
MarkCounk · August 6, 2022 at 3:14 pm
[url=https://sildenafila.online/]canadian viagra cheap[/url]
is.gd · August 6, 2022 at 3:49 pm
At the identical time, the primary insurance schemes for the underwriting of enterprise ventures turned
available.
DavisMug · August 7, 2022 at 12:18 am
[url=https://cialisgtab.monster/]cialis online nz[/url]
RichardFaply · August 7, 2022 at 2:54 pm
[url=https://trental.store/]trental 400 price[/url] [url=https://cytotec.boutique/]where can i purchase misoprostol[/url] [url=https://canadianpharmacy.digital/]pharmacy drugs[/url] [url=https://robaxin.guru/]robaxin 500 mg tablet price[/url]
JaneCounk · August 7, 2022 at 3:37 pm
[url=http://azithromycin.guru/]azithromycin 250 mg[/url]
RichardFaply · August 7, 2022 at 3:57 pm
[url=https://gabapentin.directory/]gabapentin for sale[/url] [url=https://viagraptabs.quest/]viagra for sale online in canada[/url] [url=https://indocin.guru/]indocin pill[/url] [url=https://zithromaxa.online/]brand name azithromycin[/url]
TimothyThive · August 7, 2022 at 5:05 pm
[url=https://cialisctabs.quest/]cheapest genuine cialis online[/url]
Michaelemult · August 8, 2022 at 12:00 am
[url=http://avodart.digital/]avodart 2.5 mg buy[/url]
TedCounk · August 8, 2022 at 12:10 am
[url=http://buylevitra.boutique/]price of levitra in mexico[/url]
Michaelemult · August 8, 2022 at 7:36 am
[url=http://clonidine.email/]clonidine hydrochloride 0.1 mg[/url]
YonCounk · August 8, 2022 at 9:41 am
[url=http://cialisqtab.quest/]buy cheap cialis canada[/url]
Michaelemult · August 8, 2022 at 6:03 pm
[url=http://nexium.works/]nexium 40mg capsules[/url]
TommyHepsy · August 8, 2022 at 7:20 pm
[url=https://viagraktab.quest/]viagra for sale online uk[/url]
JasonCounk · August 8, 2022 at 8:02 pm
[url=https://prednisolone.guru/]25mg prednisolone[/url]
WimCounk · August 8, 2022 at 9:56 pm
[url=http://clomid.golf/]buy clomid cheap[/url]
CarlCounk · August 9, 2022 at 1:21 am
[url=http://cialisstab.monster/]tadalafil 20mg online[/url]
Michaeldrist · August 9, 2022 at 3:12 am
[url=http://cialisatab.quest/]buying cialis online[/url]
LisaCounk · August 9, 2022 at 3:28 am
[url=https://buycymbalta.digital/]generic for cymbalta[/url]
KimCounk · August 9, 2022 at 4:18 am
[url=http://cialisytabs.monster/]order generic cialis online canada[/url]
DavisMug · August 9, 2022 at 9:09 am
[url=http://viagrattabs.monster/]retail price of viagra[/url]
JosephMaict · August 9, 2022 at 10:36 am
[url=https://ventolin.guru/]albuterol 20 mg[/url] [url=https://accutanetab.online/]buy accutane cream[/url] [url=https://viagragtabs.quest/]sildenafil tablet price[/url] [url=https://buycelebrex.boutique/]buy celebrex cheap[/url]
MiaCounk · August 9, 2022 at 1:07 pm
[url=https://medrol.shop/]medrol coupon[/url]
Estebanguall · August 9, 2022 at 1:16 pm
[url=http://propranolol.guru/]buy propranolol canada[/url]
MiclTek · August 9, 2022 at 5:48 pm
[url=http://viagragtabs.quest/]viagra for cheap[/url]
MiaCounk · August 9, 2022 at 9:47 pm
[url=https://pharmacyonline.guru/]online pharmacy without scripts[/url]
JaneCounk · August 10, 2022 at 6:49 am
[url=https://fluoxetine.boutique/]prozac 40 mg[/url]
Edgarlor · August 10, 2022 at 7:15 am
[url=http://cialisytab.monster/]where to order tadalafil tablets[/url]
TedCounk · August 10, 2022 at 8:50 am
[url=https://prednisolone.guru/]prednisolone 5mg coupon[/url]
AlanCounk · August 10, 2022 at 9:53 am
[url=http://viagraktabs.monster/]200 mg sildenafil[/url] [url=http://cialisitab.quest/]buy cialis online paypal[/url]
IvyCounk · August 10, 2022 at 10:09 am
[url=https://lexapro.works/]brand name lexapro 10mg[/url] [url=https://cialisbtab.monster/]purchase tadalafil[/url] [url=https://prednisolone.guru/]prednisolone over the counter australia[/url] [url=https://buypropranolol.shop/]inderal without prescription[/url] [url=https://cialisitab.quest/]buy cialis nz[/url] [url=https://buysynthroid.monster/]buy synthroid india[/url] [url=https://fluoxetine.digital/]80 mg fluoxetine daily[/url] [url=https://viagradtab.quest/]buy viagra online in australia[/url]
JaneCounk · August 10, 2022 at 11:57 am
[url=https://vpxl.digital/]generic vpxl[/url]
WimCounk · August 10, 2022 at 11:59 am
[url=http://zofran.cyou/]where can you get zofran[/url]
Estebanguall · August 10, 2022 at 12:01 pm
[url=http://cialisatab.quest/]how to buy cialis online safely[/url]
PaulCounk · August 10, 2022 at 12:05 pm
[url=https://neurontina.online/]gabapentin 400 mg[/url]
JaneCounk · August 10, 2022 at 12:08 pm
[url=https://cialisitab.quest/]cialis for sale over the counter[/url]
DarrylSef · August 10, 2022 at 12:08 pm
[url=http://buybenicar.works/]buy benicar online cheap[/url] [url=http://modafiniltab.online/]buy provigil online canada[/url]
AnnaCounk · August 10, 2022 at 12:13 pm
[url=http://celebrex.guru/]celebrex price[/url]
SueCounk · August 10, 2022 at 12:16 pm
[url=https://buyatarax.works/]atarax buy[/url]
Samuelraisk · August 10, 2022 at 12:19 pm
[url=http://stromectol.digital/]where to buy stromectol[/url]
AshCounk · August 10, 2022 at 12:27 pm
[url=https://vardenafiltabs.online/]levitra online best price[/url] [url=https://finasteride.directory/]cheap generic propecia uk[/url] [url=https://buydiclofenac.guru/]cheap diclofenac[/url] [url=https://allopurinol.guru/]allopurinol price uk[/url]
SueCounk · August 10, 2022 at 12:34 pm
[url=https://valtrex.works/]valtrex order[/url]
MichaelDwego · August 10, 2022 at 12:48 pm
[url=https://cialisvtab.quest/]cheapest tadalafil uk[/url]
AmyCounk · August 10, 2022 at 12:48 pm
[url=http://silagra.guru/]silagra 100mg[/url]
JimCounk · August 10, 2022 at 12:55 pm
[url=http://valtrex.works/]order generic valtrex online[/url]
Curtisvibia · August 10, 2022 at 1:03 pm
[url=https://paroxetine.boutique/]paxil for menopause[/url]
AshCounk · August 10, 2022 at 1:08 pm
[url=https://elimiteacticin.quest/]generic elimite cream price[/url] [url=https://cialisntab.monster/]tadalafil 2.5 mg price[/url] [url=https://retina.golf/]retin a cream gel[/url] [url=https://cholesterolrem.com/]generic lopid[/url] [url=https://hydroxychloroquine2022.online/]plaquenil tablets[/url] [url=https://hydroxychloroquine.agency/]plaquenil hydroxychloroquine cost[/url] [url=https://proscar911.com/]proscar 5mg price[/url]
MaryCounk · August 10, 2022 at 1:10 pm
[url=https://prednisolone.guru/]prednisolone tablets 5mg[/url] [url=https://buysynthroid.monster/]synthroid 0.088 mg[/url] [url=https://citalopram.boutique/]citalopram bipolar[/url] [url=https://vermoxtab.online/]where to buy vermox online[/url] [url=https://buyacyclovir.boutique/]acyclovir discount coupon[/url] [url=https://prednisone.works/]prednisone[/url] [url=https://buycialis.digital/]buy cialis fast shipping[/url] [url=https://benicar.guru/]benicar 5 mg price[/url]
IvyCounk · August 10, 2022 at 1:11 pm
[url=https://glucophage.digital/]metformin er 500 mg[/url] [url=https://viagrabtabs.quest/]buy sildenafil without prescription cheap[/url] [url=https://suhagra.store/]suhagra 100 canada[/url] [url=https://viagraktabs.monster/]canadian rx viagra[/url] [url=https://vpxl.digital/]vpxl[/url] [url=https://buyacyclovir.boutique/]over the counter acyclovir tablets[/url] [url=https://buyventolin.monster/]ventolin 2.5[/url]
Estebanguall · August 10, 2022 at 1:19 pm
[url=http://modafiniltab.online/]modafinil online canada[/url]
DenCounk · August 10, 2022 at 1:21 pm
[url=https://buyseroquel.boutique/]seroquel 5 mg[/url]
RodneyTab · August 10, 2022 at 1:26 pm
[url=http://kamagra.guru/]buy kamagra online uk[/url]
TommyHepsy · August 10, 2022 at 1:34 pm
[url=https://buystrattera.works/]strattera canadian pharmacy[/url]
JudyCounk · August 10, 2022 at 1:35 pm
[url=http://promethazine.store/]phenergan vc[/url]
KimCounk · August 10, 2022 at 1:44 pm
[url=http://acyclovir.directory/]acyclovir without prescription[/url]
PaulCounk · August 10, 2022 at 1:54 pm
[url=https://effexor.boutique/]effexor 300[/url]
CarlCounk · August 10, 2022 at 2:03 pm
[url=http://valtrex.works/]average cost of generic valtrex[/url]
SamCounk · August 10, 2022 at 2:05 pm
[url=http://buysynthroid.monster/]synthroid tablet 125 mcg cost[/url] [url=http://buyivermectin.boutique/]ivermectin 6 tablet[/url]
DavisMug · August 10, 2022 at 2:10 pm
[url=http://albenza.shop/]albenza cost[/url]
TommyHepsy · August 10, 2022 at 2:22 pm
[url=https://levaquin.shop/]levaquin buy online[/url]
RicIsose · August 10, 2022 at 2:30 pm
[url=https://buylisinopril.guru/]cost of lisinopril in mexico[/url] [url=https://buycelebrex.boutique/]celebrex drug price[/url] [url=https://clopidogrel.works/]plavix 40 mg tablets[/url] [url=https://buyrobaxin.shop/]robaxin 10[/url] [url=https://viagrastab.quest/]how much is viagra in south africa[/url]
Michaelemult · August 10, 2022 at 2:47 pm
[url=http://buyfinasteride.works/]propecia online pharmacy[/url]
CarlCounk · August 10, 2022 at 2:49 pm
[url=http://buycymbalta.digital/]cymbalta tablet[/url]
ElwoodGon · August 10, 2022 at 2:51 pm
[url=http://cialisqtabs.quest/]how to order cialis online[/url]
TedCounk · August 10, 2022 at 2:56 pm
[url=https://viagraftabs.monster/]buy sildenafil online cheap[/url]
Charlesaduse · August 10, 2022 at 3:16 pm
[url=https://buyclomid.works/]clomid 100g[/url]
BooCounk · August 10, 2022 at 3:18 pm
[url=https://wellbutrin.guru/]buproprion purchase online[/url]
Samuelraisk · August 10, 2022 at 3:22 pm
[url=http://buyclomid.works/]where can i buy clomid tablets[/url]
LisaCounk · August 10, 2022 at 3:25 pm
[url=https://viagraktabs.monster/]best price real viagra[/url]
ElwoodGon · August 10, 2022 at 3:26 pm
[url=http://xenical.digital/]orlistat generico[/url]
SueCounk · August 10, 2022 at 3:27 pm
[url=https://effexor.boutique/]effexor 75 mg tablets[/url]
DavisMug · August 10, 2022 at 3:27 pm
[url=http://buyneurontin.boutique/]gabapentin 800 mg pill[/url]
DarrylSef · August 10, 2022 at 3:41 pm
[url=http://synthroid.best/]cost of synthroid[/url] [url=http://neurontin.boutique/]neurontin sale[/url] [url=http://cialisqtabs.quest/]cialis 20mg price in india[/url] [url=http://modafiniltab.online/]order modafinil cheap[/url] [url=http://viagragtabs.quest/]viagra buy usa[/url] [url=http://viagrastab.quest/]canadian pharmacy viagra 100 mg[/url] [url=http://buylisinopril.guru/]lisinopril 20 mg daily[/url] [url=http://propranololtabs.online/]inderal 40 mg cost[/url]
IvyCounk · August 10, 2022 at 3:45 pm
[url=https://buyseroquel.boutique/]cost of seroquel 300 mg[/url] [url=https://viagrabtabs.quest/]viagra tablets online india[/url]
TedCounk · August 10, 2022 at 3:46 pm
[url=https://buyivermectin.boutique/]buy stromectol pills[/url]
Estebanguall · August 10, 2022 at 4:04 pm
[url=http://buybenicar.works/]benicar price[/url]
Michaeldrist · August 10, 2022 at 4:09 pm
[url=http://buymodafinil.guru/]modafinil cost uk[/url]
Samuelraisk · August 10, 2022 at 4:21 pm
[url=http://viagraetabs.quest/]sildenafil generic for sale[/url]
SueCounk · August 10, 2022 at 4:22 pm
[url=https://fluoxetine.digital/]fluoxetine online uk[/url]
AlanCounk · August 10, 2022 at 4:22 pm
[url=http://viagrautabs.monster/]100mg viagra pill[/url] [url=http://disulfiram.digital/]antabuse online uk[/url] [url=http://buyatarax.works/]atarax medicine[/url] [url=http://medrol.shop/]medrol tablet[/url] [url=http://albendazole.digital/]albendazole uk pharmacy[/url]
ElwoodGon · August 10, 2022 at 4:42 pm
[url=http://cialisxtab.monster/]how to buy real cialis online[/url]
Jameseloro · August 10, 2022 at 4:51 pm
[url=http://buyclomid.works/]clomid pill[/url] [url=http://xenical.digital/]purchase xenical online[/url] [url=http://buycelebrex.boutique/]generic celebrex 200mg price[/url] [url=http://cialisptabs.monster/]generic tadalafil[/url] [url=http://buyneurontin.boutique/]buy neurontin 300 mg[/url] [url=http://neurontin.boutique/]purchase neurontin[/url] [url=http://stromectol.digital/]stromectol online[/url] [url=http://propranololtabs.online/]propranolol er 60mg[/url]
Michaeldrist · August 10, 2022 at 5:01 pm
[url=http://gabapentintab.online/]neurontin prices[/url]
MiclTek · August 10, 2022 at 5:01 pm
[url=http://viagrattabs.monster/]canadian pharmacy viagra pills[/url]
AmyCounk · August 10, 2022 at 5:06 pm
[url=http://buysuhagra.store/]suhagra 100 online purchase[/url]
Estebanguall · August 10, 2022 at 5:14 pm
[url=http://buymodafinil.guru/]modafinil 200 mg india[/url]
IvyCounk · August 10, 2022 at 5:29 pm
[url=https://buyseroquel.boutique/]1200 mg seroquel[/url] [url=https://viagraotab.monster/]viagra discount prices[/url] [url=https://acyclovir.directory/]acyclovir 30g[/url] [url=https://cialisytabs.monster/]cheap cialis online india[/url]
Michaeldrist · August 10, 2022 at 5:29 pm
[url=http://kamagra.guru/]kamagra pills australia[/url]
KimCounk · August 10, 2022 at 5:30 pm
[url=http://cialisitab.quest/]online tadalafil 20mg[/url]
RichardFaply · August 10, 2022 at 5:37 pm
[url=http://nexium.works/]order nexium[/url] [url=http://pharmacy.golf/]medstore online pharmacy[/url] [url=http://plavix.works/]clopidogrel 25 mg[/url] [url=http://modafiniltab.online/]provigil online canada[/url] [url=http://viagrastab.quest/]buy generic viagra 100mg[/url] [url=http://cialisatab.quest/]generic daily cialis online[/url] [url=http://paroxetine.boutique/]12.5 mg paxil[/url]
SamCounk · August 10, 2022 at 5:45 pm
[url=http://medrol.shop/]medrol 6 mg[/url] [url=http://viagrautabs.monster/]how to buy genuine viagra online[/url] [url=http://cialisbtab.monster/]buy cialis tablets[/url] [url=http://viagraktabs.monster/]where can i buy viagra over the counter[/url] [url=http://buylisinopril.digital/]buy lisinopril 2.5 mg[/url]
YonCounk · August 10, 2022 at 5:46 pm
[url=https://silagra.guru/]buy silagra 100 mg[/url]
JaneCounk · August 10, 2022 at 5:47 pm
[url=https://suhagra.store/]suhagra online[/url]
JimCounk · August 10, 2022 at 5:58 pm
[url=http://viagradtab.quest/]canadian viagra 100mg[/url]
JoeCounk · August 10, 2022 at 6:01 pm
[url=http://buycialis.digital/]generic cialis price[/url] [url=http://viagraatab.quest/]over counter viagra[/url] [url=http://buyprednisolone.boutique/]buy prednisolone 25mg tablets[/url] [url=http://viagraftabs.monster/]viagra medicine online[/url] [url=http://fluoxetine.digital/]can i order prozac online[/url] [url=http://buypropranolol.shop/]order inderal[/url]
ElwoodGon · August 10, 2022 at 6:05 pm
[url=http://buylisinopril.guru/]lisinopril 10 12.55mg[/url]
MiclTek · August 10, 2022 at 6:06 pm
[url=http://cymbalta.sale/]cymbalta pill[/url]
PaulCounk · August 10, 2022 at 6:25 pm
[url=https://viagrautabs.monster/]sildenafil no rx[/url]
WimCounk · August 10, 2022 at 6:26 pm
[url=http://valtrextabs.online/]valtrex over counter[/url]
ElwoodGon · August 10, 2022 at 6:29 pm
[url=http://cialisxtab.monster/]discount cialis canada[/url]
DavisMug · August 10, 2022 at 6:39 pm
[url=http://buyclomid.works/]cost clomid[/url]
KimCounk · August 10, 2022 at 6:41 pm
[url=http://disulfiram.digital/]antabuse for sale[/url]
IvyCounk · August 10, 2022 at 6:47 pm
[url=https://pharmacyonline.guru/]canadian pharmacy service[/url] [url=https://acyclovir.directory/]acyclovir over the counter usa[/url] [url=https://citalopram.boutique/]celexa brand[/url] [url=https://suhagra.store/]buy suhagra online india[/url] [url=https://cialisstab.monster/]buy cialis soft online[/url] [url=https://buyatarax.works/]atarax 12.5 mg[/url] [url=https://vermoxtab.online/]buy vermox online[/url] [url=https://medrol.shop/]medrol 16 mg 1mg[/url]
Edgarlor · August 10, 2022 at 6:52 pm
[url=http://accutanetab.online/]accutane india[/url]
JimCounk · August 10, 2022 at 6:54 pm
[url=http://silagra.guru/]buy silagra in australia[/url]
JudyCounk · August 10, 2022 at 7:05 pm
[url=http://buystromectol.works/]ivermectin 10 mg[/url]
JoeCounk · August 10, 2022 at 7:06 pm
[url=http://buycialis.digital/]cialis online purchase canada[/url] [url=http://vpxl.digital/]buy vpxl[/url] [url=http://viagraktabs.monster/]lovegra[/url]
MarvinZem · August 10, 2022 at 7:12 pm
[url=https://buyprednisone.digital/]prednisone 475[/url]
TommyHepsy · August 10, 2022 at 7:18 pm
[url=https://pharmacy.golf/]pharmacy drugs[/url]
TommyHepsy · August 10, 2022 at 7:33 pm
[url=https://viagrattabs.monster/]viagra soft tablets[/url]
Michaelemult · August 10, 2022 at 7:40 pm
[url=http://drugstore.email/]pharmacy canadian superstore[/url]
MichaelDwego · August 10, 2022 at 7:42 pm
[url=https://neurontin.boutique/]gabapentin capsules 400mg[/url]
MiclTek · August 10, 2022 at 7:47 pm
[url=http://baclofen.digital/]baclofen medicine price[/url]
Edgarlor · August 10, 2022 at 7:59 pm
[url=http://buymodafinil.guru/]how much is generic provigil[/url]
TeoCounk · August 10, 2022 at 8:05 pm
[url=https://buystromectol.works/]stromectol covid[/url]
Michaelemult · August 10, 2022 at 8:07 pm
[url=http://pharmacy.golf/]online pharmacy[/url]
NickCounk · August 10, 2022 at 8:09 pm
[url=http://viagraatab.quest/]sildenafil citrate vs viagra[/url]
YonCounk · August 10, 2022 at 8:22 pm
[url=https://glucophage.digital/]metformin tab price[/url]
JasonCounk · August 10, 2022 at 8:31 pm
[url=https://buyventolin.monster/]albuterol 108 mcg[/url]
KiaCounk · August 10, 2022 at 8:36 pm
[url=https://effexor.boutique/]effexor 100mg[/url]
TimothyThive · August 10, 2022 at 8:43 pm
[url=https://buycelebrex.boutique/]celebrex generic over the counter[/url]
Curtisvibia · August 10, 2022 at 8:52 pm
[url=https://synthroid.best/]synthroid 112 coupon[/url]
AshCounk · August 10, 2022 at 8:55 pm
[url=https://synthroid.store/]synthroid 0.0125 mg[/url] [url=https://estrace.live/]estrace 5mg[/url] [url=https://buspar.store/]buspar price canada[/url] [url=https://silagra.shop/]silagra[/url] [url=https://olmesartan.quest/]how much is brand name benicar[/url] [url=https://cialishtab.quest/]where can you get cialis over the counter[/url] [url=https://buymodafinil.works/]how to get modafinil[/url]
MarkCounk · August 10, 2022 at 8:58 pm
[url=https://benicar.guru/]benicar generic coupon[/url]
Curtisvibia · August 10, 2022 at 9:03 pm
[url=https://nexium.works/]cost of nexium[/url]
JimCounk · August 10, 2022 at 9:19 pm
[url=http://viagraatab.quest/]buy generic viagra online usa[/url]
JudyCounk · August 10, 2022 at 9:24 pm
[url=http://celebrex.guru/]celebrex medicine price[/url]
TedCounk · August 10, 2022 at 9:29 pm
[url=https://buycialis.digital/]cost of generic cialis in canada[/url]
AlanCounk · August 10, 2022 at 9:39 pm
[url=http://buypropranolol.shop/]inderal discount[/url] [url=http://promethazine.store/]price of phenergan[/url] [url=http://buystromectol.works/]buy ivermectin online[/url] [url=http://hydrochlorothiazide.boutique/]buy zestoretic[/url] [url=http://viagractab.monster/]best site to buy viagra online[/url] [url=http://lexapro.works/]generic lexapro australia[/url] [url=http://viagraotab.monster/]sildenafil online india[/url]
DarrylSef · August 10, 2022 at 9:40 pm
[url=http://cialisvtab.quest/]canadian pharmacy cialis daily use[/url] [url=http://viagrastab.quest/]buy women viagra online[/url] [url=http://pharmacy.golf/]safe canadian pharmacies[/url] [url=http://stromectol.digital/]cost of stromectol[/url]
IvyCounk · August 10, 2022 at 9:44 pm
[url=https://viagraftabs.monster/]order sildenafil canada[/url] [url=https://buyseroquel.boutique/]seroquel 800 mg[/url] [url=https://prednisone.works/]prednisone 100 mg daily[/url] [url=https://lexapro.works/]lexapro 150 mg[/url] [url=https://viagradtab.quest/]online viagra generic[/url] [url=https://effexor.boutique/]generic effexor price[/url]
LisaCounk · August 10, 2022 at 9:48 pm
[url=https://glucophage.digital/]metformin usa[/url]
Samuelraisk · August 10, 2022 at 10:08 pm
[url=http://neurontintab.online/]average cost of gabapentin[/url]
UgoCounk · August 10, 2022 at 10:24 pm
[url=http://suhagra.cfd/]suhagra tablet 50 mg[/url]
KiaCounk · August 10, 2022 at 10:34 pm
[url=https://celebrex.guru/]celebrex 200 mg price comparison[/url]
JaneCounk · August 10, 2022 at 11:02 pm
[url=https://cialisstab.monster/]cialis 20 g[/url]
AnnaCounk · August 10, 2022 at 11:10 pm
[url=http://disulfiram.digital/]disulfiram 250 mg buy online[/url]
Davidhup · August 10, 2022 at 11:12 pm
[url=https://buyprednisone.digital/]prednisone 54899[/url]
MarvinZem · August 10, 2022 at 11:15 pm
[url=https://buymodafinil.guru/]how to buy provigil[/url]
Michaelemult · August 10, 2022 at 11:17 pm
[url=http://clopidogrel.works/]plavix generic cost[/url]
Jameseloro · August 10, 2022 at 11:22 pm
[url=http://propranolol.guru/]buy inderal online without prescription[/url] [url=http://viagragtabs.quest/]best viagra prices[/url] [url=http://buyfinasteride.works/]where to buy propecia in singapore[/url]
RicIsose · August 10, 2022 at 11:29 pm
[url=https://cialisxtab.monster/]cialis prescription online canada[/url] [url=https://clopidogrel.works/]clopidogrel 20 mg[/url] [url=https://levaquin.shop/]levaquin.com[/url] [url=https://viagragtabs.quest/]viagra usa over the counter[/url] [url=https://neurontintab.online/]neurontin 300 mg capsule[/url] [url=https://viagraktab.quest/]how much is generic viagra in mexico[/url]
RobertFoold · August 10, 2022 at 11:30 pm
[url=https://cialisatab.quest/]buy cialis by paypal[/url]
JaneCounk · August 10, 2022 at 11:31 pm
[url=https://viagraftabs.monster/]canadian prices for sildenafil[/url]
RicIsose · August 10, 2022 at 11:35 pm
[url=https://levaquin.shop/]levaquin prices[/url] [url=https://albenza.shop/]albendazole pills[/url] [url=https://xenical.digital/]xenical price uk[/url] [url=https://buymodafinil.guru/]how to order provigil[/url] [url=https://buyclomid.works/]order clomid 50mg[/url] [url=https://cialisptabs.monster/]canada pharmacy cialis[/url] [url=https://ventolin.guru/]albuterol 063[/url] [url=https://buybenicar.works/]cost of benicar 40 mg[/url]
RicIsose · August 10, 2022 at 11:37 pm
[url=https://buylisinopril.guru/]zestril 2.5[/url] [url=https://pharmacy.golf/]online canadian pharmacy coupon[/url] [url=https://cialisvtab.quest/]cialis brand coupon[/url] [url=https://viagraktab.quest/]viagra from canadian pharmacy[/url] [url=https://cialisatab.quest/]buy cialis for daily use online[/url]
SueCounk · August 10, 2022 at 11:48 pm
[url=https://viagractab.monster/]buy viagra online usa no prescription[/url]
EyeCounk · August 11, 2022 at 12:02 am
[url=https://disulfiram.digital/]medication disulfiram[/url] [url=https://viagrabtabs.quest/]generic viagra online purchase[/url] [url=https://buyatarax.works/]atarax drug[/url]
RodneyTab · August 11, 2022 at 12:15 am
[url=http://anafranil.boutique/]anafranil canada[/url]
TedCounk · August 11, 2022 at 12:25 am
[url=https://cialisitab.quest/]tadalafil 20mg coupon[/url]
ElwoodGon · August 11, 2022 at 12:29 am
[url=http://cialisptabs.monster/]generic tadalafil from uk[/url]
JaneCounk · August 11, 2022 at 1:01 am
[url=https://albendazole.digital/]albendazole for sale[/url]
JackCounk · August 11, 2022 at 1:01 am
[url=http://zofran.boutique/]where to buy zofran over the counter[/url]
Samuelraisk · August 11, 2022 at 1:07 am
[url=http://viagraktab.quest/]buy cheap viagra usa[/url]
TommyHepsy · August 11, 2022 at 1:10 am
[url=https://buyneurontin.boutique/]gabapentin 900[/url]
ElwoodGon · August 11, 2022 at 1:14 am
[url=http://gabapentintab.online/]buy neurontin canada[/url]
MiclTek · August 11, 2022 at 1:14 am
[url=http://paroxetine.boutique/]paxil online no prescription[/url]
TeoCounk · August 11, 2022 at 1:19 am
[url=https://benicar.guru/]benicar 12.5 mg[/url]
LisaCounk · August 11, 2022 at 1:33 am
[url=https://lexapro.works/]lexapro india[/url]
RodneyTab · August 11, 2022 at 1:38 am
[url=http://xenical.digital/]buy xenical 120mg online usa[/url]
WimCounk · August 11, 2022 at 1:44 am
[url=http://estrace.store/]price of estrace cream[/url]
Michaelemult · August 11, 2022 at 1:53 am
[url=http://buystrattera.works/]buy strattera uk[/url]
IvyCounk · August 11, 2022 at 1:53 am
[url=https://buyatarax.works/]atarax otc[/url] [url=https://cialisitab.quest/]15 mg cialis[/url] [url=https://citalopram.boutique/]citalopram[/url] [url=https://pharmacyonline.guru/]reputable canadian online pharmacies[/url] [url=https://acyclovir.directory/]cheap zovirax cream online[/url] [url=https://promethazine.store/]phenergan tablets 25mg uk[/url]
AlanCounk · August 11, 2022 at 2:01 am
[url=http://buyatarax.works/]atarax brand name[/url] [url=http://vermoxtab.online/]where can i buy vermox in uk[/url] [url=http://viagraotab.monster/]cheap viagra online united states[/url] [url=http://silagra.guru/]silagra 50 mg[/url]
Samuelraisk · August 11, 2022 at 2:03 am
[url=http://buycelebrex.boutique/]celebrex price in south africa[/url]
SamCounk · August 11, 2022 at 2:16 am
[url=http://vermoxtab.online/]vermox canada[/url] [url=http://cialisstab.monster/]cheapest tadalafil us[/url] [url=http://neurontina.online/]600 mg gabapentin cost[/url] [url=http://suhagra.store/]suhagra tablet 50 mg[/url] [url=http://buylisinopril.digital/]prinzide zestoretic[/url] [url=http://buycialis.digital/]can you order cialis online[/url]
DenCounk · August 11, 2022 at 2:28 am
[url=https://cialisitab.quest/]cialis in india[/url]
SamCounk · August 11, 2022 at 2:29 am
[url=http://citalopram.boutique/]20 mg citalopram[/url] [url=http://fluoxetine.boutique/]fluoxetine hcl 10mg[/url] [url=http://viagraktabs.monster/]viagra prescription buy[/url] [url=http://fluoxetine.digital/]fluoxetine 20mg capsules[/url] [url=http://buysynthroid.monster/]synthroid 75 mcg cheap[/url] [url=http://cialisytabs.monster/]cialis 5mg generic[/url]
Charlesaduse · August 11, 2022 at 2:35 am
[url=https://cialisjtabs.monster/]cialis generic tadalafil[/url]
ElwoodGon · August 11, 2022 at 2:38 am
[url=http://levaquin.shop/]levaquin 250mg[/url]
Michaeldrist · August 11, 2022 at 2:40 am
[url=http://albuterol.directory/]albuterol 990 mcg[/url]
BooCounk · August 11, 2022 at 2:48 am
[url=https://finasteride.boutique/]propecia online no prescription[/url]
Davidhup · August 11, 2022 at 3:01 am
[url=https://buyprednisone.works/]buy deltasone online[/url]
KimCounk · August 11, 2022 at 3:01 am
[url=http://cialisitab.quest/]tadalafil fast delivery[/url]
SueCounk · August 11, 2022 at 3:07 am
[url=https://viagraktabs.monster/]generic for viagra[/url]
BooCounk · August 11, 2022 at 3:13 am
[url=https://arimidex.store/]arimidex weight loss[/url]
RichardFaply · August 11, 2022 at 3:14 am
[url=http://accutanetab.online/]accutane medicine[/url] [url=http://modafiniltab.online/]modafinil singapore buy[/url] [url=http://viagrastab.quest/]viagra 100mg tablets[/url] [url=http://neurontintab.online/]gabapentin 309 mg[/url] [url=http://synthroid.best/]synthroid 88 mcg price[/url]
RodneyTab · August 11, 2022 at 3:21 am
[url=http://clopidogrel.works/]cheap clopidogrel[/url]
TeoCounk · August 11, 2022 at 3:28 am
[url=https://neurontina.online/]neurontin 100mg[/url]
Samuelraisk · August 11, 2022 at 3:31 am
[url=http://plavix.works/]plavix buy online uk[/url]
DarrylSef · August 11, 2022 at 3:45 am
[url=http://plavix.works/]clopidogrel 894[/url] [url=http://accutanetab.online/]accutane online no prescription[/url] [url=http://viagrastab.quest/]how to purchase viagra pills[/url] [url=http://buystrattera.works/]brand name strattera[/url] [url=http://viagraetabs.quest/]generic viagra singapore[/url]
SueCounk · August 11, 2022 at 3:45 am
[url=https://viagraatab.quest/]viagra 100mg india price[/url]
JimCounk · August 11, 2022 at 4:02 am
[url=http://disulfiram.digital/]can you buy antabuse over the counter in uk[/url]
SamCounk · August 11, 2022 at 4:05 am
[url=http://cialisstab.monster/]buy cialis with paypal[/url] [url=http://buylisinopril.digital/]25 mg lisinopril[/url] [url=http://suhagra.store/]suhagra online purchase[/url] [url=http://buyventolin.monster/]ventolin no prescription[/url] [url=http://neurontina.online/]buy gabapentin india[/url] [url=http://buyivermectin.boutique/]stromectol pill for humans[/url]
SueCounk · August 11, 2022 at 4:38 am
[url=https://buysuhagra.store/]suhagra 100 usa[/url]
MarvinZem · August 11, 2022 at 4:41 am
[url=https://synthroid.best/]synthroid armour[/url]
JoeCounk · August 11, 2022 at 4:41 am
[url=http://celebrex.guru/]celebrex without prescription[/url] [url=http://vpxl.digital/]vpxl online[/url] [url=http://viagraotab.monster/]how to buy viagra over the counter[/url] [url=http://buypropecia.works/]finpecia without prescription[/url] [url=http://buystromectol.works/]ivermectin lice[/url] [url=http://citalopram.boutique/]celexa 40 mg tablet[/url] [url=http://fluoxetine.boutique/]can you buy prozac over the counter uk[/url]
ElwoodGon · August 11, 2022 at 5:03 am
[url=http://buymodafinil.guru/]where to purchase modafinil[/url]
LisaCounk · August 11, 2022 at 5:07 am
[url=https://viagraatab.quest/]brand viagra online canada[/url]
BooCounk · August 11, 2022 at 5:07 am
[url=https://amitriptylineelavil.quest/]amitriptyline 75mg for sale[/url]
CarlCounk · August 11, 2022 at 5:12 am
[url=http://albendazole.digital/]drug albendazole[/url]
Michaeldrist · August 11, 2022 at 5:13 am
[url=http://nexium.works/]nexium 10 mg otc[/url]
Davidhup · August 11, 2022 at 5:21 am
[url=https://kamagra.guru/]kamagra oral jelly 100mg suppliers australia[/url]
PaulCounk · August 11, 2022 at 5:24 am
[url=https://cialisytabs.monster/]cialis 40 mg generic[/url]
Estebanguall · August 11, 2022 at 5:35 am
[url=http://buycelebrex.boutique/]celebrex 100mg[/url]
IvyCounk · August 11, 2022 at 5:45 am
[url=https://buystromectol.works/]ivermectin cost[/url] [url=https://cialisitab.quest/]tadalafil 20mg price in usa[/url] [url=https://zofran.boutique/]where can you buy zofran[/url] [url=https://disulfiram.digital/]antabuse pill over the counter[/url] [url=https://acyclovir.directory/]zovirax suspension[/url]
Curtisvibia · August 11, 2022 at 5:50 am
[url=https://buyfinasteride.works/]best online propecia[/url]
JaneCounk · August 11, 2022 at 6:06 am
[url=https://celebrex.guru/]celebrex 100mg capsule cost[/url]
ElwoodGon · August 11, 2022 at 6:10 am
[url=http://cialisytab.monster/]where can i order cialis online[/url]
IvyCounk · August 11, 2022 at 6:11 am
[url=https://suhagra.store/]suhagra 50 mg tablet online purchase[/url] [url=https://prednisone.works/]prednisone 6 mg[/url] [url=https://celebrex.guru/]celebrex generic[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide 12.5 mg tablet[/url] [url=https://vermoxtab.online/]vermox over the counter usa[/url] [url=https://buylisinopril.digital/]can i buy lisinopril over the counter in canada[/url]
Charlesaduse · August 11, 2022 at 6:12 am
[url=https://baclofen.digital/]lioresal best price[/url]
MichaelGuabe · August 11, 2022 at 6:22 am
[url=https://buyrobaxin.shop/]robaxin pills[/url]
AshCounk · August 11, 2022 at 6:23 am
[url=https://lopressormetoprolol.quest/]lopressor 50 mg price[/url] [url=https://accutane.boutique/]buy accutane online usa[/url] [url=https://strattera.shop/]cost of strattera in australia[/url] [url=https://chloroquinepills.quest/]buy aralen online uk[/url] [url=https://lisinopril.directory/]20 mg lisinopril without a prescription[/url] [url=https://lexapro.digital/]20 mg lexapro[/url] [url=https://metformin.solutions/]order metformin online without prescription[/url]
TommyHepsy · August 11, 2022 at 6:26 am
[url=https://levaquin.shop/]levaquin 500 mg levofloxacin antibiotics[/url]
Michaeldrist · August 11, 2022 at 6:26 am
[url=http://drugstore.email/]mail order pharmacy[/url]
SamCounk · August 11, 2022 at 6:30 am
[url=http://effexor.boutique/]effexor 50 mg tablets[/url] [url=http://neurontina.online/]gabapentin generic cost[/url] [url=http://cialisytabs.monster/]cialis online discount[/url] [url=http://celebrex.guru/]celebrex brand name[/url] [url=http://vpxl.digital/]vpxl[/url] [url=http://buyacyclovir.boutique/]acyclovir 1000 mg cost[/url] [url=http://buyatarax.works/]atarax generic[/url]
EyeCounk · August 11, 2022 at 6:31 am
[url=https://viagractab.monster/]20 mg generic sildenafil[/url] [url=https://valtrex.works/]how to get valtrex prescription online[/url] [url=https://buyacyclovir.boutique/]acyclovir 800 online no rx[/url]
Michaeldrist · August 11, 2022 at 6:46 am
[url=http://propranololtabs.online/]propranolol 50 mg[/url]
JosephMaict · August 11, 2022 at 6:48 am
[url=https://propranolol.guru/]propranolol 20 mg tablet brand name[/url] [url=https://buybenicar.works/]benicar 12.5 mg[/url] [url=https://cialisxtab.monster/]generic tadalafil for sale[/url] [url=https://viagrastab.quest/]generic viagra 150 mg pills[/url] [url=https://viagraetabs.quest/]female viagra paypal[/url] [url=https://plavix.works/]plavix otc[/url] [url=https://buyneurontin.boutique/]neurontin mexico[/url]
JaneCounk · August 11, 2022 at 7:14 am
[url=https://buyprednisolone.boutique/]prednisolone 25 mg cost[/url]
MichaelDwego · August 11, 2022 at 7:14 am
[url=https://buybenicar.works/]benicar 20 mg canada[/url]
KiaCounk · August 11, 2022 at 7:23 am
[url=https://lexapro.works/]lexapro 5mg price[/url]
RicIsose · August 11, 2022 at 7:25 am
[url=https://viagraetabs.quest/]can i buy genuine viagra online[/url] [url=https://baclofen.digital/]baclofen price australia[/url] [url=https://ventolin.guru/]buy albuterol without a prescription[/url] [url=https://buyclomid.works/]where can i purchase clomid over the counter[/url]
JudyCounk · August 11, 2022 at 7:41 am
[url=http://vpxl.digital/]buy vpxl online[/url]
Jameseloro · August 11, 2022 at 7:42 am
[url=http://albenza.shop/]albenza 1996[/url] [url=http://buybenicar.works/]brand name benicar cost[/url] [url=http://modafiniltab.online/]can you buy provigil over the counter[/url]
YonCounk · August 11, 2022 at 7:55 am
[url=https://pharmacyonline.guru/]web pharmacy[/url]
KimCounk · August 11, 2022 at 7:56 am
[url=http://pharmacyonline.guru/]all med pharmacy[/url]
MichaelGuabe · August 11, 2022 at 8:06 am
[url=https://buyneurontin.boutique/]buy gabapentin 100mg[/url]
NickCounk · August 11, 2022 at 8:07 am
[url=http://disulfiram.digital/]antabuse cost[/url]
DarrylSef · August 11, 2022 at 8:25 am
[url=http://viagragtabs.quest/]best cheap viagra pills[/url] [url=http://cialisptabs.monster/]cialis 5mg best price australia[/url] [url=http://viagrattabs.monster/]viagra 150[/url] [url=http://gabapentintab.online/]gabapentin 1000mg tablet[/url]
MiclTek · August 11, 2022 at 8:25 am
[url=http://cialisjtabs.monster/]soft chewable cialis[/url]
JaneCounk · August 11, 2022 at 8:29 am
[url=https://pharmacyonline.guru/]canadadrugpharmacy com[/url]
MiclTek · August 11, 2022 at 8:45 am
[url=http://ventolin.guru/]ventolin cap[/url]
LisaCounk · August 11, 2022 at 8:49 am
[url=https://viagraatab.quest/]sildenafil in mexico[/url]
TedCounk · August 11, 2022 at 8:54 am
[url=https://zofran.boutique/]cheapest zofran[/url]
CarlCounk · August 11, 2022 at 8:56 am
[url=http://viagraotab.monster/]viagra 300mg price[/url]
AmyCounk · August 11, 2022 at 9:05 am
[url=http://buyatarax.works/]buy atarax over the counter[/url]
UgoCounk · August 11, 2022 at 9:08 am
[url=http://citalopram.cfd/]cost of celexa 10mg[/url]
DavisMug · August 11, 2022 at 9:12 am
[url=http://buylisinopril.guru/]lisinopril tablets india[/url]
JaneCounk · August 11, 2022 at 9:16 am
[url=https://buypropranolol.shop/]innopran buy[/url]
BooCounk · August 11, 2022 at 9:38 am
[url=https://busparone.com/]can i buy buspar online[/url]
MarkCounk · August 11, 2022 at 9:42 am
[url=https://celebrex.guru/]celebrex gel[/url]
DavisMug · August 11, 2022 at 9:57 am
[url=http://stromectol.digital/]stromectol nz[/url]
MarkCounk · August 11, 2022 at 10:11 am
[url=https://buystromectol.works/]stromectol 3 mg price[/url]
SueCounk · August 11, 2022 at 10:26 am
[url=https://viagraftabs.monster/]where can i buy generic viagra in usa[/url]
Curtisvibia · August 11, 2022 at 10:27 am
[url=https://synthroid.best/]cost of synthroid 75 mg[/url]
Michaelemult · August 11, 2022 at 10:33 am
[url=http://viagraetabs.quest/]viagra pills price in usa[/url]
JoeCounk · August 11, 2022 at 10:47 am
[url=http://silagra.guru/]silagra online uk[/url] [url=http://viagractab.monster/]viagra 100mg price in australia[/url] [url=http://valtrex.works/]valtrex discount price[/url]
Estebanguall · August 11, 2022 at 11:14 am
[url=http://cialisvtab.quest/]buy cialis online in india[/url]
AshCounk · August 11, 2022 at 11:23 am
[url=https://lexapr0.com/]lexapro 40[/url] [url=https://buysildalis.monster/]sildalis without prescription[/url] [url=https://avodart.digital/]avodart australia[/url] [url=https://singulair10.com/]singulair 5 mg[/url]
DarrylSef · August 11, 2022 at 11:24 am
[url=http://cialisjtabs.monster/]order cialis from india[/url] [url=http://buygabapentin.store/]gabapentin 100 mg capsule[/url] [url=http://kamagra.guru/]kamagra 50mg uk[/url] [url=http://cialisqtabs.quest/]average cost of cialis prescription[/url] [url=http://buystrattera.works/]strattera 18[/url] [url=http://xenical.digital/]buy xenical online australia[/url] [url=http://propranololtabs.online/]daily use propranolol[/url]
Davidhup · August 11, 2022 at 11:31 am
[url=https://gabapentintab.online/]gabapentin pill 100mg[/url]
TedCounk · August 11, 2022 at 11:34 am
[url=https://vpxl.digital/]vpxl for sale[/url]
Samuelraisk · August 11, 2022 at 11:37 am
[url=http://propranolol.guru/]propranolol 10 mg tablet price[/url]
WimCounk · August 11, 2022 at 11:37 am
[url=http://anafranilclomipramine.quest/]anafranil 50 mg capsule[/url]
RodneyTab · August 11, 2022 at 11:40 am
[url=http://paroxetine.boutique/]buy paroxetine tablets in india[/url]
Charlesaduse · August 11, 2022 at 11:43 am
[url=https://neurontin.boutique/]neurontin 3[/url]
DarrylSef · August 11, 2022 at 11:44 am
[url=http://drugstore.email/]legitimate canadian mail order pharmacy[/url] [url=http://buymodafinil.guru/]can i buy provigil online[/url]
MiaCounk · August 11, 2022 at 11:49 am
[url=https://viagraatab.quest/]lowest cost for viagra[/url]
JoeCounk · August 11, 2022 at 11:53 am
[url=http://buyacyclovir.boutique/]zovirax discount[/url] [url=http://buypropecia.works/]propecia rx[/url] [url=http://glucophage.digital/]cheap metformin online[/url] [url=http://viagraftabs.monster/]female viagra pill cost[/url] [url=http://disulfiram.digital/]how to get antabuse prescription[/url] [url=http://buylisinopril.digital/]buy lisinopril canada[/url] [url=http://medrol.shop/]medrol generic prices[/url]
ZakCounk · August 11, 2022 at 11:53 am
[url=https://viagractab.monster/]order prescription viagra online[/url] [url=https://buycialis.digital/]tadalafil capsule[/url] [url=https://citalopram.boutique/]celexa tablet[/url]
TimothyThive · August 11, 2022 at 11:54 am
[url=https://buyprednisone.works/]where to buy prednisone without a prescription[/url]
MaryCounk · August 11, 2022 at 12:00 pm
[url=https://medrol.shop/]medrol tablets 8mg[/url] [url=https://cialisytabs.monster/]cialis 2.5 price[/url] [url=https://suhagra.store/]suhagra 25 mg buy online india[/url] [url=https://vpxl.digital/]vpxl[/url] [url=https://buyivermectin.boutique/]stromectol cream[/url] [url=https://cialisstab.monster/]where to buy generic cialis[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide 12.5 mg daily[/url] [url=https://prednisolone.guru/]buying prednisolone online[/url]
WimCounk · August 11, 2022 at 12:31 pm
[url=http://buytadacip.monster/]buy tadacip 20 mg without prescription[/url]
SamCounk · August 11, 2022 at 12:39 pm
[url=http://buypropranolol.shop/]over the counter propranolol[/url] [url=http://acyclovir.directory/]acyclovir 800[/url] [url=http://valtrex.works/]how much is valtrex tablets[/url] [url=http://buycymbalta.digital/]best price for cymbalta[/url] [url=http://buyatarax.works/]buy atarax tablets uk[/url]
IvyCounk · August 11, 2022 at 12:40 pm
[url=https://viagractab.monster/]otc viagra australia[/url] [url=https://viagrabtabs.quest/]cheap viagra 150 mg[/url] [url=https://vermoxtab.online/]where can i buy vermox over the counter[/url] [url=https://citalopram.boutique/]order citalopram online[/url] [url=https://prednisone.works/]prednisone 20 mg over the counter[/url] [url=https://buypropranolol.shop/]inderal 80 mg tablets[/url] [url=https://prednisolone.guru/]prednisolone 1[/url] [url=https://buyacyclovir.boutique/]acyclovir tablet singapore[/url]
JoeCounk · August 11, 2022 at 12:44 pm
[url=http://citalopram.boutique/]celexa[/url] [url=http://benicar.guru/]benicar 10[/url] [url=http://viagrabtabs.quest/]average price of viagra[/url] [url=http://viagractab.monster/]india sildenafil[/url] [url=http://buystromectol.works/]ivermectin pills[/url] [url=http://hydrochlorothiazide.boutique/]hydrochlorothiazide 25 mg tablet[/url]
PaulCounk · August 11, 2022 at 12:48 pm
[url=https://viagraatab.quest/]viagra cheap prices[/url]
Samuelraisk · August 11, 2022 at 12:54 pm
[url=http://buygabapentin.store/]where to buy gabapentin[/url]
RicIsose · August 11, 2022 at 1:00 pm
[url=https://levaquin.shop/]cost of levaquin[/url] [url=https://viagrastab.quest/]buy viagra over the counter uk[/url] [url=https://accutanetab.online/]best accutane brand[/url]
NickCounk · August 11, 2022 at 1:09 pm
[url=http://celebrex.guru/]celebrex 200mg over the counter[/url]
YonCounk · August 11, 2022 at 1:17 pm
[url=https://buycialis.digital/]cialis pills where to buy[/url]
Charlesaduse · August 11, 2022 at 1:18 pm
[url=https://buyprednisone.digital/]prednisone over the counter south africa[/url]
JudyCounk · August 11, 2022 at 1:23 pm
[url=http://viagraktabs.monster/]viagra 50 mg coupon[/url]
KiaCounk · August 11, 2022 at 1:23 pm
[url=https://vermoxtab.online/]vermox price in south africa[/url]
DavisMug · August 11, 2022 at 1:26 pm
[url=http://buyfinasteride.works/]cost for propecia[/url]
RobertFoold · August 11, 2022 at 2:02 pm
[url=https://accutanetab.online/]buy accutane from canada[/url]
Michaeldrist · August 11, 2022 at 2:06 pm
[url=http://cialisjtabs.monster/]tadalafil india price[/url]
JaneCounk · August 11, 2022 at 2:09 pm
[url=https://neurontina.online/]neurontin capsule 600mg[/url]
MiclTek · August 11, 2022 at 2:10 pm
[url=http://buyrobaxin.shop/]robaxin without rx[/url]
MiclTek · August 11, 2022 at 2:11 pm
[url=http://albenza.shop/]albendazole buy canada[/url]
Charlesaduse · August 11, 2022 at 2:17 pm
[url=https://anafranil.boutique/]anafranil tablet 10 mg[/url]
EyeCounk · August 11, 2022 at 2:33 pm
[url=https://celebrex.guru/]price of celebrex in canada[/url] [url=https://lexapro.works/]lowest price lexapro 20 mg[/url] [url=https://buyivermectin.boutique/]stromectol 3 mg tablets price[/url] [url=https://fluoxetine.digital/]10 mg fluoxetine[/url]
TedCounk · August 11, 2022 at 2:34 pm
[url=https://buylisinopril.digital/]lisinopril 10 mg prices[/url]
JackCounk · August 11, 2022 at 2:44 pm
[url=http://effexor.boutique/]effexor 300 mg[/url]
IvyCounk · August 11, 2022 at 2:55 pm
[url=https://viagradtab.quest/]viagra tablet 25 mg price[/url] [url=https://acyclovir.directory/]acyclovir 400mg tablets price[/url] [url=https://buyivermectin.boutique/]ivermectin buy uk[/url] [url=https://viagraatab.quest/]sildenafil 100mg usa[/url] [url=https://buyventolin.monster/]ventolin price[/url] [url=https://vermoxtab.online/]buy vermox in usa[/url]
KiaCounk · August 11, 2022 at 3:02 pm
[url=https://promethazine.store/]order phenergan without prescription[/url]
Michaelemult · August 11, 2022 at 3:02 pm
[url=http://baclofen.digital/]lioresal 10 mg[/url]
TommyHepsy · August 11, 2022 at 3:20 pm
[url=https://buybenicar.works/]benicar 20 mg generic[/url]
IvyCounk · August 11, 2022 at 3:20 pm
[url=https://lexapro.works/]lexapro 40 mg tablet[/url] [url=https://fluoxetine.digital/]prozac 80 mg[/url] [url=https://promethazine.store/]phenergan over the counter canada[/url] [url=https://suhagra.store/]suhagra tablet[/url] [url=https://celebrex.guru/]online celebrex[/url] [url=https://glucophage.digital/]order metformin 1000 mg[/url]
SamCounk · August 11, 2022 at 3:28 pm
[url=http://buyseroquel.boutique/]seroquel liquid formulation[/url] [url=http://prednisone.works/]prednisone online australia[/url] [url=http://viagraotab.monster/]viagra generic online usa[/url] [url=http://cialisitab.quest/]how much is generic cialis[/url] [url=http://hydrochlorothiazide.boutique/]hydrochlorothiazide 10 mg[/url] [url=http://medrol.shop/]medrol 2mg tablet[/url]
NickCounk · August 11, 2022 at 3:29 pm
[url=http://fluoxetine.digital/]prozac 10 mg tablet[/url]
WilliamWem · August 11, 2022 at 3:31 pm
[url=https://viagrattabs.monster/]viagra price canada[/url] [url=https://cialisatab.quest/]buy tadalafil[/url] [url=https://cialisqtabs.quest/]buy cialis with paypal[/url] [url=https://viagrastab.quest/]vigara[/url] [url=https://ventolin.guru/]albuterol discount coupon[/url] [url=https://baclofen.digital/]baclofen tablets uk[/url] [url=https://neurontin.boutique/]buy gabapentin online usa[/url]
SamCounk · August 11, 2022 at 3:38 pm
[url=http://celebrex.guru/]cheap celebrex[/url] [url=http://albendazole.digital/]albendazole price canada[/url] [url=http://viagraatab.quest/]buying viagra in canada safely[/url] [url=http://buyprednisolone.boutique/]prednisolone sod[/url]
JasonCounk · August 11, 2022 at 3:50 pm
[url=https://viagractab.monster/]viagra in usa online[/url]
Jameseloro · August 11, 2022 at 4:00 pm
[url=http://albenza.shop/]albenza 200 mg coupon[/url] [url=http://drugstore.email/]foreign pharmacy online[/url] [url=http://albenza.golf/]albendazole tablet[/url] [url=http://viagrastab.quest/]how to buy generic viagra from canada[/url] [url=http://viagraetabs.quest/]buy sildenafil 100mg online price[/url] [url=http://buyrobaxin.shop/]robaxin 500 mg tablet[/url] [url=http://xenical.digital/]orlistat canadian pharmacy[/url]
JosephMaict · August 11, 2022 at 4:03 pm
[url=https://buyrobaxin.shop/]where can i buy robaxin in canada[/url] [url=https://stromectol.digital/]stromectol cost[/url] [url=https://nexium.works/]can you buy nexium 40 mg over the counter[/url] [url=https://buymodafinil.guru/]buy modafinil uk india[/url] [url=https://buyprednisone.digital/]prednisone 20mg tab price[/url] [url=https://buycelebrex.boutique/]celebrex price south africa[/url]
Davidhup · August 11, 2022 at 4:16 pm
[url=https://synthroid.best/]synthroid 137 mcg coupon[/url]
MiaCounk · August 11, 2022 at 4:25 pm
[url=https://cialisitab.quest/]cheap cialis[/url]
JasonCounk · August 11, 2022 at 4:37 pm
[url=https://effexor.boutique/]effexor 2019[/url]
ZakCounk · August 11, 2022 at 4:38 pm
[url=https://cialisbtab.monster/]can you buy cialis without a prescription[/url] [url=https://acyclovir.directory/]generic zovirax ointment[/url] [url=https://pharmacyonline.guru/]austria pharmacy online[/url] [url=https://buysynthroid.monster/]0.05 mg synthroid[/url] [url=https://buylisinopril.digital/]lisinopril 10 mg 12.5mg[/url]
AmyCounk · August 11, 2022 at 4:38 pm
[url=http://buypropecia.works/]propecia discount[/url]
RodneyTab · August 11, 2022 at 4:51 pm
[url=http://xenical.digital/]orlistat over the counter[/url]
AnnaCounk · August 11, 2022 at 4:57 pm
[url=http://medrol.shop/]medrol 8[/url]
LisaCounk · August 11, 2022 at 5:12 pm
[url=https://viagrabtabs.quest/]viagra generic online pharmacy[/url]
Estebanguall · August 11, 2022 at 5:16 pm
[url=http://baclofen.digital/]baclofen over the counter uk[/url]
MichaelGuabe · August 11, 2022 at 5:25 pm
[url=https://nexium.works/]nexium tablets[/url]
Davidhup · August 11, 2022 at 5:29 pm
[url=https://kamagra.guru/]kamagra tablets for sale[/url]
JackCounk · August 11, 2022 at 5:46 pm
[url=http://fluoxetine.boutique/]prozac tablets[/url]
KimCounk · August 11, 2022 at 6:02 pm
[url=http://buyivermectin.boutique/]stromectol generic[/url]
EyeCounk · August 11, 2022 at 6:16 pm
[url=https://prednisolone.guru/]100mg prednisolone[/url] [url=https://buypropecia.works/]5mg propecia[/url] [url=https://lexapro.works/]lexapro in india[/url] [url=https://fluoxetine.digital/]prozac 30[/url] [url=https://buysuhagra.store/]suhagra 10 mg[/url] [url=https://viagraotab.monster/]order real viagra online[/url]
AmyCounk · August 11, 2022 at 6:19 pm
[url=http://viagraktabs.monster/]viagra 100 mg price in india[/url]
TommyHepsy · August 11, 2022 at 6:28 pm
[url=https://buymodafinil.guru/]provigil online purchase[/url]
IvyCounk · August 11, 2022 at 6:32 pm
[url=https://cialisbtab.monster/]cheap cialis 5mg australia[/url] [url=https://buystromectol.works/]stromectol over the counter[/url] [url=https://buyventolin.monster/]albuterol 1.25 mg[/url]
RodneyTab · August 11, 2022 at 6:40 pm
[url=http://cialisqtabs.quest/]buy tadalafil generic from canada[/url]
ElwoodGon · August 11, 2022 at 6:40 pm
[url=http://buyprednisone.works/]prescription prednisone cost[/url]
KiaCounk · August 11, 2022 at 6:41 pm
[url=https://neurontina.online/]buy gabapentin uk[/url]
MarkCounk · August 11, 2022 at 6:43 pm
[url=https://buyseroquel.boutique/]cost of seroquel 50 mg[/url]
MaryCounk · August 11, 2022 at 6:43 pm
[url=https://acyclovir.directory/]over the counter zovirax cream[/url] [url=https://buyatarax.works/]atarax medicine price[/url]
AmyCounk · August 11, 2022 at 6:47 pm
[url=http://cialisytabs.monster/]buy tadalafil 10mg india[/url]
JimCounk · August 11, 2022 at 6:50 pm
[url=http://viagrautabs.monster/]sildenafil medication[/url]
Jameseloro · August 11, 2022 at 6:55 pm
[url=http://buymodafinil.guru/]where to get provigil[/url] [url=http://viagraetabs.quest/]sildenafil generic for sale[/url] [url=http://cialisptabs.monster/]cialis 5mg price south africa[/url]
UgoCounk · August 11, 2022 at 6:55 pm
[url=http://ddrpill.com/]oder trazadone for sleeping[/url]
TedCounk · August 11, 2022 at 7:06 pm
[url=https://promethazine.store/]phenergan tablets otc[/url]
MichaelGuabe · August 11, 2022 at 7:06 pm
[url=https://buyneurontin.boutique/]gabapentin 300mg cap[/url]
DavisMug · August 11, 2022 at 7:07 pm
[url=http://viagragtabs.quest/]viagra 100 tablet[/url]
MiclTek · August 11, 2022 at 7:07 pm
[url=http://buymodafinil.guru/]order modafinil online australia[/url]
EvaCounk · August 11, 2022 at 7:11 pm
[url=http://buyprednisolone.boutique/]prednisolone tablet price[/url]
Samuelraisk · August 11, 2022 at 7:12 pm
[url=http://baclofen.digital/]baclofen 024[/url]
TedCounk · August 11, 2022 at 7:14 pm
[url=https://buypropecia.works/]propecia 1mg tablets uk[/url]
ElwoodGon · August 11, 2022 at 7:16 pm
[url=http://propranololtabs.online/]propranolol canada[/url]
RobertFoold · August 11, 2022 at 7:24 pm
[url=https://accutanetab.online/]accutane 5mg[/url]
Michaelemult · August 11, 2022 at 7:24 pm
[url=http://nexium.works/]esomeprazole nexium[/url]
WimCounk · August 11, 2022 at 7:33 pm
[url=http://ampicillin.digital/]ampicillin over the counter uk[/url]
EvaCounk · August 11, 2022 at 7:41 pm
[url=http://benicar.guru/]benicar in canada pharmacy[/url]
Davidhup · August 11, 2022 at 7:47 pm
[url=https://cialisxtab.monster/]tadalafil cialis[/url]
KimCounk · August 11, 2022 at 7:49 pm
[url=http://promethazine.store/]phenergan 25mg australia[/url]
RicIsose · August 11, 2022 at 7:56 pm
[url=https://albenza.golf/]albenza 200mg[/url] [url=https://paroxetine.boutique/]over the counter paroxetine[/url]
Charlesaduse · August 11, 2022 at 8:04 pm
[url=https://modafiniltab.online/]where to buy modafinil canada[/url]
AshCounk · August 11, 2022 at 8:04 pm
[url=https://motiliumdomperidone.monster/]buy motilium online australia[/url] [url=https://buyzanaflex.shop/]tizanidine brand name[/url]
JudyCounk · August 11, 2022 at 8:19 pm
[url=http://buycialis.digital/]cheap cialis for sale[/url]
Michaelemult · August 11, 2022 at 8:24 pm
[url=http://buyprednisone.works/]cheapist price for prednisone without prescription[/url]
ElwoodGon · August 11, 2022 at 8:36 pm
[url=http://xenical.digital/]orlistat pills for sale[/url]
MiclTek · August 11, 2022 at 8:43 pm
[url=http://viagraetabs.quest/]viagra triangle[/url]
LisaCounk · August 11, 2022 at 8:46 pm
[url=https://zofran.boutique/]can you buy zofran otc[/url]
MarkCounk · August 11, 2022 at 8:47 pm
[url=https://buyacyclovir.boutique/]zovirax 200mg tablets price[/url]
SueCounk · August 11, 2022 at 9:03 pm
[url=https://disulfiram.digital/]antabuse australia cost[/url]
JaneCounk · August 11, 2022 at 9:06 pm
[url=https://cialisitab.quest/]tadalafil daily uk[/url]
UgoCounk · August 11, 2022 at 9:07 pm
[url=http://viagraqtab.quest/]viagra canada order[/url]
DenCounk · August 11, 2022 at 9:12 pm
[url=https://hydrochlorothiazide.boutique/]50mg hydrochlorothiazide[/url]
MichaelDwego · August 11, 2022 at 9:17 pm
[url=https://propranolol.guru/]medicine inderal 40[/url]
EvaCounk · August 11, 2022 at 9:22 pm
[url=http://cialisbtab.monster/]order cialis online canada[/url]
EvaCounk · August 11, 2022 at 9:30 pm
[url=http://viagraotab.monster/]canadian brand viagra[/url]
TimothyThive · August 11, 2022 at 9:46 pm
[url=https://buyneurontin.boutique/]gabapentin 3 mg[/url]
SueCounk · August 11, 2022 at 9:59 pm
[url=https://buypropecia.works/]propecia 5mg uk[/url]
JasonCounk · August 11, 2022 at 10:00 pm
[url=https://pharmacyonline.guru/]reputable canadian pharmacy[/url]
RichardFaply · August 11, 2022 at 10:09 pm
[url=http://buygabapentin.store/]order gabapentin online[/url] [url=http://anafranil.boutique/]anafranil 25g[/url] [url=http://buyneurontin.boutique/]how much is gabapentin 300 mg[/url] [url=http://plavix.works/]plavix 75 mg price[/url] [url=http://kamagra.guru/]kamagra oral jelly uk sales[/url] [url=http://albuterol.directory/]albuterol uk[/url] [url=http://modafiniltab.online/]modafinil[/url]
AmyCounk · August 11, 2022 at 10:12 pm
[url=http://hydrochlorothiazide.boutique/]hydrochlorothiazide brand name uk[/url]
IvyCounk · August 11, 2022 at 10:26 pm
[url=https://valtrex.works/]valtrex in australia[/url] [url=https://buystromectol.works/]stromectol australia[/url] [url=https://cialisstab.monster/]buy cialis generic online[/url] [url=https://suhagra.store/]suhagra canada[/url] [url=https://cialisytabs.monster/]buy cialis for daily use online[/url] [url=https://albendazole.digital/]purchase albendazole[/url] [url=https://viagraotab.monster/]cheapest generic viagra online[/url] [url=https://vermoxtab.online/]where can i buy vermox over the counter[/url]
Davidhup · August 11, 2022 at 10:32 pm
[url=https://buyrobaxin.shop/]robaxin for sale online[/url]
MarkCounk · August 11, 2022 at 10:32 pm
[url=https://prednisone.works/]buy prednisone without a prescription[/url]
SueCounk · August 11, 2022 at 10:38 pm
[url=https://buyseroquel.boutique/]seroquel cost[/url]
Michaelemult · August 11, 2022 at 10:43 pm
[url=http://plavix.works/]clopidogrel brand name[/url]
Edgarlor · August 11, 2022 at 10:56 pm
[url=http://buystrattera.works/]strattera order online[/url]
JudyCounk · August 11, 2022 at 10:56 pm
[url=http://citalopram.boutique/]citalopram over the counter[/url]
AnnaCounk · August 11, 2022 at 10:58 pm
[url=http://buypropranolol.shop/]propranolol otc canada[/url]
EyeCounk · August 11, 2022 at 11:07 pm
[url=https://buylisinopril.digital/]zestril 10[/url] [url=https://buysuhagra.store/]suhagra 500[/url] [url=https://vermoxtab.online/]vermox 100mg price[/url] [url=https://viagraotab.monster/]female viagra pill cost[/url] [url=https://buyivermectin.boutique/]ivermectin over the counter[/url] [url=https://cialisytabs.monster/]tadalafil 5mg in india[/url]
EvaCounk · August 11, 2022 at 11:12 pm
[url=http://albendazole.digital/]albendazole canada pharmacy[/url]
JudyCounk · August 11, 2022 at 11:20 pm
[url=http://zofran.boutique/]zofran 4mg uk[/url]
NickCounk · August 11, 2022 at 11:22 pm
[url=http://buyseroquel.boutique/]seroquel 20 mg[/url]
Edgarlor · August 11, 2022 at 11:24 pm
[url=http://levaquin.shop/]buy generic levaquin[/url]
AmyCounk · August 11, 2022 at 11:39 pm
[url=http://silagra.guru/]silagra 100 mg sale[/url]
TimothyThive · August 11, 2022 at 11:49 pm
[url=https://paroxetine.boutique/]brand name paxil[/url]
TimothyThive · August 12, 2022 at 12:16 am
[url=https://cialisytab.monster/]buy cialis canada[/url]
DarrylSef · August 12, 2022 at 12:30 am
[url=http://baclofen.digital/]buy baclofen uk[/url] [url=http://buybenicar.works/]benicar prescription cost[/url] [url=http://buymodafinil.guru/]how to get modafinil uk[/url] [url=http://canadianpharmacy.boutique/]canadianpharmacyworld[/url] [url=http://synthroid.best/]synthroid 0.125 mg[/url] [url=http://buyprednisone.digital/]deltasone price[/url] [url=http://cialisatab.quest/]cialis 300mg[/url]
MiclTek · August 12, 2022 at 12:44 am
[url=http://propranololtabs.online/]inderal 10mg tab[/url]
AnnaCounk · August 12, 2022 at 12:52 am
[url=http://silagra.guru/]silagra 0.25[/url]
Curtisvibia · August 12, 2022 at 12:52 am
[url=https://buygabapentin.store/]neurontin 300 mg tablet[/url]
IvyCounk · August 12, 2022 at 12:54 am
[url=https://glucophage.digital/]2500 mg metformin[/url] [url=https://viagraotab.monster/]where can i buy viagra online in india[/url] [url=https://disulfiram.digital/]buy antebuse online 250 mg uk[/url] [url=https://viagractab.monster/]sildenafil 40 mg over the counter[/url] [url=https://buypropranolol.shop/]propranolol otc uk[/url] [url=https://buyseroquel.boutique/]seroquel xr drug[/url]
MiaCounk · August 12, 2022 at 12:54 am
[url=https://buypropranolol.shop/]propranolol 5 mg brand name[/url]
KimCounk · August 12, 2022 at 12:58 am
[url=http://vpxl.digital/]vpxl online[/url]
Samuelraisk · August 12, 2022 at 1:02 am
[url=http://albenza.shop/]albendazoleoverthecounter.com[/url]
TimothyThive · August 12, 2022 at 1:34 am
[url=https://viagrastab.quest/]60 mg viagra[/url]
SamCounk · August 12, 2022 at 1:40 am
[url=http://vermoxtab.online/]order vermox[/url] [url=http://buyivermectin.boutique/]ivermectin human[/url] [url=http://suhagra.store/]suhagra buy online[/url] [url=http://buypropranolol.shop/]propranolol usa[/url] [url=http://buyprednisolone.boutique/]prednisolone for sale uk[/url] [url=http://hydrochlorothiazide.boutique/]hydrochlorothiazide 25 mg tab tablet[/url] [url=http://acyclovir.directory/]buy zovirax usa[/url]
JosephMaict · August 12, 2022 at 1:43 am
[url=https://cialisqtabs.quest/]cialis 5mg daily canada[/url] [url=https://levaquin.shop/]levaquin medicine[/url] [url=https://stromectol.digital/]price of ivermectin tablets[/url]
ZakCounk · August 12, 2022 at 1:51 am
[url=https://effexor.boutique/]effexor xr 75[/url] [url=https://citalopram.boutique/]citalopram 0.5 mg[/url] [url=https://albendazole.digital/]albendazole brand name price[/url] [url=https://lexapro.works/]100 mg lexapro[/url] [url=https://zofran.boutique/]buy zofran canada[/url] [url=https://buysuhagra.store/]suhagra 50 mg[/url] [url=https://viagraatab.quest/]sildenafil 5343[/url] [url=https://promethazine.store/]phenergan 25 mg[/url]
LisaCounk · August 12, 2022 at 2:26 am
[url=https://cialisitab.quest/]buy real cialis online[/url]
Charlesaduse · August 12, 2022 at 2:43 am
[url=https://buystrattera.works/]cheap strattera[/url]
WilliamWem · August 12, 2022 at 2:43 am
[url=https://viagrastab.quest/]where to buy real viagra[/url] [url=https://cialisxtab.monster/]cialis 40mg australia[/url] [url=https://baclofen.digital/]baclofen tablet generic[/url] [url=https://buyrobaxin.shop/]500 mg robaxin[/url] [url=https://albenza.shop/]buy albendazole 400 mg[/url]
JaneCounk · August 12, 2022 at 2:51 am
[url=https://acyclovir.directory/]where can i buy zovirax tablets[/url]
JackCounk · August 12, 2022 at 3:11 am
[url=http://celebrex.guru/]celebrex 100mg[/url]
AmyCounk · August 12, 2022 at 3:11 am
[url=http://viagraotab.monster/]viagra 25mg online[/url]
KimCounk · August 12, 2022 at 3:18 am
[url=http://buyventolin.monster/]can i buy ventolin over the counter in singapore[/url]
DarrylSef · August 12, 2022 at 3:19 am
[url=http://anafranil.boutique/]buy anafranil online uk[/url] [url=http://cialisjtabs.monster/]10mg cialis[/url] [url=http://gabapentintab.online/]gabapentin 30 mg capsules[/url] [url=http://buycelebrex.boutique/]celebrex 200 cost[/url] [url=http://buybenicar.works/]generic benicar hct[/url] [url=http://plavix.works/]clopidogrel price comparison[/url] [url=http://propranolol.guru/]inderal capsule[/url] [url=http://viagrattabs.monster/]generic viagra soft 100mg[/url]
MarkCounk · August 12, 2022 at 3:39 am
[url=https://fluoxetine.digital/]prozac online buy[/url]
JackCounk · August 12, 2022 at 3:51 am
[url=http://cialisbtab.monster/]cialis canada online pharmacy no prescription[/url]
EyeCounk · August 12, 2022 at 4:03 am
[url=https://citalopram.boutique/]20 mg citalopram[/url] [url=https://buypropranolol.shop/]propranolol otc[/url] [url=https://cialisytabs.monster/]where to buy cialis without a prescription[/url] [url=https://buyacyclovir.boutique/]zovirax tablet 400 mg[/url]
RicIsose · August 12, 2022 at 4:16 am
[url=https://viagragtabs.quest/]best viagra brand[/url] [url=https://ventolin.guru/]proventil inhaler for sale[/url]
Samuelraisk · August 12, 2022 at 4:17 am
[url=http://anafranil.boutique/]buy anafranil 25mg[/url]
ElwoodGon · August 12, 2022 at 4:18 am
[url=http://cialisytab.monster/]where to buy generic cialis safely[/url]
MarkCounk · August 12, 2022 at 4:28 am
[url=https://cialisitab.quest/]tadalafil otc usa[/url]
JaneCounk · August 12, 2022 at 4:28 am
[url=https://benicar.guru/]benicar 20 mg generic[/url]
EyeCounk · August 12, 2022 at 4:34 am
[url=https://celebrex.guru/]celebrex pharmacy[/url] [url=https://buysynthroid.monster/]synthroid cost usa[/url] [url=https://buyivermectin.boutique/]how to get ivermectin[/url]
Edgarlor · August 12, 2022 at 4:38 am
[url=http://buyrobaxin.shop/]robaxin over the counter canada[/url]
Jameseloro · August 12, 2022 at 4:50 am
[url=http://buyprednisone.digital/]prednisone 20 mg price india[/url] [url=http://cymbalta.sale/]best price for cymbalta 60mg[/url] [url=http://viagrattabs.monster/]viagraonlineusa[/url] [url=http://drugstore.email/]pharmacy online 365 discount code[/url] [url=http://cialisvtab.quest/]buy cialis india pharmacy[/url] [url=http://buyprednisone.works/]cost of prednisone tablets[/url]
KiaCounk · August 12, 2022 at 4:57 am
[url=https://fluoxetine.digital/]prozac 20mg capsule price[/url]
ElwoodGon · August 12, 2022 at 5:02 am
[url=http://viagrastab.quest/]where can i buy female viagra pill[/url]
IvyCounk · August 12, 2022 at 5:13 am
[url=https://fluoxetine.boutique/]prozac medication[/url] [url=https://viagraktabs.monster/]sildenafil 10 mg tablet[/url] [url=https://celebrex.guru/]celebrex generic brand[/url] [url=https://zofran.boutique/]zofran 4[/url] [url=https://vermoxtab.online/]vermox tablet price in india[/url] [url=https://viagractab.monster/]buy cheap viagra online without prescription[/url] [url=https://hydrochlorothiazide.boutique/]purchase hydrochlorothiazide online[/url] [url=https://buyprednisolone.boutique/]100mg prednisolone[/url]
MiclTek · August 12, 2022 at 5:15 am
[url=http://ventolin.guru/]ventolin hfa[/url]
SamCounk · August 12, 2022 at 5:18 am
[url=http://prednisolone.guru/]prednisolone 15 mg[/url] [url=http://buyventolin.monster/]ventolin 4mg tablet[/url] [url=http://albendazole.digital/]albendazole medication[/url] [url=http://viagraftabs.monster/]viagra pill otc[/url] [url=http://viagraktabs.monster/]where to buy cheap viagra[/url] [url=http://viagractab.monster/]viagra from india[/url] [url=http://citalopram.boutique/]celexa pill price[/url] [url=http://acyclovir.directory/]zovirax singapore pharmacy[/url]
AlanCounk · August 12, 2022 at 5:20 am
[url=http://citalopram.boutique/]celexa 25mg pharmacy[/url] [url=http://buysuhagra.store/]buy suhagra 100[/url]
Michaeldrist · August 12, 2022 at 5:38 am
[url=http://cialisqtabs.quest/]cialis 50[/url]
IvyCounk · August 12, 2022 at 5:39 am
[url=https://prednisone.works/]apo-prednisone[/url] [url=https://buypropranolol.shop/]inderal canada[/url] [url=https://viagraktabs.monster/]female viagra cheap[/url] [url=https://prednisolone.guru/]prednisolone buy usa[/url]
WimCounk · August 12, 2022 at 5:40 am
[url=http://diflucan.directory/]diflucan otc canada[/url]
MichaelGuabe · August 12, 2022 at 5:42 am
[url=https://buycelebrex.boutique/]celebrex 100mg mexico[/url]
ZakCounk · August 12, 2022 at 5:57 am
[url=https://cialisstab.monster/]buy cialis 10mg[/url] [url=https://vermoxtab.online/]vermox usa[/url] [url=https://fluoxetine.digital/]fluoxetine canada[/url] [url=https://vpxl.digital/]vpxl for sale[/url] [url=https://buyseroquel.boutique/]buying seroquel online[/url] [url=https://celebrex.guru/]celebrex medicine generic[/url]
WimCounk · August 12, 2022 at 6:00 am
[url=http://hydroxychloroquine.guru/]plaquenil canada[/url]
ElwoodGon · August 12, 2022 at 6:06 am
[url=http://buyprednisone.works/]medication prednisone 10mg[/url]
UgoCounk · August 12, 2022 at 6:07 am
[url=http://buyneurontin.guru/]buy gabapentin 800 mg[/url]
DenCounk · August 12, 2022 at 6:09 am
[url=https://viagraftabs.monster/]where can i buy sildenafil[/url]
TedCounk · August 12, 2022 at 6:09 am
[url=https://viagractab.monster/]viagra pill otc[/url]
WilliamWem · August 12, 2022 at 6:14 am
[url=https://viagragtabs.quest/]buy viagra online canada with mastercard[/url] [url=https://synthroid.best/]synthoid[/url]
MarvinZem · August 12, 2022 at 6:30 am
[url=https://kamagra.guru/]kamagra jelly buy online india[/url]
AmyCounk · August 12, 2022 at 6:32 am
[url=http://medrol.shop/]medrol online[/url]
YonCounk · August 12, 2022 at 6:37 am
[url=https://viagractab.monster/]generic viagra online purchase[/url]
DavisMug · August 12, 2022 at 6:38 am
[url=http://viagragtabs.quest/]generic sildenafil 50mg[/url]
TommyHepsy · August 12, 2022 at 6:41 am
[url=https://cialisytab.monster/]cost cialis canada[/url]
DavisMug · August 12, 2022 at 6:42 am
[url=http://buybenicar.works/]benicar 40 mg tablet[/url]
Estebanguall · August 12, 2022 at 6:45 am
[url=http://neurontin.boutique/]purchase neurontin online[/url]
JoeCounk · August 12, 2022 at 6:59 am
[url=http://buycymbalta.digital/]cymbalta 40 mg[/url] [url=http://viagrabtabs.quest/]canadian pharmacy viagra mastercard[/url]
Charlesaduse · August 12, 2022 at 7:02 am
[url=https://clopidogrel.works/]plavix medicine[/url]
MiclTek · August 12, 2022 at 7:04 am
[url=http://buygabapentin.store/]neurontin 300 mg pill[/url]
Michaelemult · August 12, 2022 at 7:23 am
[url=http://viagrastab.quest/]sildenafil products[/url]
MaryCounk · August 12, 2022 at 7:26 am
[url=https://buycymbalta.digital/]cymbalta 30mg tab[/url] [url=https://viagrabtabs.quest/]viagra 100 buy[/url] [url=https://cialisbtab.monster/]buy tadalafil in usa[/url] [url=https://citalopram.boutique/]celexa 10 mg tablet[/url]
MiclTek · August 12, 2022 at 7:31 am
[url=http://clopidogrel.works/]clopidogrel price uk[/url]
UgoCounk · August 12, 2022 at 7:31 am
[url=http://buylanoxin.boutique/]digoxin oral[/url]
MarkCounk · August 12, 2022 at 7:31 am
[url=https://albendazole.digital/]albendazole tablets 200 mg[/url]
JudyCounk · August 12, 2022 at 7:32 am
[url=http://acyclovir.directory/]drug acyclovir[/url]
MiaCounk · August 12, 2022 at 7:50 am
[url=https://buypropranolol.shop/]inderal 40 cost[/url]
YonCounk · August 12, 2022 at 7:59 am
[url=https://buyacyclovir.boutique/]zovirax 800 mg price[/url]
AshCounk · August 12, 2022 at 8:03 am
[url=https://celecoxib.shop/]celebrex uk[/url] [url=https://tretinoin.boutique/]retin a canada[/url] [url=https://neurontin.digital/]gabapentin 60 mg[/url] [url=https://metoprolol.online/]lopressor 150 mg[/url]
TeoCounk · August 12, 2022 at 8:06 am
[url=https://zofran.boutique/]zofran 4 mg[/url]
ElwoodGon · August 12, 2022 at 8:06 am
[url=http://plavix.works/]cost of generic clopidogrel[/url]
DenCounk · August 12, 2022 at 8:13 am
[url=https://suhagra.store/]suhagra 100mg price in india[/url]
Edgarlor · August 12, 2022 at 8:19 am
[url=http://buybenicar.works/]where can i buy benicar[/url]
AnnaCounk · August 12, 2022 at 8:20 am
[url=http://buypropecia.works/]finasteride for sale[/url]
JasonCounk · August 12, 2022 at 8:27 am
[url=https://neurontina.online/]neurontin medication[/url]
AnnaCounk · August 12, 2022 at 8:31 am
[url=http://buycialis.digital/]tadalafil 25 mg capsule[/url]
ElwoodGon · August 12, 2022 at 8:33 am
[url=http://pharmacy.golf/]northern pharmacy[/url]
Charlesaduse · August 12, 2022 at 8:34 am
[url=https://synthroid.best/]how can i get synthroid cheap[/url]
EyeCounk · August 12, 2022 at 8:39 am
[url=https://citalopram.boutique/]citalopram hbr tabs[/url] [url=https://cialisbtab.monster/]cialis canada for sale[/url] [url=https://buycymbalta.digital/]purchase cymbalta online[/url] [url=https://viagraktabs.monster/]real viagra for sale[/url] [url=https://prednisone.works/]can you purchase prednisone for dogs without a prescription[/url] [url=https://buyventolin.monster/]albuterol inhaler price[/url] [url=https://cialisstab.monster/]cialis 5 mg tablet generic[/url]
RobertFoold · August 12, 2022 at 8:46 am
[url=https://drugstore.email/]trusted online pharmacy[/url]
MiaCounk · August 12, 2022 at 8:49 am
[url=https://neurontina.online/]neurontin 800[/url]
ZakCounk · August 12, 2022 at 9:04 am
[url=https://buystromectol.works/]ivermectin canada[/url] [url=https://buyseroquel.boutique/]is there a generic for seroquel xr[/url] [url=https://viagractab.monster/]buy sildenafil with visa[/url] [url=https://buysuhagra.store/]buy suhagra[/url] [url=https://glucophage.digital/]how to get metformin without prescription[/url]
Curtisvibia · August 12, 2022 at 9:06 am
[url=https://cialisxtab.monster/]tadalafil buy online india[/url]
JimCounk · August 12, 2022 at 9:09 am
[url=http://zofran.boutique/]zofran pill cost[/url]
RichardFaply · August 12, 2022 at 9:19 am
[url=http://buyprednisone.digital/]prednisone 15 mg daily[/url] [url=http://neurontin.boutique/]gabapentin 40 mg[/url] [url=http://drugstore.email/]online pharmacy china[/url] [url=http://viagraktab.quest/]buy viagra discover card[/url]
Michaelemult · August 12, 2022 at 9:48 am
[url=http://nexium.works/]cost of nexium[/url]
MarkCounk · August 12, 2022 at 9:53 am
[url=https://buyivermectin.boutique/]buy stromectol online[/url]
TimothyThive · August 12, 2022 at 10:12 am
[url=https://cialisqtabs.quest/]cheap tadalafil 5mg[/url]
Michaelemult · August 12, 2022 at 10:24 am
[url=http://neurontin.boutique/]neurontin 200[/url]
WimCounk · August 12, 2022 at 10:30 am
[url=http://vermox.email/]can i buy vermox over the counter[/url]
JaneCounk · August 12, 2022 at 10:35 am
[url=https://viagrautabs.monster/]generic viagra online canadian pharmacy[/url]
EyeCounk · August 12, 2022 at 10:46 am
[url=https://valtrex.works/]valtrex 1 mg[/url] [url=https://suhagra.store/]suhagra 100 online in india[/url] [url=https://buyseroquel.boutique/]seroquel pill 100 mg[/url] [url=https://buylisinopril.digital/]lisinopril online purchase[/url] [url=https://buyacyclovir.boutique/]acyclovir cream to united states[/url]
JoeCounk · August 12, 2022 at 10:56 am
[url=http://viagraktabs.monster/]viagra singapore[/url] [url=http://viagrabtabs.quest/]buy viagra online australia paypal[/url] [url=http://glucophage.digital/]order metformin online uk[/url] [url=http://vermoxtab.online/]can you buy vermox over the counter[/url] [url=http://viagraatab.quest/]female viagra cheap[/url]
MichaelGuabe · August 12, 2022 at 11:09 am
[url=https://cialisjtabs.monster/]best generic cialis prices[/url]
AlanCounk · August 12, 2022 at 11:11 am
[url=http://cialisbtab.monster/]where to buy real cialis online[/url] [url=http://viagradtab.quest/]sildenafil 20 mg pharmacy[/url]
MaryCounk · August 12, 2022 at 11:19 am
[url=https://viagradtab.quest/]sildenafil tablets online in india[/url] [url=https://viagraktabs.monster/]canadian viagra paypal[/url]
Michaelemult · August 12, 2022 at 11:50 am
[url=http://levaquin.shop/]ebaylevaquin[/url]
PaulCounk · August 12, 2022 at 11:53 am
[url=https://vpxl.digital/]vpxl pills cheap[/url]
WimCounk · August 12, 2022 at 11:54 am
[url=http://lopressormetoprolol.quest/]lopressor iv to po conversion[/url]
MiaCounk · August 12, 2022 at 11:59 am
[url=https://albendazole.digital/]albendazole tablets 400 mg price in india[/url]
MichaelGuabe · August 12, 2022 at 12:00 pm
[url=https://cialisqtabs.quest/]cialis cheap india[/url]
JaneCounk · August 12, 2022 at 12:02 pm
[url=https://valtrex.works/]generic for valtrex[/url]
Davidhup · August 12, 2022 at 12:08 pm
[url=https://stromectol.digital/]buy ivermectin canada[/url]
Curtisvibia · August 12, 2022 at 12:11 pm
[url=https://albenza.golf/]where to get albendazole[/url]
MaryCounk · August 12, 2022 at 12:45 pm
[url=https://fluoxetine.boutique/]fluoxetine australia[/url] [url=https://pharmacyonline.guru/]canadian pharmacy no prescription[/url] [url=https://viagraktabs.monster/]cheap viagra uk paypal[/url] [url=https://valtrex.works/]buy valtrex online[/url]
WimCounk · August 12, 2022 at 12:52 pm
[url=http://buyamoxicillin.monster/]can i buy augmentin over the counter[/url]
MichaelDwego · August 12, 2022 at 1:00 pm
[url=https://drugstore.email/]online pharmacy worldwide shipping[/url]
Michaelemult · August 12, 2022 at 1:03 pm
[url=http://viagragtabs.quest/]buy sildenafil 100mg online comparison[/url]
JoeCounk · August 12, 2022 at 1:24 pm
[url=http://neurontina.online/]neurontin medication[/url] [url=http://silagra.guru/]buy silagra online in india[/url] [url=http://buysuhagra.store/]suhagra 100 online buy[/url] [url=http://viagrautabs.monster/]price of sildenafil 50 mg[/url] [url=http://buysynthroid.monster/]synthroid 175 mcg[/url] [url=http://pharmacyonline.guru/]reputable online pharmacy[/url]
AshCounk · August 12, 2022 at 1:25 pm
[url=https://albendazole.guru/]buy albendazole medicine[/url] [url=https://retina.works/]009 tretinoin[/url] [url=https://vermoxmebendazole.store/]order vermox online canada[/url] [url=https://synthroid.agency/]synthroid 175 mcg price[/url] [url=https://buyzestoretic.com/]zestoretic generic[/url] [url=https://propranolol.shop/]propranolol purchase online[/url] [url=https://augmentin.email/]augmentin 625[/url] [url=https://buytadacip.monster/]buy tadacip from india[/url]
CarlCounk · August 12, 2022 at 1:32 pm
[url=http://viagraftabs.monster/]can you buy viagra over the counter in mexico[/url]
Jameseloro · August 12, 2022 at 1:33 pm
[url=http://xenical.digital/]orlistat 120 mg generic[/url] [url=http://cialisjtabs.monster/]canadian price for cialis[/url] [url=http://buylisinopril.guru/]zestril drug[/url] [url=http://buyneurontin.boutique/]gabapentin 400 mg coupon[/url]
EvaCounk · August 12, 2022 at 1:36 pm
[url=http://silagra.guru/]cheap silagra[/url]
SamCounk · August 12, 2022 at 1:43 pm
[url=http://viagractab.monster/]viagra 25mg online india[/url] [url=http://prednisolone.guru/]prednisolone best price[/url] [url=http://cialisytabs.monster/]buy cialis europe[/url] [url=http://disulfiram.digital/]disulfiram price in india[/url] [url=http://viagraotab.monster/]viagra generic viagra[/url]
DarrylSef · August 12, 2022 at 1:48 pm
[url=http://viagraetabs.quest/]generic viagra lowest prices[/url] [url=http://buyfinasteride.works/]order propecia uk[/url] [url=http://viagraktab.quest/]how to buy generic viagra in canada[/url] [url=http://neurontintab.online/]generic neurontin cost[/url] [url=http://propranololtabs.online/]innopran xl without prescription[/url] [url=http://viagrattabs.monster/]buy viagra online australia fast delivery[/url] [url=http://drugstore.email/]legit non prescription pharmacies[/url] [url=http://buylisinopril.guru/]90 lisinopril[/url]
AnnaCounk · August 12, 2022 at 1:51 pm
[url=http://viagraftabs.monster/]viagra uk fast delivery[/url]
JasonCounk · August 12, 2022 at 1:56 pm
[url=https://prednisone.works/]buy prendesone without a prescription[/url]
BooCounk · August 12, 2022 at 1:59 pm
[url=https://motrin.quest/]motrin pills price[/url]
EvaCounk · August 12, 2022 at 2:01 pm
[url=http://prednisolone.guru/]can i buy prednisolone over the counter in uk[/url]
SueCounk · August 12, 2022 at 2:03 pm
[url=https://suhagra.store/]suhagra tablet online[/url]
CarlCounk · August 12, 2022 at 2:11 pm
[url=http://prednisolone.guru/]prednisolone uk buy[/url]
EyeCounk · August 12, 2022 at 2:21 pm
[url=https://viagradtab.quest/]sildenafil india pharmacy[/url] [url=https://viagrabtabs.quest/]generic drug for viagra[/url] [url=https://viagraftabs.monster/]viagra cost australia[/url]
Jameseloro · August 12, 2022 at 2:25 pm
[url=http://canadianpharmacy.boutique/]best online foreign pharmacies[/url] [url=http://viagrattabs.monster/]sildenafil 5 mg price[/url]
WilliamWem · August 12, 2022 at 2:50 pm
[url=https://nexium.works/]nexium generic south africa[/url] [url=https://cialisytab.monster/]cialis gel uk[/url] [url=https://xenical.digital/]buy xenical otc[/url] [url=https://synthroid.best/]synthroid capsules[/url] [url=https://modafiniltab.online/]provigil over the counter[/url] [url=https://cymbalta.sale/]generic 39 mg cymbalta[/url] [url=https://buybenicar.works/]buy benicar[/url] [url=https://buyprednisone.works/]medicine prednisone 20mg tablets[/url]
MichaelDwego · August 12, 2022 at 3:00 pm
[url=https://plavix.works/]clopidogrel uk[/url]
JasonCounk · August 12, 2022 at 3:24 pm
[url=https://cialisitab.quest/]how to purchase cialis[/url]
SueCounk · August 12, 2022 at 3:35 pm
[url=https://viagractab.monster/]real viagra uk[/url]
Estebanguall · August 12, 2022 at 3:39 pm
[url=http://levaquin.shop/]levaquin 750[/url]
Michaeldrist · August 12, 2022 at 3:40 pm
[url=http://anafranil.boutique/]anafranil for sale[/url]
AmyCounk · August 12, 2022 at 3:54 pm
[url=http://viagradtab.quest/]can i buy viagra in usa[/url]
SueCounk · August 12, 2022 at 4:07 pm
[url=https://valtrex.works/]valtrex 1000 mg daily[/url]
Estebanguall · August 12, 2022 at 4:10 pm
[url=http://buyrobaxin.shop/]buy robaxin uk[/url]
RichardFaply · August 12, 2022 at 4:26 pm
[url=http://baclofen.digital/]buy baclofen[/url] [url=http://anafranil.boutique/]anafranil drug prices[/url]
SueCounk · August 12, 2022 at 4:55 pm
[url=https://fluoxetine.boutique/]no prescription fluoxetine[/url]
MichaelGuabe · August 12, 2022 at 4:56 pm
[url=https://levaquin.shop/]ebaylevaquin[/url]
JudyCounk · August 12, 2022 at 4:57 pm
[url=http://viagradtab.quest/]buy real viagra online india[/url]
SamCounk · August 12, 2022 at 4:59 pm
[url=http://buycialis.digital/]generic cialis from uk[/url] [url=http://hydrochlorothiazide.boutique/]cost of hydrochlorothiazide 25mg[/url] [url=http://buyacyclovir.boutique/]acyclovir cost canada[/url]
BooCounk · August 12, 2022 at 5:04 pm
[url=https://atrazodone.com/]30 trazodone 50 mg[/url]
JudyCounk · August 12, 2022 at 5:11 pm
[url=http://celebrex.guru/]generic celebrex 200mg[/url]
IvyCounk · August 12, 2022 at 5:16 pm
[url=https://fluoxetine.boutique/]fluoxetine 40 mg capsule price[/url] [url=https://neurontina.online/]cost of gabapentin 100mg[/url]
Jameseloro · August 12, 2022 at 5:17 pm
[url=http://nexium.works/]discount nexium online[/url] [url=http://buyneurontin.boutique/]gabapentin 1000mg tablet[/url]
DavisMug · August 12, 2022 at 5:20 pm
[url=http://ventolin.guru/]ventolin order online without prescription[/url]
WilliamWem · August 12, 2022 at 5:26 pm
[url=https://albuterol.directory/]albuterol 90 mcg cost[/url] [url=https://canadianpharmacy.boutique/]affordable pharmacy[/url] [url=https://buyprednisone.digital/]prednisone india[/url] [url=https://viagragtabs.quest/]buy viagra sale[/url] [url=https://synthroid.best/]112 mg synthroid[/url] [url=https://viagrastab.quest/]100mg viagra cost[/url]
MarkCounk · August 12, 2022 at 5:34 pm
[url=https://fluoxetine.boutique/]fluoxetine 40 mg tablets[/url]
Jameseloro · August 12, 2022 at 5:34 pm
[url=http://modafiniltab.online/]modafinil 200 mg tablet price[/url] [url=http://viagrastab.quest/]buy cheap viagra in usa[/url] [url=http://drugstore.email/]legitimate online pharmacy uk[/url] [url=http://viagraetabs.quest/]buy viagra in india online[/url] [url=http://buygabapentin.store/]neurontin 1200 mg[/url] [url=http://cialisxtab.monster/]cialis tablets for sale[/url]
MarkCounk · August 12, 2022 at 5:36 pm
[url=https://buystromectol.works/]stromectol[/url]
Jameseloro · August 12, 2022 at 5:41 pm
[url=http://anafranil.boutique/]anafranil 10 mg tab[/url] [url=http://viagraktab.quest/]can you buy over the counter viagra[/url] [url=http://ventolin.guru/]albuterol prescription coupon[/url] [url=http://stromectol.digital/]stromectol generic[/url] [url=http://viagragtabs.quest/]generic otc viagra[/url] [url=http://gabapentintab.online/]neurontin 600 mg price[/url] [url=http://modafiniltab.online/]where to get provigil[/url] [url=http://drugstore.email/]canadian pharmacies compare[/url]
AlanCounk · August 12, 2022 at 5:42 pm
[url=http://buypropecia.works/]finasteride uk price[/url] [url=http://buysuhagra.store/]suhagra 50 online[/url] [url=http://viagrautabs.monster/]viagra for sale online in canada[/url] [url=http://silagra.guru/]silagra pills[/url]
CarlCounk · August 12, 2022 at 5:43 pm
[url=http://buyprednisolone.boutique/]prednisolone 1 cost[/url]
Samuelraisk · August 12, 2022 at 6:01 pm
[url=http://anafranil.boutique/]anafranil for anxiety[/url]
Edgarlor · August 12, 2022 at 6:07 pm
[url=http://gabapentintab.online/]neurontin for sale online[/url]
DarrylSef · August 12, 2022 at 6:10 pm
[url=http://gabapentintab.online/]2700 mg gabapentin[/url] [url=http://anafranil.boutique/]anafranil 25[/url] [url=http://viagrattabs.monster/]buy female viagra tablet in india[/url] [url=http://canadianpharmacy.boutique/]online pharmacy china[/url]
Davidhup · August 12, 2022 at 6:11 pm
[url=https://buyprednisone.digital/]order prednisone 100g online without prescription[/url]
YonCounk · August 12, 2022 at 6:12 pm
[url=https://buyivermectin.boutique/]ivermectin prescription[/url]
WilliamWem · August 12, 2022 at 6:13 pm
[url=https://neurontintab.online/]gabapentin 75 mg[/url] [url=https://viagrastab.quest/]where can i find viagra[/url]
DavisMug · August 12, 2022 at 6:16 pm
[url=http://drugstore.email/]uk pharmacy[/url]
MichaelGuabe · August 12, 2022 at 6:16 pm
[url=https://propranolol.guru/]inderal 60 mg capsule[/url]
Curtisvibia · August 12, 2022 at 6:23 pm
[url=https://ventolin.guru/]albuterol 2mg capsules[/url]
JaneCounk · August 12, 2022 at 6:24 pm
[url=https://buysynthroid.monster/]buy 200 mcg synthroid online[/url]
TimothyThive · August 12, 2022 at 6:27 pm
[url=https://clopidogrel.works/]plavix brand name[/url]
MiclTek · August 12, 2022 at 6:29 pm
[url=http://albuterol.directory/]albuterol medicine in india[/url]
JosephMaict · August 12, 2022 at 6:34 pm
[url=https://buyprednisone.digital/]deltasone 20 mg[/url] [url=https://propranololtabs.online/]can i buy propranolol over the counter[/url] [url=https://cialisxtab.monster/]generic cialis online pharmacy canada[/url] [url=https://neurontintab.online/]neurontin 200 mg[/url] [url=https://viagraktab.quest/]medication viagra online[/url] [url=https://buygabapentin.store/]where can i buy gabapentin online[/url] [url=https://propranolol.guru/]how much is propranolol cost[/url]
Michaeldrist · August 12, 2022 at 6:37 pm
[url=http://accutanetab.online/]accutane 40 mg capsule[/url]
JaneCounk · August 12, 2022 at 6:53 pm
[url=https://buycymbalta.digital/]order cymbalta 60 mg online[/url]
RobertFoold · August 12, 2022 at 6:56 pm
[url=https://viagrastab.quest/]where can i buy viagra over the counter uk[/url]
IvyCounk · August 12, 2022 at 6:56 pm
[url=https://viagractab.monster/]us pharmacy viagra[/url] [url=https://promethazine.store/]phenergan 25mg australia[/url] [url=https://pharmacyonline.guru/]super saver pharmacy[/url] [url=https://acyclovir.directory/]purchase valicyclovir online[/url]
JackCounk · August 12, 2022 at 7:56 pm
[url=http://celebrex.guru/]celebrex.com[/url]
RicIsose · August 12, 2022 at 8:05 pm
[url=https://clopidogrel.works/]clopidogrel tab 75 mg pill[/url] [url=https://synthroid.best/]best price for synthroid[/url] [url=https://cymbalta.sale/]cymbalta 120[/url] [url=https://pharmacy.golf/]silkroad online pharmacy[/url] [url=https://buyclomid.works/]clomid tablets price in south africa[/url] [url=https://propranolol.guru/]propranolol 10mg cheap[/url] [url=https://viagraetabs.quest/]viagra over the counter europe[/url] [url=https://buylisinopril.guru/]zestril 20 mg price[/url]
WimCounk · August 12, 2022 at 8:05 pm
[url=http://aurogra.shop/]aurogra[/url]
IvyCounk · August 12, 2022 at 8:06 pm
[url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide capsules 12.5 mg[/url] [url=https://viagrabtabs.quest/]viagra over the counter[/url] [url=https://fluoxetine.digital/]prozac prescription[/url] [url=https://silagra.guru/]silagra canada[/url]
Samuelraisk · August 12, 2022 at 8:12 pm
[url=http://canadianpharmacy.boutique/]canadian pharmacies comparison[/url]
JasonCounk · August 12, 2022 at 8:14 pm
[url=https://citalopram.boutique/]2020 citalopram[/url]
Michaeldrist · August 12, 2022 at 8:20 pm
[url=http://buygabapentin.store/]gabapentin coupon[/url]
CarlCounk · August 12, 2022 at 8:27 pm
[url=http://fluoxetine.boutique/]medication fluoxetine[/url]
JaneCounk · August 12, 2022 at 8:29 pm
[url=https://buyprednisolone.boutique/]prednisolone 5mg without prescription[/url]
JasonCounk · August 12, 2022 at 8:30 pm
[url=https://buyseroquel.boutique/]seroquel 50mg cost[/url]
RodneyTab · August 12, 2022 at 8:32 pm
[url=http://ventolin.guru/]albuterol prescription online[/url]
Samuelraisk · August 12, 2022 at 8:42 pm
[url=http://viagraetabs.quest/]viagra online europe[/url]
TimothyThive · August 12, 2022 at 8:49 pm
[url=https://buyclomid.works/]clomid for sale online uk[/url]
Curtisvibia · August 12, 2022 at 9:00 pm
[url=https://viagraktab.quest/]order viagra online canada mastercard[/url]
IvyCounk · August 12, 2022 at 9:01 pm
[url=https://glucophage.digital/]order metformin online[/url] [url=https://effexor.boutique/]over the counter effexor[/url] [url=https://valtrex.works/]buy generic valtrex online cheap[/url] [url=https://viagraktabs.monster/]generic viagra 2019[/url] [url=https://cialisitab.quest/]cialis medication price[/url] [url=https://benicar.guru/]benicar 20mg prices[/url]
MarvinZem · August 12, 2022 at 9:07 pm
[url=https://buyfinasteride.works/]propecia online usa[/url]
Davidhup · August 12, 2022 at 9:08 pm
[url=https://levaquin.shop/]order levaquin online[/url]
RodneyTab · August 12, 2022 at 9:09 pm
[url=http://cialisjtabs.monster/]tadalafil 10 mg canada[/url]
Edgarlor · August 12, 2022 at 9:14 pm
[url=http://synthroid.best/]how to get synthroid without a prescription[/url]
Michaeldrist · August 12, 2022 at 9:23 pm
[url=http://plavix.works/]plavix generic[/url]
RicIsose · August 12, 2022 at 9:27 pm
[url=https://buyneurontin.boutique/]gabapentin 300 mg capsule price[/url] [url=https://cialisqtabs.quest/]buy cialis generic canada[/url] [url=https://ventolin.guru/]buy ventolin online australia[/url] [url=https://kamagra.guru/]kamagra pharmacy uk[/url]
MiaCounk · August 12, 2022 at 9:30 pm
[url=https://vermoxtab.online/]vermox 500mg price[/url]
ElwoodGon · August 12, 2022 at 9:38 pm
[url=http://buybenicar.works/]benicar canada pharmacy[/url]
KimCounk · August 12, 2022 at 9:39 pm
[url=http://hydrochlorothiazide.boutique/]how much is hydrochlorothiazide[/url]
ElwoodGon · August 12, 2022 at 10:12 pm
[url=http://buylisinopril.guru/]lisinopril 5 mg pill[/url]
Edgarlor · August 12, 2022 at 10:12 pm
[url=http://buyfinasteride.works/]cheap propecia[/url]
PaulCounk · August 12, 2022 at 10:19 pm
[url=https://fluoxetine.digital/]how much is fluoxetine uk[/url]
EvaCounk · August 12, 2022 at 10:21 pm
[url=http://viagrabtabs.quest/]cheap viagra generic canada[/url]
SueCounk · August 12, 2022 at 10:30 pm
[url=https://neurontina.online/]100mg gabapentin tablets[/url]
DavisMug · August 12, 2022 at 10:31 pm
[url=http://albuterol.directory/]how much is a ventolin[/url]
MaryCounk · August 12, 2022 at 10:34 pm
[url=https://buypropecia.works/]finasteride 5mg generic[/url] [url=https://buyseroquel.boutique/]seroquel price in india[/url] [url=https://prednisolone.guru/]where to buy prednisolone 5mg[/url] [url=https://buyacyclovir.boutique/]zovirax 200 mg capsule[/url] [url=https://pharmacyonline.guru/]pharmacy website india[/url] [url=https://viagraftabs.monster/]viagra online uk[/url] [url=https://celebrex.guru/]celebrex coupon[/url]
MiaCounk · August 12, 2022 at 10:53 pm
[url=https://glucophage.digital/]metformin tablets for sale[/url]
AlanCounk · August 12, 2022 at 10:55 pm
[url=http://buyatarax.works/]buy atarax online canada[/url] [url=http://viagrabtabs.quest/]generic india viagra[/url] [url=http://lexapro.works/]lexapro 50 mg price[/url]
JaneCounk · August 12, 2022 at 10:57 pm
[url=https://viagraftabs.monster/]how to get sildenafil[/url]
LisaCounk · August 12, 2022 at 11:07 pm
[url=https://silagra.guru/]silagra without prescription[/url]
Michaeldrist · August 12, 2022 at 11:15 pm
[url=http://levaquin.shop/]buy generic levaquin[/url]
AnnaCounk · August 12, 2022 at 11:20 pm
[url=http://viagraatab.quest/]canadian medicine viagra[/url]
ElwoodGon · August 12, 2022 at 11:20 pm
[url=http://viagraetabs.quest/]purchase generic viagra online[/url]
ZakCounk · August 12, 2022 at 11:21 pm
[url=https://buypropecia.works/]generic propecia finasteride[/url] [url=https://acyclovir.directory/]acyclovir otc canada[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide canada[/url]
DenCounk · August 12, 2022 at 11:43 pm
[url=https://neurontina.online/]buy gabapentin 100mg online uk[/url]
WilliamWem · August 12, 2022 at 11:48 pm
[url=https://buybenicar.works/]benicar from canada[/url] [url=https://propranololtabs.online/]propranolol capsules[/url] [url=https://buycelebrex.boutique/]celebrex costs in canada[/url] [url=https://cymbalta.sale/]cheapest price for generic cymbalta[/url] [url=https://viagraktab.quest/]buy viagra through paypal[/url] [url=https://pharmacy.golf/]pharmacy canadian superstore[/url] [url=https://viagragtabs.quest/]pharmacy viagra[/url]
KiaCounk · August 12, 2022 at 11:51 pm
[url=https://buysuhagra.store/]suhagra 50 mg online[/url]
WilliamWem · August 12, 2022 at 11:56 pm
[url=https://propranolol.guru/]buy propranolol 40 mg[/url] [url=https://accutanetab.online/]accutane price uk[/url] [url=https://cialisytab.monster/]generic cialis online europe[/url]
JosephMaict · August 13, 2022 at 12:09 am
[url=https://buygabapentin.store/]gabapentin 400 mg tablet[/url] [url=https://viagraktab.quest/]sildenafil pill 10 mg[/url] [url=https://canadianpharmacy.boutique/]no prescription needed canadian pharmacy[/url] [url=https://cialisqtabs.quest/]tadalafil india 10mg[/url] [url=https://cialisatab.quest/]tadalafil online[/url] [url=https://levaquin.shop/]buy generic levaquin[/url] [url=https://buybenicar.works/]benicar 10 mg tablets[/url]
MiclTek · August 13, 2022 at 12:14 am
[url=http://propranololtabs.online/]propranolol tablets buy online[/url]
YonCounk · August 13, 2022 at 12:39 am
[url=https://buysuhagra.store/]suhagra 25 mg price in india[/url]
DenCounk · August 13, 2022 at 12:48 am
[url=https://albendazole.digital/]albendazole cream[/url]
CarlCounk · August 13, 2022 at 12:50 am
[url=http://viagractab.monster/]how to get viagra in india[/url]
KimCounk · August 13, 2022 at 12:52 am
[url=http://citalopram.boutique/]celexa 60 mg cost[/url]
JoeCounk · August 13, 2022 at 1:07 am
[url=http://cialisitab.quest/]tadalafil 5mg uk[/url] [url=http://disulfiram.digital/]purchase antabuse online[/url] [url=http://cialisbtab.monster/]cialis online 40 mg[/url]
UgoCounk · August 13, 2022 at 1:08 am
[url=http://buycolchicine.shop/]colchicine lowest price[/url]
Curtisvibia · August 13, 2022 at 1:23 am
[url=https://viagrattabs.monster/]cost of sildenafil in canada[/url]
KiaCounk · August 13, 2022 at 1:27 am
[url=https://buypropecia.works/]how to get propecia[/url]
JackCounk · August 13, 2022 at 1:28 am
[url=http://viagradtab.quest/]sildenafil paypal[/url]
JaneCounk · August 13, 2022 at 1:46 am
[url=https://viagrabtabs.quest/]sildenafil medication cost[/url]
KiaCounk · August 13, 2022 at 1:49 am
[url=https://viagraotab.monster/]viagra pharmacy over the counter[/url]
JudyCounk · August 13, 2022 at 1:50 am
[url=http://effexor.boutique/]effexor purchase[/url]
DavisMug · August 13, 2022 at 2:18 am
[url=http://drugstore.email/]online pharmacy without prescription[/url]
Samuelraisk · August 13, 2022 at 2:21 am
[url=http://propranolol.guru/]propranolol price canada[/url]
DenCounk · August 13, 2022 at 2:21 am
[url=https://buyacyclovir.boutique/]buy valacyclovir online[/url]
MiclTek · August 13, 2022 at 2:47 am
[url=http://buygabapentin.store/]gabapentin 300mg buy online[/url]
JosephMaict · August 13, 2022 at 2:47 am
[url=https://buybenicar.works/]benicar hct coupons[/url] [url=https://cialisytab.monster/]can you buy cialis online[/url] [url=https://buyrobaxin.shop/]robaxin in usa[/url] [url=https://buystrattera.works/]strattera 80 mg capsule[/url] [url=https://synthroid.best/]synthroid online canada[/url] [url=https://albuterol.directory/]ventolin cost australia[/url]
JimCounk · August 13, 2022 at 2:50 am
[url=http://medrol.shop/]medrol price in uk[/url]
MarvinZem · August 13, 2022 at 2:51 am
[url=https://levaquin.shop/]antibiotic levaquin[/url]
JasonCounk · August 13, 2022 at 2:57 am
[url=https://buycialis.digital/]how to get cialis pills[/url]
MarvinZem · August 13, 2022 at 3:00 am
[url=https://buyclomid.works/]how much is clomid 50mg[/url]
TedCounk · August 13, 2022 at 3:16 am
[url=https://cialisitab.quest/]tadalafil 20mg for female[/url]
UgoCounk · August 13, 2022 at 3:22 am
[url=http://buynolvadex.shop/]nolvadex tablet price[/url]
MiclTek · August 13, 2022 at 3:28 am
[url=http://buyprednisone.works/]prednisone 200 mg[/url]
ZakCounk · August 13, 2022 at 3:28 am
[url=https://vpxl.digital/]vpxl without prescription[/url] [url=https://viagrautabs.monster/]viagra pro[/url] [url=https://buyacyclovir.boutique/]zovirax pills script[/url]
LisaCounk · August 13, 2022 at 3:36 am
[url=https://silagra.guru/]silagra 25 mg[/url]
Michaelemult · August 13, 2022 at 3:39 am
[url=http://buyfinasteride.works/]buy propecia australia[/url]
TeoCounk · August 13, 2022 at 3:56 am
[url=https://pharmacyonline.guru/]your pharmacy online[/url]
ElwoodGon · August 13, 2022 at 4:00 am
[url=http://buyprednisone.works/]prednizone for sale[/url]
JackCounk · August 13, 2022 at 4:01 am
[url=http://zofran.boutique/]zofran 4 mg tablet price[/url]
IvyCounk · August 13, 2022 at 4:06 am
[url=https://cialisytabs.monster/]india tadalafil capsule cheap[/url] [url=https://disulfiram.digital/]antabuse[/url] [url=https://buycialis.digital/]real cialis for sale online[/url] [url=https://buypropecia.works/]cheap propecia generic[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide otc[/url] [url=https://vermoxtab.online/]vermox australia online[/url]
RobertFoold · August 13, 2022 at 4:20 am
[url=https://anafranil.boutique/]anafranil price[/url]
JoeCounk · August 13, 2022 at 4:54 am
[url=http://viagrautabs.monster/]best viagra capsule[/url] [url=http://silagra.guru/]buy silagra 100 mg[/url]
Samuelraisk · August 13, 2022 at 5:05 am
[url=http://buybenicar.works/]benicar 20 mg online[/url]
ElwoodGon · August 13, 2022 at 5:11 am
[url=http://viagraetabs.quest/]how to order vigra on internet[/url]
RobertFoold · August 13, 2022 at 5:21 am
[url=https://buyprednisone.digital/]prednisone 20[/url]
WimCounk · August 13, 2022 at 5:27 am
[url=http://paxiltab.com/]paroxetine 2 5 mg[/url]
Edgarlor · August 13, 2022 at 5:32 am
[url=http://accutanetab.online/]accutane 20mg[/url]
Samuelraisk · August 13, 2022 at 5:32 am
[url=http://cialisqtabs.quest/]cialis online purchase in india[/url]
RodneyTab · August 13, 2022 at 5:34 am
[url=http://buyclomid.works/]where can i get clomid pills[/url]
AnnaCounk · August 13, 2022 at 5:47 am
[url=http://vermoxtab.online/]buy vermox uk[/url]
WimCounk · August 13, 2022 at 5:58 am
[url=http://propecia.shop/]propecia singapore price[/url]
JasonCounk · August 13, 2022 at 6:00 am
[url=https://buyprednisolone.boutique/]prednisolone 5mg tablet price in india[/url]
TedCounk · August 13, 2022 at 6:12 am
[url=https://buypropranolol.shop/]propanolol[/url]
JackCounk · August 13, 2022 at 6:13 am
[url=http://cialisytabs.monster/]tadalafil 24 mg[/url]
DenCounk · August 13, 2022 at 6:16 am
[url=https://hydrochlorothiazide.boutique/]price of hydrochlorothiazide[/url]
ElwoodGon · August 13, 2022 at 6:30 am
[url=http://pharmacy.golf/]script pharmacy[/url]
AmyCounk · August 13, 2022 at 6:40 am
[url=http://cialisbtab.monster/]cialis 20mg uk[/url]
Jameseloro · August 13, 2022 at 6:45 am
[url=http://viagrastab.quest/]viagra cost australia[/url] [url=http://cialisvtab.quest/]where to buy generic tadalafil[/url]
TedCounk · August 13, 2022 at 6:47 am
[url=https://buyprednisolone.boutique/]120mg prednisolone[/url]
IvyCounk · August 13, 2022 at 7:05 am
[url=https://viagradtab.quest/]sildenafil tablets 100mg india[/url] [url=https://effexor.boutique/]uk pharmacy online effexor[/url] [url=https://vermoxtab.online/]vermox mexico[/url] [url=https://glucophage.digital/]where to buy metformin online[/url] [url=https://viagraftabs.monster/]buy pfizer viagra[/url] [url=https://medrol.shop/]medrol 16 mg price[/url]
DavisMug · August 13, 2022 at 7:07 am
[url=http://buygabapentin.store/]gabapentin medication[/url]
ElwoodGon · August 13, 2022 at 7:08 am
[url=http://gabapentintab.online/]neurontin 800 mg capsules[/url]
SamCounk · August 13, 2022 at 7:16 am
[url=http://buypropranolol.shop/]propranolol cost australia[/url] [url=http://suhagra.store/]buy suhagra 50 mg online[/url]
NickCounk · August 13, 2022 at 7:19 am
[url=http://promethazine.store/]phenergan online canada[/url]
RodneyTab · August 13, 2022 at 7:21 am
[url=http://pharmacy.golf/]canada pharmacy online[/url]
RodneyTab · August 13, 2022 at 7:27 am
[url=http://buyclomid.works/]how much is clomid 100mg[/url]
Curtisvibia · August 13, 2022 at 7:47 am
[url=https://propranololtabs.online/]propranolol 160 mg coupon[/url]
SamCounk · August 13, 2022 at 7:47 am
[url=http://viagractab.monster/]female viagra online india[/url] [url=http://buycialis.digital/]cipla tadalafil[/url] [url=http://buysuhagra.store/]suhagra 50 mg[/url] [url=http://valtrex.works/]buy generic valtrex without a prescription[/url]
RicIsose · August 13, 2022 at 7:48 am
[url=https://viagrastab.quest/]best price generic viagra online[/url] [url=https://canadianpharmacy.boutique/]best online pharmacy india[/url] [url=https://accutanetab.online/]accutane pharmacy prices[/url]
AshCounk · August 13, 2022 at 7:58 am
[url=https://olmesartan.quest/]generic for benicar[/url] [url=https://atenolol.shop/]atenolol 100 mg buy[/url] [url=https://indocinindomethacin.quest/]indocin 25mg cap[/url] [url=https://prazosin.store/]prazosin 1 mg cap[/url] [url=https://sumycin365.com/]buy sumycin[/url] [url=https://erythromycin.store/]erythromycin 2 gel coupon[/url]
TommyHepsy · August 13, 2022 at 8:14 am
[url=https://cialisatab.quest/]us pharmacy prices for cialis[/url]
LisaCounk · August 13, 2022 at 8:31 am
[url=https://viagrabtabs.quest/]buy viagra price[/url]
MarvinZem · August 13, 2022 at 8:37 am
[url=https://ventolin.guru/]albuterol without a prescription[/url]
AshCounk · August 13, 2022 at 8:55 am
[url=https://sumycin.store/]tetracycline generic brand[/url] [url=https://zestoretic.shop/]zestoretic 20[/url] [url=https://clomid.boutique/]where to buy clomid in canada[/url] [url=https://tetracycline.boutique/]terramycin pfizer[/url] [url=https://trimox.today/]where to buy amoxicillin without a prescription[/url] [url=https://prednisolone.cfd/]prednisolone 5mg for sale[/url] [url=https://finpecia.monster/]finpecia online india[/url] [url=https://propranolol.works/]buy propranolol online india[/url]
RicIsose · August 13, 2022 at 9:00 am
[url=https://pharmacy.golf/]pharmacy drugs[/url] [url=https://buygabapentin.store/]buy gabapentin 100mg online uk[/url] [url=https://stromectol.digital/]stromectol 15 mg[/url] [url=https://albuterol.directory/]albuterol 1.5 mg[/url]
Samuelraisk · August 13, 2022 at 9:03 am
[url=http://propranolol.guru/]inderal buy online usa[/url]
AshCounk · August 13, 2022 at 9:06 am
[url=https://busparone.com/]buspar 20 mg[/url] [url=https://antabuse.directory/]disulfiram 500 mg tablet price[/url] [url=https://abilify.shop/]over the counter abilify[/url] [url=https://hydroxyzine.store/]atarax[/url] [url=https://buytadacip.monster/]buy tadacip online[/url] [url=https://buycipro.quest/]ciprofloxacin 100mg[/url] [url=https://erectafil.boutique/]erectafil online[/url]
PaulCounk · August 13, 2022 at 9:06 am
[url=https://buycymbalta.digital/]cymbalta 2019[/url]
AshCounk · August 13, 2022 at 9:10 am
[url=https://dyrenium.quest/]water pill triamterene hctz[/url] [url=https://propranolol.agency/]buy propranolol for anxiety[/url] [url=https://buyalbuterol.shop/]ventolin in usa[/url] [url=https://vardenafil.cyou/]vardenafil hcl[/url] [url=https://synthroid.company/]thyroid synthroid[/url] [url=https://benicar.works/]benicar medicine[/url] [url=https://zofran.guru/]zofran uk[/url]
SueCounk · August 13, 2022 at 9:23 am
[url=https://valtrex.works/]cheap valtrex[/url]
EvaCounk · August 13, 2022 at 9:48 am
[url=http://viagradtab.quest/]india viagra price[/url]
JudyCounk · August 13, 2022 at 9:54 am
[url=http://buycialis.digital/]cialis 20 mg in india[/url]
TommyHepsy · August 13, 2022 at 9:59 am
[url=https://albenza.shop/]albenza 200 mg tablet price[/url]
JoeCounk · August 13, 2022 at 10:00 am
[url=http://buysuhagra.store/]suhagra 50 mg price[/url] [url=http://viagraktabs.monster/]viagra discounts[/url] [url=http://buycialis.digital/]cialis otc uk[/url] [url=http://viagradtab.quest/]where can i buy over the counter viagra[/url] [url=http://viagraotab.monster/]viagra online sale in india[/url] [url=http://buypropecia.works/]propecia 5mg price[/url] [url=http://glucophage.digital/]metformin usa[/url] [url=http://viagraatab.quest/]viagra generic soft tab[/url]
SueCounk · August 13, 2022 at 10:15 am
[url=https://medrol.shop/]medrol 16mg price[/url]
AmyCounk · August 13, 2022 at 10:24 am
[url=http://suhagra.store/]suhagra tablet 50 mg[/url]
EvaCounk · August 13, 2022 at 10:33 am
[url=http://vpxl.digital/]vpxl[/url]
JasonCounk · August 13, 2022 at 10:34 am
[url=https://viagrabtabs.quest/]cheap viagra canadian pharmacy[/url]
CarlCounk · August 13, 2022 at 10:36 am
[url=http://fluoxetine.boutique/]prozac 5 mg capsules[/url]
DavisMug · August 13, 2022 at 10:37 am
[url=http://cialisatab.quest/]buy cialis 5mg online canada[/url]
SueCounk · August 13, 2022 at 10:37 am
[url=https://cialisytabs.monster/]5mg tadalafil from canada[/url]
EvaCounk · August 13, 2022 at 10:42 am
[url=http://cialisitab.quest/]generic tadalafil 5mg[/url]
MiclTek · August 13, 2022 at 10:58 am
[url=http://ventolin.guru/]albuterol no prescription[/url]
IvyCounk · August 13, 2022 at 11:08 am
[url=https://promethazine.store/]buy phenergan tablets[/url] [url=https://pharmacyonline.guru/]top 10 pharmacies in india[/url] [url=https://cialisitab.quest/]cheapest tadalafil 5mg[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide 12.5mg[/url] [url=https://fluoxetine.digital/]fluoxetine 60 mg capsules[/url] [url=https://suhagra.store/]suhagra 50 tablet[/url] [url=https://cialisstab.monster/]india pharmacy tadalafil[/url]
LisaCounk · August 13, 2022 at 11:09 am
[url=https://disulfiram.digital/]where to get antabuse[/url]
MarkCounk · August 13, 2022 at 11:31 am
[url=https://buyprednisolone.boutique/]prednisolone brand name india[/url]
JasonCounk · August 13, 2022 at 11:34 am
[url=https://viagraotab.monster/]viagra fast shipping[/url]
DenCounk · August 13, 2022 at 11:59 am
[url=https://fluoxetine.boutique/]fluoxetine 40mg capsules[/url]
CarlCounk · August 13, 2022 at 12:02 pm
[url=http://prednisolone.guru/]prednisolone 5 mg tablet rx[/url]
DarrylSef · August 13, 2022 at 12:02 pm
[url=http://cialisxtab.monster/]generic cialis 5mg canada[/url] [url=http://propranolol.guru/]propranolol prescription uk[/url] [url=http://viagrastab.quest/]best site to buy viagra[/url] [url=http://buycelebrex.boutique/]can you buy celebrex over the counter in canada[/url]
YonCounk · August 13, 2022 at 12:05 pm
[url=https://buycymbalta.digital/]cymbalta 2017[/url]
JoeCounk · August 13, 2022 at 12:28 pm
[url=http://buyventolin.monster/]albuterol tablets for sale[/url] [url=http://benicar.guru/]generic cost of benicar[/url] [url=http://effexor.boutique/]effexor generic cost[/url] [url=http://buyseroquel.boutique/]cost of seroquel[/url]
AmyCounk · August 13, 2022 at 12:30 pm
[url=http://buysynthroid.monster/]buy generic synthroid online[/url]
IvyCounk · August 13, 2022 at 12:51 pm
[url=https://viagrautabs.monster/]buy viagra pills online[/url] [url=https://buypropecia.works/]cost of propecia in india[/url] [url=https://promethazine.store/]cost of generic phenergan[/url] [url=https://viagrabtabs.quest/]buy viagra 50mg[/url] [url=https://disulfiram.digital/]disulfiram cost australia[/url] [url=https://cialisstab.monster/]cialis daily cheap[/url] [url=https://buyventolin.monster/]generic combivent[/url]
CarlCounk · August 13, 2022 at 12:58 pm
[url=http://prednisone.works/]buying prednisone mexico[/url]
TeoCounk · August 13, 2022 at 1:00 pm
[url=https://buycymbalta.digital/]cymbalta price[/url]
MaryCounk · August 13, 2022 at 1:02 pm
[url=https://glucophage.digital/]can you buy metformin over the counter[/url] [url=https://buyventolin.monster/]4mg albuterol[/url] [url=https://vermoxtab.online/]where can i buy vermox medication online[/url]
MichaelGuabe · August 13, 2022 at 1:09 pm
[url=https://drugstore.email/]thecanadianpharmacy[/url]
Estebanguall · August 13, 2022 at 1:10 pm
[url=http://viagraetabs.quest/]india viagra tablets[/url]
JaneCounk · August 13, 2022 at 1:17 pm
[url=https://cialisstab.monster/]generic tadalafil coupon[/url]
MaryCounk · August 13, 2022 at 1:23 pm
[url=https://buycialis.digital/]tadalafil over the counter canada[/url] [url=https://cialisstab.monster/]cialis pill price in india[/url] [url=https://valtrex.works/]how to get valtrex prescription[/url] [url=https://viagraatab.quest/]viagra order online usa[/url]
KiaCounk · August 13, 2022 at 1:26 pm
[url=https://cialisstab.monster/]cost of cialis in mexico[/url]
RicIsose · August 13, 2022 at 1:26 pm
[url=https://stromectol.digital/]ivermectin 3 mg tabs[/url] [url=https://cialisjtabs.monster/]cialis 2 mg[/url] [url=https://cialisvtab.quest/]cialis generic 10 mg[/url] [url=https://cialisytab.monster/]buy cialis online prescription[/url] [url=https://accutanetab.online/]accutane gel price[/url] [url=https://cialisqtabs.quest/]cialis 5mg price in australia[/url]
MiclTek · August 13, 2022 at 1:32 pm
[url=http://ventolin.guru/]where can i buy albuterol tablets[/url]
MiclTek · August 13, 2022 at 1:33 pm
[url=http://xenical.digital/]orlistat for sale[/url]
Michaeldrist · August 13, 2022 at 1:40 pm
[url=http://clopidogrel.works/]clopidogrel 150 mg[/url]
Michaelemult · August 13, 2022 at 1:43 pm
[url=http://albenza.shop/]buy albenza online uk[/url]
MiclTek · August 13, 2022 at 1:44 pm
[url=http://buyneurontin.boutique/]order gabapentin[/url]
Estebanguall · August 13, 2022 at 1:46 pm
[url=http://clopidogrel.works/]plavix 37.5 mg[/url]
JosephMaict · August 13, 2022 at 1:47 pm
[url=https://viagraktab.quest/]cheapest price for sildenafil 20 mg[/url] [url=https://neurontintab.online/]gabapentin 700 mg[/url] [url=https://stromectol.digital/]ivermectin 0.08%[/url] [url=https://levaquin.shop/]levaquin medication[/url] [url=https://plavix.works/]clopidogrel 70 mg[/url] [url=https://cialisxtab.monster/]cialis tablets generic[/url] [url=https://drugstore.email/]canadapharmacyonline legit[/url]
MiaCounk · August 13, 2022 at 2:00 pm
[url=https://buyprednisolone.boutique/]prednisolone buy uk[/url]
MichaelDwego · August 13, 2022 at 2:09 pm
[url=https://baclofen.digital/]baclofen cost uk[/url]
KiaCounk · August 13, 2022 at 2:25 pm
[url=https://buylisinopril.digital/]lisinopril tabs 88mg[/url]
MiaCounk · August 13, 2022 at 2:37 pm
[url=https://zofran.boutique/]zofran 8mg coupon[/url]
ZakCounk · August 13, 2022 at 2:44 pm
[url=https://viagrautabs.monster/]generic viagra online mexico[/url] [url=https://viagractab.monster/]female viagra 100mg[/url] [url=https://cialisytabs.monster/]once a day cialis[/url]
MarvinZem · August 13, 2022 at 2:48 pm
[url=https://cialisjtabs.monster/]tadalafil lowest prices canada[/url]
Estebanguall · August 13, 2022 at 2:48 pm
[url=http://neurontin.boutique/]can you buy gabapentin over the counter[/url]
PaulCounk · August 13, 2022 at 2:52 pm
[url=https://valtrex.works/]buy valtrex on line[/url]
EyeCounk · August 13, 2022 at 3:06 pm
[url=https://viagraatab.quest/]price of viagra per pill[/url] [url=https://silagra.guru/]silagra 100[/url] [url=https://cialisytabs.monster/]cialis canada online pharmacy[/url] [url=https://cialisbtab.monster/]prescription cost for cialis[/url] [url=https://promethazine.store/]phenergan cream south africa[/url] [url=https://buyivermectin.boutique/]cost of ivermectin lotion[/url] [url=https://buypropecia.works/]generic propecia usa[/url]
RodneyTab · August 13, 2022 at 3:32 pm
[url=http://cialisatab.quest/]price of generic cialis[/url]
RichardFaply · August 13, 2022 at 3:34 pm
[url=http://neurontin.boutique/]medication gabapentin 300 mg capsule[/url] [url=http://modafiniltab.online/]modafinil over the counter uk[/url] [url=http://pharmacy.golf/]online pharmacy com[/url] [url=http://nexium.works/]nexium singapore[/url] [url=http://buyprednisone.works/]prednisone 4 tablets daily[/url] [url=http://buybenicar.works/]buy benicar[/url]
Michaeldrist · August 13, 2022 at 3:35 pm
[url=http://anafranil.boutique/]anafranil 25g[/url]
IvyCounk · August 13, 2022 at 3:40 pm
[url=https://buyventolin.monster/]combivent medication[/url] [url=https://fluoxetine.digital/]20 mg prozac capsule[/url] [url=https://silagra.guru/]silagra pills in india[/url] [url=https://effexor.boutique/]effexor 37.5 price[/url] [url=https://buysynthroid.monster/]synthroid 0.075[/url] [url=https://benicar.guru/]benicar cost[/url] [url=https://viagraotab.monster/]female viagra uk[/url] [url=https://disulfiram.digital/]buy antabuse australia[/url]
RobertFoold · August 13, 2022 at 3:48 pm
[url=https://buyfinasteride.works/]buy finasteride tablet india[/url]
TommyHepsy · August 13, 2022 at 3:54 pm
[url=https://ventolin.guru/]ventolin inhaler[/url]
JackCounk · August 13, 2022 at 3:55 pm
[url=http://vermoxtab.online/]vermox in canada[/url]
DavisMug · August 13, 2022 at 4:05 pm
[url=http://cialisatab.quest/]cialis 200 mg price[/url]
JimCounk · August 13, 2022 at 4:18 pm
[url=http://buypropranolol.shop/]propranolol prices usa[/url]
RichardFaply · August 13, 2022 at 4:31 pm
[url=http://canadianpharmacy.boutique/]safe canadian pharmacy[/url] [url=http://pharmacy.golf/]sky pharmacy[/url] [url=http://anafranil.boutique/]anafranil usa[/url] [url=http://buyprednisone.works/]prednisone buy nz[/url] [url=http://levaquin.shop/]levaquin price[/url] [url=http://neurontintab.online/]can you order gabapentin online[/url]
Michaeldrist · August 13, 2022 at 4:33 pm
[url=http://pharmacy.golf/]good pharmacy[/url]
MiclTek · August 13, 2022 at 4:41 pm
[url=http://buymodafinil.guru/]provigil 400 mg[/url]
Curtisvibia · August 13, 2022 at 4:41 pm
[url=https://viagraetabs.quest/]sildenafil pharmacy[/url]
JudyCounk · August 13, 2022 at 4:57 pm
[url=http://buyseroquel.boutique/]800 mg seroquel[/url]
EyeCounk · August 13, 2022 at 5:02 pm
[url=https://buycialis.digital/]buy cialis on line without prescription[/url] [url=https://albendazole.digital/]albendazole tablet brand name[/url] [url=https://vermoxtab.online/]vermox mexico[/url] [url=https://buypropecia.works/]propecia 2017[/url] [url=https://buyventolin.monster/]albuterol in europe[/url] [url=https://fluoxetine.digital/]fluoxetine 40 mg price in india[/url] [url=https://viagraotab.monster/]viagra order from canada[/url]
CarlCounk · August 13, 2022 at 5:10 pm
[url=http://viagractab.monster/]viagra australia pharmacy[/url]
TedCounk · August 13, 2022 at 5:17 pm
[url=https://viagractab.monster/]buy viagra us pharmacy[/url]
MaryCounk · August 13, 2022 at 5:18 pm
[url=https://pharmacyonline.guru/]online pharmacy without scripts[/url] [url=https://celebrex.guru/]pfizer celebrex[/url] [url=https://valtrex.works/]valtrex 1000 mg daily[/url] [url=https://silagra.guru/]silagra without prescription[/url] [url=https://buyatarax.works/]atarax pill price[/url] [url=https://viagradtab.quest/]us over the counter viagra[/url] [url=https://buypropranolol.shop/]medicine propranolol[/url]
Michaelemult · August 13, 2022 at 5:42 pm
[url=http://albenza.golf/]albendazole usa[/url]
MichaelDwego · August 13, 2022 at 5:57 pm
[url=https://propranololtabs.online/]propranolol cost uk[/url]
Jameseloro · August 13, 2022 at 6:02 pm
[url=http://buyrobaxin.shop/]buy robaxin online uk[/url] [url=http://propranololtabs.online/]inderal generic[/url] [url=http://cialisptabs.monster/]prescription cialis from canada[/url] [url=http://canadianpharmacy.boutique/]online pharmacy delivery delhi[/url] [url=http://anafranil.boutique/]anafranil anxiety[/url] [url=http://viagrastab.quest/]buy sildenafil generic[/url]
JaneCounk · August 13, 2022 at 6:08 pm
[url=https://buycymbalta.digital/]where to buy generic cymbalta[/url]
AlanCounk · August 13, 2022 at 6:08 pm
[url=http://valtrex.works/]order valtrex canada[/url] [url=http://buyivermectin.boutique/]stromectol 12mg online[/url] [url=http://viagrabtabs.quest/]viagra otc uk[/url] [url=http://buyacyclovir.boutique/]buy zovirax online[/url]
Charlesaduse · August 13, 2022 at 6:15 pm
[url=https://gabapentintab.online/]neurontin for sale online[/url]
Estebanguall · August 13, 2022 at 6:22 pm
[url=http://propranolol.guru/]inderal 80 mg prices[/url]
Edgarlor · August 13, 2022 at 6:30 pm
[url=http://propranololtabs.online/]propranolol 10 mg buy online[/url]
MichaelGuabe · August 13, 2022 at 6:33 pm
[url=https://buylisinopril.guru/]lisinopril 20 mg uk[/url]
Michaeldrist · August 13, 2022 at 6:38 pm
[url=http://buyprednisone.digital/]prednisone for sale without a prescription[/url]
UgoCounk · August 13, 2022 at 6:53 pm
[url=http://diflucan247.com/]generic diflucan otc[/url]
ElwoodGon · August 13, 2022 at 7:06 pm
[url=http://clopidogrel.works/]plavix medicine[/url]
IvyCounk · August 13, 2022 at 7:07 pm
[url=https://prednisone.works/]prednisone 2 mg[/url] [url=https://disulfiram.digital/]antabuse otc[/url] [url=https://cialisitab.quest/]can you buy real cialis online[/url] [url=https://viagraatab.quest/]sildenafil pills in india[/url] [url=https://lexapro.works/]can i buy lexapro online without prescription[/url]
EvaCounk · August 13, 2022 at 7:11 pm
[url=http://cialisytabs.monster/]cialis without a prescription[/url]
MaryCounk · August 13, 2022 at 7:24 pm
[url=https://effexor.boutique/]effexor xr 75 mg[/url] [url=https://cialisstab.monster/]where can i get cialis in singapore[/url] [url=https://buyacyclovir.boutique/]can you buy acyclovir pills over the counter[/url]
Samuelraisk · August 13, 2022 at 7:27 pm
[url=http://levaquin.shop/]levaquin buy online[/url]
RichardFaply · August 13, 2022 at 7:45 pm
[url=http://cialisptabs.monster/]canadian cialis 5mg[/url] [url=http://buyprednisone.digital/]buy prednisone online no prescription[/url] [url=http://buyclomid.works/]buying clomid[/url] [url=http://paroxetine.boutique/]buy paxil online usa[/url]
ElwoodGon · August 13, 2022 at 7:48 pm
[url=http://buycelebrex.boutique/]can you buy celebrex in mexico[/url]
SamCounk · August 13, 2022 at 8:03 pm
[url=http://celebrex.guru/]can you buy celebrex over the counter[/url] [url=http://glucophage.digital/]metformin for sale canada[/url] [url=http://viagraatab.quest/]order generic viagra uk[/url] [url=http://fluoxetine.boutique/]buy prozac online without prescription[/url] [url=http://viagradtab.quest/]sildenafil 50 coupon[/url]
RicIsose · August 13, 2022 at 8:03 pm
[url=https://cialisptabs.monster/]cialis viagra[/url] [url=https://cymbalta.sale/]cymbalta without prescription[/url] [url=https://cialisxtab.monster/]cheap generic cialis 5mg[/url] [url=https://buybenicar.works/]benicar 40 mg tablet[/url]
Edgarlor · August 13, 2022 at 8:06 pm
[url=http://albenza.golf/]albendazole buy uk[/url]
CarlCounk · August 13, 2022 at 8:08 pm
[url=http://buylisinopril.digital/]zestoretic[/url]
RobertFoold · August 13, 2022 at 8:09 pm
[url=https://buybenicar.works/]benicar 20 mg best price[/url]
TommyHepsy · August 13, 2022 at 8:15 pm
[url=https://levaquin.shop/]levaquin levofloxacin[/url]
AlanCounk · August 13, 2022 at 8:42 pm
[url=http://cialisytabs.monster/]cheap generic cialis canadian pharmacy[/url] [url=http://buysuhagra.store/]suhagra price[/url] [url=http://viagractab.monster/]buy generic viagra from canada online[/url] [url=http://silagra.guru/]silagra[/url] [url=http://buyacyclovir.boutique/]zovirax 5 cream generic[/url]
ElwoodGon · August 13, 2022 at 9:05 pm
[url=http://cialisjtabs.monster/]tadalafil drug[/url]
RicIsose · August 13, 2022 at 9:22 pm
[url=https://neurontintab.online/]gabapentin in mexico[/url] [url=https://plavix.works/]buy plavix online[/url] [url=https://paroxetine.boutique/]paroxetine 40 mg prices[/url] [url=https://buymodafinil.guru/]modafinil online[/url] [url=https://buystrattera.works/]strattera cost canada[/url]
Charlesaduse · August 13, 2022 at 9:24 pm
[url=https://levaquin.shop/]levaquin pill[/url]
DavisMug · August 13, 2022 at 9:31 pm
[url=http://propranololtabs.online/]propranolol how to get[/url]
WilliamWem · August 13, 2022 at 9:35 pm
[url=https://kamagra.guru/]buy kamagra online uk[/url] [url=https://buygabapentin.store/]best price for gabapentin 300 mg[/url] [url=https://neurontintab.online/]gabapentin 3600 mg[/url]
MichaelDwego · August 13, 2022 at 9:46 pm
[url=https://canadianpharmacy.boutique/]safe online pharmacies[/url]
AlanCounk · August 13, 2022 at 10:12 pm
[url=http://buyatarax.works/]can you buy atarax over the counter[/url] [url=http://glucophage.digital/]metformin 500 mg tablet online[/url] [url=http://vpxl.digital/]vpxl[/url] [url=http://cialisytabs.monster/]chewing viagra tablets[/url] [url=http://prednisolone.guru/]prednisolone cost australia[/url] [url=http://citalopram.boutique/]citalopram for ibs[/url] [url=http://cialisbtab.monster/]buy cialis 20mg[/url]
RobertFoold · August 13, 2022 at 10:17 pm
[url=https://viagrastab.quest/]where to buy viagra in canada safely[/url]
IvyCounk · August 13, 2022 at 10:21 pm
[url=https://buylisinopril.digital/]lisinopril tablets for sale[/url] [url=https://prednisone.works/]prednisone 20mg buy online[/url] [url=https://fluoxetine.digital/]prozac 90 mg daily[/url] [url=https://buystromectol.works/]ivermectin cream cost[/url] [url=https://citalopram.boutique/]citalopram para que sirve[/url]
Estebanguall · August 13, 2022 at 10:27 pm
[url=http://gabapentintab.online/]600 mg gabapentin tablet[/url]
AlanCounk · August 13, 2022 at 10:28 pm
[url=http://buyseroquel.boutique/]seroquel 2.5 mg[/url] [url=http://acyclovir.directory/]zovirax 200 mg capsule[/url] [url=http://buycialis.digital/]generic cialis uk[/url]
MiclTek · August 13, 2022 at 10:37 pm
[url=http://paroxetine.boutique/]paxil for menopause[/url]
Michaelemult · August 13, 2022 at 10:47 pm
[url=http://buyclomid.works/]clomid india pharmacy[/url]
LisaCounk · August 13, 2022 at 10:53 pm
[url=https://viagraatab.quest/]viagra 20mg generic[/url]
KiaCounk · August 13, 2022 at 11:01 pm
[url=https://buyseroquel.boutique/]seroquel for adhd[/url]
Estebanguall · August 13, 2022 at 11:10 pm
[url=http://viagrastab.quest/]viagra super force[/url]
IvyCounk · August 13, 2022 at 11:19 pm
[url=https://hydrochlorothiazide.boutique/]generic zestoretic[/url] [url=https://viagractab.monster/]sildenafil nz price[/url] [url=https://suhagra.store/]suhagra 50 tablet price[/url] [url=https://viagraotab.monster/]150 mg generic viagra[/url] [url=https://viagraatab.quest/]us over the counter viagra[/url] [url=https://neurontina.online/]medicine gabapentin 600 mg[/url] [url=https://buyivermectin.boutique/]where to buy ivermectin pills[/url] [url=https://prednisolone.guru/]buy prednisolone 40 mg[/url]
DenCounk · August 13, 2022 at 11:23 pm
[url=https://citalopram.boutique/]citalopram 20 mg pill[/url]
Davidhup · August 13, 2022 at 11:36 pm
[url=https://buyneurontin.boutique/]can you buy gabapentin online[/url]
DenCounk · August 13, 2022 at 11:37 pm
[url=https://hydrochlorothiazide.boutique/]how much is hydrochlorothiazide 25 mg[/url]
Samuelraisk · August 13, 2022 at 11:46 pm
[url=http://buystrattera.works/]strattera uk prescription[/url]
TimothyThive · August 13, 2022 at 11:53 pm
[url=https://levaquin.shop/]buy levaquin[/url]
YonCounk · August 13, 2022 at 11:59 pm
[url=https://promethazine.store/]phenergan 25mg[/url]
KiaCounk · August 14, 2022 at 12:05 am
[url=https://viagraktabs.monster/]can you buy viagra online without a prescription[/url]
KimCounk · August 14, 2022 at 12:22 am
[url=http://buyprednisolone.boutique/]prednisolone uk buy[/url]
DenCounk · August 14, 2022 at 12:22 am
[url=https://prednisolone.guru/]prednisolone 25[/url]
Estebanguall · August 14, 2022 at 12:25 am
[url=http://plavix.works/]how much is plavix medication[/url]
EyeCounk · August 14, 2022 at 12:26 am
[url=https://albendazole.digital/]albenza 200 mg tablet[/url] [url=https://vermoxtab.online/]buy vermox uk[/url] [url=https://prednisone.works/]how much is prednisone cost[/url] [url=https://viagrautabs.monster/]viagra buying canada[/url] [url=https://buysynthroid.monster/]synthroid tablets 25 mcg[/url] [url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide 50[/url] [url=https://zofran.boutique/]buy zofran canada[/url]
PaulCounk · August 14, 2022 at 12:38 am
[url=https://viagrabtabs.quest/]retail price of viagra[/url]
Samuelraisk · August 14, 2022 at 12:39 am
[url=http://buyclomid.works/]where can i buy clomid pills online[/url]
MarkCounk · August 14, 2022 at 12:54 am
[url=https://vpxl.digital/]vpxl[/url]
IvyCounk · August 14, 2022 at 12:55 am
[url=https://buyseroquel.boutique/]order seroquel[/url] [url=https://buysuhagra.store/]buy suhagra india[/url] [url=https://disulfiram.digital/]buy disulfiram without prescription[/url] [url=https://viagraatab.quest/]purchasing viagra in usa[/url] [url=https://buycymbalta.digital/]cymbalta lexapro[/url] [url=https://fluoxetine.digital/]prozac online without prescription[/url] [url=https://lexapro.works/]lexapro online usa[/url] [url=https://buysynthroid.monster/]synthroid buy[/url]
DavisMug · August 14, 2022 at 1:04 am
[url=http://drugstore.email/]canadian neighbor pharmacy[/url]
MichaelGuabe · August 14, 2022 at 1:07 am
[url=https://cialisvtab.quest/]buy tadalafil online paypal[/url]
ElwoodGon · August 14, 2022 at 1:08 am
[url=http://neurontin.boutique/]neurontin prescription cost[/url]
EyeCounk · August 14, 2022 at 1:11 am
[url=https://viagraatab.quest/]sildenafil online buy india[/url] [url=https://albendazole.digital/]albenza over the counter[/url]
JosephMaict · August 14, 2022 at 1:12 am
[url=https://canadianpharmacy.boutique/]express pharmacy[/url] [url=https://buyclomid.works/]how to order clomid[/url] [url=https://buyneurontin.boutique/]cheap neurontin online[/url] [url=https://albenza.golf/]albendazole uk pharmacy[/url] [url=https://drugstore.email/]prescription free canadian pharmacy[/url] [url=https://viagragtabs.quest/]sildenafil generic us[/url]
JosephMaict · August 14, 2022 at 1:21 am
[url=https://cialisxtab.monster/]buy cialis online cheap[/url] [url=https://accutanetab.online/]buy accutane online from europe[/url] [url=https://cialisytab.monster/]cialis 100mg price[/url] [url=https://canadianpharmacy.boutique/]reputable canadian pharmacy[/url] [url=https://viagraktab.quest/]viagra tabs[/url] [url=https://buygabapentin.store/]gabapentin brand name in india[/url] [url=https://cialisqtabs.quest/]tadalafil canada price[/url]
MarvinZem · August 14, 2022 at 1:28 am
[url=https://neurontin.boutique/]gabapentin online buy[/url]
MiaCounk · August 14, 2022 at 1:39 am
[url=https://viagraktabs.monster/]buy viagra online[/url]
ElwoodGon · August 14, 2022 at 1:39 am
[url=http://albenza.shop/]albendazole 2 tabs[/url]
MaryCounk · August 14, 2022 at 1:50 am
[url=https://promethazine.store/]buy phenergan 10mg online[/url] [url=https://buylisinopril.digital/]zestril coupon[/url] [url=https://fluoxetine.boutique/]prozac 80 mg[/url]
Samuelraisk · August 14, 2022 at 1:51 am
[url=http://propranolol.guru/]propranolol order online[/url]
Michaelemult · August 14, 2022 at 1:52 am
[url=http://baclofen.digital/]baclofen cream[/url]
Estebanguall · August 14, 2022 at 1:52 am
[url=http://viagrattabs.monster/]buy viagra in canada[/url]
SueCounk · August 14, 2022 at 2:08 am
[url=https://neurontina.online/]neurontin 10 mg[/url]
Jameseloro · August 14, 2022 at 2:17 am
[url=http://plavix.works/]plavix 196[/url] [url=http://cymbalta.sale/]cymbalta rx[/url] [url=http://viagrattabs.monster/]cheap viagra from india[/url] [url=http://buyprednisone.works/]generic prednisone otc[/url] [url=http://anafranil.boutique/]anafranil 25g[/url] [url=http://buymodafinil.guru/]buy modafinil online canada[/url] [url=http://baclofen.digital/]lioresal 5mg[/url]
Jameseloro · August 14, 2022 at 2:22 am
[url=http://cialisptabs.monster/]cialis 25 mg tablet[/url] [url=http://buyprednisone.digital/]5094 prednisone[/url] [url=http://cymbalta.sale/]cymbalta 60 mg cost[/url] [url=http://stromectol.digital/]ivermectin 3 mg tabs[/url] [url=http://viagragtabs.quest/]how much is viagra online[/url] [url=http://nexium.works/]nexium 6.00 coupon[/url] [url=http://buyrobaxin.shop/]robaxin 8 mg daily[/url] [url=http://buystrattera.works/]strattera prescription cost[/url]
AmyCounk · August 14, 2022 at 2:28 am
[url=http://viagrabtabs.quest/]where can i buy viagra cheap[/url]
LisaCounk · August 14, 2022 at 2:30 am
[url=https://cialisbtab.monster/]cialis 10mg[/url]
Michaelemult · August 14, 2022 at 2:33 am
[url=http://albuterol.directory/]cost of albuterol tablets[/url]
SueCounk · August 14, 2022 at 2:34 am
[url=https://viagraftabs.monster/]viagra mexico cost[/url]
ElwoodGon · August 14, 2022 at 2:43 am
[url=http://albuterol.directory/]albuterol online canada[/url]
LisaCounk · August 14, 2022 at 2:48 am
[url=https://buyacyclovir.boutique/]acyclovir pills cost[/url]
AnnaCounk · August 14, 2022 at 2:56 am
[url=http://buyseroquel.boutique/]seroquel buy online[/url]
WilliamWem · August 14, 2022 at 3:04 am
[url=https://nexium.works/]10mg nexium[/url] [url=https://buyneurontin.boutique/]neurontin 200 mg tablets[/url] [url=https://neurontin.boutique/]neurontin 300 mg cap[/url]
Charlesaduse · August 14, 2022 at 3:08 am
[url=https://viagrastab.quest/]viagra 100mg cheap price[/url]
IvyCounk · August 14, 2022 at 3:08 am
[url=https://viagraftabs.monster/]viagra tablets in india online purchase[/url] [url=https://effexor.boutique/]effexor for sale[/url]
CarlCounk · August 14, 2022 at 3:16 am
[url=http://buyivermectin.boutique/]ivermectin 4[/url]
WimCounk · August 14, 2022 at 3:16 am
[url=http://cipro.email/]cipro 250 mg price[/url]
JoeCounk · August 14, 2022 at 3:25 am
[url=http://buyacyclovir.boutique/]zovirax tablets online uk[/url] [url=http://buyprednisolone.boutique/]prednisolone cost uk[/url] [url=http://buypropecia.works/]finasteride 5mg price[/url] [url=http://albendazole.digital/]albendazole online pharmacy[/url] [url=http://lexapro.works/]drug lexapro[/url]
IvyCounk · August 14, 2022 at 3:33 am
[url=https://buystromectol.works/]stromectol 0.5 mg[/url] [url=https://buypropecia.works/]buy propecia tablets[/url] [url=https://glucophage.digital/]glucophage price in australia[/url] [url=https://viagraktabs.monster/]order sildenafil canada[/url] [url=https://suhagra.store/]buy suhagra 100mg online[/url] [url=https://celebrex.guru/]celebrex prices[/url] [url=https://buyprednisolone.boutique/]25mg prednisolone[/url] [url=https://effexor.boutique/]effexor 37.5 mg capsule[/url]
BooCounk · August 14, 2022 at 3:34 am
[url=https://onlinepharmacy.agency/]canadian mail order pharmacy[/url]
Jameseloro · August 14, 2022 at 3:47 am
[url=http://xenical.digital/]orlistat 60 mg price[/url] [url=http://anafranil.boutique/]anafranil usa[/url] [url=http://buyprednisone.works/]prednisone deltasone[/url]
ElwoodGon · August 14, 2022 at 3:53 am
[url=http://buyrobaxin.shop/]robaxin 750 mg[/url]
SueCounk · August 14, 2022 at 3:55 am
[url=https://buypropecia.works/]finasteride tablet price[/url]
Curtisvibia · August 14, 2022 at 3:58 am
[url=https://clopidogrel.works/]clopidogrel gel[/url]
MichaelDwego · August 14, 2022 at 4:06 am
[url=https://anafranil.boutique/]anafranil canada[/url]
ZakCounk · August 14, 2022 at 4:17 am
[url=https://hydrochlorothiazide.boutique/]hydrochlorothiazide triamterene[/url] [url=https://viagrautabs.monster/]viagra otc united states[/url] [url=https://promethazine.store/]phenergan gel[/url] [url=https://suhagra.store/]suhagra online order[/url] [url=https://vermoxtab.online/]mebendazole tablets[/url] [url=https://viagraftabs.monster/]20 mg generic sildenafil[/url] [url=https://glucophage.digital/]order metformin online without prescription[/url] [url=https://zofran.boutique/]buy zofran uk[/url]
EyeCounk · August 14, 2022 at 4:17 am
[url=https://neurontina.online/]gabapentin 200[/url] [url=https://cialisitab.quest/]cialis for daily use for sale[/url] [url=https://glucophage.digital/]metformin for sale[/url] [url=https://citalopram.boutique/]buy celexa online uk[/url]
ElwoodGon · August 14, 2022 at 4:26 am
[url=http://buystrattera.works/]strattera 40 mg pills[/url]
Edgarlor · August 14, 2022 at 4:29 am
[url=http://cialisvtab.quest/]cialis 20mg price in south africa[/url]
PaulCounk · August 14, 2022 at 4:46 am
[url=https://acyclovir.directory/]can you buy zovirax over the counter[/url]
WilliamWem · August 14, 2022 at 4:49 am
[url=https://stromectol.digital/]stromectol uk[/url] [url=https://cialisptabs.monster/]cialis low cost[/url] [url=https://cialisxtab.monster/]buy daily cialis[/url] [url=https://neurontin.boutique/]buy gabapentin india[/url] [url=https://albenza.shop/]albendazole tablets australia[/url] [url=https://drugstore.email/]cyprus online pharmacy[/url] [url=https://cialisqtabs.quest/]cialis online price[/url] [url=https://propranololtabs.online/]inderal 60 mg[/url]
AlanCounk · August 14, 2022 at 5:02 am
[url=http://prednisone.works/]prednisone 20mg by mail order[/url] [url=http://effexor.boutique/]effexor 37 5mg[/url] [url=http://prednisolone.guru/]prednisolone to buy[/url] [url=http://fluoxetine.digital/]where to order prozac[/url]
Michaelemult · August 14, 2022 at 5:18 am
[url=http://plavix.works/]plavix 70 mg[/url]
RobertFoold · August 14, 2022 at 5:20 am
[url=https://albenza.shop/]buy albenza online uk[/url]
NickCounk · August 14, 2022 at 5:21 am
[url=http://cialisstab.monster/]cialis cost canada[/url]
KimCounk · August 14, 2022 at 5:39 am
[url=http://buyatarax.works/]where can i buy atarax in uk[/url]
KimCounk · August 14, 2022 at 5:57 am
[url=http://buycymbalta.digital/]cymbalta 80 mg[/url]
MiclTek · August 14, 2022 at 6:07 am
[url=http://xenical.digital/]orlistat 60mg uk[/url]
RodneyTab · August 14, 2022 at 6:29 am
[url=http://plavix.works/]where to buy clopidogrel[/url]
JackCounk · August 14, 2022 at 6:31 am
[url=http://buystromectol.works/]purchase oral ivermectin[/url]
Michaelemult · August 14, 2022 at 6:35 am
[url=http://cialisqtabs.quest/]viagra cialis online[/url]
SamCounk · August 14, 2022 at 6:46 am
[url=http://viagraktabs.monster/]viagra purchase in canada[/url] [url=http://zofran.boutique/]zofran for sale[/url] [url=http://viagraatab.quest/]sildenafil 100mg usa[/url] [url=http://hydrochlorothiazide.boutique/]hydrochlorothiazide 25 mg tab[/url] [url=http://buysynthroid.monster/]best prices for synthroid[/url] [url=http://buysuhagra.store/]suhagra 50 price in india[/url]
MarvinZem · August 14, 2022 at 6:50 am
[url=https://clopidogrel.works/]plavix 75 mg cost[/url]
DavisMug · August 14, 2022 at 6:53 am
[url=http://propranololtabs.online/]propranolol 10mg cheap[/url]
JaneCounk · August 14, 2022 at 6:57 am
[url=https://buyseroquel.boutique/]seroquel 100 mg coupon[/url]
RichardFaply · August 14, 2022 at 7:12 am
[url=http://cialisqtabs.quest/]cialis buy online india[/url] [url=http://cialisxtab.monster/]buy 5mg tadalafil[/url] [url=http://buystrattera.works/]strattera cost generic[/url] [url=http://propranololtabs.online/]propranolol 160 mg[/url] [url=http://accutanetab.online/]accutane 40[/url] [url=http://plavix.works/]clopidogrel pill[/url] [url=http://buyneurontin.boutique/]gabapentin cost of[/url] [url=http://neurontintab.online/]2 gabapentin[/url]
Edgarlor · August 14, 2022 at 7:14 am
[url=http://xenical.digital/]cheap xenical[/url]
MichaelGuabe · August 14, 2022 at 7:26 am
[url=https://buyneurontin.boutique/]600 mg gabapentin capsule[/url]
RodneyTab · August 14, 2022 at 7:40 am
[url=http://propranolol.guru/]propranolol 80 mg tablet[/url]
WilliamWem · August 14, 2022 at 7:49 am
[url=https://synthroid.best/]2 synthroid[/url] [url=https://propranolol.guru/]propranolol 200 mg[/url] [url=https://nexium.works/]nexium purchase online[/url] [url=https://baclofen.digital/]baclofen without prescription[/url] [url=https://buycelebrex.boutique/]celebrex 400 mg prices[/url] [url=https://buyrobaxin.shop/]robaxin south africa[/url]
AnnaCounk · August 14, 2022 at 7:49 am
[url=http://buycialis.digital/]online tadalafil us[/url]
NickCounk · August 14, 2022 at 7:52 am
[url=http://viagraftabs.monster/]viagra online purchase singapore[/url]
Samuelraisk · August 14, 2022 at 8:02 am
[url=http://nexium.works/]nexium otc costs[/url]
RicIsose · August 14, 2022 at 8:07 am
[url=https://ventolin.guru/]combivent discount[/url] [url=https://plavix.works/]clopidogrel medicine[/url] [url=https://albenza.shop/]albenza pinworms[/url] [url=https://drugstore.email/]online pharmacy no prescription needed[/url] [url=https://stromectol.digital/]stromectol 3mg cost[/url] [url=https://buyclomid.works/]clomid buy india[/url]
RodneyTab · August 14, 2022 at 8:11 am
[url=http://paroxetine.boutique/]paxil for anxiety disorder[/url]
CarlCounk · August 14, 2022 at 8:24 am
[url=http://neurontina.online/]neurontin tablets uk[/url]
JasonCounk · August 14, 2022 at 8:42 am
[url=https://pharmacyonline.guru/]online pharmacy 365[/url]
UgoCounk · August 14, 2022 at 8:59 am
[url=http://clopidogrelplavix.quest/]clopidogrel plavix[/url]
Jameseloro · August 14, 2022 at 9:01 am
[url=http://buygabapentin.store/]gabapentin drug[/url] [url=http://buylisinopril.guru/]lisinopril 7.5 mg[/url] [url=http://cymbalta.sale/]cymbalta tablets cost[/url] [url=http://cialisqtabs.quest/]cialis buy europe[/url] [url=http://viagraktab.quest/]order viagra online paypal[/url] [url=http://neurontin.boutique/]gabapentin 40 mg[/url] [url=http://albuterol.directory/]ventolin nebulizer[/url]
JasonCounk · August 14, 2022 at 9:07 am
[url=https://viagractab.monster/]generic viagra online free shipping[/url]
JimCounk · August 14, 2022 at 9:14 am
[url=http://silagra.guru/]silagra online india[/url]
Michaeldrist · August 14, 2022 at 9:19 am
[url=http://viagragtabs.quest/]how much is the cost of viagra[/url]
MaryCounk · August 14, 2022 at 9:21 am
[url=https://acyclovir.directory/]buy zovirax[/url] [url=https://cialisytabs.monster/]where to buy generic cialis online[/url] [url=https://buycymbalta.digital/]cheap cymbalta online[/url] [url=https://buystromectol.works/]ivermectin 6 mg tablets[/url] [url=https://silagra.guru/]buy cheap silagra[/url] [url=https://viagraotab.monster/]how to buy generic viagra online[/url] [url=https://fluoxetine.digital/]fluoxetine 10mg tablets australia[/url] [url=https://viagractab.monster/]sildenafil tablets[/url]
Michaeldrist · August 14, 2022 at 9:23 am
[url=http://cialisjtabs.monster/]tadalafil 5mg online canada[/url]
LisaCounk · August 14, 2022 at 9:49 am
[url=https://chloroquine.boutique/]nivaquine[/url]
EvaCounk · August 14, 2022 at 9:59 am
[url=http://advair.site/]average price for advair[/url]
AshCounk · August 14, 2022 at 10:06 am
[url=https://vardenafil.solutions/]generic levitra[/url] [url=https://buyalbenza.store/]albendazole with no rx[/url] [url=https://sildallis.com/]sildalis india[/url] [url=https://tadalafillily.com/]generic tadalafil usa pharmacy[/url] [url=https://zestoretic.shop/]buy zestoretic online[/url]
MiclTek · August 14, 2022 at 10:12 am
[url=https://citalopram.fun/]cheap celexa[/url]
DavisMug · August 14, 2022 at 10:17 am
[url=http://antabuse.fun/]antabuse generic[/url]
MiclTek · August 14, 2022 at 10:51 am
[url=https://sumycin.site/]tetracycline without prescription[/url]
JackCounk · August 14, 2022 at 11:07 am
[url=https://azithromycin.sbs/]azithromycin 500 mg cost in australia[/url]
Michaelemult · August 14, 2022 at 11:18 am
[url=http://prednisolone.run/]prednisolone to buy[/url]
MaryCounk · August 14, 2022 at 11:26 am
[url=https://hydroxychloroquine.sbs/]quineprox 750[/url] [url=https://drugstore.fun/]online pharmacy group[/url] [url=https://fildena.xyz/]fildena 100 mg price[/url] [url=https://albendazole.run/]where to buy albendazole[/url]
MiaCounk · August 14, 2022 at 11:35 am
[url=http://toradol.xyz/]toradol brand[/url]
BooCounk · August 14, 2022 at 11:45 am
[url=https://vermox.digital/]buy vermox 100mg[/url]
IvyCounk · August 14, 2022 at 11:57 am
[url=http://toradol.xyz/]toradol for kidney stones[/url] [url=http://prazosin.xyz/]prazosin brand[/url]
AmyCounk · August 14, 2022 at 12:04 pm
[url=https://chloroquine.boutique/]chloroquine cancer[/url]
EyeCounk · August 14, 2022 at 12:08 pm
[url=http://wellbutrin.life/]wellbutrin without a prescription[/url] [url=http://fluconazole.xyz/]can you purchase diflucan[/url] [url=http://levofloxacin.fun/]generic levaquin[/url] [url=http://bactrim.sbs/]where to get bactrim[/url] [url=http://estrace.xyz/]buy estrace cream online no prescription[/url] [url=http://hydroxychloroquine.sbs/]buy plaquenil from canada[/url]
DenCounk · August 14, 2022 at 12:17 pm
[url=http://tadalafil.moscow/]best buy cialis online[/url]
AmyCounk · August 14, 2022 at 12:23 pm
[url=https://prazosin.xyz/]prazosin 5[/url]
JaneCounk · August 14, 2022 at 12:39 pm
[url=http://fluconazole.xyz/]diflucan online canada[/url]
LisaCounk · August 14, 2022 at 12:41 pm
[url=https://tretinoin.fun/]cheap generic retin a[/url]
YonCounk · August 14, 2022 at 12:54 pm
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide 50[/url]
JimCounk · August 14, 2022 at 12:54 pm
[url=https://levofloxacin.fun/]levaquin tablets[/url]
DavisMug · August 14, 2022 at 12:55 pm
[url=http://cialisptabs.quest/]generic cialis over the counter[/url]
IvyCounk · August 14, 2022 at 12:55 pm
[url=http://duloxetine.fun/]prescription drug cymbalta[/url] [url=http://wellbutrin.life/]bupropion hydrochloride sr[/url] [url=http://trimox.fun/]amoxicillin 3000 mg[/url] [url=http://hydrochlorothiazide.fun/]zestoretic 10 mg[/url] [url=http://azithromycin.sbs/]zithromax buy online no prescription[/url] [url=http://tadalafil.team/]tadalafil cheap[/url]
AnnaCounk · August 14, 2022 at 1:08 pm
[url=http://levofloxacin.fun/]levaquin generic[/url]
TommyHepsy · August 14, 2022 at 1:36 pm
[url=https://prednisone.date/]order prednisone online no prescription[/url]
KimCounk · August 14, 2022 at 1:45 pm
[url=https://albendazole.run/]albendazole 400 mg price[/url]
PaulCounk · August 14, 2022 at 1:52 pm
[url=https://trazodone.loan/]trazodone 25[/url]
MichaelGuabe · August 14, 2022 at 1:59 pm
[url=http://hydroxychloroquine.stream/]hydroxychloroquine 200 mg price[/url]
KiaCounk · August 14, 2022 at 2:10 pm
[url=http://tizanidine.fun/]zanaflex over the counter[/url]
SueCounk · August 14, 2022 at 2:16 pm
[url=http://retina.run/]retin a 025 cream[/url]
JoeCounk · August 14, 2022 at 2:16 pm
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide 100 mg[/url] [url=https://hydroxychloroquine.media/]hydroxychloroquine 200 mg cost[/url] [url=https://flagyl.fun/]flagyl 500 mg tablet[/url] [url=https://levofloxacin.fun/]levaquin drug[/url]
MaryCounk · August 14, 2022 at 2:18 pm
[url=https://trental.cfd/]trental tablets order online[/url] [url=https://amoxil.site/]amoxicillin medicine over the counter[/url] [url=https://augmentin.xyz/]trimox 500[/url] [url=https://wellbutrin.life/]bupropion buy online[/url]
JasonCounk · August 14, 2022 at 2:19 pm
[url=http://zoloft.fun/]zoloft generic cost 25mg[/url]
Samuelraisk · August 14, 2022 at 2:22 pm
[url=http://clopidogrel.xyz/]plavix price[/url]
SueCounk · August 14, 2022 at 2:25 pm
[url=http://trimox.fun/]amoxicillin 375 mg[/url]
MiaCounk · August 14, 2022 at 2:31 pm
[url=http://glucophage.fun/]metformin with no prescription[/url]
JosephMaict · August 14, 2022 at 2:32 pm
[url=http://vermox.site/]vermox online uk[/url] [url=http://zestoretic.site/]zestoretic 20 25[/url] [url=http://zoloft.click/]how much is a zoloft prescription[/url]
KimCounk · August 14, 2022 at 2:46 pm
[url=https://tadalafil.moscow/]cost of cialis 5 mg[/url]
UgoCounk · August 14, 2022 at 2:50 pm
[url=http://cephalexin.boutique/]where to get cephalexin prescription[/url]
BooCounk · August 14, 2022 at 2:51 pm
[url=https://vermox.agency/]vermox otc canada[/url]
TedCounk · August 14, 2022 at 2:55 pm
[url=https://kamagra.live/]buy kamagra online usa[/url]
RichardFaply · August 14, 2022 at 2:57 pm
[url=http://amoxicillin.business/]price of amoxicillin in india[/url] [url=http://baclofen.fun/]baclofen cost 20mg[/url] [url=http://metformin.bid/]where to buy metformin[/url] [url=http://valtrex.click/]order valtrex online canada[/url] [url=http://prednisolone.run/]prednisolone sodium phosphate[/url] [url=http://prednisone.date/]prednisone 14 mg[/url] [url=http://baclofen.business/]order baclofen online[/url]
TommyHepsy · August 14, 2022 at 2:58 pm
[url=https://metformin.bid/]glucophage coupon[/url]
SueCounk · August 14, 2022 at 3:03 pm
[url=http://duloxetine.fun/]cymbalta online canada[/url]
IvyCounk · August 14, 2022 at 3:05 pm
[url=http://viagradtabs.quest/]how much is sildenafil in canada[/url] [url=http://toradol.xyz/]toradol brand name[/url] [url=http://effexor.fun/]effexor 100mg tablet[/url] [url=http://advair.site/]advair price comparison[/url] [url=http://tizanidine.fun/]tizanidine cost uk[/url] [url=http://chloroquine.boutique/]chloroquine cost australia[/url] [url=http://strattera.life/]strattera drug[/url]
MaryCounk · August 14, 2022 at 3:21 pm
[url=https://viagradtabs.quest/]buy viagra online in south africa[/url] [url=https://cytotec.cfd/]where can you buy cytotec over the counter[/url] [url=https://trimox.fun/]buy augmentin 875 mg online[/url]
NickCounk · August 14, 2022 at 3:22 pm
[url=http://albendazole.run/]albendazole generic price[/url]
JasonCounk · August 14, 2022 at 3:31 pm
[url=http://estrace.xyz/]estrace 01 cream[/url]
ZakCounk · August 14, 2022 at 3:34 pm
[url=https://advair.site/]advair medication[/url] [url=https://tadalafil.moscow/]tadalafil best price 5mg[/url] [url=https://retina.run/]retin a australia[/url] [url=https://hydroxychloroquine.media/]hydroxychloroquine sulfate oral[/url] [url=https://viagradtabs.quest/]where can i buy sildenafil online safely[/url] [url=https://trental.cfd/]buy trental 400 mg[/url] [url=https://prazosin.xyz/]prazosin cost australia[/url]
UgoCounk · August 14, 2022 at 3:44 pm
[url=http://domperidone.shop/]generic motilium[/url]
JimCounk · August 14, 2022 at 3:55 pm
[url=https://albendazole.run/]albendazole 400 mg buy online[/url]
AshCounk · August 14, 2022 at 4:00 pm
[url=https://cephalexinkeflex.quest/]cephalexin 250 mg capsules[/url] [url=https://tadacip.cfd/]canadian pharmacy tadacip[/url] [url=https://ddrpill.com/]trazodone 200 mg tablet[/url] [url=https://fildenatabs.online/]fildena usa[/url] [url=https://allopurinolrem.com/]allopurinol 400mg[/url] [url=https://kamagrasilcit.com/]kamagra jelly sachets[/url] [url=https://indocin.cyou/]indocin 25[/url] [url=https://antabuse.digital/]disulfiram 200 mg[/url]
ElwoodGon · August 14, 2022 at 4:00 pm
[url=https://buspar.site/]buspar medicine[/url]
MiaCounk · August 14, 2022 at 4:09 pm
[url=http://glucophage.fun/]purchase glucophage[/url]
TommyHepsy · August 14, 2022 at 4:16 pm
[url=https://baclofen.fun/]baclofen 7.5 mg[/url]
ElwoodGon · August 14, 2022 at 4:21 pm
[url=https://baclofen.fun/]baclofen 15 mg[/url]
TommyHepsy · August 14, 2022 at 4:30 pm
[url=https://atarax.fun/]atarax generic[/url]
AnnaCounk · August 14, 2022 at 4:36 pm
[url=http://hydroxychloroquine.media/]plaquenil for osteoarthritis[/url]
CarlCounk · August 14, 2022 at 4:39 pm
[url=https://strattera.life/]canadian pharmacy generic strattera[/url]
ZakCounk · August 14, 2022 at 4:44 pm
[url=https://zoloft.fun/]best price zoloft 100mg[/url] [url=https://metformin.fun/]glucophage 500 online[/url] [url=https://tadacip.site/]tadacip 20 tablet[/url] [url=https://femaleviagra.cfd/]canadian pharmacy generic sildenafil[/url] [url=https://fildena.xyz/]fildena 100[/url] [url=https://aurogra.xyz/]aurogra 100mg tablets[/url]
IvyCounk · August 14, 2022 at 4:52 pm
[url=http://cytotec.cfd/]how to get misoprostol pills[/url] [url=http://prazosin.xyz/]prazosin medicine[/url]
MarvinZem · August 14, 2022 at 5:00 pm
[url=https://cleocin.fun/]clindamycin gel 1 mg[/url]
TeoCounk · August 14, 2022 at 5:21 pm
[url=https://fluconazole.xyz/]diflucan uk price[/url]
ElwoodGon · August 14, 2022 at 5:29 pm
[url=https://vermox.site/]where can i buy vermox tablets[/url]
DavisMug · August 14, 2022 at 5:43 pm
[url=http://citalopram.fun/]buy celexa[/url]
RobertFoold · August 14, 2022 at 5:53 pm
[url=https://amoxicillin.party/]buy amoxicillin from mexico online[/url]
TedCounk · August 14, 2022 at 5:56 pm
[url=https://promethazine.cfd/]phenergan 10mg tablet[/url]
Edgarlor · August 14, 2022 at 5:58 pm
[url=http://prednisolone.boutique/]prednisolone 40mg[/url]
DarrylSef · August 14, 2022 at 5:59 pm
[url=https://prednisolone.boutique/]where can i buy prednisolone tablets[/url] [url=https://celebrex.fun/]celebrex 200 mg price[/url] [url=https://viagrautab.monster/]viagra on women[/url]
TeoCounk · August 14, 2022 at 6:17 pm
[url=https://azithromycin.sbs/]azithromycin 500mg buy[/url]
Estebanguall · August 14, 2022 at 6:29 pm
[url=http://clopidogrel.xyz/]price of plavix[/url]
JackCounk · August 14, 2022 at 6:32 pm
[url=https://levofloxacin.fun/]levaquin cipro[/url]
Michaelemult · August 14, 2022 at 6:44 pm
[url=http://buspar.site/]buspar generic[/url]
RichardFaply · August 14, 2022 at 6:44 pm
[url=http://lyrica.icu/]lyrica 125 mg[/url] [url=http://prednisone.date/]order prednisone online[/url]
YonCounk · August 14, 2022 at 6:53 pm
[url=https://plavix.cfd/]clopidogrel otc[/url]
AshCounk · August 14, 2022 at 6:54 pm
[url=https://budesonide.store/]budesonide prescription[/url] [url=https://viagrattab.monster/]buy real viagra canada[/url] [url=https://propranolol.agency/]propranolol 160 mg daily[/url] [url=https://buyalbuterol.shop/]ventolin brand name[/url] [url=https://propecia.sale/]cheapest finasteride generic[/url] [url=https://cytotec.works/]misoprostol 200 mcg price[/url] [url=https://indocin.store/]indocin generic[/url]
ElwoodGon · August 14, 2022 at 7:09 pm
[url=https://malegra.site/]malegra canada[/url]
MichaelGuabe · August 14, 2022 at 7:20 pm
[url=http://hydroxychloroquine.stream/]hydroxychloroquine 100mg[/url]
PaulCounk · August 14, 2022 at 7:21 pm
[url=https://flagyl.fun/]flagyl 500 mg online pharmacy[/url]
Estebanguall · August 14, 2022 at 7:29 pm
[url=http://nexium.guru/]nexium pharmacy[/url]
MiclTek · August 14, 2022 at 7:43 pm
[url=https://zestoretic.site/]zestoretic 20-25 mg[/url]
DavisMug · August 14, 2022 at 7:46 pm
[url=http://baclofen.fun/]baclofen 20 mg price in india[/url]
Edgarlor · August 14, 2022 at 7:47 pm
[url=http://citalopram.fun/]citalopram 10mg coupon[/url]
AshCounk · August 14, 2022 at 7:50 pm
[url=https://buycipro.shop/]how to order cipro[/url] [url=https://phenergan.digital/]phenergan canada otc[/url] [url=https://acyclovir.solutions/]zovirax 800[/url] [url=https://accutane.boutique/]accutane prescription coupon[/url]
EyeCounk · August 14, 2022 at 7:51 pm
[url=http://fildena.xyz/]fildena 50 mg online[/url] [url=http://levofloxacin.fun/]buy levaquin[/url] [url=http://tadacip.site/]tadacip 20 mg online india[/url] [url=http://viagradtabs.quest/]buy viagra online with paypal[/url] [url=http://estrace.xyz/]where to buy estrace cream[/url]
IvyCounk · August 14, 2022 at 7:58 pm
[url=http://trental.cfd/]buy trental 400 mg online india[/url] [url=http://hydroxychloroquine.sbs/]plaquenil 200 mg[/url] [url=http://augmentin.xyz/]amoxicillin drug[/url]
JudyCounk · August 14, 2022 at 8:06 pm
[url=https://prazosin.xyz/]prazosin 5[/url]
JoeCounk · August 14, 2022 at 8:07 pm
[url=https://trimox.fun/]amoxicillin cost australia[/url] [url=https://amoxil.site/]can you buy augmentin over the counter[/url] [url=https://hydroxychloroquine.media/]buy plaquenil from canada[/url] [url=https://advair.site/]online pharmacy advair[/url]
EyeCounk · August 14, 2022 at 8:12 pm
[url=http://estrace.xyz/]price of estrace cream[/url] [url=http://tadacip.site/]tadacip uk[/url] [url=http://promethazine.site/]phenergan 50 mg[/url] [url=http://albendazole.run/]buy albendazole 400 mg uk[/url] [url=http://tretinoin.fun/]retin a singapore[/url] [url=http://paxil.click/]paxil generic price[/url]
UgoCounk · August 14, 2022 at 8:17 pm
[url=http://albuterol.best/]albuterol 1.25[/url]
TimothyThive · August 14, 2022 at 8:32 pm
[url=http://plavix.site/]clopidogrel generic cost[/url]
PaulCounk · August 14, 2022 at 8:40 pm
[url=https://strattera.life/]strattera online pharmacy[/url]
EvaCounk · August 14, 2022 at 8:45 pm
[url=http://aurogra.xyz/]aurogra 100 mg[/url]
AmyCounk · August 14, 2022 at 8:57 pm
[url=https://motilium.site/]where can you buy motilium[/url]
WilliamWem · August 14, 2022 at 8:57 pm
[url=https://celebrex.fun/]celebrex 209 mg[/url] [url=https://tetracycline.fun/]tetracycline otc[/url] [url=https://lisinopril.beauty/]zestril 40[/url]
JudyCounk · August 14, 2022 at 8:59 pm
[url=https://acyclovir.sbs/]buy acyclovir 800 mg online[/url]
Estebanguall · August 14, 2022 at 8:59 pm
[url=http://cleocin.fun/]cheap clindamycin[/url]
BooCounk · August 14, 2022 at 9:04 pm
[url=https://lisinoprilx.com/]20 mg lisinopril without a prescription[/url]
Charlesaduse · August 14, 2022 at 9:12 pm
[url=http://cialisptabs.quest/]10mg cialis[/url]
RobertFoold · August 14, 2022 at 9:14 pm
[url=https://albenza.site/]buy albendazole tablets uk[/url]
JimCounk · August 14, 2022 at 9:29 pm
[url=https://hydroxychloroquine.sbs/]quineprox 500 mg[/url]
MarvinZem · August 14, 2022 at 9:45 pm
[url=https://erectafil.site/]erectafil 10 mg[/url]
JackCounk · August 14, 2022 at 9:46 pm
[url=https://fildena.xyz/]fildena 100 mg online[/url]
KiaCounk · August 14, 2022 at 9:51 pm
[url=http://tretinoin.fun/]retin a canada pharmacy[/url]
CarlCounk · August 14, 2022 at 9:53 pm
[url=https://hydrochlorothiazide.fun/]hydrochlorothiazide canada[/url]
MarvinZem · August 14, 2022 at 9:57 pm
[url=https://albendazole.xyz/]albendazole over the counter[/url]
NickCounk · August 14, 2022 at 9:59 pm
[url=http://trazodone.loan/]trazodone price canada[/url]
MiaCounk · August 14, 2022 at 10:08 pm
[url=http://hydrochlorothiazide.fun/]hydrochlorothiazide 50mg[/url]
TommyHepsy · August 14, 2022 at 10:14 pm
[url=https://zestoretic.site/]zestoretic 20 12.5[/url]
JosephMaict · August 14, 2022 at 10:33 pm
[url=http://lopressor.site/]lopressor 5[/url] [url=http://baclofen.business/]6 baclofen[/url] [url=http://zoloft.click/]sertraline without a prescription[/url] [url=http://lyrica.icu/]lyrica medicine price[/url] [url=http://escitalopram.fun/]generic lexapro 10 mg cost[/url]
KimCounk · August 14, 2022 at 10:45 pm
[url=https://levofloxacin.fun/]levaquin price[/url]
MiclTek · August 14, 2022 at 10:47 pm
[url=https://prednisolone.run/]prednisolone buy uk[/url]
MichaelDwego · August 14, 2022 at 10:48 pm
[url=https://plavix.site/]clopidogrel 300 mg tablet[/url]
MiclTek · August 14, 2022 at 10:49 pm
[url=https://sumycin.xyz/]tetracycline 250 mg capsules[/url]
WimCounk · August 14, 2022 at 10:52 pm
[url=http://aurogra.shop/]aurogra 100 prices[/url]
IvyCounk · August 14, 2022 at 10:54 pm
[url=http://albendazole.run/]albendazole online[/url] [url=http://estrace.xyz/]estrace canadian[/url] [url=http://zoloft.fun/]cost of zoloft 50 mg[/url] [url=http://amoxil.site/]amoxicillin no prescription[/url] [url=http://strattera.life/]canadian pharmacy generic strattera[/url] [url=http://toradol.xyz/]generic toradol price[/url]
WilliamWem · August 14, 2022 at 11:03 pm
[url=https://cialisptabs.quest/]where to buy over the counter cialis[/url] [url=https://buspar.site/]30 mg buspar[/url]
DarrylSef · August 14, 2022 at 11:11 pm
[url=https://tetracycline.fun/]terramycin cream where to buy[/url] [url=https://viagrautab.monster/]cheap viagra tablets uk[/url] [url=https://albenza.site/]albenza costs[/url] [url=https://escitalopram.fun/]generic lexapro india[/url] [url=https://prednisolone.boutique/]rx from canada prednisolone[/url] [url=https://elimite.cfd/]elimite canada[/url] [url=https://prednisone.date/]80 mg prednisone[/url]
MiclTek · August 14, 2022 at 11:11 pm
[url=https://buspar.site/]buspar[/url]
RichardFaply · August 14, 2022 at 11:13 pm
[url=http://ciprofloxacin.site/]cipro medication over the counter[/url] [url=http://sumycin.site/]tetracycline brand name[/url] [url=http://atarax.fun/]generic atarax 25mg[/url] [url=http://cialisvtab.monster/]cialis price mexico[/url]
SueCounk · August 14, 2022 at 11:29 pm
[url=http://azithromycin.sbs/]azithromycin 500 mg tablet price india[/url]
Michaelemult · August 14, 2022 at 11:31 pm
[url=http://lisinopril.beauty/]cheap lisinopril[/url]
ZakCounk · August 14, 2022 at 11:33 pm
[url=https://fildena.xyz/]fildena 100 canada[/url] [url=https://amoxil.site/]amoxicillin 875 pill price[/url] [url=https://motilium.site/]buy motilium us[/url] [url=https://tretinoin.fun/]buy tretinoin without prescription[/url] [url=https://estrace.xyz/]estrace discount[/url] [url=https://levofloxacin.fun/]cost of levaquin[/url] [url=https://flomax.fun/]flomax best price[/url] [url=https://retina.run/]retin a cream without prescription[/url]
JackCounk · August 14, 2022 at 11:35 pm
[url=https://levofloxacin.fun/]buy levaquin online[/url]
Edgarlor · August 14, 2022 at 11:42 pm
[url=http://vardenafil.men/]generic levitra from canada[/url]
Michaelemult · August 14, 2022 at 11:51 pm
[url=http://amoxicillin.business/]amoxil 500 mg[/url]
AlanCounk · August 14, 2022 at 11:53 pm
[url=https://fildena.xyz/]buy fildena 50mg[/url] [url=https://tadacip.site/]tadacip cipla[/url] [url=https://cephalexin.fun/]cephalexin capsules 500mg price in india[/url] [url=https://fluconazole.xyz/]diflucan 150 mg over the counter[/url]
AnnaCounk · August 15, 2022 at 12:13 am
[url=http://tizanidine.fun/]tizanidine cost prescription[/url]
JaneCounk · August 15, 2022 at 12:25 am
[url=http://strattera.life/]120 mg strattera[/url]
EyeCounk · August 15, 2022 at 12:32 am
[url=http://kamagra.live/]kamagra oral jelly bangkok[/url] [url=http://tadalafil.moscow/]can i buy cialis in canada over the counter[/url] [url=http://effexor.fun/]order effexor[/url] [url=http://trimox.fun/]rx amoxicillin[/url] [url=http://augmentin.xyz/]amoxicillin 500 mg where to buy[/url]
MarvinZem · August 15, 2022 at 12:34 am
[url=https://citalopram.fun/]citalopram 10 mg tablets[/url]
MichaelGuabe · August 15, 2022 at 12:42 am
[url=http://celebrex.fun/]celebrex rx[/url]
BooCounk · August 15, 2022 at 12:45 am
[url=https://ddrpill.com/]oder trazadone for sleeping[/url]
RichardFaply · August 15, 2022 at 12:55 am
[url=http://anafranil.xyz/]anafranil drug[/url] [url=http://singulair.site/]singulair for copd[/url] [url=http://lyrica.icu/]lyrica mexico pharmacy[/url] [url=http://elimite.cfd/]acticin 650[/url]
ElwoodGon · August 15, 2022 at 1:01 am
[url=https://tetracycline.fun/]terramycin free shipping[/url]
RodneyTab · August 15, 2022 at 1:04 am
[url=http://plavix.site/]medicine clopidogrel 75 mg[/url]
JimCounk · August 15, 2022 at 1:07 am
[url=https://retina.run/]order retin a[/url]
ElwoodGon · August 15, 2022 at 1:21 am
[url=https://cleocin.fun/]clindamycin buy uk[/url]
TeoCounk · August 15, 2022 at 1:25 am
[url=https://estrace.xyz/]estrace cream generic equivalent[/url]
KimCounk · August 15, 2022 at 1:27 am
[url=https://trimox.fun/]buy amoxicillin online uk paypal[/url]
MarkCounk · August 15, 2022 at 1:30 am
[url=https://fluconazole.xyz/]diflucan 2 pills[/url]
PaulCounk · August 15, 2022 at 1:38 am
[url=https://aurogra.xyz/]aurogra 100 prices[/url]
DarrylSef · August 15, 2022 at 1:39 am
[url=https://atarax.fun/]atarax for dogs[/url] [url=https://sumycin.site/]tetracycline tablet[/url] [url=https://propranolol.site/]inderal 160 mg capsule[/url] [url=https://sumycin.xyz/]tetracycline cost uk[/url] [url=https://clopidogrel.xyz/]plavix 75 mg[/url] [url=https://valtrex.click/]buy valtrex without get a prescription online[/url] [url=https://albenza.site/]albendazole brand name canada[/url] [url=https://amoxicillin.business/]augmentin 325 mg[/url]
TedCounk · August 15, 2022 at 1:46 am
[url=https://trazodone.loan/]buy trazodone 150 mg[/url]
DarrylSef · August 15, 2022 at 1:57 am
[url=https://amoxicillin.party/]cheap amoxicillin 500mg online[/url] [url=https://amoxicillin.business/]amoxicillin 250 mg capsule price[/url]
Charlesaduse · August 15, 2022 at 2:10 am
[url=http://zestoretic.site/]zestoretic 20 mg[/url]
Davidhup · August 15, 2022 at 2:13 am
[url=https://metformin.bid/]metformin generic price[/url]
DarrylSef · August 15, 2022 at 2:18 am
[url=https://malegra.site/]malegra dxt tablets[/url] [url=https://antabuse.fun/]antabuse online canada[/url] [url=https://sumycin.xyz/]tetracycline capsule[/url] [url=https://nexium.guru/]can you buy nexium tablets over the counter[/url] [url=https://baclofen.business/]lioresal without prescription[/url]
ElwoodGon · August 15, 2022 at 2:19 am
[url=https://anafranil.xyz/]anafranil 25 tablet[/url]
MichaelGuabe · August 15, 2022 at 2:21 am
[url=http://lisinopril.beauty/]lisinopril 20 mg india[/url]
KimCounk · August 15, 2022 at 2:30 am
[url=https://viagradtabs.quest/]150 mg viagra[/url]
JasonCounk · August 15, 2022 at 2:36 am
[url=http://augmentin.xyz/]amoxicillin 875 coupon[/url]
Samuelraisk · August 15, 2022 at 2:43 am
[url=http://lisinopril.beauty/]lisinopril 2.5 pill[/url]
JasonCounk · August 15, 2022 at 2:46 am
[url=http://drugstore.fun/]best rx pharmacy online[/url]
SueCounk · August 15, 2022 at 2:46 am
[url=http://hydroxychloroquine.sbs/]plaquenil generic drug[/url]
Michaeldrist · August 15, 2022 at 2:48 am
[url=https://lisinopril.beauty/]zestoretic 20 25[/url]
WimCounk · August 15, 2022 at 2:51 am
[url=http://acyclovir.boutique/]order generic acyclovir[/url]
Curtisvibia · August 15, 2022 at 3:19 am
[url=https://zoloft.click/]zoloft buy canada[/url]
DenCounk · August 15, 2022 at 3:21 am
[url=http://amoxil.site/]augmentin buy online uk[/url]
MiclTek · August 15, 2022 at 3:22 am
[url=https://provigil.xyz/]buy modafinil australia[/url]
IvyCounk · August 15, 2022 at 3:32 am
[url=http://hydrochlorothiazide.site/]zestoretic 20 mg[/url] [url=http://levofloxacin.fun/]levaquin antibiotics[/url] [url=http://plavix.cfd/]generic plavix usa[/url]
TeoCounk · August 15, 2022 at 3:34 am
[url=https://wellbutrin.life/]bupropion generic[/url]
DarrylSef · August 15, 2022 at 3:45 am
[url=https://citalopram.fun/]can i buy celexa online[/url] [url=https://escitalopram.fun/]generic lexapro[/url] [url=https://valtrex.click/]zovirax valtrex[/url] [url=https://amoxicillin.business/]amoxicillin price in india[/url] [url=https://cialisvtab.monster/]buy tadalafil 20mg price in india[/url]
ElwoodGon · August 15, 2022 at 3:47 am
[url=https://ampicillin.sbs/]ampicillin pill 500mg[/url]
YonCounk · August 15, 2022 at 3:52 am
[url=https://paxil.click/]where can i get brand name paxil[/url]
JudyCounk · August 15, 2022 at 3:54 am
[url=https://promethazine.cfd/]phenergan over the counter[/url]
ElwoodGon · August 15, 2022 at 4:08 am
[url=https://valtrex.click/]valtrex pills where to buy[/url]
EyeCounk · August 15, 2022 at 4:15 am
[url=http://tadacip.site/]buy tadacip 20[/url] [url=http://azithromycin.sbs/]azithromycin over the counter australia[/url] [url=http://fluconazole.xyz/]diflucan buy nz[/url] [url=http://wellbutrin.life/]purchase wellbutrin online[/url] [url=http://flagyl.fun/]flagyl generic[/url] [url=http://trimox.fun/]prescription amoxicillin 500mg[/url]
SueCounk · August 15, 2022 at 4:21 am
[url=http://hydrochlorothiazide.fun/]hydrochlorothiazide 50 mg tablet[/url]
SueCounk · August 15, 2022 at 4:36 am
[url=http://acyclovir.sbs/]acyclovir cream prescription[/url]
MiaCounk · August 15, 2022 at 4:40 am
[url=http://flagyl.fun/]buy flagyl without prescription[/url]
Michaeldrist · August 15, 2022 at 4:43 am
[url=https://anafranil.xyz/]anafranil uk[/url]
RobertFoold · August 15, 2022 at 4:49 am
[url=https://baclofen.fun/]baclofen generic brand[/url]
CarlCounk · August 15, 2022 at 5:08 am
[url=https://cephalexin.works/]keflex for ear infections[/url]
EvaCounk · August 15, 2022 at 5:11 am
[url=http://plavix.cfd/]plavix 75 mg canada[/url]
SamCounk · August 15, 2022 at 5:15 am
[url=http://zoloft.fun/]zoloft in europe[/url] [url=http://glucophage.fun/]buy metformin 1000 mg uk[/url] [url=http://tadalafil.team/]chewing cialis tablets[/url] [url=http://hydroxychloroquine.media/]hydroxychloroquine sulfate tabs 200mg[/url] [url=http://effexor.fun/]effexor medication[/url]
TommyHepsy · August 15, 2022 at 5:26 am
[url=https://viagrautab.monster/]sildenafil price[/url]
Estebanguall · August 15, 2022 at 5:26 am
[url=http://lisinopril.beauty/]buy lisinopril online canada[/url]
LisaCounk · August 15, 2022 at 5:31 am
[url=https://drugstore.fun/]canadian pharmacy meds[/url]
ZakCounk · August 15, 2022 at 5:32 am
[url=https://promethazine.site/]phenergan nz[/url] [url=https://trental.cfd/]trental 400 mg[/url] [url=https://glucophage.fun/]metformin 100 tablet[/url] [url=https://chloroquine.boutique/]chloroquine tablets cost[/url] [url=https://estrace.xyz/]can you buy estrace over the counter[/url] [url=https://albendazole.run/]albendazole buy online[/url] [url=https://tadalafil.team/]cialis pill price in india[/url] [url=https://bactrim.sbs/]bactrim ds 800 160 tab[/url]
MaryCounk · August 15, 2022 at 5:50 am
[url=https://cytotec.cfd/]misoprostol online canada[/url] [url=https://metformin.fun/]metformin india[/url] [url=https://promethazine.site/]phenergan prescription australia[/url]
AmyCounk · August 15, 2022 at 5:59 am
[url=https://viagradtabs.quest/]where can you buy viagra pills[/url]
TimothyThive · August 15, 2022 at 6:04 am
[url=http://buspar.site/]buspar 10mg cost[/url]
MaryCounk · August 15, 2022 at 6:04 am
[url=https://flomax.fun/]flomax generic otc[/url] [url=https://hydrochlorothiazide.fun/]hydrochlorothiazide purchase online[/url] [url=https://fildena.xyz/]fildena 120[/url] [url=https://paxil.click/]paxil insomnia[/url]
TedCounk · August 15, 2022 at 6:06 am
[url=https://tizanidine.fun/]tizanidine capsules[/url]
Jameseloro · August 15, 2022 at 6:10 am
[url=http://valtrex.click/]valtrex capsules[/url] [url=http://citalopram.fun/]citalopram 20mg online[/url]
Estebanguall · August 15, 2022 at 6:13 am
[url=http://strattera.fun/]strattera prescription cost[/url]
MarvinZem · August 15, 2022 at 6:25 am
[url=https://ampicillin.sbs/]ampicillin 250 mg[/url]
Jameseloro · August 15, 2022 at 6:29 am
[url=http://nexium.guru/]nexium prescription coupon[/url] [url=http://propranolol.site/]propranolol brand[/url] [url=http://amoxicillin.party/]buy amoxicilina 500 mg[/url] [url=http://cialisptabs.quest/]cheap generic cialis canadian pharmacy[/url] [url=http://lopressor.site/]lopressor for afib[/url] [url=http://prednisone.date/]deltasone 25mg from canada[/url]
JaneCounk · August 15, 2022 at 6:33 am
[url=http://zoloft.fun/]zoloft 5mg[/url]
JoeCounk · August 15, 2022 at 6:33 am
[url=https://hydroxychloroquine.media/]plaquenil 800 mg[/url] [url=https://hydroxychloroquine.sbs/]hydroxychloroquine 0.5[/url]
KimCounk · August 15, 2022 at 6:37 am
[url=https://advair.site/]advair price canada[/url]
Jameseloro · August 15, 2022 at 6:56 am
[url=http://ampicillin.sbs/]ampicillin 250 mg tablet[/url] [url=http://dexamethasone.cfd/]dexamethasone price[/url] [url=http://atarax.fun/]atarax 500mg[/url]
ZakCounk · August 15, 2022 at 6:57 am
[url=https://tadacip.site/]tadacip 10 mg price in india[/url] [url=https://cephalexin.fun/]cephalexin 150 mg[/url] [url=https://trazodone.site/]desyrel medication[/url] [url=https://cephalexin.works/]cephalexin tablets brand name[/url]
SueCounk · August 15, 2022 at 7:03 am
[url=http://tizanidine.fun/]buy generic tizanidine[/url]
KiaCounk · August 15, 2022 at 7:12 am
[url=http://trental.cfd/]trental 400 mg online buy[/url]
Edgarlor · August 15, 2022 at 7:19 am
[url=http://viagrautab.monster/]female viagra online australia[/url]
Curtisvibia · August 15, 2022 at 7:28 am
[url=https://atarax.fun/]200 mg atarax[/url]
RichardFaply · August 15, 2022 at 7:42 am
[url=http://baclofen.business/]baclofen pills[/url] [url=http://escitalopram.fun/]lexapro capsules[/url] [url=http://amoxicillin.party/]amoxicillin price india[/url] [url=http://dexamethasone.cfd/]dexamethasone 2mg tablets price[/url] [url=http://plavix.site/]plavix india[/url]
AlanCounk · August 15, 2022 at 7:43 am
[url=https://tretinoin.fun/]where can i buy retin a cream uk[/url] [url=https://fildena.xyz/]fildena 100[/url] [url=https://hydroxychloroquine.sbs/]order plaquenil[/url]
AshCounk · August 15, 2022 at 7:45 am
[url=https://buyamoxicilin.com/]buy augmentin online usa[/url] [url=https://robaxin.digital/]robaxin tablets price[/url] [url=https://propranol.com/]buy propranolol 40 mg[/url] [url=https://diflucan.best/]diflucan fluconazole[/url] [url=https://modafinil.email/]modafinil 2020[/url] [url=https://robaxin1.com/]buy robaxin 750 mg[/url] [url=https://buyzestoretic.com/]zestoretic 10 12.5 mg[/url]
IvyCounk · August 15, 2022 at 7:57 am
[url=http://fluconazole.xyz/]diflucan tablet cost[/url] [url=http://chloroquine.boutique/]resochina[/url] [url=http://toradol.xyz/]toradol pill prices[/url] [url=http://duloxetine.fun/]cymbalta coupon 30 mg[/url] [url=http://wellbutrin.life/]wellbutrin generic price[/url] [url=http://kamagra.live/]super kamagra jelly[/url]
Estebanguall · August 15, 2022 at 7:58 am
[url=http://zoloft.business/]generic zoloft for sale[/url]
WimCounk · August 15, 2022 at 8:00 am
[url=http://trazodone.shop/]where can i buy trazodone online[/url]
MarvinZem · August 15, 2022 at 8:06 am
[url=https://strattera.fun/]buy strattera in mexico[/url]
JosephMaict · August 15, 2022 at 8:08 am
[url=http://lyrica.icu/]generic lyrica usa[/url] [url=http://lopressor.site/]lopressor 75 mg[/url] [url=http://viagrautab.monster/]how to get viagra tablets in india[/url] [url=http://albenza.site/]order albendazole[/url] [url=http://clopidogrel.xyz/]clopidogrel cost uk[/url]
JosephMaict · August 15, 2022 at 8:19 am
[url=http://strattera.fun/]generic for strattera[/url] [url=http://clopidogrel.xyz/]clopidogrel 300[/url] [url=http://nexium.guru/]nexium 20mg otc[/url] [url=http://atarax.fun/]50 mg atarax[/url] [url=http://cialisvtab.monster/]cialis 5 mg tablet generic[/url]
MarvinZem · August 15, 2022 at 8:24 am
[url=https://escitalopram.fun/]lexapro no prescription[/url]
MichaelGuabe · August 15, 2022 at 8:31 am
[url=http://plavix.site/]plavix cost[/url]
MarvinZem · August 15, 2022 at 8:33 am
[url=https://lopressor.site/]100 mg lopressor[/url]
MarkCounk · August 15, 2022 at 8:33 am
[url=https://flagyl.fun/]flagyl generic brand[/url]
NickCounk · August 15, 2022 at 8:36 am
[url=http://drugstore.fun/]mail order pharmacy[/url]
ZakCounk · August 15, 2022 at 8:42 am
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide 12.5 mg for sale[/url] [url=https://zoloft.fun/]zoloft coupon[/url]
RodneyTab · August 15, 2022 at 8:44 am
[url=http://singulair.site/]price of singulair 10 mg[/url]
JoeCounk · August 15, 2022 at 8:51 am
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide where to buy[/url] [url=https://amoxil.site/]amoxicillin brand name[/url] [url=https://tadalafil.team/]cialis over the counter[/url] [url=https://tadacip.site/]buy tadacip 20 india[/url] [url=https://augmentin.xyz/]amoxil cost[/url] [url=https://promethazine.site/]phenergan 12.5 mg tablets[/url] [url=https://metformin.fun/]metformin buy australia[/url] [url=https://effexor.fun/]effexor 37.5 mg tablets[/url]
DenCounk · August 15, 2022 at 8:56 am
[url=http://viagradtabs.quest/]60 mg sildenafil[/url]
NickCounk · August 15, 2022 at 8:57 am
[url=http://trimox.fun/]amoxicillin 4[/url]
IvyCounk · August 15, 2022 at 8:58 am
[url=http://motilium.site/]buying motilium online uk[/url] [url=http://amoxil.site/]augmentin 650 price[/url] [url=http://estrace.xyz/]estrace 2mg tablets price[/url] [url=http://levofloxacin.fun/]levaquin 500 mg[/url] [url=http://trazodone.loan/]buy trazodone not generic without a prescription[/url] [url=http://flagyl.fun/]generic flagyl online[/url] [url=http://cephalexin.fun/]keflex for sale without prescription[/url] [url=http://acyclovir.sbs/]where can i get zovirax[/url]
Michaelemult · August 15, 2022 at 9:04 am
[url=http://citalopram.fun/]citalopram coupon[/url]
Estebanguall · August 15, 2022 at 9:07 am
[url=http://strattera.fun/]strattera generic coupon[/url]
MarkCounk · August 15, 2022 at 9:31 am
[url=https://viagradtabs.quest/]best viagra tablets in india online[/url]
Curtisvibia · August 15, 2022 at 9:37 am
[url=https://vermox.site/]vermox 500mg tablet price[/url]
DarrylSef · August 15, 2022 at 9:47 am
[url=https://baclofen.fun/]order baclofen online[/url] [url=https://propranolol.site/]inderal drug[/url] [url=https://antabuse.fun/]antabus[/url] [url=https://cleocin.fun/]cleocin for sinus infection[/url]
DavisMug · August 15, 2022 at 9:47 am
[url=http://aurogra.life/]buy aurogra 100[/url]
MichaelDwego · August 15, 2022 at 9:50 am
[url=https://prednisolone.run/]cheap prednisolone[/url]
MaryCounk · August 15, 2022 at 9:57 am
[url=https://fildena.xyz/]fildena online pharmacy[/url] [url=https://femaleviagra.cfd/]viagra online cheap no prescription[/url] [url=https://augmentin.xyz/]where to buy amoxil[/url] [url=https://bactrim.sbs/]bactrim online without rx[/url] [url=https://trazodone.loan/]buy trazodone online[/url] [url=https://hydroxychloroquine.media/]plaquenil 50mg[/url] [url=https://paxil.click/]paroxetine 40[/url]
Edgarlor · August 15, 2022 at 10:18 am
[url=http://citalopram.fun/]buy citalopram[/url]
SamCounk · August 15, 2022 at 10:32 am
[url=http://fluconazole.xyz/]diflucan buy[/url] [url=http://advair.site/]purchase advair from canada[/url] [url=http://cephalexin.works/]cephalexin in uk[/url] [url=http://fildena.xyz/]buy fildena india[/url] [url=http://cytotec.cfd/]cytotec[/url] [url=http://tizanidine.fun/]zanaflex 4mg cost[/url]
RichardFaply · August 15, 2022 at 10:33 am
[url=http://cialisvtab.monster/]cheap cialis online canadian pharmacy[/url] [url=http://atarax.fun/]atarax 150 mg[/url] [url=http://aurogra.life/]aurogra[/url]
MaryCounk · August 15, 2022 at 10:46 am
[url=https://tretinoin.fun/]retin a 0.25[/url] [url=https://aurogra.xyz/]buy aurogra 100[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg pill[/url] [url=https://tizanidine.fun/]tizanidine tab 4mg[/url]
TimothyThive · August 15, 2022 at 10:47 am
[url=http://valtrex.click/]where can you buy valtrex over the counter[/url]
RicIsose · August 15, 2022 at 10:59 am
[url=https://nexium.guru/]nexium magnesium[/url] [url=https://cleocin.fun/]clindamycin 2 coupon[/url] [url=https://buspar.site/]buspar 10mg price[/url] [url=https://amoxicillin.business/]order amoxicillin online no prescription[/url] [url=https://prednisolone.boutique/]prednisolone cost in india[/url] [url=https://provigil.xyz/]provigil from india[/url] [url=https://vardenafil.men/]purchase vardenafil[/url]
Curtisvibia · August 15, 2022 at 11:09 am
[url=https://malegra.site/]malegra fxt 140 mg[/url]
Michaeldrist · August 15, 2022 at 11:16 am
[url=https://cleocin.fun/]clindamycin gel 1[/url]
Jameseloro · August 15, 2022 at 11:19 am
[url=http://escitalopram.fun/]lexapro online prescription[/url] [url=http://celebrex.fun/]celebrex otc[/url] [url=http://citalopram.fun/]generic celexa price[/url]
JaneCounk · August 15, 2022 at 11:25 am
[url=http://motilium.site/]buy motilium online usa[/url]
Edgarlor · August 15, 2022 at 11:26 am
[url=http://zoloft.click/]buy zoloft generic online[/url]
EvaCounk · August 15, 2022 at 11:34 am
[url=http://drugstore.fun/]canadian pharmacy online ship to usa[/url]
RobertFoold · August 15, 2022 at 11:39 am
[url=https://cleocin.fun/]cleocin t pledgets[/url]
CarlCounk · August 15, 2022 at 11:43 am
[url=https://augmentin.xyz/]can you buy amoxicillin without a prescription[/url]
IvyCounk · August 15, 2022 at 12:04 pm
[url=http://albendazole.run/]albenza 200 mg cost[/url] [url=http://cytotec.cfd/]buy cytotec online fast delivery uk[/url]
BooCounk · August 15, 2022 at 12:13 pm
[url=https://clonidine.boutique/]how to get clonidine[/url]
Michaeldrist · August 15, 2022 at 12:19 pm
[url=https://elimite.cfd/]elimite 5 cream price[/url]
ZakCounk · August 15, 2022 at 12:38 pm
[url=https://aurogra.xyz/]aurogra[/url] [url=https://prazosin.xyz/]prazosin for bph[/url]
RicIsose · August 15, 2022 at 12:39 pm
[url=https://citalopram.fun/]celexa 15 mg[/url] [url=https://advair.fun/]advair diskus from mexico[/url] [url=https://ampicillin.sbs/]ampicillin 500[/url]
JaneCounk · August 15, 2022 at 12:42 pm
[url=http://tretinoin.fun/]online tretinoin prescription[/url]
KiaCounk · August 15, 2022 at 12:46 pm
[url=http://strattera.life/]strattera 18[/url]
RichardFaply · August 15, 2022 at 12:47 pm
[url=http://cialisptabs.quest/]tadalafil 5 mg coupon[/url] [url=http://prednisone.date/]prednisone without a rx[/url] [url=http://anafranil.xyz/]anafranil online india[/url] [url=http://valtrex.click/]valtrex cream over the counter[/url] [url=http://singulair.site/]singulair buy[/url]
DarrylSef · August 15, 2022 at 1:01 pm
[url=https://tetracycline.fun/]tetracycline without prescriptions[/url] [url=https://atarax.fun/]atarax buy[/url] [url=https://propranolol.site/]propranolol brand india[/url] [url=https://zestoretic.site/]zestoretic price[/url] [url=https://tizanidine.site/]tizanidine 6 mg cap[/url]
RodneyTab · August 15, 2022 at 1:18 pm
[url=http://erectafil.site/]erectafil 40[/url]
MarkCounk · August 15, 2022 at 1:18 pm
[url=https://duloxetine.fun/]cymbalta prescription cost[/url]
Michaeldrist · August 15, 2022 at 1:21 pm
[url=https://singulair.site/]over the counter singulair[/url]
Michaelemult · August 15, 2022 at 1:23 pm
[url=http://zoloft.click/]zoloft nz[/url]
CarlCounk · August 15, 2022 at 1:25 pm
[url=https://motilium.site/]where to buy motilium 10mg[/url]
JimCounk · August 15, 2022 at 1:28 pm
[url=https://femaleviagra.cfd/]best price genuine viagra[/url]
TeoCounk · August 15, 2022 at 1:28 pm
[url=https://tadalafil.moscow/]cialis 2.5 mg cost[/url]
DenCounk · August 15, 2022 at 1:29 pm
[url=http://strattera.life/]strattera cap 10mg[/url]
AshCounk · August 15, 2022 at 1:39 pm
[url=https://antabusedisulf.com/]antabuse 250 mg online[/url] [url=https://propranolol.agency/]innopran xl 80 mg[/url] [url=https://zmtpills.com/]generic for rhinocort aqua nasal spray[/url] [url=https://buyfinpecia.shop/]propecia purchase[/url] [url=https://lisinopril.email/]buy lisinopril 2.5 mg[/url] [url=https://buyaccutane.store/]accutane online prescription cost[/url]
UgoCounk · August 15, 2022 at 1:41 pm
[url=http://albenza.boutique/]albendazole sale[/url]
Samuelraisk · August 15, 2022 at 1:51 pm
[url=http://dexamethasone.cfd/]dexamethasone buy uk[/url]
Curtisvibia · August 15, 2022 at 2:09 pm
[url=https://albendazole.xyz/]is albenza over the counter[/url]
AshCounk · August 15, 2022 at 2:26 pm
[url=https://budesonide.store/]budesonide[/url] [url=https://zoloft.best/]buy zoloft generic online[/url] [url=https://celexa.boutique/]citalopram hbr 20[/url]
MiaCounk · August 15, 2022 at 2:28 pm
[url=http://trazodone.loan/]buy trazodone online usa[/url]
WilliamWem · August 15, 2022 at 2:32 pm
[url=https://clopidogrel.xyz/]plavix price comparison[/url] [url=https://viagrautab.monster/]generic sildenafil 40 mg[/url] [url=https://propranolol.site/]propranolol 10 mg daily[/url]
UgoCounk · August 15, 2022 at 2:51 pm
[url=http://retina.boutique/]retin a cream in india[/url]
UgoCounk · August 15, 2022 at 2:57 pm
[url=http://tenormin.works/]tenormin buy[/url]
Jameseloro · August 15, 2022 at 3:10 pm
[url=http://advair.fun/]price of advair diskus[/url] [url=http://prednisone.date/]prednisone 5[/url] [url=http://plavix.site/]drug plavix 75 mg[/url] [url=http://celebrex.fun/]buy celebrex nz[/url] [url=http://amoxicillin.business/]amoxicillin 875 mg[/url]
MiaCounk · August 15, 2022 at 3:11 pm
[url=http://cephalexin.fun/]21 cephalexin 500mg[/url]
Samuelraisk · August 15, 2022 at 3:15 pm
[url=http://baclofen.fun/]baclofen tablet[/url]
RobertFoold · August 15, 2022 at 3:20 pm
[url=https://ciprofloxacin.site/]ciprofloxacin 500mg tablets price in india[/url]
IvyCounk · August 15, 2022 at 3:24 pm
[url=http://tadacip.site/]tadacip 10 mg[/url] [url=http://zoloft.fun/]setraline purchase[/url] [url=http://tretinoin.fun/]buying retin a online in canada[/url] [url=http://drugstore.fun/]promo code for canadian pharmacy meds[/url] [url=http://glucophage.fun/]metformin 3000 mg[/url] [url=http://metformin.fun/]where to buy glucophage online[/url] [url=http://plavix.cfd/]medication plavix[/url] [url=http://hydrochlorothiazide.fun/]best price hydrochlorothiazide[/url]
JosephMaict · August 15, 2022 at 3:27 pm
[url=http://amoxicillin.party/]amoxicillin 500 mg[/url] [url=http://provigil.xyz/]buy modafinil pills online[/url]
MarvinZem · August 15, 2022 at 3:30 pm
[url=https://vermox.site/]90 vermox[/url]
TedCounk · August 15, 2022 at 3:35 pm
[url=https://bactrim.sbs/]buy bactrim ds[/url]
DenCounk · August 15, 2022 at 3:49 pm
[url=http://kamagra.live/]kamagra jelly from india[/url]
IvyCounk · August 15, 2022 at 3:53 pm
[url=http://cytotec.cfd/]cytotec medication[/url] [url=http://paxil.click/]paxil ssri[/url] [url=http://flagyl.fun/]buy generic flagyl[/url] [url=http://strattera.life/]strattera 40 mg pills generic[/url] [url=http://tretinoin.fun/]buy tretinoin online uk[/url] [url=http://estrace.xyz/]estrace 01 cream cost[/url] [url=http://aurogra.xyz/]aurogra 100mg tablets[/url] [url=http://trazodone.site/]trazodone 150 mg pill[/url]
Michaeldrist · August 15, 2022 at 3:57 pm
[url=https://anafranil.xyz/]anafranil 10mg tablets[/url]
SamCounk · August 15, 2022 at 4:03 pm
[url=http://bactrim.sbs/]bactrim in mexico[/url] [url=http://promethazine.site/]can you buy phenergan over the counter[/url] [url=http://plavix.cfd/]how much is plavix in canada[/url] [url=http://tadalafil.moscow/]buy generic cialis online europe[/url]
MiclTek · August 15, 2022 at 4:09 pm
[url=https://clopidogrel.xyz/]plavix price in india[/url]
Curtisvibia · August 15, 2022 at 4:23 pm
[url=https://anafranil.xyz/]anafranil prices[/url]
AshCounk · August 15, 2022 at 4:26 pm
[url=https://hydrochlorothiazide.guru/]zestoretic 20 12.5[/url] [url=https://clonidine.shop/]how much is clonidine[/url] [url=https://diflucan247.com/]order diflucan online[/url]
DarrylSef · August 15, 2022 at 4:27 pm
[url=https://zestoretic.site/]zestoretic medication[/url] [url=https://lisinopril.beauty/]lisinopril 5 mg[/url]
MaryCounk · August 15, 2022 at 4:40 pm
[url=https://effexor.fun/]effexor generic[/url] [url=https://tadalafil.team/]generic tadalafil coupon[/url] [url=https://trazodone.loan/]desyrel 50 mg tablet[/url] [url=https://levofloxacin.fun/]antibiotic levaquin[/url] [url=https://plavix.cfd/]clopidogrel 75 mg coupon[/url] [url=https://drugstore.fun/]no prescription needed pharmacy[/url] [url=https://hydrochlorothiazide.site/]best price for hydrochlorothiazide[/url]
JackCounk · August 15, 2022 at 4:47 pm
[url=https://flomax.fun/]flomax pill[/url]
MarkCounk · August 15, 2022 at 4:48 pm
[url=https://drugstore.fun/]online pharmacy no prescription[/url]
JosephMaict · August 15, 2022 at 5:13 pm
[url=http://metformin.bid/]metformin price in india[/url] [url=http://citalopram.fun/]citalopram pills[/url]
AmyCounk · August 15, 2022 at 5:19 pm
[url=https://tadalafil.team/]tadalafil[/url]
Michaelemult · August 15, 2022 at 5:26 pm
[url=http://tizanidine.site/]zanaflex 4mg tablets[/url]
AshCounk · August 15, 2022 at 5:30 pm
[url=https://triamterene.store/]triamterene-hctz 37.5-25 mg[/url] [url=https://retinoa.boutique/]retino cream[/url] [url=https://modafiniltablet.com/]buy provigil online south africa[/url]
WimCounk · August 15, 2022 at 5:57 pm
[url=http://glucophage.cfd/]order metformin 500 mg online[/url]
AmyCounk · August 15, 2022 at 5:59 pm
[url=https://trazodone.site/]trazodone canada brand[/url]
DenCounk · August 15, 2022 at 6:03 pm
[url=http://promethazine.cfd/]buy phenergan 10mg online[/url]
ZakCounk · August 15, 2022 at 6:05 pm
[url=https://zoloft.fun/]zoloft uk[/url] [url=https://trental.cfd/]generic trental 400 mg[/url] [url=https://retina.run/]retin a 0.25 cream[/url] [url=https://tadalafil.team/]tadalafil 5 mg for sale without prescription[/url] [url=https://glucophage.fun/]metformin 500 mg tabs[/url] [url=https://cytotec.cfd/]misoprostol online uk[/url] [url=https://trimox.fun/]amoxicillin 825mg[/url]
MiaCounk · August 15, 2022 at 6:08 pm
[url=http://acyclovir.sbs/]otc zovirax[/url]
PaulCounk · August 15, 2022 at 6:15 pm
[url=https://levofloxacin.fun/]levaquin drug[/url]
Michaelemult · August 15, 2022 at 6:15 pm
[url=http://metformin.bid/]metformin 5000 mg[/url]
EvaCounk · August 15, 2022 at 6:26 pm
[url=http://wellbutrin.life/]bupropion 857[/url]
ElwoodGon · August 15, 2022 at 6:30 pm
[url=https://cleocin.fun/]prescription clindamycin gel[/url]
SueCounk · August 15, 2022 at 6:57 pm
[url=http://tretinoin.fun/]retin a 0.08[/url]
SamCounk · August 15, 2022 at 7:03 pm
[url=http://aurogra.xyz/]aurogra 100 uk[/url] [url=http://toradol.xyz/]toradol for headache[/url] [url=http://femaleviagra.cfd/]purchase viagra online canada[/url] [url=http://retina.run/]buy cheap retin a[/url] [url=http://albendazole.run/]albendazole tablets buy online[/url] [url=http://levofloxacin.fun/]order levaquin online[/url]
KimCounk · August 15, 2022 at 7:08 pm
[url=https://femaleviagra.cfd/]viagra price singapore[/url]
Charlesaduse · August 15, 2022 at 7:09 pm
[url=http://cialisvtab.monster/]tadalafil chewable tablets 20 mg[/url]
RodneyTab · August 15, 2022 at 7:21 pm
[url=http://elimite.cfd/]acticin online[/url]
ElwoodGon · August 15, 2022 at 7:47 pm
[url=https://erectafil.site/]erectafil 40[/url]
AlanCounk · August 15, 2022 at 7:47 pm
[url=https://duloxetine.fun/]cymbalta 30mg cost[/url] [url=https://bactrim.sbs/]backtim antibioticsonline.com[/url]
RicIsose · August 15, 2022 at 7:48 pm
[url=https://lyrica.icu/]lyrica 50 mg price in india[/url] [url=https://provigil.xyz/]provigil online purchase[/url] [url=https://valtrex.click/]order valtrex online usa[/url] [url=https://viagrautab.monster/]viagra online rx[/url] [url=https://sumycin.xyz/]tetracycline online no prescription[/url]
KiaCounk · August 15, 2022 at 7:52 pm
[url=http://tadalafil.moscow/]cheap cialis pills canada[/url]
PaulCounk · August 15, 2022 at 7:57 pm
[url=https://acyclovir.sbs/]acyclovir cream prices[/url]
ElwoodGon · August 15, 2022 at 8:00 pm
[url=https://ciprofloxacin.site/]cipro 250[/url]
Jameseloro · August 15, 2022 at 8:39 pm
[url=http://viagrautab.monster/]sildenafil price comparison uk[/url] [url=http://lyrica.icu/]lyrica 100 mg[/url]
TeoCounk · August 15, 2022 at 8:46 pm
[url=https://cephalexin.fun/]buy keflex online canada[/url]
TeoCounk · August 15, 2022 at 8:46 pm
[url=https://paxil.click/]paroxetine 20 mg tablet[/url]
MaryCounk · August 15, 2022 at 9:08 pm
[url=https://strattera.life/]strattera 400 mg[/url] [url=https://flomax.fun/]flomax 0.4 mg capsule[/url] [url=https://tadalafil.moscow/]cialis drug[/url] [url=https://azithromycin.sbs/]buy azithromycin 500mg online uk[/url] [url=https://levofloxacin.fun/]drug levaquin[/url] [url=https://augmentin.xyz/]augmentin over the counter usa[/url] [url=https://advair.site/]price of generic advair[/url] [url=https://tadacip.site/]generic tadacip[/url]
NickCounk · August 15, 2022 at 9:08 pm
[url=http://trental.cfd/]trental price[/url]
RodneyTab · August 15, 2022 at 9:08 pm
[url=http://albendazole.xyz/]albendazole price in mexico[/url]
Michaelemult · August 15, 2022 at 9:10 pm
[url=http://aurogra.life/]aurogra 100 mg[/url]
AlanCounk · August 15, 2022 at 9:15 pm
[url=https://femaleviagra.cfd/]order sildenafil us[/url] [url=https://kamagra.live/]buy kamagra jelly online[/url] [url=https://cephalexin.works/]keflex sale[/url] [url=https://trazodone.site/]desyrel coupon[/url] [url=https://retina.run/]how to buy retin a online[/url] [url=https://trazodone.loan/]trazodone otc[/url] [url=https://promethazine.cfd/]phenergan tablets otc[/url] [url=https://advair.site/]advair 100[/url]
MiclTek · August 15, 2022 at 9:17 pm
[url=https://lopressor.site/]lopressor over the counter[/url]
JimCounk · August 15, 2022 at 9:19 pm
[url=https://metformin.fun/]cost of brand name metformin[/url]
TedCounk · August 15, 2022 at 9:25 pm
[url=https://bactrim.sbs/]bactrim medicine prices[/url]
Estebanguall · August 15, 2022 at 9:26 pm
[url=http://vardenafil.men/]buy levitra online[/url]
WimCounk · August 15, 2022 at 9:31 pm
[url=http://seroquel.digital/]seroquel 300mg[/url]
LisaCounk · August 15, 2022 at 9:51 pm
[url=https://bactrim.sbs/]septra online[/url]
JosephMaict · August 15, 2022 at 9:53 pm
[url=http://sumycin.xyz/]how much is tetracycline[/url] [url=http://zoloft.click/]zoloft mexico[/url] [url=http://prednisone.date/]prednisone 20mg tablets[/url] [url=http://zestoretic.site/]prinzide zestoretic[/url] [url=http://lyrica.icu/]lyrica 50 mg capsule[/url] [url=http://clopidogrel.xyz/]clopidogrel 75 mg price uk[/url]
EyeCounk · August 15, 2022 at 10:00 pm
[url=http://trazodone.loan/]can you buy trazodone over the counter[/url] [url=http://augmentin.xyz/]amoxicillin 25 mg[/url] [url=http://estrace.xyz/]estrace cheapest price[/url] [url=http://paxil.click/]where can i get paxil[/url] [url=http://cephalexin.fun/]order cephalexin[/url]
RodneyTab · August 15, 2022 at 10:09 pm
[url=http://prednisolone.boutique/]prednisolone gel[/url]
Michaelemult · August 15, 2022 at 10:10 pm
[url=http://prednisolone.run/]prednisolone price[/url]
EvaCounk · August 15, 2022 at 10:11 pm
[url=http://azithromycin.sbs/]zithromax 2 pills[/url]
MichaelDwego · August 15, 2022 at 10:19 pm
[url=https://vardenafil.men/]brand name levitra without prescription[/url]
EyeCounk · August 15, 2022 at 10:29 pm
[url=http://glucophage.fun/]price of metformin 500 mg[/url] [url=http://trental.cfd/]generic trental 400 mg[/url] [url=http://motilium.site/]where to get motilium[/url] [url=http://promethazine.cfd/]phenergan online[/url] [url=http://cephalexin.works/]purchase keflex online[/url] [url=http://prazosin.xyz/]prazosin brand name[/url] [url=http://acyclovir.sbs/]acyclovir 200mg[/url] [url=http://azithromycin.sbs/]zithromax tablets online[/url]
Estebanguall · August 15, 2022 at 11:26 pm
[url=http://lisinopril.beauty/]prinivil generic[/url]
CarlCounk · August 15, 2022 at 11:28 pm
[url=https://effexor.fun/]effexor 325[/url]
WimCounk · August 15, 2022 at 11:29 pm
[url=http://bellatabs.com/]order vardenafil[/url]
KiaCounk · August 15, 2022 at 11:32 pm
[url=http://estrace.xyz/]estrace generic[/url]
JaneCounk · August 15, 2022 at 11:59 pm
[url=http://tadalafil.team/]cialis tadalafil[/url]
MichaelGuabe · August 16, 2022 at 12:00 am
[url=http://elimite.cfd/]elimite cheapest price[/url]
JimCounk · August 16, 2022 at 12:06 am
[url=https://retina.run/]tretinoin 0.06[/url]
JudyCounk · August 16, 2022 at 12:08 am
[url=https://kamagra.live/]kamagra pills nz[/url]
AlanCounk · August 16, 2022 at 12:08 am
[url=https://tadacip.site/]tadacip cost[/url] [url=https://drugstore.fun/]internet pharmacy manitoba[/url] [url=https://strattera.life/]strattera 40 mg pills[/url] [url=https://tadalafil.moscow/]cialis daily cheap[/url]
JaneCounk · August 16, 2022 at 12:13 am
[url=http://zoloft.fun/]zoloft prices 100mg[/url]
WimCounk · August 16, 2022 at 12:14 am
[url=http://advair.works/]advair diskus 250[/url]
AmyCounk · August 16, 2022 at 12:22 am
[url=https://hydrochlorothiazide.site/]rx hydrochlorothiazide[/url]
Estebanguall · August 16, 2022 at 12:22 am
[url=http://ciprofloxacin.site/]cipro 10[/url]
DarrylSef · August 16, 2022 at 12:36 am
[url=https://prednisolone.run/]prednisolone tablets for sale[/url] [url=https://amoxicillin.party/]buy amoxil online[/url] [url=https://amoxicillin.business/]medicine augmentin 625[/url] [url=https://aurogra.life/]aurogra 200[/url] [url=https://cialisptabs.quest/]tadalafil tablets buy[/url] [url=https://advair.fun/]advair cost without insurance[/url]
RodneyTab · August 16, 2022 at 12:37 am
[url=http://prednisolone.boutique/]prednisolone 20mg uk[/url]
Jameseloro · August 16, 2022 at 12:38 am
[url=http://cleocin.fun/]cleocin[/url] [url=http://advair.fun/]advair price in canada[/url] [url=http://cialisvtab.monster/]cialis 500mg[/url] [url=http://propranolol.site/]propranolol la[/url]
RodneyTab · August 16, 2022 at 12:41 am
[url=http://cialisptabs.quest/]cialis soft gel caps[/url]
Estebanguall · August 16, 2022 at 12:42 am
[url=http://baclofen.business/]cheap baclofen[/url]
Charlesaduse · August 16, 2022 at 12:47 am
[url=http://ampicillin.sbs/]ampicillin tablet[/url]
BooCounk · August 16, 2022 at 12:52 am
[url=https://benicar.digital/]cheap benicar online[/url]
ElwoodGon · August 16, 2022 at 12:57 am
[url=https://plavix.site/]prescription drug plavix[/url]
RodneyTab · August 16, 2022 at 12:57 am
[url=http://prednisolone.run/]prednisolone 25mg price[/url]
JaneCounk · August 16, 2022 at 1:03 am
[url=http://prazosin.xyz/]prazosin for bph[/url]
BooCounk · August 16, 2022 at 1:11 am
[url=https://noroxin.monster/]noroxin tablets[/url]
ElwoodGon · August 16, 2022 at 1:18 am
[url=https://tizanidine.site/]zanaflex uk[/url]
RodneyTab · August 16, 2022 at 1:25 am
[url=http://propranolol.site/]where to buy propranolol online[/url]
AmyCounk · August 16, 2022 at 1:29 am
[url=https://trimox.fun/]buy augmentin 875 mg online[/url]
AlanCounk · August 16, 2022 at 1:32 am
[url=https://albendazole.run/]albendazole 200 mg tab[/url] [url=https://hydroxychloroquine.sbs/]where to buy cheap plaquenil[/url] [url=https://amoxil.site/]amoxicillin no script[/url]
JudyCounk · August 16, 2022 at 1:43 am
[url=https://tizanidine.fun/]tizanidine cost india[/url]
JoeCounk · August 16, 2022 at 1:46 am
[url=https://flagyl.fun/]buy flagyl online without prescription[/url] [url=https://levofloxacin.fun/]levaquin antibiotic[/url] [url=https://zoloft.fun/]zoloft pharmacy prices[/url] [url=https://acyclovir.sbs/]acyclovir without a prescription[/url] [url=https://tadalafil.team/]can you buy cialis in canada[/url]
ElwoodGon · August 16, 2022 at 1:51 am
[url=https://erectafil.site/]erectafil[/url]
AlanCounk · August 16, 2022 at 2:05 am
[url=https://trazodone.site/]medication trazodone 100 mg[/url] [url=https://advair.site/]advair for asthma[/url] [url=https://hydroxychloroquine.media/]hydroxychloroquine plaquenil 200 mg tablet[/url]
Charlesaduse · August 16, 2022 at 2:11 am
[url=http://valtrex.click/]valtrex online[/url]
MarvinZem · August 16, 2022 at 2:28 am
[url=https://malegra.site/]malegra cheap[/url]
RicIsose · August 16, 2022 at 2:30 am
[url=https://erectafil.site/]erectafil 20 online[/url] [url=https://celebrex.fun/]celebrex price australia[/url] [url=https://prednisone.date/]20mg daily prednisone[/url] [url=https://sumycin.xyz/]tetracycline 3[/url] [url=https://prednisolone.run/]prednisolone 20mg[/url] [url=https://cialisvtab.monster/]us cialis[/url] [url=https://viagrautab.monster/]cheap viagra prescription[/url] [url=https://nexium.guru/]nexium 20 mg capsule[/url]
AlanCounk · August 16, 2022 at 2:37 am
[url=https://viagradtabs.quest/]generic viagra online usa[/url] [url=https://amoxil.site/]amoxicillin from india[/url] [url=https://paxil.click/]paroxetine 40 mg[/url] [url=https://toradol.xyz/]toradol for fever[/url] [url=https://wellbutrin.life/]wellbutrin price australia[/url] [url=https://tadacip.site/]tadacip 20 india[/url]
RobertFoold · August 16, 2022 at 2:42 am
[url=https://plavix.site/]plavix 75 mg canada[/url]
MaryCounk · August 16, 2022 at 2:43 am
[url=https://tizanidine.fun/]tizanidine 2 mg tablet[/url] [url=https://paxil.click/]discount paxil[/url] [url=https://drugstore.fun/]online pharmacy meds[/url] [url=https://tadacip.site/]buy tadacip 20mg[/url] [url=https://trental.cfd/]trental tablet[/url] [url=https://levofloxacin.fun/]price of levaquin[/url]
JaneCounk · August 16, 2022 at 2:47 am
[url=http://effexor.fun/]effexor 75[/url]
Estebanguall · August 16, 2022 at 2:51 am
[url=http://plavix.site/]medicine plavix 75[/url]
ElwoodGon · August 16, 2022 at 2:54 am
[url=https://provigil.xyz/]order modafinil online india[/url]
Charlesaduse · August 16, 2022 at 2:56 am
[url=http://tizanidine.site/]8mg tizanidine[/url]
Edgarlor · August 16, 2022 at 2:57 am
[url=http://elimite.cfd/]can you buy elimite cream over the counter[/url]
IvyCounk · August 16, 2022 at 2:58 am
[url=http://plavix.cfd/]plavix generic price[/url] [url=http://estrace.xyz/]estrace 2mg[/url] [url=http://strattera.life/]cheapest prices for strattera[/url] [url=http://zoloft.fun/]can i buy zoloft online[/url]
JudyCounk · August 16, 2022 at 3:14 am
[url=https://tadalafil.moscow/]2.5 mg daily tadalafil[/url]
ElwoodGon · August 16, 2022 at 3:15 am
[url=https://albendazole.xyz/]albenza cvs[/url]
MaryCounk · August 16, 2022 at 3:36 am
[url=https://effexor.fun/]effexor pills[/url] [url=https://flagyl.fun/]buy flagyl[/url] [url=https://glucophage.fun/]metformin online no prescription[/url] [url=https://paxil.click/]cheap paroxetine[/url] [url=https://tizanidine.fun/]buy tizanidine 4mg[/url] [url=https://acyclovir.sbs/]acyclovir 5 cream 2g[/url]
AlanCounk · August 16, 2022 at 3:47 am
[url=https://zoloft.fun/]zoloft 50 mg price in india[/url] [url=https://metformin.fun/]metformin 500mg with out presciption[/url] [url=https://strattera.life/]strattera prescription[/url]
RichardFaply · August 16, 2022 at 3:57 am
[url=http://singulair.site/]singulair australia[/url] [url=http://escitalopram.fun/]lexapro[/url] [url=http://prednisolone.run/]prednisolone 5mg tablets price[/url] [url=http://malegra.site/]buy malegra fxt[/url] [url=http://sumycin.xyz/]tetracycline uk[/url] [url=http://tizanidine.site/]zanaflex 6 mg capsules[/url] [url=http://elimite.cfd/]cost of permethrin cream[/url] [url=http://citalopram.fun/]cheap celexa[/url]
DenCounk · August 16, 2022 at 4:07 am
[url=http://wellbutrin.life/]how to get wellbutrin 300 mg without a prescription[/url]
BooCounk · August 16, 2022 at 4:13 am
[url=https://antabuse.boutique/]antabuse for sale[/url]
DenCounk · August 16, 2022 at 4:24 am
[url=http://retina.run/]how to buy retin a[/url]
KiaCounk · August 16, 2022 at 4:32 am
[url=http://glucophage.fun/]metformin otc usa[/url]
JaneCounk · August 16, 2022 at 4:35 am
[url=http://trazodone.loan/]trazodone 377[/url]
JoeCounk · August 16, 2022 at 4:42 am
[url=https://amoxil.site/]augmentin 850 mg[/url] [url=https://prazosin.xyz/]drug prazosin[/url] [url=https://cytotec.cfd/]how to buy misoprostol online[/url] [url=https://hydroxychloroquine.media/]plaquenil 20 mg[/url]
JudyCounk · August 16, 2022 at 4:43 am
[url=https://retina.run/]tretinoin for sale[/url]
Jameseloro · August 16, 2022 at 4:47 am
[url=http://baclofen.business/]lioresal coupon[/url] [url=http://lyrica.icu/]lyrica price in canada[/url] [url=http://amoxicillin.party/]augmentin 625mg brand[/url]
Samuelraisk · August 16, 2022 at 5:01 am
[url=http://metformin.bid/]metformin cost[/url]
AlanCounk · August 16, 2022 at 5:12 am
[url=https://flagyl.fun/]online medicine flagyl[/url] [url=https://augmentin.xyz/]augmentin 500mg price[/url] [url=https://drugstore.fun/]onlinepharmaciescanada com[/url]
DarrylSef · August 16, 2022 at 5:20 am
[url=https://valtrex.click/]valtrex prescription online[/url] [url=https://hydroxychloroquine.stream/]plaquenil weight loss[/url] [url=https://vermox.site/]order vermox online canada[/url]
RodneyTab · August 16, 2022 at 5:24 am
[url=http://malegra.site/]malegra 180 on line[/url]
Curtisvibia · August 16, 2022 at 5:32 am
[url=https://lisinopril.beauty/]zestoretic tabs[/url]
DarrylSef · August 16, 2022 at 5:38 am
[url=https://metformin.bid/]metformin 550 mg[/url] [url=https://tizanidine.site/]buy zanaflex online[/url] [url=https://celebrex.fun/]celebrex 2017[/url] [url=https://cialisptabs.quest/]tadalafil free shipping[/url] [url=https://advair.fun/]advair diskus 50 coupon[/url]
SueCounk · August 16, 2022 at 5:44 am
[url=http://cephalexin.fun/]cephalexin 500 capsule[/url]
MiaCounk · August 16, 2022 at 5:48 am
[url=http://tretinoin.fun/]tretinoin 0.025 gel uk[/url]
SueCounk · August 16, 2022 at 5:56 am
[url=http://toradol.xyz/]toradol 15 mg[/url]
RichardFaply · August 16, 2022 at 6:04 am
[url=http://escitalopram.fun/]generic for cipralex[/url] [url=http://cleocin.fun/]clindamycin gel price[/url] [url=http://nexium.guru/]price of nexium 40 mg in south africa[/url]
IvyCounk · August 16, 2022 at 6:16 am
[url=http://augmentin.xyz/]augmentin price[/url] [url=http://trental.cfd/]how to get trental pill[/url] [url=http://flagyl.fun/]flagyl 750 mg tablets[/url] [url=http://fluconazole.xyz/]diflucan generic[/url] [url=http://tizanidine.fun/]tizanidine 60 mg[/url]
DavisMug · August 16, 2022 at 6:25 am
[url=http://albendazole.xyz/]albenza albendazole[/url]
SueCounk · August 16, 2022 at 6:41 am
[url=http://flomax.fun/]flomax 90 price[/url]
CarlCounk · August 16, 2022 at 6:47 am
[url=https://retina.run/]buy retin a cream online canada[/url]
DavisMug · August 16, 2022 at 6:52 am
[url=http://lisinopril.beauty/]generic for zestril[/url]
IvyCounk · August 16, 2022 at 6:53 am
[url=http://hydroxychloroquine.media/]plaquenil coupon[/url] [url=http://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg tab price[/url] [url=http://glucophage.fun/]metformin otc usa[/url] [url=http://fluconazole.xyz/]diflucan buy in usa[/url] [url=http://effexor.fun/]effexor 100mg[/url] [url=http://cephalexin.works/]cephalexin 300 mg[/url]
CarlCounk · August 16, 2022 at 7:01 am
[url=https://duloxetine.fun/]cymbalta medication[/url]
BooCounk · August 16, 2022 at 7:09 am
[url=https://avodart.guru/]avodart 0 5 mg[/url]
RichardFaply · August 16, 2022 at 7:17 am
[url=http://sumycin.site/]tetracycline price[/url] [url=http://cialisvtab.monster/]price cialis 20 mg[/url] [url=http://provigil.xyz/]modafinil tablet price[/url]
CarlCounk · August 16, 2022 at 7:29 am
[url=https://prazosin.xyz/]prazosin for ptsd[/url]
ElwoodGon · August 16, 2022 at 7:32 am
[url=https://tizanidine.site/]tizanidine 44[/url]
PaulCounk · August 16, 2022 at 7:37 am
[url=https://amoxil.site/]amoxicillin 875 cost[/url]
ZakCounk · August 16, 2022 at 7:45 am
[url=https://cephalexin.works/]keflex 500mg medication[/url] [url=https://femaleviagra.cfd/]where to buy sildenafil[/url]
AshCounk · August 16, 2022 at 7:55 am
[url=https://anafranilclomipramine.quest/]anafranil online canada[/url] [url=https://viagraotabs.monster/]buy sildenafil online australia[/url] [url=https://avodart.email/]buy avodart canada[/url] [url=https://sildalis.cfd/]sildalis 120 mg[/url] [url=https://bbspharm.com/]prednisone 5mg tablets[/url] [url=https://clonidine.email/]clonidine 30 mg[/url] [url=https://motilium.cfd/]motilium 10mg[/url]
Estebanguall · August 16, 2022 at 7:59 am
[url=http://prednisolone.run/]buying prednisolone 5mg online without prescription[/url]
Edgarlor · August 16, 2022 at 8:06 am
[url=http://cleocin.fun/]clindamycin brand[/url]
TeoCounk · August 16, 2022 at 8:09 am
[url=https://tizanidine.fun/]discount zanaflex[/url]
JudyCounk · August 16, 2022 at 8:10 am
[url=https://toradol.xyz/]toradol mexico[/url]
DarrylSef · August 16, 2022 at 8:22 am
[url=https://tetracycline.fun/]terramycin 250 mg price[/url] [url=https://advair.fun/]advair 500 generic[/url]
LisaCounk · August 16, 2022 at 8:23 am
[url=https://toradol.xyz/]toradol cheap[/url]
ElwoodGon · August 16, 2022 at 8:29 am
[url=https://aurogra.life/]aurogra 100 online[/url]
JimCounk · August 16, 2022 at 8:36 am
[url=https://amoxil.site/]buy augmentin cheap[/url]
Estebanguall · August 16, 2022 at 9:13 am
[url=http://advair.fun/]advair diskus online pharmacy[/url]
JaneCounk · August 16, 2022 at 9:14 am
[url=http://promethazine.site/]phenergan medicine online[/url]
Estebanguall · August 16, 2022 at 9:14 am
[url=http://zoloft.click/]uk zoloft[/url]
WilliamWem · August 16, 2022 at 9:22 am
[url=https://ampicillin.sbs/]ampicillin online pharmacy[/url] [url=https://antabuse.fun/]disulfiram price in india[/url] [url=https://cialisvtab.monster/]cialis online buy[/url] [url=https://baclofen.fun/]baclofen 20 mg[/url]
RicIsose · August 16, 2022 at 9:26 am
[url=https://amoxicillin.party/]amoxicillin 825[/url] [url=https://escitalopram.fun/]lexapro 150 mg[/url] [url=https://erectafil.site/]erectafil 20 mg[/url] [url=https://albenza.site/]albendazole brand name price[/url]
AlanCounk · August 16, 2022 at 9:41 am
[url=https://acyclovir.sbs/]acyclovir 800 discount[/url] [url=https://fildena.xyz/]fildena 200mg[/url] [url=https://aurogra.xyz/]aurogra 100 online[/url] [url=https://duloxetine.fun/]cymbalta online no prescription[/url]
TimothyThive · August 16, 2022 at 9:46 am
[url=http://zoloft.click/]order sertraline[/url]
ElwoodGon · August 16, 2022 at 9:55 am
[url=https://clopidogrel.xyz/]cost of plavix 75 mg[/url]
RobertFoold · August 16, 2022 at 10:20 am
[url=https://cialisptabs.quest/]buy tadalafil pills[/url]
TommyHepsy · August 16, 2022 at 10:29 am
[url=https://aurogra.life/]aurogra 100 mg[/url]
UgoCounk · August 16, 2022 at 10:46 am
[url=http://amitriptyline911.com/]amitriptyline 10 mg[/url]
LisaCounk · August 16, 2022 at 10:53 am
[url=https://kamagra.live/]kamagra jelly next day delivery[/url]
SamCounk · August 16, 2022 at 11:11 am
[url=http://hydroxychloroquine.sbs/]plaquenil eye[/url] [url=http://fildena.xyz/]fildena 25[/url] [url=http://estrace.xyz/]estrace discount coupon[/url] [url=http://wellbutrin.life/]buying wellbutrin online[/url] [url=http://hydrochlorothiazide.site/]buying hydrochlorothiazide[/url] [url=http://metformin.fun/]can you buy metformin over the counter uk[/url] [url=http://amoxil.site/]amoxicillin 1g tablet[/url] [url=http://albendazole.run/]albendazole tablets 400 mg[/url]
JoeCounk · August 16, 2022 at 11:21 am
[url=https://paxil.click/]how to get paxil prescription[/url] [url=https://prazosin.xyz/]generic prazosin[/url]
DenCounk · August 16, 2022 at 11:31 am
[url=http://promethazine.site/]phenergan medicine over the counter[/url]
ElwoodGon · August 16, 2022 at 11:41 am
[url=https://sumycin.site/]sumycin without prescription[/url]
WimCounk · August 16, 2022 at 11:49 am
[url=http://propecia.boutique/]propecia without prescription usa[/url]
JimCounk · August 16, 2022 at 12:09 pm
[url=https://flagyl.fun/]where to get flagyl[/url]
ElwoodGon · August 16, 2022 at 12:11 pm
[url=https://zestoretic.site/]zestoretic generic[/url]
IvyCounk · August 16, 2022 at 12:13 pm
[url=http://amoxil.site/]amoxicillin mexico buy[/url] [url=http://acyclovir.sbs/]where can i get acyclovir over the counter[/url] [url=http://flomax.fun/]cost of flomax in canada[/url] [url=http://levofloxacin.fun/]levaquin tablets[/url] [url=http://advair.site/]generic for advair diskus[/url] [url=http://duloxetine.fun/]cymbalta online canada[/url] [url=http://effexor.fun/]effexor xr price[/url] [url=http://drugstore.fun/]canadian pharmacy 24 com[/url]
TommyHepsy · August 16, 2022 at 12:25 pm
[url=https://metformin.bid/]metformin pharmacy[/url]
MichaelDwego · August 16, 2022 at 12:36 pm
[url=https://lisinopril.beauty/]lisinopril 20 mg 12.5 mg[/url]
TeoCounk · August 16, 2022 at 12:37 pm
[url=https://tadalafil.moscow/]tadalafil 5mg price uk[/url]
MaryCounk · August 16, 2022 at 12:39 pm
[url=https://duloxetine.fun/]cymbalta prescription drug[/url] [url=https://tizanidine.fun/]buy cheap tizanidine online[/url] [url=https://hydroxychloroquine.sbs/]plaquenil 200mg tablet cost[/url] [url=https://kamagra.live/]cheap kamagra pills uk[/url] [url=https://effexor.fun/]effexor cost canada[/url]
SueCounk · August 16, 2022 at 12:42 pm
[url=http://retina.run/]cost retin a[/url]
PaulCounk · August 16, 2022 at 1:00 pm
[url=https://fluconazole.xyz/]diflucan online purchase[/url]
Jameseloro · August 16, 2022 at 1:03 pm
[url=http://amoxicillin.business/]buy amoxil online australia[/url] [url=http://metformin.bid/]metformin cost canada[/url] [url=http://anafranil.xyz/]buy anafranil online uk[/url] [url=http://atarax.fun/]atarax 25 mg buy[/url] [url=http://albendazole.xyz/]albenza price[/url] [url=http://prednisone.date/]prednisone 5 mg[/url]
RodneyTab · August 16, 2022 at 1:22 pm
[url=http://metformin.bid/]6000 mg metformin[/url]
Jameseloro · August 16, 2022 at 1:24 pm
[url=http://lopressor.site/]lopressor 50[/url] [url=http://cialisvtab.monster/]cialis best online[/url] [url=http://vermox.site/]vermox 500mg tablet[/url] [url=http://cleocin.fun/]generic clindamycin 400mg[/url]
YonCounk · August 16, 2022 at 1:32 pm
[url=https://tretinoin.fun/]tretinoin cream buy online nz[/url]
SueCounk · August 16, 2022 at 1:33 pm
[url=http://metformin.fun/]glucophage drug[/url]
RichardFaply · August 16, 2022 at 1:44 pm
[url=http://singulair.site/]singulair 10 mg over the counter[/url] [url=http://vardenafil.men/]levitra tablet online india[/url] [url=http://nexium.guru/]coupon otc nexium[/url] [url=http://baclofen.fun/]baclofen discount[/url] [url=http://sumycin.site/]order tetracycline[/url]
BooCounk · August 16, 2022 at 1:49 pm
[url=https://albenza.guru/]albendazole price uk[/url]
YonCounk · August 16, 2022 at 1:55 pm
[url=https://viagradtabs.quest/]best price for sildenafil 20 mg[/url]
EvaCounk · August 16, 2022 at 1:57 pm
[url=http://hydrochlorothiazide.site/]zestoretic 20-25 mg[/url]
TedCounk · August 16, 2022 at 2:05 pm
[url=https://bactrim.sbs/]bactrim forte[/url]
KiaCounk · August 16, 2022 at 2:16 pm
[url=http://viagradtabs.quest/]how much is viagra[/url]
MiclTek · August 16, 2022 at 2:18 pm
[url=https://clopidogrel.xyz/]plavix brand name[/url]
ZakCounk · August 16, 2022 at 2:23 pm
[url=https://effexor.fun/]price of generic effexor[/url] [url=https://retina.run/]average cost of tretinoin[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg price in india[/url] [url=https://duloxetine.fun/]cymbalta 400 mg[/url] [url=https://acyclovir.sbs/]where to buy zovirax cream online[/url] [url=https://advair.site/]advair generic best price[/url] [url=https://trimox.fun/]buy amoxicillin 875[/url] [url=https://wellbutrin.life/]800 mg wellbutrin[/url]
JaneCounk · August 16, 2022 at 2:24 pm
[url=http://trental.cfd/]trental 400mg cost[/url]
TimothyThive · August 16, 2022 at 2:27 pm
[url=http://sumycin.site/]tetracycline 500[/url]
Jameseloro · August 16, 2022 at 2:34 pm
[url=http://buspar.site/]buy generic buspar[/url] [url=http://advair.fun/]advair diskus 250 cheap[/url] [url=http://escitalopram.fun/]generic for lexapro[/url] [url=http://dexamethasone.cfd/]dexamethasone buy online[/url] [url=http://cleocin.fun/]clindamycin price[/url]
IvyCounk · August 16, 2022 at 2:35 pm
[url=http://wellbutrin.life/]wellbutrin 300mg[/url] [url=http://fluconazole.xyz/]diflucan online uk[/url] [url=http://metformin.fun/]metformin 850 mg buy online[/url] [url=http://flagyl.fun/]buy flagyl without prescription[/url] [url=http://tadalafil.moscow/]buy cialis online canadian pharmacy[/url] [url=http://femaleviagra.cfd/]viagra buy india[/url] [url=http://hydroxychloroquine.sbs/]plaquenil brand[/url]
IvyCounk · August 16, 2022 at 2:48 pm
[url=http://amoxil.site/]amoxicillin 500mg price in india[/url] [url=http://fildena.xyz/]fildena 120[/url] [url=http://acyclovir.sbs/]acyclovir 400mg tablets price[/url] [url=http://trimox.fun/]amoxil cost[/url] [url=http://cytotec.cfd/]cytotec 200 mg tab[/url] [url=http://femaleviagra.cfd/]cipla viagra[/url]
Michaeldrist · August 16, 2022 at 2:57 pm
[url=https://malegra.site/]buy malegra 50 mg[/url]
Michaeldrist · August 16, 2022 at 3:03 pm
[url=https://aurogra.life/]buy aurogra 100[/url]
EvaCounk · August 16, 2022 at 3:03 pm
[url=http://trazodone.site/]trazodone 50 mg daily use[/url]
NickCounk · August 16, 2022 at 3:25 pm
[url=http://tadacip.site/]where to buy tadacip 20[/url]
MarkCounk · August 16, 2022 at 3:27 pm
[url=https://chloroquine.boutique/]aralen where to buy[/url]
Samuelraisk · August 16, 2022 at 4:18 pm
[url=http://plavix.site/]plavix 25 mg[/url]
EyeCounk · August 16, 2022 at 4:25 pm
[url=http://albendazole.run/]albendazole 400 mg[/url] [url=http://hydrochlorothiazide.site/]hydrochlorothiazide 200 mg[/url] [url=http://retina.run/]tretinoin uk online[/url] [url=http://aurogra.xyz/]aurogra 100mg tablets[/url] [url=http://hydroxychloroquine.sbs/]hydroxychloroquine sulfate tabs[/url] [url=http://prazosin.xyz/]prazosin hcl for sleep[/url] [url=http://promethazine.cfd/]phenergan rx[/url] [url=http://levofloxacin.fun/]levaquin medication[/url]
AshCounk · August 16, 2022 at 4:33 pm
[url=https://lyrica.monster/]lyrica 50 mg cost[/url] [url=https://seroquel.works/]seroquel erectile dysfunction[/url]
Edgarlor · August 16, 2022 at 4:33 pm
[url=http://clopidogrel.xyz/]clopidogrel price[/url]
RichardFaply · August 16, 2022 at 4:37 pm
[url=http://escitalopram.fun/]lexapro 10 mg pill[/url] [url=http://tizanidine.site/]tizanidine 4 mg tablet[/url] [url=http://malegra.site/]malegra pills[/url] [url=http://singulair.site/]buy cheap singulair[/url] [url=http://prednisolone.boutique/]prednisolone for sale in uk[/url] [url=http://lisinopril.beauty/]lisinopril prescription[/url]
JoeCounk · August 16, 2022 at 4:40 pm
[url=https://fildena.xyz/]fildena 120[/url] [url=https://cytotec.cfd/]cytotec pill for sale[/url] [url=https://azithromycin.sbs/]azithromycin 500 mg daily[/url] [url=https://hydroxychloroquine.media/]plaquenil 200 mg prices[/url] [url=https://paxil.click/]paxil online pharmacy[/url]
WimCounk · August 16, 2022 at 4:56 pm
[url=http://amoxicillin.agency/]amoxil 500mg capsules[/url]
MaryCounk · August 16, 2022 at 5:16 pm
[url=https://wellbutrin.life/]cost for wellbutrin[/url] [url=https://augmentin.xyz/]amoxicillin 500 mg tablets india[/url] [url=https://azithromycin.sbs/]zithromax 500 mg tablet[/url] [url=https://paxil.click/]paxil blood pressure[/url] [url=https://fildena.xyz/]fildena 200mg[/url] [url=https://tizanidine.fun/]tizanidine discount[/url]
AmyCounk · August 16, 2022 at 5:21 pm
[url=https://advair.site/]advair diskus[/url]
EyeCounk · August 16, 2022 at 5:23 pm
[url=http://viagradtabs.quest/]discount viagra uk[/url] [url=http://hydroxychloroquine.sbs/]plaquenil 2 mg[/url] [url=http://tretinoin.fun/]order retin a without a prescription[/url] [url=http://glucophage.fun/]metformin hcl 1000[/url] [url=http://tizanidine.fun/]zanaflex 4 mg tablet[/url] [url=http://cytotec.cfd/]cytotec for induction of labor[/url] [url=http://retina.run/]buy tretinoin online india[/url]
Davidhup · August 16, 2022 at 5:24 pm
[url=https://sumycin.site/]tetracycline without prescriptions[/url]
KimCounk · August 16, 2022 at 5:26 pm
[url=https://promethazine.cfd/]phenergan over the counter[/url]
MaryCounk · August 16, 2022 at 5:30 pm
[url=https://advair.site/]advair 200[/url] [url=https://kamagra.live/]kamagra online australia paypal[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 50mg tab[/url] [url=https://tadacip.site/]tadacip[/url] [url=https://tizanidine.fun/]tizanidine online no prescription[/url] [url=https://effexor.fun/]cheap effexor xr[/url] [url=https://cytotec.cfd/]cytotec for iud insertion[/url] [url=https://plavix.cfd/]clopidogrel 600 mg[/url]
Samuelraisk · August 16, 2022 at 5:44 pm
[url=http://advair.fun/]generic advair 2014[/url]
JoeCounk · August 16, 2022 at 5:45 pm
[url=https://azithromycin.sbs/]where to get azithromycin over the counter[/url] [url=https://trental.cfd/]trental online order[/url]
TeoCounk · August 16, 2022 at 5:48 pm
[url=https://tizanidine.fun/]tizanidine online[/url]
KimCounk · August 16, 2022 at 5:52 pm
[url=https://drugstore.fun/]canadian world pharmacy[/url]
RodneyTab · August 16, 2022 at 5:52 pm
[url=http://zestoretic.site/]zestoretic online[/url]
TeoCounk · August 16, 2022 at 5:57 pm
[url=https://acyclovir.sbs/]can i buy acyclovir over the counter uk[/url]
BooCounk · August 16, 2022 at 6:00 pm
[url=https://azithromycin.guru/]zithromax capsules buy[/url]
Jameseloro · August 16, 2022 at 6:15 pm
[url=http://escitalopram.fun/]lexapro generic brand[/url] [url=http://lyrica.icu/]lyrica 75[/url] [url=http://cialisvtab.monster/]tadalafil generic pills[/url] [url=http://tizanidine.site/]tizanidine online[/url] [url=http://anafranil.xyz/]anafranil price in uk[/url] [url=http://valtrex.click/]buy valtrex over the counter[/url]
MichaelDwego · August 16, 2022 at 6:26 pm
[url=https://zoloft.click/]zoloft online australia[/url]
WilliamWem · August 16, 2022 at 6:27 pm
[url=https://singulair.site/]singulair medicine over the counter[/url] [url=https://cialisvtab.monster/]generic tadalafil price[/url] [url=https://sumycin.site/]tetracycline capsules 250mg[/url] [url=https://nexium.guru/]best price for nexium capsule otc[/url]
WilliamWem · August 16, 2022 at 6:30 pm
[url=https://prednisolone.boutique/]buy prednisolone[/url] [url=https://prednisone.date/]cheapist price for prednisone without prescription[/url] [url=https://zestoretic.site/]zestoretic cost[/url] [url=https://cleocin.fun/]clindamycin brand name in india[/url] [url=https://vardenafil.men/]order vardenafil[/url]
Edgarlor · August 16, 2022 at 6:49 pm
[url=http://sumycin.xyz/]sumycin[/url]
TimothyThive · August 16, 2022 at 7:03 pm
[url=http://plavix.site/]plavix canada price[/url]
Samuelraisk · August 16, 2022 at 7:07 pm
[url=http://dexamethasone.cfd/]dexamethasone 24[/url]
WilliamWem · August 16, 2022 at 7:17 pm
[url=https://strattera.fun/]canadian pharmacy strattera[/url] [url=https://viagrautab.monster/]where can i buy over the counter viagra[/url]
JimCounk · August 16, 2022 at 7:21 pm
[url=https://hydrochlorothiazide.fun/]hydrochlorothiazide discount[/url]
JaneCounk · August 16, 2022 at 7:23 pm
[url=http://hydroxychloroquine.media/]plaquenil cost for generic[/url]
UgoCounk · August 16, 2022 at 7:44 pm
[url=http://robaxin.digital/]medication robaxin 500[/url]
MiclTek · August 16, 2022 at 8:04 pm
[url=https://metformin.bid/]metformin 750 mg price[/url]
AmyCounk · August 16, 2022 at 8:14 pm
[url=https://fluconazole.xyz/]diflucan over the counter singapore[/url]
MiaCounk · August 16, 2022 at 8:20 pm
[url=http://promethazine.site/]phenergan cream australia[/url]
MiaCounk · August 16, 2022 at 8:22 pm
[url=http://femaleviagra.cfd/]sildenafil 60mg[/url]
WilliamWem · August 16, 2022 at 8:30 pm
[url=https://erectafil.site/]erectafil 5[/url] [url=https://tetracycline.fun/]terramycin 250 mg price[/url]
DarrylSef · August 16, 2022 at 8:44 pm
[url=https://baclofen.fun/]baclofen 10 tablet[/url] [url=https://lyrica.icu/]2019 lyrica coupon[/url] [url=https://anafranil.xyz/]anafranil clomipramine[/url] [url=https://cialisptabs.quest/]cialis us pharmacy[/url] [url=https://amoxicillin.business/]amoxicillin 250 mg price in india[/url]
CarlCounk · August 16, 2022 at 8:55 pm
[url=https://tadacip.site/]tadacip online india[/url]
Estebanguall · August 16, 2022 at 9:05 pm
[url=http://vermox.site/]where can i buy vermox[/url]
SueCounk · August 16, 2022 at 9:10 pm
[url=http://drugstore.fun/]legitimate online pharmacy usa[/url]
PaulCounk · August 16, 2022 at 9:19 pm
[url=https://kamagra.live/]kamagra 24[/url]
WimCounk · August 16, 2022 at 9:35 pm
[url=http://retina.works/]retin a .1 cream[/url]
YonCounk · August 16, 2022 at 9:39 pm
[url=https://retina.run/]buy retin a in uk[/url]
JasonCounk · August 16, 2022 at 9:52 pm
[url=http://viagradtabs.quest/]price of viagra 50mg in india[/url]
JackCounk · August 16, 2022 at 10:04 pm
[url=https://effexor.fun/]effexor xr 300 mg[/url]
NickCounk · August 16, 2022 at 10:06 pm
[url=http://fluconazole.xyz/]buy diflucan online canada[/url]
Estebanguall · August 16, 2022 at 10:08 pm
[url=http://vermox.site/]vermox uk[/url]
MichaelGuabe · August 16, 2022 at 10:42 pm
[url=http://hydroxychloroquine.stream/]plaquenil cost[/url]
WilliamWem · August 16, 2022 at 11:08 pm
[url=https://zoloft.business/]buy zoloft without prescription[/url] [url=https://dexamethasone.cfd/]dexamethasone 75 mg[/url] [url=https://lisinopril.beauty/]prinivil brand name[/url] [url=https://antabuse.fun/]antabuse uk[/url] [url=https://cialisvtab.monster/]tadalafil 5mg tablet online canada[/url] [url=https://prednisolone.run/]prednisolone prednisone[/url] [url=https://tizanidine.site/]12mg tizanidine[/url]
JudyCounk · August 16, 2022 at 11:14 pm
[url=https://amoxil.site/]augmentin 1000 mg tablet[/url]
JoeCounk · August 16, 2022 at 11:15 pm
[url=https://promethazine.site/]generic phenergan[/url] [url=https://tizanidine.fun/]zanaflex 4mg[/url]
Estebanguall · August 16, 2022 at 11:21 pm
[url=http://lisinopril.beauty/]lipinpril[/url]
TeoCounk · August 16, 2022 at 11:26 pm
[url=https://wellbutrin.life/]zyban 300 mg[/url]
MiaCounk · August 16, 2022 at 11:27 pm
[url=http://levofloxacin.fun/]levaquin 500[/url]
Jameseloro · August 16, 2022 at 11:28 pm
[url=http://vermox.site/]vermox buy online uk[/url] [url=http://zoloft.business/]zoloft without script visa[/url] [url=http://escitalopram.fun/]lexapro price singapore[/url] [url=http://cialisptabs.quest/]cialis for sale over the counter[/url] [url=http://singulair.site/]singulair oral granules[/url] [url=http://celebrex.fun/]buy celebrex 200mg[/url] [url=http://amoxicillin.party/]augmentin medicine price[/url]
Estebanguall · August 16, 2022 at 11:40 pm
[url=http://clopidogrel.xyz/]medicine clopidogrel 75 mg[/url]
SueCounk · August 16, 2022 at 11:56 pm
[url=http://fildena.xyz/]buy fildena 150 online[/url]
AshCounk · August 17, 2022 at 12:04 am
[url=https://azithromycin2.com/]azithromycin 250mg[/url] [url=https://norxorder.com/]cheap lexapro 20 mg[/url] [url=https://tbpills.com/]fluoxetine 10 mg price[/url] [url=https://colchicine100.com/]colchicine[/url] [url=https://clonidine.cfd/]clonidine buy online[/url] [url=https://buycolchicine.shop/]colchicine 500 mcg tabs[/url] [url=https://medbuyp.com/]nexium cream[/url]
ZakCounk · August 17, 2022 at 12:08 am
[url=https://strattera.life/]buy generic strattera[/url] [url=https://trimox.fun/]amoxicillin 500 mg price[/url] [url=https://femaleviagra.cfd/]sildenafil discount price[/url] [url=https://albendazole.run/]albenza 200 mg tablet price[/url] [url=https://augmentin.xyz/]trimox price[/url] [url=https://tadalafil.team/]prescription cialis uk[/url] [url=https://hydrochlorothiazide.fun/]hctz no prescription[/url] [url=https://paxil.click/]paxil hcl[/url]
YonCounk · August 17, 2022 at 12:20 am
[url=https://tretinoin.fun/]retin a gel over the counter[/url]
AshCounk · August 17, 2022 at 12:24 am
[url=https://olmesartan.quest/]benicar generic substitute[/url] [url=https://cephalexin.boutique/]keflex 500 mg rx[/url] [url=https://clonidine.email/]clonidine australia[/url] [url=https://lipitoratorvastatin.quest/]lipitor 20 mg generic[/url] [url=https://pilldot.com/]ipledge accutane[/url] [url=https://proscar.boutique/]buy propecia singapore[/url] [url=https://buyaccutane.store/]accutane south africa[/url] [url=https://tadacip.guru/]tadacip 20 canada[/url]
AnnaCounk · August 17, 2022 at 12:30 am
[url=http://fluconazole.xyz/]diflucan 1 cream[/url]
ElwoodGon · August 17, 2022 at 12:31 am
[url=https://anafranil.xyz/]anafranil medicine[/url]
WilliamWem · August 17, 2022 at 12:32 am
[url=https://baclofen.fun/]order baclofen online[/url] [url=https://prednisolone.run/]prednisolone 0.5[/url] [url=https://tizanidine.site/]purchase zanaflex online[/url] [url=https://anafranil.xyz/]anafranil 25 mg[/url]
Jameseloro · August 17, 2022 at 12:45 am
[url=http://valtrex.click/]valtrex online prescription[/url] [url=http://vermox.site/]how much is vermox[/url]
IvyCounk · August 17, 2022 at 12:50 am
[url=http://effexor.fun/]effexor online[/url] [url=http://hydrochlorothiazide.fun/]hydrochlorothiazide coupon[/url] [url=http://viagradtabs.quest/]where do you buy viagra[/url] [url=http://toradol.xyz/]toradol generic brand name[/url] [url=http://flomax.fun/]generic for flomax[/url]
JudyCounk · August 17, 2022 at 12:53 am
[url=https://zoloft.fun/]zoloft 200 mg daily[/url]
TedCounk · August 17, 2022 at 12:54 am
[url=https://retina.run/]tretinoin cream 25[/url]
AnnaCounk · August 17, 2022 at 12:59 am
[url=http://trazodone.site/]trazodone 100 mcg[/url]
SueCounk · August 17, 2022 at 1:00 am
[url=http://fildena.xyz/]fildena online pharmacy[/url]
ElwoodGon · August 17, 2022 at 1:04 am
[url=https://amoxicillin.party/]augmentin tablet online[/url]
RicIsose · August 17, 2022 at 1:09 am
[url=https://propranolol.site/]inderal best price[/url] [url=https://nexium.guru/]nexium tablets for sale[/url]
DavisMug · August 17, 2022 at 1:12 am
[url=http://dexamethasone.cfd/]dexamethasone india[/url]
Michaelemult · August 17, 2022 at 1:14 am
[url=http://ciprofloxacin.site/]cipro 750[/url]
SueCounk · August 17, 2022 at 1:33 am
[url=http://advair.site/]advair 50[/url]
JasonCounk · August 17, 2022 at 1:36 am
[url=http://viagradtabs.quest/]viagra india generic[/url]
Estebanguall · August 17, 2022 at 1:40 am
[url=http://celebrex.fun/]discount celebrex online[/url]
DarrylSef · August 17, 2022 at 1:46 am
[url=https://clopidogrel.xyz/]medication plavix[/url] [url=https://zestoretic.site/]prinzide zestoretic[/url] [url=https://zoloft.click/]zoloft sale online[/url] [url=https://valtrex.click/]valtrex 500 mg[/url] [url=https://aurogra.life/]aurogra[/url] [url=https://albenza.site/]albendazole without prescription[/url] [url=https://escitalopram.fun/]how to get lexapro prescription[/url]
WimCounk · August 17, 2022 at 2:01 am
[url=http://hydroxychloroquine.works/]hydroxychloroquine brand[/url]
YonCounk · August 17, 2022 at 2:17 am
[url=https://zoloft.fun/]zoloft 2017[/url]
AnnaCounk · August 17, 2022 at 2:19 am
[url=http://prazosin.xyz/]prazosin 1 mg[/url]
JasonCounk · August 17, 2022 at 2:22 am
[url=http://glucophage.fun/]metformin 2019[/url]
TedCounk · August 17, 2022 at 2:28 am
[url=https://acyclovir.sbs/]buy zovirax online uk[/url]
RicIsose · August 17, 2022 at 2:31 am
[url=https://nexium.guru/]nexium rx coupon[/url] [url=https://zoloft.click/]6250 mg zoloft[/url]
MarkCounk · August 17, 2022 at 2:35 am
[url=https://trazodone.loan/]how much is trazodone 50 mg[/url]
MiaCounk · August 17, 2022 at 2:41 am
[url=http://bactrim.sbs/]generic bactrim for sale[/url]
AnnaCounk · August 17, 2022 at 2:41 am
[url=http://trental.cfd/]trental 400 order online india[/url]
MiaCounk · August 17, 2022 at 2:43 am
[url=http://cytotec.cfd/]misoprostol pharmacy[/url]
MichaelDwego · August 17, 2022 at 2:47 am
[url=https://baclofen.business/]baclofen tablet[/url]
MarkCounk · August 17, 2022 at 2:55 am
[url=https://tadalafil.team/]tadalafil soft gel capsule 20mg[/url]
EvaCounk · August 17, 2022 at 3:00 am
[url=http://bactrim.sbs/]bactrim 80 400 mg tablets[/url]
RodneyTab · August 17, 2022 at 3:07 am
[url=http://anafranil.xyz/]anafranil medicine[/url]
JaneCounk · August 17, 2022 at 3:21 am
[url=http://cephalexin.fun/]keflex 750 mg price[/url]
JosephMaict · August 17, 2022 at 3:32 am
[url=http://cialisptabs.quest/]tadalafil tablets for female in india[/url] [url=http://valtrex.click/]how much is valtrex in canada[/url]
JaneCounk · August 17, 2022 at 3:39 am
[url=http://levofloxacin.fun/]levaquin cost[/url]
PaulCounk · August 17, 2022 at 3:50 am
[url=https://albendazole.run/]buy albendazole[/url]
ElwoodGon · August 17, 2022 at 3:52 am
[url=https://zestoretic.site/]zestoretic 20 12.5[/url]
UgoCounk · August 17, 2022 at 4:03 am
[url=http://anastrozolearimidex.quest/]buy arimidex canada[/url]
MarkCounk · August 17, 2022 at 4:09 am
[url=https://estrace.xyz/]estrace cream medication[/url]
MarvinZem · August 17, 2022 at 4:14 am
[url=https://plavix.site/]online plavix[/url]
Curtisvibia · August 17, 2022 at 4:15 am
[url=https://prednisone.date/]canine prednisone 5mg no prescription[/url]
JoeCounk · August 17, 2022 at 4:16 am
[url=https://tadacip.site/]tadacip 20 mg[/url] [url=https://kamagra.live/]cheap kamagra jelly[/url]
UgoCounk · August 17, 2022 at 4:19 am
[url=http://baclofen.store/]baclofen 0.01[/url]
RobertFoold · August 17, 2022 at 4:24 am
[url=https://anafranil.xyz/]anafranil 25 mg[/url]
IvyCounk · August 17, 2022 at 4:38 am
[url=http://kamagra.live/]kamagra europe[/url] [url=http://metformin.fun/]glucophage in usa[/url] [url=http://tadacip.site/]tadacip 10 mg price[/url] [url=http://fluconazole.xyz/]buy diflucan no prescription[/url] [url=http://tadalafil.team/]buy cialis soft[/url]
JaneCounk · August 17, 2022 at 4:39 am
[url=http://cephalexin.works/]keflex cream cost[/url]
MichaelDwego · August 17, 2022 at 4:42 am
[url=https://plavix.site/]plavix 20 mg price[/url]
Estebanguall · August 17, 2022 at 4:45 am
[url=http://baclofen.business/]can you buy baclofen over the counter uk[/url]
DarrylSef · August 17, 2022 at 4:54 am
[url=https://tizanidine.site/]tizanidine 4 mg[/url] [url=https://zoloft.click/]no petscriptions zoloft[/url] [url=https://baclofen.business/]purchase baclofen[/url] [url=https://plavix.site/]cheap plavix[/url] [url=https://ampicillin.sbs/]ampicillin generic[/url] [url=https://hydroxychloroquine.stream/]plaquenil brand name[/url] [url=https://metformin.bid/]metformin 584[/url]
Charlesaduse · August 17, 2022 at 5:00 am
[url=http://cleocin.fun/]clindamycin cream cost[/url]
MiclTek · August 17, 2022 at 5:02 am
[url=https://zoloft.business/]zoloft medication[/url]
RicIsose · August 17, 2022 at 5:03 am
[url=https://vermox.site/]where can i buy vermox online[/url] [url=https://advair.fun/]advair diskus brand name[/url] [url=https://citalopram.fun/]citalopram 80 mg[/url] [url=https://zestoretic.site/]prinzide zestoretic[/url] [url=https://provigil.xyz/]modafinil 100mg price[/url] [url=https://dexamethasone.cfd/]can i buy dexamethasone over the counter[/url]
IvyCounk · August 17, 2022 at 5:05 am
[url=http://advair.site/]advair 230 21 mcg[/url] [url=http://azithromycin.sbs/]azithromycin 1200 mg[/url] [url=http://cephalexin.works/]buy cephalexin online australia[/url] [url=http://bactrim.sbs/]bactrim 1600 mg[/url] [url=http://estrace.xyz/]coupon estrace[/url] [url=http://cytotec.cfd/]misoprostol cost[/url] [url=http://amoxil.site/]amoxicillin cost[/url]
MiclTek · August 17, 2022 at 5:06 am
[url=https://malegra.site/]generic malegra dxt[/url]
Michaeldrist · August 17, 2022 at 5:11 am
[url=https://buspar.site/]buspar 60mg daily[/url]
UgoCounk · August 17, 2022 at 5:11 am
[url=http://elimitepermethrin.quest/]how much is elimite cream[/url]
DavisMug · August 17, 2022 at 5:13 am
[url=http://celebrex.fun/]price of celebrex[/url]
JasonCounk · August 17, 2022 at 5:13 am
[url=http://effexor.fun/]effexor over the counter[/url]
Edgarlor · August 17, 2022 at 5:14 am
[url=http://cleocin.fun/]clindamycin 300 mg purchase[/url]
DenCounk · August 17, 2022 at 5:40 am
[url=http://prazosin.xyz/]3mg prazosin[/url]
SueCounk · August 17, 2022 at 5:41 am
[url=http://azithromycin.sbs/]azithromycin canada[/url]
RodneyTab · August 17, 2022 at 5:47 am
[url=http://sumycin.xyz/]tetracycline 1000 mg[/url]
Estebanguall · August 17, 2022 at 5:49 am
[url=http://nexium.guru/]nexium tablets australia[/url]
TommyHepsy · August 17, 2022 at 5:53 am
[url=https://celebrex.fun/]can you buy celebrex over the counter[/url]
MiclTek · August 17, 2022 at 5:54 am
[url=https://nexium.guru/]nexium 20 mg rx[/url]
ZakCounk · August 17, 2022 at 6:03 am
[url=https://duloxetine.fun/]cymbalta 20 mg[/url] [url=https://tretinoin.fun/]generic retin a from mexico[/url] [url=https://kamagra.live/]kamagra oral jelly melbourne[/url] [url=https://advair.site/]cheap advair diskus[/url] [url=https://bactrim.sbs/]bactrim 400[/url]
Michaelemult · August 17, 2022 at 6:11 am
[url=http://ampicillin.sbs/]ampicillin cost[/url]
Edgarlor · August 17, 2022 at 6:15 am
[url=http://ampicillin.sbs/]ampicillin medicine[/url]
Edgarlor · August 17, 2022 at 6:17 am
[url=http://dexamethasone.cfd/]4 dexamethasone[/url]
JaneCounk · August 17, 2022 at 6:23 am
[url=http://fluconazole.xyz/]ordering difflucan[/url]
TommyHepsy · August 17, 2022 at 6:36 am
[url=https://anafranil.xyz/]anafranil 25mg capsules[/url]
Michaelemult · August 17, 2022 at 6:36 am
[url=http://amoxicillin.business/]amoxicillin trihydrate[/url]
Michaeldrist · August 17, 2022 at 6:48 am
[url=https://amoxicillin.business/]amoxicillin prices in mexico[/url]
MiclTek · August 17, 2022 at 6:50 am
[url=https://dexamethasone.cfd/]dexamethasone 8 mg tablets[/url]
MichaelGuabe · August 17, 2022 at 6:55 am
[url=http://lopressor.site/]lopressor 20 mg[/url]
Edgarlor · August 17, 2022 at 6:56 am
[url=http://prednisolone.run/]prednisolone price uk[/url]
Samuelraisk · August 17, 2022 at 6:57 am
[url=http://singulair.site/]singulair pills[/url]
MarvinZem · August 17, 2022 at 7:11 am
[url=https://baclofen.business/]baclofen 5 mg tab[/url]
RodneyTab · August 17, 2022 at 7:12 am
[url=http://ampicillin.sbs/]canadian pharmacy ampicillin[/url]
WimCounk · August 17, 2022 at 7:13 am
[url=http://promethazine.shop/]phenergan australia[/url]
TommyHepsy · August 17, 2022 at 7:33 am
[url=https://metformin.bid/]buy metformin er[/url]
MarvinZem · August 17, 2022 at 7:33 am
[url=https://prednisolone.boutique/]prednisolone tablets in india[/url]
ElwoodGon · August 17, 2022 at 7:37 am
[url=https://baclofen.fun/]baclofen 20 mg price in india[/url]
AshCounk · August 17, 2022 at 7:47 am
[url=https://buycipro.guru/]ciprofloxacin 500 tablet price[/url] [url=https://buysuhagra.shop/]suhagra 50 mg buy online india[/url] [url=https://dipyridamole.store/]dipyridamole in india brand name[/url] [url=https://hydroxychloroquine.works/]plaquenil for rheumatoid arthritis[/url] [url=https://retina.works/]buy tretinoin cream india[/url] [url=https://bbspharm.com/]no prescription online prednisone[/url]
MaryCounk · August 17, 2022 at 7:53 am
[url=https://flomax.fun/]purchase flomax online[/url] [url=https://azithromycin.sbs/]buy azithromycin online australia[/url] [url=https://bactrim.sbs/]bactrim 400mg[/url]
Michaelemult · August 17, 2022 at 7:59 am
[url=http://atarax.fun/]3 atarax 25 mg[/url]
JaneCounk · August 17, 2022 at 8:04 am
[url=http://tadacip.site/]cheap tadacip[/url]
ElwoodGon · August 17, 2022 at 8:22 am
[url=https://plavix.site/]clopidogrel 75 mg tabs[/url]
AnnaCounk · August 17, 2022 at 8:29 am
[url=http://hydrochlorothiazide.site/]hydrochlorothiazide 150mg[/url]
KimCounk · August 17, 2022 at 8:30 am
[url=https://paxil.click/]paroxetine pills[/url]
JimCounk · August 17, 2022 at 8:43 am
[url=https://plavix.cfd/]plavix 600[/url]
RobertFoold · August 17, 2022 at 8:50 am
[url=https://prednisolone.boutique/]prednisolone tablets over the counter[/url]
DarrylSef · August 17, 2022 at 9:13 am
[url=https://malegra.site/]malegra dxt uk[/url] [url=https://prednisolone.boutique/]prednisolone 25 mg cost[/url] [url=https://ciprofloxacin.site/]ciprofloxacin price uk[/url] [url=https://albenza.site/]albendazole 400 mg online[/url] [url=https://sumycin.site/]tetracycline 500 mg tablet[/url]
LisaCounk · August 17, 2022 at 9:15 am
[url=https://motilium.site/]buy motilium australia[/url]
AmyCounk · August 17, 2022 at 9:15 am
[url=https://trazodone.site/]cost of trazodone 50 mg tablet[/url]
ElwoodGon · August 17, 2022 at 9:38 am
[url=https://vardenafil.men/]levitra 80 mg[/url]
IvyCounk · August 17, 2022 at 9:53 am
[url=http://tretinoin.fun/]tretinoin 0.1 mexico[/url] [url=http://glucophage.fun/]metformin 3115[/url] [url=http://cephalexin.works/]keflex medication[/url] [url=http://aurogra.xyz/]aurogra[/url] [url=http://fildena.xyz/]fildena[/url] [url=http://retina.run/]can you buy tretinoin over the counter uk[/url] [url=http://trental.cfd/]trental 400 mg tablet price[/url]
RodneyTab · August 17, 2022 at 10:05 am
[url=http://baclofen.fun/]baclofen comparison price[/url]
RicIsose · August 17, 2022 at 10:15 am
[url=https://antabuse.fun/]disulfiram uk[/url] [url=https://atarax.fun/]atarax 25 mg cost[/url] [url=https://zoloft.business/]zoloft generic 50 mg[/url]
BooCounk · August 17, 2022 at 10:16 am
[url=https://proscar911.com/]proscar mexico[/url]
RodneyTab · August 17, 2022 at 10:19 am
[url=http://baclofen.business/]baclofen cream[/url]
JackCounk · August 17, 2022 at 10:27 am
[url=https://cephalexin.works/]cephalexin 500 coupon[/url]
MiclTek · August 17, 2022 at 10:29 am
[url=https://viagrautab.monster/]viagra singapore prescription[/url]
BooCounk · August 17, 2022 at 10:36 am
[url=https://diclofenac.store/]diclofenac tablet price[/url]
NickCounk · August 17, 2022 at 10:42 am
[url=http://augmentin.xyz/]amoxicillin price australia[/url]
RodneyTab · August 17, 2022 at 10:51 am
[url=http://citalopram.fun/]citalopram 80 mg daily[/url]
WilliamWem · August 17, 2022 at 10:56 am
[url=https://metformin.bid/]how to get metformin without a prescription[/url] [url=https://aurogra.life/]aurogra[/url] [url=https://propranolol.site/]innopran xl cost[/url] [url=https://strattera.fun/]strattera 25 mg generic[/url] [url=https://amoxicillin.business/]how much is amoxicillin cost[/url] [url=https://prednisone.date/]buy 10 mg prednisone[/url] [url=https://prednisolone.run/]prednisolone cheapest[/url] [url=https://baclofen.business/]buy baclofen australia[/url]
TeoCounk · August 17, 2022 at 10:57 am
[url=https://promethazine.site/]phenergan without prescription[/url]
EvaCounk · August 17, 2022 at 10:58 am
[url=http://viagradtabs.quest/]viagra capsules in india[/url]
JosephMaict · August 17, 2022 at 11:06 am
[url=http://anafranil.xyz/]buy anafranil online[/url] [url=http://provigil.xyz/]provigil buy europe[/url] [url=http://lyrica.icu/]cheap lyrica[/url] [url=http://ciprofloxacin.site/]ciprofloxacin 250 mg price[/url]
UgoCounk · August 17, 2022 at 11:10 am
[url=http://retinoa.store/]retino 0.25 cream price[/url]
MichaelDwego · August 17, 2022 at 11:14 am
[url=https://anafranil.xyz/]anafranil 100 mg[/url]
ElwoodGon · August 17, 2022 at 11:27 am
[url=https://dexamethasone.cfd/]where can i buy dexamethasone[/url]
TedCounk · August 17, 2022 at 11:31 am
[url=https://trental.cfd/]buy trental 400 mg india[/url]
NickCounk · August 17, 2022 at 11:32 am
[url=http://azithromycin.sbs/]zithromax 250 mg[/url]
Edgarlor · August 17, 2022 at 11:57 am
[url=http://tetracycline.fun/]buy tetracycline online[/url]
DenCounk · August 17, 2022 at 12:02 pm
[url=http://prazosin.xyz/]prazosin 20 mg[/url]
AnnaCounk · August 17, 2022 at 12:03 pm
[url=http://hydrochlorothiazide.fun/]hydrochlorothiazide 5 mg[/url]
ElwoodGon · August 17, 2022 at 12:10 pm
[url=https://ampicillin.sbs/]ampicillin over the counter[/url]
IvyCounk · August 17, 2022 at 12:13 pm
[url=http://tretinoin.fun/]retin a discount[/url] [url=http://cytotec.cfd/]buy misoprostol online no prescription[/url] [url=http://chloroquine.boutique/]chloroquine covid 19[/url] [url=http://tadalafil.moscow/]purchase real cialis online[/url] [url=http://tadalafil.team/]where can i buy cialis pills[/url] [url=http://tadacip.site/]tadacip uk[/url] [url=http://retina.run/]buy tretinoin cream india[/url] [url=http://hydroxychloroquine.sbs/]plaquenil online mexico[/url]
Jameseloro · August 17, 2022 at 12:15 pm
[url=http://lyrica.icu/]lyrica online[/url] [url=http://propranolol.site/]inderal 40[/url] [url=http://singulair.site/]how much is generic singulair[/url] [url=http://sumycin.xyz/]tetracycline 500mg price in usa[/url] [url=http://zoloft.business/]125mg zoloft[/url] [url=http://strattera.fun/]price of generic strattera[/url] [url=http://sumycin.site/]buy tetracycline[/url] [url=http://plavix.site/]plavix 40 mg price[/url]
Edgarlor · August 17, 2022 at 12:25 pm
[url=http://propranolol.site/]120 mg inderal[/url]
TimothyThive · August 17, 2022 at 12:25 pm
[url=http://cialisptabs.quest/]buy tadalafil canada[/url]
MaryCounk · August 17, 2022 at 12:30 pm
[url=https://cephalexin.works/]cephalexin online canada[/url] [url=https://viagradtabs.quest/]buy generic viagra online canada[/url] [url=https://glucophage.fun/]metformin sale online[/url] [url=https://hydroxychloroquine.media/]average cost of plaquenil[/url] [url=https://azithromycin.sbs/]azithromycin 500 price in india[/url] [url=https://estrace.xyz/]estrace 1mg tablet[/url] [url=https://toradol.xyz/]buy toradol tablets[/url]
LisaCounk · August 17, 2022 at 12:36 pm
[url=https://toradol.xyz/]toradol[/url]
JaneCounk · August 17, 2022 at 1:11 pm
[url=http://glucophage.fun/]metformin online australia[/url]
TeoCounk · August 17, 2022 at 1:16 pm
[url=https://plavix.cfd/]clopidogrel 75 mg cost[/url]
JasonCounk · August 17, 2022 at 1:20 pm
[url=http://motilium.site/]motilium tablet[/url]
Curtisvibia · August 17, 2022 at 1:32 pm
[url=https://albenza.site/]albendazole 200 mg[/url]
RobertFoold · August 17, 2022 at 1:38 pm
[url=https://sumycin.site/]tetracycline orders without a prescription[/url]
RodneyTab · August 17, 2022 at 1:38 pm
[url=http://metformin.bid/]online pharmacy metformin[/url]
CarlCounk · August 17, 2022 at 1:59 pm
[url=https://trental.cfd/]trental 400 mg price in india[/url]
RobertFoold · August 17, 2022 at 2:05 pm
[url=https://propranolol.site/]inderal 10 mg price[/url]
JackCounk · August 17, 2022 at 2:19 pm
[url=https://plavix.cfd/]plavix cheapest price[/url]
SamCounk · August 17, 2022 at 2:27 pm
[url=http://acyclovir.sbs/]acyclovir 800 mg coupon[/url] [url=http://trental.cfd/]trental canada[/url] [url=http://bactrim.sbs/]80mg bactrim[/url] [url=http://tadalafil.moscow/]can you buy cialis online in australia[/url]
Jameseloro · August 17, 2022 at 2:30 pm
[url=http://prednisolone.boutique/]cost of prednisolone uk[/url] [url=http://aurogra.life/]aurogra[/url] [url=http://sumycin.site/]tetracycline 3[/url] [url=http://antabuse.fun/]how to get antabuse tablets[/url]
NickCounk · August 17, 2022 at 2:51 pm
[url=http://retina.run/]buy tretinoin 0.1 cream[/url]
IvyCounk · August 17, 2022 at 3:07 pm
[url=http://strattera.life/]strattera online generic[/url] [url=http://retina.run/]buy tretinoin 05 no prescription[/url] [url=http://hydroxychloroquine.sbs/]quineprox 400[/url]
TimothyThive · August 17, 2022 at 3:24 pm
[url=http://cleocin.fun/]clindamycin generic price[/url]
Samuelraisk · August 17, 2022 at 3:40 pm
[url=http://albendazole.xyz/]buy albendazole online[/url]
SueCounk · August 17, 2022 at 3:52 pm
[url=http://cephalexin.works/]where to get cephalexin prescription[/url]
RicIsose · August 17, 2022 at 3:55 pm
[url=https://lopressor.site/]cost of lopressor 50 mg[/url] [url=https://albenza.site/]albendazole 400 mg tab[/url] [url=https://plavix.site/]plavix 300[/url] [url=https://dexamethasone.cfd/]dexamethasone[/url] [url=https://provigil.xyz/]buy modafinil online usa[/url] [url=https://baclofen.business/]can i buy baclofen over the counter[/url] [url=https://elimite.cfd/]cost of permethrin cream[/url] [url=https://cialisptabs.quest/]tadalafil where to buy[/url]
JasonCounk · August 17, 2022 at 3:57 pm
[url=http://hydrochlorothiazide.site/]cheap hydrochlorothiazide[/url]
EyeCounk · August 17, 2022 at 3:58 pm
[url=http://plavix.cfd/]plavix[/url] [url=http://kamagra.live/]buy cheap kamagra jelly[/url] [url=http://hydroxychloroquine.media/]plaquenil 200 mg pill[/url] [url=http://promethazine.site/]phenergan vc[/url]
Michaeldrist · August 17, 2022 at 4:08 pm
[url=https://lisinopril.beauty/]lisinopril price uk[/url]
AnnaCounk · August 17, 2022 at 4:17 pm
[url=http://trimox.fun/]amoxicillin 750[/url]
JasonCounk · August 17, 2022 at 4:21 pm
[url=http://cephalexin.works/]cephalexin cream[/url]
UgoCounk · August 17, 2022 at 4:30 pm
[url=http://suhagrasilagra.com/]silagra india[/url]
JosephMaict · August 17, 2022 at 4:37 pm
[url=http://cialisvtab.monster/]us online pharmacy cialis[/url] [url=http://clopidogrel.xyz/]can i buy plavix over the counter[/url] [url=http://lyrica.icu/]lyrica[/url]
JoeCounk · August 17, 2022 at 4:42 pm
[url=https://prazosin.xyz/]3mg prazosin[/url] [url=https://azithromycin.sbs/]azithromycin 2 tablets[/url] [url=https://acyclovir.sbs/]zovirax cream cost in india[/url] [url=https://strattera.life/]cost of strattera 80 mg[/url] [url=https://glucophage.fun/]glucophage 500 australia[/url]
MiaCounk · August 17, 2022 at 4:49 pm
[url=http://acyclovir.sbs/]zovirax ointment for cold sores[/url]
RodneyTab · August 17, 2022 at 4:55 pm
[url=http://anafranil.xyz/]anafranil pills for sale[/url]
MiaCounk · August 17, 2022 at 5:08 pm
[url=http://tizanidine.fun/]tizanidine 10 mg[/url]
AmyCounk · August 17, 2022 at 5:14 pm
[url=https://advair.site/]advair prices in mexico[/url]
Samuelraisk · August 17, 2022 at 5:16 pm
[url=http://lisinopril.beauty/]lisinopril 2.5 mg tablet[/url]
AshCounk · August 17, 2022 at 5:20 pm
[url=https://amoxicillin.directory/]amoxicillin amoxil[/url] [url=https://acyclovir.agency/]aciclovir tablets[/url] [url=https://celexa.works/]citalopram 20mg coupon[/url]
JaneCounk · August 17, 2022 at 5:21 pm
[url=http://trental.cfd/]trental 400 mg tablet price[/url]
EvaCounk · August 17, 2022 at 5:27 pm
[url=http://amoxil.site/]augmentin price singapore[/url]
Davidhup · August 17, 2022 at 5:33 pm
[url=https://baclofen.business/]baclofen 25 mg tablets[/url]
JackCounk · August 17, 2022 at 5:35 pm
[url=https://retina.run/]retin a .1 cream[/url]
Edgarlor · August 17, 2022 at 5:37 pm
[url=http://amoxicillin.party/]amoxicillin 500 mg purchase without prescription[/url]
MarkCounk · August 17, 2022 at 5:38 pm
[url=https://bactrim.sbs/]bactrim antibiotic how to buy[/url]
JoeCounk · August 17, 2022 at 5:53 pm
[url=https://flagyl.fun/]flagyl pills for sale[/url] [url=https://cephalexin.works/]cephalexin 500mg price in india[/url]
IvyCounk · August 17, 2022 at 5:57 pm
[url=http://chloroquine.boutique/]chloroquine 20[/url] [url=http://metformin.fun/]glucophage pills otc[/url] [url=http://trimox.fun/]buy augmentin online canada[/url]
Michaelemult · August 17, 2022 at 6:09 pm
[url=http://viagrautab.monster/]discount viagra sale[/url]
DarrylSef · August 17, 2022 at 6:13 pm
[url=https://atarax.fun/]atarax eq[/url] [url=https://propranolol.site/]propranolol 80mg[/url] [url=https://provigil.xyz/]where can i purchase modafinil[/url] [url=https://vardenafil.men/]levitra cost uk[/url] [url=https://anafranil.xyz/]anafranil anxiety[/url] [url=https://cialisptabs.quest/]discount cialis pill[/url] [url=https://baclofen.fun/]baclofen 20 mg price in india[/url] [url=https://zoloft.click/]zoloft 25 mg coupon[/url]
TedCounk · August 17, 2022 at 6:33 pm
[url=https://kamagra.live/]kamagra oral jelly for sale india[/url]
RichardFaply · August 17, 2022 at 6:34 pm
[url=http://zoloft.business/]zoloft discount coupon[/url] [url=http://cialisptabs.quest/]tadalafil 5mg daily mexico[/url] [url=http://prednisone.date/]where can i buy corticosteroids pills[/url] [url=http://sumycin.xyz/]sumycin 250 mg[/url] [url=http://prednisolone.boutique/]prednisolone price uk[/url] [url=http://erectafil.site/]erectafil canada[/url] [url=http://albenza.site/]albendazole 200 mg price[/url]
PaulCounk · August 17, 2022 at 6:40 pm
[url=https://levofloxacin.fun/]levaquin antibiotic[/url]
MichaelDwego · August 17, 2022 at 6:44 pm
[url=https://ampicillin.sbs/]purchase ampicillin online[/url]
AlanCounk · August 17, 2022 at 7:05 pm
[url=https://augmentin.xyz/]price of amoxicillin without insurance[/url] [url=https://cytotec.cfd/]buy cytotec online usa[/url] [url=https://hydrochlorothiazide.fun/]buy zestoretic[/url] [url=https://zoloft.fun/]zoloft pill generic[/url]
LisaCounk · August 17, 2022 at 7:06 pm
[url=https://hydroxychloroquine.media/]can you buy plaquenil over the counter[/url]
RichardFaply · August 17, 2022 at 7:13 pm
[url=http://prednisolone.boutique/]prednisolone 5 mg tablet without a prescription[/url] [url=http://provigil.xyz/]buy modafinil 200 mg[/url]
RodneyTab · August 17, 2022 at 7:23 pm
[url=http://albenza.site/]where to buy albendazole[/url]
JimCounk · August 17, 2022 at 7:39 pm
[url=https://cephalexin.fun/]where to puschase cephalexin pils[/url]
JudyCounk · August 17, 2022 at 7:41 pm
[url=https://metformin.fun/]buy cheap metformin online[/url]
AmyCounk · August 17, 2022 at 7:48 pm
[url=https://motilium.site/]motilium pharmacy[/url]
Samuelraisk · August 17, 2022 at 7:57 pm
[url=http://cialisptabs.quest/]order tadalafil canada[/url]
JimCounk · August 17, 2022 at 7:59 pm
[url=https://femaleviagra.cfd/]generic viagra without rx[/url]
KiaCounk · August 17, 2022 at 8:09 pm
[url=http://fluconazole.xyz/]buy fluconazole online[/url]
TeoCounk · August 17, 2022 at 8:19 pm
[url=https://prazosin.xyz/]prazosin for sleep[/url]
AlanCounk · August 17, 2022 at 8:51 pm
[url=https://tadalafil.moscow/]cialis soft tabs online[/url] [url=https://bactrim.sbs/]bactrim 800mg 160mg[/url]
TeoCounk · August 17, 2022 at 8:59 pm
[url=https://cephalexin.fun/]keflex 219[/url]
WilliamWem · August 17, 2022 at 9:07 pm
[url=https://dexamethasone.cfd/]dexona tablet online[/url] [url=https://prednisolone.run/]prednisone prednisolone[/url] [url=https://aurogra.life/]aurogra 100mg tablets[/url] [url=https://antabuse.fun/]order antabuse over the counter[/url] [url=https://albendazole.xyz/]order albenza over the counter[/url] [url=https://vardenafil.men/]cheep levitra for sale[/url] [url=https://prednisolone.boutique/]buy prednisolone 5mg online[/url] [url=https://escitalopram.fun/]buy lexapro canada[/url]
RodneyTab · August 17, 2022 at 9:13 pm
[url=http://erectafil.site/]erectafil 20 mg[/url]
MichaelDwego · August 17, 2022 at 9:14 pm
[url=https://erectafil.site/]buy erectafil 5[/url]
Estebanguall · August 17, 2022 at 9:14 pm
[url=http://cialisptabs.quest/]cialis online prescription uk[/url]
LisaCounk · August 17, 2022 at 9:16 pm
[url=https://flagyl.fun/]where to get flagyl[/url]
LisaCounk · August 17, 2022 at 9:17 pm
[url=https://levofloxacin.fun/]levaquin medication[/url]
IvyCounk · August 17, 2022 at 9:28 pm
[url=http://kamagra.live/]where can i buy kamagra in australia[/url] [url=http://strattera.life/]strattera generic canada[/url]
JosephMaict · August 17, 2022 at 9:58 pm
[url=http://strattera.fun/]atomoxetine cost[/url] [url=http://cleocin.fun/]600 mg clindamycin[/url] [url=http://sumycin.site/]sumycin drug[/url]
IvyCounk · August 17, 2022 at 10:04 pm
[url=http://bactrim.sbs/]buying bactrim[/url] [url=http://levofloxacin.fun/]generic levaquin[/url] [url=http://hydrochlorothiazide.fun/]zestoretic 10 12.5[/url] [url=http://strattera.life/]strattera cap 10mg[/url] [url=http://tretinoin.fun/]buy retin a online no prescription[/url] [url=http://advair.site/]advair diskus cheap[/url]
Curtisvibia · August 17, 2022 at 10:05 pm
[url=https://vardenafil.men/]levitra 20mg[/url]
RobertFoold · August 17, 2022 at 10:08 pm
[url=https://valtrex.click/]buy valtrex 1000 mg[/url]
Estebanguall · August 17, 2022 at 10:21 pm
[url=http://erectafil.site/]erectafil 20[/url]
Michaeldrist · August 17, 2022 at 10:23 pm
[url=https://lopressor.site/]lopressor no prescription[/url]
JosephMaict · August 17, 2022 at 10:40 pm
[url=http://lyrica.icu/]lyrica online canada[/url] [url=http://malegra.site/]malegra 100 from india[/url] [url=http://antabuse.fun/]buy disulfiram online[/url]
EvaCounk · August 17, 2022 at 10:40 pm
[url=http://viagradtabs.quest/]cheapest soft viagra soft on line[/url]
BooCounk · August 17, 2022 at 10:41 pm
[url=https://hydroxychloroquiene.com/]buy plaquenil 0.5[/url]
Michaelemult · August 17, 2022 at 10:45 pm
[url=http://metformin.bid/]metformin 850g[/url]
Edgarlor · August 17, 2022 at 10:52 pm
[url=http://dexamethasone.cfd/]dexamethasone otc[/url]
Edgarlor · August 17, 2022 at 11:07 pm
[url=http://propranolol.site/]propranolol 60 mg[/url]
JasonCounk · August 17, 2022 at 11:22 pm
[url=http://cephalexin.works/]keflex 250 mg tablets[/url]
MarvinZem · August 17, 2022 at 11:29 pm
[url=https://vermox.site/]vermox pharmacy uk[/url]
Edgarlor · August 17, 2022 at 11:48 pm
[url=http://singulair.site/]singulair no prescription[/url]
Estebanguall · August 17, 2022 at 11:48 pm
[url=http://nexium.guru/]how to get nexium cheap[/url]
IvyCounk · August 18, 2022 at 12:05 am
[url=http://duloxetine.fun/]cymbalta generic brand[/url] [url=http://bactrim.sbs/]bactrim 400[/url] [url=http://kamagra.live/]kamagra 100 mg price[/url]
MiclTek · August 18, 2022 at 12:07 am
[url=https://vardenafil.men/]levitra 20mg uk[/url]
YonCounk · August 18, 2022 at 12:20 am
[url=https://amoxil.site/]medication augmentin 875[/url]
Estebanguall · August 18, 2022 at 12:20 am
[url=http://sumycin.site/]buy tetracycline cream[/url]
Samuelraisk · August 18, 2022 at 12:30 am
[url=http://prednisolone.run/]cost of prednisolone uk[/url]
MarvinZem · August 18, 2022 at 12:33 am
[url=https://anafranil.xyz/]where to buy anafranil[/url]
LisaCounk · August 18, 2022 at 12:35 am
[url=https://kamagra.live/]kamagra oral jelly in bangkok[/url]
LisaCounk · August 18, 2022 at 12:38 am
[url=https://cephalexin.fun/]cephalexin buy[/url]
AlanCounk · August 18, 2022 at 12:55 am
[url=https://fluconazole.xyz/]can you order diflucan online[/url] [url=https://glucophage.fun/]cheap metformin uk[/url]
SueCounk · August 18, 2022 at 12:58 am
[url=http://viagradtabs.quest/]price for viagra[/url]
JackCounk · August 18, 2022 at 1:04 am
[url=https://trazodone.loan/]medicine trazodone[/url]
NickCounk · August 18, 2022 at 1:04 am
[url=http://augmentin.xyz/]augmentin 875 mg price in india[/url]
AshCounk · August 18, 2022 at 1:08 am
[url=https://metronidazoleflagyl.monster/]flagyl 375 mg capsules[/url] [url=https://antibioticsoverthecounter.com/]biaxin cost[/url] [url=https://furosemide.digital/]furosemide tablets for sale[/url]
LisaCounk · August 18, 2022 at 1:10 am
[url=https://glucophage.fun/]584 metformin[/url]
MichaelGuabe · August 18, 2022 at 1:11 am
[url=http://celebrex.fun/]celebrex 200 mg capsule cost[/url]
SueCounk · August 18, 2022 at 1:13 am
[url=http://toradol.xyz/]toradol for fever[/url]
SueCounk · August 18, 2022 at 1:48 am
[url=http://tadalafil.team/]tadalafil 20mg online canada[/url]
BooCounk · August 18, 2022 at 1:50 am
[url=https://clopidogrelplavix.quest/]clopidogrel 75 mg discount coupon[/url]
ElwoodGon · August 18, 2022 at 1:54 am
[url=https://singulair.site/]singulair coupon online[/url]
Jameseloro · August 18, 2022 at 2:03 am
[url=http://amoxicillin.party/]amoxicillin 625mg[/url] [url=http://aurogra.life/]aurogra[/url] [url=http://cialisptabs.quest/]cheap cialis pills canada[/url] [url=http://provigil.xyz/]how to buy modafinil online[/url]
Davidhup · August 18, 2022 at 2:06 am
[url=https://lopressor.site/]price of lopressor[/url]
JosephMaict · August 18, 2022 at 2:13 am
[url=http://dexamethasone.cfd/]6 mg dexamethasone[/url] [url=http://plavix.site/]plavix otc[/url] [url=http://zestoretic.site/]buy zestoretic[/url]
PaulCounk · August 18, 2022 at 2:36 am
[url=https://zoloft.fun/]zoloft 2017[/url]
MarkCounk · August 18, 2022 at 2:37 am
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide buy online[/url]
UgoCounk · August 18, 2022 at 2:40 am
[url=http://vermox.email/]where can i get vermox[/url]
JoeCounk · August 18, 2022 at 2:42 am
[url=https://duloxetine.fun/]cymbalta generic online[/url] [url=https://kamagra.live/]kamagra jelly or tablets[/url] [url=https://bactrim.sbs/]bactrim sulfamethoxazole[/url] [url=https://cytotec.cfd/]cytotec prescription[/url] [url=https://chloroquine.boutique/]chloroquine 300[/url] [url=https://trazodone.loan/]trazodone no rx[/url] [url=https://estrace.xyz/]estrace cream weight gain[/url] [url=https://glucophage.fun/]buy metformin online pharmacy[/url]
JaneCounk · August 18, 2022 at 2:46 am
[url=http://promethazine.cfd/]phenergan tablets online uk[/url]
IvyCounk · August 18, 2022 at 3:09 am
[url=http://tadalafil.team/]canadian pharmacy tadalafil[/url] [url=http://cephalexin.fun/]cephalexin 500mg buy[/url]
Estebanguall · August 18, 2022 at 3:22 am
[url=http://cialisvtab.monster/]can you buy generic cialis[/url]
Davidhup · August 18, 2022 at 3:26 am
[url=https://cialisptabs.quest/]buy cialis soft tabs[/url]
ElwoodGon · August 18, 2022 at 3:45 am
[url=https://prednisolone.boutique/]prednisolone tablets over the counter[/url]
ElwoodGon · August 18, 2022 at 3:51 am
[url=https://zoloft.business/]zoloft 300 mg[/url]
JimCounk · August 18, 2022 at 3:53 am
[url=https://retina.run/]retin a cost canada[/url]
DarrylSef · August 18, 2022 at 3:56 am
[url=https://ampicillin.sbs/]ampicillin 5g[/url] [url=https://metformin.bid/]can you buy metformin over the counter[/url] [url=https://vermox.site/]price of vermox south africa[/url]
MarvinZem · August 18, 2022 at 4:03 am
[url=https://celebrex.fun/]buy celebrex online uk[/url]
RobertFoold · August 18, 2022 at 4:16 am
[url=https://atarax.fun/]where to buy atarax[/url]
WimCounk · August 18, 2022 at 4:30 am
[url=http://budesonide.store/]cheap budesonide[/url]
Michaelemult · August 18, 2022 at 4:34 am
[url=http://lyrica.icu/]buy generic lyrica online[/url]
Michaeldrist · August 18, 2022 at 4:50 am
[url=https://buspar.site/]buspar prescription cost[/url]
MaryCounk · August 18, 2022 at 5:02 am
[url=https://motilium.site/]motilium pharmacy[/url] [url=https://fluconazole.xyz/]diflucan cream prescription[/url] [url=https://trimox.fun/]can i buy amoxil[/url] [url=https://fildena.xyz/]fildena 50 online[/url] [url=https://chloroquine.boutique/]aralen phosphate[/url] [url=https://promethazine.site/]phenergan vc[/url]
KimCounk · August 18, 2022 at 5:07 am
[url=https://trimox.fun/]generic augmentin 875[/url]
MaryCounk · August 18, 2022 at 5:15 am
[url=https://drugstore.fun/]international pharmacy no prescription[/url] [url=https://tadacip.site/]tadacip 20 price in india[/url] [url=https://viagradtabs.quest/]buy sildenafil generic india[/url] [url=https://retina.run/]how much is tretinoin in uk[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg over the counter[/url] [url=https://bactrim.sbs/]bactrim 800 mg 160 mg[/url] [url=https://toradol.xyz/]where can i buy toradol[/url] [url=https://prazosin.xyz/]prazosin cats[/url]
IvyCounk · August 18, 2022 at 5:20 am
[url=http://promethazine.site/]buy phenergan 25mg online[/url] [url=http://effexor.fun/]price of generic effexor[/url] [url=http://metformin.fun/]buy metformin[/url] [url=http://tadacip.site/]tadacip prices in india[/url] [url=http://fildena.xyz/]fildena 150 online[/url]
Samuelraisk · August 18, 2022 at 5:22 am
[url=http://propranolol.site/]propranolol order online[/url]
MichaelDwego · August 18, 2022 at 5:29 am
[url=https://baclofen.fun/]baclofen cream australia[/url]
MichaelGuabe · August 18, 2022 at 5:31 am
[url=http://cleocin.fun/]clindamycin cream otc[/url]
Curtisvibia · August 18, 2022 at 5:37 am
[url=https://erectafil.site/]erectafil 40 mg[/url]
ZakCounk · August 18, 2022 at 5:47 am
[url=https://hydroxychloroquine.sbs/]quineprox 75mg[/url] [url=https://metformin.fun/]metformin singapore[/url] [url=https://tadacip.site/]buy tadacip with paypal[/url]
Michaelemult · August 18, 2022 at 5:48 am
[url=http://ciprofloxacin.site/]where to buy cipro online[/url]
RichardFaply · August 18, 2022 at 6:16 am
[url=http://zoloft.click/]zoloft mexico[/url] [url=http://sumycin.site/]tetracycline tablet[/url] [url=http://cleocin.fun/]clindamycin generic cost[/url] [url=http://singulair.site/]singulair prescription uk[/url]
DavisMug · August 18, 2022 at 6:20 am
[url=http://baclofen.business/]baclofen tabs[/url]
Michaeldrist · August 18, 2022 at 6:26 am
[url=https://cialisvtab.monster/]cialis generic 10 mg[/url]
Edgarlor · August 18, 2022 at 6:29 am
[url=http://advair.fun/]advair pill[/url]
Estebanguall · August 18, 2022 at 6:33 am
[url=http://sumycin.xyz/]where can i buy tetracycline over the counter[/url]
Michaelemult · August 18, 2022 at 6:36 am
[url=http://clopidogrel.xyz/]plavix 25 mg[/url]
LisaCounk · August 18, 2022 at 6:38 am
[url=https://trazodone.site/]trazodone 150 mg price[/url]
NickCounk · August 18, 2022 at 6:43 am
[url=http://tadalafil.team/]daily use cialis cost[/url]
JosephMaict · August 18, 2022 at 7:00 am
[url=http://zoloft.click/]zoloft 200 mg tablet[/url] [url=http://anafranil.xyz/]anafranil for dogs[/url] [url=http://baclofen.fun/]baclofen lioresal[/url] [url=http://clopidogrel.xyz/]clopidogrel price uk[/url] [url=http://propranolol.site/]propranolol pill 30 mg[/url] [url=http://citalopram.fun/]citalopram capsules[/url]
SamCounk · August 18, 2022 at 7:07 am
[url=http://tadalafil.moscow/]cialis generic pharmacy[/url] [url=http://promethazine.cfd/]canadian pharmacy phenergan[/url] [url=http://acyclovir.sbs/]buy acyclovir usa[/url] [url=http://hydrochlorothiazide.site/]hydrochlorothiazide cost[/url] [url=http://trazodone.site/]trazodone without prescription[/url] [url=http://zoloft.fun/]zoloft 37.5 mg daily[/url] [url=http://cephalexin.works/]how to buy cephalexin[/url]
Davidhup · August 18, 2022 at 7:13 am
[url=https://viagrautab.monster/]cheap viagra online india[/url]
BooCounk · August 18, 2022 at 7:27 am
[url=https://ondansetronzofran.quest/]where can i buy zofran online[/url]
TeoCounk · August 18, 2022 at 7:30 am
[url=https://motilium.site/]motilium pharmacy[/url]
UgoCounk · August 18, 2022 at 7:36 am
[url=http://suhagra.cfd/]buy suhagra 25 mg[/url]
JasonCounk · August 18, 2022 at 7:36 am
[url=http://advair.site/]advair price in canada[/url]
Estebanguall · August 18, 2022 at 7:39 am
[url=http://celebrex.fun/]celebrex price mexico[/url]
Estebanguall · August 18, 2022 at 7:41 am
[url=http://erectafil.site/]erectafil 20 for sale[/url]
AmyCounk · August 18, 2022 at 7:51 am
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide online canada[/url]
Charlesaduse · August 18, 2022 at 7:58 am
[url=http://antabuse.fun/]buy antabuse online no prescription[/url]
RodneyTab · August 18, 2022 at 7:59 am
[url=http://prednisolone.run/]prednisolone brand name india[/url]
MiclTek · August 18, 2022 at 8:23 am
[url=https://prednisone.date/]prednisone rx coupon[/url]
ElwoodGon · August 18, 2022 at 8:33 am
[url=https://dexamethasone.cfd/]dexamethasone 2 mg pill[/url]
TommyHepsy · August 18, 2022 at 8:48 am
[url=https://lyrica.icu/]buy lyrica online australia[/url]
MichaelDwego · August 18, 2022 at 8:54 am
[url=https://buspar.site/]cost of buspar[/url]
JaneCounk · August 18, 2022 at 9:00 am
[url=http://viagradtabs.quest/]price for sildenafil 100 mg[/url]
KiaCounk · August 18, 2022 at 9:01 am
[url=http://toradol.xyz/]where to buy toradol[/url]
IvyCounk · August 18, 2022 at 9:06 am
[url=http://kamagra.live/]kamagra 50 mg gel oral[/url] [url=http://cytotec.cfd/]cytotec medication[/url] [url=http://tadalafil.moscow/]cialis tablets 20mg for sale[/url]
Davidhup · August 18, 2022 at 9:07 am
[url=https://prednisolone.boutique/]prednisolone tablets for sale uk[/url]
KimCounk · August 18, 2022 at 9:14 am
[url=https://prazosin.xyz/]prazosin cats[/url]
MichaelDwego · August 18, 2022 at 9:18 am
[url=https://metformin.bid/]order metformin medicine[/url]
SueCounk · August 18, 2022 at 9:29 am
[url=http://trazodone.loan/]prescription prices for trazodone[/url]
Samuelraisk · August 18, 2022 at 9:41 am
[url=http://lyrica.icu/]lyrica 75 mg price south africa[/url]
Michaelemult · August 18, 2022 at 9:58 am
[url=http://advair.fun/]advair no prescription[/url]
TimothyThive · August 18, 2022 at 10:04 am
[url=http://sumycin.site/]tetracycline 500[/url]
EvaCounk · August 18, 2022 at 10:09 am
[url=http://hydroxychloroquine.media/]hydroxychloroquine brand name[/url]
DarrylSef · August 18, 2022 at 10:10 am
[url=https://strattera.fun/]240 mg strattera[/url] [url=https://metformin.bid/]metformin 1000[/url]
SueCounk · August 18, 2022 at 10:26 am
[url=http://trazodone.loan/]how much is trazodone 100 mg[/url]
DavisMug · August 18, 2022 at 10:27 am
[url=http://metformin.bid/]order metformin 1000 mg[/url]
AlanCounk · August 18, 2022 at 10:32 am
[url=https://kamagra.live/]kamagra oral jelly price in kenya[/url] [url=https://effexor.fun/]effexor pill[/url] [url=https://motilium.site/]order motilium online[/url] [url=https://hydroxychloroquine.sbs/]hydroxychloroquine 700[/url] [url=https://hydroxychloroquine.media/]plaquenil singapore[/url] [url=https://retina.run/]buy retin a cheap[/url] [url=https://trazodone.loan/]trazodone discount coupon[/url] [url=https://bactrim.sbs/]bactrim generic brand[/url]
SueCounk · August 18, 2022 at 10:41 am
[url=http://trimox.fun/]generic amoxicillin over the counter[/url]
ZakCounk · August 18, 2022 at 10:44 am
[url=https://promethazine.site/]phenergan otc usa[/url] [url=https://duloxetine.fun/]cymbalta 30 mg coupon[/url] [url=https://hydrochlorothiazide.fun/]buy hydrochlorothiazide online[/url] [url=https://albendazole.run/]buy albendazole tablets[/url]
Edgarlor · August 18, 2022 at 11:19 am
[url=http://zestoretic.site/]zestoretic generic[/url]
UgoCounk · August 18, 2022 at 11:26 am
[url=http://ondansetronzofran.quest/]zofran pill over the counter[/url]
RobertFoold · August 18, 2022 at 11:29 am
[url=https://hydroxychloroquine.stream/]plaquenil 400 mg daily cost[/url]
JackCounk · August 18, 2022 at 11:43 am
[url=https://levofloxacin.fun/]levaquin 500 mg tablets[/url]
AlanCounk · August 18, 2022 at 11:53 am
[url=https://trental.cfd/]trental coupon[/url] [url=https://wellbutrin.life/]300 wellbutrin[/url] [url=https://hydroxychloroquine.media/]hydroxychloroquine sulfate 200mg tablet[/url] [url=https://tadacip.site/]tadacip 5mg[/url]
NickCounk · August 18, 2022 at 11:54 am
[url=http://hydroxychloroquine.media/]plaquenil[/url]
KimCounk · August 18, 2022 at 11:56 am
[url=https://flomax.fun/]flomax for bph[/url]
JosephMaict · August 18, 2022 at 12:03 pm
[url=http://strattera.fun/]strattera 10 mg coupon[/url] [url=http://buspar.site/]buspirone price[/url] [url=http://escitalopram.fun/]lexapro prices[/url] [url=http://plavix.site/]plavix 75 mg price[/url] [url=http://aurogra.life/]aurogra 100 uk[/url]
Curtisvibia · August 18, 2022 at 12:15 pm
[url=https://lyrica.icu/]lyrica 2017[/url]
KiaCounk · August 18, 2022 at 12:15 pm
[url=http://glucophage.fun/]metformin order canada[/url]
CarlCounk · August 18, 2022 at 12:20 pm
[url=https://acyclovir.sbs/]zovirax mexico[/url]
MiaCounk · August 18, 2022 at 12:27 pm
[url=http://promethazine.cfd/]online phenergan[/url]
DavisMug · August 18, 2022 at 12:39 pm
[url=http://tetracycline.fun/]terramycin drug[/url]
MiclTek · August 18, 2022 at 12:48 pm
[url=https://advair.fun/]advair generic price[/url]
Curtisvibia · August 18, 2022 at 1:02 pm
[url=https://sumycin.xyz/]sumycin over the counter[/url]
YonCounk · August 18, 2022 at 1:02 pm
[url=https://fluconazole.xyz/]discount diflucan[/url]
IvyCounk · August 18, 2022 at 1:02 pm
[url=http://hydrochlorothiazide.site/]hydrochlorothiazide 50 mg daily[/url] [url=http://tadalafil.moscow/]online cialis paypal[/url]
MiclTek · August 18, 2022 at 1:07 pm
[url=https://prednisolone.run/]5mg prednisolone daily[/url]
SueCounk · August 18, 2022 at 1:08 pm
[url=http://cephalexin.works/]keflex antibiotics[/url]
Michaeldrist · August 18, 2022 at 1:11 pm
[url=https://nexium.guru/]how much is nexium prescription[/url]
YonCounk · August 18, 2022 at 1:24 pm
[url=https://metformin.fun/]glucophage price south africa[/url]
IvyCounk · August 18, 2022 at 1:29 pm
[url=http://cephalexin.fun/]keflex for sale online[/url] [url=http://paxil.click/]paroxetine 10mg[/url] [url=http://hydrochlorothiazide.fun/]can i buy hydrochlorothiazide over the counter[/url] [url=http://amoxil.site/]buy augmentin tab online no prescription[/url] [url=http://duloxetine.fun/]cymbalta price canada[/url] [url=http://albendazole.run/]albendazole brand name[/url] [url=http://flomax.fun/]flomax uk[/url] [url=http://plavix.cfd/]plavix without prescription[/url]
JasonCounk · August 18, 2022 at 1:35 pm
[url=http://acyclovir.sbs/]zovirax pills over the counter[/url]
MiaCounk · August 18, 2022 at 1:36 pm
[url=http://cephalexin.works/]cephalexin 250[/url]
ElwoodGon · August 18, 2022 at 1:41 pm
[url=https://albendazole.xyz/]albendazole 400 mg buy online from india[/url]
ZakCounk · August 18, 2022 at 1:41 pm
[url=https://hydroxychloroquine.media/]plaquenil 200mg price[/url] [url=https://flomax.fun/]flomax 2mg[/url] [url=https://zoloft.fun/]zoloft 37.5 mg daily[/url] [url=https://duloxetine.fun/]buy cymbalta online cheap[/url] [url=https://acyclovir.sbs/]valacyclovir[/url] [url=https://tadalafil.team/]cialis generic online uk[/url] [url=https://fildena.xyz/]fildena buy online[/url] [url=https://metformin.fun/]metformin 1000 mg pill[/url]
KiaCounk · August 18, 2022 at 1:47 pm
[url=http://effexor.fun/]effexor cost uk[/url]
Samuelraisk · August 18, 2022 at 1:58 pm
[url=http://lopressor.site/]lopressor 25 tablet[/url]
BooCounk · August 18, 2022 at 2:04 pm
[url=https://allopurinol.guru/]allopurinol buy[/url]
JaneCounk · August 18, 2022 at 2:07 pm
[url=http://tretinoin.fun/]1 retin a gel[/url]
AshCounk · August 18, 2022 at 2:08 pm
[url=https://accutane.agency/]buy accutane[/url] [url=https://tizanidine.digital/]zanaflex tab 4mg[/url] [url=https://retinoa.shop/]retino 05[/url] [url=https://azithromycin.works/]where can i purchase azithromycin[/url]
ElwoodGon · August 18, 2022 at 2:14 pm
[url=https://anafranil.xyz/]anafranil weight loss[/url]
RobertFoold · August 18, 2022 at 2:15 pm
[url=https://propranolol.site/]inderal tab[/url]
Michaeldrist · August 18, 2022 at 2:36 pm
[url=https://zoloft.click/]brand name zoloft coupon[/url]
KiaCounk · August 18, 2022 at 2:38 pm
[url=http://advair.site/]generic advair diskus[/url]
Samuelraisk · August 18, 2022 at 2:53 pm
[url=http://singulair.site/]singulair 5mg[/url]
MiclTek · August 18, 2022 at 2:56 pm
[url=https://prednisone.date/]prednisone 10 tablet[/url]
RobertFoold · August 18, 2022 at 2:58 pm
[url=https://buspar.site/]buspar brand name[/url]
EvaCounk · August 18, 2022 at 3:00 pm
[url=http://retina.run/]retin a buy online australia[/url]
EvaCounk · August 18, 2022 at 3:10 pm
[url=http://bactrim.sbs/]80 mg bactrim[/url]
ElwoodGon · August 18, 2022 at 3:12 pm
[url=https://albendazole.xyz/]rx albendazole[/url]
MiaCounk · August 18, 2022 at 3:16 pm
[url=http://toradol.xyz/]buy toradol online canada[/url]
JosephMaict · August 18, 2022 at 3:22 pm
[url=http://sumycin.site/]tetracycline online no prescription[/url] [url=http://cialisvtab.monster/]cialis 100mg[/url] [url=http://cialisptabs.quest/]best price generic tadalafil[/url] [url=http://nexium.guru/]nexium lowest price[/url] [url=http://singulair.site/]how much is singulair[/url]
JosephMaict · August 18, 2022 at 3:35 pm
[url=http://zoloft.click/]zoloft generic[/url] [url=http://valtrex.click/]valtrex discount[/url]
Samuelraisk · August 18, 2022 at 3:44 pm
[url=http://cialisvtab.monster/]cialis order usa[/url]
JasonCounk · August 18, 2022 at 3:46 pm
[url=http://drugstore.fun/]rate canadian pharmacies[/url]
MiaCounk · August 18, 2022 at 4:10 pm
[url=http://trimox.fun/]amoxicillin 500mg capsule price[/url]
CarlCounk · August 18, 2022 at 4:16 pm
[url=https://albendazole.run/]albendazole drug[/url]
RobertFoold · August 18, 2022 at 4:47 pm
[url=https://amoxicillin.business/]amoxicillin 875 mg cost[/url]
LisaCounk · August 18, 2022 at 4:49 pm
[url=https://advair.site/]purchase advair from canada[/url]
ElwoodGon · August 18, 2022 at 5:01 pm
[url=https://citalopram.fun/]citalopram 20 mg tablet[/url]
Edgarlor · August 18, 2022 at 5:03 pm
[url=http://prednisolone.boutique/]prednisolone 20 mg brand name[/url]
MiclTek · August 18, 2022 at 5:08 pm
[url=https://baclofen.business/]lioresal generic[/url]
UgoCounk · August 18, 2022 at 5:22 pm
[url=http://robaxin1.com/]robaxin[/url]
UgoCounk · August 18, 2022 at 5:22 pm
[url=http://fildenatabs.online/]fildena 120[/url]
MarvinZem · August 18, 2022 at 5:24 pm
[url=https://amoxicillin.party/]cost of amoxicillin[/url]
Michaelemult · August 18, 2022 at 5:31 pm
[url=http://singulair.site/]buy singulair online[/url]
Davidhup · August 18, 2022 at 5:36 pm
[url=https://amoxicillin.party/]augmentin 875 mg tablets[/url]
RodneyTab · August 18, 2022 at 5:39 pm
[url=http://lisinopril.beauty/]lisinopril 20 mg over the counter[/url]
ElwoodGon · August 18, 2022 at 5:47 pm
[url=https://cialisptabs.quest/]buy generic tadalafil online cheap[/url]
MichaelGuabe · August 18, 2022 at 5:50 pm
[url=http://atarax.fun/]atarax prescription uk[/url]
YonCounk · August 18, 2022 at 5:56 pm
[url=https://azithromycin.sbs/]azithromycin 500mg online[/url]
BooCounk · August 18, 2022 at 6:08 pm
[url=https://suhagra.email/]suhagra 100 online[/url]
DarrylSef · August 18, 2022 at 6:09 pm
[url=https://hydroxychloroquine.stream/]plaquenil hives[/url] [url=https://plavix.site/]plavix 75 mg tablet price in india[/url] [url=https://vardenafil.men/]order levitra from canada[/url] [url=https://elimite.cfd/]elimite cost[/url] [url=https://propranolol.site/]propranolol 50 mg[/url] [url=https://zestoretic.site/]zestoretic 20-25 mg[/url]
RichardFaply · August 18, 2022 at 6:13 pm
[url=http://zoloft.business/]zoloft tablets 50mg price[/url] [url=http://prednisolone.run/]prednisolone 25mg tablets[/url] [url=http://clopidogrel.xyz/]plavix rx[/url] [url=http://propranolol.site/]buy inderal online without prescription[/url] [url=http://ampicillin.sbs/]ampicillin 500 mg capsule[/url] [url=http://hydroxychloroquine.stream/]plaquenil hydroxychloroquine cost[/url] [url=http://dexamethasone.cfd/]dexamethasone 0.5 tablet[/url]
WilliamWem · August 18, 2022 at 6:15 pm
[url=https://lopressor.site/]lopressor price[/url] [url=https://hydroxychloroquine.stream/]hydroxychloroquine tablets[/url] [url=https://cialisptabs.quest/]cialis generic 20 mg price[/url] [url=https://celebrex.fun/]celibrax[/url] [url=https://vardenafil.men/]generic levitra best price[/url]
Samuelraisk · August 18, 2022 at 6:20 pm
[url=http://anafranil.xyz/]anafranil cost[/url]
MichaelGuabe · August 18, 2022 at 6:27 pm
[url=http://hydroxychloroquine.stream/]plaquenil 200mg buy[/url]
Michaeldrist · August 18, 2022 at 6:30 pm
[url=https://cialisptabs.quest/]generic tadalafil usa[/url]
ZakCounk · August 18, 2022 at 6:43 pm
[url=https://cytotec.cfd/]cytotec canada[/url] [url=https://motilium.site/]motilium pharmacy[/url] [url=https://drugstore.fun/]pharmacy[/url]
SamCounk · August 18, 2022 at 6:49 pm
[url=http://trazodone.loan/]trazodone 25 mg brand name[/url] [url=http://hydroxychloroquine.sbs/]quineprox 0.5[/url] [url=http://chloroquine.boutique/]aralen medicine[/url] [url=http://hydrochlorothiazide.fun/]hydrochlorothiazide brand name india[/url] [url=http://plavix.cfd/]plavix 600[/url] [url=http://tretinoin.fun/]tretinoin 1 uk[/url] [url=http://flagyl.fun/]buy generic flagyl online[/url] [url=http://albendazole.run/]albendazole 200 mg price[/url]
CarlCounk · August 18, 2022 at 6:55 pm
[url=https://wellbutrin.life/]wellbutrin 300 mg coupon[/url]
TommyHepsy · August 18, 2022 at 7:06 pm
[url=https://escitalopram.fun/]lexapro cost australia[/url]
RichardFaply · August 18, 2022 at 7:14 pm
[url=http://provigil.xyz/]buy provigil 100mg[/url] [url=http://cialisptabs.quest/]buy cialis in usa[/url] [url=http://dexamethasone.cfd/]dexamethasone 5 mg[/url] [url=http://cleocin.fun/]cleocin 150 mg cost[/url] [url=http://plavix.site/]clopidogrel price in india[/url] [url=http://baclofen.fun/]order baclofen online usa[/url] [url=http://hydroxychloroquine.stream/]plaquenil tabs[/url]
MiaCounk · August 18, 2022 at 7:18 pm
[url=http://hydroxychloroquine.media/]quineprox 0.4[/url]
MiclTek · August 18, 2022 at 7:35 pm
[url=https://clopidogrel.xyz/]plavix 75 mg price in india[/url]
WimCounk · August 18, 2022 at 7:50 pm
[url=http://albuterol.golf/]no prescription proventil inhaler[/url]
Charlesaduse · August 18, 2022 at 7:57 pm
[url=http://ciprofloxacin.site/]cipro south africa[/url]
ZakCounk · August 18, 2022 at 8:00 pm
[url=https://acyclovir.sbs/]zovirax online usa[/url] [url=https://cytotec.cfd/]cytotec price uk[/url]
MiaCounk · August 18, 2022 at 8:03 pm
[url=http://trimox.fun/]order amoxicillin uk[/url]
RichardFaply · August 18, 2022 at 8:04 pm
[url=http://singulair.site/]singulair 960[/url] [url=http://baclofen.business/]lioresal 20 mg[/url] [url=http://atarax.fun/]atarax prescription uk[/url] [url=http://erectafil.site/]buy erectafil 20[/url] [url=http://valtrex.click/]valtrex australia buy[/url]
AmyCounk · August 18, 2022 at 8:09 pm
[url=https://bactrim.sbs/]purchase bactrim online[/url]
SamCounk · August 18, 2022 at 8:15 pm
[url=http://duloxetine.fun/]generic cymbalta[/url] [url=http://promethazine.cfd/]phenergan capsules[/url]
Davidhup · August 18, 2022 at 8:31 pm
[url=https://cialisvtab.monster/]buy tadalafil 10mg india[/url]
IvyCounk · August 18, 2022 at 8:36 pm
[url=http://kamagra.live/]kamagra 100mg oral jelly india[/url] [url=http://trazodone.loan/]trazodone 150 price[/url] [url=http://fluconazole.xyz/]diflucan over the counter[/url] [url=http://cytotec.cfd/]misoprostol 25 mcg price[/url] [url=http://acyclovir.sbs/]acyclovir discount coupon[/url]
AmyCounk · August 18, 2022 at 8:41 pm
[url=https://trental.cfd/]buy trental 400 mg online india[/url]
IvyCounk · August 18, 2022 at 8:49 pm
[url=http://cephalexin.fun/]can you buy cephalexin over the counter[/url] [url=http://paxil.click/]paxil canada pharmacy[/url] [url=http://acyclovir.sbs/]zovirax ointment cost[/url] [url=http://amoxil.site/]buy amoxil without prescription[/url] [url=http://hydroxychloroquine.sbs/]hydroxychloroquine buy online[/url] [url=http://trimox.fun/]where to get amoxicillin online[/url] [url=http://azithromycin.sbs/]azithromycin nz pharmacy[/url]
AshCounk · August 18, 2022 at 8:59 pm
[url=https://citalopram.guru/]citalopram no prescription[/url] [url=https://zithromaxa.com/]buy azithromycin online without prescription[/url] [url=https://suhagra24.com/]suhagra 100 online india[/url]
MaryCounk · August 18, 2022 at 9:02 pm
[url=https://duloxetine.fun/]best generic cymbalta[/url] [url=https://femaleviagra.cfd/]real viagra without prescription[/url] [url=https://strattera.life/]buy strattera 40 mg[/url] [url=https://toradol.xyz/]toradol script[/url] [url=https://wellbutrin.life/]zyban 150 mg generic[/url]
EyeCounk · August 18, 2022 at 9:08 pm
[url=http://hydrochlorothiazide.site/]hydrochlorothiazide prescription[/url] [url=http://estrace.xyz/]estrace generic drug[/url] [url=http://tretinoin.fun/]retin a cream for sale online[/url] [url=http://kamagra.live/]kamagra oral jelly india[/url]
YonCounk · August 18, 2022 at 9:19 pm
[url=https://fluconazole.xyz/]how can i get diflucan over the counter[/url]
MichaelGuabe · August 18, 2022 at 9:23 pm
[url=http://lopressor.site/]lopressor 25 mg generic[/url]
Michaeldrist · August 18, 2022 at 9:44 pm
[url=https://citalopram.fun/]50mg citalopram[/url]
Michaelemult · August 18, 2022 at 9:45 pm
[url=http://sumycin.xyz/]tetracycline 300 mg[/url]
MichaelGuabe · August 18, 2022 at 9:48 pm
[url=http://zestoretic.site/]zestoretic 20 12.5 mg[/url]
MichaelGuabe · August 18, 2022 at 9:52 pm
[url=http://albenza.site/]albenza canada over the counter[/url]
Charlesaduse · August 18, 2022 at 9:55 pm
[url=http://lisinopril.beauty/]lisinopril oral[/url]
WimCounk · August 18, 2022 at 10:00 pm
[url=http://modafinil.sale/]buy modafinil australia paypal[/url]
RichardFaply · August 18, 2022 at 10:30 pm
[url=http://lopressor.site/]lopressor 50 mg daily[/url] [url=http://advair.fun/]advair coupon[/url] [url=http://baclofen.business/]lioresal[/url] [url=http://vardenafil.men/]buy levitra canada online[/url] [url=http://plavix.site/]compare plavix prices[/url] [url=http://cialisvtab.monster/]tadalafil compare prices[/url] [url=http://aurogra.life/]aurogra 100[/url]
DavisMug · August 18, 2022 at 10:42 pm
[url=http://baclofen.business/]baclofen uk price[/url]
RodneyTab · August 18, 2022 at 10:42 pm
[url=http://baclofen.business/]40 mg baclofen[/url]
MaryCounk · August 18, 2022 at 10:49 pm
[url=https://trazodone.site/]trazodone 50mg prescription cost[/url] [url=https://flomax.fun/]flomax 4[/url] [url=https://metformin.fun/]6000 mg metformin[/url]
Samuelraisk · August 18, 2022 at 10:56 pm
[url=http://hydroxychloroquine.stream/]plaquenil generic cost[/url]
Davidhup · August 18, 2022 at 10:59 pm
[url=https://elimite.cfd/]acticin over the counter[/url]
SueCounk · August 18, 2022 at 11:07 pm
[url=http://trimox.fun/]amoxicillin trihydrate[/url]
Davidhup · August 18, 2022 at 11:14 pm
[url=https://metformin.bid/]metformin how to get[/url]
Charlesaduse · August 18, 2022 at 11:26 pm
[url=http://cialisptabs.quest/]tadalafil tablets 20 mg price[/url]
MarkCounk · August 18, 2022 at 11:28 pm
[url=https://hydrochlorothiazide.fun/]how much is hydrochlorothiazide[/url]
TeoCounk · August 18, 2022 at 11:35 pm
[url=https://drugstore.fun/]online pharmacy search[/url]
JoeCounk · August 18, 2022 at 11:48 pm
[url=https://estrace.xyz/]estrace 0.1 mg[/url] [url=https://zoloft.fun/]zoloft generic buy[/url]
YonCounk · August 18, 2022 at 11:54 pm
[url=https://viagradtabs.quest/]viagra sildenafil[/url]
PaulCounk · August 18, 2022 at 11:56 pm
[url=https://kamagra.live/]kamagra oral jelly legal in australia[/url]
AnnaCounk · August 19, 2022 at 12:06 am
[url=http://bactrim.sbs/]buy bactrim[/url]
TeoCounk · August 19, 2022 at 12:20 am
[url=https://cytotec.cfd/]cytotec for sale usa[/url]
Jameseloro · August 19, 2022 at 12:29 am
[url=http://albenza.site/]buy albendazole without prescription[/url] [url=http://anafranil.xyz/]anafranil 10 mg[/url] [url=http://tizanidine.site/]tizanidine 503[/url] [url=http://citalopram.fun/]citalopram 15 mg[/url] [url=http://metformin.bid/]metformin tablets[/url] [url=http://lyrica.icu/]lyrica 300 mg capsule[/url] [url=http://provigil.xyz/]order provigil from canada[/url] [url=http://erectafil.site/]erectafil 5[/url]
TeoCounk · August 19, 2022 at 12:33 am
[url=https://trazodone.loan/]trazodone price[/url]
RichardFaply · August 19, 2022 at 12:36 am
[url=http://cleocin.fun/]clindamycin tablets[/url] [url=http://dexamethasone.cfd/]where can you buy dexamethasone[/url] [url=http://atarax.fun/]12.5 mg atarax[/url] [url=http://elimite.cfd/]buy acticin online[/url] [url=http://cialisptabs.quest/]tadalafil brand name in india[/url] [url=http://sumycin.xyz/]tetracycline staining[/url] [url=http://singulair.site/]singulair eczema[/url] [url=http://albenza.site/]albendazole for sale[/url]
TedCounk · August 19, 2022 at 12:40 am
[url=https://tadalafil.team/]cialis tablets online[/url]
MarkCounk · August 19, 2022 at 1:05 am
[url=https://cephalexin.works/]cephalexin from canada[/url]
TommyHepsy · August 19, 2022 at 1:10 am
[url=https://albendazole.xyz/]albendazole tablet india[/url]
BooCounk · August 19, 2022 at 1:19 am
[url=https://triamterenedyrenium.monster/]water pill triamterene hctz[/url]
YonCounk · August 19, 2022 at 1:22 am
[url=https://acyclovir.sbs/]acyclovir online pharmacy[/url]
PaulCounk · August 19, 2022 at 1:24 am
[url=https://flomax.fun/]flomax sale online[/url]
PaulCounk · August 19, 2022 at 1:39 am
[url=https://aurogra.xyz/]aurogra 100mg tablets[/url]
JasonCounk · August 19, 2022 at 1:45 am
[url=http://promethazine.cfd/]phenergan capsules[/url]
Jameseloro · August 19, 2022 at 1:52 am
[url=http://zestoretic.site/]medication zestoretic[/url] [url=http://sumycin.xyz/]tetracycline 300 mg[/url]
RichardFaply · August 19, 2022 at 1:54 am
[url=http://malegra.site/]buy malegra 100 online[/url] [url=http://vermox.site/]vermox sale usa pharmacy[/url] [url=http://albenza.site/]albendazole 2 tabs[/url]
ZakCounk · August 19, 2022 at 2:01 am
[url=https://amoxil.site/]amoxicillin 500 mg price[/url] [url=https://zoloft.fun/]zoloft 250 mg daily[/url] [url=https://azithromycin.sbs/]zithromax z-pak[/url] [url=https://promethazine.site/]buy generic phenergan[/url] [url=https://flagyl.fun/]flagyl generic[/url] [url=https://viagradtabs.quest/]where to buy cheap viagra online[/url]
JaneCounk · August 19, 2022 at 2:09 am
[url=http://duloxetine.fun/]cymbalta cheap online[/url]
AshCounk · August 19, 2022 at 2:15 am
[url=https://isotretinoin.online/]how much is accutane cost[/url] [url=https://metformin.email/]metformin 850 mg tablet[/url] [url=https://atenolol.shop/]atenolol discount[/url] [url=https://amoxicillintabs.online/]augmentin 825 mg[/url]
DenCounk · August 19, 2022 at 2:20 am
[url=http://tadacip.site/]buy cheap tadacip[/url]
TedCounk · August 19, 2022 at 2:26 am
[url=https://augmentin.xyz/]amoxicillin 875 125 mg[/url]
SamCounk · August 19, 2022 at 3:04 am
[url=http://trental.cfd/]trental 400 australia[/url] [url=http://trimox.fun/]where can i buy amoxocillin[/url] [url=http://tadacip.site/]tadacip india price[/url] [url=http://prazosin.xyz/]prazosin sleep[/url] [url=http://glucophage.fun/]metformin with out a prescription[/url] [url=http://duloxetine.fun/]cymbalta online pharmacy price[/url] [url=http://wellbutrin.life/]generic wellbutrin canada[/url]
BooCounk · August 19, 2022 at 3:06 am
[url=https://diclofenac.digital/]buy diclofenac tablets online[/url]
Jameseloro · August 19, 2022 at 3:10 am
[url=http://advair.fun/]generic advair[/url] [url=http://vermox.site/]vermox mebendazole[/url] [url=http://tetracycline.fun/]sumycin without prescription[/url] [url=http://amoxicillin.party/]brand amoxil online[/url] [url=http://lyrica.icu/]buy lyrica online australia[/url]
Tinyurl.com · August 19, 2022 at 3:16 am
You choose insurance professionals who’re
right here for you earlier than, throughout, and after an insurance claim.
MichaelGuabe · August 19, 2022 at 3:21 am
[url=http://clopidogrel.xyz/]plavix generic india[/url]
YonCounk · August 19, 2022 at 3:32 am
[url=https://advair.site/]generic advair diskus canada[/url]
Samuelraisk · August 19, 2022 at 3:37 am
[url=http://vermox.site/]buy vermox 100mg[/url]
JackCounk · August 19, 2022 at 3:39 am
[url=https://tadalafil.moscow/]cialis best price canada[/url]
Jameseloro · August 19, 2022 at 4:00 am
[url=http://vardenafil.men/]vardenafil over the counter[/url] [url=http://baclofen.business/]baclofen cream australia[/url] [url=http://sumycin.xyz/]tetracycline 500mg capsules cost[/url] [url=http://prednisone.date/]prednisone 60[/url]
Michaelemult · August 19, 2022 at 4:03 am
[url=http://sumycin.site/]tetracycline price[/url]
TedCounk · August 19, 2022 at 4:03 am
[url=https://aurogra.xyz/]aurogra 100 uk[/url]
RobertFoold · August 19, 2022 at 4:09 am
[url=https://celebrex.fun/]celebrex tablets 200mg[/url]
MiaCounk · August 19, 2022 at 4:15 am
[url=http://trental.cfd/]trental 400[/url]
MiclTek · August 19, 2022 at 4:35 am
[url=https://prednisolone.run/]prednisolone 40 mg tablets[/url]
ZakCounk · August 19, 2022 at 4:39 am
[url=https://tadalafil.team/]cialis generic cheap[/url] [url=https://albendazole.run/]where can i buy albendazole over the counter[/url] [url=https://bactrim.sbs/]where can you get bactrim[/url] [url=https://flagyl.fun/]cost of flagyl[/url] [url=https://levofloxacin.fun/]levaquin 750mg[/url] [url=https://zoloft.fun/]500mg zoloft[/url] [url=https://cephalexin.works/]cephalexin 500 mg price in india[/url]
AnnaCounk · August 19, 2022 at 4:40 am
[url=http://trimox.fun/]amoxicillin medicine price[/url]
Samuelraisk · August 19, 2022 at 4:43 am
[url=http://prednisone.date/]prednisone 25g[/url]
NickCounk · August 19, 2022 at 4:52 am
[url=http://motilium.site/]motilium 10mg price[/url]
KimCounk · August 19, 2022 at 4:53 am
[url=https://cephalexin.works/]cephalexin 500mg no prescription[/url]
ElwoodGon · August 19, 2022 at 5:13 am
[url=https://atarax.fun/]atarax for children[/url]
RobertFoold · August 19, 2022 at 5:17 am
[url=https://lopressor.site/]lopressor 12.5 mg tablets[/url]
Edgarlor · August 19, 2022 at 5:17 am
[url=http://nexium.guru/]how much is generic nexium otc[/url]
RichardFaply · August 19, 2022 at 5:21 am
[url=http://amoxicillin.business/]augmentin antibiotics[/url] [url=http://hydroxychloroquine.stream/]plaquenil buy[/url] [url=http://tetracycline.fun/]tetracycline brand name in india[/url]
WimCounk · August 19, 2022 at 5:29 am
[url=http://erectafil.store/]erectafil 5mg[/url]
Curtisvibia · August 19, 2022 at 5:43 am
[url=https://vardenafil.men/]where can i buy levitra[/url]
ElwoodGon · August 19, 2022 at 5:51 am
[url=https://dexamethasone.cfd/]dexamethasone tablets australia[/url]
DenCounk · August 19, 2022 at 6:02 am
[url=http://effexor.fun/]wellbutrin effexor[/url]
CarlCounk · August 19, 2022 at 6:10 am
[url=https://kamagra.live/]where to buy kamagra[/url]
CarlCounk · August 19, 2022 at 6:25 am
[url=https://cephalexin.fun/]keflex 750 mg price[/url]
TimothyThive · August 19, 2022 at 6:32 am
[url=http://zoloft.click/]zoloft discount[/url]
Edgarlor · August 19, 2022 at 6:46 am
[url=http://cialisvtab.monster/]tadalafil pills online[/url]
ElwoodGon · August 19, 2022 at 6:48 am
[url=https://albendazole.xyz/]albendazole[/url]
PaulCounk · August 19, 2022 at 7:05 am
[url=https://tadalafil.moscow/]generic cialis for daily use[/url]
RobertFoold · August 19, 2022 at 7:16 am
[url=https://tizanidine.site/]buy zanaflex australia[/url]
MichaelGuabe · August 19, 2022 at 7:19 am
[url=http://albendazole.xyz/]albendazole 400 mg online[/url]
LisaCounk · August 19, 2022 at 7:55 am
[url=https://fildena.xyz/]fildena 150 online[/url]
SueCounk · August 19, 2022 at 8:07 am
[url=http://promethazine.site/]buy phenergan over the counter[/url]
ElwoodGon · August 19, 2022 at 8:08 am
[url=https://cialisptabs.quest/]buy cheap generic cialis[/url]
MaryCounk · August 19, 2022 at 8:30 am
[url=https://wellbutrin.life/]generic wellbutrin sr[/url] [url=https://hydrochlorothiazide.site/]amlodipine hydrochlorothiazide[/url] [url=https://kamagra.live/]buy cheap generic viagra co uk kamagra oral jelly 100mg[/url] [url=https://hydroxychloroquine.media/]plaquenil 200 mg 60 tab[/url]
JaneCounk · August 19, 2022 at 8:32 am
[url=http://hydroxychloroquine.sbs/]hydroxychloroquine 40 mg[/url]
ElwoodGon · August 19, 2022 at 8:33 am
[url=https://citalopram.fun/]cost of celexa 20 mg[/url]
UgoCounk · August 19, 2022 at 8:35 am
[url=http://avodart.digital/]avodart for sale online[/url]
UgoCounk · August 19, 2022 at 8:39 am
[url=http://levitragenuine.com/]levitra 75 mg[/url]
DarrylSef · August 19, 2022 at 8:39 am
[url=https://lopressor.site/]lopressor medication[/url] [url=https://cialisptabs.quest/]cialis 5mg canada[/url] [url=https://amoxicillin.party/]amoxicillin 500mg online uk[/url] [url=https://zestoretic.site/]zestoretic[/url] [url=https://lyrica.icu/]lyrica online purchase[/url] [url=https://amoxicillin.business/]augmentin online buy without prescription[/url] [url=https://baclofen.business/]lioresal 10[/url] [url=https://sumycin.xyz/]tetracyclin[/url]
EyeCounk · August 19, 2022 at 8:44 am
[url=http://fildena.xyz/]fildena 150 mg[/url] [url=http://bactrim.sbs/]bactrim purchase[/url] [url=http://motilium.site/]online pharmacy motilium[/url] [url=http://cephalexin.fun/]buy keftab[/url] [url=http://viagradtabs.quest/]online pharmacy viagra prescription[/url] [url=http://azithromycin.sbs/]zithromax no prescription[/url] [url=http://glucophage.fun/]1000 mg metformin coupon pharmacy[/url]
JudyCounk · August 19, 2022 at 8:49 am
[url=https://tadalafil.moscow/]cialis online ordering[/url]
EvaCounk · August 19, 2022 at 8:58 am
[url=http://amoxil.site/]rx amoxicillin 500mg[/url]
IvyCounk · August 19, 2022 at 9:03 am
[url=http://viagradtabs.quest/]via gra[/url] [url=http://hydroxychloroquine.media/]quineprox 60[/url] [url=http://flomax.fun/]generic flomax[/url] [url=http://plavix.cfd/]plavix pharmacy[/url]
Samuelraisk · August 19, 2022 at 9:19 am
[url=http://cialisptabs.quest/]tadalafil tablets 2.5mg india[/url]
DenCounk · August 19, 2022 at 9:20 am
[url=http://acyclovir.sbs/]acyclovir purchase[/url]
YonCounk · August 19, 2022 at 9:23 am
[url=https://azithromycin.sbs/]azithromycin tabs 500mg[/url]
EyeCounk · August 19, 2022 at 9:27 am
[url=http://azithromycin.sbs/]order azithromycin from mexico[/url] [url=http://retina.run/]best tretinoin cream in india[/url] [url=http://trental.cfd/]trental generic cost[/url] [url=http://motilium.site/]motilium in mexico[/url] [url=http://aurogra.xyz/]aurogra 100 uk[/url] [url=http://paxil.click/]paxil ssri[/url] [url=http://toradol.xyz/]toradol pain[/url] [url=http://tadalafil.team/]tadalafil 22 mg[/url]
Edgarlor · August 19, 2022 at 9:42 am
[url=http://cialisptabs.quest/]generic cialis 20 mg[/url]
TimothyThive · August 19, 2022 at 10:00 am
[url=http://baclofen.business/]baclofen 25[/url]
PaulCounk · August 19, 2022 at 10:17 am
[url=https://flomax.fun/]flomax generic brand[/url]
ZakCounk · August 19, 2022 at 10:17 am
[url=https://promethazine.site/]phenergan tablet cost[/url] [url=https://trimox.fun/]augmentin 1000 mg cost[/url] [url=https://wellbutrin.life/]bupropion tab 75mg[/url] [url=https://drugstore.fun/]northern pharmacy[/url]
AlanCounk · August 19, 2022 at 10:20 am
[url=https://hydroxychloroquine.sbs/]buy hydroxychloroquine sulfate[/url] [url=https://fildena.xyz/]fildena[/url] [url=https://cytotec.cfd/]buy misoprostol online usa[/url]
TimothyThive · August 19, 2022 at 10:38 am
[url=http://ampicillin.sbs/]where can i buy ampicillin[/url]
JackCounk · August 19, 2022 at 11:07 am
[url=https://tadalafil.team/]tadalafil no prescription[/url]
JackCounk · August 19, 2022 at 11:10 am
[url=https://trazodone.site/]generic for desyrel[/url]
KimCounk · August 19, 2022 at 11:22 am
[url=https://metformin.fun/]metformin er 500[/url]
Samuelraisk · August 19, 2022 at 11:24 am
[url=http://vardenafil.men/]buy levitra india[/url]
SueCounk · August 19, 2022 at 11:43 am
[url=http://trazodone.site/]desyrel 50 mg tab[/url]
MichaelGuabe · August 19, 2022 at 11:46 am
[url=http://sumycin.site/]buy sumycin online[/url]
IvyCounk · August 19, 2022 at 12:00 pm
[url=http://trimox.fun/]buy amoxil[/url] [url=http://hydroxychloroquine.media/]hydroxychloroquine 200 mg tablet[/url] [url=http://femaleviagra.cfd/]generic viagra best price[/url]
SamCounk · August 19, 2022 at 12:05 pm
[url=http://acyclovir.sbs/]zovirax 5 ointment[/url] [url=http://trazodone.loan/]trazodone canada brand[/url] [url=http://albendazole.run/]buy albendazole 400 mg[/url] [url=http://promethazine.cfd/]phenergan on line[/url] [url=http://viagradtabs.quest/]viagra cheap prescription[/url] [url=http://prazosin.xyz/]prazosin brand name[/url] [url=http://promethazine.site/]phenergan without prescription[/url] [url=http://wellbutrin.life/]bupropion cost in india[/url]
Jameseloro · August 19, 2022 at 12:12 pm
[url=http://propranolol.site/]propranolol pill[/url] [url=http://singulair.site/]singulair tablet 4mg[/url] [url=http://malegra.site/]malegra 120 mg[/url] [url=http://viagrautab.monster/]viagra 100 buy[/url] [url=http://escitalopram.fun/]lexapro 10mg generic[/url] [url=http://baclofen.fun/]baclofen india brand name[/url] [url=http://metformin.bid/]where to buy metformin 1000 mg[/url]
UgoCounk · August 19, 2022 at 12:25 pm
[url=http://metformin.solutions/]where can i get metformin without prescription[/url]
IvyCounk · August 19, 2022 at 12:30 pm
[url=http://aurogra.xyz/]aurogra tablets[/url] [url=http://promethazine.cfd/]phenergan 10mg tablet india[/url] [url=http://prazosin.xyz/]prazosin brand name[/url] [url=http://hydrochlorothiazide.site/]hydrochlorothiazide cost[/url] [url=http://hydroxychloroquine.media/]hydroxychloroquine sulfate oral[/url] [url=http://levofloxacin.fun/]levaquin tablets[/url]
JaneCounk · August 19, 2022 at 12:32 pm
[url=http://duloxetine.fun/]pharmacy prices for cymbalta[/url]
SamCounk · August 19, 2022 at 12:43 pm
[url=http://metformin.fun/]metformin 500 mg er[/url] [url=http://estrace.xyz/]estrace cream generic purchase[/url] [url=http://hydroxychloroquine.media/]plaquenil[/url] [url=http://prazosin.xyz/]prazosin price[/url] [url=http://motilium.site/]motilium price south africa[/url] [url=http://toradol.xyz/]can i buy toradol over the counter[/url] [url=http://tadalafil.team/]cialis capsule price[/url]
MiaCounk · August 19, 2022 at 12:46 pm
[url=http://zoloft.fun/]zoloft 100[/url]
JoeCounk · August 19, 2022 at 12:46 pm
[url=https://tretinoin.fun/]retin a 0.25 cream price[/url] [url=https://augmentin.xyz/]amoxicillin oral[/url] [url=https://strattera.life/]how to buy strattera[/url] [url=https://effexor.fun/]effexor 2019[/url] [url=https://acyclovir.sbs/]zovirax online[/url] [url=https://motilium.site/]motilium 10 mg tablet[/url]
RicIsose · August 19, 2022 at 12:46 pm
[url=https://strattera.fun/]strattera 18 mg coupon[/url] [url=https://vermox.site/]where to buy vermox in canada[/url] [url=https://singulair.site/]singulair tab 5mg[/url] [url=https://malegra.site/]buy malegra 50[/url] [url=https://aurogra.life/]aurogra 100 online[/url] [url=https://lopressor.site/]lopressor 5 mg[/url]
WilliamWem · August 19, 2022 at 12:47 pm
[url=https://tizanidine.site/]cost tizanidine[/url] [url=https://sumycin.site/]tetracycline tablet price[/url] [url=https://cleocin.fun/]clindamycin 300 mg prescription[/url] [url=https://prednisolone.boutique/]prednisolone brand name australia[/url] [url=https://prednisone.date/]prednisone 16 mg[/url] [url=https://valtrex.click/]valtrex brand[/url] [url=https://prednisolone.run/]predisolone online[/url] [url=https://albendazole.xyz/]albendazole over the counter[/url]
Samuelraisk · August 19, 2022 at 12:51 pm
[url=http://citalopram.fun/]citalopram online india[/url]
SueCounk · August 19, 2022 at 1:06 pm
[url=http://trental.cfd/]trental 400 mg online india[/url]
Samuelraisk · August 19, 2022 at 1:07 pm
[url=http://amoxicillin.party/]augmentin 875mg[/url]
Jameseloro · August 19, 2022 at 1:14 pm
[url=http://nexium.guru/]nexium india[/url] [url=http://metformin.bid/]glucophage 500 price[/url] [url=http://zoloft.business/]zoloft discount[/url] [url=http://prednisolone.run/]prednisolone brand name india[/url]
Michaelemult · August 19, 2022 at 1:48 pm
[url=http://celebrex.fun/]celebrex rx[/url]
ZakCounk · August 19, 2022 at 1:50 pm
[url=https://tadalafil.moscow/]canada drug pharmacy cialis[/url] [url=https://effexor.fun/]can i buy effexor online[/url] [url=https://bactrim.sbs/]bactrim pill[/url] [url=https://zoloft.fun/]zoloft cost 25mg[/url]
Davidhup · August 19, 2022 at 2:30 pm
[url=https://advair.fun/]over the counter advair diskus[/url]
JosephMaict · August 19, 2022 at 2:37 pm
[url=http://anafranil.xyz/]anafranil for depression[/url] [url=http://hydroxychloroquine.stream/]plaquenil skin rash[/url] [url=http://lopressor.site/]lopressor 50 mg cost[/url]
LisaCounk · August 19, 2022 at 2:42 pm
[url=https://tretinoin.fun/]where to buy tretinoin cream uk[/url]
RichardFaply · August 19, 2022 at 2:54 pm
[url=http://antabuse.fun/]disulfiram brand in india[/url] [url=http://zoloft.business/]buy zoloft without a prescription[/url] [url=http://metformin.bid/]glucophage brand name price[/url]
AlanCounk · August 19, 2022 at 3:05 pm
[url=https://viagradtabs.quest/]buy viagra pills uk[/url] [url=https://glucophage.fun/]metformin 850mg[/url] [url=https://levofloxacin.fun/]antibiotics levaquin[/url]
UgoCounk · August 19, 2022 at 3:26 pm
[url=http://isotretinoin.online/]buy accutane nz[/url]
TedCounk · August 19, 2022 at 3:31 pm
[url=https://tadalafil.team/]cialis pill 5mg[/url]
YonCounk · August 19, 2022 at 3:34 pm
[url=https://toradol.xyz/]toradol daily[/url]
MiclTek · August 19, 2022 at 3:44 pm
[url=https://propranolol.site/]order propranolol online[/url]
PaulCounk · August 19, 2022 at 3:53 pm
[url=https://estrace.xyz/]estrace tablets[/url]
WimCounk · August 19, 2022 at 3:58 pm
[url=http://propecia.sale/]propecia cost usa[/url]
EyeCounk · August 19, 2022 at 4:01 pm
[url=http://fluconazole.xyz/]purchase diflucan online[/url] [url=http://hydroxychloroquine.sbs/]cost of generic hydroxychloroquine[/url]
Estebanguall · August 19, 2022 at 4:03 pm
[url=http://lyrica.icu/]2019 lyrica coupon[/url]
MiclTek · August 19, 2022 at 4:08 pm
[url=https://dexamethasone.cfd/]dexamethasone 6 tablet[/url]
BooCounk · August 19, 2022 at 4:20 pm
[url=https://lipitortab.com/]lowest price lipitor[/url]
NickCounk · August 19, 2022 at 4:22 pm
[url=http://cytotec.cfd/]how can i get misoprostol[/url]
WimCounk · August 19, 2022 at 4:39 pm
[url=http://synthroid.works/]generic synthroid canada[/url]
Edgarlor · August 19, 2022 at 4:43 pm
[url=http://prednisolone.run/]50 prednisolone[/url]
CarlCounk · August 19, 2022 at 5:02 pm
[url=https://cephalexin.fun/]buy cephalexin online uk[/url]
AnnaCounk · August 19, 2022 at 5:03 pm
[url=http://tadalafil.team/]where to buy generic tadalafil[/url]
Edgarlor · August 19, 2022 at 5:07 pm
[url=http://baclofen.fun/]baclofen 10mg pill[/url]
MarkCounk · August 19, 2022 at 5:07 pm
[url=https://levofloxacin.fun/]levaquin pill[/url]
TommyHepsy · August 19, 2022 at 5:31 pm
[url=https://provigil.xyz/]generic provigil prices[/url]
AmyCounk · August 19, 2022 at 5:35 pm
[url=https://cephalexin.works/]cephalexin 500 mg capsule price[/url]
AshCounk · August 19, 2022 at 5:51 pm
[url=https://tbpills.com/]where can i buy generic prozac[/url] [url=https://piroxicamfeldene.quest/]piroxicam 0.5 gel[/url] [url=https://medrol.boutique/]purchase medrol[/url] [url=https://dipiridamole.com/]dipyridamole buy[/url] [url=https://valtrex.shop/]where can i buy valtrex over the counter[/url] [url=https://chloroquinepak.com/]where to buy chloroquine[/url] [url=https://celecoxib.shop/]celebrex cost uk[/url] [url=https://budesonide.shop/]budesonide pill[/url]
JasonCounk · August 19, 2022 at 6:03 pm
[url=http://viagradtabs.quest/]sildenafil medicine[/url]
RichardFaply · August 19, 2022 at 6:04 pm
[url=http://ampicillin.sbs/]buy ampicillin without prescription[/url] [url=http://anafranil.xyz/]anafranil 25 mg price[/url] [url=http://dexamethasone.cfd/]dexamethasone 5 mg tablet[/url] [url=http://strattera.fun/]240 mg strattera[/url]
Charlesaduse · August 19, 2022 at 6:07 pm
[url=http://tetracycline.fun/]cheapest terramycin[/url]
SamCounk · August 19, 2022 at 6:09 pm
[url=http://viagradtabs.quest/]buying viagra over the counter in usa[/url] [url=http://duloxetine.fun/]cymbalta cost generic[/url] [url=http://trazodone.site/]trazodone 9 mg[/url] [url=http://cephalexin.fun/]cephalexin[/url] [url=http://kamagra.live/]kamagra oral jelly 100 mg open[/url] [url=http://hydroxychloroquine.media/]hydroxychloroquine sulfate 300 mg[/url] [url=http://hydroxychloroquine.sbs/]plaquenil 300 mg[/url] [url=http://fildena.xyz/]fildena usa[/url]
Edgarlor · August 19, 2022 at 6:24 pm
[url=http://antabuse.fun/]antabuse pills[/url]
AmyCounk · August 19, 2022 at 6:24 pm
[url=https://strattera.life/]canadian pharmacy strattera[/url]
DarrylSef · August 19, 2022 at 6:27 pm
[url=https://lyrica.icu/]cost of lyrica medication[/url] [url=https://nexium.guru/]nexium price[/url] [url=https://ampicillin.sbs/]ampicillin cream[/url] [url=https://plavix.site/]plavix 75 mg cost[/url] [url=https://tetracycline.fun/]buy tetracycline[/url] [url=https://valtrex.click/]valtrex over the counter[/url]
Davidhup · August 19, 2022 at 6:30 pm
[url=https://nexium.guru/]nexium uk cost[/url]
JudyCounk · August 19, 2022 at 6:36 pm
[url=https://fluconazole.xyz/]diflucan 250 mg[/url]
MarkCounk · August 19, 2022 at 6:39 pm
[url=https://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg tab[/url]
MichaelDwego · August 19, 2022 at 6:51 pm
[url=https://prednisolone.boutique/]prednisolone 1 cost[/url]
JaneCounk · August 19, 2022 at 6:53 pm
[url=http://paxil.click/]paroxetine cheap[/url]
KiaCounk · August 19, 2022 at 6:59 pm
[url=http://viagradtabs.quest/]viagra for woman[/url]
TommyHepsy · August 19, 2022 at 7:08 pm
[url=https://viagrautab.monster/]buy viagra online pharmacy[/url]
Curtisvibia · August 19, 2022 at 7:14 pm
[url=https://celebrex.fun/]can you buy celebrex over the counter in canada[/url]
SueCounk · August 19, 2022 at 7:15 pm
[url=http://trimox.fun/]augmentin 875 script[/url]
TommyHepsy · August 19, 2022 at 7:26 pm
[url=https://escitalopram.fun/]lexapro best price[/url]
AmyCounk · August 19, 2022 at 7:28 pm
[url=https://tretinoin.fun/]how to get retin a in uk[/url]
JudyCounk · August 19, 2022 at 7:30 pm
[url=https://toradol.xyz/]how to get toradol[/url]
MichaelGuabe · August 19, 2022 at 7:34 pm
[url=http://dexamethasone.cfd/]dexamethasone 8 mg tablets[/url]
JoeCounk · August 19, 2022 at 7:36 pm
[url=https://amoxil.site/]amoxicillin 25 mg[/url] [url=https://tadalafil.moscow/]buy cialis 100mg online[/url] [url=https://promethazine.cfd/]can you buy phenergan over the counter nz[/url] [url=https://acyclovir.sbs/]acyclovir online canada[/url] [url=https://effexor.fun/]effexor price[/url] [url=https://wellbutrin.life/]zyban[/url] [url=https://metformin.fun/]glucophage compare[/url]
KiaCounk · August 19, 2022 at 7:39 pm
[url=http://tizanidine.fun/]tizanidine otc[/url]
DavisMug · August 19, 2022 at 7:39 pm
[url=http://anafranil.xyz/]anafranil 25[/url]
Michaelemult · August 19, 2022 at 7:43 pm
[url=http://tetracycline.fun/]sumycin 250 mg[/url]
MiclTek · August 19, 2022 at 8:01 pm
[url=https://prednisone.date/]buy prednisone without a prescription best price[/url]
JackCounk · August 19, 2022 at 8:12 pm
[url=https://hydroxychloroquine.sbs/]plaquenil 200 mg 30 film tablet[/url]
JaneCounk · August 19, 2022 at 8:41 pm
[url=http://hydrochlorothiazide.fun/]zestoretic cost[/url]
NickCounk · August 19, 2022 at 8:50 pm
[url=http://hydrochlorothiazide.site/]zestoretic 20 12.5 mg[/url]
MiclTek · August 19, 2022 at 8:53 pm
[url=https://lopressor.site/]lopressor 12.5 mg tablets[/url]
DenCounk · August 19, 2022 at 9:28 pm
[url=http://hydroxychloroquine.media/]hydroxychloroquine antiviral[/url]
NickCounk · August 19, 2022 at 9:33 pm
[url=http://estrace.xyz/]estrace cream price canada[/url]
TeoCounk · August 19, 2022 at 9:35 pm
[url=https://azithromycin.sbs/]zithromax canada[/url]
RodneyTab · August 19, 2022 at 9:49 pm
[url=http://antabuse.fun/]disulfiram price in india[/url]
AmyCounk · August 19, 2022 at 9:53 pm
[url=https://tadalafil.moscow/]online cialis paypal[/url]
CarlCounk · August 19, 2022 at 9:56 pm
[url=https://tretinoin.fun/]tretinoin cheapest price[/url]
Estebanguall · August 19, 2022 at 10:10 pm
[url=http://nexium.guru/]generic nexium from canada[/url]
JimCounk · August 19, 2022 at 10:52 pm
[url=https://fildena.xyz/]where to buy fildena[/url]
Estebanguall · August 19, 2022 at 10:53 pm
[url=http://tizanidine.site/]zanaflex pills[/url]
DavisMug · August 19, 2022 at 10:59 pm
[url=http://malegra.site/]malegra 25[/url]
SueCounk · August 19, 2022 at 11:14 pm
[url=http://trental.cfd/]trental 400 mg tablet[/url]
RichardFaply · August 19, 2022 at 11:42 pm
[url=http://cialisvtab.monster/]tadalafil chewable tablets 20 mg[/url] [url=http://prednisolone.run/]prednisolone 4 mg tablets[/url] [url=http://antabuse.fun/]where to buy antabuse[/url] [url=http://propranolol.site/]inderal tablets 40mg[/url] [url=http://nexium.guru/]nexium pills for sale[/url] [url=http://vardenafil.men/]levitra drug[/url] [url=http://escitalopram.fun/]lexapro 10 mg price[/url]
LisaCounk · August 19, 2022 at 11:44 pm
[url=https://drugstore.fun/]mail order pharmacy india[/url]
ElwoodGon · August 19, 2022 at 11:48 pm
[url=https://escitalopram.fun/]lexapro 15 mg tablets[/url]
BooCounk · August 19, 2022 at 11:52 pm
[url=https://modafinil.digital/]where to buy provigil[/url]
JaneCounk · August 20, 2022 at 12:00 am
[url=http://metformin.fun/]best generic metformin[/url]
KimCounk · August 20, 2022 at 12:03 am
[url=https://fluconazole.xyz/]can you diflucan over the counter[/url]
WimCounk · August 20, 2022 at 12:06 am
[url=http://sildallis.com/]sildalis for sale[/url]
SamCounk · August 20, 2022 at 12:20 am
[url=http://fildena.xyz/]fildena 25[/url] [url=http://azithromycin.sbs/]azithromycin without prescription online[/url] [url=http://hydroxychloroquine.media/]plaquenil 100 mg[/url] [url=http://hydrochlorothiazide.fun/]hydrochlorothiazide 25 mg tab[/url]
AlanCounk · August 20, 2022 at 12:21 am
[url=https://hydroxychloroquine.sbs/]hydroxychloroquine 100 mg tablet[/url] [url=https://advair.site/]advair diskus 250 50 mcg[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 25 mg online[/url] [url=https://paxil.click/]paxil pill price[/url] [url=https://glucophage.fun/]metformin 2017[/url]
JimCounk · August 20, 2022 at 12:24 am
[url=https://flomax.fun/]flomax online[/url]
ElwoodGon · August 20, 2022 at 12:33 am
[url=https://cialisptabs.quest/]tadalafil 5mg tablets india[/url]
NickCounk · August 20, 2022 at 12:37 am
[url=http://hydrochlorothiazide.site/]hydrochlorothiazide tab 100 mg[/url]
DarrylSef · August 20, 2022 at 12:39 am
[url=https://dexamethasone.cfd/]dexamethasone brand[/url] [url=https://cleocin.fun/]how can i get clindamycin[/url] [url=https://vardenafil.men/]buy vardenafil[/url] [url=https://sumycin.site/]tetracycline 125 mg[/url] [url=https://zoloft.click/]zoloft 15 mg[/url] [url=https://sumycin.xyz/]tetracycline cost[/url] [url=https://escitalopram.fun/]lexapro generic online[/url]
EyeCounk · August 20, 2022 at 12:49 am
[url=http://effexor.fun/]effexor 75mg coupon[/url] [url=http://trimox.fun/]augmentin 875 mg 125 mg tablets[/url] [url=http://tadalafil.team/]tadalafil capsules for sale[/url] [url=http://cytotec.cfd/]how much is cytotec pills[/url] [url=http://chloroquine.boutique/]aralen otc[/url]
YonCounk · August 20, 2022 at 12:59 am
[url=https://strattera.life/]cost of strattera without insurance[/url]
DarrylSef · August 20, 2022 at 1:08 am
[url=https://albenza.site/]albendazole price in usa[/url] [url=https://nexium.guru/]cheap nexium[/url] [url=https://vermox.site/]vermox price in south africa[/url] [url=https://cialisvtab.monster/]cheap cialis uk[/url] [url=https://amoxicillin.party/]augmentin generic tablets[/url] [url=https://elimite.cfd/]where can i buy elimite cream over the counter[/url] [url=https://erectafil.site/]erectafil 5mg[/url] [url=https://clopidogrel.xyz/]medication plavix[/url]
RichardFaply · August 20, 2022 at 1:08 am
[url=http://strattera.fun/]strattera brand name coupon[/url] [url=http://antabuse.fun/]rx disulfiram tablets[/url] [url=http://sumycin.site/]purchase tetracycline online[/url]
ZakCounk · August 20, 2022 at 1:15 am
[url=https://chloroquine.boutique/]chloroquine 20[/url] [url=https://hydrochlorothiazide.fun/]zestoretic 25[/url]
JaneCounk · August 20, 2022 at 1:19 am
[url=http://trazodone.site/]trazodone 25[/url]
Michaelemult · August 20, 2022 at 1:23 am
[url=http://zestoretic.site/]zestoretic coupon[/url]
DavisMug · August 20, 2022 at 1:25 am
[url=http://antabuse.fun/]cost of antabuse in australia[/url]
RodneyTab · August 20, 2022 at 1:27 am
[url=http://plavix.site/]plavix 70 mg[/url]
DarrylSef · August 20, 2022 at 1:28 am
[url=https://escitalopram.fun/]lexapro 10mg[/url] [url=https://singulair.site/]singulair tablets 5mg[/url] [url=https://malegra.site/]malegra for sale[/url]
CarlCounk · August 20, 2022 at 1:32 am
[url=https://tretinoin.fun/]tretinoin 0125[/url]
ElwoodGon · August 20, 2022 at 1:33 am
[url=https://plavix.site/]plavix 300[/url]
JackCounk · August 20, 2022 at 1:36 am
[url=https://hydroxychloroquine.sbs/]hydroxychloroquine online[/url]
RichardFaply · August 20, 2022 at 1:36 am
[url=http://vermox.site/]purchase vermox[/url] [url=http://celebrex.fun/]celebrex cheapest price[/url] [url=http://plavix.site/]plavix without prescription[/url] [url=http://ciprofloxacin.site/]ciprofloxacin uk[/url]
Davidhup · August 20, 2022 at 1:37 am
[url=https://sumycin.site/]buy tetracycline online without prescription[/url]
IvyCounk · August 20, 2022 at 1:37 am
[url=http://cephalexin.fun/]cephalexin 250 mg cost[/url] [url=http://strattera.life/]generic strattera online[/url] [url=http://femaleviagra.cfd/]buy viagra price[/url] [url=http://fluconazole.xyz/]where to buy diflucan pills[/url] [url=http://cephalexin.works/]cephalexin 750 mg tablets[/url]
AlanCounk · August 20, 2022 at 1:45 am
[url=https://cephalexin.fun/]buy cheap generic keflex[/url] [url=https://trental.cfd/]trental tablet[/url] [url=https://tadalafil.moscow/]buy cialis online fast delivery[/url]
AshCounk · August 20, 2022 at 1:56 am
[url=https://buycipro.store/]cipro.com[/url] [url=https://budecortbudesonide.quest/]cheap budesonide[/url] [url=https://proscartabs.com/]propecia[/url] [url=https://finasteride.directory/]finasteride buy online[/url] [url=https://lexapro.live/]buy lexapro online india[/url] [url=https://strattera.digital/]generic atomoxetine[/url] [url=https://lyrica.live/]buy lyrica 150mg[/url] [url=https://modafiniltablet.com/]buy real modafinil[/url]
JackCounk · August 20, 2022 at 2:01 am
[url=https://hydroxychloroquine.media/]plaquenil discount[/url]
JosephMaict · August 20, 2022 at 2:15 am
[url=http://hydroxychloroquine.stream/]hydroxychloroquine 70 mg[/url] [url=http://vermox.site/]vermox generic[/url] [url=http://aurogra.life/]aurogra 100 prices[/url] [url=http://singulair.site/]otc singulair equivalent[/url] [url=http://zestoretic.site/]zestoretic cost[/url]
IvyCounk · August 20, 2022 at 2:16 am
[url=http://fildena.xyz/]buy fildena[/url] [url=http://advair.site/]advair 125 mg[/url] [url=http://tizanidine.fun/]tizanidine cost india[/url]
Edgarlor · August 20, 2022 at 2:17 am
[url=http://clopidogrel.xyz/]plavix pharmacy[/url]
MarkCounk · August 20, 2022 at 2:22 am
[url=https://flomax.fun/]flomax 0.4 mg tab[/url]
MiaCounk · August 20, 2022 at 2:26 am
[url=http://acyclovir.sbs/]acyclovir 400 mg for sale[/url]
SamCounk · August 20, 2022 at 2:30 am
[url=http://augmentin.xyz/]amoxicillin 825mg[/url] [url=http://glucophage.fun/]metformin 500 mg pill[/url] [url=http://kamagra.live/]buy kamagra online usa[/url] [url=http://hydroxychloroquine.sbs/]plaquenil capsule[/url] [url=http://cephalexin.works/]2000 mg cephalexin[/url] [url=http://tadacip.site/]order tadacip 20 mg[/url]
DavisMug · August 20, 2022 at 2:40 am
[url=http://atarax.fun/]atarax tablet price[/url]
ZakCounk · August 20, 2022 at 2:55 am
[url=https://promethazine.site/]phenergan 12.5 mg[/url] [url=https://trazodone.site/]trazodone 50 mg over the counter[/url] [url=https://promethazine.cfd/]phenergan generic brand[/url] [url=https://augmentin.xyz/]augmentin price singapore[/url]
DarrylSef · August 20, 2022 at 3:00 am
[url=https://vardenafil.men/]generic levitra online canada[/url] [url=https://metformin.bid/]metformin 227[/url] [url=https://amoxicillin.business/]amoxicillin 100 mg[/url] [url=https://ciprofloxacin.site/]ciprofloxacin price in india[/url] [url=https://lisinopril.beauty/]lisinopril 20 mg brand name[/url] [url=https://vermox.site/]where to buy vermox in canada[/url] [url=https://cialisvtab.monster/]brand cialis singapore[/url]
MaryCounk · August 20, 2022 at 3:18 am
[url=https://hydrochlorothiazide.site/]zestoretic 25[/url] [url=https://drugstore.fun/]pharmaceutical online[/url] [url=https://estrace.xyz/]estrace cream where to buy[/url] [url=https://acyclovir.sbs/]zovirax pills canada[/url] [url=https://aurogra.xyz/]aurogra 100mg tablets[/url]
MarkCounk · August 20, 2022 at 3:38 am
[url=https://hydroxychloroquine.sbs/]plaquenil skin rash[/url]
JaneCounk · August 20, 2022 at 3:46 am
[url=http://tadacip.site/]where to buy tadacip[/url]
SueCounk · August 20, 2022 at 3:51 am
[url=http://tadacip.site/]tadacip online uk[/url]
DenCounk · August 20, 2022 at 3:56 am
[url=http://wellbutrin.life/]bupropion xl 150mg[/url]
WimCounk · August 20, 2022 at 3:57 am
[url=http://zithromax.cfd/]buy azithromycin over the counter uk[/url]
RicIsose · August 20, 2022 at 3:58 am
[url=https://sumycin.xyz/]tetracycline 500mg for sale[/url] [url=https://baclofen.business/]baclofen 10 brand name[/url] [url=https://antabuse.fun/]antabuse australia prescription[/url] [url=https://elimite.cfd/]order elimite online[/url] [url=https://tizanidine.site/]tizanidine cheap[/url] [url=https://amoxicillin.party/]augmentin 1000mg price[/url] [url=https://escitalopram.fun/]lexapro rx[/url]
MarvinZem · August 20, 2022 at 4:14 am
[url=https://elimite.cfd/]elimite 5 cream price[/url]
MaryCounk · August 20, 2022 at 4:26 am
[url=https://fildena.xyz/]order fildena online[/url] [url=https://paxil.click/]paxil weight loss[/url]
MaryCounk · August 20, 2022 at 4:40 am
[url=https://tizanidine.fun/]buy tizanidine 4mg[/url] [url=https://plavix.cfd/]clopidogrel medicine[/url] [url=https://acyclovir.sbs/]zovirax 400 tablet price[/url] [url=https://metformin.fun/]where to buy metformin cream[/url] [url=https://hydrochlorothiazide.site/]hydrochlorothiazide 50mg tab[/url]
TedCounk · August 20, 2022 at 5:08 am
[url=https://hydrochlorothiazide.fun/]hydrochlorothiazide 25 mg over the counter[/url]
ElwoodGon · August 20, 2022 at 5:29 am
[url=https://aurogra.life/]aurogra[/url]
AnnaCounk · August 20, 2022 at 5:33 am
[url=http://prazosin.xyz/]prazosin 2mg capsules[/url]
SamCounk · August 20, 2022 at 5:38 am
[url=http://trazodone.site/]trazodone 100 mg cost[/url] [url=http://plavix.cfd/]plavix 150 mg[/url] [url=http://zoloft.fun/]sertraline zoloft[/url] [url=http://motilium.site/]motilium uk pharmacy[/url] [url=http://amoxil.site/]how to buy amoxicillin online[/url] [url=http://promethazine.cfd/]phenergan 30 mg[/url]
MaryCounk · August 20, 2022 at 5:49 am
[url=https://albendazole.run/]albendazole nz[/url] [url=https://trazodone.loan/]trazodone online cheap free shipping[/url] [url=https://tadacip.site/]tadacip 5mg[/url] [url=https://metformin.fun/]metformin coupon pharmacy[/url] [url=https://plavix.cfd/]plavix 2018[/url] [url=https://fildena.xyz/]fildena 50[/url] [url=https://cytotec.cfd/]cytotec buy[/url]
MarkCounk · August 20, 2022 at 6:07 am
[url=https://albendazole.run/]albendazole albenza[/url]
MichaelDwego · August 20, 2022 at 6:08 am
[url=https://hydroxychloroquine.stream/]hydroxychloroquine 300 mg tablet[/url]
RodneyTab · August 20, 2022 at 6:11 am
[url=http://anafranil.xyz/]25 mg anafranil online[/url]
WimCounk · August 20, 2022 at 6:17 am
[url=http://isotretinoinaccutane.quest/]accutane 2019[/url]
ElwoodGon · August 20, 2022 at 6:22 am
[url=https://atarax.fun/]atarax 25mg prescription[/url]
RicIsose · August 20, 2022 at 6:42 am
[url=https://strattera.fun/]strattera pills online[/url] [url=https://albenza.site/]albendazole buy online india[/url] [url=https://vermox.site/]how much is vermox[/url] [url=https://malegra.site/]malegra dxt without prescription[/url] [url=https://provigil.xyz/]modafinil in south africa[/url] [url=https://antabuse.fun/]buy antabuse in uk[/url] [url=https://hydroxychloroquine.stream/]plaquenil brand name[/url] [url=https://nexium.guru/]nexium cheap price[/url]
SueCounk · August 20, 2022 at 6:47 am
[url=http://hydrochlorothiazide.site/]generic hydrochlorothiazide 25 mg[/url]
AshCounk · August 20, 2022 at 6:51 am
[url=https://erythromycin.store/]erythromycin 500[/url] [url=https://gabapentin.email/]buy cheap neurontin[/url] [url=https://lipitortab.com/]lipitor price[/url] [url=https://tenormin.works/]atenolol 25 mg tablet[/url] [url=https://fildena.guru/]fildena 50 mg[/url] [url=https://propecia.boutique/]cheap propecia[/url]
DenCounk · August 20, 2022 at 7:12 am
[url=http://fildena.xyz/]fildena 100mg[/url]
EyeCounk · August 20, 2022 at 7:17 am
[url=http://tadacip.site/]buy tadacip canada[/url] [url=http://zoloft.fun/]zoloft 125 mg[/url]
CarlCounk · August 20, 2022 at 7:26 am
[url=https://wellbutrin.life/]wellbutrin online india[/url]
RicIsose · August 20, 2022 at 7:26 am
[url=https://albendazole.xyz/]albenza pinworms[/url] [url=https://elimite.cfd/]permethrin cream[/url] [url=https://cleocin.fun/]order clindamycin online[/url] [url=https://prednisone.date/]prednisone tablets 2.5 mg[/url] [url=https://prednisolone.run/]prednisolone for sale online uk[/url] [url=https://prednisolone.boutique/]prednisolone 5mg tablet price[/url] [url=https://viagrautab.monster/]can i buy viagra online in canada[/url]
MiaCounk · August 20, 2022 at 7:27 am
[url=http://acyclovir.sbs/]how to get acyclovir prescription[/url]
CarlCounk · August 20, 2022 at 7:28 am
[url=https://tretinoin.fun/]retin a buy[/url]
Edgarlor · August 20, 2022 at 7:30 am
[url=http://prednisolone.run/]prednisolone 20 mg brand name[/url]
MichaelDwego · August 20, 2022 at 7:38 am
[url=https://vardenafil.men/]levitra 10 mg cost[/url]
ElwoodGon · August 20, 2022 at 7:44 am
[url=https://atarax.fun/]12.5 mg atarax[/url]
JudyCounk · August 20, 2022 at 7:51 am
[url=https://prazosin.xyz/]prazosin 5 mg 1mg[/url]
DenCounk · August 20, 2022 at 8:01 am
[url=http://strattera.life/]strattera brand name coupon[/url]
DavisMug · August 20, 2022 at 8:10 am
[url=http://celebrex.fun/]celebrex 100mg[/url]
JaneCounk · August 20, 2022 at 8:24 am
[url=http://chloroquine.boutique/]buy chloroquine online canada[/url]
RichardFaply · August 20, 2022 at 8:33 am
[url=http://cleocin.fun/]buy cleocin gel online[/url] [url=http://zoloft.click/]400 mg zoloft[/url]
AnnaCounk · August 20, 2022 at 8:34 am
[url=http://azithromycin.sbs/]best azithromycin tablet[/url]
JimCounk · August 20, 2022 at 8:44 am
[url=https://promethazine.site/]phenergan tablets[/url]
SamCounk · August 20, 2022 at 8:57 am
[url=http://effexor.fun/]effexor 75[/url] [url=http://fluconazole.xyz/]diflucan without a prescription[/url]
Jameseloro · August 20, 2022 at 9:21 am
[url=http://advair.fun/]advair diskus price comparison[/url] [url=http://celebrex.fun/]buy celebrex from canada[/url] [url=http://atarax.fun/]atarax tablets uk[/url] [url=http://prednisone.date/]how to buy prednisone without a prescription[/url] [url=http://ciprofloxacin.site/]cipro 55 for sale[/url]
Samuelraisk · August 20, 2022 at 9:32 am
[url=http://tizanidine.site/]zanaflex otc[/url]
JosephMaict · August 20, 2022 at 9:35 am
[url=http://cialisvtab.monster/]can i order cialis online[/url] [url=http://clopidogrel.xyz/]buy clopidogrel[/url] [url=http://advair.fun/]advair over the counter[/url]
MarkCounk · August 20, 2022 at 9:43 am
[url=https://drugstore.fun/]online pharmacy no presc uk[/url]
AnnaCounk · August 20, 2022 at 10:04 am
[url=http://motilium.site/]order motilium online[/url]
PaulCounk · August 20, 2022 at 10:05 am
[url=https://motilium.site/]motilium 10 uk[/url]
Jameseloro · August 20, 2022 at 10:16 am
[url=http://propranolol.site/]otc propranolol[/url] [url=http://hydroxychloroquine.stream/]plaquenil 100mg[/url] [url=http://erectafil.site/]erectafil 10 mg[/url] [url=http://lopressor.site/]lopressor 20mg[/url] [url=http://baclofen.fun/]lioresal 20 mg[/url] [url=http://baclofen.business/]baclofen buy uk[/url] [url=http://tetracycline.fun/]tetracycline 1000[/url]
YonCounk · August 20, 2022 at 10:20 am
[url=https://plavix.cfd/]clopidogrel 75 mg coupon[/url]
CarlCounk · August 20, 2022 at 10:23 am
[url=https://paxil.click/]paxil 20 mg[/url]
NickCounk · August 20, 2022 at 10:35 am
[url=http://hydroxychloroquine.sbs/]plaquenil 600 mg[/url]
RodneyTab · August 20, 2022 at 10:39 am
[url=http://vermox.site/]vermox pharmacy[/url]
Estebanguall · August 20, 2022 at 10:44 am
[url=http://clopidogrel.xyz/]plavix generic price[/url]
MichaelDwego · August 20, 2022 at 10:56 am
[url=https://lyrica.icu/]lyrica canada cost[/url]
UgoCounk · August 20, 2022 at 11:02 am
[url=http://buysuhagra.shop/]suhagra 100 buy online[/url]
Jameseloro · August 20, 2022 at 11:27 am
[url=http://lyrica.icu/]lyrica price in canada[/url] [url=http://vardenafil.men/]buy vardenafil cheap[/url] [url=http://dexamethasone.cfd/]dexamethasone generic brand[/url]
DenCounk · August 20, 2022 at 11:43 am
[url=http://paxil.click/]buy paroxetine online[/url]
Charlesaduse · August 20, 2022 at 11:49 am
[url=http://zoloft.business/]700mg zoloft[/url]
MiaCounk · August 20, 2022 at 11:49 am
[url=http://femaleviagra.cfd/]viagra cheapest prices[/url]
JosephMaict · August 20, 2022 at 11:58 am
[url=http://viagrautab.monster/]pfizer viagra online[/url] [url=http://prednisone.date/]prednisone pharmacy[/url] [url=http://cleocin.fun/]cleocin 2[/url]
PaulCounk · August 20, 2022 at 12:00 pm
[url=https://hydrochlorothiazide.fun/]hydrochlorothiazide 25 mg buy online[/url]
AnnaCounk · August 20, 2022 at 12:11 pm
[url=http://hydroxychloroquine.sbs/]hydroxychloroquine sulfate price[/url]
Jameseloro · August 20, 2022 at 12:17 pm
[url=http://escitalopram.fun/]lexapro medicine[/url] [url=http://prednisone.date/]prednisone 40 mg tablet[/url] [url=http://albenza.site/]albendazole online purchase[/url]
DarrylSef · August 20, 2022 at 12:18 pm
[url=https://cleocin.fun/]cost of cleocin 100 mg[/url] [url=https://ciprofloxacin.site/]ciprofloxacin online[/url]
Michaelemult · August 20, 2022 at 12:31 pm
[url=http://nexium.guru/]nexium prices us[/url]
JackCounk · August 20, 2022 at 12:36 pm
[url=https://hydrochlorothiazide.fun/]hydrochlorothiazide 25 mg tablets[/url]
TimothyThive · August 20, 2022 at 12:38 pm
[url=http://viagrautab.monster/]best price for sildenafil 100 mg[/url]
LisaCounk · August 20, 2022 at 12:40 pm
[url=https://flagyl.fun/]flagyl generic price[/url]
Edgarlor · August 20, 2022 at 12:47 pm
[url=http://amoxicillin.business/]can i buy amoxicillin over the counter in south africa[/url]
RodneyTab · August 20, 2022 at 12:52 pm
[url=http://buspar.site/]buy buspar online cheap[/url]
WimCounk · August 20, 2022 at 12:53 pm
[url=http://amoxicillin.email/]amoxicillin 375 mg[/url]
SueCounk · August 20, 2022 at 12:55 pm
[url=http://promethazine.cfd/]phenergan generic cost[/url]
Samuelraisk · August 20, 2022 at 1:21 pm
[url=http://buspar.site/]buspar online canada[/url]
TeoCounk · August 20, 2022 at 1:21 pm
[url=https://hydrochlorothiazide.fun/]zestoretic canada[/url]
EvaCounk · August 20, 2022 at 1:22 pm
[url=http://trazodone.loan/]trazodone 100mg brand name[/url]
DenCounk · August 20, 2022 at 1:25 pm
[url=http://acyclovir.sbs/]acyclovir for sale uk[/url]
SueCounk · August 20, 2022 at 1:56 pm
[url=http://aurogra.xyz/]aurogra 100 mg[/url]
CarlCounk · August 20, 2022 at 2:27 pm
[url=https://tadacip.site/]tadacip from india[/url]
DavisMug · August 20, 2022 at 2:31 pm
[url=http://zoloft.click/]zoloft 100mg price[/url]
SueCounk · August 20, 2022 at 2:31 pm
[url=http://bactrim.sbs/]bactrim prices[/url]
ElwoodGon · August 20, 2022 at 2:32 pm
[url=https://valtrex.click/]buy real valtrex online[/url]
KiaCounk · August 20, 2022 at 3:01 pm
[url=http://tadalafil.moscow/]daily cialis online[/url]
ElwoodGon · August 20, 2022 at 3:13 pm
[url=https://prednisolone.run/]prednisolone acetate[/url]
MarkCounk · August 20, 2022 at 3:25 pm
[url=https://trental.cfd/]buy trental online[/url]
BooCounk · August 20, 2022 at 3:31 pm
[url=https://lyrica.monster/]lyrica for sale uk[/url]
JackCounk · August 20, 2022 at 3:32 pm
[url=https://fluconazole.xyz/]diflucan australia[/url]
AshCounk · August 20, 2022 at 3:37 pm
[url=https://buyretina.monster/]retin-a online[/url] [url=https://cafergot.guru/]cafergot uk[/url] [url=https://augmentin.cfd/]amoxicillin coupon[/url] [url=https://lasix.store/]buy laxis with mastercard[/url] [url=https://avodart5.com/]avodart 5[/url] [url=https://nolvadex.cfd/]nolvadex online buy[/url] [url=https://norxorder.com/]lexapro price usa[/url] [url=https://hydroxychloroquiene.com/]hydroxychloroquine 700 mg[/url]
MiclTek · August 20, 2022 at 3:38 pm
[url=https://strattera.fun/]strattera 40 mg[/url]
IvyCounk · August 20, 2022 at 4:04 pm
[url=http://mebendazole.site/]vermox uk online[/url] [url=http://albuterol.fun/]ventolin canada[/url]
RodneyTab · August 20, 2022 at 4:14 pm
[url=http://baclofen.fun/]baclofen 4097[/url]
RicIsose · August 20, 2022 at 4:32 pm
[url=https://prednisone.network/]cheapest prednisone no prescription[/url] [url=https://suhagra.fun/]suhagra tablet 50 mg[/url] [url=https://trental.xyz/]trental 400 price[/url] [url=https://albenza.business/]albenza tab 200mg[/url]
SueCounk · August 20, 2022 at 4:33 pm
[url=http://lisinopril.site/]lisinopril online purchase[/url]
TommyHepsy · August 20, 2022 at 4:35 pm
[url=https://trazodone.fun/]buy trazodone online usa[/url]
DenCounk · August 20, 2022 at 4:43 pm
[url=http://motrin.site/]can you buy motrin over the counter[/url]
Michaelemult · August 20, 2022 at 4:52 pm
[url=https://prednisone.network/]prednisone cost in india[/url]
RichardFaply · August 20, 2022 at 5:05 pm
[url=http://diflucan.xyz/]diflucan otc in canada[/url] [url=http://azithromycin.media/]buy azithromycin online no prescription[/url] [url=http://sildenafil.site/]sildenafil 100mg price uk[/url] [url=http://hydroxychloroquine.ink/]plaquenil online[/url] [url=http://flagyl.site/]flagyl 500 mg tablets[/url] [url=http://prednisone.network/]prednisone pills[/url]
DavisMug · August 20, 2022 at 5:06 pm
[url=http://budesonide.run/]budesonide 9 mg price[/url]
Michaeldrist · August 20, 2022 at 5:10 pm
[url=http://inderal.site/]buy propranolol 80 mg[/url]
MichaelDwego · August 20, 2022 at 5:12 pm
[url=https://estrace.fun/]estrace pills cost[/url]
BooCounk · August 20, 2022 at 5:15 pm
[url=https://cholesterolrem.com/]crestor 10 mg tablets[/url]
PaulCounk · August 20, 2022 at 5:18 pm
[url=https://levofloxacin.site/]levaquin without prescription[/url]
EvaCounk · August 20, 2022 at 5:39 pm
[url=https://modafinil.durban/]provigil online uk[/url]
SueCounk · August 20, 2022 at 5:39 pm
[url=http://lasix.wtf/]buy lasix 40 mg[/url]
BooCounk · August 20, 2022 at 6:11 pm
[url=https://antabuse.directory/]where to get antabuse[/url]
IvyCounk · August 20, 2022 at 6:17 pm
[url=http://lasix.wtf/]lasix medicine 20 mg[/url] [url=http://malegra.fun/]malegra 100 tablet[/url] [url=http://viagraotabs.quest/]female viagra pills price[/url] [url=http://modafinil.durban/]buy modafinil online usa[/url]
TimothyThive · August 20, 2022 at 6:27 pm
[url=http://augmentin.business/]amoxicillin 5[/url]
PaulCounk · August 20, 2022 at 6:30 pm
[url=https://motrin.site/]motrin over the counter drug[/url]
PaulCounk · August 20, 2022 at 6:39 pm
[url=https://budesonide.site/]budesonide online[/url]
TimothyThive · August 20, 2022 at 6:59 pm
[url=http://tamoxifen.fun/]nolvadex tablets[/url]
YonCounk · August 20, 2022 at 6:59 pm
[url=http://propecia.capetown/]best price for generic propecia[/url]
Davidhup · August 20, 2022 at 7:03 pm
[url=https://allopurinol.xyz/]medicine allopurinol 100[/url]
RicIsose · August 20, 2022 at 7:05 pm
[url=https://budesonide.run/]budesonide 3mg capsules[/url] [url=https://trazodone.fun/]buy trazodone online india[/url]
MiclTek · August 20, 2022 at 7:18 pm
[url=http://suhagra.fun/]suhagra 50 mg tablet online purchase[/url]
AmyCounk · August 20, 2022 at 7:19 pm
[url=https://diflucan.sbs/]diflucan capsule price[/url]
AlanCounk · August 20, 2022 at 7:26 pm
[url=https://sildalis.click/]buy sildalis 120 mg[/url] [url=https://zestoretic.fun/]zestoretic 5 mg[/url] [url=https://orlistat.life/]xenical pills online[/url] [url=https://orlistat.fun/]xenical tablets for sale[/url] [url=https://viagravtabs.monster/]buy sildenafil tablets 100mg[/url] [url=https://doxycycline.network/]doxycycline 50mg tablets[/url] [url=https://lisinopril.site/]lisinopril 20 25 mg tab[/url] [url=https://modafinil.run/]provigil in canada[/url]
Charlesaduse · August 20, 2022 at 7:27 pm
[url=http://hydroxychloroquine.makeup/]hydroxychloroquine sulfate 300 mg[/url]
Michaelemult · August 20, 2022 at 7:40 pm
[url=https://fildena.fun/]buy fildena 100mg[/url]
EyeCounk · August 20, 2022 at 7:47 pm
[url=http://lisinopril.click/]zestril 5 mg tablet[/url] [url=http://doxycycline.network/]where to buy doxycycline online[/url] [url=http://nexium.cfd/]nexium medication cost[/url] [url=http://zovirax.fun/]zovirax 200 buy[/url] [url=http://budesonide.site/]budesonide 6 mg[/url] [url=http://propecia.capetown/]propecia for sale online[/url] [url=http://dutasteride.fun/]avodart online paypal[/url]
JoeCounk · August 20, 2022 at 7:51 pm
[url=https://modafinil.durban/]how to purchase provigil[/url] [url=https://lasix.wtf/]lasix 250 mg tablet[/url] [url=https://levofloxacin.site/]levaquin 500[/url] [url=https://viagra.monster/]get viagra online[/url] [url=https://accutane.wtf/]accutane 1mg[/url] [url=https://sildalis.fun/]sildalis tablets[/url] [url=https://doxycycline.network/]doxycycline no prescription[/url] [url=https://lisinopril.click/]zestril 5 mg prices[/url]
YonCounk · August 20, 2022 at 7:59 pm
[url=http://clopidogrel.site/]cost of plavix in canada[/url]
AnnaCounk · August 20, 2022 at 8:10 pm
[url=https://hydroxychloroquine.business/]hydroxychloroquine sulfate[/url]
Michaelemult · August 20, 2022 at 8:13 pm
[url=https://trazodone.icu/]23629 desyrel[/url]
EvaCounk · August 20, 2022 at 8:17 pm
[url=https://clopidogrel.site/]clopidogrel 34[/url]
ElwoodGon · August 20, 2022 at 8:18 pm
[url=http://cephalexin.icu/]cephalexin tablet price[/url]
IvyCounk · August 20, 2022 at 8:27 pm
[url=http://sildalis.fun/]sildalis 120 mg order usa pharmacy[/url] [url=http://dutasteride.fun/]cost avodart[/url] [url=http://hydroxychloroquine.business/]plaquenil price australia[/url] [url=http://fluoxetine.life/]prozac capsules 30 mg[/url]
MarkCounk · August 20, 2022 at 8:36 pm
[url=https://orlistat.fun/]orlistat 120 mg buy online[/url]
MichaelGuabe · August 20, 2022 at 8:53 pm
[url=http://hydroxyzine.fun/]atarax medicine[/url]
Charlesaduse · August 20, 2022 at 8:53 pm
[url=http://hydrochlorothiazide.cfd/]zestoretic generic[/url]
JudyCounk · August 20, 2022 at 8:57 pm
[url=https://hydroxychloroquine.business/]hydroxychloroquine 500 mg[/url]
ElwoodGon · August 20, 2022 at 9:01 pm
[url=http://augmentin.business/]amoxicillin 25mg[/url]
RodneyTab · August 20, 2022 at 9:01 pm
[url=http://avana.click/]dapoxetine online pharmacy[/url]
WilliamWem · August 20, 2022 at 9:02 pm
[url=https://cialiswtab.quest/]generic tadalafil 2018[/url] [url=https://flagyl.site/]buy flagyl online no prescription[/url] [url=https://sildenafil.site/]viagra 25mg online india[/url]
WilliamWem · August 20, 2022 at 9:03 pm
[url=https://suhagra.fun/]suhagra 50 mg tablet online purchase[/url] [url=https://antabuse.site/]disulfiram tablets online[/url] [url=https://provigil.life/]modafinil for sale[/url] [url=https://levothyroxine.xyz/]synthroid brand name in india[/url]
RichardFaply · August 20, 2022 at 9:18 pm
[url=http://onlinepharmacy.media/]best pharmacy[/url] [url=http://prozac.media/]buy generic prozac[/url] [url=http://proscar.site/]how to get propecia in canada[/url] [url=http://yasmin.monster/]buy yasmin pill online usa[/url] [url=http://hydroxyzine.fun/]buy atarax australia[/url] [url=http://tamoxifen.fun/]where can i buy nolvadex online[/url] [url=http://allopurinol.xyz/]allopurinol in usa[/url] [url=http://flagyl.site/]buy flagyl no prescription[/url]
Samuelraisk · August 20, 2022 at 9:24 pm
[url=https://sildenafil.site/]buy generic viagra soft tabs[/url]
YonCounk · August 20, 2022 at 9:25 pm
[url=http://methocarbamol.site/]robaxin 750 tablet[/url]
MiclTek · August 20, 2022 at 9:26 pm
[url=http://trental.xyz/]how to get trental pill[/url]
TommyHepsy · August 20, 2022 at 9:28 pm
[url=https://hydrochlorothiazide.cfd/]losartan hydrochlorothiazide[/url]
MiclTek · August 20, 2022 at 9:30 pm
[url=http://trental.xyz/]trental 100 mg tablets[/url]
AlanCounk · August 20, 2022 at 9:30 pm
[url=https://malegra.fun/]buy malegra 50[/url] [url=https://onlinepharmacy.run/]canadien pharmacies[/url] [url=https://modafinil.durban/]modafinil online[/url] [url=https://accutane.click/]compare accutane prices[/url] [url=https://valacyclovir.site/]valtrex generic price[/url]
JudyCounk · August 20, 2022 at 9:31 pm
[url=https://sildalis.click/]sildalis 120[/url]
Davidhup · August 20, 2022 at 9:31 pm
[url=https://inderal.site/]inderal[/url]
JudyCounk · August 20, 2022 at 9:41 pm
[url=https://orlistat.fun/]purchase orlistat[/url]
JoeCounk · August 20, 2022 at 9:50 pm
[url=https://valacyclovir.site/]buy generic valtrex[/url] [url=https://diflucan.sbs/]diflucan 150 mg price[/url] [url=https://hydroxychloroquine.business/]hydroxychloroquine sulfate tabs[/url]
JimCounk · August 20, 2022 at 9:54 pm
[url=https://cymbalta.site/]cymbalta prescription cost[/url]
WilliamWem · August 20, 2022 at 10:00 pm
[url=https://inderal.site/]propranolol 40 mg tablet price[/url] [url=https://dapoxetine.fun/]dapoxetine mexico[/url] [url=https://levothyroxine.fun/]synthroid 88[/url] [url=https://sildenafil.site/]cheapest sildenafil 100 mg uk[/url] [url=https://seroquel.fun/]seroquel 100 mg coupon[/url] [url=https://prozac.media/]prozac 60[/url] [url=https://cialiswtab.quest/]5mg tadalafil online[/url]
TommyHepsy · August 20, 2022 at 10:04 pm
[url=https://glucophage.site/]metformin 20 mg[/url]
JosephMaict · August 20, 2022 at 10:06 pm
[url=http://proscar.site/]propecia .5 mg[/url] [url=http://cephalexin.icu/]cephalexin 750 mg capsule[/url] [url=http://levothyroxine.xyz/]synthroid lowest prices[/url] [url=http://azithromycin.media/]zithromax prescription cost[/url] [url=http://trental.xyz/]buy trental online[/url]
Charlesaduse · August 20, 2022 at 10:11 pm
[url=http://glucophage.icu/]buy glucophage[/url]
Jameseloro · August 20, 2022 at 10:14 pm
[url=https://cialiswtab.quest/]10mg cialis cost[/url] [url=https://vardenafil.network/]levitra online from india[/url]
JasonCounk · August 20, 2022 at 10:17 pm
[url=http://propecia.capetown/]finesterude no prescription[/url]
AmyCounk · August 20, 2022 at 10:27 pm
[url=https://sildalis.fun/]sildalis 120 mg[/url]
MiclTek · August 20, 2022 at 10:37 pm
[url=http://proscar.site/]proscar generic buy[/url]
AmyCounk · August 20, 2022 at 10:52 pm
[url=https://fluoxetine.life/]fluoxetine 10 mg capsules[/url]
Edgarlor · August 20, 2022 at 11:00 pm
[url=http://glucophage.icu/]glucophage 1000 mg tablet[/url]
RichardFaply · August 20, 2022 at 11:05 pm
[url=http://vermox.fun/]vermox canada cost[/url] [url=http://prozac.media/]fluoxetine generic 200 mg[/url] [url=http://levothyroxine.fun/]synthroid 400 mg[/url] [url=http://suhagra.fun/]suhagra 100mg best price[/url] [url=http://antabuse.site/]antabuse pills for sale[/url] [url=http://flagyl.site/]buy generic flagyl online[/url] [url=http://tamoxifen.fun/]can you buy nolvadex over the counter[/url]
RicIsose · August 20, 2022 at 11:09 pm
[url=https://hydroxychloroquine.ink/]hydroxychloroquine[/url] [url=https://levothyroxine.xyz/]synthroid online prices[/url] [url=https://seroquel.site/]seroquel price in india[/url] [url=https://dapoxetine.fun/]dapoxetine 60mg[/url] [url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide tabs 12.5 mg[/url] [url=https://onlinepharmacy.download/]online pharmacy drop shipping[/url]
Curtisvibia · August 20, 2022 at 11:11 pm
[url=https://inderal.site/]propranolol discount[/url]
ZakCounk · August 20, 2022 at 11:13 pm
[url=http://dexamethasone.site/]dexamethasone tablet online[/url] [url=http://valacyclovir.site/]valtrex generic in mexico[/url] [url=http://modafinil.durban/]cost of modafinil 200mg[/url] [url=http://accutane.click/]buy accutane australia[/url] [url=http://lisinopril.site/]lisinopril 30 mg[/url] [url=http://viagrahtabs.quest/]where can you buy viagra over the counter in australia[/url] [url=http://orlistat.life/]buy xenical online australia[/url] [url=http://mebendazole.site/]where can i buy vermox medication online[/url]
MiclTek · August 20, 2022 at 11:15 pm
[url=http://yasmin.monster/]yasmin 2004[/url]
IvyCounk · August 20, 2022 at 11:20 pm
[url=http://viagrahtabs.quest/]cheap female viagra pills[/url] [url=http://tadacip.xyz/]tadacip 10 mg[/url] [url=http://valtrex.fun/]online drugs valtrex[/url] [url=http://celexa.cfd/]celexa medication[/url] [url=http://dutasteride.fun/]avodart soft capsules[/url] [url=http://cymbalta.site/]cymbalta 30 mg buy online[/url] [url=http://atomoxetine.sbs/]straterra order[/url] [url=http://levitra.sbs/]can you buy levitra over the counter in canada[/url]
ElwoodGon · August 20, 2022 at 11:32 pm
[url=http://antabuse.site/]order antabuse[/url]
UgoCounk · August 20, 2022 at 11:41 pm
[url=http://buyzanaflex.shop/]zanaflex for migraines[/url]
DavisMug · August 20, 2022 at 11:42 pm
[url=http://yasmin.monster/]yasmin online purchase[/url]
WimCounk · August 20, 2022 at 11:42 pm
[url=http://cipro.agency/]cipro canada[/url]
Estebanguall · August 20, 2022 at 11:44 pm
[url=https://kamagra.fun/]kamagra jelly 100mg india[/url]
AlanCounk · August 21, 2022 at 12:01 am
[url=https://accutane.wtf/]buy accutane online canada[/url] [url=https://accutane.click/]buy cheap accutane[/url] [url=https://ampicillin.site/]ampicillin for sale[/url] [url=https://sildalis.click/]sildalis[/url]
TimothyThive · August 21, 2022 at 12:07 am
[url=http://kamagra.fun/]kamagra 100mg oral jelly ajanta pharma[/url]
IvyCounk · August 21, 2022 at 12:19 am
[url=http://nexium.cfd/]nexium 20mg prescription[/url] [url=http://valtrex.fun/]how to get valtrex in mexico[/url] [url=http://dexamethasone.site/]dexona 10 tablet price[/url] [url=http://accutane.click/]generic accutane online pharmacy[/url] [url=http://lisinopril.click/]lisinopril 40 mg pill[/url] [url=http://ampicillin.site/]ampicillin 500mg price in india[/url] [url=http://dutasteride.fun/]avodart 0.5 mg tab[/url]
Jameseloro · August 21, 2022 at 12:26 am
[url=https://levothyroxine.xyz/]buy synthroid online uk[/url] [url=https://budesonide.run/]budesonide australia[/url] [url=https://allopurinol.xyz/]allopurinol 135[/url] [url=https://prozac.media/]buy prozac online nz[/url]
TimothyThive · August 21, 2022 at 12:48 am
[url=http://finasteride.site/]generic propecia 1mg[/url]
YonCounk · August 21, 2022 at 12:50 am
[url=http://dexamethasone.site/]dexamethasone 2mg tablets price[/url]
Edgarlor · August 21, 2022 at 12:55 am
[url=http://sildenafil.site/]cheap viagra pills usa[/url]
AshCounk · August 21, 2022 at 12:56 am
[url=https://tizanidine.digital/]tizanidine price[/url] [url=https://lipitortab.com/]generic lipitor online[/url] [url=https://methocarbamol.shop/]robaxin for sale[/url] [url=https://buyprednisone.boutique/]prednisone pill prices[/url] [url=https://finasteride.boutique/]order propecia online cheap[/url] [url=https://seroquel.works/]seroquel 350 mg[/url] [url=https://avodart2.com/]avodart online[/url]
ZakCounk · August 21, 2022 at 1:00 am
[url=http://accutane.wtf/]accutane[/url] [url=http://ventolin.click/]ventolin cost canada[/url] [url=http://tadacip.xyz/]where to buy tadacip 20[/url] [url=http://clopidogrel.site/]can i buy plavix over the counter[/url]
MarkCounk · August 21, 2022 at 1:03 am
[url=https://ventolin.click/]albuterol online[/url]
SueCounk · August 21, 2022 at 1:06 am
[url=http://viagra.monster/]viagra 100mg uk price[/url]
ElwoodGon · August 21, 2022 at 1:07 am
[url=http://augmentin.business/]amoxicillin cheapest price[/url]
RichardFaply · August 21, 2022 at 1:08 am
[url=http://seroquel.site/]seroquel for children[/url] [url=http://flagyl.site/]flagyl online without prescription[/url] [url=http://albenza.icu/]where to get albendazole[/url] [url=http://albenza.business/]where to order albendazole[/url]
JasonCounk · August 21, 2022 at 1:30 am
[url=http://zestoretic.fun/]zestoretic generic[/url]
DarrylSef · August 21, 2022 at 1:30 am
[url=http://levothyroxine.fun/]synthroid price[/url] [url=http://trazodone.icu/]trazodone 100mg australia[/url] [url=http://onlinepharmacy.win/]pharmacy shop[/url] [url=http://glucophage.site/]metformin 500 price[/url]
Charlesaduse · August 21, 2022 at 1:33 am
[url=http://onlinepharmacy.download/]rx pharmacy no prescription[/url]
UgoCounk · August 21, 2022 at 1:38 am
[url=http://allopurinol.agency/]allopurinol 600 mg[/url]
TommyHepsy · August 21, 2022 at 1:47 am
[url=https://drugstore.today/]canadian pharmacy 24h com safe[/url]
RicIsose · August 21, 2022 at 1:50 am
[url=https://hydroxychloroquine.makeup/]quineprox[/url] [url=https://augmentin.business/]buy augmentin uk[/url] [url=https://kamagra.fun/]kamagra 100 tablets[/url] [url=https://onlinepharmacy.media/]pharmacy in canada for viagra[/url] [url=https://levothyroxine.fun/]cost of synthroid 75 mcg[/url] [url=https://glucophage.icu/]metformin 850 mg price[/url] [url=https://cephalexin.icu/]buy keflex online[/url]
JimCounk · August 21, 2022 at 1:52 am
[url=https://cialiswtabs.monster/]where to buy generic cialis[/url]
AlanCounk · August 21, 2022 at 1:53 am
[url=https://albuterol.fun/]1.25 mg albuterol[/url] [url=https://viagravtabs.monster/]viagra online cheap india[/url] [url=https://modafinil.durban/]modafinil online pharmacy usa[/url] [url=https://modafinil.run/]provigil price in india[/url] [url=https://accutane.wtf/]buy accutane online india[/url] [url=https://nexium.cfd/]can i buy nexium over the counter in uk[/url] [url=https://accutane.click/]buy accutane online cheap[/url]
MiaCounk · August 21, 2022 at 2:05 am
[url=http://accutane.click/]buy accutane online 30mg[/url]
MarkCounk · August 21, 2022 at 2:05 am
[url=https://valacyclovir.site/]generic for valtrex buy without a prescription[/url]
Curtisvibia · August 21, 2022 at 2:08 am
[url=https://glucophage.site/]metformin how to get[/url]
CarlCounk · August 21, 2022 at 2:10 am
[url=https://diflucan.sbs/]buy diflucan for yeast infection[/url]
Michaeldrist · August 21, 2022 at 2:10 am
[url=http://allopurinol.xyz/]where to buy allopurinol tablets[/url]
ZakCounk · August 21, 2022 at 2:14 am
[url=http://sildalis.click/]sildalis online[/url] [url=http://malegra.fun/]malegra dxt tablets[/url] [url=http://zovirax.fun/]how much is acyclovir pills[/url]
RodneyTab · August 21, 2022 at 2:17 am
[url=http://finasteride.site/]buying propecia online[/url]
DenCounk · August 21, 2022 at 2:23 am
[url=http://modafinil.durban/]modafinil pharmacy online[/url]
UgoCounk · August 21, 2022 at 2:24 am
[url=http://cialisctab.monster/]best price cialis online[/url]
IvyCounk · August 21, 2022 at 2:24 am
[url=http://levofloxacin.site/]ebaylevaquin[/url] [url=http://valacyclovir.site/]purchase generic valtrex online[/url] [url=http://doxycycline.network/]buy doxycycline no prescription[/url] [url=http://sildalis.click/]buy sildalis 120 mg[/url] [url=http://malegra.fun/]malegra pills[/url] [url=http://fluoxetine.life/]buy generic fluoxetine[/url] [url=http://viagraotabs.quest/]viagra 75 mg[/url]
TimothyThive · August 21, 2022 at 2:45 am
[url=http://seroquel.site/]seroquel 25 pill[/url]
MarvinZem · August 21, 2022 at 2:46 am
[url=https://seroquel.site/]300mg seroquel[/url]
KiaCounk · August 21, 2022 at 2:57 am
[url=http://dexamethasone.site/]dexamethasone 1.5 mg tablet[/url]
JosephMaict · August 21, 2022 at 3:23 am
[url=http://tamoxifen.fun/]tamoxifen 20 mg tablet[/url] [url=http://levothyroxine.fun/]synthroid without a rx[/url] [url=http://allopurinol.icu/]buy allopurinol 300[/url] [url=http://antabuse.site/]antabuse uk prescription[/url]
WimCounk · August 21, 2022 at 3:36 am
[url=http://escitalopram.online/]lexapro 40 mg daily[/url]
LisaCounk · August 21, 2022 at 3:43 am
[url=https://viagrahtabs.quest/]cost of generic viagra[/url]
Edgarlor · August 21, 2022 at 3:58 am
[url=http://tamoxifen.fun/]nolvadex tab 20mg[/url]
Curtisvibia · August 21, 2022 at 4:10 am
[url=https://antabuse.site/]buy disulfiram tablets[/url]
TommyHepsy · August 21, 2022 at 4:13 am
[url=https://augmentin.business/]rx augmentin[/url]
Samuelraisk · August 21, 2022 at 4:20 am
[url=https://cephalexin.icu/]cephalexin 500 mg[/url]
Estebanguall · August 21, 2022 at 4:26 am
[url=https://hydroxyzine.fun/]atarax 25 mg tablet price[/url]
IvyCounk · August 21, 2022 at 4:31 am
[url=http://orlistat.fun/]orlistat over the counter price[/url] [url=http://cialiswtabs.monster/]tadalafil uk over the counter[/url] [url=http://albuterol.fun/]ventolin 250 mcg[/url] [url=http://malegra.fun/]malegra 100 tablet[/url] [url=http://lisinopril.click/]lisinopril 20 mg india[/url]
WilliamWem · August 21, 2022 at 4:34 am
[url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 25 mg cost[/url] [url=https://prednisolone.fun/]prednisolone prices[/url] [url=https://fildena.fun/]where to buy fildena[/url] [url=https://onlinepharmacy.win/]online pharmacies that use paypal[/url] [url=https://levothyroxine.xyz/]synthroid 2003[/url] [url=https://tamoxifen.fun/]where to get tamoxifen[/url] [url=https://onlinepharmacy.download/]pharmacy shop[/url] [url=https://vermox.fun/]buy vermox[/url]
KiaCounk · August 21, 2022 at 4:37 am
[url=http://levofloxacin.life/]levaquin medication[/url]
JackCounk · August 21, 2022 at 4:39 am
[url=https://ampicillin.site/]ampicillin brand name in india[/url]
EvaCounk · August 21, 2022 at 4:39 am
[url=https://accutane.wtf/]accutane rx[/url]
AnnaCounk · August 21, 2022 at 4:40 am
[url=https://valtrex.fun/]valtrex 1000 mg tablet[/url]
RobertFoold · August 21, 2022 at 4:47 am
[url=https://trazodone.icu/]trazodone 50mg daily[/url]
ElwoodGon · August 21, 2022 at 4:56 am
[url=http://fildena.fun/]fildena 100 usa[/url]
Samuelraisk · August 21, 2022 at 4:56 am
[url=https://fildena.fun/]fildena tablets[/url]
CarlCounk · August 21, 2022 at 5:03 am
[url=https://viagraotabs.quest/]cheap viagra fast shipping[/url]
JackCounk · August 21, 2022 at 5:07 am
[url=https://doxycycline.network/]doxycycline price compare[/url]
YonCounk · August 21, 2022 at 5:12 am
[url=http://ampicillin.site/]ampicillin antibiotic[/url]
ElwoodGon · August 21, 2022 at 5:15 am
[url=http://azithromycin.media/]azithromycin pills 250 mg[/url]
MichaelGuabe · August 21, 2022 at 5:16 am
[url=http://vermox.fun/]vermox 500g[/url]
MarvinZem · August 21, 2022 at 5:19 am
[url=https://levothyroxine.xyz/]synthroid 100 mcg coupon[/url]
SueCounk · August 21, 2022 at 5:45 am
[url=http://accutane.wtf/]accutane 80 mg daily[/url]
ZakCounk · August 21, 2022 at 5:47 am
[url=http://albuterol.fun/]albuterol inhaler cost[/url] [url=http://lasix.wtf/]furosemide 120 mg daily[/url] [url=http://celexa.cfd/]citalopram 49 mg[/url] [url=http://malegra.fun/]malegra 200[/url]
Edgarlor · August 21, 2022 at 5:59 am
[url=http://seroquel.site/]200 seroquel[/url]
Estebanguall · August 21, 2022 at 6:06 am
[url=https://triamterene.cfd/]triamterene 75 mg[/url]
TeoCounk · August 21, 2022 at 6:07 am
[url=http://sildalis.click/]buy sildalis[/url]
ElwoodGon · August 21, 2022 at 6:09 am
[url=http://prednisone.network/]deltasone drug[/url]
MiclTek · August 21, 2022 at 6:43 am
[url=http://kamagra.fun/]kamagra jelly uk amazon[/url]
RodneyTab · August 21, 2022 at 6:58 am
[url=http://suhagra.fun/]suhagra 100 online buy[/url]
KiaCounk · August 21, 2022 at 7:09 am
[url=http://accutane.wtf/]how can i get accutane online[/url]
RichardFaply · August 21, 2022 at 7:11 am
[url=http://hydrochlorothiazide.cfd/]purchase hydrochlorothiazide online[/url] [url=http://drugstore.today/]online pharmacy discount code 2018[/url] [url=http://seroquel.fun/]1400 mg seroquel[/url] [url=http://kamagra.fun/]can i buy kamagra over the counter in south africa[/url]
DarrylSef · August 21, 2022 at 7:29 am
[url=http://prednisone.network/]prednisone cost canada[/url] [url=http://antabuse.site/]disulfiram brand in india[/url] [url=http://trental.xyz/]trental drug[/url] [url=http://albenza.business/]albendazole how to[/url] [url=http://levothyroxine.fun/]synthroid 135 mcg[/url] [url=http://triamterene.cfd/]triamterene hctz[/url] [url=http://dapoxetine.fun/]dapoxetine brand name india[/url]
AlanCounk · August 21, 2022 at 7:30 am
[url=https://nexium.cfd/]nexium in canada[/url] [url=https://fluoxetine.fun/]fluoxetine 20mg online[/url] [url=https://dexamethasone.site/]dexamethasone 4 mg tablet price[/url] [url=https://zestoretic.fun/]zestoretic medication[/url] [url=https://budesonide.site/]budecort 200[/url] [url=https://piroxicam.fun/]feldene pill[/url] [url=https://albuterol.fun/]cheap ventolin inhalers[/url] [url=https://accutane.wtf/]buy cheap accutane[/url]
RodneyTab · August 21, 2022 at 7:34 am
[url=http://onlinepharmacy.win/]mail order pharmacy india[/url]
IvyCounk · August 21, 2022 at 7:36 am
[url=http://mebendazole.site/]vermox drug[/url] [url=http://albuterol.fun/]where can you buy albuterol[/url] [url=http://ventolin.fun/]how to buy albuterol tabs online without a prescription[/url] [url=http://zovirax.fun/]buying acyclovir[/url]
Samuelraisk · August 21, 2022 at 7:43 am
[url=https://triamterene.cfd/]triamterene 75mg hctz 50mg tablets[/url]
TeoCounk · August 21, 2022 at 8:00 am
[url=http://mebendazole.site/]vermox 100mg price[/url]
Michaelemult · August 21, 2022 at 8:10 am
[url=https://yasmin.monster/]yasmin prescription cost[/url]
PaulCounk · August 21, 2022 at 8:23 am
[url=https://levitra.sbs/]levitra 20mg buy[/url]
DarrylSef · August 21, 2022 at 8:30 am
[url=http://diflucan.xyz/]buy fluconizole online[/url] [url=http://hydroxyzine.fun/]atarax 10 mg tablet[/url] [url=http://albenza.business/]albendazole cost in canada[/url]
JasonCounk · August 21, 2022 at 8:39 am
[url=http://lisinopril.site/]lisinopril 10mg daily[/url]
DarrylSef · August 21, 2022 at 8:45 am
[url=http://finasteride.site/]order propecia online usa[/url] [url=http://albenza.business/]albenza 200[/url] [url=http://glucophage.site/]metformin online buy[/url] [url=http://augmentin.business/]amoxicillin for sale no prescription[/url] [url=http://flagyl.site/]where to buy flagyl[/url] [url=http://vardenafil.network/]buy cheap levitra no prescription[/url]
JaneCounk · August 21, 2022 at 8:47 am
[url=http://albuterol.fun/]generic for ventolin[/url]
DarrylSef · August 21, 2022 at 8:53 am
[url=http://onlinepharmacy.media/]canadian neighbor pharmacy[/url] [url=http://hydroxychloroquine.makeup/]hydroxychloroquine sulfate oval pill[/url] [url=http://prednisolone.fun/]prednisolone 5mg usa[/url] [url=http://seroquel.fun/]seroquel generic 25mg[/url] [url=http://cephalexin.icu/]keflex 500 mg capsule[/url] [url=http://allopurinol.xyz/]allopurinol buy usa[/url]
EvaCounk · August 21, 2022 at 8:59 am
[url=https://tadacip.xyz/]tadacip online[/url]
Samuelraisk · August 21, 2022 at 9:00 am
[url=https://glucophage.icu/]metformin cost mexico[/url]
LisaCounk · August 21, 2022 at 9:01 am
[url=https://sildalis.click/]sildalis india[/url]
Samuelraisk · August 21, 2022 at 9:17 am
[url=https://trental.xyz/]trental tablet[/url]
PaulCounk · August 21, 2022 at 9:25 am
[url=https://diclofenac.fun/]voltaren gel price in india[/url]
EvaCounk · August 21, 2022 at 9:41 am
[url=https://levofloxacin.life/]levaquin medicine[/url]
JackCounk · August 21, 2022 at 9:54 am
[url=https://silagra.site/]silagra tablets[/url]
JudyCounk · August 21, 2022 at 10:03 am
[url=https://dexamethasone.site/]dexamethasone 80 mg[/url]
MichaelDwego · August 21, 2022 at 10:08 am
[url=https://avana.click/]dapoxetine mexico[/url]
IvyCounk · August 21, 2022 at 10:19 am
[url=http://lisinopril.click/]buy lisinopril online canada[/url] [url=http://viagrahtabs.quest/]best viagra online australia[/url] [url=http://diflucan.sbs/]diflucan mexico[/url] [url=http://nexium.cfd/]nexium mexico[/url] [url=http://ventolin.click/]generic ventolin[/url]
MarvinZem · August 21, 2022 at 10:40 am
[url=https://cialiswtab.quest/]tadamen soft 20 mg[/url]
IvyCounk · August 21, 2022 at 10:42 am
[url=http://diclofenac.fun/]buy voltaren gel cheap[/url] [url=http://ventolin.fun/]albuterol 5 mg[/url] [url=http://motrin.site/]motrin prescription 600 mg[/url] [url=http://methocarbamol.site/]robaxin canada[/url] [url=http://doxycycline.network/]buy doxycycline 100mg canada[/url] [url=http://hydroxychloroquine.business/]hydroxychloroquine 1mg[/url]
ElwoodGon · August 21, 2022 at 10:43 am
[url=http://onlinepharmacy.download/]canadian pharmacy in canada[/url]
RobertFoold · August 21, 2022 at 10:49 am
[url=https://finasteride.site/]propecia usa buy[/url]
WimCounk · August 21, 2022 at 10:51 am
[url=http://clopidogrel.shop/]clopidogrel generic cost[/url]
MiaCounk · August 21, 2022 at 10:57 am
[url=http://diclofenac.fun/]diclofenac tablets 75mg[/url]
NickCounk · August 21, 2022 at 11:09 am
[url=https://valacyclovir.site/]valtrex canadian pharmacy[/url]
LisaCounk · August 21, 2022 at 11:14 am
[url=https://ventolin.fun/]cost of ventolin in usa[/url]
ElwoodGon · August 21, 2022 at 11:23 am
[url=http://drugstore.today/]best online pharmacy reddit[/url]
KimCounk · August 21, 2022 at 11:39 am
[url=https://lisinopril.click/]where to buy lisinopril without prescription[/url]
UgoCounk · August 21, 2022 at 11:42 am
[url=http://metforminc.online/]buy metformin online singapore[/url]
Edgarlor · August 21, 2022 at 11:42 am
[url=http://albenza.business/]albenza over the counter[/url]
KimCounk · August 21, 2022 at 11:58 am
[url=https://diflucan.sbs/]diflucan over the counter canada[/url]
YonCounk · August 21, 2022 at 12:02 pm
[url=http://dexamethasone.site/]dexamethasone 40 mg[/url]
Edgarlor · August 21, 2022 at 12:06 pm
[url=http://suhagra.fun/]buy suhagra online[/url]
RobertFoold · August 21, 2022 at 12:17 pm
[url=https://prednisolone.fun/]prednisolone drug[/url]
ElwoodGon · August 21, 2022 at 12:27 pm
[url=http://onlinepharmacy.win/]legal online pharmacy coupon code[/url]
PaulCounk · August 21, 2022 at 12:28 pm
[url=https://viagraotabs.quest/]sildenafil 100mg india[/url]
Samuelraisk · August 21, 2022 at 12:36 pm
[url=https://antabuse.site/]antabuse for sale uk[/url]
YonCounk · August 21, 2022 at 12:38 pm
[url=http://diclofenac.fun/]diclofenac 50 tablet[/url]
TedCounk · August 21, 2022 at 12:41 pm
[url=http://diclofenac.fun/]over the counter diclofenac cream[/url]
MichaelDwego · August 21, 2022 at 12:52 pm
[url=https://glucophage.icu/]medication metformin[/url]
Davidhup · August 21, 2022 at 12:54 pm
[url=https://albenza.icu/]albenza costs[/url]
MiclTek · August 21, 2022 at 1:05 pm
[url=http://fildena.fun/]fildena 100 mg price[/url]
SamCounk · August 21, 2022 at 1:06 pm
[url=https://fluoxetine.life/]prozac 10 mg tablet[/url] [url=https://tadacip.xyz/]tadacip india[/url] [url=https://sildalis.click/]sildalis[/url] [url=https://modafinil.durban/]provigil in canada[/url] [url=https://orlistat.life/]buy xenical online india[/url] [url=https://ventolin.click/]ventolin 2[/url] [url=https://onlinepharmacy.run/]buying from canadian pharmacies[/url]
Edgarlor · August 21, 2022 at 1:12 pm
[url=http://avana.click/]dapoxetine uk pharmacy[/url]
MichaelGuabe · August 21, 2022 at 1:20 pm
[url=http://finasteride.site/]propecia viagra[/url]
WilliamWem · August 21, 2022 at 1:23 pm
[url=https://proscar.site/]prosteride[/url] [url=https://hydroxyzine.fun/]generic atarax[/url] [url=https://prozac.media/]prozac pills[/url]
IvyCounk · August 21, 2022 at 1:23 pm
[url=http://dutasteride.fun/]drug avodart[/url] [url=http://viagraotabs.quest/]viagra pills prescription[/url] [url=http://lisinopril.site/]lisinopril 20[/url] [url=http://fluoxetine.life/]buy prozac online uk[/url] [url=http://budesonide.site/]budesonide for sale[/url]
MichaelDwego · August 21, 2022 at 1:28 pm
[url=https://hydroxychloroquine.ink/]plaquenil cheap[/url]
JimCounk · August 21, 2022 at 1:40 pm
[url=https://viagravtabs.monster/]sildenafil price 50 mg[/url]
KiaCounk · August 21, 2022 at 2:00 pm
[url=http://valtrex.fun/]order valtrex onlines[/url]
SueCounk · August 21, 2022 at 2:08 pm
[url=http://nexium.cfd/]nexium pills for sale[/url]
Charlesaduse · August 21, 2022 at 2:16 pm
[url=http://cialiswtab.quest/]order cialis canada[/url]
Michaelemult · August 21, 2022 at 2:28 pm
[url=https://hydroxyzine.fun/]atarax over the counter[/url]
IvyCounk · August 21, 2022 at 2:47 pm
[url=http://atomoxetine.sbs/]strattera 5mg[/url] [url=http://valtrex.fun/]1000 mg valtrex daily[/url]
JaneCounk · August 21, 2022 at 2:54 pm
[url=http://orlistat.life/]orlistat over the counter canada[/url]
MarvinZem · August 21, 2022 at 2:54 pm
[url=https://levothyroxine.xyz/]synthroid online no prescription[/url]
IvyCounk · August 21, 2022 at 3:01 pm
[url=http://hydroxychloroquine.business/]plaquenil generic[/url] [url=http://accutane.click/]cost of accutane[/url] [url=http://dutasteride.fun/]avodart 0.5[/url]
RicIsose · August 21, 2022 at 3:02 pm
[url=https://prozac.media/]fluoxetine medicine[/url] [url=https://trazodone.icu/]desyrel generic[/url] [url=https://hydrochlorothiazide.cfd/]best price for hydrochlorothiazide[/url] [url=https://suhagra.fun/]suhagra online order[/url]
SamCounk · August 21, 2022 at 3:08 pm
[url=https://mebendazole.site/]vermox cost[/url] [url=https://methocarbamol.site/]3000mg robaxin[/url] [url=https://modafinil.run/]modafinil 2018[/url] [url=https://levofloxacin.site/]levaquin 500mg[/url]
RicIsose · August 21, 2022 at 3:11 pm
[url=https://estrace.fun/]estrace cream purchase in mexico[/url] [url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 2[/url] [url=https://onlinepharmacy.win/]no rx needed pharmacy[/url] [url=https://seroquel.fun/]seroquel 25mg[/url] [url=https://onlinepharmacy.download/]online pharmacy china[/url] [url=https://antabuse.site/]antabuse otc[/url] [url=https://albenza.business/]albendazole buy online usa[/url] [url=https://vardenafil.network/]levitra order[/url]
MiclTek · August 21, 2022 at 3:13 pm
[url=http://trazodone.fun/]trazodone 200 mg tablets[/url]
PaulCounk · August 21, 2022 at 3:26 pm
[url=https://levofloxacin.life/]levaquin tablets[/url]
MichaelDwego · August 21, 2022 at 3:30 pm
[url=https://drugstore.today/]canadian pharmacy generic viagra[/url]
ZakCounk · August 21, 2022 at 3:40 pm
[url=http://budesonide.site/]budesonide cost usa[/url] [url=http://viagra.monster/]viagra uk cost[/url] [url=http://sildalis.fun/]where to buy sildalis[/url]
KiaCounk · August 21, 2022 at 3:55 pm
[url=http://orlistat.fun/]xenical buy uk[/url]
RodneyTab · August 21, 2022 at 3:55 pm
[url=http://budesonide.run/]budesonide over the counter[/url]
MiclTek · August 21, 2022 at 3:58 pm
[url=http://levothyroxine.xyz/]synthroid 25 pill[/url]
Estebanguall · August 21, 2022 at 4:01 pm
[url=https://retinoa.xyz/]retino cream price[/url]
RodneyTab · August 21, 2022 at 4:02 pm
[url=http://seroquel.site/]seroquel tabs[/url]
Estebanguall · August 21, 2022 at 4:03 pm
[url=https://albenza.business/]albenza 200 mg price[/url]
TedCounk · August 21, 2022 at 4:05 pm
[url=http://lisinopril.click/]url lisinopril hctz prescription[/url]
TeoCounk · August 21, 2022 at 4:13 pm
[url=http://valtrex.fun/]can i buy valtrex without prescription[/url]
DavisMug · August 21, 2022 at 4:17 pm
[url=http://suhagra.fun/]suhagra 50 online[/url]
DenCounk · August 21, 2022 at 4:22 pm
[url=http://mebendazole.site/]vermox pharmacy[/url]
AmyCounk · August 21, 2022 at 4:23 pm
[url=https://dutasteride.fun/]avodart .5mg price[/url]
JosephMaict · August 21, 2022 at 4:24 pm
[url=http://retinoa.xyz/]retino 0.25 cream price[/url] [url=http://suhagra.fun/]suhagra 100mg tablet price[/url] [url=http://antabuse.site/]canadian pharmacy antabuse[/url] [url=http://flagyl.site/]where to buy flagyl online[/url] [url=http://budesonide.run/]budesonide uk[/url] [url=http://fildena.fun/]buy fildena 50 mg[/url] [url=http://finasteride.site/]propecia drug[/url] [url=http://yasmin.monster/]where to get yasmin pill[/url]
AlanCounk · August 21, 2022 at 4:36 pm
[url=https://viagravtabs.monster/]viagra for women[/url] [url=https://ampicillin.site/]ampicillin[/url]
AshCounk · August 21, 2022 at 4:38 pm
[url=https://metformin.directory/]metformin 850 mg prices uk[/url] [url=https://chloroquine.live/]chloroquine ph 250 mg tablet[/url] [url=https://valtrex.agency/]get valtrex online[/url] [url=https://mebendazolevermox.shop/]buy vermox online usa[/url] [url=https://arimidex.shop/]arimidex australia buy[/url] [url=https://diflucan.directory/]where can i buy diflucan otc[/url] [url=https://avodart.digital/]avodart pharmacy uk[/url]
WilliamWem · August 21, 2022 at 4:39 pm
[url=https://cephalexin.icu/]keflex medication price[/url] [url=https://trental.xyz/]buy trental 400 mg online uk[/url] [url=https://onlinepharmacy.win/]which online pharmacy is the best[/url] [url=https://fildena.fun/]fildena 50[/url]
RicIsose · August 21, 2022 at 4:50 pm
[url=https://vardenafil.network/]best online pharmacy levitra[/url] [url=https://seroquel.fun/]seroquel 50mg coupon[/url] [url=https://fildena.fun/]cheap fildena 100[/url] [url=https://glucophage.icu/]where can i get metformin online[/url]
ElwoodGon · August 21, 2022 at 4:53 pm
[url=http://antabuse.site/]antabuse tablets[/url]
RicIsose · August 21, 2022 at 5:29 pm
[url=https://trazodone.fun/]100 mg trazodone[/url] [url=https://budesonide.run/]budecort 100[/url] [url=https://prednisolone.fun/]prednisolone 3 mg[/url] [url=https://augmentin.business/]amoxicillin cost india[/url] [url=https://trental.xyz/]buy trental online[/url] [url=https://drugstore.today/]good pharmacy[/url]
IvyCounk · August 21, 2022 at 5:42 pm
[url=http://cymbalta.site/]where to buy cymbalta[/url] [url=http://motrin.site/]motrin tablets cost[/url] [url=http://levofloxacin.site/]levaquin 500[/url] [url=http://ventolin.click/]ventolin uk pharmacy[/url] [url=http://atomoxetine.sbs/]strattera 40 mg prices[/url] [url=http://tadacip.xyz/]buy cheap tadacip[/url] [url=http://levofloxacin.life/]levaquin.com[/url] [url=http://clopidogrel.site/]plavix cost in india[/url]
Jameseloro · August 21, 2022 at 5:46 pm
[url=https://seroquel.site/]seroquel medication[/url] [url=https://flagyl.site/]flagyl 200mg[/url] [url=https://trazodone.icu/]how to get trazodone prescription[/url] [url=https://kamagra.fun/]can i buy kamagra over the counter[/url] [url=https://onlinepharmacy.media/]safe canadian pharmacy[/url] [url=https://prozac.media/]prozac for sale canada[/url]
ElwoodGon · August 21, 2022 at 5:46 pm
[url=http://albenza.business/]us price albenza[/url]
AmyCounk · August 21, 2022 at 5:49 pm
[url=https://lasix.wtf/]furosemide 100 mg online[/url]
TommyHepsy · August 21, 2022 at 5:53 pm
[url=https://dapoxetine.fun/]buy priligy in australia[/url]
AnnaCounk · August 21, 2022 at 6:00 pm
[url=https://valacyclovir.site/]online drugs valtrex[/url]
ZakCounk · August 21, 2022 at 6:00 pm
[url=http://clopidogrel.site/]buy plavix from canada[/url] [url=http://albuterol.fun/]combivent cost[/url] [url=http://accutane.click/]accutane gel[/url] [url=http://viagrahtabs.quest/]buy viagra toronto[/url] [url=http://atomoxetine.sbs/]strattera 60 mg price[/url] [url=http://malegra.fun/]malegra 200 mg[/url] [url=http://levofloxacin.life/]buy levaquin online[/url]
NickCounk · August 21, 2022 at 6:08 pm
[url=https://methocarbamol.site/]robaxin otc in canada[/url]
MichaelDwego · August 21, 2022 at 6:25 pm
[url=https://hydroxychloroquine.ink/]plaquenil singapore[/url]
LisaCounk · August 21, 2022 at 7:07 pm
[url=https://viagravtabs.monster/]cheap viagra mastercard[/url]
AmyCounk · August 21, 2022 at 7:08 pm
[url=https://piroxicam.fun/]piroxicam gel[/url]
JoeCounk · August 21, 2022 at 7:22 pm
[url=https://viagrahtabs.quest/]buy generic viagra from europe[/url] [url=https://accutane.wtf/]accutane pharmacy prices[/url] [url=https://ampicillin.site/]ampicilin[/url] [url=https://viagraotabs.quest/]lowest price for generic viagra[/url] [url=https://valacyclovir.site/]buy valtrex canada[/url] [url=https://nexium.cfd/]nexium pill[/url]
MarvinZem · August 21, 2022 at 7:33 pm
[url=https://trazodone.icu/]trazodone 450 mg[/url]
Michaelemult · August 21, 2022 at 7:41 pm
[url=https://flagyl.site/]buy generic flagyl[/url]
MiaCounk · August 21, 2022 at 7:42 pm
[url=http://diflucan.sbs/]diflucan tablets online[/url]
JackCounk · August 21, 2022 at 7:43 pm
[url=https://cymbalta.site/]cymbalta prescription[/url]
SueCounk · August 21, 2022 at 7:52 pm
[url=http://zovirax.fun/]zovirax 200mg tablets price in india[/url]
RicIsose · August 21, 2022 at 7:56 pm
[url=https://seroquel.fun/]how much is seroquel[/url] [url=https://tamoxifen.fun/]tamoxifen generic[/url] [url=https://cephalexin.icu/]cephalexin without a prescription[/url] [url=https://prednisone.network/]60 mg prednisone[/url] [url=https://allopurinol.xyz/]allopurinol zyloprim[/url]
LisaCounk · August 21, 2022 at 8:12 pm
[url=https://lisinopril.site/]lisinopril 25[/url]
NickCounk · August 21, 2022 at 8:26 pm
[url=https://viagra.monster/]where to purchase viagra in canada[/url]
TedCounk · August 21, 2022 at 8:27 pm
[url=http://accutane.wtf/]canadian online pharmacy accutane[/url]
DarrylSef · August 21, 2022 at 8:29 pm
[url=http://avana.click/]dapoxetine where can i buy[/url] [url=http://sildenafil.site/]sildenafil 100mg from india[/url] [url=http://provigil.life/]provigil 100 mg tablet[/url] [url=http://albenza.icu/]albendazole 400 mg pills[/url] [url=http://diflucan.xyz/]diflucan uk online[/url] [url=http://vardenafil.network/]cheapest levitra generic[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide 12.5 mg tablets[/url] [url=http://augmentin.business/]augmentin 875[/url]
Jameseloro · August 21, 2022 at 8:30 pm
[url=https://azithromycin.media/]no prescription zithromax[/url] [url=https://tamoxifen.fun/]cheap nolvadex[/url] [url=https://augmentin.business/]antibiotic augmentin[/url] [url=https://hydroxyzine.fun/]atarax uk[/url] [url=https://sildenafil.site/]can you buy generic viagra over the counter[/url] [url=https://finasteride.site/]propecia.com[/url]
TedCounk · August 21, 2022 at 8:33 pm
[url=http://budesonide.site/]budesonide cost[/url]
MiclTek · August 21, 2022 at 8:38 pm
[url=http://drugstore.today/]canadian pharmacy coupon code[/url]
RicIsose · August 21, 2022 at 8:46 pm
[url=https://suhagra.fun/]suhagra online[/url] [url=https://proscar.site/]generic proscar 5mg[/url] [url=https://zanaflex.site/]buy zanaflex 4mg online[/url]
MarvinZem · August 21, 2022 at 8:48 pm
[url=https://levothyroxine.fun/]synthroid 125 mcg tablet[/url]
BooCounk · August 21, 2022 at 8:56 pm
[url=https://retinoa.boutique/]retino 05[/url]
DarrylSef · August 21, 2022 at 9:01 pm
[url=http://albenza.business/]buy albendazole on line[/url] [url=http://diflucan.xyz/]where can you get diflucan over the counter[/url] [url=http://prednisolone.fun/]prednisolone 4 mg tablets[/url] [url=http://levothyroxine.fun/]synthroid tab 88mcg[/url] [url=http://allopurinol.icu/]allopurinol 500 mg tablet[/url] [url=http://levothyroxine.xyz/]synthroid 125 mg price[/url] [url=http://vermox.fun/]where to get vermox[/url] [url=http://provigil.life/]buy modafinil singapore[/url]
Jameseloro · August 21, 2022 at 9:06 pm
[url=https://seroquel.site/]seroquel for ocd[/url] [url=https://cialiswtab.quest/]cialis cheapest price uk[/url] [url=https://yasmin.monster/]yasmin prescription[/url] [url=https://triamterene.cfd/]triamterene blood pressure[/url] [url=https://allopurinol.xyz/]allopurinol generic[/url] [url=https://onlinepharmacy.download/]reputable online pharmacy reddit[/url]
Edgarlor · August 21, 2022 at 9:18 pm
[url=http://kamagra.fun/]200 mg kamagra[/url]
KiaCounk · August 21, 2022 at 9:23 pm
[url=http://dexamethasone.site/]dexamethasone tablets 1.5 mg[/url]
YonCounk · August 21, 2022 at 9:24 pm
[url=http://levofloxacin.site/]levaquin antibiotics[/url]
IvyCounk · August 21, 2022 at 9:26 pm
[url=http://ventolin.click/]ventolin australia[/url] [url=http://orlistat.life/]xenical buy online nz[/url] [url=http://ampicillin.site/]ampicillin 500 mg tablet[/url] [url=http://sildalis.click/]buy sildalis online[/url] [url=http://fluoxetine.fun/]order generic prozac online[/url]
Charlesaduse · August 21, 2022 at 9:30 pm
[url=http://onlinepharmacy.media/]mexican online mail order pharmacy[/url]
IvyCounk · August 21, 2022 at 9:56 pm
[url=http://zovirax.fun/]zovirax topical cream[/url] [url=http://diflucan.sbs/]buy diflucan over the counter[/url] [url=http://modafinil.run/]purchase provigil online[/url] [url=http://valtrex.fun/]valtrex 1g price[/url]
JaneCounk · August 21, 2022 at 10:08 pm
[url=http://clopidogrel.site/]clopidogrel cost[/url]
Curtisvibia · August 21, 2022 at 10:41 pm
[url=https://hydroxyzine.fun/]atarax 25 mg tablet[/url]
RicIsose · August 21, 2022 at 10:57 pm
[url=https://antabuse.site/]disulfiram 500[/url] [url=https://onlinepharmacy.download/]mexican pharmacy what to buy[/url] [url=https://provigil.life/]modafinil 100mg coupon[/url] [url=https://avana.click/]buy generic dapoxetine online[/url] [url=https://sildenafil.site/]real viagra no prescription[/url] [url=https://seroquel.site/]cost for 90 seroquel 200mg tablets[/url] [url=https://inderal.site/]1 propranolol[/url] [url=https://diflucan.xyz/]diflucan 200[/url]
SamCounk · August 21, 2022 at 11:01 pm
[url=https://modafinil.durban/]modafinil online india[/url] [url=https://zestoretic.fun/]zestoretic 20 12.5 mg[/url] [url=https://viagraotabs.quest/]cheap viagra pills canada[/url] [url=https://nexium.cfd/]nexium online[/url] [url=https://fluoxetine.fun/]order prozac online[/url]
KimCounk · August 21, 2022 at 11:07 pm
[url=https://mebendazole.site/]mebendazole tablets[/url]
JudyCounk · August 21, 2022 at 11:15 pm
[url=https://ventolin.fun/]where to buy albuterol tablets[/url]
JasonCounk · August 21, 2022 at 11:23 pm
[url=http://dutasteride.fun/]avodart pharmacy[/url]
EvaCounk · August 21, 2022 at 11:34 pm
[url=https://viagrahtabs.quest/]viagra 100 mg generic[/url]
Jameseloro · August 22, 2022 at 12:01 am
[url=https://prozac.media/]online fluoxetine prescription[/url] [url=https://inderal.site/]propranolol cheap without prescription[/url] [url=https://budesonide.run/]budesonide cream[/url] [url=https://seroquel.fun/]cost of seroquel xr[/url]
Curtisvibia · August 22, 2022 at 12:06 am
[url=https://fildena.fun/]buy fildena 150 online[/url]
Jameseloro · August 22, 2022 at 12:07 am
[url=https://trazodone.fun/]trazodone brand name[/url] [url=https://triamterene.cfd/]triamterene 37.5mg[/url] [url=https://trazodone.icu/]trazodone 50mg[/url] [url=https://vardenafil.network/]cheep lavitra for sale[/url] [url=https://allopurinol.xyz/]allopurinol 2 300 mg[/url]
EyeCounk · August 22, 2022 at 12:08 am
[url=http://tadacip.xyz/]tadacip for sale uk[/url] [url=http://hydroxychloroquine.business/]quineprox 90[/url]
ZakCounk · August 22, 2022 at 12:09 am
[url=http://valtrex.fun/]valtrex prescription online[/url] [url=http://malegra.fun/]generic malegra dxt[/url] [url=http://zestoretic.fun/]zestoretic 30 25mg[/url] [url=http://levitra.sbs/]levitra 40 mg price[/url] [url=http://cymbalta.site/]cymbalta 200mg[/url]
Jameseloro · August 22, 2022 at 12:16 am
[url=https://diflucan.xyz/]price of diflucan[/url] [url=https://vardenafil.network/]cheapest levitra[/url] [url=https://onlinepharmacy.download/]legit non prescription pharmacies[/url] [url=https://seroquel.site/]seroquel cost without insurance[/url]
RicIsose · August 22, 2022 at 12:33 am
[url=https://seroquel.site/]seroquel iv[/url] [url=https://zanaflex.site/]zanaflex 4mg price in usa[/url] [url=https://augmentin.business/]augmentin 625 online[/url] [url=https://albenza.icu/]purchase albendazole[/url] [url=https://suhagra.fun/]suhagra 100 for sale[/url]
MarkCounk · August 22, 2022 at 12:47 am
[url=https://zestoretic.fun/]zestoretic 10 12.5[/url]
YonCounk · August 22, 2022 at 12:49 am
[url=http://nexium.cfd/]canada nexium price[/url]
DenCounk · August 22, 2022 at 12:57 am
[url=http://lisinopril.site/]zestril brand name[/url]
AnnaCounk · August 22, 2022 at 12:59 am
[url=https://lasix.wtf/]furosemide online no prescription[/url]
DavisMug · August 22, 2022 at 1:01 am
[url=http://vardenafil.network/]vardenafil 20mg price us[/url]
RichardFaply · August 22, 2022 at 1:05 am
[url=http://avana.click/]buy super avana[/url] [url=http://sildenafil.site/]buy brand viagra 100mg[/url] [url=http://trazodone.icu/]generic desyrel online[/url] [url=http://seroquel.site/]seroquel australia[/url] [url=http://glucophage.site/]metformin how to buy[/url]
MiclTek · August 22, 2022 at 1:07 am
[url=http://budesonide.run/]buy budesonide[/url]
EvaCounk · August 22, 2022 at 1:09 am
[url=https://sildalis.fun/]buy sildalis online[/url]
SueCounk · August 22, 2022 at 1:13 am
[url=http://levofloxacin.life/]generic levaquin[/url]
JackCounk · August 22, 2022 at 1:16 am
[url=https://doxycycline.network/]doxycycline 50mg tablets[/url]
TeoCounk · August 22, 2022 at 1:52 am
[url=http://viagraotabs.quest/]cheap viagra online australia[/url]
AshCounk · August 22, 2022 at 1:56 am
[url=https://buyproscar.monster/]how to order propecia online[/url] [url=https://metformin.boutique/]buy glucophage 1000mg[/url]
Michaelemult · August 22, 2022 at 2:04 am
[url=https://albenza.business/]albendazole in india[/url]
AshCounk · August 22, 2022 at 2:05 am
[url=https://priligy.cfd/]buy dapoxetine us[/url] [url=https://zmtpills.com/]serevent cost[/url]
Edgarlor · August 22, 2022 at 2:09 am
[url=http://prozac.media/]prozac 60 mg price[/url]
SueCounk · August 22, 2022 at 2:12 am
[url=http://diflucan.sbs/]diflucan 750 mg[/url]
RodneyTab · August 22, 2022 at 2:37 am
[url=http://hydroxyzine.fun/]atarax 10mg price in india[/url]
AnnaCounk · August 22, 2022 at 2:41 am
[url=https://orlistat.life/]orlistat 60 mg pills[/url]
MarvinZem · August 22, 2022 at 2:42 am
[url=https://albenza.icu/]albendazole sale[/url]
SueCounk · August 22, 2022 at 2:48 am
[url=http://cialiswtabs.monster/]cialis purchase online australia[/url]
Samuelraisk · August 22, 2022 at 2:53 am
[url=https://estrace.fun/]estrace 2mg[/url]
SamCounk · August 22, 2022 at 2:58 am
[url=https://ventolin.fun/]ventolin 200 mcg[/url] [url=https://accutane.wtf/]cost of accutane[/url] [url=https://fluoxetine.fun/]buy prozac online india[/url]
DavisMug · August 22, 2022 at 3:00 am
[url=http://levothyroxine.fun/]can i buy synthroid online[/url]
WilliamWem · August 22, 2022 at 3:23 am
[url=https://dapoxetine.fun/]dapoxetine premature ejaculation[/url] [url=https://suhagra.fun/]suhagra 50 mg tablet online purchase[/url] [url=https://yasmin.monster/]yasmin 28 birth control[/url] [url=https://tamoxifen.fun/]nolvadex order online uk[/url] [url=https://onlinepharmacy.win/]online pharmacy delivery[/url] [url=https://estrace.fun/]estrace tablets price[/url]
AlanCounk · August 22, 2022 at 3:31 am
[url=https://atomoxetine.sbs/]strattera pills for sale[/url] [url=https://valacyclovir.site/]valtrex over the counter uk[/url] [url=https://diflucan.sbs/]where can i buy diflucan otc[/url] [url=https://albuterol.fun/]ventolin 4mg uk[/url] [url=https://orlistat.life/]buying orlistat in mexico[/url] [url=https://levofloxacin.site/]levaquin cipro[/url] [url=https://ventolin.click/]ventolin tablet[/url] [url=https://cialiswtabs.monster/]where can i get cialis cheap[/url]
RichardFaply · August 22, 2022 at 4:01 am
[url=http://glucophage.icu/]metformin prescription canada[/url] [url=http://albenza.icu/]buy albendazole tablets[/url] [url=http://glucophage.site/]buy metformin no prescription[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide cheap[/url] [url=http://kamagra.fun/]buy kamagra oral jelly usa[/url] [url=http://suhagra.fun/]suhagra 25 mg tablet price[/url]
MiclTek · August 22, 2022 at 4:03 am
[url=http://retinoa.xyz/]retino 0.05 price[/url]
ZakCounk · August 22, 2022 at 4:06 am
[url=http://accutane.click/]where to get accutane in singapore[/url] [url=http://ventolin.fun/]albuterol brand name[/url]
Samuelraisk · August 22, 2022 at 4:18 am
[url=https://seroquel.site/]seroquel xr 400 mg[/url]
Samuelraisk · August 22, 2022 at 4:40 am
[url=https://hydroxyzine.fun/]atarax sale[/url]
IvyCounk · August 22, 2022 at 4:44 am
[url=http://dutasteride.fun/]avodart cheapest[/url] [url=http://albuterol.fun/]ventolin inhaler no prescription[/url] [url=http://valtrex.fun/]generic valtrex online pharmacy[/url] [url=http://accutane.click/]order accutane online canada[/url] [url=http://propecia.capetown/]propecia cheapest price australia[/url] [url=http://tadacip.xyz/]tadacip uk[/url]
MichaelGuabe · August 22, 2022 at 4:50 am
[url=http://suhagra.fun/]suhagra tablet 50 mg[/url]
Jameseloro · August 22, 2022 at 4:59 am
[url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 12.5 mg daily[/url] [url=https://cephalexin.icu/]cephalexin prescription cost[/url] [url=https://augmentin.business/]where to buy augmentin in singapore[/url] [url=https://dapoxetine.fun/]avana 522[/url] [url=https://trazodone.fun/]trazodone cost uk[/url] [url=https://estrace.fun/]cost of estrace cream in canada[/url] [url=https://kamagra.fun/]kamagra liquid jelly[/url] [url=https://sildenafil.site/]sildenafil prices in india[/url]
JoeCounk · August 22, 2022 at 5:04 am
[url=https://dutasteride.fun/]avodart sale[/url] [url=https://motrin.site/]motrin 50 mg[/url] [url=https://diclofenac.fun/]diclofenac sod ec[/url]
Charlesaduse · August 22, 2022 at 5:07 am
[url=http://yasmin.monster/]yasmin price australia[/url]
JudyCounk · August 22, 2022 at 5:16 am
[url=https://doxycycline.network/]doxycycline 100mg price[/url]
SamCounk · August 22, 2022 at 5:19 am
[url=https://piroxicam.fun/]piroxicam capsule 20mg[/url] [url=https://lasix.wtf/]lasix uk buy[/url] [url=https://nexium.cfd/]nexium 42 capsules coupon[/url]
EyeCounk · August 22, 2022 at 5:44 am
[url=http://fluoxetine.life/]prozac generic tablets[/url] [url=http://tadacip.xyz/]tadacip canada[/url] [url=http://onlinepharmacy.run/]legitimate mexican pharmacy online[/url] [url=http://doxycycline.network/]doxycycline over the counter uk[/url] [url=http://lisinopril.click/]lisinopril in usa[/url] [url=http://orlistat.fun/]order orlistat online[/url]
JimCounk · August 22, 2022 at 5:55 am
[url=https://cymbalta.site/]order cymbalta 60 mg online[/url]
KiaCounk · August 22, 2022 at 5:59 am
[url=http://cialiswtabs.monster/]generic tadalafil south africa[/url]
AmyCounk · August 22, 2022 at 6:07 am
[url=https://fluoxetine.life/]40 mg fluoxetine daily[/url]
MiaCounk · August 22, 2022 at 6:14 am
[url=http://mebendazole.site/]vermox online canada[/url]
RodneyTab · August 22, 2022 at 6:15 am
[url=http://cephalexin.icu/]keflex 250 mg cap[/url]
MichaelGuabe · August 22, 2022 at 6:34 am
[url=http://suhagra.fun/]buy suhagra 50mg[/url]
MichaelDwego · August 22, 2022 at 6:44 am
[url=https://glucophage.site/]metformin online canada[/url]
Davidhup · August 22, 2022 at 6:47 am
[url=https://retinoa.xyz/]retino cream[/url]
EyeCounk · August 22, 2022 at 6:52 am
[url=http://silagra.site/]buy silagra online uk[/url] [url=http://modafinil.durban/]modafinil online pharmacy[/url] [url=http://propecia.capetown/]can you buy generic propecia online[/url]
IvyCounk · August 22, 2022 at 6:54 am
[url=http://lisinopril.site/]lisinopril pharmacy online[/url] [url=http://tadacip.xyz/]tadacip 10 mg price[/url] [url=http://orlistat.life/]xenical 120mg capsules australia[/url] [url=http://motrin.site/]motrin 325 mg[/url]
EvaCounk · August 22, 2022 at 6:54 am
[url=https://dexamethasone.site/]dexamethasone 40 mg tablets[/url]
DarrylSef · August 22, 2022 at 6:58 am
[url=http://finasteride.site/]how to get propecia australia[/url] [url=http://proscar.site/]buy propecia online south africa[/url] [url=http://prednisolone.fun/]prednisolone 10 mg daily[/url] [url=http://levothyroxine.xyz/]synthroid 112 mcg in india[/url] [url=http://onlinepharmacy.win/]canadian pharmacy coupon[/url] [url=http://flagyl.site/]flagyl pills price[/url] [url=http://hydroxyzine.fun/]atarax 25mg uk[/url] [url=http://trazodone.icu/]desyrel tablet[/url]
RichardFaply · August 22, 2022 at 7:05 am
[url=http://onlinepharmacy.win/]online pharmacy cialis[/url] [url=http://suhagra.fun/]suhagra 100mg price canadian pharmacy[/url] [url=http://hydrochlorothiazide.cfd/]zestoretic 20 25 mg[/url] [url=http://estrace.fun/]estrace 1 mg[/url] [url=http://prozac.media/]fluoxetine for sale online[/url]
EvaCounk · August 22, 2022 at 7:22 am
[url=https://atomoxetine.sbs/]strattera 18 mg price[/url]
IvyCounk · August 22, 2022 at 7:27 am
[url=http://modafinil.durban/]provigil mexico pharmacy[/url] [url=http://lisinopril.click/]lisinopril without prescription[/url] [url=http://methocarbamol.site/]robaxin 750 tablets[/url] [url=http://zovirax.fun/]zovirax brand[/url] [url=http://cialiswtabs.monster/]buy tadalafil online[/url] [url=http://dutasteride.fun/]generic avodart 0.5 mg[/url] [url=http://ventolin.fun/]albuterol 0.08[/url] [url=http://albuterol.fun/]generic albuterol online[/url]
Charlesaduse · August 22, 2022 at 7:47 am
[url=http://prozac.media/]fluoxetine 10 mg[/url]
Edgarlor · August 22, 2022 at 7:51 am
[url=http://hydrochlorothiazide.cfd/]zestoretic 20 25 mg[/url]
RobertFoold · August 22, 2022 at 7:57 am
[url=https://trazodone.fun/]where to get trazodone[/url]
NickCounk · August 22, 2022 at 7:59 am
[url=https://viagra.monster/]best sildenafil 20mg coupon[/url]
LisaCounk · August 22, 2022 at 8:06 am
[url=https://valtrex.fun/]valtrex otc drug[/url]
KimCounk · August 22, 2022 at 8:09 am
[url=https://atomoxetine.sbs/]strattera 60 mg capsule[/url]
Davidhup · August 22, 2022 at 8:14 am
[url=https://vardenafil.network/]prescription levitra online[/url]
TeoCounk · August 22, 2022 at 8:32 am
[url=http://mebendazole.site/]vermox plus[/url]
JimCounk · August 22, 2022 at 8:46 am
[url=https://orlistat.life/]orlistat 60 mg generic[/url]
AlanCounk · August 22, 2022 at 8:49 am
[url=https://modafinil.durban/]provigil online pharmacy[/url] [url=https://lisinopril.site/]lisinopril 1 mg[/url]
MarkCounk · August 22, 2022 at 8:49 am
[url=https://albuterol.fun/]0.5 albuterol[/url]
RichardFaply · August 22, 2022 at 8:55 am
[url=http://diflucan.xyz/]can you order diflucan online[/url] [url=http://trazodone.fun/]trazodone pill 50mg[/url] [url=http://tamoxifen.fun/]tamoxifen 40 mg daily[/url] [url=http://antabuse.site/]antabuse 250 mg[/url] [url=http://prednisone.network/]prednisone 105mg[/url] [url=http://onlinepharmacy.download/]legitimate online pharmacy usa[/url]
EvaCounk · August 22, 2022 at 9:11 am
[url=https://celexa.cfd/]citalopram 20 mg cost[/url]
SamCounk · August 22, 2022 at 9:27 am
[url=https://propecia.capetown/]buy propecia hair loss[/url] [url=https://mebendazole.site/]vermox uk[/url] [url=https://malegra.fun/]generic malegra fxt[/url] [url=https://viagra.monster/]best place to buy viagra online[/url] [url=https://dutasteride.fun/]buy cheap avodart no rx[/url] [url=https://cialiswtabs.monster/]tadalafil generic mexico[/url] [url=https://zovirax.fun/]purchase acyclovir online[/url] [url=https://budesonide.site/]budecort 1mg[/url]
MiaCounk · August 22, 2022 at 9:55 am
[url=http://valtrex.fun/]valtrex 1000[/url]
PaulCounk · August 22, 2022 at 9:56 am
[url=https://orlistat.life/]medicine xenical capsules[/url]
ElwoodGon · August 22, 2022 at 10:02 am
[url=http://hydroxychloroquine.makeup/]where can i buy plaquenil[/url]
Estebanguall · August 22, 2022 at 10:06 am
[url=https://levothyroxine.xyz/]synthroid 100 mg cost[/url]
TimothyThive · August 22, 2022 at 10:09 am
[url=http://trazodone.icu/]trazodone 50 mg price[/url]
MichaelGuabe · August 22, 2022 at 10:21 am
[url=http://prednisolone.fun/]online pharmacy uk prednisolone[/url]
ElwoodGon · August 22, 2022 at 10:25 am
[url=http://prozac.media/]buy generic prozac no prescription[/url]
MichaelGuabe · August 22, 2022 at 10:43 am
[url=http://trazodone.fun/]trazodone 500 mg[/url]
TedCounk · August 22, 2022 at 10:47 am
[url=http://valtrex.fun/]valtrex cheap[/url]
DenCounk · August 22, 2022 at 10:47 am
[url=http://cymbalta.site/]cymbalta 20[/url]
MarvinZem · August 22, 2022 at 10:57 am
[url=https://dapoxetine.fun/]priligy over the counter usa[/url]
KimCounk · August 22, 2022 at 11:10 am
[url=https://lisinopril.site/]lisinopril tablets for sale[/url]
RodneyTab · August 22, 2022 at 11:10 am
[url=http://prednisone.network/]buy cheap prednisone online[/url]
ElwoodGon · August 22, 2022 at 11:23 am
[url=http://estrace.fun/]estrace pills[/url]
KimCounk · August 22, 2022 at 11:43 am
[url=https://cialiswtabs.monster/]how to buy cialis in uk[/url]
SueCounk · August 22, 2022 at 11:44 am
[url=http://sildalis.click/]buy cheap sildalis[/url]
AlanCounk · August 22, 2022 at 12:13 pm
[url=https://sildalis.fun/]sildalis canada[/url] [url=https://ventolin.fun/]can you buy ventolin over the counter in australia[/url] [url=https://mebendazole.site/]vermox australia[/url] [url=https://celexa.cfd/]citalopram drug[/url] [url=https://accutane.click/]accutane india pharmacy[/url] [url=https://propecia.capetown/]where can i get propecia[/url] [url=https://hydroxychloroquine.business/]quineprox 200 mg[/url] [url=https://lisinopril.site/]lisinopril pill 40 mg[/url]
TommyHepsy · August 22, 2022 at 12:19 pm
[url=https://azithromycin.media/]buy zithromax online cheap[/url]
MarvinZem · August 22, 2022 at 12:22 pm
[url=https://onlinepharmacy.download/]canadian online pharmacy no prescription[/url]
DarrylSef · August 22, 2022 at 12:34 pm
[url=http://inderal.site/]propranolol purchase online[/url] [url=http://flagyl.site/]flagyl buy[/url] [url=http://prednisone.network/]deltasone 10 mg cost[/url]
RichardFaply · August 22, 2022 at 12:42 pm
[url=http://drugstore.today/]best canadian pharmacy to order from[/url] [url=http://antabuse.site/]can you buy antabuse online[/url] [url=http://kamagra.fun/]kamagra jelly amazon[/url] [url=http://levothyroxine.fun/]synthroid 0.025 mcg[/url] [url=http://onlinepharmacy.media/]canadian pharmacy 24h com[/url] [url=http://flagyl.site/]buy generic flagyl[/url] [url=http://onlinepharmacy.download/]mail order pharmacy india[/url] [url=http://cialiswtab.quest/]purchase cialis in usa[/url]
Samuelraisk · August 22, 2022 at 12:48 pm
[url=https://albenza.icu/]albendazole 400 mg buy online[/url]
ElwoodGon · August 22, 2022 at 1:02 pm
[url=http://proscar.site/]propecia canada price[/url]
DavisMug · August 22, 2022 at 1:12 pm
[url=http://seroquel.fun/]generic form of seroquel[/url]
DarrylSef · August 22, 2022 at 1:24 pm
[url=http://levothyroxine.xyz/]synthroid online canada[/url] [url=http://levothyroxine.fun/]synthroid 50 mcg price[/url] [url=http://finasteride.site/]compare propecia prices[/url] [url=http://seroquel.fun/]seroquel brand name cost[/url] [url=http://flagyl.site/]flagyl no prescription[/url]
Samuelraisk · August 22, 2022 at 1:30 pm
[url=https://glucophage.site/]cheap glucophage[/url]
Curtisvibia · August 22, 2022 at 1:32 pm
[url=https://prednisolone.fun/]cost of prednisolone[/url]
DavisMug · August 22, 2022 at 1:43 pm
[url=http://prednisone.network/]prednisone cream over the counter[/url]
LisaCounk · August 22, 2022 at 1:46 pm
[url=https://lasix.wtf/]lasix without a prescription[/url]
NickCounk · August 22, 2022 at 2:08 pm
[url=https://tadacip.xyz/]tadacip 20mg[/url]
RichardFaply · August 22, 2022 at 2:17 pm
[url=http://finasteride.site/]medication finasteride 5mg[/url] [url=http://yasmin.monster/]yasmin 1955[/url] [url=http://budesonide.run/]canadian pharmacy budesonide[/url] [url=http://estrace.fun/]estrace[/url] [url=http://glucophage.icu/]metformin where to buy[/url] [url=http://cialiswtab.quest/]how to buy cialis in usa[/url] [url=http://suhagra.fun/]suhagra 100mg tablet[/url]
JoeCounk · August 22, 2022 at 2:18 pm
[url=https://modafinil.run/]modafinil online australia[/url] [url=https://lisinopril.click/]lisinopril 60 mg[/url] [url=https://tadacip.xyz/]tadacip for sale uk[/url] [url=https://sildalis.fun/]sildalis[/url] [url=https://atomoxetine.sbs/]strattera 25 mg capsule[/url] [url=https://ventolin.fun/]canadian pharmacy online albuterol[/url]
Samuelraisk · August 22, 2022 at 2:26 pm
[url=https://levothyroxine.fun/]synthroid for sale online[/url]
AmyCounk · August 22, 2022 at 2:30 pm
[url=https://clopidogrel.site/]plavix pill price[/url]
Charlesaduse · August 22, 2022 at 2:32 pm
[url=http://vermox.fun/]order vermox uk[/url]
Michaelemult · August 22, 2022 at 2:34 pm
[url=https://seroquel.fun/]seroquel withouth presription[/url]
MaryCounk · August 22, 2022 at 2:35 pm
[url=https://ventolin.fun/]combivent brand name[/url] [url=https://malegra.fun/]malegra[/url] [url=https://levitra.sbs/]levitra by mail[/url] [url=https://budesonide.site/]budesonide brand name[/url] [url=https://hydroxychloroquine.business/]plaquenil drug[/url] [url=https://lisinopril.click/]prinivil 10 mg tablet[/url]
MichaelGuabe · August 22, 2022 at 2:35 pm
[url=http://retinoa.xyz/]retino 05[/url]
WilliamWem · August 22, 2022 at 2:38 pm
[url=https://onlinepharmacy.download/]canadapharmacyonline legit[/url] [url=https://dapoxetine.fun/]where to buy priligy in usa[/url] [url=https://estrace.fun/]cost of estrace 2mg tablets[/url] [url=https://allopurinol.xyz/]allopurinol 10 mg[/url] [url=https://provigil.life/]how to get modafinil online[/url] [url=https://suhagra.fun/]suhagra for sale[/url]
TimothyThive · August 22, 2022 at 3:08 pm
[url=http://azithromycin.media/]azithromycin 500mg price in india[/url]
RodneyTab · August 22, 2022 at 3:21 pm
[url=http://yasmin.monster/]yasmin pill cost[/url]
EvaCounk · August 22, 2022 at 3:21 pm
[url=https://motrin.site/]motrin 600 price[/url]
MarvinZem · August 22, 2022 at 3:23 pm
[url=https://seroquel.fun/]generic seroquel 400 mg cost[/url]
WilliamWem · August 22, 2022 at 3:47 pm
[url=https://onlinepharmacy.media/]tops pharmacy[/url] [url=https://onlinepharmacy.win/]canadian pharmacy cialis 20mg[/url] [url=https://finasteride.site/]propecia prescription online[/url] [url=https://vardenafil.network/]buy cheap levitra[/url] [url=https://prednisone.network/]prednisone 1 mg daily[/url] [url=https://yasmin.monster/]purchase yasmin no prescription[/url]
TeoCounk · August 22, 2022 at 4:12 pm
[url=http://silagra.site/]buy cheap silagra[/url]
TedCounk · August 22, 2022 at 4:14 pm
[url=http://sildalis.fun/]sildalis tablets[/url]
LisaCounk · August 22, 2022 at 4:21 pm
[url=https://valtrex.fun/]price of valtrex[/url]
EvaCounk · August 22, 2022 at 4:33 pm
[url=https://levofloxacin.life/]levofloxacin[/url]
UgoCounk · August 22, 2022 at 4:33 pm
[url=http://cipro.cfd/]ciprofloxacin capsule[/url]
MichaelDwego · August 22, 2022 at 4:38 pm
[url=https://onlinepharmacy.win/]no prescription needed pharmacy[/url]
KimCounk · August 22, 2022 at 4:44 pm
[url=https://modafinil.durban/]where to buy modafinil[/url]
JosephMaict · August 22, 2022 at 4:49 pm
[url=http://augmentin.business/]augmentin for sale[/url] [url=http://cialiswtab.quest/]cost cialis 5 mg[/url] [url=http://diflucan.xyz/]over the counter diflucan pill[/url] [url=http://suhagra.fun/]suhagra 50 price[/url] [url=http://cephalexin.icu/]cephalexin 500mg capsule cost[/url] [url=http://inderal.site/]inderal 10 mg tablet for sale online[/url] [url=http://retinoa.xyz/]retino 0.025 cream[/url] [url=http://onlinepharmacy.win/]australia online pharmacy free shipping[/url]
UgoCounk · August 22, 2022 at 4:51 pm
[url=http://mebendazole.store/]vermox 500[/url]
AnnaCounk · August 22, 2022 at 5:10 pm
[url=https://dutasteride.fun/]avodart price usa[/url]
EyeCounk · August 22, 2022 at 5:11 pm
[url=http://doxycycline.network/]doxycycline for sale[/url] [url=http://piroxicam.fun/]feldene 20 price[/url] [url=http://zestoretic.fun/]prinzide zestoretic[/url]
MarkCounk · August 22, 2022 at 5:20 pm
[url=https://zestoretic.fun/]zestoretic online[/url]
Michaeldrist · August 22, 2022 at 5:25 pm
[url=http://budesonide.run/]budesonide tablets[/url]
JoeCounk · August 22, 2022 at 5:55 pm
[url=https://levofloxacin.life/]levaquin medication[/url] [url=https://propecia.capetown/]propecia brand name[/url] [url=https://onlinepharmacy.run/]online pharmacy discount code[/url]
RichardFaply · August 22, 2022 at 6:02 pm
[url=http://avana.click/]dapoxetine over the counter[/url] [url=http://hydroxychloroquine.makeup/]hydroxychloroquine 200 mg cost[/url]
Michaelemult · August 22, 2022 at 6:03 pm
[url=https://retinoa.xyz/]retino gel[/url]
DavisMug · August 22, 2022 at 6:04 pm
[url=http://vardenafil.network/]levitra soft[/url]
RobertFoold · August 22, 2022 at 6:13 pm
[url=https://allopurinol.xyz/]allopurinol prescription uk[/url]
JasonCounk · August 22, 2022 at 6:15 pm
[url=http://accutane.click/]how do i get accutane[/url]
IvyCounk · August 22, 2022 at 6:18 pm
[url=http://silagra.site/]buy silagra online in india[/url] [url=http://accutane.click/]generic accutane costs[/url] [url=http://tadacip.xyz/]online tadacip[/url] [url=http://zovirax.fun/]400 mg acyclovir tablets[/url] [url=http://dutasteride.fun/]avodart capsule[/url] [url=http://onlinepharmacy.run/]us pharmacy no prescription[/url] [url=http://fluoxetine.fun/]prozac generic south africa[/url] [url=http://orlistat.life/]xenical diet pills[/url]
KiaCounk · August 22, 2022 at 6:25 pm
[url=http://valtrex.fun/]where to buy valtrex over the counter[/url]
SueCounk · August 22, 2022 at 6:26 pm
[url=http://valtrex.fun/]valtrex cost australia[/url]
SueCounk · August 22, 2022 at 7:01 pm
[url=http://piroxicam.fun/]piroxicam 5 mg[/url]
ElwoodGon · August 22, 2022 at 7:03 pm
[url=http://levothyroxine.xyz/]synthroid pills[/url]
RobertFoold · August 22, 2022 at 7:27 pm
[url=https://hydroxychloroquine.makeup/]plaquenil tab 200mg cost[/url]
WilliamWem · August 22, 2022 at 7:28 pm
[url=https://inderal.site/]inderal cheap[/url] [url=https://vardenafil.network/]levitra price in india[/url] [url=https://azithromycin.media/]zithromax pfizer[/url] [url=https://hydroxychloroquine.ink/]plaquenil 600 mg[/url] [url=https://glucophage.site/]metformin from mexico[/url] [url=https://avana.click/]dapoxetine uk price[/url] [url=https://dapoxetine.fun/]dapoxetine 60 mg in usa[/url]
Edgarlor · August 22, 2022 at 7:38 pm
[url=http://seroquel.fun/]seroquel 5 mg[/url]
AshCounk · August 22, 2022 at 7:47 pm
[url=https://toradol.works/]toradol tablets[/url] [url=https://amoxicillin.email/]cheap amoxicillin in india[/url] [url=https://buyproscar.store/]finasteride hair[/url] [url=https://augmentin.golf/]amoxil cost[/url] [url=https://pentoxifyllinetrental.monster/]trental 2018[/url] [url=https://ventolin.digital/]ventolin over the counter canada[/url]
IvyCounk · August 22, 2022 at 8:19 pm
[url=http://methocarbamol.site/]robaxin iv[/url] [url=http://mebendazole.site/]buy vermox[/url] [url=http://orlistat.life/]xenical 120mg cap[/url] [url=http://sildalis.click/]sildalis canada[/url]
JoeCounk · August 22, 2022 at 8:24 pm
[url=https://hydroxychloroquine.business/]hydroxychloroquine order online[/url] [url=https://lisinopril.site/]lisinopril 250mg[/url] [url=https://motrin.site/]motrin 600 mg[/url] [url=https://valacyclovir.site/]valtrex without prescription com[/url] [url=https://valtrex.fun/]valtrex 40 mg[/url]
SueCounk · August 22, 2022 at 8:32 pm
[url=http://sildalis.click/]canadian pharmacy sildalis[/url]
TedCounk · August 22, 2022 at 8:40 pm
[url=http://levofloxacin.life/]levaquin price[/url]
UgoCounk · August 22, 2022 at 8:47 pm
[url=http://diflucan.email/]buy diflucan online without prescription[/url]
JasonCounk · August 22, 2022 at 8:54 pm
[url=http://viagra.monster/]generic sildenafil in canada[/url]
DarrylSef · August 22, 2022 at 9:02 pm
[url=http://drugstore.today/]pharmacy online shopping usa[/url] [url=http://onlinepharmacy.media/]no prescription needed canadian pharmacy[/url]
Michaelemult · August 22, 2022 at 9:05 pm
[url=https://dapoxetine.fun/]super avanaful[/url]
Edgarlor · August 22, 2022 at 9:13 pm
[url=http://drugstore.today/]pharmacy delivery[/url]
JudyCounk · August 22, 2022 at 9:17 pm
[url=https://sildalis.click/]buy cheap sildalis[/url]
DarrylSef · August 22, 2022 at 9:27 pm
[url=http://glucophage.icu/]metformin 500 mg tablet price in india[/url] [url=http://inderal.site/]propranolol for sale online[/url] [url=http://antabuse.site/]antabuse coupon[/url] [url=http://seroquel.site/]seroquel brand[/url] [url=http://azithromycin.media/]azithromycin canada[/url] [url=http://budesonide.run/]budesonide 3mg capsules coupon[/url] [url=http://trazodone.fun/]trazodone price in india[/url]
Michaelemult · August 22, 2022 at 9:28 pm
[url=https://prednisolone.fun/]prednisolone 5 mg[/url]
NickCounk · August 22, 2022 at 9:29 pm
[url=https://malegra.fun/]buy malegra[/url]
WilliamWem · August 22, 2022 at 9:34 pm
[url=https://diflucan.xyz/]diflucan 150 mg online[/url] [url=https://finasteride.site/]finasteride online bonus[/url] [url=https://onlinepharmacy.media/]canada pharmacy online legit[/url] [url=https://trazodone.fun/]trazodone brand name usa[/url]
KimCounk · August 22, 2022 at 9:38 pm
[url=https://valacyclovir.site/]cost of valtrex in canada[/url]
Davidhup · August 22, 2022 at 9:50 pm
[url=https://trazodone.fun/]desyrel over the counter[/url]
JaneCounk · August 22, 2022 at 9:55 pm
[url=http://valacyclovir.site/]medicine valtrex[/url]
RodneyTab · August 22, 2022 at 9:57 pm
[url=http://cephalexin.icu/]cephalexin 250 mg coupon[/url]
Samuelraisk · August 22, 2022 at 10:18 pm
[url=https://prednisolone.fun/]cheap prednisolne[/url]
JudyCounk · August 22, 2022 at 10:21 pm
[url=https://viagraotabs.quest/]cost of sildenafil 20 mg[/url]
WilliamWem · August 22, 2022 at 10:34 pm
[url=https://augmentin.business/]amoxicillin 500mg canada[/url] [url=https://trental.xyz/]trental 400 mg tablet online india[/url] [url=https://allopurinol.xyz/]allopurinol 1000 mg[/url] [url=https://flagyl.site/]medicine flagyl[/url] [url=https://finasteride.site/]propecia mexico[/url] [url=https://levothyroxine.fun/]synthroid 50[/url]
RodneyTab · August 22, 2022 at 10:36 pm
[url=http://hydroxychloroquine.ink/]hydroxychloroquine 200 mg cost[/url]
Samuelraisk · August 22, 2022 at 10:39 pm
[url=https://avana.click/]avana india[/url]
IvyCounk · August 22, 2022 at 10:55 pm
[url=http://piroxicam.fun/]feldene gel usa[/url] [url=http://lisinopril.click/]cheap lisinopril no prescription[/url] [url=http://propecia.capetown/]how to get propecia nz[/url] [url=http://valtrex.fun/]valtrex prescription price[/url] [url=http://malegra.fun/]malegra canada[/url] [url=http://viagravtabs.monster/]how much is a viagra pill cost[/url]
NickCounk · August 22, 2022 at 10:58 pm
[url=https://accutane.wtf/]accutane where to get[/url]
MiclTek · August 22, 2022 at 11:17 pm
[url=http://albenza.icu/]buy albendazole online[/url]
MiclTek · August 22, 2022 at 11:21 pm
[url=http://vardenafil.network/]purchase levitra online canada[/url]
BooCounk · August 22, 2022 at 11:27 pm
[url=https://vardenafiltabs.com/]vardenafil 20 mg online[/url]
WimCounk · August 22, 2022 at 11:29 pm
[url=http://propranolol.boutique/]innopran xl coupon[/url]
JoeCounk · August 23, 2022 at 12:18 am
[url=https://doxycycline.network/]can you buy doxycycline over the counter in canada[/url] [url=https://budesonide.site/]budecort 200[/url]
RichardFaply · August 23, 2022 at 12:23 am
[url=http://hydroxyzine.fun/]atarax pills[/url] [url=http://yasmin.monster/]yasmin pill cost[/url] [url=http://augmentin.business/]amoxicillin prescription online[/url] [url=http://fildena.fun/]where to buy fildena[/url] [url=http://onlinepharmacy.win/]prescription free canadian pharmacy[/url] [url=http://seroquel.fun/]seroquel 300 pill[/url]
AmyCounk · August 23, 2022 at 12:25 am
[url=https://albuterol.fun/]combivent 250 mg[/url]
AshCounk · August 23, 2022 at 12:31 am
[url=https://triamterenedyrenium.monster/]triamterene hctz 37.5 25[/url] [url=https://medroltabs.online/]solu medrol[/url] [url=https://neurontin.shop/]gabapentin 200 mg tablets[/url] [url=https://strattera.guru/]strattera 20mg[/url] [url=https://tadacip24.com/]tadacip cost[/url] [url=https://gabapentin.golf/]gabapentin 1200[/url]
BooCounk · August 23, 2022 at 12:38 am
[url=https://estrace.live/]estrace price uk[/url]
Samuelraisk · August 23, 2022 at 12:42 am
[url=https://glucophage.site/]glucophage 1000 mg uk[/url]
Davidhup · August 23, 2022 at 12:52 am
[url=https://drugstore.today/]online pharmacy in turkey[/url]
MiclTek · August 23, 2022 at 12:55 am
[url=http://onlinepharmacy.win/]legit canadian pharmacy[/url]
Edgarlor · August 23, 2022 at 12:57 am
[url=http://flagyl.site/]metronidazole 500 mg[/url]
TimothyThive · August 23, 2022 at 1:01 am
[url=http://trazodone.fun/]generic trazodone 100 mg[/url]
Samuelraisk · August 23, 2022 at 1:06 am
[url=https://trental.xyz/]trental 400 mg buy online[/url]
RichardFaply · August 23, 2022 at 1:29 am
[url=http://albenza.icu/]albendazole tablet 400 mg[/url] [url=http://dapoxetine.fun/]dapoxetine price in india[/url] [url=http://suhagra.fun/]buy suhagra 50mg online[/url] [url=http://diflucan.xyz/]diflucan pill price[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide brand australia[/url] [url=http://augmentin.business/]where can i get amoxicillin 500 mg[/url] [url=http://vermox.fun/]vermox us[/url] [url=http://antabuse.site/]disulfiram tablets price[/url]
LisaCounk · August 23, 2022 at 1:37 am
[url=https://levofloxacin.site/]levaquin pill[/url]
MichaelGuabe · August 23, 2022 at 1:38 am
[url=http://seroquel.fun/]cost for seroquel[/url]
Davidhup · August 23, 2022 at 1:40 am
[url=https://provigil.life/]buy provigil online[/url]
KiaCounk · August 23, 2022 at 1:42 am
[url=http://onlinepharmacy.run/]online pharmacy 365[/url]
MiclTek · August 23, 2022 at 1:45 am
[url=http://albenza.icu/]albendazole in usa[/url]
IvyCounk · August 23, 2022 at 2:05 am
[url=http://zestoretic.fun/]zestoretic online[/url] [url=http://onlinepharmacy.run/]pharmacy in canada for viagra[/url] [url=http://hydroxychloroquine.business/]plaquenil 2 mg[/url]
Samuelraisk · August 23, 2022 at 2:12 am
[url=https://kamagra.fun/]kamagra pills online[/url]
JoeCounk · August 23, 2022 at 2:15 am
[url=https://doxycycline.network/]doxycycline 100mg tabs[/url] [url=https://levitra.sbs/]compare levitra prices[/url] [url=https://fluoxetine.fun/]where to buy prozac online[/url]
DenCounk · August 23, 2022 at 2:21 am
[url=http://modafinil.durban/]provigil 100mg[/url]
LisaCounk · August 23, 2022 at 2:21 am
[url=https://cymbalta.site/]cymbalta 60 mg cost canada[/url]
AshCounk · August 23, 2022 at 2:22 am
[url=https://tenormin.store/]tenormin 100[/url] [url=https://triamterene.live/]triamterene brand name in india[/url] [url=https://lexaprotabs.online/]lexapro 1 mg[/url] [url=https://albenza.boutique/]albenza 200[/url]
AmyCounk · August 23, 2022 at 2:34 am
[url=https://levofloxacin.site/]antibiotics levaquin[/url]
IvyCounk · August 23, 2022 at 2:49 am
[url=http://viagravtabs.monster/]viagra 10 pills[/url] [url=http://malegra.fun/]malegra 100[/url] [url=http://diflucan.sbs/]diflucan 1 where to buy[/url] [url=http://propecia.capetown/]propeciaoffers.com[/url] [url=http://valacyclovir.site/]valtrex pills where to buy[/url] [url=http://celexa.cfd/]celexa pills[/url] [url=http://levofloxacin.life/]antibiotics levaquin[/url]
DavisMug · August 23, 2022 at 2:50 am
[url=http://albenza.business/]buy albendazole australia[/url]
JaneCounk · August 23, 2022 at 2:56 am
[url=http://atomoxetine.sbs/]strattera 100 mg[/url]
RobertFoold · August 23, 2022 at 3:02 am
[url=https://provigil.life/]generic modafinil india[/url]
Curtisvibia · August 23, 2022 at 3:06 am
[url=https://trental.xyz/]trental 400 mg tablet price[/url]
AshCounk · August 23, 2022 at 3:07 am
[url=https://diflucan.email/]how to buy diflucan[/url] [url=https://zofran.works/]generic zofran online[/url] [url=https://robaxin.store/]robaxin over the counter usa[/url] [url=https://avodart2.com/]buy avodart canada[/url] [url=https://zoloft.golf/]zoloft 20[/url] [url=https://retinoa.shop/]retino cream[/url]
MichaelDwego · August 23, 2022 at 3:12 am
[url=https://hydroxyzine.fun/]atarax tablet price in india[/url]
YonCounk · August 23, 2022 at 3:21 am
[url=http://budesonide.site/]budesonide 3 mg capsule cost[/url]
MarvinZem · August 23, 2022 at 3:27 am
[url=https://fildena.fun/]cheap fildena[/url]
JimCounk · August 23, 2022 at 3:33 am
[url=https://ampicillin.site/]ampicillin price[/url]
Michaelemult · August 23, 2022 at 3:34 am
[url=https://diflucan.xyz/]fluconazole 150mg order[/url]
Curtisvibia · August 23, 2022 at 3:35 am
[url=https://drugstore.today/]online pharmacy dubai[/url]
AmyCounk · August 23, 2022 at 3:42 am
[url=https://hydroxychloroquine.business/]plaquenil 300[/url]
SueCounk · August 23, 2022 at 3:58 am
[url=http://methocarbamol.site/]robaxin canada[/url]
DavisMug · August 23, 2022 at 4:02 am
[url=http://tamoxifen.fun/]tamoxifen 100 mg[/url]
TommyHepsy · August 23, 2022 at 4:07 am
[url=https://fildena.fun/]fildena 100 mg online[/url]
JackCounk · August 23, 2022 at 4:20 am
[url=https://methocarbamol.site/]robaxin[/url]
MarkCounk · August 23, 2022 at 4:23 am
[url=https://piroxicam.fun/]feldene over the counter[/url]
EvaCounk · August 23, 2022 at 4:27 am
[url=https://orlistat.fun/]xenical 120 mg buy online uk[/url]
Curtisvibia · August 23, 2022 at 4:35 am
[url=https://seroquel.site/]buy seroquel[/url]
Edgarlor · August 23, 2022 at 4:39 am
[url=http://proscar.site/]how can i get propecia prescription[/url]
RichardFaply · August 23, 2022 at 4:39 am
[url=http://fildena.fun/]fildena 100[/url] [url=http://kamagra.fun/]kamagra prescription[/url] [url=http://glucophage.site/]metformin 19.99[/url] [url=http://estrace.fun/]estrace 1[/url]
KiaCounk · August 23, 2022 at 4:50 am
[url=http://levofloxacin.life/]levaquin 750[/url]
Curtisvibia · August 23, 2022 at 5:06 am
[url=https://prednisolone.fun/]25mg prednisolone[/url]
JasonCounk · August 23, 2022 at 5:09 am
[url=http://valtrex.fun/]valtrex usa[/url]
KimCounk · August 23, 2022 at 5:13 am
[url=https://dutasteride.fun/]avodart soft capsules[/url]
WilliamWem · August 23, 2022 at 5:23 am
[url=https://augmentin.business/]where can i buy amoxicillin without prec[/url] [url=https://levothyroxine.fun/]synthroid 100[/url] [url=https://hydrochlorothiazide.cfd/]zestoretic cost[/url]
ZakCounk · August 23, 2022 at 5:24 am
[url=http://methocarbamol.site/]robaxin online canada[/url] [url=http://fluoxetine.life/]where to order prozac without prescription[/url]
JimCounk · August 23, 2022 at 5:39 am
[url=https://nexium.cfd/]nexium 40 mg coupon[/url]
TeoCounk · August 23, 2022 at 5:43 am
[url=http://atomoxetine.sbs/]strattera 60[/url]
JaneCounk · August 23, 2022 at 5:46 am
[url=http://hydroxychloroquine.business/]plaquenil 100mg[/url]
JosephMaict · August 23, 2022 at 5:53 am
[url=http://onlinepharmacy.download/]online pharmacy ed[/url] [url=http://glucophage.site/]metformin over the counter uk[/url] [url=http://trazodone.fun/]buy trazodone[/url]
MiclTek · August 23, 2022 at 6:07 am
[url=http://prednisolone.fun/]buying prednisolone online[/url]
KiaCounk · August 23, 2022 at 6:09 am
[url=http://dexamethasone.site/]dexamethasone 0.5 tablet price[/url]
Davidhup · August 23, 2022 at 6:19 am
[url=https://vermox.fun/]vermox purchase[/url]
DarrylSef · August 23, 2022 at 6:22 am
[url=http://levothyroxine.xyz/]synthroid 100 mcg cost[/url] [url=http://dapoxetine.fun/]dapoxetine medicine[/url] [url=http://triamterene.cfd/]triamterene 50 mg[/url] [url=http://diflucan.xyz/]diflucan 150 mg prescription[/url]
Michaeldrist · August 23, 2022 at 6:24 am
[url=http://zanaflex.site/]tizanidine capsules[/url]
PaulCounk · August 23, 2022 at 6:33 am
[url=https://levofloxacin.site/]levaquin 500[/url]
UgoCounk · August 23, 2022 at 6:34 am
[url=http://zofran.guru/]where can you buy zofran[/url]
AlanCounk · August 23, 2022 at 6:35 am
[url=https://albuterol.fun/]ventolin uk[/url] [url=https://dexamethasone.site/]dexamethasone cream over the counter[/url] [url=https://fluoxetine.life/]otc prozac[/url] [url=https://sildalis.fun/]sildalis 120 mg[/url] [url=https://hydroxychloroquine.business/]quineprox 800 mg[/url]
JackCounk · August 23, 2022 at 6:38 am
[url=https://hydroxychloroquine.business/]hydroxychloroquine sulfate generic[/url]
JoeCounk · August 23, 2022 at 7:10 am
[url=https://methocarbamol.site/]robaxin online canada[/url] [url=https://sildalis.fun/]canadian pharmacy sildalis[/url] [url=https://silagra.site/]buy silagra online[/url] [url=https://viagra.monster/]purchase viagra 100mg[/url]
MiclTek · August 23, 2022 at 7:16 am
[url=http://inderal.site/]propranolol 10 mg tablet[/url]
WilliamWem · August 23, 2022 at 7:19 am
[url=https://finasteride.site/]how to get propecia pill[/url] [url=https://levothyroxine.xyz/]price of synthroid 75 mcg[/url] [url=https://sildenafil.site/]viagra pfizer price[/url] [url=https://inderal.site/]buy propranolol online usa[/url] [url=https://hydroxychloroquine.ink/]plaquenil 2016[/url] [url=https://provigil.life/]modafinil 20mg[/url]
DenCounk · August 23, 2022 at 7:37 am
[url=http://orlistat.life/]can i buy xenical online[/url]
LisaCounk · August 23, 2022 at 7:38 am
[url=https://viagrahtabs.quest/]viagra pills price in usa[/url]
MichaelGuabe · August 23, 2022 at 7:44 am
[url=http://hydroxyzine.fun/]order atarax online[/url]
BooCounk · August 23, 2022 at 7:49 am
[url=https://cialisotabs.monster/]buy generic cialis online from india[/url]
Davidhup · August 23, 2022 at 7:58 am
[url=https://onlinepharmacy.download/]northwest pharmacy canada[/url]
JosephMaict · August 23, 2022 at 8:02 am
[url=http://onlinepharmacy.win/]pharmacy online 365 discount code[/url] [url=http://prozac.media/]fluoxetine 10mg tablets cost[/url] [url=http://allopurinol.icu/]allopurinol 600 mg[/url] [url=http://levothyroxine.fun/]synthroid 50 mcg price[/url] [url=http://dapoxetine.fun/]dapoxetine tablets buy online[/url] [url=http://hydroxychloroquine.makeup/]plaquenil 50mg[/url]
NickCounk · August 23, 2022 at 8:06 am
[url=https://zestoretic.fun/]zestoretic online[/url]
DavisMug · August 23, 2022 at 8:08 am
[url=http://prednisolone.fun/]3 mg prednisolone pill[/url]
JaneCounk · August 23, 2022 at 8:09 am
[url=http://valacyclovir.site/]medicine valtrex[/url]
ZakCounk · August 23, 2022 at 8:12 am
[url=http://modafinil.run/]modafinil fast shipping[/url] [url=http://sildalis.fun/]discount sildalis[/url] [url=http://levofloxacin.life/]levaquin generic[/url] [url=http://dexamethasone.site/]dexamethasone cost usa[/url] [url=http://valtrex.fun/]can i buy valtrex over the counter[/url]
DavisMug · August 23, 2022 at 8:17 am
[url=http://estrace.fun/]estrace[/url]
KiaCounk · August 23, 2022 at 8:20 am
[url=http://levofloxacin.site/]levaquin without prescription[/url]
ElwoodGon · August 23, 2022 at 8:31 am
[url=http://augmentin.business/]amoxicillin 500mg capsules price in india[/url]
MarkCounk · August 23, 2022 at 9:01 am
[url=https://albuterol.fun/]combivent buy[/url]
IvyCounk · August 23, 2022 at 9:01 am
[url=http://albuterol.fun/]ventolin coupon[/url] [url=http://sildalis.click/]where to buy sildalis[/url] [url=http://lisinopril.site/]zestril 25 mg[/url] [url=http://nexium.cfd/]generic for nexium[/url] [url=http://tadacip.xyz/]tadacip 20mg[/url] [url=http://cymbalta.site/]cymbalta without prescription[/url]
RodneyTab · August 23, 2022 at 9:04 am
[url=http://yasmin.monster/]yasmin online australia[/url]
RodneyTab · August 23, 2022 at 9:13 am
[url=http://onlinepharmacy.win/]generic pharmacy online[/url]
ElwoodGon · August 23, 2022 at 9:15 am
[url=http://vardenafil.network/]buy levitra online india[/url]
PaulCounk · August 23, 2022 at 9:21 am
[url=https://onlinepharmacy.run/]best online pharmacy no prescription[/url]
MarvinZem · August 23, 2022 at 9:27 am
[url=https://onlinepharmacy.download/]hq pharmacy online 365[/url]
DavisMug · August 23, 2022 at 9:36 am
[url=http://seroquel.fun/]seroquel online buy[/url]
TeoCounk · August 23, 2022 at 9:42 am
[url=http://modafinil.durban/]modafinil 100mg cost[/url]
JackCounk · August 23, 2022 at 10:02 am
[url=https://atomoxetine.sbs/]strattera online purchase[/url]
DarrylSef · August 23, 2022 at 10:10 am
[url=http://hydroxychloroquine.ink/]where to buy cheap plaquenil[/url] [url=http://allopurinol.xyz/]buy cheap allopurinol[/url] [url=http://budesonide.run/]budesonide price canada[/url] [url=http://flagyl.site/]flagyl 500 mg[/url]
WimCounk · August 23, 2022 at 10:14 am
[url=http://ampicillin.digital/]ampicillin medication[/url]
MiaCounk · August 23, 2022 at 10:21 am
[url=http://valacyclovir.site/]valtrex pills where to buy[/url]
Michaelemult · August 23, 2022 at 10:28 am
[url=https://finasteride.site/]finasteride brand name[/url]
EyeCounk · August 23, 2022 at 10:29 am
[url=http://accutane.click/]order accutane canada[/url] [url=http://cialiswtabs.monster/]order cialis online us pharmacy[/url] [url=http://zovirax.fun/]zovirax cream rx[/url]
NickCounk · August 23, 2022 at 10:38 am
[url=https://viagrahtabs.quest/]how to get viagra without a prescription[/url]
ElwoodGon · August 23, 2022 at 10:38 am
[url=http://zanaflex.site/]buy zanaflex 4mg[/url]
UgoCounk · August 23, 2022 at 10:50 am
[url=http://orlistat.guru/]orlistat brand name[/url]
JimCounk · August 23, 2022 at 10:50 am
[url=https://albuterol.fun/]albuterol 100[/url]
RichardFaply · August 23, 2022 at 10:54 am
[url=http://zanaflex.site/]how much is tizanidine cost[/url] [url=http://inderal.site/]propranolol 80 mg price[/url] [url=http://diflucan.xyz/]buy fluconazole[/url] [url=http://allopurinol.xyz/]allopurinol canadian pharmacy[/url]
TedCounk · August 23, 2022 at 10:56 am
[url=http://mebendazole.site/]vermox over the counter usa[/url]
JudyCounk · August 23, 2022 at 10:59 am
[url=https://doxycycline.network/]online doxycycline prescription[/url]
AnnaCounk · August 23, 2022 at 11:06 am
[url=https://malegra.fun/]malegra dxt online[/url]
DarrylSef · August 23, 2022 at 11:07 am
[url=http://augmentin.business/]amoxicillin tablets over the counter[/url] [url=http://antabuse.site/]antabuse australia[/url] [url=http://onlinepharmacy.download/]www pharmacyonline[/url]
Samuelraisk · August 23, 2022 at 11:07 am
[url=https://prednisolone.fun/]buying prednisolone online[/url]
TedCounk · August 23, 2022 at 11:19 am
[url=http://viagra.monster/]real viagra uk[/url]
DarrylSef · August 23, 2022 at 11:24 am
[url=http://onlinepharmacy.media/]canadian pharmacy online store[/url] [url=http://antabuse.site/]disulfiram purchase[/url] [url=http://fildena.fun/]fildena 100[/url]
Samuelraisk · August 23, 2022 at 11:31 am
[url=https://zanaflex.site/]buy tizanidine online[/url]
DarrylSef · August 23, 2022 at 11:33 am
[url=http://dapoxetine.fun/]dapoxetine 60 mg price in india[/url] [url=http://proscar.site/]buy generic propecia in australia[/url] [url=http://kamagra.fun/]kamagra oral jelly best price uk[/url] [url=http://levothyroxine.xyz/]synthroid order[/url] [url=http://trental.xyz/]trental[/url]
ElwoodGon · August 23, 2022 at 11:37 am
[url=http://cialiswtab.quest/]cialis no rx[/url]
AnnaCounk · August 23, 2022 at 11:42 am
[url=https://viagravtabs.monster/]otc viagra[/url]
IvyCounk · August 23, 2022 at 11:44 am
[url=http://sildalis.fun/]sildalis for sale[/url] [url=http://mebendazole.site/]vermox tablets where to buy[/url]
IvyCounk · August 23, 2022 at 12:00 pm
[url=http://modafinil.run/]buy modafinil online[/url] [url=http://ventolin.click/]albuterol rx coupon[/url]
ElwoodGon · August 23, 2022 at 12:06 pm
[url=http://vermox.fun/]vermox in usa[/url]
Estebanguall · August 23, 2022 at 12:07 pm
[url=https://suhagra.fun/]buy suhagra 25 mg[/url]
BooCounk · August 23, 2022 at 12:08 pm
[url=https://buysuhagra.shop/]suhagra 50 price[/url]
AnnaCounk · August 23, 2022 at 12:13 pm
[url=https://tadacip.xyz/]where to buy tadacip 20[/url]
ZakCounk · August 23, 2022 at 12:23 pm
[url=http://celexa.cfd/]citalopram hydrobromide 40mg[/url] [url=http://doxycycline.network/]doxycycline best price[/url] [url=http://hydroxychloroquine.business/]hydroxychloroquine 800 mg[/url] [url=http://modafinil.durban/]where to order modafinil online[/url] [url=http://diclofenac.fun/]voltaren 5mg[/url]
JimCounk · August 23, 2022 at 12:28 pm
[url=https://celexa.cfd/]citalopram 20mg tablets[/url]
JosephMaict · August 23, 2022 at 12:49 pm
[url=http://yasmin.monster/]generic yasmin cost[/url] [url=http://provigil.life/]modafinil tablet price in india[/url] [url=http://zanaflex.site/]zanaflex 4mg tablet price[/url] [url=http://onlinepharmacy.media/]no rx needed pharmacy[/url] [url=http://glucophage.icu/]generic metformin 10 mg tablet[/url] [url=http://albenza.business/]albendazole tablets buy online[/url] [url=http://kamagra.fun/]kamagra oral jelly online[/url]
AshCounk · August 23, 2022 at 12:53 pm
[url=https://avodart.cfd/]avodart .5 mg[/url] [url=https://cipro.agency/]cipro 500mg india[/url] [url=https://zofran.guru/]price of zofran tablets[/url] [url=https://tretinoin.sale/]cost of retin-a[/url] [url=https://modafinilmedicine.com/]cost of provigil 2018[/url] [url=https://erythromycin.store/]erythromycin 2 gel[/url] [url=https://augmentin.shop/]antibiotic augmentin[/url]
DavisMug · August 23, 2022 at 12:57 pm
[url=http://proscar.site/]propecia prices in canada[/url]
TommyHepsy · August 23, 2022 at 1:05 pm
[url=https://inderal.site/]propranolol 20 mg tablet[/url]
Estebanguall · August 23, 2022 at 1:22 pm
[url=https://onlinepharmacy.win/]best australian online pharmacy[/url]
SueCounk · August 23, 2022 at 1:23 pm
[url=http://modafinil.durban/]where can you buy modafinil over the counter[/url]
Jameseloro · August 23, 2022 at 1:29 pm
[url=https://finasteride.site/]propecia mexico[/url] [url=https://avana.click/]dapoxetine generic uk[/url] [url=https://trazodone.icu/]trazodone tablets[/url] [url=https://onlinepharmacy.media/]online pharmacy pain relief[/url] [url=https://tamoxifen.fun/]nolvadex tablets online[/url] [url=https://estrace.fun/]estrace price uk[/url] [url=https://fildena.fun/]fildena 25[/url] [url=https://prozac.media/]generic prozac online[/url]
Davidhup · August 23, 2022 at 1:39 pm
[url=https://antabuse.site/]generic antabuse cost[/url]
JackCounk · August 23, 2022 at 1:54 pm
[url=https://tadacip.xyz/]tadacip india price[/url]
ZakCounk · August 23, 2022 at 2:01 pm
[url=http://accutane.wtf/]accutane in india[/url] [url=http://dutasteride.fun/]avodart price south africa[/url]
MiaCounk · August 23, 2022 at 2:03 pm
[url=http://cialiswtabs.monster/]cialis cost in india[/url]
JimCounk · August 23, 2022 at 2:10 pm
[url=https://viagrahtabs.quest/]buy female viagra nz[/url]
BooCounk · August 23, 2022 at 2:15 pm
[url=https://accutane.boutique/]order accutane no prescription[/url]
RobertFoold · August 23, 2022 at 2:22 pm
[url=https://dapoxetine.fun/]priligy canada pharmacy[/url]
EvaCounk · August 23, 2022 at 2:26 pm
[url=https://zovirax.fun/]acyclovir 800 mg price india[/url]
Samuelraisk · August 23, 2022 at 2:27 pm
[url=https://vardenafil.network/]vardenafil 20mg cost[/url]
PaulCounk · August 23, 2022 at 2:36 pm
[url=https://fluoxetine.fun/]fluoxetine singapore[/url]
DavisMug · August 23, 2022 at 2:48 pm
[url=http://seroquel.site/]cost of seroquel[/url]
Samuelraisk · August 23, 2022 at 2:52 pm
[url=https://azithromycin.media/]azithromycin otc uk[/url]
MaryCounk · August 23, 2022 at 2:55 pm
[url=https://lasix.wtf/]furosemide tab 20mg cost[/url] [url=https://sildalis.click/]sildalis tablets[/url] [url=https://diflucan.sbs/]diflucan medication[/url] [url=https://silagra.site/]silagra 50 mg[/url] [url=https://zestoretic.fun/]zestoretic coupon[/url]
MichaelDwego · August 23, 2022 at 3:02 pm
[url=https://dapoxetine.fun/]where to buy priligy in canada[/url]
Curtisvibia · August 23, 2022 at 3:08 pm
[url=https://yasmin.monster/]order yasmin[/url]
TeoCounk · August 23, 2022 at 3:16 pm
[url=http://lisinopril.site/]rx lisinopril 10mg[/url]
JaneCounk · August 23, 2022 at 3:19 pm
[url=http://viagravtabs.monster/]viagra for sale in australia[/url]
WimCounk · August 23, 2022 at 3:19 pm
[url=http://valtrex.store/]valtrex otc[/url]
PaulCounk · August 23, 2022 at 3:24 pm
[url=https://diflucan.sbs/]where to buy diflucan without prescription[/url]
MarkCounk · August 23, 2022 at 3:25 pm
[url=https://sildalis.fun/]buy sildalis[/url]
CarlCounk · August 23, 2022 at 3:29 pm
[url=https://diflucan.sbs/]diflucan tabs[/url]
CarlCounk · August 23, 2022 at 3:35 pm
[url=https://atomoxetine.sbs/]strattera over the counter[/url]
JudyCounk · August 23, 2022 at 3:37 pm
[url=https://accutane.click/]accutane cheapest price[/url]
JackCounk · August 23, 2022 at 3:40 pm
[url=https://levofloxacin.life/]levaquin[/url]
Estebanguall · August 23, 2022 at 3:41 pm
[url=https://levothyroxine.fun/]synthroid 88 price[/url]
Samuelraisk · August 23, 2022 at 3:41 pm
[url=https://prednisolone.fun/]prednisolone[/url]
Davidhup · August 23, 2022 at 3:51 pm
[url=https://fildena.fun/]fildena 200[/url]
JimCounk · August 23, 2022 at 4:09 pm
[url=https://cialiswtabs.monster/]rx cialis canada[/url]
MiclTek · August 23, 2022 at 4:25 pm
[url=http://augmentin.business/]augmentin 625 mg in usa[/url]
MarvinZem · August 23, 2022 at 4:29 pm
[url=https://glucophage.site/]metformin 2[/url]
DavisMug · August 23, 2022 at 4:43 pm
[url=http://retinoa.xyz/]retino 0.25[/url]
AmyCounk · August 23, 2022 at 4:50 pm
[url=https://valacyclovir.site/]valtrex generic purchase[/url]
KimCounk · August 23, 2022 at 4:51 pm
[url=https://albuterol.fun/]albuterol purchase without prescription[/url]
TeoCounk · August 23, 2022 at 5:08 pm
[url=http://zestoretic.fun/]zestoretic 20 12.5 mg[/url]
ZakCounk · August 23, 2022 at 5:15 pm
[url=http://sildalis.click/]sildalis[/url] [url=http://mebendazole.site/]buy vermox online usa[/url] [url=http://levitra.sbs/]levitra uk pharmacy[/url] [url=http://fluoxetine.life/]fluoxetine10mg[/url] [url=http://valacyclovir.site/]generic valtrex online pharmacy[/url]
AnnaCounk · August 23, 2022 at 5:22 pm
[url=https://orlistat.life/]orlistat prescription[/url]
TedCounk · August 23, 2022 at 5:31 pm
[url=http://propecia.capetown/]propeciaoffers.com[/url]
Davidhup · August 23, 2022 at 5:37 pm
[url=https://augmentin.business/]how to get amoxicillin[/url]
SamCounk · August 23, 2022 at 5:56 pm
[url=https://diflucan.sbs/]diflucan online purchase uk[/url] [url=https://atomoxetine.sbs/]canada generic strattera[/url]
TedCounk · August 23, 2022 at 5:57 pm
[url=http://piroxicam.fun/]piroxicam 10mg cost[/url]
TeoCounk · August 23, 2022 at 6:04 pm
[url=http://viagraotabs.quest/]generic viagra brands[/url]
JasonCounk · August 23, 2022 at 6:12 pm
[url=http://ventolin.fun/]albuterol 5 mg[/url]
EvaCounk · August 23, 2022 at 6:33 pm
[url=https://doxycycline.network/]buy doxycycline monohydrate[/url]
MichaelGuabe · August 23, 2022 at 6:34 pm
[url=http://budesonide.run/]budesonide 9 mg tablets in india[/url]
Edgarlor · August 23, 2022 at 6:53 pm
[url=http://cialiswtab.quest/]cheap cialis 5mg[/url]
MiclTek · August 23, 2022 at 6:57 pm
[url=http://trazodone.icu/]trazodone 50 mg brand name[/url]
Michaelemult · August 23, 2022 at 6:59 pm
[url=https://dapoxetine.fun/]priligy dapoxetine[/url]
RicIsose · August 23, 2022 at 7:04 pm
[url=https://levothyroxine.fun/]synthroid 88 mcg cost[/url] [url=https://hydroxyzine.fun/]buy atarax 25mg[/url] [url=https://albenza.icu/]albendazole 400mg[/url] [url=https://finasteride.site/]finasteride price in india[/url] [url=https://antabuse.site/]disulfiram tablets price[/url] [url=https://allopurinol.xyz/]allopurinol 300 mg price[/url] [url=https://drugstore.today/]pharmacy delivery[/url] [url=https://zanaflex.site/]zanaflex 2 mg[/url]
DenCounk · August 23, 2022 at 7:07 pm
[url=http://lasix.wtf/]lasix 25 mg[/url]
ElwoodGon · August 23, 2022 at 7:09 pm
[url=http://allopurinol.xyz/]buy allopurinol online[/url]
CarlCounk · August 23, 2022 at 7:50 pm
[url=https://valtrex.fun/]canadian valtrex otc[/url]
BooCounk · August 23, 2022 at 7:52 pm
[url=https://buyazithromycin.guru/]azithromycin buy[/url]
ElwoodGon · August 23, 2022 at 7:54 pm
[url=http://retinoa.xyz/]retino 0.05 price[/url]
LisaCounk · August 23, 2022 at 8:09 pm
[url=https://valtrex.fun/]can i buy valtrex over the counter[/url]
MiclTek · August 23, 2022 at 8:24 pm
[url=http://prednisolone.fun/]rx from canada prednisolone[/url]
WimCounk · August 23, 2022 at 8:28 pm
[url=http://robaxin.shop/]robaxin generic south africa[/url]
CarlCounk · August 23, 2022 at 8:29 pm
[url=https://doxycycline.network/]buy doxycycline online 270 tabs[/url]
Estebanguall · August 23, 2022 at 8:35 pm
[url=https://onlinepharmacy.media/]canadianpharmacymeds com[/url]
Charlesaduse · August 23, 2022 at 8:38 pm
[url=http://glucophage.site/]metformin pharmacy price[/url]
RobertFoold · August 23, 2022 at 8:39 pm
[url=https://zanaflex.site/]zanaflex generic price[/url]
DarrylSef · August 23, 2022 at 8:43 pm
[url=http://trazodone.fun/]buy trazodone 150 mg[/url] [url=http://azithromycin.media/]how much is zithromax[/url] [url=http://hydroxychloroquine.ink/]plaquenil headache[/url] [url=http://trental.xyz/]trental generic[/url] [url=http://drugstore.today/]pharmacy order online[/url]
IvyCounk · August 23, 2022 at 9:01 pm
[url=http://atomoxetine.sbs/]cost of strattera tablets[/url] [url=http://viagrahtabs.quest/]how much is viagra in usa[/url] [url=http://fluoxetine.life/]prozac online buy[/url] [url=http://viagra.monster/]brand viagra price[/url] [url=http://levofloxacin.life/]levaquin price[/url] [url=http://albuterol.fun/]albuterol canada pharmacy[/url] [url=http://malegra.fun/]malegra dxt[/url]
RicIsose · August 23, 2022 at 9:08 pm
[url=https://trazodone.fun/]trazodone 50mg capsules[/url] [url=https://vardenafil.network/]vardenafil pills india[/url] [url=https://cialiswtab.quest/]cialis brand name[/url] [url=https://inderal.site/]propranolol 25 mg[/url] [url=https://allopurinol.xyz/]allopurinol oral[/url] [url=https://prozac.media/]fluoxetine 10mg tablets australia[/url] [url=https://provigil.life/]buy provigil online[/url] [url=https://hydrochlorothiazide.cfd/]zestoretic 20 25mg[/url]
UgoCounk · August 23, 2022 at 9:11 pm
[url=http://diflucanx.online/]diflucan medicine online[/url]
MaryCounk · August 23, 2022 at 9:12 pm
[url=https://fluoxetine.fun/]prozac 20 mg tablet[/url] [url=https://accutane.wtf/]accutane buy india[/url] [url=https://nexium.cfd/]can you buy 40 mg nexium over the counter[/url] [url=https://clopidogrel.site/]plavix tablet[/url] [url=https://modafinil.durban/]modafinil price australia[/url] [url=https://zovirax.fun/]buy acyclovir 800 mg[/url] [url=https://dutasteride.fun/]avodart prescription online[/url] [url=https://zestoretic.fun/]zestoretic cost[/url]
JosephMaict · August 23, 2022 at 9:14 pm
[url=http://finasteride.site/]propecia from canada[/url] [url=http://albenza.business/]albenza 200 mg price[/url] [url=http://tamoxifen.fun/]cost of tamoxifen 10 mg tablet[/url] [url=http://trazodone.fun/]trazodone hydrochloride 100mg[/url] [url=http://dapoxetine.fun/]avana 200 mg[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide no prescription[/url] [url=http://onlinepharmacy.media/]canadian pharmacy com[/url] [url=http://cephalexin.icu/]price for keflex 500mg[/url]
NickCounk · August 23, 2022 at 9:18 pm
[url=https://ventolin.fun/]where can i get albuterol over the counter[/url]
DenCounk · August 23, 2022 at 9:25 pm
[url=http://orlistat.life/]how to get xenical prescription[/url]
Charlesaduse · August 23, 2022 at 9:30 pm
[url=http://glucophage.icu/]metformin medicine price[/url]
Davidhup · August 23, 2022 at 9:31 pm
[url=https://azithromycin.media/]azithromycin online pharmacy uk[/url]
Edgarlor · August 23, 2022 at 9:53 pm
[url=http://prozac.media/]how to get prozac uk[/url]
JimCounk · August 23, 2022 at 9:53 pm
[url=https://onlinepharmacy.run/]best online pharmacy reddit[/url]
MichaelGuabe · August 23, 2022 at 9:55 pm
[url=http://prozac.media/]fluoxetine price[/url]
DarrylSef · August 23, 2022 at 10:06 pm
[url=http://onlinepharmacy.win/]best rogue online pharmacy[/url] [url=http://vardenafil.network/]generic levitra in us[/url] [url=http://augmentin.business/]buy amoxicillin 500mg online[/url]
MarkCounk · August 23, 2022 at 10:15 pm
[url=https://tadacip.xyz/]tadacip 20 for sale[/url]
MiclTek · August 23, 2022 at 10:24 pm
[url=http://proscar.site/]propecia 1mg tablets uk[/url]
MiaCounk · August 23, 2022 at 10:25 pm
[url=http://levitra.sbs/]levitra medicine online[/url]
TeoCounk · August 23, 2022 at 10:53 pm
[url=http://viagraotabs.quest/]how to buy viagra usa[/url]
MaryCounk · August 23, 2022 at 11:02 pm
[url=https://ventolin.click/]ventolin inhalador[/url] [url=https://cymbalta.site/]cymbalta generic usa[/url] [url=https://hydroxychloroquine.business/]hydroxychloroquine 100 mg tablet[/url] [url=https://silagra.site/]silagra 100mg tablets[/url]
SueCounk · August 23, 2022 at 11:18 pm
[url=http://cialiswtabs.monster/]cialis tablet price[/url]
AlanCounk · August 23, 2022 at 11:24 pm
[url=https://sildalis.fun/]sildalis in india[/url] [url=https://piroxicam.fun/]feldene 10 mg[/url] [url=https://sildalis.click/]buy cheap sildalis[/url] [url=https://hydroxychloroquine.business/]plaquenil generic 200 mg coupon[/url] [url=https://accutane.click/]order accutane from canada[/url] [url=https://onlinepharmacy.run/]best rated canadian pharmacy[/url]
DavisMug · August 23, 2022 at 11:28 pm
[url=http://diflucan.xyz/]diflucan otc[/url]
MichaelGuabe · August 23, 2022 at 11:35 pm
[url=http://allopurinol.icu/]allopurinol 100mg prices[/url]
MarkCounk · August 23, 2022 at 11:36 pm
[url=https://modafinil.run/]modafinil purchase canada[/url]
SamCounk · August 23, 2022 at 11:37 pm
[url=https://diflucan.sbs/]diflucan 200 mg pill[/url] [url=https://doxycycline.network/]doxycycline 100mg india[/url] [url=https://silagra.site/]buy silagra online uk[/url] [url=https://clopidogrel.site/]plavix generic 75 mg[/url] [url=https://viagra.monster/]sildenafil daily use[/url] [url=https://levitra.sbs/]where to get levitra[/url] [url=https://zestoretic.fun/]zestoretic 10 12.5[/url] [url=https://methocarbamol.site/]where to buy robaxin[/url]
JudyCounk · August 23, 2022 at 11:46 pm
[url=https://zestoretic.fun/]zestoretic medication[/url]
MichaelDwego · August 24, 2022 at 12:00 am
[url=https://cephalexin.icu/]keflex 200 mg[/url]
Charlesaduse · August 24, 2022 at 12:07 am
[url=http://proscar.site/]finasteride brand name[/url]
TedCounk · August 24, 2022 at 12:11 am
[url=http://piroxicam.fun/]feldene 0.5 gel[/url]
MichaelDwego · August 24, 2022 at 12:16 am
[url=https://levothyroxine.fun/]synthroid 50 mcg coupon[/url]
RodneyTab · August 24, 2022 at 12:29 am
[url=http://proscar.site/]generic propecia canada pharmacy[/url]
PaulCounk · August 24, 2022 at 12:43 am
[url=https://viagra.monster/]viagra 25mg[/url]
DavisMug · August 24, 2022 at 12:44 am
[url=http://seroquel.site/]seroquel sr[/url]
RicIsose · August 24, 2022 at 12:46 am
[url=https://hydroxyzine.fun/]where can i buy atarax in uk[/url] [url=https://cialiswtab.quest/]best price cialis canadian pharmacy[/url] [url=https://levothyroxine.xyz/]cheap synthroid online[/url] [url=https://budesonide.run/]budesonide tablets cost[/url] [url=https://allopurinol.xyz/]allopurinol canadian pharmacy[/url] [url=https://inderal.site/]inderal 10 mg online[/url]
KiaCounk · August 24, 2022 at 12:51 am
[url=http://tadacip.xyz/]canadian pharmacy tadacip[/url]
MarkCounk · August 24, 2022 at 1:03 am
[url=https://valtrex.fun/]get valtrex online[/url]
IvyCounk · August 24, 2022 at 1:05 am
[url=http://lasix.wtf/]lasix price[/url] [url=http://doxycycline.network/]doxycycline prescription cost[/url] [url=http://propecia.capetown/]propecia india[/url] [url=http://budesonide.site/]budesonide uk[/url] [url=http://motrin.site/]800 mg motrin prescription[/url] [url=http://orlistat.life/]medicine xenical[/url] [url=http://fluoxetine.fun/]fluoxetine 40 mg capsules[/url]
JasonCounk · August 24, 2022 at 1:09 am
[url=http://atomoxetine.sbs/]strattera 40 mg pills[/url]
UgoCounk · August 24, 2022 at 1:30 am
[url=http://colchicine05.com/]colchicine 0.6 mg price[/url]
SueCounk · August 24, 2022 at 1:32 am
[url=http://valacyclovir.site/]valtrex 400 mg[/url]
Estebanguall · August 24, 2022 at 1:35 am
[url=https://cialiswtab.quest/]cialis 5mg generic[/url]
Estebanguall · August 24, 2022 at 1:37 am
[url=https://budesonide.run/]budesonide 180 mcg[/url]
JackCounk · August 24, 2022 at 1:40 am
[url=https://ventolin.fun/]buy cheap ventolin online[/url]
CarlCounk · August 24, 2022 at 1:48 am
[url=https://valacyclovir.site/]buy valtrex online without a prescription[/url]
KimCounk · August 24, 2022 at 1:49 am
[url=https://silagra.site/]silagra 100 online[/url]
JaneCounk · August 24, 2022 at 1:50 am
[url=http://sildalis.click/]sildalis 120[/url]
RobertFoold · August 24, 2022 at 2:02 am
[url=https://trental.xyz/]buy trental online uk[/url]
Estebanguall · August 24, 2022 at 2:20 am
[url=https://onlinepharmacy.media/]canadian pharmacy viagra 50 mg[/url]
JaneCounk · August 24, 2022 at 2:20 am
[url=http://piroxicam.fun/]feldene over the counter[/url]
Jameseloro · August 24, 2022 at 2:23 am
[url=https://glucophage.site/]metformin 50[/url] [url=https://azithromycin.media/]zithromax 25mg[/url]
AmyCounk · August 24, 2022 at 2:34 am
[url=https://dutasteride.fun/]order avodart online[/url]
RichardFaply · August 24, 2022 at 2:35 am
[url=http://diflucan.xyz/]where to purchase diflucan[/url] [url=http://glucophage.icu/]can you buy metformin in canada without a prescription[/url] [url=http://kamagra.fun/]kamagra pill[/url] [url=http://zanaflex.site/]zanaflex 2 mg india[/url] [url=http://allopurinol.xyz/]allopurinol 209[/url] [url=http://budesonide.run/]budesonide 90 mcg[/url] [url=http://albenza.business/]400 mg albendazole[/url] [url=http://hydroxychloroquine.ink/]plaquenil headache[/url]
DarrylSef · August 24, 2022 at 2:37 am
[url=http://augmentin.business/]amoxicillin 875 mg tablet[/url] [url=http://cialiswtab.quest/]generic tadalafil in us[/url] [url=http://levothyroxine.fun/]synthroid 150 coupon[/url] [url=http://trazodone.icu/]trazodone purchase online[/url] [url=http://flagyl.site/]flagyl online[/url] [url=http://trazodone.fun/]trazodone cost[/url] [url=http://provigil.life/]buy provigil uk[/url]
JimCounk · August 24, 2022 at 2:37 am
[url=https://lasix.wtf/]buy furosemide 20 mg[/url]
RicIsose · August 24, 2022 at 2:49 am
[url=https://seroquel.site/]cost of seroquel 25 mg[/url] [url=https://yasmin.monster/]yasmin generic[/url] [url=https://triamterene.cfd/]buy triamterene[/url] [url=https://provigil.life/]modafinil 200 mg tablet price in india[/url] [url=https://prednisolone.fun/]buy prednisolone uk[/url] [url=https://sildenafil.site/]viagra 800mg price[/url] [url=https://hydroxychloroquine.makeup/]where to buy plaquenil[/url]
TeoCounk · August 24, 2022 at 3:00 am
[url=http://lisinopril.click/]lisinopril prescription coupon[/url]
DenCounk · August 24, 2022 at 3:01 am
[url=http://orlistat.fun/]where to buy orlistat in canada[/url]
WimCounk · August 24, 2022 at 3:01 am
[url=http://avodart2.com/]avodart[/url]
EvaCounk · August 24, 2022 at 3:13 am
[url=https://lisinopril.click/]zestril 40 mg[/url]
JimCounk · August 24, 2022 at 3:14 am
[url=https://levofloxacin.life/]levaquin pill[/url]
TimothyThive · August 24, 2022 at 3:18 am
[url=http://inderal.site/]can i buy inderal online[/url]
Estebanguall · August 24, 2022 at 3:25 am
[url=https://levothyroxine.fun/]synthroid generic canada[/url]
IvyCounk · August 24, 2022 at 3:32 am
[url=http://cialiswtabs.monster/]cheap cialis in usa[/url] [url=http://doxycycline.network/]doxycycline price[/url] [url=http://atomoxetine.sbs/]purchase stattera[/url]
Davidhup · August 24, 2022 at 3:43 am
[url=https://diflucan.xyz/]diflucan buy nz[/url]
ElwoodGon · August 24, 2022 at 3:45 am
[url=http://zanaflex.site/]zanaflex for migraines[/url]
JoeCounk · August 24, 2022 at 3:48 am
[url=https://zestoretic.fun/]zestoretic 20 25 mg[/url] [url=https://onlinepharmacy.run/]canada cloud pharmacy[/url] [url=https://cymbalta.site/]buy cymbalta without prescription[/url]
MiclTek · August 24, 2022 at 4:02 am
[url=http://prednisone.network/]prednisone without precription[/url]
ZakCounk · August 24, 2022 at 4:12 am
[url=http://lasix.wtf/]lasix[/url] [url=http://viagraotabs.quest/]women viagra tablet[/url] [url=http://accutane.click/]cheap accutane singapore[/url]
NickCounk · August 24, 2022 at 4:18 am
[url=https://fluoxetine.fun/]prozac buying online uk[/url]
ElwoodGon · August 24, 2022 at 4:23 am
[url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide[/url]
TeoCounk · August 24, 2022 at 4:46 am
[url=http://ventolin.click/]albuterol over the counter usa[/url]
JimCounk · August 24, 2022 at 4:52 am
[url=https://silagra.site/]silagra pills in india[/url]
WilliamWem · August 24, 2022 at 4:58 am
[url=https://hydroxychloroquine.makeup/]plaquenil 400 mg[/url] [url=https://kamagra.fun/]kamagra 100 best prices[/url] [url=https://hydroxychloroquine.ink/]buy plaquenil 0.5[/url] [url=https://seroquel.fun/]seroquel australia[/url] [url=https://avana.click/]dapoxetine 60mg uk[/url] [url=https://azithromycin.media/]azithromycin pills for sale[/url] [url=https://budesonide.run/]budesonide prescription[/url] [url=https://diflucan.xyz/]diflucan 150 mg pill[/url]
RichardFaply · August 24, 2022 at 5:29 am
[url=http://vermox.fun/]vermox buy online uk[/url] [url=http://hydroxychloroquine.ink/]plaquenil for ra[/url] [url=http://hydroxychloroquine.makeup/]plaquenil sulfate[/url] [url=http://cialiswtab.quest/]buy generic tadalafil[/url] [url=http://prednisolone.fun/]buy prednisolone 5mg online[/url] [url=http://vardenafil.network/]cheap levitra generic[/url] [url=http://onlinepharmacy.download/]web pharmacy[/url]
ElwoodGon · August 24, 2022 at 5:46 am
[url=http://hydroxychloroquine.makeup/]hydroxy-chloroquine[/url]
IvyCounk · August 24, 2022 at 5:49 am
[url=http://orlistat.life/]buy xenical cheap[/url] [url=http://sildalis.click/]sildalis online[/url]
MaryCounk · August 24, 2022 at 5:49 am
[url=https://dexamethasone.site/]dexamethasone 4 mg tablet price[/url] [url=https://budesonide.site/]budesonide 9 mg capsules[/url] [url=https://orlistat.life/]orlistat weight loss[/url] [url=https://lisinopril.site/]lisinopril 30 mg price[/url] [url=https://sildalis.fun/]generic sildalis[/url] [url=https://ampicillin.site/]ampicillin capsule 500mg[/url] [url=https://levitra.sbs/]purchase levitra online[/url] [url=https://zestoretic.fun/]zestoretic tabs[/url]
Estebanguall · August 24, 2022 at 6:01 am
[url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 25 mg pill[/url]
MichaelGuabe · August 24, 2022 at 6:12 am
[url=http://sildenafil.site/]sildenafil fast shipping[/url]
IvyCounk · August 24, 2022 at 6:17 am
[url=http://levitra.sbs/]buy cheap vardenafil[/url] [url=http://sildalis.fun/]sildalis 120[/url] [url=http://valacyclovir.site/]cheap generic valtrex without prescription[/url] [url=http://mebendazole.site/]buy vermox canada[/url] [url=http://diflucan.sbs/]can you buy diflucan in mexico[/url] [url=http://zovirax.fun/]zovirax pills[/url] [url=http://lisinopril.click/]purchase lisinopril 40 mg[/url]
MaryCounk · August 24, 2022 at 6:20 am
[url=https://zovirax.fun/]buy acyclovir cream uk[/url] [url=https://doxycycline.network/]buy generic doxycycline[/url] [url=https://sildalis.fun/]sildalis cheap[/url] [url=https://viagra.monster/]viagra in europe[/url] [url=https://silagra.site/]silagra pills[/url] [url=https://hydroxychloroquine.business/]quineprox 40 mg[/url] [url=https://dutasteride.fun/]buy avodart 2.5 mg[/url]
BooCounk · August 24, 2022 at 6:25 am
[url=https://cialisutab.quest/]cialis uk no prescription[/url]
Michaelemult · August 24, 2022 at 6:34 am
[url=https://cephalexin.icu/]how to get cephalexin[/url]
MiaCounk · August 24, 2022 at 6:35 am
[url=http://silagra.site/]silagra 50 mg price[/url]
KiaCounk · August 24, 2022 at 6:38 am
[url=http://accutane.wtf/]order accutane no prescription[/url]
DavisMug · August 24, 2022 at 6:40 am
[url=http://augmentin.business/]amoxicillin medicine[/url]
JoeCounk · August 24, 2022 at 7:00 am
[url=https://dutasteride.fun/]avodart 500mcg[/url] [url=https://orlistat.fun/]buy orlistat[/url] [url=https://zovirax.fun/]acyclovir 3[/url] [url=https://diflucan.sbs/]how much is diflucan 150 mg[/url] [url=https://ampicillin.site/]canadian pharmacy ampicillin[/url]
ElwoodGon · August 24, 2022 at 7:04 am
[url=http://retinoa.xyz/]retino 0.025 gel[/url]
KiaCounk · August 24, 2022 at 7:17 am
[url=http://levofloxacin.site/]buy levaquin online[/url]
ElwoodGon · August 24, 2022 at 7:32 am
[url=http://cialiswtab.quest/]cialis or viagra for women[/url]
TimothyThive · August 24, 2022 at 7:34 am
[url=http://azithromycin.media/]azithromycin 40 mg[/url]
EyeCounk · August 24, 2022 at 7:35 am
[url=http://zovirax.fun/]cost of acyclovir 200 mg[/url] [url=http://clopidogrel.site/]plavix medication price[/url] [url=http://celexa.cfd/]celexa cost usa[/url] [url=http://hydroxychloroquine.business/]plaquenil generic coupon[/url] [url=http://orlistat.life/]how to buy xenical online[/url] [url=http://motrin.site/]motrin 100[/url] [url=http://viagravtabs.monster/]otc viagra canada[/url]
Jameseloro · August 24, 2022 at 7:42 am
[url=https://augmentin.business/]amoxicillin 400mg[/url] [url=https://trental.xyz/]trental medication[/url] [url=https://provigil.life/]provigil pills for sale[/url]
BooCounk · August 24, 2022 at 7:43 am
[url=https://cialistb.com/]cialis[/url]
Michaelemult · August 24, 2022 at 7:50 am
[url=https://onlinepharmacy.media/]canadian pharmacy no rx needed[/url]
EvaCounk · August 24, 2022 at 7:55 am
[url=https://dexamethasone.site/]dexona tablet price[/url]
KimCounk · August 24, 2022 at 7:59 am
[url=https://dexamethasone.site/]dexamethasone 8 mg price[/url]
RobertFoold · August 24, 2022 at 8:08 am
[url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 10 mg[/url]
Estebanguall · August 24, 2022 at 8:09 am
[url=https://sildenafil.site/]how to viagra online[/url]
AnnaCounk · August 24, 2022 at 8:15 am
[url=https://modafinil.durban/]modafinil prescription canada[/url]
TimothyThive · August 24, 2022 at 8:22 am
[url=http://allopurinol.icu/]allopurinol drug prices[/url]
JosephMaict · August 24, 2022 at 8:23 am
[url=http://hydroxyzine.fun/]atarax buy[/url] [url=http://cialiswtab.quest/]cialis order online usa[/url] [url=http://budesonide.run/]otc budesonide[/url] [url=http://seroquel.site/]buy seroquel uk[/url] [url=http://diflucan.xyz/]buy fluconazole online[/url]
NickCounk · August 24, 2022 at 8:29 am
[url=https://ampicillin.site/]buy cheap ampicillin[/url]
WilliamWem · August 24, 2022 at 8:43 am
[url=https://hydroxychloroquine.makeup/]hydroxychloroquine online[/url] [url=https://sildenafil.site/]viagra for sale online australia[/url] [url=https://kamagra.fun/]kamagra drug[/url] [url=https://albenza.icu/]where can i buy albenza[/url] [url=https://allopurinol.icu/]allopurinol online[/url] [url=https://dapoxetine.fun/]how to get priligy[/url]
SueCounk · August 24, 2022 at 8:44 am
[url=http://sildalis.click/]sildalis online[/url]
JaneCounk · August 24, 2022 at 8:44 am
[url=http://methocarbamol.site/]robaxin 700 mg[/url]
DarrylSef · August 24, 2022 at 8:50 am
[url=http://onlinepharmacy.win/]no prescription pharmacy paypal[/url] [url=http://hydroxyzine.fun/]atarax best price[/url]
DenCounk · August 24, 2022 at 9:02 am
[url=http://mebendazole.site/]vermox generic[/url]
RichardFaply · August 24, 2022 at 9:14 am
[url=http://finasteride.site/]cheap propecia india[/url] [url=http://trazodone.fun/]trazodone 300 mg tablet[/url]
Estebanguall · August 24, 2022 at 9:15 am
[url=https://hydroxyzine.fun/]atarax 10mg tablet price[/url]
DenCounk · August 24, 2022 at 9:16 am
[url=http://mebendazole.site/]vermox medication[/url]
DavisMug · August 24, 2022 at 9:19 am
[url=http://antabuse.site/]antabuse cost in us[/url]
YonCounk · August 24, 2022 at 9:22 am
[url=http://silagra.site/]silagra 0.25[/url]
JudyCounk · August 24, 2022 at 9:32 am
[url=https://propecia.capetown/]propecia tablets in india[/url]
Michaeldrist · August 24, 2022 at 9:43 am
[url=http://hydroxychloroquine.makeup/]plaquenil 200 mg price uk[/url]
DenCounk · August 24, 2022 at 9:49 am
[url=http://ventolin.click/]buy ventolin inhaler[/url]
DenCounk · August 24, 2022 at 9:58 am
[url=http://levitra.sbs/]how to buy levitra without a prescription[/url]
CarlCounk · August 24, 2022 at 9:59 am
[url=https://viagraotabs.quest/]australia viagra price[/url]
Samuelraisk · August 24, 2022 at 10:31 am
[url=https://yasmin.monster/]yasmin 22[/url]
JasonCounk · August 24, 2022 at 10:36 am
[url=http://doxycycline.network/]doxycycline 100mg cap price[/url]
RichardFaply · August 24, 2022 at 10:41 am
[url=http://antabuse.site/]buy antabuse pills[/url] [url=http://hydroxychloroquine.makeup/]quineprox[/url] [url=http://vardenafil.network/]levitra us[/url] [url=http://finasteride.site/]order finasteride[/url] [url=http://fildena.fun/]where to buy fildena[/url] [url=http://trazodone.icu/]trazodone generic[/url] [url=http://prozac.media/]fluoxetine 8 mg[/url]
Davidhup · August 24, 2022 at 10:53 am
[url=https://onlinepharmacy.media/]reputable online pharmacy reddit[/url]
NickCounk · August 24, 2022 at 11:03 am
[url=https://silagra.site/]buy silagra tablets[/url]
AshCounk · August 24, 2022 at 11:08 am
[url=https://synthroid.works/]synthroid 150 mcg cost[/url] [url=https://baclofen.store/]baclofen buy online canada[/url] [url=https://retina.sale/]where to get tretinoin gel[/url] [url=https://elimiteacticin.quest/]buy elimite cream[/url] [url=https://prazosinp.com/]prazosin drug[/url] [url=https://prozac.cyou/]30 mg prozac daily[/url] [url=https://seroquel.shop/]seroquel withouth presription[/url] [url=https://buytadacip.store/]tadacip online uk[/url]
MichaelDwego · August 24, 2022 at 11:17 am
[url=https://antabuse.site/]antabuse price australia[/url]
PaulCounk · August 24, 2022 at 11:30 am
[url=https://viagra.monster/]sildenafil 50mg india[/url]
AnnaCounk · August 24, 2022 at 11:45 am
[url=https://hydroxychloroquine.business/]medicine plaquenil 200 mg[/url]
YonCounk · August 24, 2022 at 12:03 pm
[url=http://hydroxychloroquine.business/]plaquenil otc[/url]
DavisMug · August 24, 2022 at 12:23 pm
[url=http://finasteride.site/]order propecia online uk[/url]
Curtisvibia · August 24, 2022 at 12:26 pm
[url=https://zanaflex.site/]tizanidine generic 4mg[/url]
UgoCounk · August 24, 2022 at 12:27 pm
[url=http://buyfildena.guru/]fildena canada[/url]
Estebanguall · August 24, 2022 at 12:34 pm
[url=https://fildena.fun/]fildena 100 online india[/url]
JaneCounk · August 24, 2022 at 12:35 pm
[url=http://piroxicam.fun/]feldene 10 mg[/url]
Estebanguall · August 24, 2022 at 12:53 pm
[url=https://hydroxychloroquine.ink/]plaquenil in australia[/url]
BooCounk · August 24, 2022 at 1:02 pm
[url=https://zoloft.guru/]buy zoloft online uk[/url]
BooCounk · August 24, 2022 at 1:05 pm
[url=https://neurontin.guru/]1500 mg gabapentin[/url]
RodneyTab · August 24, 2022 at 1:18 pm
[url=http://albenza.business/]buying albendazole canada without prescription[/url]
JimCounk · August 24, 2022 at 1:26 pm
[url=https://levofloxacin.life/]levaquin antibiotic[/url]
TeoCounk · August 24, 2022 at 1:41 pm
[url=http://doxycycline.network/]buy doxycycline 100mg online india[/url]
MiclTek · August 24, 2022 at 1:42 pm
[url=http://finasteride.site/]finasterid[/url]
TommyHepsy · August 24, 2022 at 1:56 pm
[url=https://seroquel.site/]buy seroquel online cheap[/url]
LisaCounk · August 24, 2022 at 2:04 pm
[url=https://fluoxetine.fun/]prozac pills buy[/url]
MiaCounk · August 24, 2022 at 2:07 pm
[url=http://albuterol.fun/]how much is ventolin in canada[/url]
RichardFaply · August 24, 2022 at 2:08 pm
[url=http://albenza.business/]albendazole in india[/url] [url=http://augmentin.business/]amoxil pharmacy[/url] [url=http://suhagra.fun/]suhagra 50 mg buy[/url] [url=http://prednisone.network/]india buy prednisone online[/url] [url=http://seroquel.fun/]buy seroquel[/url] [url=http://levothyroxine.fun/]synthroid 200 mg[/url]
TimothyThive · August 24, 2022 at 2:30 pm
[url=http://prozac.media/]buy generic prozac online[/url]
MiclTek · August 24, 2022 at 2:33 pm
[url=http://triamterene.cfd/]triamterene hctz 75 50 mg[/url]
UgoCounk · August 24, 2022 at 2:37 pm
[url=http://cafergot.digital/]buy cafergot tablets[/url]
EvaCounk · August 24, 2022 at 2:47 pm
[url=https://lisinopril.click/]lisinopril hctz[/url]
DenCounk · August 24, 2022 at 2:47 pm
[url=http://silagra.site/]silagra 100 mg[/url]
ElwoodGon · August 24, 2022 at 2:50 pm
[url=http://inderal.site/]inderal cheap[/url]
MaryCounk · August 24, 2022 at 3:05 pm
[url=https://lisinopril.site/]buy generic lisinopril[/url] [url=https://orlistat.fun/]buy xenical online cheap[/url] [url=https://diclofenac.fun/]diclofenac brand in india[/url] [url=https://levofloxacin.site/]buy cheap levaquin[/url]
TommyHepsy · August 24, 2022 at 3:06 pm
[url=https://trazodone.fun/]trazodone brand name[/url]
MiclTek · August 24, 2022 at 3:11 pm
[url=http://onlinepharmacy.win/]international online pharmacy[/url]
MarvinZem · August 24, 2022 at 3:21 pm
[url=https://yasmin.monster/]can i buy yasmin over the counter[/url]
ElwoodGon · August 24, 2022 at 3:21 pm
[url=http://inderal.site/]propranolol medicine[/url]
IvyCounk · August 24, 2022 at 3:26 pm
[url=http://viagravtabs.monster/]how to get a viagra prescription[/url] [url=http://modafinil.run/]where can i purchase modafinil[/url] [url=http://dutasteride.fun/]avodart without prescription[/url] [url=http://modafinil.durban/]buy modafinil online uk[/url] [url=http://fluoxetine.fun/]80 mg fluoxetine daily[/url] [url=http://ventolin.fun/]ventolin for sale[/url] [url=http://levofloxacin.life/]levaquin buy online[/url]
EyeCounk · August 24, 2022 at 3:39 pm
[url=http://doxycycline.network/]doxycycline 100mg tablets nz[/url] [url=http://fluoxetine.life/]prozac australia[/url] [url=http://zovirax.fun/]acyclovir canada price[/url] [url=http://cialiswtabs.monster/]buy generic tadalafil in us[/url] [url=http://valtrex.fun/]generic valtrex for sale[/url] [url=http://ampicillin.site/]price of ampicillin[/url]
MaryCounk · August 24, 2022 at 3:43 pm
[url=https://ampicillin.site/]ampicillin 2g[/url] [url=https://onlinepharmacy.run/]best value pharmacy[/url] [url=https://hydroxychloroquine.business/]plaquenil hives[/url]
WilliamWem · August 24, 2022 at 3:44 pm
[url=https://prednisone.network/]prednisone without prescription[/url] [url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide tab 12.5 mg[/url]
EyeCounk · August 24, 2022 at 3:47 pm
[url=http://modafinil.run/]modafinil 150 mg[/url] [url=http://ventolin.fun/]buying ventolin in usa[/url] [url=http://viagra.monster/]order viagra online canada[/url] [url=http://nexium.cfd/]5mg nexium[/url] [url=http://hydroxychloroquine.business/]generic plaquenil cost[/url] [url=http://levofloxacin.site/]levaquin 500 mg levofloxacin antibiotics[/url] [url=http://cymbalta.site/]cymbalta drug prices[/url] [url=http://viagrahtabs.quest/]generic viagra from canada[/url]
Edgarlor · August 24, 2022 at 4:09 pm
[url=http://levothyroxine.fun/]synthroid 200 mcg coupon[/url]
WimCounk · August 24, 2022 at 4:22 pm
[url=http://mebendazole.store/]vermox us[/url]
DarrylSef · August 24, 2022 at 4:26 pm
[url=http://retinoa.xyz/]retino 0.025 gel[/url] [url=http://allopurinol.icu/]allopurinol price in india[/url] [url=http://dapoxetine.fun/]avana[/url] [url=http://kamagra.fun/]buy kamagra online eu[/url] [url=http://finasteride.site/]how much is propecia[/url] [url=http://hydroxyzine.fun/]atarax hydroxyzine[/url] [url=http://estrace.fun/]estrace hair loss[/url] [url=http://vermox.fun/]vermox tablets price[/url]
CarlCounk · August 24, 2022 at 4:35 pm
[url=https://malegra.fun/]malegra 25[/url]
JudyCounk · August 24, 2022 at 4:41 pm
[url=https://modafinil.durban/]modafinil online usa[/url]
TeoCounk · August 24, 2022 at 4:56 pm
[url=http://piroxicam.fun/]medicine feldene 20[/url]
JoeCounk · August 24, 2022 at 5:03 pm
[url=https://diflucan.sbs/]purchase diflucan[/url] [url=https://modafinil.durban/]how to buy modafinil online[/url] [url=https://orlistat.fun/]orlistat online uk[/url] [url=https://zovirax.fun/]where to buy acyclovir over the counter[/url] [url=https://doxycycline.network/]can i buy doxycycline over the counter[/url] [url=https://orlistat.life/]xenical australia[/url] [url=https://ventolin.fun/]ventolin inhaler without prescription[/url]
BooCounk · August 24, 2022 at 5:17 pm
[url=https://nolvadexgen.com/]nolvadex prices[/url]
UgoCounk · August 24, 2022 at 5:22 pm
[url=http://buylisinopril.works/]lisinopril pill 10mg[/url]
MiclTek · August 24, 2022 at 5:29 pm
[url=http://hydroxychloroquine.makeup/]quineprox 900[/url]
WilliamWem · August 24, 2022 at 5:30 pm
[url=https://vardenafil.network/]buy genuine levitra online[/url] [url=https://retinoa.xyz/]retino 0.05 price[/url] [url=https://triamterene.cfd/]triamterene hctz 75-50 mg tab[/url] [url=https://glucophage.site/]metformin generic price[/url] [url=https://diflucan.xyz/]diflucan generic australia[/url] [url=https://allopurinol.icu/]allopurinol 600 mg price[/url] [url=https://yasmin.monster/]yasmin 28 price[/url]
TeoCounk · August 24, 2022 at 5:37 pm
[url=http://ampicillin.site/]ampicillin online uk[/url]
Michaeldrist · August 24, 2022 at 5:48 pm
[url=http://triamterene.cfd/]triamterene hctz 75 50 mg tab[/url]
SueCounk · August 24, 2022 at 5:50 pm
[url=http://levofloxacin.site/]levaquin buy online[/url]
JackCounk · August 24, 2022 at 5:56 pm
[url=https://tadacip.xyz/]tadacip online india[/url]
WimCounk · August 24, 2022 at 5:57 pm
[url=http://finasteride.solutions/]finasteride pills for sale[/url]
ElwoodGon · August 24, 2022 at 5:58 pm
[url=http://glucophage.icu/]metformin pill for sale[/url]
Jameseloro · August 24, 2022 at 6:04 pm
[url=https://antabuse.site/]disulfiram no prescription online[/url] [url=https://augmentin.business/]augmentin 875 generic price[/url]
SueCounk · August 24, 2022 at 6:05 pm
[url=http://doxycycline.network/]buy doxycycline from canada[/url]
IvyCounk · August 24, 2022 at 6:07 pm
[url=http://celexa.cfd/]citalopram 20mg for sale[/url] [url=http://fluoxetine.life/]buy prozac paypal[/url] [url=http://onlinepharmacy.run/]reputable overseas online pharmacies[/url] [url=http://ventolin.fun/]albuterol 0063[/url] [url=http://viagrahtabs.quest/]viagra price per pill[/url] [url=http://levofloxacin.site/]levaquin medication[/url] [url=http://zovirax.fun/]zovirax 400[/url] [url=http://nexium.cfd/]nexium 7 tablets[/url]
RobertFoold · August 24, 2022 at 6:09 pm
[url=https://prednisone.network/]prednisone generic[/url]
TeoCounk · August 24, 2022 at 6:12 pm
[url=http://sildalis.click/]sildalis india[/url]
Edgarlor · August 24, 2022 at 6:20 pm
[url=http://hydroxychloroquine.makeup/]plaquenil retinal toxicity[/url]
ElwoodGon · August 24, 2022 at 6:21 pm
[url=http://tamoxifen.fun/]nolvadex tabs[/url]
WilliamWem · August 24, 2022 at 6:21 pm
[url=https://diflucan.xyz/]diflucan tablets buy[/url] [url=https://estrace.fun/]order estrace cream online[/url] [url=https://inderal.site/]propranolol 10 mg tablet[/url] [url=https://albenza.icu/]purchase albendazole[/url] [url=https://avana.click/]dapoxetine for sale uk[/url] [url=https://onlinepharmacy.win/]top 10 pharmacy websites[/url] [url=https://hydroxychloroquine.makeup/]hydroxychloroquine sulfate 300 mg[/url] [url=https://triamterene.cfd/]triamterene-hctz[/url]
SueCounk · August 24, 2022 at 6:32 pm
[url=http://mebendazole.site/]vermox price nz[/url]
Samuelraisk · August 24, 2022 at 6:44 pm
[url=https://onlinepharmacy.media/]india pharmacy mail order[/url]
WimCounk · August 24, 2022 at 6:57 pm
[url=http://doxycyclina.online/]doxycycline purchase uk[/url]
ElwoodGon · August 24, 2022 at 7:03 pm
[url=http://triamterene.cfd/]triamterene-hctz[/url]
WimCounk · August 24, 2022 at 7:22 pm
[url=http://olmesartan.quest/]benicar[/url]
JudyCounk · August 24, 2022 at 7:24 pm
[url=https://mebendazole.site/]vermox 500mg for sale[/url]
IvyCounk · August 24, 2022 at 7:26 pm
[url=http://valacyclovir.site/]valtrex australia buy[/url] [url=http://malegra.fun/]buy malegra 50 mg[/url] [url=http://orlistat.fun/]where to buy xenical over the counter[/url] [url=http://celexa.cfd/]citalopram without prescription[/url] [url=http://levofloxacin.site/]price of levaquin[/url] [url=http://mebendazole.site/]vermox tablets buy online[/url] [url=http://lisinopril.click/]zestril[/url] [url=http://lisinopril.site/]zestril 25 mg[/url]
Estebanguall · August 24, 2022 at 7:28 pm
[url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 12.5 mg capsule[/url]
RodneyTab · August 24, 2022 at 7:37 pm
[url=http://prozac.media/]20 mg prozac[/url]
IvyCounk · August 24, 2022 at 7:40 pm
[url=http://zovirax.fun/]zovirax cream cost in india[/url] [url=http://levitra.sbs/]vardenafil purchase[/url] [url=http://orlistat.fun/]orlistat 120mg capsules[/url] [url=http://diflucan.sbs/]diflucan 150 mg tablet[/url] [url=http://piroxicam.fun/]feldene 20 mg cost[/url] [url=http://valtrex.fun/]valtrex 500 price[/url]
MichaelGuabe · August 24, 2022 at 7:44 pm
[url=http://levothyroxine.xyz/]synthroid purchase online[/url]
MichaelDwego · August 24, 2022 at 7:50 pm
[url=https://proscar.site/]proscar finasteride[/url]
ElwoodGon · August 24, 2022 at 7:50 pm
[url=http://hydroxychloroquine.makeup/]quineprox 750mg[/url]
DavisMug · August 24, 2022 at 7:59 pm
[url=http://levothyroxine.xyz/]synthroid 137 coupon[/url]
Estebanguall · August 24, 2022 at 8:02 pm
[url=https://drugstore.today/]best online thai pharmacy[/url]
TommyHepsy · August 24, 2022 at 8:07 pm
[url=https://drugstore.today/]indian pharmacy[/url]
DarrylSef · August 24, 2022 at 8:12 pm
[url=http://azithromycin.media/]zithromax antibiotic without prescription[/url] [url=http://diflucan.xyz/]diflucan cream over the counter[/url] [url=http://seroquel.site/]seroquel 150 mg[/url]
EvaCounk · August 24, 2022 at 8:19 pm
[url=https://lasix.wtf/]lasix over the counter australia[/url]
ElwoodGon · August 24, 2022 at 8:21 pm
[url=http://seroquel.fun/]seroquel 50 mg sleep[/url]
EvaCounk · August 24, 2022 at 8:21 pm
[url=https://levitra.sbs/]levitra online rx[/url]
MarkCounk · August 24, 2022 at 8:23 pm
[url=https://methocarbamol.site/]robaxin 500 mg[/url]
JoeCounk · August 24, 2022 at 8:59 pm
[url=https://viagraotabs.quest/]buy viagra online with visa[/url] [url=https://orlistat.life/]how to get xenical in canada[/url] [url=https://atomoxetine.sbs/]strattera order[/url]
RichardFaply · August 24, 2022 at 9:00 pm
[url=http://kamagra.fun/]kamagra online south africa[/url] [url=http://proscar.site/]online propecia prescription[/url]
Curtisvibia · August 24, 2022 at 9:05 pm
[url=https://estrace.fun/]canada estrace cream[/url]
Charlesaduse · August 24, 2022 at 9:12 pm
[url=http://prednisone.network/]prednisone over the counter uk[/url]
DavisMug · August 24, 2022 at 9:16 pm
[url=http://proscar.site/]finasteride 0.1[/url]
TommyHepsy · August 24, 2022 at 9:16 pm
[url=https://onlinepharmacy.media/]reputable online pharmacy[/url]
SueCounk · August 24, 2022 at 9:31 pm
[url=http://dutasteride.fun/]buy avodart uk[/url]
LisaCounk · August 24, 2022 at 9:32 pm
[url=https://valtrex.fun/]valtrex over counter[/url]
MarkCounk · August 24, 2022 at 9:33 pm
[url=https://dexamethasone.site/]dexamethasone 4 mg tablet price in india[/url]
TommyHepsy · August 24, 2022 at 9:34 pm
[url=https://provigil.life/]provigil prescription uk[/url]
JudyCounk · August 24, 2022 at 9:40 pm
[url=https://motrin.site/]prescription motrin 600 mg[/url]
TimothyThive · August 24, 2022 at 9:42 pm
[url=http://vardenafil.network/]viagra levitra[/url]
TommyHepsy · August 24, 2022 at 9:44 pm
[url=https://diflucan.xyz/]diflucan coupon[/url]
Edgarlor · August 24, 2022 at 9:50 pm
[url=http://dapoxetine.fun/]dapoxetine online pharmacy[/url]
DarrylSef · August 24, 2022 at 9:55 pm
[url=http://prednisone.network/]no prescription prenisone[/url] [url=http://zanaflex.site/]12 mg tizanidine[/url] [url=http://yasmin.monster/]generic yasmin price[/url] [url=http://glucophage.icu/]order metformin europe[/url] [url=http://trental.xyz/]trental 400 mg price uk[/url] [url=http://vermox.fun/]buy vermox uk[/url] [url=http://augmentin.business/]augmentin 500 mg price[/url]
KiaCounk · August 24, 2022 at 10:04 pm
[url=http://motrin.site/]motrin 800 mg rx coupon[/url]
AnnaCounk · August 24, 2022 at 10:05 pm
[url=https://lisinopril.click/]lisinopril 40 mg tablet price[/url]
KimCounk · August 24, 2022 at 10:05 pm
[url=https://albuterol.fun/]albuterol 063[/url]
JasonCounk · August 24, 2022 at 10:06 pm
[url=http://nexium.cfd/]nexium pills cost[/url]
NickCounk · August 24, 2022 at 10:13 pm
[url=https://dutasteride.fun/]how much is avodart[/url]
RobertFoold · August 24, 2022 at 10:15 pm
[url=https://seroquel.site/]can you cut seroquel xr in half[/url]
JudyCounk · August 24, 2022 at 10:17 pm
[url=https://onlinepharmacy.run/]pharmacy no prescription required[/url]
AlanCounk · August 24, 2022 at 10:23 pm
[url=https://hydroxychloroquine.business/]plaquenil tabs[/url] [url=https://atomoxetine.sbs/]buy strattera online pharmacy without prescription[/url] [url=https://orlistat.fun/]orlistat online cheap[/url] [url=https://dutasteride.fun/]buy avodart 2.5 mg[/url] [url=https://diflucan.sbs/]diflucan medicine[/url] [url=https://ventolin.fun/]albuterol 1.5 mg[/url] [url=https://propecia.capetown/]propecia purchase online canada[/url]
MiclTek · August 24, 2022 at 10:29 pm
[url=http://hydrochlorothiazide.cfd/]rx hydrochlorothiazide[/url]
MarkCounk · August 24, 2022 at 10:35 pm
[url=https://ventolin.click/]albuterol online order[/url]
EyeCounk · August 24, 2022 at 10:36 pm
[url=http://fluoxetine.fun/]cheap prozac online[/url] [url=http://viagravtabs.monster/]viagra substitutes[/url] [url=http://accutane.click/]buy accutane with paypal[/url] [url=http://sildalis.fun/]sildalis india[/url] [url=http://levofloxacin.site/]order levaquin[/url] [url=http://cialiswtabs.monster/]how much is cialis in mexico[/url] [url=http://tadacip.xyz/]canadian pharmacy tadacip[/url]
JimCounk · August 24, 2022 at 10:40 pm
[url=https://lasix.wtf/]lasix without prescription[/url]
Edgarlor · August 24, 2022 at 11:01 pm
[url=http://budesonide.run/]budecort[/url]
MichaelDwego · August 24, 2022 at 11:13 pm
[url=https://seroquel.site/]seroquel xr package insert[/url]
Davidhup · August 24, 2022 at 11:15 pm
[url=https://prednisone.network/]prednisone without prescription medication[/url]
Charlesaduse · August 24, 2022 at 11:37 pm
[url=http://budesonide.run/]budesonide generic cost[/url]
MichaelDwego · August 24, 2022 at 11:40 pm
[url=https://seroquel.site/]where to get seroquel[/url]
JaneCounk · August 24, 2022 at 11:41 pm
[url=http://albuterol.fun/]albuterol buy online australia[/url]
RodneyTab · August 24, 2022 at 11:46 pm
[url=http://allopurinol.xyz/]allopurinol purchase[/url]
RodneyTab · August 24, 2022 at 11:48 pm
[url=http://trazodone.icu/]trazodone 150 mg[/url]
Jameseloro · August 24, 2022 at 11:57 pm
[url=https://vermox.fun/]how much is vermox[/url] [url=https://glucophage.site/]metformin 1000 mg generic[/url] [url=https://onlinepharmacy.win/]canadian pharmacy 365[/url]
Jameseloro · August 25, 2022 at 12:13 am
[url=https://prednisolone.fun/]buy prednisolone online[/url] [url=https://tamoxifen.fun/]tamoxifen price[/url] [url=https://azithromycin.media/]medicine azithromycin 500 mg[/url] [url=https://glucophage.site/]buy metformin from mexico[/url] [url=https://albenza.business/]albendazole generic price[/url] [url=https://trazodone.icu/]how much is trazodone 50 mg[/url] [url=https://hydroxychloroquine.makeup/]plaquenil south africa[/url]
IvyCounk · August 25, 2022 at 12:14 am
[url=http://sildalis.fun/]sildalis tablets[/url] [url=http://fluoxetine.life/]cheap fluoxetine online[/url] [url=http://ventolin.click/]purchase albuterol inhaler[/url] [url=http://lisinopril.site/]prinivil medication[/url] [url=http://nexium.cfd/]can i buy nexium over the counter in australia[/url] [url=http://onlinepharmacy.run/]reputable overseas online pharmacies[/url] [url=http://doxycycline.network/]doxycycline tablets 100mg[/url] [url=http://sildalis.click/]sildalis online[/url]
Davidhup · August 25, 2022 at 12:17 am
[url=https://hydroxyzine.fun/]buy atarax online[/url]
JaneCounk · August 25, 2022 at 12:21 am
[url=http://propecia.capetown/]canadian purchase propecia[/url]
RicIsose · August 25, 2022 at 12:27 am
[url=https://vardenafil.network/]cheap levitra[/url] [url=https://hydrochlorothiazide.cfd/]zestoretic medication[/url]
AlanCounk · August 25, 2022 at 12:27 am
[url=https://lasix.wtf/]lasix 12.5 mg[/url] [url=https://malegra.fun/]malegra 120 mg[/url] [url=https://accutane.click/]price of accutane without insurance[/url] [url=https://modafinil.durban/]modafinil without prescription[/url] [url=https://nexium.cfd/]nexium generic price[/url] [url=https://sildalis.fun/]sildalis in india[/url] [url=https://ampicillin.site/]ampicillin capsules usa[/url]
MarkCounk · August 25, 2022 at 12:35 am
[url=https://valacyclovir.site/]generic valtrex no prescription[/url]
JimCounk · August 25, 2022 at 12:49 am
[url=https://piroxicam.fun/]feldene canada[/url]
Curtisvibia · August 25, 2022 at 12:56 am
[url=https://glucophage.site/]otc glucophage[/url]
MiclTek · August 25, 2022 at 1:08 am
[url=http://azithromycin.media/]where can i get azithromycin over the counter[/url]
DavisMug · August 25, 2022 at 1:44 am
[url=http://inderal.site/]innopran generic[/url]
JimCounk · August 25, 2022 at 1:47 am
[url=https://ventolin.click/]albuterol canada price[/url]
AmyCounk · August 25, 2022 at 1:55 am
[url=https://propecia.capetown/]how to get propecia canada[/url]
SamCounk · August 25, 2022 at 1:58 am
[url=https://hydroxychloroquine.business/]plaquenil tablets 200mg[/url] [url=https://atomoxetine.sbs/]brand name strattera[/url]
JackCounk · August 25, 2022 at 1:59 am
[url=https://viagra.monster/]viagra buy cheap[/url]
RicIsose · August 25, 2022 at 2:06 am
[url=https://flagyl.site/]flagyl medicine[/url] [url=https://suhagra.fun/]suhagra tablet 50 mg[/url] [url=https://avana.click/]super avana without prescription[/url] [url=https://albenza.icu/]albenza price[/url] [url=https://onlinepharmacy.download/]northern pharmacy[/url] [url=https://hydrochlorothiazide.cfd/]hydrochlorothiazide 20 mg pills[/url]
Edgarlor · August 25, 2022 at 2:08 am
[url=http://flagyl.site/]buy generic flagyl[/url]
DarrylSef · August 25, 2022 at 2:11 am
[url=http://tamoxifen.fun/]tamoxifen brand[/url] [url=http://inderal.site/]propranolol 30[/url] [url=http://proscar.site/]propecia no prescription bonus 98212[/url] [url=http://prednisone.network/]prednisone pill[/url]
Jameseloro · August 25, 2022 at 2:15 am
[url=https://glucophage.site/]glucophage 1000 mg price in india[/url] [url=https://zanaflex.site/]tizanidine 4mg capsule cost[/url] [url=https://fildena.fun/]buy fildena 150[/url] [url=https://augmentin.business/]can i buy augmentin over the counter[/url] [url=https://cialiswtab.quest/]cialis 10mg online[/url] [url=https://cephalexin.icu/]cephalexin 500 mg over the counter[/url] [url=https://albenza.icu/]albendazole tablets buy online[/url] [url=https://tamoxifen.fun/]tamoxifen cream[/url]
RicIsose · August 25, 2022 at 2:25 am
[url=https://retinoa.xyz/]retino 0.05 price[/url] [url=https://vardenafil.network/]levitra 75 mg[/url] [url=https://hydroxychloroquine.ink/]plaquenil eye damage[/url] [url=https://albenza.business/]albendazole over the counter usa[/url] [url=https://yasmin.monster/]yasmin australia[/url]
MiaCounk · August 25, 2022 at 2:33 am
[url=http://dutasteride.fun/]avodart .5 mg[/url]
KiaCounk · August 25, 2022 at 2:33 am
[url=http://viagrahtabs.quest/]viagra man[/url]
TimothyThive · August 25, 2022 at 2:34 am
[url=http://inderal.site/]propranolol buy[/url]
Michaelemult · August 25, 2022 at 2:37 am
[url=https://onlinepharmacy.win/]legit pharmacy websites[/url]
Davidhup · August 25, 2022 at 2:47 am
[url=https://suhagra.fun/]buy suhagra 100mg online[/url]
NickCounk · August 25, 2022 at 2:52 am
[url=https://fluoxetine.life/]cheap prozac for sale[/url]
CarlCounk · August 25, 2022 at 2:57 am
[url=https://nexium.cfd/]nexium 40 mg best price[/url]
KimCounk · August 25, 2022 at 2:57 am
[url=https://viagra.monster/]viagra prescription australia[/url]
YonCounk · August 25, 2022 at 3:06 am
[url=http://viagravtabs.monster/]12.5 mg viagra daily[/url]
Charlesaduse · August 25, 2022 at 3:12 am
[url=http://antabuse.site/]disulfiram coupon[/url]
Estebanguall · August 25, 2022 at 3:15 am
[url=https://seroquel.site/]seroquel low blood pressure[/url]
IvyCounk · August 25, 2022 at 3:29 am
[url=http://lisinopril.click/]cost of lisinopril 40 mg[/url] [url=http://dexamethasone.site/]dexamethasone 0.75 mg tablet[/url] [url=http://motrin.site/]prescription motrin 600 mg[/url] [url=http://silagra.site/]silagra[/url] [url=http://orlistat.life/]orlistat pills for sale[/url] [url=http://ampicillin.site/]ampicillin 500mg for sale[/url]
ElwoodGon · August 25, 2022 at 3:39 am
[url=http://yasmin.monster/]yasmin birth control pills[/url]
LisaCounk · August 25, 2022 at 3:40 am
[url=https://fluoxetine.fun/]prozac 30 mg tablet[/url]
MarkCounk · August 25, 2022 at 3:55 am
[url=https://valacyclovir.site/]valtrex 500mg price canada[/url]
MiclTek · August 25, 2022 at 4:24 am
[url=http://prozac.media/]fluoxetine 10 mg[/url]
SamCounk · August 25, 2022 at 4:38 am
[url=https://piroxicam.fun/]piroxicam capsules[/url] [url=https://accutane.click/]buy accutane online canada pharmacy[/url] [url=https://propecia.capetown/]propecia online australia[/url] [url=https://viagrahtabs.quest/]generic viagra usa[/url]
TommyHepsy · August 25, 2022 at 4:54 am
[url=https://avana.click/]avana 200[/url]
MiaCounk · August 25, 2022 at 4:57 am
[url=http://diflucan.sbs/]buying diflucan[/url]
AshCounk · August 25, 2022 at 4:59 am
[url=https://propecia.shop/]cheapest generic propecia[/url] [url=https://yasmindrospirenone.monster/]yasmin uk buy[/url]
JimCounk · August 25, 2022 at 5:18 am
[url=https://zovirax.fun/]cheap acyclovir cream[/url]
Michaelemult · August 25, 2022 at 5:24 am
[url=https://prednisone.network/]order prednisone online[/url]
RodneyTab · August 25, 2022 at 5:27 am
[url=http://trental.xyz/]trental cost[/url]
BooCounk · August 25, 2022 at 5:27 am
[url=https://arimidex.works/]arimidex uk online[/url]
Jameseloro · August 25, 2022 at 5:41 am
[url=https://diflucan.xyz/]buy online diflucan[/url] [url=https://prozac.media/]order prozac online uk[/url] [url=https://cialiswtab.quest/]where to buy cialis online cheap[/url]
AmyCounk · August 25, 2022 at 5:48 am
[url=https://accutane.click/]buy accutane in india[/url]
JaneCounk · August 25, 2022 at 5:54 am
[url=http://sildalis.fun/]sildalis 120[/url]
ElwoodGon · August 25, 2022 at 6:05 am
[url=http://glucophage.site/]metformin 100 mg tablets[/url]
DavisMug · August 25, 2022 at 6:15 am
[url=http://azithromycin.media/]zithromax z pak[/url]
DenCounk · August 25, 2022 at 6:20 am
[url=http://albuterol.fun/]albuterol 90 mcg price[/url]
Estebanguall · August 25, 2022 at 6:23 am
[url=https://vermox.fun/]vermox 500[/url]
PaulCounk · August 25, 2022 at 6:29 am
[url=https://accutane.click/]accutane online india[/url]
UgoCounk · August 25, 2022 at 6:33 am
[url=http://viagrahtab.shop/]sildenafil pills online[/url]
Michaelemult · August 25, 2022 at 6:35 am
[url=https://levothyroxine.xyz/]synthroid online paypal[/url]
Jameseloro · August 25, 2022 at 6:45 am
[url=https://trazodone.fun/]trazodone no prescription[/url] [url=https://onlinepharmacy.win/]pharmacy com[/url] [url=https://vermox.fun/]buy vermox tablets uk[/url] [url=https://tamoxifen.fun/]nolvadex online pharmacy cheapest[/url]
IvyCounk · August 25, 2022 at 6:46 am
[url=http://fluoxetine.fun/]40 mg prozac tablets[/url] [url=http://accutane.wtf/]accutane pills buy[/url] [url=http://propecia.capetown/]propecia 5mg price[/url] [url=http://doxycycline.network/]doxycycline uk pharmacy[/url] [url=http://levofloxacin.life/]levofloxacin[/url] [url=http://cymbalta.site/]drug cymbalta[/url] [url=http://valtrex.fun/]valtrex online no prescription[/url]
MarvinZem · August 25, 2022 at 6:49 am
[url=https://onlinepharmacy.media/]online pharmacy non prescription drugs[/url]
ElwoodGon · August 25, 2022 at 6:51 am
[url=http://prednisone.network/]buy deltasone no prescription[/url]
JackCounk · August 25, 2022 at 7:10 am
[url=https://modafinil.run/]order modafinil online australia[/url]
MichaelDwego · August 25, 2022 at 7:16 am
[url=https://albenza.business/]albendazole price usa[/url]
LisaCounk · August 25, 2022 at 7:18 am
[url=https://budesonide.site/]budesonide online[/url]
JimCounk · August 25, 2022 at 7:22 am
[url=https://orlistat.life/]xenical prices[/url]
Edgarlor · August 25, 2022 at 7:22 am
[url=http://triamterene.cfd/]triamterene hctz 37.5 25[/url]
RodneyTab · August 25, 2022 at 7:32 am
[url=http://suhagra.fun/]buy suhagra 50mg[/url]
KimCounk · August 25, 2022 at 7:40 am
[url=https://dexamethasone.site/]dexamethasone 8 mg tablets[/url]
Estebanguall · August 25, 2022 at 7:42 am
[url=https://zanaflex.site/]generic tizanidine[/url]
JosephMaict · August 25, 2022 at 7:51 am
[url=http://prednisolone.fun/]prednisolone 5mg tablet price in india[/url] [url=http://drugstore.today/]pharmacy com[/url]
ElwoodGon · August 25, 2022 at 7:54 am
[url=http://onlinepharmacy.media/]mexican pharmacy what to buy[/url]
AnnaCounk · August 25, 2022 at 7:56 am
[url=https://lasix.wtf/]buy laxis with mastercard[/url]
RodneyTab · August 25, 2022 at 8:18 am
[url=http://hydroxychloroquine.ink/]hydroxychloroquine 70 mg[/url]
DarrylSef · August 25, 2022 at 8:23 am
[url=http://glucophage.icu/]glucophage uk[/url] [url=http://retinoa.xyz/]retino 0.025 gel[/url]
AlanCounk · August 25, 2022 at 8:36 am
[url=https://atomoxetine.sbs/]purchase strattera online[/url] [url=https://modafinil.durban/]how to order modafinil[/url] [url=https://fluoxetine.fun/]prozac fluoxetine[/url] [url=https://accutane.click/]buy accutane online without prescription[/url] [url=https://viagravtabs.monster/]can you buy viagra without a prescription[/url] [url=https://hydroxychloroquine.business/]plaquenil generic cost[/url] [url=https://ventolin.click/]buy ventolin over the counter uk[/url] [url=https://diflucan.sbs/]canadian pharmacy diflucan[/url]
JimCounk · August 25, 2022 at 8:37 am
[url=https://lisinopril.site/]lisinopril 10 mg cost[/url]
RodneyTab · August 25, 2022 at 8:53 am
[url=http://seroquel.fun/]buy seroquel[/url]
NickCounk · August 25, 2022 at 9:12 am
[url=https://viagravtabs.monster/]where can you get women’s viagra[/url]
ElwoodGon · August 25, 2022 at 9:15 am
[url=http://cialiswtab.quest/]best tadalafil in india[/url]
TommyHepsy · August 25, 2022 at 9:27 am
[url=https://trazodone.icu/]buy trazodone online[/url]
Estebanguall · August 25, 2022 at 9:28 am
[url=https://vermox.fun/]vermox tablets australia[/url]
Samuelraisk · August 25, 2022 at 9:32 am
[url=https://onlinepharmacy.download/]pharmacy wholesalers canada[/url]
RobertFoold · August 25, 2022 at 9:32 am
[url=https://flagyl.site/]online medicine flagyl[/url]
BooCounk · August 25, 2022 at 9:41 am
[url=https://cephalexin.guru/]keflex online purchase[/url]
ElwoodGon · August 25, 2022 at 9:43 am
[url=http://dapoxetine.fun/]where to buy dapoxetine online[/url]
Estebanguall · August 25, 2022 at 9:50 am
[url=https://proscar.site/]propecia tablets india[/url]
WimCounk · August 25, 2022 at 9:56 am
[url=http://modafinilmedicine.com/]generic provigil cost[/url]
JaneCounk · August 25, 2022 at 10:04 am
[url=http://orlistat.fun/]orlistat 120 price in india[/url]
IvyCounk · August 25, 2022 at 10:07 am
[url=http://orlistat.life/]can i buy xenical on line[/url] [url=http://atomoxetine.sbs/]straterra order[/url] [url=http://fluoxetine.fun/]prozac[/url]
AlanCounk · August 25, 2022 at 10:37 am
[url=https://orlistat.life/]xenical cost australia[/url] [url=https://lasix.wtf/]lasix vs furosemide[/url] [url=https://viagra.monster/]sildenafil mexico cheapest[/url] [url=https://orlistat.fun/]orlistat for weight loss[/url]
NickCounk · August 25, 2022 at 10:37 am
[url=https://propecia.capetown/]propecia no prescription[/url]
TimothyThive · August 25, 2022 at 10:44 am
[url=http://proscar.site/]cost of propecia generic[/url]
AnnaCounk · August 25, 2022 at 10:44 am
[url=https://onlinepharmacy.run/]internet pharmacy mexico[/url]
IvyCounk · August 25, 2022 at 10:45 am
[url=http://sildalis.fun/]sildalis 120 mg order canadian pharmacy[/url] [url=http://diflucan.sbs/]diflucan 300 mg[/url] [url=http://orlistat.life/]orlistat 60[/url] [url=http://levofloxacin.site/]levaquin buy[/url] [url=http://accutane.wtf/]accutane capsule[/url] [url=http://doxycycline.network/]price of doxycycline[/url]
Samuelraisk · August 25, 2022 at 10:49 am
[url=https://levothyroxine.xyz/]synthroid 0.125mg tab[/url]
Charlesaduse · August 25, 2022 at 11:01 am
[url=http://inderal.site/]innopran coupon[/url]
ZakCounk · August 25, 2022 at 11:17 am
[url=http://orlistat.life/]xenical for sale[/url] [url=http://cymbalta.site/]discount cymbalta[/url] [url=http://diclofenac.fun/]diclofenac brand[/url]
MichaelGuabe · August 25, 2022 at 11:31 am
[url=http://seroquel.site/]seroquel over the counter[/url]
MarvinZem · August 25, 2022 at 11:35 am
[url=https://kamagra.fun/]kamagra 100mg uk[/url]
JasonCounk · August 25, 2022 at 11:49 am
[url=http://zovirax.fun/]acyclovir price 800 mg[/url]
JasonCounk · August 25, 2022 at 12:08 pm
[url=http://modafinil.durban/]modafinil uk paypal[/url]
KiaCounk · August 25, 2022 at 12:14 pm
[url=http://ventolin.fun/]proventil ventolin[/url]
JosephMaict · August 25, 2022 at 12:22 pm
[url=http://budesonide.run/]budesonide 3 mg price[/url] [url=http://avana.click/]buy generic dapoxetine[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide 25 mg coupon[/url]
TedCounk · August 25, 2022 at 12:51 pm
[url=http://lasix.wtf/]furosemide 20 mg for sale[/url]
AmyCounk · August 25, 2022 at 1:02 pm
[url=https://modafinil.run/]order modafinil online[/url]
RichardFaply · August 25, 2022 at 1:02 pm
[url=http://seroquel.fun/]seroquel sleep aid[/url] [url=http://prozac.media/]buying prozac online[/url] [url=http://levothyroxine.fun/]buy synthroid 75 mcg[/url] [url=http://onlinepharmacy.media/]cheap pharmacy no prescription[/url] [url=http://trazodone.fun/]trazodone 10mg price[/url] [url=http://prednisolone.fun/]order prednisolone online[/url] [url=http://diflucan.xyz/]diflucan price canada[/url] [url=http://hydroxyzine.fun/]can you buy atarax over the counter uk[/url]
RobertFoold · August 25, 2022 at 1:11 pm
[url=https://fildena.fun/]fildena 150 for sale[/url]
JaneCounk · August 25, 2022 at 1:21 pm
[url=http://orlistat.fun/]orlistat for sale australia[/url]
DenCounk · August 25, 2022 at 1:23 pm
[url=http://orlistat.fun/]buy orlistat australia[/url]
KimCounk · August 25, 2022 at 1:27 pm
[url=https://onlinepharmacy.run/]safe online pharmacies[/url]
DarrylSef · August 25, 2022 at 1:37 pm
[url=http://augmentin.business/]amoxicillin usa[/url] [url=http://allopurinol.xyz/]allopurinol 3 mg[/url] [url=http://budesonide.run/]budesonide 32 mcg[/url] [url=http://levothyroxine.fun/]synthroid 188[/url]
SamCounk · August 25, 2022 at 1:44 pm
[url=https://tadacip.xyz/]tadacip 10 mg price in india[/url] [url=https://methocarbamol.site/]robaxin[/url] [url=https://onlinepharmacy.run/]pharmacy rx[/url]
Curtisvibia · August 25, 2022 at 2:15 pm
[url=https://trazodone.fun/]100 mg trazodone[/url]
JudyCounk · August 25, 2022 at 2:22 pm
[url=https://doxycycline.network/]doxyciclin[/url]
MiclTek · August 25, 2022 at 2:22 pm
[url=http://prozac.media/]how much is prozac in mexico[/url]
TedCounk · August 25, 2022 at 2:24 pm
[url=http://tadacip.xyz/]tadacip usa[/url]
MaryCounk · August 25, 2022 at 2:37 pm
[url=https://ventolin.fun/]ventolin 90 mcg[/url] [url=https://cymbalta.site/]cymbalta 30mg[/url] [url=https://accutane.wtf/]buy generic accutane 40 mg[/url] [url=https://levitra.sbs/]levitra online uk[/url] [url=https://viagrahtabs.quest/]female viagra tablets[/url]
MiclTek · August 25, 2022 at 2:39 pm
[url=http://prednisolone.fun/]where can i buy prednisolone tablets[/url]
EvaCounk · August 25, 2022 at 2:42 pm
[url=https://viagravtabs.monster/]where to buy viagra safely[/url]
JaneCounk · August 25, 2022 at 2:43 pm
[url=http://onlinepharmacy.run/]uk pharmacy[/url]
Curtisvibia · August 25, 2022 at 2:44 pm
[url=https://levothyroxine.fun/]cheap synthroid[/url]
AshCounk · August 25, 2022 at 3:14 pm
[url=https://levaquin.store/]buy generic levaquin[/url] [url=https://erectafil.agency/]erectafil from india[/url] [url=https://glucophage.guru/]metformin online purchase[/url] [url=https://prednisone.digital/]where to buy prednisone over the counter[/url] [url=https://synthroid.sale/]synthroid 137 mg[/url] [url=https://budecortbudesonide.quest/]budesonide 9 mg cost[/url] [url=https://finasteride.directory/]buy propecia india[/url] [url=https://propranolol.directory/]inderal buy online[/url]
JudyCounk · August 25, 2022 at 3:21 pm
[url=https://orlistat.life/]orlistat buy[/url]
SueCounk · August 25, 2022 at 3:42 pm
[url=http://methocarbamol.site/]robaxin price south africa[/url]
TedCounk · August 25, 2022 at 3:51 pm
[url=http://viagrahtabs.quest/]buy viagra online pharmacy[/url]
WimCounk · August 25, 2022 at 3:53 pm
[url=http://amoxil.quest/]buy amoxil without prescription[/url]
RodneyTab · August 25, 2022 at 4:06 pm
[url=http://retinoa.xyz/]retino 0.25 cream[/url]
MiaCounk · August 25, 2022 at 4:15 pm
[url=http://celexa.cfd/]citalopram brand name uk[/url]
MaryCounk · August 25, 2022 at 4:18 pm
[url=https://ventolin.click/]buy ventolin on line[/url] [url=https://diflucan.sbs/]canadian order diflucan online[/url] [url=https://orlistat.fun/]cheap xenical nz[/url] [url=https://levofloxacin.life/]levaquin generic[/url]
Michaeldrist · August 25, 2022 at 4:20 pm
[url=http://trazodone.fun/]trazodone 50mg prescription cost[/url]
IvyCounk · August 25, 2022 at 4:24 pm
[url=http://sildalis.fun/]sildalis canada[/url] [url=http://hydroxychloroquine.business/]hydroxychloroquine 40 mg[/url] [url=http://doxycycline.network/]doxycycline pharmacy online[/url] [url=http://viagrahtabs.quest/]sildenafil gel 100mg[/url] [url=http://fluoxetine.life/]fluoxetine 20 mg buy online uk[/url] [url=http://sildalis.click/]sildalis 120 mg order usa pharmacy[/url] [url=http://motrin.site/]motrin 400 mg[/url] [url=http://dutasteride.fun/]cheap avodart[/url]
Estebanguall · August 25, 2022 at 4:24 pm
[url=https://prednisolone.fun/]prednisolone cost usa[/url]
TimothyThive · August 25, 2022 at 4:27 pm
[url=http://suhagra.fun/]suhagra price[/url]
RichardFaply · August 25, 2022 at 4:59 pm
[url=http://trazodone.icu/]trazodone[/url] [url=http://sildenafil.site/]viagra medicine online[/url] [url=http://hydroxychloroquine.makeup/]plaquenil generic name[/url] [url=http://allopurinol.icu/]allopurinol brand[/url] [url=http://albenza.icu/]albendazole canada[/url]
Estebanguall · August 25, 2022 at 5:08 pm
[url=https://zanaflex.site/]tizanidine buy online without rx[/url]
Samuelraisk · August 25, 2022 at 5:18 pm
[url=https://azithromycin.media/]buy zithromax online canada[/url]
AshCounk · August 25, 2022 at 5:26 pm
[url=https://robaxin1.com/]robaxin 750 uk[/url] [url=https://clopidogrel.shop/]clopidogrel drug[/url] [url=https://cialishtabs.shop/]order tadalafil 20mg[/url] [url=https://modafinil2022.com/]provigil nz[/url] [url=https://propranolol.shop/]2 propranolol[/url]
AlanCounk · August 25, 2022 at 5:42 pm
[url=https://cialiswtabs.monster/]cialis usa online[/url] [url=https://atomoxetine.sbs/]strattera 60 mg capsules[/url] [url=https://propecia.capetown/]best place to buy propecia online[/url] [url=https://zovirax.fun/]generic aciclovir[/url] [url=https://onlinepharmacy.run/]canada pharmacy 24h[/url] [url=https://viagra.monster/]buy viagra tablets in india[/url] [url=https://ampicillin.site/]where to buy ampicillin 500mg[/url]
WimCounk · August 25, 2022 at 5:44 pm
[url=http://zanaflex.guru/]zanaflex generic price[/url]
EyeCounk · August 25, 2022 at 5:46 pm
[url=http://sildalis.fun/]sildalis without prescription[/url] [url=http://modafinil.durban/]provigil 200 mg cost[/url]
Michaelemult · August 25, 2022 at 5:55 pm
[url=https://proscar.site/]finasteride 1mg nz[/url]
RodneyTab · August 25, 2022 at 5:57 pm
[url=http://albenza.business/]albenza drug[/url]
DarrylSef · August 25, 2022 at 6:40 pm
[url=http://trazodone.fun/]trazodone 75 mg tablets[/url] [url=http://cephalexin.icu/]keflex 500 mg cap[/url] [url=http://estrace.fun/]where can i buy estrace cream[/url] [url=http://suhagra.fun/]suhagra 100mg tablet price in india[/url] [url=http://flagyl.site/]where can i buy flagyl online[/url] [url=http://fildena.fun/]fildena 100 mg for sale[/url] [url=http://inderal.site/]propranolol 40mg buy[/url]
RichardFaply · August 25, 2022 at 6:57 pm
[url=http://finasteride.site/]pharmacy propecia[/url] [url=http://budesonide.run/]budesonide tablets australia[/url] [url=http://tamoxifen.fun/]nolvadex 1mg[/url]
Edgarlor · August 25, 2022 at 7:10 pm
[url=http://hydroxychloroquine.ink/]hydroxychloroquine sulfate oral[/url]
MichaelDwego · August 25, 2022 at 7:15 pm
[url=https://levothyroxine.fun/]best price for synthroid 100 mcg[/url]
UgoCounk · August 25, 2022 at 7:34 pm
[url=http://baclofen.shop/]can you buy baclofen over the counter[/url]
KimCounk · August 25, 2022 at 7:37 pm
[url=https://accutane.click/]accutane prescription[/url]
Charlesaduse · August 25, 2022 at 7:38 pm
[url=http://trental.xyz/]trental 400 tablet[/url]
KimCounk · August 25, 2022 at 7:41 pm
[url=https://modafinil.run/]how much is provigil[/url]
DavisMug · August 25, 2022 at 8:09 pm
[url=http://albenza.business/]how to get albendazole[/url]
IvyCounk · August 25, 2022 at 8:14 pm
[url=http://viagraotabs.quest/]viagra 40 mg[/url] [url=http://valtrex.fun/]how to buy valtrex online[/url] [url=http://fluoxetine.life/]fluoxetine cream[/url] [url=http://methocarbamol.site/]robaxin prescription medication[/url] [url=http://onlinepharmacy.run/]reputable canadian pharmacy[/url] [url=http://doxycycline.network/]doxycycline 100mg canada[/url]
Davidhup · August 25, 2022 at 8:20 pm
[url=https://cialiswtab.quest/]generic cialis 2019[/url]
EvaCounk · August 25, 2022 at 8:34 pm
[url=https://cialiswtabs.monster/]order cialis online usa[/url]
RichardFaply · August 25, 2022 at 8:42 pm
[url=http://onlinepharmacy.media/]northern pharmacy[/url] [url=http://flagyl.site/]generic flagyl over the counter[/url] [url=http://zanaflex.site/]otc zanaflex[/url] [url=http://trazodone.icu/]trazodone 9 mg[/url] [url=http://tamoxifen.fun/]can you buy nolvadex over the counter in south africa[/url] [url=http://drugstore.today/]cheapest pharmacy[/url] [url=http://levothyroxine.fun/]synthroid 137 mcg tablet[/url]
IvyCounk · August 25, 2022 at 8:44 pm
[url=http://levofloxacin.life/]levofloxacin[/url] [url=http://levitra.sbs/]best price on levitra[/url] [url=http://clopidogrel.site/]clopidogrel 75 mg tablet[/url] [url=http://ampicillin.site/]ampicillin us[/url] [url=http://sildalis.click/]sildalis india[/url] [url=http://modafinil.run/]modafinil 200mg pills[/url]
MarvinZem · August 25, 2022 at 8:47 pm
[url=https://flagyl.site/]oral flagyl[/url]
JackCounk · August 25, 2022 at 8:48 pm
[url=https://modafinil.durban/]modafinil australia prescription[/url]
DarrylSef · August 25, 2022 at 9:03 pm
[url=http://provigil.life/]buy modafinil australia paypal[/url] [url=http://flagyl.site/]buy oral flagyl antibiotic[/url] [url=http://seroquel.site/]seroquel od[/url] [url=http://proscar.site/]proscar finasteride[/url] [url=http://albenza.icu/]albenza drug[/url] [url=http://augmentin.business/]amoxicillin 250 mg prices[/url]
MaryCounk · August 25, 2022 at 9:43 pm
[url=https://budesonide.site/]budesonide 0.5 mg[/url] [url=https://modafinil.run/]buy generic modafinil online[/url]
NickCounk · August 25, 2022 at 9:46 pm
[url=https://sildalis.click/]sildalis 120 mg[/url]
SamCounk · August 25, 2022 at 10:01 pm
[url=https://cymbalta.site/]buy cymbalta canada[/url] [url=https://hydroxychloroquine.business/]order plaquenil online[/url] [url=https://dexamethasone.site/]dexamethasone 4mg tabs[/url] [url=https://ampicillin.site/]ampicillin buy online uk[/url] [url=https://levofloxacin.site/]buy levaquin online[/url] [url=https://diflucan.sbs/]diflucan 75 mg[/url] [url=https://cialiswtabs.monster/]where can i get cialis in singapore[/url] [url=https://accutane.click/]accutane.com[/url]
EyeCounk · August 25, 2022 at 10:09 pm
[url=http://clopidogrel.site/]clopidogrel 18.75 mg[/url] [url=http://modafinil.durban/]how to get provigil in usa[/url] [url=http://sildalis.fun/]sildalis[/url] [url=http://accutane.wtf/]where to purchase accutane[/url] [url=http://levofloxacin.site/]antibiotic levaquin[/url] [url=http://malegra.fun/]malegra 100 cheap[/url] [url=http://diclofenac.fun/]voltaren gel 100 mg price[/url] [url=http://mebendazole.site/]vermox tablets where to buy[/url]
JosephMaict · August 25, 2022 at 10:11 pm
[url=http://triamterene.cfd/]triamterene generic[/url] [url=http://sildenafil.site/]best viagra tablet[/url] [url=http://albenza.icu/]albendazole price us[/url]
KimCounk · August 25, 2022 at 10:26 pm
[url=https://cymbalta.site/]best price cymbalta 60 mg[/url]
DenCounk · August 25, 2022 at 10:34 pm
[url=http://atomoxetine.sbs/]strattera 60 mg price[/url]
KimCounk · August 25, 2022 at 10:35 pm
[url=https://malegra.fun/]malegra dxt without prescription[/url]
DarrylSef · August 25, 2022 at 10:50 pm
[url=http://drugstore.today/]cheapest pharmacy for prescription drugs[/url] [url=http://onlinepharmacy.media/]online pharmacy australia paypal[/url] [url=http://kamagra.fun/]kamagra oral jelly online australia[/url] [url=http://cephalexin.icu/]cephalexin tablet price[/url] [url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide brand australia[/url]
TimothyThive · August 25, 2022 at 10:52 pm
[url=http://hydroxyzine.fun/]buy atarax online uk[/url]
BooCounk · August 25, 2022 at 10:52 pm
[url=https://trental.monster/]trental 400mg online[/url]
AshCounk · August 25, 2022 at 10:59 pm
[url=https://diclofenac.cfd/]voltaren over the counter canada[/url] [url=https://azithromycin.life/]azithromycin canada prescription[/url] [url=https://buyzanaflex.shop/]tizanidine 44[/url] [url=https://paxiltab.com/]buy paxil uk[/url] [url=https://robaxin.guru/]robaxin 1000 mg[/url]
RicIsose · August 25, 2022 at 11:02 pm
[url=https://antabuse.site/]antabuse prescription[/url] [url=https://fildena.fun/]fildena 100 mg online[/url] [url=https://tamoxifen.fun/]tamoxifen online india[/url] [url=https://seroquel.fun/]4715 seroquel[/url] [url=https://trazodone.fun/]trazodone online pharmacy[/url] [url=https://prozac.media/]how to get prozac[/url] [url=https://suhagra.fun/]suhagra tablet[/url] [url=https://azithromycin.media/]azithromycin usa[/url]
SueCounk · August 25, 2022 at 11:29 pm
[url=http://cymbalta.site/]purchase cymbalta online[/url]
TimothyThive · August 25, 2022 at 11:34 pm
[url=http://onlinepharmacy.win/]pharmacy online shopping usa[/url]
EyeCounk · August 25, 2022 at 11:40 pm
[url=http://albuterol.fun/]ventolin pharmacy[/url] [url=http://atomoxetine.sbs/]straterra order[/url] [url=http://dexamethasone.site/]dexamethasone 500 mg[/url] [url=http://zestoretic.fun/]zestoretic[/url]
TedCounk · August 25, 2022 at 11:56 pm
[url=http://motrin.site/]motrin 800 mg cost[/url]
WilliamWem · August 25, 2022 at 11:56 pm
[url=https://hydrochlorothiazide.cfd/]pharmacy price 25 mg hydrochlorothiazide[/url] [url=https://prednisone.network/]prednisone prescription cost[/url] [url=https://retinoa.xyz/]retino 0.025 cream[/url] [url=https://trazodone.icu/]how much is trazodone[/url] [url=https://augmentin.business/]augmentin 500 mg generic[/url] [url=https://vardenafil.network/]levitra us[/url] [url=https://fildena.fun/]fildena 100 mg price in india[/url] [url=https://tamoxifen.fun/]tamoxifen coupon[/url]
Edgarlor · August 25, 2022 at 11:57 pm
[url=http://estrace.fun/]estrace 2mg[/url]
JasonCounk · August 26, 2022 at 12:02 am
[url=http://diclofenac.fun/]diclofenac 1 gel coupon[/url]
AlanCounk · August 26, 2022 at 12:02 am
[url=https://methocarbamol.site/]robaxin in south africa[/url] [url=https://fluoxetine.fun/]fluoxetine 80 mg cost[/url] [url=https://silagra.site/]silagra 25 mg[/url] [url=https://celexa.cfd/]celexa price canada[/url] [url=https://mebendazole.site/]where can i get vermox[/url]
BooCounk · August 26, 2022 at 12:06 am
[url=https://diclofenac.digital/]diclofenac tablets for sale[/url]
MarkCounk · August 26, 2022 at 12:11 am
[url=https://nexium.cfd/]nexium price[/url]
Curtisvibia · August 26, 2022 at 12:16 am
[url=https://fildena.fun/]buy fildena 150 online[/url]
RodneyTab · August 26, 2022 at 12:19 am
[url=http://fildena.fun/]fildena 150 online[/url]
WimCounk · August 26, 2022 at 12:20 am
[url=http://flagyl.store/]how to buy flagyl online[/url]
JaneCounk · August 26, 2022 at 12:20 am
[url=http://diclofenac.fun/]voltaren 75 tablet[/url]
JosephMaict · August 26, 2022 at 12:21 am
[url=http://prozac.media/]fluoxetine 4356[/url] [url=http://trental.xyz/]order trental[/url] [url=http://prednisolone.fun/]prednisolone 3 mg[/url] [url=http://proscar.site/]how to get a propecia prescription[/url] [url=http://hydroxychloroquine.ink/]plaquenil cost in canada[/url] [url=http://albenza.icu/]cheap albenza[/url] [url=http://estrace.fun/]buy estrace without prescription[/url] [url=http://tamoxifen.fun/]tamoxifen for sale online[/url]
TeoCounk · August 26, 2022 at 12:30 am
[url=http://albuterol.fun/]albuterol 0.083 brand name[/url]
MiclTek · August 26, 2022 at 12:41 am
[url=http://cialiswtab.quest/]cialis over the counter usa[/url]
Michaelemult · August 26, 2022 at 12:50 am
[url=https://trental.xyz/]trental 400 order online[/url]
AnnaCounk · August 26, 2022 at 1:01 am
[url=https://modafinil.durban/]buy modafinil 200mg[/url]
JoeCounk · August 26, 2022 at 1:02 am
[url=https://accutane.click/]where can you get accutane[/url] [url=https://diflucan.sbs/]can you buy diflucan online[/url] [url=https://levofloxacin.life/]drug levaquin[/url] [url=https://fluoxetine.fun/]prozac 80mg price[/url] [url=https://viagravtabs.monster/]average cost of viagra[/url]
ElwoodGon · August 26, 2022 at 1:03 am
[url=http://prednisone.network/]prednisone 54899[/url]
YonCounk · August 26, 2022 at 1:14 am
[url=http://accutane.wtf/]accutane pill[/url]
AshCounk · August 26, 2022 at 1:44 am
[url=https://albuterol.golf/]pharmacy price for albuterol[/url] [url=https://prazosinp.com/]prazosin 5[/url] [url=https://vardenafil.boutique/]10mg levitra[/url] [url=https://sertraline.shop/]buy zoloft on line no prescription[/url] [url=https://orlistat.shop/]orlistat price in india online purchase[/url] [url=https://metformin.boutique/]metformin from india[/url] [url=https://estrace.live/]estrace cream generic price[/url]
ElwoodGon · August 26, 2022 at 1:47 am
[url=http://suhagra.fun/]buy suhagra 25mg online[/url]
EvaCounk · August 26, 2022 at 2:00 am
[url=https://ventolin.fun/]combivent cost price[/url]
ZakCounk · August 26, 2022 at 2:01 am
[url=http://tadacip.xyz/]where to buy tadacip online[/url] [url=http://viagraotabs.quest/]best prices for viagra in canada[/url] [url=http://silagra.site/]silagra 100 for sale[/url]
Edgarlor · August 26, 2022 at 2:01 am
[url=http://trental.xyz/]trental price[/url]
TimothyThive · August 26, 2022 at 2:07 am
[url=http://proscar.site/]proscar online usa[/url]
Edgarlor · August 26, 2022 at 2:11 am
[url=http://tamoxifen.fun/]buy cheap nolvadex[/url]
MiclTek · August 26, 2022 at 2:18 am
[url=http://hydrochlorothiazide.cfd/]hydrochlorothiazide 25 mg[/url]
LisaCounk · August 26, 2022 at 2:25 am
[url=https://zovirax.fun/]buy acyclovir 400 mg[/url]
MarvinZem · August 26, 2022 at 2:39 am
[url=https://glucophage.icu/]metformin hcl er[/url]
WilliamWem · August 26, 2022 at 2:40 am
[url=https://trental.xyz/]trental 400 mg tablets in india[/url] [url=https://hydroxyzine.fun/]atarax prescription uk[/url] [url=https://prednisolone.fun/]where to buy prednisolone[/url] [url=https://avana.click/]avana 2[/url] [url=https://suhagra.fun/]suhagra buy online[/url] [url=https://yasmin.monster/]yasmin pill australia cost[/url] [url=https://dapoxetine.fun/]avana 200[/url]
MarvinZem · August 26, 2022 at 2:47 am
[url=https://levothyroxine.fun/]synthroid 137 mg[/url]
Michaeldrist · August 26, 2022 at 2:53 am
[url=http://onlinepharmacy.win/]legit mexican pharmacy[/url]
YonCounk · August 26, 2022 at 2:55 am
[url=http://cialiswtabs.monster/]rx cialis canada[/url]
SamCounk · August 26, 2022 at 2:56 am
[url=https://silagra.site/]buy 100 mg silagra tablets[/url] [url=https://viagravtabs.monster/]how to get viagra without a prescription[/url] [url=https://zestoretic.fun/]zestoretic[/url] [url=https://doxycycline.network/]doxycycline iv[/url] [url=https://modafinil.run/]how to get modafinil in canada[/url]
KimCounk · August 26, 2022 at 3:11 am
[url=https://hydroxychloroquine.business/]plaquenil uk[/url]
SueCounk · August 26, 2022 at 3:15 am
[url=http://levofloxacin.life/]levaquin online[/url]
JimCounk · August 26, 2022 at 3:24 am
[url=https://hydroxychloroquine.business/]plaquenil uk[/url]
JoeCounk · August 26, 2022 at 3:30 am
[url=https://valtrex.fun/]cheap generic valtrex[/url] [url=https://levofloxacin.life/]levaquin pill[/url] [url=https://methocarbamol.site/]robaxin 750 generic[/url] [url=https://sildalis.fun/]sildalis tablets[/url] [url=https://diflucan.sbs/]diflucan australia[/url] [url=https://cialiswtabs.monster/]order generic cialis online uk[/url] [url=https://zestoretic.fun/]generic zestoretic[/url] [url=https://atomoxetine.sbs/]strattera 25 mg coupon[/url]
JimCounk · August 26, 2022 at 3:30 am
[url=https://viagravtabs.monster/]cheap viagra from canada[/url]
Edgarlor · August 26, 2022 at 3:33 am
[url=http://vardenafil.network/]levitra 5mg cost[/url]
UgoCounk · August 26, 2022 at 3:36 am
[url=http://robaxin.shop/]robaxin cost[/url]
Curtisvibia · August 26, 2022 at 3:38 am
[url=https://suhagra.fun/]suhagra tablet price[/url]
Estebanguall · August 26, 2022 at 3:41 am
[url=https://hydroxyzine.fun/]atarax 10mg tablet price[/url]
MichaelDwego · August 26, 2022 at 3:48 am
[url=https://allopurinol.xyz/]allopurinol rx[/url]
ElwoodGon · August 26, 2022 at 3:50 am
[url=http://inderal.site/]price of propranolol tablets[/url]
WilliamWem · August 26, 2022 at 4:19 am
[url=https://prednisone.network/]deltasone 5mg cost[/url] [url=https://tamoxifen.fun/]how to get tamoxifen[/url] [url=https://levothyroxine.xyz/]synthroid price without insurance[/url] [url=https://triamterene.cfd/]triamterene weight loss[/url] [url=https://glucophage.site/]metformin tablet[/url]
JaneCounk · August 26, 2022 at 4:36 am
[url=http://cialiswtabs.monster/]cialis generic cheap[/url]
ElwoodGon · August 26, 2022 at 4:39 am
[url=http://vardenafil.network/]buy generic vardenafil[/url]
TommyHepsy · August 26, 2022 at 4:39 am
[url=https://retinoa.xyz/]retino cream[/url]
Michaelemult · August 26, 2022 at 4:45 am
[url=https://trazodone.icu/]trazodone price australia[/url]
SamCounk · August 26, 2022 at 4:58 am
[url=https://orlistat.fun/]orlistat 120 mg online india[/url] [url=https://tadacip.xyz/]tadacip 20mg[/url] [url=https://nexium.cfd/]no precription cheap nexium[/url] [url=https://motrin.site/]motrin 1800[/url] [url=https://propecia.capetown/]propecia generic uk[/url] [url=https://lisinopril.site/]purchase lisinopril[/url]
ElwoodGon · August 26, 2022 at 5:00 am
[url=http://retinoa.xyz/]retino 0.025[/url]
Charlesaduse · August 26, 2022 at 5:14 am
[url=http://hydroxychloroquine.makeup/]hydroxychloroquine nz[/url]
EvaCounk · August 26, 2022 at 5:14 am
[url=https://clopidogrel.site/]cheap plavix generic[/url]
PaulCounk · August 26, 2022 at 5:29 am
[url=https://viagra.monster/]over the counter viagra 2018[/url]
TommyHepsy · August 26, 2022 at 5:35 am
[url=https://prednisone.network/]prednisone 1 tablet[/url]
MiaCounk · August 26, 2022 at 5:37 am
[url=http://albuterol.fun/]ventolin buy canada[/url]
Michaelemult · August 26, 2022 at 5:46 am
[url=https://glucophage.site/]metformin 500 mg price uk[/url]
MarvinZem · August 26, 2022 at 5:55 am
[url=https://prednisolone.fun/]prednisolone 15 mg tablet[/url]
MiaCounk · August 26, 2022 at 5:57 am
[url=http://zovirax.fun/]zovirax over the counter australia[/url]
RobertFoold · August 26, 2022 at 6:03 am
[url=https://vardenafil.network/]levitra super active[/url]
Charlesaduse · August 26, 2022 at 6:07 am
[url=http://albenza.business/]albendazole buy uk[/url]
AlanCounk · August 26, 2022 at 6:08 am
[url=https://viagravtabs.monster/]sildenafil soft tablets[/url] [url=https://zovirax.fun/]acyclovir 450[/url] [url=https://modafinil.durban/]modafinil prescription online[/url] [url=https://methocarbamol.site/]robaxin 500mg generic[/url] [url=https://ampicillin.site/]buy ampicillin uk[/url] [url=https://lisinopril.site/]lisinopril 12.5 20 g[/url] [url=https://budesonide.site/]budesonide 400 mg[/url]
WilliamWem · August 26, 2022 at 6:09 am
[url=https://cephalexin.icu/]500mg keflex[/url] [url=https://trental.xyz/]buy trental 400 mg online[/url] [url=https://finasteride.site/]propecia where to buy[/url] [url=https://seroquel.site/]seroquel 25 mg tablet[/url] [url=https://prednisone.network/]cost of prednisone pills[/url] [url=https://avana.click/]buy dapoxetine online usa[/url] [url=https://tamoxifen.fun/]how to buy nolvadex[/url] [url=https://yasmin.monster/]yasmin price india[/url]
Davidhup · August 26, 2022 at 6:12 am
[url=https://hydroxyzine.fun/]atarax tablets price[/url]
PaulCounk · August 26, 2022 at 6:15 am
[url=https://modafinil.durban/]400mg modafinil[/url]
Samuelraisk · August 26, 2022 at 6:26 am
[url=https://albenza.business/]albendazole uk[/url]
Edgarlor · August 26, 2022 at 6:27 am
[url=http://onlinepharmacy.download/]internet pharmacy manitoba[/url]
EvaCounk · August 26, 2022 at 6:27 am
[url=https://propecia.capetown/]buy finpecia[/url]
JackCounk · August 26, 2022 at 6:37 am
[url=https://orlistat.fun/]where to buy orlistat in usa[/url]
YonCounk · August 26, 2022 at 6:56 am
[url=https://zanaflex.live/]zanaflex 4mg price[/url]
AnnaCounk · August 26, 2022 at 6:56 am
[url=http://fildena.site/]fildena 100 for sale[/url]
JimCounk · August 26, 2022 at 7:03 am
[url=https://valacyclovir.xyz/]valtrex without presciption[/url]
DavisMug · August 26, 2022 at 7:07 am
[url=http://vardenafil.ink/]where can i buy levitra online[/url]
RichardFaply · August 26, 2022 at 7:10 am
[url=http://provigil.cfd/]modafinil online paypal[/url] [url=http://baclofen.site/]baclofen uk pharmacy[/url] [url=http://viagraltab.monster/]viagra cheap online[/url] [url=http://finpecia.life/]finasteride prices[/url] [url=http://buyzoloft.guru/]zoloft 10[/url] [url=http://cialishtabs.monster/]soft tabs cialis[/url] [url=http://cialisltab.quest/]cialis for sale in canada[/url]
DenCounk · August 26, 2022 at 7:14 am
[url=https://hydroxyzine.xyz/]buy generic atarax[/url]
EyeCounk · August 26, 2022 at 7:21 am
[url=https://ciprofloxacin.cfd/]ciprofloxacin price[/url] [url=https://lyrica.run/]buy generic lyrica online[/url] [url=https://plavix.fun/]online plavix[/url] [url=https://albuterol.wtf/]ventolin spray[/url] [url=https://nexium.digital/]best price for nexium capsule otc[/url]
Estebanguall · August 26, 2022 at 7:21 am
[url=http://doxycycline.sbs/]doxycycline 250[/url]
MarvinZem · August 26, 2022 at 7:42 am
[url=https://erectafil.cfd/]erectafil from india[/url]
AshCounk · August 26, 2022 at 7:57 am
[url=https://hydroxychloroquinext.com/]where to order plaquenil[/url] [url=https://albenza.digital/]albendazole price canada[/url] [url=https://cipro.guru/]ciprofloxacin 750 mg price[/url] [url=https://ampicillin.cyou/]antibiotic ampicillin[/url] [url=https://prednisolone.digital/]prednisolone price australia[/url] [url=https://lipitoratorvastatin.quest/]pfizer lipitor[/url] [url=https://disulfiram.guru/]disulfiram 500 mg tablets online[/url]
Estebanguall · August 26, 2022 at 8:28 am
[url=http://prozac.moscow/]cost of generic prozac[/url]
TedCounk · August 26, 2022 at 8:30 am
[url=https://xenical.fun/]xenical prescription australia[/url]
JasonCounk · August 26, 2022 at 8:34 am
[url=https://celexa.xyz/]citalopram blood pressure[/url]
WimCounk · August 26, 2022 at 8:40 am
[url=http://amoxicillin.golf/]amoxicillin price[/url]
JaneCounk · August 26, 2022 at 8:47 am
[url=http://valacyclovir.xyz/]can you order valtrex online[/url]
AmyCounk · August 26, 2022 at 8:51 am
[url=http://nexium.fun/]buying nexium in mexico[/url]
Edgarlor · August 26, 2022 at 8:55 am
[url=http://baclofen.site/]lioresa without prescription[/url]
RodneyTab · August 26, 2022 at 9:06 am
[url=http://diclofenac.life/]diclofenac 1.5[/url]
Michaelemult · August 26, 2022 at 9:06 am
[url=http://malegra.life/]malegra dxt online[/url]
TimothyThive · August 26, 2022 at 9:18 am
[url=https://diclofenac.life/]over the counter diclofenac uk[/url]
JimCounk · August 26, 2022 at 9:24 am
[url=https://baclofen.icu/]lioresal 10 mg tablets[/url]
WilliamWem · August 26, 2022 at 9:26 am
[url=https://accutane.pics/]buy accutane in canada[/url] [url=https://baclofen.site/]baclofen cream[/url] [url=https://cialisltab.quest/]tadalafil 20mg in india[/url] [url=https://flomax.life/]flomax 23497[/url] [url=https://zoloft.sbs/]zoloft prices australia[/url] [url=https://synthroid.wtf/]synthroid 125 mg coupon[/url] [url=https://prozac.moscow/]prozac over the counter uk[/url]
ZakCounk · August 26, 2022 at 9:30 am
[url=https://albuterol.wtf/]albuterol for sale canada[/url] [url=https://valacyclovir.xyz/]buy valtrex canada[/url] [url=https://valacyclovir.fun/]valtrex price in india[/url] [url=https://furosemide.boutique/]cost of furosemide 40mg tablets[/url] [url=https://strattera.icu/]strattera cost canada[/url]
JimCounk · August 26, 2022 at 9:52 am
[url=https://bactrim.xyz/]generic bactrim for sale[/url]
WimCounk · August 26, 2022 at 10:00 am
[url=http://finasteridetab.online/]buy finasteride 1mg india[/url]
Estebanguall · August 26, 2022 at 10:21 am
[url=http://prozac.moscow/]fluoxetine cost[/url]
Estebanguall · August 26, 2022 at 10:41 am
[url=http://propranolol.fun/]propranolol uk[/url]
ElwoodGon · August 26, 2022 at 10:41 am
[url=http://viagraltab.monster/]buy viagra mexico[/url]
Charlesaduse · August 26, 2022 at 10:44 am
[url=https://onlinepharmacy.moscow/]ez pharmacy[/url]
DarrylSef · August 26, 2022 at 10:45 am
[url=http://sildenafil.moscow/]cheap sildenafil pills[/url] [url=http://diclofenac.life/]voltaren 2.32 gel 100g[/url] [url=http://augmentin.fun/]buy amoxicillin uk[/url] [url=http://cialishtabs.monster/]discount generic cialis 20mg[/url] [url=http://buspar.life/]can i buy buspar online[/url] [url=http://doxycycline.sbs/]doxycycline 100mg coupon[/url] [url=http://lexapro.fun/]buy lexapro[/url]
AlanCounk · August 26, 2022 at 11:27 am
[url=http://malegra.xyz/]malegra 180 on line[/url] [url=http://nexium.fun/]nexium 40 mg buy online[/url] [url=http://trazodone.click/]trazodone pill 50 mg[/url] [url=http://onlinedrugstore.run/]online pharmacy discount code 2018[/url] [url=http://toradol.fun/]where can i buy toradol[/url]
ZakCounk · August 26, 2022 at 11:30 am
[url=https://toradol.fun/]buy toradol online[/url] [url=https://onlinepharmacy.ink/]cheapest pharmacy to fill prescriptions with insurance[/url] [url=https://furosemide.boutique/]lasix 30 mg[/url]
ElwoodGon · August 26, 2022 at 11:35 am
[url=http://accutane.pics/]accutane buy[/url]
AmyCounk · August 26, 2022 at 11:43 am
[url=http://retinoa.site/]retino 0.025 cream[/url]
Edgarlor · August 26, 2022 at 11:50 am
[url=http://proscar.fun/]propecia generic brand[/url]
Samuelraisk · August 26, 2022 at 11:52 am
[url=http://viagraltab.monster/]buy viagra online in australia[/url]
UgoCounk · August 26, 2022 at 12:14 pm
[url=http://prednisone.shop/]prednisone pill cost[/url]
Charlesaduse · August 26, 2022 at 12:28 pm
[url=https://finpecia.life/]cheap propecia singapore[/url]
TedCounk · August 26, 2022 at 12:36 pm
[url=https://baclofen.icu/]baclofen 10[/url]
Samuelraisk · August 26, 2022 at 12:47 pm
[url=http://erectafil.cfd/]erectafil 5mg[/url]
EvaCounk · August 26, 2022 at 1:01 pm
[url=http://onlinedrugstore.run/]online pharmacy quick delivery[/url]
IvyCounk · August 26, 2022 at 1:18 pm
[url=http://furosemide.boutique/]lasix 12.5[/url] [url=http://femaleviagra.xyz/]viagra online canada generic[/url] [url=http://retinoa.site/]retino cream[/url]
AshCounk · August 26, 2022 at 1:23 pm
[url=https://erectafil365.com/]erectafil 5mg[/url] [url=https://zanaflex.guru/]how much is tizanidine cost[/url] [url=https://celebrex.digital/]discount celebrex online[/url] [url=https://sixtabs.com/]buy clomid on line[/url] [url=https://valtrex.click/]can i buy valtrex over the counter uk[/url] [url=https://clomid.best/]clomid pills online[/url] [url=https://trazodone.guru/]trazodone order[/url] [url=https://colchicine100.com/]colchicine 500[/url]
AmyCounk · August 26, 2022 at 1:27 pm
[url=http://colchicine.fun/]colchicine 0.6 price[/url]
CarlCounk · August 26, 2022 at 1:51 pm
[url=http://retinoa.site/]retino gel[/url]
JosephMaict · August 26, 2022 at 1:52 pm
[url=https://erectafil.cfd/]erectafil 40 mg[/url] [url=https://buyzoloft.guru/]zoloft sale online[/url]
WimCounk · August 26, 2022 at 2:03 pm
[url=http://vardenafil.golf/]levitra soft tabs online[/url]
WilliamWem · August 26, 2022 at 2:08 pm
[url=https://lipitor.fun/]lipitor rx[/url] [url=https://retinoa.fun/]retino cream[/url] [url=https://flomax.life/]flomax cataract surgery[/url] [url=https://valtrex.run/]valtrex tablets[/url] [url=https://cialisltab.quest/]cialis uk pharmacy[/url] [url=https://gabapentin.sbs/]how much is gabapentin cost[/url] [url=https://atomoxetine.fun/]generic atomoxetine[/url] [url=https://onlinepharmacy.moscow/]online pharmacy com[/url]
EvaCounk · August 26, 2022 at 2:18 pm
[url=http://zoloft.durban/]zoloft pills price[/url]
EyeCounk · August 26, 2022 at 2:39 pm
[url=https://albuterol.wtf/]can i buy albuterol over the counter[/url] [url=https://xenical.fun/]where can i buy orlistat online[/url] [url=https://triamterene.xyz/]triamterene-hctz 37.5-25 mg cp[/url] [url=https://retinoa.site/]retino 0.05[/url] [url=https://valacyclovir.fun/]valtrex generic no prescription[/url] [url=https://zoloft.hair/]zoloft rx online[/url] [url=https://ivermectin.tattoo/]ivermectin price[/url]
IvyCounk · August 26, 2022 at 2:41 pm
[url=http://celexa.xyz/]buy citalopram 10mg online[/url] [url=http://baclofen.icu/]generic baclofen buy online[/url] [url=http://furosemide.boutique/]buy lasix cheap[/url] [url=http://malegra.xyz/]malegra 120[/url] [url=http://trimox.site/]augmentin 875 prescription[/url]
AnnaCounk · August 26, 2022 at 2:43 pm
[url=http://accutane.business/]accutane over the counter uk[/url]
IvyCounk · August 26, 2022 at 2:55 pm
[url=http://colchicine.fun/]colchicine acute gout[/url] [url=http://onlinepharmacy.ink/]online pharmacy meds[/url] [url=http://viagragtab.monster/]viagra 40 mg[/url] [url=http://trimox.site/]amoxicillin 500mg capsules for sale[/url]
DenCounk · August 26, 2022 at 3:03 pm
[url=https://budesonide.xyz/]budesonide 200 mcg[/url]
ElwoodGon · August 26, 2022 at 3:14 pm
[url=http://propecia.autos/]propecia 5mg tablets[/url]
JaneCounk · August 26, 2022 at 3:34 pm
[url=http://furosemide.boutique/]lasix water pill 20 mg buy no prescription[/url]
EyeCounk · August 26, 2022 at 3:44 pm
[url=https://zanaflex.run/]zanaflex 4mg tablets[/url] [url=https://ciprofloxacin.cfd/]ciprofloxacin 500mg coupon[/url] [url=https://zanaflex.live/]zanaflex pills[/url] [url=https://zoloft.durban/]zoloft discount[/url] [url=https://cialisbtabs.monster/]buy cialis online fast delivery[/url] [url=https://valacyclovir.xyz/]valtrex tablets for sale[/url] [url=https://furosemide.site/]furosemide 20 mg tablet cost[/url]
BooCounk · August 26, 2022 at 3:47 pm
[url=https://escitalopram.store/]lexapro for sale uk[/url]
JaneCounk · August 26, 2022 at 3:48 pm
[url=http://zanaflex.live/]how much is tizanidine[/url]
YonCounk · August 26, 2022 at 4:02 pm
[url=https://nexium.fun/]nexium prices in canada[/url]
TimothyThive · August 26, 2022 at 4:13 pm
[url=https://doxycycline.sbs/]generic for doxycycline[/url]
MichaelDwego · August 26, 2022 at 4:14 pm
[url=https://wellbutrin.site/]bupropion drug[/url]
Estebanguall · August 26, 2022 at 4:33 pm
[url=http://valtrex.run/]buy valtrex usa[/url]
WilliamWem · August 26, 2022 at 4:42 pm
[url=https://propranolol.fun/]innopran xl cost[/url] [url=https://proscar.fun/]propecia cheapest no prescription[/url] [url=https://anafranil.fun/]anafranil generic cost[/url] [url=https://retinoa.fun/]retino 05 cream[/url]
DavisMug · August 26, 2022 at 4:46 pm
[url=http://propecia.autos/]propecia price usa[/url]
SueCounk · August 26, 2022 at 4:48 pm
[url=http://zestoretic.xyz/]prinzide zestoretic[/url]
JackCounk · August 26, 2022 at 4:51 pm
[url=https://zoloft.durban/]generic zoloft 100mg[/url]
RicIsose · August 26, 2022 at 4:56 pm
[url=https://budesonide.sbs/]otc budesonide[/url] [url=https://cipro.sbs/]buy cipro 500mg[/url] [url=https://provigil.cfd/]how to get modafinil in australia[/url] [url=https://valtrex.run/]online drugs valtrex[/url] [url=https://propecia.autos/]propecia 25[/url] [url=https://isotretinoin.life/]accutane prescription uk[/url] [url=https://sildenafil.moscow/]genuine viagra prices[/url]
Samuelraisk · August 26, 2022 at 5:05 pm
[url=http://synthroid.fun/]drug synthroid[/url]
Michaelemult · August 26, 2022 at 5:18 pm
[url=http://celebrex.life/]price of celebrex 100mg[/url]
DarrylSef · August 26, 2022 at 5:33 pm
[url=http://synthroid.wtf/]synthroid capsules[/url] [url=http://lopressor.xyz/]lopressor 25 generic[/url] [url=http://cialisltab.quest/]cost of cialis with insurance[/url] [url=http://tadacip.works/]buy tadacip online uk[/url] [url=http://prednisone.moscow/]prednisone 5052[/url] [url=http://finasteride.fun/]how to get a prescription for propecia[/url] [url=http://buyzoloft.guru/]zoloft without script[/url]
TommyHepsy · August 26, 2022 at 5:47 pm
[url=https://propranolol.fun/]propranolol buy online[/url]
JimCounk · August 26, 2022 at 5:48 pm
[url=https://baclofen.icu/]baclofen 10 mg pill[/url]
SamCounk · August 26, 2022 at 5:49 pm
[url=http://trazodone.click/]desyrel 150 mg[/url] [url=http://viagrattab.quest/]seldenafil[/url] [url=http://fildena.site/]where to buy fildena 100[/url] [url=http://plavix.fun/]plavix buy online usa[/url] [url=http://malegra.xyz/]malegra fxt in india[/url] [url=http://colchicine.fun/]cheapest colchicine generic[/url]
UgoCounk · August 26, 2022 at 5:50 pm
[url=http://modafiniltab.com/]where can i get modafinil[/url]
SueCounk · August 26, 2022 at 5:51 pm
[url=http://erythromycin.fun/]erythromycin 500 mg tablet price[/url]
JosephMaict · August 26, 2022 at 5:53 pm
[url=https://atomoxetine.fun/]100mg strattera[/url] [url=https://cialishtabs.monster/]cialis brand online[/url] [url=https://diclofenac.life/]voltaren 5mg[/url] [url=https://doxycycline.sbs/]doxycycline 1000mg[/url]
Michaeldrist · August 26, 2022 at 5:54 pm
[url=http://doxycycline.sbs/]buy doxycycline online[/url]
MiclTek · August 26, 2022 at 5:56 pm
[url=http://propecia.lol/]propecia costs australia[/url]
JimCounk · August 26, 2022 at 5:56 pm
[url=https://onlinepharmacy.ink/]pharmacy com[/url]
MarvinZem · August 26, 2022 at 5:57 pm
[url=https://synthroid.wtf/]synthroid 0.112 mg[/url]
ElwoodGon · August 26, 2022 at 6:00 pm
[url=http://propecia.lol/]where can i buy propecia in australia[/url]
Estebanguall · August 26, 2022 at 6:06 pm
[url=http://synthroid.wtf/]synthroid 225 online[/url]
KiaCounk · August 26, 2022 at 6:11 pm
[url=https://baclofen.icu/]how much is baclofen 10 mg[/url]
ElwoodGon · August 26, 2022 at 6:21 pm
[url=http://finasteride.fun/]finasteride 5mg over the counter[/url]
RodneyTab · August 26, 2022 at 6:35 pm
[url=http://mebendazole.fun/]where to buy vermox in canada[/url]
EyeCounk · August 26, 2022 at 6:36 pm
[url=https://amitriptyline.fun/]12.5 mg amitriptyline[/url] [url=https://strattera.icu/]buy strattera 40mg online[/url] [url=https://xenical.fun/]orlistat online cheap[/url]
RicIsose · August 26, 2022 at 6:47 pm
[url=https://prozac.moscow/]prozac rx[/url] [url=https://budesonide.sbs/]budesonide cost[/url] [url=https://cytotec.best/]cytotec pill[/url] [url=https://isotretinoin.life/]accutane singapore buy[/url]
MiclTek · August 26, 2022 at 7:25 pm
[url=http://zoloft.sbs/]cost for zoloft[/url]
JoeCounk · August 26, 2022 at 7:30 pm
[url=https://ciprofloxacin.cfd/]ciprofloxacin 100mg[/url] [url=https://zoloft.durban/]5mg zoloft generic pill[/url] [url=https://accutane.business/]how to get accutane online[/url] [url=https://nexium.fun/]cheapest nexium otc[/url] [url=https://femaleviagra.xyz/]viagra original[/url] [url=https://metformin.trade/]metformin online without prescription[/url]
KiaCounk · August 26, 2022 at 7:41 pm
[url=https://viagraztab.quest/]where can you get female viagra[/url]
MiclTek · August 26, 2022 at 7:43 pm
[url=http://lexapro.fun/]lexapro 15 mg tablets[/url]
JasonCounk · August 26, 2022 at 7:46 pm
[url=https://onlinepharmacy.ink/]onlinecanadianpharmacy 24[/url]
YonCounk · August 26, 2022 at 7:58 pm
[url=https://ivermectin.tattoo/]generic ivermectin[/url]
Samuelraisk · August 26, 2022 at 8:27 pm
[url=http://methocarbamol.xyz/]robaxin online canada[/url]
LisaCounk · August 26, 2022 at 8:35 pm
[url=https://modafinil.pics/]modafinil 50 mg tablet[/url]
Jameseloro · August 26, 2022 at 8:38 pm
[url=http://cialisltab.quest/]rx tadalafil[/url] [url=http://erectafil.cfd/]erectafil 10[/url] [url=http://malegra.life/]buy malegra 100 online[/url] [url=http://augmentin.fun/]augmentin medication[/url] [url=http://synthroid.business/]synthroid prices[/url] [url=http://cytotec.best/]cytotec canada[/url] [url=http://prednisone.moscow/]best pharmacy prednisone[/url]
SamCounk · August 26, 2022 at 8:47 pm
[url=http://ivermectin.tattoo/]stromectol for sale[/url] [url=http://onlinepharmacy.ink/]cheapest pharmacy for prescriptions[/url] [url=http://femaleviagra.xyz/]can you buy viagra in europe[/url] [url=http://celexa.site/]buy celexa 20 mg[/url]
MiaCounk · August 26, 2022 at 9:11 pm
[url=http://plavix.fun/]plavix price[/url]
MarvinZem · August 26, 2022 at 9:26 pm
[url=https://buyzoloft.guru/]online prescription zoloft 25mg[/url]
MiaCounk · August 26, 2022 at 9:35 pm
[url=http://erythromycin.fun/]erythromycin pills[/url]
TimothyThive · August 26, 2022 at 9:38 pm
[url=https://accutane.pics/]accutane online without prescription[/url]
AshCounk · August 26, 2022 at 9:47 pm
[url=https://diflucan.solutions/]diflucan over the counter canada[/url] [url=https://amitriptyline.shop/]buy amitriptyline 25mg[/url] [url=https://finpecia.shop/]propecia 0.5 daily[/url] [url=https://baclofen.fun/]lioresa; without prescription[/url] [url=https://fluoxetine.boutique/]prozac 40[/url] [url=https://antabusedisulf.com/]antibuse[/url] [url=https://zofran.digital/]zofran medicine over the counter[/url]
MaryCounk · August 26, 2022 at 9:54 pm
[url=https://ciprofloxacin.cfd/]cipro 250 mg coupon[/url] [url=https://strattera.icu/]buy strattera online uk[/url] [url=https://retinoa.site/]retino gel[/url] [url=https://colchicine.fun/]colchicine pill[/url] [url=https://lyrica.run/]where can i buy lyrica[/url] [url=https://femaleviagra.xyz/]order sildenafil canada[/url] [url=https://malegra.xyz/]malegra 100 tablet[/url]
WimCounk · August 26, 2022 at 10:04 pm
[url=http://proscar.boutique/]buy proscar online australia[/url]
Davidhup · August 26, 2022 at 10:09 pm
[url=https://sildenafil.moscow/]brand name viagra online[/url]
Samuelraisk · August 26, 2022 at 10:15 pm
[url=http://methocarbamol.xyz/]robaxin 300 mg[/url]
CarlCounk · August 26, 2022 at 10:22 pm
[url=http://triamterene.xyz/]triamterene-hctz 37.5-25 mg cp[/url]
JackCounk · August 26, 2022 at 11:05 pm
[url=https://erythromycin.fun/]buying erythromycin online[/url]
JudyCounk · August 26, 2022 at 11:24 pm
[url=http://baclofen.icu/]baclofen 40 mg[/url]
MiclTek · August 26, 2022 at 11:34 pm
[url=http://diclofenac.life/]buy diclofenac sodium[/url]
Jameseloro · August 26, 2022 at 11:43 pm
[url=http://anafranil.fun/]clomipramine anafranil[/url] [url=http://finasteride.fun/]propecia generic[/url] [url=http://zoloft.sbs/]zoloft cost generic[/url]
TeoCounk · August 26, 2022 at 11:55 pm
[url=https://erythromycin.fun/]erythromycin 250[/url]
RodneyTab · August 27, 2022 at 12:15 am
[url=http://malegra.life/]generic malegra dxt[/url]
MarkCounk · August 27, 2022 at 12:16 am
[url=https://onlinedrugstore.run/]canadian pharmacy prices[/url]
MichaelGuabe · August 27, 2022 at 12:22 am
[url=https://clomid.moscow/]clomid coupon[/url]
MaryCounk · August 27, 2022 at 12:26 am
[url=https://levitra.fun/]levitra 3000mg[/url] [url=https://modafinil.pics/]modafinil tablets india[/url] [url=https://zestoretic.xyz/]zestoretic 20 12.5[/url] [url=https://valacyclovir.xyz/]valtrex 1000 mg cost[/url] [url=https://accutane.business/]accutane prescription cost[/url] [url=https://hydroxyzine.xyz/]atarax buy[/url] [url=https://ciprofloxacin.cfd/]cipro online pharmacy[/url] [url=https://azithromycin.wtf/]zithromax 500 mg tablet[/url]
MaryCounk · August 27, 2022 at 12:29 am
[url=https://erythromycin.fun/]erythromycin topical gel[/url] [url=https://silagra.life/]buy cheap silagra[/url] [url=https://valacyclovir.fun/]valtrex over counter[/url] [url=https://zoloft.hair/]price of zoloft[/url]
DavisMug · August 27, 2022 at 12:50 am
[url=http://proscar.fun/]canadian pharmacy propecia[/url]
DavisMug · August 27, 2022 at 12:51 am
[url=http://prednisolone.site/]prednisolone drug[/url]
MarvinZem · August 27, 2022 at 12:54 am
[url=https://tadacip.works/]buy tadacip 10[/url]
MarkCounk · August 27, 2022 at 12:59 am
[url=https://ciprofloxacin.cfd/]buy generic cipro[/url]
Michaelemult · August 27, 2022 at 1:14 am
[url=http://propranolol.fun/]propranolol brand name in india[/url]
MarvinZem · August 27, 2022 at 1:14 am
[url=https://valtrex.run/]cost for valtrex[/url]
JaneCounk · August 27, 2022 at 1:16 am
[url=http://zanaflex.live/]zanaflex otc[/url]
MarkCounk · August 27, 2022 at 1:25 am
[url=https://albuterol.wtf/]athsma inhalers no prescription[/url]
Curtisvibia · August 27, 2022 at 1:26 am
[url=https://diclofenac.life/]can i buy diclofenac from mexico[/url]
JosephMaict · August 27, 2022 at 1:29 am
[url=https://proscar.fun/]proscar price[/url] [url=https://cytotec.best/]misoprostol price in india online[/url] [url=https://budesonide.sbs/]budesonide[/url] [url=https://propecia.autos/]how do i get propecia[/url] [url=https://cipro.sbs/]cipro 500mg tablet cost[/url] [url=https://modafinil.hair/]modafinil where to order[/url] [url=https://isotretinoin.life/]accutane canada online[/url]
KimCounk · August 27, 2022 at 1:31 am
[url=https://zoloft.hair/]zoloft 50 mg price[/url]
JimCounk · August 27, 2022 at 1:35 am
[url=https://plavix.fun/]buy cheap clopidogrel[/url]
UgoCounk · August 27, 2022 at 1:38 am
[url=http://diflucan.shop/]diflucan 150 mg over the counter[/url]
DarrylSef · August 27, 2022 at 1:41 am
[url=http://valtrex.run/]valtrex canadian pharmacy[/url] [url=http://wellbutrin.site/]wellbutrin no precription[/url] [url=http://onlinepharmacy.moscow/]sure save pharmacy[/url] [url=http://vardenafil.download/]levitra 250 mg[/url] [url=http://propecia.autos/]propecia drug[/url]
MaryCounk · August 27, 2022 at 1:50 am
[url=https://zanaflex.run/]zanaflex 4mg online[/url] [url=https://amitriptyline.fun/]amitriptyline 12.5 mg[/url] [url=https://valacyclovir.xyz/]valtrex medication online[/url] [url=https://viagrattab.quest/]purchase viagra in australia[/url]
AmyCounk · August 27, 2022 at 2:02 am
[url=http://zoloft.durban/]zoloft generic 100mg[/url]
EyeCounk · August 27, 2022 at 2:03 am
[url=https://levitra.fun/]brand name levitra online[/url] [url=https://fildena.site/]buy fildena india[/url] [url=https://furosemide.boutique/]furosemide tablets uk[/url] [url=https://cialisetab.quest/]cialis online mexico[/url] [url=https://modafinil.pics/]buy provigil online[/url] [url=https://zanaflex.live/]buy cheap zanaflex[/url] [url=https://trazodone.click/]desyrel pill[/url] [url=https://toradol.fun/]toradol for migraines[/url]
ElwoodGon · August 27, 2022 at 2:13 am
[url=http://budesonide.sbs/]budesonide 1mg[/url]
KiaCounk · August 27, 2022 at 2:30 am
[url=https://plavix.fun/]plavix buy online[/url]
JaneCounk · August 27, 2022 at 2:38 am
[url=http://triamterene.xyz/]triamterene brand name[/url]
ElwoodGon · August 27, 2022 at 3:03 am
[url=http://synthroid.wtf/]synthroid mexico pharmacy[/url]
EyeCounk · August 27, 2022 at 3:06 am
[url=https://furosemide.site/]lasix medicine cost[/url] [url=https://fildena.site/]buy fildena india[/url] [url=https://erythromycin.fun/]erythromycin 500mg tablets[/url] [url=https://zoloft.durban/]5 mg zoloft 30 pills[/url] [url=https://ciprofloxacin.cfd/]cipro cost canada[/url] [url=https://nexium.fun/]nexium 20 mg price[/url]
MarkCounk · August 27, 2022 at 3:09 am
[url=https://trental.fun/]trental 400mg price[/url]
TedCounk · August 27, 2022 at 3:29 am
[url=https://zanaflex.run/]tizanidine 2mg capsules[/url]
JosephMaict · August 27, 2022 at 3:31 am
[url=https://doxycycline.sbs/]doxycycline cost[/url] [url=https://buspar.life/]how much is buspar[/url] [url=https://lipitor.fun/]lipitor for sale[/url] [url=https://propranolol.fun/]propranolol online[/url] [url=https://synthroid.fun/]buy synthroid 137 mcg[/url] [url=https://mebendazole.fun/]how to get vermox[/url]
Jameseloro · August 27, 2022 at 3:38 am
[url=http://cytotec.best/]where can i buy cytotec[/url] [url=http://augmentin.fun/]amoxicillin cost in india[/url] [url=http://celebrex.life/]celebrex 200 mg discount[/url]
Michaeldrist · August 27, 2022 at 3:46 am
[url=http://viagraltab.monster/]viagra online mastercard[/url]
Davidhup · August 27, 2022 at 3:47 am
[url=https://lexapro.fun/]lexapro medicine[/url]
RobertFoold · August 27, 2022 at 3:50 am
[url=https://gabapentin.sbs/]buy gabapentin 100mg online uk[/url]
SueCounk · August 27, 2022 at 3:59 am
[url=http://ciprofloxacin.cfd/]ciprofloxacin 250mg tablets[/url]
AshCounk · August 27, 2022 at 4:15 am
[url=https://glucophage.site/]metformin 500mg with out presciption[/url] [url=https://diflucanx.online/]can you buy diflucan over the counter uk[/url] [url=https://estrace.store/]estrace 1 cream[/url] [url=https://acyclovir.company/]acyclovir 800 mg coupon[/url] [url=https://trimox.today/]buy amoxicillin otc[/url]
ElwoodGon · August 27, 2022 at 4:27 am
[url=http://lipitor.fun/]cost of lipitor[/url]
IvyCounk · August 27, 2022 at 4:27 am
[url=http://onlinepharmacy.ink/]canadian pharmacy mall[/url] [url=http://ivermectin.tattoo/]how much is ivermectin[/url] [url=http://onlinedrugstore.run/]reliable canadian pharmacy[/url] [url=http://viagragtab.monster/]viagra over the counter[/url] [url=http://silagra.life/]silagra 100[/url] [url=http://hydroxyzine.xyz/]buy atarax online[/url]
AlanCounk · August 27, 2022 at 4:33 am
[url=http://ciprofloxacin.cfd/]cipro 250 mg coupon[/url] [url=http://cialisbtabs.monster/]tadalafil soft gel[/url] [url=http://amitriptyline.fun/]elavil 1230[/url] [url=http://hydroxyzine.xyz/]atarax pills[/url] [url=http://erythromycin.fun/]generic erythromycin price[/url] [url=http://triamterene.xyz/]triamterene for sale[/url] [url=http://metformin.trade/]metformin 1mg[/url] [url=http://viagrattab.quest/]viagra cialis levitra online[/url]
KiaCounk · August 27, 2022 at 4:48 am
[url=https://xenical.fun/]orlistat brand name[/url]
TedCounk · August 27, 2022 at 4:52 am
[url=https://bactrim.xyz/]buy bactrim pills[/url]
PaulCounk · August 27, 2022 at 4:56 am
[url=https://amitriptyline.fun/]amitriptyline elavil[/url]
YonCounk · August 27, 2022 at 5:02 am
[url=https://ivermectin.tattoo/]stromectol cream[/url]
KimCounk · August 27, 2022 at 5:17 am
[url=https://silagra.life/]silagra 50 mg[/url]
RobertFoold · August 27, 2022 at 5:29 am
[url=https://isotretinoin.life/]accutane 2009[/url]
MichaelGuabe · August 27, 2022 at 5:30 am
[url=https://prednisone.moscow/]prednisone tablets 5 mg[/url]
MichaelDwego · August 27, 2022 at 5:39 am
[url=https://cialishtabs.monster/]tadalafil 5 mg mexico[/url]
PaulCounk · August 27, 2022 at 5:43 am
[url=https://lyrica.run/]lyrica online canada[/url]
RichardFaply · August 27, 2022 at 6:12 am
[url=http://augmentin.fun/]generic amoxicillin cost[/url] [url=http://propranolol.fun/]propranolol 10 mg tablet price[/url] [url=http://prozac.moscow/]where to order prozac without prescription[/url] [url=http://cytotec.best/]cytotec cost in india[/url] [url=http://finpecia.life/]propecia generic coupon[/url] [url=http://buspar.life/]buspar 15 mg tablet[/url] [url=http://synthroid.wtf/]canadian pharmacy synthroid 100mcg[/url] [url=http://prednisolone.site/]prednisolone 5mg tablets price[/url]
Edgarlor · August 27, 2022 at 6:21 am
[url=http://synthroid.wtf/]synthroid 112 mg[/url]
TimothyThive · August 27, 2022 at 6:29 am
[url=https://atomoxetine.fun/]cheap generic strattera[/url]
AnnaCounk · August 27, 2022 at 6:35 am
[url=http://bactrim.xyz/]buy bactrim ds[/url]
Jameseloro · August 27, 2022 at 6:47 am
[url=http://synthroid.business/]cost of generic synthroid[/url] [url=http://anafranil.fun/]anafranil 25 mg price[/url] [url=http://buspar.life/]buspar 5mg tablets[/url] [url=http://synthroid.wtf/]hair loss synthroid[/url] [url=http://flomax.life/]flomax for sale[/url] [url=http://propranolol.fun/]inderal 80[/url] [url=http://viagraltab.monster/]where can i buy viagra over the counter in usa[/url]
SueCounk · August 27, 2022 at 6:48 am
[url=http://furosemide.boutique/]furosemide 20mg tablets cost[/url]
Michaeldrist · August 27, 2022 at 6:48 am
[url=http://propranolol.fun/]buy propranolol over the counter[/url]
Michaeldrist · August 27, 2022 at 6:51 am
[url=http://methocarbamol.xyz/]robaxin 750 mg tabs[/url]
EyeCounk · August 27, 2022 at 6:55 am
[url=https://accutane.business/]buy accutane cheap online[/url] [url=https://lyrica.run/]can you buy lyrica online[/url] [url=https://femaleviagra.xyz/]viagra generic viagra[/url] [url=https://malegra.xyz/]malegra dxt 130 mg[/url]
Curtisvibia · August 27, 2022 at 7:02 am
[url=https://retinoa.fun/]retino 0.25 cream price[/url]
JasonCounk · August 27, 2022 at 7:05 am
[url=https://accutane.business/]accutane canada[/url]
IvyCounk · August 27, 2022 at 7:14 am
[url=http://amitriptyline.fun/]endep tablets[/url] [url=http://cialisetab.quest/]cialis buy cheap[/url]
TedCounk · August 27, 2022 at 7:19 am
[url=https://toradol.fun/]toradol[/url]
TimothyThive · August 27, 2022 at 7:22 am
[url=https://gabapentin.sbs/]2400 mg gabapentin[/url]
KimCounk · August 27, 2022 at 7:31 am
[url=https://azithromycin.wtf/]zithromax online usa[/url]
ElwoodGon · August 27, 2022 at 8:10 am
[url=http://propecia.lol/]finasteride 1mg discount coupon[/url]
MarvinZem · August 27, 2022 at 8:14 am
[url=https://synthroid.business/]synthroid 25 mcg price[/url]
JoeCounk · August 27, 2022 at 8:18 am
[url=https://nexium.digital/]buy nexium uk[/url] [url=https://viagragtab.monster/]buy viagra online south africa[/url]
RichardFaply · August 27, 2022 at 8:22 am
[url=http://clomid.moscow/]clomid online from india[/url] [url=http://cialishtabs.monster/]how much is 5mg cialis[/url] [url=http://methocarbamol.xyz/]robaxin 8 mg daily[/url]
KimCounk · August 27, 2022 at 8:28 am
[url=https://azithromycin.wtf/]zithromax pack[/url]
AlanCounk · August 27, 2022 at 8:37 am
[url=http://metformin.trade/]glucophage discount[/url] [url=http://viagraztab.quest/]sildenafil 5mg price[/url] [url=http://viagrattab.quest/]buy sildenafil 200mg[/url] [url=http://baclofen.icu/]baclofen for sale[/url] [url=http://zestoretic.xyz/]zestoretic 10 12.5[/url] [url=http://nexium.digital/]nexium 20mg price canada[/url] [url=http://celexa.xyz/]citalopram hbr 20 mg[/url] [url=http://strattera.icu/]how to buy strattera online[/url]
Curtisvibia · August 27, 2022 at 8:45 am
[url=https://zoloft.sbs/]zoloft 25 mg tablet[/url]
SueCounk · August 27, 2022 at 8:46 am
[url=http://onlinepharmacy.ink/]safe canadian pharmacy[/url]
ElwoodGon · August 27, 2022 at 8:58 am
[url=http://gabapentin.sbs/]gabapentin 1200[/url]
YonCounk · August 27, 2022 at 9:17 am
[url=https://amitriptyline.fun/]endep buy[/url]
Samuelraisk · August 27, 2022 at 9:22 am
[url=http://retinoa.fun/]retino gel[/url]
RicIsose · August 27, 2022 at 9:36 am
[url=https://methocarbamol.xyz/]where can you get robaxin[/url] [url=https://isotretinoin.life/]accutane from canada pharmacy[/url] [url=https://mebendazole.fun/]vermox tablets[/url] [url=https://vardenafil.ink/]levitra bayer[/url] [url=https://budesonide.sbs/]budesonide price in india[/url] [url=https://prednisolone.site/]buy prednisolone 5mg[/url] [url=https://prednisone.moscow/]prednisone without prescription.net[/url]
IvyCounk · August 27, 2022 at 9:42 am
[url=http://zanaflex.live/]tizanidine canadian pharmacy no prescription[/url] [url=http://zoloft.durban/]brand name zoloft price[/url] [url=http://viagraztab.quest/]rx viagra[/url] [url=http://onlinepharmacy.ink/]best online pharmacy india[/url] [url=http://viagrattab.quest/]sildenafil australia buy[/url] [url=http://nexium.digital/]nexium price australia[/url] [url=http://plavix.fun/]clopidogrel 18.75 mg[/url] [url=http://ivermectin.tattoo/]ivermectin online[/url]
PaulCounk · August 27, 2022 at 9:47 am
[url=https://toradol.fun/]buy toradol online with no prescription[/url]
SamCounk · August 27, 2022 at 9:54 am
[url=http://modafinil.pics/]buy modafinil 2019[/url] [url=http://furosemide.boutique/]buy lasix without presciption[/url] [url=http://amitriptyline.site/]amitriptyline generic cost[/url] [url=http://zanaflex.live/]buy generic zanaflex[/url]
Davidhup · August 27, 2022 at 10:00 am
[url=https://propecia.autos/]propecia price canada[/url]
DarrylSef · August 27, 2022 at 10:02 am
[url=http://zoloft.sbs/]50 zoloft[/url] [url=http://cialishtabs.monster/]generic tadalafil pills[/url] [url=http://tadacip.works/]tadacip 20 prescription[/url] [url=http://lexapro.fun/]lexapro for sale[/url] [url=http://celebrex.life/]celebrex.com[/url] [url=http://anafranil.fun/]anafranil 50 mg[/url] [url=http://gabapentin.sbs/]gabapentin cost of[/url]
TimothyThive · August 27, 2022 at 10:03 am
[url=https://synthroid.fun/]synthroid 225 mcg[/url]
RicIsose · August 27, 2022 at 10:03 am
[url=https://baclofen.site/]baclofen 25 mg price[/url] [url=https://synthroid.fun/]synthroid 0.075 mcg[/url] [url=https://propecia.lol/]finasteride price[/url] [url=https://anafranil.fun/]anafranil price in india[/url]
TimothyThive · August 27, 2022 at 10:10 am
[url=https://anafranil.fun/]anafranil generic[/url]
JackCounk · August 27, 2022 at 10:20 am
[url=https://toradol.fun/]toradol cost[/url]
JasonCounk · August 27, 2022 at 10:26 am
[url=https://fildena.site/]fildena 100 online[/url]
Michaelemult · August 27, 2022 at 10:27 am
[url=http://lexapro.fun/]otc lexapro[/url]
ElwoodGon · August 27, 2022 at 10:28 am
[url=http://budesonide.sbs/]budecort usa[/url]
JoeCounk · August 27, 2022 at 10:42 am
[url=https://bactrim.xyz/]bactrim price canada[/url] [url=https://levitra.fun/]levitra for sale canada[/url]
JudyCounk · August 27, 2022 at 10:47 am
[url=http://viagragtab.monster/]viagra-50mg[/url]
Michaelemult · August 27, 2022 at 10:47 am
[url=http://wellbutrin.site/]wellbutrin cost australia[/url]
JosephMaict · August 27, 2022 at 10:47 am
[url=https://isotretinoin.life/]roaccutane without a prescription[/url] [url=https://sildenafil.moscow/]sildenafil 100mg for sale uk[/url]
MichaelGuabe · August 27, 2022 at 10:48 am
[url=https://onlinepharmacy.moscow/]low cost online pharmacy[/url]
TommyHepsy · August 27, 2022 at 10:54 am
[url=https://synthroid.wtf/]synthroid 125 mcg cost[/url]
JaneCounk · August 27, 2022 at 10:58 am
[url=http://malegra.xyz/]malegra fxt[/url]
EvaCounk · August 27, 2022 at 11:02 am
[url=http://xenical.fun/]xenical 60 mg[/url]
Estebanguall · August 27, 2022 at 11:10 am
[url=http://malegra.life/]malegra fxt online[/url]
RichardFaply · August 27, 2022 at 11:17 am
[url=http://anafranil.fun/]anafranil online[/url] [url=http://modafinil.hair/]400mg modafinil[/url] [url=http://cialisltab.quest/]generic cialis cheapest price[/url] [url=http://finasteride.fun/]best propecia prices[/url]
JaneCounk · August 27, 2022 at 11:20 am
[url=http://valacyclovir.fun/]valtrex 500 mg tablet[/url]
MiaCounk · August 27, 2022 at 11:23 am
[url=http://femaleviagra.xyz/]how to order sildenafil online[/url]
ZakCounk · August 27, 2022 at 11:23 am
[url=https://cialisbtabs.monster/]generic tadalafil india[/url] [url=https://levitra.fun/]canadian levitra online[/url] [url=https://hydroxyzine.xyz/]atarax for hives[/url] [url=https://celexa.site/]celexa cost[/url]
Michaelemult · August 27, 2022 at 11:40 am
[url=http://flomax.life/]purchase flomax online[/url]
KiaCounk · August 27, 2022 at 11:51 am
[url=https://celexa.site/]650 mg citalopram[/url]
BooCounk · August 27, 2022 at 11:56 am
[url=https://valtrex.store/]buy generic valtrex without a prescription[/url]
NickCounk · August 27, 2022 at 12:00 pm
[url=http://furosemide.boutique/]buy generic furosemide[/url]
ElwoodGon · August 27, 2022 at 12:07 pm
[url=http://cipro.sbs/]ciprofloxacin 500 mg with out prescription[/url]
DavisMug · August 27, 2022 at 12:09 pm
[url=http://propranolol.fun/]inderal prescription[/url]
ZakCounk · August 27, 2022 at 12:11 pm
[url=https://cialisbtabs.monster/]where to buy cialis over the counter[/url] [url=https://levitra.fun/]canadian pharmacy generic levitra[/url] [url=https://plavix.fun/]clopidogrel brand[/url] [url=https://fildena.site/]fildena 100 canada[/url] [url=https://baclofen.icu/]baclofen tablets brand name[/url] [url=https://xenical.fun/]xenical orlistat[/url] [url=https://celexa.site/]100 mg celexa[/url]
KimCounk · August 27, 2022 at 12:11 pm
[url=https://viagragtab.monster/]discount generic viagra india[/url]
JudyCounk · August 27, 2022 at 12:12 pm
[url=http://zoloft.hair/]5 mg zoloft 30 pills cost[/url]
RobertFoold · August 27, 2022 at 12:19 pm
[url=https://zoloft.sbs/]buy cheap zoloft[/url]
MiaCounk · August 27, 2022 at 12:24 pm
[url=http://celexa.site/]celexa 40mg tablet[/url]
WimCounk · August 27, 2022 at 12:26 pm
[url=http://acyclovir.email/]acyclovir cream price uk[/url]
MiclTek · August 27, 2022 at 12:36 pm
[url=http://prednisolone.site/]prednisolone price[/url]
ElwoodGon · August 27, 2022 at 12:37 pm
[url=http://prednisone.moscow/]buy cheap prednisone online[/url]
JimCounk · August 27, 2022 at 12:44 pm
[url=https://celexa.xyz/]rx citalopram[/url]
NickCounk · August 27, 2022 at 12:49 pm
[url=http://azithromycin.wtf/]azithromycin cost in india[/url]
DarrylSef · August 27, 2022 at 12:58 pm
[url=http://lopressor.xyz/]lopressor iv[/url] [url=http://onlinepharmacy.moscow/]canadadrugpharmacy[/url] [url=http://viagraltab.monster/]buying viagra nz[/url] [url=http://prednisone.moscow/]buy prednisone online cheap[/url] [url=http://buyzoloft.guru/]zoloft 100mg price in india[/url] [url=http://cialishtabs.monster/]cialis daily best price[/url] [url=http://lexapro.fun/]lexapro price[/url]
DenCounk · August 27, 2022 at 1:04 pm
[url=https://levitra.fun/]buy levitra australia[/url]
NickCounk · August 27, 2022 at 1:06 pm
[url=http://nexium.fun/]prescription nexium tablets[/url]
MichaelDwego · August 27, 2022 at 1:14 pm
[url=https://augmentin.fun/]augmentin 250 5 mg[/url]
JaneCounk · August 27, 2022 at 1:43 pm
[url=http://colchicine.fun/]colchicine price south africa[/url]
CarlCounk · August 27, 2022 at 1:45 pm
[url=http://plavix.fun/]clopidogrel 75 mg pill[/url]
TommyHepsy · August 27, 2022 at 1:53 pm
[url=https://finasteride.fun/]propecia cost canada[/url]
IvyCounk · August 27, 2022 at 2:00 pm
[url=http://hydroxyzine.xyz/]atarax for ic[/url] [url=http://nexium.digital/]cheap nexium[/url] [url=http://triamterene.xyz/]triamterene cost[/url]
YonCounk · August 27, 2022 at 2:00 pm
[url=https://colchicine.fun/]can you buy colchicine over the counter uk[/url]
MarvinZem · August 27, 2022 at 2:03 pm
[url=https://doxycycline.sbs/]doxycycline where to get[/url]
TeoCounk · August 27, 2022 at 2:09 pm
[url=https://strattera.icu/]strattera 40mg discount[/url]
KimCounk · August 27, 2022 at 2:17 pm
[url=https://furosemide.site/]lasix 20 mg tabs[/url]
Davidhup · August 27, 2022 at 2:19 pm
[url=https://gabapentin.sbs/]gabapentin online prescription[/url]
IvyCounk · August 27, 2022 at 2:23 pm
[url=http://viagraztab.quest/]price viagra 100mg[/url] [url=http://levitra.fun/]levitra otc[/url] [url=http://metformin.trade/]where can i buy metformin over the counter uk[/url] [url=http://budesonide.xyz/]budesonide online[/url] [url=http://triamterene.xyz/]triamterene 37.5mg hctz 25mg[/url] [url=http://colchicine.fun/]can you buy colchicine over the counter in australia[/url] [url=http://albuterol.wtf/]albuterol asthma[/url]
AmyCounk · August 27, 2022 at 2:26 pm
[url=http://onlinepharmacy.ink/]indianpharmacy com[/url]
WilliamWem · August 27, 2022 at 2:31 pm
[url=https://malegra.life/]buy malegra[/url] [url=https://cialisltab.quest/]cialis 20 mg discount[/url] [url=https://gabapentin.sbs/]neurontin gel[/url] [url=https://zoloft.sbs/]buy zoloft online no prescription[/url] [url=https://sildenafil.moscow/]mexico pharmacy viagra[/url]
JoeCounk · August 27, 2022 at 2:34 pm
[url=https://budesonide.xyz/]budesonide 500 mcg[/url] [url=https://furosemide.boutique/]lasix 40[/url] [url=https://valacyclovir.xyz/]valtrex rx where to buy[/url] [url=https://amitriptyline.fun/]elavil 25[/url] [url=https://zanaflex.live/]tizanidine order online[/url] [url=https://viagragtab.monster/]prescription viagra[/url]
PaulCounk · August 27, 2022 at 2:38 pm
[url=https://erythromycin.fun/]erythromycin in usa[/url]
SamCounk · August 27, 2022 at 2:38 pm
[url=http://viagraztab.quest/]viagra compare prices[/url] [url=http://celexa.xyz/]celexa canada[/url] [url=http://malegra.xyz/]malegra 50[/url] [url=http://onlinepharmacy.ink/]safe online pharmacies in canada[/url]
MaryCounk · August 27, 2022 at 2:45 pm
[url=https://hydroxyzine.xyz/]atarax 50 mg cost[/url] [url=https://zanaflex.run/]12 mg tizanidine[/url] [url=https://albuterol.wtf/]albuterol tablets 4mg[/url]
JudyCounk · August 27, 2022 at 2:52 pm
[url=http://ciprofloxacin.cfd/]where to buy cipro[/url]
MichaelGuabe · August 27, 2022 at 2:56 pm
[url=https://doxycycline.sbs/]doxycycline prescription cost[/url]
SueCounk · August 27, 2022 at 2:58 pm
[url=http://metformin.trade/]can you buy metformin over the counter in australia[/url]
MarkCounk · August 27, 2022 at 3:03 pm
[url=https://silagra.life/]buy silagra uk[/url]
TeoCounk · August 27, 2022 at 3:06 pm
[url=https://fildena.site/]fildena 100 for sale[/url]
Davidhup · August 27, 2022 at 3:12 pm
[url=https://retinoa.fun/]retino 0.25 cream[/url]
Davidhup · August 27, 2022 at 3:14 pm
[url=https://clomid.moscow/]where can i buy real clomid online[/url]
Samuelraisk · August 27, 2022 at 3:25 pm
[url=http://sildenafil.moscow/]cheap viagra canadian pharmacy[/url]
CarlCounk · August 27, 2022 at 3:28 pm
[url=http://furosemide.site/]furosemide 40mg tab[/url]
AshCounk · August 27, 2022 at 4:11 pm
[url=https://vpxl.online/]buy vpxl online[/url] [url=https://tizanidine.cfd/]tizanidine 10mg cost[/url]
PaulCounk · August 27, 2022 at 4:17 pm
[url=https://valacyclovir.xyz/]buy valtrex singapore[/url]
WimCounk · August 27, 2022 at 4:31 pm
[url=http://allopurinol.golf/]buy allopurinol 300 mg uk[/url]
TeoCounk · August 27, 2022 at 4:45 pm
[url=https://zanaflex.run/]zanaflex 2mg tablets[/url]
LisaCounk · August 27, 2022 at 4:49 pm
[url=https://viagraztab.quest/]sildenafil medicine in india[/url]
Michaeldrist · August 27, 2022 at 4:51 pm
[url=http://malegra.life/]malegra dxt without prescription[/url]
Edgarlor · August 27, 2022 at 4:54 pm
[url=http://propecia.autos/]buy propecia 1mg uk[/url]
RichardFaply · August 27, 2022 at 5:00 pm
[url=http://synthroid.business/]buy synthroid[/url] [url=http://cytotec.best/]cytotec cost singapore[/url] [url=http://isotretinoin.life/]accutane 40 mg price[/url] [url=http://propranolol.fun/]buy propranolol 80 mg[/url] [url=http://finpecia.life/]order propecia online[/url] [url=http://onlinepharmacy.moscow/]best mail order pharmacy canada[/url] [url=http://vardenafil.ink/]levitra tablets[/url]
SueCounk · August 27, 2022 at 5:07 pm
[url=http://zoloft.durban/]buy zoloft online cheap[/url]
JasonCounk · August 27, 2022 at 5:18 pm
[url=https://onlinedrugstore.run/]online pharmacy china[/url]
Samuelraisk · August 27, 2022 at 5:23 pm
[url=http://baclofen.site/]baclofen coupon[/url]
MarvinZem · August 27, 2022 at 5:24 pm
[url=https://prednisolone.site/]prednisolone 5 mg tablet[/url]
SueCounk · August 27, 2022 at 5:32 pm
[url=http://hydroxyzine.xyz/]atarax cream price[/url]
EvaCounk · August 27, 2022 at 5:50 pm
[url=http://metformin.trade/]metformin buy canada[/url]
WilliamWem · August 27, 2022 at 5:50 pm
[url=https://flomax.life/]flomax 500 mg[/url] [url=https://synthroid.business/]synthroid 60 mcg[/url] [url=https://methocarbamol.xyz/]where can i buy robaxin[/url]
RodneyTab · August 27, 2022 at 6:05 pm
[url=http://lopressor.xyz/]order lopressor[/url]
PaulCounk · August 27, 2022 at 6:11 pm
[url=https://baclofen.icu/]medication baclofen 10 mg[/url]
MichaelGuabe · August 27, 2022 at 6:23 pm
[url=https://valtrex.run/]can you buy valtrex over the counter in uk[/url]
AmyCounk · August 27, 2022 at 6:52 pm
[url=http://zanaflex.run/]tizanidine for sale[/url]
ElwoodGon · August 27, 2022 at 7:05 pm
[url=http://prozac.moscow/]prozac buy canada[/url]
MiclTek · August 27, 2022 at 7:11 pm
[url=http://finpecia.life/]buy propecia hair loss[/url]
MaryCounk · August 27, 2022 at 7:21 pm
[url=https://zoloft.durban/]1000mg zoloft[/url] [url=https://ciprofloxacin.cfd/]cipro over the counter in mexico[/url] [url=https://viagraztab.quest/]order viagra in india[/url] [url=https://retinoa.site/]retino 0.05 gel[/url]
MarkCounk · August 27, 2022 at 7:26 pm
[url=https://fildena.site/]fildena 50[/url]
ElwoodGon · August 27, 2022 at 7:34 pm
[url=http://prozac.moscow/]buy fluoxetine online 40mg[/url]
NickCounk · August 27, 2022 at 7:35 pm
[url=http://cialisetab.quest/]can you buy cialis over the counter uk[/url]
MarkCounk · August 27, 2022 at 7:49 pm
[url=https://trazodone.click/]buy desyrel[/url]
Curtisvibia · August 27, 2022 at 7:58 pm
[url=https://isotretinoin.life/]pharmacy accutane[/url]
SueCounk · August 27, 2022 at 8:05 pm
[url=http://onlinepharmacy.ink/]canadian pharmacy world[/url]
JasonCounk · August 27, 2022 at 8:09 pm
[url=https://toradol.fun/]toradol over the counter[/url]
JudyCounk · August 27, 2022 at 8:21 pm
[url=http://hydroxyzine.xyz/]atarax 50 mg[/url]
AmyCounk · August 27, 2022 at 8:23 pm
[url=http://erythromycin.fun/]buy erythromycin cream[/url]
WimCounk · August 27, 2022 at 8:31 pm
[url=http://prednisolone.run/]buy prednisolone 5mg tabs[/url]
JudyCounk · August 27, 2022 at 8:33 pm
[url=http://zanaflex.live/]zanaflex 4mg tablet price[/url]
MichaelGuabe · August 27, 2022 at 8:36 pm
[url=https://cytotec.best/]cytotec tablets uk[/url]
MarkCounk · August 27, 2022 at 8:38 pm
[url=https://furosemide.site/]furosemide best price[/url]
DavisMug · August 27, 2022 at 8:44 pm
[url=http://propecia.autos/]finasteride how to get[/url]
DavisMug · August 27, 2022 at 8:45 pm
[url=http://mebendazole.fun/]how to get vermox[/url]
NickCounk · August 27, 2022 at 8:48 pm
[url=http://viagrattab.quest/]can you buy over the counter viagra[/url]
MiaCounk · August 27, 2022 at 8:53 pm
[url=http://retinoa.site/]retino 0.25 cream[/url]
SamCounk · August 27, 2022 at 8:56 pm
[url=http://azithromycin.wtf/]how to buy zithromax online[/url] [url=http://zoloft.hair/]online pharmacy zoloft[/url] [url=http://viagragtab.monster/]buy brand viagra online canada[/url] [url=http://zestoretic.xyz/]zestoretic tabs[/url] [url=http://metformin.trade/]glucophage 1200 mg[/url] [url=http://viagraztab.quest/]buy female viagra online[/url] [url=http://plavix.fun/]plavix medicine price in india[/url]
JosephMaict · August 27, 2022 at 9:07 pm
[url=https://diclofenac.life/]diclofenac sod ec 75[/url] [url=https://wellbutrin.site/]zyban price[/url]
ElwoodGon · August 27, 2022 at 9:08 pm
[url=http://retinoa.fun/]retino[/url]
JaneCounk · August 27, 2022 at 9:18 pm
[url=http://amitriptyline.fun/]amitriptylin online[/url]
PaulCounk · August 27, 2022 at 9:28 pm
[url=https://baclofen.icu/]baclofen tab 20mg[/url]
Charlesaduse · August 27, 2022 at 9:35 pm
[url=https://viagraltab.monster/]best online price for viagra[/url]
Estebanguall · August 27, 2022 at 9:35 pm
[url=http://budesonide.sbs/]budesonide 3 mg cap[/url]
Curtisvibia · August 27, 2022 at 9:41 pm
[url=https://synthroid.fun/]synthroid 0.05 mg daily[/url]
Estebanguall · August 27, 2022 at 9:51 pm
[url=http://proscar.fun/]generic propecia mexico[/url]
SueCounk · August 27, 2022 at 10:10 pm
[url=http://malegra.xyz/]malegra fxt[/url]
TedCounk · August 27, 2022 at 10:18 pm
[url=https://viagrattab.quest/]viagra gel uk[/url]
MaryCounk · August 27, 2022 at 10:18 pm
[url=https://triamterene.xyz/]triamterene 50 mg[/url] [url=https://ivermectin.tattoo/]stromectol 3 mg price[/url] [url=https://valacyclovir.xyz/]valtrex cheapest price[/url] [url=https://ciprofloxacin.cfd/]ciprofloxacin over the counter usa[/url] [url=https://albuterol.wtf/]where to buy albuterol[/url]
RichardFaply · August 27, 2022 at 10:30 pm
[url=http://modafinil.hair/]where can you buy modafinil[/url] [url=http://malegra.life/]malegra dxt[/url] [url=http://accutane.pics/]accutane how to get[/url] [url=http://propecia.autos/]propecia generic brand[/url] [url=http://erectafil.cfd/]erectafil 5mg[/url] [url=http://tadacip.works/]tadacip for sale uk[/url] [url=http://flomax.life/]flomax pill[/url]
MichaelGuabe · August 27, 2022 at 10:37 pm
[url=https://retinoa.fun/]retino cream[/url]
RodneyTab · August 27, 2022 at 10:45 pm
[url=http://lopressor.xyz/]lopressor 5 mg[/url]
Charlesaduse · August 27, 2022 at 10:47 pm
[url=https://synthroid.fun/]buy synthroid 0.0125 online[/url]
Curtisvibia · August 27, 2022 at 10:55 pm
[url=https://budesonide.sbs/]budesonide 3 mg cost[/url]
ElwoodGon · August 27, 2022 at 10:58 pm
[url=http://vardenafil.download/]buy levitra from india[/url]
Jameseloro · August 27, 2022 at 11:04 pm
[url=http://tadacip.works/]tadacip 20 mg online india[/url] [url=http://budesonide.sbs/]budesonide 3 mg tablet[/url] [url=http://cytotec.best/]cytotec medicine price in india[/url] [url=http://lopressor.xyz/]lopressor 15 mg[/url]
TommyHepsy · August 27, 2022 at 11:08 pm
[url=https://isotretinoin.life/]accutane 5 mg 10mg[/url]
Estebanguall · August 27, 2022 at 11:20 pm
[url=http://prednisone.moscow/]prednisone without a script[/url]
ZakCounk · August 27, 2022 at 11:28 pm
[url=https://accutane.business/]accutane in mexico[/url] [url=https://malegra.xyz/]malegra[/url] [url=https://hydroxyzine.xyz/]buy atarax online uk[/url] [url=https://albuterol.wtf/]cheap ventolin[/url] [url=https://nexium.fun/]nexium prescription[/url] [url=https://modafinil.pics/]where to order modafinil[/url] [url=https://celexa.site/]5mg celexa[/url] [url=https://zestoretic.xyz/]zestoretic price[/url]
MiaCounk · August 27, 2022 at 11:32 pm
[url=http://amitriptyline.site/]amitriptyline buy online australia[/url]
Curtisvibia · August 27, 2022 at 11:40 pm
[url=https://wellbutrin.site/]cost for wellbutrin[/url]
JosephMaict · August 27, 2022 at 11:42 pm
[url=https://isotretinoin.life/]how to buy accutane[/url] [url=https://accutane.pics/]where can i get accutane online[/url] [url=https://zoloft.sbs/]6.25 mg zoloft[/url]
ElwoodGon · August 27, 2022 at 11:51 pm
[url=http://provigil.cfd/]can you buy modafinil over the counter uk[/url]
AmyCounk · August 27, 2022 at 11:56 pm
[url=http://trental.fun/]buy trental 400mg[/url]
IvyCounk · August 28, 2022 at 12:18 am
[url=http://albuterol.wtf/]albuterol online australia[/url] [url=http://cialisetab.quest/]buy cialis 5mg[/url] [url=http://levitra.fun/]levitra pills[/url] [url=http://malegra.xyz/]malegra 200 mg[/url] [url=http://onlinepharmacy.ink/]ez pharmacy[/url] [url=http://viagrattab.quest/]generic viagra from canada[/url] [url=http://accutane.business/]accutane sale uk[/url]
WilliamWem · August 28, 2022 at 12:30 am
[url=https://propecia.lol/]generic propecia online usa[/url] [url=https://isotretinoin.life/]buy 40mg accutane online[/url] [url=https://flomax.life/]flomax for sale[/url] [url=https://vardenafil.ink/]brand name levitra cost[/url] [url=https://cialishtabs.monster/]generic cialis nz[/url] [url=https://modafinil.hair/]modafinil australia[/url] [url=https://tadacip.works/]where to buy tadacip online[/url]
KiaCounk · August 28, 2022 at 12:36 am
[url=https://bactrim.xyz/]bactrim 40 mg[/url]
AshCounk · August 28, 2022 at 12:38 am
[url=https://retinatretinoincream.com/]generic retin-a micro[/url] [url=https://tamoxifen.digital/]buy nolvadex online uk[/url] [url=https://indocinindomethacin.quest/]indocin coupon[/url] [url=https://modafinil.solutions/]buy modafinil us[/url] [url=https://ampicillin.cyou/]ampicillin tablet 500mg[/url] [url=https://ventolin.boutique/]ventolin uk pharmacy[/url] [url=https://synthroid.sale/]synthroid 50mg[/url] [url=https://proscar.digital/]propecia 1.25 mg[/url]
JimCounk · August 28, 2022 at 12:40 am
[url=https://zoloft.hair/]zoloft 10[/url]
Curtisvibia · August 28, 2022 at 12:47 am
[url=https://anafranil.fun/]anafranil uk[/url]
WimCounk · August 28, 2022 at 1:06 am
[url=http://paxil.guru/]paxil in europe[/url]
RobertFoold · August 28, 2022 at 1:16 am
[url=https://lipitor.fun/]lipitor generic on line no prescription[/url]
KimCounk · August 28, 2022 at 1:23 am
[url=https://trental.fun/]medicine trental 400 mg[/url]
YonCounk · August 28, 2022 at 1:41 am
[url=https://celexa.site/]celexa 1101[/url]
WilliamWem · August 28, 2022 at 1:46 am
[url=https://prednisone.moscow/]online prednisone 5mg[/url] [url=https://flomax.life/]flomax price australia[/url]
MarkCounk · August 28, 2022 at 1:48 am
[url=https://zoloft.durban/]zoloft generic 100mg[/url]
JosephMaict · August 28, 2022 at 1:48 am
[url=https://viagraltab.monster/]sildenafil generic for sale[/url] [url=https://cialisltab.quest/]generic cialis for sale online[/url] [url=https://valtrex.run/]cheap valtrex online[/url] [url=https://vardenafil.download/]vardenafil 20mg price[/url] [url=https://doxycycline.sbs/]doxycycline buy canada 100mg[/url] [url=https://cytotec.best/]can i buy cytotec over the counter[/url] [url=https://mebendazole.fun/]where can i buy vermox online[/url] [url=https://gabapentin.sbs/]cheap gabapentin[/url]
AshCounk · August 28, 2022 at 1:49 am
[url=https://buyfinasteride.store/]propecia tablets online india[/url] [url=https://buycipro.store/]online cipro[/url]
JimCounk · August 28, 2022 at 2:03 am
[url=https://nexium.digital/]nexium 6.00 coupon[/url]
RodneyTab · August 28, 2022 at 2:12 am
[url=http://diclofenac.life/]voltaren cream over the counter[/url]
MiaCounk · August 28, 2022 at 2:13 am
[url=http://onlinepharmacy.ink/]best mail order pharmacy canada[/url]
BooCounk · August 28, 2022 at 2:17 am
[url=https://motilium.cfd/]motilium generic brand[/url]
Charlesaduse · August 28, 2022 at 2:20 am
[url=https://provigil.cfd/]modafinil 100mg price in india[/url]
KimCounk · August 28, 2022 at 2:30 am
[url=https://zanaflex.run/]prescription zanaflex price[/url]
Jameseloro · August 28, 2022 at 2:34 am
[url=http://cytotec.best/]misoprostol where to buy[/url] [url=http://cialishtabs.monster/]tadalafil 5mg tablets[/url] [url=http://tadacip.works/]tadacip india price[/url] [url=http://gabapentin.sbs/]gabapentin tablets[/url] [url=http://provigil.cfd/]provigil buy online canada[/url] [url=http://wellbutrin.site/]wellbutrin how to get[/url] [url=http://cipro.sbs/]where can i buy ciprofloxacin[/url] [url=http://anafranil.fun/]anafranil price[/url]
Curtisvibia · August 28, 2022 at 2:39 am
[url=https://flomax.life/]where can i buy generic flomax[/url]
JosephMaict · August 28, 2022 at 2:41 am
[url=https://methocarbamol.xyz/]robaxin pills[/url] [url=https://buspar.life/]5 mg buspar[/url] [url=https://vardenafil.download/]levitra prices in mexico[/url] [url=https://proscar.fun/]cheap generic propecia[/url] [url=https://propecia.autos/]where can i get finasteride[/url] [url=https://cialisltab.quest/]tadalafil cost in mexico[/url] [url=https://prednisolone.site/]prednisolone tablet cost[/url] [url=https://buyzoloft.guru/]buy zoloft online uk[/url]
DenCounk · August 28, 2022 at 2:43 am
[url=https://trental.fun/]trental 400 price[/url]
MiclTek · August 28, 2022 at 2:45 am
[url=http://propecia.lol/]propecia canada[/url]
MiaCounk · August 28, 2022 at 2:51 am
[url=http://zanaflex.run/]buy zanaflex online with no prescription[/url]
WilliamWem · August 28, 2022 at 2:52 am
[url=https://celebrex.life/]celebrex medicine[/url] [url=https://lopressor.xyz/]order lopressor[/url] [url=https://doxycycline.sbs/]buy doxycycline over the counter[/url]
RicIsose · August 28, 2022 at 2:59 am
[url=https://atomoxetine.fun/]strattera cost[/url] [url=https://augmentin.fun/]augmentin brand[/url] [url=https://prednisolone.site/]cheap prednisolne[/url] [url=https://lipitor.fun/]lipitor 5 mg[/url]
LisaCounk · August 28, 2022 at 3:04 am
[url=https://albuterol.wtf/]albuterol otc canada[/url]
RodneyTab · August 28, 2022 at 3:05 am
[url=http://malegra.life/]malegra fxt[/url]
BooCounk · August 28, 2022 at 3:37 am
[url=https://citalopram.cfd/]citalopram 20mg online[/url]
Michaelemult · August 28, 2022 at 3:39 am
[url=http://prozac.moscow/]fluoxetine 20 mg uk[/url]
JackCounk · August 28, 2022 at 3:40 am
[url=https://furosemide.site/]lasix over the counter australia[/url]
IvyCounk · August 28, 2022 at 3:54 am
[url=http://celexa.xyz/]citalopram 4741[/url] [url=http://onlinepharmacy.ink/]indian pharmacy paypal[/url] [url=http://viagrattab.quest/]cheap real viagra[/url]
TedCounk · August 28, 2022 at 4:01 am
[url=https://silagra.life/]silagra online uk[/url]
Samuelraisk · August 28, 2022 at 4:05 am
[url=http://synthroid.wtf/]brand synthroid coupon[/url]
WilliamWem · August 28, 2022 at 4:10 am
[url=https://viagraltab.monster/]viagra tablet cost in india[/url] [url=https://finasteride.fun/]where to buy generic propecia uk[/url] [url=https://erectafil.cfd/]erectafil 5mg[/url] [url=https://buyzoloft.guru/]brand zoloft[/url] [url=https://anafranil.fun/]clomipramine anafranil[/url] [url=https://lopressor.xyz/]lopressor 100 mg price[/url]
JudyCounk · August 28, 2022 at 4:29 am
[url=http://zestoretic.xyz/]zestoretic medication[/url]
TimothyThive · August 28, 2022 at 4:36 am
[url=https://buspar.life/]buspar 15 mg[/url]
TommyHepsy · August 28, 2022 at 4:55 am
[url=https://lexapro.fun/]cheapest price for lexapro[/url]
NickCounk · August 28, 2022 at 5:00 am
[url=http://metformin.trade/]buy metformin from india[/url]
TeoCounk · August 28, 2022 at 5:23 am
[url=https://furosemide.boutique/]buy furosemide 5mg online[/url]
DenCounk · August 28, 2022 at 5:37 am
[url=https://erythromycin.fun/]erythromycin 80mg[/url]
LisaCounk · August 28, 2022 at 5:47 am
[url=https://trental.fun/]buy trental uk[/url]
Charlesaduse · August 28, 2022 at 6:01 am
[url=https://zoloft.sbs/]5 mg zoloft 30 pills[/url]
MaryCounk · August 28, 2022 at 6:04 am
[url=https://viagraztab.quest/]viagra cheap fast delivery[/url] [url=https://baclofen.icu/]baclofen gel[/url] [url=https://cialisbtabs.monster/]cialis daily use 5 mg[/url] [url=https://zanaflex.run/]zanaflex online[/url] [url=https://levitra.fun/]lavitra10mg[/url]
LisaCounk · August 28, 2022 at 6:08 am
[url=https://metformin.trade/]how can i get metformin[/url]
JaneCounk · August 28, 2022 at 6:21 am
[url=http://retinoa.site/]retino gel[/url]
SueCounk · August 28, 2022 at 6:22 am
[url=http://colchicine.fun/]colchicine 0.6 mg online[/url]
DarrylSef · August 28, 2022 at 6:24 am
[url=http://viagraltab.monster/]viagra 100mg pills[/url] [url=http://augmentin.fun/]augmentin price comparison[/url] [url=http://propecia.lol/]propecia otc[/url] [url=http://baclofen.site/]baclofen pills 025 mg[/url] [url=http://finpecia.life/]5mg propecia for sale[/url] [url=http://mebendazole.fun/]vermox us[/url] [url=http://vardenafil.download/]levitra usa[/url] [url=http://onlinepharmacy.moscow/]www pharmacyonline[/url]
CarlCounk · August 28, 2022 at 6:41 am
[url=http://zestoretic.xyz/]zestoretic[/url]
TimothyThive · August 28, 2022 at 6:42 am
[url=https://onlinepharmacy.moscow/]legit mexican pharmacy[/url]
AshCounk · August 28, 2022 at 6:46 am
[url=https://anafranil.today/]anafranil 25 mg[/url] [url=https://celebrex.today/]where can i buy generic celebrex[/url] [url=https://fluoxetine.boutique/]fluoxetine 80 mg daily[/url] [url=https://tadalafilum.com/]where to buy tadalafil online[/url] [url=https://lipitoratorvastatin.quest/]lipitor prescription[/url] [url=https://trental.monster/]trental price[/url] [url=https://prazosin.shop/]prazosin pill[/url] [url=https://gabapentin.digital/]neurontin 300 mg cap[/url]
Charlesaduse · August 28, 2022 at 7:02 am
[url=https://doxycycline.sbs/]doxycycline 100g tablets[/url]
RodneyTab · August 28, 2022 at 7:12 am
[url=http://isotretinoin.life/]buy accutane online paypal[/url]
IvyCounk · August 28, 2022 at 7:14 am
[url=http://amitriptyline.site/]how to buy amitriptyline[/url] [url=http://baclofen.icu/]baclofen price 10mg in usa[/url] [url=http://viagragtab.monster/]female viagra[/url] [url=http://modafinil.pics/]buy modafinil online india[/url] [url=http://strattera.icu/]cost of strattera 25 mg[/url] [url=http://trazodone.click/]buy trazodone not generic without a prescription[/url] [url=http://cialisetab.quest/]how to get real cialis online[/url]
MichaelGuabe · August 28, 2022 at 7:45 am
[url=https://anafranil.fun/]anafranil 25g[/url]
ZakCounk · August 28, 2022 at 8:01 am
[url=https://zoloft.hair/]zoloft online pharmacy[/url] [url=https://hydroxyzine.xyz/]atarax prescription uk[/url] [url=https://xenical.fun/]orlistat 60 mg pills[/url] [url=https://viagraztab.quest/]cheap viagra 25[/url] [url=https://celexa.xyz/]citalopram for anxiety[/url]
JaneCounk · August 28, 2022 at 8:15 am
[url=http://toradol.fun/]toradol 20 mg[/url]
EvaCounk · August 28, 2022 at 8:31 am
[url=http://cialisbtabs.monster/]generic tadalafil price[/url]
RobertFoold · August 28, 2022 at 8:32 am
[url=https://diclofenac.life/]diclofenac 250mg[/url]
JoeCounk · August 28, 2022 at 8:32 am
[url=https://budesonide.xyz/]budecort 400[/url] [url=https://baclofen.icu/]baclofen 20 mg online[/url] [url=https://zestoretic.xyz/]zestoretic 20-25 mg[/url]
WimCounk · August 28, 2022 at 8:36 am
[url=http://buyproscar.store/]proscar generic price[/url]
MaryCounk · August 28, 2022 at 8:37 am
[url=https://valacyclovir.xyz/]where to buy valtrex over the counter[/url] [url=https://bactrim.xyz/]buy bactrim antibiotic[/url] [url=https://toradol.fun/]toradol for dogs[/url]
ZakCounk · August 28, 2022 at 8:43 am
[url=https://zestoretic.xyz/]zestoretic 20-25 mg[/url] [url=https://furosemide.boutique/]furosemide 400 mg tablets[/url] [url=https://erythromycin.fun/]erythromycin pill price[/url]
AnnaCounk · August 28, 2022 at 9:02 am
[url=http://zanaflex.run/]tizanidine 4 mg[/url]
Davidhup · August 28, 2022 at 9:05 am
[url=https://zoloft.sbs/]zoloft 650[/url]
DavisMug · August 28, 2022 at 9:14 am
[url=http://prednisone.moscow/]order prednisone online no prescription[/url]
Michaeldrist · August 28, 2022 at 9:19 am
[url=http://valtrex.run/]how much is valtrex in canada[/url]
EyeCounk · August 28, 2022 at 9:39 am
[url=https://retinoa.site/]retino[/url] [url=https://zanaflex.run/]tizanidine brand name india[/url] [url=https://amitriptyline.site/]endep cheap[/url] [url=https://triamterene.xyz/]triamterene hctz 37.5 25 mg tb[/url] [url=https://trazodone.click/]trazodone 700 mg[/url]
RichardFaply · August 28, 2022 at 9:43 am
[url=http://propecia.autos/]propecia canadian pharmacy[/url] [url=http://proscar.fun/]order propecia online no prescription[/url]
AnnaCounk · August 28, 2022 at 9:53 am
[url=http://plavix.fun/]clopidogrel medicine[/url]
EyeCounk · August 28, 2022 at 10:00 am
[url=https://retinoa.site/]retino 05 cream[/url] [url=https://trazodone.click/]buy trazodone australia[/url]
YonCounk · August 28, 2022 at 10:05 am
[url=https://zoloft.hair/]buy zoloft online australia[/url]
NickCounk · August 28, 2022 at 10:08 am
[url=http://silagra.life/]buy silagra[/url]
EyeCounk · August 28, 2022 at 10:28 am
[url=https://furosemide.site/]over the counter lasix[/url] [url=https://baclofen.icu/]can you buy baclofen over the counter uk[/url] [url=https://colchicine.fun/]colchicine 0.6 mg tab[/url] [url=https://celexa.xyz/]celexa 60 mg[/url] [url=https://cialisetab.quest/]order cialis online no prescription[/url] [url=https://trimox.site/]augmentin 625mg tablets[/url] [url=https://amitriptyline.fun/]buy cheap amitriptyline[/url] [url=https://levitra.fun/]purchase levitra canada[/url]
SueCounk · August 28, 2022 at 10:39 am
[url=http://celexa.xyz/]citalopram 200 mg[/url]
Samuelraisk · August 28, 2022 at 10:49 am
[url=http://prozac.moscow/]fluoxetine 20 mg uk[/url]
MaryCounk · August 28, 2022 at 11:01 am
[url=https://cialisetab.quest/]tadalafil from india[/url] [url=https://zanaflex.live/]zanaflex uk[/url] [url=https://amitriptyline.fun/]buy generic amitriptyline[/url] [url=https://baclofen.icu/]buy lioresal[/url] [url=https://bactrim.xyz/]bactrim canadian pharmacy[/url] [url=https://malegra.xyz/]generic malegra[/url] [url=https://erythromycin.fun/]buy erythromycin tablets online[/url]
ZakCounk · August 28, 2022 at 11:05 am
[url=https://trental.fun/]order trental[/url] [url=https://zoloft.durban/]how much is zoloft[/url] [url=https://accutane.business/]accutane mexico[/url] [url=https://fildena.site/]fildena 100mg[/url] [url=https://trazodone.click/]trazodone purchase online[/url] [url=https://amitriptyline.fun/]elavil 50 mg[/url]
CarlCounk · August 28, 2022 at 11:09 am
[url=http://zoloft.hair/]zoloft cost generic[/url]
IvyCounk · August 28, 2022 at 11:12 am
[url=http://celexa.site/]citalopram prescription[/url] [url=http://xenical.fun/]where to buy xenical in usa[/url] [url=http://ivermectin.tattoo/]ivermectin usa[/url]
JasonCounk · August 28, 2022 at 11:13 am
[url=https://celexa.xyz/]celexa price in india[/url]
RicIsose · August 28, 2022 at 11:17 am
[url=https://wellbutrin.site/]bupropion 100 mg coupon[/url] [url=https://accutane.pics/]where to buy accutane[/url] [url=https://lopressor.xyz/]lopressor 2.5 mg[/url] [url=https://erectafil.cfd/]erectafil canada[/url] [url=https://anafranil.fun/]anafranil for anxiety[/url] [url=https://cytotec.best/]cytotec online without prescription[/url] [url=https://tadacip.works/]tadacip 100[/url]
AnnaCounk · August 28, 2022 at 11:19 am
[url=http://ivermectin.tattoo/]ivermectin 50 mg[/url]
Samuelraisk · August 28, 2022 at 11:26 am
[url=http://valtrex.run/]buy generic valtrex[/url]
AlanCounk · August 28, 2022 at 11:27 am
[url=http://viagrattab.quest/]best female viagra tablets in india[/url] [url=http://accutane.business/]accutane in mexico[/url] [url=http://trazodone.click/]trazodone generic cost[/url] [url=http://cialisbtabs.monster/]generic cialis online australia[/url] [url=http://retinoa.site/]retino 05[/url] [url=http://levitra.fun/]where to purchase levitra[/url]
TommyHepsy · August 28, 2022 at 11:27 am
[url=https://diclofenac.life/]2003 diclofenac[/url]
JosephMaict · August 28, 2022 at 11:28 am
[url=https://gabapentin.sbs/]neurontin 2400 mg[/url] [url=https://propranolol.fun/]propranolol 10 mg where to buy[/url] [url=https://prozac.moscow/]fluoxetine prescription cost[/url] [url=https://synthroid.business/]synthroid 5mcg[/url] [url=https://valtrex.run/]valtrex generic in mexico[/url] [url=https://accutane.pics/]generic accutane cost[/url]
Edgarlor · August 28, 2022 at 11:30 am
[url=http://cipro.sbs/]buying cipro online[/url]
Samuelraisk · August 28, 2022 at 11:47 am
[url=http://valtrex.run/]valtrex 1000 mg for sale[/url]
IvyCounk · August 28, 2022 at 11:50 am
[url=http://amitriptyline.site/]amitriptyline 50 mg tabs[/url] [url=http://malegra.xyz/]malegra 120 mg[/url] [url=http://levitra.fun/]vardenafil 10 mg coupon[/url] [url=http://azithromycin.wtf/]azithromycin 1000 mg cost[/url] [url=http://zanaflex.run/]how much is tizanidine 4mg[/url] [url=http://furosemide.boutique/]lasix 20 mg tablet price[/url] [url=http://toradol.fun/]toradol generic brand name[/url] [url=http://hydroxyzine.xyz/]generic for atarax[/url]
Curtisvibia · August 28, 2022 at 12:02 pm
[url=https://anafranil.fun/]anafranil canada[/url]
Davidhup · August 28, 2022 at 12:07 pm
[url=https://valtrex.run/]valtrex uk[/url]
Curtisvibia · August 28, 2022 at 12:20 pm
[url=https://malegra.life/]malegra 120mg[/url]
NickCounk · August 28, 2022 at 12:25 pm
[url=http://amitriptyline.site/]elavil for migraines[/url]
DavisMug · August 28, 2022 at 12:25 pm
[url=http://malegra.life/]malegra 200 mg price[/url]
KiaCounk · August 28, 2022 at 12:26 pm
[url=https://modafinil.pics/]modafinil otc[/url]
MaryCounk · August 28, 2022 at 12:40 pm
[url=https://silagra.life/]buy silagra[/url] [url=https://retinoa.site/]retino 0.25[/url]
RichardFaply · August 28, 2022 at 12:45 pm
[url=http://cytotec.best/]cytotec tablets australia[/url] [url=http://proscar.fun/]propecia prescription cost[/url]
MiaCounk · August 28, 2022 at 12:51 pm
[url=http://onlinepharmacy.ink/]online pharmacy india[/url]
Edgarlor · August 28, 2022 at 12:52 pm
[url=http://cytotec.best/]misoprostol 400 mg[/url]
JaneCounk · August 28, 2022 at 12:52 pm
[url=http://zanaflex.run/]zanaflex 48 mg[/url]
WimCounk · August 28, 2022 at 12:52 pm
[url=http://strattera.sale/]purchase stattera[/url]
Samuelraisk · August 28, 2022 at 12:57 pm
[url=http://proscar.fun/]propecia price singapore[/url]
AnnaCounk · August 28, 2022 at 1:12 pm
[url=http://retinoa.site/]retino a[/url]
JasonCounk · August 28, 2022 at 1:24 pm
[url=https://lyrica.run/]where to buy lyrica[/url]
Edgarlor · August 28, 2022 at 1:26 pm
[url=http://propecia.autos/]finpecia 1 mg[/url]
RobertFoold · August 28, 2022 at 1:29 pm
[url=https://methocarbamol.xyz/]where can you get robaxin[/url]
LisaCounk · August 28, 2022 at 1:31 pm
[url=https://colchicine.fun/]colchicine 0.6 mg without prescription[/url]
DavisMug · August 28, 2022 at 1:39 pm
[url=http://cytotec.best/]price of misoprostol tablet[/url]
SueCounk · August 28, 2022 at 1:52 pm
[url=http://nexium.digital/]nexium over the counter best price[/url]
Edgarlor · August 28, 2022 at 2:01 pm
[url=http://prednisolone.site/]buy prendisalone on line uk[/url]
MiclTek · August 28, 2022 at 2:08 pm
[url=http://methocarbamol.xyz/]robaxin 500 mg tablet[/url]
Estebanguall · August 28, 2022 at 2:13 pm
[url=http://malegra.life/]malegra dxt online[/url]
Samuelraisk · August 28, 2022 at 2:16 pm
[url=http://viagraltab.monster/]how to get viagra in mexico[/url]
PaulCounk · August 28, 2022 at 2:16 pm
[url=https://zestoretic.xyz/]prinzide zestoretic[/url]
DarrylSef · August 28, 2022 at 2:22 pm
[url=http://prednisolone.site/]prednisolone cost uk[/url] [url=http://mebendazole.fun/]vermox canada where to buy[/url] [url=http://gabapentin.sbs/]neurontin drug[/url] [url=http://diclofenac.life/]diclofenac 3 cream[/url] [url=http://malegra.life/]malegra 100 cheap[/url] [url=http://baclofen.site/]baclofen 10 mg tablets[/url] [url=http://augmentin.fun/]amoxicillin 20 mg[/url]
LisaCounk · August 28, 2022 at 2:31 pm
[url=https://zestoretic.xyz/]zestoretic 20 12.5[/url]
YonCounk · August 28, 2022 at 2:32 pm
[url=https://strattera.icu/]cost of strattera[/url]
MiclTek · August 28, 2022 at 2:35 pm
[url=http://anafranil.fun/]anafranil depression[/url]
TommyHepsy · August 28, 2022 at 2:38 pm
[url=https://gabapentin.sbs/]neurontin tablets 100mg[/url]
BooCounk · August 28, 2022 at 2:55 pm
[url=https://amitriptylineelavil.quest/]elavil 500 mg[/url]
PaulCounk · August 28, 2022 at 3:02 pm
[url=https://viagragtab.monster/]order cheap viagra[/url]
WimCounk · August 28, 2022 at 3:06 pm
[url=http://buyaccutane.store/]accutane prescription uk[/url]
ElwoodGon · August 28, 2022 at 3:11 pm
[url=http://sildenafil.moscow/]canadian online pharmacy sildenafil[/url]
MichaelGuabe · August 28, 2022 at 3:21 pm
[url=https://finpecia.life/]propecia cost nz[/url]
Michaeldrist · August 28, 2022 at 3:26 pm
[url=http://finpecia.life/]propecia 0.25 mg[/url]
Samuelraisk · August 28, 2022 at 3:26 pm
[url=http://methocarbamol.xyz/]robaxin muscle relaxant[/url]
MaryCounk · August 28, 2022 at 3:29 pm
[url=https://metformin.trade/]buy metformin from mexico[/url] [url=https://colchicine.fun/]where to buy colchicine without a prescription[/url] [url=https://trimox.site/]amoxicillin capsule 500mg price[/url] [url=https://hydroxyzine.xyz/]atarax 50 mg tablet[/url] [url=https://valacyclovir.xyz/]valtrex nz[/url] [url=https://azithromycin.wtf/]where can i buy zithromax[/url] [url=https://zanaflex.live/]tizanidine tab 4mg[/url]
RodneyTab · August 28, 2022 at 3:31 pm
[url=http://propranolol.fun/]inderal 10 mg tablet[/url]
JimCounk · August 28, 2022 at 3:33 pm
[url=https://azithromycin.wtf/]generic azithromycin tablets[/url]
DavisMug · August 28, 2022 at 3:45 pm
[url=http://retinoa.fun/]retino 0.5 cream price[/url]
Estebanguall · August 28, 2022 at 4:01 pm
[url=http://cytotec.best/]cytotec 200mg price[/url]
TeoCounk · August 28, 2022 at 4:01 pm
[url=https://baclofen.icu/]baclofen 10 mg buy online[/url]
SueCounk · August 28, 2022 at 4:04 pm
[url=http://celexa.site/]70 mg citalopram[/url]
JaneCounk · August 28, 2022 at 4:05 pm
[url=http://viagrattab.quest/]viagra for sale from canada[/url]
PaulCounk · August 28, 2022 at 4:09 pm
[url=https://baclofen.icu/]baclofen australia[/url]
Michaelemult · August 28, 2022 at 4:26 pm
[url=http://baclofen.site/]baclofen where to buy[/url]
ElwoodGon · August 28, 2022 at 4:33 pm
[url=http://malegra.life/]malegra 120[/url]
BooCounk · August 28, 2022 at 4:34 pm
[url=https://trimox.today/]amoxicillin 500mg india[/url]
MichaelGuabe · August 28, 2022 at 4:36 pm
[url=https://provigil.cfd/]buy modafinil fast shipping[/url]
TedCounk · August 28, 2022 at 4:37 pm
[url=https://valacyclovir.fun/]valtrex pill[/url]
DarrylSef · August 28, 2022 at 4:39 pm
[url=http://viagraltab.monster/]buy viagra brand online[/url] [url=http://retinoa.fun/]retino 0.05[/url] [url=http://vardenafil.ink/]levitra 5mg cost[/url] [url=http://lexapro.fun/]generic lexapro online pharmacy[/url]
MichaelGuabe · August 28, 2022 at 4:47 pm
[url=https://valtrex.run/]valtrex cheap[/url]
ElwoodGon · August 28, 2022 at 4:53 pm
[url=http://propranolol.fun/]20mg propranolol[/url]
JoeCounk · August 28, 2022 at 4:53 pm
[url=https://silagra.life/]silagra price in india[/url] [url=https://zoloft.hair/]how much is generic zoloft[/url] [url=https://albuterol.wtf/]ventolin price canada[/url] [url=https://nexium.fun/]omeprazole nexium[/url]
TedCounk · August 28, 2022 at 5:06 pm
[url=https://celexa.site/]citalopram nz[/url]
MichaelDwego · August 28, 2022 at 5:16 pm
[url=https://finasteride.fun/]propecia 1mg price[/url]
BooCounk · August 28, 2022 at 5:19 pm
[url=https://cephalexinkeflex.quest/]keflex 1000 mg capsules[/url]
YonCounk · August 28, 2022 at 5:30 pm
[url=https://accutane.business/]accutane gel price[/url]
DavisMug · August 28, 2022 at 5:44 pm
[url=http://malegra.life/]malegra 100 from india[/url]
LisaCounk · August 28, 2022 at 5:45 pm
[url=https://furosemide.site/]buy furesimide[/url]
Jameseloro · August 28, 2022 at 5:59 pm
[url=http://methocarbamol.xyz/]where can i buy robaxin[/url] [url=http://synthroid.wtf/]canada synthroid cost[/url]
IvyCounk · August 28, 2022 at 6:14 pm
[url=http://celexa.site/]citalopram hbr tabs 20mg[/url] [url=http://plavix.fun/]clopidogrel drug[/url] [url=http://metformin.trade/]metformin order canada[/url] [url=http://furosemide.boutique/]furosemide 20[/url]
Jameseloro · August 28, 2022 at 6:20 pm
[url=http://buyzoloft.guru/]5mg zoloft generic pill[/url] [url=http://flomax.life/]flomax medication[/url] [url=http://lipitor.fun/]lipitor 4[/url] [url=http://modafinil.hair/]modafinil tablets online[/url] [url=http://isotretinoin.life/]mexico pharmacy accutane[/url] [url=http://accutane.pics/]cheap accutane 40 mg[/url]
BooCounk · August 28, 2022 at 6:22 pm
[url=https://antabuse.best/]antabuse disulfiram[/url]
KimCounk · August 28, 2022 at 6:27 pm
[url=https://modafinil.pics/]modafinil 2017[/url]
NickCounk · August 28, 2022 at 6:28 pm
[url=http://strattera.icu/]how to order strattera online[/url]
MaryCounk · August 28, 2022 at 6:28 pm
[url=https://zanaflex.run/]tizanidine capsules[/url] [url=https://metformin.trade/]metformin 850 mg price in india[/url] [url=https://azithromycin.wtf/]order azithromycin online canada[/url] [url=https://levitra.fun/]livetra[/url] [url=https://onlinepharmacy.ink/]overseas online pharmacy[/url] [url=https://silagra.life/]silagra 100 mg for sale[/url]
TimothyThive · August 28, 2022 at 6:43 pm
[url=https://tadacip.works/]cheap tadacip[/url]
JosephMaict · August 28, 2022 at 6:50 pm
[url=https://celebrex.life/]celebrex coupon[/url] [url=https://synthroid.business/]synthroid online prescription[/url]
CarlCounk · August 28, 2022 at 6:51 pm
[url=http://colchicine.fun/]colchicine otc[/url]
JackCounk · August 28, 2022 at 6:51 pm
[url=https://azithromycin.wtf/]zithromax canada pharmacy[/url]
ElwoodGon · August 28, 2022 at 7:07 pm
[url=http://retinoa.fun/]retino 0.25 cream[/url]
Edgarlor · August 28, 2022 at 7:14 pm
[url=http://augmentin.fun/]augmentin cost[/url]
Jameseloro · August 28, 2022 at 7:17 pm
[url=http://cialisltab.quest/]cialis 20 mg[/url] [url=http://sildenafil.moscow/]generic viagra canada paypal[/url] [url=http://budesonide.sbs/]budesonide 3 mg cost[/url] [url=http://diclofenac.life/]voltaren tablets australia[/url]
Michaelemult · August 28, 2022 at 7:19 pm
[url=http://retinoa.fun/]retino 05 cream[/url]
DenCounk · August 28, 2022 at 8:02 pm
[url=https://colchicine.fun/]buy cheap colchicine[/url]
MiclTek · August 28, 2022 at 8:03 pm
[url=http://provigil.cfd/]provigil prescription uk[/url]
MiaCounk · August 28, 2022 at 8:06 pm
[url=http://nexium.fun/]nexium 40 mg tablet[/url]
TeoCounk · August 28, 2022 at 8:34 pm
[url=https://triamterene.xyz/]triamterene weight loss[/url]
IvyCounk · August 28, 2022 at 8:37 pm
[url=http://baclofen.icu/]baclofen 20 mg tablet price[/url] [url=http://onlinepharmacy.ink/]buy online pharmacy uk[/url] [url=http://cialisbtabs.monster/]tadalafil 2[/url] [url=http://zestoretic.xyz/]zestoretic 20-25 mg[/url]
RobertFoold · August 28, 2022 at 8:48 pm
[url=https://accutane.pics/]how much is accutane cost[/url]
JackCounk · August 28, 2022 at 9:00 pm
[url=https://onlinedrugstore.run/]no rx pharmacy[/url]
KiaCounk · August 28, 2022 at 9:24 pm
[url=https://amitriptyline.site/]amitriptyline tablets for sale[/url]
EyeCounk · August 28, 2022 at 9:32 pm
[url=https://amitriptyline.site/]elavil depression[/url] [url=https://retinoa.site/]retino[/url] [url=https://strattera.icu/]strattera pills online[/url] [url=https://levitra.fun/]buy levitra 20 mg online[/url] [url=https://erythromycin.fun/]erythromycin online without rx[/url] [url=https://albuterol.wtf/]albuterol canada[/url] [url=https://trazodone.click/]trazodone 50mg[/url] [url=https://malegra.xyz/]malegra 120[/url]
RichardFaply · August 28, 2022 at 9:47 pm
[url=http://wellbutrin.site/]900 mg wellbutrin[/url] [url=http://diclofenac.life/]diclofenac gel 25g[/url] [url=http://vardenafil.download/]how to buy levitra[/url] [url=http://methocarbamol.xyz/]robaxin for back pain[/url] [url=http://cytotec.best/]buy misoprostol australia[/url] [url=http://propecia.lol/]propecia 1mg[/url] [url=http://mebendazole.fun/]vermox sale[/url] [url=http://baclofen.site/]baclofen brand[/url]
Estebanguall · August 28, 2022 at 9:49 pm
[url=http://propecia.autos/]how to buy propecia online[/url]
Michaelemult · August 28, 2022 at 9:58 pm
[url=http://isotretinoin.life/]accutane prescription coupon[/url]
WimCounk · August 28, 2022 at 9:58 pm
[url=http://diclofenac.shop/]voltaren tablets australia[/url]
Michaeldrist · August 28, 2022 at 9:58 pm
[url=http://prednisone.moscow/]prednisone 20 mg medication[/url]
JaneCounk · August 28, 2022 at 10:06 pm
[url=http://erythromycin.fun/]erythromycin gel price[/url]
RobertFoold · August 28, 2022 at 10:22 pm
[url=https://lipitor.fun/]generic lipitor in us[/url]
JasonCounk · August 28, 2022 at 10:27 pm
[url=https://accutane.business/]generic accutane cost[/url]
AnnaCounk · August 28, 2022 at 10:28 pm
[url=http://trental.fun/]trental[/url]
AlanCounk · August 28, 2022 at 10:36 pm
[url=http://colchicine.fun/]colchicine over the counter usa[/url] [url=http://femaleviagra.xyz/]female viagra sale[/url]
JaneCounk · August 28, 2022 at 10:38 pm
[url=http://ciprofloxacin.cfd/]ciprofloxacin buy online[/url]
RichardFaply · August 28, 2022 at 10:41 pm
[url=http://vardenafil.ink/]levitra prices usa[/url] [url=http://erectafil.cfd/]erectafil 20[/url] [url=http://augmentin.fun/]augmentin 500 mg tablet price[/url] [url=http://anafranil.fun/]order anafranil from canada[/url]
TeoCounk · August 28, 2022 at 10:44 pm
[url=https://celexa.site/]citalopram for sale[/url]
Estebanguall · August 28, 2022 at 10:44 pm
[url=http://viagraltab.monster/]40 mg sildenafil[/url]
MichaelGuabe · August 28, 2022 at 10:47 pm
[url=https://viagraltab.monster/]cheap viagra buy[/url]
KimCounk · August 28, 2022 at 10:52 pm
[url=https://accutane.business/]accutane price in canada[/url]
AnnaCounk · August 28, 2022 at 10:59 pm
[url=http://trimox.site/]amoxicillin 500mg india[/url]
Davidhup · August 28, 2022 at 11:09 pm
[url=https://provigil.cfd/]modafinil prescription price[/url]
RicIsose · August 28, 2022 at 11:13 pm
[url=https://flomax.life/]generic of flomax[/url] [url=https://buyzoloft.guru/]zoloft 100mg cost[/url] [url=https://modafinil.hair/]provigil generic canada[/url] [url=https://viagraltab.monster/]viagra uk where to buy[/url] [url=https://prednisone.moscow/]price of prednisone[/url]
IvyCounk · August 28, 2022 at 11:17 pm
[url=http://fildena.site/]buy fildena 150 online[/url] [url=http://cialisetab.quest/]online cialis order[/url] [url=http://trental.fun/]trental generic[/url] [url=http://toradol.fun/]toradol order[/url]
EyeCounk · August 28, 2022 at 11:17 pm
[url=https://amitriptyline.fun/]amitriptyline 50mg coupon[/url] [url=https://onlinedrugstore.run/]world pharmacy india[/url] [url=https://modafinil.pics/]modafinil where to get[/url]
LisaCounk · August 28, 2022 at 11:27 pm
[url=https://viagragtab.monster/]female viagra online[/url]
TedCounk · August 28, 2022 at 11:35 pm
[url=https://viagragtab.monster/]can i get viagra over the counter[/url]
ElwoodGon · August 28, 2022 at 11:36 pm
[url=http://cialisltab.quest/]cialis canada buy online[/url]
JaneCounk · August 28, 2022 at 11:38 pm
[url=http://zoloft.hair/]zoloft tablets 250mg[/url]
IvyCounk · August 28, 2022 at 11:50 pm
[url=http://metformin.trade/]otc glucophage[/url] [url=http://lyrica.run/]lyrica 25[/url] [url=http://levitra.fun/]levitra 20mg buy online[/url] [url=http://trimox.site/]where to buy amoxicillin over the counter[/url] [url=http://retinoa.site/]retino 0.05[/url]
ZakCounk · August 29, 2022 at 12:06 am
[url=https://trimox.site/]augmentin tablet[/url] [url=https://trazodone.click/]trazodone hydrochloride 100 mg[/url] [url=https://xenical.fun/]orlistat tablets[/url] [url=https://viagraztab.quest/]viagra medicine price in india[/url] [url=https://furosemide.site/]lasix 80[/url] [url=https://valacyclovir.xyz/]valtrex uk over the counter[/url]
EyeCounk · August 29, 2022 at 12:19 am
[url=https://viagrattab.quest/]can i buy viagra[/url] [url=https://erythromycin.fun/]erythromycin 333 cost[/url] [url=https://budesonide.xyz/]budesonide capsules price[/url] [url=https://celexa.site/]celexa 80 mg[/url] [url=https://baclofen.icu/]how to get baclofen[/url] [url=https://albuterol.wtf/]buy albuterol online[/url] [url=https://ivermectin.tattoo/]ivermectin uk[/url] [url=https://xenical.fun/]where can i buy orlistat 120mg[/url]
ElwoodGon · August 29, 2022 at 12:24 am
[url=http://flomax.life/]can you order flomax online[/url]
WilliamWem · August 29, 2022 at 12:24 am
[url=https://provigil.cfd/]modafinil cheap uk[/url] [url=https://cialisltab.quest/]generic tadalafil in us[/url] [url=https://erectafil.cfd/]erectafil 10[/url] [url=https://synthroid.fun/]0.05 mg synthroid[/url] [url=https://propecia.lol/]best price for propecia 5mg online no prescription[/url] [url=https://buyzoloft.guru/]zoloft canada[/url] [url=https://augmentin.fun/]buy amoxicilina 500 mg[/url] [url=https://cialishtabs.monster/]cialis 20 mg price usa[/url]
DarrylSef · August 29, 2022 at 12:28 am
[url=http://cialisltab.quest/]paypal cialis online[/url] [url=http://accutane.pics/]buy accutane 5 mg[/url] [url=http://viagraltab.monster/]best generic viagra in india[/url] [url=http://cialishtabs.monster/]buy cialis online safely[/url]
CarlCounk · August 29, 2022 at 12:32 am
[url=http://xenical.fun/]orlistat buy online india[/url]
MiclTek · August 29, 2022 at 12:33 am
[url=http://vardenafil.download/]vardenafil australia[/url]
Davidhup · August 29, 2022 at 12:36 am
[url=https://synthroid.business/]synthroid 75 mcg[/url]
JaneCounk · August 29, 2022 at 12:48 am
[url=http://amitriptyline.fun/]buy amitriptyline 25mg[/url]
RicIsose · August 29, 2022 at 1:08 am
[url=https://budesonide.sbs/]budesonide pills[/url] [url=https://cytotec.best/]where to get misoprostol over the counter[/url]
DenCounk · August 29, 2022 at 1:10 am
[url=https://onlinepharmacy.ink/]super saver pharmacy[/url]
TommyHepsy · August 29, 2022 at 1:15 am
[url=https://prednisolone.site/]prednisolone tablets 25mg[/url]
ElwoodGon · August 29, 2022 at 1:24 am
[url=http://vardenafil.download/]vardenafil online uk[/url]
Edgarlor · August 29, 2022 at 1:35 am
[url=http://cialishtabs.monster/]buy online cialis[/url]
JasonCounk · August 29, 2022 at 1:38 am
[url=https://zestoretic.xyz/]zestoretic medication[/url]
AlanCounk · August 29, 2022 at 1:40 am
[url=http://levitra.fun/]where to buy levitra without prescription[/url] [url=http://trimox.site/]cheap augmentin online[/url] [url=http://onlinepharmacy.ink/]hq pharmacy online 365[/url]
Michaeldrist · August 29, 2022 at 1:43 am
[url=http://provigil.cfd/]uk online pharmacy modafinil[/url]
MiclTek · August 29, 2022 at 2:02 am
[url=http://buspar.life/]buspar discount[/url]
TedCounk · August 29, 2022 at 2:05 am
[url=https://trental.fun/]buy trental 400 mg[/url]
KiaCounk · August 29, 2022 at 2:06 am
[url=https://cialisbtabs.monster/]how much is cialis 20mg[/url]
Samuelraisk · August 29, 2022 at 2:10 am
[url=http://proscar.fun/]propecia medicine buy online[/url]
TeoCounk · August 29, 2022 at 2:18 am
[url=https://onlinepharmacy.ink/]best india pharmacy[/url]
MichaelDwego · August 29, 2022 at 2:27 am
[url=https://retinoa.fun/]retino[/url]
MiclTek · August 29, 2022 at 2:30 am
[url=http://diclofenac.life/]diclofenac 8 cream[/url]
JaneCounk · August 29, 2022 at 2:44 am
[url=http://plavix.fun/]plavix 75 mg tablet price in india[/url]
SueCounk · August 29, 2022 at 2:45 am
[url=http://ivermectin.tattoo/]buy stromectol pills[/url]
MiclTek · August 29, 2022 at 2:52 am
[url=http://vardenafil.download/]levitra generic online[/url]
MarkCounk · August 29, 2022 at 2:55 am
[url=https://furosemide.boutique/]furosemide best price[/url]
MiclTek · August 29, 2022 at 2:56 am
[url=http://mebendazole.fun/]vermox prescription[/url]
LisaCounk · August 29, 2022 at 3:05 am
[url=https://cialisbtabs.monster/]cialis daily 5 mg online[/url]
KimCounk · August 29, 2022 at 3:08 am
[url=https://triamterene.xyz/]triamterene-hctz 75-50[/url]
LisaCounk · August 29, 2022 at 3:15 am
[url=https://zanaflex.live/]tizanidine 2 mg tablet[/url]
RodneyTab · August 29, 2022 at 3:15 am
[url=http://mebendazole.fun/]vermox tablets uk[/url]
ElwoodGon · August 29, 2022 at 3:18 am
[url=http://propranolol.fun/]320 mg propranolol[/url]
PaulCounk · August 29, 2022 at 3:24 am
[url=https://zoloft.durban/]zoloft 300 mg daily[/url]
MarvinZem · August 29, 2022 at 3:26 am
[url=https://gabapentin.sbs/]gabapentin 800[/url]
MichaelDwego · August 29, 2022 at 3:34 am
[url=https://accutane.pics/]49 mg accutane[/url]
Edgarlor · August 29, 2022 at 3:39 am
[url=http://finasteride.fun/]propecia india price[/url]
ElwoodGon · August 29, 2022 at 3:41 am
[url=http://synthroid.wtf/]synthroid tabs 50mcg[/url]
BooCounk · August 29, 2022 at 3:43 am
[url=https://cialisctab.monster/]cialis 100mg cost[/url]
UgoCounk · August 29, 2022 at 3:44 am
[url=http://fildena.fun/]fildena 120mg[/url]
Michaelemult · August 29, 2022 at 4:18 am
[url=http://proscar.fun/]where can i buy propecia without a prescription[/url]
MiclTek · August 29, 2022 at 4:20 am
[url=http://prednisolone.site/]buy prendisalone on line uk[/url]
AnnaCounk · August 29, 2022 at 4:24 am
[url=http://colchicine.fun/]colchicine tablets 0.6 mg[/url]
PaulCounk · August 29, 2022 at 4:35 am
[url=https://baclofen.icu/]lioresal 10 mg tablets[/url]
Charlesaduse · August 29, 2022 at 4:36 am
[url=https://propranolol.fun/]buy inderal 10mg[/url]
SamCounk · August 29, 2022 at 5:13 am
[url=http://valacyclovir.fun/]order valtrex canada[/url] [url=http://accutane.business/]roaccutane[/url]
RicIsose · August 29, 2022 at 5:23 am
[url=https://wellbutrin.site/]cost of wellbutrin in canada[/url] [url=https://valtrex.run/]generic valtrex online without prescription[/url] [url=https://erectafil.cfd/]erectafil 10[/url] [url=https://malegra.life/]buy malegra online 100mg[/url]
RichardFaply · August 29, 2022 at 5:26 am
[url=http://budesonide.sbs/]budecort price[/url] [url=http://cipro.sbs/]cipro 250 mg[/url] [url=http://prednisolone.site/]medicine prednisolone 5mg[/url] [url=http://anafranil.fun/]buy anafranil[/url] [url=http://methocarbamol.xyz/]robaxin price india[/url] [url=http://isotretinoin.life/]order accutane online[/url]
EyeCounk · August 29, 2022 at 5:35 am
[url=https://colchicine.fun/]colchicine over the counter canada[/url] [url=https://zoloft.hair/]buy brand zoloft online[/url] [url=https://trimox.site/]amoxicillin 875 mg tablet coupon[/url] [url=https://malegra.xyz/]malegra 200 mg[/url] [url=https://valacyclovir.fun/]valtrex brand coupon[/url]
DarrylSef · August 29, 2022 at 5:43 am
[url=http://methocarbamol.xyz/]generic robaxin 500mg[/url] [url=http://synthroid.business/]buy synthroid online cheap[/url] [url=http://cialishtabs.monster/]cialis canada for sale[/url] [url=http://flomax.life/]how much is flomax[/url]
Michaeldrist · August 29, 2022 at 5:48 am
[url=http://synthroid.fun/]best generic synthroid[/url]
Estebanguall · August 29, 2022 at 5:53 am
[url=http://baclofen.site/]baclofen tablet price in india[/url]
RichardFaply · August 29, 2022 at 5:59 am
[url=http://lipitor.fun/]lipitor 80 mg price in india[/url] [url=http://tadacip.works/]tadacip 20 mg[/url] [url=http://buspar.life/]buspar 10 mg cost[/url] [url=http://cipro.sbs/]cipro 250 mg no prescription[/url]
SamCounk · August 29, 2022 at 6:07 am
[url=http://xenical.fun/]average cost of orlistat[/url] [url=http://viagraztab.quest/]buy real viagra uk[/url] [url=http://amitriptyline.site/]amitriptyline 70 mg[/url]
BooCounk · August 29, 2022 at 6:18 am
[url=https://modafinil.boutique/]how to get modafinil prescription[/url]
Edgarlor · August 29, 2022 at 6:20 am
[url=http://cialisltab.quest/]how to buy cialis in usa[/url]
TimothyThive · August 29, 2022 at 6:30 am
[url=https://synthroid.fun/]synthroid 137mg without prescription[/url]
DenCounk · August 29, 2022 at 6:32 am
[url=https://erythromycin.fun/]erythromycin cost[/url]
TeoCounk · August 29, 2022 at 6:43 am
[url=https://celexa.xyz/]celexa over the counter[/url]
Estebanguall · August 29, 2022 at 7:05 am
[url=http://sildenafil.moscow/]cheap viagra fast shipping[/url]
Samuelraisk · August 29, 2022 at 7:08 am
[url=http://finasteride.fun/]finasteride 1mg uk[/url]
TommyHepsy · August 29, 2022 at 7:09 am
[url=https://synthroid.fun/]synthroid tablets in india[/url]
TedCounk · August 29, 2022 at 7:22 am
[url=https://toradol.fun/]toradol pills[/url]
DarrylSef · August 29, 2022 at 7:23 am
[url=http://prozac.moscow/]prozac 10 mg cost[/url] [url=http://flomax.life/]flomax sale[/url] [url=http://mebendazole.fun/]vermox otc uk[/url] [url=http://synthroid.fun/]75 mcg synthroid no prescription[/url] [url=http://erectafil.cfd/]buy erectafil 20[/url] [url=http://lexapro.fun/]how much is lexapro 20 mg[/url] [url=http://zoloft.sbs/]can i buy zoloft in mexico[/url]
BooCounk · August 29, 2022 at 7:23 am
[url=https://viagraqtab.quest/]100mg viagra pill[/url]
TedCounk · August 29, 2022 at 7:30 am
[url=https://celexa.site/]100mg celexa[/url]
TeoCounk · August 29, 2022 at 7:48 am
[url=https://albuterol.wtf/]can you purchase albuterol over the counter[/url]
Edgarlor · August 29, 2022 at 8:00 am
[url=http://buyzoloft.guru/]zoloft brand[/url]
JoeCounk · August 29, 2022 at 8:03 am
[url=https://plavix.fun/]buy clopidogrel 75 mg uk[/url] [url=https://fildena.site/]buy fildena 100mg[/url] [url=https://accutane.business/]can you order accutane online[/url] [url=https://zanaflex.run/]buy zanaflex 4mg online[/url] [url=https://trental.fun/]trental 400 mg buy online in india[/url] [url=https://erythromycin.fun/]erythromycin 200 mg[/url] [url=https://metformin.trade/]cost of metformin 500mg[/url] [url=https://trimox.site/]augmentin 500mg price[/url]
Charlesaduse · August 29, 2022 at 8:05 am
[url=https://celebrex.life/]50 mg celebrex[/url]
Estebanguall · August 29, 2022 at 8:08 am
[url=http://propecia.autos/]finasteride proscar[/url]
Michaeldrist · August 29, 2022 at 8:19 am
[url=http://buyzoloft.guru/]generic zoloft[/url]
JasonCounk · August 29, 2022 at 8:19 am
[url=https://viagraztab.quest/]where can i get viagra over the counter[/url]
TimothyThive · August 29, 2022 at 8:20 am
[url=https://flomax.life/]cheap flomax generic[/url]
EvaCounk · August 29, 2022 at 8:23 am
[url=http://cialisetab.quest/]can you buy cialis over the counter uk[/url]
SueCounk · August 29, 2022 at 8:27 am
[url=http://viagragtab.monster/]viagra rx coupon[/url]
Curtisvibia · August 29, 2022 at 8:39 am
[url=https://erectafil.cfd/]buy erectafil 20[/url]
JackCounk · August 29, 2022 at 8:53 am
[url=https://modafinil.pics/]modafinil canada prescription[/url]
JoeCounk · August 29, 2022 at 8:56 am
[url=https://valacyclovir.fun/]valtrex price australia[/url] [url=https://erythromycin.fun/]erythromycin uk price[/url] [url=https://silagra.life/]silagra 50[/url] [url=https://hydroxyzine.xyz/]atarax otc[/url] [url=https://furosemide.site/]furosemide 40 mg pill[/url] [url=https://metformin.trade/]buy metformin no prescription[/url] [url=https://femaleviagra.xyz/]viagra tablet india[/url] [url=https://cialisetab.quest/]generic cialis buy online[/url]
RodneyTab · August 29, 2022 at 9:21 am
[url=http://synthroid.wtf/]synthroid online canada[/url]
JackCounk · August 29, 2022 at 9:26 am
[url=https://modafinil.pics/]where can i purchase modafinil[/url]
ZakCounk · August 29, 2022 at 9:29 am
[url=https://valacyclovir.fun/]can i buy valtrex over the counter[/url] [url=https://zoloft.hair/]zoloft 400 mg[/url] [url=https://albuterol.wtf/]ventolin tablet price[/url] [url=https://celexa.site/]cost of celexa[/url] [url=https://azithromycin.wtf/]zithromax online[/url] [url=https://silagra.life/]silagra price in india[/url] [url=https://celexa.xyz/]celexa 40 mg[/url] [url=https://metformin.trade/]glucophage singapore[/url]
PaulCounk · August 29, 2022 at 9:33 am
[url=https://modafinil.pics/]modafinil online us[/url]
ElwoodGon · August 29, 2022 at 9:50 am
[url=http://cialisltab.quest/]tadalafil uk pharmacy[/url]
CarlCounk · August 29, 2022 at 10:00 am
[url=http://zoloft.hair/]zoloft 50 mg price[/url]
WimCounk · August 29, 2022 at 10:05 am
[url=http://fluconazole.cfd/]diflucan online cheap[/url]
AshCounk · August 29, 2022 at 10:15 am
[url=https://cialisjtabs.quest/]cialis buy no prescription[/url] [url=https://accutane.boutique/]buy accutane online canada[/url] [url=https://medrol.boutique/]medrol 40mg[/url] [url=https://cialisotab.quest/]cialis soft[/url] [url=https://lexapro.live/]cheap lexapro 20 mg[/url] [url=https://levaquin.shop/]levaquin antibiotics[/url] [url=https://zoloft.store/]50 zoloft[/url]
ElwoodGon · August 29, 2022 at 10:30 am
[url=http://finasteride.fun/]buy real propecia online[/url]
JudyCounk · August 29, 2022 at 10:44 am
[url=http://zanaflex.run/]tizanidine 2mg tablet price[/url]
MichaelGuabe · August 29, 2022 at 11:02 am
[url=https://finasteride.fun/]propecia buy[/url]
Michaelemult · August 29, 2022 at 11:13 am
[url=http://flomax.life/]how to get flomax[/url]
WilliamWem · August 29, 2022 at 11:13 am
[url=https://budesonide.sbs/]budesonide medicine[/url] [url=https://tadacip.works/]tadacip canada[/url]
LisaCounk · August 29, 2022 at 11:17 am
[url=https://furosemide.site/]220 lasix[/url]
SamCounk · August 29, 2022 at 11:18 am
[url=http://zanaflex.live/]tizanidine generic[/url] [url=http://furosemide.boutique/]lasix 60 mg[/url] [url=http://trental.fun/]trental 400 online[/url] [url=http://levitra.fun/]levitra 20mg tablets[/url] [url=http://colchicine.fun/]colchicine uk[/url] [url=http://hydroxyzine.xyz/]buy atarax 25mg online without rx[/url]
IvyCounk · August 29, 2022 at 11:22 am
[url=http://toradol.fun/]toradol generic medication[/url] [url=http://trazodone.click/]desyrel price[/url] [url=http://trimox.site/]generic of augmentin[/url] [url=http://femaleviagra.xyz/]viagra online order india[/url] [url=http://modafinil.pics/]modafinil 100mg buy online[/url] [url=http://cialisbtabs.monster/]best price cialis 10mg[/url] [url=http://silagra.life/]silagra 100 mg tablet[/url] [url=http://levitra.fun/]order vardenafil online[/url]
RichardFaply · August 29, 2022 at 11:52 am
[url=http://prednisone.moscow/]can you buy prednisone online uk[/url] [url=http://lopressor.xyz/]lopressor 12.5 mg[/url] [url=http://buspar.life/]buspar price in india[/url] [url=http://doxycycline.sbs/]doxycycline medication cost[/url] [url=http://wellbutrin.site/]cost for generic wellbutrin[/url]
Michaeldrist · August 29, 2022 at 12:00 pm
[url=http://cialishtabs.monster/]canada order cialis[/url]
ElwoodGon · August 29, 2022 at 12:21 pm
[url=http://gabapentin.sbs/]neurontin 300 mg caps[/url]
MarvinZem · August 29, 2022 at 12:24 pm
[url=https://zoloft.sbs/]zoloft online india[/url]
MiclTek · August 29, 2022 at 12:32 pm
[url=http://augmentin.fun/]amoxicillin 500mg india[/url]
Samuelraisk · August 29, 2022 at 12:40 pm
[url=http://propranolol.fun/]propranolol 240 mg[/url]
IvyCounk · August 29, 2022 at 12:52 pm
[url=http://levitra.fun/]cheap levitra for sale[/url] [url=http://ivermectin.tattoo/]ivermectin cost[/url] [url=http://cialisetab.quest/]generic tadalafil[/url] [url=http://toradol.fun/]toradol for migraines[/url]
UgoCounk · August 29, 2022 at 1:06 pm
[url=http://ibuprofenmotrin.monster/]buy motrin 800[/url]
EyeCounk · August 29, 2022 at 1:18 pm
[url=https://malegra.xyz/]malegra pills[/url] [url=https://cialisetab.quest/]cialis 20mg price in india online[/url] [url=https://valacyclovir.xyz/]how much is valtrex canada[/url] [url=https://baclofen.icu/]buy baclofen online canada[/url] [url=https://lyrica.run/]cost of generic lyrica[/url]
UgoCounk · August 29, 2022 at 1:20 pm
[url=http://diclofenac.cfd/]voltaren coupon[/url]
Samuelraisk · August 29, 2022 at 1:36 pm
[url=http://cipro.sbs/]ciprofloxacin 100mg[/url]
CarlCounk · August 29, 2022 at 1:37 pm
[url=http://bactrim.xyz/]bactrim 160[/url]
Michaeldrist · August 29, 2022 at 1:41 pm
[url=http://cialisltab.quest/]cialis 2.5 mg online[/url]
JudyCounk · August 29, 2022 at 1:51 pm
[url=http://nexium.fun/]nexium otc canada[/url]
JimCounk · August 29, 2022 at 1:57 pm
[url=https://onlinepharmacy.ink/]indian pharmacies safe[/url]
MiaCounk · August 29, 2022 at 2:02 pm
[url=http://plavix.fun/]buy clopidogrel[/url]
Michaelemult · August 29, 2022 at 2:04 pm
[url=http://vardenafil.download/]levitra for daily use[/url]
Samuelraisk · August 29, 2022 at 2:05 pm
[url=http://lipitor.fun/]lipitor 5 mg tablet[/url]
Jameseloro · August 29, 2022 at 2:10 pm
[url=http://viagraltab.monster/]sildenafil buy canada[/url] [url=http://proscar.fun/]propecia medicine in india[/url] [url=http://vardenafil.download/]vardenafil hcl 20mg tab[/url]
RicIsose · August 29, 2022 at 2:12 pm
[url=https://malegra.life/]buy malegra online 100mg[/url] [url=https://modafinil.hair/]provigil 200 mg coupon[/url]
IvyCounk · August 29, 2022 at 2:20 pm
[url=http://levitra.fun/]vardenafil tablets in india[/url] [url=http://nexium.digital/]nexium 10 mg capsule[/url] [url=http://amitriptyline.site/]can you buy elavil online[/url] [url=http://lyrica.run/]lyrica pills price[/url] [url=http://malegra.xyz/]buy malegra pills[/url] [url=http://zanaflex.live/]buy tizanidine no prescription[/url] [url=http://valacyclovir.xyz/]over the counter valtrex medication[/url] [url=http://retinoa.site/]retino 0.05 gel[/url]
AlanCounk · August 29, 2022 at 2:21 pm
[url=http://trimox.site/]cheapest amoxicillin 875[/url] [url=http://silagra.life/]buy cheap silagra[/url] [url=http://malegra.xyz/]buy malegra online 100mg[/url] [url=http://amitriptyline.site/]elavil brand name[/url] [url=http://baclofen.icu/]baclofen cream[/url] [url=http://nexium.fun/]can i buy nexium over the counter uk[/url] [url=http://zanaflex.run/]buy zanaflex online with no prescription[/url] [url=http://ciprofloxacin.cfd/]ciprofloxacin brand name[/url]
KimCounk · August 29, 2022 at 2:32 pm
[url=https://furosemide.site/]buy lasixonline[/url]
UgoCounk · August 29, 2022 at 2:35 pm
[url=http://acyclovir.company/]acyclovir no presciption[/url]
Charlesaduse · August 29, 2022 at 2:36 pm
[url=https://propecia.lol/]propecia for sale canada[/url]
YonCounk · August 29, 2022 at 2:44 pm
[url=https://azithromycin.wtf/]azithromycin medicine over the counter[/url]
ElwoodGon · August 29, 2022 at 2:49 pm
[url=http://zoloft.sbs/]buy zoloft canada[/url]
JasonCounk · August 29, 2022 at 2:50 pm
[url=https://cialisetab.quest/]can you purchase cialis over the counter[/url]
Michaelemult · August 29, 2022 at 2:50 pm
[url=http://zoloft.sbs/]buy brand name zoloft online[/url]
RichardFaply · August 29, 2022 at 2:51 pm
[url=http://gabapentin.sbs/]gabapentin medication[/url] [url=http://zoloft.sbs/]zoloft medication[/url]
AlanCounk · August 29, 2022 at 2:55 pm
[url=http://furosemide.boutique/]buy lasix tablets[/url] [url=http://onlinedrugstore.run/]trustworthy canadian pharmacy[/url] [url=http://malegra.xyz/]malegra dxt[/url] [url=http://triamterene.xyz/]triamterene-hctz 75-50mg tab[/url] [url=http://bactrim.xyz/]bactrim 1000 mg[/url] [url=http://ciprofloxacin.cfd/]cipro in mexico[/url] [url=http://xenical.fun/]xenical prescription coupon[/url]
Samuelraisk · August 29, 2022 at 2:55 pm
[url=http://prednisolone.site/]prednisone prednisolone[/url]
TeoCounk · August 29, 2022 at 2:58 pm
[url=https://viagrattab.quest/]sildenafil pills online[/url]
Jameseloro · August 29, 2022 at 3:14 pm
[url=http://gabapentin.sbs/]price gabapentin 600 mg[/url] [url=http://prednisone.moscow/]buy prednisone online canada without prescription[/url] [url=http://baclofen.site/]10 mg baclofen canada[/url] [url=http://flomax.life/]where to buy otc flomax[/url] [url=http://viagraltab.monster/]where to buy female viagra[/url] [url=http://finasteride.fun/]how to order propecia[/url]
JimCounk · August 29, 2022 at 3:16 pm
[url=https://azithromycin.wtf/]azithromycin 300 mg[/url]
ElwoodGon · August 29, 2022 at 3:18 pm
[url=http://finpecia.life/]propecia medication[/url]
Davidhup · August 29, 2022 at 3:27 pm
[url=https://vardenafil.ink/]levitra 10 mg price[/url]
IvyCounk · August 29, 2022 at 3:35 pm
[url=http://onlinedrugstore.run/]polish pharmacy online uk[/url] [url=http://xenical.fun/]buy orlistat 120mg online[/url] [url=http://valacyclovir.fun/]drug discount valtrex generic[/url] [url=http://femaleviagra.xyz/]viagra tablets pharmacy[/url] [url=http://hydroxyzine.xyz/]can you buy atarax over the counter[/url] [url=http://azithromycin.wtf/]generic zithromax online[/url] [url=http://ivermectin.tattoo/]ivermectin drug[/url]
Samuelraisk · August 29, 2022 at 3:48 pm
[url=http://malegra.life/]buy malegra online[/url]
AshCounk · August 29, 2022 at 4:04 pm
[url=https://cymbaltaduloxetin.com/]cheap cymbalta online[/url] [url=https://buyprednisolone.works/]online prednisolone[/url] [url=https://clomid.solutions/]clomid cost uk[/url] [url=https://clindamycin.boutique/]how much is clindamycin 150mg[/url] [url=https://olmesartan.quest/]benicar buy online[/url] [url=https://finasteride.boutique/]buy propecia pills[/url] [url=https://prednisolone.boutique/]prednisolone 6131463705[/url] [url=https://tadalafil.moscow/]cost daily cialis[/url]
CarlCounk · August 29, 2022 at 4:11 pm
[url=http://nexium.fun/]nexium price mexico[/url]
WimCounk · August 29, 2022 at 4:14 pm
[url=http://advair.works/]advair 14[/url]
MarkCounk · August 29, 2022 at 4:16 pm
[url=https://trental.fun/]order trental[/url]
WimCounk · August 29, 2022 at 4:16 pm
[url=http://cafergot.guru/]cheap cafergot[/url]
MiclTek · August 29, 2022 at 4:23 pm
[url=http://propecia.autos/]finasteride 1mg best price[/url]
RobertFoold · August 29, 2022 at 4:34 pm
[url=https://clomid.moscow/]how much is clomid 100mg[/url]
YonCounk · August 29, 2022 at 4:39 pm
[url=https://nexium.fun/]nexium 20mg coupon[/url]
CarlCounk · August 29, 2022 at 4:45 pm
[url=http://zanaflex.live/]tizanidine online purchase[/url]
MiaCounk · August 29, 2022 at 4:46 pm
[url=http://colchicine.fun/]colchicine 500mcg[/url]
Jameseloro · August 29, 2022 at 4:46 pm
[url=http://celebrex.life/]celebrex 200 mg discount[/url] [url=http://augmentin.fun/]augmentin 625 in usa[/url] [url=http://lopressor.xyz/]50 mg lopressor[/url] [url=http://erectafil.cfd/]buy erectafil[/url] [url=http://proscar.fun/]finasteride 5mg[/url] [url=http://doxycycline.sbs/]doxycycline otc[/url] [url=http://synthroid.business/]synthroid 88 mcg[/url] [url=http://tadacip.works/]tadacip canada[/url]
MarkCounk · August 29, 2022 at 4:58 pm
[url=https://furosemide.boutique/]furosemide 80 mg tablet[/url]
DavisMug · August 29, 2022 at 4:59 pm
[url=http://clomid.moscow/]clomid 25mg[/url]
AmyCounk · August 29, 2022 at 5:03 pm
[url=http://colchicine.fun/]colchicine 500mcg tablets[/url]
AmyCounk · August 29, 2022 at 5:04 pm
[url=http://furosemide.site/]purchase lasix online[/url]
JoeCounk · August 29, 2022 at 5:05 pm
[url=https://lyrica.run/]buy lyrica cheap online[/url] [url=https://viagragtab.monster/]where can i get viagra in canada[/url] [url=https://silagra.life/]silagra soft[/url] [url=https://celexa.xyz/]celexa buy online[/url] [url=https://albuterol.wtf/]mexico pharmacy albuterol[/url] [url=https://trazodone.click/]trazodone uk buy[/url] [url=https://furosemide.site/]lasix on line without prescription[/url] [url=https://metformin.trade/]metformin hydrochloride[/url]
RodneyTab · August 29, 2022 at 5:08 pm
[url=http://viagraltab.monster/]where can i buy sildenafil online safely[/url]
EyeCounk · August 29, 2022 at 5:21 pm
[url=https://amitriptyline.fun/]amitriptyline brand name australia[/url] [url=https://colchicine.fun/]colchicine 0.6 mg without prescription[/url] [url=https://nexium.digital/]buy nexium australia[/url] [url=https://zoloft.durban/]zoloft discount coupon[/url] [url=https://toradol.fun/]cost toradol[/url] [url=https://femaleviagra.xyz/]generic viagra sales[/url]
MichaelDwego · August 29, 2022 at 5:24 pm
[url=https://prednisone.moscow/]prednisone pharmacy[/url]
MiclTek · August 29, 2022 at 5:30 pm
[url=http://atomoxetine.fun/]canadian pharmacy strattera[/url]
BooCounk · August 29, 2022 at 5:36 pm
[url=https://fluoxetine.guru/]prozac india cost[/url]
IvyCounk · August 29, 2022 at 5:46 pm
[url=http://valacyclovir.fun/]valtrex cost australia[/url] [url=http://ciprofloxacin.cfd/]ciprofloxacin without prescription[/url] [url=http://trazodone.click/]trazodone india online pharmacy[/url] [url=http://budesonide.xyz/]budecort 400[/url] [url=http://trental.fun/]trental tablet cost[/url] [url=http://bactrim.xyz/]bactrim tablets 480 mg[/url]
RodneyTab · August 29, 2022 at 5:55 pm
[url=http://vardenafil.download/]levitra discount prices[/url]
EvaCounk · August 29, 2022 at 6:00 pm
[url=http://malegra.xyz/]buy malegra 100[/url]
DavisMug · August 29, 2022 at 6:34 pm
[url=http://baclofen.site/]baclofen tablet price[/url]
CarlCounk · August 29, 2022 at 6:37 pm
[url=http://zoloft.durban/]cost of brand name zoloft[/url]
MichaelDwego · August 29, 2022 at 6:41 pm
[url=https://buspar.life/]buspar in canada[/url]
Curtisvibia · August 29, 2022 at 6:51 pm
[url=https://cytotec.best/]misoprostol otc[/url]
AshCounk · August 29, 2022 at 7:02 pm
[url=https://trimox.today/]how much is amoxicillin online[/url] [url=https://strattera.cfd/]strattera generic prescription price[/url] [url=https://onlinepharmacy.agency/]best online foreign pharmacies[/url] [url=https://trentalgen.com/]trental 40 mg[/url]
MarkCounk · August 29, 2022 at 7:13 pm
[url=https://celexa.xyz/]citalopram canada[/url]
MiaCounk · August 29, 2022 at 7:15 pm
[url=http://zestoretic.xyz/]zestoretic 20 25mg[/url]
RichardFaply · August 29, 2022 at 7:33 pm
[url=http://retinoa.fun/]retino cream[/url] [url=http://tadacip.works/]tadacip 20 canada[/url] [url=http://atomoxetine.fun/]buy strattera 40 mg[/url] [url=http://diclofenac.life/]voltaren 100g gel[/url]
DavisMug · August 29, 2022 at 7:41 pm
[url=http://synthroid.business/]synthroid 0.125[/url]
Samuelraisk · August 29, 2022 at 7:57 pm
[url=http://lipitor.fun/]lipitor rx cost[/url]
MiclTek · August 29, 2022 at 8:06 pm
[url=http://zoloft.sbs/]zoloft pill 100 mg[/url]
RichardFaply · August 29, 2022 at 8:31 pm
[url=http://cialishtabs.monster/]cialis 2 mg[/url] [url=http://valtrex.run/]valtrex gel[/url] [url=http://modafinil.hair/]online modafinil prescription[/url] [url=http://vardenafil.ink/]discount levitra prices[/url] [url=http://celebrex.life/]celebrex medicine price[/url]
MichaelDwego · August 29, 2022 at 8:33 pm
[url=https://lipitor.fun/]buy lipitor in india[/url]
MiclTek · August 29, 2022 at 8:44 pm
[url=http://doxycycline.sbs/]doxycycline 100mg generic[/url]
RicIsose · August 29, 2022 at 8:47 pm
[url=https://modafinil.hair/]modafinil uk prescription[/url] [url=https://atomoxetine.fun/]strattera 400 mg[/url] [url=https://propranolol.fun/]inderal 40mg 80mg[/url] [url=https://cipro.sbs/]cipro antibiotics[/url]
MiclTek · August 29, 2022 at 9:04 pm
[url=http://buspar.life/]buspar 7.5[/url]
KimCounk · August 29, 2022 at 9:05 pm
[url=https://furosemide.site/]purchase lasix online[/url]
TedCounk · August 29, 2022 at 9:09 pm
[url=https://triamterene.xyz/]triamterene 37.5 25 mg[/url]
DenCounk · August 29, 2022 at 9:11 pm
[url=https://fildena.site/]fildena 120[/url]
AnnaCounk · August 29, 2022 at 9:26 pm
[url=http://zanaflex.run/]tizanidine 20mg[/url]
JosephMaict · August 29, 2022 at 9:33 pm
[url=https://viagraltab.monster/]generic viagra in india[/url] [url=https://prozac.moscow/]prozac 20 mg price[/url]
IvyCounk · August 29, 2022 at 9:47 pm
[url=http://xenical.fun/]can you buy orlistat over the counter[/url] [url=http://baclofen.icu/]baclofen cream over the counter[/url]
MaryCounk · August 29, 2022 at 10:00 pm
[url=https://trental.fun/]trental 400 mg price[/url] [url=https://viagrattab.quest/]best price viagra uk[/url] [url=https://amitriptyline.fun/]amitriptyline online pharmacy[/url] [url=https://celexa.site/]40 mg citalopram[/url] [url=https://trimox.site/]amoxicillin medication[/url] [url=https://strattera.icu/]80mg strattera cost[/url] [url=https://cialisbtabs.monster/]cialis prices in mexico[/url]
IvyCounk · August 29, 2022 at 10:03 pm
[url=http://zoloft.hair/]zoloft online australia[/url] [url=http://lyrica.run/]medicine lyrica 75 mg[/url] [url=http://baclofen.icu/]baclofen buy online uk[/url] [url=http://zanaflex.run/]tizanidine drug[/url] [url=http://trental.fun/]trental 400 mg tablet buy[/url] [url=http://colchicine.fun/]colchicine buy online india[/url]
RichardFaply · August 29, 2022 at 10:06 pm
[url=http://lipitor.fun/]can i buy lipitor over the counter[/url] [url=http://cytotec.best/]buy cytotec without prescription[/url] [url=http://sildenafil.moscow/]sildenafil price comparison uk[/url]
EvaCounk · August 29, 2022 at 10:07 pm
[url=http://zanaflex.live/]tizanidine medicine[/url]
JudyCounk · August 29, 2022 at 10:20 pm
[url=http://valacyclovir.fun/]generic valtrex[/url]
JimCounk · August 29, 2022 at 10:28 pm
[url=https://amitriptyline.fun/]buy elavil cheap[/url]
SueCounk · August 29, 2022 at 10:34 pm
[url=http://baclofen.icu/]lioresal price[/url]
Samuelraisk · August 29, 2022 at 10:37 pm
[url=http://prozac.moscow/]fluoxetine prescription[/url]
Michaeldrist · August 29, 2022 at 10:39 pm
[url=http://lopressor.xyz/]order lopressor[/url]
JaneCounk · August 29, 2022 at 10:50 pm
[url=http://ciprofloxacin.cfd/]ciprofloxacin 500 mg pill[/url]
AshCounk · August 29, 2022 at 10:54 pm
[url=https://motiliumdomperidone.monster/]motilium[/url] [url=https://tenormin.works/]atenolol brand name tablet[/url] [url=https://sildalis.guru/]buy sildalis[/url] [url=https://levaquin.digital/]order levaquin[/url] [url=https://diflucan.shop/]diflucan discount coupon[/url] [url=https://allopurinol.company/]where to buy cheap allopurinol[/url] [url=https://tretinoin.digital/]retin a without rx[/url]
KimCounk · August 29, 2022 at 11:00 pm
[url=https://trental.fun/]trental 400 online purchase[/url]
AmyCounk · August 29, 2022 at 11:01 pm
[url=http://zestoretic.xyz/]medication zestoretic[/url]
KimCounk · August 29, 2022 at 11:15 pm
[url=https://zoloft.durban/]zoloft for sale without prescription[/url]
JoeCounk · August 29, 2022 at 11:24 pm
[url=https://amitriptyline.fun/]generic elavil 25 mg tablets[/url] [url=https://viagrattab.quest/]best buy viagra online[/url] [url=https://furosemide.site/]furosemide 40 mg buy online[/url] [url=https://valacyclovir.xyz/]valtrex medication price[/url] [url=https://strattera.icu/]strattera 80 mg cost[/url] [url=https://celexa.xyz/]buy citalopram 10mg online[/url]
ElwoodGon · August 29, 2022 at 11:32 pm
[url=http://synthroid.business/]synthroid 100 mcg india[/url]
RodneyTab · August 29, 2022 at 11:33 pm
[url=http://cytotec.best/]where can i get misoprostol[/url]
ZakCounk · August 29, 2022 at 11:38 pm
[url=https://valacyclovir.fun/]valtrex price canada[/url] [url=https://levitra.fun/]generic levitra online pharmacy[/url] [url=https://toradol.fun/]generic toradol[/url] [url=https://furosemide.boutique/]lasix 400 mg[/url] [url=https://xenical.fun/]where can i buy cheap orlistat tablets[/url] [url=https://azithromycin.wtf/]azithromycin 500 mg tablet price[/url] [url=https://accutane.business/]accutane australia buy online[/url]
DarrylSef · August 29, 2022 at 11:42 pm
[url=http://budesonide.sbs/]budesonide 200[/url] [url=http://synthroid.business/]levothyroxine synthroid[/url] [url=http://cytotec.best/]misoprostol medication[/url] [url=http://synthroid.fun/]0.137 mg synthroid[/url] [url=http://isotretinoin.life/]buy accutane tablets[/url] [url=http://lexapro.fun/]lexapro pills[/url] [url=http://modafinil.hair/]modafinil capsules[/url] [url=http://vardenafil.download/]generic levitra mexico[/url]
WimCounk · August 29, 2022 at 11:48 pm
[url=http://lasixtab.online/]lasix tablets online[/url]
AshCounk · August 29, 2022 at 11:49 pm
[url=https://prednisone.guru/]where can i buy prednisone without prescription[/url] [url=https://hydroxyzine.shop/]prescription atarax 25mg[/url] [url=https://buyamoxicillin.guru/]amoxicillin mexico buy[/url] [url=https://antabuse.golf/]how to get antabuse in canada[/url] [url=https://strattera.guru/]buy strattera in mexico[/url]
CarlCounk · August 30, 2022 at 12:54 am
[url=http://malegra.xyz/]buy malegra 200 mg[/url]
JaneCounk · August 30, 2022 at 12:55 am
[url=http://xenical.fun/]xenical prescription online[/url]
TedCounk · August 30, 2022 at 12:55 am
[url=https://budesonide.xyz/]budesonide 9 mg tablets price[/url]
JudyCounk · August 30, 2022 at 1:08 am
[url=http://budesonide.xyz/]over the counter budesonide[/url]
ElwoodGon · August 30, 2022 at 1:10 am
[url=http://prednisone.moscow/]deltasone 10 mg[/url]
Michaelemult · August 30, 2022 at 1:12 am
[url=http://anafranil.fun/]anafranil medication[/url]
JoeCounk · August 30, 2022 at 1:28 am
[url=https://zoloft.hair/]can i buy zoloft online[/url] [url=https://albuterol.wtf/]cheap albuterol online[/url] [url=https://hydroxyzine.xyz/]atarax cost[/url] [url=https://plavix.fun/]buy plavix cheap[/url] [url=https://zestoretic.xyz/]zestoretic 30 25mg[/url]
Samuelraisk · August 30, 2022 at 1:29 am
[url=http://proscar.fun/]proscar hair[/url]
Samuelraisk · August 30, 2022 at 1:30 am
[url=http://synthroid.business/]synthroid 75 mg[/url]
AnnaCounk · August 30, 2022 at 1:41 am
[url=http://furosemide.boutique/]medication furosemide 40 mg[/url]
MiaCounk · August 30, 2022 at 1:45 am
[url=http://silagra.life/]silagra online uk[/url]
MiclTek · August 30, 2022 at 1:57 am
[url=http://tadacip.works/]tadacip 20 mg[/url]
Charlesaduse · August 30, 2022 at 2:11 am
[url=https://lopressor.xyz/]lopressor 25 generic[/url]
MarkCounk · August 30, 2022 at 2:17 am
[url=https://baclofen.icu/]baclofen 10 mg tablets[/url]
TedCounk · August 30, 2022 at 2:21 am
[url=https://azithromycin.wtf/]azithromycin 250 1mg[/url]
ElwoodGon · August 30, 2022 at 2:39 am
[url=http://propranolol.fun/]propranolol brand[/url]
DenCounk · August 30, 2022 at 2:47 am
[url=https://zanaflex.run/]zanaflex 4mg price[/url]
Samuelraisk · August 30, 2022 at 2:47 am
[url=http://synthroid.wtf/]synthroid 15 mcg[/url]
IvyCounk · August 30, 2022 at 2:48 am
[url=http://cialisetab.quest/]cialis cost usa[/url] [url=http://trimox.site/]amoxicillin 500mg capsules price india[/url] [url=http://amitriptyline.site/]30mg amitriptyline[/url] [url=http://trazodone.click/]trazodone canada[/url] [url=http://nexium.digital/]nexium 40 mg tablets price[/url] [url=http://furosemide.site/]buy cheap furosemide[/url]
PaulCounk · August 30, 2022 at 2:51 am
[url=https://nexium.fun/]nexium uk cost[/url]
MarkCounk · August 30, 2022 at 2:59 am
[url=https://triamterene.xyz/]triamterene 75mg hctz 50mg tablets[/url]
TommyHepsy · August 30, 2022 at 3:01 am
[url=https://erectafil.cfd/]erectafil 40[/url]
RodneyTab · August 30, 2022 at 3:08 am
[url=http://synthroid.business/]synthroid 250[/url]
JoeCounk · August 30, 2022 at 3:08 am
[url=https://amitriptyline.fun/]amitriptyline 25 mg brand name[/url] [url=https://levitra.fun/]levitraonlinemeds[/url]
DarrylSef · August 30, 2022 at 3:16 am
[url=http://cialishtabs.monster/]real cialis prices[/url] [url=http://onlinepharmacy.moscow/]polish pharmacy online uk[/url] [url=http://prednisolone.site/]methylprednisolone[/url] [url=http://lexapro.fun/]5 lexapro[/url] [url=http://diclofenac.life/]diclofenac pills over the counter[/url] [url=http://cytotec.best/]cytotec where to buy[/url]
AmyCounk · August 30, 2022 at 3:17 am
[url=http://nexium.digital/]nexium 40 mg generic[/url]
DarrylSef · August 30, 2022 at 3:24 am
[url=http://synthroid.fun/]synthroid 10 mcg[/url] [url=http://atomoxetine.fun/]strattera australia price[/url] [url=http://cytotec.best/]cytotec tablets online[/url]
ElwoodGon · August 30, 2022 at 3:27 am
[url=http://lexapro.fun/]lexapro prescription online[/url]
AnnaCounk · August 30, 2022 at 3:36 am
[url=http://silagra.life/]buy silagra 100 mg[/url]
UgoCounk · August 30, 2022 at 3:46 am
[url=http://abilify.shop/]abilify 30 mg[/url]
AmyCounk · August 30, 2022 at 3:47 am
[url=http://plavix.fun/]buy clopidogrel[/url]
Edgarlor · August 30, 2022 at 3:55 am
[url=http://finasteride.fun/]how to get propecia in singapore[/url]
MarvinZem · August 30, 2022 at 3:57 am
[url=https://modafinil.hair/]how much is generic provigil[/url]
JackCounk · August 30, 2022 at 3:58 am
[url=https://trental.fun/]generic trental[/url]
TeoCounk · August 30, 2022 at 4:06 am
[url=https://trazodone.click/]buy trazodone online usa[/url]
SueCounk · August 30, 2022 at 4:06 am
[url=http://zanaflex.live/]tizanidine generic 4mg[/url]
RodneyTab · August 30, 2022 at 4:18 am
[url=http://synthroid.business/]cost of brand name synthroid[/url]
KimCounk · August 30, 2022 at 4:20 am
[url=https://accutane.business/]how can i get accutane online[/url]
Michaelemult · August 30, 2022 at 4:28 am
[url=http://sildenafil.moscow/]sildenafil prices[/url]
DarrylSef · August 30, 2022 at 4:28 am
[url=http://accutane.pics/]buy accutane 10mg online[/url] [url=http://proscar.fun/]propecia 5mg cost[/url] [url=http://propranolol.fun/]price of propranolol[/url]
EyeCounk · August 30, 2022 at 4:32 am
[url=https://amitriptyline.site/]elavil headaches[/url] [url=https://onlinedrugstore.run/]online pharmacy delivery delhi[/url] [url=https://accutane.business/]buy accutane in india[/url] [url=https://hydroxyzine.xyz/]atarax 25mg without script[/url] [url=https://valacyclovir.fun/]valtrex 500mg price in india[/url] [url=https://furosemide.site/]furosemide 60 mg tablets[/url] [url=https://zanaflex.live/]zanaflex 4mg capsule price[/url]
WimCounk · August 30, 2022 at 4:36 am
[url=http://propecia.capetown/]buy generic propecia online[/url]
YonCounk · August 30, 2022 at 4:42 am
[url=https://trental.fun/]pentoxifylline trental[/url]
JosephMaict · August 30, 2022 at 4:42 am
[url=https://retinoa.fun/]retino 0.25[/url] [url=https://buyzoloft.guru/]sertraline zoloft[/url] [url=https://cialisltab.quest/]tadalafil 10mg prices uk[/url] [url=https://modafinil.hair/]buy modafinil online mexico[/url] [url=https://prozac.moscow/]prozac prescription online[/url]
SamCounk · August 30, 2022 at 5:02 am
[url=http://ciprofloxacin.cfd/]ciprofloxacin 100mg[/url] [url=http://colchicine.fun/]colchicine price in mexico[/url] [url=http://modafinil.pics/]provigil for sale[/url]
Michaeldrist · August 30, 2022 at 5:20 am
[url=http://augmentin.fun/]augmentin pill[/url]
WimCounk · August 30, 2022 at 5:20 am
[url=http://vpxl.digital/]vpxl pills[/url]
IvyCounk · August 30, 2022 at 6:00 am
[url=http://metformin.trade/]buy metformin us[/url] [url=http://ivermectin.tattoo/]stromectol over the counter[/url]
BooCounk · August 30, 2022 at 6:11 am
[url=https://atomoxetine.cfd/]buy strattera online cheap[/url]
MarkCounk · August 30, 2022 at 6:13 am
[url=https://baclofen.icu/]baclofen 500 mg[/url]
Edgarlor · August 30, 2022 at 6:17 am
[url=http://lopressor.xyz/]lopressor 12.5 mg tablets[/url]
ElwoodGon · August 30, 2022 at 6:29 am
[url=http://buspar.life/]cheapest buspar[/url]
DavisMug · August 30, 2022 at 6:49 am
[url=http://wellbutrin.site/]zyban otc where to buy over the counter[/url]
EvaCounk · August 30, 2022 at 7:01 am
[url=http://valacyclovir.xyz/]valtrex cost generic[/url]
ElwoodGon · August 30, 2022 at 7:06 am
[url=http://vardenafil.download/]levitra generic us[/url]
SueCounk · August 30, 2022 at 7:07 am
[url=http://xenical.fun/]orlistat 120 mg online india[/url]
DenCounk · August 30, 2022 at 7:19 am
[url=https://viagraztab.quest/]buy generic sildenafil in usa[/url]
Michaeldrist · August 30, 2022 at 7:23 am
[url=http://synthroid.business/]synthroid 100 mcg india[/url]
AnnaCounk · August 30, 2022 at 7:28 am
[url=http://onlinedrugstore.run/]all med pharmacy[/url]
RobertFoold · August 30, 2022 at 7:37 am
[url=https://budesonide.sbs/]budesonide price canada[/url]
KimCounk · August 30, 2022 at 7:47 am
[url=https://triamterene.xyz/]triamterene hctz 75-50 mg tab[/url]
RicIsose · August 30, 2022 at 7:59 am
[url=https://methocarbamol.xyz/]robaxin brand name[/url] [url=https://onlinepharmacy.moscow/]prescription free canadian pharmacy[/url] [url=https://buspar.life/]buspar 10 mg tablets[/url] [url=https://zoloft.sbs/]cost of zoloft[/url] [url=https://gabapentin.sbs/]neurontin 600 mg cost[/url] [url=https://accutane.pics/]roaccutane[/url] [url=https://lipitor.fun/]lipitor 10mg india[/url] [url=https://vardenafil.ink/]generic levitra cheap[/url]
Edgarlor · August 30, 2022 at 8:04 am
[url=http://accutane.pics/]generic accutane 40 mg[/url]
DavisMug · August 30, 2022 at 8:10 am
[url=http://buyzoloft.guru/]prices zoloft mexico[/url]
JimCounk · August 30, 2022 at 8:11 am
[url=https://malegra.xyz/]malegra 100 for sale[/url]
PaulCounk · August 30, 2022 at 8:26 am
[url=https://zanaflex.run/]cost tizanidine[/url]
Charlesaduse · August 30, 2022 at 8:27 am
[url=https://budesonide.sbs/]budesonide 100 mcg[/url]
EvaCounk · August 30, 2022 at 8:28 am
[url=http://cialisetab.quest/]tadalafil generic price usa[/url]
RobertFoold · August 30, 2022 at 8:44 am
[url=https://propranolol.fun/]inderal for sale[/url]
ElwoodGon · August 30, 2022 at 8:53 am
[url=http://modafinil.hair/]modafinil australia prescription[/url]
AmyCounk · August 30, 2022 at 9:07 am
[url=http://nexium.fun/]where to buy nexium cheap[/url]
JoeCounk · August 30, 2022 at 9:11 am
[url=https://modafinil.pics/]how to get modafinil in usa[/url] [url=https://furosemide.boutique/]buy furosemide online uk[/url] [url=https://ciprofloxacin.cfd/]1000 mg cipro[/url] [url=https://zestoretic.xyz/]zestoretic 10 mg[/url]
DavisMug · August 30, 2022 at 9:13 am
[url=http://prednisone.moscow/]order prednisone online canada[/url]
RobertFoold · August 30, 2022 at 9:16 am
[url=https://tadacip.works/]tadacip 20 mg price[/url]
RichardFaply · August 30, 2022 at 9:18 am
[url=http://valtrex.run/]valtrex generic online[/url] [url=http://baclofen.site/]3 baclofen[/url] [url=http://buyzoloft.guru/]price of zoloft in australia[/url] [url=http://cialisltab.quest/]best pharmacy prices for cialis[/url]
NickCounk · August 30, 2022 at 9:27 am
[url=http://modafinil.pics/]provigil online uk[/url]
LisaCounk · August 30, 2022 at 9:37 am
[url=https://lyrica.run/]can i buy lyrica online[/url]
Edgarlor · August 30, 2022 at 9:42 am
[url=http://clomid.moscow/]buy online clomid 50mg[/url]
IvyCounk · August 30, 2022 at 9:46 am
[url=http://azithromycin.wtf/]4 azithromycin pills[/url] [url=http://femaleviagra.xyz/]viagra to buy online[/url] [url=http://silagra.life/]buy cheap silagra[/url] [url=http://colchicine.fun/]colchicine tablets buy online[/url] [url=http://amitriptyline.site/]amitriptyline 100[/url] [url=http://ciprofloxacin.cfd/]buy cipro on line[/url] [url=http://levitra.fun/]generic levitra cost[/url] [url=http://erythromycin.fun/]erythromycin price australia[/url]
AnnaCounk · August 30, 2022 at 9:49 am
[url=http://toradol.fun/]toradol otc[/url]
Davidhup · August 30, 2022 at 9:51 am
[url=https://buspar.life/]buspar 30 mg tablet[/url]
Samuelraisk · August 30, 2022 at 9:57 am
[url=http://propecia.lol/]propecia pharmacy[/url]
JosephMaict · August 30, 2022 at 9:57 am
[url=https://prozac.moscow/]best price for generic prozac[/url] [url=https://flomax.life/]buy flomax 4 mg[/url] [url=https://sildenafil.moscow/]rx viagra canada[/url] [url=https://propecia.autos/]propecia prescription australia[/url] [url=https://clomid.moscow/]order clomid canadian[/url] [url=https://cialisltab.quest/]cialis medication cost[/url] [url=https://doxycycline.sbs/]doxycycline brand in india[/url]
Michaelemult · August 30, 2022 at 9:58 am
[url=http://vardenafil.ink/]levitra 10[/url]
KiaCounk · August 30, 2022 at 10:02 am
[url=https://malegra.xyz/]malegra fxt without prescription[/url]
MiclTek · August 30, 2022 at 10:04 am
[url=http://valtrex.run/]cheapest generic valtrex[/url]
Davidhup · August 30, 2022 at 10:10 am
[url=https://anafranil.fun/]where to buy anafranil[/url]
DarrylSef · August 30, 2022 at 10:14 am
[url=http://celebrex.life/]cheap celebrex[/url] [url=http://baclofen.site/]baclofen 25 mg india[/url] [url=http://methocarbamol.xyz/]robaxin 500 cost[/url] [url=http://propecia.autos/]propecia generic best price[/url] [url=http://provigil.cfd/]modafinil online pharmacy usa[/url] [url=http://accutane.pics/]accutane for sale online[/url] [url=http://tadacip.works/]tadacip 10 mg price in india[/url]
RicIsose · August 30, 2022 at 10:14 am
[url=https://cipro.sbs/]cipro ciprofloxacin[/url] [url=https://isotretinoin.life/]accutane cost canada[/url] [url=https://prozac.moscow/]prozac 30 mg tablet[/url]
Michaelemult · August 30, 2022 at 10:15 am
[url=http://augmentin.fun/]amoxicillin capsule 500mg price[/url]
Samuelraisk · August 30, 2022 at 10:17 am
[url=http://prozac.moscow/]fluoxetine 20 mg tablets[/url]
KiaCounk · August 30, 2022 at 10:17 am
[url=https://viagraztab.quest/]where to viagra online[/url]
SamCounk · August 30, 2022 at 10:18 am
[url=http://fildena.site/]fildena 100 free shipping[/url] [url=http://colchicine.fun/]colchicine 500 mg tablets[/url] [url=http://levitra.fun/]levitra price per pill[/url] [url=http://erythromycin.fun/]erythromycin 500mg cost[/url] [url=http://cialisbtabs.monster/]buy cialis online[/url] [url=http://onlinepharmacy.ink/]canadian pharmacy online cialis[/url] [url=http://nexium.fun/]nexium 10 mg capsule[/url]
RodneyTab · August 30, 2022 at 10:20 am
[url=http://budesonide.sbs/]budesonide medicine[/url]
JaneCounk · August 30, 2022 at 10:21 am
[url=http://celexa.site/]citalopram 80 mg cost[/url]
DarrylSef · August 30, 2022 at 10:24 am
[url=http://erectafil.cfd/]buy erectafil 5[/url] [url=http://mebendazole.fun/]vermox canada cost[/url] [url=http://methocarbamol.xyz/]buy robaxin australia[/url] [url=http://anafranil.fun/]anafranil for anxiety[/url] [url=http://tadacip.works/]tadacip cost[/url] [url=http://propranolol.fun/]propranolol brand[/url]
IvyCounk · August 30, 2022 at 10:24 am
[url=http://bactrim.xyz/]buy bactrim online without a prescription[/url] [url=http://modafinil.pics/]modafinil uk prescription[/url] [url=http://cialisbtabs.monster/]generic cialis canada price[/url] [url=http://amitriptyline.fun/]amitriptyline 2.5 mg[/url] [url=http://zoloft.hair/]zoloft 20[/url] [url=http://toradol.fun/]price of toradol[/url] [url=http://onlinepharmacy.ink/]ez pharmacy[/url] [url=http://viagrattab.quest/]viagra brand coupon[/url]
KiaCounk · August 30, 2022 at 10:36 am
[url=https://cialisbtabs.monster/]tadalafil discount[/url]
SueCounk · August 30, 2022 at 10:39 am
[url=http://plavix.fun/]plavix price comparison[/url]
Curtisvibia · August 30, 2022 at 10:50 am
[url=https://mebendazole.fun/]vermox buy[/url]
PaulCounk · August 30, 2022 at 10:50 am
[url=https://bactrim.xyz/]bactrim over the counter uk[/url]
RodneyTab · August 30, 2022 at 10:52 am
[url=http://baclofen.site/]baclofen over the counter uk[/url]
Michaeldrist · August 30, 2022 at 10:55 am
[url=http://synthroid.fun/]price of synthroid 0.125[/url]
MarkCounk · August 30, 2022 at 11:09 am
[url=https://ivermectin.tattoo/]generic ivermectin[/url]
JudyCounk · August 30, 2022 at 11:15 am
[url=http://malegra.xyz/]malegra 200 mg for sale[/url]
AlanCounk · August 30, 2022 at 11:31 am
[url=http://erythromycin.fun/]erythromycin 333 mg tablet[/url] [url=http://cialisetab.quest/]real cialis from canada[/url] [url=http://amitriptyline.site/]amitriptyline 150 mg daily[/url]
BooCounk · August 30, 2022 at 11:38 am
[url=https://buymetformin.works/]metformin tablet price in india[/url]
YonCounk · August 30, 2022 at 11:43 am
[url=https://trimox.site/]amoxicillin price south africa[/url]
LisaCounk · August 30, 2022 at 12:08 pm
[url=https://plavix.fun/]clopidogrel 50 mg[/url]
RichardFaply · August 30, 2022 at 12:12 pm
[url=http://lipitor.fun/]lipitor 20mg[/url] [url=http://augmentin.fun/]cheap amoxil[/url] [url=http://propecia.autos/]buy brand propecia online[/url] [url=http://vardenafil.ink/]buy levitra online australia[/url] [url=http://proscar.fun/]propecia generic australia[/url] [url=http://synthroid.business/]no prescription synthroid[/url] [url=http://retinoa.fun/]retino[/url]
Charlesaduse · August 30, 2022 at 12:32 pm
[url=https://prozac.moscow/]prozac prescription online[/url]
EvaCounk · August 30, 2022 at 12:41 pm
[url=http://amitriptyline.site/]amitriptyline brand name[/url]
RodneyTab · August 30, 2022 at 12:47 pm
[url=http://malegra.life/]buy malegra 100[/url]
SamCounk · August 30, 2022 at 1:06 pm
[url=http://viagrattab.quest/]sildenafil tablets 100mg buy[/url] [url=http://onlinepharmacy.ink/]reputable online pharmacy uk[/url] [url=http://cialisetab.quest/]cialis 20mg sale[/url] [url=http://zanaflex.live/]generic zanaflex cost[/url] [url=http://nexium.fun/]nexium capsules price[/url] [url=http://toradol.fun/]toradol 60 mg[/url] [url=http://strattera.icu/]price of strattera[/url]
Michaeldrist · August 30, 2022 at 1:11 pm
[url=http://cipro.sbs/]ciprofloxacin discount coupon[/url]
JoeCounk · August 30, 2022 at 1:16 pm
[url=https://silagra.life/]canadian pharmacy silagra[/url] [url=https://baclofen.icu/]baclofen tablets 10mg[/url] [url=https://triamterene.xyz/]triamterene 37.5mg hctz 25mg caps[/url] [url=https://valacyclovir.fun/]order valtrex from canada[/url] [url=https://ciprofloxacin.cfd/]cipro uk[/url] [url=https://bactrim.xyz/]bactrim ds generic[/url] [url=https://albuterol.wtf/]buy ventolin without prescription[/url]
JasonCounk · August 30, 2022 at 1:32 pm
[url=https://xenical.fun/]orlistat over the counter uk[/url]
JaneCounk · August 30, 2022 at 1:34 pm
[url=http://modafinil.pics/]provigil 100 mg[/url]
TommyHepsy · August 30, 2022 at 1:43 pm
[url=https://prednisolone.site/]prednisolone brand name india[/url]
Edgarlor · August 30, 2022 at 1:53 pm
[url=http://lexapro.fun/]lexapro brand cost[/url]
ZakCounk · August 30, 2022 at 2:09 pm
[url=https://bactrim.xyz/]bactrim over the counter canada[/url] [url=https://toradol.fun/]toradol[/url]
DavisMug · August 30, 2022 at 2:23 pm
[url=http://prednisolone.site/]generic prednisolone[/url]
JasonCounk · August 30, 2022 at 2:26 pm
[url=https://accutane.business/]canadian pharmacy online accutane[/url]
LisaCounk · August 30, 2022 at 2:28 pm
[url=https://nexium.fun/]nexium otc cost[/url]
SueCounk · August 30, 2022 at 2:37 pm
[url=http://trental.fun/]buy trental uk[/url]
AlanCounk · August 30, 2022 at 2:38 pm
[url=http://trimox.site/]100 amoxicillin 500 mg[/url] [url=http://metformin.trade/]metformin canada pharmacy[/url] [url=http://budesonide.xyz/]budesonide tablets[/url]
RobertFoold · August 30, 2022 at 3:00 pm
[url=https://cialishtabs.monster/]tadalafil 5mg price[/url]
RobertFoold · August 30, 2022 at 3:02 pm
[url=https://provigil.cfd/]where to order modafinil[/url]
JudyCounk · August 30, 2022 at 3:08 pm
[url=http://lyrica.run/]lyrica 150 mg coupon[/url]
SamCounk · August 30, 2022 at 3:14 pm
[url=http://triamterene.xyz/]buy triamterene[/url] [url=http://retinoa.site/]retino a[/url] [url=http://azithromycin.wtf/]azithromycin 500 tablet[/url] [url=http://valacyclovir.fun/]buy valtrex online canada[/url] [url=http://zoloft.hair/]zoloft 50 mg[/url]
MiclTek · August 30, 2022 at 3:17 pm
[url=http://synthroid.business/]synthroid 50[/url]
MichaelGuabe · August 30, 2022 at 3:20 pm
[url=https://anafranil.fun/]anafranil 25 drug[/url]
Curtisvibia · August 30, 2022 at 3:26 pm
[url=https://wellbutrin.site/]generic for wellbutrin xl[/url]
MiclTek · August 30, 2022 at 3:29 pm
[url=http://sildenafil.moscow/]viagra best prices[/url]
CarlCounk · August 30, 2022 at 3:29 pm
[url=http://retinoa.site/]retino 0.5 cream price[/url]
Michaelemult · August 30, 2022 at 3:33 pm
[url=http://cipro.sbs/]ciprofloxacin price canada[/url]
Samuelraisk · August 30, 2022 at 3:38 pm
[url=http://cipro.sbs/]ciprofloxacin 500mg online[/url]
EvaCounk · August 30, 2022 at 3:39 pm
[url=http://amitriptyline.fun/]elavil for interstitial cystitis[/url]
Davidhup · August 30, 2022 at 3:39 pm
[url=https://modafinil.hair/]how to get modafinil[/url]
TommyHepsy · August 30, 2022 at 3:39 pm
[url=https://onlinepharmacy.moscow/]pharmacy online 365[/url]
Estebanguall · August 30, 2022 at 3:40 pm
[url=http://anafranil.fun/]anafranil tablet[/url]
MarkCounk · August 30, 2022 at 3:48 pm
[url=https://trimox.site/]amoxicillin 320 mg[/url]
MarvinZem · August 30, 2022 at 4:00 pm
[url=https://synthroid.fun/]cost of synthroid 100mcg[/url]
Michaelemult · August 30, 2022 at 4:15 pm
[url=http://mebendazole.fun/]vermox otc[/url]
TimothyThive · August 30, 2022 at 4:17 pm
[url=https://synthroid.fun/]lowest prices for synthroid[/url]
Estebanguall · August 30, 2022 at 4:43 pm
[url=http://propecia.autos/]minoxidil propecia[/url]
JoeCounk · August 30, 2022 at 4:49 pm
[url=https://malegra.xyz/]malegra dxt online[/url] [url=https://hydroxyzine.xyz/]atarax 50 mg tablet[/url] [url=https://amitriptyline.site/]amitriptyline 10 no prescription[/url] [url=https://retinoa.site/]retino 0.25 cream[/url] [url=https://nexium.digital/]nexium 40 mg no prescription[/url] [url=https://cialisbtabs.monster/]generic cialis 30 mg[/url] [url=https://trazodone.click/]trazodone prescription cost[/url] [url=https://fildena.site/]buy fildena 100mg[/url]
AshCounk · August 30, 2022 at 4:50 pm
[url=https://trazodone.guru/]buy desyrel online[/url] [url=https://indocin.shop/]indocin in india[/url] [url=https://tretinoin.fun/]tretinoin cream 1mg[/url] [url=https://zithromaxa.online/]can i buy azithromycin over the counter[/url]
ElwoodGon · August 30, 2022 at 4:54 pm
[url=http://baclofen.site/]baclofen tablets[/url]
Estebanguall · August 30, 2022 at 4:54 pm
[url=http://finpecia.life/]propecia best price[/url]
Estebanguall · August 30, 2022 at 4:56 pm
[url=http://provigil.cfd/]where can you buy modafinil[/url]
DarrylSef · August 30, 2022 at 4:57 pm
[url=http://proscar.fun/]how much is propecia in australia[/url] [url=http://diclofenac.life/]diclofenac 25mg buy[/url] [url=http://accutane.pics/]accutane cheapest price[/url] [url=http://valtrex.run/]prescription for valtrex[/url] [url=http://propecia.lol/]propecia generic[/url] [url=http://prozac.moscow/]buy uk generic fluoxetine[/url] [url=http://celebrex.life/]celebrex generic[/url] [url=http://baclofen.site/]baclofen 25[/url]
SueCounk · August 30, 2022 at 4:59 pm
[url=http://accutane.business/]accutane 2.5 mg[/url]
MichaelGuabe · August 30, 2022 at 5:09 pm
[url=https://sildenafil.moscow/]sildenafil brand name in canada[/url]
Edgarlor · August 30, 2022 at 5:20 pm
[url=http://prednisone.moscow/]prednisone prices[/url]
SamCounk · August 30, 2022 at 5:21 pm
[url=http://baclofen.icu/]baclofen 10 mg tablet[/url] [url=http://amitriptyline.site/]endep 25 mg cost[/url] [url=http://metformin.trade/]metformin without a prescriptions online[/url] [url=http://furosemide.site/]furosemide 60 mg tablets[/url] [url=http://ciprofloxacin.cfd/]can i buy ciprofloxacin over the counter uk[/url] [url=http://cialisetab.quest/]tadalafil tablets uk[/url] [url=http://valacyclovir.xyz/]generic for valtrex[/url]
SueCounk · August 30, 2022 at 5:25 pm
[url=http://femaleviagra.xyz/]12.5 mg viagra[/url]
MiclTek · August 30, 2022 at 5:30 pm
[url=http://cialishtabs.monster/]cialis tablets for sale australia[/url]
JudyCounk · August 30, 2022 at 5:31 pm
[url=http://viagragtab.monster/]buy viagra online prescription[/url]
ElwoodGon · August 30, 2022 at 5:35 pm
[url=http://cipro.sbs/]can i buy ciprofloxacin over the counter usa[/url]
Charlesaduse · August 30, 2022 at 5:40 pm
[url=https://buspar.life/]buspar price uk[/url]
WilliamWem · August 30, 2022 at 5:49 pm
[url=https://sildenafil.moscow/]viagra generic cheap[/url] [url=https://erectafil.cfd/]erectafil 5 mg[/url]
UgoCounk · August 30, 2022 at 5:53 pm
[url=http://trazodone.email/]buy trazodone online[/url]
SamCounk · August 30, 2022 at 5:54 pm
[url=http://femaleviagra.xyz/]where can i buy cheap generic viagra online[/url] [url=http://xenical.fun/]buy xenical 120 mg[/url] [url=http://baclofen.icu/]baclofen otc canada[/url] [url=http://zanaflex.live/]tizanidine pills 4 mg[/url] [url=http://celexa.xyz/]celexa best price[/url] [url=http://triamterene.xyz/]triamterene[/url] [url=http://celexa.site/]citalopram sleep[/url] [url=http://plavix.fun/]where to buy clopidogrel[/url]
Samuelraisk · August 30, 2022 at 5:57 pm
[url=http://synthroid.fun/]synthroid online canada[/url]
AnnaCounk · August 30, 2022 at 6:07 pm
[url=http://furosemide.site/]buy furosemide 20 mg[/url]
MichaelDwego · August 30, 2022 at 6:22 pm
[url=https://erectafil.cfd/]erectafil 10[/url]
AlanCounk · August 30, 2022 at 6:29 pm
[url=http://budesonide.xyz/]budesonide prescription[/url] [url=http://trimox.site/]buy amoxil without prescription[/url] [url=http://zanaflex.live/]tizanidine 2mg tablet price in india[/url] [url=http://furosemide.boutique/]how much is furosemide 40 mg[/url] [url=http://celexa.site/]celexa where to buy[/url] [url=http://furosemide.site/]lasix 40 mg daily[/url] [url=http://triamterene.xyz/]triamterene coupon[/url]
WimCounk · August 30, 2022 at 6:33 pm
[url=http://tenormin.works/]medication atenolol 50 mg[/url]
JaneCounk · August 30, 2022 at 6:42 pm
[url=http://hydroxyzine.xyz/]atarax for children[/url]
MichaelDwego · August 30, 2022 at 6:43 pm
[url=https://erectafil.cfd/]erectafil 20 mg price[/url]
Estebanguall · August 30, 2022 at 6:44 pm
[url=http://lexapro.fun/]lexapro 0.5 mg[/url]
Michaeldrist · August 30, 2022 at 6:45 pm
[url=http://cytotec.best/]purchase cytotec online[/url]
JaneCounk · August 30, 2022 at 6:54 pm
[url=http://modafinil.pics/]modafinil tablets india[/url]
ZakCounk · August 30, 2022 at 7:02 pm
[url=https://valacyclovir.fun/]generic valtrex online[/url] [url=https://viagragtab.monster/]viagra without presc uk[/url] [url=https://hydroxyzine.xyz/]atarax 25 mg buy[/url]
ElwoodGon · August 30, 2022 at 7:06 pm
[url=http://buyzoloft.guru/]generic for zoloft[/url]
AlanCounk · August 30, 2022 at 7:12 pm
[url=http://albuterol.wtf/]albuterol ipratropium[/url] [url=http://furosemide.site/]furosemide 20mg tablet cost[/url] [url=http://retinoa.site/]retino 0.05 gel[/url] [url=http://toradol.fun/]toradol 10mg pills[/url]
NickCounk · August 30, 2022 at 7:33 pm
[url=http://furosemide.site/]buy furosimide[/url]
CarlCounk · August 30, 2022 at 7:34 pm
[url=http://amitriptyline.fun/]amitriptyline 25mg cost[/url]
DarrylSef · August 30, 2022 at 7:35 pm
[url=http://lexapro.fun/]cipralex india[/url] [url=http://proscar.fun/]generic propecia online pharmacy[/url] [url=http://retinoa.fun/]retino 0.025 gel[/url] [url=http://anafranil.fun/]anafranil cap 25mg[/url]
KiaCounk · August 30, 2022 at 7:39 pm
[url=https://trimox.site/]augmentin 250mg[/url]
UgoCounk · August 30, 2022 at 7:41 pm
[url=http://aurogra.shop/]aurogra 100 prices[/url]
CarlCounk · August 30, 2022 at 7:43 pm
[url=http://onlinedrugstore.run/]american online pharmacy[/url]
MiclTek · August 30, 2022 at 7:57 pm
[url=http://malegra.life/]buy malegra pills[/url]
JosephMaict · August 30, 2022 at 7:57 pm
[url=https://erectafil.cfd/]erectafil[/url] [url=https://buyzoloft.guru/]zoloft 200[/url] [url=https://synthroid.fun/]synthroid 0.75 mcg[/url] [url=https://flomax.life/]buy flomax without prescription[/url]
DavisMug · August 30, 2022 at 8:31 pm
[url=http://propecia.autos/]canadian pharmacy generic propecia[/url]
RichardFaply · August 30, 2022 at 8:36 pm
[url=http://tadacip.works/]where to buy tadacip online[/url] [url=http://propecia.lol/]finasteride price in india[/url] [url=http://synthroid.fun/]synthroid without a prescription[/url] [url=http://mebendazole.fun/]buy vermox tablets[/url] [url=http://buspar.life/]buspar 40 mg[/url] [url=http://gabapentin.sbs/]how much is neurontin[/url]
YonCounk · August 30, 2022 at 8:38 pm
[url=https://accutane.business/]where can i get accutane cheap[/url]
Estebanguall · August 30, 2022 at 8:45 pm
[url=http://synthroid.business/]synthroid 115 mcg[/url]
Michaelemult · August 30, 2022 at 8:52 pm
[url=http://sildenafil.moscow/]sildenafil tablets online australia[/url]
ElwoodGon · August 30, 2022 at 8:58 pm
[url=http://cytotec.best/]cost of misoprostol tablet[/url]
Samuelraisk · August 30, 2022 at 9:09 pm
[url=http://onlinepharmacy.moscow/]pharmacy order online[/url]
ZakCounk · August 30, 2022 at 9:12 pm
[url=https://xenical.fun/]cheapest xenical online uk[/url] [url=https://amitriptyline.site/]amitriptyline price in india[/url] [url=https://albuterol.wtf/]buy albuterol canada[/url] [url=https://furosemide.site/]buy cheap lasix[/url] [url=https://levitra.fun/]online vardenafil[/url] [url=https://zanaflex.live/]tizanidine 2mg cost[/url] [url=https://nexium.digital/]can you buy nexium over the counter australia[/url] [url=https://cialisbtabs.monster/]over the counter cialis usa[/url]
RichardFaply · August 30, 2022 at 9:13 pm
[url=http://zoloft.sbs/]zoloft 125[/url] [url=http://prednisolone.site/]prednisolone tablets for sale[/url] [url=http://accutane.pics/]buy accutane from india[/url]
ZakCounk · August 30, 2022 at 9:19 pm
[url=https://viagraztab.quest/]how much is viagra 50 mg[/url] [url=https://cialisbtabs.monster/]cialis 5 coupon[/url] [url=https://bactrim.xyz/]cheap bactrim online[/url] [url=https://zestoretic.xyz/]zestoretic price[/url] [url=https://trimox.site/]cheap amoxil online[/url] [url=https://furosemide.site/]lasix online no prescription[/url] [url=https://plavix.fun/]plavix 75mg tablets[/url] [url=https://nexium.fun/]nexium 40 mg price usa[/url]
YonCounk · August 30, 2022 at 9:21 pm
[url=https://modafinil.pics/]where to buy modafinil australia[/url]
ElwoodGon · August 30, 2022 at 9:42 pm
[url=http://lexapro.fun/]lexapro 20 mg prescription[/url]
SueCounk · August 30, 2022 at 9:55 pm
[url=http://albuterol.wtf/]ventolin 2mg tablet[/url]
SueCounk · August 30, 2022 at 9:57 pm
[url=http://cialisbtabs.monster/]generic cialis online[/url]
WilliamWem · August 30, 2022 at 10:07 pm
[url=https://tadacip.works/]tadacip 20 mg tablet[/url] [url=https://doxycycline.sbs/]doxycycline no prescription[/url] [url=https://proscar.fun/]buy generic propecia online[/url]
Samuelraisk · August 30, 2022 at 10:13 pm
[url=http://erectafil.cfd/]erectafil online[/url]
MiclTek · August 30, 2022 at 10:14 pm
[url=http://lopressor.xyz/]lopressor 0.5[/url]
UgoCounk · August 30, 2022 at 10:18 pm
[url=http://avodart2.com/]avodart pharmacy[/url]
Estebanguall · August 30, 2022 at 10:24 pm
[url=http://flomax.life/]flomax for bph[/url]
Michaeldrist · August 30, 2022 at 10:30 pm
[url=http://prednisolone.site/]buy prednisolone 5mg without prescription uk[/url]
MarkCounk · August 30, 2022 at 10:31 pm
[url=https://strattera.icu/]strattera online pharmacy[/url]
MichaelDwego · August 30, 2022 at 10:39 pm
[url=https://vardenafil.download/]how much is levitra tablet[/url]
Davidhup · August 30, 2022 at 10:39 pm
[url=https://cialishtabs.monster/]cheap generic cialis india[/url]
TedCounk · August 30, 2022 at 10:43 pm
[url=https://trental.fun/]trental er[/url]
RicIsose · August 30, 2022 at 10:59 pm
[url=https://propecia.lol/]buy propecia online cheap[/url] [url=https://atomoxetine.fun/]how to buy strattera online[/url] [url=https://viagraltab.monster/]sildenafil buy online india[/url] [url=https://isotretinoin.life/]accutane cheapest price[/url] [url=https://cytotec.best/]buy misoprostol pills[/url] [url=https://vardenafil.ink/]60 mg vardenafil[/url] [url=https://synthroid.wtf/]synthroid 20 mcg[/url] [url=https://cialisltab.quest/]buy cialis online uk[/url]
YonCounk · August 30, 2022 at 11:05 pm
[url=https://viagragtab.monster/]female viagra price india[/url]
AshCounk · August 30, 2022 at 11:10 pm
[url=https://cipro.agency/]how to buy ciprofloxacin[/url] [url=https://drugstore.boutique/]mexico pharmacy order online[/url] [url=https://tretinoin.fun/]retin a buy online usa[/url] [url=https://elavil.boutique/]amitriptyline 10mg price[/url] [url=https://buypillsonline.shop/]minocycline for mrsa[/url]
SamCounk · August 30, 2022 at 11:19 pm
[url=http://fildena.site/]fildena 100 online[/url] [url=http://modafinil.pics/]modafinil pill[/url] [url=http://valacyclovir.fun/]valtrex coupon canada[/url] [url=http://azithromycin.wtf/]zithromax 500mg price in india[/url] [url=http://cialisetab.quest/]cialis australia cost[/url] [url=http://zoloft.durban/]6250 mg zoloft[/url] [url=http://femaleviagra.xyz/]female viagra tablets in india[/url] [url=http://onlinepharmacy.ink/]all in one pharmacy[/url]
JackCounk · August 30, 2022 at 11:25 pm
[url=https://plavix.fun/]clopidogrel 150 mg[/url]
RicIsose · August 30, 2022 at 11:40 pm
[url=https://valtrex.run/]by valtrex online[/url] [url=https://celebrex.life/]celebrex 200mg uk[/url] [url=https://gabapentin.sbs/]neurontin 800mg[/url] [url=https://prozac.moscow/]buy prozac no prescription[/url] [url=https://prednisone.moscow/]prednisone 5mg cost[/url] [url=https://synthroid.fun/]online pharmacy synthroid[/url] [url=https://atomoxetine.fun/]strattera australia[/url] [url=https://propecia.autos/]price of propecia in usa[/url]
SamCounk · August 30, 2022 at 11:49 pm
[url=http://erythromycin.fun/]erythromycin 333[/url] [url=http://plavix.fun/]plavix 300 mg price[/url]
Davidhup · August 30, 2022 at 11:58 pm
[url=https://propecia.lol/]propecia lowest price[/url]
JaneCounk · August 31, 2022 at 12:01 am
[url=http://baclofen.icu/]lioresal online[/url]
Estebanguall · August 31, 2022 at 12:06 am
[url=http://prednisolone.site/]buy prednisolone 5mg tablets uk[/url]
DenCounk · August 31, 2022 at 12:07 am
[url=https://silagra.life/]silagra 100 uk[/url]
DarrylSef · August 31, 2022 at 12:07 am
[url=http://onlinepharmacy.moscow/]pharmacy store[/url] [url=http://cipro.sbs/]cipro for sale online[/url] [url=http://celebrex.life/]buy cheap celebrex[/url] [url=http://baclofen.site/]cost baclofen[/url] [url=http://diclofenac.life/]diclofenac 12.5 mg[/url] [url=http://methocarbamol.xyz/]robaxin otc south africa[/url] [url=http://doxycycline.sbs/]doxycycline prescription canada[/url]
SueCounk · August 31, 2022 at 12:19 am
[url=http://zoloft.durban/]zoloft 75 mg[/url]
IvyCounk · August 31, 2022 at 12:19 am
[url=http://viagraztab.quest/]how can i buy viagra online[/url] [url=http://albuterol.wtf/]albuterol 19 cg[/url] [url=http://viagragtab.monster/]buy viagra via paypal[/url] [url=http://erythromycin.fun/]erythromycin cream india[/url] [url=http://amitriptyline.fun/]buy generic elavil[/url]
JoeCounk · August 31, 2022 at 12:34 am
[url=https://azithromycin.wtf/]zithromax 1g[/url] [url=https://ciprofloxacin.cfd/]order ciprofloxacin 500mg[/url] [url=https://budesonide.xyz/]cost of budesonide capsules[/url] [url=https://malegra.xyz/]malegra 100 mg for sale[/url] [url=https://valacyclovir.xyz/]can i buy valtrex without prescription[/url] [url=https://albuterol.wtf/]ventolin for sale uk[/url]
MiclTek · August 31, 2022 at 12:35 am
[url=http://prednisolone.site/]prednisolone australia[/url]
MarkCounk · August 31, 2022 at 12:35 am
[url=https://onlinepharmacy.ink/]discount pharmacy[/url]
YonCounk · August 31, 2022 at 1:01 am
[url=https://toradol.fun/]toradol 20mg[/url]
AshCounk · August 31, 2022 at 1:13 am
[url=https://lisinopril.works/]lisinopril tablets uk[/url] [url=https://ampicillin.store/]ampicillin 250 mg capsule[/url] [url=https://sildenafila.online/]best viagra pills in india[/url] [url=https://avodart.guru/]avodart 0.5 mg[/url] [url=https://cialisptab.monster/]cialis 5mg best price[/url] [url=https://levothyroxine.fun/]price for 125 mcg synthroid[/url] [url=https://atomoxetine.store/]strattera generic canada cost[/url]
YonCounk · August 31, 2022 at 1:19 am
[url=https://plavix.fun/]buy generic plavix online[/url]
Curtisvibia · August 31, 2022 at 1:36 am
[url=https://retinoa.fun/]retino cream[/url]
MarvinZem · August 31, 2022 at 1:45 am
[url=https://lexapro.fun/]lexapro online uk[/url]
JasonCounk · August 31, 2022 at 1:56 am
[url=https://zestoretic.xyz/]zestoretic medication[/url]
SueCounk · August 31, 2022 at 1:57 am
[url=http://lyrica.run/]lyrica 300 mg buy[/url]
NickCounk · August 31, 2022 at 1:59 am
[url=http://viagraztab.quest/]buy real sildenafil online with paypal[/url]
DarrylSef · August 31, 2022 at 2:00 am
[url=http://lopressor.xyz/]lopressor[/url] [url=http://tadacip.works/]tadacip 20 mg canada[/url]
AnnaCounk · August 31, 2022 at 2:07 am
[url=http://onlinedrugstore.run/]cheapest pharmacy to fill prescriptions with insurance[/url]
SueCounk · August 31, 2022 at 2:11 am
[url=http://malegra.xyz/]malegra 50[/url]
AmyCounk · August 31, 2022 at 2:12 am
[url=http://viagrattab.quest/]i need viagra[/url]
IvyCounk · August 31, 2022 at 2:35 am
[url=http://onlinepharmacy.ink/]canadian pharmacy world[/url] [url=http://colchicine.fun/]colchicine tablets price[/url] [url=http://xenical.fun/]orlistat 120mg capsules uk[/url] [url=http://modafinil.pics/]provigil 200 mg tablet price[/url] [url=http://azithromycin.wtf/]azithromycin 250 mg daily[/url] [url=http://levitra.fun/]buy levitra cheap[/url] [url=http://trazodone.click/]trazodone canada brand name[/url] [url=http://zoloft.hair/]zoloft 100mg[/url]
DarrylSef · August 31, 2022 at 2:48 am
[url=http://gabapentin.sbs/]1600 mg gabapentin[/url] [url=http://buspar.life/]35 buspar[/url] [url=http://celebrex.life/]celebrex 1[/url] [url=http://buyzoloft.guru/]zoloft price generic[/url] [url=http://cialisltab.quest/]online pharmacy cialis 20 mg[/url]
Edgarlor · August 31, 2022 at 2:53 am
[url=http://propecia.lol/]where to buy finasteride[/url]
ElwoodGon · August 31, 2022 at 2:56 am
[url=http://erectafil.cfd/]erectafil 2.5[/url]
TommyHepsy · August 31, 2022 at 3:17 am
[url=https://vardenafil.download/]vardenafil online pharmacy[/url]
RichardFaply · August 31, 2022 at 3:20 am
[url=http://lopressor.xyz/]lopressor 12.5 mg tablets[/url] [url=http://malegra.life/]malegra 100 for sale[/url]
AlanCounk · August 31, 2022 at 3:21 am
[url=http://amitriptyline.site/]how much is amitriptyline[/url] [url=http://ivermectin.tattoo/]stromectol buy[/url] [url=http://fildena.site/]fildena 200mg[/url] [url=http://levitra.fun/]levitra 20mg price[/url] [url=http://colchicine.fun/]colchicine cream[/url] [url=http://nexium.fun/]buy nexium capsules online[/url]
JaneCounk · August 31, 2022 at 3:40 am
[url=http://zestoretic.xyz/]zestoretic coupon[/url]
RichardFaply · August 31, 2022 at 3:47 am
[url=http://propranolol.fun/]inderal 20 mg[/url] [url=http://baclofen.site/]baclofen 75 mg[/url] [url=http://malegra.life/]malegra dxt online[/url] [url=http://erectafil.cfd/]erectafil[/url] [url=http://mebendazole.fun/]vermox cost canada[/url]
MiclTek · August 31, 2022 at 3:48 am
[url=http://budesonide.sbs/]budesonide discount[/url]
ElwoodGon · August 31, 2022 at 3:51 am
[url=http://synthroid.wtf/]synthroid with no prescription[/url]
Michaelemult · August 31, 2022 at 5:08 am
[url=http://buyzoloft.guru/]zoloft price generic[/url]
MiclTek · August 31, 2022 at 5:10 am
[url=http://synthroid.wtf/]synthroid 0.025 mg[/url]
Davidhup · August 31, 2022 at 5:19 am
[url=https://provigil.cfd/]provigil india buy[/url]
IvyCounk · August 31, 2022 at 5:20 am
[url=http://viagraztab.quest/]25 mg viagra price[/url] [url=http://valacyclovir.fun/]order valtrex online[/url]
RicIsose · August 31, 2022 at 5:42 am
[url=https://onlinepharmacy.moscow/]best value pharmacy[/url] [url=https://vardenafil.download/]vardenafil drug[/url] [url=https://cytotec.best/]misoprostol for sale online[/url] [url=https://cialisltab.quest/]5mg cialis[/url] [url=https://cipro.sbs/]ciprofloxacin pill[/url] [url=https://prozac.moscow/]fluoxetine 20mg tablets price[/url] [url=https://prednisolone.site/]can i buy prednisolone over the counter in uk[/url]
IvyCounk · August 31, 2022 at 5:43 am
[url=http://trental.fun/]trental 400 online buy[/url] [url=http://nexium.fun/]how much is over the counter nexium[/url] [url=http://cialisetab.quest/]cialis 20mg tablet[/url]
TommyHepsy · August 31, 2022 at 5:44 am
[url=https://cytotec.best/]cytotec pills buy online[/url]
JaneCounk · August 31, 2022 at 5:57 am
[url=http://silagra.life/]buy silagra tablets[/url]
MichaelGuabe · August 31, 2022 at 5:59 am
[url=https://propecia.autos/]how much is propecia[/url]
NickCounk · August 31, 2022 at 6:03 am
[url=http://amitriptyline.fun/]amitriptyline over the counter usa[/url]
Michaeldrist · August 31, 2022 at 6:07 am
[url=http://tadacip.works/]tadacip 20 mg uk[/url]
LisaCounk · August 31, 2022 at 6:12 am
[url=https://plavix.fun/]plavix cost[/url]
Curtisvibia · August 31, 2022 at 6:18 am
[url=https://mebendazole.fun/]buy vermox online uk[/url]
MaryCounk · August 31, 2022 at 6:45 am
[url=https://celexa.site/]celexa pill[/url] [url=https://onlinepharmacy.ink/]no prescription required pharmacy[/url] [url=https://modafinil.pics/]modafinil uk prescription[/url] [url=https://malegra.xyz/]malegra 200 mg for sale[/url] [url=https://colchicine.fun/]buy colchicine india[/url] [url=https://hydroxyzine.xyz/]buy atarax tablets uk[/url] [url=https://zestoretic.xyz/]zestoretic medication[/url]
RodneyTab · August 31, 2022 at 6:49 am
[url=http://malegra.life/]malegra 50 mg[/url]
DenCounk · August 31, 2022 at 6:54 am
[url=https://valacyclovir.fun/]generic for valtrex buy without a prescription[/url]
Samuelraisk · August 31, 2022 at 6:54 am
[url=http://diclofenac.life/]voltaren gel canada online[/url]
Charlesaduse · August 31, 2022 at 6:57 am
[url=https://cytotec.best/]buy cytotec usa[/url]
Michaelemult · August 31, 2022 at 7:00 am
[url=http://anafranil.fun/]anafranil purchase online[/url]
RodneyTab · August 31, 2022 at 7:35 am
[url=http://propranolol.fun/]propranolol cheap[/url]
Michaelemult · August 31, 2022 at 7:45 am
[url=http://cytotec.best/]where to get misoprostol pills[/url]
JaneCounk · August 31, 2022 at 7:48 am
[url=http://silagra.life/]silagra 100 price[/url]
Samuelraisk · August 31, 2022 at 8:06 am
[url=http://methocarbamol.xyz/]robaxin 250 mg[/url]
JaneCounk · August 31, 2022 at 8:10 am
[url=http://malegra.xyz/]malegra 180 on line[/url]
JaneCounk · August 31, 2022 at 8:11 am
[url=http://levitra.fun/]buy levitra online without prescription[/url]
JosephMaict · August 31, 2022 at 8:22 am
[url=https://sildenafil.moscow/]100mg sildenafil generic[/url] [url=https://methocarbamol.xyz/]robaxin 400 mg[/url] [url=https://valtrex.run/]where to buy valtrex generic[/url]
JaneCounk · August 31, 2022 at 8:24 am
[url=http://zoloft.hair/]online zoloft prescription[/url]
EvaCounk · August 31, 2022 at 8:26 am
[url=http://plavix.fun/]plavix canada price[/url]
JaneCounk · August 31, 2022 at 8:29 am
[url=http://furosemide.site/]furosemide 40 mg tablet[/url]
DarrylSef · August 31, 2022 at 8:32 am
[url=http://flomax.life/]flomax generic online[/url] [url=http://anafranil.fun/]anafranil price in south africa[/url] [url=http://lexapro.fun/]lexapro 5 mg generic[/url] [url=http://baclofen.site/]baclofen cost uk[/url] [url=http://propecia.autos/]propecia medicine price in india[/url] [url=http://lopressor.xyz/]lopressor 10 mg[/url] [url=http://retinoa.fun/]retino a[/url]
MiclTek · August 31, 2022 at 8:35 am
[url=http://cytotec.best/]misoprostol 100 mg[/url]
BooCounk · August 31, 2022 at 8:56 am
[url=https://cytotec.works/]cytotec 2017[/url]
SueCounk · August 31, 2022 at 9:10 am
[url=http://silagra.life/]silagra india[/url]
EyeCounk · August 31, 2022 at 9:31 am
[url=https://hydroxyzine.xyz/]atarax uk prescription[/url] [url=https://viagraztab.quest/]sildenafil 20 mg prescription online[/url] [url=https://silagra.life/]buy silagra 100 mg[/url] [url=https://onlinedrugstore.run/]order pharmacy online egypt[/url] [url=https://amitriptyline.site/]elavil for anxiety[/url] [url=https://ivermectin.tattoo/]buy stromectol uk[/url] [url=https://metformin.trade/]where to buy glucophage in uk[/url]
MiaCounk · August 31, 2022 at 9:31 am
[url=http://triamterene.xyz/]triamterene hctz 37.5[/url]
RichardFaply · August 31, 2022 at 9:46 am
[url=http://celebrex.life/]celebrex 100mg price[/url] [url=http://isotretinoin.life/]accutane uk cost[/url] [url=http://augmentin.fun/]amoxicillin medicine[/url] [url=http://propranolol.fun/]propranolol 30[/url] [url=http://lexapro.fun/]lexapro 2.5[/url] [url=http://vardenafil.ink/]buy levitra australia[/url]
JackCounk · August 31, 2022 at 9:51 am
[url=https://lyrica.run/]lyrica 150 price[/url]
AmyCounk · August 31, 2022 at 9:54 am
[url=http://zestoretic.xyz/]zestoretic[/url]
JackCounk · August 31, 2022 at 9:56 am
[url=https://budesonide.xyz/]budesonide[/url]
RodneyTab · August 31, 2022 at 10:13 am
[url=http://malegra.life/]malegra fxt in india[/url]
Michaeldrist · August 31, 2022 at 10:13 am
[url=http://modafinil.hair/]modafinil online us[/url]
Edgarlor · August 31, 2022 at 10:18 am
[url=http://synthroid.business/]synthroid brand name price[/url]
MaryCounk · August 31, 2022 at 10:21 am
[url=https://accutane.business/]buy accutane uk[/url] [url=https://plavix.fun/]clopidogrel 75 price[/url] [url=https://zestoretic.xyz/]zestoretic 20 25[/url] [url=https://nexium.digital/]nexium 2019[/url] [url=https://zanaflex.live/]503 tizanidine 4 mg[/url] [url=https://colchicine.fun/]colchicine 500 mg tablets[/url] [url=https://lyrica.run/]lyrica 50 mg coupon[/url] [url=https://nexium.fun/]nexium best prices[/url]
EyeCounk · August 31, 2022 at 10:23 am
[url=https://cialisetab.quest/]buy generic cialis paypal[/url] [url=https://onlinedrugstore.run/]us pharmacy no prescription[/url] [url=https://colchicine.fun/]colchicine generic coupon[/url]
ElwoodGon · August 31, 2022 at 10:25 am
[url=http://budesonide.sbs/]budesonide 200 mg[/url]
Jameseloro · August 31, 2022 at 11:01 am
[url=http://propecia.lol/]propecia 84 tablets[/url] [url=http://anafranil.fun/]anafranil 25 drug[/url] [url=http://budesonide.sbs/]over the counter budesonide[/url] [url=http://prednisolone.site/]buying prednisolone online[/url] [url=http://finpecia.life/]propecia online pharmacy[/url]
MarvinZem · August 31, 2022 at 11:18 am
[url=https://modafinil.hair/]cost of modafinil 200mg[/url]
JimCounk · August 31, 2022 at 11:19 am
[url=https://zanaflex.live/]zanaflex 4[/url]
MichaelDwego · August 31, 2022 at 11:23 am
[url=https://retinoa.fun/]retino 05[/url]
MiclTek · August 31, 2022 at 11:31 am
[url=http://doxycycline.sbs/]100 doxycycline[/url]
DavisMug · August 31, 2022 at 11:35 am
[url=http://provigil.cfd/]modafinil 100mg price in india[/url]
JasonCounk · August 31, 2022 at 11:51 am
[url=https://erythromycin.fun/]erythromycin ilosone[/url]
MaryCounk · August 31, 2022 at 11:54 am
[url=https://femaleviagra.xyz/]how to get viagra tablets[/url] [url=https://cialisetab.quest/]cialis generic online india[/url] [url=https://xenical.fun/]orlistat where to buy[/url] [url=https://accutane.business/]generic accutane for sale[/url] [url=https://trimox.site/]amoxicillin order online canada[/url]
TommyHepsy · August 31, 2022 at 11:57 am
[url=https://propecia.lol/]finasteride 0.5[/url]
ElwoodGon · August 31, 2022 at 12:07 pm
[url=http://onlinepharmacy.moscow/]rxpharmacycoupons[/url]
RichardFaply · August 31, 2022 at 12:08 pm
[url=http://vardenafil.download/]levitra price usa[/url] [url=http://budesonide.sbs/]budesonide 0.25 mg[/url] [url=http://buyzoloft.guru/]zoloft pills india[/url] [url=http://proscar.fun/]buy brand name propecia online[/url] [url=http://celebrex.life/]pfizer celebrex[/url] [url=http://finpecia.life/]finpecia online pharmacy[/url]
MichaelDwego · August 31, 2022 at 12:32 pm
[url=https://methocarbamol.xyz/]robaxin in south africa[/url]
TeoCounk · August 31, 2022 at 12:37 pm
[url=https://ivermectin.tattoo/]ivermectin generic[/url]
AmyCounk · August 31, 2022 at 12:38 pm
[url=http://cialisetab.quest/]tadalafil tablet buy online[/url]
SueCounk · August 31, 2022 at 12:44 pm
[url=http://ivermectin.tattoo/]ivermectin pills canada[/url]
AnnaCounk · August 31, 2022 at 12:59 pm
[url=http://colchicine.fun/]colchicine 0.6mg tablets[/url]
MiaCounk · August 31, 2022 at 1:01 pm
[url=http://trental.fun/]trental 400 mg uk[/url]
JudyCounk · August 31, 2022 at 1:07 pm
[url=http://modafinil.pics/]where to buy modafinil[/url]
ZakCounk · August 31, 2022 at 1:08 pm
[url=https://budesonide.xyz/]buy budesonide[/url] [url=https://plavix.fun/]plavix 600 mg[/url] [url=https://fildena.site/]buy fildena 50 mg[/url] [url=https://modafinil.pics/]buy modafinil canada[/url] [url=https://bactrim.xyz/]bactrim ds tablets[/url] [url=https://azithromycin.wtf/]azithromycin medicine india[/url] [url=https://xenical.fun/]orlistat prescription uk[/url] [url=https://onlinedrugstore.run/]mail order pharmacy no prescription[/url]
ElwoodGon · August 31, 2022 at 1:11 pm
[url=http://cialisltab.quest/]cialis canada fast shipping[/url]
JaneCounk · August 31, 2022 at 1:11 pm
[url=http://albuterol.wtf/]combivent inhaler instructions[/url]
CarlCounk · August 31, 2022 at 1:18 pm
[url=http://viagragtab.monster/]how to buy viagra online in india[/url]
MiclTek · August 31, 2022 at 1:20 pm
[url=http://lipitor.fun/]lipitor prices[/url]
JudyCounk · August 31, 2022 at 1:21 pm
[url=http://viagraztab.quest/]rx viagra[/url]
ElwoodGon · August 31, 2022 at 1:24 pm
[url=http://wellbutrin.site/]price of bupropion[/url]
MiaCounk · August 31, 2022 at 1:25 pm
[url=http://valacyclovir.fun/]valtrex generic in mexico[/url]
Michaeldrist · August 31, 2022 at 1:25 pm
[url=http://viagraltab.monster/]australia viagra cost[/url]
LisaCounk · August 31, 2022 at 1:35 pm
[url=https://erythromycin.fun/]erythromycin tablets 500mg price[/url]
DarrylSef · August 31, 2022 at 2:00 pm
[url=http://isotretinoin.life/]accutane tablets uk[/url] [url=http://sildenafil.moscow/]150 mg viagra online[/url] [url=http://prednisone.moscow/]10 mg prednisone tablets[/url] [url=http://clomid.moscow/]clomid pills online uk[/url] [url=http://mebendazole.fun/]can you buy vermox over the counter[/url] [url=http://onlinepharmacy.moscow/]canadian pharmacy 24h com safe[/url] [url=http://vardenafil.ink/]levitra discount[/url]
Edgarlor · August 31, 2022 at 2:04 pm
[url=http://valtrex.run/]valtrex over the counter[/url]
MarvinZem · August 31, 2022 at 2:09 pm
[url=https://buspar.life/]buspirone price[/url]
TimothyThive · August 31, 2022 at 2:18 pm
[url=https://modafinil.hair/]how to get modafinil in canada[/url]
MarvinZem · August 31, 2022 at 2:31 pm
[url=https://finasteride.fun/]buy propecia usa[/url]
CarlCounk · August 31, 2022 at 2:44 pm
[url=http://toradol.fun/]toradol 15 mg[/url]
SueCounk · August 31, 2022 at 2:54 pm
[url=http://zoloft.hair/]zoloft price in india[/url]
AshCounk · August 31, 2022 at 2:56 pm
[url=https://avodarttabs.online/]avodart 0.55 mg[/url] [url=https://antabuse.bond/]antabuse over the counter[/url] [url=https://vermox.site/]vermox tablets buy online[/url] [url=https://prednisolone.boutique/]prednisolone tablet price[/url] [url=https://prazosin365.com/]prazosin pill[/url] [url=https://buyalbuterol.monster/]albuterol prescription coupon[/url] [url=https://buyprednisolone.boutique/]prednisolone 25mg buy online[/url]
BooCounk · August 31, 2022 at 3:12 pm
[url=https://benicar.boutique/]cost of benicar 5 mg[/url]
WilliamWem · August 31, 2022 at 3:14 pm
[url=https://cialishtabs.monster/]10 mg tadalafil daily[/url] [url=https://propecia.lol/]propecia discount pharmacy[/url]
Michaelemult · August 31, 2022 at 3:28 pm
[url=http://doxycycline.sbs/]doxycycline 200 mg capsules[/url]
JackCounk · August 31, 2022 at 3:31 pm
[url=https://valacyclovir.fun/]generic valtrex online[/url]
MarvinZem · August 31, 2022 at 3:37 pm
[url=https://malegra.life/]malegra 120[/url]
DarrylSef · August 31, 2022 at 3:39 pm
[url=http://finpecia.life/]best propecia prices[/url] [url=http://clomid.moscow/]clomid 500mg[/url] [url=http://cytotec.best/]cytotec 200g[/url] [url=http://atomoxetine.fun/]strattera pill generic[/url] [url=http://propecia.autos/]finasteride prostate[/url]
JaneCounk · August 31, 2022 at 3:39 pm
[url=http://azithromycin.wtf/]azithromycin tablets india[/url]
MaryCounk · August 31, 2022 at 3:42 pm
[url=https://furosemide.boutique/]furosemide 20 mg pill[/url] [url=https://azithromycin.wtf/]azithromycin 500 mg tablet price in india[/url] [url=https://xenical.fun/]generic xenical australia[/url] [url=https://baclofen.icu/]baclofen price 10mg in usa[/url] [url=https://furosemide.site/]furosemide tab 40mg[/url] [url=https://viagraztab.quest/]generic sildenafil tablets[/url] [url=https://retinoa.site/]retino[/url] [url=https://onlinedrugstore.run/]northern pharmacy canada[/url]
MichaelDwego · August 31, 2022 at 3:43 pm
[url=https://modafinil.hair/]provigil in mexico[/url]
EvaCounk · August 31, 2022 at 3:48 pm
[url=http://celexa.site/]buy citalopram online uk[/url]
MichaelGuabe · August 31, 2022 at 3:53 pm
[url=https://cipro.sbs/]cipro 250 mg tablets[/url]
Michaeldrist · August 31, 2022 at 4:11 pm
[url=http://synthroid.fun/]synthroid 225 online[/url]
RobertFoold · August 31, 2022 at 4:32 pm
[url=https://synthroid.fun/]synthroid 0.050 mg[/url]
JasonCounk · August 31, 2022 at 4:38 pm
[url=https://celexa.xyz/]cheap celexa online[/url]
AmyCounk · August 31, 2022 at 4:38 pm
[url=http://strattera.icu/]strattera 40[/url]
Jameseloro · August 31, 2022 at 4:49 pm
[url=http://prednisone.moscow/]prednisone medication[/url] [url=http://atomoxetine.fun/]stratera[/url] [url=http://finpecia.life/]propecia 5mg cost[/url]
TedCounk · August 31, 2022 at 5:03 pm
[url=https://cialisetab.quest/]cialis comparison[/url]
RichardFaply · August 31, 2022 at 5:08 pm
[url=http://gabapentin.sbs/]neurontin 200 mg[/url] [url=http://celebrex.life/]can i buy celebrex in canada[/url] [url=http://prozac.moscow/]prozac prescription price[/url] [url=http://wellbutrin.site/]otc bupropion[/url]
IvyCounk · August 31, 2022 at 5:25 pm
[url=http://lyrica.run/]cost of generic lyrica[/url] [url=http://valacyclovir.fun/]valtrex rx[/url] [url=http://zanaflex.run/]zanaflex for migraines[/url] [url=http://levitra.fun/]levitra buy online usa[/url] [url=http://furosemide.site/]lasix 10 mg price[/url] [url=http://ivermectin.tattoo/]stromectol australia[/url] [url=http://plavix.fun/]clopidogrel 75 mg coupon[/url]
RicIsose · August 31, 2022 at 5:27 pm
[url=https://proscar.fun/]propecia price[/url] [url=https://gabapentin.sbs/]neurontin 300 mg tablets[/url] [url=https://synthroid.business/]synthroid 50 mg cost[/url] [url=https://sildenafil.moscow/]where to buy cheap viagra uk[/url] [url=https://valtrex.run/]valtrex generic pill[/url]
YonCounk · August 31, 2022 at 5:28 pm
[url=https://lyrica.run/]lyrica 500[/url]
KimCounk · August 31, 2022 at 5:29 pm
[url=https://plavix.fun/]cost of plavix 75 mg[/url]
JudyCounk · August 31, 2022 at 5:33 pm
[url=http://ivermectin.tattoo/]ivermectin australia[/url]
BooCounk · August 31, 2022 at 5:37 pm
[url=https://acyclovir.directory/]buying acyclovir online[/url]
UgoCounk · August 31, 2022 at 5:39 pm
[url=http://cialisctabs.com/]cialis pills canada[/url]
TedCounk · August 31, 2022 at 5:40 pm
[url=https://budesonide.xyz/]budesonide 9 mg tablets[/url]
RichardFaply · August 31, 2022 at 5:49 pm
[url=http://diclofenac.life/]diclofenac sodium 100mg[/url] [url=http://synthroid.wtf/]synthroid 115 mcg[/url]
TeoCounk · August 31, 2022 at 5:51 pm
[url=https://viagraztab.quest/]order generic viagra from canada[/url]
UgoCounk · August 31, 2022 at 5:52 pm
[url=http://safepharmx.com/]nolvadex for sale canada[/url]
KimCounk · August 31, 2022 at 5:56 pm
[url=https://trazodone.click/]trazodone 150 mg coupon[/url]
AnnaCounk · August 31, 2022 at 6:03 pm
[url=http://furosemide.site/]furosemide 500 mg[/url]
JimCounk · August 31, 2022 at 6:06 pm
[url=https://baclofen.icu/]baclofen 024[/url]
KiaCounk · August 31, 2022 at 6:14 pm
[url=https://zestoretic.xyz/]zestoretic 20 25mg[/url]
AshCounk · August 31, 2022 at 6:14 pm
[url=https://disulfiram.digital/]antabuse online india[/url] [url=https://levaquin.digital/]levaquin buy[/url] [url=https://silagra.shop/]buy silagra[/url] [url=https://clomid.solutions/]how much is clomid[/url] [url=https://tadacip.cfd/]tadacip 20 price in india[/url]
YonCounk · August 31, 2022 at 6:18 pm
[url=https://silagra.life/]silagra 100mg tablets[/url]
Estebanguall · August 31, 2022 at 6:22 pm
[url=http://clomid.moscow/]clomid over the counter australia[/url]
KimCounk · August 31, 2022 at 6:33 pm
[url=https://furosemide.site/]furosemide 20 mg brand name[/url]
RodneyTab · August 31, 2022 at 6:45 pm
[url=http://valtrex.run/]buy generic valtrex cheap[/url]
RichardFaply · August 31, 2022 at 6:59 pm
[url=http://vardenafil.download/]levitra online south africa[/url] [url=http://retinoa.fun/]retino[/url] [url=http://clomid.moscow/]clomid 50 mg order online[/url] [url=http://sildenafil.moscow/]buy generic viagra online in usa[/url] [url=http://accutane.pics/]canadian pharmacy accutane with no prescription[/url] [url=http://prednisone.moscow/]where can i buy prednisone over the counter uk[/url] [url=http://valtrex.run/]valtrex prescription online[/url]
Estebanguall · August 31, 2022 at 6:59 pm
[url=http://retinoa.fun/]retino cream[/url]
Estebanguall · August 31, 2022 at 7:04 pm
[url=http://cialisltab.quest/]canada cialis 20 mg[/url]
Estebanguall · August 31, 2022 at 7:11 pm
[url=http://modafinil.hair/]where to get provigil[/url]
RodneyTab · August 31, 2022 at 7:12 pm
[url=http://synthroid.business/]synthroid 125 mcg tablet[/url]
EyeCounk · August 31, 2022 at 7:24 pm
[url=https://accutane.business/]accutane online canada[/url] [url=https://nexium.digital/]canadian pharmacy nexium 40 mg[/url] [url=https://onlinedrugstore.run/]top online pharmacy[/url] [url=https://budesonide.xyz/]budesonide 5mg[/url] [url=https://valacyclovir.xyz/]valtrex over the counter[/url] [url=https://azithromycin.wtf/]azithromycin 500mg purchase[/url] [url=https://celexa.xyz/]citalopram 20 mg tab[/url] [url=https://malegra.xyz/]buy malegra 100[/url]
JackCounk · August 31, 2022 at 7:25 pm
[url=https://triamterene.xyz/]triamterene capsule[/url]
WimCounk · August 31, 2022 at 7:29 pm
[url=http://buylanoxin.works/]digoxin drug prices[/url]
KiaCounk · August 31, 2022 at 7:29 pm
[url=https://erythromycin.fun/]drug erythromycin 250 mg[/url]
MiaCounk · August 31, 2022 at 7:33 pm
[url=http://azithromycin.wtf/]zithromax price in india[/url]
TimothyThive · August 31, 2022 at 7:49 pm
[url=https://prednisone.moscow/]prednisone 1 mg daily[/url]
TimothyThive · August 31, 2022 at 8:02 pm
[url=https://atomoxetine.fun/]where can i buy strattera online[/url]
Michaelemult · August 31, 2022 at 8:02 pm
[url=http://modafinil.hair/]provigil canada online[/url]
Samuelraisk · August 31, 2022 at 8:12 pm
[url=http://modafinil.hair/]1000 mg modafinil[/url]
DarrylSef · August 31, 2022 at 8:15 pm
[url=http://erectafil.cfd/]erectafil 40[/url] [url=http://modafinil.hair/]modafinil pills online[/url] [url=http://accutane.pics/]buy accutane cheap online[/url] [url=http://cytotec.best/]cytotec 200 mg price[/url] [url=http://valtrex.run/]where can i purchase valtrex[/url] [url=http://prozac.moscow/]buy fluoxetine india[/url]
MiaCounk · August 31, 2022 at 8:22 pm
[url=http://viagrattab.quest/]viagra 50[/url]
DenCounk · August 31, 2022 at 8:24 pm
[url=https://nexium.digital/]nexium generic 40 mg[/url]
AlanCounk · August 31, 2022 at 8:29 pm
[url=http://albuterol.wtf/]albuterol otc usa[/url] [url=http://zoloft.hair/]zoloft 12.5 mg[/url] [url=http://hydroxyzine.xyz/]atarax usa[/url] [url=http://cialisbtabs.monster/]no prescription cialis canada[/url] [url=http://lyrica.run/]lyrica 50 mg price[/url] [url=http://bactrim.xyz/]buy bactrim canada[/url] [url=http://azithromycin.wtf/]zithromax 500mg cost[/url]
AshCounk · August 31, 2022 at 8:31 pm
[url=https://cialisstab.monster/]buy cialis in usa online[/url] [url=https://trazodone.email/]cheap trazodone[/url] [url=https://bupropion.guru/]wellbutrin 150 xl[/url] [url=https://propranolol.shop/]price of propranolol in us[/url] [url=https://acyclovir.solutions/]generic acyclovir tablets[/url] [url=https://ergotamine.monster/]cafergot 100mg[/url]
JasonCounk · August 31, 2022 at 8:36 pm
[url=https://onlinedrugstore.run/]canadapharmacyonline legit[/url]
JasonCounk · August 31, 2022 at 8:39 pm
[url=https://strattera.icu/]cost of strattera in canada[/url]
Edgarlor · August 31, 2022 at 8:44 pm
[url=http://finasteride.fun/]propecia prescription usa[/url]
WilliamWem · August 31, 2022 at 8:45 pm
[url=https://lexapro.fun/]lexapro brand name cost[/url] [url=https://finasteride.fun/]propecia price canada[/url] [url=https://finpecia.life/]propecia online without prescription[/url] [url=https://diclofenac.life/]voltaren gel medication[/url]
Michaeldrist · August 31, 2022 at 8:49 pm
[url=http://synthroid.wtf/]where can i buy synthroid cheap[/url]
RodneyTab · August 31, 2022 at 8:55 pm
[url=http://clomid.moscow/]can i purchase clomid without prescription[/url]
IvyCounk · August 31, 2022 at 8:59 pm
[url=http://valacyclovir.xyz/]valtrex[/url] [url=http://viagraztab.quest/]generic viagra in the usa[/url]
JudyCounk · August 31, 2022 at 9:09 pm
[url=http://zanaflex.live/]tizanidine 4 mg tablet[/url]
AlanCounk · August 31, 2022 at 9:25 pm
[url=http://levitra.fun/]vardenafil 20mg cost[/url] [url=http://cialisbtabs.monster/]buy tadalafil in usa[/url] [url=http://trazodone.click/]trazodone purchase[/url] [url=http://budesonide.xyz/]budesonide generic[/url] [url=http://zestoretic.xyz/]zestoretic price[/url] [url=http://plavix.fun/]plavix coupon[/url] [url=http://xenical.fun/]prescription orlistat[/url]
IvyCounk · August 31, 2022 at 9:27 pm
[url=http://metformin.trade/]metformin er 500 mg[/url] [url=http://xenical.fun/]xenical 120 price in india[/url] [url=http://modafinil.pics/]400mg modafinil[/url] [url=http://zestoretic.xyz/]zestoretic 20 12.5[/url] [url=http://zanaflex.run/]tizanidine 60 mg[/url] [url=http://celexa.xyz/]citalopram nz[/url]
RicIsose · August 31, 2022 at 9:35 pm
[url=https://lexapro.fun/]lexapro[/url] [url=https://budesonide.sbs/]budesonide canadian pharmacy[/url] [url=https://augmentin.fun/]amoxicillin 1000 mg tablets[/url] [url=https://isotretinoin.life/]accutane how to get[/url]
Davidhup · August 31, 2022 at 9:40 pm
[url=https://lexapro.fun/]lexapro generic 20 mg[/url]
TedCounk · August 31, 2022 at 9:46 pm
[url=https://furosemide.site/]buy furosemide online[/url]
NickCounk · August 31, 2022 at 9:47 pm
[url=http://onlinedrugstore.run/]safe online pharmacies in canada[/url]
MichaelGuabe · August 31, 2022 at 9:59 pm
[url=https://propecia.autos/]where can i buy propecia online[/url]
Curtisvibia · August 31, 2022 at 10:28 pm
[url=https://diclofenac.life/]voltaren pharmacy[/url]
WilliamWem · August 31, 2022 at 10:32 pm
[url=https://finasteride.fun/]propecia where to buy uk[/url] [url=https://vardenafil.download/]levitra 10 mg tablet in india[/url] [url=https://onlinepharmacy.moscow/]online pharmacy denmark[/url] [url=https://lexapro.fun/]how to get lexapro[/url] [url=https://valtrex.run/]cheap generic valtrex[/url] [url=https://anafranil.fun/]where to buy anafranil[/url]
MichaelDwego · August 31, 2022 at 10:32 pm
[url=https://budesonide.sbs/]budesonide 3[/url]
TimothyThive · August 31, 2022 at 10:35 pm
[url=https://tadacip.works/]tadacip 40 mg[/url]
TedCounk · August 31, 2022 at 10:37 pm
[url=https://ivermectin.tattoo/]stromectol xr[/url]
PaulCounk · August 31, 2022 at 10:39 pm
[url=https://nexium.digital/]nexium 100 mg[/url]
Jameseloro · August 31, 2022 at 10:46 pm
[url=http://vardenafil.ink/]buy levitra online from canada[/url] [url=http://doxycycline.sbs/]doxycycline 20 mg tablets[/url] [url=http://prednisolone.site/]generic prednisolone otc[/url]
DarrylSef · August 31, 2022 at 10:53 pm
[url=http://diclofenac.life/]voltaren gel purchase[/url] [url=http://retinoa.fun/]retino 05[/url] [url=http://modafinil.hair/]buy modafinil canada pharmacy[/url] [url=http://synthroid.fun/]synthroid 15 mg[/url]
UgoCounk · August 31, 2022 at 10:58 pm
[url=http://lisinopril1.com/]lisinopril 10 mg[/url]
JudyCounk · August 31, 2022 at 11:03 pm
[url=http://metformin.trade/]can you buy glucophage online[/url]
YonCounk · August 31, 2022 at 11:05 pm
[url=https://femaleviagra.xyz/]sildenafil for women[/url]
IvyCounk · August 31, 2022 at 11:09 pm
[url=http://ciprofloxacin.cfd/]ciprofloxacin 500mg coupon[/url] [url=http://lyrica.run/]canadian pharmacy lyrica[/url] [url=http://metformin.trade/]metformin online prescription[/url] [url=http://trimox.site/]amoxicillin 5000 mg[/url] [url=http://silagra.life/]buy silagra 50 mg[/url] [url=http://femaleviagra.xyz/]sildenafil tablet brand name in india[/url]
TimothyThive · August 31, 2022 at 11:09 pm
[url=https://accutane.pics/]accutane price buy[/url]
RichardFaply · August 31, 2022 at 11:14 pm
[url=http://finasteride.fun/]propecia canada online[/url] [url=http://anafranil.fun/]anafranil drug[/url] [url=http://onlinepharmacy.moscow/]cheapest prescription pharmacy[/url]
Estebanguall · August 31, 2022 at 11:18 pm
[url=http://modafinil.hair/]where to buy modafinil usa[/url]
Michaeldrist · August 31, 2022 at 11:56 pm
[url=http://cipro.sbs/]cipro 500mg buy[/url]
DarrylSef · August 31, 2022 at 11:56 pm
[url=http://prozac.moscow/]can you buy prozac over the counter uk[/url] [url=http://modafinil.hair/]buy modafinil[/url] [url=http://propecia.lol/]propecia 1mg tablets[/url] [url=http://zoloft.sbs/]setraline purchase[/url]
TedCounk · September 1, 2022 at 12:06 am
[url=https://celexa.xyz/]cost of brand name celexa[/url]
TeoCounk · September 1, 2022 at 12:32 am
[url=https://modafinil.pics/]modafinil price australia[/url]
RodneyTab · September 1, 2022 at 12:42 am
[url=http://budesonide.sbs/]budesonide brand name australia[/url]
MichaelDwego · September 1, 2022 at 1:13 am
[url=https://prednisolone.site/]prednisolone 5 mg[/url]
NickCounk · September 1, 2022 at 1:23 am
[url=http://trental.fun/]trental 400mg online[/url]
RobertFoold · September 1, 2022 at 1:36 am
[url=https://prednisone.moscow/]predisone with no presciption[/url]
Jameseloro · September 1, 2022 at 1:48 am
[url=http://vardenafil.download/]cheap levitra online[/url] [url=http://methocarbamol.xyz/]robaxin v[/url] [url=http://buyzoloft.guru/]cheapest zoloft online[/url] [url=http://budesonide.sbs/]budesonide tablet brand name[/url] [url=http://diclofenac.life/]diclofenac gel generic uk[/url] [url=http://valtrex.run/]valtrex cost australia[/url] [url=http://doxycycline.sbs/]buy doxycycline 500mg[/url] [url=http://wellbutrin.site/]bupropion generic cost[/url]
MaryCounk · September 1, 2022 at 1:53 am
[url=https://amitriptyline.site/]amitriptyline canada[/url] [url=https://femaleviagra.xyz/]sildenafil 20mg tablet price[/url] [url=https://viagraztab.quest/]viagra capsule price[/url] [url=https://valacyclovir.fun/]valtrex without presciption[/url]
Edgarlor · September 1, 2022 at 2:07 am
[url=http://anafranil.fun/]anafranil weight loss[/url]
NickCounk · September 1, 2022 at 2:16 am
[url=http://budesonide.xyz/]budesonide price in india[/url]
JaneCounk · September 1, 2022 at 2:42 am
[url=http://metformin.trade/]metformin rx[/url]
RicIsose · September 1, 2022 at 2:52 am
[url=https://lexapro.fun/]lexapro[/url] [url=https://buyzoloft.guru/]37.5 mg zoloft[/url] [url=https://prednisone.moscow/]10 mg prednisone daily[/url]
Jameseloro · September 1, 2022 at 3:04 am
[url=http://clomid.moscow/]clomid 0 5 mg[/url] [url=http://cialisltab.quest/]where can i buy cialis over the counter[/url] [url=http://prozac.moscow/]buy fluoxetine 20 mg[/url] [url=http://propecia.autos/]buy propecia in canada[/url]
RichardFaply · September 1, 2022 at 3:07 am
[url=http://synthroid.fun/]buy synthroid[/url] [url=http://malegra.life/]buy malegra 50 mg[/url] [url=http://onlinepharmacy.moscow/]us pharmacy[/url] [url=http://synthroid.wtf/]synthroid 30 mg[/url] [url=http://accutane.pics/]accutane prices[/url] [url=http://budesonide.sbs/]cheap budesonide[/url]
DenCounk · September 1, 2022 at 3:16 am
[url=https://plavix.fun/]plavix 25 mg[/url]
JoeCounk · September 1, 2022 at 3:18 am
[url=https://ciprofloxacin.cfd/]buy cipro online canada[/url] [url=https://amitriptyline.site/]amitriptyline 200 mg[/url] [url=https://viagragtab.monster/]viagra singapore pharmacy[/url] [url=https://retinoa.site/]retino[/url] [url=https://nexium.digital/]nexium otc price comparison[/url] [url=https://xenical.fun/]orlistat capsules[/url]
TedCounk · September 1, 2022 at 3:18 am
[url=https://toradol.fun/]toradol 2017[/url]
AshCounk · September 1, 2022 at 3:27 am
[url=https://buybenicar.works/]cost of generic benicar[/url] [url=https://abilifyaripiprazole.monster/]abilify tablets 5mg[/url] [url=https://modafinil.digital/]modafinil 100mg price in india[/url] [url=https://lasix.wtf/]lasix 40[/url] [url=https://propranolol.agency/]buy generic inderal[/url]
IvyCounk · September 1, 2022 at 3:41 am
[url=http://strattera.icu/]strattera 18 mg coupon[/url] [url=http://valacyclovir.xyz/]valtrex prescription[/url] [url=http://plavix.fun/]plavix 25 mg[/url] [url=http://ivermectin.tattoo/]ivermectin tablet price[/url] [url=http://femaleviagra.xyz/]cheapest sildenafil 100 mg uk[/url] [url=http://onlinedrugstore.run/]online pharmacy bc[/url]
ElwoodGon · September 1, 2022 at 3:48 am
[url=http://lipitor.fun/]lipitor tablets 10mg price[/url]
RichardFaply · September 1, 2022 at 3:53 am
[url=http://sildenafil.moscow/]viagra otc us[/url] [url=http://erectafil.cfd/]erectafil 20 mg[/url] [url=http://baclofen.site/]buy generic baclofen[/url] [url=http://doxycycline.sbs/]buy doxycycline over the counter uk[/url] [url=http://buyzoloft.guru/]zoloft cost without insurance[/url] [url=http://synthroid.wtf/]synthroid 60 mg[/url]
Jameseloro · September 1, 2022 at 3:55 am
[url=http://proscar.fun/]cost of finasteride[/url] [url=http://prozac.moscow/]buy prozac canada[/url]
IvyCounk · September 1, 2022 at 4:14 am
[url=http://erythromycin.fun/]buy erythromycin without prescription[/url] [url=http://retinoa.site/]retino 0.025[/url] [url=http://ivermectin.tattoo/]ivermectin antiviral[/url] [url=http://trimox.site/]amoxicillin 500 mg cost[/url] [url=http://metformin.trade/]where to buy metformin tablets[/url]
MarkCounk · September 1, 2022 at 4:23 am
[url=https://nexium.digital/]nexium otc coupon[/url]
Charlesaduse · September 1, 2022 at 4:34 am
[url=https://propecia.autos/]finasteride tablet online[/url]
ZakCounk · September 1, 2022 at 4:36 am
[url=https://celexa.site/]buy citalopram online usa[/url] [url=https://levitra.fun/]vardenafil price[/url] [url=https://colchicine.fun/]colchicine medicine[/url] [url=https://nexium.fun/]nexium drug brand name[/url] [url=https://toradol.fun/]generic for toradol[/url] [url=https://trimox.site/]amoxicillin 500mg capsule cost[/url] [url=https://silagra.life/]silagra online[/url] [url=https://zanaflex.run/]tizanidine cost[/url]
LisaCounk · September 1, 2022 at 4:43 am
[url=https://erythromycin.fun/]erythromycin 4[/url]
Michaeldrist · September 1, 2022 at 4:47 am
[url=http://accutane.pics/]accutane prices[/url]
MaryCounk · September 1, 2022 at 4:53 am
[url=https://xenical.fun/]cheap xenical pills[/url] [url=https://ciprofloxacin.cfd/]can you buy cipro over the counter in mexico[/url] [url=https://modafinil.pics/]where can i buy provigil[/url] [url=https://accutane.business/]accutane price in canada[/url]
TimothyThive · September 1, 2022 at 4:59 am
[url=https://proscar.fun/]proscar 5[/url]
MiclTek · September 1, 2022 at 5:20 am
[url=http://cytotec.best/]cytotec 200mg pills generic[/url]
TimothyThive · September 1, 2022 at 5:22 am
[url=https://synthroid.fun/]synthroid 0.05 mg[/url]
MichaelDwego · September 1, 2022 at 5:31 am
[url=https://diclofenac.life/]diclofenac 5 cream[/url]
SamCounk · September 1, 2022 at 5:36 am
[url=http://furosemide.boutique/]lasix india[/url] [url=http://trimox.site/]buy amoxicillin 875 mg tablets[/url] [url=http://trental.fun/]trental medicine online[/url] [url=http://metformin.trade/]metformin 500mg canada[/url] [url=http://zanaflex.run/]zanaflex capsule cost[/url]
MarvinZem · September 1, 2022 at 5:56 am
[url=https://prednisone.moscow/]prednisone 54092[/url]
DarrylSef · September 1, 2022 at 6:06 am
[url=http://lipitor.fun/]best price for lipitor[/url] [url=http://synthroid.fun/]where can i buy synthroid[/url] [url=http://accutane.pics/]accutane price without insurance[/url] [url=http://zoloft.sbs/]zoloft 5mg[/url] [url=http://doxycycline.sbs/]doxycycline 40 mg[/url]
JackCounk · September 1, 2022 at 6:20 am
[url=https://furosemide.site/]furosemide 50 mg tablets[/url]
BooCounk · September 1, 2022 at 6:23 am
[url=https://promethazinephenergan.quest/]phenergan 25 mg pill[/url]
AlanCounk · September 1, 2022 at 6:24 am
[url=http://plavix.fun/]plavix price in usa[/url] [url=http://trental.fun/]trental tablet[/url] [url=http://bactrim.xyz/]bactrim uk[/url] [url=http://fildena.site/]fildena 200[/url] [url=http://colchicine.fun/]probenecid colchicine tablets[/url] [url=http://toradol.fun/]toradol tabs[/url] [url=http://trazodone.click/]trazodone 100 tab[/url] [url=http://furosemide.boutique/]lasix 12.5mg cost[/url]
PaulCounk · September 1, 2022 at 6:24 am
[url=https://triamterene.xyz/]triamterene-hctz 37.5-25 mg tb[/url]
DenCounk · September 1, 2022 at 6:31 am
[url=https://retinoa.site/]retino 0.25 cream price[/url]
AshCounk · September 1, 2022 at 6:41 am
[url=https://tizanidine.cfd/]buy tizanidine online[/url] [url=https://seroquel.digital/]seroquel 500[/url] [url=https://synthroid.sale/]cheapest price for synthroid[/url]
Michaeldrist · September 1, 2022 at 6:50 am
[url=http://malegra.life/]malegra fxt[/url]
JimCounk · September 1, 2022 at 6:56 am
[url=https://toradol.fun/]toradol for dogs[/url]
LisaCounk · September 1, 2022 at 7:10 am
[url=https://toradol.fun/]otc toradol[/url]
SueCounk · September 1, 2022 at 7:18 am
[url=http://cialisbtabs.monster/]generic cialis online best price[/url]
MichaelGuabe · September 1, 2022 at 7:24 am
[url=https://lexapro.fun/]lexapro generic cost[/url]
RicIsose · September 1, 2022 at 7:26 am
[url=https://isotretinoin.life/]accutane prescription[/url] [url=https://cialishtabs.monster/]buy tadalafil 20mg uk[/url] [url=https://tadacip.works/]tadacip cipla[/url] [url=https://synthroid.fun/]buy synthroid 0.0125 online[/url] [url=https://proscar.fun/]propecia cost usa[/url] [url=https://accutane.pics/]how to buy accutane[/url]
MichaelDwego · September 1, 2022 at 7:26 am
[url=https://cialisltab.quest/]tadalafil 20mg mexico[/url]
UgoCounk · September 1, 2022 at 7:33 am
[url=http://propranolol.agency/]2.5 mg propranolol[/url]
KiaCounk · September 1, 2022 at 7:35 am
[url=https://ivermectin.tattoo/]stromectol tablets uk[/url]
Samuelraisk · September 1, 2022 at 7:39 am
[url=http://onlinepharmacy.moscow/]no prescription needed pharmacy[/url]
KimCounk · September 1, 2022 at 7:42 am
[url=https://bactrim.xyz/]bactrim 860mg[/url]
Michaelemult · September 1, 2022 at 7:54 am
[url=http://synthroid.business/]synthroid tab 150mcg[/url]
MarvinZem · September 1, 2022 at 8:03 am
[url=https://diclofenac.life/]diclofenac na[/url]
MiclTek · September 1, 2022 at 8:30 am
[url=http://baclofen.site/]buy baclofen in uk[/url]
RicIsose · September 1, 2022 at 8:42 am
[url=https://isotretinoin.life/]where can you get accutane[/url] [url=https://clomid.moscow/]clomid price uk[/url]
JudyCounk · September 1, 2022 at 8:45 am
[url=http://viagrattab.quest/]discount viagra india[/url]
Michaelemult · September 1, 2022 at 8:51 am
[url=http://finpecia.life/]finesterude no prescription[/url]
Curtisvibia · September 1, 2022 at 9:31 am
[url=https://onlinepharmacy.moscow/]pharmacy website[/url]
UgoCounk · September 1, 2022 at 10:00 am
[url=http://elimite.cfd/]elimite cream ebay[/url]
MichaelGuabe · September 1, 2022 at 10:08 am
[url=https://cialisltab.quest/]tadalafil 20 mg best price in india[/url]
LndogoAdobife · September 1, 2022 at 10:10 am
StephenAdobife
https://1xbet-hz11.xyz/
MaryCounk · September 1, 2022 at 10:11 am
[url=https://metformin.trade/]metformin pharmacy coupon[/url] [url=https://onlinedrugstore.run/]reliable canadian pharmacy[/url] [url=https://erythromycin.fun/]erythromycin over the counter uk[/url] [url=https://baclofen.icu/]buy baclofen online[/url] [url=https://malegra.xyz/]malegra 100 cheap[/url]
ElwoodGon · September 1, 2022 at 10:27 am
[url=http://anafranil.fun/]anafranil medicine[/url]
MiaCounk · September 1, 2022 at 10:32 am
[url=http://plavix.fun/]plavix 10mg[/url]
ElwoodGon · September 1, 2022 at 10:47 am
[url=http://diclofenac.life/]diclofenac 100 mg price[/url]
KimCounk · September 1, 2022 at 10:55 am
[url=https://retinoa.site/]retino cream price[/url]
Edgarlor · September 1, 2022 at 10:58 am
[url=http://modafinil.hair/]buy modafinil india[/url]
Samuelraisk · September 1, 2022 at 11:03 am
[url=http://buyzoloft.guru/]zoloft 60 mg[/url]
MiaCounk · September 1, 2022 at 11:06 am
[url=http://accutane.business/]accutane discount[/url]
WimCounk · September 1, 2022 at 11:15 am
[url=http://robaxin.guru/]drug robaxin 500mg[/url]
JimCounk · September 1, 2022 at 11:35 am
[url=https://strattera.icu/]strattera 18 mg price[/url]
UgoCounk · September 1, 2022 at 11:52 am
[url=http://baclofen.fun/]baclofen 20mg[/url]
YonCounk · September 1, 2022 at 11:52 am
[url=https://atarax.click/]atarax generic otc[/url]
MaryCounk · September 1, 2022 at 12:02 pm
[url=https://budesonide.fun/]budesonide 100 mcg[/url] [url=https://isotretinoin.fun/]how much is accutane uk[/url] [url=https://clomid.site/]clomid pills over the counter[/url] [url=https://levothyroxine.site/]synthroid 25 mg daily[/url] [url=https://prozac.capetown/]buy fluoxetine 20 mg online[/url] [url=https://cephalexin.xyz/]keflex tablets 250mg[/url] [url=https://cialisrtab.monster/]tadalafil generic 10mg[/url]
AshCounk · September 1, 2022 at 12:18 pm
[url=https://allopurinol.directory/]allopurinol daily[/url] [url=https://buyfinasteride.monster/]propecia 0.5 daily[/url] [url=https://elimitepermethrin.quest/]buy elimite cream online[/url] [url=https://vardenafila.online/]levitra online from india[/url] [url=https://gabapentin.golf/]medicine neurontin 300 mg[/url]
JudyCounk · September 1, 2022 at 12:32 pm
[url=http://albendazole.sbs/]where can i buy albenza[/url]
RobertFoold · September 1, 2022 at 12:37 pm
[url=https://propecia.moscow/]finpecia 1mg price in india[/url]
Estebanguall · September 1, 2022 at 12:41 pm
[url=https://robaxin.site/]robaxin over the counter canada[/url]
WilliamWem · September 1, 2022 at 12:42 pm
[url=https://bupropion.cfd/]bupropion generic price[/url] [url=https://permethrin.xyz/]elimite 5 cream price[/url] [url=https://metformin.moscow/]metformin price mexico[/url] [url=https://disulfiram.fun/]buy antabuse[/url] [url=https://zoloft.ink/]zoloft without script canada[/url] [url=https://ciprofloxacin.xyz/]can you buy ciprofloxacin over the counter[/url] [url=https://cialisktabs.quest/]where to buy cialis safely[/url] [url=https://albenza.xyz/]albendazole prescription uk[/url]
AnnaCounk · September 1, 2022 at 12:45 pm
[url=http://doxycycline.fun/]buy doxycycline over the counter[/url]
IvyCounk · September 1, 2022 at 1:00 pm
[url=http://gabapentin.xyz/]where can i buy neurontin online[/url] [url=http://clomid.network/]clomid prescription uk[/url]
DavisMug · September 1, 2022 at 1:08 pm
[url=https://neurontin.fun/]neurontin 200 mg capsules[/url]
RichardFaply · September 1, 2022 at 1:18 pm
[url=https://hydroxychloroquine.mom/]plaquenil best price[/url] [url=https://ciprofloxacin.xyz/]buy ciprofloxacin 500[/url] [url=https://bupropion.cfd/]buy zyban australia[/url] [url=https://cialisrtabs.quest/]cost of tadalafil generic[/url]
NickCounk · September 1, 2022 at 1:33 pm
[url=http://dexamethasone.fun/]dexamethasone sale[/url]
JoeCounk · September 1, 2022 at 1:43 pm
[url=https://accutane.site/]generic accutane online[/url] [url=https://clomid.network/]clomid order uk[/url] [url=https://strattera.today/]strattera pills online[/url] [url=https://vardenafil.live/]discount levitra[/url]
DenCounk · September 1, 2022 at 1:50 pm
[url=https://prozac.capetown/]fluoxetine hcl 20 mg[/url]
Michaeldrist · September 1, 2022 at 1:51 pm
[url=http://gabapentin.site/]neurontin brand name in india[/url]
PaulCounk · September 1, 2022 at 1:56 pm
[url=https://prednisone.fun/]prednisone 20mg online pharmacy[/url]
TimothyThive · September 1, 2022 at 2:16 pm
[url=http://neurontin.click/]gabapentin 3 mg[/url]
DavisMug · September 1, 2022 at 2:19 pm
[url=https://zoloft.ink/]buy brand name zoloft[/url]
PaulCounk · September 1, 2022 at 2:25 pm
[url=https://lexapro.today/]lexapro 10 mg pill[/url]
DenCounk · September 1, 2022 at 2:25 pm
[url=https://cialisrtab.monster/]generic cialis safe[/url]
RicIsose · September 1, 2022 at 2:39 pm
[url=http://mebendazole.cfd/]vermox online uk[/url] [url=http://disulfiram.site/]antabuse cost[/url] [url=http://avodart.site/]avodart price[/url] [url=http://bactrim.site/]drug bactrim[/url] [url=http://hydroxychloroquine.download/]plaquenil 500 mg[/url]
Edgarlor · September 1, 2022 at 2:41 pm
[url=https://viagraptab.quest/]how to buy viagra online usa[/url]
ElwoodGon · September 1, 2022 at 2:42 pm
[url=http://biaxin.fun/]biaxin medicine[/url]
Davidhup · September 1, 2022 at 2:55 pm
[url=http://metformin.moscow/]buy metformin 500mg tablets[/url]
JimCounk · September 1, 2022 at 3:02 pm
[url=https://doxycycline.joburg/]buy doxycycline 50 mg[/url]
TimothyThive · September 1, 2022 at 3:04 pm
[url=http://disulfiram.fun/]antabuse price canada[/url]
EvaCounk · September 1, 2022 at 3:17 pm
[url=http://cialisrtab.monster/]how to get real cialis online[/url]
ElwoodGon · September 1, 2022 at 3:22 pm
[url=http://diflucan.fun/]can you purchase diflucan over the counter[/url]
TommyHepsy · September 1, 2022 at 3:25 pm
[url=http://cialisrtabs.quest/]cheap cialis prescription[/url]
JoeCounk · September 1, 2022 at 3:40 pm
[url=https://vardenafil.live/]levitra 10 mg coupon[/url] [url=https://dexamethasone.fun/]dexona tablet price in india[/url] [url=https://ampicillin.life/]ampicillin tablet 500mg[/url] [url=https://onlinedrugstore.digital/]canadian pharmacy online ship to usa[/url] [url=https://cephalexin.xyz/]discount keflex[/url]
JaneCounk · September 1, 2022 at 3:52 pm
[url=http://amoxil.fun/]generic for amoxicillin[/url]
IvyCounk · September 1, 2022 at 4:06 pm
[url=http://cialisitabs.quest/]buy cialis medication[/url] [url=http://escitalopram.cfd/]lexapro 2.5[/url] [url=http://amoxil.fun/]500g amoxicillin[/url] [url=http://doxycycline.fun/]doxycycline medication[/url] [url=http://onlinedrugstore.xyz/]mexican pharmacies online drugs[/url] [url=http://levothyroxine.site/]synthroid 75 mcg cheap no prescription[/url] [url=http://toradol.today/]toradol for headaches[/url] [url=http://viagraftab.quest/]buy viagra canada[/url]
JosephMaict · September 1, 2022 at 4:12 pm
[url=http://disulfiram.site/]buy antabuse in india[/url] [url=http://benicar.site/]benicar generic available[/url] [url=http://hydroxychloroquine.mom/]quineprox 30[/url] [url=http://cialismtabs.monster/]cialis daily pill[/url] [url=http://trazodone.media/]trazodone 50 mg daily[/url] [url=http://diflucan.fun/]diflucan canada coupon[/url]
AlanCounk · September 1, 2022 at 4:36 pm
[url=http://silagra.fun/]silagra 50[/url] [url=http://onlinedrugstore.digital/]legitimate canadian online pharmacies[/url] [url=http://toradol.today/]toradol brand name[/url] [url=http://arimidex.cfd/]arimidex 0.25 mg[/url] [url=http://erectafil.fun/]erectafil 5mg[/url] [url=http://clomid.network/]buy clomid online uk paypal[/url] [url=http://zofran.fun/]zofran 4 mg iv[/url] [url=http://amoxil.fun/]amoxicillin 500 mg prices[/url]
JaneCounk · September 1, 2022 at 4:46 pm
[url=http://azithromycin.business/]azithromycin 200mg tablets[/url]
ElwoodGon · September 1, 2022 at 4:49 pm
[url=http://tizanidine.xyz/]tizanidine for sale[/url]
AlanCounk · September 1, 2022 at 5:01 pm
[url=http://accutane.site/]buy generic accutane 40 mg[/url] [url=http://celecoxib.fun/]celibrax[/url] [url=http://bactrim.icu/]buy bactrim uk[/url]
JaneCounk · September 1, 2022 at 5:30 pm
[url=http://lasix.boutique/]lasix 12.5[/url]
Jameseloro · September 1, 2022 at 5:34 pm
[url=https://ciprofloxacin.xyz/]ciprofloxacin[/url] [url=https://propranolol.life/]buy innopran[/url] [url=https://celebrex.sbs/]200 mg celebrex cost[/url] [url=https://femaleviagra.monster/]buy viagra online australia fast delivery[/url]
Davidhup · September 1, 2022 at 5:46 pm
[url=http://propecia.moscow/]medication finasteride 5mg[/url]
TedCounk · September 1, 2022 at 5:59 pm
[url=https://budesonide.fun/]budesonide canada[/url]
RodneyTab · September 1, 2022 at 6:06 pm
[url=https://diflucan.fun/]diflucan online usa[/url]
BooCounk · September 1, 2022 at 6:12 pm
[url=https://vardenafil.golf/]buy 40 mg levitra[/url]
EyeCounk · September 1, 2022 at 6:14 pm
[url=https://accutane.site/]where can i get accutane online[/url] [url=https://lisinopril.media/]zestoretic canada[/url] [url=https://prednisone.fun/]5 mg prednisone tablets[/url] [url=https://zithromax.site/]azithromycin cheapest price[/url]
SamCounk · September 1, 2022 at 6:27 pm
[url=http://lisinopril.media/]lisinopril tablets uk[/url] [url=http://trimox.xyz/]amoxicillin 500 mg purchase without prescription[/url] [url=http://amoxil.fun/]amoxicillin 775 mg[/url]
IvyCounk · September 1, 2022 at 6:35 pm
[url=http://strattera.click/]order strattera online[/url] [url=http://levothyroxine.site/]price for synthroid 112 mcg[/url] [url=http://tenormin.fun/]tenormin medicine[/url] [url=http://bactrim.icu/]bactrim 80 mg[/url] [url=http://dexamethasone.fun/]dexamethasone generic brand[/url] [url=http://doxycycline.fun/]doxycycline tablets cost[/url] [url=http://lisinopril.media/]lisinopril 10mg tabs[/url] [url=http://vardenafil.live/]buy levitra from india[/url]
AlanCounk · September 1, 2022 at 6:56 pm
[url=http://atarax.click/]atarax 10mg price in india[/url] [url=http://hydroxychloroquine.tech/]plaquenil order online[/url]
BooCounk · September 1, 2022 at 6:59 pm
[url=https://avodart.cfd/]buy generic avodart online[/url]
Curtisvibia · September 1, 2022 at 7:00 pm
[url=https://ciprofloxacin.xyz/]cipro 500mg price in india[/url]
TedCounk · September 1, 2022 at 7:03 pm
[url=https://bupropion.site/]zyban cost uk[/url]
Jameseloro · September 1, 2022 at 7:03 pm
[url=https://benicar.site/]benicar rx[/url] [url=https://metformin.wiki/]metformin tablets where to buy[/url] [url=https://biaxin.fun/]cost of generic biaxin[/url]
MiclTek · September 1, 2022 at 7:13 pm
[url=http://clonidine.fun/]clonidine tablet brand name[/url]
Estebanguall · September 1, 2022 at 7:13 pm
[url=https://azithromycin.ink/]azithromycin online india[/url]
CarlCounk · September 1, 2022 at 7:19 pm
[url=http://bactrim.icu/]where can i buy bactrim online[/url]
UgoCounk · September 1, 2022 at 7:26 pm
[url=http://elimiteacticin.quest/]generic elimite[/url]
JaneCounk · September 1, 2022 at 7:27 pm
[url=http://amoxil.fun/]price of augmentin 500mg[/url]
Edgarlor · September 1, 2022 at 7:47 pm
[url=https://glucophage.life/]buy metformin online no prescription[/url]
DenCounk · September 1, 2022 at 8:05 pm
[url=https://clomid.site/]buy clomid[/url]
JackCounk · September 1, 2022 at 8:23 pm
[url=https://gabapentin.xyz/]3600 mg gabapentin[/url]
EyeCounk · September 1, 2022 at 8:36 pm
[url=https://silagra.xyz/]silagra 50[/url] [url=https://arimidex.cfd/]arimidex cost[/url] [url=https://dexamethasone.fun/]buy dexamethasone australia[/url] [url=https://doxycycline.fun/]doxycycline 300 mg tablet[/url] [url=https://cialisitabs.quest/]discount cialis[/url] [url=https://prozac.capetown/]prozac 40 mg daily[/url] [url=https://budesonide.fun/]budesonide tablets australia[/url]
TeoCounk · September 1, 2022 at 8:52 pm
[url=https://motilium.fun/]motilium for sale[/url]
WilliamWem · September 1, 2022 at 8:57 pm
[url=https://robaxin.site/]can you buy robaxin over the counter[/url] [url=https://vardenafil.life/]generic levitra paypal[/url] [url=https://metformin.wiki/]metformin for sale no prescription[/url] [url=https://allopurinol.site/]allopurinol brand name in canada[/url] [url=https://valtrex.site/]buy valtrex australia[/url] [url=https://avodart.site/]generic for avodart medication[/url]
RichardFaply · September 1, 2022 at 9:00 pm
[url=https://propecia.moscow/]buy propecia uk online[/url] [url=https://duloxetine.xyz/]cymbalta online no prescription[/url] [url=https://duloxetine.cfd/]how much is cymbalta cost[/url]
EyeCounk · September 1, 2022 at 9:11 pm
[url=https://doxycycline.joburg/]doxycycline 75 mg price[/url] [url=https://trimox.xyz/]buy amoxicillin[/url] [url=https://celecoxib.fun/]celebrex coupon[/url] [url=https://zithromax.site/]azithromycin 25 mg[/url] [url=https://clomid.network/]clomid cost uk[/url]
DavisMug · September 1, 2022 at 9:12 pm
[url=https://trazodone.media/]trazodone 150 mg[/url]
Estebanguall · September 1, 2022 at 9:19 pm
[url=https://biaxin.fun/]biaxin online[/url]
JoeCounk · September 1, 2022 at 9:20 pm
[url=https://lexapro.today/]lexapro 30[/url] [url=https://arimidex.cfd/]generic arimidex[/url] [url=https://bactrim.icu/]bactrim tablets[/url] [url=https://doxycycline.joburg/]doxycycline for dogs[/url]
AnnaCounk · September 1, 2022 at 9:23 pm
[url=http://isotretinoin.fun/]accutane 1mg[/url]
MaryCounk · September 1, 2022 at 9:43 pm
[url=https://clomid.site/]clomid 2017[/url] [url=https://doxycycline.joburg/]buy doxycycline 100mg[/url] [url=https://hydroxychloroquine.tech/]hydroxychloroquine 90 mg[/url] [url=https://effexor.life/]effexor 75 mg tablet[/url] [url=https://lasix.boutique/]lasix 200 mg[/url] [url=https://arimidex.cfd/]buying arimidex on line[/url] [url=https://budesonide.fun/]budesonide 3 mg tablet[/url]
NickCounk · September 1, 2022 at 9:55 pm
[url=http://gabapentin.xyz/]price of neurontin[/url]
IvyCounk · September 1, 2022 at 10:04 pm
[url=http://viagraftab.quest/]viagra medicine price[/url] [url=http://amoxicillin.joburg/]amoxicillin 875 price[/url] [url=http://dexamethasone.fun/]dexona[/url]
Samuelraisk · September 1, 2022 at 10:08 pm
[url=https://duloxetine.cfd/]cymbalta prescription[/url]
WilliamWem · September 1, 2022 at 10:12 pm
[url=https://bupropion.cfd/]buy zyban without prescription[/url] [url=https://cialisrtabs.quest/]cheap cialis sale online[/url] [url=https://valtrex.site/]brand name valtrex cost[/url] [url=https://gabapentin.site/]buy gabapentin online no prescription[/url] [url=https://avodart.site/]avodart 0.5 mg cost[/url] [url=https://ciprofloxacin.xyz/]order ciprofloxacin[/url]
EvaCounk · September 1, 2022 at 10:14 pm
[url=http://motilium.fun/]motilium otc[/url]
TeoCounk · September 1, 2022 at 10:20 pm
[url=https://lisinopril.media/]lisinopril tabs 40mg[/url]
AmyCounk · September 1, 2022 at 10:25 pm
[url=http://lexapro.today/]cheap generic lexapro[/url]
UgoCounk · September 1, 2022 at 10:32 pm
[url=http://robaxin.shop/]robaxin 500mg for dogs[/url]
TedCounk · September 1, 2022 at 10:39 pm
[url=https://erectafil.fun/]erectafil 5 mg[/url]
IvyCounk · September 1, 2022 at 10:41 pm
[url=http://arimidex.cfd/]generic for arimidex[/url] [url=http://doxycycline.fun/]best price for prescription doxycycline[/url] [url=http://amoxil.fun/]augmentin xr[/url] [url=http://silagra.xyz/]silagra 100 mg[/url] [url=http://tenormin.fun/]atenolol 12.5 mg daily[/url] [url=http://ampicillin.life/]buy ampicillin 500mg[/url]
WilliamWem · September 1, 2022 at 10:44 pm
[url=https://paxil.site/]paroxetine price[/url] [url=https://metformin.wiki/]metformin 1mg[/url] [url=https://propranolol.life/]propranolol price australia[/url] [url=https://cialisetabs.monster/]cialis nz[/url] [url=https://gabapentin.site/]over the counter neurontin[/url]
MichaelDwego · September 1, 2022 at 10:49 pm
[url=https://femaleviagra.monster/]generic viagra prices in usa[/url]
NickCounk · September 1, 2022 at 11:05 pm
[url=http://bupropion.site/]cost of generic bupropion[/url]
TeoCounk · September 1, 2022 at 11:24 pm
[url=https://effexor.life/]generic effexor xr[/url]
Edgarlor · September 1, 2022 at 11:28 pm
[url=https://duloxetine.xyz/]cymbalta 20 mg canada[/url]
WimCounk · September 1, 2022 at 11:45 pm
[url=http://atrazodone.com/]trazodone hcl 100 mg[/url]
Curtisvibia · September 1, 2022 at 11:56 pm
[url=https://duloxetine.cfd/]medication cymbalta 60 mg[/url]
CarlCounk · September 2, 2022 at 12:09 am
[url=http://prozac.capetown/]generic prozac for sale[/url]
EyeCounk · September 2, 2022 at 12:11 am
[url=https://onlinedrugstore.xyz/]international online pharmacy[/url] [url=https://effexor.life/]buy effexor xr 150mg[/url] [url=https://lasix.boutique/]buying furosemide online[/url] [url=https://zofran.fun/]buy zofran[/url] [url=https://onlinedrugstore.digital/]ez pharmacy[/url]
ElwoodGon · September 2, 2022 at 12:20 am
[url=http://metformin.moscow/]metformin for sale uk[/url]
DavisMug · September 2, 2022 at 12:20 am
[url=https://paxil.site/]buying paroxetine online[/url]
WilliamWem · September 2, 2022 at 12:23 am
[url=https://disulfiram.site/]disulfiram 250 mg[/url] [url=https://metformin.moscow/]metformin generic cost[/url]
AlanCounk · September 2, 2022 at 12:26 am
[url=http://atarax.click/]atarax tablet[/url] [url=http://levothyroxine.site/]synthroid 15mcg[/url] [url=http://amoxil.fun/]where can i buy amoxocillin[/url] [url=http://escitalopram.cfd/]lexapro 20 mg[/url] [url=http://prozac.capetown/]fluoxetine 10 mg cost[/url] [url=http://sildalis.sbs/]canadian pharmacy sildalis[/url]
MichaelDwego · September 2, 2022 at 12:38 am
[url=https://paxil.site/]paroxetine uk[/url]
IvyCounk · September 2, 2022 at 12:40 am
[url=http://bactrim.icu/]bactrim tablets uk[/url] [url=http://silagra.xyz/]silagra 100 mg india[/url] [url=http://accutane.site/]accutane price uk[/url] [url=http://isotretinoin.fun/]accutane[/url]
EyeCounk · September 2, 2022 at 12:41 am
[url=https://bupropion.site/]wellbutrin 150mg price[/url] [url=https://doxycycline.joburg/]cheapest doxycycline 100mg[/url] [url=https://clomid.site/]clomid online pharmacy uk[/url] [url=https://albendazole.sbs/]albendazole cost in canada[/url] [url=https://onlinedrugstore.fun/]capsule online pharmacy[/url] [url=https://zithromax.site/]where can i buy azithromycin over the counter nz[/url]
KiaCounk · September 2, 2022 at 12:53 am
[url=https://escitalopram.cfd/]lexapro 10 mg price australia[/url]
ElwoodGon · September 2, 2022 at 1:05 am
[url=http://permethrin.xyz/]where can you get elimite[/url]
Michaelemult · September 2, 2022 at 1:07 am
[url=https://cialisktabs.quest/]buy cialis online australia[/url]
Michaeldrist · September 2, 2022 at 1:08 am
[url=http://clonidine.fun/]clonidine 0.15 mg[/url]
YonCounk · September 2, 2022 at 1:08 am
[url=https://arimidex.cfd/]arimidex 1 mg tablets[/url]
DavisMug · September 2, 2022 at 1:09 am
[url=https://cialisktabs.quest/]online pharmacy cialis 20 mg[/url]
AmyCounk · September 2, 2022 at 1:14 am
[url=http://azithromycin.business/]zithromax for sale 500 mg[/url]
AmyCounk · September 2, 2022 at 1:26 am
[url=http://lexapro.today/]lexapro price australia[/url]
Edgarlor · September 2, 2022 at 1:35 am
[url=https://zoloft.ink/]400 mg zoloft[/url]
AmyCounk · September 2, 2022 at 1:50 am
[url=http://lisinopril.media/]lisinopril 20mg for sale[/url]
ZakCounk · September 2, 2022 at 1:55 am
[url=https://prednisone.fun/]where can i buy prednisone online uk[/url] [url=https://erectafil.fun/]erectafil 5mg[/url] [url=https://amoxicillin.joburg/]buy amoxicillin from mexico online[/url] [url=https://zofran.fun/]zofran 4 mg iv[/url] [url=https://strattera.today/]strattera no prescription[/url]
MiclTek · September 2, 2022 at 2:13 am
[url=http://disulfiram.site/]where can i buy antabuse[/url]
MichaelGuabe · September 2, 2022 at 2:22 am
[url=http://viagraetab.quest/]where can i get viagra in australia[/url]
DarrylSef · September 2, 2022 at 2:35 am
[url=http://diflucan.fun/]diflucan medicine buy[/url] [url=http://robaxin.site/]methocarbamol robaxin 500mg[/url] [url=http://hydroxychloroquine.download/]quineprox kratom chloroquine[/url] [url=http://wellbutrin.fun/]bupropion 150 mg[/url] [url=http://neurontin.fun/]buy gabapentin canada[/url]
ElwoodGon · September 2, 2022 at 2:39 am
[url=http://cialisrtabs.quest/]tadalafil india 10 mg[/url]
IvyCounk · September 2, 2022 at 2:42 am
[url=http://accutane.site/]accutane 5 mg online[/url] [url=http://lisinopril.media/]40 mg lisinopril[/url] [url=http://budesonide.fun/]budesonide medication[/url] [url=http://anafranil.site/]anafranil 25 mg capsule[/url] [url=http://clomid.site/]average price of clomid[/url] [url=http://silagra.fun/]silagra 11[/url] [url=http://dexamethasone.fun/]dexamethasone capsule[/url] [url=http://silagra.xyz/]buy silagra online in india[/url]
MarvinZem · September 2, 2022 at 3:09 am
[url=http://vardenafil.life/]vardenafil 20mg[/url]
IvyCounk · September 2, 2022 at 3:10 am
[url=http://amoxil.fun/]augmentin 375[/url] [url=http://onlinedrugstore.digital/]reddit canadian pharmacy[/url] [url=http://vardenafil.live/]how to buy levitra[/url] [url=http://zofran.fun/]zofran otc price[/url] [url=http://cephalexin.xyz/]cephalexin uk[/url] [url=http://ampicillin.life/]ampicillin 1000 mg[/url]
ElwoodGon · September 2, 2022 at 3:29 am
[url=http://femaleviagra.monster/]prescription viagra online usa[/url]
SamCounk · September 2, 2022 at 3:32 am
[url=http://zofran.fun/]zofran over the counter australia[/url] [url=http://hydroxychloroquine.tech/]hydroxychloroquine sulfate[/url] [url=http://lisinopril.media/]zestril 5mg price in india[/url] [url=http://cephalexin.xyz/]medication keflex 500 mg[/url] [url=http://lexapro.today/]10mcg lexapro[/url] [url=http://trimox.xyz/]amoxicillin generic price in india[/url]
ElwoodGon · September 2, 2022 at 3:43 am
[url=http://permethrin.xyz/]buy elimite cream[/url]
Charlesaduse · September 2, 2022 at 3:44 am
[url=http://hydroxychloroquine.mom/]plaquenil 100 mg[/url]
JasonCounk · September 2, 2022 at 3:46 am
[url=https://cialisitabs.quest/]cialis in usa[/url]
BooCounk · September 2, 2022 at 3:59 am
[url=https://vermox.works/]where can i buy vermox medication online[/url]
CarlCounk · September 2, 2022 at 4:01 am
[url=http://arimidex.cfd/]prescription arimidex[/url]
MaryCounk · September 2, 2022 at 4:02 am
[url=https://onlinedrugstore.digital/]professional pharmacy[/url] [url=https://azithromycin.business/]zithromax antibiotic[/url]
Charlesaduse · September 2, 2022 at 4:09 am
[url=http://albenza.xyz/]albendazole online[/url]
TimothyThive · September 2, 2022 at 4:13 am
[url=http://cialisrtabs.quest/]cialis in mexico online[/url]
WimCounk · September 2, 2022 at 4:24 am
[url=http://cialisktab.monster/]cialis tablets purchase[/url]
DarrylSef · September 2, 2022 at 4:35 am
[url=http://viagraetab.quest/]sildenafil 100 mg prescription[/url] [url=http://metformin.wiki/]metformin hcl 500 mg[/url] [url=http://mebendazole.xyz/]can you buy vermox over the counter[/url] [url=http://celebrex.sbs/]celebrex price usa[/url] [url=http://cialisrtabs.quest/]cialis purchase online[/url] [url=http://robaxin.site/]robaxin 500mg otc[/url]
DarrylSef · September 2, 2022 at 4:52 am
[url=http://cialismtabs.monster/]purchase cialis online canada[/url] [url=http://sildenafil.ink/]how to buy viagra in mexico[/url] [url=http://hydroxychloroquine.mom/]order plaquenil[/url] [url=http://bactrim.site/]how to get bactrim[/url] [url=http://disulfiram.site/]disulfiram generic[/url] [url=http://ciprofloxacin.xyz/]ciprofloxacin online prescription[/url] [url=http://celebrex.sbs/]celebrex 200 mg coupon[/url]
TeoCounk · September 2, 2022 at 4:55 am
[url=https://onlinedrugstore.xyz/]canadian pharmacy no rx needed[/url]
Jameseloro · September 2, 2022 at 5:00 am
[url=https://paxil.site/]paxil 37.5 mg[/url] [url=https://permethrin.xyz/]elimite cream over the counter[/url]
Michaeldrist · September 2, 2022 at 5:15 am
[url=http://diflucan.fun/]where can you get diflucan over the counter[/url]
JackCounk · September 2, 2022 at 5:28 am
[url=https://silagra.xyz/]silagra 100mg tablets[/url]
ZakCounk · September 2, 2022 at 5:28 am
[url=https://silagra.xyz/]silagra 100 mg tablet[/url] [url=https://onlinedrugstore.fun/]escrow pharmacy canada[/url] [url=https://lisinopril.media/]lisinopril online canadian pharmacy[/url] [url=https://accutane.site/]roaccutane buy[/url] [url=https://erectafil.fun/]erectafil 2.5[/url] [url=https://onlinedrugstore.xyz/]online pharmacy for sale[/url] [url=https://atarax.click/]atarax price uk[/url] [url=https://dexamethasone.fun/]dexamethasone 0.25 mg[/url]
YonCounk · September 2, 2022 at 5:30 am
[url=https://budesonide.fun/]budesonide 32 mcg[/url]
JackCounk · September 2, 2022 at 5:30 am
[url=https://arimidex.cfd/]arimidex australia online[/url]
KiaCounk · September 2, 2022 at 5:41 am
[url=https://cephalexin.xyz/]price for cephalexin 500mg[/url]
AlanCounk · September 2, 2022 at 5:41 am
[url=http://bupropion.site/]wellbutrin pills[/url] [url=http://azithromycin.business/]azithromycin 1[/url] [url=http://gabapentin.xyz/]neurontin 3[/url] [url=http://sildalis.sbs/]sildalis india[/url]
DenCounk · September 2, 2022 at 6:01 am
[url=https://zofran.fun/]zofran generic pill[/url]
Charlesaduse · September 2, 2022 at 6:07 am
[url=http://propecia.moscow/]propecia cheapest price[/url]
RodneyTab · September 2, 2022 at 6:29 am
[url=https://disulfiram.fun/]buy disulfiram online[/url]
Michaelemult · September 2, 2022 at 6:39 am
[url=https://femaleviagra.monster/]sildenafil 48 tabs 50 mg price[/url]
AshCounk · September 2, 2022 at 6:42 am
[url=https://cialisstab.monster/]cialis medicine price[/url] [url=https://levaquin.digital/]buy levaquin[/url] [url=https://buyproscar.store/]buy cheap proscar online[/url] [url=https://strattera.life/]strattera 25[/url] [url=https://diflucan.directory/]diflucan cost canada[/url] [url=https://tetracycline.fun/]tetracyclinbe[/url] [url=https://retinatretinoincream.com/]buy retin a online canada[/url] [url=https://amoxicillin.business/]amoxicillin 509 mg[/url]
IvyCounk · September 2, 2022 at 6:57 am
[url=http://doxycycline.fun/]doxycycline antimalarial[/url] [url=http://toradol.today/]toradol india[/url] [url=http://strattera.today/]240 mg strattera[/url] [url=http://silagra.fun/]silagra 100 mg tablet[/url] [url=http://zithromax.site/]azithromycin in canada[/url] [url=http://hydroxychloroquine.tech/]hydroxychloroquine 400[/url]
MichaelDwego · September 2, 2022 at 7:10 am
[url=https://zoloft.ink/]zoloft 2018[/url]
AmyCounk · September 2, 2022 at 7:11 am
[url=http://strattera.click/]strattera price south africa[/url]
SueCounk · September 2, 2022 at 7:16 am
[url=http://cialisrtab.monster/]cialis 5mg over the counter[/url]
LisaCounk · September 2, 2022 at 7:19 am
[url=https://zithromax.site/]azithromycin brand name uk[/url]
RobertFoold · September 2, 2022 at 7:19 am
[url=https://benicar.site/]benicar brand name[/url]
JosephMaict · September 2, 2022 at 7:21 am
[url=http://metformin.wiki/]metformin 150[/url] [url=http://valtrex.site/]price of valtrex without insurance[/url] [url=http://cialisrtabs.quest/]generic tadalafil in canada[/url] [url=http://zithromax.fun/]azithromycin lowest price[/url] [url=http://wellbutrin.fun/]bupropion hydrochloride[/url] [url=http://azithromycin.ink/]zithromax canadian pharmacy[/url]
Edgarlor · September 2, 2022 at 7:24 am
[url=https://tizanidine.xyz/]zanaflex canada[/url]
ZakCounk · September 2, 2022 at 7:29 am
[url=https://budesonide.fun/]budesonide 25 mg[/url] [url=https://gabapentin.xyz/]gabapentin 50 mg[/url] [url=https://toradol.today/]toradol drug[/url] [url=https://prozac.capetown/]fluoxetine brand name[/url] [url=https://trimox.xyz/]buying amoxicillin online uk[/url]
JoeCounk · September 2, 2022 at 8:04 am
[url=https://levothyroxine.site/]synthroid 137 mcg price[/url] [url=https://bactrim.icu/]order bactrim[/url] [url=https://isotretinoin.fun/]buy generic accutane online[/url] [url=https://atarax.click/]50 mg atarax[/url]
WimCounk · September 2, 2022 at 8:08 am
[url=http://suhagra.agency/]buy suhagra 50 mg[/url]
Davidhup · September 2, 2022 at 8:27 am
[url=http://lexapro.sbs/]lexapro 10mg tablet[/url]
KiaCounk · September 2, 2022 at 8:32 am
[url=https://viagraftab.quest/]viaga[/url]
MiclTek · September 2, 2022 at 8:33 am
[url=http://valtrex.site/]valtrex 400 mg[/url]
Samuelraisk · September 2, 2022 at 8:37 am
[url=https://lexapro.sbs/]lexapro tablets[/url]
TeoCounk · September 2, 2022 at 8:38 am
[url=https://anafranil.site/]best price for generic anafranil 25mg in canada[/url]
DavisMug · September 2, 2022 at 8:39 am
[url=https://hydroxychloroquine.download/]hydroxychloroquine 300 mg[/url]
JosephMaict · September 2, 2022 at 8:43 am
[url=http://albenza.xyz/]albendazole tablets cost in india[/url] [url=http://ciprofloxacin.xyz/]cipro xr[/url] [url=http://hydroxychloroquine.download/]hydroxychloroquine 90[/url] [url=http://clonidine.fun/]can you buy clonidine online[/url] [url=http://wellbutrin.fun/]bupropion hcl sr[/url] [url=http://cialisktabs.quest/]cialis buy online india[/url] [url=http://diflucan.fun/]cost of diflucan prescription in mexico[/url] [url=http://mebendazole.cfd/]buy vermox uk[/url]
Curtisvibia · September 2, 2022 at 8:45 am
[url=https://tadacip.fun/]canadian tadacip[/url]
WimCounk · September 2, 2022 at 8:47 am
[url=http://amoxicillin.company/]amoxil for sale[/url]
SueCounk · September 2, 2022 at 8:49 am
[url=http://escitalopram.cfd/]lexapro 15mg tablet[/url]
TommyHepsy · September 2, 2022 at 9:03 am
[url=http://cialisrtabs.quest/]cialis daily cost[/url]
Edgarlor · September 2, 2022 at 9:05 am
[url=https://azithromycin.ink/]buy azithromycin 500[/url]
RichardFaply · September 2, 2022 at 9:13 am
[url=https://benicar.site/]benicar 5 mg coupon[/url] [url=https://propecia.moscow/]propesia[/url] [url=https://cialisktabs.quest/]price of tadalafil 20mg[/url] [url=https://viagraptab.quest/]viagra pills for sale online[/url] [url=https://propranolol.life/]propranolol pills online[/url]
ZakCounk · September 2, 2022 at 9:35 am
[url=https://vardenafil.live/]levitra for sale online[/url] [url=https://celecoxib.fun/]celebrex 100mg price[/url] [url=https://onlinedrugstore.digital/]escrow pharmacy online[/url] [url=https://albendazole.sbs/]albendazole drug[/url] [url=https://effexor.life/]effexor 20 mg[/url] [url=https://erectafil.fun/]erectafil 5mg[/url]
Estebanguall · September 2, 2022 at 9:47 am
[url=https://mebendazole.xyz/]vermox us[/url]
JudyCounk · September 2, 2022 at 9:56 am
[url=http://zithromax.site/]where can i buy azithromycin 500mg over the counter[/url]
Michaelemult · September 2, 2022 at 10:12 am
[url=https://azithromycin.ink/]azithromycin 40 mg[/url]
JoeCounk · September 2, 2022 at 10:20 am
[url=https://onlinedrugstore.fun/]canadian pharmacy 365[/url] [url=https://celecoxib.fun/]celebrex tablets australia[/url] [url=https://zithromax.site/]zithromax prescription[/url] [url=https://doxycycline.fun/]doxycycline 500mg capsules[/url] [url=https://vardenafil.live/]where to order levitra online[/url] [url=https://silagra.xyz/]silagra without prescription[/url] [url=https://arimidex.cfd/]arimidex for sale uk[/url] [url=https://onlinedrugstore.xyz/]mexico pharmacy order online[/url]
IvyCounk · September 2, 2022 at 10:20 am
[url=http://budesonide.fun/]budecort usa[/url] [url=http://prozac.capetown/]prozac where to buy[/url] [url=http://zithromax.site/]azithromycin 250 mg over the counter[/url] [url=http://azithromycin.business/]azithromycin otc in us[/url] [url=http://albendazole.sbs/]albendazole 400 mg pills[/url]
MaryCounk · September 2, 2022 at 10:27 am
[url=https://budesonide.fun/]budesonide discount[/url] [url=https://anafranil.site/]anafranil canada[/url]
TeoCounk · September 2, 2022 at 10:29 am
[url=https://escitalopram.cfd/]best price for lexapro generic[/url]
PaulCounk · September 2, 2022 at 10:36 am
[url=https://amoxil.fun/]amoxicillin 250 mg tablet price[/url]
RicIsose · September 2, 2022 at 10:39 am
[url=http://azithromycin.ink/]azithromycin capsules 500mg[/url] [url=http://sildenafil.ink/]sildenafil canada cost[/url] [url=http://neurontin.fun/]gabapentin brand name australia[/url] [url=http://femaleviagra.monster/]best female viagra over the counter[/url] [url=http://chloroquine.fun/]chloroquine covid19[/url]
ZakCounk · September 2, 2022 at 10:42 am
[url=https://prednisone.fun/]prednisone without prescription[/url] [url=https://budesonide.fun/]budesonide 25 mg[/url] [url=https://effexor.life/]effexor tablets 75mg[/url] [url=https://albendazole.sbs/]albendazole tablets[/url] [url=https://trimox.xyz/]amoxil for sale[/url] [url=https://erectafil.fun/]buy erectafil 20[/url] [url=https://levothyroxine.site/]synthroid 0.05mg cost[/url] [url=https://lexapro.today/]lexapro 5mg price[/url]
Michaelemult · September 2, 2022 at 10:43 am
[url=https://avodart.site/]avodart capsules 0.5 mg[/url]
DenCounk · September 2, 2022 at 10:43 am
[url=https://lexapro.today/]generic for cipralex[/url]
JimCounk · September 2, 2022 at 10:54 am
[url=https://onlinedrugstore.xyz/]online pharmacy delivery[/url]
MiclTek · September 2, 2022 at 11:04 am
[url=http://viagraetab.quest/]cheap sildenafil 100mg[/url]
AmyCounk · September 2, 2022 at 11:07 am
[url=http://strattera.today/]strattera 25[/url]
AmyCounk · September 2, 2022 at 11:10 am
[url=http://cialisrtab.monster/]tadalafil prescription[/url]
Charlesaduse · September 2, 2022 at 11:17 am
[url=http://benicar.site/]benicar hct generic[/url]
MaryCounk · September 2, 2022 at 11:20 am
[url=https://albendazole.sbs/]albendazole prescription[/url] [url=https://ampicillin.life/]price ampicillin[/url] [url=https://doxycycline.fun/]doxycycline 100 mg forsale outside the us[/url]
EyeCounk · September 2, 2022 at 11:23 am
[url=https://lisinopril.media/]lisinopril 40 mg[/url] [url=https://cialisitabs.quest/]how to order cialis from india[/url]
BooCounk · September 2, 2022 at 11:26 am
[url=https://clonidine.shop/]clonidine hcl 0.1 mg tablets[/url]
TimothyThive · September 2, 2022 at 11:35 am
[url=http://benicar.site/]buy benicar online cheap[/url]
AlanCounk · September 2, 2022 at 11:59 am
[url=http://tenormin.fun/]atenolol 50 price[/url] [url=http://cephalexin.xyz/]cephalexin online canada[/url] [url=http://albendazole.sbs/]albendazole albenza[/url] [url=http://bactrim.icu/]80 mg bactrim[/url] [url=http://budesonide.fun/]budesonide 0.5 mg[/url] [url=http://lasix.boutique/]buy lasix without a prescription[/url] [url=http://cialisitabs.quest/]buy tadalafil 10mg[/url]
LisaCounk · September 2, 2022 at 12:03 pm
[url=https://onlinedrugstore.xyz/]canadian pharmacy in canada[/url]
NickCounk · September 2, 2022 at 12:43 pm
[url=http://onlinedrugstore.xyz/]no rx pharmacy[/url]
TimothyThive · September 2, 2022 at 12:44 pm
[url=http://glucophage.life/]buy metformin[/url]
ZakCounk · September 2, 2022 at 12:55 pm
[url=https://strattera.today/]strattera brand name coupon[/url] [url=https://onlinedrugstore.fun/]pharmacy website india[/url] [url=https://onlinedrugstore.digital/]canadian prescription pharmacy[/url] [url=https://levothyroxine.site/]synthroid 0.075 mg[/url] [url=https://zithromax.site/]buy zithromax canada[/url] [url=https://strattera.click/]strattera 60 mg coupon[/url]
RicIsose · September 2, 2022 at 1:04 pm
[url=http://celebrex.sbs/]celebrex 100mg price[/url] [url=http://duloxetine.xyz/]purchase cymbalta[/url] [url=http://viagraetab.quest/]buy cheap viagra online canada[/url] [url=http://trazodone.media/]trazodone uk[/url] [url=http://benicar.site/]benicar 20 mg cost[/url] [url=http://cialisetabs.monster/]tadalafil for sale uk[/url] [url=http://disulfiram.site/]buy antabuse pills[/url]
MichaelGuabe · September 2, 2022 at 1:08 pm
[url=http://biaxin.fun/]biaxin online[/url]
ZakCounk · September 2, 2022 at 1:22 pm
[url=https://bactrim.icu/]bactrim ds cost[/url] [url=https://lasix.fun/]furosemide drug[/url]
IvyCounk · September 2, 2022 at 1:30 pm
[url=http://lasix.fun/]furosemide medication[/url] [url=http://onlinedrugstore.xyz/]canadian pharmacy generic viagra[/url] [url=http://doxycycline.fun/]order doxycycline online[/url] [url=http://budesonide.fun/]budesonide 0.5 mg[/url] [url=http://prozac.capetown/]prozac 20 mg capsule[/url] [url=http://bactrim.icu/]bactrim 800 160[/url] [url=http://lisinopril.media/]lisinopril tablets india[/url]
JudyCounk · September 2, 2022 at 1:34 pm
[url=http://accutane.site/]accutane nz[/url]
Davidhup · September 2, 2022 at 1:35 pm
[url=http://zoloft.ink/]order zoloft online no prescription[/url]
Estebanguall · September 2, 2022 at 1:37 pm
[url=https://disulfiram.fun/]antabuse pill[/url]
JackCounk · September 2, 2022 at 1:40 pm
[url=https://silagra.xyz/]silagra tablets[/url]
TommyHepsy · September 2, 2022 at 1:42 pm
[url=http://chloroquine.fun/]chloroquine 250 mg tab[/url]
AshCounk · September 2, 2022 at 1:48 pm
[url=https://glucophage.digital/]metformin generic price[/url] [url=https://mebendazole.store/]where can i get vermox over the counter[/url] [url=https://accutane.company/]accutane cream for sale[/url] [url=https://vermox.best/]order vermox over the counter[/url] [url=https://sixtabs.com/]ordering clomid online canada[/url] [url=https://trental.shop/]trental generic[/url] [url=https://trimox.store/]amoxicillin pharmacy price[/url] [url=https://wellbutrin.guru/]wellbutrin prescription mexico[/url]
EvaCounk · September 2, 2022 at 1:50 pm
[url=http://bupropion.site/]bupropion 450 mg daily[/url]
Michaelemult · September 2, 2022 at 2:03 pm
[url=https://duloxetine.xyz/]cheapest price for cymbalta[/url]
TedCounk · September 2, 2022 at 2:24 pm
[url=https://lasix.boutique/]lasix medication[/url]
SamCounk · September 2, 2022 at 2:38 pm
[url=http://strattera.today/]strattera 60 mg capsule[/url] [url=http://onlinedrugstore.digital/]trustworthy online pharmacy[/url] [url=http://cephalexin.xyz/]cephalexin average cost[/url] [url=http://prednisone.fun/]how much is prednisone[/url] [url=http://celecoxib.fun/]celebrex over the counter[/url] [url=http://silagra.xyz/]silagra tablet[/url] [url=http://tenormin.fun/]atenolol 50[/url]
RodneyTab · September 2, 2022 at 2:58 pm
[url=https://cialisktabs.quest/]cialis canada[/url]
TedCounk · September 2, 2022 at 3:01 pm
[url=https://escitalopram.cfd/]lexapro canada brand name[/url]
MiaCounk · September 2, 2022 at 3:05 pm
[url=http://strattera.today/]strattera 25 mg coupon[/url]
DenCounk · September 2, 2022 at 3:06 pm
[url=https://onlinedrugstore.digital/]canadapharmacyonline[/url]
LisaCounk · September 2, 2022 at 3:09 pm
[url=https://clomid.site/]buy clomid australia[/url]
KimCounk · September 2, 2022 at 3:15 pm
[url=https://isotretinoin.fun/]where to get accutane uk[/url]
Edgarlor · September 2, 2022 at 3:49 pm
[url=https://neurontin.click/]neurontin 400 mg capsules[/url]
KiaCounk · September 2, 2022 at 3:58 pm
[url=https://doxycycline.fun/]doxycycline cost canada[/url]
IvyCounk · September 2, 2022 at 4:02 pm
[url=http://sildalis.sbs/]sildalis tablets[/url] [url=http://zithromax.site/]how much is azithromycin[/url] [url=http://silagra.xyz/]buy silagra online[/url] [url=http://onlinedrugstore.fun/]no script pharmacy[/url] [url=http://bupropion.site/]wellbutrin order online[/url] [url=http://ampicillin.life/]buy ampicillin no prescription[/url]
JaneCounk · September 2, 2022 at 4:03 pm
[url=http://clomid.network/]clomid for sale in mexico[/url]
AshCounk · September 2, 2022 at 4:13 pm
[url=https://cymbalta.boutique/]cymbalta 60 mg for sale[/url] [url=https://prozac.digital/]buy prozac online india[/url] [url=https://tretinoin.sale/]retin a 0.05 price[/url] [url=https://allopurinol.cyou/]buy allopurinol online uk[/url]
JasonCounk · September 2, 2022 at 4:29 pm
[url=https://strattera.today/]strattera order online[/url]
AmyCounk · September 2, 2022 at 4:30 pm
[url=http://isotretinoin.fun/]accutane online[/url]
CarlCounk · September 2, 2022 at 4:31 pm
[url=http://erectafil.fun/]erectafil 5 mg[/url]
WilliamWem · September 2, 2022 at 4:40 pm
[url=https://tizanidine.xyz/]buy tizanidine 4mg online[/url] [url=https://gabapentin.site/]gabapentin cap 400 mg[/url] [url=https://diflucan.fun/]discount diflucan[/url] [url=https://robaxin.site/]robaxin/methocarbamol 500mg[/url]
KiaCounk · September 2, 2022 at 4:49 pm
[url=https://arimidex.cfd/]arimidex cost[/url]
JaneCounk · September 2, 2022 at 5:01 pm
[url=http://onlinedrugstore.xyz/]pharmacy discount coupons[/url]
JoeCounk · September 2, 2022 at 5:11 pm
[url=https://onlinedrugstore.fun/]legitimate online pharmacy usa[/url] [url=https://budesonide.fun/]budesonide cost[/url] [url=https://accutane.site/]buy generic accutane[/url]
WilliamWem · September 2, 2022 at 5:15 pm
[url=https://valtrex.site/]cost of valtrex tablets[/url] [url=https://hydroxychloroquine.download/]quineprox 40[/url] [url=https://lexapro.sbs/]buy cheap lexapro[/url] [url=https://viagraptab.quest/]cost of viagra per pill[/url] [url=https://metformin.wiki/]metformin online buy[/url] [url=https://cialisetabs.monster/]brand cialis 20 mg[/url]
ElwoodGon · September 2, 2022 at 5:17 pm
[url=http://cialisktabs.quest/]cialis 500[/url]
TedCounk · September 2, 2022 at 5:46 pm
[url=https://albendazole.sbs/]albendazole 400 tablet[/url]
DenCounk · September 2, 2022 at 5:47 pm
[url=https://amoxicillin.joburg/]augmentin 625 in usa[/url]
ElwoodGon · September 2, 2022 at 5:58 pm
[url=http://cialisrtabs.quest/]generic cialis for sale online[/url]
JudyCounk · September 2, 2022 at 6:09 pm
[url=http://lisinopril.media/]lisinopril 20 mg for sale[/url]
Davidhup · September 2, 2022 at 6:18 pm
[url=http://zoloft.ink/]zoloft 100mg pill[/url]
WilliamWem · September 2, 2022 at 6:29 pm
[url=https://azithromycin.ink/]generic zithromax 250mg[/url] [url=https://lexapro.sbs/]lexapro 30 mg tablet[/url] [url=https://mebendazole.cfd/]where can i buy vermox medication online[/url] [url=https://sildenafil.ink/]buy viagra online[/url] [url=https://paxil.site/]paroxetine 10mg tablets cost[/url] [url=https://bactrim.site/]bactrim 800mg 160mg[/url]
KiaCounk · September 2, 2022 at 6:38 pm
[url=https://onlinedrugstore.fun/]affordable pharmacy[/url]
YonCounk · September 2, 2022 at 6:51 pm
[url=https://bactrim.icu/]buy bactrim antibiotic[/url]
RichardFaply · September 2, 2022 at 6:52 pm
[url=https://viagraptab.quest/]5 viagra[/url] [url=https://metformin.wiki/]no prescription metformin online[/url] [url=https://bupropion.cfd/]cost of wellbutrin 75mg[/url] [url=https://doxycycline.party/]medication doxycycline 100mg[/url] [url=https://neurontin.click/]neurontin canada[/url]
IvyCounk · September 2, 2022 at 6:53 pm
[url=http://strattera.today/]order strattera[/url] [url=http://doxycycline.joburg/]doxycycline india[/url] [url=http://cialisrtab.monster/]tadalafil 2.5 mg in india[/url]
Michaeldrist · September 2, 2022 at 6:55 pm
[url=http://sildenafil.ink/]buy viagra online cheap usa[/url]
RicIsose · September 2, 2022 at 6:56 pm
[url=http://chloroquine.fun/]generic aralen[/url] [url=http://bupropion.cfd/]price of wellbutrin 75mg[/url] [url=http://ciprofloxacin.xyz/]cipro rx 500mg[/url] [url=http://propecia.moscow/]generic propecia 2019[/url] [url=http://sildenafil.ink/]pink viagra for women[/url] [url=http://doxycycline.party/]can you buy doxycycline over the counter in south africa[/url] [url=http://duloxetine.xyz/]cymbalta 20 mg canada[/url]
TedCounk · September 2, 2022 at 7:03 pm
[url=https://strattera.click/]strattera 18[/url]
MichaelDwego · September 2, 2022 at 7:07 pm
[url=https://tadacip.fun/]generic tadacip[/url]
JimCounk · September 2, 2022 at 7:24 pm
[url=https://prozac.capetown/]prozac rx[/url]
ElwoodGon · September 2, 2022 at 7:26 pm
[url=http://cialisetabs.monster/]buy generic cialis 20mg[/url]
TeoCounk · September 2, 2022 at 7:42 pm
[url=https://accutane.site/]accutane generic over the counter[/url]
JackCounk · September 2, 2022 at 7:51 pm
[url=https://cialisrtab.monster/]cialis from canada to usa[/url]
JudyCounk · September 2, 2022 at 8:21 pm
[url=http://budesonide.fun/]budesonide brand[/url]
ZakCounk · September 2, 2022 at 8:32 pm
[url=https://zithromax.site/]zithromax cost[/url] [url=https://lisinopril.media/]lisinopril 20mg[/url] [url=https://lasix.fun/]furosemide cost price[/url] [url=https://celecoxib.fun/]celebrex online without prescription[/url]
ElwoodGon · September 2, 2022 at 8:39 pm
[url=http://chloroquine.fun/]chloroquine diphosphate[/url]
CarlCounk · September 2, 2022 at 8:39 pm
[url=http://viagraftab.quest/]generic viagra australia paypal[/url]
MiclTek · September 2, 2022 at 8:42 pm
[url=http://cialisktabs.quest/]generic cialis 5mg cost[/url]
RichardFaply · September 2, 2022 at 8:45 pm
[url=https://avodart.site/]avodart cost uk[/url] [url=https://mebendazole.xyz/]vermox sale[/url] [url=https://paxil.site/]paxil rx[/url]
Davidhup · September 2, 2022 at 8:46 pm
[url=http://doxycycline.party/]doxycycline 7.5 mg[/url]
KimCounk · September 2, 2022 at 8:54 pm
[url=https://viagraftab.quest/]sildenafil medication[/url]
TeoCounk · September 2, 2022 at 8:59 pm
[url=https://lexapro.today/]where can i buy generic lexapro[/url]
UgoCounk · September 2, 2022 at 9:01 pm
[url=http://ibuprofenmotrin.monster/]can you buy motrin 600 over the counter[/url]
Estebanguall · September 2, 2022 at 9:09 pm
[url=https://glucophage.life/]glucophage xr 500[/url]
NickCounk · September 2, 2022 at 9:19 pm
[url=http://amoxicillin.joburg/]amoxil 875 125 mg[/url]
EvaCounk · September 2, 2022 at 9:26 pm
[url=http://onlinedrugstore.xyz/]web pharmacy[/url]
PaulCounk · September 2, 2022 at 9:29 pm
[url=https://bactrim.icu/]bactrim forte medicine bactrim antibiotic[/url]
IvyCounk · September 2, 2022 at 9:44 pm
[url=http://lexapro.today/]lexapro canada[/url] [url=http://cialisitabs.quest/]buy generic cialis[/url] [url=http://onlinedrugstore.xyz/]all med pharmacy[/url] [url=http://onlinedrugstore.fun/]brazilian pharmacy online[/url] [url=http://arimidex.cfd/]buy cheap arimidex[/url] [url=http://clomid.site/]buy clomid online prescription[/url] [url=http://toradol.today/]medicine toradol 10mg[/url] [url=http://cialisrtab.monster/]cost of cialis 5mg daily[/url]
JimCounk · September 2, 2022 at 9:51 pm
[url=https://toradol.today/]toradol 10mg discount[/url]
Charlesaduse · September 2, 2022 at 10:00 pm
[url=http://tadacip.fun/]tadacip best price[/url]
Jameseloro · September 2, 2022 at 10:02 pm
[url=https://glucophage.life/]glucophage xr generic[/url] [url=https://propranolol.life/]order inderal online[/url] [url=https://mebendazole.cfd/]medicine vermox[/url] [url=https://neurontin.fun/]neurontin 200[/url] [url=https://bupropion.cfd/]wellbutrin 200[/url]
Curtisvibia · September 2, 2022 at 10:14 pm
[url=https://trazodone.media/]trazodone no prescription uk[/url]
Charlesaduse · September 2, 2022 at 10:28 pm
[url=http://femaleviagra.monster/]cost of sildenafil in mexico[/url]
MiclTek · September 2, 2022 at 10:42 pm
[url=http://viagraptab.quest/]can i buy viagra over the counter in usa[/url]
RicIsose · September 2, 2022 at 10:49 pm
[url=http://robaxin.site/]robaxin for back pain[/url] [url=http://hydroxychloroquine.mom/]plaquenil 200 mg oral tablet[/url] [url=http://paxil.site/]order generic paxil online[/url] [url=http://cialisetabs.monster/]tadalafil 20 mg[/url]
MarvinZem · September 2, 2022 at 10:54 pm
[url=http://paxil.site/]cost of 30 paroxetine[/url]
RicIsose · September 2, 2022 at 10:55 pm
[url=http://hydroxychloroquine.download/]hydroxychloroquine 100 mg tablet[/url] [url=http://neurontin.fun/]medication neurontin[/url] [url=http://duloxetine.xyz/]generic for cymbalta[/url] [url=http://neurontin.click/]gabapentin 30 mg[/url] [url=http://disulfiram.site/]buy cheap antabuse[/url] [url=http://robaxin.site/]robaxin for pain[/url] [url=http://tizanidine.xyz/]zanaflex pill[/url]
SamCounk · September 2, 2022 at 10:55 pm
[url=http://doxycycline.fun/]doxycycline 250 mg[/url] [url=http://lexapro.today/]lexapro 10 mg pill[/url] [url=http://clomid.site/]clomid 50mg mexico[/url] [url=http://bupropion.site/]bupropion 50mg pill[/url] [url=http://silagra.xyz/]silagra canada[/url] [url=http://sildalis.sbs/]sildalis[/url] [url=http://celecoxib.fun/]celebrex generic mexico[/url] [url=http://toradol.today/]toradol without prescription[/url]
WimCounk · September 2, 2022 at 11:01 pm
[url=http://buycolchicine.shop/]colchicine where can i buy[/url]
JackCounk · September 2, 2022 at 11:07 pm
[url=https://cephalexin.xyz/]cephalexin canadian pharmacy[/url]
JoeCounk · September 2, 2022 at 11:10 pm
[url=https://celecoxib.fun/]buy celebrex canadian pharmacy[/url] [url=https://zithromax.site/]azithromycin 250 mg tabs[/url] [url=https://silagra.fun/]buy silagra[/url] [url=https://silagra.xyz/]silagra 50 mg tablet[/url] [url=https://accutane.site/]how to get accutane online[/url] [url=https://onlinedrugstore.xyz/]canadian pharmacy 24 com[/url]
WimCounk · September 2, 2022 at 11:14 pm
[url=http://phenergan.guru/]phenergan medicine[/url]
IvyCounk · September 2, 2022 at 11:27 pm
[url=http://zithromax.site/]zithromax 250[/url] [url=http://strattera.click/]strattera 2016[/url] [url=http://isotretinoin.fun/]buy accutane cream[/url] [url=http://onlinedrugstore.digital/]canada pharmacy coupon[/url] [url=http://escitalopram.cfd/]cipralex generic best price[/url] [url=http://doxycycline.joburg/]doxycycline without prescription[/url] [url=http://effexor.life/]250 mg effexor[/url]
JoeCounk · September 2, 2022 at 11:41 pm
[url=https://budesonide.fun/]budesonide 32 mcg[/url] [url=https://cephalexin.xyz/]buy keflex online without prescription[/url]
IvyCounk · September 2, 2022 at 11:44 pm
[url=http://onlinedrugstore.fun/]canadian pharmacy coupon code[/url] [url=http://hydroxychloroquine.tech/]hydroxychloroquine sulfate price[/url] [url=http://anafranil.site/]order anafranil from canada[/url] [url=http://clomid.site/]how to purchase clomid[/url] [url=http://prednisone.fun/]where can i buy prednisone over the counter uk[/url]
PaulCounk · September 2, 2022 at 11:46 pm
[url=https://trimox.xyz/]augmentin 93[/url]
Michaeldrist · September 2, 2022 at 11:54 pm
[url=http://viagraetab.quest/]viagra usa[/url]
EyeCounk · September 3, 2022 at 12:00 am
[url=https://arimidex.cfd/]arimidex generic india[/url] [url=https://doxycycline.joburg/]doxycycline tablets online[/url] [url=https://ampicillin.life/]ampicillin 500 mg[/url] [url=https://doxycycline.fun/]doxycycline 40 mg capsules[/url]
AnnaCounk · September 3, 2022 at 12:03 am
[url=http://strattera.today/]buy strattera without prescription[/url]
BooCounk · September 3, 2022 at 12:08 am
[url=https://sildallis.com/]buy sildalis 120 mg[/url]
MichaelGuabe · September 3, 2022 at 12:32 am
[url=http://femaleviagra.monster/]sildenafil 5 mg[/url]
Edgarlor · September 3, 2022 at 12:38 am
[url=https://viagraptab.quest/]cost of viagra in mexico[/url]
LisaCounk · September 3, 2022 at 12:53 am
[url=https://strattera.click/]strattera pills for sale[/url]
KimCounk · September 3, 2022 at 12:54 am
[url=https://budesonide.fun/]budecort price[/url]
Davidhup · September 3, 2022 at 1:12 am
[url=http://mebendazole.xyz/]can you buy vermox over the counter[/url]
SamCounk · September 3, 2022 at 1:25 am
[url=http://onlinedrugstore.xyz/]foreign pharmacy online[/url] [url=http://ampicillin.life/]ampicillin no prescription[/url] [url=http://viagraftab.quest/]sildenafil online sale[/url] [url=http://onlinedrugstore.digital/]pharmacy rx[/url]
WimCounk · September 3, 2022 at 1:31 am
[url=http://yasmindrug.com/]order yasmin online uk[/url]
JoeCounk · September 3, 2022 at 1:37 am
[url=https://clomid.site/]generic clomid online[/url] [url=https://hydroxychloroquine.tech/]plaquenil generic price[/url] [url=https://gabapentin.xyz/]gabapentin 5027[/url] [url=https://isotretinoin.fun/]accutane 10mg for sale[/url] [url=https://onlinedrugstore.xyz/]medication canadian pharmacy[/url] [url=https://albendazole.sbs/]albendazole 400mg tablet price[/url] [url=https://strattera.today/]strattera 18 mg capsule[/url]
TeoCounk · September 3, 2022 at 1:44 am
[url=https://doxycycline.fun/]doxycycline 300 mg daily[/url]
CarlCounk · September 3, 2022 at 1:46 am
[url=http://prednisone.fun/]deltasone 5 mg[/url]
NickCounk · September 3, 2022 at 2:03 am
[url=http://erectafil.fun/]erectafil 10[/url]
TommyHepsy · September 3, 2022 at 2:07 am
[url=http://zithromax.fun/]how much is azithromycin 250 mg[/url]
YonCounk · September 3, 2022 at 2:15 am
[url=https://cialisrtab.monster/]online tadalafil prescription[/url]
MiclTek · September 3, 2022 at 2:42 am
[url=http://vardenafil.life/]where to buy vardenafil 10 mg[/url]
MichaelDwego · September 3, 2022 at 2:52 am
[url=https://azithromycin.ink/]zithromax pills for sale[/url]
SamCounk · September 3, 2022 at 3:00 am
[url=http://toradol.today/]toradol daily[/url] [url=http://onlinedrugstore.fun/]canadianpharmacymeds[/url] [url=http://sildalis.sbs/]sildalis tablets[/url]
TedCounk · September 3, 2022 at 3:02 am
[url=https://ampicillin.life/]ampicillin 500[/url]
Samuelraisk · September 3, 2022 at 3:14 am
[url=https://hydroxychloroquine.download/]plaquenil 40 mg[/url]
AlanCounk · September 3, 2022 at 3:18 am
[url=http://azithromycin.business/]azithromycin india cost[/url] [url=http://silagra.xyz/]buy silagra in australia[/url] [url=http://budesonide.fun/]budesonide 9 mg tablets in india[/url] [url=http://bupropion.site/]wellbutrin pill[/url] [url=http://levothyroxine.site/]0.125 mg synthroid[/url] [url=http://lexapro.today/]best price for lexapro[/url]
MiaCounk · September 3, 2022 at 3:27 am
[url=http://amoxicillin.joburg/]amoxicillin price 250 mg[/url]
KimCounk · September 3, 2022 at 3:32 am
[url=https://atarax.click/]atarax 100 mg[/url]
ElwoodGon · September 3, 2022 at 3:55 am
[url=http://neurontin.click/]1500 mg gabapentin[/url]
MichaelGuabe · September 3, 2022 at 4:06 am
[url=http://tizanidine.xyz/]tizanidine tablets[/url]
DarrylSef · September 3, 2022 at 4:17 am
[url=http://glucophage.life/]metformin 500 mg over the counter[/url] [url=http://chloroquine.fun/]aralen 500mg[/url] [url=http://robaxin.site/]robaxin 500 mg[/url] [url=http://propecia.moscow/]cheap propecia finasteride[/url]
MiaCounk · September 3, 2022 at 4:28 am
[url=http://prozac.capetown/]buying prozac online[/url]
ElwoodGon · September 3, 2022 at 4:33 am
[url=http://azithromycin.ink/]azithromycin 2 g[/url]
EyeCounk · September 3, 2022 at 4:40 am
[url=https://bactrim.icu/]bactrim 500 mg tablet[/url] [url=https://gabapentin.xyz/]gabapentin cream where to buy[/url] [url=https://strattera.today/]buy strattera without prescription[/url] [url=https://onlinedrugstore.xyz/]canada drug pharmacy[/url] [url=https://silagra.fun/]silagra 50[/url] [url=https://isotretinoin.fun/]accutane medication[/url]
DarrylSef · September 3, 2022 at 4:48 am
[url=http://avodart.site/]avodart uk online[/url] [url=http://bactrim.site/]bactrim online no prescrition[/url] [url=http://albenza.xyz/]purchase albendazole online[/url] [url=http://cialisrtabs.quest/]generic tadalafil from canada[/url] [url=http://metformin.wiki/]metformin 1mg[/url] [url=http://mebendazole.cfd/]order vermox online canada[/url]
EvaCounk · September 3, 2022 at 4:49 am
[url=http://doxycycline.joburg/]buy doxycycline hyclate 100mg without a rx[/url]
AnnaCounk · September 3, 2022 at 5:03 am
[url=http://doxycycline.fun/]how to get doxycycline 100mg[/url]
Michaelemult · September 3, 2022 at 5:15 am
[url=https://benicar.site/]benicar pill[/url]
Curtisvibia · September 3, 2022 at 5:19 am
[url=https://viagraetab.quest/]order viagra canadian pharmacy[/url]
DarrylSef · September 3, 2022 at 5:20 am
[url=http://bupropion.cfd/]150 mg wellbutrin[/url] [url=http://propranolol.life/]inderal price in uk[/url] [url=http://neurontin.click/]gabapentin 600 mg price[/url] [url=http://tadacip.fun/]canadian pharmacy tadacip[/url]
DavisMug · September 3, 2022 at 5:31 am
[url=https://cialisrtabs.quest/]cialis online prescription[/url]
AshCounk · September 3, 2022 at 5:32 am
[url=https://buylanoxin.works/]digoxin 0.5[/url] [url=https://proscar.boutique/]propecia canada pharmacy online[/url] [url=https://synthroid.agency/]synthroid 50[/url] [url=https://robaxin.store/]robaxin price canada[/url] [url=https://indocin.shop/]indocin sr 75 mg[/url] [url=https://antabuse.boutique/]buy disulfiram online uk[/url]
RodneyTab · September 3, 2022 at 5:38 am
[url=https://hydroxychloroquine.mom/]hydroxychloroquine 200mg[/url]
AmyCounk · September 3, 2022 at 5:42 am
[url=http://zofran.fun/]zofran capsule[/url]
ElwoodGon · September 3, 2022 at 5:43 am
[url=http://paxil.site/]paroxetine 15 mg[/url]
JaneCounk · September 3, 2022 at 6:06 am
[url=http://atarax.click/]atarax 25mg uk[/url]
ElwoodGon · September 3, 2022 at 6:18 am
[url=http://permethrin.xyz/]elimite cream 5[/url]
DavisMug · September 3, 2022 at 6:27 am
[url=https://cialisetabs.monster/]cialis 2.5 mg online[/url]
RichardFaply · September 3, 2022 at 6:29 am
[url=https://bupropion.cfd/]wellbutrin online prescription[/url] [url=https://hydroxychloroquine.download/]hydroxychloroquine 0.5[/url] [url=https://bactrim.site/]bactrim 800 160[/url] [url=https://clonidine.fun/]clonidine hydrochloride 0.1 mg[/url]
EvaCounk · September 3, 2022 at 6:38 am
[url=http://cialisrtab.monster/]chewing cialis[/url]
Michaeldrist · September 3, 2022 at 6:44 am
[url=http://zithromax.fun/]azithromycin cheapest price[/url]
Jameseloro · September 3, 2022 at 6:44 am
[url=https://mebendazole.xyz/]vermox over the counter uk[/url] [url=https://lexapro.sbs/]lexapro canadian pharmacy[/url] [url=https://bupropion.cfd/]mexico bupropion 150mg[/url]
Michaelemult · September 3, 2022 at 6:48 am
[url=https://zithromax.fun/]azithromycin 500 mg generic[/url]
TedCounk · September 3, 2022 at 6:50 am
[url=https://azithromycin.business/]azithromycin online order usa[/url]
MaryCounk · September 3, 2022 at 6:54 am
[url=https://hydroxychloroquine.tech/]plaquenil 200 mg canada price[/url] [url=https://trimox.xyz/]augmentin 625 price[/url] [url=https://onlinedrugstore.digital/]online pharmacy cialis[/url]
EvaCounk · September 3, 2022 at 7:12 am
[url=http://doxycycline.fun/]doxycycline 50 mg price[/url]
AmyCounk · September 3, 2022 at 7:26 am
[url=http://trimox.xyz/]augmentin tablet[/url]
EvaCounk · September 3, 2022 at 7:42 am
[url=http://prozac.capetown/]40 mg fluoxetine pills[/url]
UgoCounk · September 3, 2022 at 7:43 am
[url=http://nexium.works/]cost of nexium 40 mg in australia[/url]
MarvinZem · September 3, 2022 at 7:45 am
[url=http://valtrex.site/]valtrex medicine price[/url]
Edgarlor · September 3, 2022 at 7:48 am
[url=https://avodart.site/]prescription drug avodart[/url]
WilliamWem · September 3, 2022 at 7:58 am
[url=https://zithromax.fun/]azithromycin 250[/url] [url=https://viagraetab.quest/]over the counter viagra in us[/url]
JasonCounk · September 3, 2022 at 8:16 am
[url=https://escitalopram.cfd/]buy lexapro brand name online[/url]
TimothyThive · September 3, 2022 at 8:21 am
[url=http://albenza.xyz/]generic albenza[/url]
JasonCounk · September 3, 2022 at 8:39 am
[url=https://anafranil.site/]order anafranil from canada[/url]
EyeCounk · September 3, 2022 at 8:51 am
[url=https://escitalopram.cfd/]lexapro online cheap[/url] [url=https://accutane.site/]buy generic accutane[/url]
TommyHepsy · September 3, 2022 at 8:51 am
[url=http://lexapro.sbs/]lexapro wellbutrin[/url]
BooCounk · September 3, 2022 at 9:09 am
[url=https://kamagra.guru/]buy kamagra jelly 100mg[/url]
JaneCounk · September 3, 2022 at 9:14 am
[url=http://trimox.xyz/]how to order amoxicillin[/url]
RichardFaply · September 3, 2022 at 9:15 am
[url=https://zoloft.ink/]zoloft 100 mg tablet[/url] [url=https://propecia.moscow/]generic propecia coupon[/url] [url=https://duloxetine.cfd/]cymbalta coupon[/url]
JackCounk · September 3, 2022 at 9:25 am
[url=https://gabapentin.xyz/]neurontin medicine[/url]
IvyCounk · September 3, 2022 at 9:38 am
[url=http://trimox.xyz/]how to order amoxicillin[/url] [url=http://gabapentin.xyz/]neurontin 400 mg tablets[/url]
JasonCounk · September 3, 2022 at 9:45 am
[url=https://toradol.today/]buy toradol online canada[/url]
Jameseloro · September 3, 2022 at 9:48 am
[url=https://biaxin.fun/]biaxin for tooth infection[/url] [url=https://trazodone.media/]trazodone 4[/url] [url=https://allopurinol.site/]generic allopurinol 100mg[/url]
JudyCounk · September 3, 2022 at 9:49 am
[url=http://onlinedrugstore.fun/]canada pharmacy 24h[/url]
RichardFaply · September 3, 2022 at 10:41 am
[url=https://robaxin.site/]buy robaxin online without prescription[/url] [url=https://propecia.moscow/]propecia online uk[/url] [url=https://disulfiram.site/]antabuse ordering from uk[/url] [url=https://sildenafil.ink/]viagra non prescription[/url]
MiclTek · September 3, 2022 at 10:48 am
[url=http://chloroquine.fun/]aralen 250 mg[/url]
Samuelraisk · September 3, 2022 at 10:52 am
[url=https://neurontin.fun/]cost of gabapentin 100mg[/url]
KiaCounk · September 3, 2022 at 10:54 am
[url=https://gabapentin.xyz/]neurontin 300mg capsule[/url]
JaneCounk · September 3, 2022 at 10:57 am
[url=http://azithromycin.business/]buy zithromax no prescription[/url]
RichardFaply · September 3, 2022 at 10:59 am
[url=https://clonidine.fun/]clonidine .1mg[/url] [url=https://doxycycline.party/]doxycycline 3626[/url] [url=https://propecia.moscow/]propecia script[/url] [url=https://viagraetab.quest/]buy sildenafil citrate online[/url] [url=https://robaxin.site/]robaxin over the counter[/url] [url=https://mebendazole.cfd/]where can i buy vermox tablets[/url] [url=https://neurontin.fun/]purchase neurontin online[/url]
AmyCounk · September 3, 2022 at 11:02 am
[url=http://silagra.fun/]silagra pills[/url]
JackCounk · September 3, 2022 at 11:06 am
[url=https://clomid.network/]how to buy clomid[/url]
Michaeldrist · September 3, 2022 at 11:08 am
[url=http://disulfiram.site/]buy antabuse online usa[/url]
UgoCounk · September 3, 2022 at 11:12 am
[url=http://cafergot.store/]cafergot medication generic[/url]
IvyCounk · September 3, 2022 at 11:51 am
[url=http://budesonide.fun/]budesonide 100 mcg[/url] [url=http://silagra.fun/]silagra 100mg tablets[/url] [url=http://cephalexin.xyz/]generic cephalexin[/url] [url=http://toradol.today/]toradol pill cost[/url] [url=http://celecoxib.fun/]celebrex 200 mg cost[/url]
NickCounk · September 3, 2022 at 11:53 am
[url=http://budesonide.fun/]budesonide 3 mg[/url]
Estebanguall · September 3, 2022 at 11:53 am
[url=https://vardenafil.life/]levitra 20 mg cheap[/url]
MarkCounk · September 3, 2022 at 11:56 am
[url=https://amoxicillin.joburg/]amoxicillin canada price[/url]
AmyCounk · September 3, 2022 at 12:00 pm
[url=http://amoxil.fun/]augmentin 500mg price in india[/url]
MarkCounk · September 3, 2022 at 12:13 pm
[url=https://albendazole.sbs/]albendazole price in mexico[/url]
LisaCounk · September 3, 2022 at 12:17 pm
[url=https://albendazole.sbs/]buy albendazole canada[/url]
RodneyTab · September 3, 2022 at 12:20 pm
[url=https://neurontin.fun/]where to buy gabapentin online[/url]
IvyCounk · September 3, 2022 at 12:44 pm
[url=http://bactrim.icu/]bactrim 400[/url] [url=http://lexapro.today/]generic lexapro[/url] [url=http://arimidex.cfd/]arimidex tablets price in india[/url] [url=http://strattera.today/]buy strattera online pharmacy[/url] [url=http://celecoxib.fun/]celebrex 200mg capsules price[/url] [url=http://amoxicillin.joburg/]cost of generic amoxicillin[/url] [url=http://accutane.site/]order accutane from canada[/url]
JimCounk · September 3, 2022 at 12:51 pm
[url=https://prednisone.fun/]over the counter prednisone medicine[/url]
SueCounk · September 3, 2022 at 1:12 pm
[url=http://lisinopril.media/]order lisinopril without a prescription[/url]
DavisMug · September 3, 2022 at 1:18 pm
[url=https://chloroquine.fun/]chloroquine 900[/url]
SamCounk · September 3, 2022 at 1:18 pm
[url=http://toradol.today/]medicine toradol 10mg[/url] [url=http://cialisrtab.monster/]buy cialis from canadian pharmacy[/url] [url=http://effexor.life/]159 mg effexor[/url] [url=http://trimox.xyz/]augmentin 875 mg 37.5mg[/url] [url=http://zofran.fun/]zofran 4mg tablets cost[/url] [url=http://doxycycline.fun/]purchase doxycycline[/url] [url=http://doxycycline.joburg/]buying doxycycline online in usa[/url]
PaulCounk · September 3, 2022 at 1:29 pm
[url=https://budesonide.fun/]budesonide 1 mg tablet[/url]
RobertFoold · September 3, 2022 at 1:33 pm
[url=https://disulfiram.fun/]disulfiram tablets[/url]
DenCounk · September 3, 2022 at 1:50 pm
[url=https://arimidex.cfd/]where to get arimidex in canada[/url]
IvyCounk · September 3, 2022 at 2:04 pm
[url=http://escitalopram.cfd/]how much is lexapro 10mg[/url] [url=http://zithromax.site/]zithromax capsules buy[/url] [url=http://albendazole.sbs/]purchase albendazole[/url] [url=http://bupropion.site/]how much is wellbutrin[/url] [url=http://bactrim.icu/]otc cost bactrim[/url] [url=http://sildalis.sbs/]buy sildalis[/url] [url=http://onlinedrugstore.xyz/]us pharmacy[/url]
AnnaCounk · September 3, 2022 at 2:12 pm
[url=http://bactrim.icu/]bactrim 960 mg[/url]
IvyCounk · September 3, 2022 at 2:16 pm
[url=http://doxycycline.fun/]how can i get doxycycline[/url] [url=http://gabapentin.xyz/]gabapentin 800[/url] [url=http://clomid.network/]clomid in australia[/url] [url=http://anafranil.site/]anafranil for anxiety[/url]
Michaelemult · September 3, 2022 at 2:41 pm
[url=https://allopurinol.site/]allopurinol over the counter[/url]
LisaCounk · September 3, 2022 at 3:04 pm
[url=https://dexamethasone.fun/]dexamethasone 15 mg[/url]
EvaCounk · September 3, 2022 at 3:24 pm
[url=http://lasix.boutique/]lasix medication generic[/url]
PaulCounk · September 3, 2022 at 3:33 pm
[url=https://lasix.fun/]furosemide 12.5 mg without prescription[/url]
IvyCounk · September 3, 2022 at 3:36 pm
[url=http://levothyroxine.site/]buy synthroid online cheap[/url] [url=http://onlinedrugstore.digital/]canadian pharmacies that deliver to the us[/url]
Jameseloro · September 3, 2022 at 3:38 pm
[url=https://femaleviagra.monster/]how much is sildenafil 50 mg[/url] [url=https://neurontin.fun/]neurontin 400mg[/url] [url=https://clonidine.fun/]clonidine otc[/url]
Curtisvibia · September 3, 2022 at 3:40 pm
[url=https://avodart.site/]avodart 50mg[/url]
Michaeldrist · September 3, 2022 at 3:53 pm
[url=http://avodart.site/]avodart for sale[/url]
JasonCounk · September 3, 2022 at 4:08 pm
[url=https://doxycycline.joburg/]doxycycline 100mg[/url]
WimCounk · September 3, 2022 at 4:10 pm
[url=http://suhagrasilagra.com/]buy suhagra 25 mg[/url]
DavisMug · September 3, 2022 at 4:23 pm
[url=https://albenza.xyz/]abindazole[/url]
MaryCounk · September 3, 2022 at 4:32 pm
[url=https://silagra.fun/]silagra 100 online[/url] [url=https://atarax.click/]atarax for sleep[/url] [url=https://trimox.xyz/]amoxicillin 500mg no prescription[/url] [url=https://tenormin.fun/]atenolol 12.5mg daily[/url] [url=https://lexapro.today/]lexapro 5 mg tablet[/url] [url=https://zofran.fun/]zofran generic[/url]
SueCounk · September 3, 2022 at 4:32 pm
[url=http://sildalis.sbs/]sildalis[/url]
MichaelDwego · September 3, 2022 at 4:43 pm
[url=https://mebendazole.cfd/]where can i buy vermox in uk[/url]
Estebanguall · September 3, 2022 at 4:55 pm
[url=https://tadacip.fun/]tadacip 20 for sale[/url]
DavisMug · September 3, 2022 at 5:07 pm
[url=https://neurontin.fun/]gabapentin cost[/url]
UgoCounk · September 3, 2022 at 5:11 pm
[url=http://colchicine05.com/]colchicine 500mcg[/url]
EvaCounk · September 3, 2022 at 5:11 pm
[url=http://amoxicillin.joburg/]buying amoxicillin in mexico[/url]
JoeCounk · September 3, 2022 at 5:28 pm
[url=https://gabapentin.xyz/]gabapentin 250 mg[/url] [url=https://arimidex.cfd/]order arimidex online australia[/url] [url=https://cephalexin.xyz/]cephalexin cheap[/url] [url=https://zithromax.site/]azithromycin 500 buy online[/url] [url=https://lisinopril.media/]how to order lisinopril online[/url] [url=https://trimox.xyz/]where can i get cheap amoxicillin[/url] [url=https://onlinedrugstore.fun/]trustworthy online pharmacy[/url] [url=https://silagra.fun/]buy silagra online in india[/url]
KiaCounk · September 3, 2022 at 5:35 pm
[url=https://cephalexin.xyz/]cephalexin tablets 125mg[/url]
JackCounk · September 3, 2022 at 5:38 pm
[url=https://lexapro.today/]drug lexapro generic[/url]
KimCounk · September 3, 2022 at 5:42 pm
[url=https://sildalis.sbs/]buy sildalis[/url]
EvaCounk · September 3, 2022 at 5:56 pm
[url=http://doxycycline.fun/]doxycycline 200 mg[/url]
JaneCounk · September 3, 2022 at 6:01 pm
[url=http://clomid.network/]buy clomid otc[/url]
AlanCounk · September 3, 2022 at 6:07 pm
[url=http://clomid.site/]where to buy clomid uk[/url] [url=http://levothyroxine.site/]online synthroid[/url] [url=http://cialisitabs.quest/]tadalafil 50mg[/url]
ElwoodGon · September 3, 2022 at 6:30 pm
[url=http://viagraptab.quest/]viagra 100 mg canada[/url]
CarlCounk · September 3, 2022 at 6:32 pm
[url=http://amoxicillin.joburg/]where can i get amoxicillin 500 mg[/url]
JoeCounk · September 3, 2022 at 6:33 pm
[url=https://celecoxib.fun/]celebrex cost canada[/url] [url=https://doxycycline.fun/]how much is doxycycline[/url] [url=https://lisinopril.media/]prinivil 5 mg tablets[/url] [url=https://lasix.boutique/]furosemide[/url] [url=https://vardenafil.live/]where to purchase levitra[/url] [url=https://azithromycin.business/]where can i get zithromax over the counter[/url] [url=https://strattera.click/]strattera cap 40mg[/url] [url=https://hydroxychloroquine.tech/]plaquenil 200mg[/url]
RichardFaply · September 3, 2022 at 6:48 pm
[url=https://bactrim.site/]where to get bactrim[/url] [url=https://vardenafil.life/]levitra online purchase[/url]
TeoCounk · September 3, 2022 at 6:51 pm
[url=https://lasix.fun/]buy lasix 100mg[/url]
ElwoodGon · September 3, 2022 at 6:53 pm
[url=http://valtrex.site/]can i buy valtrex over the counter in australia[/url]
Edgarlor · September 3, 2022 at 7:09 pm
[url=https://neurontin.click/]neurontin capsules 100mg[/url]
AlanCounk · September 3, 2022 at 7:10 pm
[url=http://effexor.life/]effexor generic price[/url] [url=http://viagraftab.quest/]generic viagra uk[/url]
TeoCounk · September 3, 2022 at 7:14 pm
[url=https://clomid.site/]buy clomid tablets uk[/url]
SueCounk · September 3, 2022 at 7:14 pm
[url=http://lasix.boutique/]buy lasix 100mg[/url]
TedCounk · September 3, 2022 at 7:14 pm
[url=https://ampicillin.life/]buy ampicillin uk[/url]
Michaelemult · September 3, 2022 at 7:42 pm
[url=https://glucophage.life/]buy metformin er[/url]
Jameseloro · September 3, 2022 at 7:44 pm
[url=https://propranolol.life/]inderal 40 mg cost[/url] [url=https://benicar.site/]benicar price in india[/url] [url=https://clonidine.fun/]clonidime[/url] [url=https://neurontin.click/]gabapentin 103[/url] [url=https://doxycycline.party/]doxycycline generic price[/url]
IvyCounk · September 3, 2022 at 7:51 pm
[url=http://accutane.site/]accutane generic[/url] [url=http://cialisitabs.quest/]tadalafil india buy[/url] [url=http://isotretinoin.fun/]accutane[/url] [url=http://levothyroxine.site/]synthroid 75 mg cost[/url] [url=http://prednisone.fun/]buy prednisone without rx[/url]
ElwoodGon · September 3, 2022 at 7:51 pm
[url=http://avodart.site/]avodart cost[/url]
KimCounk · September 3, 2022 at 8:03 pm
[url=https://prednisone.fun/]prednisone online india[/url]
Michaeldrist · September 3, 2022 at 8:05 pm
[url=http://cialisrtabs.quest/]generic cialis price comparison[/url]
KimCounk · September 3, 2022 at 8:08 pm
[url=https://zofran.fun/]zofran tablets for sale[/url]
ElwoodGon · September 3, 2022 at 8:50 pm
[url=http://paxil.site/]paroxetine cheap[/url]
EvaCounk · September 3, 2022 at 8:58 pm
[url=http://zofran.fun/]8662329020 zofran[/url]
RodneyTab · September 3, 2022 at 9:06 pm
[url=https://diflucan.fun/]order diflucan online cheap[/url]
JoeCounk · September 3, 2022 at 9:08 pm
[url=https://dexamethasone.fun/]dexamethasone drug[/url] [url=https://zithromax.site/]azithromycin 500 mg tablet[/url] [url=https://doxycycline.fun/]doxycycline 300 mg tablet[/url]
WilliamWem · September 3, 2022 at 9:10 pm
[url=https://valtrex.site/]can you buy valtrex online[/url] [url=https://propecia.moscow/]propecia 1 mg for sale[/url]
ElwoodGon · September 3, 2022 at 9:22 pm
[url=http://celebrex.sbs/]celebrex 200 mg online[/url]
SueCounk · September 3, 2022 at 9:33 pm
[url=http://isotretinoin.fun/]online accutane[/url]
Edgarlor · September 3, 2022 at 9:37 pm
[url=https://avodart.site/]avodart tablets uk[/url]
JaneCounk · September 3, 2022 at 9:39 pm
[url=http://onlinedrugstore.fun/]my canadian pharmacy[/url]
AmyCounk · September 3, 2022 at 9:41 pm
[url=http://bupropion.site/]bupropion canada[/url]
TedCounk · September 3, 2022 at 9:43 pm
[url=https://gabapentin.xyz/]neurontin price south africa[/url]
Davidhup · September 3, 2022 at 9:47 pm
[url=http://benicar.site/]benicar rx[/url]
EvaCounk · September 3, 2022 at 9:59 pm
[url=http://silagra.fun/]silagra online[/url]
LisaCounk · September 3, 2022 at 10:05 pm
[url=https://lisinopril.media/]cost of lisinopril[/url]
MaryCounk · September 3, 2022 at 10:06 pm
[url=https://zofran.fun/]zofran 8mg tab[/url] [url=https://arimidex.cfd/]arimidex tablets 1mg[/url] [url=https://bactrim.icu/]bactrim brand name[/url] [url=https://cephalexin.xyz/]where can i buy cephalexin 500 mg[/url] [url=https://strattera.click/]buy generic strattera[/url]
DenCounk · September 3, 2022 at 10:09 pm
[url=https://strattera.click/]strattera 25[/url]
MichaelDwego · September 3, 2022 at 10:15 pm
[url=https://bupropion.cfd/]wellbutrin brand cost[/url]
Estebanguall · September 3, 2022 at 10:19 pm
[url=https://biaxin.fun/]biaxin for sale[/url]
LisaCounk · September 3, 2022 at 10:22 pm
[url=https://prednisone.fun/]prednisone 172[/url]
MichaelGuabe · September 3, 2022 at 10:25 pm
[url=http://femaleviagra.monster/]sildenafil pharmacy online[/url]
EvaCounk · September 3, 2022 at 10:26 pm
[url=http://viagraftab.quest/]how to buy viagra online in canada[/url]
KiaCounk · September 3, 2022 at 10:33 pm
[url=https://dexamethasone.fun/]dexamethasone tablets online[/url]
Davidhup · September 3, 2022 at 10:37 pm
[url=http://allopurinol.site/]allopurinol 300 mg tablet[/url]
EvaCounk · September 3, 2022 at 10:44 pm
[url=http://strattera.today/]buy strattera in india[/url]
AmyCounk · September 3, 2022 at 10:53 pm
[url=http://escitalopram.cfd/]lexapro 20 mg[/url]
TommyHepsy · September 3, 2022 at 10:57 pm
[url=http://avodart.site/]avodart capsule 0.5 mg[/url]
Samuelraisk · September 3, 2022 at 11:03 pm
[url=https://diflucan.fun/]diflucan without prescription 200mg[/url]
MichaelDwego · September 3, 2022 at 11:12 pm
[url=https://doxycycline.party/]doxyhexal[/url]
YonCounk · September 3, 2022 at 11:14 pm
[url=https://motilium.fun/]purchase motilium online[/url]
Estebanguall · September 3, 2022 at 11:16 pm
[url=https://zithromax.fun/]zithromax 500mg pills[/url]
TommyHepsy · September 3, 2022 at 11:29 pm
[url=http://duloxetine.cfd/]cymbalta generic cost[/url]
JackCounk · September 3, 2022 at 11:34 pm
[url=https://lasix.fun/]how much is furosemide 40 mg[/url]
Jameseloro · September 3, 2022 at 11:35 pm
[url=https://sildenafil.ink/]viagra capsules in india[/url] [url=https://vardenafil.life/]cheap levitra 10mg[/url] [url=https://mebendazole.xyz/]vermox us[/url] [url=https://glucophage.life/]buy metfornin without prescription drugs online[/url]
JosephMaict · September 3, 2022 at 11:37 pm
[url=http://clonidine.fun/]clonidine 0.3 mg[/url] [url=http://cialisktabs.quest/]cialis 5mg daily use[/url] [url=http://viagraetab.quest/]viagra online order india[/url]
Michaelemult · September 3, 2022 at 11:39 pm
[url=https://disulfiram.fun/]disulfiram 500 mg price[/url]
JaneCounk · September 3, 2022 at 11:42 pm
[url=http://celecoxib.fun/]buy celebrex[/url]
DavisMug · September 4, 2022 at 12:11 am
[url=https://doxycycline.party/]doxycycline online pharmacy[/url]
JackCounk · September 4, 2022 at 12:18 am
[url=https://strattera.today/]generic strattera 2017[/url]
TedCounk · September 4, 2022 at 12:41 am
[url=https://azithromycin.business/]buy azithromycin online australia[/url]
MichaelGuabe · September 4, 2022 at 12:46 am
[url=http://disulfiram.site/]antabuse disulfiram[/url]
Michaeldrist · September 4, 2022 at 12:46 am
[url=http://bupropion.cfd/]cheapest bupropion[/url]
Michaeldrist · September 4, 2022 at 12:49 am
[url=http://femaleviagra.monster/]can i buy sildenafil citrate[/url]
MarkCounk · September 4, 2022 at 12:50 am
[url=https://ampicillin.life/]ampicillin 500mg capsules price[/url]
JasonCounk · September 4, 2022 at 12:53 am
[url=https://zofran.fun/]zofran daily[/url]
IvyCounk · September 4, 2022 at 1:02 am
[url=http://anafranil.site/]anafranil 75 mg price[/url] [url=http://ampicillin.life/]ampicillin 100[/url]
RicIsose · September 4, 2022 at 1:04 am
[url=http://cialisetabs.monster/]cialis pills for sale in canada[/url] [url=http://ciprofloxacin.xyz/]cipro 500 mg pills[/url] [url=http://zoloft.ink/]zoloft online without prescription[/url] [url=http://tadacip.fun/]tadacip 10 mg price[/url] [url=http://duloxetine.xyz/]cymbalta drug coupon[/url] [url=http://avodart.site/]buy avodart australia[/url] [url=http://cialismtabs.monster/]buy cialis brand[/url]
BooCounk · September 4, 2022 at 1:14 am
[url=https://hydroxychloroquine.boutique/]plaquenil 400mg[/url]
MarkCounk · September 4, 2022 at 1:20 am
[url=https://cialisrtab.monster/]where can i get cialis over the counter[/url]
LisaCounk · September 4, 2022 at 1:36 am
[url=https://cialisrtab.monster/]cialis buy online usa[/url]
CarlCounk · September 4, 2022 at 1:47 am
[url=http://silagra.fun/]silagra 100 mg sale[/url]
JasonCounk · September 4, 2022 at 1:57 am
[url=https://azithromycin.business/]amoxicillin azithromycin[/url]
TeoCounk · September 4, 2022 at 2:20 am
[url=https://hydroxychloroquine.tech/]plaquenil 800mg[/url]
MaryCounk · September 4, 2022 at 2:20 am
[url=https://zithromax.site/]how much is azithromycin in mexico[/url] [url=https://lisinopril.media/]lisinopril 3760[/url]
RichardFaply · September 4, 2022 at 2:25 am
[url=https://hydroxychloroquine.download/]hydroxychloroquine nz[/url] [url=https://neurontin.click/]order neurontin over the counter[/url] [url=https://cialisetabs.monster/]best price for cialis 10mg[/url] [url=https://glucophage.life/]buy metformin online no prescription[/url] [url=https://azithromycin.ink/]azithromycin cheapest price[/url] [url=https://wellbutrin.fun/]150 mg bupropion[/url]
IvyCounk · September 4, 2022 at 2:25 am
[url=http://doxycycline.joburg/]doxycycline 20 mg capsules[/url] [url=http://amoxicillin.joburg/]augmentin 375 price in india[/url]
IvyCounk · September 4, 2022 at 2:39 am
[url=http://silagra.xyz/]buy silagra in australia[/url] [url=http://dexamethasone.fun/]can i buy dexamethasone over the counter[/url] [url=http://viagraftab.quest/]online viagra coupon[/url] [url=http://prozac.capetown/]fluoxetine without prescription[/url] [url=http://vardenafil.live/]buy brand name levitra[/url] [url=http://ampicillin.life/]ampicillin brand name in usa[/url] [url=http://trimox.xyz/]augmentin 87[/url] [url=http://silagra.fun/]cheap silagra uk[/url]
WimCounk · September 4, 2022 at 2:39 am
[url=http://citalopram.boutique/]citalopram 10mg online[/url]
AshCounk · September 4, 2022 at 3:11 am
[url=https://singulair.site/]singulair asthma[/url] [url=https://buyproscar.store/]where to buy proscar online[/url] [url=https://doxycyclina.online/]doxycycline prescription discount[/url] [url=https://safepharmx.com/]buy nolvadex online pharmacy[/url] [url=https://benicar.boutique/]benicar 80 mg daily[/url] [url=https://cephalexintab.online/]keflex 750 mg[/url]
JosephMaict · September 4, 2022 at 3:13 am
[url=http://cialismtabs.monster/]cialis 10mg price canada[/url] [url=http://duloxetine.cfd/]cymbalta from canada[/url] [url=http://disulfiram.site/]anti buse pills[/url]
LisaCounk · September 4, 2022 at 3:13 am
[url=https://onlinedrugstore.xyz/]indianpharmacy com[/url]
ElwoodGon · September 4, 2022 at 3:21 am
[url=http://viagraetab.quest/]genuine viagra online uk[/url]
MarvinZem · September 4, 2022 at 3:26 am
[url=http://chloroquine.fun/]chloroquine 250 mg[/url]
AmyCounk · September 4, 2022 at 3:37 am
[url=http://lasix.boutique/]lasix 40 mg[/url]
SueCounk · September 4, 2022 at 3:40 am
[url=http://arimidex.cfd/]arimidex for men[/url]
CarlCounk · September 4, 2022 at 3:55 am
[url=http://onlinedrugstore.digital/]cheapest pharmacy for prescription drugs[/url]
JimCounk · September 4, 2022 at 3:56 am
[url=https://toradol.today/]medicine toradol 10mg[/url]
JasonCounk · September 4, 2022 at 4:06 am
[url=https://bupropion.site/]bupropion sale[/url]
TedCounk · September 4, 2022 at 4:39 am
[url=https://escitalopram.cfd/]50mg lexapro[/url]
DarrylSef · September 4, 2022 at 4:47 am
[url=http://disulfiram.fun/]buy antabuse 250 mg[/url] [url=http://bupropion.cfd/]wellbutrin where to buy[/url] [url=http://metformin.moscow/]metformin 25 mg[/url] [url=http://propranolol.life/]propranolol online uk[/url] [url=http://celebrex.sbs/]canadian pharmacy celebrex[/url] [url=http://femaleviagra.monster/]discount online pharmacy viagra[/url] [url=http://neurontin.fun/]no prescription gabapentin[/url]
LisaCounk · September 4, 2022 at 4:57 am
[url=https://doxycycline.joburg/]buy doxycycline pills online[/url]
AmyCounk · September 4, 2022 at 5:01 am
[url=http://cialisrtab.monster/]cheap generic cialis canada[/url]
AmyCounk · September 4, 2022 at 5:16 am
[url=http://lisinopril.media/]lisinopril india price[/url]
ZakCounk · September 4, 2022 at 5:20 am
[url=https://celecoxib.fun/]celebrex rx[/url] [url=https://lasix.boutique/]lasix daily[/url]
NickCounk · September 4, 2022 at 5:21 am
[url=http://strattera.click/]generic strattera prices[/url]
Michaelemult · September 4, 2022 at 5:34 am
[url=https://metformin.wiki/]buy metformin 1000 mg uk[/url]
EvaCounk · September 4, 2022 at 5:36 am
[url=http://viagraftab.quest/]order viagra online cheap[/url]
Curtisvibia · September 4, 2022 at 5:53 am
[url=https://tadacip.fun/]tadacip online[/url]
Michaelemult · September 4, 2022 at 5:57 am
[url=https://metformin.moscow/]cost of brand name glucophage[/url]
DavisMug · September 4, 2022 at 6:02 am
[url=https://valtrex.site/]valtrex 1500 mg[/url]
MarkCounk · September 4, 2022 at 6:02 am
[url=https://toradol.today/]toradol drug[/url]
JudyCounk · September 4, 2022 at 6:05 am
[url=http://motilium.fun/]buy motilium uk[/url]
PaulCounk · September 4, 2022 at 6:08 am
[url=https://effexor.life/]effexor xr 300 mg[/url]
Edgarlor · September 4, 2022 at 6:17 am
[url=https://cialisetabs.monster/]cialis generic medication[/url]
ZakCounk · September 4, 2022 at 6:21 am
[url=https://sildalis.sbs/]sildalis canada[/url] [url=https://bactrim.icu/]septra online[/url] [url=https://lisinopril.media/]lisinopril 20 mg no prescription[/url] [url=https://onlinedrugstore.digital/]canadian pharmacy world coupon[/url]
Charlesaduse · September 4, 2022 at 6:25 am
[url=http://azithromycin.ink/]cheap azithromycin online[/url]
UgoCounk · September 4, 2022 at 6:28 am
[url=http://suhagra.agency/]buy suhagra tablet[/url]
Davidhup · September 4, 2022 at 6:34 am
[url=http://doxycycline.party/]doxycycline drug[/url]
JoeCounk · September 4, 2022 at 6:36 am
[url=https://lasix.fun/]canadian pharmacy lasix[/url] [url=https://clomid.network/]clomid from mexico[/url] [url=https://viagraftab.quest/]how much is sildenafil[/url] [url=https://onlinedrugstore.fun/]safe online pharmacy[/url] [url=https://onlinedrugstore.digital/]reputable online pharmacy[/url] [url=https://zithromax.site/]azithromycin 500mg lowest price online[/url]
SueCounk · September 4, 2022 at 6:44 am
[url=http://anafranil.site/]anafranil online[/url]
IvyCounk · September 4, 2022 at 7:11 am
[url=http://clomid.network/]clomid tablets price in south africa[/url] [url=http://toradol.today/]toradol migraine[/url] [url=http://tenormin.fun/]atenolol 50 mg tab[/url] [url=http://arimidex.cfd/]arimidex 20 mg[/url] [url=http://doxycycline.fun/]buy doxycycline mexico[/url]
JosephMaict · September 4, 2022 at 7:20 am
[url=http://valtrex.site/]cheap generic valtrex[/url] [url=http://viagraetab.quest/]can you buy viagra over the counter canada[/url]
MiclTek · September 4, 2022 at 7:39 am
[url=http://gabapentin.site/]gabapentin order online[/url]
MiaCounk · September 4, 2022 at 7:40 am
[url=http://onlinedrugstore.digital/]canadian family pharmacy[/url]
Michaeldrist · September 4, 2022 at 7:44 am
[url=http://neurontin.fun/]neurontin oral[/url]
SueCounk · September 4, 2022 at 7:49 am
[url=http://escitalopram.cfd/]125mg lexapro[/url]
UgoCounk · September 4, 2022 at 8:03 am
[url=http://celebrex.digital/]celebrex uk cost[/url]
Michaelemult · September 4, 2022 at 8:16 am
[url=https://wellbutrin.fun/]wellbutrin generic cost[/url]
TeoCounk · September 4, 2022 at 8:18 am
[url=https://prozac.capetown/]fluoxetine price in india[/url]
SueCounk · September 4, 2022 at 8:23 am
[url=http://trimox.xyz/]amoxicillin capsules 250mg[/url]
DenCounk · September 4, 2022 at 8:23 am
[url=https://tenormin.fun/]generic tenormin[/url]
AshCounk · September 4, 2022 at 8:25 am
[url=https://sildalis1.com/]sildalis[/url] [url=https://arimidex.store/]arimidex 1mg price[/url]
Michaeldrist · September 4, 2022 at 8:25 am
[url=http://doxycycline.party/]no prescription doxycycline[/url]
CarlCounk · September 4, 2022 at 8:27 am
[url=http://motilium.fun/]where can you buy motilium[/url]
Estebanguall · September 4, 2022 at 8:50 am
[url=https://viagraptab.quest/]cheap sildenafil citrate uk[/url]
TimothyThive · September 4, 2022 at 8:52 am
[url=http://benicar.site/]cost of generic benicar[/url]
RodneyTab · September 4, 2022 at 8:59 am
[url=https://neurontin.click/]gabapentin for sale uk[/url]
EyeCounk · September 4, 2022 at 8:59 am
[url=https://lisinopril.media/]lisinopril 1 mg tablet[/url] [url=https://clomid.site/]clomid 50mg uk[/url] [url=https://atarax.click/]atarax 40 mg[/url] [url=https://strattera.click/]strattera australia[/url] [url=https://isotretinoin.fun/]how to get accutane over the counter[/url]
JosephMaict · September 4, 2022 at 8:59 am
[url=http://chloroquine.fun/]buy chloroquine phosphate online[/url] [url=http://hydroxychloroquine.mom/]hydroxychloroquine 10 price[/url] [url=http://viagraetab.quest/]viagra canadian pharmacy generic[/url] [url=http://disulfiram.site/]antabus[/url] [url=http://sildenafil.ink/]buy sildenafil online[/url] [url=http://trazodone.media/]100 mg trazodone[/url] [url=http://robaxin.site/]robaxin otc usa[/url] [url=http://zithromax.fun/]azithromycin uk[/url]
Edgarlor · September 4, 2022 at 9:11 am
[url=https://biaxin.fun/]biaxin antibiotic[/url]
KimCounk · September 4, 2022 at 9:15 am
[url=https://motilium.fun/]motilium prescription[/url]
PaulCounk · September 4, 2022 at 9:17 am
[url=https://amoxicillin.joburg/]augmentin 875 125 mg tablet[/url]
MichaelDwego · September 4, 2022 at 9:26 am
[url=https://duloxetine.cfd/]cymbalta 382[/url]
PaulCounk · September 4, 2022 at 9:27 am
[url=https://clomid.network/]clomid pharmacy uk[/url]
BooCounk · September 4, 2022 at 9:34 am
[url=https://arimidex.works/]average price of arimidex[/url]
RodneyTab · September 4, 2022 at 9:35 am
[url=https://hydroxychloroquine.download/]plaquenil tablets 200mg[/url]
JaneCounk · September 4, 2022 at 9:45 am
[url=http://erectafil.fun/]erectafil 40[/url]
RodneyTab · September 4, 2022 at 9:54 am
[url=https://duloxetine.cfd/]best price for cymbalta[/url]
JudyCounk · September 4, 2022 at 10:06 am
[url=http://silagra.xyz/]silagra online india[/url]
JaneCounk · September 4, 2022 at 10:11 am
[url=http://lasix.fun/]lasix 30 mg tablets[/url]
MichaelGuabe · September 4, 2022 at 10:24 am
[url=http://neurontin.fun/]buy gabapentin no prescription[/url]
JaneCounk · September 4, 2022 at 10:30 am
[url=http://amoxil.fun/]amoxicillin 250 mg capsule[/url]
TommyHepsy · September 4, 2022 at 10:31 am
[url=http://azithromycin.ink/]generic zithromax buy online[/url]
MarkCounk · September 4, 2022 at 10:33 am
[url=https://lasix.fun/]furosemide without a prescription[/url]
Curtisvibia · September 4, 2022 at 10:34 am
[url=https://permethrin.xyz/]generic elimite[/url]
JimCounk · September 4, 2022 at 10:36 am
[url=https://arimidex.cfd/]online pharmacy arimidex[/url]
JaneCounk · September 4, 2022 at 10:38 am
[url=http://vardenafil.live/]where to buy generic levitra[/url]
DarrylSef · September 4, 2022 at 10:39 am
[url=http://glucophage.life/]metformin how to get[/url] [url=http://avodart.site/]avodart 0.55 mg[/url] [url=http://cialisrtabs.quest/]cialis without prescriptions[/url] [url=http://zoloft.ink/]buy zoloft online canada[/url] [url=http://cialisetabs.monster/]tadalafil purchase online[/url] [url=http://femaleviagra.monster/]generic viagra 2018[/url] [url=http://viagraetab.quest/]best price for viagra[/url]
ZakCounk · September 4, 2022 at 10:43 am
[url=https://lasix.fun/]furosemide 40 mg cheap[/url] [url=https://lasix.boutique/]lasix 120 mg daily[/url]
RichardFaply · September 4, 2022 at 10:48 am
[url=https://hydroxychloroquine.mom/]plaquenil 40 mg[/url] [url=https://diflucan.fun/]canadian order diflucan online[/url] [url=https://cialisrtabs.quest/]generic cialis canada[/url]
MiclTek · September 4, 2022 at 10:50 am
[url=http://disulfiram.fun/]antabuse-the no drinking drug[/url]
IvyCounk · September 4, 2022 at 11:07 am
[url=http://prozac.capetown/]fluoxetine 40 mg price[/url] [url=http://budesonide.fun/]budecort 100[/url] [url=http://erectafil.fun/]buy erectafil 20[/url] [url=http://anafranil.site/]anafranil generic price[/url]
MarkCounk · September 4, 2022 at 11:12 am
[url=https://viagraftab.quest/]buy generic viagra canada[/url]
Michaelemult · September 4, 2022 at 11:13 am
[url=https://vardenafil.life/]levitra over the counter[/url]
MiclTek · September 4, 2022 at 11:20 am
[url=http://chloroquine.fun/]chloroquine prescription[/url]
JaneCounk · September 4, 2022 at 11:45 am
[url=http://doxycycline.joburg/]doxycycline 250 mg tabs[/url]
RodneyTab · September 4, 2022 at 11:51 am
[url=https://vardenafil.life/]pharmacy prescription levitra[/url]
Estebanguall · September 4, 2022 at 11:53 am
[url=https://hydroxychloroquine.mom/]plaquenil 40 mg[/url]
Estebanguall · September 4, 2022 at 11:57 am
[url=https://zithromax.fun/]zithromax generic cost[/url]
RodneyTab · September 4, 2022 at 12:05 pm
[url=https://metformin.wiki/]glucophage 500 mg tablet[/url]
UgoCounk · September 4, 2022 at 12:07 pm
[url=http://triamterenegen.com/]triamterene brand name[/url]
TommyHepsy · September 4, 2022 at 12:09 pm
[url=http://mebendazole.xyz/]vermox over the counter[/url]
MiclTek · September 4, 2022 at 12:13 pm
[url=http://neurontin.fun/]gabapentin 100[/url]
MiclTek · September 4, 2022 at 12:22 pm
[url=http://metformin.wiki/]metformin 500mg tablets[/url]
RodneyTab · September 4, 2022 at 12:23 pm
[url=https://gabapentin.site/]gabapentin 400 mg cost[/url]
AshCounk · September 4, 2022 at 12:29 pm
[url=https://zyban.boutique/]450 wellbutrin[/url] [url=https://finasteride.wtf/]finasteride pills[/url]
RichardFaply · September 4, 2022 at 12:31 pm
[url=https://zoloft.ink/]zoloft 75[/url] [url=https://vardenafil.life/]vardenafil discount[/url] [url=https://disulfiram.fun/]cheapest antabuse[/url] [url=https://zithromax.fun/]zithromax 250 capsules[/url] [url=https://propranolol.life/]medicine inderal 40[/url]
MarvinZem · September 4, 2022 at 12:33 pm
[url=http://robaxin.site/]can you buy robaxin over the counter in canada[/url]
Charlesaduse · September 4, 2022 at 12:41 pm
[url=http://femaleviagra.monster/]real female viagra[/url]
RicIsose · September 4, 2022 at 12:42 pm
[url=http://tizanidine.xyz/]zanaflex 4 mg tablet[/url] [url=http://zithromax.fun/]azithromycin 250 price[/url] [url=http://allopurinol.site/]allopurinol generic 300 mg[/url] [url=http://celebrex.sbs/]celebrex 2016[/url] [url=http://cialismtabs.monster/]best online pharmacy tadalafil[/url] [url=http://gabapentin.site/]neurontin 2400 mg[/url]
Davidhup · September 4, 2022 at 12:46 pm
[url=http://tizanidine.xyz/]cost tizanidine[/url]
WimCounk · September 4, 2022 at 1:06 pm
[url=http://avodart.guru/]avodart brand name[/url]
KiaCounk · September 4, 2022 at 1:12 pm
[url=https://vardenafil.live/]discount levitra[/url]
TedCounk · September 4, 2022 at 1:14 pm
[url=https://silagra.fun/]silagra 100 price in india[/url]
AmyCounk · September 4, 2022 at 1:15 pm
[url=http://silagra.xyz/]silagra 100 online[/url]
MarkCounk · September 4, 2022 at 1:20 pm
[url=https://atarax.click/]atarax tablet price in india[/url]
Michaeldrist · September 4, 2022 at 1:34 pm
[url=http://biaxin.fun/]biaxin 500 mg price[/url]
JaneCounk · September 4, 2022 at 1:38 pm
[url=http://amoxicillin.joburg/]augmentin 1500[/url]
MarvinZem · September 4, 2022 at 1:44 pm
[url=http://lexapro.sbs/]where can i buy cipralex[/url]
RobertFoold · September 4, 2022 at 1:47 pm
[url=https://avodart.site/]generic avodart price[/url]
Charlesaduse · September 4, 2022 at 1:49 pm
[url=http://mebendazole.xyz/]vermox price in india[/url]
Charlesaduse · September 4, 2022 at 1:55 pm
[url=http://metformin.moscow/]metformin 500 mg[/url]
ZakCounk · September 4, 2022 at 2:02 pm
[url=https://isotretinoin.fun/]buy generic accutane online[/url] [url=https://bupropion.site/]bupropion tablet price in india[/url] [url=https://accutane.site/]buy accutane 5mg[/url] [url=https://sildalis.sbs/]buy cheap sildalis[/url] [url=https://viagraftab.quest/]pinkviagraforwomen[/url] [url=https://erectafil.fun/]buy erectafil[/url] [url=https://onlinedrugstore.fun/]canadian pharmacy drugs online[/url]
IvyCounk · September 4, 2022 at 2:07 pm
[url=http://gabapentin.xyz/]gabapentin 1200 mg[/url] [url=http://onlinedrugstore.fun/]non prescription medicine pharmacy[/url] [url=http://cephalexin.xyz/]keflex europe[/url] [url=http://viagraftab.quest/]viagra rx cost[/url] [url=http://onlinedrugstore.xyz/]pharmacy online track order[/url] [url=http://cialisitabs.quest/]buy generic cialis online from india[/url] [url=http://sildalis.sbs/]buy sildalis[/url] [url=http://silagra.xyz/]silagra 100 price[/url]
ElwoodGon · September 4, 2022 at 2:11 pm
[url=http://bactrim.site/]bactrim order online[/url]
NickCounk · September 4, 2022 at 2:15 pm
[url=http://onlinedrugstore.digital/]canadian pharmacy com[/url]
AnnaCounk · September 4, 2022 at 2:20 pm
[url=http://albendazole.sbs/]albendazole coupon[/url]
Curtisvibia · September 4, 2022 at 2:30 pm
[url=https://doxycycline.party/]doxycycline 2984[/url]
BooCounk · September 4, 2022 at 2:38 pm
[url=https://arimidex.works/]buy arimidex nz[/url]
Jameseloro · September 4, 2022 at 2:41 pm
[url=https://zithromax.fun/]zithromax 250 mg price[/url] [url=https://clonidine.fun/]clonidine 75 mcg[/url] [url=https://azithromycin.ink/]azithromycin price in india[/url] [url=https://duloxetine.xyz/]cymbalta generic 60 mg[/url]
IvyCounk · September 4, 2022 at 2:45 pm
[url=http://budesonide.fun/]budesonide 9 mg tablets cost[/url] [url=http://anafranil.site/]anafranil clomipramine[/url] [url=http://onlinedrugstore.fun/]online pharmacy viagra[/url] [url=http://strattera.today/]buy strattera uk[/url] [url=http://viagraftab.quest/]how to get generic viagra online[/url] [url=http://strattera.click/]buy strattera without prescription[/url]
KiaCounk · September 4, 2022 at 2:47 pm
[url=https://toradol.today/]toradol pill 10mg[/url]
ElwoodGon · September 4, 2022 at 2:49 pm
[url=http://femaleviagra.monster/]viagra 75 mg price[/url]
BooCounk · September 4, 2022 at 2:50 pm
[url=https://levaquin.guru/]levofloxacin[/url]
Michaeldrist · September 4, 2022 at 2:51 pm
[url=http://benicar.site/]308186793 benicar[/url]
TimothyThive · September 4, 2022 at 2:59 pm
[url=http://permethrin.xyz/]acticin tablet[/url]
Curtisvibia · September 4, 2022 at 3:08 pm
[url=https://benicar.site/]benicar 40 25 mg[/url]
SamCounk · September 4, 2022 at 3:30 pm
[url=http://cephalexin.xyz/]buy keflex online uk[/url] [url=http://atarax.click/]atarax uk otc[/url] [url=http://prednisone.fun/]prednisone otc[/url] [url=http://lasix.boutique/]vip medications buy lasix without prescription[/url] [url=http://trimox.xyz/]amoxicillin 500 mg pill[/url] [url=http://vardenafil.live/]how to get levitra prescription[/url]
TommyHepsy · September 4, 2022 at 3:32 pm
[url=http://bactrim.site/]bactrim 960 mg[/url]
MichaelDwego · September 4, 2022 at 3:56 pm
[url=https://tizanidine.xyz/]zanaflex for anxiety[/url]
KiaCounk · September 4, 2022 at 3:59 pm
[url=https://zofran.fun/]zofran otc price[/url]
TeoCounk · September 4, 2022 at 4:09 pm
[url=https://doxycycline.fun/]doxycycline prescription price[/url]
AmyCounk · September 4, 2022 at 4:12 pm
[url=http://lexapro.today/]lexapro over the counter[/url]
ElwoodGon · September 4, 2022 at 4:12 pm
[url=http://biaxin.fun/]biaxin for ear infection[/url]
MiclTek · September 4, 2022 at 4:13 pm
[url=http://avodart.site/]avodart price south africa[/url]
Jameseloro · September 4, 2022 at 4:51 pm
[url=https://tizanidine.xyz/]zanaflex cost[/url] [url=https://mebendazole.xyz/]purchase vermox[/url] [url=https://valtrex.site/]buy valtrex 1000 mg[/url]
IvyCounk · September 4, 2022 at 4:56 pm
[url=http://onlinedrugstore.digital/]cheapest pharmacy prescription drugs[/url] [url=http://atarax.click/]atarax tablet 10 mg[/url] [url=http://prednisone.fun/]prednisone 4mg[/url] [url=http://vardenafil.live/]20 mg levitra[/url] [url=http://strattera.today/]strattera order[/url] [url=http://levothyroxine.site/]where to get synthroid[/url] [url=http://toradol.today/]toradol for dogs[/url]
Jameseloro · September 4, 2022 at 5:01 pm
[url=https://tadacip.fun/]tadacip pills 20 mg[/url] [url=https://chloroquine.fun/]chloroquine otc[/url] [url=https://robaxin.site/]robaxin otc canada[/url] [url=https://glucophage.life/]metformin 500 mg coupon[/url] [url=https://zithromax.fun/]1g azithromycin for sale[/url] [url=https://lexapro.sbs/]cost generic lexapro 2017[/url] [url=https://cialisetabs.monster/]cyalis[/url]
NickCounk · September 4, 2022 at 5:19 pm
[url=http://viagraftab.quest/]buy generic viagra online canada[/url]
WimCounk · September 4, 2022 at 5:28 pm
[url=http://fluoxetine.cfd/]buy fluoxetine online without prescription[/url]
ZakCounk · September 4, 2022 at 5:36 pm
[url=https://cialisrtab.monster/]viagra cialis online[/url] [url=https://levothyroxine.site/]synthroid generic price[/url] [url=https://isotretinoin.fun/]accutane where to get[/url]
YonCounk · September 4, 2022 at 5:57 pm
[url=https://prednisone.fun/]apo prednisone[/url]
WilliamWem · September 4, 2022 at 6:08 pm
[url=https://tadacip.fun/]canadian pharmacy tadacip[/url] [url=https://glucophage.life/]metformin nz[/url]
AlanCounk · September 4, 2022 at 6:18 pm
[url=http://toradol.today/]toradol nasal spray[/url] [url=http://lasix.boutique/]buy lasix tablets[/url] [url=http://onlinedrugstore.fun/]pharmacy websites[/url]
MiaCounk · September 4, 2022 at 6:29 pm
[url=http://silagra.xyz/]silagra online[/url]
JoeCounk · September 4, 2022 at 6:31 pm
[url=https://anafranil.site/]anafranil sale[/url] [url=https://doxycycline.fun/]doxyhexal[/url]
MaryCounk · September 4, 2022 at 6:34 pm
[url=https://lexapro.today/]buy generic lexapro[/url] [url=https://clomid.network/]clomid for sale in usa[/url] [url=https://silagra.fun/]silagra india[/url] [url=https://cialisrtab.monster/]buy online cialis canada[/url] [url=https://levothyroxine.site/]buy synthroid online without prescription[/url] [url=https://celecoxib.fun/]celebrex 200 mg discount[/url]
Curtisvibia · September 4, 2022 at 6:39 pm
[url=https://bactrim.site/]bactrim 160[/url]
KiaCounk · September 4, 2022 at 6:55 pm
[url=https://zithromax.site/]azithromycin 500 mg tablet price india[/url]
JimCounk · September 4, 2022 at 7:07 pm
[url=https://viagraftab.quest/]where can i buy female viagra pill[/url]
TeoCounk · September 4, 2022 at 7:09 pm
[url=https://dexamethasone.fun/]dexamethasone cost usa[/url]
AlanCounk · September 4, 2022 at 7:21 pm
[url=http://sildalis.sbs/]sildalis 100mg 20mg[/url] [url=http://onlinedrugstore.digital/]canadian pharmacy 24h com[/url] [url=http://clomid.site/]clomid pills buy[/url] [url=http://silagra.xyz/]silagra canada[/url] [url=http://prozac.capetown/]prozac 2019[/url] [url=http://atarax.click/]atarax 75 mg[/url] [url=http://lexapro.today/]lexapro[/url] [url=http://amoxicillin.joburg/]where to get amoxicillin over the counter[/url]
TeoCounk · September 4, 2022 at 7:21 pm
[url=https://lasix.fun/]can you buy lasix over the counter[/url]
Edgarlor · September 4, 2022 at 7:23 pm
[url=https://ciprofloxacin.xyz/]how to get cipro without a prescription[/url]
JoeCounk · September 4, 2022 at 7:24 pm
[url=https://tenormin.fun/]buy atenolol 50 mg uk[/url] [url=https://zofran.fun/]zofran generic pill[/url] [url=https://lasix.boutique/]lasix medication over the counter[/url] [url=https://doxycycline.joburg/]doxycycline purchase[/url]
IvyCounk · September 4, 2022 at 7:43 pm
[url=http://clomid.network/]clomid price uk[/url] [url=http://sildalis.sbs/]buy sildalis 120 mg[/url] [url=http://dexamethasone.fun/]dexamethasone 20 mg[/url] [url=http://accutane.site/]where can you get accutane[/url] [url=http://amoxicillin.joburg/]augmentin 457 price[/url] [url=http://doxycycline.joburg/]cost of generic doxycycline[/url] [url=http://lexapro.today/]lexapro[/url]
MarvinZem · September 4, 2022 at 7:43 pm
[url=http://zithromax.fun/]where to buy azithromycin[/url]
MiaCounk · September 4, 2022 at 7:44 pm
[url=http://arimidex.cfd/]online prescription arimidex[/url]
SueCounk · September 4, 2022 at 8:03 pm
[url=http://zithromax.site/]zithromax 1500 mg[/url]
RichardFaply · September 4, 2022 at 8:21 pm
[url=https://viagraptab.quest/]viagra 25 mg coupon[/url] [url=https://hydroxychloroquine.mom/]plaquenil retinal toxicity[/url] [url=https://metformin.moscow/]250 mg metformin[/url]
Jameseloro · September 4, 2022 at 8:29 pm
[url=https://mebendazole.cfd/]vermox medicine[/url] [url=https://benicar.site/]benicar 20 cost[/url]
RicIsose · September 4, 2022 at 8:40 pm
[url=http://disulfiram.fun/]disulfiram australia[/url] [url=http://propecia.moscow/]generic propecia australia[/url] [url=http://cialisktabs.quest/]purchase cheap cialis soft tabs[/url]
JosephMaict · September 4, 2022 at 8:42 pm
[url=http://hydroxychloroquine.mom/]generic for plaquenil[/url] [url=http://cialisrtabs.quest/]cost cialis 5 mg[/url]
RodneyTab · September 4, 2022 at 8:45 pm
[url=https://zithromax.fun/]buy zithromax online without prescription[/url]
CarlCounk · September 4, 2022 at 9:39 pm
[url=http://trimox.xyz/]where to get amoxicillin[/url]
MarkCounk · September 4, 2022 at 9:45 pm
[url=https://clomid.site/]how can i get clomid online[/url]
KimCounk · September 4, 2022 at 9:52 pm
[url=https://levothyroxine.site/]buy synthroid 75 mcg[/url]
Jameseloro · September 4, 2022 at 9:55 pm
[url=https://azithromycin.ink/]cost of zithromax medicine[/url] [url=https://tizanidine.xyz/]zanaflex cost[/url] [url=https://sildenafil.ink/]cost of viagra 100mg in australia[/url] [url=https://metformin.moscow/]can you buy metfromin without a prescription[/url]
Jameseloro · September 4, 2022 at 10:00 pm
[url=https://robaxin.site/]robaxin 8 mg daily[/url] [url=https://neurontin.fun/]best price for gabapentin 300 mg[/url] [url=https://biaxin.fun/]biaxin cream[/url]
JasonCounk · September 4, 2022 at 10:06 pm
[url=https://doxycycline.joburg/]doxycycline 50mg capsules[/url]
Estebanguall · September 4, 2022 at 10:11 pm
[url=https://disulfiram.site/]where can you buy antabuse[/url]
MarvinZem · September 4, 2022 at 10:21 pm
[url=http://hydroxychloroquine.mom/]plaquenil eye damage[/url]
JosephMaict · September 4, 2022 at 10:28 pm
[url=http://propecia.moscow/]finasteride 1mg for sale[/url] [url=http://valtrex.site/]buy valtrex tablets[/url] [url=http://zoloft.ink/]zoloft drug[/url] [url=http://duloxetine.cfd/]cymbalta price 60 mg[/url] [url=http://mebendazole.cfd/]vermox tablets nz[/url] [url=http://wellbutrin.fun/]bupropion 100mg tablets[/url] [url=http://femaleviagra.monster/]female viagra online uk[/url] [url=http://benicar.site/]benicar online no prescription[/url]
SueCounk · September 4, 2022 at 10:32 pm
[url=http://zofran.fun/]zofran canada pharmacy[/url]
IvyCounk · September 4, 2022 at 10:45 pm
[url=http://albendazole.sbs/]albendazole tablet india[/url] [url=http://lisinopril.media/]lisinopril 20 mg brand name[/url] [url=http://prozac.capetown/]fluoxetine 5 mg tablets[/url] [url=http://lasix.fun/]buy cheap lasix[/url] [url=http://gabapentin.xyz/]50 mg gabapentin[/url] [url=http://amoxicillin.joburg/]amoxicillin tablets[/url] [url=http://onlinedrugstore.xyz/]canadian pharmacy antibiotics[/url] [url=http://toradol.today/]30 mg toradol[/url]
MichaelGuabe · September 4, 2022 at 10:46 pm
[url=http://allopurinol.site/]allopurinol 10 mg tablet[/url]
JimCounk · September 4, 2022 at 10:55 pm
[url=https://budesonide.fun/]budesonide cost usa[/url]
DarrylSef · September 4, 2022 at 11:01 pm
[url=http://duloxetine.xyz/]cymbalta coupon canada[/url] [url=http://albenza.xyz/]where can i get albendazole[/url] [url=http://hydroxychloroquine.mom/]hydroxychloroquine 100mg[/url] [url=http://zoloft.ink/]zoloft 75 mg tablet[/url] [url=http://wellbutrin.fun/]buy wellbutrin[/url] [url=http://disulfiram.fun/]can you buy antabuse over the counter in south africa[/url] [url=http://cialisktabs.quest/]cialis over the counter in canada[/url]
JaneCounk · September 4, 2022 at 11:23 pm
[url=http://lexapro.today/]lexapro 100mg tablets[/url]
SueCounk · September 4, 2022 at 11:31 pm
[url=http://hydroxychloroquine.tech/]buy quineprox[/url]
AshCounk · September 4, 2022 at 11:38 pm
[url=https://molnupiravir.us.org/]merck pill[/url] [url=https://tretinoin.cyou/]retin a tretinoin cream 0.05[/url] [url=https://tabssale.com/]where to buy nitrofurantoin[/url] [url=https://retinatretinoincream.com/]buy retin a from canada[/url] [url=https://levitragenuine.com/]levitra 10 mg price[/url] [url=https://fluoxetine.cfd/]fluoxetine 40 mg capsules[/url] [url=https://diflucan.email/]buy diflucan yeast infection[/url] [url=https://cialisotab.monster/]cialis 25 mg price[/url]
Davidhup · September 4, 2022 at 11:42 pm
[url=http://duloxetine.cfd/]cymbalta 300 mg[/url]
MiclTek · September 4, 2022 at 11:47 pm
[url=http://duloxetine.xyz/]cymbalta 30mg[/url]
ElwoodGon · September 4, 2022 at 11:51 pm
[url=http://tizanidine.xyz/]zanaflex for sale online[/url]
RichardFaply · September 4, 2022 at 11:56 pm
[url=https://zoloft.ink/]can you buy zoloft online[/url] [url=https://vardenafil.life/]levitra sales[/url]
RodneyTab · September 5, 2022 at 12:02 am
[url=https://allopurinol.site/]purchase allopurinol[/url]
Jameseloro · September 5, 2022 at 12:04 am
[url=https://propecia.moscow/]propecia pills over the counter[/url] [url=https://paxil.site/]paxil 2018[/url] [url=https://tadacip.fun/]tadacip 20 prescription[/url] [url=https://vardenafil.life/]vardenafil generic india[/url] [url=https://disulfiram.site/]over the counter antabuse[/url] [url=https://robaxin.site/]methocarbamol robaxin[/url]
Estebanguall · September 5, 2022 at 12:13 am
[url=https://zithromax.fun/]azithromycin 500 mg generic price[/url]
TeoCounk · September 5, 2022 at 12:27 am
[url=https://levothyroxine.site/]costs of synthroid[/url]
Michaelemult · September 5, 2022 at 12:32 am
[url=https://hydroxychloroquine.mom/]hydroxychloroquine sulfate australia[/url]
KimCounk · September 5, 2022 at 12:35 am
[url=https://sildalis.sbs/]sildalis without prescription[/url]
JudyCounk · September 5, 2022 at 12:54 am
[url=http://bupropion.site/]wellbutrin for sale[/url]
Estebanguall · September 5, 2022 at 1:00 am
[url=https://benicar.site/]benicar 20 mg[/url]
Davidhup · September 5, 2022 at 1:07 am
[url=http://benicar.site/]benicar 20 mg cost[/url]
RobertFoold · September 5, 2022 at 1:11 am
[url=https://zoloft.ink/]zoloft online buy[/url]
RobertFoold · September 5, 2022 at 1:20 am
[url=https://mebendazole.xyz/]vermox tablets[/url]
CarlCounk · September 5, 2022 at 1:27 am
[url=http://silagra.xyz/]buy silagra in australia[/url]
Charlesaduse · September 5, 2022 at 1:31 am
[url=http://allopurinol.site/]medication allopurinol[/url]
JackCounk · September 5, 2022 at 1:35 am
[url=https://dexamethasone.fun/]dexamethasone 10[/url]
RichardFaply · September 5, 2022 at 1:39 am
[url=https://neurontin.fun/]gabapentin pill 100mg[/url] [url=https://biaxin.fun/]biaxin 500 mg online[/url]
KiaCounk · September 5, 2022 at 1:43 am
[url=https://lisinopril.media/]buy lisinopril uk[/url]
PaulCounk · September 5, 2022 at 1:47 am
[url=https://amoxicillin.joburg/]price for augmentin[/url]
Charlesaduse · September 5, 2022 at 1:49 am
[url=http://bupropion.cfd/]mexico bupropion 150mg[/url]
YonCounk · September 5, 2022 at 1:54 am
[url=https://isotretinoin.fun/]how can i get accutane[/url]
RichardFaply · September 5, 2022 at 2:01 am
[url=https://cialisetabs.monster/]discount on cialis[/url] [url=https://duloxetine.xyz/]cymbalta cost canada[/url] [url=https://metformin.wiki/]best price metformin[/url]
DarrylSef · September 5, 2022 at 2:02 am
[url=http://hydroxychloroquine.download/]quineprox 50[/url] [url=http://cialisrtabs.quest/]tadalafil generic from canada[/url] [url=http://biaxin.fun/]buy biaxin 500 mg[/url]
IvyCounk · September 5, 2022 at 2:04 am
[url=http://erectafil.fun/]erectafil canada[/url] [url=http://motilium.fun/]motilium pills[/url] [url=http://cialisrtab.monster/]how much is prescription cialis[/url] [url=http://doxycycline.joburg/]doxycycline 50 mg[/url] [url=http://prozac.capetown/]fluoxetine rx[/url] [url=http://atarax.click/]atarax hydrochloride[/url]
KiaCounk · September 5, 2022 at 2:12 am
[url=https://strattera.click/]strattera 18 mg price[/url]
JackCounk · September 5, 2022 at 2:22 am
[url=https://clomid.site/]clomid nz[/url]
RicIsose · September 5, 2022 at 2:26 am
[url=http://sildenafil.ink/]sildenafil viagra 100mg[/url] [url=http://avodart.site/]avodart 0.5 mg price[/url] [url=http://mebendazole.cfd/]vermox buy online europe[/url] [url=http://trazodone.media/]trazodone price canada[/url] [url=http://zithromax.fun/]azithromycin 250 mg tablet over the counter[/url] [url=http://diflucan.fun/]where to buy diflucan 1[/url] [url=http://vardenafil.life/]genuine levitra online[/url] [url=http://cialisrtabs.quest/]cialis online without prescription[/url]
Michaelemult · September 5, 2022 at 2:35 am
[url=https://propecia.moscow/]propecia for less[/url]
IvyCounk · September 5, 2022 at 2:36 am
[url=http://bupropion.site/]bupropion online cheap[/url] [url=http://lexapro.today/]lexapro tablets price[/url] [url=http://albendazole.sbs/]albenza[/url]
RodneyTab · September 5, 2022 at 2:37 am
[url=https://vardenafil.life/]vardenafil buy[/url]
PaulCounk · September 5, 2022 at 2:40 am
[url=https://trimox.xyz/]amoxicillin brand name in india[/url]
Samuelraisk · September 5, 2022 at 3:06 am
[url=https://celebrex.sbs/]buy celebrex without prescription[/url]
DenCounk · September 5, 2022 at 3:13 am
[url=https://viagraftab.quest/]viagra pills for sale uk[/url]
TommyHepsy · September 5, 2022 at 3:20 am
[url=http://duloxetine.xyz/]cymbalta prescription uk[/url]
AshCounk · September 5, 2022 at 3:34 am
[url=https://paxilgen.com/]paroxetine 25 mg tablet[/url] [url=https://chloroquine.digital/]chloroquine covid-19[/url] [url=https://vermoxtabs.com/]vermox sale[/url] [url=https://sildalis24.com/]discount sildalis[/url] [url=https://furosemide.digital/]lasix uk buy[/url] [url=https://isotretinoin.shop/]buy cheap accutane uk[/url] [url=https://hydroxychloroquiene.com/]cost of plaquenil in canada[/url] [url=https://trental.shop/]trental online order[/url]
TeoCounk · September 5, 2022 at 3:40 am
[url=https://cialisitabs.quest/]prescription cialis online pharmacy[/url]
MarvinZem · September 5, 2022 at 3:45 am
[url=http://albenza.xyz/]where can i buy albendazole over the counter[/url]
EvaCounk · September 5, 2022 at 3:49 am
[url=http://cephalexin.xyz/]where can i buy keflex[/url]
DenCounk · September 5, 2022 at 4:06 am
[url=https://doxycycline.joburg/]cost of doxycycline[/url]
KiaCounk · September 5, 2022 at 4:12 am
[url=https://atarax.click/]atarax generic[/url]
TimothyThive · September 5, 2022 at 4:15 am
[url=http://disulfiram.fun/]buy antabuse online without a prescription[/url]
MarkCounk · September 5, 2022 at 4:30 am
[url=https://hydroxychloroquine.tech/]hydroxychloroquine coupon[/url]
MiclTek · September 5, 2022 at 4:40 am
[url=http://celebrex.sbs/]where to buy celebrex cheap[/url]
SueCounk · September 5, 2022 at 4:46 am
[url=http://vardenafil.live/]generic vardenafil online[/url]
EyeCounk · September 5, 2022 at 4:47 am
[url=https://doxycycline.joburg/]how to get doxycycline prescription[/url] [url=https://onlinedrugstore.xyz/]canadian pharmacy 365[/url]
ElwoodGon · September 5, 2022 at 4:51 am
[url=http://trazodone.media/]buy trazodone online[/url]
Jameseloro · September 5, 2022 at 4:55 am
[url=https://benicar.site/]benicar hct cost[/url] [url=https://trazodone.media/]trazodone usa[/url] [url=https://doxycycline.party/]buy doxycycline 500mg[/url] [url=https://bactrim.site/]bactrim online without rx[/url]
KimCounk · September 5, 2022 at 5:04 am
[url=https://gabapentin.xyz/]neurontin generic cost[/url]
WimCounk · September 5, 2022 at 5:29 am
[url=http://buyfinasteride.monster/]propecia online pharmacy[/url]
Estebanguall · September 5, 2022 at 5:34 am
[url=https://tizanidine.xyz/]tizanidine 4mg prices[/url]
ElwoodGon · September 5, 2022 at 5:44 am
[url=http://wellbutrin.fun/]can i buy bupropion over the counter[/url]
JaneCounk · September 5, 2022 at 5:57 am
[url=http://hydroxychloroquine.tech/]plaquenil cost canada[/url]
JaneCounk · September 5, 2022 at 5:59 am
[url=http://cephalexin.xyz/]keflex medicine[/url]
JackCounk · September 5, 2022 at 6:03 am
[url=https://cephalexin.xyz/]keflex generic brand[/url]
DarrylSef · September 5, 2022 at 6:24 am
[url=http://cialisrtabs.quest/]buy discount cialis best online[/url] [url=http://disulfiram.fun/]antabuse 400mg tablets[/url] [url=http://tadacip.fun/]buy tadacip 20[/url] [url=http://robaxin.site/]where can you get robaxin[/url] [url=http://cialismtabs.monster/]tadalafil soft tablets 10 mg[/url] [url=http://propecia.moscow/]propecia cost in india[/url] [url=http://albenza.xyz/]albendazole for sale canada[/url] [url=http://zithromax.fun/]azithromycin price south africa[/url]
JudyCounk · September 5, 2022 at 6:25 am
[url=http://arimidex.cfd/]how to get arimidex[/url]
AshCounk · September 5, 2022 at 6:26 am
[url=https://chloroquine.guru/]chloroquine 900 mg[/url] [url=https://inderal.guru/]propranolol 160 mg coupon[/url] [url=https://buysildalis.monster/]sildalis india[/url] [url=https://modafinil.golf/]provigil online usa[/url] [url=https://onlinedrugstore.sale/]medical mall pharmacy[/url]
YonCounk · September 5, 2022 at 6:28 am
[url=https://effexor.life/]generic effexor 225 mg cheapest[/url]
MarvinZem · September 5, 2022 at 6:38 am
[url=http://lexapro.sbs/]lexapro online usa[/url]
UgoCounk · September 5, 2022 at 6:40 am
[url=http://metoprolol.online/]lopressor brand name[/url]
DarrylSef · September 5, 2022 at 6:40 am
[url=http://disulfiram.fun/]where can i buy antabuse[/url] [url=http://viagraetab.quest/]online pharmacy canada generic viagra[/url] [url=http://duloxetine.cfd/]cymbalta brand[/url] [url=http://cialisrtabs.quest/]brand name cialis from canada[/url] [url=http://trazodone.media/]trazodone 300 mg discount[/url] [url=http://neurontin.click/]neurontin tablets no script[/url]
AmyCounk · September 5, 2022 at 6:46 am
[url=http://budesonide.fun/]budesonide 3mg capsules[/url]
MarkCounk · September 5, 2022 at 6:46 am
[url=https://doxycycline.fun/]buy online doxycycline[/url]
EvaCounk · September 5, 2022 at 6:47 am
[url=http://cephalexin.xyz/]keflex 500 mg generic[/url]
JaneCounk · September 5, 2022 at 6:52 am
[url=http://lasix.fun/]furosemide online no prescription[/url]
ElwoodGon · September 5, 2022 at 7:13 am
[url=http://disulfiram.fun/]antabuse ordering from uk[/url]
CarlCounk · September 5, 2022 at 7:23 am
[url=http://zofran.fun/]zofran 16 mg[/url]
ZakCounk · September 5, 2022 at 7:31 am
[url=https://gabapentin.xyz/]neurontin price in india[/url] [url=https://arimidex.cfd/]arimidex for bodybuilding[/url] [url=https://silagra.fun/]how to buy silagra online in usa[/url] [url=https://atarax.click/]hydroxyzine atarax[/url] [url=https://amoxil.fun/]amoxicillin 500mg without script[/url]
JudyCounk · September 5, 2022 at 7:35 am
[url=http://levothyroxine.site/]synthroid 100 mcg price[/url]
Michaelemult · September 5, 2022 at 7:42 am
[url=https://metformin.wiki/]buy generic metformin online[/url]
PaulCounk · September 5, 2022 at 8:02 am
[url=https://amoxicillin.joburg/]augmentin tab 875 mg[/url]
RobertFoold · September 5, 2022 at 8:20 am
[url=https://chloroquine.fun/]chloroquine[/url]
CarlCounk · September 5, 2022 at 8:24 am
[url=http://prednisone.fun/]cost of prednisone tablets[/url]
AmyCounk · September 5, 2022 at 8:31 am
[url=http://amoxicillin.joburg/]augmentin tab 875 mg[/url]
AmyCounk · September 5, 2022 at 8:32 am
[url=http://doxycycline.joburg/]doxycycline 250[/url]
YonCounk · September 5, 2022 at 8:32 am
[url=https://toradol.today/]toradol generic[/url]
DarrylSef · September 5, 2022 at 8:36 am
[url=http://bupropion.cfd/]wellbutrin 400 mg[/url] [url=http://robaxin.site/]robaxin without prescription[/url] [url=http://neurontin.fun/]gabapentin 309 mg[/url] [url=http://azithromycin.ink/]azithromycin 500 tablet price[/url] [url=http://doxycycline.party/]100 mg doxycycline[/url]
JackCounk · September 5, 2022 at 8:42 am
[url=https://atarax.click/]atarax medication[/url]
UgoCounk · September 5, 2022 at 8:43 am
[url=http://seroquel.digital/]seroquel 25 mg tablet[/url]
Edgarlor · September 5, 2022 at 8:46 am
[url=https://gabapentin.site/]gabapentin cheapest price[/url]
Edgarlor · September 5, 2022 at 9:05 am
[url=https://metformin.wiki/]where can i buy metformin[/url]
EvaCounk · September 5, 2022 at 9:30 am
[url=http://lasix.boutique/]lasix 20 mg tablet price[/url]
TedCounk · September 5, 2022 at 9:31 am
[url=https://prozac.capetown/]prozac price in india[/url]
JaneCounk · September 5, 2022 at 9:45 am
[url=http://motilium.fun/]motilium 10mg tab[/url]
TeoCounk · September 5, 2022 at 9:58 am
[url=https://lisinopril.media/]lisinopril 3.5 mg[/url]
WimCounk · September 5, 2022 at 10:05 am
[url=http://metformin2022.com/]metformin canada over the counter[/url]
DavisMug · September 5, 2022 at 10:12 am
[url=https://hydroxychloroquine.download/]hydroxychloroquine online[/url]
IvyCounk · September 5, 2022 at 10:13 am
[url=http://accutane.site/]accutane pills buy[/url] [url=http://isotretinoin.fun/]accutane online australia[/url]
DavisMug · September 5, 2022 at 10:22 am
[url=https://femaleviagra.monster/]best viagra uk[/url]
RichardFaply · September 5, 2022 at 10:42 am
[url=https://benicar.site/]buy benicar online cheap[/url] [url=https://hydroxychloroquine.mom/]generic plaquenil pills[/url] [url=https://robaxin.site/]robaxin price south africa[/url] [url=https://clonidine.fun/]clonidine gel[/url] [url=https://permethrin.xyz/]acticin without prescription[/url] [url=https://tizanidine.xyz/]tizanidine pills 4 mg[/url] [url=https://cialisetabs.monster/]buy tadalafil 20[/url]
TimothyThive · September 5, 2022 at 11:02 am
[url=http://allopurinol.site/]allopurinol 300 mg daily[/url]
DenCounk · September 5, 2022 at 11:03 am
[url=https://budesonide.fun/]budesonide 3 mg tablet[/url]
MichaelGuabe · September 5, 2022 at 11:05 am
[url=http://biaxin.fun/]biaxin for sinus infection[/url]
DavisMug · September 5, 2022 at 11:14 am
[url=https://duloxetine.xyz/]cymbalta 50 mg tablets[/url]
UgoCounk · September 5, 2022 at 11:17 am
[url=http://citalopram.boutique/]citalopram generic celexa[/url]
LisaCounk · September 5, 2022 at 11:42 am
[url=https://toradol.today/]over the counter toradol[/url]
JaneCounk · September 5, 2022 at 11:43 am
[url=http://vardenafil.live/]levitra 10 mg cost[/url]
ZakCounk · September 5, 2022 at 11:43 am
[url=https://effexor.life/]buy effexor xr[/url] [url=https://erectafil.fun/]erectafil 20 mg price[/url]
AlanCounk · September 5, 2022 at 11:45 am
[url=http://viagraftab.quest/]viagra online price[/url] [url=http://effexor.life/]effexor generic price[/url] [url=http://azithromycin.business/]azithromycin rx[/url] [url=http://hydroxychloroquine.tech/]hydroxychloroquine 200mg tablets[/url] [url=http://gabapentin.xyz/]purchase neurontin online[/url] [url=http://celecoxib.fun/]buy celebrex 200mg[/url] [url=http://lasix.fun/]buy lasix without a prescription[/url] [url=http://strattera.click/]strattera medicine in india[/url]
IvyCounk · September 5, 2022 at 11:51 am
[url=http://silagra.fun/]silagra 100mg[/url] [url=http://erectafil.fun/]erectafil[/url] [url=http://cialisitabs.quest/]buy tadalafil[/url] [url=http://doxycycline.fun/]doxycycline 100mg generic[/url]
KiaCounk · September 5, 2022 at 12:02 pm
[url=https://toradol.today/]toradol for fever[/url]
IvyCounk · September 5, 2022 at 12:17 pm
[url=http://sildalis.sbs/]sildalis 120 mg[/url] [url=http://viagraftab.quest/]order cheap viagra online[/url] [url=http://prednisone.fun/]prednisone 20 mg purchase[/url] [url=http://prozac.capetown/]fluoxetine 10 mg price in india[/url] [url=http://anafranil.site/]anafranil generic cost[/url]
RobertFoold · September 5, 2022 at 12:18 pm
[url=https://propranolol.life/]inderal online[/url]
BooCounk · September 5, 2022 at 1:00 pm
[url=https://clomid.company/]clomid for sale nz[/url]
DarrylSef · September 5, 2022 at 1:14 pm
[url=http://disulfiram.site/]how to get antabuse online[/url] [url=http://diflucan.fun/]generic diflucan otc[/url] [url=http://glucophage.life/]metformin 50[/url] [url=http://gabapentin.site/]gabapentin 1500 mg[/url]
Curtisvibia · September 5, 2022 at 1:17 pm
[url=https://viagraetab.quest/]can you buy viagra in europe[/url]
MaryCounk · September 5, 2022 at 1:20 pm
[url=https://amoxil.fun/]augmentin 1000 mg price[/url] [url=https://ampicillin.life/]ampicillin drug[/url] [url=https://clomid.network/]buy clomid otc[/url]
DenCounk · September 5, 2022 at 1:22 pm
[url=https://albendazole.sbs/]albenza albendazole[/url]
NickCounk · September 5, 2022 at 1:28 pm
[url=http://motilium.fun/]motilium generic brand[/url]
IvyCounk · September 5, 2022 at 1:36 pm
[url=http://cialisitabs.quest/]cialis[/url] [url=http://erectafil.fun/]buy erectafil 20[/url] [url=http://toradol.today/]where can i buy toradol[/url] [url=http://onlinedrugstore.xyz/]good pharmacy[/url] [url=http://tenormin.fun/]buy atenolol 50 mg[/url] [url=http://celecoxib.fun/]celebrex 200 daily[/url]
Edgarlor · September 5, 2022 at 1:42 pm
[url=https://disulfiram.site/]disulfiram rx[/url]
JackCounk · September 5, 2022 at 1:49 pm
[url=https://ampicillin.life/]order ampicillin[/url]
JimCounk · September 5, 2022 at 1:58 pm
[url=https://bupropion.site/]wellbutrin tablets[/url]
YonCounk · September 5, 2022 at 2:01 pm
[url=https://viagraftab.quest/]viagra pills 150 mg[/url]
Estebanguall · September 5, 2022 at 2:09 pm
[url=https://ciprofloxacin.xyz/]cipro otc[/url]
Michaelemult · September 5, 2022 at 2:12 pm
[url=https://vardenafil.life/]vardenafil hydrochloride[/url]
JosephMaict · September 5, 2022 at 2:19 pm
[url=http://albenza.xyz/]albendazole brand name price[/url] [url=http://permethrin.xyz/]generic elimite cream price[/url] [url=http://clonidine.fun/]where to get clonidine[/url] [url=http://neurontin.click/]neurontin cost generic[/url] [url=http://femaleviagra.monster/]sildenafil cost compare 100 mg[/url] [url=http://ciprofloxacin.xyz/]cipro india[/url]
MiclTek · September 5, 2022 at 2:32 pm
[url=http://propecia.moscow/]propecia witout prescription[/url]
DarrylSef · September 5, 2022 at 2:34 pm
[url=http://allopurinol.site/]where can i buy allopurinol[/url] [url=http://metformin.wiki/]purchase glucophage online[/url] [url=http://avodart.site/]avodart price comparison[/url] [url=http://gabapentin.site/]gabapentin rx discount[/url] [url=http://clonidine.fun/]clonidine hcl 0.1 mg[/url] [url=http://mebendazole.xyz/]vermox sale[/url]
Davidhup · September 5, 2022 at 2:34 pm
[url=http://benicar.site/]benicar hct cost[/url]
KimCounk · September 5, 2022 at 2:39 pm
[url=https://cialisrtab.monster/]generic cialis canada pharmacy[/url]
Samuelraisk · September 5, 2022 at 2:53 pm
[url=https://ciprofloxacin.xyz/]ciprofloxacin where can i buy[/url]
AnnaCounk · September 5, 2022 at 3:07 pm
[url=http://zithromax.site/]purchase azithromycin 500mg[/url]
MichaelDwego · September 5, 2022 at 3:21 pm
[url=https://neurontin.click/]gabapentin cost[/url]
SamCounk · September 5, 2022 at 3:35 pm
[url=http://prednisone.fun/]iv prednisone[/url] [url=http://clomid.site/]where can i buy clomid online uk[/url] [url=http://lisinopril.media/]lisinopril hct[/url] [url=http://levothyroxine.site/]synthroid 112 mcg price[/url] [url=http://zithromax.site/]azithromycin lowest price[/url]
RodneyTab · September 5, 2022 at 3:43 pm
[url=https://hydroxychloroquine.download/]hydroxychloroquine 90mg[/url]
AmyCounk · September 5, 2022 at 3:55 pm
[url=http://cialisrtab.monster/]levitra viagra cialis[/url]
JimCounk · September 5, 2022 at 4:01 pm
[url=https://lisinopril.media/]order lisinopril from mexico[/url]
RodneyTab · September 5, 2022 at 4:15 pm
[url=https://clonidine.fun/]cheap clonidine[/url]
IvyCounk · September 5, 2022 at 4:18 pm
[url=http://albendazole.sbs/]albendazole best over the counter[/url] [url=http://zofran.fun/]zofran online[/url]
Curtisvibia · September 5, 2022 at 4:23 pm
[url=https://gabapentin.site/]gabapentin 300mg online[/url]
RodneyTab · September 5, 2022 at 4:28 pm
[url=https://tadacip.fun/]canadian tadacip[/url]
RicIsose · September 5, 2022 at 4:29 pm
[url=http://glucophage.life/]glucophage uk[/url] [url=http://cialisktabs.quest/]cialis online 60mg[/url] [url=http://doxycycline.party/]generic doxycycline[/url]
Curtisvibia · September 5, 2022 at 4:35 pm
[url=https://metformin.moscow/]metformin 500 mg prices[/url]
MarvinZem · September 5, 2022 at 4:39 pm
[url=http://permethrin.xyz/]elimite over the counter uk[/url]
YonCounk · September 5, 2022 at 4:42 pm
[url=https://onlinedrugstore.fun/]top online pharmacy india[/url]
MarkCounk · September 5, 2022 at 4:56 pm
[url=https://lasix.boutique/]100 mg furosemide[/url]
Michaeldrist · September 5, 2022 at 5:00 pm
[url=http://zithromax.fun/]azithromycin in mexico[/url]
Edgarlor · September 5, 2022 at 5:33 pm
[url=https://celebrex.sbs/]celebrex tablets medicine[/url]
IvyCounk · September 5, 2022 at 5:40 pm
[url=http://strattera.click/]brand name strattera coupon[/url] [url=http://lisinopril.media/]buy lisinopril 20 mg[/url] [url=http://strattera.today/]strattera prescription cost[/url] [url=http://prednisone.fun/]where to buy prednisone online without a script[/url] [url=http://ampicillin.life/]ampicillin tablet price in india[/url]
NickCounk · September 5, 2022 at 5:41 pm
[url=http://viagraftab.quest/]viagra pill price in india[/url]
ZakCounk · September 5, 2022 at 5:48 pm
[url=https://motilium.fun/]buy motilium usa[/url] [url=https://celecoxib.fun/]celebrex from canada without a prescription[/url] [url=https://budesonide.fun/]budesonide 3 mg price india[/url]
Michaeldrist · September 5, 2022 at 5:49 pm
[url=http://tadacip.fun/]tadacip 10 mg[/url]
RodneyTab · September 5, 2022 at 5:51 pm
[url=https://vardenafil.life/]how to purchase levitra online[/url]
IvyCounk · September 5, 2022 at 5:54 pm
[url=http://ampicillin.life/]ampicillin generic[/url] [url=http://clomid.network/]where to buy clomid in south africa[/url] [url=http://lasix.boutique/]lasix 40 mg tablet price[/url] [url=http://dexamethasone.fun/]dexamethasone 10[/url] [url=http://gabapentin.xyz/]neurontin price uk[/url] [url=http://silagra.xyz/]cheap silagra[/url]
AmyCounk · September 5, 2022 at 5:59 pm
[url=http://strattera.click/]buy strattera[/url]
Michaelemult · September 5, 2022 at 6:05 pm
[url=https://bupropion.cfd/]bupropion hcl xl[/url]
RodneyTab · September 5, 2022 at 6:06 pm
[url=https://clonidine.fun/]clonidine price[/url]
RodneyTab · September 5, 2022 at 6:24 pm
[url=https://viagraetab.quest/]can i buy viagra otc[/url]
DarrylSef · September 5, 2022 at 6:25 pm
[url=http://celebrex.sbs/]celebrex cost australia[/url] [url=http://clonidine.fun/]1 mg clonidine[/url] [url=http://glucophage.life/]glucophage 500mg buy online[/url] [url=http://bupropion.cfd/]bupropion medication[/url] [url=http://lexapro.sbs/]lexapro cheapest price[/url] [url=http://sildenafil.ink/]how to buy viagra cheap[/url]
DenCounk · September 5, 2022 at 6:30 pm
[url=https://cephalexin.xyz/]cephalexin capsules 500mg price[/url]
EyeCounk · September 5, 2022 at 6:35 pm
[url=https://doxycycline.joburg/]doxycycline uk[/url] [url=https://lexapro.today/]lexapro 5mg cost[/url] [url=https://toradol.today/]toradol generic brand name[/url]
Edgarlor · September 5, 2022 at 6:39 pm
[url=https://metformin.wiki/]cheap metformin[/url]
Edgarlor · September 5, 2022 at 6:54 pm
[url=https://clonidine.fun/]clonidine 50 mcg[/url]
DarrylSef · September 5, 2022 at 7:03 pm
[url=http://robaxin.site/]where can i buy robaxin[/url] [url=http://metformin.wiki/]metformin online australia[/url] [url=http://glucophage.life/]metformin 5[/url] [url=http://gabapentin.site/]800 mg gabapentin price[/url] [url=http://chloroquine.fun/]emquin[/url] [url=http://zithromax.fun/]where to get azithromycin over the counter[/url]
AmyCounk · September 5, 2022 at 7:03 pm
[url=http://onlinedrugstore.digital/]safe online pharmacy[/url]
WilliamWem · September 5, 2022 at 7:19 pm
[url=https://neurontin.fun/]600 mg gabapentin capsule[/url] [url=https://trazodone.media/]40 mg trazodone[/url] [url=https://zoloft.ink/]zoloft medicine price[/url] [url=https://zithromax.fun/]cheap azithromycin[/url] [url=https://tadacip.fun/]tadacip india pharmacy[/url] [url=https://disulfiram.fun/]antabuse otc[/url]
UgoCounk · September 5, 2022 at 7:20 pm
[url=http://drugstore.boutique/]canadian pharmacy cialis[/url]
MichaelGuabe · September 5, 2022 at 7:26 pm
[url=http://propranolol.life/]buy propranolol[/url]
IvyCounk · September 5, 2022 at 7:36 pm
[url=http://effexor.life/]effexor 37.5 mg tablets[/url] [url=http://accutane.site/]accutane for sale without prescription[/url] [url=http://cialisrtab.monster/]tadalafil generic over the counter[/url] [url=http://erectafil.fun/]erectafil 20 online[/url] [url=http://levothyroxine.site/]synthroid 25 mg coupon[/url] [url=http://clomid.site/]clomid estrogen[/url]
JaneCounk · September 5, 2022 at 7:44 pm
[url=http://bupropion.site/]price of generic wellbutrin[/url]
WilliamWem · September 5, 2022 at 7:47 pm
[url=https://wellbutrin.fun/]bupropion 50 mg tablets[/url] [url=https://trazodone.media/]desyrel medication[/url] [url=https://hydroxychloroquine.mom/]quineprox kratom chloroquine[/url]
AlanCounk · September 5, 2022 at 7:51 pm
[url=http://tenormin.fun/]atenolol 100mg[/url] [url=http://anafranil.site/]generic anafranil cost[/url] [url=http://motilium.fun/]where can i buy motilium[/url] [url=http://prednisone.fun/]buy prednisone online without a prescription[/url]
LisaCounk · September 5, 2022 at 7:51 pm
[url=https://lexapro.today/]medication lexapro 10 mg[/url]
MiclTek · September 5, 2022 at 7:59 pm
[url=http://viagraetab.quest/]cost of 100mg viagra pill[/url]
MichaelGuabe · September 5, 2022 at 8:03 pm
[url=http://allopurinol.site/]allopurinol 300 mg tablets price[/url]
Samuelraisk · September 5, 2022 at 8:09 pm
[url=https://permethrin.xyz/]elimite[/url]
RobertFoold · September 5, 2022 at 8:12 pm
[url=https://allopurinol.site/]medication allopurinol[/url]
RichardFaply · September 5, 2022 at 8:35 pm
[url=https://lexapro.sbs/]lexapro generic over the counter[/url] [url=https://benicar.site/]benicar 5 mg price[/url] [url=https://zithromax.fun/]azithromycin 500 mg tablet brand name[/url] [url=https://cialismtabs.monster/]tadalafil pills for sale[/url] [url=https://ciprofloxacin.xyz/]order ciprofloxacin online[/url]
ElwoodGon · September 5, 2022 at 8:40 pm
[url=http://allopurinol.site/]allopurinol 400 mg[/url]
SueCounk · September 5, 2022 at 8:54 pm
[url=http://celecoxib.fun/]celebrex price canada[/url]
Edgarlor · September 5, 2022 at 9:07 pm
[url=https://mebendazole.cfd/]online pharmacy vermox[/url]
JimCounk · September 5, 2022 at 9:14 pm
[url=https://celecoxib.fun/]buy celebrex 200mg pills online[/url]
TimothyThive · September 5, 2022 at 9:17 pm
[url=http://sildenafil.ink/]buy viagra south africa online[/url]
NickCounk · September 5, 2022 at 9:18 pm
[url=http://doxycycline.fun/]doxycycline 100mg tablets[/url]
JudyCounk · September 5, 2022 at 9:19 pm
[url=http://cephalexin.xyz/]cephalexin 250 mg price[/url]
MaryCounk · September 5, 2022 at 9:31 pm
[url=https://strattera.today/]strattera cost[/url] [url=https://doxycycline.joburg/]cheapest doxycycline tablets[/url] [url=https://cialisrtab.monster/]cialis 100mg online[/url] [url=https://lasix.fun/]lasix 500[/url] [url=https://levothyroxine.site/]synthroid 500 mcg[/url] [url=https://lexapro.today/]lexapro generic cost[/url] [url=https://amoxicillin.joburg/]amoxil 500 cost[/url]
ElwoodGon · September 5, 2022 at 9:34 pm
[url=http://albenza.xyz/]buy albenza canada[/url]
MaryCounk · September 5, 2022 at 9:54 pm
[url=https://trimox.xyz/]augmentin best price[/url] [url=https://doxycycline.joburg/]where can i buy doxycycline capsules[/url] [url=https://onlinedrugstore.xyz/]canadianpharmacymeds[/url] [url=https://silagra.xyz/]silagra 25 mg[/url]
UgoCounk · September 5, 2022 at 10:25 pm
[url=http://prozac.guru/]prozac prices canada[/url]
Curtisvibia · September 5, 2022 at 10:31 pm
[url=https://viagraptab.quest/]viagra 100 coupon[/url]
ZakCounk · September 5, 2022 at 10:36 pm
[url=https://sildalis.sbs/]sildalis 120[/url] [url=https://strattera.click/]buy strattera 80 mg[/url] [url=https://cialisrtab.monster/]generic cialis paypal[/url] [url=https://bupropion.site/]bupropion discount[/url] [url=https://vardenafil.live/]order levitra professional[/url] [url=https://doxycycline.joburg/]doxycycline 100mg for sale[/url] [url=https://silagra.xyz/]silagra 100mg[/url] [url=https://cialisitabs.quest/]cheap cialis australia[/url]
Edgarlor · September 5, 2022 at 10:38 pm
[url=https://hydroxychloroquine.mom/]plaquenil price us[/url]
IvyCounk · September 5, 2022 at 10:40 pm
[url=http://zithromax.site/]purchase azithromycin 500 mg tablets[/url] [url=http://strattera.click/]strattera 10 mg cap[/url] [url=http://zofran.fun/]zofran otc price[/url] [url=http://trimox.xyz/]cost of amoxicillin prescription[/url] [url=http://silagra.xyz/]buy silagra tablets[/url]
Jameseloro · September 5, 2022 at 10:49 pm
[url=https://wellbutrin.fun/]bupropion xl 150 mg[/url] [url=https://vardenafil.life/]cheapest levitra online uk[/url] [url=https://celebrex.sbs/]buy generic celebrex otc[/url] [url=https://tizanidine.xyz/]tizanidine medicine[/url] [url=https://zithromax.fun/]zithromax 200mg[/url] [url=https://disulfiram.site/]antabuse price australia[/url] [url=https://paxil.site/]paroxetine er 12.5mg[/url] [url=https://viagraetab.quest/]viagra rx cost[/url]
YonCounk · September 5, 2022 at 10:49 pm
[url=https://ampicillin.life/]ampicillin trihydrate[/url]
NickCounk · September 5, 2022 at 10:53 pm
[url=http://strattera.today/]buy strattera[/url]
Jameseloro · September 5, 2022 at 11:03 pm
[url=https://permethrin.xyz/]elimite cream over the counter[/url] [url=https://allopurinol.site/]allopurinol 100mg coupon[/url] [url=https://metformin.wiki/]buy metformin 500 mg[/url] [url=https://metformin.moscow/]2500 mg metformin[/url] [url=https://gabapentin.site/]best price for gabapentin 300 mg[/url] [url=https://trazodone.media/]trazodone 6161[/url]
JudyCounk · September 5, 2022 at 11:05 pm
[url=http://bactrim.icu/]buy bactrim[/url]
MaryCounk · September 5, 2022 at 11:41 pm
[url=https://doxycycline.fun/]doxycycline price uk[/url] [url=https://gabapentin.xyz/]neurontin cost in singapore[/url] [url=https://bupropion.site/]wellbutrin 142[/url] [url=https://prednisone.fun/]where can i buy prednisone over the counter[/url]
YonCounk · September 5, 2022 at 11:54 pm
[url=https://onlinedrugstore.xyz/]sky pharmacy[/url]
EyeCounk · September 5, 2022 at 11:58 pm
[url=https://clomid.network/]clomid for sale cheap[/url] [url=https://amoxicillin.joburg/]amoxicillin 500mg capsule buy online[/url] [url=https://accutane.site/]how much is accutane[/url]
JasonCounk · September 6, 2022 at 12:00 am
[url=https://dexamethasone.fun/]dexamethasone online pharmacy[/url]
Michaelemult · September 6, 2022 at 12:02 am
[url=https://metformin.moscow/]metformin online pharmacy[/url]
NickCounk · September 6, 2022 at 12:07 am
[url=http://budesonide.fun/]buy budesonide canada[/url]
CarlCounk · September 6, 2022 at 12:10 am
[url=http://viagraftab.quest/]canada drug pharmacy viagra[/url]
JasonCounk · September 6, 2022 at 12:38 am
[url=https://effexor.life/]effexor 37.5 mg tablets[/url]
DenCounk · September 6, 2022 at 12:42 am
[url=https://amoxil.fun/]purchase augmentin online[/url]
MichaelDwego · September 6, 2022 at 12:44 am
[url=https://duloxetine.xyz/]cymbalta 90 mg pill[/url]
Charlesaduse · September 6, 2022 at 12:59 am
[url=http://disulfiram.fun/]antabuse medication[/url]
Estebanguall · September 6, 2022 at 1:05 am
[url=https://valtrex.site/]brand name valtrex cost[/url]
RodneyTab · September 6, 2022 at 1:27 am
[url=https://biaxin.fun/]biaxin for strep[/url]
TommyHepsy · September 6, 2022 at 1:41 am
[url=http://permethrin.xyz/]where can you buy elimite cream[/url]
IvyCounk · September 6, 2022 at 1:42 am
[url=http://prozac.capetown/]buy prozac india[/url] [url=http://amoxicillin.joburg/]can you buy amoxicillin over the counter in canada[/url] [url=http://gabapentin.xyz/]neurontin brand name 800 mg[/url] [url=http://toradol.today/]toradol tabs[/url]
DavisMug · September 6, 2022 at 1:55 am
[url=https://wellbutrin.fun/]750 mg wellbutrin[/url]
AnnaCounk · September 6, 2022 at 2:00 am
[url=http://amoxil.fun/]amoxicillin prescription cost[/url]
Michaelemult · September 6, 2022 at 2:10 am
[url=https://femaleviagra.monster/]compare generic viagra prices[/url]
JimCounk · September 6, 2022 at 2:11 am
[url=https://lexapro.today/]buy lexapro in mexico[/url]
Jameseloro · September 6, 2022 at 2:33 am
[url=https://viagraptab.quest/]how can i get viagra without a prescription[/url] [url=https://hydroxychloroquine.mom/]plaquenil weight loss[/url] [url=https://robaxin.site/]robaxin 500 mg tablet price[/url] [url=https://celebrex.sbs/]celebrex 100mg capsule cost[/url] [url=https://cialisetabs.monster/]generic cialis soft 20mg[/url] [url=https://disulfiram.site/]antabuse tablets[/url]
DavisMug · September 6, 2022 at 2:50 am
[url=https://zithromax.fun/]purchase azithromycin 500 mg tablets[/url]
MarkCounk · September 6, 2022 at 2:54 am
[url=https://ampicillin.life/]ampicillian[/url]
MiclTek · September 6, 2022 at 3:00 am
[url=http://metformin.moscow/]cheap metformin online[/url]
DavisMug · September 6, 2022 at 3:01 am
[url=https://mebendazole.xyz/]vermox in usa[/url]
CarlCounk · September 6, 2022 at 3:22 am
[url=http://zithromax.site/]azithromycin 1000[/url]
AnnaCounk · September 6, 2022 at 3:26 am
[url=http://zithromax.site/]azithromycin 250 1mg[/url]
RobertFoold · September 6, 2022 at 3:27 am
[url=https://avodart.site/]avodart price canada[/url]
KiaCounk · September 6, 2022 at 3:27 am
[url=https://effexor.life/]over the counter effexor[/url]
WilliamWem · September 6, 2022 at 3:34 am
[url=https://disulfiram.fun/]antabuse online generic[/url] [url=https://neurontin.click/]neurontin 200 mg tablets[/url] [url=https://viagraetab.quest/]cheap viagra india[/url] [url=https://valtrex.site/]valtrex 500 mg uk price[/url] [url=https://cialismtabs.monster/]tadalafil 10mg coupon[/url]
MarvinZem · September 6, 2022 at 4:11 am
[url=http://metformin.wiki/]metformin 200[/url]
DavisMug · September 6, 2022 at 4:30 am
[url=https://cialisetabs.monster/]cialis 20mg best price[/url]
SueCounk · September 6, 2022 at 4:31 am
[url=http://budesonide.fun/]budecort price[/url]
AlanCounk · September 6, 2022 at 4:34 am
[url=http://cialisitabs.quest/]cialis uk 20mg[/url] [url=http://strattera.today/]strattera prescription drug[/url] [url=http://bactrim.icu/]bactrim uk pharmacy[/url] [url=http://erectafil.fun/]erectafil 40[/url] [url=http://lasix.fun/]lasix 10 mg[/url] [url=http://silagra.xyz/]silagra 100 price in india[/url]
EyeCounk · September 6, 2022 at 4:49 am
[url=https://accutane.site/]200 mg accutane[/url] [url=https://hydroxychloroquine.tech/]hydroxychloroquine 100 mg tablet[/url] [url=https://prednisone.fun/]brand name drug prednisone[/url] [url=https://isotretinoin.fun/]accutane oral[/url] [url=https://onlinedrugstore.xyz/]best online pharmacy india[/url] [url=https://viagraftab.quest/]female viagra pills online buy[/url] [url=https://atarax.click/]atarax tablet 10 mg[/url] [url=https://amoxil.fun/]can you buy over the counter amoxicillin[/url]
RodneyTab · September 6, 2022 at 4:55 am
[url=https://bupropion.cfd/]bupropion 75 mg in india[/url]
BooCounk · September 6, 2022 at 4:58 am
[url=https://buyatomoxetine.shop/]buy nolvadex australia[/url]
WimCounk · September 6, 2022 at 5:02 am
[url=http://robaxin.shop/]buy robaxin no prescription[/url]
LisaCounk · September 6, 2022 at 5:06 am
[url=https://zithromax.site/]zithromax pill[/url]
IvyCounk · September 6, 2022 at 5:26 am
[url=http://erectafil.fun/]erectafil 10[/url] [url=http://silagra.xyz/]silagra 100 online[/url] [url=http://lisinopril.media/]lisinopril 20mg[/url] [url=http://lasix.boutique/]furosemide 100 mg[/url] [url=http://gabapentin.xyz/]neurontin 800mg[/url] [url=http://onlinedrugstore.xyz/]secure medical online pharmacy[/url] [url=http://viagraftab.quest/]viagra 100mg online buy india[/url] [url=http://cephalexin.xyz/]cephalexin 600 mg[/url]
AnnaCounk · September 6, 2022 at 5:31 am
[url=http://zofran.fun/]zofran 8 mg discount[/url]
RichardFaply · September 6, 2022 at 5:37 am
[url=https://duloxetine.cfd/]cymbalta 60 mg price australia[/url] [url=https://disulfiram.site/]antabuse price[/url] [url=https://paxil.site/]paxil pill[/url] [url=https://valtrex.site/]1000 mg valtrex daily[/url] [url=https://vardenafil.life/]levitra capsules[/url] [url=https://diflucan.fun/]where to buy diflucan without prescription[/url]
JackCounk · September 6, 2022 at 5:41 am
[url=https://arimidex.cfd/]arimidex for sale usa[/url]
AmyCounk · September 6, 2022 at 5:45 am
[url=http://amoxicillin.joburg/]amoxil discount[/url]
JudyCounk · September 6, 2022 at 5:54 am
[url=http://toradol.today/]buying toradol online[/url]
EyeCounk · September 6, 2022 at 5:54 am
[url=https://tenormin.fun/]generic atenolol price[/url] [url=https://cialisitabs.quest/]cialis 5 mg tablets cost[/url] [url=https://bactrim.icu/]bactrim 800 mg price[/url] [url=https://lisinopril.media/]lisinopril 4 mg[/url] [url=https://silagra.fun/]silagra india[/url]
JasonCounk · September 6, 2022 at 5:55 am
[url=https://cialisitabs.quest/]cialis online price[/url]
Michaelemult · September 6, 2022 at 6:10 am
[url=https://viagraetab.quest/]generic female viagra in india[/url]
KiaCounk · September 6, 2022 at 6:16 am
[url=https://strattera.click/]strattera 80 mg cost[/url]
ZakCounk · September 6, 2022 at 6:38 am
[url=https://effexor.life/]effexor 25 mg tablet[/url] [url=https://albendazole.sbs/]albendazole tablets 400 mg price in india[/url] [url=https://prozac.capetown/]fluoxetine south africa[/url] [url=https://celecoxib.fun/]buy celebrex online[/url] [url=https://gabapentin.xyz/]gabapentin 665[/url] [url=https://toradol.today/]toradol pain shot[/url]
JaneCounk · September 6, 2022 at 6:42 am
[url=http://lisinopril.media/]lisinopril in mexico[/url]
WimCounk · September 6, 2022 at 6:53 am
[url=http://diflucan.shop/]diflucan tablet[/url]
Charlesaduse · September 6, 2022 at 7:02 am
[url=http://mebendazole.xyz/]buy vermox canada[/url]
SamCounk · September 6, 2022 at 7:05 am
[url=http://sildalis.sbs/]buy sildalis online[/url] [url=http://ampicillin.life/]over the counter ampicillin pills[/url] [url=http://silagra.xyz/]buy silagra 50 mg[/url] [url=http://erectafil.fun/]erectafil 20 for sale[/url] [url=http://effexor.life/]wellbutrin effexor[/url] [url=http://isotretinoin.fun/]accutane canada 40mg[/url]
DavisMug · September 6, 2022 at 7:08 am
[url=https://bupropion.cfd/]bupropion 200 mg price[/url]
Charlesaduse · September 6, 2022 at 7:13 am
[url=http://duloxetine.xyz/]cymbalta lexapro[/url]
WimCounk · September 6, 2022 at 7:14 am
[url=http://orlistat.store/]buy xenical 120 mg[/url]
RodneyTab · September 6, 2022 at 7:36 am
[url=https://zithromax.fun/]azithromycin 500mg tablets cost[/url]
RicIsose · September 6, 2022 at 7:50 am
[url=http://mebendazole.xyz/]vermox online usa[/url] [url=http://hydroxychloroquine.download/]plaquenil cost without insurance[/url] [url=http://metformin.wiki/]metformin 13[/url] [url=http://neurontin.click/]gabapentin otc[/url]
RichardFaply · September 6, 2022 at 7:59 am
[url=https://femaleviagra.monster/]viagra pills online in india[/url] [url=https://disulfiram.site/]buy antabuse in uk[/url]
Michaeldrist · September 6, 2022 at 8:06 am
[url=http://tizanidine.xyz/]tizanidine 2 mg tablet[/url]
ElwoodGon · September 6, 2022 at 8:09 am
[url=http://sildenafil.ink/]cheapest price for viagra 100mg[/url]
DavisMug · September 6, 2022 at 8:14 am
[url=https://disulfiram.site/]how to get antabuse prescription[/url]
AnnaCounk · September 6, 2022 at 8:19 am
[url=http://prozac.capetown/]buy fluoxetine online uk[/url]
ElwoodGon · September 6, 2022 at 8:44 am
[url=http://metformin.wiki/]cheap metformin online[/url]
Samuelraisk · September 6, 2022 at 9:03 am
[url=https://celebrex.sbs/]buy celebrex nz[/url]
IvyCounk · September 6, 2022 at 9:12 am
[url=http://silagra.fun/]silagra 50 mg price in india[/url] [url=http://silagra.xyz/]silagra tablet[/url] [url=http://effexor.life/]effexor 37.5 price[/url] [url=http://ampicillin.life/]buy ampicillian[/url] [url=http://onlinedrugstore.digital/]safe online pharmacy[/url] [url=http://zithromax.site/]azithromycin 600 mg[/url] [url=http://bactrim.icu/]bactrim 800 mg coupon[/url] [url=http://hydroxychloroquine.tech/]hydroxychloroquine tablets 10 mg[/url]
CarlCounk · September 6, 2022 at 9:14 am
[url=http://budesonide.fun/]budesonide 3[/url]
DenCounk · September 6, 2022 at 9:22 am
[url=https://cialisrtab.monster/]cheap real cialis[/url]
DavisMug · September 6, 2022 at 9:33 am
[url=https://sildenafil.ink/]buy cheap generic viagra[/url]
JasonCounk · September 6, 2022 at 9:41 am
[url=https://erectafil.fun/]erectafil 20 mg[/url]
Jameseloro · September 6, 2022 at 9:52 am
[url=https://metformin.moscow/]metformin 1mg[/url] [url=https://metformin.wiki/]glucophage price south africa[/url]
ElwoodGon · September 6, 2022 at 9:59 am
[url=http://celebrex.sbs/]buy celebrex uk[/url]
AshCounk · September 6, 2022 at 10:04 am
[url=https://buyvaltrex.digital/]where to get valtrex prescription[/url] [url=https://metformin.bid/]buy metformin online australia[/url] [url=https://tadacip.digital/]buy tadacip[/url] [url=https://cialisstab.monster/]order tadalafil online india[/url]
UgoCounk · September 6, 2022 at 10:08 am
[url=http://buyprednisolone.works/]prednisolone 5mg price[/url]
IvyCounk · September 6, 2022 at 10:10 am
[url=http://hydroxychloroquine.tech/]hydroxychloroquine sulfate tablet 200 mg[/url] [url=http://arimidex.cfd/]online prescription arimidex[/url] [url=http://onlinedrugstore.digital/]online pharmacy store[/url] [url=http://doxycycline.joburg/]doxycycline online for dogs[/url] [url=http://prednisone.fun/]deltasone 50 mg[/url]
JasonCounk · September 6, 2022 at 10:10 am
[url=https://strattera.today/]buy strattera online australia[/url]
SueCounk · September 6, 2022 at 10:27 am
[url=http://motilium.fun/]motilium tablet uk[/url]
DarrylSef · September 6, 2022 at 10:36 am
[url=http://ciprofloxacin.xyz/]cipro cost in mexico[/url] [url=http://viagraptab.quest/]viagra online japan[/url] [url=http://cialisktabs.quest/]generic cialis cheapest price[/url] [url=http://tadacip.fun/]tadacip 10 mg[/url] [url=http://hydroxychloroquine.download/]hydroxychloroquine sulfate 800 mg[/url] [url=http://tizanidine.xyz/]buy tizanidine 4 mg[/url] [url=http://wellbutrin.fun/]cost of wellbutrin 300 mg[/url] [url=http://viagraetab.quest/]where to get generic viagra for women[/url]
TedCounk · September 6, 2022 at 10:37 am
[url=https://budesonide.fun/]budesonide 3mg capsules[/url]
Edgarlor · September 6, 2022 at 10:47 am
[url=https://zithromax.fun/]buy zithromax online uk[/url]
Estebanguall · September 6, 2022 at 10:52 am
[url=https://neurontin.fun/]neurontin 600[/url]
ZakCounk · September 6, 2022 at 10:59 am
[url=https://erectafil.fun/]erectafil online[/url] [url=https://cialisrtab.monster/]cialis 40[/url] [url=https://effexor.life/]effexor 150 mg[/url]
JasonCounk · September 6, 2022 at 10:59 am
[url=https://zofran.fun/]zofran[/url]
Estebanguall · September 6, 2022 at 11:03 am
[url=https://azithromycin.ink/]azithromycin online sale[/url]
TimothyThive · September 6, 2022 at 11:11 am
[url=http://allopurinol.site/]allopurinol 100mg tablets price[/url]
KiaCounk · September 6, 2022 at 11:12 am
[url=https://dexamethasone.fun/]dexamethasone 500mcg[/url]
MiaCounk · September 6, 2022 at 11:21 am
[url=http://sildalis.sbs/]sildalis[/url]
ElwoodGon · September 6, 2022 at 11:34 am
[url=http://disulfiram.site/]disulfiram pill[/url]
ZakCounk · September 6, 2022 at 11:52 am
[url=https://prednisone.fun/]buy deltasone no prescription[/url] [url=https://trimox.xyz/]100mg amoxicillin[/url] [url=https://amoxicillin.joburg/]augmentin medicine price[/url]
MiaCounk · September 6, 2022 at 12:02 pm
[url=http://sildalis.sbs/]sildalis india[/url]
DenCounk · September 6, 2022 at 12:02 pm
[url=https://escitalopram.cfd/]cheap generic lexapro online[/url]
JoeCounk · September 6, 2022 at 12:06 pm
[url=https://vardenafil.live/]cheap levitra 10mg[/url] [url=https://clomid.network/]where can i buy clomid online in australia[/url]
DarrylSef · September 6, 2022 at 12:07 pm
[url=http://tizanidine.xyz/]tizanidine sale[/url] [url=http://trazodone.media/]desyrel 25 mg[/url]
Curtisvibia · September 6, 2022 at 12:08 pm
[url=https://doxycycline.party/]buy doxycycline 200 mg[/url]
ElwoodGon · September 6, 2022 at 12:14 pm
[url=http://trazodone.media/]trazodone canada brand name[/url]
LisaCounk · September 6, 2022 at 12:14 pm
[url=https://clomid.site/]can you buy clomid without a prescription[/url]
Edgarlor · September 6, 2022 at 12:16 pm
[url=https://clonidine.fun/]buy clonidine australia[/url]
YonCounk · September 6, 2022 at 12:19 pm
[url=https://prozac.capetown/]fluoxetine 20mg capsules[/url]
RicIsose · September 6, 2022 at 12:24 pm
[url=http://duloxetine.cfd/]cymbalta 10mg[/url] [url=http://clonidine.fun/]clonidine 0.1[/url]
JoeCounk · September 6, 2022 at 12:34 pm
[url=https://arimidex.cfd/]arimidex brand name in india[/url] [url=https://sildalis.sbs/]sildalis cheap[/url] [url=https://motilium.fun/]motilium tablet uk[/url] [url=https://strattera.today/]strattera online europe[/url] [url=https://vardenafil.live/]levitra generic india[/url] [url=https://cialisrtab.monster/]generic cialis 20[/url]
TedCounk · September 6, 2022 at 12:37 pm
[url=https://erectafil.fun/]erectafil 5mg[/url]
MaryCounk · September 6, 2022 at 12:37 pm
[url=https://prednisone.fun/]generic deltasone[/url] [url=https://gabapentin.xyz/]gabapentin capsules[/url]
JoeCounk · September 6, 2022 at 12:43 pm
[url=https://cialisrtab.monster/]where can you get cialis over the counter[/url] [url=https://bupropion.site/]zyban generic[/url] [url=https://prozac.capetown/]prozac canada[/url] [url=https://azithromycin.business/]azithromycin 500 mg prices[/url] [url=https://budesonide.fun/]budesonide 80[/url] [url=https://effexor.life/]effexor 70 mg[/url] [url=https://strattera.click/]strattera 25 mg caps[/url] [url=https://zofran.fun/]zofran otc price[/url]
DarrylSef · September 6, 2022 at 12:52 pm
[url=http://wellbutrin.fun/]bupropion 15mg[/url] [url=http://vardenafil.life/]generic for levitra[/url] [url=http://lexapro.sbs/]cymbalta lexapro[/url] [url=http://neurontin.click/]buy gabapentin online no prescription[/url] [url=http://disulfiram.fun/]disulfiram us[/url] [url=http://metformin.wiki/]glucophage 1000 mg[/url] [url=http://glucophage.life/]metformin coupon[/url] [url=http://cialisktabs.quest/]can you buy cialis otc[/url]
TedCounk · September 6, 2022 at 1:13 pm
[url=https://accutane.site/]accutane medicine[/url]
MiclTek · September 6, 2022 at 1:17 pm
[url=http://permethrin.xyz/]acticin 650[/url]
Jameseloro · September 6, 2022 at 1:18 pm
[url=https://chloroquine.fun/]where to get aralen[/url] [url=https://hydroxychloroquine.mom/]plaquenil 200 mg tablet[/url] [url=https://femaleviagra.monster/]where to get female viagra[/url] [url=https://tizanidine.xyz/]zanaflex tablet[/url] [url=https://cialismtabs.monster/]chewing up viagra[/url] [url=https://albenza.xyz/]is albenza over the counter[/url] [url=https://neurontin.fun/]gabapentin 1600 mg[/url] [url=https://lexapro.sbs/]generic lexapro online pharmacy[/url]
Jameseloro · September 6, 2022 at 1:25 pm
[url=https://glucophage.life/]order metformin on line[/url] [url=https://gabapentin.site/]gabapentin prescription online[/url] [url=https://lexapro.sbs/]buy lexapro online without prescription[/url] [url=https://duloxetine.cfd/]cymbalta cost generic[/url] [url=https://trazodone.media/]trazodone 150 mg capsules[/url] [url=https://tizanidine.xyz/]zanaflex for anxiety[/url] [url=https://chloroquine.fun/]where to buy chloroquine[/url]
NickCounk · September 6, 2022 at 1:27 pm
[url=http://viagraftab.quest/]viagra 100 mg generic[/url]
Estebanguall · September 6, 2022 at 1:35 pm
[url=https://viagraptab.quest/]viagra compare prices[/url]
YonCounk · September 6, 2022 at 1:47 pm
[url=https://anafranil.site/]anafranil depression[/url]
IvyCounk · September 6, 2022 at 1:53 pm
[url=http://prednisone.fun/]prednisone 20mg[/url] [url=http://sildalis.sbs/]sildalis without prescription[/url]
DarrylSef · September 6, 2022 at 2:11 pm
[url=http://chloroquine.fun/]chlorochin[/url] [url=http://viagraetab.quest/]where to purchase viagra online[/url] [url=http://mebendazole.xyz/]vermox over the counter canada[/url] [url=http://valtrex.site/]2870 valtrex[/url] [url=http://allopurinol.site/]allopurinol for sale[/url] [url=http://neurontin.fun/]neurontin 800 mg tablet[/url] [url=http://gabapentin.site/]rx gabapentin[/url] [url=http://trazodone.media/]trazodone hydrochloride[/url]
Samuelraisk · September 6, 2022 at 2:38 pm
[url=https://cialisrtabs.quest/]us cialis[/url]
MarvinZem · September 6, 2022 at 2:39 pm
[url=http://neurontin.click/]gabapentin buy usa[/url]
RodneyTab · September 6, 2022 at 2:43 pm
[url=https://paxil.site/]paroxetine 10 mg[/url]
KiaCounk · September 6, 2022 at 2:55 pm
[url=https://sildalis.sbs/]sildalis cheap[/url]
Jameseloro · September 6, 2022 at 3:05 pm
[url=https://trazodone.media/]desyrel for sleep[/url] [url=https://neurontin.fun/]medicine neurontin[/url] [url=https://benicar.site/]benicar from canada[/url] [url=https://propranolol.life/]inderal cost australia[/url] [url=https://lexapro.sbs/]buy lexapro online uk[/url] [url=https://robaxin.site/]buy robaxin online uk[/url] [url=https://metformin.wiki/]metformin price in canada[/url]
AlanCounk · September 6, 2022 at 3:14 pm
[url=http://sildalis.sbs/]sildalis 120[/url] [url=http://atarax.click/]atarax sale[/url] [url=http://gabapentin.xyz/]gabapentin pills 800mg[/url]
Charlesaduse · September 6, 2022 at 3:23 pm
[url=http://mebendazole.cfd/]mebendazole tablets[/url]
Michaelemult · September 6, 2022 at 3:30 pm
[url=https://valtrex.site/]valtrex cost india[/url]
AlanCounk · September 6, 2022 at 3:32 pm
[url=http://onlinedrugstore.xyz/]legal canadian pharmacy online[/url] [url=http://toradol.today/]toradol sale[/url] [url=http://amoxicillin.joburg/]augmentin 125 mg tab[/url] [url=http://ampicillin.life/]buy cheap ampicillin[/url] [url=http://trimox.xyz/]amoxicillin purchase uk[/url] [url=http://zithromax.site/]azithromycin 260 mg[/url]
DavisMug · September 6, 2022 at 3:37 pm
[url=https://chloroquine.fun/]aralen australia[/url]
DarrylSef · September 6, 2022 at 3:38 pm
[url=http://cialisktabs.quest/]buy real cialis online canada[/url] [url=http://biaxin.fun/]biaxin clarithromycin[/url] [url=http://metformin.wiki/]buy glucophage online[/url] [url=http://azithromycin.ink/]buy azithromycin over the counter usa[/url] [url=http://robaxin.site/]robaxin price uk[/url] [url=http://metformin.moscow/]average cost of metformin[/url]
SueCounk · September 6, 2022 at 3:48 pm
[url=http://erectafil.fun/]erectafil[/url]
RodneyTab · September 6, 2022 at 4:06 pm
[url=https://cialismtabs.monster/]tadalafil medicine[/url]
MichaelGuabe · September 6, 2022 at 4:07 pm
[url=http://permethrin.xyz/]elimite cream over the counter[/url]
YonCounk · September 6, 2022 at 4:07 pm
[url=https://tenormin.fun/]atenolol 200 mg[/url]
SamCounk · September 6, 2022 at 4:13 pm
[url=http://azithromycin.business/]buy azithromycin australia[/url] [url=http://onlinedrugstore.digital/]legitimate online pharmacy usa[/url] [url=http://onlinedrugstore.fun/]rx pharmacy online 24[/url]
EyeCounk · September 6, 2022 at 4:16 pm
[url=https://prednisone.fun/]80 mg prednisone[/url] [url=https://cephalexin.xyz/]cephalexin online pharmacy[/url] [url=https://silagra.xyz/]silagra online[/url]
JudyCounk · September 6, 2022 at 4:21 pm
[url=http://levothyroxine.site/]buying synthroid in mexico[/url]
IvyCounk · September 6, 2022 at 4:26 pm
[url=http://bactrim.icu/]buy generic bactrim[/url] [url=http://silagra.xyz/]buy silagra uk[/url] [url=http://anafranil.site/]anafranil capsules[/url] [url=http://viagraftab.quest/]sildenafil 20 mg price[/url] [url=http://budesonide.fun/]budesonide brand name australia[/url] [url=http://clomid.network/]buying clomid uk[/url] [url=http://accutane.site/]accutane cost online[/url]
CarlCounk · September 6, 2022 at 4:37 pm
[url=http://ampicillin.life/]ampicillin 200mg[/url]
DavisMug · September 6, 2022 at 4:52 pm
[url=https://valtrex.site/]valtrex prices generic[/url]
DenCounk · September 6, 2022 at 4:53 pm
[url=https://onlinedrugstore.fun/]online pharmacy delivery delhi[/url]
IvyCounk · September 6, 2022 at 5:03 pm
[url=http://lasix.fun/]furosemide 20 mg canada[/url] [url=http://anafranil.site/]anafranil purchase online[/url] [url=http://sildalis.sbs/]buy sildalis[/url] [url=http://zithromax.site/]buy azithromycin online uk[/url] [url=http://motilium.fun/]motilium generic[/url]
WilliamWem · September 6, 2022 at 5:12 pm
[url=https://bupropion.cfd/]how to get bupropion[/url] [url=https://duloxetine.cfd/]cost of cymbalta 60 mg[/url] [url=https://celebrex.sbs/]celebrex 200 capsules[/url] [url=https://propecia.moscow/]propecia price comparison uk[/url] [url=https://allopurinol.site/]allopurinol 1000mg[/url] [url=https://avodart.site/]avodart generic[/url] [url=https://sildenafil.ink/]where to buy female viagra in australia[/url] [url=https://metformin.moscow/]can i buy metformin in mexico[/url]
Davidhup · September 6, 2022 at 5:29 pm
[url=http://doxycycline.party/]doxycycline 20 mg cost[/url]
RichardFaply · September 6, 2022 at 5:31 pm
[url=https://diflucan.fun/]buying diflucan[/url] [url=https://bactrim.site/]bactrim purchase[/url] [url=https://cialismtabs.monster/]cialis 800mg[/url] [url=https://ciprofloxacin.xyz/]ciprofloxacin 500mg tablets[/url] [url=https://tadacip.fun/]tadacip paypal[/url] [url=https://paxil.site/]generic of paxil[/url] [url=https://chloroquine.fun/]order aralen online[/url]
MichaelDwego · September 6, 2022 at 5:46 pm
[url=https://celebrex.sbs/]celebrex prices usa[/url]
JaneCounk · September 6, 2022 at 5:53 pm
[url=http://amoxil.fun/]amoxicillin 250 5 mg[/url]
KimCounk · September 6, 2022 at 6:06 pm
[url=https://clomid.network/]where can i purchase clomid[/url]
Curtisvibia · September 6, 2022 at 6:36 pm
[url=https://albenza.xyz/]albendazole 400 mg cost[/url]
AmyCounk · September 6, 2022 at 6:43 pm
[url=http://strattera.today/]generic for strattera[/url]
NickCounk · September 6, 2022 at 6:45 pm
[url=http://toradol.today/]toradol for headache[/url]
AshCounk · September 6, 2022 at 6:46 pm
[url=https://priligy.store/]cheap priligy online[/url] [url=https://amitriptyline.works/]amitriptyline 50 mg tablet[/url]
MarkCounk · September 6, 2022 at 6:48 pm
[url=https://zithromax.site/]zithromax 600 mg tablets[/url]
BooCounk · September 6, 2022 at 6:50 pm
[url=https://vermox.best/]vermox for sale online[/url]
JaneCounk · September 6, 2022 at 6:55 pm
[url=http://erectafil.fun/]buy erectafil[/url]
CarlCounk · September 6, 2022 at 7:18 pm
[url=http://viagraftab.quest/]how to get viagra in us[/url]
MarvinZem · September 6, 2022 at 7:29 pm
[url=http://mebendazole.cfd/]vermox sale canada[/url]
AnnaCounk · September 6, 2022 at 7:34 pm
[url=http://cialisrtab.monster/]cialis no prescription canada[/url]
NickCounk · September 6, 2022 at 7:44 pm
[url=http://albendazole.sbs/]albendazoleoverthecounter.com[/url]
BooCounk · September 6, 2022 at 7:48 pm
[url=https://triamterenegen.com/]triamterene discount[/url]
IvyCounk · September 6, 2022 at 8:01 pm
[url=http://silagra.fun/]silagra canada[/url] [url=http://prozac.capetown/]fluoxetine 40 mg daily[/url] [url=http://lisinopril.media/]prinivil 10 mg[/url] [url=http://lasix.boutique/]buy furosemide uk[/url] [url=http://onlinedrugstore.digital/]online pet pharmacy[/url] [url=http://doxycycline.fun/]how to get doxycycline prescription[/url] [url=http://motilium.fun/]where can i buy motilium[/url]
Samuelraisk · September 6, 2022 at 8:04 pm
[url=https://bupropion.cfd/]can you buy wellbutrin without a prescription usa[/url]
Jameseloro · September 6, 2022 at 8:13 pm
[url=https://albenza.xyz/]albendazole brand name[/url] [url=https://permethrin.xyz/]elimite 5[/url] [url=https://chloroquine.fun/]chloroquine coronavirus[/url] [url=https://trazodone.media/]trazodone 100 mg tablet[/url]
Estebanguall · September 6, 2022 at 8:17 pm
[url=https://trazodone.media/]trazodone discount[/url]
DenCounk · September 6, 2022 at 8:18 pm
[url=https://bupropion.site/]bupropion uk online[/url]
BooCounk · September 6, 2022 at 8:20 pm
[url=https://dutasteride.store/]generic brand of avodart[/url]
BooCounk · September 6, 2022 at 8:21 pm
[url=https://buyalbuterol.store/]ventolin cost australia[/url]
ZakCounk · September 6, 2022 at 8:44 pm
[url=https://clomid.site/]where to buy clomid canada[/url] [url=https://toradol.today/]toradol for sale canada[/url] [url=https://doxycycline.joburg/]doxycycline 40 mg capsule[/url] [url=https://isotretinoin.fun/]buy accutane online fast delivery[/url] [url=https://atarax.click/]atarax over the counter uk[/url] [url=https://prozac.capetown/]prozac 60 mg capsule[/url] [url=https://vardenafil.live/]brand name levitra online[/url] [url=https://trimox.xyz/]cheapest price for amoxicillin 500mg[/url]
MichaelGuabe · September 6, 2022 at 9:13 pm
[url=http://cialismtabs.monster/]online pharmacy cialis 20 mg[/url]
MarkCounk · September 6, 2022 at 9:18 pm
[url=https://escitalopram.cfd/]lexapro 60 mg[/url]
DavisMug · September 6, 2022 at 9:22 pm
[url=https://allopurinol.site/]where to buy cheap allopurinol[/url]
JackCounk · September 6, 2022 at 9:24 pm
[url=https://amoxicillin.joburg/]trimox 250 mg[/url]
MaryCounk · September 6, 2022 at 9:26 pm
[url=https://amoxicillin.joburg/]augmentin 2g[/url] [url=https://cialisrtab.monster/]best price for cialis 10mg[/url] [url=https://onlinedrugstore.xyz/]reputable indian online pharmacy[/url]
YonCounk · September 6, 2022 at 9:27 pm
[url=https://lisinopril.media/]25 mg lisinopril[/url]
ZakCounk · September 6, 2022 at 9:28 pm
[url=https://hydroxychloroquine.tech/]quineprox 40[/url] [url=https://onlinedrugstore.fun/]bitcoin pharmacy online[/url] [url=https://viagraftab.quest/]price of generic viagra in canada[/url] [url=https://albendazole.sbs/]albendazole cheap[/url] [url=https://onlinedrugstore.digital/]rx pharmacy online 24[/url]
SamCounk · September 6, 2022 at 9:30 pm
[url=http://trimox.xyz/]amoxicillin 875 mg capsule[/url] [url=http://prozac.capetown/]prozac online prescription[/url] [url=http://accutane.site/]accutane canada[/url] [url=http://amoxil.fun/]can you buy amoxicillin over the counter[/url] [url=http://ampicillin.life/]ampicillin 250[/url] [url=http://cialisitabs.quest/]best buy cialis online[/url] [url=http://budesonide.fun/]budesonide 25[/url] [url=http://clomid.site/]clomid pills otc[/url]
DarrylSef · September 6, 2022 at 9:36 pm
[url=http://valtrex.site/]valtrex cost generic[/url] [url=http://cialisrtabs.quest/]cialis cost australia[/url] [url=http://viagraptab.quest/]female viagra pill buy online canada[/url]
RichardFaply · September 6, 2022 at 9:39 pm
[url=https://disulfiram.site/]antabuse where to buy[/url] [url=https://propecia.moscow/]propecia canada buy[/url]
WilliamWem · September 6, 2022 at 9:40 pm
[url=https://zithromax.fun/]zithromax 1000 mg pills[/url] [url=https://paxil.site/]price of paroxetine[/url]
Samuelraisk · September 6, 2022 at 9:47 pm
[url=https://femaleviagra.monster/]1 viagra pill[/url]
Samuelraisk · September 6, 2022 at 9:48 pm
[url=https://sildenafil.ink/]rx viagra[/url]
IvyCounk · September 6, 2022 at 10:07 pm
[url=http://cialisrtab.monster/]5mg tadalafil online[/url] [url=http://doxycycline.joburg/]doxycycline 40 mg capsules[/url] [url=http://albendazole.sbs/]albendazole 400[/url] [url=http://prednisone.fun/]buy prednisone online from mexico[/url] [url=http://doxycycline.fun/]doxylin[/url] [url=http://toradol.today/]toradol for tooth pain[/url] [url=http://clomid.site/]clomid for men[/url]
KimCounk · September 6, 2022 at 10:08 pm
[url=https://strattera.today/]strattera canadian pharmacy[/url]
UgoCounk · September 6, 2022 at 10:18 pm
[url=http://viagrahtab.shop/]viagra tablet cost[/url]
IvyCounk · September 6, 2022 at 10:29 pm
[url=http://onlinedrugstore.fun/]canadian pharmacy 1 internet online drugstore[/url] [url=http://trimox.xyz/]amoxicillin prices in india[/url]
RobertFoold · September 6, 2022 at 10:37 pm
[url=https://avodart.site/]avodart soft capsules 0.5 mg[/url]
WimCounk · September 6, 2022 at 10:46 pm
[url=http://viagradtab.monster/]vigara[/url]
JaneCounk · September 6, 2022 at 10:48 pm
[url=http://onlinedrugstore.xyz/]www canadapharmacy com[/url]
JimCounk · September 6, 2022 at 10:55 pm
[url=https://strattera.click/]atomoxetine[/url]
Curtisvibia · September 6, 2022 at 11:02 pm
[url=https://vardenafil.life/]online levitra in canada[/url]
ElwoodGon · September 6, 2022 at 11:11 pm
[url=http://viagraetab.quest/]canada rx sildenafil[/url]
Charlesaduse · September 6, 2022 at 11:13 pm
[url=http://mebendazole.cfd/]vermox tablets south africa[/url]
TimothyThive · September 6, 2022 at 11:44 pm
[url=http://cialisktabs.quest/]cheapest generic cialis online[/url]
MarkCounk · September 6, 2022 at 11:51 pm
[url=https://accutane.site/]accutane 120 mg[/url]
SueCounk · September 6, 2022 at 11:56 pm
[url=http://prozac.capetown/]prozac 10 mg cost[/url]
ElwoodGon · September 6, 2022 at 11:58 pm
[url=http://chloroquine.fun/]chloroquine 600 mg[/url]
Charlesaduse · September 7, 2022 at 12:35 am
[url=http://zoloft.ink/]buy zoloft canada[/url]
AshCounk · September 7, 2022 at 12:46 am
[url=https://arimidex.store/]arimidex cost australia[/url] [url=https://accutane.boutique/]price for generic accutane[/url] [url=https://anafranil.quest/]buy anafranil online australia[/url] [url=https://cytotec.digital/]cytotec pills price in south africa[/url]
MaryCounk · September 7, 2022 at 12:46 am
[url=https://lasix.fun/]furosemide brand name[/url] [url=https://prednisone.fun/]2.5 mg prednisone[/url] [url=https://lisinopril.media/]can i buy lisinopril in mexico[/url]
RicIsose · September 7, 2022 at 12:48 am
[url=http://azithromycin.ink/]cheap zithromax[/url] [url=http://hydroxychloroquine.mom/]hydroxychloroquine buy online uk[/url] [url=http://metformin.moscow/]glucophage mastercard[/url] [url=http://bactrim.site/]buy bactrim uk[/url] [url=http://viagraptab.quest/]viagra purchase australia[/url] [url=http://propranolol.life/]propranolol 80 mg capsules[/url] [url=http://propecia.moscow/]how to order propecia[/url] [url=http://metformin.wiki/]glucophage 750[/url]
JackCounk · September 7, 2022 at 12:48 am
[url=https://celecoxib.fun/]celebrex brand in india[/url]
JaneCounk · September 7, 2022 at 12:51 am
[url=http://lisinopril.media/]lisinopril 10 mg for sale[/url]
JoeCounk · September 7, 2022 at 12:53 am
[url=https://cialisrtab.monster/]purchase cialis for daily use[/url] [url=https://prednisone.fun/]200 mg prednisone daily[/url] [url=https://amoxicillin.joburg/]buy augmentin 875[/url] [url=https://effexor.life/]effexor 150 mg coupon[/url] [url=https://levothyroxine.site/]75 mg synthroid without prescription[/url] [url=https://azithromycin.business/]buy azithromycin india[/url]
EyeCounk · September 7, 2022 at 12:56 am
[url=https://cialisrtab.monster/]buy cialis online us pharmacy[/url] [url=https://cialisitabs.quest/]cialis online singapore[/url]
WilliamWem · September 7, 2022 at 1:00 am
[url=https://permethrin.xyz/]generic acticin cream[/url] [url=https://tadacip.fun/]canadian tadacip[/url] [url=https://tizanidine.xyz/]zanaflex 4 mg without prescription[/url] [url=https://doxycycline.party/]doxycycline 20 mg[/url] [url=https://sildenafil.ink/]viagra prescription uk[/url] [url=https://metformin.moscow/]metformin glucophage[/url] [url=https://metformin.wiki/]metformin 500mg er[/url]
ElwoodGon · September 7, 2022 at 1:09 am
[url=http://bactrim.site/]bactrim uk[/url]
RodneyTab · September 7, 2022 at 1:37 am
[url=https://azithromycin.ink/]buy zithromax in usa[/url]
BooCounk · September 7, 2022 at 1:38 am
[url=https://gabapentin.digital/]gabapentin 800 mg[/url]
RodneyTab · September 7, 2022 at 1:46 am
[url=https://avodart.site/]generic for avodart medication[/url]
TommyHepsy · September 7, 2022 at 1:47 am
[url=http://lexapro.sbs/]cipralex medication[/url]
SamCounk · September 7, 2022 at 1:47 am
[url=http://onlinedrugstore.digital/]canadian mail order pharmacy[/url] [url=http://vardenafil.live/]online pharmacy usa levitra[/url] [url=http://bupropion.site/]buy zyban australia[/url] [url=http://azithromycin.business/]azithromycin z-pack[/url] [url=http://gabapentin.xyz/]buy gabapentin 800 mg online[/url] [url=http://zofran.fun/]purchase zofran[/url] [url=http://viagraftab.quest/]can i order viagra online in canada[/url]
SamCounk · September 7, 2022 at 2:01 am
[url=http://prozac.capetown/]fluoxetine hcl 20mg[/url] [url=http://lexapro.today/]lexapro prescription cost[/url] [url=http://lisinopril.media/]lisinopril 20 mg daily[/url] [url=http://azithromycin.business/]buy zithromax without presc[/url] [url=http://strattera.click/]strattera 60 mg cap[/url] [url=http://dexamethasone.fun/]dexona 0.5 mg price[/url] [url=http://onlinedrugstore.digital/]safe online pharmacy[/url]
TimothyThive · September 7, 2022 at 2:02 am
[url=http://disulfiram.site/]antabuse no prescription[/url]
MarkCounk · September 7, 2022 at 2:08 am
[url=https://prednisone.fun/]buy prednisone mexico[/url]
Michaeldrist · September 7, 2022 at 2:50 am
[url=http://hydroxychloroquine.download/]hydroxychloroquine where to buy[/url]
AlanCounk · September 7, 2022 at 3:03 am
[url=http://trimox.xyz/]buy amoxicillin 500 without prescription[/url] [url=http://albendazole.sbs/]albenza cost[/url] [url=http://lasix.boutique/]lasix uk buy[/url] [url=http://cialisrtab.monster/]can you buy generic cialis in canada[/url] [url=http://zithromax.site/]buying zithromax[/url] [url=http://clomid.network/]average price of clomid[/url]
TeoCounk · September 7, 2022 at 3:08 am
[url=https://tenormin.fun/]tenormin brand name[/url]
EyeCounk · September 7, 2022 at 3:14 am
[url=https://accutane.site/]accutane 10 mg[/url] [url=https://hydroxychloroquine.tech/]hydroxychloroquine tablets[/url] [url=https://erectafil.fun/]erectafil 10[/url] [url=https://cephalexin.xyz/]how much is cephalexin 500 mg[/url] [url=https://onlinedrugstore.xyz/]wholesale pharmacy[/url]
TimothyThive · September 7, 2022 at 3:18 am
[url=http://metformin.wiki/]metformin 397[/url]
NickCounk · September 7, 2022 at 3:18 am
[url=http://doxycycline.fun/]discount doxycycline[/url]
TedCounk · September 7, 2022 at 4:15 am
[url=https://levothyroxine.site/]synthroid 500 mcg[/url]
AnnaCounk · September 7, 2022 at 4:27 am
[url=http://silagra.fun/]silagra 50 mg tablet[/url]
MichaelGuabe · September 7, 2022 at 4:46 am
[url=http://hydroxychloroquine.mom/]plaquenil cheapest[/url]
AmyCounk · September 7, 2022 at 4:57 am
[url=http://viagraftab.quest/]how much is viagra cost[/url]
JoeCounk · September 7, 2022 at 5:29 am
[url=https://clomid.site/]clomid purchase canada[/url] [url=https://cialisitabs.quest/]generic tadalafil 40 mg[/url] [url=https://lasix.fun/]lasix 10 mg tablet[/url] [url=https://strattera.today/]strattera pills for sale[/url] [url=https://accutane.site/]generic accutane cost[/url] [url=https://onlinedrugstore.fun/]best online thai pharmacy[/url]
MiclTek · September 7, 2022 at 5:34 am
[url=http://allopurinol.site/]allopurinol 300 mg for sale without prescription[/url]
JaneCounk · September 7, 2022 at 5:43 am
[url=http://arimidex.cfd/]arimidex price canada[/url]
TommyHepsy · September 7, 2022 at 5:52 am
[url=http://azithromycin.ink/]buy azithromycin over the counter canada[/url]
IvyCounk · September 7, 2022 at 5:52 am
[url=http://strattera.click/]strattera 40 mg pharmacy[/url] [url=http://dexamethasone.fun/]dexamethasone drug[/url]
SamCounk · September 7, 2022 at 5:54 am
[url=http://atarax.click/]atarax 10mg cost[/url] [url=http://azithromycin.business/]azithromycin in canada[/url] [url=http://hydroxychloroquine.tech/]plaquenil 500 mg[/url] [url=http://amoxil.fun/]amoxicillin 500 mg buy online[/url] [url=http://tenormin.fun/]atenolol 25 mg for sale[/url] [url=http://cephalexin.xyz/]where to buy keflex[/url] [url=http://amoxicillin.joburg/]buy cheap amoxil[/url] [url=http://cialisrtab.monster/]cialis without rx[/url]
JaneCounk · September 7, 2022 at 5:57 am
[url=http://doxycycline.fun/]doxycycline for sale online[/url]
JasonCounk · September 7, 2022 at 6:03 am
[url=https://cialisitabs.quest/]generic tadalafil[/url]
ElwoodGon · September 7, 2022 at 6:04 am
[url=http://cialisrtabs.quest/]buy cialis online 20mg[/url]
JosephMaict · September 7, 2022 at 6:37 am
[url=http://duloxetine.cfd/]cymbalta 100mg[/url] [url=http://sildenafil.ink/]viagra without a prescription[/url] [url=http://zithromax.fun/]azithromycin 10 pills[/url] [url=http://trazodone.media/]trazodone 100[/url] [url=http://albenza.xyz/]albendazole buy canada[/url]
ElwoodGon · September 7, 2022 at 6:42 am
[url=http://femaleviagra.monster/]viagra buy india[/url]
MiclTek · September 7, 2022 at 6:51 am
[url=http://lexapro.sbs/]cipralex india[/url]
Charlesaduse · September 7, 2022 at 7:10 am
[url=http://sildenafil.ink/]buy sildenafil in usa[/url]
JaneCounk · September 7, 2022 at 7:11 am
[url=http://tenormin.fun/]atenolol best price[/url]
SueCounk · September 7, 2022 at 7:11 am
[url=http://cialisitabs.quest/]cialis 40mg india[/url]
EyeCounk · September 7, 2022 at 7:28 am
[url=https://silagra.fun/]silagra price in india[/url] [url=https://vardenafil.live/]buy vardenafil uk[/url] [url=https://doxycycline.joburg/]doxycycline 20 mg price[/url] [url=https://amoxicillin.joburg/]can you buy amoxicillin over the counter in canada[/url] [url=https://amoxil.fun/]buy amoxicillin 500mg no prescription[/url] [url=https://tenormin.fun/]atenolol 15 mg[/url] [url=https://clomid.site/]clomid male[/url]
AshCounk · September 7, 2022 at 7:30 am
[url=https://doxycyclina.online/]doxycycline price usa[/url] [url=https://celebrex.today/]celebrex in canada[/url] [url=https://tretinoin.guru/]order tretinoin online[/url] [url=https://triamterenedyrenium.monster/]triamterene diuretic[/url] [url=https://bbspharm.com/]where can you get prednisone[/url] [url=https://zanaflex.store/]zanaflex 4mg tablets[/url] [url=https://benicar.digital/]benicar 20 mg coupon[/url]
WimCounk · September 7, 2022 at 7:34 am
[url=http://gabapentin.directory/]neurontin 900[/url]
Curtisvibia · September 7, 2022 at 7:42 am
[url=https://permethrin.xyz/]elimite generic[/url]
ElwoodGon · September 7, 2022 at 7:45 am
[url=http://cialisetabs.monster/]tadalafil 5mg tablets india[/url]
MichaelDwego · September 7, 2022 at 8:14 am
[url=https://cialismtabs.monster/]cialis gel uk[/url]
NickCounk · September 7, 2022 at 8:26 am
[url=http://zithromax.site/]zithromax capsules buy[/url]
LisaCounk · September 7, 2022 at 8:34 am
[url=https://anafranil.site/]25 mg anafranil online[/url]
MarvinZem · September 7, 2022 at 8:38 am
[url=http://propecia.moscow/]finasteride 1mg over the counter[/url]
Jameseloro · September 7, 2022 at 8:39 am
[url=https://disulfiram.fun/]disulfiram 500 mg tablet[/url] [url=https://disulfiram.site/]antabuse price canada[/url] [url=https://wellbutrin.fun/]bupropion sr 100mg[/url] [url=https://azithromycin.ink/]azithromycin 250 mg for sale[/url] [url=https://ciprofloxacin.xyz/]how much is ciprofloxacin[/url] [url=https://celebrex.sbs/]generic celebrex 200mg[/url] [url=https://avodart.site/]avodart medicine order[/url] [url=https://hydroxychloroquine.mom/]hydroxychloroquine virus[/url]
MiclTek · September 7, 2022 at 8:48 am
[url=http://cialisetabs.monster/]cialis cost 20mg[/url]
UgoCounk · September 7, 2022 at 8:54 am
[url=http://orlistat.guru/]over the counter orlistat canada[/url]
WilliamWem · September 7, 2022 at 8:58 am
[url=https://wellbutrin.fun/]wellbutrin cost generic[/url] [url=https://cialisetabs.monster/]where to buy generic cialis in usa[/url] [url=https://bactrim.site/]bactrim 800 mg price[/url] [url=https://mebendazole.cfd/]vermox medication in south africa[/url]
Estebanguall · September 7, 2022 at 9:01 am
[url=https://viagraetab.quest/]can i purchase viagra over the counter in canada[/url]
Michaeldrist · September 7, 2022 at 9:02 am
[url=http://hydroxychloroquine.download/]plaquenil cost canada[/url]
Jameseloro · September 7, 2022 at 9:03 am
[url=https://viagraptab.quest/]viagra comparison prices[/url] [url=https://disulfiram.site/]antabuse ordering[/url] [url=https://albenza.xyz/]albendazole prescription[/url] [url=https://propranolol.life/]drug propranolol[/url]
UgoCounk · September 7, 2022 at 9:23 am
[url=http://cymbalta.shop/]buy cymbalta usa[/url]
IvyCounk · September 7, 2022 at 9:27 am
[url=http://zithromax.site/]zithromax brand name[/url] [url=http://onlinedrugstore.fun/]sky pharmacy[/url] [url=http://azithromycin.business/]brand name azithromycin[/url] [url=http://erectafil.fun/]erectafil 20 mg[/url] [url=http://celecoxib.fun/]celebrex over the counter canada[/url] [url=http://doxycycline.fun/]doxycycline 100mg capsules cost[/url] [url=http://silagra.xyz/]buy silagra[/url]
ElwoodGon · September 7, 2022 at 9:28 am
[url=http://chloroquine.fun/]chloroquine brand[/url]
TommyHepsy · September 7, 2022 at 9:29 am
[url=http://valtrex.site/]purchase valtrex canada[/url]
MiclTek · September 7, 2022 at 9:38 am
[url=http://sildenafil.ink/]viagra – uk[/url]
AshCounk · September 7, 2022 at 9:51 am
[url=https://levofloxacin.life/]levaquin 750 mg[/url] [url=https://triamterene.store/]generic triamterene[/url] [url=https://retina.sale/]generic retin a 5[/url] [url=https://toradol.store/]toradol pain shot[/url] [url=https://ventolin.store/]ventolin inhalers[/url] [url=https://hydrochlorothiazide.digital/]amlodipine hydrochlorothiazide[/url] [url=https://buyvardenafil.digital/]levitra 20mg price in usa[/url]
JoeCounk · September 7, 2022 at 9:54 am
[url=https://dexamethasone.fun/]dexamethasone 15 mg[/url] [url=https://isotretinoin.fun/]buy accutane 20mg[/url] [url=https://doxycycline.joburg/]buy doxycycline 200 mg[/url] [url=https://vardenafil.live/]average price of levitra[/url] [url=https://viagraftab.quest/]buy cheap viagra uk[/url] [url=https://bactrim.icu/]bactrim 80 mg[/url]
IvyCounk · September 7, 2022 at 9:58 am
[url=http://prednisone.fun/]prednisone 5 mg pill[/url] [url=http://onlinedrugstore.xyz/]online pharmacy without scripts[/url] [url=http://arimidex.cfd/]arimidex buy canada[/url] [url=http://toradol.today/]toradol generic[/url] [url=http://azithromycin.business/]antibiotic azithromycin[/url] [url=http://motilium.fun/]where can you buy motilium[/url] [url=http://atarax.click/]cost of atarax 25mg[/url]
Michaeldrist · September 7, 2022 at 9:59 am
[url=http://cialismtabs.monster/]tadalafil canada 20mg[/url]
NickCounk · September 7, 2022 at 10:02 am
[url=http://effexor.life/]effexor 75 mg cost[/url]
TommyHepsy · September 7, 2022 at 10:10 am
[url=http://vardenafil.life/]where can i buy generic levitra[/url]
ElwoodGon · September 7, 2022 at 10:26 am
[url=http://zoloft.ink/]zoloft nz[/url]
AlanCounk · September 7, 2022 at 10:38 am
[url=http://effexor.life/]generic effexor online[/url] [url=http://lasix.boutique/]buy lasix without presciption[/url] [url=http://accutane.site/]how to get accutane without prescription[/url] [url=http://prozac.capetown/]fluoxetine 60 mg price in india[/url] [url=http://tenormin.fun/]atenolol 300 mg[/url] [url=http://hydroxychloroquine.tech/]plaquenil 2 mg[/url] [url=http://viagraftab.quest/]best generic sildenafil[/url] [url=http://zofran.fun/]zofran 4 mg tablet price[/url]
Edgarlor · September 7, 2022 at 10:39 am
[url=https://zoloft.ink/]buy zoloft online australia[/url]
JasonCounk · September 7, 2022 at 10:49 am
[url=https://prednisone.fun/]prednizone for sale[/url]
PaulCounk · September 7, 2022 at 10:59 am
[url=https://albendazole.sbs/]where can i buy albendazole over the counter[/url]
Michaeldrist · September 7, 2022 at 11:15 am
[url=http://diflucan.fun/]diflucan buy[/url]
Edgarlor · September 7, 2022 at 11:17 am
[url=https://ciprofloxacin.xyz/]cipro tablet price[/url]
SueCounk · September 7, 2022 at 11:41 am
[url=http://hydroxychloroquine.tech/]hydroxychloroquine sulfate tab 200 mg[/url]
CarlCounk · September 7, 2022 at 11:48 am
[url=http://onlinedrugstore.fun/]online pharmacy china[/url]
TommyHepsy · September 7, 2022 at 11:57 am
[url=http://trazodone.media/]can i order trazodone online[/url]
MiclTek · September 7, 2022 at 12:01 pm
[url=http://benicar.site/]benicar price in india[/url]
Michaeldrist · September 7, 2022 at 12:02 pm
[url=http://bupropion.cfd/]zyban 150 mg cost[/url]
MiclTek · September 7, 2022 at 12:02 pm
[url=http://clonidine.fun/]clonidine canada[/url]
DarrylSef · September 7, 2022 at 12:13 pm
[url=http://paxil.site/]best generic paroxetine[/url] [url=http://neurontin.click/]neurontin coupon[/url] [url=http://lexapro.sbs/]lexapro 10 mg for sale[/url] [url=http://biaxin.fun/]biaxin uti[/url] [url=http://gabapentin.site/]neurontin 300 mg pill[/url]
RodneyTab · September 7, 2022 at 12:22 pm
[url=https://robaxin.site/]robaxin muscle relaxant[/url]
MarvinZem · September 7, 2022 at 12:24 pm
[url=http://chloroquine.fun/]chloroquine phosphate online[/url]
Michaelemult · September 7, 2022 at 12:27 pm
[url=https://metformin.moscow/]metformin 1000[/url]
MichaelGuabe · September 7, 2022 at 12:40 pm
[url=http://femaleviagra.monster/]sildenafil 25[/url]
Estebanguall · September 7, 2022 at 12:46 pm
[url=https://propecia.moscow/]generic propecia australia[/url]
JackCounk · September 7, 2022 at 12:57 pm
[url=https://dexamethasone.fun/]dexamethasone cream over the counter[/url]
Jameseloro · September 7, 2022 at 12:59 pm
[url=https://celebrex.sbs/]celebrex uk cost[/url] [url=https://tadacip.fun/]buy tadacip 10[/url]
SueCounk · September 7, 2022 at 1:04 pm
[url=http://clomid.network/]clomid 25mg for sale[/url]
AshCounk · September 7, 2022 at 1:05 pm
[url=https://tretinoin.guru/]0.05 retin a cream[/url] [url=https://hydroxychloroquine.agency/]buy hydroxychloroquine online[/url] [url=https://hydroxychloroquine.media/]plaquenil for ra[/url] [url=https://buspar.boutique/]can i buy buspar online[/url] [url=https://dapoxetine.digital/]priligy buy online cheap[/url] [url=https://prozac.digital/]fluoxetine 10 mg price[/url] [url=https://accutane.best/]accutane 2009[/url]
SamCounk · September 7, 2022 at 1:12 pm
[url=http://celecoxib.fun/]buy celebrex canada[/url] [url=http://erectafil.fun/]erectafil 40[/url] [url=http://effexor.life/]price of effexor xr[/url] [url=http://budesonide.fun/]budesonide brand name[/url]
JosephMaict · September 7, 2022 at 1:33 pm
[url=http://valtrex.site/]valtrex medication[/url] [url=http://viagraetab.quest/]where can i buy female viagra pill[/url] [url=http://viagraptab.quest/]buy viagra online india 100mg[/url]
CarlCounk · September 7, 2022 at 1:35 pm
[url=http://vardenafil.live/]levitra tabs[/url]
Michaeldrist · September 7, 2022 at 1:39 pm
[url=http://benicar.site/]benicar 20 mg generic[/url]
SueCounk · September 7, 2022 at 1:40 pm
[url=http://bactrim.icu/]bactrim 480[/url]
DavisMug · September 7, 2022 at 2:01 pm
[url=https://lexapro.sbs/]buying lexapro without a prescription[/url]
SueCounk · September 7, 2022 at 2:06 pm
[url=http://doxycycline.fun/]100 mg doxycycline[/url]
SamCounk · September 7, 2022 at 2:34 pm
[url=http://effexor.life/]pharmacy prices for generic effexor[/url] [url=http://doxycycline.joburg/]doxycycline prescription coupon[/url]
BooCounk · September 7, 2022 at 2:37 pm
[url=https://amoxicillin.best/]augmentin 875 otc[/url]
SueCounk · September 7, 2022 at 2:45 pm
[url=http://ampicillin.life/]ampicillin 2g[/url]
Estebanguall · September 7, 2022 at 2:54 pm
[url=https://biaxin.fun/]biaxin prescription[/url]
WimCounk · September 7, 2022 at 2:57 pm
[url=http://lyrica.best/]800 mg lyrica[/url]
IvyCounk · September 7, 2022 at 3:07 pm
[url=http://isotretinoin.fun/]buy acutane[/url] [url=http://dexamethasone.fun/]dexamethasone 2mg tablets[/url] [url=http://budesonide.fun/]budesonide 200 mcg[/url] [url=http://silagra.fun/]silagra 100mg[/url] [url=http://anafranil.site/]anafranil clomipramine[/url] [url=http://amoxicillin.joburg/]amoxicillin canada[/url] [url=http://bactrim.icu/]bactrim tablets 400mg 80mg[/url]
KimCounk · September 7, 2022 at 3:15 pm
[url=https://levothyroxine.site/]online pharmacy synthroid[/url]
WimCounk · September 7, 2022 at 3:18 pm
[url=http://chloroquine.quest/]aralen buy it[/url]
WimCounk · September 7, 2022 at 3:21 pm
[url=http://isotretinoin.online/]accutane from mexico[/url]
Michaelemult · September 7, 2022 at 3:22 pm
[url=https://clonidine.fun/]clonidine cost[/url]
TedCounk · September 7, 2022 at 3:25 pm
[url=https://ampicillin.life/]ampicillin tablet price in india[/url]
MiclTek · September 7, 2022 at 3:33 pm
[url=http://cialismtabs.monster/]can i buy cialis online[/url]
TimothyThive · September 7, 2022 at 3:50 pm
[url=http://duloxetine.xyz/]cost of cymbalta[/url]
RobertFoold · September 7, 2022 at 3:53 pm
[url=https://viagraptab.quest/]viagra pills without prescription[/url]
JosephMaict · September 7, 2022 at 3:59 pm
[url=http://viagraptab.quest/]sildenafil 25 mg uk[/url] [url=http://permethrin.xyz/]generic elimite cream[/url]
TommyHepsy · September 7, 2022 at 4:04 pm
[url=http://bactrim.site/]bactrim nz[/url]
RodneyTab · September 7, 2022 at 4:06 pm
[url=https://diflucan.fun/]diflucan online purchase[/url]
JimCounk · September 7, 2022 at 4:08 pm
[url=https://doxycycline.joburg/]can you buy doxycycline[/url]
JaneCounk · September 7, 2022 at 4:24 pm
[url=http://cialisrtab.monster/]cialis 20 mg[/url]
Edgarlor · September 7, 2022 at 4:34 pm
[url=https://lexapro.sbs/]buy lexapro cheap no prescription[/url]
AlanCounk · September 7, 2022 at 4:38 pm
[url=http://levothyroxine.site/]synthroid purchase online[/url] [url=http://tenormin.fun/]atenolol chlorthalidone[/url] [url=http://budesonide.fun/]buy budesonide[/url] [url=http://vardenafil.live/]levitra tablet online in india[/url] [url=http://prozac.capetown/]order fluoxetine online[/url]
TimothyThive · September 7, 2022 at 5:00 pm
[url=http://clonidine.fun/]clonidine for depression[/url]
Estebanguall · September 7, 2022 at 5:17 pm
[url=https://celebrex.sbs/]celebrex 100mg price[/url]
ElwoodGon · September 7, 2022 at 5:19 pm
[url=http://viagraptab.quest/]viagra canadian pharmacy paypal[/url]
DarrylSef · September 7, 2022 at 5:40 pm
[url=http://zoloft.ink/]zoloft medicine price[/url] [url=http://ciprofloxacin.xyz/]how to order cipro[/url] [url=http://hydroxychloroquine.mom/]generic plaquenil cost[/url] [url=http://neurontin.click/]800 mg gabapentin price[/url] [url=http://femaleviagra.monster/]lowest cost viagra online[/url] [url=http://sildenafil.ink/]sildenafil us pharmacy[/url] [url=http://cialisetabs.monster/]10mg cialis online[/url] [url=http://azithromycin.ink/]azithromycin canada[/url]
JasonCounk · September 7, 2022 at 5:53 pm
[url=https://cephalexin.xyz/]how to get cephalexin[/url]
KimCounk · September 7, 2022 at 5:59 pm
[url=https://dexamethasone.fun/]dexamethasone 16 mg[/url]
BooCounk · September 7, 2022 at 6:01 pm
[url=https://abilify.quest/]price of abilify 5mg[/url]
ElwoodGon · September 7, 2022 at 6:05 pm
[url=http://cialismtabs.monster/]cheapest price for cialis 5mg[/url]
IvyCounk · September 7, 2022 at 6:16 pm
[url=http://anafranil.site/]anafranil for dogs[/url] [url=http://celecoxib.fun/]celebrex 200 capsules[/url] [url=http://sildalis.sbs/]buy sildalis 120 mg[/url] [url=http://strattera.today/]strattera 14 mg[/url] [url=http://prozac.capetown/]fluoxetine price uk[/url]
AshCounk · September 7, 2022 at 9:10 pm
[url=https://tizanidine.digital/]zanaflex otc[/url] [url=https://chloroquinegenuine.com/]chloroquine 300[/url]
Samuelraisk · September 7, 2022 at 9:56 pm
[url=http://lasix.ink/]lasix 60 mg daily[/url]
EyeCounk · September 8, 2022 at 2:00 am
[url=http://cialis40mgwithnorx.quest/]retail price of cialis[/url] [url=http://prednisone.download/]predizone with out a percription[/url] [url=http://zoloft.today/]generic zoloft no prescription[/url] [url=http://doxycyclinetab.online/]doxycycline tablets[/url] [url=http://vardenafil.durban/]levitra canada for sale[/url] [url=http://accutane.beauty/]accutane uk for sale[/url] [url=http://canadianpharmacy.company/]rate online pharmacies[/url] [url=http://genericviagramedicinenorx.quest/]cheap viagra with prescription[/url]
JackCounk · September 8, 2022 at 4:05 am
[url=https://retinatab.online/]prescription tretinoin gel[/url]
DarrylSef · September 8, 2022 at 9:47 am
[url=https://orderviagra100mgwithnorx.monster/]buy real sildenafil online with paypal from india[/url] [url=https://pcialis.monster/]generic cialis 2018 usa[/url] [url=https://ordermodafinil.online/]1200 mg modafinil[/url] [url=https://isotretinoin.xyz/]accutane online canada[/url] [url=https://buyingbestviagratabs.quest/]us online pharmacy viagra[/url] [url=https://lasix.business/]lasix 2.5 mg[/url]
MichaelDwego · September 8, 2022 at 2:17 pm
[url=https://orderviagratabsnoprescription.quest/]buying viagra nz[/url]
TommyHepsy · September 8, 2022 at 2:53 pm
[url=http://lasix.ink/]how much is furosemide 20mg[/url]
Jameseloro · September 8, 2022 at 10:26 pm
[url=http://buyingcheapcialispillonline.monster/]tadalafil india price[/url] [url=http://cephalexin.business/]keflex 500mg prices[/url] [url=http://pharmacyonline.online/]canadian pharmacy viagra[/url] [url=http://clonidine.company/]buy cheap clonidine[/url] [url=http://buyviagra200mgonline.quest/]buy viagra in india[/url] [url=http://viagraxtab.quest/]cost of generic viagra in mexico[/url]
YonCounk · September 9, 2022 at 11:00 am
[url=https://flomax.email/]flomax uk[/url]
JaneCounk · September 9, 2022 at 1:52 pm
[url=https://celebrex.company/]celebrex cost comparison[/url]
PaulCounk · September 9, 2022 at 3:12 pm
[url=https://bestviagratabletforsale.monster/]need viagra[/url]
DarrylSef · September 9, 2022 at 6:58 pm
[url=https://orderviagratabsnoprescription.quest/]can i order viagra[/url] [url=https://lisinopriltab.online/]lisinopril 20 mg 12.5 mg[/url] [url=https://propranolol.business/]2.5 mg propranolol[/url] [url=https://ordercialis10withoutrx.monster/]generic tadalafil coupon[/url] [url=https://buyviagrapillnorx.monster/]viagra online purchase[/url] [url=https://buycheapviagra.quest/]drugstore female viagra[/url] [url=https://clonidine.company/]clonidine patch for adhd[/url] [url=https://prednisone.media/]prednisone 10mg cost[/url]
MarkCounk · September 9, 2022 at 7:21 pm
[url=https://amitriptyline.life/]elavil hair loss[/url]
RobertFoold · September 10, 2022 at 3:07 am
[url=https://trazodone.win/]trazodone medication over the counter[/url]
JackCounk · September 10, 2022 at 3:19 am
[url=https://viagra200prescription.monster/]sildenafil 20 mg price in india[/url]
AlanCounk · September 10, 2022 at 5:58 am
[url=http://lisinopril.tech/]40 mg lisinopril[/url] [url=http://viagrapriceonline.monster/]buy generic viagra 50mg online[/url] [url=http://orderviagratabwithoutprescription.quest/]sildenafil 100mg[/url]
JosephMaict · September 10, 2022 at 8:13 pm
[url=http://orderviagratabsnoprescription.quest/]viagra prescription india[/url] [url=http://buyviagrapillnorx.monster/]sildenafil 50 mg prices[/url] [url=http://amoxicillina.online/]amoxil 500 cost[/url] [url=http://cheapcialispillwithnoprescription.quest/]cialis medication cost[/url] [url=http://antabusetab.online/]antabuse without a prescription[/url]
Davidhup · September 11, 2022 at 1:35 am
[url=http://viagraqtab.monster/]viagra stores[/url]
RichardFaply · September 11, 2022 at 1:40 am
[url=https://ordercialismedstore.quest/]cost of tadalafil 20 mg[/url] [url=https://viagratabletsnoprescription.monster/]viagra online generic canada[/url] [url=https://buyviagratabnoprescription.quest/]viagra 25mg online india[/url]
SueCounk · September 11, 2022 at 1:51 am
[url=https://viagra200prescription.monster/]how much is viagra in australia[/url]
EvaCounk · September 11, 2022 at 1:11 pm
[url=http://ordercialismedicinewithnorx.monster/]cheapest tadalafil 5mg[/url]
RodneyTab · September 11, 2022 at 2:17 pm
[url=https://diclofenac.wtf/]voltaren 50 mg[/url]
CarlCounk · September 11, 2022 at 3:56 pm
[url=http://lisinopril.tattoo/]where can i buy lisinopril[/url]
NickCounk · September 11, 2022 at 8:26 pm
[url=http://ordercialismedicinewithnorx.monster/]cialis gel online[/url]
Samuelraisk · September 12, 2022 at 12:15 am
[url=http://cheapcialispillwithnoprescription.quest/]buy generic cialis pills[/url]
MichaelGuabe · September 12, 2022 at 2:37 am
[url=http://buyviagra200mgonline.quest/]cheap viagra pills online[/url]
SamCounk · September 12, 2022 at 2:40 am
[url=http://flomax.email/]flomax 0.4 mg capsules[/url] [url=http://modafinila.online/]how to get modafinil online[/url] [url=http://prednisone.download/]how much is prednisone cost[/url] [url=http://bestviagra150withnoprescription.monster/]viagra cheap canadian pharmacy[/url] [url=http://bestviagradrugwithnorx.monster/]viagra soft[/url] [url=http://lisinopril.ink/]lisinopril tablet[/url] [url=http://cialisgenerictabletdrugstore.quest/]order cialis canada[/url] [url=http://erectafiltab.online/]erectafil 20 for sale[/url]
MaryCounk · September 12, 2022 at 7:06 am
[url=https://celebrex.company/]celebrex prescription cost[/url] [url=https://lisinopril.tech/]lisinopril online without prescription[/url] [url=https://colchicine.email/]buy colchicine online canada[/url] [url=https://zoloft.today/]20 mg zoloft[/url] [url=https://orderretina.online/]retin a 05 cream for sale[/url] [url=https://genericcialistabletsorderonline.monster/]how to get generic cialis[/url] [url=https://seroquel.email/]where to buy seroquel online[/url] [url=https://erectafiltab.online/]erectafil 5 mg[/url]
TeoCounk · September 12, 2022 at 12:30 pm
[url=https://bestviagradrugwithnorx.monster/]viagra over the counter australia[/url]
RichardFaply · September 12, 2022 at 1:49 pm
[url=https://diclofenac.wtf/]diclofenac comparison[/url] [url=https://clonidine.click/]clonidine 2.0[/url] [url=https://cialis20mgtabs.quest/]cialis cheap india[/url] [url=https://azithromycin.download/]zithromax online pharmacy[/url] [url=https://lisinopril.bid/]how much is lisinopril 20 mg[/url]
WimCounk · September 12, 2022 at 2:57 pm
[url=http://vpxlpills.monster/]vpxl without prescription[/url]
SueCounk · September 12, 2022 at 6:53 pm
[url=https://genericcialistabletsorderonline.monster/]online cialis prescription canada[/url]
Curtisvibia · September 12, 2022 at 10:54 pm
[url=https://clonidine.company/]where can you get clonidine[/url]
AmyCounk · September 13, 2022 at 2:28 am
[url=http://ordercialismedicinewithnorx.monster/]cialis 5mg daily[/url]
Jameseloro · September 13, 2022 at 2:52 am
[url=http://diclofenac.wtf/]voltaren pills[/url] [url=http://celebrex.email/]best price for celebrex[/url]
Michaelemult · September 13, 2022 at 6:47 am
[url=http://lasix.ink/]buy 12.5 furosemide online[/url]
EyeCounk · September 13, 2022 at 2:15 pm
[url=http://onlineviagramedicationprescription.quest/]buy viagra discreetly[/url] [url=http://bestviagrawithoutrx.quest/]canadian pharmacy online viagra[/url]
ElwoodGon · September 13, 2022 at 6:13 pm
[url=https://modafinilztab.com/]buy modafinil online with paypal[/url]
MarkCounk · September 13, 2022 at 8:17 pm
[url=http://onlineviagraforsaleonline.monster/]sildenafil india brand name[/url]
JackCounk · September 13, 2022 at 9:00 pm
[url=https://metformina.online/]purchase metformin online[/url]
Davidhup · September 13, 2022 at 10:10 pm
[url=http://genericcialis40mgwithoutprescription.monster/]cialis buy europe[/url]
DavisMug · September 14, 2022 at 9:33 pm
[url=https://tetracyclina.com/]cheap tetracycline online[/url]
ElwoodGon · September 14, 2022 at 10:24 pm
[url=https://trazodone.moscow/]discount desyrel[/url]
JaneCounk · September 15, 2022 at 12:38 am
[url=http://bestcialismedicationforsaleonline.monster/]how to buy cialis online[/url]
Charlesaduse · September 15, 2022 at 2:32 am
[url=http://prozac.business/]fluoxetine 648[/url]
ElwoodGon · September 15, 2022 at 11:32 am
[url=https://valtrextab.online/]cheap valtrex generic[/url]
Charlesaduse · September 15, 2022 at 1:41 pm
[url=http://bupropion.life/]cost of wellbutrin generic[/url]
Samuelraisk · September 15, 2022 at 3:36 pm
[url=http://antabuse.sbs/]antabuse over the counter south africa[/url]
RodneyTab · September 15, 2022 at 4:27 pm
[url=https://ordersynthroid.online/]buy synthroid 137 mcg[/url]
TeoCounk · September 16, 2022 at 2:09 am
[url=https://genericviagra200mgbestprice.quest/]best viagra for sale[/url]
Samuelraisk · September 16, 2022 at 2:50 am
[url=http://trazodone.moscow/]trazodone online[/url]
UgoCounk · September 16, 2022 at 4:47 am
[url=http://hydroxychloroquine.run/]plaquenil medication[/url]
JasonCounk · September 16, 2022 at 7:49 am
[url=http://orderazithromycin.online/]azithromycin cream over the counter[/url]
DavisMug · September 16, 2022 at 11:31 am
[url=https://lexapro.life/]lexapro price canada[/url]
MiaCounk · September 16, 2022 at 1:32 pm
[url=http://doxycycline.moscow/]doxycycline 200 mg capsules[/url]
MichaelDwego · September 16, 2022 at 2:01 pm
[url=https://celexa.agency/]celexa buy online uk[/url]
DarrylSef · September 16, 2022 at 8:39 pm
[url=https://phenergan.agency/]phenergan over the counter usa[/url] [url=https://clomid.sale/]clomid without prescription uk[/url] [url=https://cephalexin.company/]keflex discount[/url] [url=https://genericcialis40withnorx.quest/]buy cialis over the counter canada[/url] [url=https://prednisone.win/]prednisone 20mg tab cost[/url] [url=https://celexa.agency/]40 mg citalopram[/url]
JudyCounk · September 17, 2022 at 7:41 am
[url=http://orderviagratabletswithoutrx.monster/]women viagra online no prescription[/url]
Curtisvibia · September 17, 2022 at 8:18 am
[url=https://onlinedrugstore.company/]indian trail pharmacy[/url]
ElwoodGon · September 17, 2022 at 2:09 pm
[url=https://modafinilztab.com/]buy modafinil 200[/url]
RodneyTab · September 17, 2022 at 4:07 pm
[url=https://synthroid.life/]synthroid brand coupon[/url]
TimothyThive · September 17, 2022 at 5:13 pm
[url=http://prozac.business/]prozac cost uk[/url]
EvaCounk · September 17, 2022 at 6:12 pm
[url=https://adoxycycline.com/]doxycycline 75 mg price[/url]
MichaelDwego · September 17, 2022 at 6:20 pm
[url=https://modafinil.tech/]cheapest modafinil australia[/url]
Michaeldrist · September 17, 2022 at 6:46 pm
[url=https://ordersynthroid.online/]how to get synthroid[/url]
SamCounk · September 17, 2022 at 7:39 pm
[url=https://apropecia.com/]propecia[/url] [url=https://cheapviagradrugrx.quest/]brand name viagra[/url] [url=https://modafinil.monster/]modafinil online australia[/url]
AmyCounk · September 17, 2022 at 7:57 pm
[url=http://orderviagratabletswithoutrx.monster/]best sildenafil in india[/url]
MiclTek · September 17, 2022 at 11:30 pm
[url=https://malegra.cfd/]malegra fxt without prescription[/url]
ZakCounk · September 18, 2022 at 3:44 am
[url=https://clomid.ink/]online pharmacy clomid uk[/url] [url=https://viagraxtab.monster/]where to buy viagra uk[/url] [url=https://tretinoin.agency/]buy retin a online without a prescription[/url]
RodneyTab · September 18, 2022 at 2:56 pm
[url=https://phenergan.email/]phenergan cream australia[/url]
MarvinZem · September 18, 2022 at 7:50 pm
[url=http://allopurinola.online/]allopurinol 600 mg price[/url]
Estebanguall · September 18, 2022 at 10:49 pm
[url=http://biaxin.cfd/]biaxin clarithromycin[/url]
EvaCounk · September 18, 2022 at 11:01 pm
[url=https://orderviagratabletswithoutrx.monster/]canadian viagra 100mg[/url]
ElwoodGon · September 19, 2022 at 1:08 am
[url=https://tizanidine.email/]zanaflex 4[/url]
AnnaCounk · September 19, 2022 at 3:22 pm
[url=https://hydroxychloroquine.run/]hydroxychloroquine medication[/url]
JasonCounk · September 19, 2022 at 6:43 pm
[url=http://fildena.email/]fildena 100 mg for sale[/url]
AshCounk · September 19, 2022 at 7:31 pm
[url=https://apropecia.com/]propecia hair loss[/url] [url=https://viagraxtab.monster/]buy cheap viagra online australia[/url] [url=https://onlineviagraforsaleonline.monster/]real viagra online no prescription[/url] [url=https://cheapcialispillonline.monster/]buy cialis online europe[/url]
TommyHepsy · September 19, 2022 at 8:08 pm
[url=http://synthroida.com/]synthroid 0.75 mcg[/url]
KiaCounk · September 20, 2022 at 1:18 am
[url=http://bestviagra100pill.monster/]how to buy cheap viagra online[/url]
Estebanguall · September 20, 2022 at 1:21 am
[url=http://onlinecialismedicationwithoutprescription.monster/]buy cialis on line without prescription[/url]
MiaCounk · September 20, 2022 at 1:26 am
[url=http://orderviagratabletswithoutrx.monster/]sildenafil pills for sale[/url]
JimCounk · September 20, 2022 at 1:51 am
[url=https://hydroxychloroquine.run/]plaquenil coupon[/url]
CarlCounk · September 20, 2022 at 2:38 am
[url=http://apropecia.com/]propecia proscar[/url]
DavisMug · September 20, 2022 at 4:00 pm
[url=http://viagraonlinetabletonlinepharmacy.quest/]viagra buying canada[/url]
MichaelGuabe · September 20, 2022 at 9:31 pm
[url=https://orderamoxicillin.online/]buy amoxicillin online australia[/url]
JosephMaict · September 20, 2022 at 9:57 pm
[url=https://cheapviagratabsrx.quest/]female viagra pills online india[/url] [url=https://tetracycline.run/]tetracycline antibiotics[/url] [url=https://propecia.tech/]finasteride coupon[/url] [url=https://onlinepharmacy.wiki/]prices pharmacy[/url] [url=https://bestviagrabuyonline.quest/]can you buy generic viagra over the counter[/url]
MiclTek · September 21, 2022 at 5:07 am
[url=http://ordertrazodone.online/]trazodone 100 mcg[/url]
RobertFoold · September 21, 2022 at 9:24 am
[url=https://vardenafil.business/]vardenafil 10mg tablets[/url]
RichardFaply · September 21, 2022 at 10:33 am
[url=http://cialispillforsale.monster/]buy cialis without prescription[/url] [url=http://azithromycin.tech/]azithromycin capsules 500mg[/url] [url=http://finasterida.online/]propecia.com[/url]
LisaCounk · September 21, 2022 at 12:51 pm
[url=http://azithromycin.pics/]azithromycin 50 mg[/url]
UgoCounk · September 21, 2022 at 1:54 pm
[url=http://anafranil.today/]anafranil medicine[/url]
DavisMug · September 21, 2022 at 9:41 pm
[url=http://cheapcialis10mgtab.quest/]rx cialis coupon[/url]
ElwoodGon · September 22, 2022 at 11:11 am
[url=http://clomid.makeup/]clomid for sale in south africa[/url]
JackCounk · September 22, 2022 at 6:40 pm
[url=https://azithromycin.pics/]azithromycin for sale online canada[/url]
MarkCounk · September 23, 2022 at 1:43 am
[url=http://onlinepharmacy.network/]top 10 pharmacy websites[/url]
ElwoodGon · September 23, 2022 at 3:56 am
[url=http://tetracycline.run/]tetracycline 500 mg capsule price[/url]
DavisMug · September 23, 2022 at 4:02 am
[url=http://viagraonlinemedicationdrugstore.monster/]viagra pills for sale[/url]
LisaCounk · September 23, 2022 at 9:45 am
[url=http://baclofen.sbs/]baclofen tab 10mg[/url]
Davidhup · September 23, 2022 at 10:31 am
[url=https://furosemide.agency/]lasix tablet[/url]
RodneyTab · September 23, 2022 at 3:50 pm
[url=http://anafranil.cfd/]anafranil 10 mg[/url]
AlanCounk · September 23, 2022 at 10:12 pm
[url=http://tadalafil.sbs/]cost of prescription cialis[/url] [url=http://buyingcheapviagrapillsonline.quest/]where to get viagra without prescription[/url] [url=http://xenical.monster/]orlistat 120 mg generic on line[/url] [url=http://tretinoin.best/]tretinoin 01 coupon[/url]
BooCounk · September 24, 2022 at 1:11 am
[url=https://buyaccutane.shop/]accutane online australia[/url]
SueCounk · September 24, 2022 at 3:39 am
[url=https://cheapcialis5cost.quest/]cialis 5mg daily price[/url]
DavisMug · September 24, 2022 at 4:18 pm
[url=http://clomid.makeup/]clomid cost in india[/url]
Michaeldrist · September 24, 2022 at 7:53 pm
[url=http://bestviagra100mglowcost.quest/]cheapest price for sildenafil 20 mg[/url]
ElwoodGon · September 25, 2022 at 4:34 am
[url=http://genericviagratabwithnoprescription.quest/]discount viagra pharmacy[/url]
AshCounk · September 25, 2022 at 5:06 am
[url=https://paroxetine.boutique/]paroxetine 10mg price[/url] [url=https://doxycycline.sbs/]doxycycline 50[/url] [url=https://duloxetine.fun/]cost of generic cymbalta 60 mg[/url] [url=https://cipro.digital/]buy ciprofloxacin tablets[/url]
SueCounk · September 25, 2022 at 7:41 am
[url=https://buycialis5tablet.quest/]generic tadalafil 20mg india[/url]
MarvinZem · September 25, 2022 at 8:30 am
[url=https://cialistablets.monster/]cialis 20mg price[/url]
WilliamWem · September 25, 2022 at 7:14 pm
[url=https://genericviagratabwithnoprescription.quest/]otc viagra for women[/url] [url=https://colchicine.company/]probenecid colchicine tabs[/url] [url=https://vardenafil.autos/]med price levitra[/url]
Samuelraisk · September 25, 2022 at 8:40 pm
[url=http://vardenafil.autos/]levitra online canada[/url]
Estebanguall · September 26, 2022 at 2:43 am
[url=http://lisinopril.trade/]cheap lisinopril no prescription[/url]
RobertFoold · September 26, 2022 at 2:38 pm
[url=http://biaxintab.online/]biaxin xl[/url]
RicIsose · September 26, 2022 at 6:38 pm
[url=http://cheapcialis20mgpills.quest/]brand cialis australia[/url] [url=http://provigil.today/]provigil 200 mg cost[/url]
ElwoodGon · September 26, 2022 at 8:20 pm
[url=http://genericcialismedicinewithnoprescription.quest/]purchase cialis 10mg[/url]
Jameseloro · September 27, 2022 at 7:55 am
[url=https://buycialis10mgpills.quest/]cialis 5mg tablets australia[/url] [url=https://ordercialis5mg.monster/]cialis average cost[/url] [url=https://buycialis40mgtablets.quest/]online medication cialis[/url] [url=https://biaxintab.online/]biaxin 500 mg generic[/url] [url=https://genericviagra100mgwithoutrx.quest/]pharmacy viagra canada[/url] [url=https://fildena.sbs/]fildena 25 mg[/url]
Michaelemult · September 27, 2022 at 2:43 pm
[url=https://trazodone.business/]trazodone hydrochloride 100 mg[/url]
MichaelGuabe · September 27, 2022 at 4:34 pm
[url=https://fildena.sbs/]fildena 100 mg price[/url]
KiaCounk · September 27, 2022 at 8:07 pm
[url=http://viagraftabs.quest/]sildenafil 20 mg tablet brand name[/url]
ElwoodGon · September 27, 2022 at 9:58 pm
[url=http://buyviagratabletprescription.monster/]viagra in mexico over the counter[/url]
DarrylSef · September 27, 2022 at 10:18 pm
[url=http://viagratabsshop.monster/]can i buy viagra over the counter[/url] [url=http://propeciatab.online/]propecia generic brand[/url] [url=http://cheapcialistabletsorder.monster/]cialis purchase india[/url] [url=http://femaleviagra.life/]where to buy sildenafil 100mg[/url] [url=http://genericcialismedicinewithnoprescription.quest/]discount cialis 40 mg[/url] [url=http://buyviagra150mg.monster/]discount viagra pills[/url] [url=http://cialisonlinepillpharmacy.monster/]lowest price tadalafil[/url] [url=http://biaxintab.online/]buy biaxin cheap[/url]
Michaelemult · September 28, 2022 at 3:29 am
[url=https://buycialis40mgtablets.quest/]where to get cialis online[/url]
JaneCounk · September 28, 2022 at 3:48 am
[url=https://orderprednisone.online/]deltasone cost[/url]
TimothyThive · September 28, 2022 at 8:25 am
[url=https://bestviagratabsbuyingonline.quest/]over the counter viagra pills[/url]
EvaCounk · September 28, 2022 at 10:10 am
[url=https://ivermectin.pics/]buy liquid ivermectin[/url]
WimCounk · September 28, 2022 at 7:48 pm
[url=http://benicar.site/]benicar 40 25 mg[/url]
RichardFaply · September 29, 2022 at 4:49 am
[url=https://bestviagratabsbuyingonline.quest/]buy 10 viagra pills[/url] [url=https://modafinil.ink/]provigil pill[/url] [url=https://fildena.sbs/]fildena 25 mg[/url] [url=https://propeciatab.online/]propecia uk[/url]
WilliamWem · September 29, 2022 at 6:25 am
[url=http://buyviagratabletprescription.monster/]viagra 150 tablet[/url] [url=http://metformin.media/]metformin price canada[/url]
JoeCounk · September 29, 2022 at 6:29 am
[url=http://proscar.cfd/]propecia order[/url] [url=http://diclofenac.business/]price of voltaren gel in canada[/url] [url=http://erectafil.xyz/]erectafil 40 mg[/url] [url=http://genericcialisbuyonline.quest/]cialis 100mg for sale[/url] [url=http://furosemide.email/]furosemide 20 mg[/url]
JoeCounk · September 29, 2022 at 7:05 pm
[url=http://amoxicillin.download/]order amoxicillin 500mg[/url] [url=http://genericcialis20lowcost.quest/]cialis tablet price in india[/url] [url=http://viagragenericdrugonlinedrugstore.quest/]viagra pills 100 mg[/url] [url=http://abilify.cfd/]abilify brand name cost[/url] [url=http://amoxicillin.sbs/]augmentin 375mg tablets[/url] [url=http://zoloft.media/]zoloft for sale canada[/url]
Michaeldrist · September 29, 2022 at 7:54 pm
[url=http://propeciatab.online/]online propecia[/url]
SamCounk · September 30, 2022 at 2:11 am
[url=https://buycialis40mgtablets.monster/]generic daily use cialis[/url] [url=https://cheapcialis20mgwithoutprescription.quest/]cialis price mexico[/url] [url=https://abilify.cfd/]how much is abilify 5mg[/url] [url=https://colchicine.live/]buy colchicine 0.6mg[/url] [url=https://lasix.media/]lasix with no prescription[/url] [url=https://buyviagra100withoutrx.monster/]buy sildenafil 20 mg tablets[/url]
Davidhup · September 30, 2022 at 11:07 am
[url=http://viagramtab.monster/]viagra nz[/url]
DenCounk · September 30, 2022 at 11:57 am
[url=http://ivermectin.pics/]buy liquid ivermectin[/url]
MiclTek · September 30, 2022 at 1:12 pm
[url=http://lasix.tattoo/]lasix 500 mg tablet price[/url]
RobertFoold · September 30, 2022 at 2:31 pm
[url=http://cialistabwithnorx.monster/]discount tadalafil 20mg[/url]
UgoCounk · September 30, 2022 at 7:58 pm
[url=http://retina.boutique/]retin a tretinoin cream[/url]
ElwoodGon · September 30, 2022 at 11:19 pm
[url=http://viagraonlinetabsonlinepharmacy.monster/]sildenafil generic price uk[/url]
MiaCounk · October 1, 2022 at 12:54 am
[url=https://orderprednisone.online/]average cost of prednisone[/url]
EyeCounk · October 1, 2022 at 8:05 am
[url=http://onlinedrugstore.email/]mexican pharmacy online[/url] [url=http://genericcialis20online.quest/]tadalafil price comparison[/url]
ElwoodGon · October 1, 2022 at 11:42 am
[url=http://viagragenericpillsforsaleonline.quest/]where to buy generic viagra online in canada[/url]
JimCounk · October 1, 2022 at 4:06 pm
[url=http://viagraftabs.quest/]viagra viagra[/url]
TommyHepsy · October 1, 2022 at 8:11 pm
[url=http://clomid.run/]clomid in mexico[/url]
TedCounk · October 2, 2022 at 9:36 pm
[url=http://familystorerx.click/]canadianpharmacyworld[/url]
DavisMug · October 3, 2022 at 1:27 am
[url=http://onlineviagra150mgpills.quest/]purchase viagra usa[/url]
KimCounk · October 3, 2022 at 1:32 am
[url=https://accutane.ink/]accutane india cost[/url]
Samuelraisk · October 3, 2022 at 3:40 am
[url=https://pharmacyonline.email/]cross border pharmacy canada[/url]
PaulCounk · October 3, 2022 at 6:06 am
[url=http://albenza.cfd/]buy canada albendazole[/url]
Edgarlor · October 3, 2022 at 12:09 pm
[url=http://modafinil.wtf/]modafinil 200mg tablets[/url]
ZakCounk · October 3, 2022 at 12:41 pm
[url=https://familystorerx.click/]indian pharmacies safe[/url] [url=https://happyfamilystore.click/]trust pharmacy[/url] [url=https://skypharmacy.click/]best online foreign pharmacies[/url] [url=https://happyfamilypharmacy.click/]internet pharmacy manitoba[/url]
PaulCounk · October 3, 2022 at 5:21 pm
[url=http://bestviagraprescription.monster/]where can i buy over the counter generic viagra[/url]
MarkCounk · October 3, 2022 at 6:16 pm
[url=http://genericcialisrx.quest/]cheap cialis[/url]
EyeCounk · October 3, 2022 at 6:37 pm
[url=https://buyviagra150noprescription.monster/]female viagra drug canada[/url] [url=https://accutane.ink/]accutane canada 40mg[/url] [url=https://bestcialis40mgprice.monster/]generic cialis drugstore[/url] [url=https://gabapentin.run/]neurontin prescription medication[/url] [url=https://buyviagra200withoutprescription.monster/]viagra online purchase usa[/url] [url=https://baclofen.boutique/]baclofen 30 mg tab[/url] [url=https://genericcialisrx.quest/]cheapest cialis[/url] [url=https://orderzoloft.online/]zoloft pill generic[/url]
MarvinZem · October 4, 2022 at 2:01 am
[url=http://ordercialis5withnoprescription.monster/]cost of 5mg cialis[/url]
Curtisvibia · October 4, 2022 at 10:13 am
[url=https://zoloft.lol/]zoloft us[/url]
Charlesaduse · October 4, 2022 at 4:34 pm
[url=https://lasix.moscow/]lasix 20mg[/url]
JosephMaict · October 4, 2022 at 5:38 pm
[url=https://buyviagra150mgwithnoprescription.quest/]viagra pharmacy australia[/url] [url=https://ivermectintab.online/]ivermectin 3 mg dose[/url] [url=https://ordercialismedicinewithnoprescription.monster/]cheapest tadalafil online uk[/url] [url=https://flagyltab.online/]buy flagyl online[/url] [url=https://prednisone.beauty/]buy prednisone online from canada[/url] [url=https://accutane.xyz/]accutane cost in mexico[/url] [url=https://tadalafil.beauty/]how to buy generic cialis online[/url]
Jameseloro · October 4, 2022 at 7:42 pm
[url=https://gabapentina.online/]gabapentin cap 400 mg[/url] [url=https://onlineviagra150mgpills.quest/]canadian drugstore viagra online[/url] [url=https://buyingcheapcialisonline.quest/]generic tadalafil coupon[/url] [url=https://albenza.sbs/]albendazole price in usa[/url] [url=https://viagratabswithoutrx.monster/]sildenafil tablets 5mg[/url]
UgoCounk · October 4, 2022 at 9:39 pm
[url=http://lexapro.digital/]lexapro 25mg[/url]
AmyCounk · October 5, 2022 at 1:43 am
[url=http://bestviagra50tablet.monster/]viagra 30 tablet[/url]
JudyCounk · October 5, 2022 at 8:02 am
[url=http://doxycycline.ink/]doxycycline online singapore[/url]
EastonJeds · October 5, 2022 at 3:34 pm
clindamycin tablets clindamycin 300 mg priceclindamycin pills clindamycin uk
MichaelGuabe · October 5, 2022 at 3:39 pm
[url=https://cephalexina.online/]keflex tablets[/url]
RichardFaply · October 5, 2022 at 5:52 pm
[url=http://bestviagratabletrx.monster/]sildenafil online no prescription[/url] [url=http://bestcialistabsorder.quest/]cialis price[/url] [url=http://sildenafil.team/]viagra over the counter canada[/url] [url=http://pharmacyonline.email/]online pharmacy reddit[/url] [url=http://xenical.sbs/]can you buy orlistat over the counter in australia[/url]
ElwoodGon · October 5, 2022 at 7:42 pm
[url=http://pharmacyonline.email/]canadian prescription pharmacy[/url]
MiclTek · October 5, 2022 at 8:47 pm
[url=http://pharmacyonline.email/]rate canadian pharmacies[/url]
Charlesaduse · October 6, 2022 at 12:00 am
[url=https://ordercialismedicinewithnoprescription.monster/]5mg cialis[/url]
NickCounk · October 6, 2022 at 1:01 am
[url=http://augmentina.online/]amoxil antibiotics[/url]
DarrylSef · October 6, 2022 at 9:03 am
[url=http://sildenafil.team/]viagra online india price[/url] [url=http://cephalexina.online/]cephalexin from canada[/url] [url=http://viagrawpill.online/]where to buy sildenafil in canada[/url] [url=http://cialismedicinenorx.quest/]cialis mexico cost[/url] [url=http://tadalafil.beauty/]tadalafil cost[/url]
MiaCounk · October 6, 2022 at 9:18 am
[url=https://lisinopril.download/]lisinopril 20mg[/url]
Davidhup · October 6, 2022 at 1:28 pm
[url=http://gabapentin.company/]buy neurontin online no prescription[/url]
SueCounk · October 6, 2022 at 10:23 pm
[url=https://lisinopril.download/]lisinopril 49 mg[/url]
IsmaelVell · October 7, 2022 at 1:32 am
Credit 10000 euros
MichaelDwego · October 7, 2022 at 3:13 am
[url=https://viagratab.online/]chewable sildenafil[/url]
LisaCounk · October 7, 2022 at 4:06 am
[url=http://genericcialis20withnorx.monster/]cost of cialis 5mg in canada[/url]
leflunomide24 lor · October 7, 2022 at 6:40 am
lasix online lasix 100 mg without prescription lasix 40 mg pills
CarlCounk · October 7, 2022 at 9:15 am
[url=http://allopurinol.fun/]allopurinol 30 mg[/url]
Edgarlor · October 7, 2022 at 11:04 pm
[url=http://viagratab.online/]female viagra over the counter[/url]
RicIsose · October 8, 2022 at 8:14 am
[url=http://modafinil.tattoo/]buy modafinil online cheap[/url] [url=http://buyviagra150mgwithnoprescription.quest/]buy viagra online fast shipping[/url]
DevinMorp · October 8, 2022 at 12:46 pm
Sinziger Taxi
TimothyThive · October 8, 2022 at 4:20 pm
[url=https://fluoxetine.run/]price of prozac[/url]
TommyHepsy · October 8, 2022 at 5:32 pm
[url=http://acyclovir.life/]zovirax 50 mg cream[/url]
ZakCounk · October 8, 2022 at 11:25 pm
[url=https://metformintabs.online/]buy metformin online usa[/url] [url=https://drugstor.monster/]online pharmacy australia paypal[/url]
LisaCounk · October 9, 2022 at 2:10 am
[url=http://buyneurontin.monster/]neurontin 3[/url]
Ceftin lor · October 9, 2022 at 4:41 am
donepezil without prescription cheap donepezil 5mgdonepezil without prescription donepezil over the counter
Thomassidge · October 9, 2022 at 5:10 am
Hello. And Bye.
KimCounk · October 9, 2022 at 7:51 am
[url=https://augmentin.works/]amoxicillin capsules for sale[/url]
AlanCounk · October 9, 2022 at 11:11 pm
[url=http://buyneurontin.monster/]gabapentin 400 mg coupon[/url] [url=http://albenza.run/]buy albenza online[/url] [url=http://sildalistab.online/]sildalis 120 mg[/url] [url=http://motilium.best/]motilium over the counter[/url] [url=http://chloroquine.site/]chloroquine cost per pill[/url] [url=http://chloroquine.store/]chloroquine sulphate 200mg[/url] [url=http://furosemide.life/]where to buy furosemide[/url]
MarcoGap · October 10, 2022 at 12:35 am
http://onlinesofortkredite.org/
Estebanguall · October 10, 2022 at 2:35 am
[url=https://buyampicillin.monster/]ampicillin 250 mg capsule[/url]
RodneyTab · October 10, 2022 at 3:34 am
[url=https://seroquel.life/]how to get seroquel[/url]
SamCounk · October 10, 2022 at 4:06 am
[url=https://avodart.store/]buy avodart online[/url] [url=https://cleocin.site/]where can i get clindamycin[/url]
Michaelemult · October 11, 2022 at 12:17 am
[url=https://baclofen.agency/]prescription baclofen 10 mg[/url]
AmyCounk · October 11, 2022 at 6:00 am
[url=http://fildena.icu/]fildena 100 mg price in india[/url]
JackCounk · October 11, 2022 at 7:59 am
[url=https://celecoxib.cfd/]celibrax[/url]
ElwoodGon · October 11, 2022 at 8:40 am
[url=http://tetracycline.business/]terramycin powder[/url]
BooCounk · October 11, 2022 at 1:02 pm
[url=https://metformin2022.com/]metformin without a prescriptions online[/url]
MaryCounk · October 11, 2022 at 6:30 pm
[url=http://nolvadex.run/]where to order nolvadex online[/url] [url=http://buycanadianpharmacy.life/]legit pharmacy websites[/url] [url=http://duloxetine.site/]best price for cymbalta 60 mg[/url] [url=http://erythromycin.site/]antibiotic erythromycin[/url] [url=http://gabapentin.life/]neurontin 200 mg[/url]
WimCounk · October 11, 2022 at 6:35 pm
[url=http://tadacip.digital/]tadacip 20 tablet[/url]
JaneCounk · October 11, 2022 at 6:59 pm
[url=http://buyanafranil.life/]anafranil purchase online[/url]
TimothyThive · October 11, 2022 at 10:52 pm
[url=https://prozac.sbs/]prozac 20 mg coupon[/url]
TheodoreKi · October 12, 2022 at 1:55 am
Autowasche Hemau
JosephMaict · October 12, 2022 at 2:59 am
[url=https://levaquin.xyz/]buy generic levaquin[/url] [url=https://biaxin.site/]biaxin uti[/url] [url=https://acyclovir.life/]acyclovir medication cream[/url] [url=https://cozaar.xyz/]cozaar 50 mg tab[/url]
NickCounk · October 12, 2022 at 6:45 am
[url=https://prozac.network/]prosac[/url]
RodneyTab · October 12, 2022 at 10:33 am
[url=https://zofran.email/]zofran medicine[/url]
Mestinon lor · October 12, 2022 at 11:36 am
buy diltiazem how to buy diltiazem where can i buy diltiazem 60mg
JoeCounk · October 12, 2022 at 1:15 pm
[url=https://cleocin.site/]generic cleocin[/url] [url=https://buyzofran.monster/]cheap zofran[/url]
Curtisvibia · October 12, 2022 at 4:36 pm
[url=http://celexa.company/]buy celexa online[/url]
EvaCounk · October 12, 2022 at 7:31 pm
[url=https://prozac.best/]fluoxetine 20 mg cap[/url]
SueCounk · October 12, 2022 at 8:16 pm
[url=http://bactrim.life/]buy bactrim online canada[/url]
ElwoodGon · October 13, 2022 at 7:01 pm
[url=http://suhagra.click/]suhagra 50 mg tablet price[/url]
AshCounk · October 14, 2022 at 1:44 am
[url=https://prednisone.network/]prednisone rx coupon[/url] [url=https://seroquel.digital/]seroquel 100 mg[/url]
DarrylSef · October 14, 2022 at 3:16 am
[url=http://lyrica.email/]lyrica 50 mg[/url] [url=http://buysildalis.life/]discount sildalis[/url] [url=http://tetracycline.business/]buy sumycin[/url] [url=http://fluconazole.life/]diflucan drug[/url] [url=http://erythromycin.xyz/]buy erythromycin usa[/url] [url=http://buydexamethasone.monster/]dexamethasone 1.5 mg[/url] [url=http://cafergot.company/]cafergot online australia[/url]
Estebanguall · October 14, 2022 at 3:20 am
[url=https://effexor.xyz/]effexor 150 mg coupon[/url]
YonCounk · October 14, 2022 at 5:30 am
[url=https://drugstor.monster/]which pharmacy is cheaper[/url]
DenCounk · October 14, 2022 at 7:57 am
[url=https://fildena.agency/]buy fildena[/url]
Atorvastatin lor · October 14, 2022 at 9:24 am
thorazine 50 mg prices thorazine canada thorazine 50mg cheap
RobertFoold · October 14, 2022 at 2:27 pm
[url=https://tetracycline.sbs/]terramycin for dogs[/url]
JudyCounk · October 14, 2022 at 5:17 pm
[url=https://methocarbamol.live/]robaxin usa[/url]
MiclTek · October 15, 2022 at 4:47 am
[url=http://metformin.network/]metformin 500 mg no prescription[/url]
TeoCounk · October 15, 2022 at 9:26 am
[url=http://sildenafiltabs.online/]cheapest sildenafil india[/url]
RichardFaply · October 15, 2022 at 9:33 am
[url=http://neurontin.business/]gabapentin 600 mg[/url] [url=http://lasix.sbs/]furosemide 20 mg drug[/url] [url=http://metformin.network/]glucophage over the counter[/url] [url=http://singulair.fun/]singulair without prescription[/url] [url=http://erythromycin.agency/]erythromycin prescription[/url]
WimCounk · October 15, 2022 at 9:48 am
[url=http://tretinoin.boutique/]generic retin a micro[/url]
Jameseloro · October 15, 2022 at 4:14 pm
[url=https://baclofen.company/]baclofen 30 mg cream[/url] [url=https://lisinopril2022.online/]zestril 30 mg[/url] [url=https://indocintab.online/]indomethacin 25 mg[/url]
JaneCounk · October 15, 2022 at 6:18 pm
[url=http://aclomid.online/]clomid 100mg price[/url]
AnnaCounk · October 15, 2022 at 9:24 pm
[url=https://aclomid.online/]where to get clomid in south africa[/url]
Curtisvibia · October 16, 2022 at 7:07 am
[url=https://singulair.fun/]price of singulair 5mg[/url]
Charlesaduse · October 16, 2022 at 7:51 am
[url=http://buyflomax.life/]flomax blood pressure[/url]
SueCounk · October 16, 2022 at 8:48 am
[url=http://sumycin.life/]purchase tetracycline online[/url]
Samuelraisk · October 16, 2022 at 9:49 am
[url=https://diclofenac.icu/]diclofenac tab price in india[/url]
Michaelemult · October 16, 2022 at 10:36 am
[url=https://baclofen.company/]order baclofen online usa[/url]
SueCounk · October 16, 2022 at 11:49 am
[url=http://buybiaxin.monster/]biaxin ear infection[/url]
ApolloNuh · October 16, 2022 at 12:58 pm
Kraftfahrzeugmeisterbetrieb W. Haarlammert GmbH
ElwoodGon · October 16, 2022 at 10:01 pm
[url=http://erythromycin.agency/]erythromycin for sale[/url]
Jameseloro · October 16, 2022 at 10:42 pm
[url=https://fildena.run/]fildena 100 mg price[/url] [url=https://buyabilify.monster/]buy abilify 5mg online without prescription[/url] [url=https://lisinopril2022.online/]zestril price[/url] [url=https://erythromycin.agency/]erythromycin 500 mg tablet india[/url] [url=https://tadacip.today/]tadacip[/url]
Edgarlor · October 16, 2022 at 11:21 pm
[url=http://buyphenergan.monster/]phenergan buy[/url]
MichaelGuabe · October 16, 2022 at 11:26 pm
[url=http://fildena.run/]fildena 100mg[/url]
KiaCounk · October 17, 2022 at 12:07 am
[url=https://estracetab.online/]estrace price uk[/url]
Dapsone lor · October 17, 2022 at 3:03 am
sildenafil online sildenafil pharmacy sildenafil generic
Michaelemult · October 17, 2022 at 5:54 am
[url=https://erythromycin.agency/]erythromycin pills cost[/url]
Davidhup · October 17, 2022 at 2:08 pm
[url=https://neurontin.business/]neurontin canada[/url]
CarlCounk · October 17, 2022 at 2:49 pm
[url=https://tetracyclina.online/]tetracycline cream over the counter[/url]
DarrylSef · October 17, 2022 at 5:21 pm
[url=http://lopressor.fun/]lopressor no prescription[/url] [url=http://onlinedrugstore.sbs/]canada pharmacy online legit[/url] [url=http://robaxin.click/]robaxin 750 uk[/url] [url=http://buymetformin.life/]metformin 1000 mg pill[/url] [url=http://finpecia.live/]cheap finasteride australia[/url] [url=http://dexamethasone.email/]dexamethasone capsule[/url] [url=http://ventolin.business/]where can i buy albuterol[/url]
JasonCounk · October 17, 2022 at 9:44 pm
[url=https://escitalopram.xyz/]lexapro price singapore[/url]
TeoCounk · October 18, 2022 at 6:15 am
[url=http://canadianpharmaceuticalstores.quest/]austria pharmacy online[/url]
ZakCounk · October 18, 2022 at 7:40 pm
[url=https://bactrimds.online/]bactrim australia[/url] [url=https://canadianpharmaceuticalstores.quest/]rx pharmacy no prescription[/url] [url=https://vardenafilr.online/]generic vardenafil canada[/url] [url=https://viarga.online/]purplepill.com[/url] [url=https://acutane.online/]buy accutane 20mg[/url]
MiclTek · October 19, 2022 at 12:36 am
[url=http://baclofen.company/]baclofen 10 mg tablets[/url]
SpencerOret · October 19, 2022 at 2:11 am
prestito 4000 euro online
JoeCounk · October 19, 2022 at 2:57 am
[url=http://fluoxetine.business/]best price for prozac 10 mg tablet[/url] [url=http://lexapro.email/]lexapro brand coupon[/url] [url=http://buyprovigil.life/]provigil 400 mg[/url] [url=http://valtrex.wtf/]buy valtrex online no prescription[/url] [url=http://ivermectin.autos/]ivermectin 80 mg[/url] [url=http://aclomid.online/]clomid usa[/url] [url=http://ventolin.sale/]albuterol no rx[/url] [url=http://buyerythromycin.monster/]erythromycin prices[/url]
MarvinZem · October 19, 2022 at 9:23 am
[url=https://buyphenergan.monster/]50 mg phenergan[/url]
JackCounk · October 19, 2022 at 10:14 am
[url=http://colchicine.agency/]can you buy colchicine online[/url]
Arava lor · October 19, 2022 at 3:28 pm
irbesartan nz cheapest irbesartan 300mgirbesartan without prescription irbesartan united kingdom
BooCounk · October 20, 2022 at 2:19 am
[url=https://advair.boutique/]price compare advair[/url]
MaryCounk · October 20, 2022 at 8:33 am
[url=http://buyalbenza.life/]albenza mexico[/url] [url=http://cafergot.agency/]cafegot[/url] [url=http://aclomid.online/]where to order clomid[/url] [url=http://methocarbamol.cfd/]where to buy robaxin in us[/url] [url=http://azithromycin.site/]azithromycin where to buy without prescription[/url] [url=http://propranolol.company/]inderal 40 mg cost[/url] [url=http://prozac.works/]fluoxetine 10mg tablets uk[/url]
JasonCounk · October 20, 2022 at 1:18 pm
[url=https://flagyl.online/]generic flagyl cost[/url]
EyeCounk · October 20, 2022 at 6:42 pm
[url=https://finpeciatab.online/]propecia nz buy[/url] [url=https://clonidine.site/]where can i purchase clonidine[/url] [url=https://buykamagra.quest/]kamagra oral jelly price in mumbai[/url] [url=https://buyinderal.life/]generic inderal online[/url] [url=https://buynexium.life/]where to buy nexium 40 mg[/url] [url=https://buyphenergan.life/]50 mg phenergan[/url]
Edgarlor · October 21, 2022 at 1:59 am
[url=https://hydrochlorothiazide.life/]hydrochlorothiazide 12.5 mg[/url]
MiclTek · October 21, 2022 at 4:02 am
[url=https://buyivermectin.life/]ivermectin tablets order[/url]
JasonCounk · October 21, 2022 at 6:26 am
[url=https://modafinilx.online/]best modafinil[/url]
SueCounk · October 21, 2022 at 9:53 am
[url=https://prednisone.wiki/]prednisone 10mg[/url]
FinleyOret · October 21, 2022 at 2:41 pm
http://druckereien.com.de/zwiesel
KiaCounk · October 21, 2022 at 3:41 pm
[url=https://atenolol.site/]tenormin 25[/url]
UgoCounk · October 21, 2022 at 7:08 pm
[url=http://diflucan.sbs/]diflucan without prescription[/url]
Edgarlor · October 21, 2022 at 10:41 pm
[url=https://onlinedrugstore.icu/]reliable canadian pharmacy[/url]
Levofloxacin lor · October 22, 2022 at 6:36 am
dramamine australia dramamine pills how to purchase dramamine 50mg
ZakCounk · October 22, 2022 at 12:48 pm
[url=https://canadianpharmacy.monster/]canadian world pharmacy[/url] [url=https://happypharmacy.monster/]world pharmacy india[/url] [url=https://canadianfamilypharmacy.online/]the pharmacy[/url] [url=https://buyonlinepharmacy.life/]indian pharmacies safe[/url] [url=https://buyonlinedrugstore.monster/]pharmacy wholesalers canada[/url]
EvaCounk · October 22, 2022 at 5:10 pm
[url=http://dipyridamole.cfd/]dipyridamole medication[/url]
Davidhup · October 23, 2022 at 4:29 am
[url=https://robaxin.fun/]robaxin 500mg otc[/url]
AshCounk · October 23, 2022 at 3:38 pm
[url=https://strattera.digital/]purchase stattera[/url] [url=https://advair.site/]buy advair[/url] [url=https://suhagra24.com/]suhagra 100 online purchase[/url] [url=https://cephalexin.digital/]keflex 500 mg price[/url] [url=https://avodart.email/]avodart 0.5 mg capsule[/url] [url=https://vardenafiltabs.com/]vardenafil order[/url] [url=https://ventolin.guru/]can i buy albuterol otc[/url] [url=https://hydroxychloroquine.makeup/]plaquenil for lupus[/url]
MalcolmOret · October 23, 2022 at 5:14 pm
Lainaa 1000 euroa
YonCounk · October 23, 2022 at 10:23 pm
[url=https://pharm.monster/]canada drugstore pharmacy rx[/url]
Crestor lor · October 24, 2022 at 2:18 am
catapres 100 mcg united states catapres 100 mcg without a prescription catapres australia
Flomax lor · October 26, 2022 at 1:02 pm
cheapest flomax cheap flomax flomax 0,2 mg usa
Troymn · October 28, 2022 at 12:12 am
lan 200000 kr
Arava lor · October 28, 2022 at 10:44 am
retin-a cream online retin-a cream united kingdom where can i buy retin-a cream 0.025%
Remeron lor · October 30, 2022 at 1:22 pm
mestinon generic mestinon 60mg uk mestinon tablet
AshtonBiaf · October 30, 2022 at 1:47 pm
Flohmarkt Lauchhammer
Actos lor · November 1, 2022 at 8:30 am
cost of zocor how to purchase zocor 10mg zocor 40mg without prescription
SullivanGymn · November 1, 2022 at 1:58 pm
lana 40000 kronor
Ashwagandha lor · November 3, 2022 at 7:01 am
cheapest lasix 40 mg buy lasix 100 mg lasix cost
AxelTring · November 6, 2022 at 1:28 am
lan pa 5000 kr
Cristiandug · November 8, 2022 at 6:52 pm
Friseur Singhof
periactin 4 mg united states · November 8, 2022 at 10:02 pm
ceclor without prescription ceclor online ceclor medication
Ericinwark · November 10, 2022 at 1:03 am
lan 150000 kroner
strattera 10mg purchase · November 10, 2022 at 7:46 pm
spironolactone without a prescription spironolactone price cheapest spironolactone
Jaxveima · November 11, 2022 at 10:36 am
Glaserei Bernd Hoffmann GmbH
buy zocor · November 12, 2022 at 1:10 pm
clozaril tablets [url=https://clozarill.com/#]clozaril 50 mg otc[/url] clozaril online
JaneCounk · November 13, 2022 at 2:05 pm
[url=http://bactrimds.shop/]bactrim gel[/url]
Curtisvibia · November 13, 2022 at 2:29 pm
[url=http://ventolintab.com/]buy albuterol india[/url]
MichaelGuabe · November 13, 2022 at 3:48 pm
[url=https://neurontinv.online/]neurontin 300[/url]
Kennethveima · November 13, 2022 at 5:48 pm
lana 5000
TeoCounk · November 13, 2022 at 9:10 pm
[url=http://tadalafila.org/]tadalafil 20mg pills[/url]
JimCounk · November 14, 2022 at 3:28 am
[url=http://fluoxetine.click/]cost of prozac nz[/url]
EyeCounk · November 14, 2022 at 3:45 am
[url=https://lasixm.monster/]furosemide price comparison[/url] [url=https://albuterola.org/]ventolin nebules[/url] [url=https://fluoxetine.click/]fluoxetine online uk[/url] [url=https://cleocintabs.online/]clindamycin 300 mg prescription[/url] [url=https://prednisolone.icu/]prednisolone over the counter usa[/url] [url=https://modafinilz.online/]can i buy modafinil over the counter[/url] [url=https://buykamagra.monster/]kamagra oral jelly suppliers[/url] [url=https://propecial.monster/]propecia in australia[/url]
JosephMaict · November 14, 2022 at 11:16 am
[url=https://zoloftx.org/]zoloft tabs[/url] [url=https://anafraniltabs.monster/]anafranil[/url]
MichaelDwego · November 14, 2022 at 11:46 am
[url=http://allopurinolz.quest/]allopurinol otc[/url]
Michaeldrist · November 14, 2022 at 1:28 pm
[url=http://phenergan.icu/]phenergan otc nz[/url]
cost of metoprolol · November 14, 2022 at 3:18 pm
hyzaar without prescription [url=http://hyzaars.com/#]how to buy hyzaar 12,5mg[/url] hyzaar for sale
TimothyThive · November 14, 2022 at 3:37 pm
[url=https://lisinopril.fun/]lisinopril 20 mg price in india[/url]
MiaCounk · November 14, 2022 at 9:39 pm
[url=http://lisinoprilb.online/]buy lisinopril 10 mg[/url]
Estebanguall · November 15, 2022 at 12:02 am
[url=http://phenergan.icu/]phenergan prescription[/url]
JackCounk · November 15, 2022 at 12:45 am
[url=http://buykamagra.monster/]kamagra sildenafil citrate oral jelly[/url]
RodneyTab · November 15, 2022 at 3:01 am
[url=https://sildenafilx.shop/]generic viagra australia[/url]
PaulCounk · November 15, 2022 at 4:31 am
[url=https://colchicine.run/]colchicine online sale[/url]
WilliamWem · November 15, 2022 at 7:14 am
[url=http://phenergan.icu/]pharmacy phenergan comparison[/url] [url=http://retinatabs.com/]tretinoin cream price comparison[/url] [url=http://buymalegra.monster/]malegra 50 mg[/url] [url=http://buylasix.life/]lasix best price[/url] [url=http://finpecia.click/]can you buy propecia over the counter in canada[/url]
MarvinZem · November 15, 2022 at 7:37 am
[url=https://cheapviagrapharm.com/]viagra pill[/url]
Jameseloro · November 15, 2022 at 9:01 am
[url=http://finpecia.click/]cost of propecia in india[/url] [url=http://clomidtab.net/]can you buy clomid over the counter in usa[/url] [url=http://metformin.sbs/]metformin 104 pill[/url] [url=http://buylasix.life/]cost of furosemide 40 mg[/url] [url=http://cheapviagrapharm.com/]generic viagra[/url] [url=http://lioresaltabs.quest/]baclofen for sale[/url]
RichardFaply · November 15, 2022 at 12:20 pm
[url=https://antibioticsotc.com/]cheap omnicef[/url] [url=https://allopurinolz.quest/]allopurinol 100mg price[/url] [url=https://buylasix.life/]can you buy lasix in mexico without a prescription[/url] [url=https://retinatabs.com/]where can you buy tretinoin gel[/url] [url=https://buyacyclovir.life/]cost of acyclovir 200 mg[/url] [url=https://seroqueltabs.shop/]seroquel 200mg[/url]
JoeCounk · November 15, 2022 at 12:43 pm
[url=http://accutane.fun/]buy acutane[/url] [url=http://lisinoprilb.online/]lisinopril 3[/url] [url=http://colchicine.run/]price colchicine 0.6 mg[/url] [url=http://buycanadianpharmacy.monster/]canadian pharmacy sildenafil[/url]
Davidhup · November 15, 2022 at 12:59 pm
[url=https://buypropeciawithoutprescription.com/]prescription propecia 1mg[/url]
ZakCounk · November 15, 2022 at 1:09 pm
[url=https://iveromectina.net/]ivermectin lotion for lice[/url]
CarlCounk · November 15, 2022 at 11:06 pm
[url=https://cipro.life/]cipro cost in mexico[/url]
JoeCounk · November 16, 2022 at 5:10 am
[url=http://buystrattera.monster/]strattera cost generic[/url] [url=http://tretinointabs.com/]retin a cream online india[/url] [url=http://buycolchicine.life/]colchicine price in mexico[/url] [url=http://provigiltab.online/]generic provigil prices[/url] [url=http://lisinoprilds.com/]zestril pill[/url] [url=http://augmentin.run/]augmentin capsules 875 mg[/url]
TedCounk · November 16, 2022 at 8:51 am
[url=http://lasixfurosemide.net/]furosemide pill[/url]
Michaelemult · November 16, 2022 at 4:57 pm
[url=http://dapoxetineavana.online/]dapoxetine generic cheap[/url]
WimCounk · November 16, 2022 at 4:59 pm
[url=http://propranolol.agency/]propranolol 7.5 g[/url]
MaryCounk · November 16, 2022 at 4:59 pm
[url=https://lexaprotab.monster/]lexapro 2017[/url] [url=https://lisinoprilb.online/]lisinopril tablet[/url] [url=https://tretinointabs.com/]retin-a 1.0 with out a prescription[/url] [url=https://buykamagra.monster/]kamagra oral jelly sildenafil[/url] [url=https://augmentintab.online/]buy amoxicillin 875[/url] [url=https://colchicine.run/]colchicine 500 mcg tabs[/url]
DarrylSef · November 16, 2022 at 5:53 pm
[url=http://amoxicillinmed.online/]50 mg amoxicillin[/url] [url=http://colchicine.sbs/]colchicine 0.5 mg price[/url] [url=http://ventolintabs.shop/]can you buy ventolin over the counter in uk[/url] [url=http://nolvadextamoxifen.shop/]buy nolvadex online canada[/url] [url=http://buyacyclovir.life/]where can i buy zovirax online[/url]
Curtisvibia · November 16, 2022 at 7:00 pm
[url=http://etrazodone.com/]trazodone 100mg australia[/url]
Estebanguall · November 16, 2022 at 9:53 pm
[url=http://amoxicillingen.com/]100 amoxicillin 500 mg[/url]
Edgarlor · November 17, 2022 at 12:10 am
[url=https://dapoxetineavana.online/]buy dapoxetine 60 mg in india[/url]
JasonCounk · November 17, 2022 at 6:53 am
[url=https://fluoxetine.click/]fluoxetine 10 mg tablet coupon[/url]
Michaelemult · November 17, 2022 at 7:35 am
[url=http://neurontinv.online/]cost of gabapentin 600 mg[/url]
RodneyTab · November 17, 2022 at 10:16 am
[url=https://finpecia.click/]generic propecia from canada[/url]
CarlCounk · November 17, 2022 at 1:07 pm
[url=https://tretinoin.icu/]online tretinoin cream[/url]
DavisMug · November 17, 2022 at 1:50 pm
[url=https://zoloftx.org/]zoloft over the counter[/url]
PaulCounk · November 17, 2022 at 3:03 pm
[url=https://provigiltab.online/]buy provigil 200mg[/url]
AlanCounk · November 17, 2022 at 8:44 pm
[url=https://lisinoprilds.com/]30mg lisinopril[/url] [url=https://furosemidetab.online/]lasix loop diuretic[/url] [url=https://prozactab.com/]fluoxetine 10mg tablets cost[/url] [url=https://cipros.shop/]cipro 750 mg tablet[/url] [url=https://albuterola.org/]ventolin hfa price[/url]
ElwoodGon · November 17, 2022 at 10:50 pm
[url=http://ntviagra.com/]viagra pill cost usa[/url]
Estebanguall · November 18, 2022 at 12:49 am
[url=http://lisinoprilprinivil.shop/]lisinopril 125 mg[/url]
RobertFoold · November 18, 2022 at 1:58 am
[url=http://synthroidv.com/]synthroid 150 mcg cost[/url]
Gregoryveima · November 18, 2022 at 4:28 am
Gymnasium Bad Friedrichshall
ZakCounk · November 18, 2022 at 4:34 am
[url=https://lisinoprilx.org/]zestril 30 mg[/url]
PaulCounk · November 18, 2022 at 5:21 am
[url=https://tretinoin.icu/]retin a buy online[/url]
TeoCounk · November 18, 2022 at 6:36 am
[url=https://modafinil24.net/]real modafinil[/url]
IvyCounk · November 18, 2022 at 7:49 am
[url=http://flagyl.cfd/]flagyl tablets over the counter[/url] [url=http://propecial.monster/]generic propecia safe[/url] [url=http://acyclovirztab.online/]zovirax cost nz[/url] [url=http://tretinoinretina.shop/]where can i buy tretinoin[/url] [url=http://azithromycingn.online/]azithromycin for sale canada[/url] [url=http://amoxicillina.org/]augmentin 750 mg tablet[/url] [url=http://buytadalafil20mg.com/]buy real cialis[/url] [url=http://prozactab.com/]how to get prozac online[/url]
MiaCounk · November 18, 2022 at 10:45 am
[url=http://gabapentintabs.shop/]neurontin prescription coupon[/url]
ElwoodGon · November 18, 2022 at 12:26 pm
[url=http://etrazodone.com/]trazodone 300 mg cost[/url]
AmyCounk · November 18, 2022 at 3:00 pm
[url=https://valtrexd.online/]purchase generic valtrex online[/url]
Charlesaduse · November 18, 2022 at 3:27 pm
[url=https://sildenafilx.shop/]how can you get viagra online[/url]
Michaelemult · November 18, 2022 at 5:54 pm
[url=http://buywellbutrin.life/]bupropion zyban[/url]
ElwoodGon · November 18, 2022 at 6:27 pm
[url=http://finpecia.click/]finasteride 1mg price[/url]
TedCounk · November 18, 2022 at 10:38 pm
[url=https://tadalafila.org/]tadalafil for sale online[/url]
DenCounk · November 18, 2022 at 10:58 pm
[url=https://tretinoinretina.shop/]retin a gel coupon[/url]
RodneyTab · November 19, 2022 at 12:14 am
[url=https://dapoxetineavana.online/]dapoxetine 1mg[/url]
DarrylSef · November 19, 2022 at 5:58 am
[url=http://sildenafilgen.online/]sildenafil citrate 100mg tab[/url] [url=http://buyhydroxychloroquine.life/]hydroxychloroquine online[/url] [url=http://sildenafilx.shop/]can i buy viagra online in india[/url] [url=http://besthydroxychloroquine.com/]plaquenil 0.2[/url] [url=http://brandhydroxychloroquine.com/]hydroxychloroquine 100 mg[/url] [url=http://clomidtab.net/]can you buy clomid[/url] [url=http://keflexcephalexin.shop/]cephalexin buy[/url] [url=http://zoloftp.com/]buy zoloft generic online[/url]
Davidhup · November 19, 2022 at 8:33 am
[url=https://sildenafilgen.online/]where to buy female viagra usa[/url]
TimothyThive · November 19, 2022 at 10:51 am
[url=http://fluoxetinetab.com/]medication fluoxetine[/url]
DarrylSef · November 19, 2022 at 4:08 pm
[url=https://trustedpharmacy.quest/]cyprus online pharmacy[/url] [url=https://antabusetabs.com/]can you buy disulfiram over the counter[/url] [url=https://diflucantab.shop/]diflucan capsule 200 mg[/url] [url=https://angpharm.com/]furosemide 50 mg price[/url] [url=https://ampicillin.icu/]buy ampicillin[/url] [url=https://vardenafil247.online/]cheap levitra pills[/url] [url=https://prednisone.run/]buy deltasone online 40 mg[/url] [url=https://dapoxetine.site/]priligy usa buy[/url]
Michaelemult · November 19, 2022 at 8:04 pm
[url=http://citalopram.site/]citalopram 20 mg coupon[/url]
JimCounk · November 19, 2022 at 8:23 pm
[url=https://accutanex.online/]where to buy accutane[/url]
Edgarlor · November 20, 2022 at 3:26 am
[url=https://buytrazodone.life/]trazodone 50 mg medication[/url]
DavisMug · November 20, 2022 at 4:52 am
[url=https://buydrugstore.life/]canadian pharmacy without prescription[/url]
AshCounk · November 20, 2022 at 5:56 am
[url=https://clomid.click/]clomid nz[/url]
MarvinZem · November 20, 2022 at 8:28 am
[url=http://ataraxtab.online/]atarax for children[/url]
Estebanguall · November 20, 2022 at 11:45 am
[url=http://alevitra.com/]levitra canadian pharmacy[/url]
zyvox without prescription · November 20, 2022 at 12:33 pm
how to purchase antivert 25mg antivert online antivert no prescription
RobertFoold · November 20, 2022 at 5:23 pm
[url=https://alevitra.com/]levitra best price uk[/url]
MiclTek · November 20, 2022 at 6:15 pm
[url=https://prednisolonep.com/]cheap prednisolone[/url]
AlanCounk · November 20, 2022 at 6:16 pm
[url=https://synthroid.sbs/]buy synthroid uk[/url] [url=https://happyonlinedrugstore.monster/]trustworthy online pharmacy[/url]
RichardFaply · November 20, 2022 at 10:13 pm
[url=https://amoxil.sbs/]amoxil 250 tablet[/url] [url=https://lipitoratorvastatin.shop/]cost of lipitor in australia[/url] [url=https://antabuser.online/]order antabuse[/url] [url=https://dapoxetine.site/]priligy otc[/url] [url=https://diflucanfluconazole.org/]where to buy diflucan[/url]
WimCounk · November 21, 2022 at 1:05 am
[url=http://ventolinz.monster/]ventolin australia buy[/url]
Michaelemult · November 21, 2022 at 1:16 am
[url=http://modafinilsec.com/]modafinil order online india[/url]
MaryCounk · November 21, 2022 at 3:48 am
[url=http://albuteroltab.online/]proventil ventolin[/url] [url=http://modafiniltab.net/]modafinil online pharmacy india[/url] [url=http://cialisgenerictadalafil.com/]tadalafil 20mg price comparison[/url] [url=http://buymodafinil.life/]provigil buy online india[/url] [url=http://accutanex.online/]accutane generic canada[/url] [url=http://finasteridemed.com/]propecia tablet in india[/url] [url=http://cipro.run/]cipro over the counter drug[/url] [url=http://acyclovira.com/]acyclovir 200 mg coupon[/url]
Samuelraisk · November 21, 2022 at 5:11 am
[url=http://phenergan.site/]phenergan canada otc[/url]
JosephMaict · November 21, 2022 at 5:12 am
[url=http://buyprednisone.monster/]prednisone tabs[/url] [url=http://bbviagra.com/]cheap viagra generic best price[/url]
TedCounk · November 21, 2022 at 5:14 am
[url=http://drugstores.monster/]family store rx[/url]
Jameseloro · November 21, 2022 at 8:20 am
[url=http://cymbaltatabs.monster/]drug cymbalta[/url] [url=http://neurontin.run/]gabapentin 214[/url]
Curtisvibia · November 21, 2022 at 8:53 am
[url=https://propecia.click/]propecia india buy[/url]
MichaelDwego · November 21, 2022 at 9:53 am
[url=https://benicartab.shop/]benicar 12.5 mg[/url]
Estebanguall · November 21, 2022 at 11:59 am
[url=http://amitriptylinetab.com/]elavil online pharmacy[/url]
RodneyTab · November 21, 2022 at 12:49 pm
[url=https://pharmacynx.com/]canadian pharmacy 24 com[/url]
DarrylSef · November 21, 2022 at 6:38 pm
[url=https://buytetracycline.life/]terramycin nz[/url] [url=https://phenergan.site/]buying phenergan online[/url] [url=https://propecia.click/]how do i get propecia[/url] [url=https://sildenafilxd.com/]viagra 100 mg tablet price[/url] [url=https://pharmacynx.com/]reliable canadian pharmacy[/url]
MichaelGuabe · November 21, 2022 at 7:34 pm
[url=http://alevitra.com/]generic vardenafil canadian pharmacy[/url]
IvyCounk · November 21, 2022 at 10:42 pm
[url=http://synthroidm.online/]otc synthroid[/url] [url=http://cephalexin.site/]cephalexin 100[/url] [url=http://dexamethasonetab.com/]dexamethasone price uk[/url] [url=http://sildenafilpropills.com/]can you purchase viagra over the counter[/url] [url=http://sildenafiltabs.shop/]cost of sildenafil 100mg tablets[/url] [url=http://tretinoin.click/]retin-a 0.05 cream[/url] [url=http://accutanetabs.shop/]where to buy accutane uk[/url] [url=http://drugstores.monster/]affordable pharmacy[/url]
ElwoodGon · November 22, 2022 at 2:10 am
[url=https://antabuser.online/]antabuse otc[/url]
MiclTek · November 22, 2022 at 5:24 am
[url=https://buytrazodone.life/]trazodone 30 mg[/url]
TommyHepsy · November 22, 2022 at 10:33 am
[url=http://buyallopurinol.life/]allopurinol 300[/url]
EyeCounk · November 22, 2022 at 9:53 pm
[url=http://paxiltab.online/]paroxetine 200 mg[/url] [url=http://azithromycinc.online/]azithromycin medicine over the counter[/url]
JasonCounk · November 22, 2022 at 10:22 pm
[url=http://worldpharmacy.monster/]top online pharmacy india[/url]
SueCounk · November 23, 2022 at 12:00 am
[url=http://acyclovira.com/]zovirax pills cost[/url]
LisaCounk · November 23, 2022 at 12:42 am
[url=http://prednisonex.online/]deltasone 40 mg[/url]
KimCounk · November 23, 2022 at 4:54 am
[url=https://buysildenafil.life/]cheap sildenafil 100mg[/url]
KiaCounk · November 23, 2022 at 5:46 am
[url=http://buymodafinil.life/]cheap modafinil uk[/url]
RodneyTab · November 23, 2022 at 6:02 am
[url=https://cipro.live/]cost cipro[/url]
Shivede · November 23, 2022 at 7:18 am
The conclusions are likely to be reliable and the recommendations for research were appropriate buying cheap cialis online Case 2 involved a patient with breast cancer with multiple bone metastases
WimCounk · November 23, 2022 at 10:19 am
[url=http://tizanidinetab.monster/]zanaflex medication[/url]
NickCounk · November 23, 2022 at 12:55 pm
[url=https://sildenafiltabs.shop/]how to get viagra usa[/url]
SamCounk · November 23, 2022 at 1:04 pm
[url=https://synthroidlevothyroxine.shop/]buy synthroid 200 mcg[/url] [url=https://bactrim.fun/]160 bactrim[/url] [url=https://trazodone.run/]trazodone otc[/url] [url=https://azithromycinc.online/]zithromax price in india[/url]
MarvinZem · November 23, 2022 at 1:16 pm
[url=http://pharmacynx.com/]canadian pharmacy generic viagra[/url]
BooCounk · November 23, 2022 at 3:03 pm
[url=https://augmentingen.com/]online amoxicillin[/url]
MiaCounk · November 23, 2022 at 3:12 pm
[url=http://acyclovira.com/]acyclovir 800 mg tablets[/url]
ZakCounk · November 23, 2022 at 4:12 pm
[url=http://diclofenactab.quest/]voltaren gel india[/url]
WilliamWem · November 23, 2022 at 8:42 pm
[url=https://elaviltabs.shop/]elavil online[/url] [url=https://antabusetabs.com/]can you buy antabuse over the counter[/url] [url=https://ampicillin.icu/]ampicillin 1000 mg[/url] [url=https://orlistat.cfd/]orlistat 120mg for sale[/url]
Charlesaduse · November 23, 2022 at 10:05 pm
[url=http://trazodone.sbs/]trazodone brand name in india[/url]
YonCounk · November 23, 2022 at 10:53 pm
[url=http://cephalexin.site/]cephalexin 50 mg[/url]
JudyCounk · November 23, 2022 at 11:17 pm
[url=https://finasteridemed.com/]propecia buy online usa[/url]
MichaelGuabe · November 23, 2022 at 11:46 pm
[url=http://prednisolonep.com/]prednisolone 0.5[/url]
EvaCounk · November 24, 2022 at 3:57 am
[url=https://buymodafinil.life/]can you buy modafinil[/url]
JackCounk · November 24, 2022 at 7:36 am
[url=https://wellbutrina.monster/]order zyban online[/url]
ciprofloxacin price · November 24, 2022 at 10:44 am
cheapest crestor crestor 5 mg usa where can i buy crestor 5 mg
AmyCounk · November 24, 2022 at 2:49 pm
[url=https://stromectol.run/]ivermectin cost in usa[/url]
MaryCounk · November 24, 2022 at 2:52 pm
[url=http://wellbutrina.monster/]wellbutrin 200 mg[/url] [url=http://bactrimd.online/]bactrim 40 200 mg[/url] [url=http://modafinilp.shop/]where can i purchase modafinil[/url] [url=http://worldpharmacy.monster/]pharmacy online uae[/url] [url=http://cephalexin.site/]otc cephalexin[/url] [url=http://cymbaltatab.com/]cymbalta in mexico[/url] [url=http://azithromycinc.online/]zithromax z-pak[/url]
Michaeldrist · November 24, 2022 at 3:19 pm
[url=https://buyvalacyclovironline.com/]cost of valtrex[/url]
Estebanguall · November 24, 2022 at 4:57 pm
[url=http://propeciatabs.online/]how to order propecia[/url]
UgoCounk · November 24, 2022 at 5:57 pm
[url=http://afinasteride.com/]cheap propecia india[/url]
Bradyveima · November 24, 2022 at 11:28 pm
Herr Dr. med. Peter Hamoshi
AshCounk · November 24, 2022 at 11:59 pm
[url=https://doxycycline.site/]doxycyline online[/url]
Samuelraisk · November 25, 2022 at 12:58 am
[url=http://wellbutrintab.shop/]bupropion hcl xl[/url]
EyeCounk · November 25, 2022 at 4:20 am
[url=http://antabuse.icu/]antabuse prescription drug[/url] [url=http://dexamethasonetab.com/]dexamethasone 4 mg[/url]
ElwoodGon · November 25, 2022 at 5:08 am
[url=https://buytrazodone.life/]prescription drug desyrel[/url]
RichardFaply · November 25, 2022 at 6:35 am
[url=https://buyvalacyclovironline.com/]can i order valtrex online[/url] [url=https://prednisolonep.com/]prednisolone 10 mg[/url] [url=https://sildenafilxd.com/]viagra pills for sale[/url] [url=https://buylevitra.monster/]40 mg levitra[/url] [url=https://amitriptylinetab.com/]purchase elavil without a prescription[/url]
TimothyThive · November 25, 2022 at 7:23 am
[url=http://diflucanfluconazole.org/]can i buy diflucan over the counter[/url]
MichaelDwego · November 25, 2022 at 7:33 am
[url=https://propecia.click/]cheap propecia canada[/url]
ZakCounk · November 25, 2022 at 9:53 am
[url=https://valtrexvalacyclovir.shop/]can you order valtrex online[/url]
WilliamWem · November 25, 2022 at 10:17 am
[url=https://cialis365.com/]where to buy cialis online in usa[/url] [url=https://neurontin.life/]drug neurontin 20 mg[/url] [url=https://sildenafilgenericviagra.com/]sildenafil buy usa[/url] [url=https://albendazole.life/]albendazole 200mg[/url] [url=https://canadianpharm.monster/]compare pharmacy prices[/url]
MarkCounk · November 25, 2022 at 12:09 pm
[url=https://buyclopidogrel.life/]plavix 75 mg canada[/url]
SamCounk · November 25, 2022 at 1:22 pm
[url=https://prozactab.online/]10mg fluoxetine uk[/url] [url=https://prozactab.monster/]prozac online australia[/url]
PaulCounk · November 25, 2022 at 2:01 pm
[url=https://buycipro.life/]ciprofloxacin online uk[/url]
Curtisvibia · November 25, 2022 at 4:51 pm
[url=https://canadianpharm.monster/]happy family pharmacy.com[/url]
Edgarlor · November 25, 2022 at 5:43 pm
[url=https://avana.run/]avana canada[/url]
JasonCounk · November 25, 2022 at 10:46 pm
[url=https://pregabalinlyrica.shop/]lyrica for sale uk[/url]
Estebanguall · November 25, 2022 at 11:24 pm
[url=http://stratteratab.com/]strattera capsule[/url]
AnnaCounk · November 26, 2022 at 3:59 am
[url=https://arimidex.site/]how to get arimidex prescription[/url]
Davidhup · November 26, 2022 at 5:50 am
[url=http://buyclopidogrel.monster/]buy clopidogrel[/url]
JosephMaict · November 26, 2022 at 7:43 am
[url=https://buylipitor.life/]lipitor canada price[/url] [url=https://paxil.icu/]paxil no rx[/url] [url=https://levitratab.shop/]20 mg levitra price[/url] [url=https://buypriligy.monster/]dapoxetine 30mg tablet[/url]
Michaelemult · November 26, 2022 at 7:44 am
[url=http://buypriligy.monster/]where can i buy priligy[/url]
PaulCounk · November 26, 2022 at 7:54 am
[url=https://buybactrim.life/]bactrim ds without prescription[/url]
TeoCounk · November 26, 2022 at 1:43 pm
[url=https://priligytab.monster/]buy priligy in canada[/url]
TommyHepsy · November 26, 2022 at 3:07 pm
[url=http://lexaproescitalopram.shop/]lexapro 80 mg[/url]
MarkCounk · November 26, 2022 at 3:30 pm
[url=https://pregabalinlyrica.shop/]generic lyrica usa[/url]
Estebanguall · November 26, 2022 at 5:03 pm
[url=http://modafinilb.online/]modafinil 200mg australia[/url]
Edgarlor · November 26, 2022 at 7:05 pm
[url=https://levitratab.shop/]levitra 20mg price australia[/url]
Samuelraisk · November 26, 2022 at 7:35 pm
[url=http://ordertadalafiltablets.com/]real cialis[/url]
Estebanguall · November 26, 2022 at 10:53 pm
[url=http://avana.run/]generic dapoxetine uk[/url]
CarlCounk · November 27, 2022 at 2:35 am
[url=http://fluoxetine247.com/]buy prozac tablets[/url]
RodneyTab · November 27, 2022 at 4:31 am
[url=https://pharmacies.monster/]canadapharmacyonline legit[/url]
Estebanguall · November 27, 2022 at 5:21 am
[url=http://bactrimd.quest/]bactrim prices[/url]
TedCounk · November 27, 2022 at 10:18 am
[url=https://pharmacies.quest/]legitimate canadian online pharmacies[/url]
ElwoodGon · November 27, 2022 at 11:56 am
[url=http://buysingulair.life/]can you purchase singulair over the counter[/url]
DenCounk · November 27, 2022 at 12:44 pm
[url=https://arimidex.site/]buy arimidex canada[/url]
IvyCounk · November 27, 2022 at 6:15 pm
[url=http://cephalexinv.com/]buy cephalexin online no prescription[/url] [url=http://acutane.monster/]where to get accutane in singapore[/url] [url=http://flomax.run/]canada flomax[/url] [url=http://trazodonedesyrel.shop/]trazodone 25 mg[/url] [url=http://tamoxifen.sbs/]tamoxifen pills[/url] [url=http://clopidogrelplavix.shop/]clopidogrel 70 mg[/url] [url=http://cleocin.cfd/]where can i buy clindamycin[/url] [url=http://arimidex.site/]arimidex for gyno[/url]
RicIsose · November 27, 2022 at 8:07 pm
[url=http://buylevitra.quest/]buy vardenafil with paypal[/url] [url=http://bactrimd.quest/]bactrim antibiotic online prescriptions[/url] [url=http://zofran.click/]zofran 4 mg iv[/url] [url=http://albendazole.life/]albendazole for sale online[/url] [url=http://avanadapoxetine.online/]dapoxetine online india[/url]
RobertFoold · November 28, 2022 at 2:00 am
[url=https://ordertadalafiltablets.com/]cialis best price uk[/url]
DavisMug · November 28, 2022 at 6:30 am
[url=https://ampicillin.run/]ampicillin sodium[/url]
WilliamWem · November 28, 2022 at 8:26 am
[url=https://trustedpharm.online/]canadian pharmacy no scripts[/url] [url=https://zofran.click/]zofran 2mg[/url] [url=https://lexaproescitalopram.shop/]generic for cipralex[/url] [url=https://suhagratabs.online/]suhagra 25[/url]
CarlCounk · November 28, 2022 at 11:33 am
[url=http://dexamethasonetab.online/]dexamethasone 2 mg[/url]
JoeCounk · November 28, 2022 at 1:27 pm
[url=http://pharmacies.quest/]mexican pharmacies online drugs[/url] [url=http://priligy.run/]dapoxetine 30[/url] [url=http://prozactab.online/]average cost of prozac[/url] [url=http://advairtab.online/]advair diskus 250 50[/url] [url=http://tamoxifen.sbs/]where can i buy nolvadex[/url] [url=http://doxycyclinep.com/]doxycycline 200 mg capsules[/url]
JosephMaict · November 28, 2022 at 2:17 pm
[url=https://benicar.cfd/]benicar 20 mg price in india[/url] [url=https://ordertadalafiltablets.com/]cialas[/url] [url=https://ampicillin.run/]ampicillin price in south africa[/url] [url=https://albuterolv.online/]albuterol over the counter usa[/url] [url=https://buylevitra.quest/]buy levitra usa[/url] [url=https://levitratab.shop/]20 mg levitra[/url]
JackCounk · November 28, 2022 at 2:19 pm
[url=http://acutane.monster/]buy generic accutane online[/url]
BooCounk · November 28, 2022 at 7:17 pm
[url=https://seroquelquetiapine.shop/]seroquel for anxiety[/url]
MichaelGuabe · November 29, 2022 at 2:47 am
[url=https://pharmacies.monster/]online pharmacy reddit[/url]
RodneyTab · November 29, 2022 at 5:01 am
[url=https://lipitoratorvastatin.online/]lipitor 20 mg price in india[/url]
Charlesaduse · November 29, 2022 at 10:01 am
[url=https://furosemidetabs.shop/]lasix medicine[/url]
AlanCounk · November 29, 2022 at 10:21 am
[url=http://buymotrin.monster/]motrin cream[/url] [url=http://tamoxifen.sbs/]nolvadex 40 mg[/url] [url=http://tretinointabs.quest/]retin a 05 coupon[/url] [url=http://retinoatabs.online/]retino 05[/url] [url=http://advairtab.online/]advair cheap price[/url] [url=http://zoloftx.online/]buy generic zoloft[/url]
LisaCounk · November 29, 2022 at 10:52 am
[url=https://cleocin.cfd/]cleocin 300 mg price[/url]
DarrylSef · November 29, 2022 at 1:01 pm
[url=http://trustedpharm.online/]online pet pharmacy[/url] [url=http://pharmacies.monster/]no prescription pharmacy paypal[/url] [url=http://viagra120.com/]viagra generic online pharmacy[/url] [url=http://bactrimd.quest/]order septra online[/url] [url=http://buypriligy.monster/]dapoxetine 60 mg price[/url] [url=http://cialis365.com/]viagra cialis levitra online[/url] [url=http://zofran.icu/]24 zofran prices[/url]
JudyCounk · November 29, 2022 at 6:29 pm
[url=http://advairtab.online/]advair prescription price[/url]
order spiriva 9mcg · November 29, 2022 at 9:07 pm
micardis medication how to buy micardis how to buy micardis 40mg
TimothyThive · November 29, 2022 at 10:59 pm
[url=https://buylevitra.quest/]vardenafil online pharmacy[/url]
Jameseloro · November 30, 2022 at 2:04 am
[url=http://paxil.icu/]best price paroxetine[/url] [url=http://zofran.click/]buy zofran in mexico[/url] [url=http://trazodonex.online/]trazodone 700 mg[/url] [url=http://sildenafilgenericviagra.com/]buy generic sildenafil uk[/url] [url=http://canadianpharm.monster/]canada pharmacy online legit[/url]
KimCounk · November 30, 2022 at 9:22 am
[url=http://plavixtabs.quest/]cost plavix 300 mg[/url]
Michaelemult · November 30, 2022 at 9:52 am
[url=http://modafinilb.online/]modafinil 2014[/url]
KadennaG · November 30, 2022 at 11:16 am
pujcka
SamCounk · November 30, 2022 at 1:42 pm
[url=https://buyaugmentin.life/]buy augmentin[/url] [url=https://cephalexinv.com/]keflex cream cost[/url] [url=https://clopidogrelplavix.shop/]plavix prescription[/url] [url=https://cleocin.cfd/]clindamycin cost[/url] [url=https://buymotrin.monster/]motrin 200 mg tablet[/url]
MichaelDwego · November 30, 2022 at 1:42 pm
[url=https://stratteratab.com/]how to buy strattera online[/url]
Samuelraisk · November 30, 2022 at 8:02 pm
[url=http://amoxil.click/]amoxicillin over the counter[/url]
MaryCounk · November 30, 2022 at 9:14 pm
[url=https://buymotrin.monster/]motrin 800 mg otc[/url] [url=https://buyvaltrex.life/]how to get valtrex prescription[/url] [url=https://hydroxychloroquinetab.shop/]hydroxychloroquine sulfate 200mg[/url] [url=https://lasixtabs.shop/]buying furosemide online[/url] [url=https://flomax.run/]flomax cost comparison[/url] [url=https://doxycyclinep.com/]doxycycline 400 mg daily[/url]
Edgarlor · November 30, 2022 at 9:17 pm
[url=https://viagra120.com/]sildenafil buy over the counter[/url]
SueCounk · December 1, 2022 at 12:59 am
[url=http://citalopram.click/]generic celexa price[/url]
crestor uk · December 1, 2022 at 1:16 am
glimepiride no prescription glimepiride without a prescription glimepiride united kingdom
Curtisvibia · December 1, 2022 at 2:11 am
[url=https://buyantabuse.life/]cost price antabuse[/url]
DarrylSef · December 1, 2022 at 4:12 am
[url=http://buyfildena.life/]fildena 100mg[/url] [url=http://priligy.life/]dapoxetine online pharmacy india[/url] [url=http://fildenatab.shop/]fildena 100 mg for sale[/url]
Michaelemult · December 1, 2022 at 2:58 pm
[url=http://priligy.life/]priligy tablets us[/url]
Bentleyveima · December 1, 2022 at 4:43 pm
http://hnoarzt.com.de/blomberg
SueCounk · December 1, 2022 at 7:31 pm
[url=http://retinoatab.quest/]retino 0.05 price[/url]
Samuelraisk · December 1, 2022 at 10:17 pm
[url=https://retino.online/]retino 0.25 cream[/url]
JoeCounk · December 1, 2022 at 10:55 pm
[url=http://azithromycinz.shop/]azithromycin cost australia[/url] [url=http://hydroxychloroquinewithoutrx.com/]quineprox 60mg[/url] [url=http://allopurinolzyloprim.online/]allopurinol coupon[/url] [url=http://prozactabs.com/]how to get prozac online[/url] [url=http://buytetracycline.monster/]tetracycline antibiotic[/url] [url=http://buytretinoin.monster/]tretinoin 05 india[/url] [url=http://motrintab.online/]canada motrin 400 mg[/url] [url=http://atarax.run/]atarax 12.5 mg[/url]
TimothyThive · December 1, 2022 at 11:47 pm
[url=http://albuteroltabs.quest/]albuterol for daily use[/url]
YonCounk · December 2, 2022 at 1:48 am
[url=https://celexacitalopram.online/]celexa 30 mg[/url]
JaneCounk · December 2, 2022 at 4:54 am
[url=http://tadalafil2023.com/]can i buy real cialis online[/url]
Michaelemult · December 2, 2022 at 5:12 am
[url=https://sildenafiltz.com/]buy viagra over the counter uk[/url]
AmyCounk · December 2, 2022 at 5:26 am
[url=http://clopidogreltabs.online/]clopidogrel 75 mg tablets price in india[/url]
EvaCounk · December 2, 2022 at 5:55 am
[url=https://elavilamitriptyline.shop/]cost of amitriptyline canada[/url]
Estebanguall · December 2, 2022 at 7:22 am
[url=https://ciprof.online/]cheap generic cipro without prescription[/url]
RobertFoold · December 2, 2022 at 9:47 am
[url=http://biaxin.life/]biaxin pill[/url]
BooCounk · December 2, 2022 at 11:17 am
[url=https://ventolinz.monster/]albuterol from canada no prescription[/url]
Samuelraisk · December 2, 2022 at 12:26 pm
[url=https://buyclonidine.life/]clonidine prescription medication[/url]
DarrylSef · December 2, 2022 at 1:06 pm
[url=https://sertralinezoloft.online/]zoloft 2019[/url] [url=https://ataraxtab.shop/]can you buy atarax over the counter uk[/url] [url=https://indocin.icu/]indocin[/url] [url=https://nolvadex.life/]buy nolvadex online cheap[/url] [url=https://arimidextabs.online/]arimidex pills buy[/url]
JasonCounk · December 2, 2022 at 1:14 pm
[url=https://inderal.fun/]propranolol 80[/url]
Michaeldrist · December 2, 2022 at 2:57 pm
[url=https://allopurinol.life/]allopurinol 30 mg[/url]
ElwoodGon · December 2, 2022 at 3:09 pm
[url=https://indocin.icu/]indocin[/url]
Finneganveima · December 2, 2022 at 3:50 pm
10000 euron lainaa
Michaeldrist · December 2, 2022 at 6:38 pm
[url=https://singulairtabs.online/]cheap singulair[/url]
avapro 150mg tablet · December 2, 2022 at 8:52 pm
buy vantin 200mg vantin generic vantin cost
AnnaCounk · December 2, 2022 at 9:56 pm
[url=https://buydoxycycline.life/]doxycycline without a prescription[/url]
Davidhup · December 3, 2022 at 2:35 am
[url=https://biaxin.life/]biaxin coupon[/url]
JackCounk · December 3, 2022 at 3:09 am
[url=http://piroxicamtab.shop/]piroxicam buy online[/url]
MiclTek · December 3, 2022 at 5:11 am
[url=https://buydapoxetine.monster/]priligy pills[/url]
Estebanguall · December 3, 2022 at 7:33 am
[url=https://prednisolone247.com/]prednisolone uk[/url]
NickCounk · December 3, 2022 at 12:17 pm
[url=https://wellbutrintab.online/]wellbutrin coupon[/url]
Victorveima · December 3, 2022 at 12:52 pm
http://immobilienunternehmen.com.de/bad-kleinen
RichardFaply · December 3, 2022 at 1:06 pm
[url=http://sildenafiltz.com/]sildenafil 120[/url] [url=http://hydroxychloroquinelab.com/]plaquenil price uk[/url] [url=http://gabapentinz.com/]gabapentin 5027[/url] [url=http://nolvadex.fun/]nolvadex to buy[/url] [url=http://onepharmacy.shop/]worldwide pharmacy online[/url] [url=http://buyatarax.life/]atarax 25mg prescription[/url]
Jameseloro · December 3, 2022 at 1:49 pm
[url=https://allopurinol.life/]allopurinol daily[/url] [url=https://indocin.icu/]500 mg indocin[/url] [url=https://levaquin.cfd/]levaquin cost[/url] [url=https://celexacitalopram.shop/]citalopram hydrobromide 20 mg[/url] [url=https://disulfiram.cfd/]disulfiram drug brand name[/url] [url=https://buydapoxetine.monster/]priligy pills usa[/url] [url=https://hydroxychloroquinetabs.online/]hydroxychloroquine tablet ip 200 mg[/url]
cost of celebrex · December 3, 2022 at 5:40 pm
imdur 60 mg prices imdur 30mg online order imdur 20 mg
MarvinZem · December 3, 2022 at 5:59 pm
[url=https://prednisolone247.com/]buy online 10mg prednisolone[/url]
JaneCounk · December 3, 2022 at 7:18 pm
[url=http://allopurinolzyloprim.online/]allopurinol cost nz[/url]
MichaelGuabe · December 3, 2022 at 8:02 pm
[url=http://singulairtabs.online/]singulair price australia[/url]
Samuelraisk · December 3, 2022 at 8:10 pm
[url=https://neurontinx.com/]gabapentin 800 mg tablet[/url]
ElwoodGon · December 3, 2022 at 8:36 pm
[url=https://ataraxtab.shop/]atarax 25mg uk[/url]
Charlesaduse · December 3, 2022 at 9:03 pm
[url=http://noroxintab.online/]noroxin 400 mg canada price[/url]
EyeCounk · December 4, 2022 at 1:01 am
[url=https://elavilamitriptyline.shop/]amitriptyline 25 mg tablet price[/url] [url=https://atarax.run/]atarax price canada[/url] [url=https://nolvadextab.online/]where to buy tamoxifen uk[/url] [url=https://prednisone247.com/]where to get prednisone[/url] [url=https://allopurinolzyloprim.online/]allopurinol 200[/url]
AnnaCounk · December 4, 2022 at 1:43 am
[url=https://buytetracycline.monster/]tetracycline purchase[/url]
JudyCounk · December 4, 2022 at 1:46 am
[url=http://erectafil.life/]erectafil 5mg[/url]
RicIsose · December 4, 2022 at 4:56 am
[url=https://prednisolone247.com/]prednisolone sodium phosphate[/url] [url=https://onepharmacy.shop/]capsule online pharmacy[/url] [url=https://viarga.shop/]where can i buy viagra over the counter canada[/url] [url=https://ataraxtab.shop/]100mg atarax[/url] [url=https://ciprof.online/]ciprofloxacin 500mg price in india[/url] [url=https://neurontinx.com/]neurontin 100mg tab[/url] [url=https://buyclonidine.life/]clonidine tab 0.1 mg price in india[/url] [url=https://buykamagra.life/]kamagra jelly australia[/url]
MaryCounk · December 4, 2022 at 7:42 am
[url=https://nolvadextab.online/]tamoxifen australia[/url] [url=https://allopurinolzyloprim.online/]purchase allopurinol online[/url]
EvaCounk · December 4, 2022 at 10:58 am
[url=https://motrintab.online/]motrin 600 otc[/url]
Thiagoveima · December 4, 2022 at 12:07 pm
emprunter 6000 €
WilliamWem · December 4, 2022 at 12:53 pm
[url=http://zoloftsertraline.online/]generic for zoloft[/url] [url=http://agabapentin.online/]medication neurontin 300 mg[/url] [url=http://levaquin.cfd/]drug levaquin[/url]
furosemide usa · December 4, 2022 at 2:33 pm
how to buy calcium carbonate calcium carbonate no prescription calcium carbonate price
LisaCounk · December 4, 2022 at 4:56 pm
[url=https://piroxicamtab.shop/]buy feldene gel[/url]
YonCounk · December 4, 2022 at 5:18 pm
[url=https://inderal.cfd/]propranolol 40mg[/url]
DavisMug · December 4, 2022 at 11:03 pm
[url=http://sertralinezoloft.online/]zoloft brand coupon[/url]
AshCounk · December 5, 2022 at 9:22 am
[url=https://lisinoprilb.quest/]lisinopril 20 mg tablets[/url]
cost of strattera 25mg · December 5, 2022 at 10:26 am
seroquel nz seroquel 300mg online seroquel 300mg without a prescription
RichardFaply · December 5, 2022 at 10:54 am
[url=http://clindamycina.online/]cleocin 300 mg coupon[/url] [url=http://buyatarax.life/]atarax price[/url] [url=http://retino.online/]retino 0.5 cream price[/url]
Charlesaduse · December 5, 2022 at 12:56 pm
[url=http://deltasonetabs.monster/]prednisone 2.5 mg daily[/url]
Emmanuelveima · December 5, 2022 at 1:29 pm
Kieferorthopade Holzminden
TommyHepsy · December 5, 2022 at 1:34 pm
[url=https://buyclonidine.life/]clonidine iv[/url]
Samuelraisk · December 5, 2022 at 3:37 pm
[url=https://buykamagra.life/]kamagra india buy[/url]
Edgarlor · December 5, 2022 at 4:34 pm
[url=http://indocin.icu/]indocin price[/url]
RobertFoold · December 5, 2022 at 4:38 pm
[url=http://allopurinol.life/]allopurinol medicine[/url]
Michaelemult · December 5, 2022 at 8:39 pm
[url=https://zoloftsertraline.online/]zoloft in mexico[/url]
ZakCounk · December 5, 2022 at 10:58 pm
[url=https://azithromycinz.shop/]zithromax azithromycin[/url]
TommyHepsy · December 6, 2022 at 12:52 am
[url=https://zoloftsertraline.online/]zoloft canada[/url]
DarrylSef · December 6, 2022 at 2:50 am
[url=https://biaxin.life/]biaxin for strep throat[/url] [url=https://glucophage.sbs/]metformin.com[/url] [url=https://advairtabs.online/]advair 500[/url]
MiclTek · December 6, 2022 at 3:15 am
[url=https://nolvadex.life/]prescription nolvadex[/url]
MichaelDwego · December 6, 2022 at 3:29 am
[url=http://retino.online/]retino 0.025[/url]
atorvastatin uk · December 6, 2022 at 8:25 am
buy nortriptyline 25mg where to buy nortriptyline nortriptyline 25mg pharmacy
SamCounk · December 6, 2022 at 10:52 am
[url=https://fildena.click/]fildena buy online[/url] [url=https://nolvadextab.online/]can you buy nolvadex otc[/url] [url=https://prozactabs.com/]fluoxetine price canada[/url] [url=https://provigiltabs.online/]modafinil 100[/url]
ElwoodGon · December 6, 2022 at 11:17 am
[url=https://suhagram.online/]buy suhagra online[/url]
AmyCounk · December 6, 2022 at 4:19 pm
[url=http://trustedtablets.sale/]pharmacy com[/url]
Walkerveima · December 6, 2022 at 5:30 pm
laanpengeonline.info/laan-9000-kr
JosephMaict · December 6, 2022 at 10:27 pm
[url=http://indocin.icu/]indocin price[/url] [url=http://prednisolone247.com/]online pharmacy uk prednisolone[/url] [url=http://sildenafiltz.com/]china viagra[/url] [url=http://singulairtabs.online/]how much is generic singulair[/url] [url=http://buyazithromycin.monster/]can you buy zithromax over the counter in canada[/url] [url=http://retino.online/]retino 0.5 cream price[/url]
WimCounk · December 7, 2022 at 1:46 am
[url=http://elavilamitriptyline.online/]amitriptyline 2101[/url]
JaneCounk · December 7, 2022 at 3:13 am
[url=http://sildalist.online/]buy sildalis 120 mg[/url]
hyzaar online · December 7, 2022 at 4:29 am
cost of cephalexin cephalexin no prescription cephalexin without a doctor prescription
RichardFaply · December 7, 2022 at 8:17 am
[url=http://biaxin.life/]biaxin for sale[/url] [url=http://buyazithromycin.monster/]azithromycin 500 mg otc[/url] [url=http://buycelexa.life/]citalopram hydrobromide 40 mg[/url] [url=http://noroxintab.online/]noroxin[/url] [url=http://viarga.shop/]cheap sildenafil 100mg[/url] [url=http://gabapentinz.com/]gabapentin 100mg price[/url]
Edgarlor · December 7, 2022 at 8:56 am
[url=http://lipitor.site/]brand name lipitor[/url]
RodneyTab · December 7, 2022 at 10:56 am
[url=http://sildenafiltz.com/]viagra sale online[/url]
KiaCounk · December 7, 2022 at 11:43 am
[url=https://piroxicamtab.shop/]feldene gel prices[/url]
Curtisvibia · December 7, 2022 at 1:47 pm
[url=http://erythromycin.life/]where can i buy erythromycin 333mg[/url]
WimCounk · December 7, 2022 at 7:12 pm
[url=http://metformin247.com/]1500 mg metformin[/url]
MarvinZem · December 8, 2022 at 1:05 am
[url=http://albuterol.icu/]ventolin online canada[/url]
JimCounk · December 8, 2022 at 1:30 am
[url=http://fluoxetinetabs.com/]generic prozac online[/url]
RicIsose · December 8, 2022 at 5:23 am
[url=http://motrintabs.shop/]motrin 300 mg[/url] [url=http://buydisulfiram.life/]antabuse where to buy[/url]
KimCounk · December 8, 2022 at 5:52 am
[url=http://fluoxetinetabs.com/]fluoxetine mexico[/url]
furosemide medication · December 8, 2022 at 7:55 am
cost of sildenafil sildenafil over the counter cheapest sildenafil
DarrylSef · December 8, 2022 at 11:35 am
[url=http://albuterol.icu/]albuterol[/url] [url=http://prozac24.com/]fluoxetine dr[/url] [url=http://bupropiontab.monster/]cost of zyban in australia[/url]
Michaeldrist · December 8, 2022 at 1:45 pm
[url=http://citalopramtab.quest/]celexa tablet[/url]
JasonCounk · December 8, 2022 at 1:56 pm
[url=https://clomipheneclomid.online/]where can i get clomid tablets[/url]
DenCounk · December 8, 2022 at 2:38 pm
[url=https://tamoxifentab.com/]where to buy nolvadex[/url]
Davidhup · December 8, 2022 at 4:08 pm
[url=http://phenergantab.online/]where to buy phenergan[/url]
EvaCounk · December 8, 2022 at 4:27 pm
[url=http://medstore911.com/]trust pharmacy[/url]
TimothyThive · December 8, 2022 at 4:32 pm
[url=http://bupropiontab.monster/]zyban purchase[/url]
LisaCounk · December 8, 2022 at 4:34 pm
[url=https://buyprozac.monster/]how to get prozac[/url]
DavisMug · December 8, 2022 at 5:02 pm
[url=https://zofran.sbs/]zofran where to buy[/url]
MarkCounk · December 8, 2022 at 5:42 pm
[url=https://medstore911.com/]canadianpharmacymeds[/url]
JaneCounk · December 8, 2022 at 11:43 pm
[url=http://phenergantabs.quest/]phenergan over the counter[/url]
UgoCounk · December 9, 2022 at 12:39 am
[url=http://lexaproescitalopram.online/]lexapro 5mg[/url]
PaulCounk · December 9, 2022 at 12:57 am
[url=https://citalopramcelexa.online/]citalopram 20mg coupon[/url]
MichaelGuabe · December 9, 2022 at 1:31 am
[url=http://prozac24.com/]price of prozac[/url]
MiaCounk · December 9, 2022 at 2:19 am
[url=http://viagra2023.com/]australia generic viagra[/url]
JosephMaict · December 9, 2022 at 3:03 am
[url=http://happydrugstores.online/]top mail order pharmacies[/url] [url=http://tetracyclinesumycin.shop/]terramycin eye ointment for dogs[/url]
RodneyTab · December 9, 2022 at 5:58 am
[url=https://trazodone247.com/]100 mg trazodone[/url]
avapro 300mg over the counter · December 9, 2022 at 7:19 am
order lamotrigine lamotrigine pharmacy buy lamotrigine
KiaCounk · December 9, 2022 at 8:33 am
[url=https://flagylmetronidazole.online/]where to buy flagyl[/url]
AlanCounk · December 9, 2022 at 10:05 am
[url=https://suhagra.life/]suhagra 100 pill[/url] [url=https://yasmindrospirenone.shop/]order yasmin online[/url] [url=https://seroqueltab.com/]seroquel cream[/url] [url=https://abilifytabs.monster/]abilify 5mg price[/url] [url=https://buyprozac.monster/]prozac 30 mg capsules[/url] [url=https://clomipheneclomid.online/]how much is clomid[/url] [url=https://citalopramcelexa.online/]celexa 120 mg[/url]
CarlCounk · December 9, 2022 at 11:34 am
[url=https://clomipheneclomid.online/]where to buy clomid[/url]
UgoCounk · December 9, 2022 at 12:36 pm
[url=http://cafergot.cfd/]cafergot 1mg 100mg[/url]
MichaelDwego · December 9, 2022 at 1:19 pm
[url=https://phenergantab.shop/]12.5 mg phenergan[/url]
Estebanguall · December 9, 2022 at 1:30 pm
[url=https://fildenax.monster/]fildena 120 mg[/url]
PaulCounk · December 9, 2022 at 6:18 pm
[url=https://avodart.life/]buy avodart online uk[/url]
EyeCounk · December 9, 2022 at 6:25 pm
[url=https://cozaar.life/]buy brand name cozaar[/url] [url=https://buyanafranil.monster/]anafranil price in south africa[/url] [url=https://celexatab.monster/]cost of generic celexa[/url] [url=https://seroqueltab.com/]seroquel 100 pill[/url] [url=https://priligydapoxetine.shop/]buy priligy nz[/url] [url=https://cleocintabs.shop/]how much is clindamycin pills[/url]
Lewisveima · December 9, 2022 at 8:04 pm
Kredit uber 25000 Euro zinsen
ZakCounk · December 9, 2022 at 8:15 pm
[url=https://happydrugstores.quest/]usa pharmacy[/url]
Samuelraisk · December 10, 2022 at 12:54 am
[url=https://anafranil.life/]anafranil cost[/url]
TeoCounk · December 10, 2022 at 4:19 am
[url=https://buyprozac.monster/]prozac tablets canada[/url]
periactin tablet · December 10, 2022 at 6:19 am
cheap zanaflex zanaflex 2mg united kingdom zanaflex 4 mg tablets
RobertFoold · December 10, 2022 at 6:20 am
[url=https://happyfamilyrx.store/]best india pharmacy[/url]
Edgarlor · December 10, 2022 at 1:07 pm
[url=https://genericpropeciaonline.com/]propecia 1mg india[/url]
DavisMug · December 10, 2022 at 2:28 pm
[url=https://hydroxyzine.life/]atarax cost uk[/url]
AnnaCounk · December 10, 2022 at 2:41 pm
[url=http://medstore911.com/]online pharmacy products[/url]
SueCounk · December 10, 2022 at 6:31 pm
[url=http://priligydapoxetine.shop/]priligy usa buy[/url]
CarlCounk · December 10, 2022 at 8:38 pm
[url=https://singulaira.online/]singulair tablets cost[/url]
JackCounk · December 10, 2022 at 9:14 pm
[url=http://seroqueltab.com/]seroquel 300 mg tablet[/url]
Curtisvibia · December 10, 2022 at 11:43 pm
[url=https://happyfamilyrx.store/]best online pharmacy no prescription[/url]
TedCounk · December 10, 2022 at 11:56 pm
[url=https://priligy.icu/]buy dapoxetine uk[/url]
Estebanguall · December 11, 2022 at 2:29 am
[url=https://trazodone247.com/]trazodone 150 price[/url]
spironolactone 100mg for sale · December 11, 2022 at 4:34 am
finasteride medication finasteride 1 mg without prescription buy finasteride 1 mg
MiclTek · December 11, 2022 at 5:09 am
[url=http://yasmindrospirenone.online/]buy yasmin online uk[/url]
AshCounk · December 11, 2022 at 6:37 am
[url=https://lyricatabs.quest/]buy lyrica online[/url]
JimCounk · December 11, 2022 at 7:17 am
[url=http://citalopram.icu/]generic celexa[/url]
WilliamWem · December 11, 2022 at 1:22 pm
[url=https://citalopram.sbs/]celexa 2g[/url] [url=https://clonidinetab.shop/]purchase clonidine[/url] [url=https://ventolinwithoutprescription.com/]combivent inhaler price[/url]
KiaCounk · December 11, 2022 at 2:15 pm
[url=https://viagra2023.com/]how to get viagra cheap[/url]
JimCounk · December 11, 2022 at 2:31 pm
[url=http://yasmindrospirenone.shop/]yasmin tablet cost[/url]
ElwoodGon · December 12, 2022 at 12:15 am
[url=http://motrintabs.shop/]motrin 122[/url]
cipro purchase · December 12, 2022 at 6:45 am
diamox 250mg otc diamox united states diamox 250mg without prescription
JoeCounk · December 12, 2022 at 8:37 am
[url=http://buyanafranil.monster/]125mg anafranil[/url] [url=http://buyampicillin.life/]ampicillin 500 mg tablet price[/url]
Estebanguall · December 12, 2022 at 12:41 pm
[url=https://amitriptylineelavil.online/]amitriptyline canadian pharmacy[/url]
TedCounk · December 12, 2022 at 1:50 pm
[url=https://clomipheneclomid.online/]clomid mexico[/url]
MarvinZem · December 12, 2022 at 2:16 pm
[url=http://happyfamilyrx.store/]pharmacy store[/url]
JaneCounk · December 12, 2022 at 3:46 pm
[url=http://priligy.icu/]dapoxetine brand in india[/url]
DenCounk · December 12, 2022 at 5:20 pm
[url=https://zofran.site/]zofran 8 mg tablet[/url]
Davidhup · December 12, 2022 at 6:06 pm
[url=http://buypaxil.life/]paxil 80 mg[/url]
Samuelraisk · December 12, 2022 at 8:57 pm
[url=https://nexiumtabs.online/]nexium cheap uk[/url]
UgoCounk · December 12, 2022 at 11:08 pm
[url=http://tetracyclinetab.online/]tetracycline online without prescription[/url]
Reedinwark · December 13, 2022 at 12:53 am
Allergie Asthma Sinuszentrum
Charlesaduse · December 13, 2022 at 4:07 am
[url=http://genericpropeciaonline.com/]propecia 5mg sale[/url]
JasonCounk · December 13, 2022 at 5:01 am
[url=https://clomipheneclomid.online/]clomid online no prescription[/url]
YonCounk · December 13, 2022 at 8:39 am
[url=https://suhagra.life/]suhagra 100mg online india[/url]
SamCounk · December 13, 2022 at 10:07 am
[url=http://tretinoinx.online/]buy retin a from mexico[/url] [url=http://fluconazole.click/]can you buy diflucan without a prescription[/url] [url=http://citalopramcelexa.online/]buy celexa india[/url] [url=http://effexorvenlafaxine.online/]effexor 37 5 mg[/url] [url=http://noroxina.online/]noroxin drug[/url]
RicIsose · December 13, 2022 at 10:35 am
[url=http://silagra.run/]buy silagra online in india[/url] [url=http://anafranil.life/]anafranil 75[/url]
RodneyTab · December 13, 2022 at 10:38 am
[url=https://nexiumtabs.monster/]nexium price[/url]
Michaelemult · December 13, 2022 at 12:11 pm
[url=http://buydisulfiram.monster/]buying antabuse online[/url]
AmyCounk · December 13, 2022 at 3:38 pm
[url=http://dapoxetine.cfd/]buy cheap dapoxetine online[/url]
Michaeldrist · December 13, 2022 at 7:26 pm
[url=https://fluoxetinetab.shop/]fluoxetine brand name south africa[/url]
WilliamWem · December 14, 2022 at 12:32 am
[url=https://buyalbuterol.life/]buy albuterol tablets online[/url] [url=https://vardrugstore.com/]canadian pharmacy sildenafil[/url] [url=https://anafranilclomipramine.shop/]anafranil prices[/url] [url=https://antabusedisulfiram.shop/]antabuse australia price[/url]
MichaelDwego · December 14, 2022 at 2:14 am
[url=https://cleocintab.online/]clindamycin 300[/url]
MiclTek · December 14, 2022 at 2:50 am
[url=https://effexor.click/]buy generic effexor online[/url]
ditropan without prescription · December 14, 2022 at 2:45 pm
prochlorperazine purchase prochlorperazine 5mg canada prochlorperazine for sale
Jameseloro · December 14, 2022 at 3:33 pm
[url=http://dapoxetinetab.online/]dapoxetine 60 price in india[/url] [url=http://anafranilclomipramine.shop/]anafranil pills[/url] [url=http://valtrexvalacyclovir.com/]how to buy valtrex in korea[/url] [url=http://keflexcephalexin.online/]order cephalexin online[/url]
WimCounk · December 14, 2022 at 4:16 pm
[url=http://diflucan.run/]diflucan tablets buy online[/url]
Edgarlor · December 14, 2022 at 6:07 pm
[url=http://fluoxetinetab.shop/]prozac prices[/url]
Jameseloro · December 14, 2022 at 6:59 pm
[url=http://aurogra.cfd/]aurogra tablets[/url] [url=http://anafraniltab.online/]anafranil uk[/url] [url=http://anafranilclomipramine.shop/]anafranil ocd[/url] [url=http://buydexamethasone.life/]order dexamethasone[/url] [url=http://viagraipak.com/]viagra 50 mg tablet online[/url] [url=http://dapoxetinetab.online/]dapoxetine for premature ejaculation[/url]
IvyCounk · December 14, 2022 at 11:51 pm
[url=http://retinoatab.online/]retino 0.025 gel[/url] [url=http://lipitortabs.online/]lipitor 20mg price in uk[/url] [url=http://buylexapro.life/]lexapro 10mg generic[/url] [url=http://viagrawithoutprescription.com/]female viagra pill buy online[/url]
NickCounk · December 15, 2022 at 12:26 am
[url=https://albenza.life/]albendazole coupon[/url]
MiaCounk · December 15, 2022 at 2:09 am
[url=http://buyfluoxetine.monster/]fluoxetine online cheap[/url]
RichardFaply · December 15, 2022 at 6:40 am
[url=http://propranolol.icu/]propranolol buy online[/url] [url=http://anafranilclomipramine.shop/]anafranil 50 mg[/url]
ElwoodGon · December 15, 2022 at 8:57 am
[url=https://vardrugstore.com/]canada drug pharmacy[/url]
MiclTek · December 15, 2022 at 10:00 am
[url=https://finpeciafinasteride.shop/]merck propecia[/url]
JudyCounk · December 15, 2022 at 11:33 am
[url=http://lipitortabs.online/]order lipitor[/url]
MichaelGuabe · December 15, 2022 at 2:59 pm
[url=http://motrintabs.online/]generic motrin 600 mg[/url]
how to purchase zyloprim 100mg · December 15, 2022 at 6:25 pm
ashwagandha caps without a prescription ashwagandha 60caps online ashwagandha 60caps prices
Michaeldrist · December 15, 2022 at 8:05 pm
[url=https://cleocintab.online/]clindamycin where can i buy[/url]
JoeCounk · December 15, 2022 at 8:38 pm
[url=http://buyyasmin.life/]generic yasmin australia[/url] [url=http://seroquelquetiapine.online/]cost of seroquel 300 mg[/url] [url=http://tretinoincream01.com/]buy tretinoin online uk[/url] [url=http://albenza.life/]albendazole buy online india[/url]
TimothyThive · December 15, 2022 at 10:13 pm
[url=http://trustedpharmacyz.quest/]happy family pharmacy[/url]
SamCounk · December 16, 2022 at 1:20 am
[url=https://flagylmetronidazole.shop/]buy flagyl cheap[/url] [url=https://buylipitor.monster/]lipitor 20mg tablets[/url] [url=https://suhagram.monster/]suhagra tablet online[/url] [url=https://priligytabs.online/]dapoxetine 60 mg online purchase in india[/url]
Estebanguall · December 16, 2022 at 1:41 am
[url=http://phenergan.fun/]phenergan on line[/url]
JackCounk · December 16, 2022 at 2:22 am
[url=http://lipitortabs.online/]buy generic lipitor[/url]
DarrylSef · December 16, 2022 at 3:46 am
[url=https://ttpharmacy.shop/]canada pharmacy not requiring prescription[/url] [url=https://viagraipak.com/]viagra/canada[/url] [url=https://kamagrap.online/]kamagra oral jelly uk sales[/url] [url=https://vardrugstore.com/]us pharmacy[/url]
Jameseloro · December 16, 2022 at 8:17 am
[url=http://escitalopram.life/]medication lexapro 10 mg[/url] [url=http://valtrexvalacyclovir.com/]order valtrex online canada[/url] [url=http://nexiumtab.online/]cheap nexium tablets[/url] [url=http://dipyridamole.live/]buy dipyridamole[/url] [url=http://buyciprofloxacin.life/]order ciprofloxacin 500mg[/url] [url=http://buydisulfiram.monster/]buy disulfiram tablets[/url] [url=http://priligy.sbs/]can you buy priligy over the counter[/url]
Charlesaduse · December 16, 2022 at 11:36 am
[url=http://dipyridamole.live/]dipyridamole brand name[/url]
MiaCounk · December 16, 2022 at 1:11 pm
[url=http://lipitor.cfd/]buy lipitor 10 mg[/url]
Michaelemult · December 16, 2022 at 4:22 pm
[url=http://buydisulfiram.monster/]buy disulfiram[/url]
RodneyTab · December 16, 2022 at 5:42 pm
[url=http://aurogra.cfd/]aurogra 100 mg[/url]
MiclTek · December 16, 2022 at 6:20 pm
[url=https://tamoxifen365.com/]nolvadex for women[/url]
IvyCounk · December 16, 2022 at 7:54 pm
[url=http://clindamycintabs.online/]clindamycin otc[/url] [url=http://tamoxifena.monster/]buying tamoxifen online[/url] [url=http://tretinoincream01.com/]retin a gel coupon[/url] [url=http://suhagram.monster/]suhagra 50 mg tablet price[/url] [url=http://dapoxetine.cfd/]priligy price usa[/url] [url=http://finpeciatabs.quest/]finpecia without prescription[/url]
MaryCounk · December 16, 2022 at 9:23 pm
[url=https://buypriligy.life/]dapoxetine tablets 60 mg[/url] [url=https://advair.life/]how much is advair[/url] [url=https://indocin.sbs/]indocin otc[/url]
MaryCounk · December 17, 2022 at 12:03 am
[url=https://albenza.life/]albendazole 400 mg buy online[/url] [url=https://buystromectol.life/]stromectol cream[/url] [url=https://clonidinetabs.quest/]clonidine tab 0.2 mg[/url]
PaulCounk · December 17, 2022 at 4:55 am
[url=https://synthroid.icu/]synthroid 0.5 mg[/url]
AshCounk · December 17, 2022 at 5:39 am
[url=https://furosemidetab.quest/]furosemide 50 mg daily[/url]
Davidhup · December 17, 2022 at 12:52 pm
[url=https://diclofenacvoltaren.online/]voltaren price usa[/url]
EyeCounk · December 17, 2022 at 2:17 pm
[url=https://dapoxetineavana.shop/]buy priligy 30mg[/url] [url=https://dapoxetine.cfd/]best price for extra super avana on the internet[/url] [url=https://sildenafilrx.quest/]buy real viagra online uk[/url] [url=https://finpeciatabs.online/]finasteride where can i buy[/url] [url=https://advair.life/]advair hfa inhaler[/url] [url=https://buyyasmin.life/]buy yasmin without prescription[/url] [url=https://fildenax.online/]fildena 100mg[/url]
MiclTek · December 17, 2022 at 5:52 pm
[url=https://aurogra.cfd/]aurogra 100 online[/url]
DarrylSef · December 17, 2022 at 9:48 pm
[url=https://viagraipak.com/]viagra 50mg online[/url] [url=https://antabusedisulfiram.shop/]disulfiram 500 mg pill[/url] [url=https://viagrastart.com/]female viagra pill where to buy[/url] [url=https://estrace.life/]estrace pills online[/url] [url=https://finasteride247.com/]propecia online nz[/url]
RichardFaply · December 17, 2022 at 10:24 pm
[url=http://escitalopram.life/]lexapro 10 mg tablet[/url] [url=http://viagraipak.com/]where to get sildenafil online[/url] [url=http://anafranilclomipramine.shop/]anafranil depression[/url] [url=http://valtrexvalacyclovir.com/]valtrex otc uk[/url] [url=http://ciallis.shop/]how much is alli[/url] [url=http://buyciprofloxacin.life/]how to get cipro without a prescription[/url]
buspar 10 mg online · December 18, 2022 at 12:25 am
order crestor crestor 20mg medication crestor medication
KiaCounk · December 18, 2022 at 1:02 am
[url=https://levothyroxine.cfd/]synthroid 15mcg[/url]
AlanCounk · December 18, 2022 at 1:42 am
[url=http://indocin.sbs/]indocin coupon[/url] [url=http://flagylmetronidazole.shop/]flagyl 500 mg online pharmacy[/url] [url=http://fildenax.online/]fildena 100 online[/url] [url=http://finpeciatabs.quest/]finasteride buy online[/url] [url=http://strattera365.com/]strattera 25 mg[/url] [url=http://onlinedrugstores.quest/]online pharmacy no prescription needed[/url]
JosephMaict · December 18, 2022 at 4:15 am
[url=http://escitalopram.life/]cipralex generic best price[/url] [url=http://finpeciafinasteride.shop/]propecia for women[/url] [url=http://trustedpharmacyz.quest/]usa pharmacy[/url] [url=http://citalopram.life/]citalopram 4 mg[/url] [url=http://motiliumdomperidone.shop/]motilium over the counter uk[/url]
TedCounk · December 18, 2022 at 5:06 am
[url=https://fluoxetinetabs.online/]how much is generic prozac[/url]
MiclTek · December 18, 2022 at 5:19 am
[url=https://retinoa.life/]retino 0.025[/url]
Curtisvibia · December 18, 2022 at 6:36 am
[url=https://buyalbuterol.life/]cost of ventolin[/url]
JimCounk · December 18, 2022 at 6:36 am
[url=http://finpeciatabs.online/]propecia compare prices[/url]
KimCounk · December 18, 2022 at 7:33 am
[url=http://clonidinetabs.quest/]clonidine 10mg[/url]
JudyCounk · December 18, 2022 at 8:06 am
[url=http://dapoxetine.cfd/]dapoxetine tablets in india[/url]
SueCounk · December 18, 2022 at 10:29 am
[url=http://metformind.online/]4000 mg metformin[/url]
MarvinZem · December 18, 2022 at 12:36 pm
[url=https://buydexamethasone.life/]1mg dexamethasone[/url]
BooCounk · December 18, 2022 at 1:23 pm
[url=https://cymbalta.life/]cymbalta online[/url]
ElwoodGon · December 18, 2022 at 5:47 pm
[url=https://propranolol.icu/]buy propranolol 40mg online[/url]
LisaCounk · December 18, 2022 at 6:19 pm
[url=https://nolvadextabs.online/]average cost of tamoxifen[/url]
Michaeldrist · December 18, 2022 at 6:24 pm
[url=https://aurogra.cfd/]aurogra tablets[/url]
JosephMaict · December 18, 2022 at 6:44 pm
[url=http://paxilparoxetine.shop/]paroxetine hcl 40 mg[/url] [url=http://sildenafilhx.com/]viagra pills online canada[/url] [url=http://trustedpharmacyz.quest/]online pharmacy worldwide shipping[/url] [url=http://clindamycina.shop/]clindamycin brand[/url] [url=http://viviagra.com/]viagra tablets over the counter[/url] [url=http://buydisulfiram.monster/]antabuse order online[/url]
ZakCounk · December 18, 2022 at 8:57 pm
[url=https://buytamoxifen.life/]buying nolvadex uk[/url]
TommyHepsy · December 18, 2022 at 9:40 pm
[url=https://citalopram.life/]citalopram uk price[/url]
DarrylSef · December 18, 2022 at 10:29 pm
[url=https://valtrexvalacyclovir.com/]valtrex 500mg price canada[/url] [url=https://motrintabs.online/]cheap motrin[/url] [url=https://buyciprofloxacin.life/]ciprofloxacin 500mg tablets price in india[/url] [url=https://buydexamethasone.life/]dexamethasone 4 mg tablet online[/url] [url=https://estrace.life/]estrace 5mg[/url] [url=https://paxilparoxetine.shop/]paroxetine generic[/url] [url=https://phenergan.fun/]phenergan generic cost[/url] [url=https://fluconazolediflucan.shop/]diflucan generic over the counter[/url]
MarkCounk · December 18, 2022 at 11:04 pm
[url=https://clonidinetabs.quest/]how to get clonidine[/url]
MiaCounk · December 19, 2022 at 1:16 am
[url=http://tretinoincream01.com/]retin a canadian pharmacy[/url]
UgoCounk · December 19, 2022 at 1:32 am
[url=http://propeciatabs.shop/]generic propecia prescription[/url]
RicIsose · December 19, 2022 at 3:34 am
[url=https://aurogra.cfd/]aurogra[/url] [url=https://neurontintabs.shop/]600 mg gabapentin tablet[/url] [url=https://wellbutrina.online/]wellbutrin 150 mg generic[/url] [url=https://viviagra.com/]viagra usa over the counter[/url] [url=https://allopurinol.sbs/]allopurinol price uk[/url] [url=https://trustedpharmacyz.quest/]online pharmacy pain medicine[/url]
YonCounk · December 19, 2022 at 3:42 am
[url=https://nolvadextabs.online/]tamoxifen australia cost[/url]
cost of avapro · December 19, 2022 at 5:22 am
cymbalta for sale cymbalta pharmacy cymbalta 30 mg without prescription
RodneyTab · December 19, 2022 at 2:35 pm
[url=https://flagyltabs.online/]flagyl drug[/url]
Michaeldrist · December 19, 2022 at 3:42 pm
[url=http://toradol.click/]toradol 15 mg[/url]
AmyCounk · December 19, 2022 at 5:55 pm
[url=http://arimidextab.shop/]arimidex uk[/url]
Davidhup · December 19, 2022 at 8:35 pm
[url=https://zoloft247.com/]cheap zoloft online[/url]
BooCounk · December 19, 2022 at 9:50 pm
[url=https://gabapentinx.online/]neurontin 1200 mg[/url]
MarkCounk · December 20, 2022 at 1:35 am
[url=http://singulair.life/]cost of singulair without insurance[/url]
WimCounk · December 20, 2022 at 4:32 am
[url=http://afinasteride.com/]buy generic propecia uk[/url]
Charlesaduse · December 20, 2022 at 12:18 pm
[url=http://tamoxifen.site/]tamoxifen 20 mg 1mg[/url]
Richardpriefuh · December 20, 2022 at 12:44 pm
pflanzliches Muskelrelaxans
Edgarlor · December 20, 2022 at 1:02 pm
[url=https://abilify.fun/]abilify on line[/url]
MarkCounk · December 20, 2022 at 3:05 pm
[url=http://motrin.fun/]motrin 60 mg[/url]
how to buy antivert · December 20, 2022 at 3:06 pm
macrobid 100mg coupon macrobid 100mg cheap macrobid 50mg price
KimCounk · December 20, 2022 at 3:49 pm
[url=https://buyclindamycin.life/]clindamycin cap 300mg price[/url]
ElwoodGon · December 20, 2022 at 5:23 pm
[url=http://clopidogreltab.online/]plavix 25[/url]
RichardFaply · December 20, 2022 at 10:52 pm
[url=https://cephalexin.sbs/]buy cephalexin online australia[/url] [url=https://buyatarax.monster/]atarax 50 mg tablet[/url] [url=https://happyfamilyrx.quest/]canadianpharmacyworld[/url] [url=https://canadianpharmaceuticalstores.online/]big pharmacy online[/url] [url=https://fildenatab.online/]where to buy fildena[/url]
EvaCounk · December 21, 2022 at 12:24 am
[url=https://tadacip.run/]tadacip online canada[/url]
TeoCounk · December 21, 2022 at 1:39 am
[url=https://tamoxifentabs.shop/]where can i buy nolvadex online[/url]
NickCounk · December 21, 2022 at 3:33 am
[url=https://anafraniltabs.online/]anafranil prescription[/url]
JaneCounk · December 21, 2022 at 5:54 am
[url=https://happyfamilyrx.shop/]which online pharmacy is the best[/url]
AnnaCounk · December 21, 2022 at 7:45 am
[url=https://tretinointab.com/]tretinoin 05 gel india[/url]
allopurinol tablet · December 21, 2022 at 11:50 am
indocin australia indocin 50mg uk indocin 75mg over the counter
WilliamWem · December 21, 2022 at 2:11 pm
[url=http://flagyltabs.online/]500 mg flagyl[/url] [url=http://robaxin.sbs/]can you buy robaxin over the counter[/url] [url=http://tamoxifen.site/]tamoxifen for sale[/url]
Matteoempixelm · December 21, 2022 at 10:31 pm
arthrite du cou
Estebanguall · December 21, 2022 at 10:40 pm
[url=https://metforminx.online/]metformin otc[/url]
MichaelDwego · December 22, 2022 at 2:18 am
[url=http://atomoxetine.life/]strattera 80 mg capsule[/url]
DenCounk · December 22, 2022 at 2:19 am
[url=http://amitriptylinetab.shop/]elavil 500 mg[/url]
RodneyTab · December 22, 2022 at 4:31 am
[url=https://noroxin.life/]noroxin[/url]
TimothyThive · December 22, 2022 at 7:07 am
[url=http://deltasonetabs.online/]prednisone 5mg over the counter[/url]
JoeCounk · December 22, 2022 at 10:51 am
[url=https://levitra247.com/]levitra buy online india[/url] [url=https://diclofenac.sbs/]diclofenac 25 mg otc[/url] [url=https://dapoxetinetab.monster/]can i buy dapoxetine over the counter[/url] [url=https://dexamethasone24.com/]dexamethasone 16 mg[/url] [url=https://tadacip.run/]tadacip online[/url] [url=https://celexatabs.online/]how much is celexa[/url] [url=https://buybupropion.life/]bupropion mexico[/url]
MichaelGuabe · December 22, 2022 at 4:04 pm
[url=http://medrol.fun/]cheapest medrol[/url]
ElwoodGon · December 22, 2022 at 9:15 pm
[url=http://baclofen.click/]baclofen 5 mg price[/url]
MarvinZem · December 22, 2022 at 10:40 pm
[url=https://atomoxetine.life/]generic strattera coupon[/url]
Samuelraisk · December 22, 2022 at 11:58 pm
[url=https://arimidex.life/]arimidex 0.25 mg[/url]
JackCounk · December 23, 2022 at 12:27 am
[url=https://levitra247.com/]levitra online south africa[/url]
ElwoodGon · December 23, 2022 at 12:27 am
[url=http://clomidx.com/]clomid generic cost[/url]
WilliamWem · December 23, 2022 at 6:38 am
[url=http://flagyltabs.online/]flagyl pills[/url] [url=http://noroxin.life/]noroxin online[/url] [url=http://finpecia.run/]propecia 1mg[/url] [url=http://buyfildena.monster/]fildena online india[/url]
ElwoodGon · December 23, 2022 at 7:13 am
[url=http://provigil.fun/]how can i get provigil[/url]
Jameseloro · December 23, 2022 at 10:01 am
[url=https://cephalexin.sbs/]cephalexin 750 mg cost[/url] [url=https://buyventolin.life/]where can i order ventolin without a prescription[/url] [url=https://ventolinz.online/]albuterol online order[/url] [url=https://kamagrap.shop/]kamagra 100mg oral jelly for sale[/url] [url=https://avanadapoxetine.shop/]dapoxetine for sale[/url] [url=https://lanoxin.monster/]lanoxin discount[/url] [url=https://buyatarax.monster/]atarax 5mg[/url] [url=https://robaxin.sbs/]can you buy robaxin over the counter in canada[/url]
Curtisvibia · December 23, 2022 at 11:03 am
[url=http://worldpharmacyx.quest/]canadapharmacyonline com[/url]
DarrylSef · December 23, 2022 at 12:52 pm
[url=http://robaxin.sbs/]robaxin over the counter usa[/url] [url=http://paxilparoxetine.online/]paroxetine coupon[/url] [url=http://finpecia.run/]how to get propecia online[/url]
Samuelraisk · December 23, 2022 at 2:32 pm
[url=https://fildenatab.online/]fildena 150[/url]
indocin cheap · December 23, 2022 at 3:33 pm
toprol pharmacy toprol 100 mg without prescription toprol 100mg canada
JudyCounk · December 24, 2022 at 1:03 am
[url=http://anafraniltabs.online/]anafranil 50 mg[/url]
TeoCounk · December 24, 2022 at 1:51 am
[url=https://ttpharmacy.store/]reputable indian online pharmacy[/url]
Edgarlor · December 24, 2022 at 2:27 am
[url=https://canadianpharm.online/]legal canadian pharmacy online[/url]
Samuelraisk · December 24, 2022 at 5:43 am
[url=https://abilify.life/]abilify 1mg tablet[/url]
JimCounk · December 24, 2022 at 9:55 am
[url=https://clopidogrelplavix.online/]price of plavix 75 mg in india[/url]
JaneCounk · December 24, 2022 at 12:22 pm
[url=https://dapoxetinetab.monster/]priligy 30[/url]
MaryCounk · December 24, 2022 at 1:23 pm
[url=http://onlinevpharmacy.online/]tops pharmacy[/url] [url=http://tizanidine.life/]tizanidine 2mg capsules[/url]
RobertFoold · December 24, 2022 at 1:47 pm
[url=http://adiflucan.online/]buy diflucan online uk[/url]
Michaelemult · December 24, 2022 at 4:18 pm
[url=https://zoloft247.com/]how to get zoloft prescription online[/url]
ElwoodGon · December 24, 2022 at 7:12 pm
[url=http://clopidogreltab.online/]clopidogrel 150 mg daily[/url]
AlanCounk · December 24, 2022 at 11:15 pm
[url=http://albuteroltabs.com/]can you buy ventolin over the counter in canada[/url] [url=http://atarax.life/]atarax 25 mg tablets[/url] [url=http://singulair.life/]where to buy singulair[/url]
RicIsose · December 25, 2022 at 12:33 am
[url=https://canadianpharm.online/]mail order pharmacy india[/url] [url=https://singulaira.quest/]singulair 10 mg over the counter[/url] [url=https://advairtab.monster/]price of advair without insurance[/url] [url=https://cephalexin.sbs/]average price for keflex[/url]
Curtisvibia · December 25, 2022 at 12:38 am
[url=http://happyfamilyrx.quest/]best rogue online pharmacy[/url]
AshCounk · December 25, 2022 at 2:45 am
[url=https://seroquelquetiapine.shop/]seroquel 500[/url]
ZakCounk · December 25, 2022 at 2:47 am
[url=https://tretinointab.com/]retin a cream purchase[/url]
lopid 300 mg australia · December 25, 2022 at 3:29 am
lasix 40 mg online pharmacy cheap lasix lasix 100 mg united states
LisaCounk · December 25, 2022 at 3:54 am
[url=http://albendazol.online/]albendazole tablets canada[/url]
DarrylSef · December 25, 2022 at 5:04 am
[url=http://abilify.life/]abilify without a prescription[/url] [url=http://ventolinz.online/]albuterol canada pharmacy[/url] [url=http://stromectoltab.online/]stromectol 3 mg[/url]
MiclTek · December 25, 2022 at 11:11 am
[url=http://buynoroxin.monster/]buy noroxin[/url]
ElwoodGon · December 25, 2022 at 2:37 pm
[url=http://amitriptylinetabs.online/]purchase elavil without a prescription[/url]
ElwoodGon · December 25, 2022 at 4:50 pm
[url=http://happyfamilypharm.online/]best online pharmacy[/url]
ElwoodGon · December 25, 2022 at 7:55 pm
[url=http://vardenafil.wiki/]vardenafil price in india[/url]
Estebanguall · December 25, 2022 at 8:05 pm
[url=https://tamoxifen.site/]nolvadex tabs 20mg[/url]
cost of remeron 15 mg · December 26, 2022 at 12:59 am
flonase nasal spray without prescription flonase nasal spray tablets flonase nasal spray 50 mcg medication
Gavinempixelm · December 27, 2022 at 2:19 am
perte de poids billy gardell
strattera 18 mg purchase · December 27, 2022 at 6:50 am
aldactone without prescription aldactone pharmacy aldactone tablets
atarax 25mg tablet · December 27, 2022 at 11:45 am
allegra 120mg nz allegra coupon allegra 120mg usa
elavil australia · December 28, 2022 at 2:52 pm
fexofenadine tablets fexofenadine 180 mg generic fexofenadine generic
zyvox purchase · December 29, 2022 at 12:12 pm
order divalproex cheapest divalproex divalproex canada
Ibrahimempixelm · December 29, 2022 at 9:33 pm
cancro putin
atarax 10mg canada · December 30, 2022 at 6:35 am
compazine 5mg generic compazine pharmacy compazine 5mg online pharmacy
buy differin · December 31, 2022 at 9:58 pm
pioglitazone without a doctor prescription pioglitazone no prescription pioglitazone usa
how to purchase differin 15g · January 1, 2023 at 7:28 pm
indocin online indocin 75mg online pharmacy indocin 75mg united states
macrobid 50mg uk · January 2, 2023 at 5:32 pm
imuran 25 mg nz cheapest imuran 25 mg imuran 50 mg over the counter
Gregoryempixelm · January 2, 2023 at 6:26 pm
collirio upneeq
Emmettempixelm · January 10, 2023 at 7:53 pm
ce qui cause la perte de cheveux chez les femmes
Dominickempixelm · January 12, 2023 at 1:11 am
jengibre para el mareo por movimiento
protonix generic · January 12, 2023 at 11:56 pm
cozaar coupon cozaar 50 mg cheap how to purchase cozaar 100mg
Caydenempixelm · January 13, 2023 at 4:00 am
controllo delle nascite online
Davidelani · January 14, 2023 at 6:22 am
That means you’ll get the idea some new features and suffer with access to additional channels where you can forward movement visibility, without having to put to rights import of some ornate, guide migration process. https://googlec5.com
how to purchase compazine · January 15, 2023 at 8:17 am
how to purchase luvox 100 mg luvox 100 mg online luvox 100 mg pills
garcinia cambogia caps canada · January 19, 2023 at 4:49 am
zanaflex 4 mg coupon zanaflex 2 mg over the counter zanaflex tablet
allopurinol prices · January 21, 2023 at 3:50 pm
donepezil prices donepezil united states where to buy donepezil
how to purchase furosemide 40mg · January 24, 2023 at 11:24 pm
depakote 125 mg online pharmacy depakote 125 mg for sale depakote prices
meclizine over the counter · January 25, 2023 at 10:00 pm
cheapest lamisil 250 mg lamisil 250 mg cost lamisil pills
elavil 25mg without prescription · January 27, 2023 at 3:33 am
olmesartan cheap olmesartan 20mg no prescription olmesartan pills
amoxicillin for sale · January 28, 2023 at 3:45 am
depakote online pharmacy depakote for sale depakote 125 mg uk
Abelempixelm · January 28, 2023 at 5:12 pm
зѕЋе®№её«гЃ®гѓг‚ўгѓЎг‚¤г‚ЇгЃЁг‚№г‚гѓіг‚±г‚ўгЃЄгЃ©
loperamide otc · January 29, 2023 at 7:48 pm
how to purchase avapro 300mg avapro 300mg tablet avapro prices
Kaysonempixelm · January 31, 2023 at 1:49 am
kaliumsparande diuretika
zyloprim nz · January 31, 2023 at 3:55 am
order carvedilol carvedilol 12.5mg uk carvedilol without prescription
hyzaar prices · February 1, 2023 at 7:31 am
seroquel 300mg no prescription where to buy seroquel 25 mg seroquel no prescription
Aliempixelm · February 1, 2023 at 12:58 pm
胃の健康のレビュー
qkoidyum · February 3, 2023 at 7:16 am
striplife.ru
jdisbeya · February 3, 2023 at 10:41 am
striplife.ru
divalproex 125mg generic · February 3, 2023 at 11:26 am
catapres 100mcg pills catapres australia catapres 100 mcg without a doctor prescription
lzmrvwxj · February 3, 2023 at 1:33 pm
striplife.ru
qtvfvxgj · February 3, 2023 at 5:24 pm
striplife.ru
Brantleyempixelm · February 4, 2023 at 1:16 am
solallergi
carvedilol 12.5mg australia · February 4, 2023 at 4:01 pm
risperdal tablets risperdal 2mg cheap risperdal pharmacy
zkdiqaky · February 5, 2023 at 1:48 am
853983004
ofgzoqxh · February 5, 2023 at 3:18 am
558260895
nufvfuhh · February 5, 2023 at 4:20 am
728802192
wyygzqom · February 5, 2023 at 7:53 am
lastduel.ru
Franklinempixelm · February 5, 2023 at 2:36 pm
voitko yliannostella masennuslääkkeitä masennuslääkkeet
how to purchase spiriva · February 6, 2023 at 5:26 am
cheap remeron 15 mg remeron 30mg over the counter remeron without a prescription
Eliempixelm · February 7, 2023 at 2:23 am
antibakteriell tvål för piercingar
Edwinempixelm · February 8, 2023 at 3:19 pm
streДЌovГЎnГ pro Гєlevu od bolesti dolnГ ДЌГЎsti zad
Declanempixelm · February 10, 2023 at 2:17 am
beste voedingsmiddelen voor gewichtsverlies
xzvmfgec · February 10, 2023 at 11:06 pm
mgfmail.ru
miyzprhd · February 11, 2023 at 12:01 am
mgfmail.ru
vantin over the counter · February 11, 2023 at 12:26 am
cost of cephalexin 500mg cephalexin 500 mg no prescription cephalexin 500mg usa
rhtucuyw · February 11, 2023 at 12:56 am
mgfmail.ru
egtlwyov · February 11, 2023 at 1:51 am
mgfmail.ru
lmcurpof · February 11, 2023 at 2:45 am
mgfmail.ru
bzinlwvt · February 11, 2023 at 3:41 am
mgfmail.ru
mjxjkcsj · February 11, 2023 at 4:36 am
mgfmail.ru
iwdrgmub · February 11, 2023 at 5:31 am
mgfmail.ru
ydspkyjx · February 11, 2023 at 6:26 am
mgfmail.ru
kgnjilsj · February 11, 2023 at 7:21 am
mgfmail.ru
fasumvwy · February 11, 2023 at 9:10 am
mgfmail.ru
eioxrkim · February 11, 2023 at 10:06 am
mgfmail.ru
igijvybh · February 11, 2023 at 11:01 am
mgfmail.ru
lxiltkvh · February 11, 2023 at 12:00 pm
mgfmail.ru
lsxtgdwc · February 11, 2023 at 12:58 pm
mgfmail.ru
uyioukbo · February 11, 2023 at 1:52 pm
mgfmail.ru
likxtwse · February 11, 2023 at 2:45 pm
mgfmail.ru
wwkdwzga · February 11, 2023 at 3:39 pm
mgfmail.ru
sgxhgwzm · February 11, 2023 at 4:34 pm
mgfmail.ru
rkqcejtp · February 11, 2023 at 5:32 pm
mgfmail.ru
ckwgipaf · February 11, 2023 at 6:29 pm
mgfmail.ru
dmhgbyui · February 11, 2023 at 7:22 pm
mgfmail.ru
xoagpjpo · February 11, 2023 at 8:16 pm
mgfmail.ru
eamvxhfg · February 11, 2023 at 10:16 pm
artist-bio.ru
coveznfj · February 11, 2023 at 11:13 pm
artist-bio.ru
ttwhqvkx · February 12, 2023 at 12:53 am
artist-bio.ru
kxjwadiz · February 12, 2023 at 1:50 am
artist-bio.ru
ljzuhwbn · February 12, 2023 at 2:44 am
artist-bio.ru
buy zyvox · February 12, 2023 at 7:06 pm
how to buy ashwagandha 60caps ashwagandha 60caps canada ashwagandha caps uk
wskqfkzc · February 12, 2023 at 9:25 pm
artist-bio.ru
huinlsww · February 12, 2023 at 10:50 pm
artist-bio.ru
sqigmkrc · February 13, 2023 at 12:02 am
artist-bio.ru
phxlpmyn · February 13, 2023 at 7:38 am
artist-bio.ru
xkvyduer · February 13, 2023 at 8:31 am
artist-bio.ru
tubehyig · February 13, 2023 at 9:30 am
artist-bio.ru
Israelempixelm · February 13, 2023 at 10:18 pm
cukrzyca texas i endokrynologia
uydpukwl · February 14, 2023 at 12:09 am
pzbegiye · February 14, 2023 at 2:01 am
hfaefbbv · February 14, 2023 at 5:38 am
kezhintq · February 14, 2023 at 6:36 am
buy irbesartan · February 14, 2023 at 7:46 am
crestor uk crestor 10 mg medication crestor nz
bnlqnwmb · February 14, 2023 at 5:58 pm
mviczkza · February 14, 2023 at 7:18 pm
fbsenzun · February 14, 2023 at 8:20 pm
knjnrebn · February 14, 2023 at 10:37 pm
skujljtc · February 14, 2023 at 11:54 pm
iuuyqttz · February 15, 2023 at 12:56 am
tyhbnfyh · February 15, 2023 at 10:05 am
clozaril cost · February 15, 2023 at 10:52 am
tamoxifen 10mg uk tamoxifen 10 mg canada buy tamoxifen
Cairoempixelm · February 15, 2023 at 10:54 am
soma muskelafslappende
ydtucvlf · February 15, 2023 at 11:13 am
csopzwuc · February 15, 2023 at 12:15 pm
hqipcvjn · February 15, 2023 at 2:23 pm
xahansbq · February 15, 2023 at 3:39 pm
vwbzymhr · February 15, 2023 at 5:07 pm
isjrikex · February 16, 2023 at 2:09 pm
yhsoptrl · February 16, 2023 at 3:24 pm
klwoysqr · February 16, 2023 at 4:40 pm
wronfeor · February 16, 2023 at 8:40 pm
Крутейший сериал. Одни из нас. Подборка лучших сериалов.
kyzhhfop · February 16, 2023 at 10:26 pm
Сериал который бьет все рекорды. Одни из нас. Подборка лучших сериалов.
metoclopramide 10 mg otc · February 17, 2023 at 1:02 am
prochlorperazine online prochlorperazine for sale prochlorperazine without a doctor prescription
kcisqvzy · February 17, 2023 at 1:11 am
Крутой сериал. Одни из нас. Одни из нас смотреть онлайн все сезоны сериала.
tohvhkjg · February 17, 2023 at 3:56 am
Лучший сериал года. Одни из нас. Подборка лучших сериалов.
wrzzmxdy · February 17, 2023 at 5:45 am
Сериал который бьет все рекорды. Одни из нас. Отзывы о Сериал “Одни из нас” (2023)
qpmbcdgj · February 17, 2023 at 6:47 am
Новый сериал. Одни из нас. Подборка лучших сериалов.
furosemide 100mg pills · February 18, 2023 at 11:28 am
cost of clotrimazole order clotrimazole 10g cost of clotrimazole
wugnxjlw · February 18, 2023 at 12:14 pm
Крутейший сериал. Одни из нас. Первые впечатления от «Одни из нас»: каким получился.
gwbampum · February 18, 2023 at 1:09 pm
Сериал который бьет все рекорды. Одни из нас. Отзывы о Сериал “Одни из нас” (2023)
ngctokcq · February 18, 2023 at 2:04 pm
Крутой сериал. Одни из нас. Первые впечатления от «Одни из нас»: каким получился.
Westonempixelm · February 18, 2023 at 2:51 pm
Gastro-Gesundheit Kirkland
tctwbxpg · February 18, 2023 at 7:34 pm
Новый сериал. Одни из нас. Отзывы о Сериал “Одни из нас” (2023)
wisbsrrs · February 18, 2023 at 8:28 pm
Новинки сериалов 2023 года. Одни из нас. Первые впечатления от «Одни из нас»: каким получился.
hqybvafo · February 18, 2023 at 9:23 pm
Новинки сериалов 2023 года. Одни из нас. Одни из нас (сериал, 2023, 2 сезона).
lwlpghup · February 18, 2023 at 10:16 pm
Новинки сериалов 2023 года. Одни из нас. Первые впечатления от «Одни из нас»: каким получился.
xyrgwlbw · February 18, 2023 at 11:28 pm
zasqffxk · February 19, 2023 at 12:53 am
dvtnaohi · February 19, 2023 at 2:09 am
hyxaiqkj · February 19, 2023 at 3:42 am
ijcbxhhh · February 19, 2023 at 5:05 am
uruljddd · February 19, 2023 at 6:33 am
gniqjzhx · February 19, 2023 at 7:59 am
gwhgbvoh · February 19, 2023 at 9:29 am
njcwzcna · February 19, 2023 at 10:56 am
nyohgtpa · February 19, 2023 at 12:26 pm
wyokuvwx · February 19, 2023 at 1:52 pm
beajqqoz · February 19, 2023 at 3:30 pm
rsyitmah · February 19, 2023 at 5:11 pm
zocor 40 mg nz · February 19, 2023 at 6:38 pm
azathioprine pharmacy azathioprine 25mg united kingdom azathioprine purchase
icxgorvj · February 19, 2023 at 7:43 pm
where can i buy mestinon 60 mg · February 20, 2023 at 11:24 pm
arava tablet arava 10mg no prescription arava price
Jaxsonempixelm · February 22, 2023 at 12:03 am
collyre Г la natamycine
rjitrhzq · February 22, 2023 at 12:05 am
kimikiss.ru
bmcatsrb · February 22, 2023 at 1:23 am
kimikiss.ru
cdesxcbf · February 22, 2023 at 3:05 am
kimikiss.ru
qgfyncja · February 22, 2023 at 4:30 am
kimikiss.ru
euqkvzsh · February 22, 2023 at 5:58 am
kimikiss.ru
jmwjruzx · February 22, 2023 at 7:21 am
kimikiss.ru
kpvjxbyd · February 22, 2023 at 6:02 pm
kimikiss.ru
fdahpcdp · February 22, 2023 at 8:44 pm
kimikiss.ru
cost of remeron 15 mg · February 22, 2023 at 10:37 pm
augmentin 875/125 mg no prescription augmentin 750/250mg no prescription cheapest augmentin
lhhidrfk · February 22, 2023 at 11:07 pm
kimikiss.ru
motrin 400 mg united states · February 24, 2023 at 7:02 am
compazine 5mg without prescription compazine without a doctor prescription compazine 5mg coupon
rosuvastatin 20 mg cost · February 25, 2023 at 2:21 pm
cephalexin 500 mg coupon cost of cephalexin 500 mg where can i buy cephalexin 500 mg
Austinempixelm · February 25, 2023 at 5:56 pm
postpartum hormoner
where can i buy metoprolol · February 27, 2023 at 12:57 am
metoclopramide united states metoclopramide online pharmacy order metoclopramide
Odinempixelm · February 27, 2023 at 6:19 pm
inibitore della ricaptazione della norepinefrina antidepressivi
DarrylSef · March 1, 2023 at 6:52 am
[url=https://levaquin.fun/]levaquin pack[/url]
SamCounk · March 1, 2023 at 12:45 pm
[url=https://promethazine.life/]phenergan 10mg over the counter[/url]
MiclTek · March 1, 2023 at 2:28 pm
[url=https://tetracycline.gives/]terramycin antibiotic ophthalmic ointment[/url]
JimCounk · March 1, 2023 at 2:43 pm
[url=http://domperidone.life/]motilium australia[/url]
wellbutrin pills · March 1, 2023 at 3:17 pm
how to purchase irbesartan irbesartan over the counter irbesartan nz
DenCounk · March 1, 2023 at 7:50 pm
[url=https://paxil.foundation/]paroxetine buy no prescription[/url]
TimothyThive · March 1, 2023 at 8:22 pm
[url=http://silagra.sbs/]buy silagra online uk[/url]
DarrylSef · March 2, 2023 at 7:29 am
[url=https://sumycin.charity/]sumycin over the counter[/url]
MichaelGuabe · March 2, 2023 at 9:12 am
[url=https://paxil.foundation/]paroxetine price[/url]
NickCounk · March 2, 2023 at 11:11 am
[url=https://levothyroxine.life/]where can you buy synthroid[/url]
MichaelDwego · March 2, 2023 at 10:07 pm
[url=http://triamterene.life/]triamterene hctz 75 50[/url]
pyridium united kingdom · March 2, 2023 at 11:25 pm
order zyloprim 100mg zyloprim 100 mg australia zyloprim 100mg otc
Curtisvibia · March 2, 2023 at 11:59 pm
[url=https://albuterol.gives/]buy albuterol tablets online uk[/url]
EvaCounk · March 3, 2023 at 12:34 am
[url=http://zestoretic.life/]zestoretic tabs[/url]
RobertFoold · March 3, 2023 at 4:46 pm
[url=http://sumycin.charity/]tetracycline 500mg[/url]
RicIsose · March 3, 2023 at 7:51 pm
[url=http://canadianpharmacy.men/]best european online pharmacy[/url]
RicIsose · March 4, 2023 at 3:01 am
[url=https://doxycycline.wiki/]doxycycline generic brand[/url]
Michaeldrist · March 4, 2023 at 9:05 am
[url=https://silagra.live/]buy silagra 100 mg[/url]
SueCounk · March 4, 2023 at 10:55 am
[url=http://disulfiramtabs.com/]antabuse price australia[/url]
ElwoodGon · March 4, 2023 at 10:56 am
[url=https://silagra.sbs/]silagra 50 mg india[/url]
DarrylSef · March 5, 2023 at 2:19 am
[url=http://buydiclofenac.foundation/]diclofenac 75[/url]
TommyHepsy · March 5, 2023 at 6:13 am
[url=http://chloroquine.cyou/]buy aralen uk[/url]
LloydStupt · March 5, 2023 at 12:15 pm
https://www.cafemumu777.ru/
EyeCounk · March 5, 2023 at 12:41 pm
[url=http://tamoxifentabs.com/]nolvadex to buy[/url]
Angeloempixelm · March 5, 2023 at 5:52 pm
quГ© es la enfermedad cardiovascular
Charlesaduse · March 5, 2023 at 7:30 pm
[url=https://lyricatabs.com/]lyrica tablets for sale[/url]
KiaCounk · March 5, 2023 at 7:58 pm
[url=https://nolvadextabs.monster/]tamoxifen over the counter[/url]
EyeCounk · March 5, 2023 at 9:49 pm
[url=http://buyestrace.life/]estrace tablets coupon[/url]
carvedilol otc · March 6, 2023 at 12:11 am
where can i buy ampicillin 500 mg how to buy ampicillin ampicillin 500 mg otc
Davidhup · March 6, 2023 at 11:45 pm
[url=http://indocin.directory/]indocin 50 mg cap[/url]
macrobid generic · March 7, 2023 at 7:02 am
calcium carbonate 500mg united states calcium carbonate 500mg uk calcium carbonate 500 mg united states
Santinoempixelm · March 7, 2023 at 12:33 pm
antibakteerinen tatuointisaippua
JasonCounk · March 7, 2023 at 2:57 pm
[url=https://strattera.pics/]strattera 18 mg coupon[/url]
WilliamWem · March 7, 2023 at 10:51 pm
[url=http://wellbutrin.lol/]bupropion 300 mg generic[/url]
Curtisvibia · March 8, 2023 at 7:21 pm
[url=https://chloroquine.cyou/]generic chloroquine phosphate[/url]
escitalopram 5mg tablet · March 8, 2023 at 8:24 pm
how to purchase ditropan 2,5mg ditropan purchase ditropan without a doctor prescription
ElwoodGon · March 9, 2023 at 6:27 am
[url=http://cleocinrem.com/]clindamycin prices[/url]
Davidhup · March 9, 2023 at 6:29 am
[url=http://strattera.pics/]atomoxetine cost[/url]
CraigTed · March 9, 2023 at 2:39 pm
канальная сплит система внутренний блок
TimothyThive · March 10, 2023 at 4:04 am
[url=http://buyestrace.monster/]estrace 01[/url]
ZakCounk · March 10, 2023 at 4:08 am
[url=http://ciprofloxacin.lol/]cipro cheapest price[/url]
DarrylSef · March 10, 2023 at 2:17 pm
[url=http://medroltab.online/]medrol cost in uk[/url]
LloydErrom · March 10, 2023 at 4:33 pm
newmexicodesign.net
PaulCounk · March 11, 2023 at 4:52 am
[url=http://benicar.lol/]benicar buy online[/url]
MaryCounk · March 11, 2023 at 8:16 am
[url=https://celexa.digital/]citalopram 10mg cost[/url]
JimCounk · March 11, 2023 at 11:16 am
[url=http://colchicine.wiki/]colchicine 1 mg price[/url]
JasonCounk · March 11, 2023 at 2:44 pm
[url=http://pharmacyonline.pics/]online pharmacy quick delivery[/url]
PaulCounk · March 11, 2023 at 3:07 pm
[url=http://colchicine.wtf/]colchicine 0.6 mg price india[/url]
Davidhup · March 11, 2023 at 4:15 pm
[url=http://colchicine.wtf/]colchicine 6 mg[/url]
Johnnycip · March 11, 2023 at 4:29 pm
apartusa365.com
Tylergen · March 11, 2023 at 5:48 pm
cottageindesign.com
JackCounk · March 11, 2023 at 9:33 pm
[url=https://avanatabs.online/]dapoxetine tablet price[/url]
MichaelGuabe · March 11, 2023 at 10:58 pm
[url=http://robaxin.directory/]robaxin 1000 mg price[/url]
DavisMug · March 12, 2023 at 7:52 am
[url=https://xenical.lol/]xenical price canada[/url]
KimCounk · March 12, 2023 at 1:30 pm
[url=https://neurontin.lol/]neurontin canada online[/url]
JustinSon · March 13, 2023 at 4:35 am
jaycitynews.com
AshCounk · March 13, 2023 at 8:01 am
[url=https://diclofenactab.online/]diclofenac gel canada[/url]
EvaCounk · March 13, 2023 at 8:24 am
[url=http://motrina.gives/]1000 mg motrin[/url]
KiaCounk · March 13, 2023 at 8:39 am
[url=http://medrolla.online/]medrol 4mg price in usa[/url]
JamesSerry · March 13, 2023 at 5:31 pm
mosesolmos.com
NathanJex · March 13, 2023 at 6:39 pm
thecolumbianews.net
AbrahamBribe · March 14, 2023 at 5:08 am
219news.com
SamuelCib · March 14, 2023 at 5:20 am
madeintexas.net
ElwoodGon · March 14, 2023 at 5:39 am
[url=http://ivermectinop.monster/]stromectol 3 mg tablet price[/url]
garcinia cambogia caps generic · March 14, 2023 at 1:43 pm
buspar 5 mg uk where can i buy buspar buspar 10 mg tablets
Ronaldalaft · March 14, 2023 at 6:25 pm
californianetdaily.com
CraigTed · March 14, 2023 at 6:43 pm
кондиционер настенный 18
Silasempixelm · March 14, 2023 at 9:58 pm
alergia Г carne picada de carrapato
Antoniodyeta · March 15, 2023 at 2:53 am
chinaone.net
Lesleygoxia · March 15, 2023 at 5:47 am
360o.info
LesterWoope · March 15, 2023 at 5:53 am
news24time.net
RichardCoult · March 15, 2023 at 8:23 am
Virtual Stripper is a comely show app payment your desktop and motorized phone and a community website that features a hefty company of fair, high excellence HD and VR correct worth accepted strippers who live in the porn earnestness and fall ill nude on your computer desktop, and so good mobile app. virtual strippers
Beget your own uncover sorority from the comfort of your home, all you difficulty to ledger and enjoy. The community of virtual strippers can occasion your daylight splendid and enjoyable
RichardUndog · March 15, 2023 at 5:11 pm
morson.org
ScottTib · March 15, 2023 at 6:02 pm
oknews360.com
crestor 5 mg canada · March 15, 2023 at 7:49 pm
clotrimazole for sale where to buy clotrimazole 10g cost of clotrimazole
Jimmythoft · March 16, 2023 at 1:54 am
holidaynewsletters.com
JoshuaDen · March 16, 2023 at 4:35 am
canada-welcome.com
StevenDiupt · March 16, 2023 at 5:04 am
Virtual Girls – Cute stripper Maid , lone girl, HD Explicit Mademoiselle Wallpaper in compensation Phone, android, pc. Looking quest of untrodden wallpaper with great unshakability of beautiful bared girls? Here are the best loose HD wallpaper sites for declaration a fresh desktop background. Virtual stripper in stoned supremacy and in 4K
stripper screensaver
Stevenit · March 16, 2023 at 1:22 pm
goturkishnews.com
JamesvOn · March 16, 2023 at 2:18 pm
women18.com
JamesDix · March 16, 2023 at 6:10 pm
workingholiday365.com
isosorbide without a prescription · March 17, 2023 at 12:45 am
buy finasteride 5mg finasteride 5mg without prescription finasteride 5mg without a prescription
Robertdof · March 17, 2023 at 3:45 am
It is anybody of the most commonly used understood girlfriend apps for Android and iOS users. My Effective Girlfriend FREE
virtual stripper
Edwingak · March 17, 2023 at 4:06 am
dominicanrental.com
cheap mestinon · March 18, 2023 at 4:22 am
celecoxib no prescription celecoxib 100 mg cost celecoxib online
WilburnVed · March 18, 2023 at 8:53 am
angliannews.com
Robertfop · March 18, 2023 at 10:43 am
The study of sites on the internet can be carried out automatically tokyo365web.com, the information is available to each user.
JohnnieGem · March 18, 2023 at 8:01 pm
chinanews777.com
FelixDweva · March 19, 2023 at 4:22 am
Seller rating 365newss.net and the impact of comments on him.
where can i buy metoprolol 100 mg · March 19, 2023 at 6:42 am
where can i buy zyloprim 300mg zyloprim otc cheap zyloprim 100 mg
JasonFup · March 19, 2023 at 7:45 am
construction-rent.com
Benniethath · March 19, 2023 at 9:30 am
Access to these services is available on the official repairdesign24.com that provide services for placing portals on the internet.
Terrydedia · March 19, 2023 at 11:02 am
detroitapartment.net
HectorArous · March 19, 2023 at 12:38 pm
If we are talking about companies dominicandesign.net, the rating will be calculated after the third comment from users.
Brianlef · March 19, 2023 at 5:41 pm
leeds-welcome.com
RobertBer · March 20, 2023 at 2:46 am
Of course, a high rating will birminghamnews24.com contribute to the effective development of your business.
buy mestinon · March 20, 2023 at 11:09 am
reglan united states reglan cheap reglan 10 mg price
RichardMiz · March 20, 2023 at 4:56 pm
The store offers a wide range of products belfastinvest.net in different categories.
Stanleyspirl · March 20, 2023 at 7:16 pm
gocanadanews.com
Justinnar · March 21, 2023 at 1:35 am
dallasrentapart.com
BrandondichE · March 21, 2023 at 3:45 am
californiarent24.com
Robertjeork · March 21, 2023 at 4:02 am
Sellers who are engaged in the development of private business texasnews365.com receive a rating after the first written review.
Donaldmes · March 21, 2023 at 8:00 am
Hot virtual naked stripper girls dance right on your desktop
Virtual Stripper
protonix 40mg online · March 21, 2023 at 3:48 pm
risperdal 4mg usa risperdal 4 mg medication risperdal united states
Richardcaf · March 21, 2023 at 6:44 pm
event-miami24.com
Davidfub · March 21, 2023 at 7:33 pm
cyprus-welcome.com
JoshuaSausa · March 22, 2023 at 4:18 am
In other categories, people repaircanada.net will not be able to leave their feedback when it comes to a professional seller. It is important to remember these moments so as not to encounter difficulties in the future.
AndresAlise · March 22, 2023 at 4:18 am
How to train dog How To Train Your Dog To Ignore Other Dogs Watch on Youtube
TimothyAlula · March 22, 2023 at 4:27 am
domstroi.info
CraigTed · March 22, 2023 at 5:53 am
rns55hn
JesusThexy · March 22, 2023 at 12:14 pm
A large number of buyers financenewsasia.com will turn to your offers, people will be more willing to order goods and services.
JeffreyRof · March 22, 2023 at 1:51 pm
plitki.com
Anthonyveida · March 22, 2023 at 3:58 pm
newssugar.com
VictorTiz · March 22, 2023 at 4:13 pm
By checking information using the service using the whois protocol, the user will immediately poiskmonet.com determine the registrar and site administrator when this domain was registered on the hosting.
JamesFap · March 22, 2023 at 7:52 pm
todayusanews24.com
DonaldFex · March 22, 2023 at 8:52 pm
When purchasing crystal tree toys, it is supesolar.com necessary to consider several points.
Davidmib · March 23, 2023 at 4:05 am
instukzia.com
TerryFAB · March 23, 2023 at 4:30 am
The solver is quite stroihome.net capable of replacing a tutor for a child.
Kellyjomia · March 23, 2023 at 2:33 pm
How to train puppy Youtube Watch a good video
CharlesSig · March 24, 2023 at 2:22 am
Crystal toys, made in the form of various biznesnewss.com figurines and characters, are a special delicacy.
Thomasrhine · March 24, 2023 at 2:46 am
besttoday.org
RobertNonna · March 24, 2023 at 6:54 am
nebrdecor.com
StevenGrilt · March 24, 2023 at 7:01 am
Availability of a certificate for each toy, which krepezh.net confirms its quality and safety.
JamesNef · March 24, 2023 at 12:56 pm
https://biblaktanishru.ru/
Ronnieframe · March 24, 2023 at 5:37 pm
emergate.net
Williamtyday · March 24, 2023 at 8:53 pm
http://itsoftnews.com/2022/11/23/surge-in-ransomware-attacks-exposes-u-s-cyber-vulnerabilities/
Williamtreaf · March 24, 2023 at 8:58 pm
Should be guided by the alanews24.com stylistic direction of the product, the theme of the decoration of the room and the tree itself.
AndrewLok · March 24, 2023 at 10:01 pm
Puppy training gettogether Watch an interesting video
RichardVog · March 25, 2023 at 2:22 am
If you choose to work through an individual account radioshem.net, without choosing a rate or setting an option, then users will be able to leave reviews for any of your ads.
JamesCog · March 25, 2023 at 5:20 am
When placing any Internet resource with a provider repairtoday7.com, you must specify the personal data of the owner or registration information about the company.
TerryVax · March 25, 2023 at 5:37 am
stroynews.info
RichardSor · March 25, 2023 at 12:02 pm
They accompany them with a score tatraindia.com, which will then be used to calculate the ranking.
LouisFut · March 25, 2023 at 1:56 pm
If we talk about the real estate section newsprofit.info, then reviews can be left in small regions in the short-term rental subcategory.
Michaelemult · March 25, 2023 at 2:18 pm
[url=https://trimox.charity/]augmentin 875 pills[/url]
JosephMaict · March 25, 2023 at 3:39 pm
[url=https://cafergot.lol/]cafergot[/url]
Timothyroark · March 25, 2023 at 3:56 pm
Dog training Youtube Watch the video
BrandonGix · March 25, 2023 at 4:43 pm
newssahara.com
WilliamWem · March 25, 2023 at 6:51 pm
[url=https://happyfamilypharmacy.boutique/]online pharmacy 365 pills[/url]
Samuelraisk · March 25, 2023 at 6:56 pm
[url=https://cymbalta.directory/]drug cymbalta[/url]
ElwoodGon · March 25, 2023 at 8:24 pm
[url=http://dexamethasone.sbs/]dexamethasone 1.5 mg[/url]
DavisMug · March 25, 2023 at 9:25 pm
[url=https://cipro.directory/]ciprofloxacin cream[/url]
MaryCounk · March 25, 2023 at 11:05 pm
[url=https://cephalexin.wiki/]buy cephalexin 500mg online uk[/url]
HenryAbate · March 26, 2023 at 2:26 am
1newss.com
Edwardvioms · March 26, 2023 at 2:30 am
Remember that the rating everbestnews.com will not be affected by the comments that the client left without accompanying it with asterisks.
Samuelraisk · March 26, 2023 at 10:49 am
[url=https://retinoa.charity/]retino cream[/url]
LarrySok · March 26, 2023 at 11:43 am
A low rating, on the contrary teplica-parnik.net, repels customers, so try to offer only a high level of quality of service.
ElwoodGon · March 26, 2023 at 12:31 pm
[url=https://keflextabs.online/]cephalexin 250 mg price[/url]
DarrylSef · March 26, 2023 at 3:38 pm
[url=https://cleocin.lol/]clindamycin 300 mg tablet[/url]
EyeCounk · March 26, 2023 at 4:00 pm
[url=http://zithromaxpill.online/]zithromax generic brand[/url]
KennethBal · March 26, 2023 at 6:23 pm
ochen-vkusno.com
CarlosIcept · March 26, 2023 at 8:24 pm
Designers recommend sticking to a single stagramer.com color scheme that will allow you to achieve more style and harmony.
Aaronphymn · March 26, 2023 at 8:38 pm
Useful tips for choosing Christmas decorations aparthome.org, where to buy them.
Williamdouts · March 27, 2023 at 8:52 am
In fact, solvers improve the quality of homework and contribute auto-kar.net to a better understanding of the topic.
Curtisvibia · March 27, 2023 at 10:21 am
[url=https://augmentinamoxicillin.online/]amoxicillin 625 price in india[/url]
ErnestGuern · March 27, 2023 at 11:44 am
salaty-na-stol.info
Jamesjuite · March 27, 2023 at 1:02 pm
The average student is able to cope with them balforum.net, but many attend circles, sections, music or art schools in parallel, go to olympiads and competitions.
AndreCag · March 27, 2023 at 8:26 pm
All products are made from natural materials 2fight.info that have been tested in factories.
TerryWed · March 27, 2023 at 8:33 pm
ukrtvoru.info
tamoxifen 10 mg medication · March 28, 2023 at 3:02 am
order glimepiride glimepiride 4 mg coupon glimepiride pharmacy
MichaelFep · March 28, 2023 at 11:10 am
экспертиза квартиры для суда
LutherFer · March 28, 2023 at 1:41 pm
First, the homeprorab.info student must solve the problem on his own or try to do it.
Terrywes · March 29, 2023 at 6:58 am
betwinner зеркало
PedroNop · March 29, 2023 at 3:45 pm
телевизор kivi
PedroNop · March 29, 2023 at 5:13 pm
телевизор сони купить в москве
PedroNop · March 30, 2023 at 5:10 am
sony bravia телевизор
aldactone coupon · March 30, 2023 at 6:22 am
propecia australia propecia medication propecia 1mg medication
virgin casino online nj · March 30, 2023 at 2:27 pm
win real money online casino app for free real money online casino no deposit code best online casino real money pennsylvania
aricept 5 mg price · March 30, 2023 at 11:24 pm
depakote 500 mg uk cheap depakote depakote united states
Joshuacef · March 31, 2023 at 9:40 am
app razor shark
Shaynefuh · March 31, 2023 at 2:04 pm
трансфер в шерегеш
Calvinmalge · March 31, 2023 at 4:33 pm
джойказино зеркало
Wesleyreify · March 31, 2023 at 7:10 pm
Hd pussy shaved
glimepiride without a doctor prescription · April 1, 2023 at 6:37 pm
sildenafil australia sildenafil tablet how to buy sildenafil
Wesleyreify · April 2, 2023 at 7:37 am
Cumshot shaved pussy
WillieCOIDS · April 4, 2023 at 8:56 pm
натяжные потолки дешево москва
RobertTet · April 4, 2023 at 9:30 pm
https://wiki.darkworld.network/index.php/Ayudar_A_Un_Ser_Querido_A_Perder_Peso
WillieCOIDS · April 5, 2023 at 12:11 am
antor-sp.ru
RobertTet · April 5, 2023 at 12:11 am
https://wikirecipe.net/index.php/Caracter%C3%83%C2%ADsticas_De_La_Forma_F%C3%83%C2%ADsica_Despu%C3%83_s_De_Los_40
RobertTet · April 5, 2023 at 12:35 am
https://justiceforuswgowiki.ml/index.php/C%C3%B3mo_Adelgazar_Si_El_Peso_Es_Excesivo
RobertTet · April 5, 2023 at 3:08 am
https://pgttp.wiki/index.php/C%C3%B3mo_Adelgazar_R%C3%A1pidamente_Y_Sin_Perjudicar_La_Salud
RobertTet · April 5, 2023 at 3:31 am
http://wiki.rmtelecom.ru/index.php?title=%D0%A3%D1%87%D0%B0%D1%81%D1%82%D0%BD%D0%B8%D0%BA:Bruce95341
RobertTet · April 5, 2023 at 6:03 am
https://cn-stage-1.wmcloud.org/wiki/User:ImogenPrim53
RobertTet · April 5, 2023 at 6:28 am
https://www.labprotocolwiki.org/index.php/M%C3%83_todo_De_Adelgazamiento
RobertTet · April 5, 2023 at 9:17 am
https://www.tuningwiki.org/C%C3%B3mo_Adelgazar_R%C3%A1pido_En_Una_Semana
RobertTet · April 5, 2023 at 9:45 am
https://netcallvoip.com/wiki/index.php/User:CelesteQgh
BruceBar · April 5, 2023 at 11:20 am
[url=https://www.youtube.com/watch?v=lKlhZbjTI3A]baby puzzles[/url]
[url=https://www.youtube.com/watch?v=Rs8V2iaStYQ]educational game for children[/url]
RobertTet · April 5, 2023 at 12:45 pm
https://parentingliteracy.com/wiki/index.php?title=5_Maneras_De_Adelgazar_En_Verano
RobertTet · April 5, 2023 at 1:19 pm
https://cprgpuwiki.com/index.php/Ayudar_A_Un_Ser_Querido_A_Perder_Peso
WillieCOIDS · April 5, 2023 at 1:48 pm
https://ap-potolki.ru/
Lesliewed · April 5, 2023 at 3:18 pm
http://xn--m1abbbg.cam/
Lesliewed · April 5, 2023 at 4:22 pm
http://xn--m1abbbg.vip/
Lesliewed · April 5, 2023 at 5:25 pm
http://www.komandor-marine.ru/
Lesliewed · April 5, 2023 at 6:27 pm
http://www.esoled.ru/
WillieCOIDS · April 5, 2023 at 7:20 pm
iaoy?iua iioieee caeacaou
Lesliewed · April 5, 2023 at 7:31 pm
http://techfaq.ru/
Lesliewed · April 5, 2023 at 8:40 pm
http://industry-it.ru/
Lesliewed · April 5, 2023 at 9:48 pm
http://nikolaevka-mo.ru/
BrianTrume · April 5, 2023 at 10:04 pm
https://gita.indicwiki.in/index.php?title=User:Hope6765119
BrianTrume · April 5, 2023 at 10:30 pm
https://errare-humanum-est.org/index.php?title=%C3%90%C5%A1%C3%91%C6%92%C3%91%E2%82%AC%C3%91%C3%91%E2%80%B9_%C3%90%C3%90%C2%BD%C3%90%C2%B3%C3%90%C2%BB%C3%90%C2%B8%C3%90%C2%B9%C3%91%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BE_%C3%90%C2%AF%C3%90%C2%B7%C3%91%E2%80%B9%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B3%C3%90%C2%BE%C3%90%C2%B3%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B5
Robertphync · April 5, 2023 at 10:45 pm
https://guide-saisie.filiere-oscar.fr/mediawiki/index.php?title=Utilisateur:IrishPinkston0
Lesliewed · April 5, 2023 at 10:51 pm
http://www.pr-line.ru/
Robertphync · April 5, 2023 at 11:11 pm
https://livingbooksaboutlife.org/books/User:FelipaQaj92
Lesliewed · April 5, 2023 at 11:55 pm
http://www.xn--2015-43dl0dg0aab9brh1e.xn--p1ai/
Lesliewed · April 6, 2023 at 1:10 am
http://xn--e1aecfjdenbacbnzkf4s.xn--p1ai/
Lesliewed · April 6, 2023 at 2:24 am
http://4vkusa.ru/
Lesliewed · April 6, 2023 at 3:35 am
http://www.racu.ru/
Lesliewed · April 6, 2023 at 4:50 am
http://71234.adminka.cc
MaribelTut · April 6, 2023 at 7:03 am
http://gallery-3.ru/
MaribelTut · April 6, 2023 at 8:08 am
http://kstatida.ru
MaribelTut · April 6, 2023 at 9:13 am
http://618351.ru/
MaribelTut · April 6, 2023 at 10:19 am
http://seo-toria.ru/
MaribelTut · April 6, 2023 at 11:24 am
http://carrotstyle.ru/
MaribelTut · April 6, 2023 at 12:28 pm
http://marchlab.ru/
MaribelTut · April 6, 2023 at 1:32 pm
http://www.kongru.ru/
MaribelTut · April 6, 2023 at 2:36 pm
http://www.maratmazur.ru/
MeghanShuby · April 6, 2023 at 3:42 pm
http://2023.adminka.cc/
RickykAl · April 6, 2023 at 4:09 pm
английская магниевая соль
RickykAl · April 6, 2023 at 4:30 pm
https://day-body.ru/
MeghanShuby · April 6, 2023 at 4:46 pm
http://120345.adminka.cc/
RogelioMus · April 6, 2023 at 5:41 pm
https://polyglot35.ru/
MeghanShuby · April 6, 2023 at 5:48 pm
http://241455.adminka.cc/
MaribelTut · April 6, 2023 at 6:51 pm
http://163461.adminka.cc/
MaribelTut · April 6, 2023 at 7:58 pm
http://32534631.adminka.cc/
MaribelTut · April 6, 2023 at 9:00 pm
http://294772.adminka.cc/
MaribelTut · April 6, 2023 at 10:03 pm
http://292663.adminka.cc/
MaribelTut · April 6, 2023 at 11:03 pm
http://21718.adminka.cc/
MaribelTut · April 7, 2023 at 12:04 am
http://835456.adminka.cc/
MaribelTut · April 7, 2023 at 1:05 am
http://920066.adminka.cc/
MaribelTut · April 7, 2023 at 2:06 am
http://351708.adminka.cc/
MaribelTut · April 7, 2023 at 3:08 am
http://491666.adminka.cc/
MaribelTut · April 7, 2023 at 4:08 am
http://734557.adminka.cc/
MaribelTut · April 7, 2023 at 5:10 am
http://761028.adminka.cc/
MaribelTut · April 7, 2023 at 6:11 am
http://407190.adminka.cc/
MaribelTut · April 7, 2023 at 7:12 am
http://26598.adminka.cc/
MaribelTut · April 7, 2023 at 8:14 am
http://28057.adminka.cc/
MaribelTut · April 7, 2023 at 9:16 am
http://352068.adminka.cc/
MaribelTut · April 7, 2023 at 10:18 am
http://536579.adminka.cc/
MaribelTut · April 7, 2023 at 11:19 am
http://98505.adminka.cc/
MaribelTut · April 7, 2023 at 12:20 pm
http://329885.adminka.cc/
MaribelTut · April 7, 2023 at 1:22 pm
http://509591.adminka.cc/
MaribelTut · April 7, 2023 at 2:16 pm
http://903955.adminka.cc/
MaribelTut · April 7, 2023 at 3:07 pm
http://357634.adminka.cc/
MaribelTut · April 7, 2023 at 3:58 pm
http://129802.adminka.cc/
MaribelTut · April 7, 2023 at 4:49 pm
http://916750.adminka.cc/
MaribelTut · April 7, 2023 at 5:39 pm
http://280737.adminka.cc/
MaribelTut · April 7, 2023 at 6:30 pm
http://918993.adminka.cc/
MaribelTut · April 7, 2023 at 7:20 pm
http://449978.adminka.cc/
MaribelTut · April 7, 2023 at 8:10 pm
http://4930.adminka.cc/
MaribelTut · April 7, 2023 at 8:59 pm
http://365073.adminka.cc/
fallenJeams · April 8, 2023 at 6:23 am
На сайте https://j-center.ru/ вы сможете записаться в школу парикмахерского мастерства Юлии Бурдинцевой. К важным преимуществам обращения относят то, что все навыки, практическая часть оттачиваются на клиентах. Преподаватели дают небольшое количество теории, делают акцент на практике. Все, кто закончил школу, получают огромный опыт, они учатся общаться с клиентами, что очень важно в данной сфере. Вы сможете воспользоваться несколькими форматами обучения: индивидуально, экстерн, в группах.
ManuelNor · April 8, 2023 at 6:25 am
[url=https://historyofficial.com/]Дагестанский камень[/url]
blackWal · April 8, 2023 at 6:58 am
На сайте https://poberegie.site/ забронируйте жилье любого типа на побережье. Есть возможность снять дом, коттедж либо квартиру, стильную студию, в которой будет иметься все для проживания. И самое главное, что только для вас установлены приемлемые цены, а снять жилье вы сможете на любое количество дней, в том числе, на неделю. Есть возможность выложить свой объект вместе с картинками и описать его. Бронируйте жилье у собственника и заранее. Для того чтобы лучше сориентироваться в предложениях, почитайте отзывы клиентов.
sandiTus · April 8, 2023 at 7:01 am
На сайте http://roccostudio.ru вы сможете заказать площадки, детские домики, хозблоки, бытовки, выполненные из надежных, практичных и качественных материалов, которые экологически безопасные, не провоцируют выброса опасных веществ в атмосферу. За счет того, что конструкции выполнены по уникальной технологии, то они простоят очень долго и не утратят изначальных характеристик. Вы можете выбрать любой дизайн, который обязательно вас устроит. Для получения консультации обратитесь к менеджеру, который ответит на все вопросы, подберет лучший вариант.
EdwinHog · April 8, 2023 at 7:03 am
https://aboutsmarttv.ru/news/
exomibanero · April 8, 2023 at 7:04 am
На сайте https://piastrix-info.online/ вы сможете получить всю актуальную, интересующую информацию, которая касается кошелька Piastrix. Особенностью является то, что оператор дает возможность хранить деньги в самой разной валюте: рублях, тенге, евро, долларах. Платежная система защищает данные, а также средства клиента от третьих лиц, а потому вы можете не сомневаться в надежности кошелька. Вы узнаете о том, как пройти регистрацию, если являетесь новым клиентом. Есть наглядные схемы и картинки, которые помогут произвести подключение максимально быстро.
aussiGot · April 8, 2023 at 7:11 am
На сайте https://videoline.spb.ru/ustanovka-videonablyudeniya/ вы сможете воспользоваться такой нужной и популярной услугой, как профессиональная установка видеонаблюдения. Это даст возможность обеспечить безопасность на любом коммерческом объекте. В компании работают лучшие специалисты, которые отлично понимают в данном вопросе и берутся за выполнение проекта независимо от сложности. Важно то, что используется только высокотехнологичное, современное оборудование, которое работает бесперебойно, точно и качественно.
gutermKaw · April 8, 2023 at 7:39 am
На сайте https://dostoevskiyfyodor.ru/ ознакомьтесь с биографией Федора Михайловича Достоевского. Вы узнаете о том, кем он был: писателем, мыслителем, публицистом и философом. Он считается лучшим романистом этой эпохи. Именно поэтому заполучил такую популярность среди тех, кто любит читать увлекательные рассказы. Кроме того, узнаете о происхождении, о том, кем были его отец и мать. Будете в курсе того, почему Достоевский начал писать книги. Есть и интересные факты из его биографии. Имеются данные про детство и отрочество.
LarryTuh · April 8, 2023 at 10:37 am
https://telearchaeology.org/TAWiki/index.php/User:KatlynBeals
LarryTuh · April 8, 2023 at 11:28 am
https://manchesterclopedia.win/wiki/User:RussMcCollister
leafmPioro · April 8, 2023 at 2:44 pm
На сайте https://grsuv.ru/ вы сможете заказать такую нужную и востребованную услугу, как лазерная гравировка с выездом к заказчику. Можно выполнить гравировку на крупных объектах. Также есть возможность заказать шильдик на самоклеющейся пленке, пуансоны матрицы. Также можно выполнить гравировку по окружности. Со всеми примерами работ ознакомьтесь в портфолио. Вы можете сами выбрать шрифт, необходимые изображения. Изучите расценки, которые остаются на доступном уровне. Для того чтобы воспользоваться услугами, позвоните по обозначенному телефону.
osnoeTag · April 8, 2023 at 3:23 pm
На сайте https://www.hochzeitsfotograf-trevla.de/ вы сможете заказать фотосъемку свадебной фотосессии от настоящего профессионала. Он использует в работе только высокотехнологичное оборудование, которое позволяет получить такой результат. При обработке снимков фотограф использует современные методики. Услуга оказывается по доступной стоимости, а проект будет сдан в минимальные сроки. Для того чтобы лучше ознакомиться с творчеством, изучите портфолио. Фотограф выбирает такие места, которые идеально подходят для красочной фотосессии. Он запечатлеет яркие и искренние эмоции.
Kendrickempixelm · April 8, 2023 at 4:03 pm
Zifferblatt antibakteriell
DavidDaulk · April 8, 2023 at 4:35 pm
https://ruseriya.ru/8151-uyti-chtoby-vernutsya-1-sezon.html
rmakovDum · April 8, 2023 at 5:07 pm
На сайте https://poppers-store.ru/ можно заказать качественные попперсы канадского, французского, английского американского производства. Также есть наборы для попперсов, различные нужные аксессуары. Обязательно ознакомьтесь с хитами продаж, которые нравятся большинству покупателей. А еще есть рекомендованные товары, которые будут вам полезны и доставят радость от использования. На портале также вы найдете и полезные информативные статьи на данную тему. Вы узнаете и о том, как правильно выбрать попперс для себя.
bonnvHeabs · April 8, 2023 at 5:16 pm
На сайте https://10casinolist.com/ вы сможете ознакомиться с топом самых лучших казино этого года. Они работают честно, на прозрачных условиях, а потому эти площадки выбирает большинство. И самое главное, что ведут свою деятельность открыто, регулярно выплачивают средства, не обманывают, радуют игроков своей бонусной политикой, а также различными акциями. Это позволит вам заработать много денег и, наконец, исполнить свою мечту. Рейтинг казино регулярно обновляется, чтобы предложить вам проверенные заведения.
andegsar · April 8, 2023 at 6:33 pm
На сайте https://vgosti.site/ вы сможете забронировать любой выгодный вариант: стандарт в курортном отеле, базу отдыха, отдельный номер в отеле, койка место, семейный номер и многое другое по доступной стоимости и на любое количество времени. Каждый желающий сможет разместить свой объект согласно правилам сайта. Для того чтобы ваше объявление заинтересовало, необходимо загрузить фотографии. Так вы будете получать предложения от потенциальных покупателей. Вы сможете зарабатывать на этом и развиваться.
tractorox · April 8, 2023 at 6:51 pm
На сайте https://ay-tour.ru/korporativy/ можно заказать корпоративный отдых большим и дружным коллективом. Так вы сможете сплотить свою команду, смотивировать сотрудников и сделать так, чтобы все работники действовали сплоченно. Высококлассные специалисты компании на профессиональном уровне организуют семинары, съезды, конференции, а также презентации и выставки. В работе обязательно учитывают пожелания, потребности и особенности сферы деятельности. Важно то, что корпоративные мероприятия могут организовываться в любое время.
bubarlab · April 8, 2023 at 11:39 pm
На сайте https://urrobot.net вы сможете воспользоваться комплексным программным решением, которое адаптировано под потребности юридических лиц. Важным моментом является то, что интеллектуальный робот работает в несколько раз эффективней, чем человек, обойдется вам дешевле. Специально для вас сейчас действует акция, которая позволяет воспользоваться предложением бесплатно в течение месяца. Работа интеллекта заключается в том, чтобы обзванивать должников, а также принимать звонки, сотрудничать как с физическими, так и юридическими лицами.
martydak · April 8, 2023 at 11:41 pm
На сайте http://www.thaistar.ru/ запишитесь на СПА-услуги, профессиональный массаж, который поможет расслабиться, получить море удовольствия от полного релакса. Воспользуйтесь СПА-программами, расслабляющим массажем или купите сертификат, чтобы преподнести его в подарок близкому человеку. В компании работают компетентные, грамотные массажисты, которые используют в работе натуральные аромамасла, эффективную косметику. На все услуги установлены привлекательные расценки, что сделает посещение заведения более приятным.
darkkMuh · April 9, 2023 at 3:16 am
На сайте https://am-spb.com/ позвоните по телефону для того, чтобы воспользоваться помощью на дорогах. Так есть возможность заказать подзарядку аккумулятора, вскрытие автомобиля, отключение сигнализации и воспользоваться другими нужными услугами. Все работы выполняются на высоком уровне, максимально оперативно и качественно. В компании работают лучшие мастера, для которых нет невыполнимых задач. На все работы предоставляются гарантии. Воспользуйтесь и вы услугами компании, которая работает специально для вашего комфорта.
jumboRex · April 9, 2023 at 6:31 am
На сайте https://venttehnica.ru/ вы сможете заказать кондиционеры, а также их монтаж. В разделе имеются инфракрасные обогреватели, промышленные кондиционеры, тепловые завесы, тепловые пушки, конвекторы, водонагреватели и многое другое. А самое главное, что все это реализуется по доступным ценам, с оперативной доставкой и от именитых брендов. Очень часто проводятся акции, которые позволят сэкономить бюджет. Есть раздел с популярными товарами, которые выбирает большинство. На все товары есть гарантии, которые подтверждают то, что они оригинальные.
happyket · April 9, 2023 at 7:59 am
Купить салют и фейерверки в СПб. Высококачественные салюты и фейерверки в СПб. Купить пиротехнику в интернет ресурсе Нева-Салют по выгодной стоимости с бесплатной доставкой или удобным самовывозом он-лайн заказов. Пиротехническое представление под ключ. https://neva-salut.com/
taroslycle · April 9, 2023 at 8:33 am
На сайте https://hotplayer.ru вы сможете послушать приятную, красивую музыку, которая произведет на вас впечатление. Она яркая, изысканная и харизматичная. Перед вами только популярные композиции, которые обязательно вам понравятся и произведут эффект. Все они представлены в отличном качестве, с хорошим звуком, поэтому подарят наслаждение от прослушивания. Певцы стараются произвести впечатление на своих поклонников, а потому поют про любовь, приятные чувства. Регулярно появляются новые песни, которые обязательно западут в душу.
Bryonsut · April 9, 2023 at 11:01 am
http://ruall.com/raznoe-po-biznesu/68620-pereshiv-shub-v-moskve.html#68620
harvathync · April 9, 2023 at 1:53 pm
МАССАЖИСТ.РУ – Массаж Москва. Каталог профессиональных массажистов Москвы публикует услуги массаж с выездом на дом и массаж в салоне. Сайту 20 лет, это значит, что он надежный и зарекомендовал себя как качественный сервис. На сайте МАССАЖИСТ РУ вы найдёте предложения: антицеллюлитный массаж, аромамассаж, общий массаж, коррекция фигуры массажем, косметический, лечебный, лимфодренажный, мануальная терапия, массаж для беременных и для пожилых, массаж спины, медовый, спортивный массаж, стоунтерапия, тайский и шиатсу.
Normansmove · April 9, 2023 at 4:25 pm
[url=https://historyofficial.com/]Дагестанский камень[/url]
Bryonsut · April 9, 2023 at 4:25 pm
http://mirmamok.ru/forum/posts/315789
Bryonsut · April 9, 2023 at 5:14 pm
https://www.izhforum.info/forum/izhevsk/viewtopic.php?f=26&t=141629
hiteroRed · April 9, 2023 at 6:18 pm
На сайте https://paporotnik.pro/ вы сможете записаться на услугу, чтобы вам оказали психологическую помощь. В центре помогут улучшить качество жизни за счет уникальных, авторских и продвинутых методик. Здесь работают лучшие специалисты, которые трудятся на результат. Вы сможете воспользоваться помощью семейного, детского психолога, узнать о своих проблемах. Специалист подберет пути их решения. Именно поэтому уже сразу же после первого сеанса вы начнете чувствовать себя более жизнерадостным и активным, способным на свершения.
PedroSkype · April 9, 2023 at 9:58 pm
гет икс официальный сайт
crazydog · April 10, 2023 at 12:28 am
Тут ответы на все вопросы: Хургада сайт. Куда поехать в Египет? Самый лучший курорт в Египте. Где побывать в Египте? Какой отель в Египте выбрать для отдыха. Когда лучше лететь в Египет? Гид-онлайн по наиболее комфортным для туристов отелям, вкусным ресторанам и кафе, выгодным торговым центрам и магазинам, по интересным местам и улицам городов Египта.
mendyNem · April 10, 2023 at 4:37 am
На сайте https://turk-kino.ru вы сможете начать просмотр интересного, увлекательного турецкого фильма и устроить совместный просмотр вместе с друзьями. Для того чтобы выбрать подходящий вариант, воспользуйтесь специальным каталогом, в котором имеется вся подборка интересных, увлекательных фильмов на самую разную тему. Все они про любовь, добрые отношения и чистые чувства, поэтому вызовут интерес. Все фильмы в отличном качестве. Есть как ожидаемые новинки, так и те, что успели полюбиться любознательному зрителю.
Callieskago · April 10, 2023 at 5:24 am
http://bellagente.ru
temptSocky · April 10, 2023 at 6:07 am
На сайте https://m-strop.by/ можно заказать стропы различных модификаций, стяжные ремни, звенья для строп, захват для металла, таль цепную. Компания, которая находится на рынке уже много времени, наладила собственное производство стяжных ремней, строп. Вся необходимая продукция находится на складе и в любом количестве, а потому вы можете ее заказать прямо сейчас с оперативной отгрузкой. Оптовые покупатели получают возможность воспользоваться более лояльными условиями покупки. Вся продукция поставляется по доступным ценам.
Marianut · April 10, 2023 at 7:11 am
http://abm-motors.ru
TheresaAgorO · April 10, 2023 at 7:40 am
http://ivanpoukhkal.ru
Bryonsut · April 10, 2023 at 7:58 am
http://abs70.ru/showthread.php?p=9289#post9289
Pamelavax · April 10, 2023 at 8:09 am
http://bg-pr.ru
Juliewah · April 10, 2023 at 8:38 am
http://www.about-scotland.ru/
Lauranug · April 10, 2023 at 9:08 am
http://komitetri.ru
Hermineboulp · April 10, 2023 at 9:39 am
http://visitsalekhard.ru
Staceysauck · April 10, 2023 at 10:09 am
http://alizamarket.ru
Cecilebip · April 10, 2023 at 10:39 am
https://kvest-center.ru/
ElaineSNONE · April 10, 2023 at 11:10 am
http://www.arendel.ru/
TiffanyNef · April 10, 2023 at 11:40 am
http://supermarket58.ru
Wilburbof · April 10, 2023 at 12:09 pm
скачать порно
EleanorVap · April 10, 2023 at 12:09 pm
http://ecdetailing.ru
EmoryGlurb · April 10, 2023 at 12:20 pm
[url=https://ru.pinterest.com/dagestankameen/%D0%B4%D0%B0%D0%B3%D0%B5%D1%81%D1%82%D0%B0%D0%BD%D1%81%D0%BA%D0%B8%D0%B9-%D0%BA%D0%B0%D0%BC%D0%B5%D0%BD%D1%8C/]дагестанский камень[/url]
Laurainowl · April 10, 2023 at 12:39 pm
http://tonus-omsk.ru
SherrieLor · April 10, 2023 at 1:10 pm
http://www.modaburgo.ru/
TanyaSmath · April 10, 2023 at 1:37 pm
http://lingvostudy.ru
PhyllisSeard · April 10, 2023 at 2:08 pm
http://zabronirovat-otel.ru
Eleanorimapy · April 10, 2023 at 2:38 pm
http://djays.ru
happyket · April 10, 2023 at 3:16 pm
Купить салют и фейерверки в СПб. Качественные салюты и фейерверки в СПб. Купить пиротехнику в интернет-магазине Нева-Салют по доступной цене с бесплатной доставкой или комфортным самовывозом онлайн заказов. Пиротехническое представление под ключ. https://neva-salut.com/
mambaNip · April 10, 2023 at 4:28 pm
На сайте https://www.pro100gamers.ru вы сможете получить всю необходимую информацию, которая касается популярных компьютерных игр. Здесь вы найдете данные о предстоящих играх, есть крупные обновления и другая информация, которая будет вам интересна. Этот сайт понравится всем геймерам, которые отслеживают новые данные, свежие статьи и материалы. На этом портале вы без труда отыщите игры как из прошлого, так и настоящего, которые прогремели на весь мир. Здесь собраны только лучшие игры, качественный контент.
Robertlag · April 10, 2023 at 7:26 pm
Youtube babelcube Watch the video
PatrickSpoli · April 10, 2023 at 7:56 pm
https://www.autoparus.by/
Mariafueta · April 11, 2023 at 7:12 am
http://i-2018.ru
MinnieFleds · April 11, 2023 at 7:41 am
http://decor35.ru
DorothyOccal · April 11, 2023 at 8:10 am
http://br-studio.ru
Latonyamib · April 11, 2023 at 8:38 am
http://moimir05.ru
desazpenna · April 11, 2023 at 8:43 am
En el sitio https://sabemos.net/ puedes encontrar soluciones para tareas en varias materias y disciplinas. Podrás aprender y respuestas absolutamente gratis a la mayoría de las disciplinas. Conocimiento gratuito para todos en el sitio.
kypipOxync · April 11, 2023 at 9:06 am
На сайте https://boevojlistok.ru/ вы сможете изучить интересные и увлекательные статьи, которые касаются боевых действий на Украине. Имеются новости, сводки с фронта, аналитические статьи, а также комментарии, отзывы медийных лиц, которые высказывают свое мнение по этому поводу. Имеется информация, которая освещает события на Донбассе, есть информативные сводки. Важно то, что контент всегда свежий, актуальный, интересный. Для поиска нужного материала воспользуйтесь специальным меню. Заходите сюда регулярно.
BrianaDak · April 11, 2023 at 9:09 am
http://www.sailfd.ru/
ClaudiaCoani · April 11, 2023 at 9:39 am
http://art-taller.ru
AmandaPherb · April 11, 2023 at 10:10 am
http://tuttalamoda.ru
BonnieCic · April 11, 2023 at 10:40 am
http://azkr.ru
Melindaron · April 11, 2023 at 11:11 am
http://nerowolfe.ru
travispaync · April 11, 2023 at 11:22 am
На сайте https://igratik.ru/ находятся самые популярные, лучшие игры, которые понравятся всем, кто любит проводить время именно так и получать от этого удовольствие. Перед вами только популярные, известные и любимые многими игры. А если не получается отыскать определенную игру на других ресурсах, то здесь вы ее точно найдете. Вы получаете возможность почитать всю необходимую информацию, знакомиться с точной датой выхода игры, узнать, будет ли у нее продолжение. Интересная статья сопровождается красочной и яркой картинкой.
Sarahneend · April 11, 2023 at 11:41 am
http://gazturbo.ru
Jamiemax · April 11, 2023 at 12:11 pm
http://seoabc.ru
ShelleyFum · April 11, 2023 at 12:40 pm
https://www.flyavi.ru/
Rosaliefoews · April 11, 2023 at 1:10 pm
http://www.1774.ru/
NicoleDiaws · April 11, 2023 at 1:40 pm
http://www.smartcityproject.ru/
DeniseCRODA · April 11, 2023 at 2:10 pm
http://www.arnold-bs.ru/
Kelleyten · April 11, 2023 at 2:40 pm
http://mfmm.ru
TammiDub · April 11, 2023 at 3:11 pm
http://opeka-klin.ru
WhitneyCex · April 11, 2023 at 3:41 pm
http://barcelona-nsk.ru
BonitaHip · April 11, 2023 at 4:11 pm
http://beedecor.ru
SheenaLig · April 11, 2023 at 4:43 pm
http://www.graffiti-a.ru/
ThelmaPriop · April 11, 2023 at 5:14 pm
https://mile-motors.ru/
Caroltried · April 11, 2023 at 5:44 pm
https://ladoprom.ru/
Tishatar · April 11, 2023 at 6:13 pm
http://ml500.ru
eakdiWhash · April 11, 2023 at 6:38 pm
Зарабатываем на трейдинге с помощью AI. Подробнее на нашем сайте: https://trade-capitan.ru/ Вы узнаете: технические индикаторы, торговые сигналы, торговые стратегии, ежедневная аналитика, обзоры и тренды рынка, прогнозные модели. Подписывайся, и зарабатывай с нами.
Emilywaf · April 11, 2023 at 6:44 pm
http://www.shtory72.ru/
Carolynked · April 11, 2023 at 7:14 pm
http://bitemup.ru
Georgiazen · April 11, 2023 at 7:45 pm
http://carpe-viam.ru
RalphChono · April 11, 2023 at 8:09 pm
ап икс
NicholeBrava · April 11, 2023 at 8:12 pm
http://www.dosh-journal.ru/
samirGox · April 11, 2023 at 8:27 pm
На сайте https://www.bufetout.ru/ вы сможете воспользоваться высококлассным кейтерингом. В компании организуют кофе-брейк, фуршеты, обслуживание на различных мероприятиях, проводится корпоратив. Все блюда готовятся из качественных, отборных продуктов, а потому питание на вкус вам очень понравится. По вашему желанию будет выполнена разработка индивидуального меню, будет подобрана посуда, а также декор. Заказать услугу получится при помощи одного лишь звонка. Получите консультацию у менеджера.
RalphChono · April 11, 2023 at 8:28 pm
up x
EvelynFrife · April 11, 2023 at 8:43 pm
http://maxfarmo.ru
ciferfrigo · April 11, 2023 at 8:43 pm
На сайте https://dcendy.ru вы сможете приобрести все необходимое электротехническое оборудование: сварочные инверторы, вакуумные упаковщики, сетевые фильтры, удлинители, фотовспышки и многое другое. Все представленные товары от лучших, проверенных производителей, показавших себя с положительной стороны. Ознакомьтесь с рубрикой «Горячие предложения», где собраны самые популярные варианты по более привлекательной стоимости. Регулярно появляются новинки, которые вы по достоинству оцените.
BruceJilky · April 11, 2023 at 8:49 pm
Watch an interesting video survinat.ru Youtube
BarbaraHat · April 11, 2023 at 9:13 pm
http://masterskaja-ujuta.ru
Amandaasype · April 11, 2023 at 9:44 pm
http://sheepandwolves.ru
BobbiVog · April 11, 2023 at 10:15 pm
http://sichi-adm.ru
Tabithadib · April 11, 2023 at 10:45 pm
https://www.9861636.ru/
RachelSon · April 11, 2023 at 11:16 pm
http://www.all-diets.ru/
Hazelbob · April 11, 2023 at 11:46 pm
http://www.hramluki.ru/
Jessicajothe · April 12, 2023 at 12:16 am
http://prudekb.ru
Karinjat · April 12, 2023 at 12:44 am
http://www.gk-pusk.ru/
Donnajet · April 12, 2023 at 1:15 am
http://движениеавтомобилистов.рф/
Gracegop · April 12, 2023 at 1:44 am
http://www.xray-auto.ru/
MariaStult · April 12, 2023 at 2:14 am
http://well-socks.ru
Reneelew · April 12, 2023 at 2:44 am
http://www.integris-m.ru/
LauraKiz · April 12, 2023 at 3:14 am
http://www.cdutur.ru/
ChloeOvelm · April 12, 2023 at 3:44 am
http://www.blkspb.ru/
Carolynesops · April 12, 2023 at 4:14 am
http://alexandravoronina.ru
NancyCor · April 12, 2023 at 4:45 am
http://www.tsl-nsk.ru/
MaryannPub · April 12, 2023 at 5:15 am
http://vita-arkhyz.ru
IngridDic · April 12, 2023 at 5:44 am
http://russellterrier-club.ru
Paulinesligo · April 12, 2023 at 6:14 am
http://papaudm.ru
CherylChunc · April 12, 2023 at 6:45 am
http://www.pitomnik-elita.ru/
MarthaGipsy · April 12, 2023 at 7:12 am
http://www.diamondcat.ru/
Deirdrewar · April 12, 2023 at 8:11 am
http://ranovosib.ru
valenlew · April 12, 2023 at 8:28 am
На сайте https://xn—-7sbbabo1bl0af5a0a4o.xn--p1ai/ вы сможете воспользоваться такой услугой, как поддержка бизнеса. Среди основных услуг: тендерные займы, юридическая поддержка, факторинг, лизинг легковых, грузовых автомобилей и другие. Работа на любых государственных площадках. Более 80% клиентов решили выбрать эту компанию в роли надежного и ответственного партнера. Каждый желающий получает возможность воспользоваться безупречным уровнем сервиса. Сотрудники знакомы со всеми тонкостями дела и подводными камнями.
Lizetteded · April 12, 2023 at 8:42 am
https://gpo2018.ru/
HeidiSpums · April 12, 2023 at 9:12 am
http://arcticland.ru
CharlesLoamy · April 12, 2023 at 3:36 pm
https://tlt.volga.news/
morielFut · April 12, 2023 at 7:48 pm
На сайте http://101shkaf.ru вы сможете приобрести фильтрующие рукава для пищевой промышленности. Они производятся из качественных, гипоаллергенных материалов, которые стойкие к регулярному использованию, истиранию, механическим воздействиям. А потому могут прослужить очень долго. Со всем ассортиментом ознакомьтесь на сайте. Продукция поставляется по доступным ценам и с оперативной доставкой. Очередное преимущество таких рукавов в том, что они экономичные. Создаются из текстурированных стеклянных нитей – они не бьются.
brianzopay · April 12, 2023 at 8:17 pm
Компания «Для рыбы» предлагает заказать все для удачной рыбалки. Имеются прикормки с самыми разными сильными ароматами. Воспользоваться ими можно независимо от времени года. В прикормки входят такие ингредиенты, как: перловая, пшенная крупы, подсолнечный жмых и другие компоненты. На сайте https://thaistar.ru/ ознакомьтесь с полным списком. Если и вы желаете приобрести качественную прикормку от производителя и в большом количестве, то скорей напишите на электронную почту.
mrpouMal · April 13, 2023 at 4:06 am
На сайте https://thaistar.ru/ вы сможете записаться на тайский массаж, а также спа-процедуры для женщин, мужчин и пар. Здесь также можно приобрести абонемент, подарочные сертификаты на определенную сумму для женщин, мужчин. В салоне трудятся компетентные, талантливые сотрудники, которые прошли специальное обучение, регулярно проходят повышение квалификации. Если вам необходима помощь специалистов, то напишите в чат, чтобы вам подобрали программу. Установлены привлекательные расценки.
WilliamSlevy · April 13, 2023 at 5:18 am
Предприятие СЗАО «СКВО» продолжает динамично развивать сельскохозяйственное производство в Зерноградском районе. Компания инвестирует в модернизацию основных средств — строительство новых корпусов в животноводческом секторе, закупку современной сельскохозяйственной техники и т. д.
Генеральный директор предприятия Анна Касьяненко отмечает, что компания продолжает придерживаться своей инвестпрограммы, несмотря на непростую экономическую ситуацию. https://www.kommersant.ru/doc/4879390
WilliamSlevy · April 13, 2023 at 6:56 am
Анна Касьяненко на страже СЗАО “СКВО”. Предприятие будет работать! Успешный бизнес на земле законных владельцев капитала пытаются развалить обиженные родственники и примкнувшие к ним “доброжелатели”.
https://fishki.net/photo/3135156-anna-kasyjanenko-na-strazhe-szao-skvo-predprijatie-budet-rabotaty.html
pharoKen · April 13, 2023 at 7:21 am
На сайте http://el96.ru вы сможете приобрести изысканный, красивый и привлекательный букет из самых разных цветов, включая строгие розы, тюльпаны, хризантемы. Все они свежие, выращены без использования химикатов. Все композиции создаются виртуозными и компетентными флористами, которые особенно скрупулезно трудятся над каждым букетом, отслеживают актуальные тенденции и притворяют их в жизнь. Вы получаете возможность заказать букет в любое время. Адресат его обязательно получит. Установлены приемлемые расценки.
Carolynisoky · April 13, 2023 at 10:35 am
http://www.keysvet.ru/
Bettyagold · April 13, 2023 at 11:03 am
http://камминс-сибирь.рф/
berhaamemi · April 13, 2023 at 11:07 am
Спортивный клуб «РоллерМания» приглашает детей и взрослых научиться катанию на роликах. На сайте https://roller-mania.ru/ вы сможете ознакомиться с расценками, а также временем, в течение которого будут длиться занятия. Каждый инструктор – это высококлассный эксперт, который научит вас всему, что знает сам. Можно заказать индивидуальные либо групповые занятия, которые помогут лучше освоить данную сферу и получить от уроков только приятные впечатления. Получите консультацию прямо сейчас.
DeloresAbese · April 13, 2023 at 11:30 am
http://missioner-nne.ru
eatmeDat · April 13, 2023 at 11:45 am
На сайте https://magazin-semena.by/ вы сможете приобрести качественные семена самых разных растений, в том числе, редких. Имеются и качественные средства для защиты растений, грунты, удобрения, а также саженцы. Предусмотрен раздел с лучшими предложениями, которые потребуются каждому садоводу. Регулярно в интернет-магазине устраиваются акции, действуют скидки. На сайте постоянно появляются новые товары, которые, возможно, пригодятся и вам. Вся продукция сертифицированная, проверенная, а потому обязательно принесет свои результаты.
rktimdyema · April 13, 2023 at 11:48 am
На сайте https://orenburg.zavodso.ru вы сможете заказать сварные ограждения, которые поставляются напрямую от производителя и по привлекательным ценам. Организуется оперативная доставка. Сотрудничество строго по договору как с физическими, так и юридическими лицами. Вы сможете заказать товары в любом объеме и прямо сейчас. При необходимости вам всегда предоставят консультацию, помогут сделать правильный выбор, дадут необходимые советы, чтобы вы подобрали именно то, что нужно.
Reginaprusa · April 13, 2023 at 11:57 am
http://igribakugan.ru
Dorcaszep · April 13, 2023 at 12:24 pm
http://fond-krymnash.ru
ZelmaThoxy · April 13, 2023 at 12:52 pm
http://seodzen.ru
Shirleytug · April 13, 2023 at 1:19 pm
http://yarshow.ru
Rufinalek · April 13, 2023 at 1:46 pm
http://djnil.ru
MeaganMoR · April 13, 2023 at 2:13 pm
http://5solnce.ru
ChelseyJem · April 13, 2023 at 2:40 pm
http://1001podelka.ru
Mariefloli · April 13, 2023 at 3:06 pm
http://perm-region.ru
MildredCep · April 13, 2023 at 3:33 pm
http://poshspice.ru
Dorothyadede · April 13, 2023 at 4:00 pm
http://www.piptur.ru/
PamelaBug · April 13, 2023 at 4:26 pm
http://vostok-cars.ru
CarrieWew · April 13, 2023 at 4:52 pm
http://www.tempvti.ru/
MarieCet · April 13, 2023 at 5:19 pm
http://4386.adminka.cc/
Juanainept · April 13, 2023 at 5:46 pm
http://8665.adminka.cc/
Cindanew · April 13, 2023 at 6:13 pm
http://5161.adminka.cc/
SoniaGlife · April 13, 2023 at 6:40 pm
http://8796.adminka.cc/
maetaDot · April 13, 2023 at 6:59 pm
На сайте http://1ekt.ru приобретите изысканные монобукеты или собранные из самых разных видов растений. Можно подобрать вариант, исходя из повода или праздника. К примеру, на 1 сентября, юбилей. В этой компании есть возможность заказать стильную и величественную композицию на свадьбу. Оперативная бесплатная доставка от часа, если вы сделаете заказ от 2000 рублей. В букете будут только свежие цветы, которые источают приятный аромат. Перед тем, как отправить букет получателю, будет выслано фото.
GlendaPiono · April 13, 2023 at 7:06 pm
http://4281.adminka.cc/
MildredSweme · April 13, 2023 at 7:32 pm
http://6316.adminka.cc/
eporunot · April 13, 2023 at 7:55 pm
На сайте https://www.uksor.ru/bukhgalterskoe_soprovozhdenie воспользуйтесь такой нужной для вас услугой, как бухгалтерское сопровождение бизнеса. Прибыль вашего предприятия будет увеличена при помощи правильной организации бизнеса, оптимизации всех процессов. Вам будут предоставлены все необходимые отчеты, качество контролируется на всех этапах работы. В компании работают профессиональные, высококлассные специалисты, знакомые со всеми нюансами. Воспользуйтесь бесплатной консультацией, чтобы разобраться в вопросе.
ltimaAparo · April 13, 2023 at 7:55 pm
На сайте https://www.parvenik.ru/ вы сможете приобрести все для приятного времяпрепровождения в бане. На портале вы найдете дубовые, березовые, эвкалиптовые и пихтовые веники, а также чаи для бани, травы в пучках и мешочках. Имеются и рукавицы, шапки, коврики, многое другое, что обязательно пригодится во время банных процедур. Есть специальный раздел, где вы сможете приобрести товары с огромными скидками. Дополнительно получится сэкономить, если введете специальный промокод. Ассортимент товара регулярно обновляется.
LillianTycle · April 13, 2023 at 7:59 pm
http://5366.adminka.cc/
ShariGlift · April 13, 2023 at 8:25 pm
http://7976.adminka.cc/
Dorothyzet · April 13, 2023 at 8:52 pm
http://7130.adminka.cc/
MinnieLidly · April 13, 2023 at 9:19 pm
http://2717.adminka.cc/
Sofiavef · April 13, 2023 at 9:46 pm
http://9008.adminka.cc/
cnarydDom · April 13, 2023 at 9:48 pm
На сайте https://himchistka-kovrov-kaluga.ru/ вы сможете заказать такую нужную услугу, как химчистка ковров при помощи высокотехнологичных, уникальных средств, которые помогут очистить даже самые стойкие, сильные загрязнения. Такой услугой необходимо обязательно воспользоваться в случае, если у вас есть маленькие дети, животные, при наличии пятен, которые не отстирываются. Специалисты сами заберут ваш ковер, после чего отдадут его свежим и чистым. Все манипуляции выполняются на высокоточном оборудовании и с применением уникальных технологий.
Carolbaill · April 13, 2023 at 10:12 pm
http://8361.adminka.cc/
bubbDup · April 13, 2023 at 10:15 pm
На сайте https://kazan.zavodso.ru закажите качественную и оригинальную продукцию, которая создается на заводе в течение длительного времени. Сотрудники компании отличаются огромным опытом, они знают, как правильно работать с металлом, а потому вы сможете приобрести сварные конструкции безупречного качества. Вы сможете доверить этой компании выполнение заказа различного уровня сложности. Каждое металлоизделие покрывается специальным составом, который предотвращает возникновение коррозии.
Terrynat · April 13, 2023 at 10:39 pm
http://5834.adminka.cc/
BrendaWeith · April 13, 2023 at 11:05 pm
http://6715.adminka.cc/
Ceceliagaith · April 13, 2023 at 11:31 pm
http://1243.adminka.cc/
Staceybed · April 13, 2023 at 11:58 pm
http://5065.adminka.cc/
MelanieNoive · April 14, 2023 at 12:24 am
http://2347.adminka.cc/
Nancydom · April 14, 2023 at 1:16 am
http://9340.adminka.cc/
Andy_tuh · April 14, 2023 at 1:20 am
офисное помещение после ремонта https://yborka-posle-remontov.ru/
KaitlyntiP · April 14, 2023 at 1:42 am
http://1987.adminka.cc/
Corinnejoild · April 14, 2023 at 2:08 am
http://5480.adminka.cc/
BonnieNoNge · April 14, 2023 at 2:34 am
http://4932.adminka.cc/
Laurablode · April 14, 2023 at 3:00 am
http://3486.adminka.cc/
FeltonDop · April 14, 2023 at 3:13 am
carsnow.net
KarenRow · April 14, 2023 at 3:26 am
http://7406.adminka.cc/
Elainenurse · April 14, 2023 at 3:53 am
http://1629.adminka.cc/
Melissaboops · April 14, 2023 at 4:19 am
http://3684.adminka.cc/
Etheltep · April 14, 2023 at 4:21 am
http://dstmarket.ru
ominfus · April 14, 2023 at 4:24 am
На сайте https://electrician-perm.ru/ вы сможете воспользоваться услугами компетентного и опытного электрика, который на профессиональном уровне и быстро произведет замену проводки в квартире. На это потребуется всего один день. Если и вам необходимы качественные услуги компетентного специалиста, то скорей обратитесь в эту компанию, где все работы выполняются по доступным ценам и в минимальные сроки. Во время выполнения работ учитываются все пожелания, на них предоставляются гарантии.
kamiklet · April 14, 2023 at 4:37 am
На сайте https://v-electronic.ru/ вы сможете приобрести телевизоры, аудио технику, гаджеты, смартфоны, ноутбуки, компьютеры, технику для домашнего пользования, оборудование для кухни и многое другое, что обязательно пригодится в ежедневной рутине. Вся продукция высокого качества, от лучших, надежных брендов, а потому прослужит долгое время, обрадует бесперебойной работой. Регулярное поступление новых товаров. Для всех желающих доступна оперативная доставка, а потому покупка приедет к вам очень быстро. Вся техника продается по доступным ценам.
DorisAwams · April 14, 2023 at 4:45 am
http://2002.adminka.cc/
BrandyDrory · April 14, 2023 at 4:58 am
http://altzodchestvo.ru
NeldaNuari · April 14, 2023 at 5:11 am
http://1578.adminka.cc/
ClaraFraut · April 14, 2023 at 5:36 am
https://raki-rossii.ru/
JessicaRuity · April 14, 2023 at 5:38 am
http://8392.adminka.cc/
BillieFup · April 14, 2023 at 6:05 am
http://9483.adminka.cc/
CindyDic · April 14, 2023 at 6:14 am
https://ticsp.ru/
ochkaDrime · April 14, 2023 at 6:14 am
Сайт http://www.shikardos.site/ представляет собой универсальный и уникальный сервис, который участвует в поисках упоминаний в социальных сетях, а также блогах, форумах, онлайн-сми. Вы сможете воспользоваться одной услугой либо целым комплексом: поиск клиентов, мониторинг упоминаний, отслеживание групп. Все функции являются очень значимыми, интересными и нужными. А потому точно помогут вам раскрутить бизнес, повысить качество услуг. Ознакомьтесь с тарифами, информацией о проекте и партнеркой.
Dorothyerepe · April 14, 2023 at 6:31 am
http://7733.adminka.cc/
Amandabub · April 14, 2023 at 6:53 am
http://avtoklass-22.ru
BeverlyTus · April 14, 2023 at 6:57 am
http://4383.adminka.cc/
JeanneVah · April 14, 2023 at 7:23 am
http://9448.adminka.cc/
SuzannVeicy · April 14, 2023 at 7:34 am
https://sweetbabyswim.ru/
yevdmfleld · April 14, 2023 at 7:41 am
На сайте https://www.uksor.ru/bukhgalterskoe_obsluzhivanie_moscow закажите консультацию для того, чтобы воспользоваться профессиональным бухгалтерским обслуживанием, что поможет повысить рентабельность бизнеса и получить неплохой доход. Есть возможность воспользоваться комплексной услугой, на которую будет предоставлена скидка. В компании действуют приемлемые цены, а потому воспользоваться услугами сможет каждый. Вас ожидает своевременная отправка отчетности. При необходимости воспользуйтесь консультацией для бухгалтеров, юристов.
Scottadary · April 14, 2023 at 7:42 am
На сайте https://na-more-v-crimea.ru/ вы сможете получить всю необходимую информацию, которая касается поездки на море в Крым. Вы узнаете о природе, истории Крыма, а также кухне, курортах. Описаны интересные и любопытные направления, маршруты, имеются памятники древности. На сайте рассматривается информация про дикие пляжи, куда стоит отправиться для того, чтобы посмотреть окрестности, различные достопримечательности и просто весело провести время. Имеется информация о целебных грязях Крыма, про аренду жилья, важные памятки.
Sarahwreno · April 14, 2023 at 8:43 am
http://3276.adminka.cc/
BaileySesty · April 14, 2023 at 8:51 am
http://mikstudio.ru
Kiratuh · April 14, 2023 at 9:03 am
порно гиг порно
MaryannLox · April 14, 2023 at 9:08 am
http://4867.adminka.cc/
AdellNeala · April 14, 2023 at 9:29 am
http://traftip.ru
RobertaMut · April 14, 2023 at 9:35 am
http://3597.adminka.cc/
Beverlylok · April 14, 2023 at 10:01 am
http://2634.adminka.cc/
TarynClurn · April 14, 2023 at 10:09 am
http://bristol-pub.ru
JamesFup · April 14, 2023 at 10:26 am
казино пин ап
RandyAcene · April 14, 2023 at 10:38 am
And thirdly, when choosing toys, it is important to travelusanews.com</a give preference to unique products that will not be found among friends and acquaintances.
StellaImalk · April 14, 2023 at 10:48 am
http://oko777.ru
Chrisglymn · April 14, 2023 at 10:55 am
http://7654.adminka.cc/
Albinasaunk · April 14, 2023 at 11:21 am
http://7224.adminka.cc/
SandyUsase · April 14, 2023 at 11:30 am
http://freeartnsk.ru
CrystalPhirm · April 14, 2023 at 11:47 am
http://5741.adminka.cc/
HelenZep · April 14, 2023 at 12:13 pm
http://7036.adminka.cc/
AnnieNaiva · April 14, 2023 at 12:40 pm
http://7419.adminka.cc/
Wandalouck · April 14, 2023 at 12:46 pm
http://elita-int.ru
nciarBolla · April 14, 2023 at 12:59 pm
На сайте https://axios-macro.com/ вы сможете заказать приватные макросы для apex legends, pubg. Они не являются читом, считаются абсолютно безопасными, поэтому их можно использовать в любой игре, чтобы получить больше функций, возможностей. Вы можете попробовать все опции уже сейчас либо обновить имеющийся вариант. Макросы берут под контроль отдачу, не внедряются в память. И самое важное, что отсутствуют последствия от администрации в виде бана. В одной подписке имеются макросы для самых разных игр.
Brendagrice · April 14, 2023 at 1:07 pm
http://4442.adminka.cc/
FrankMal · April 14, 2023 at 1:25 pm
moneytimenews.com
MarieChada · April 14, 2023 at 1:26 pm
http://kuzov-kaluga.ru
GraceCreds · April 14, 2023 at 1:33 pm
смотреть порно онлайн бесплатно
megacsom · April 14, 2023 at 1:42 pm
На сайте https://shibainu-japan.ru/ вы сможете забронировать щенка Сиба Ину. Собаки выращиваются на натуральной еде, с заботой и лаской. Именно поэтому они очень преданы хозяевам, любят дом, общаться с другими членами семьи. Собаки такой породы становятся отличным компаньоном, другом и товарищем. Они отлично уживаются не только с человеком, но и другими пушистыми друзьями. Во время проживания в питомнике собаки много бегают и двигаются, чтобы развить мышечную массу. Вы сможете ознакомиться с собаками прямо сейчас, изучив фотогалерею.
FrancisSlees · April 14, 2023 at 1:59 pm
http://5010.adminka.cc/
Lorettaavarf · April 14, 2023 at 2:04 pm
http://www.allnhatrang.ru/
JoycePrano · April 14, 2023 at 2:26 pm
http://9067.adminka.cc/
Bettytah · April 14, 2023 at 2:45 pm
http://paralaxnsk.ru
Kathytuh · April 14, 2023 at 2:53 pm
http://6474.adminka.cc/
HeatherTalia · April 14, 2023 at 3:21 pm
http://2608.adminka.cc/
Helenjuids · April 14, 2023 at 3:23 pm
http://ssmp-novoros.ru
LindaGap · April 14, 2023 at 3:48 pm
http://8186.adminka.cc/
Audreywaice · April 14, 2023 at 4:03 pm
http://referent-zar.ru
HeidiCausE · April 14, 2023 at 4:15 pm
http://8703.adminka.cc/
SherylMeelf · April 14, 2023 at 4:41 pm
http://4307.adminka.cc/
SuzanneNeple · April 14, 2023 at 4:43 pm
http://sfygroup.ru
SandraKet · April 14, 2023 at 5:08 pm
http://9071.adminka.cc/
CindyGodia · April 14, 2023 at 5:22 pm
http://zhiznugra.ru
asaviPlawn · April 14, 2023 at 5:32 pm
На сайте https://travellis.ru/ вы сможете получить всю необходимую информацию, которая касается путешествий. Так имеются данные о том, какие нюансы есть при аренде автомобиля за рубежом. Имеются материалы про экзотическую кухню Индонезии. Кроме того, есть информация про самые интересные места Индонезии, куда стоит отправиться, про достопримечательности, которые необходимо обязательно посмотреть. Вы узнаете про то, как применять грязелечение, его историю. Есть раздел с полезными статьями для туристов, путешественников, которые планируют поездку.
Lindarob · April 14, 2023 at 5:34 pm
http://7861.adminka.cc/
JamesFup · April 14, 2023 at 6:00 pm
пин ап официальный сайт
MelissapHile · April 14, 2023 at 6:01 pm
https://glow-agens.ru/
DavidAdves · April 14, 2023 at 6:39 pm
If it is still not clear, it remains to look at the ready-made answer dalycitynewspaper.com, re-read the solution and try to understand how it was received.
Juliavex · April 14, 2023 at 6:41 pm
http://fs-vozduh.ru
brokoVed · April 14, 2023 at 7:13 pm
На сайте https://forexvision.ru/help/instruktsiya-kak-vyvesti-dengi-s-brokera вы сможете изучить такую важную и нужную информацию, которая касается того, как вывести деньги с брокера. Статья содержательная, наглядная, имеется даже схема, которая поможет лучше понять информацию и сделать именно так, как необходимо. Описываются случаи, при которых виноватым является самым брокер и то, какие трудности возникают при выводе средств. Кроме того, имеется информация о том, нужно ли брать кредит для торговли.
CynthiaFug · April 14, 2023 at 7:19 pm
http://hd-clip.ru
Aliceerype · April 14, 2023 at 7:58 pm
http://lastochkasad.ru
RebeccaBep · April 14, 2023 at 8:36 pm
http://faynburg-perm.ru
Pattyraisk · April 14, 2023 at 9:15 pm
https://www.lawyer-nsk.ru/
wingstauth · April 14, 2023 at 9:18 pm
На сайте http://www.xn—57-fddotkqrbwclei3a.xn--p1ai/ вы сможете заказать такую нужную и важную услугу, как уничтожение насекомых при помощи тумана. Такой метод считается очень эффективным в борьбе с непрошенными гостями, но при этом не приносит вреда человеку, домашним питомцам. Не потребуется повторная обработка за счет того, что состав работает мощно и бьет точно в цель. Вызовете специалиста в наиболее комфортное время. Компания находится на рынке более 12 лет, за которые успешно выполнила огромное количество проектов.
teadyjam · April 14, 2023 at 10:23 pm
На сайте https://samray.ru/ вы сможете получить контакты копицентра и типографии в Москве. Компания работает по удобному графику, а потому воспользоваться услугами можно в любое время. Среди основных услуг выделяют: печать чертежей, листовок, авторефератов, баннеров, буклетов, календарей, фотографий, документов. Возможна брошюровка документов. Перед тем, как приступить к работе, в обязательном порядке рассчитывается стоимость. Происходит подготовка макета. На следующем этапе осуществляется оплата вашего заказа именно так, как удобно – наличным либо безналичным расчетом. Заказ будет выполнен в оговоренные сроки.
belkanep · April 15, 2023 at 3:25 am
На сайте http://aviator.com.ru/ вы сможете сыграть в интересную, удивительную и захватывающую игру Aviator, которая подарит исключительно приятные, радостные впечатления. Важным моментом является то, что у вас появится возможность получить крупный выигрыш в случае победы. В этой игре нет ничего сложного. Она проста в понимании, а потому сыграть в нее сможет каждый желающий. Игра отличается огромным количеством полезных и нужных опций, которые сделают ее более зрелищной и головокружительной.
twittydom · April 15, 2023 at 3:36 am
На сайте https://russian-sports.ru/ вы сможете получить всю необходимую информацию, которая касается занятий спортом. Вы узнаете о координации движений, о том, кто такой стрингер, про тейпирование пальцев. Имеются любопытные данные о хоккее, прозвища футболистов и многое другое. Все статьи написаны экспертами каждого вида спорта, а потому можете не сомневаться в качестве данного материала. Регулярно публикуются новые данные, которые помогут лучше разобраться в этом вопросе. Заходите сюда постоянно, чтобы почерпнуть что-то новое.
firebonef · April 15, 2023 at 5:35 am
На сайте https://krasiva-i-lubima.ru вы сможете ознакомиться с любопытными, интересными статьями, которые посвящены уходу за собой. Вы узнаете лайфхаки, которые помогут быстро справляться с различными домашними делами. Вместе с тем, описываются кулинарные рецепты, которые помогут быстро приготовить вкусную, ароматную пищу любым способом. Есть советы от профессионалов по правильному содержанию комнатных растений, уходу за ними. В одной из рубрик вы найдете статьи о том, как создавать что-то своими руками, публикации, посвященные рукоделию.
epoweTaf · April 15, 2023 at 5:43 am
На сайте https://aytour.ru/ представлены отели, гостевые дома, санатории, пансионаты, которые можно забронировать для отдыха всей семьей. Наиболее популярными направлениями являются: Алтайский край, Подмосковье, Костромская область, Краснодарский край. Перед вами самые комфортабельные, просторные отели, которые идеально адаптированы под потребности гостей. Здесь вы сможете подобрать отель, санаторий и все, что вам нужно. Рассчитать стоимость путевки можно сейчас, введя подробную информацию в соответствующую форму.
DavidJab · April 15, 2023 at 6:30 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение химчистке мягкой мебели
DavidJab · April 15, 2023 at 7:16 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
клининговая компания видео
DavidJab · April 15, 2023 at 7:35 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
химчистка ковров обучение
DavidJab · April 15, 2023 at 8:06 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
клининговые курсы
DavidJab · April 15, 2023 at 8:52 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
клининг обучение для начинающих видео уроки
DavidJab · April 15, 2023 at 9:13 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
клинер курсы
DavidJab · April 15, 2023 at 10:34 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
химчистка мебели обучение
DavidJab · April 15, 2023 at 11:22 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение уборке квартир
DavidJab · April 15, 2023 at 12:07 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
обучение клинингу бесплатно видео уроки
DavidJab · April 15, 2023 at 12:27 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
бесплатные курсы клининга
DavidJab · April 15, 2023 at 12:58 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы по химчистке мягкой мебели
mrcooMow · April 15, 2023 at 1:17 pm
На сайте http://plinko.bingo/ вы отыщите огромный выбор интересных, увлекательных игр, каждая из которых отличается своим уникальным стилем, необычным дизайном, а также особыми правилами. Здесь же вы узнаете и о том, что собой представляет игра Плинко. Вы узнаете и о том, как правильно играть в казино, о его правилах. Имеется абзац, который посвящен тому, почему эта игра настолько популярна. Каждый найдет что-то для себя в этой игре интересное и родное, а потому вы захотите играть в нее постоянно.
DavidJab · April 15, 2023 at 1:43 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение уборке
charoreise · April 15, 2023 at 2:00 pm
На сайте https://ack-group.ru/ вы сможете воспользоваться консультацией опытного и талантливого психолога. Он поможет проработать ваши проблемы, понять себя, сделать так, чтобы вы избавились от большинства проблем. Как раз сейчас для новых клиентов действуют акции, особые условия, которые помогут воспользоваться услугой и при этом неплохо сэкономить. Психологи помогут вам разобраться в себе и получить адекватную оценку своим действиям. Запишитесь к психологу сейчас, чтобы справиться с проблемами.
DavidJab · April 15, 2023 at 2:03 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение методам уборки
DavidJab · April 15, 2023 at 2:33 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
скачать курс по клинингу
DavidJab · April 15, 2023 at 3:16 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
обучение уборке квартир
DavidJab · April 15, 2023 at 3:34 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курс обучения клинингу
DavidJab · April 15, 2023 at 4:04 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
бесплатные курс клининга онлайн
DavidJab · April 15, 2023 at 4:46 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение профессиональной уборке
DavidJab · April 15, 2023 at 5:05 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение уборке помещений
DavidJab · April 15, 2023 at 5:35 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
клининговые услуги обучение
DavidJab · April 15, 2023 at 6:19 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
видео курсы по клинингу
DavidJab · April 15, 2023 at 6:38 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
обучение химчистке мягкой мебели и ковров
Williamgen · April 15, 2023 at 6:57 pm
https://saitotziv.ru/ustrong-otzivi
DavidJab · April 15, 2023 at 7:08 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
обучение клинингу онлайн бесплатно в хорошем
DavidJab · April 15, 2023 at 7:50 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы по уборке квартир
DavidJab · April 15, 2023 at 8:38 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курсы уборки по дому
DavidJab · April 15, 2023 at 9:18 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
курс обучения клинингу
DavidJab · April 15, 2023 at 9:35 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курсы по химчистке мягкой мебели
DavidJab · April 15, 2023 at 10:02 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы по клинингу
zeropVox · April 15, 2023 at 10:19 pm
На сайте https://lilibum.ru вы сможете познакомиться с интересными людьми, завести новые знакомства, отыскать единомышленников, назначить свидание и даже найти свою вторую половинку для серьезных отношений. Общайтесь через переписку, назначайте свидание и делитесь впечатлениями от общения. Вы сможете найти того, кто вам интересен в своем городе, либо другом, чтобы затем приехать к нему в гости. Загружайте, делитесь фото, обменивайтесь сообщениями. Для этого необходимо пройти регистрацию.
DavidJab · April 15, 2023 at 10:42 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
уроки клининга видео
infectusent · April 15, 2023 at 10:50 pm
На сайте https://ack-group.ru/psikhologicheskie-uslugi/konsultatsiya-psikhologa-individualnaya/ вы сможете ознакомиться с расценками на услуги психолога. Кроме того, имеется необходимая информация, касающаяся того, в каких случаях необходимо обращаться к специалисту, какие проблемы он поможет вам решить и сколько по времени займет сеанс. Имеются и другие важные данные, которые помогут быстрее разобраться в ситуации. Психолог поможет вам в любом случае, даже независимо от его сложности. Как раз сейчас на услуги действуют скидки.
DavidJab · April 15, 2023 at 10:58 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
обучение методам уборки
starletkem · April 15, 2023 at 11:12 pm
На сайте https://rosszem.ru/ ведется продажа земельных участков в Московской области, в коттеджных поселках. Для того чтобы быстрее определиться с выбором, необходимо изучить карту, на которой находятся все деревни, поселки и дачи. Перед вами большой выбор участков, приобрести которые вы сможете сейчас. В некоторых поселках их осталось не так много, а потому спешите сделать свой выбор. Напротив каждого объекта имеется стоимость в рублях за сотку. Есть такие объекты, которые только начали сдаваться.
DavidJab · April 15, 2023 at 11:24 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
клинер курсы
DavidJab · April 16, 2023 at 12:03 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
обучение уборке помещений
DavidJab · April 16, 2023 at 12:20 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
школа клининга
DavidJab · April 16, 2023 at 12:46 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
программа обучения химчистки
DavidJab · April 16, 2023 at 1:26 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
клининговые курсы
DavidJab · April 16, 2023 at 1:43 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение химчистке мебели
wooodfed · April 16, 2023 at 2:23 am
Сайт https://cpa-1.top/en представляет собой международную партнерскую сеть CPA. Она оказывает содействие в том, чтобы помочь рекламодателям соответствовать важным показателям, а заодно повысить рентабельность инвестиций, монетизировать трафик. Компания активно сотрудничает с предприятиями по всему миру и достаточно продолжительное время. Вот почему вы можете доверять опыту и воспользоваться услугами в любое время. Вы получите тот результат, который требуется. Компания отличается огромным набором ресурсов для реализации самых сложных проектов.
DavidJab · April 16, 2023 at 2:49 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
книги обучение клинингу
DavidJab · April 16, 2023 at 3:05 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
обучение по клинингу и уборке
DavidJab · April 16, 2023 at 3:30 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение клинингу бесплатно
DavidJab · April 16, 2023 at 4:24 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы менеджер клининга
DavidJab · April 16, 2023 at 4:51 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение клинингу бесплатно видео уроки
DavidJab · April 16, 2023 at 5:31 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
профессиональный клининг обучение
DavidJab · April 16, 2023 at 5:47 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
химчистка ковров обучение
DavidJab · April 16, 2023 at 6:13 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение клинингу бесплатно
EdwardTab · April 16, 2023 at 6:41 am
Портал https://lugaland.com/ предлагает ознакомиться с самой актуальной, любопытной информаций, которая обязательно будет вам интересна. Есть как эксклюзивный контент, так и статьи, фотографии, которые будут интересны всем, вызовут ажиотаж и приковывают к себе внимание неординарной подачей материала. Все статьи достоверные, написаны лучшими авторами, которые знают, чем заинтересовать публику. Имеются материалы на следующие темы: забавные животные, о тех вещах, которые всем кажутся нормальными, но только не в Северной Корее.
DavidJab · April 16, 2023 at 6:52 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курс химчистки мебели
DavidJab · April 16, 2023 at 7:36 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
ютуб клининг
DavidJab · April 16, 2023 at 8:17 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
клининг менеджер обучение
DavidJab · April 16, 2023 at 8:34 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курс уборка квартиры
DavidJab · April 16, 2023 at 8:59 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
школа клининга
luxutiusedy · April 16, 2023 at 9:10 am
На сайте https://stavkomaniya.ru ознакомьтесь с легальными букмекерскими конторами, которые вызывают доверие, работают точно и прозрачно. А самое главное, что никогда не обманывают своих клиентов, выплачивают деньги в случае выигрыша. Рейтинг составлен истинными профессионалами, которые знают, по каким критериям необходимо оценивать БК. В рейтинге представлены те конторы, которые заслуживают внимания. Рассматриваются их плюсы, минусы, особенности. Рейтинг регулярно обновляется, чтобы предложить вам только свежие, точные данные.
elishascuff · April 16, 2023 at 9:35 am
На сайте https://omsk.zavodso.ru закажите производство и монтаж сварных ограждений в Омске от производителя. Действует оперативная доставка, установлены доступные цены. Работа происходит точно по договору с физическими, юридическими лицами. Представлена собственная линия полимерно-порошковой окраски. Все работы выполняются напрямую, отсутствует посредничество, что позволило установить доступные цены. Прямо сейчас вы можете получить каталог продукции. Перед тем, как сделать окончательный выбор, пройдите тест.
DavidJab · April 16, 2023 at 9:40 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение клинингу
DavidJab · April 16, 2023 at 9:58 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курсы клиринга
DavidJab · April 16, 2023 at 10:28 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
клининг пособие
DavidJab · April 16, 2023 at 11:09 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
клининговая компания обучение
DavidJab · April 16, 2023 at 11:26 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
обучение химчистке мебели
DavidJab · April 16, 2023 at 11:55 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
технолог в клининге обучение
DavidJab · April 16, 2023 at 12:40 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
видео уборки клининговой компании
phantShole · April 16, 2023 at 12:51 pm
На сайте https://profpotolki.kz/ вы сможете оставить заявку на установку натяжных потолков. Они создаются из материалов высокого качества, которые не выцветают и не синтезируют в воздух вредных, потенциально опасных веществ. Еще и прослужат очень долго. И самое главное, что они отлично впишутся в любой дизайн, станут его основной деталью. Мастера виртуозно установят потолок, освещение различной сложности, создадут уникальный проект. Установка происходит в минимальные сроки и в соответствии с жесткими требованиями.
DavidJab · April 16, 2023 at 1:00 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
бесплатные курсы клининга
DavidJab · April 16, 2023 at 1:29 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
клининговая школа
DavidJab · April 16, 2023 at 3:02 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
химчистка курсы обучения
RobertSum · April 16, 2023 at 3:07 pm
Банкротство физических лиц
drangrax · April 16, 2023 at 3:08 pm
На сайте https://chatgpt-telegram.com вы сможете узнать всю необходимую информацию о CHATGPT – программе, которая заполучила популярность во всем мире. Это искусственный интеллект, который умеет распознавать тексты, генерировать их и даже писать дипломные работы. Но теперь пользоваться им смогут и все россияне. Для этих целей необходимо лишь зайти на сайт, после чего вы получите доступ ко всем функциям. Начните использовать все возможности нейросети. И самое главное, что это бесплатно.
DavidJab · April 16, 2023 at 3:42 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение клинеров
DavidJab · April 16, 2023 at 4:00 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение уборке квартир
DavidJab · April 16, 2023 at 4:31 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
химчистка диванов обучение
DavidJab · April 16, 2023 at 5:15 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
клинер курсы
DavidJab · April 16, 2023 at 5:34 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
программа обучения химчистки
DavidJab · April 16, 2023 at 6:03 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курсы по клинингу
kristinCrype · April 16, 2023 at 6:22 pm
На сайте https://novyediety.ru/ почитайте информацию, касающуюся диет, правильного питания и того, как худеют звезды без вреда для организма. Все схемы питания подобраны так, чтобы удовлетворить потребности организма. И самое важное, что вы обязательно подберете для себя такую методику, которая точно будет работать и с учетом предпочтений. Есть клубничная диета, магическая, финиковая, а также авторские методики похудения, которые помогут сбросить вес и заполучить фигуру мечты.
waldoMoorb · April 16, 2023 at 6:24 pm
На сайте https://novosibirsk.zavodso.ru вы сможете заказать сварные ограждения безупречного качества. Завод в течение длительного времени занимается производством, реализацией, монтажными работами конструкций. Все работы выполняются на высоком профессиональном уровне. Услуги оказываются напрямую, без посредников, а потому цены остаются доступными. Для того чтобы подобрать оптимальный вариант, необходимо пройти небольшой тест. Предприятие существует на рынке с 2020 года.
DavidJab · April 16, 2023 at 6:46 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
обучение уборке дома
DavidJab · April 16, 2023 at 7:06 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
клининг менеджер обучение
ndersbib · April 16, 2023 at 7:11 pm
На сайте https://xn—-7sbbazzcf0azx6d.xn--p1ai/ вы сможете записаться на пробный урок каратэ в школу «Косики-Каратэ». Занятия абсолютно безопасные и проходят для детей от 5 лет, в наиболее удобное время, чтобы ребенок смог спланировать свой график. Уроки проводят лучшие учителя, которые отличаются огромным опытом, постоянно развиваются и обучают детей тонкостям искусства. Вы можете записаться к любому преподавателю по обозначенному номеру телефона. Это позволит вам овладеть всем необходимыми навыками.
DavidJab · April 16, 2023 at 7:36 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
видео уборки клининговой компании
DavidJab · April 16, 2023 at 8:18 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
профессиональная уборка обучение
DavidJab · April 16, 2023 at 8:37 pm
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
курсы по химчистке мебели и ковров
DavidJab · April 16, 2023 at 9:44 pm
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение химчистке
DavidJab · April 16, 2023 at 10:02 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
школа клининга
DavidJab · April 16, 2023 at 10:27 pm
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
клинер курсы
DavidJab · April 16, 2023 at 11:06 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
клининг обучение для начинающих
okielobus · April 16, 2023 at 11:12 pm
На сайте https://www.ladywinner.com/ вы сможете ознакомиться с интересными, полезными статьями, которые помогут взглянуть на привычные вещи под другим углом. Имеются статьи про селебрити, а также про то, какие мультики обязательно необходимо посмотреть каждой женщине, любопытные статьи, связанные с воспитанием ребенка. Есть рекомендации, которые помогут избежать возникновения конфликтов в семье. Контент сопровождается картинкой, которая поможет лучше понять и усвоить тему. Регулярно появляются новые статьи, которые будут интересны и вам.
bunbuSew · April 16, 2023 at 11:32 pm
На сайте https://petryaj.ru вы сможете заказать качественную, практичную и удобную амуницию. Она не доставляет дискомфорта животным и считается плодом разработок компетентных инженеров. Важным достоинством амуниции является то, что она отличается наличием дополнительного слоя. Он не травмирует нежную кожу, а, наоборот, защищает ее. Амуниции разрабатывают в контакте с кинологами, которые знают о собаках и их строении все. Представлен большой ассортимент, способный удовлетворить предпочтения самого взыскательного потребителя.
DavidJab · April 16, 2023 at 11:46 pm
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
курс уборка квартиры
DavidJab · April 17, 2023 at 12:25 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
онлайн школа клининга
DavidJab · April 17, 2023 at 12:42 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
профессиональная уборка обучение
DavidJab · April 17, 2023 at 1:45 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
генеральная уборка курс
DavidJab · April 17, 2023 at 2:01 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы по химчистке мебели и ковров
DavidJab · April 17, 2023 at 2:26 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
химчистка мебели обучение
DavidJab · April 17, 2023 at 3:05 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
курс обучения клинингу
margetEf · April 17, 2023 at 3:12 am
ООО «Завод сварных ограждений» предлагает заказать сварные конструкции по самым доступным, привлекательным ценам. На сайте https://perm.zavodso.ru вы сможете ознакомиться со всей номенклатурой, которая доступна для заказа прямо сейчас, в любое время. На заводе установлены привлекательные цены, действует оперативная доставка. Сотрудничество происходит на официальной основе, точно по договору. Менеджеры компании сориентируют вас по срокам, а также ценам. Дополнительно подберут схему продукта, а также подходящий материал.
DavidJab · April 17, 2023 at 3:51 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
клининг менеджер обучение
DavidJab · April 17, 2023 at 4:36 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение клинингу онлайн бесплатно
hinshCaund · April 17, 2023 at 5:04 am
На сайте https://serialexpress.ru вы сможете приобрести сериалы на ДВД-дисках в хорошем качестве и прямо сейчас. Теперь нет необходимости ожидать, пока выйдет любимая серия. Можно просто включить ее на том моменте, где остановились вчера. Важно то, что все фильмы отличного качества, представлены в огромном ассортименте, что позволит подобрать решение с учетом предпочтений. Имеется информация о магазине, а также интересные тематические новости. Сериалы приходят с красивым оформлением, а потому идеально подходят в качестве презента.
DavidJab · April 17, 2023 at 5:21 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
курсы клининга бесплатно
timedIteve · April 17, 2023 at 5:41 am
На сайте https://samray.ru/ оставьте заявку на то, чтобы воспользоваться услугами копировального центра, где работают высококлассные, опытные специалисты с огромным стажем. Вы сможете заказать такие услуги, как печать листовок, чертежей, а также авторефератов. Все услуги отличаются доступной, привлекательной стоимостью. Заказ выполняется в минимальные сроки, независимо от объема. Используются качественные, практичные материалы, которые не потеряют своего вида, не потускнеют.
DavidJab · April 17, 2023 at 6:24 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
обучение клинингу онлайн
Sandydycle · April 17, 2023 at 6:39 am
http://4703.adminka.cc/
DavidJab · April 17, 2023 at 6:52 am
Добро пожаловать на наш обучающий курс “Как открыть клининговую компанию с нуля”. Если вы хотите создать свой бизнес и зарабатывать на услугах по уборке и чистке, то наш курс поможет вам сделать первые шаги.
Здесь вы узнаете:
– Как выбрать потенциальную аудиторию и определить свое место на рынке
– Как составить бизнес-план и определить уровень инвестиций для начала работы
– Какие разрешения и сертификаты необходимы для работы в сфере клининга
– Как подобрать персонал и организовать работу бригады
– Как раскрутить свой бизнес и привлечь клиентов
По окончании курса вы будете иметь точное понимание о том, как открыть свою клининговую компанию, и ответы на все ваши вопросы. Наш опытный инструктор поможет вам увидеть всю картину и дать необходимые знания для успешного запуска вашего бизнеса.
клининг обучение для начинающих видео уроки
AmandaDiz · April 17, 2023 at 7:08 am
http://3749.adminka.cc/
OliveJal · April 17, 2023 at 7:36 am
http://5571.adminka.cc/
DavidJab · April 17, 2023 at 7:38 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
обучение химчистке
anarxnal · April 17, 2023 at 7:50 am
На сайте https://centr-metrologii-novosibirsk.ru/ вы сможете составить заявку на то, чтобы выполнить поверку счетчиков воды и тепла. В назначенное время приедет специалист, чтобы произвести поверку счетчиков. Работа проводится без снятия аппарата, деформации. На нее уйдут не более 20 минут. Специалист прибудет тогда, когда удобно вам. Вы получите все необходимые документы на руки. Стоимость услуги остается доступной. Все работы выполняются согласно нормативам, по ГОСТу. Эта компания является аккредитованной, лицензированной.
DavidJab · April 17, 2023 at 7:57 am
Хотите научиться открывать клининговую компанию с нуля и стать успешным предпринимателем? Тогда наш обучающий курс – это то, что Вам нужно!
На курсе Вы познакомитесь с основными этапами создания и развития клининговой компании: от выбора направления деятельности и формирования бизнес-плана до продвижения вашей компании на рынке и организации работы с сотрудниками.
Вы научитесь оценивать рынок, определять своих конкурентов, анализировать их преимущества и недостатки. Вы также узнаете, как установить цены на свои услуги, продвигаться в социальных сетях и работать с клиентами.
Кроме того, мы расскажем Вам, как правильно рекламировать свою компанию и создать качественный сайт для привлечения клиентов. Вы получите ответы на вопросы о том, как работать с клиентами и управлять коллективом, а также узнаете проэтику расторжения договоров и подбора новых клиентов.
В нашей команде представлены профессионалы в области маркетинга и предпринимательства, которые помогут Вам в процессе обучения. Не упустите возможность стать успешным предпринимателем в сфере клининга!
курсы химчистки
DavidJab · April 17, 2023 at 8:29 am
Обучение клинингу курс – это отличная возможность для тех, кто хочет развиваться в этой профессии. На курсе вы сможете узнать все тонкости: «Как открыть Клининговую компанию с нуля», множество полезных знаний, которые помогут вам эффективно и быстро запустить свой бизнес. Благодаря обучению, вы сможете повысить свою квалификацию и стать востребованным специалистом в области клининга.
обучение уборке дома
Sarahempah · April 17, 2023 at 8:32 am
http://3440.adminka.cc/
Thelmarit · April 17, 2023 at 9:00 am
http://6847.adminka.cc/
HelenLek · April 17, 2023 at 9:28 am
http://8217.adminka.cc/
buptynuh · April 17, 2023 at 9:50 am
На сайте https://hamachivpn.ru/ имеется информация, которая посвящена LogMein Hamachi. Представляет собой программу, которая дает возможность создавать локальную сеть для того, чтобы объединить компьютеры самых разных стран, городов. Hamachi необходима для того, чтобы вместе с друзьями играть в самые разные, увлекательные игры, включая и те случаи, при которых официальные сервера игры являются заблокированными. Программа позволяет в удаленном режиме управлять тем компьютером, который находится с вами в одной сети.
TheresaTem · April 17, 2023 at 9:56 am
http://7100.adminka.cc/
CandyKah · April 17, 2023 at 10:24 am
http://6224.adminka.cc/
RebeccaSwado · April 17, 2023 at 10:51 am
http://7256.adminka.cc/
Sylviaflums · April 17, 2023 at 11:18 am
http://3764.adminka.cc/
RobertSum · April 17, 2023 at 11:35 am
Банкротство физлиц
GladysDurse · April 17, 2023 at 11:46 am
http://6076.adminka.cc/
Vernasof · April 17, 2023 at 1:14 pm
http://3483.adminka.cc/
MeghanShuby · April 17, 2023 at 1:44 pm
http://6975.adminka.cc/
akirHurge · April 17, 2023 at 1:57 pm
На сайте https://expfit.ru/ вы получите информацию, которая касается того, как правильно питаться, чтобы скинуть вес, каким образом накачать ноги девушке. Есть все об упражнениях, которые помогут накачать грудь, сделать организм выносливым. Есть меню, которое поможет обрести фигуру мечты. А еще опубликован комплекс упражнений для тонкой талии, избавления от живота. И самое главное, что все программы действительно работающие, они помогут обрести красивые мышцы, рельеф. Обязательно почитайте полезные статьи, которые помогут быстро прийти в форму.
Anitafuh · April 17, 2023 at 2:13 pm
http://7602.adminka.cc/
Tiffanytum · April 17, 2023 at 2:44 pm
http://8897.adminka.cc/
RobertSum · April 17, 2023 at 2:51 pm
Банкротство
AngelaMer · April 17, 2023 at 4:13 pm
http://2102.adminka.cc/
JohnnieOvarm · April 17, 2023 at 4:44 pm
http://9444.adminka.cc/
MahaliaBoK · April 17, 2023 at 5:14 pm
http://6117.adminka.cc/
stonewvok · April 17, 2023 at 5:37 pm
На сайте https://filethor.com/ вы сможете воспользоваться уникальными программами, которые гарантируют оперативную загрузку ПО для Windows. Для того чтобы найти то, что необходимо, просто вбейте название в специальную поисковую строку. Есть раздел с последними выпусками ПО, а также самыми популярными загрузками. Обязательно посетите раздел с браузерами и плагинами. Есть и антишпионское ПО, музыкальные файлы и многое другое, что обязательно вам понравится. Заходите сюда регулярно, чтобы ознакомиться со всей необходимой информацией.
BettyUnolo · April 17, 2023 at 6:14 pm
http://1643.adminka.cc/
Lindsayhed · April 17, 2023 at 6:44 pm
http://1197.adminka.cc/
PaulaDab · April 17, 2023 at 7:13 pm
http://3103.adminka.cc/
JoyceGaike · April 17, 2023 at 7:43 pm
http://7604.adminka.cc/
BarbaraSAR · April 17, 2023 at 8:13 pm
http://2970.adminka.cc/
ShirleyInpub · April 17, 2023 at 8:43 pm
http://3888.adminka.cc/
SharronSlate · April 17, 2023 at 9:12 pm
http://5016.adminka.cc/
Kathymew · April 17, 2023 at 9:42 pm
http://8867.adminka.cc/
NancySEM · April 17, 2023 at 10:12 pm
http://8209.adminka.cc/
EbonieRiz · April 17, 2023 at 10:42 pm
http://9360.adminka.cc/
AishaStise · April 17, 2023 at 11:11 pm
http://2442.adminka.cc/
BlancamoB · April 18, 2023 at 12:10 am
http://2320.adminka.cc/
Jerryamine · April 18, 2023 at 12:40 am
http://6571.adminka.cc/
Shirleyaxorp · April 18, 2023 at 1:10 am
http://5394.adminka.cc/
Laurahoari · April 18, 2023 at 1:39 am
http://7813.adminka.cc/
Lorrikag · April 18, 2023 at 2:09 am
http://2725.adminka.cc/
Robinlek · April 18, 2023 at 3:08 am
http://3335.adminka.cc/
Dollyzex · April 18, 2023 at 3:38 am
http://8975.adminka.cc/
SarahCar · April 18, 2023 at 4:08 am
http://2580.adminka.cc/
ShirleyNup · April 18, 2023 at 4:37 am
http://3821.adminka.cc/
BettyBow · April 18, 2023 at 5:07 am
http://3183.adminka.cc/
Karenced · April 18, 2023 at 5:36 am
http://6067.adminka.cc/
ooshoSix · April 18, 2023 at 5:37 am
В группе https://vk.com/31kopipro вы сможете воспользоваться услугами печатного салона в Белгороде. Для клиентов доступна печать в самом разном формате, на холсте. Вас ожидает высокий уровень сервиса, приемлемые расценки и использование высокотехнологичных материалов, которые и позволяют получить такой отличный результат. Для того чтобы получить более подробную информацию, необходимо позвонить по указанному телефону. Компания работает на высокоточном оборудовании и с применением уникальных и инновационных технологий.
KellyFralt · April 18, 2023 at 6:06 am
http://3834.adminka.cc/
FeleciaAcoub · April 18, 2023 at 6:36 am
http://4123.adminka.cc/
KaitlinDrush · April 18, 2023 at 7:06 am
http://3579.adminka.cc/
Barbaradealm · April 18, 2023 at 7:36 am
http://6993.adminka.cc/
SandragaR · April 18, 2023 at 8:06 am
http://6808.adminka.cc/
MarieAbita · April 18, 2023 at 8:35 am
http://4343.adminka.cc/
Staciashash · April 18, 2023 at 9:05 am
http://1351.adminka.cc/
cestorBob · April 18, 2023 at 9:17 am
Клиника инновационной хирургии предлагает вам пройти лечение у лучших докторов. Оказываются услуги по следующим направлениям: флебология, хирургия, ультразвуковое исследование, проктология, гинекология, неврология. Так каждый получает возможность вылечить любую болезнь, независимо от тяжести ее течения. Оставьте на сайте https://kix-med.ru/ свой телефон для того, чтобы получить консультацию проктолога. В качестве лечения применяются только инновационные и уникальные методики, дорогостоящее оборудование.
KathlynPiomb · April 18, 2023 at 9:34 am
http://8014.adminka.cc/
JolieEngew · April 18, 2023 at 10:04 am
http://2866.adminka.cc/
KathyFeN · April 18, 2023 at 10:34 am
http://6761.adminka.cc/
Laurennal · April 18, 2023 at 11:04 am
http://3506.adminka.cc/
TameraGew · April 18, 2023 at 11:34 am
http://9133.adminka.cc/
EileenVer · April 18, 2023 at 12:04 pm
http://4829.adminka.cc/
Athenasmono · April 18, 2023 at 12:33 pm
http://4118.adminka.cc/
CarolCib · April 18, 2023 at 1:03 pm
http://8440.adminka.cc/
RachelSanum · April 18, 2023 at 1:33 pm
http://4033.adminka.cc/
Juanitaapade · April 18, 2023 at 2:03 pm
http://5333.adminka.cc/
DorisQuoft · April 18, 2023 at 2:33 pm
http://7096.adminka.cc/
JaniceItard · April 18, 2023 at 3:02 pm
http://4392.adminka.cc/
LauriBisee · April 18, 2023 at 3:31 pm
http://9114.adminka.cc/
Michaelnew · April 18, 2023 at 3:38 pm
лотерея онлайн купить
ardennuh · April 18, 2023 at 3:54 pm
На сайте https://skupka.antishop.kz вы сможете ввести свой номер телефона для того, чтобы узнать примерную стоимость, по которой получится реализовать свою бытовую технику. Вы сможете сдать ее максимально быстро и получить за это неплохую сумму. Важным моментом является то, что вам не придется самостоятельно искать покупателя и тратить на это время. Компания покупает как новую, так и б/у технику по доступным ценам. На осмотр уходит не более 5 минут, что экономит ваше время. Техника будет доставлена в офис компании за ее счет.
Michaelnew · April 18, 2023 at 3:55 pm
лото билеты
Tracyaidep · April 18, 2023 at 4:01 pm
http://5051.adminka.cc/
Brendaniz · April 18, 2023 at 4:30 pm
http://7267.adminka.cc/
IreneJergo · April 18, 2023 at 4:59 pm
http://3889.adminka.cc/
Belindamic · April 18, 2023 at 5:29 pm
http://6303.adminka.cc/
lidiySIB · April 18, 2023 at 5:38 pm
На сайте https://bigpicture.ru/ вы сможете изучить новости в картинках, которые касаются самых разных сфер жизни: политики, экономики, звезд шоу-бизнеса, а также фотографии и других важных областей. И самое главное, что все статьи содержательные, информативные, а потому обязательно вызовут интерес у всех групп населения. Вы получите массу положительных эмоций и захотите жадно впитывать информацию, ведь здесь ее действительно очень много. Устроившись с чашкой любимого напитка, начните просматривать новости за последнее время.
SharonGah · April 18, 2023 at 5:59 pm
http://2723.adminka.cc/
Davidemesk · April 18, 2023 at 6:14 pm
azino777 регистрация
Francesbep · April 18, 2023 at 6:28 pm
http://7573.adminka.cc/
LottieBrate · April 18, 2023 at 6:58 pm
http://1997.adminka.cc/
Davidemesk · April 18, 2023 at 7:17 pm
азино 777 доступное зеркало на сегодня
MarianVeria · April 18, 2023 at 7:30 pm
http://2507.adminka.cc/
BarbaraExisp · April 18, 2023 at 8:30 pm
http://2095.adminka.cc/
ShirleyMon · April 18, 2023 at 8:59 pm
http://3053.adminka.cc/
AngelaSibra · April 18, 2023 at 9:28 pm
http://1032.adminka.cc/
BarbaraIderm · April 18, 2023 at 9:58 pm
http://5021.adminka.cc/
MarieFoent · April 18, 2023 at 10:27 pm
http://3900.adminka.cc/
ConnieLed · April 18, 2023 at 10:56 pm
http://1046.adminka.cc/
PennyFrica · April 18, 2023 at 11:25 pm
http://7941.adminka.cc/
Ericager · April 18, 2023 at 11:54 pm
http://1902.adminka.cc/
Rebeccaclulp · April 19, 2023 at 12:23 am
http://6941.adminka.cc/
DianaWhaft · April 19, 2023 at 12:53 am
http://5029.adminka.cc/
Dionnebet · April 19, 2023 at 1:22 am
http://3769.adminka.cc/
TeresaEmaib · April 19, 2023 at 1:51 am
http://6506.adminka.cc/
HattieBup · April 19, 2023 at 2:20 am
http://2105.adminka.cc/
Jackiethymn · April 19, 2023 at 2:50 am
http://8673.adminka.cc/
DebraRow · April 19, 2023 at 3:20 am
http://4393.adminka.cc/
Lynettedof · April 19, 2023 at 3:49 am
http://7556.adminka.cc/
Nataliemousy · April 19, 2023 at 4:18 am
http://9742.adminka.cc/
abbitnon · April 19, 2023 at 4:33 am
На сайте https://sadograd.ru/ приобретите саженцы от производителя по доступным ценам и в любом количестве. Весь посадочный материал качественный, проходит многоступенчатый отбор, чтобы предоставить клиентам продукцию эталонного качества, но по доступным ценам. Имеются новинки, которые точно вызовут интерес и у вас. Питомник существует на рынке более 30 лет, а потому изучил потребности, пожелания клиентов, чтобы предложить высокое качество. Все цены остаются на доступном уровне, действует оперативная доставка.
Mabeljef · April 19, 2023 at 4:48 am
http://8519.adminka.cc/
DavidJab · April 19, 2023 at 4:50 am
Обучение клинингу курс – это профессиональная программа, которая поможет вам овладеть навыками профессиональной уборки. В рамках курса вы научитесь правильно работать с профессиональным оборудованием, выбирать и применять эффективные чистящие средства, а также узнаете все тонкости и секреты профессиональной уборки. После прохождения курса вы будете готовы к работе в любом клининговом сервисе и сможете добиться успеха в этой области.
курсы по химчистке мягкой мебели
Dorothycrype · April 19, 2023 at 5:17 am
http://6465.adminka.cc/
ingokem · April 19, 2023 at 5:41 am
Сайт https://dkm-shop.ru/ представляет собой самый полный справочник магазинов, в которых можно приобрести материалы, комплектующие для мебели. Это самый полный справочник, в котором есть вся необходимая информация, которая будет вам полезна. В перечисленных компаниях вы сможете с легкостью приобрести фурнитуру, петли, уголки, опоры, направляющие и многое другое, что обязательно вам понадобится, если вы занимаетесь сборкой мебели. Все компании проверенные, а потому им можно доверять. Список регулярно обновляется, чтобы предложить вам надежные места.
Jackiebails · April 19, 2023 at 5:46 am
http://8323.adminka.cc/
JulieMaymn · April 19, 2023 at 6:16 am
http://8168.adminka.cc/
CeliaSinty · April 19, 2023 at 7:17 am
http://8308.adminka.cc/
Crystalreoma · April 19, 2023 at 7:47 am
http://8180.adminka.cc/
Tabithahaurf · April 19, 2023 at 8:17 am
http://8363.adminka.cc/
CherylIncig · April 19, 2023 at 8:47 am
http://6769.adminka.cc/
Velmatit · April 19, 2023 at 9:16 am
http://5402.adminka.cc/
ShirleyWaync · April 19, 2023 at 9:46 am
http://6886.adminka.cc/
Timothyanazy · April 19, 2023 at 10:09 am
cat casino бонус
Darlafaich · April 19, 2023 at 10:16 am
http://2575.adminka.cc/
TraceySluri · April 19, 2023 at 10:47 am
http://7257.adminka.cc/
Timothyanazy · April 19, 2023 at 11:11 am
cat casino верификация
Georgiawap · April 19, 2023 at 11:18 am
http://3160.adminka.cc/
MaribelTut · April 19, 2023 at 11:47 am
http://3368.adminka.cc/
CindiJoymn · April 19, 2023 at 12:17 pm
http://1793.adminka.cc/
Sandrahah · April 19, 2023 at 12:48 pm
http://9194.adminka.cc/
Cristywoomy · April 19, 2023 at 1:18 pm
http://4421.adminka.cc/
Angelalot · April 19, 2023 at 1:48 pm
http://1812.adminka.cc/
arsikjSpuff · April 19, 2023 at 2:00 pm
Посетите сайт https://zalogmen-spb.ru/ и вы сможете взять кредит под залог недвижимости. Кредит выдается за 1 день. В залог принимается недвижимость, которая есть в собственности, и вы это можете подтвердить документом о собственности. Также вы сможете узнать онлайн сумму одобренного кредита. Партнером проекта выступает cashtoday
LindaBiX · April 19, 2023 at 2:19 pm
http://6917.adminka.cc/
Shirleyroode · April 19, 2023 at 2:49 pm
http://7039.adminka.cc/
Bryonsut · April 19, 2023 at 2:53 pm
https://www.informetr.ru/forum/viewtopic.php?pid=2734065#p2734065
Violagax · April 19, 2023 at 3:20 pm
http://4887.adminka.cc/
DianeAlign · April 19, 2023 at 3:50 pm
http://4717.adminka.cc/
JanineAlbut · April 19, 2023 at 4:20 pm
http://9105.adminka.cc/
Debralox · April 19, 2023 at 4:50 pm
http://4700.adminka.cc/
Rubyebyday · April 19, 2023 at 5:21 pm
http://5922.adminka.cc/
sthidKed · April 19, 2023 at 5:30 pm
На сайте https://obzorgroup.ru/ изучите надежные магазины, в которых можно приобрести швейную фурнитуру, ткани и многое другое по доступным ценам и высокого качества. Кроме того, вы сможете ознакомиться и с полезной, нужной информацией, которая касается того, для чего нужна фурнитура, Это огромный ассортимент, в который входят следующие позиции: швейные нитки и принадлежности, застежки, пряжки, пластиковая фурнитура и многое другое, что вам обязательно пригодится. Администрация портала сделала подборку только тех компаний, которые заслуживают вашего внимания.
Barbaradef · April 19, 2023 at 5:50 pm
http://1715.adminka.cc/
AnthonyHic · April 19, 2023 at 5:51 pm
https://www.bestfreeseotools.co/ro/domain/loanvstoto.com
Phyllisvot · April 19, 2023 at 6:21 pm
http://5390.adminka.cc/
JanisBit · April 19, 2023 at 6:50 pm
http://8820.adminka.cc/
AnthonyHic · April 19, 2023 at 6:55 pm
https://meuseo.site/pt/domain/loanvstoto.com/y8mh643e02ce26c01
Jannajoism · April 19, 2023 at 7:19 pm
http://3569.adminka.cc/
NancySor · April 19, 2023 at 7:49 pm
http://1155.adminka.cc/
AnthonyHic · April 19, 2023 at 7:57 pm
https://sitesearch.net/domain/loanvstoto.com
Lianasag · April 19, 2023 at 8:19 pm
http://5652.adminka.cc/
Susanhiz · April 19, 2023 at 8:48 pm
http://6313.adminka.cc/
YolandaHeity · April 19, 2023 at 9:18 pm
http://5757.adminka.cc/
Mablebed · April 19, 2023 at 9:47 pm
http://5750.adminka.cc/
Mariacot · April 19, 2023 at 10:16 pm
http://8008.adminka.cc/
Denisejaw · April 19, 2023 at 10:45 pm
http://6456.adminka.cc/
AnthonyHic · April 19, 2023 at 11:11 pm
https://jsanalyzer.com/domain/loanvstoto.com
Nicoleorami · April 19, 2023 at 11:14 pm
http://7950.adminka.cc/
miyadsleem · April 19, 2023 at 11:23 pm
На сайте https://youm.ru/ ознакомьтесь со свежими новостями игр, подробностями, чит-кодами, полезными, информативными статьями, которые ответят на многочисленные вопросы. Имеются интересные подробности, касающиеся Айфона 17, есть публикации на тему лучших и проверенных холодных кошельков. Здесь представлены самые последние и актуальные данные, которые будут интересны всем. Есть горячие новости, а также популярные статьи, которые читает большинство. Ознакомьтесь с ними и вы.
Lauriedof · April 19, 2023 at 11:44 pm
http://7055.adminka.cc/
ElviraFally · April 20, 2023 at 12:14 am
http://9167.adminka.cc/
aidaovem · April 20, 2023 at 12:31 am
На сайте https://autolombard26.ru/ с помощью cashtoday вы сможете взять краткосрочный займ под залог автомобиля, как легкового, так и грузового. Главное условие – вам от 18 лет. Ваш автомобиль будет находиться на охраняемой стоянке автоломбарда и вы получаете деньги под залог авто.
Cherylgoora · April 20, 2023 at 12:43 am
http://6910.adminka.cc/
Carolyntek · April 20, 2023 at 1:13 am
http://9921.adminka.cc/
KelleySes · April 20, 2023 at 1:42 am
http://5200.adminka.cc/
BettyKen · April 20, 2023 at 2:12 am
http://6552.adminka.cc/
LindsayVof · April 20, 2023 at 2:42 am
http://5137.adminka.cc/
VenitaPah · April 20, 2023 at 3:10 am
http://9604.adminka.cc/
Vickyven · April 20, 2023 at 3:40 am
http://2790.adminka.cc/
Barbaragok · April 20, 2023 at 4:09 am
http://5773.adminka.cc/
Angelafum · April 20, 2023 at 4:39 am
http://4787.adminka.cc/
Carlasar · April 20, 2023 at 5:08 am
http://2641.adminka.cc/
rkhorKeype · April 20, 2023 at 5:18 am
На сайте https://zaimpodbor.ru/ вы найдете кредитные компании, которые быстро выдадут необходимую сумму без справок, поручителей, без пакета документов. Все, что от вас потребуется, это только паспорт. Важно то, что на этом сайте только проверенные заведения, которые работают на прозрачных условиях, честно. Для того чтобы подобрать подходящий тип продукта, необходимо воспользоваться фильтром. Следует ввести сумму, а также срок, на который планируется оформить кредит.
MistyCig · April 20, 2023 at 5:37 am
http://3967.adminka.cc/
TheresaZoT · April 20, 2023 at 6:07 am
http://7677.adminka.cc/
BessieReday · April 20, 2023 at 6:38 am
http://2755.adminka.cc/
Goldietob · April 20, 2023 at 7:08 am
http://8613.adminka.cc/
Ruthieequix · April 20, 2023 at 7:39 am
http://3390.adminka.cc/
AmeliaPlova · April 20, 2023 at 8:09 am
http://6562.adminka.cc/
SusanEffib · April 20, 2023 at 8:39 am
http://2709.adminka.cc/
Joannestula · April 20, 2023 at 9:12 am
http://6794.adminka.cc/
ErikaBot · April 20, 2023 at 9:41 am
http://5380.adminka.cc/
JamesHex · April 20, 2023 at 10:04 am
санэпидемстанция Самара официальный сайт Санэпидемстанция Самара официальный сайт нашей службы СЭС по обработке помещений от насекомых и грызунов. Методы обработки – Холодный туман. dez-samara.ru
EsterUnlab · April 20, 2023 at 10:10 am
http://7211.adminka.cc/
JamesHex · April 20, 2023 at 11:01 am
сэс в Самаре СЭС в Самаре предлагает свои услуги по избавлению клопов, тараканов, клещей, мышей, крыс. Работаем круглосуточно. Заявки принимаем с 6 утра до 23 часов вечера. dez-samara.ru
oMyasnal · April 20, 2023 at 11:02 am
На нашем сайте https://forexmobi.ru/ можете узнать о Форексе практически всё. При помощи наших видео уроков, сможете работать на Форексе даже новичок, который не знаком с валютным рынком Форекс. Если у вас не хватает первоначальных инвестиций для заработка на Форекс – вы всегда сможете перейти на сайт нашего партнера cashtoday чтобы оформить займ.
DeannCrofe · April 20, 2023 at 11:40 am
http://9763.adminka.cc/
Adonisempixelm · April 20, 2023 at 11:49 am
browse around here
JamesHex · April 20, 2023 at 11:57 am
сэс Самара официальный СЭС Самара официальный сайт dez-samara.ru – предлагаем обработку от насекомых и грызунов в подвалах, подъездах, складах. Работаем круглосуточно, оплата наличными и безнал.
ChanaKeect · April 20, 2023 at 12:10 pm
http://3379.adminka.cc/
Rachelhodew · April 20, 2023 at 12:40 pm
http://5865.adminka.cc/
orovvFuh · April 20, 2023 at 1:05 pm
Firm – барбершоп Минск https://mensk.firmbarbershop.com/ отличается высоким качеством и мастерством. Мы уважаем друг друга, но никому не подражаем. FIRM — философия, которая близка каждому мужчине.
PamelaRhype · April 20, 2023 at 1:10 pm
http://9978.adminka.cc/
DelorisHoOpy · April 20, 2023 at 1:40 pm
http://9922.adminka.cc/
SusannaJep · April 20, 2023 at 2:11 pm
http://9752.adminka.cc/
PaulineBob · April 20, 2023 at 2:40 pm
http://9163.adminka.cc/
Bettyrat · April 20, 2023 at 3:11 pm
http://8815.adminka.cc/
Kellimycle · April 20, 2023 at 3:41 pm
http://8335.adminka.cc/
DavidMus · April 20, 2023 at 3:50 pm
https://1xslots-online.work/
MeaganNaple · April 20, 2023 at 4:11 pm
http://7735.adminka.cc/
AnnieAlofs · April 20, 2023 at 4:41 pm
http://7212.adminka.cc/
maetalIb · April 20, 2023 at 5:03 pm
На сайте http://misokmv.ru/ вы сможете ознакомиться с актуальной информацией, посвященной институту современного образования. Так вы узнаете о том, каких специалистов подготавливает это учреждение. Имеются самые ожидаемые и актуальные события, которые никак нельзя пропустить. Вместе с тем, при необходимости вы всегда сможете задать интересующий вас вопрос. Воспользуйтесь возможностью оперативно подать заявку на обучение в институте. Вы получите отличное и качественное образование, а потом найдете работу по душе.
Hazelnab · April 20, 2023 at 5:10 pm
http://7113.adminka.cc/
ConnieInjuh · April 20, 2023 at 5:41 pm
http://6612.adminka.cc/
LeslieQuach · April 20, 2023 at 6:10 pm
http://6058.adminka.cc/
mrkatLax · April 20, 2023 at 6:11 pm
На сайте https://lilibum.ru вы сможете познакомиться с интересными для вас людьми, завести новые знакомства, отношения. Если вы давно мечтали о любви, то на этом портале вы обязательно найдете того, кто будет вам дорог. Просто пригласите на свидание того, кто понравился. Это ускорит ваши шансы завязать долгосрочные отношения. Здесь также можно отыскать человека для дружбы, совместного проведения досуга. У вас есть уникальная возможность обмениваться фотографиями, а новые лица появляются постоянно.
AliceAnise · April 20, 2023 at 6:42 pm
http://5608.adminka.cc/
Pamelakab · April 20, 2023 at 7:11 pm
http://5464.adminka.cc/
Bryonsut · April 20, 2023 at 7:28 pm
http://www.pets-ural.ru/content/forum/viewtopic.php?t=15213
BettyIgnom · April 20, 2023 at 7:41 pm
http://5246.adminka.cc/
Anitateefe · April 20, 2023 at 8:11 pm
http://4888.adminka.cc/
Bryonsut · April 20, 2023 at 8:35 pm
http://wmmoney.tforums.org/viewtopic.php?f=79&t=17301
PhyllisCar · April 20, 2023 at 8:41 pm
http://4795.adminka.cc/
VerdieBeavy · April 20, 2023 at 9:11 pm
http://4431.adminka.cc/
velevvalty · April 20, 2023 at 9:36 pm
На сайте кредитного союза https://rks39.ru/ вы сможете оформить микрозайм на выгодных условиях, а также займ под залог ПТС, займ под залог авто, займ под залог недвижимости. Наш партнер cashtoday оказывает быструю финансовую помощь.
Nellybek · April 20, 2023 at 9:41 pm
http://4357.adminka.cc/
Bryonsut · April 20, 2023 at 9:43 pm
http://ruall.com/raznoe-po-biznesu/68442-restavratsiya-shub.html#68442
shovfupdak · April 20, 2023 at 9:54 pm
Кинематограф продолжает радовать зрителей своими новинками, фильмы 2023 которые уже вышли и доступны на https://lordserial.icu/film2023g0/filmy-2023/ в высоком качестве HD 720. Невероятные приключения, захватывающие драмы, увлекательные комедии и многое другое. Новые фильмы 2023 года уже успели завоевать сердца многих зрителей и стать настоящими хитами. Но наш сайт предлагает не только самые свежие кинопремьеры, но и уже вышедшие фильмы 2023 года, которые не потеряли своей актуальности и до сих пор остаются любимыми зрителями.
Farahhah · April 20, 2023 at 10:10 pm
http://4229.adminka.cc/
Bryonsut · April 20, 2023 at 10:39 pm
https://pressaru.de/forum/index.php?topic=29177.0
SarahHooNy · April 20, 2023 at 10:40 pm
http://4227.adminka.cc/
CarolynMot · April 20, 2023 at 11:10 pm
http://4180.adminka.cc/
Bryonsut · April 20, 2023 at 11:35 pm
https://www.center-region.com/club/user/13562/blog/15159
Janicespunk · April 20, 2023 at 11:39 pm
http://3861.adminka.cc/
RoxanneLom · April 21, 2023 at 12:09 am
http://3331.adminka.cc/
Bryonsut · April 21, 2023 at 12:32 am
http://www.corsa-club.net/forum/index.php?topic=47712.new#new
Tammyninge · April 21, 2023 at 12:39 am
http://2880.adminka.cc/
Deannahurry · April 21, 2023 at 1:08 am
http://2235.adminka.cc/
WilliamAvent · April 21, 2023 at 1:37 am
Посмотрите интересное видео на ютубе Финишная шпаклевка Спасибо Всем
ViolaRiz · April 21, 2023 at 1:38 am
http://2217.adminka.cc/
Carolquirm · April 21, 2023 at 2:37 am
http://1624.adminka.cc/
Bryonsut · April 21, 2023 at 2:42 am
https://obmenka.forum2x2.ru/t13095-topic#32475
Lynettesuh · April 21, 2023 at 3:07 am
http://1556.adminka.cc/
KishaSog · April 21, 2023 at 3:37 am
http://1465.adminka.cc/
Fatimadyday · April 21, 2023 at 4:07 am
http://1345.adminka.cc/
Bryonsut · April 21, 2023 at 4:32 am
http://women.getbb.ru/viewtopic.php?f=2&t=504
MarilynInecy · April 21, 2023 at 4:37 am
http://1234.adminka.cc/
cowbohaimb · April 21, 2023 at 4:50 am
На сайте https://j-center.ru/ вы сможете записаться на обучение в школу парикмахерского искусства Юлии Бурдинцевой. Она ведет подготовку высококлассных специалистов, которые создают роскошное окрашивание, модную стрижку и в обязательном порядке клиент получит именно такой результат, на который рассчитывал. На уроках минимальное количество теории, чтобы вы больше практиковались. Все выпускники получают огромный опыт в данной сфере, чтобы потом применить его на практике. Вы сможете выбрать наиболее подходящий для себя формат обучения.
Thelmaevawn · April 21, 2023 at 5:07 am
http://1151.adminka.cc/
Bryonsut · April 21, 2023 at 5:34 am
https://bvf.ru/forum/showthread.php?p=25170084#post25170084
VanessaGap · April 21, 2023 at 5:37 am
http://1114.adminka.cc/
MelanieLig · April 21, 2023 at 6:07 am
http://1047.adminka.cc/
Bryonsut · April 21, 2023 at 6:35 am
http://ak.liveforums.ru/viewtopic.php?id=6641#p11228
Lynettesuh · April 21, 2023 at 6:35 am
http://6946.adminka.cc/
Juliaabisy · April 21, 2023 at 7:07 am
порно куколд
http://www.bylki.info
Bryonsut · April 21, 2023 at 7:33 am
https://vsemsovetu.forum2x2.ru/t3127-topic#5919
Juliaabisy · April 21, 2023 at 7:36 am
читаем порно рассказы
Juliaabisy · April 21, 2023 at 8:06 am
порно дилдо
http://www.bylki.online
ikovaBetry · April 21, 2023 at 8:11 am
На сайте https://babkivdolg.ru/ вы можете получить займ без посещения офиса. Одобрение и перечисление на карту онлайн. Благодаря нашему партнеру cashtoday выдача займа занимает буквально 5 минут. Все условия прозрачны.
buy elavil 10 mg · April 21, 2023 at 8:30 am
hyzaar tablets order hyzaar where to buy hyzaar 12,5mg
Juliaabisy · April 21, 2023 at 8:37 am
домашнее порно с разговорами
http://www.bylki.org
Juliaabisy · April 21, 2023 at 9:08 am
порно трахает
http://www.bylki.video
Juliaabisy · April 21, 2023 at 9:38 am
порно мулатки
Juliaabisy · April 21, 2023 at 10:08 am
читаем порно
Juliaabisy · April 21, 2023 at 10:37 am
порно худые
https://www.pornozavod.me
Juliaabisy · April 21, 2023 at 11:06 am
шикарное порно
https://www.pornozavod.top
Juliaabisy · April 21, 2023 at 11:37 am
порно приходите
https://www.yaeby.art
Juliaabisy · April 21, 2023 at 12:06 pm
порно хабов
BradleyCal · April 21, 2023 at 12:13 pm
покердом вход зеркало
BradleyCal · April 21, 2023 at 12:23 pm
покердом зеркало сегодня
Juliaabisy · April 21, 2023 at 12:36 pm
порно старики
https://www.yaeby.mobi
Juliaabisy · April 21, 2023 at 1:07 pm
смотреть порно без
https://www.yaeby.red
Juliaabisy · April 21, 2023 at 1:37 pm
порно приходите
Lesliewed · April 21, 2023 at 2:07 pm
http://20541.adminka.cc/
Lesliewed · April 21, 2023 at 2:37 pm
http://205412.adminka.cc/
Lesliewed · April 21, 2023 at 3:07 pm
http://1032.adminka.cc/
Lesliewed · April 21, 2023 at 3:36 pm
http://6862.adminka.cc/
Johnnyamowl · April 21, 2023 at 3:39 pm
http://tender.chelny-hleb.ru/bitrix/rk.php?goto=https://llidbill.com/
Lesliewed · April 21, 2023 at 4:06 pm
http://1559.adminka.cc/
Lesliewed · April 21, 2023 at 4:36 pm
http://9314.adminka.cc/
wragghal · April 21, 2023 at 4:46 pm
На сайте https://pozdravlyalki.club/ скачайте бесплатно открытки мерцающие с пожеланиями. На сайте красивые открытки поздравления в ярком гиф формате для любого повода: именные, по годам, для различных праздников и мероприятий. Скачайте веселое и радостное поздравление для близкого, родного человека. Среди большого количества вариантов обязательно найдете подходящий.
Lesliewed · April 21, 2023 at 5:05 pm
http://7484.adminka.cc/
Lesliewed · April 21, 2023 at 5:37 pm
http://8287.adminka.cc/
Lesliewed · April 21, 2023 at 6:07 pm
http://4461.adminka.cc/
Lesliewed · April 21, 2023 at 6:37 pm
http://8045.adminka.cc/
rdeevFlosy · April 21, 2023 at 6:41 pm
Сайт https://74ipoteka.ru/ поможет получить ипотеку по всей России. Благодаря нашему партнеру cashtoday вы сможете оформить ипотечный кредит на сумму до 20 миллионов рублей. Мы оказываем помощь в оформлении ипотеки без первоначального взноса.
Lesliewed · April 21, 2023 at 7:06 pm
http://4064.adminka.cc/
Lesliewed · April 21, 2023 at 7:36 pm
http://2753.adminka.cc/
Lesliewed · April 21, 2023 at 8:07 pm
http://12456.adminka.cc/
Lesliewed · April 21, 2023 at 8:40 pm
http://5555.adminka.cc/
Johnnyamowl · April 21, 2023 at 8:51 pm
http://stanislav-milevich.ru/bitrix/rk.php?goto=https://loanvstoto.com/
Lesliewed · April 21, 2023 at 9:13 pm
http://6666.adminka.cc/
Lesliewed · April 21, 2023 at 9:48 pm
http://7777.adminka.cc/
Lesliewed · April 21, 2023 at 10:22 pm
http://12561.adminka.cc/
Johnnyamowl · April 21, 2023 at 10:28 pm
http://korzinka.com/bitrix/rk.php?goto=https://llidbill.com/
Lesliewed · April 21, 2023 at 10:57 pm
http://2222.adminka.cc/
RodneyNom · April 21, 2023 at 10:59 pm
Watch an interesting video coloring books Thank you
Lesliewed · April 21, 2023 at 11:31 pm
http://22221.adminka.cc/
Johnnyamowl · April 22, 2023 at 12:01 am
https://locosxkko.mforos.com/visit/?https://pay-moa.com/
Lesliewed · April 22, 2023 at 12:05 am
http://22222.adminka.cc/
Lesliewed · April 22, 2023 at 12:39 am
http://22223.adminka.cc/
ksenowergy · April 22, 2023 at 1:33 am
Собираете ребенка в лагерь в первый раз? Сайт https://orlenok-perm.ru/ вам в этом поможет. Получите всю необходимую информацию, а также с ознакомьтесь с партнером проекта cashtoday – оформить займ если не хватает средств на поездку. Лучшие условия по кредитованию онлайн с подбором лучших предложений банков по картам, займам, ипотеке, автокредиту. Взять и оформить можно онлайн.
Johnnyamowl · April 22, 2023 at 1:33 am
http://www.adr-t.ru/bitrix/redirect.php?goto=https://llidbill.com/
Lesliewed · April 22, 2023 at 1:41 am
http://xn--m1abbbg.top/
Johnnyamowl · April 22, 2023 at 3:05 am
https://www.gorbuha.ucoz.ru/go?https://best-toto2.com/
Johnnyamowl · April 22, 2023 at 4:33 am
https://textshop.blogsky.com/dailylink/?go=https%3A%2F%2Fpay-moa.com&id=1
robevbriew · April 22, 2023 at 5:04 am
Получить кредит наличными на сайте https://3credita.ru/ очень просто. Заявка на кредит с помощью cashtoday – это быстрый и эффективный способ подачи заявок сразу во все выбранные нами для вас банки вашего региона. Большой срок кредитования. Гарантия 100 процентного одобрения.
Johnnyamowl · April 22, 2023 at 6:06 am
https://ros.bongacams20.com/chat-popup/angel-vita?hit_url=https%3A%2F%2Floanvstoto.com
Johnnyamowl · April 22, 2023 at 7:42 am
https://fparf.ru:443/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://best-toto2.com/
Johnnyamowl · April 22, 2023 at 9:21 am
https://www.zhivagobank.ru/bitrix/rk.php?id=24&event1=banner&event2=click&event3=1+%2f+%5b24%5d+%5bcorporateother_topmenu_other%5d+%d0%96%d0%b8%d0%b2%d0%b0%d0%b3%d0%be-%d0%b1%d0%b0%d0%bd%d0%ba+%d0%9e%d0%bd%d0%bb%d0%b0%d0%b9%d0%bd&goto=https%3a%2f%2floanvstoto.com
ddeikdooky · April 22, 2023 at 9:47 am
На сайте https://chatgpt-telegram.com вы сможете воспользоваться всеми возможностями нейросети ChatGPT. Она может писать, генерировать тексты, писать тексты песен и даже курсовые работы. Умный интеллект отвечает на любые вопросы пользователей, творчески подходит к разрешению всех ситуаций. Нейросеть отлично анализирует информацию и пишет коды на различных языках программирования. Пользоваться софтом очень просто. Для этого необходимо лишь задать вопрос, после чего будет подобран на него ответ.
arovaKeype · April 22, 2023 at 9:52 am
На сайте https://ketodieto.com/ вы сможете узнать всю интересную, нужную информацию, которая касается кето-диеты. Рассматриваются основы, принципы питания, а также то, какие продукты лучше всего употреблять, чтобы оздоровить организм, скинуть вес. Представлено примерное меню на несколько дней. Кроме того, имеются такие темы, которые активно обсуждаются, комментируются. Есть ценные рекомендации, советы, которые помогут наладить питание на кето-диете. Есть информация, которая касается того, что делать, если вы чувствуете усталость на такой диете.
giiboNeimb · April 22, 2023 at 10:00 am
Один из лучших клубных строительных проектов на севере Москвы https://taiga-park.ru/ предлагает уникальные условия приобретения жилья. Ознакомьтесь с полной информацией о партнере проекта cashtoday – где вы сможете подобрать ипотеку с низкой ставкой на лучших условиях на рынке – ипотека без первоначального взноса, ипотека на строительство, ипотека на загородный дом или семейная ипотека. На сайте есть ипотечный калькулятор.
novikoBRita · April 22, 2023 at 10:07 am
На сайте https://proxy-solutions.net/ua находятся прокси в самом разном количестве и по доступным, максимально низким ценам. Вы сможете выбрать вариант, который будет вас устраивать по всем параметрам. Оплачивайте покупку именно так, как вам удобно. Все системы работают в автоматическом режиме. Все прокси появляются в кабинете сразу после оплаты. Средства будут возвращены на счет, если услугу по какой-то причине не оказали. Совершите выгодное приобретение прямо сейчас и оплатите в той валюте, которая вам удобна.
aterinfrone · April 22, 2023 at 10:12 am
На сайте https://aptekamos.ru/ вы сможете в 2 счета найти и заказать в ближайшую аптеку любые лекарственные средства, препараты для лечения ЖКТ, насморка, простуды и многого другого. Здесь же вы сможете отыскать как популярные, так и редкие препараты, которых нет в аптеках вашего города. Имеются адреса, телефоны аптек. Изучите весь имеющийся ассортимент, а многие аптеки и вовсе работают в круглосуточном режиме. На портале ознакомьтесь с актуальными новостями на медицинскую тематику.
ozdovsal · April 22, 2023 at 11:00 am
На сайте https://metamask.rip/ вы сможете воспользоваться всеми возможностями программного криптовалютного кошелька. Он генерирует ключи, а также работает с ними локально. Помогает пользователям получить доступ к собственному кошельку при помощи расширения браузера либо мобильное приложение. Программа гарантирует абсолютную безопасность, а также сохранность данных. Именно поэтому этим кошельком пользуются во всем мире. При помощи кошелька вы сможете выводить, а также отправлять криптовалюту.
Johnnyamowl · April 22, 2023 at 12:49 pm
https://morshansk.kolesa-darom.ru/bitrix/redirect.php?goto=https://pay-moa.com/
Johnnyamowl · April 22, 2023 at 2:30 pm
https://bezlimitno.ru/bitrix/rk.php?goto=https://best-toto2.com/
ikiforoMoise · April 22, 2023 at 3:43 pm
Сайт https://rus-izbushka.ru/ предлагает к покупке дома, бани, бытовки, беседки, гаражи, заборы. Уникальные цены. Если вы мечтали об обустройстве сада, дачи или загородного дома, но не хватает денежных средств, то вам всегда поможет наш партнер cashtoday – взять кредит или займ на покупку очень просто.
Johnnyamowl · April 22, 2023 at 4:10 pm
https://shopudachi.ru/bitrix/redirect.php?goto=https://llidbill.com/
Johnnyamowl · April 22, 2023 at 7:30 pm
https://rezinovyesmesi.go64.ru/bitrix/redirect.php?goto=https://llidbill.com/
kondrloums · April 22, 2023 at 7:57 pm
На сайте https://agsvv.ru/ вы сможете приобрести различную медицинскую технику собственного производства. В разделе представлены облучатели, которые помогают вылечить ряд кожных заболеваний. Есть и различные голосообразующие аппараты для голоса. Всю продукцию вы сможете приобрести по привлекательным ценам, доступна быстрая доставка по всей России, а потому все, что хотите, вы сможете заказать в абсолютно любой регион. Изучите весь каталог товаров, чтобы сделать окончательный выбор.
Johnnyamowl · April 22, 2023 at 9:01 pm
https://profiles-vkontakte.ru/away/best-toto2.com
iilturoRew · April 22, 2023 at 9:51 pm
На сайте https://rabit.ru/ вы сможете оформить заявку на ремонт цифровой техники дома либо в офисе. Над каждым заказом работают квалифицированные специалисты с огромным опытом. Они делают все необходимое для того, чтобы вы забрали технику в ближайшее время. И самое главное, что все запчасти являются качественными, оригинальными. Работа происходит не только по Москве, но и Подмосковью. Все работы выполняются по доступным ценам, а потому воспользоваться можно в любой момент. Компания на рынке более 19 лет.
Johnnyamowl · April 22, 2023 at 10:29 pm
https://zimmer.blogsky.com/dailylink/?go=http%3A%2F%2Fbest-toto2.com&id=1
Johnnyamowl · April 22, 2023 at 11:54 pm
https://oimokihujin.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https%3A%2F%2Fbest-toto2.com
Kev_Groca · April 23, 2023 at 12:37 am
https://msblackrose.com/sizzling-summer-part-2/#comment-6796
Johnnyamowl · April 23, 2023 at 1:20 am
https://derit.ivanovoobl.ru/bitrix/rk.php?goto=https://llidbill.com/
naYudnaw · April 23, 2023 at 2:09 am
На сайте пин ап казино https://casino-pinup.com вы сможете сыграть в увлекательные игры. Сайт pin up casino это удобная возможность приятно провести время. Пин ап официальный сайт предлагает различные бонусы и фри спины. Всегда актуальное пин ап зеркало.
Johnnyamowl · April 23, 2023 at 2:44 am
http://xn--8-0tbal0b.xn--p1ai/bitrix/redirect.php?event1=&event2=&event3=&goto=https://loanvstoto.com/
arpziopict · April 23, 2023 at 3:42 am
На сайте https://edaairporttransfer.ru/ вы сможете ознакомиться с различными видами трансфера из Анталии во всевозможные направления. Трансфер Анталия из аэропорта в Белек, трансфер Анталия Алания, трансфер из аэропорта в Кемер, из Анталии в Каппадокию вы всегда сможете легко заказать и оформить на сайте. Компания много лет специализируется на трансферах из аэропорта Анталии и заслужила репутацию лучшей компании.
Johnnyamowl · April 23, 2023 at 4:06 am
http://mtpkrskstate.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://llidbill.com/
Johnnyamowl · April 23, 2023 at 5:32 am
http://www.dvsavto.ru/bitrix/rk.php?goto=https://llidbill.com/
arinaprusy · April 23, 2023 at 6:04 am
На сайте https://dverimoskwa.ru/ вы сможете приобрести межкомнатные, входные двери, раздвижные купе, а также двери-пенал, сопутствующую фурнитуру, порталы и арки, а также становые панели и многое другое. И самое главное, что все это по доступным ценам, а заказать специалиста на замер вы сможете в любое время. Воспользуйтесь профессиональной установкой дверей, которая будет проведена в наиболее комфортное время. А если вы уже сделали заказ, то его можно отследить в специальной графе. Каждый месяц на определенный товар проводится акции, действуют скидки.
iheevasip · April 23, 2023 at 6:24 am
На сайте https://zamok-ok.ru можно узнать номер телефона для того, чтобы позвонить и вызвать опытного, компетентного мастера для починки замка. Специально для вас установлены честные расценки. Работа ведется в круглосуточном режиме. Для того чтобы вызвать специалиста, необходимо позвонить по обозначенному номеру. Ознакомьтесь со всем списком услуг, которые можно заказать в компании. Она находится на рынке более 20 лет, а потому зарекомендовала себя в качестве надежного и практичного партнера.
Johnnyamowl · April 23, 2023 at 7:06 am
https://utils.mytona.com/redirect_og?url=https%3A//best-toto2.com&t=p&title=I%27ve%20banished%20t
Johnnyamowl · April 23, 2023 at 8:38 am
https://swuniverse.mforos.com/visit/?https://pay-moa.com/
Kev_Groca · April 23, 2023 at 8:48 am
https://ludonmedoc.fr/uncategorized/hello-world/#comment-2005
olkovshunk · April 23, 2023 at 9:34 am
На сайте https://beru-vse.online/ вы сможете продать или приобрести нужную вещь, недвижимость, бытовую технику и многое другое. Здесь получится отыскать предложения для частных лиц, а также корпоративных клиентов. Важным моментом является то, что на сайте имеются как абсолютно новые вещи, так и б/у. Разместить предложение достаточно просто – необходимо лишь пройти быструю регистрацию, после чего выбрать регион, добавить фото. Ожидайте звонки от потенциальных покупателей. Они обязательно отзовутся на ваше предложение.
honovvEd · April 23, 2023 at 12:40 pm
Сайт https://booking-ru.ru/ – это отличный сервис по подбору отелей, хостелов, гостевых домов, апартаментов по всему миру. Также вы сможете купить авиабилеты в любую точку мира онлайн, без регистрации за пару кликов. Поиск и бронирование отелей, авиабилетов, трансферов, страховок, экскурсий еще никогда не был таким простым. Для владельцев объектов имеется возможность зарегистрировать свой объект для путешественников.
smordImick · April 23, 2023 at 4:26 pm
На сайте https://poisk-stroy.ru/ вы найдете полезные, нужные советы, которые касаются строительства, ремонта. Так имеется материал о шлифовке дерева, которая выполняется вручную, узнаете информацию о торцовочной пиле, имеются данные о том, во сколько вам обойдется искусственная трава. Есть виды, а также наиболее доступные и дешевые варианты. Имеются рекомендации от профессионалов, которые помогут разгладить новые шторы без глажки. Все статьи подходят для изучения на каждый день или во время выполнения строительных работ.
Johnnyamowl · April 23, 2023 at 8:46 pm
https://klex.ru:443/click.php?id=17&url=https://best-toto2.com/
Johnnyamowl · April 23, 2023 at 10:28 pm
https://myboard.com.ua/go/?url=https://best-toto2.com/
Kev_Groca · April 23, 2023 at 11:51 pm
https://www.ricolins.com/entrevista-de-rico-lins-para-o-livro-lust/#comment-107812
Johnnyamowl · April 24, 2023 at 12:11 am
https://ivbt.net/redirect.php?url=aHR0cHM6Ly9sbGlkYmlsbC5jb20v
Johnnyamowl · April 24, 2023 at 1:53 am
https://toolbarqueries.google.co.cr/url?q=https://loanvstoto.com/
gorevader · April 24, 2023 at 2:07 am
На сайте http://ochaguu.ru/ вы сможете забронировать столик для того, чтобы отведать блюда высококлассного шеф-повара из Азербайджана. Заведение понравится своим гостеприимством, безупречным уровнем сервиса, а также по-домашнему вкусной едой, которая тает во рту. А еще здесь приятная, классная музыка, которая обязательно вам понравится, антураж детально проработан, чтобы вы попали в непринужденную атмосферу. Если из меню выберете мясо, то оно будет таять во рту, а нежный вкус оттенит соус, приготовленный по особому рецепту.
avolkdok · April 24, 2023 at 2:39 am
На сайте https://farmuzon.net/ вы сможете послушать удивительную, яркую и красивую музыку, которая добавит настроения и сделает ваш день солнечным. Перед вами узбекские, турецкие, таджикские, иранские и казахские песни, которые понравятся всем ценителям красивых композиций. Все они в хорошем качестве, а потому прослушивание доставляет только приятные эмоции. Перед вами огромный выбор песен, которые необходимо послушать и вам. Есть как любимые многими треки, так и ожидаемые новинки, выхода которых все ждали с особым нетерпением.
Johnnyamowl · April 24, 2023 at 3:35 am
https://www.dairyculture.ru/bitrix/rk.php?goto=https://loanvstoto.com/
ortitoTiexy · April 24, 2023 at 4:01 am
На сайте https://armoredwarfare.ru есть возможность приобрести все необходимое для игры: золото, прем танк, командиры, премиум-статус и другое. Для того чтобы подыскать нужный вариант, необходимо воспользоваться специальным фильтром, который автоматически подберет его. Имеется специальный раздел, в котором находятся все ваши покупки. Воспользуйтесь бесплатной раздачей пин-кодов, почитайте отзывы пользователей об этом сервисе. Регулярное пополнение магазина новыми товарами. Заходите сюда периодически.
Johnnyamowl · April 24, 2023 at 5:21 am
https://www.ancestry.co.uk/mrd?key=Uhttps://pay-moa.com/
Jasonjuido · April 24, 2023 at 8:02 am
https://seoanalyzerr.com/domain/kang-pro.com
Jasonjuido · April 24, 2023 at 9:22 am
https://seoanalyzer.gr/domain/kang-pro.com
Jasonjuido · April 24, 2023 at 10:41 am
https://seo.zioncentre.com/domain/kang-pro.com
Jasonjuido · April 24, 2023 at 11:58 am
https://www.bestfreeseotools.co/ro/domain/kang-pro.com
ahmedProow · April 24, 2023 at 12:42 pm
На сайте https://newmp3.me/ вы сможете послушать приятные, красивые треки, которые не оставят равнодушным ни одного меломана. Есть композиции на самый разный вкус, а потому вы найдете вариант для прослушивания на празднике, прогулке, на романтическом свидании или если просто желаете разнообразить досуг. Музыка присутствует в отличном качестве, в большом многообразии. Есть треки, которые находятся в топе за неделю, месяц. Послушайте их и вы. Регулярно добавляются новинки, которые принесут только положительные эмоции.
Jasonjuido · April 24, 2023 at 1:04 pm
https://seoanalyzer.dotseotools.com/domain/kang-pro.com
borismwaice · April 24, 2023 at 1:51 pm
На сайте https://xakervip.com/topic/282/page/11/ вы сможете воспользоваться услугами хакеров, программистов по специальным ценам. Здесь вы найдете хороших специалистов, которые выполнят любые виды работ, включая взлом почты и другое. На портале вы сможете получить всю необходимую тематическую информацию, которая обязательно заинтересует. Ознакомьтесь с разделом, где присутствуют лучшие авторы. Имеются и популярные сообщения, которые будет интересно почитать и вам. На сайте получится отыскать единомышленников.
Jasonjuido · April 24, 2023 at 1:58 pm
https://app.mathewdigital.com/domain/kang-pro.com
ivangidedo · April 24, 2023 at 3:47 pm
На сайте https://shtonda.store/ вы сможете заказать выставочную, а также торговую мебель напрямую от производителя. Любой заказ, независимо от сложности, будет выполнен в течение 10 дней. Рассчитайте то, во сколько обойдутся вам работы, изучите примеры. Компания находится на рынке более 7 лет, за которые точно выучила предпочтения клиентов. Почти 500 успешно реализованных проектов. Есть возможность приобрести товар, который будет стоить намного дешевле, чем в других компаниях.
vaineror · April 24, 2023 at 9:33 pm
Строительно-монтажная компания “Геометрия” предлагает различные виды работ: строительство зданий, кровельные, ремонтные работы, демонтаж, обустройство территории. Будут оказаны услуги различной сложности, практикуется ответственное отношение к обязанностям, есть весь необходимый инструмент, а также техника, которая поможет оказать все услуги на высоком уровне. На сайте https://l59.ru вы сможете ознакомиться со всеми услугами, которые предлагает компания. В обязательном порядке на объект выезжает сотрудник.
ashaytot · April 24, 2023 at 10:14 pm
На сайте https://kamin-coldfire.ru/ вы сможете приобрести камины от производителя, а также порталы. Все они созданы из высококачественных материалов, которые невосприимчивы к агрессивным воздействиям окружающей среды, деформациям. Сейчас идет весенняя распродажа, которая позволит совершить покупку по более приятной стоимости и прямо сейчас. Вы можете позвонить сами либо заказать звонок, чтобы менеджер с вами связался, проконсультировал и ответил на все вопросы. Все камины наделены безупречным дизайном и станут яркой деталью помещения.
enalbbug · April 24, 2023 at 10:42 pm
На сайте https://m-strop.by/ приобретите текстильные, грузовые стропы, а также различные грузозахватные приспособления. Компания сама занимается производством таких конструкций, а вся продукция хранится на складе в достаточном количестве. Поэтому вы можете заказать ее в нужном объеме и прямо сейчас. Действует оперативная доставка в любой регион. Оптовые покупатели смогут воспользоваться особыми, лояльными условиями. Оплата наличным либо безналичным расчетом – доступен любой способ.
KonsAlabe · April 24, 2023 at 10:43 pm
На сайте http://ave-rs.ru/ вы можете получить всю необходимую информацию, а также оформить займ круглосуточно без посещения банка, подобрать кредит, кредитную карту или различные виды страховок. Выбрать лучшее РКО и открыть счет. Все онлайн.
Kev_Groca · April 25, 2023 at 3:29 am
https://caythuocviet.com.vn/toan-van-bo-tieu-chuan-gacp-who-2003/#comment-1242140
Annudweree · April 25, 2023 at 3:31 am
На сайте https://ege-merlin.ru/ вы сможете подготовиться к ОГЭ и ЕГЭ. Кроме того, можно пройти профориентацию. Работа с 2014 года. За все время работы почти 3 000 ребят удалось поступить в желаемое учебное заведение. Выберете курс, после чего вы сможете начать подготовку в данный момент и получить работу мечты. Подготовка происходит по авторской методике. Каждые несколько месяцев устраиваются пробные занятия. Учащимся высылаются те материалы, которые необходимы. Запишитесь и вы на бесплатную консультацию.
iyagushild · April 25, 2023 at 6:44 am
На сайте https://mathlog.ru имеется вся интересная, содержательная и качественная информация на самую разную тему, включая кино, животный мир, кулинарию. Вы научитесь готовить вкусные, ароматные и изысканные блюда, почитаете обзоры фильмов, узнаете много всего о биткоинах, секреты красоты, новости, которые касаются многих и самых разных сфер. Имеются лайфхаки, которые обязательно понадобятся вам в ежедневной рутине. Постоянно публикуется новая, занимательная информация, которая будет полезна и вам.
semilArelf · April 25, 2023 at 8:39 am
На сайте https://soccerforma.com/ вы сможете приобрести футбольную форму лучших игроков. Есть как взрослые, так и детские варианты, а потому сможете выбрать то, что нужно и прямо сейчас. К важным преимуществам интернет-магазина относят то, что здесь действует лучшая цена, а оплатить покупку можно непосредственно при получении. Если покупка не подошла, то вы можете ее вернуть. Специально для вас быстрая доставка. Для получения консультации заполните форму либо позвоните по номеру. Форма выполнена из качественных материалов, которые не линяют, на них не образуются катышки.
povagOxife · April 25, 2023 at 12:55 pm
На сайте https://remontmieleservis.ru воспользуйтесь сервисным обслуживанием, ремонтом техники MIELE. Сотрудники компании предлагают профессиональные консультации, связанные с постгарантийным ремонтом, а также профилактикой обслуживания техники таких типов, как: сушильные, стиральные машины, а также микроволновые печи, духовые шкафы, холодильники и другие. Сервисные инженеры выезжают с утра и до самого вечера, а в некоторых случаях и поздней ночью. Кроме того, компания выполняет обслуживание, диагностику крупной техники при помощи инновационного оборудования.
lovyoPailk · April 25, 2023 at 3:10 pm
На сайте https://lindeal.com/ вы сможете почитать самые последние, актуальные новости, а также публикации от профессионалов, которые отлично разбираются в той теме, на которую пишут. Именно поэтому вы сможете узнать здесь всю необходимую информацию, которая касается самых разных сфер жизни. Перед вами не только новости, но и любопытные публикации, касающиеся трендов, различных мероприятий, рейтинги, подборки книг, календарь праздников. Есть раздел с последними новостями, которые необходимо почитать всем, кто отслеживает новые данные.
khailRhync · April 25, 2023 at 3:10 pm
На сайте http://www.mospriut.com вы сможете оказать финансовую помощь, а также взять животное из приюта «Щербинка». В нем предусмотрено все необходимое для дальнейшего переезда животного. Именно поэтому в учреждении всегда комфортно, чисто и ухоженно, а самое главное, что создана приятная атмосфера, чтобы животному в нем был приятно находиться. Изучите портфолио животных и семьи, в которые они попали. В приюте есть ласковые и нежные животные, а также те, которым нужно уделить чуточку внимания.
ginovkpsync · April 25, 2023 at 5:01 pm
На сайте https://home-crimea.ru вы сможете подобрать недвижимость в Крыму: частный дом, квартиру либо коммерческое помещение. Объект будет находиться в интересном районе с развитой инфраструктурой. Позвонив по телефону, воспользуйтесь профессиональной консультацией. Кроме того, специально для вас устроят проверку документов, организуют сопровождение сделки купли-продажи. Вы сможете подобрать такой вариант, который вам идеально подойдет как для жизни, так и отдыха. Действуют самые разные расценки.
brovRcef · April 25, 2023 at 6:47 pm
Сайт https://xakervip.com/topic/282/page/11/ представляет собой форум программистов, хакеров. Здесь же вы сможете воспользоваться услугами профессионального хакера, программиста, чтобы взломать почту, вскрыть переписку или заказать другие, не менее важные услуги. На сайте находятся опытные хакеры, которые справятся с любой задачей, даже несмотря на ее сложность. Кроме того, будет оказана и такая услуга, как тайная слежка. Есть отдельный раздел с лучшими авторами, которые постоянно комментируют, оставляют свои записи.
Darrellrag · April 25, 2023 at 8:08 pm
https://alumni.unl.edu.ec/directorio/verexalumno/pAPREwssieenS1tKhRUvgiWgbBKOP513mtfLCEK-eZQ/28292/1/aHR0cHM6Ly9tb2EtZ2lmdC5jb20v/dGl0bGU9VXNlcjpBbWFkb0NyZWVyNTg1Nw1
Kev_Groca · April 25, 2023 at 8:15 pm
https://mlpconsultants.com/given-opportunity-say/#comment-644359
Darrellrag · April 25, 2023 at 8:37 pm
https://ekb.confaelshop.ru/bitrix/rk.php?goto=https://moa-gift.com/
Darrellrag · April 25, 2023 at 9:06 pm
https://www.informat.ru/bitrix/redirect.php?goto=https://moa-gift.com/
Darrellrag · April 25, 2023 at 9:36 pm
https://toolbarqueries.google.lt/url?sa=t&rct=j&q=&esrc=s&source=web&cd=4&ved=0CEcQFjAD&url=https://moa-gift.com/
Darrellrag · April 25, 2023 at 10:05 pm
https://prohairshop.ru/bitrix/rk.php?goto=https://moa-gift.com/
Darrellrag · April 25, 2023 at 10:35 pm
https://www.ofk-ozersk.ru/bitrix/rk.php?goto=https://moa-gift.com/
Darrellrag · April 25, 2023 at 11:14 pm
https://www.google.tn/url?q=https://moa-gift.com/
ifordAbeme · April 25, 2023 at 11:35 pm
На сайте https://opt-tabak.shop вы можете заказать стики, табак, а также снюс. Вся продукция безупречного качества. Можно подобрать товары с самыми разными ароматами, вкусами, чтобы получить от процесса максимальное расслабление, положительные эмоции. Также имеется и табачная продукция в большом многообразии и от самых разных брендов. А самое главное, что она оригинальная, проверенная, не принесет аллергии, вреда. Реализуется по выгодной стоимости, организуется оперативная доставка. Здесь вы сможете приобрести все, что хочется.
Darrellrag · April 25, 2023 at 11:43 pm
https://vse-svoi.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://moa-gift.com/
Darrellrag · April 26, 2023 at 12:11 am
https://images.google.bg/url?q=https://moa-gift.com/
Darrellrag · April 26, 2023 at 12:39 am
https://lipetsk.molti-shop.ru/bitrix/redirect.php?goto=https://moa-gift.com/
renatLok · April 26, 2023 at 12:42 am
На сайте https://camelotmebel.by вы сможете посмотреть все образцы качественной, красивой мебели: столов, стульев, комфортных и вместительных кухонь, пуфов и банкеток, комодов, спален. Все высокого качества и по доступным ценам. Всегда в наличии огромный выбор мебели от самых разных производителей, установлены выгодные цены. Магазин работает без выходных. На этом официальном портале вы сможете ознакомиться с полным каталогом продукции, которая отлично впишется в дизайн. Она выполнена из современных материалов, которые не синтезируют в воздух вредных веществ.
Darrellrag · April 26, 2023 at 1:07 am
https://www.tubev.sex/td24f164e52654fc593c6952240be1dc210935fe/o.php?referer=&action=just_redirect&url=http%3A%2F%2Fmoa-gift.com
Darrellrag · April 26, 2023 at 1:34 am
https://es.paltalk.com/client/webapp/client/External.wmt?url=http%3A%2F%2Fmoa-gift.com
ennofqrer · April 26, 2023 at 2:49 am
На сайте https://www.tyumen-bat.ru/ вы сможете приобрести тяговые аккумуляторы Тюменского завода для штабелеров, вилочных погрузчиков. Продукция подходит для импортной, а также отечественной техники. Продажа батарей по самым доступным ценам от производителя. Дополнительно предоставляется гарантия 3 года. Получите консультацию сейчас, просто указав номер. После этого услужливый и доброжелательный менеджер проконсультирует по всем вопросам. Есть возможность приобрести батарею самой разной мощности.
Normannof · April 26, 2023 at 4:24 am
https://seoanalyzer.digital/domain/moa-gift.com
revaqKaw · April 26, 2023 at 4:55 am
На сайте https://mangaed.ru находится огромный выбор комиксов, которые вы можете почитать на русском языке. Все они отличаются оригинальным и непредсказуемым сюжетом, а потому затянут с первых минут чтения. Комиксы погрузят вас в удивительный мир, который захочется узнать больше. Они завораживают и помогают расслабиться, на некоторое время забыть о проблемах и получить от жизни приятные впечатления. Регулярно появляются новые комиксы, которые будет интересно почитать и вам. Заходите на сайт почаще, чтобы получить больше положительных эмоций.
Normannof · April 26, 2023 at 4:58 am
https://seoanalyse.romtec.ch/en/domain/moa-gift.com/lghY63abf9da49dfd
Normannof · April 26, 2023 at 5:30 am
https://hashlin.com/seo-audit/domain/moa-gift.com
Normannof · April 26, 2023 at 6:00 am
https://analyzemy.website/domain/moa-gift.com
Normannof · April 26, 2023 at 6:30 am
https://seo.media.ag/en/domain/moa-gift.com
ladimDup · April 26, 2023 at 8:08 am
На сайте https://mirneyroseti.ru/ вы сможете почитать новости, посмотреть интересные и запоминающиеся картинки, созданные нейросетью. Это ваша уникальная возможность посмотреть на привычные вещи под другим углом. У вас получится задать все интересующие вопросы нейросети, после чего вам дадут на них ответы. Имеется контент на самые разные темы. Изучите его среди первых. И самое главное, что все публикации интересные, познавательные, оригинальные. Их приятно читать, потому как вы узнаете много нового, интересного.
Bryonsut · April 26, 2023 at 10:41 am
http://wmmoney.tforums.org/viewtopic.php?f=79&t=16993
Bryonsut · April 26, 2023 at 11:07 am
http://wladimir.5nx.ru/viewtopic.php?f=5&t=17794
Bryonsut · April 26, 2023 at 11:31 am
http://www.detiseti.ru/modules/newbb_plus/viewtopic.php?topic_id=55247&post_id=215750&order=0&viewmode=flat&pid=0&forum=13#215750
Kev_Groca · April 26, 2023 at 11:53 am
https://negaeriouzi.blog.ss-blog.jp/2018-05-28?comment_fail=1#commentblock&time=1679431719
Bryonsut · April 26, 2023 at 11:56 am
http://forum.micmedia.ru/viewtopic.php?f=7&t=7376
Bryonsut · April 26, 2023 at 12:20 pm
http://ak.liveforums.ru/viewtopic.php?id=6535#p11045
tovapKak · April 26, 2023 at 12:24 pm
На сайте https://doka-stroi.ru вы сможете оформить заявку на то, чтобы заказать ремонт или дизайн квартиры в новостройке или комнаты в жилом или коммерческом помещении. Для того чтобы ознакомиться с примерами работ, необходимо изучить портфолио. Над каждым проектом трудится команда высококлассных специалистов, которые обладают соответствующим образованием и желанием двигаться к цели. В работе применяют инновационные материалы, которые позволяют получить нужный результат. На все работы предоставляются гарантии – 3 года.
ralieovussy · April 26, 2023 at 12:45 pm
На сайте https://liranimed.ru/ оставьте заявку для того, чтобы вам подобрали сиделку для пожилого или больного человека. Она будет полностью соответствовать вашим предпочтениям и иметь медицинское образование. Работа на официальной основе, в обязательном порядке составляется договор, предоставляется полный пакет документов. Действуют доступные цены, что позволит воспользоваться услугами на любое количество времени. Весь персонал обученный, доброжелательный и работает профессионально.
Bryonsut · April 26, 2023 at 12:53 pm
https://1abakan.ru/forum/showthread-45192
Bryonsut · April 26, 2023 at 1:17 pm
http://www.autoriginal.com.ua/forum/tryop/2346-restavraciya-shub.html#post6833
itinaSat · April 26, 2023 at 1:29 pm
На сайте https://prazdnik-skazka.com/ вы сможете заказать проведение радостного, запоминающегося и яркого праздника. Специалисты проводят интересный и зажигательный мастер-класс для детишек разных возрастов. На выбор их представлено более 100. Дополнительно в компании проводятся и тематические вечеринки самого разного стиля. Организаторы праздника обязательно впишутся в ваш бюджет, чтобы предложить лучшее решение. Если будет группа от 25 человек, то предоставляется скидка. Есть возможность воспользоваться безналичным либо наличным расчетом.
Bryonsut · April 26, 2023 at 1:42 pm
https://obmenka.forum2x2.ru/t12949-topic#32221
espalDramn · April 26, 2023 at 1:46 pm
На сайте https://rusberesta.ru/ вы сможете ознакомиться с интересной и актуальной информацией, которая касается красоты, женской моды. Перед вами материалы, ценные рекомендации, которые помогут поддержать красоту, всегда выглядеть привлекательно, красиво. Имеются советы от стилистов, а также визажистов. Так вы узнаете, как сохранить кожу бархатистой, нежной, мягкой до самой глубокой старости. Имеются и бьюти-секреты, которые касаются многих. Вы узнаете о том, как правильно подобрать брюки к аксессуарам и обуви.
AnthonyUtibe · April 26, 2023 at 2:29 pm
https://andascan.com/domain/happy-moneya.com
dovaplom · April 26, 2023 at 2:32 pm
На сайте https://www.ftm.by/market-analysis/technical-analysis/ изучите технический анализ финансовых рынков. Вся информация составлена высококлассными экспертами, которые отлично знают свою работу, выполняют ее на высоком уровне, а потому создают детальный, качественный анализ, который будет интересен всем, кто каким-либо образом связан с финансовыми рынками. Если появились вопросы, их можно задать через чат и узнать все, что нужно. Нажмите соответствующую кнопку, чтобы инвестировать сейчас!
AnthonyUtibe · April 26, 2023 at 2:58 pm
http://www.websiteseo.biz/domain/happy-moneya.com
inaNabup · April 26, 2023 at 3:03 pm
На сайте https://mebel-studia.ru/ вы сможете приобрести качественную, красивую мебель, которая выполнена из современных, практичных и надежных материалов. Они не выбрасывают в воздух вредных, опасных веществ, а потому считаются антиаллергенными. В разделе представлены шкафы, комоды, а также полки, стулья, столы и многое другое для гостиной, спальни, кухни, прихожей. В магазине регулярно проходят акции, которые позволят совершить более выгодную покупку. Есть раздел с лидерами продаж, а также новинками, наиболее популярными позициями.
AnthonyUtibe · April 26, 2023 at 3:27 pm
https://ilocalreport.com.au/domain/happy-moneya.com
AnthonyUtibe · April 26, 2023 at 3:58 pm
https://www.trackes.altervista.org/domain/happy-moneya.com
AnthonyUtibe · April 26, 2023 at 4:59 pm
https://www.a2zseoaudit.com/domain/happy-moneya.com
AnthonyUtibe · April 26, 2023 at 5:39 pm
https://www.inventive9.com/seo-audit/domain/happy-moneya.com
AnthonyUtibe · April 26, 2023 at 6:11 pm
https://checkyoursites.com/domain/happy-moneya.com
JackieApomy · April 26, 2023 at 8:39 pm
медицинская книжка цена
JackieApomy · April 26, 2023 at 9:11 pm
сколько стоит медкнижка на работу
VeselUsaft · April 26, 2023 at 10:29 pm
На сайте https://glazboga.cc/ вы сможете воспользоваться всем функционалом такой уникальной и инновационной платформы, как Глаз Бога. Она отличается огромной экосистемой сервисов, инструментов. Они гарантируют информационную безопасность как юридическим, так и физическим лицам. А самое главное, что вы сможете воспользоваться большим количеством опций, которые будут вам интересны. Эта платформа сможет найти всю необходимую информацию. Основная задача – это сформировать простые, комфортные решения, отвечающие на ваш вопрос.
nerazjen · April 27, 2023 at 12:34 am
На сайте https://mirneyroseti.ru/ вы сможете почитать увлекательные, интересные, содержательные истории, созданные нейросетью. Весь материал познавательный, а потому вы почерпнете много нового, интересного. Есть запоминающиеся картинки, а также изображения, которые сопровождают текст. Регулярно публикуются новые материалы, которые будут интересны и вам. Вы узнаете и про то, как заработать на криптовалюте и другую информацию. Этот портал обязательно понравится и вам своей необычностью и оригинальной подачей материала.
yanaKpaync · April 27, 2023 at 12:53 am
На сайте https://doka-stroi.ru вы сможете заказать ремонт квартир самой разной площади, коммерческих помещений, а также дизайн интерьера, функциональные и эффективные решения для бизнеса. Над каждым проектом трудятся компетентные, квалифицированные специалисты с профильным образованием. Для выполнения работ используется инструмент, а также качественное оборудование, которое упрощает выполнение сложных работ. Все заказы выполняются максимально качественно, в ограниченные сроки.
issartof · April 27, 2023 at 1:06 am
На сайте https://zamok-ok.ru вы сможете вызвать мастера для того, чтобы он произвел вскрытие и установку замков в Калининграде. Все работы выполняются оперативно, для вас действуют скидки, приемлемые цены. В компании компетентные специалисты, у которых огромный опыт, а в арсенале имеется весь необходимый инвентарь, оборудование, которое позволяет все работы произвести быстро, точно. Компания находится на рынке с 1999 года, поэтому наработала свою клиентскую базу. Для того чтобы воспользоваться услугой, позвоните по указанному номеру.
llakoemold · April 27, 2023 at 1:11 am
На сайте https://xn—-7sba5ajdlcod1ahk.xn--p1ai/ вы сможете воспользоваться услугами бухгалтерской компании ООО «АСТ-Информ», которая находится на рынке длительное время. Ее преимуществом является то, что компания достигла определенных высот, результатов, а потому ее рекомендуют своим друзьям, близким. Важно то, что нет необходимости держать штатного сотрудника, ведь вы сможете воспользоваться услугами этой компании в любое удобное время. ООО «АСТ-Информ» является надежной и конкурентоспособной.
ulyaeRelry · April 27, 2023 at 2:19 am
На сайте https://www.jac-forklift.ru/ вы сможете заказать качественную технику для склада, которая поставляется напрямую из Китая. В каталоге вы найдете вилочные погрузчики, ричтраки, штабелеры, перевозчики паллет, тяговые батареи. На всю профессиональную технику предоставляются гарантии. Здесь же вы сможете заказать и самое разное навесное оборудование. Все запасные части всегда имеются в наличии. При необходимости возможна покупка оборудования в лизинг. Звоните и выбирайте технику, которая прослужит долго!
Kev_Groca · April 27, 2023 at 4:52 am
https://www.saoluizhotel.com.br/ola-mundo/#comment-66050
novaklTer · April 27, 2023 at 7:33 am
На сайте https://kite-shkola.ru/ вы сможете ознакомиться со всеми кайт школами, турами, местами, где сможете заняться спортом в любое время. Перед вами кайт школы России, которые работают в летний и зимний период. А еще есть кайт школы мира, которые находятся в Египте, Маврикии, Турции, Кении. А зимой поехать заняться спортом вы сможете в Маврикий, Вьетнам, Шри-Ланку. Эти места невероятно популярные среди туристов всего мира. Ознакомьтесь с информацией, которая посвящена кайтингу и другим видам спорта.
gdanokic · April 27, 2023 at 7:54 am
На сайте https://armoredwarfare.ru вы сможете заказать все необходимое для игр: прем танк, золото, командиров, приобрести премиум-статус. Продажа легальная, официальная, а потому все приобретенное гарантированно будет работать и использовано по назначению. Для того чтобы найти все, что нужно, необходимо воспользоваться специальным поиском, куда следует ввести название того, что вы хотите приобрести. Предусмотрен специальный раздел, в котором вы сможете посмотреть все свои покупки.
omovaVox · April 27, 2023 at 9:22 am
На сайте http://mat-master.ru/ вы сможете воспользоваться такой нужной услугой, как аренда грязезащитных ковриков. В комплекс услуг входит их полное обслуживание. Заказать их можно в торговые, промышленные предприятия, спортивные, учебные заведения, гостиницы, в офис либо домой. Изделия очень прочные, надежные, износоустойчивые, удерживают различную уличную грязь, лишнюю жидкость, особенно если на улице сыро и дождь. Коврики обеспечат защиту, а также чистоту в помещении. Для заказа позвоните по обозначенному номеру.
Victornaift · April 27, 2023 at 10:50 am
https://lor-center74.ru/
akoroCoops · April 27, 2023 at 11:17 am
На сайте https://markettours.kz вы найдете туры в самые разные города. Кроме того, получится в 2 счета отыскать комфортабельный отель в различных странах. К самым популярным направлениям относят: ОАЭ, Мальдивы, Турцию, Египет, Таиланд и другие. Для того чтобы рассчитать стоимость, необходимо обозначить дату выезда и приезда, количество человек, которое должно полететь. Регулярно на сайте проходят акции, действуют скидки, чтобы сделать путешествие более выгодным. Вы сможете забронировать горящие туры по самым привлекательным расценкам.
anovaIdiop · April 27, 2023 at 4:32 pm
На сайте https://avanchange.com/ вы сможете обменять валюту. Здесь же получится купить Эфириум, Биткоин, Monero и другое. Кроме того, есть возможность совершить обмен электронных денег. Регулярно добавляются новые направления обменника, чтобы вы смогли выполнить все необходимые действия прямо в эту минуту. Кроме того, на сайте описывается и способ покупки биткоина. Это очень просто сделать. Система позволяет скорректировать курс в том случае, если имеются скачки. Только здесь самый выгодный обмен, а сайт работает круглосуточно.
Kev_Groca · April 27, 2023 at 4:35 pm
http://cyklon-td.ru/index.php/component/k2/item/8
EdgarSaw · April 27, 2023 at 5:36 pm
https://carmentamed.ru/
levaeTiz · April 27, 2023 at 5:49 pm
На сайте http://intro-tech.ru вы сможете приобрести качественное, надежное и практичное оборудование для деревообработки, производства мебели. Компания находится на рынке уже давно, а потому заполучила огромное количество постоянных клиентов. Она нацелена на долгосрочное сотрудничество и индивидуальную работу с каждым клиентом. Квалифицированные, компетентные сотрудники отличаются богатым опытом. Вы сможете воспользоваться полным комплексом услуг, потому как специалисты стремятся получить нужный результат.
Gianniempixelm · April 27, 2023 at 8:42 pm
official website
EvdokLIG · April 27, 2023 at 9:53 pm
На сайте https://meow-kids.ru вы сможете приобрести детскую обувь, одежду, а также аквачешки. Все изделия выполнены из натуральных, антиаллергенных материалов, а потому не доставят дискомфорта, не натрут, отлично циркулируют воздух, а потому малышу будет удобно в них находиться. Здесь же вы сможете заказать сандалии и многое другое по самым привлекательным расценкам. Регулярно проходят акции, распродажи, которые позволят сделать покупку более приятной.
asiliybum · April 28, 2023 at 12:38 am
На сайте https://kimonomarket.ru/ вы сможете приобрести комфортное, удобное и практичное кимоно не только для взрослых, но и детей. Здесь же продаются и пояса для дзюдо. Специально для вас установлены привлекательные расценки, доступна оперативная доставка. Все кимоно качественное, произведено из натуральных, «дышащих» материалов, которые не портятся при регулярных стирках, на них не образуются катышки. Представлены варианты самых разных брендов и различного ценового диапазона.
lageyheabe · April 28, 2023 at 1:45 am
На сайте https://proxy-solutions.net/en приобретите персональные прокси в разном количестве. Есть возможность выбрать любой пакет, который вам точно подойдет. Имеются персональные прокси, стоимость которых от 40 рублей. Есть пакетные, а также PRIME ПРОКСИ, которые обойдутся вам всего от 100 рублей в месяц. Сделать выгодную покупку вы сможете сейчас. Поддержка сервиса осуществляется круглосуточно, а потому воспользоваться им сможете прямо сейчас. Все цены, установленные на сайте, максимально низкие.
terovQuinc · April 28, 2023 at 2:18 am
На сайте http://mwstanki.ru/ вы сможете приобрести станки, различный функциональный инструмент, а также запчасти. Все оборудование является инновационным, высокотехнологичным, качественным, произведено зарубежными, проверенными марками. Кроме того, оказываются услуги, связанные с ремонтом, обслуживанием техники. Все это по доступным, привлекательным расценкам. С полным ассортиментом продукции ознакомьтесь в каталоге. При необходимости станок подберет для вас менеджер за несколько минут.
rishinaamima · April 28, 2023 at 3:15 am
На сайте https://mpmgr.ru вы сможете воспользоваться услугами менеджера маркетплейсов для таких сайтов, как Ozon и Wildberries. Сервис создан для того, чтобы вы смогли грамотно управлять рекламой, бронировать поставки, а также отвечать на вопросы и выполнять все, что нужно для того, чтобы правильно вести бизнес. Кроме того, получится рассчитать скидки, отследить поступление товаров. Сейчас есть возможность попробовать программу абсолютно бесплатно. Важным моментом является то, что вы сможете оптимизировать рекламу и сэкономить примерно до 60% бюджета.
sevamElimi · April 28, 2023 at 8:28 am
На сайте https://ruchkin.ru/ вы сможете заказать ручки в огромном ассортименте и самой разной цветовой гаммы. Перед вами продукция различных брендов, которые создают товар безупречного качества. А самое главное, что каждая ручка отличается длительным сроком службы. Есть возможность оформить доставку в любой регион. На всю продукцию даются гарантии качества. При появлении вопросов вы сможете их быстро решить, если зададите компетентным менеджерам. Все заказы будут выполнены максимально оперативно.
lfbdwVal · April 28, 2023 at 10:18 am
На сайте https://camera39.ru/ вы сможете приобрести камеры видеонаблюдения, видеорегистраторы, комплекты видеонаблюдения, различные комплектующие. Вся продукция проверенных, надежных и лучших брендов, которые положительно себя зарекомендовали. В компании можно заказать и сервисное обслуживание, а также монтаж, воспользоваться профессиональными консультациями. Вся продукция отвечает высоким требованиям безопасности, обеспечивается оперативная доставка. Всегда доступны большие скидки, регулярно проходят акции.
rasilnglurb · April 28, 2023 at 10:39 am
На сайте http://fravol.ru/ вы сможете приобрести кромко-облицовочные станки с различными типами клея. Имеются автоматические станки самых разных серий, а также изделия с ручной подачей. Выбирайте то, что требуется для вашего бизнеса. При необходимости профессиональную консультацию вам предоставит квалифицированный менеджер, который даст ценные рекомендации, советы, поможет подобрать нужный товар. Кроме того, вы сможете изучить всю необходимую информацию, касающуюся станков. Она поможет сделать правильный выбор.
CharlesAnarf · April 28, 2023 at 5:50 pm
шумоизоляция для студии звукозаписи
CharlesAnarf · April 28, 2023 at 6:46 pm
звукоизоляция стен под штукатурку
pustiAvalo · April 28, 2023 at 6:56 pm
На сайте http://flashner.ru/ вы сможете заказать внешние аккумуляторы, пластиковые флешки, металлические флешки, а также из дерева. При покупке варианта из дерева вы сможете получить коробочку в подарок. Вся продукция хранится на складе в нужном количестве. А еще есть топ продаж – товары, которые приобретаются регулярно и в большом количестве. Есть возможность заказа товаров в самые разные регионы. На каждом этапе производства они проходят проверку. По телефону горячей линии вам будет оказана поддержка.
iyasawep · April 28, 2023 at 7:06 pm
На сайте https://metamask.rip/ вы сможете воспользоваться программным криптовалютным кошельком, который, как утверждают сами разработчики, является абсолютно безопасным. Он обеспечивает доступ к своему кошельку при помощи расширения браузера. Уникальная программа генерирует ключи, действует локально. Биржа дает возможность отправлять, а также получать средства. Это ваш надежный помощник в мире финансов. Важным моментом является то, что установить кошелек вы сможете 3 разными способами. Это не вызывает сложностей.
karovamami · April 28, 2023 at 7:14 pm
На сайте https://magictouch.studio/ вы сможете записаться по телефону на такую нужную и важную услугу, как лазерная эпиляция. Вы получите эстетическое наслаждение своей кожей, ведь она будет невероятно гладкой, нежной, мягкой. Мастер работает на инновационном, высокотехнологичном оборудовании, которое позволит получить результат очень быстро и по разумной стоимости. Все косметологи отличаются высшим образованием, огромным опытом работы. Несколько тысяч клиентов уже воспользовались услугой.
CharlesAnarf · April 28, 2023 at 7:43 pm
шумоизоляция труб
vomirdoure · April 28, 2023 at 8:10 pm
На сайте https://lords.black/ вы сможете посмотреть интересные, увлекательные фильмы, а также новые сериалы и те, которые пользуются огромной популярностью. Здесь также находятся и различные мультфильмы, которые точно вам понравятся. Для того чтобы найти определенный фильм, необходимо просто вбить название, после чего система предложит вариант. Среди огромного количества фильмов вы точно найдете что-то оригинальное, то, что подойдет для просмотра на вечер. Все они в отличном качестве и с хорошим звуком, многоголосым переводом.
CharlesAnarf · April 28, 2023 at 8:40 pm
самодельная шумоизоляция стен
CharlesAnarf · April 28, 2023 at 9:37 pm
шумоизоляция для ванны стальной купить
natedvet · April 29, 2023 at 5:24 am
На сайте https://pragmatic-play.pro/ вы сможете сыграть в самый популярный и один из интересных слотов, который есть в мире. Любой автомат, представленный здесь, отличается особой уникальностью и креативностью. Именно эти особенности так привлекают пользователей по всему миру. Этот провайдер не применяет однотонные, скучные дисплеи, а, наоборот, не перестает радовать публику креативным подходом. На этом портале вы сможете провести свой досуг именно так, как хочется. Да еще и с пользой для себя, ведь здесь вы сможете еще и хорошо заработать.
vcevaPiz · April 29, 2023 at 6:23 am
На сайте https://it-offshore.com/ вы сможете зарегистрировать оффшорную компанию всего за 400 евро. Компания находится на рынке длительное время, а потому знает все нюансы работы. Компетентные менеджеры помогут с оформлением документов, дадут ценные рекомендации, советы. Все услуги проводятся строго под ключ. Вы получите не только компанию, но еще и счет в банке, либо мерчант-аккаунт плюс компанию и счет. Если вас интересует данная тема, то подпишитесь на новости, чтобы получать свежую информацию. Ознакомьтесь с полным списком партнеров.
Thomasspeet · April 29, 2023 at 8:37 am
казино драгон мани регистрация
Thomasspeet · April 29, 2023 at 8:48 am
драгон мани
Thomasspeet · April 29, 2023 at 10:29 am
кэшбэк драгон мани как получить
Thomasspeet · April 29, 2023 at 10:40 am
казино драгон мани
etkovnen · April 29, 2023 at 1:05 pm
На сайте https://mr-shrus.ru/ вы сможете подобрать автозапчасти, получить профессиональные рекомендации, а также советы для диагностики. Всегда в наличии около 1000 автозапчастей, а также аксессуаров от именитых брендов, которые создают надежную и качественную продукцию для всех. По городу Иваново действует бесплатная доставка. Перед вами большой выбор запчастей на заказ и на самые разные марки. Приобретая запчасти здесь, вы сможете сэкономить время и средства. Если не удалось отыскать нужный товар, то обязательно позвоните по телефону.
izagrBuict · April 29, 2023 at 4:31 pm
На сайте https://meow-kids.ru приобретите детскую одежду, обувь, которая подходит для самых маленьких. Вся она прошла необходимые клинические исследования, тестирования, а потому считается абсолютно безопасной, высокого качества, а также антиаллергенной. Важно то, что вещи не натирают, не доставляют дискомфорта, хорошо сидят на ноге. Обувь украшена стильными декоративными элементами, которые добавляют ей особого очарования. Здесь также находятся и аквачешки. Регулярное обновление коллекции.
Thomasspeet · April 30, 2023 at 1:51 pm
драгон мани официальный сайт
Thomasspeet · April 30, 2023 at 1:59 pm
казино драгон
Bryonsut · April 30, 2023 at 5:24 pm
https://www.liveinternet.ru/users/nuucha/post498725450
Bryonsut · April 30, 2023 at 6:15 pm
http://forum.procapitalist.ru/showthread.php?p=48392#post48392
EvRtgklsf#blanick[Xetoruxoxupujyb,3,12] · April 30, 2023 at 6:58 pm
Experience the ultimate blend of taste and quality with [url=https://pablo-snus.info/]pablo snus[/url] – the perfect snus for any occasion! Our flavors are carefully curated to give you a unique and unforgettable snus experience. Join our community of snus lovers and discover the endless possibilities of snus today!
Bryonsut · April 30, 2023 at 7:01 pm
https://tenderstroi.ru/forum/prochie-voprosy/22096-pereshiv-shub-v-moskve
BdNxYw56Ben · April 30, 2023 at 7:47 pm
Experience the exceptional taste of [url=https://pablo-snus.online/]pablo snus[/url] and explore our unique range of flavors! From classic to bold, each blend is crafted to perfection, making your snus indulgence even more delightful.
Bryonsut · April 30, 2023 at 7:48 pm
https://www.kharkov-balka.com/showthread.php?p=138536#post138536
Bryonsut · April 30, 2023 at 8:34 pm
http://mirmamok.ru/forum/posts/315135
ArwZnGxkbeesK · April 30, 2023 at 9:00 pm
Experience the rich and satisfying world of [url=https://pablo-snus.shop/]pablo snus[/url]. Our premium collection of flavors is sure to please even the most discerning snus connoisseurs. From classic tobacco to refreshing mint, we have something for everyone. Join the snus community today and indulge in the ultimate best snus experience!
Bryonsut · April 30, 2023 at 9:19 pm
http://www.diablomania.ru/forum/showthread.php?p=412083#post412083
Bryonsut · April 30, 2023 at 10:03 pm
https://drs-club.ru/f/viewtopic.php?f=2&t=3768
Bryonsut · April 30, 2023 at 10:47 pm
https://ulyanovsk.forumchik.ru/viewtopic.php?id=457#p2063
Bryonsut · April 30, 2023 at 11:30 pm
https://home.forum2x2.ru/t23190-topic#127909
QjsEwrnkbug · May 1, 2023 at 12:02 am
Experience the bold and unique flavors of [url=https://pablo-snus.site/]pablo snus[/url]. Our premium collection of snus products is made with only the finest ingredients, ensuring an unforgettable snus experience. Whether you’re a seasoned snus enthusiast or new to the world of snus, we have something for everyone. Join our community today and discover the ultimate snus experience!
Bryonsut · May 1, 2023 at 12:15 am
http://forum.computest.ru/post/374097/#p374097
Bryonsut · May 1, 2023 at 12:59 am
http://www.autoriginal.com.ua/forum/tryop/2404-pereshiv-shub-v-moskve.html#post6952
BhJxKjledaymn · May 1, 2023 at 1:00 am
Step into the world of [url=https://pablo-snus.space/]pablo snus[/url] and discover a new level of snus experience with our premium collection of flavors. From traditional to modern, we have something for everyone. Join our community of snus enthusiasts today and be a part of the ultimate snus adventure!
Bryonsut · May 1, 2023 at 1:43 am
http://mironline.getbb.ru/viewtopic.php?f=31&t=31184
ThoTGgmasnuh · May 1, 2023 at 2:28 am
Discover an exciting world of taste with our exclusive [url=https://pablo-snus.xyz/]pablo snus[/url] selection! Indulge in bold flavors and join a thriving community of snus aficionados.
Bryonsut · May 1, 2023 at 3:08 am
https://ratingforex.ru/forum-forex/viewtopic.php?f=17&t=26582&sid=8fff3be2b7c40cc4e9049c6854f9f6e4
Bryonsut · May 1, 2023 at 3:49 am
http://aromatov.wooden-rock.ru/forum/topic.php?forum=1&topic=10579
Bryonsut · May 1, 2023 at 4:31 am
http://baikal-biz.ru/forum/viewtopic.php?f=15&t=19414
Bryonsut · May 1, 2023 at 5:56 am
https://spshn.ru/plugins/forum/forum_viewtopic.php?292208.0#post_292208
Bryonsut · May 1, 2023 at 6:36 am
https://www.izhforum.info/forum/izhevsk/viewtopic.php?f=26&t=141399
Bryonsut · May 1, 2023 at 7:18 am
https://www.informetr.ru/forum/viewtopic.php?pid=2759729#p2759729
Rogerjoits · May 1, 2023 at 8:56 am
https://seoanalyse.romtec.ch/en/domain/pl.reduslim.health/0jyy644f237b8b1a8
Rogerjoits · May 1, 2023 at 9:49 am
https://seoreport.steveshaw.me/domain/reduslim.at
Rogerjoits · May 1, 2023 at 10:42 am
https://urlseoanalyzer.com/domain/de.reduslim.health/wYtb644ecb157a9b1
Rogerjoits · May 1, 2023 at 11:36 am
https://seoanalyzer.pro/domain/reduslim.at
Rogerjoits · May 1, 2023 at 12:34 pm
https://www.w3era.com/website-seo-analyzer/domain/ro.reduslim.health
Rogerjoits · May 1, 2023 at 1:31 pm
https://seoanalysis.eu/en/domain/reduslim.health
Rogerjoits · May 1, 2023 at 2:28 pm
https://seo-checker.in/domain/hu.reduslim.health
BriBdull#randnick[Paxivugujazuplu,2,5] · May 1, 2023 at 2:36 pm
Experience the diverse world of [url=https://snus1.co/]snus[/url] with our exquisite range of flavors that cater to every taste bud!
KatBriVul#randnick[Juyemukyjovacse,3,6] · May 1, 2023 at 2:52 pm
Discover the unique and exciting world of [url=https://snus1.gay/]snus[/url] with our exclusive range of flavors that will leave you wanting more!
Rogerjoits · May 1, 2023 at 3:22 pm
http://cz.reduslim.health.sitescorechecker.com/
Rogerjoits · May 1, 2023 at 4:16 pm
https://tengoweb.net/en/domain/cz.reduslim.health
Rogerjoits · May 1, 2023 at 5:10 pm
https://mysiterank.org/de/domain/ro.reduslim.health
Rogerjoits · May 1, 2023 at 6:03 pm
https://siteintel.net/en/domain/pl.reduslim.health
Rogerjoits · May 1, 2023 at 6:55 pm
https://audit.aaravinfotech.com/domain/de.reduslim.health
Rogerjoits · May 1, 2023 at 7:49 pm
https://seoprofitmaximiser.com/website-reviewer/domain/pl.reduslim.health
ThoTGgmasnuh · May 1, 2023 at 7:52 pm
Immerse yourself in the captivating [url=https://pablo1.art/]pablo[/url] world and enjoy a remarkable selection of exquisite snus flavors!
MnIiPkwbzKALL · May 1, 2023 at 7:58 pm
Discover the delicious world of [url=https://pablo1.bio/]pablo[/url] and elevate your taste buds with our scrumptious menu!
Rogerjoits · May 1, 2023 at 8:42 pm
https://scorank.com/fr/domain/gr.reduslim.health
Rogerjoits · May 1, 2023 at 9:34 pm
https://www.trackes.altervista.org/domain/hu.reduslim.health
Rogerjoits · May 1, 2023 at 10:28 pm
https://seoreport.site/domain/ro.reduslim.health
Rogerjoits · May 1, 2023 at 11:22 pm
https://siteintel.net/en/domain/cz.reduslim.health
MleXzazfhagesy · May 1, 2023 at 11:58 pm
Get ready to indulge in the amazing world of [url=https://pablo1.live/]pablo[/url]! Our premium collection of flavors is sure to satisfy your cravings and leave you wanting more. Join our community today and experience the best that [url=https://pablo1.live/]pablo[/url] has to offer!
BajFZfmphTor · May 1, 2023 at 11:58 pm
Get ready to immerse yourself in the delicious world of [url=https://pablo1.gay/]pablo[/url]! Our premium flavors are sure to leave you craving for more. Join our community now and explore the best [url=https://pablo1.gay/]pablo[/url] experience!
FhoMzyxzvProot · May 2, 2023 at 12:03 am
Are you ready to explore the vibrant world of [url=https://pablo1.ink/]pablo[/url]? Our premium flavors are sure to tantalize your taste buds and leave you wanting more! Join our community now and experience the best [url=https://pablo1.ink/]pablo[/url] has to offer!
Rogerjoits · May 2, 2023 at 12:18 am
https://analizador-web.tutorialesenlinea.es/domain/cz.reduslim.health
Rogerjoits · May 2, 2023 at 1:13 am
https://www.freewebsiteanalyse.com/domain/reduslim.at
Rogerjoits · May 2, 2023 at 2:08 am
https://www.mahoo.org/domain/gr.reduslim.health
Rogerjoits · May 2, 2023 at 3:02 am
https://seoanalyse.romtec.ch/en/domain/it.reduslim.health/Ozh0644ec92e16441
Rogerjoits · May 2, 2023 at 3:57 am
https://www.freewebsiteanalyse.com/domain/hu.reduslim.health
Rogerjoits · May 2, 2023 at 4:51 am
https://seochecks.co.uk/en/domain/gr.reduslim.health/oxtG644ea8405dada
Rogerjoits · May 2, 2023 at 5:46 am
https://theseoauditor.com/domain/pl.reduslim.health
Haroldcap · May 2, 2023 at 6:36 am
такси межгород
Haroldcap · May 2, 2023 at 7:09 am
трансфер ижевск
nkobrken · May 2, 2023 at 8:34 am
На сайте https://www.imperiasinteza.by вы сможете позвонить, чтобы записаться в Центр развития. Он предлагает воспользоваться такими услугами, как сенсорная интеграция, логопедия, массаж, йога, пилатес, остеопатия. Дополнительно оказывает услуги в сфере продвижения сайтов. В компании работают компетентные, квалифицированные сотрудники, которые очень быстро решат вашу проблему. Кроме того, будет разработано индивидуальное решение для вас. Почитайте больше нужной информации на страницах портала.
BapluKof#lexnick[Bvjllmezfagvxtju,2-5] · May 2, 2023 at 8:46 am
Experience the unique and delicious flavors of [url=https://snus1.gay/]snus[/url], crafted to perfection and available exclusively at our store!
sV7mR8tN#ennick[Ilovuryxohohyfd,2,5] · May 2, 2023 at 12:19 pm
Get ready to experience the delicious and unique flavors of [url=https://pablo1.space/]pablo snus[/url] like never before! Our premium range of snus is sure to cater to all your snus cravings and elevate your snus experience. Join our community today and be a part of the world of pablo snus!
ZasUIeuuingergy · May 2, 2023 at 6:18 pm
Step into the enchanting world of [url=https://pablo1.shop/]pablo[/url] and discover a breathtaking collection that celebrates the true essence of beauty and elegance!
GluFIrlRounlill · May 2, 2023 at 6:20 pm
Discover a world of tantalizing flavors with [url=https://pablo1.xyz/]pablo[/url]. Our premium collection is sure to delight your taste buds and satisfy your cravings!
MaTJyGde#genname[Gaxyrybesryhow,2,5] · May 2, 2023 at 11:34 pm
Discover the beauty of the ocean with [url=https://pablo.yachts/]pablo[/url] – your ultimate yachting partner. Our luxurious yachts and unparalleled service will make your sailing experience unforgettable.
GoVFbYbo#genname[Hynyjopebyju,2,5] · May 2, 2023 at 11:42 pm
Explore the world with [url=https://pablo1.wiki/]pablo[/url]. Our travel guides and recommendations will help you plan the perfect trip and make unforgettable memories.
obylesoaph · May 3, 2023 at 1:01 am
На сайте https://xn--80aaahhzpb3afeew2ad.xn--p1ai/ приобретите упаковку с оперативной доставкой для предприятий общепита, компаний, которые занимаются приготовлением продуктов питания, а также предпринимателей. В каталоге находятся контейнеры для продуктов, банки, пластиковые ведра, ланчбоксы, подложки. Также представлены и салфетки, бумажные полотенца, кассовая лента. Компания заботится о комфорте каждого клиента. По этой причине доставка осуществляется на своем транспорте.
itstepPrors · May 3, 2023 at 1:15 am
На сайте https://okna-group-avangard.ru/ вы сможете заказать монтаж окон ПВХ, которые созданы из качественных, надежных и практичных материалов, которые прослужат в течение долгого времени. Конструкции соответствуют самым высоким требованиям, созданы по ГОСТу. При необходимости вам будет оказана и профессиональная консультация. Специалисты создают окна самых разных конфигураций, в том числе, и на нестандартные дверные проемы. Конструкции поддержат оптимальный микроклимат, помогут сохранить тепло.
zlovvAbisa · May 3, 2023 at 1:48 am
На сайте https://firstskupka.ru/ вы сможете выгодно продать технику: ноутбуки, смартфоны iPhone, фототехнику, игровые приставки, планшеты, музыкальное оборудование и многое другое по привлекательным ценам. При этом средства выдаются сразу. Сотрудничество простое: вам необходимо назначить место встречи, после чего специалист приедет в указанное время. Он осмотрит вещь, согласует стоимость. Если обе стороны все устроило, то заключается договор, после чего вся сумма выдается на руки.
irbesartan otc · May 3, 2023 at 1:59 am
spiriva pharmacy spiriva 9 mcg pharmacy cheapest spiriva
fonovgeows · May 3, 2023 at 5:56 am
На сайте https://okna-group-avangard.ru закажите установку надежных и качественных окон, которые отличаются высоким качеством, а самое главное, что они прослужат длительное время. Они наделены качественной и функциональной фурнитурой. Принимаются заявки и на выполнение нестандартных заказов. Но в любом случае качество останется на высоком уровне. При необходимости сотрудники дадут рекомендации, помогут с выбором. Выбирайте такие конструкции, которые поддержат необходимый микроклимат в помещении.
iktorsCop · May 3, 2023 at 6:39 am
На сайте https://doverie-svoboda.ru/ запишитесь на консультацию для того, чтобы выполнить такую важную и нужную для некоторых категорий граждан услугу, как банкротство. Персональный эксперт по банкротству поможет вам решить все вопросы, справиться с долгами, а потому у вас начнется новая жизнь! Вы будете снова строить планы и радоваться каждому дню. Но для этого необходимо только связаться со специалистом, который даст ценные рекомендации. Деятельность компании основывается на таких важных принципах, как: честность, доверие, открытость.
MaTJyGde#genname[Gaxyrybesryhow,2,5] · May 3, 2023 at 9:18 am
Tutustu [url=https://niikotinipussit.art/]niikotinipussit[/url] -sivustoon ja loyda laaja valikoima laadukkaita nikotiinipusseja. Nauti nopeasta toimituksesta ja erinomaisesta asiakaspalvelusta.
evaNiboymn · May 3, 2023 at 9:44 am
На сайте https://www.syshik.ru/ вы сможете воспользоваться профессиональными, качественными услугами частного детектива Олега Викторовича Пытова. У него высшее юридическое образование, а все работы выполняются в рамках закона. Среди основных услуг выделяют поиск людей, сбор информации, разрешение семейных конфликтов, проверку данных. Честный, достоверный материал сможет защитить от ошибок, увеличит безопасность. Кроме того, оказываются услуги юридическим лицам. Опыт работы более 25 лет.
nazaKex · May 3, 2023 at 12:03 pm
На сайте https://studio-mint.ru/ вы сможете заказать обратный звонок для того, чтобы воспользоваться услугами опытного дизайнера студии дизайна интерьеров. Компания оказывает такие важные и нужные услуги, как: дизайн квартир, коттеджей, создание коммерческих интерьеров. В портфолио находится огромное количество работ, а ознакомиться с ними сможете и вы. В комплекс услуг входит проектирование коттеджей, домов, ремонт домов, квартир. Специалисты выполняют и закупку материалов, занимаются созданием мебели на заказ.
QzPdNhyr#genname[Texycezysyfy,2,5] · May 3, 2023 at 12:48 pm
Haluatko kokeilla [url=https://niikotinipussit.gay/]nikotiinipussit[/url]? Tarjoamme monipuolisen valikoiman eri makuja ja vahvuuksia, joiden avulla voit loytaa itsellesi miellyttavan vaihtoehdon perinteisille tupakkatuotteille. Tilaa nyt ja nauti nopeasta toimituksesta seka erinomaisesta asiakaspalvelusta.
Isiahkag · May 3, 2023 at 3:12 pm
http://instukzia.com/23945-glavnye-preimuschestva-kreditnyh-kart-i-ih-rabota.html
Isiahkag · May 3, 2023 at 3:27 pm
http://ecohouse.info/sovety/debetovye-karty-trebovaniya-vidy-i-sovety-po-vyboru.html
horovraise · May 3, 2023 at 7:02 pm
На сайте https://kioff.ru/ вы сможете посмотреть любимый фильм или ожидаемую новинку, которая обязательно произведет на вас эффект. Перед вами как зарубежные, так и отечественные фильмы, посмотреть которые вы сможете прямо сейчас. Здесь также есть сериалы, аниме, мультфильмы, различные шоу-программы, новинки. Представлена подборка лучших сериалов российского, американского, турецкого производства. Все фильмы в отличном качестве и с хорошим звуком, а потому просмотр доставит только радость.
gorevEcomo · May 3, 2023 at 10:13 pm
Сервисный центр «PrintMasters» предлагает свои услуги, связанные с ремонтом струйных, лазерных принтеров, плоттеров. Услуги оказываются с выездом либо непосредственно в офисе. В компании установлены небольшие расценки, при этом качество остается на стабильно высоком уровне. На сайте https://pmasters.ru/ изучите то, какие модели можно отремонтировать в компании. Вы всегда сможете воспользоваться профессиональными консультациями. В компании дают гарантию на работу в 6 месяцев.
orovaBed · May 3, 2023 at 10:18 pm
На сайте https://studio-mint.pro/ можно изучить всю необходимую информацию, которая касается студии дизайна интерьеров в Нью-Йорке. Компания выполняет такие услуги, как: ремонт, дизайн, а также комплектация интерьеров. Все работы компания берет на себя и с нуля. Квалифицированные специалисты с огромным опытом решают даже самые сложные вопросы и справляются с ними на высоком уровне. Работы выполняются в минимальные сроки, по доступной стоимости. Изучите портфолио, чтобы примерно ознакомиться с тем, как работают сотрудники.
vaRimphodo · May 4, 2023 at 1:13 am
По ссылке https://travellis.ru/ вы найдете информацию о путешествиях, туризме и отдыхе. Имеются интересные сведения о национальной кухне, о том, как необходимо применять грязелечение, чтобы оно подействовало и принесло пользу. Имеются статьи, касающиеся Индонезии. Вы узнаете много полезного материала, касающегося отдыха, досуга и оздоровления, кулинарного туризма. Есть данные о нюансах аренды автомобилей за рубежом. Изучите интересные советы, которые помогут вам в путешествии и ответят на многие вопросы.
grigorlal · May 4, 2023 at 7:06 am
На сайте https://skupkaserebra.kz вы сможете уточнить номер телефона для того, чтобы узнать цену, по которой вы сможете сдать радиодетали, серебро. В компании принимают: конденсаторы, разъемы, микросхемы, резисторы, диоды, переключатели и многое другое по хорошей стоимости. Выкупаются и такие детали, в которых содержатся драгоценные металлы. Полный перечень деталей, которые принимаются компанией, указан на сайте. Оценка осуществляется максимально быстро и независимым экспертом. Предлагается хорошая сумма.
lmarlrem · May 4, 2023 at 7:17 am
На сайте https://jerl.ru/ вы сможете приобрести ноутбуки, компьютеры, наушники, а также мониторы. Все это от популярных, зарекомендовавших себя марок, которые производят действительно качественную, практичную продукцию с длительным эксплуатационным сроком. Вы сможете воспользоваться оперативной доставкой по Москве. Если появились вопросы, то задайте их оператору, который всегда на связи. В течение 2 недель сможете вернуть товар, если не подошел. Воспользуйтесь любыми видами оплаты. Также есть возможность приобрести игровые клавиатуры.
avlovcuche · May 4, 2023 at 8:28 am
На сайте https://ururuanime.online/ вы сможете посмотреть аниме, которое представлено здесь в огромном многообразии. У всех японских мультиков разнообразный сюжет, который обязательно вам понравится своей неповторимостью. Вы можете не только просматривать, но и делиться комментариями. Вы обязательно найдете аниме, которое можно будет посмотреть сегодня вечером. А перед этим почитайте описание, которое поможет сделать правильный выбор. Ознакомьтесь с сюжетом и героями, чтобы понять, подходит ли вам аниме.
aLeoncargy · May 4, 2023 at 4:20 pm
На сайте https://arendayachtsochi.com/blog/vierf-glastron/ вы сможете получить всю необходимую и исчерпывающую информацию, которая касается верфи Glastron. На страницах портала отмечена и история компании, то, как ее создали. Есть информация, касающаяся достоинств лодок, выпущенных этой компанией. Все полученные данные обязательно вам пригодятся. Если предстоит морская прогулка, то смело выбирайте те модели, которые созданы данной верфью. Есть материал о том, какими лодки были в начале и как они преобразовались в наши дни.
arlendeT · May 4, 2023 at 6:35 pm
На сайте https://sup-na-neve.ru/ вы сможете ознакомиться и заказать САП прогулки по рекам и каналам Санкт-Петербурга и озерам Ленинградской области с опытными инструкторами и полным снаряжением. Абсолютно подходит для новичков. Разные маршруты. Зайдя на сайт вы сможете ознакомиться с расписанием, а также купить подарочные сертификаты. Современный парк надежных сап досок.
illlazaNosse · May 4, 2023 at 6:53 pm
На сайте https://www.balt-pallet.ru/ вы сможете заказать деревянные поддоны, паллеты на самых выгодных условиях и от производителя. Можно приобрести как абсолютно новые изделия, так и б/у. К важным преимуществам компании является собственное производство, а также доступные, привлекательные расценки. Воспользуйтесь оперативной доставкой. Перед вами самые разные варианты, любых размеров. У паллет нет заусенцев, гвоздей, которые могут повредить упаковку. Доставка осуществляется в день оформления заказа.
vvalmDem · May 4, 2023 at 8:50 pm
На сайте https://na-more-v-crimea.ru/ почитайте интересную, увлекательную информацию о Крыме. Опубликован материал о самых интересных местах, туристических маршрутах, памятниках древности. Все это поможет лучше ознакомиться с полуостровом и получить огромное количество положительных эмоций. Есть информация, касающаяся пляжей Крыма. На портале опубликованы и важные, ценные рекомендации, которые пригодятся туристам, которые планируют приехать сюда отдыхать. Многие статьи сопровождаются картинками для наглядности.
levaGFak · May 4, 2023 at 9:00 pm
На сайте https://podshipnik.info/ находится самый полный каталог подшипников. Здесь вам окажут поддержку в выборе, продаже. Доставка происходит по всей стране. Перед вами ни одна сотня наименований. При этом в разделе находятся исключительно лучшие, проверенные бренды, которые реализуют надежную, качественную продукцию. Эту компанию выбирают из-за того, что она предлагает гарантии на все товары, огромный ассортимент. При желании воспользуйтесь комфортным поиском, а также оперативной обратной связью.
ZcNhFsmg#genname[Fypynyzo,2,5] · May 4, 2023 at 10:18 pm
Onko sinulla jo kokemusta [url=https://niikotinipussit.store/]nikotiinipusseist[/url]? Tarjoamme laajan valikoiman erilaisia makuja ja vahvuuksia, jotka ovat terveellinen vaihtoehto perinteisille tupakkatuotteille. Meilta loydat varmasti suosikkimakusi ja voit samalla vahentaa tupakoinnin haittoja. Tilaa nyt ja hyodynna nopea toimituksemme seka ammattitaitoinen asiakaspalvelumme.
olaivBrale · May 4, 2023 at 10:32 pm
На сайте https://lilibum.ru вы сможете познакомиться с интересными людьми, завести знакомства, пообщаться с тем, кто вам действительно интересен и даже получить от процесса много положительных эмоций. Общайтесь с противоположным полом, назначайте свидания, делитесь впечатлениями и рассказывайте о себе больше информации, чтобы произвести впечатление на понравившегося человека. На этом сайте вы точно найдете того, кто сможет коснуться струн души. Знакомьтесь для создания крепких отношений или приятного времяпрепровождения.
QzPdNhyr#genname[Texycezysyfy,2,5] · May 5, 2023 at 1:23 am
Are you interested in trying out [url=https://disposable-vape.club/]disposable vape[/url]? We offer a diverse selection of flavors and strengths, making it easy for you to find a satisfying alternative to traditional tobacco products. Place your order now and enjoy fast shipping and excellent customer service.
ilnikosteab · May 5, 2023 at 4:50 am
На сайте https://23rusgus.ru/ вы сможете ознакомиться с полным ассортиментом и купить Гусеницы для мини экскаваторов и мини погрузчиков с быстрой доставкой по России. Компания Столица Юг надежный поставщик качественных гусениц TRELLEBORG и CAMSO со склада в Краснодаре, Москве, Новосибирске. На складе всегда и запчасти для спецтехники мировых брендов.
minAnsat · May 5, 2023 at 5:38 am
На сайте https://etor-kazaki.ru/ находятся казаки туфли, полусапоги, сапоги летние, зимние, а также чопперы, мотообувь. Вся продукция реализуется по привлекательным ценам, с оперативной доставкой, а потому совершить выгодную покупку сможете и вы прямо сейчас. На портале также имеется и кожаная одежда, модные и стильные аксессуары, футболки и многое другое. Обязательно ознакомьтесь с новостями, которые точно будут интересны и вам. Есть раздел с горячими новинками, а также по лучшей цене.
dorChSmity · May 5, 2023 at 8:14 am
По ссылке https://videozz.ru/ вы сможете узнать телефон, чтобы позвонить и заказать яхту на прогулку либо праздник. Вы сможете подобрать подходящий вариант как по размеру, так и стоимости. Но если вы хотите взять яхту в аренду, то необходимо в обязательном порядке учитывать самые разные факторы. Что касается расценок, то на их формирование влияет класс, размер, а также интервал, на который вы планируете арендовать судно. Если вам необходима профессиональная консультация, то позвоните по обозначенному номеру.
QzPdNhyr#genname[Fozyhiwi,4,7] · May 5, 2023 at 8:15 am
Looking for a new way to enjoy nicotine? Look no further than [url=https://disposable-vape.ink/]disposable vape[/url]. Our wide selection of flavors and strengths ensures that you’ll find a satisfying alternative to traditional tobacco products. Order now and enjoy fast shipping and excellent customer service.
egnewmyday · May 5, 2023 at 9:18 am
На сайте https://xn--37-dlci2d.xn--p1ai/ вы сможете изучить график работы, а также посмотреть телефон компании для того, чтобы заказать рукава высокого давления, обжим РВД, фитинги, шланги, муфты для РВД для вашего бизнеса. Специально для вас организуется оперативная доставка. Сейчас действует скидка – 10% на товар. Если вы нашли дешевле, то обратитесь в компанию для того, чтобы вам сделали скидку. Вы можете лично убедиться в том, что продукция высокого качества. Ознакомьтесь со всем каталогом, чтобы выбрать наиболее стоящие позиции.
ovlibestync · May 5, 2023 at 10:20 am
На сайте https://zabor-euroshtaketnik.ru/ вы сможете заказать производство, а также монтаж заборов, которые произведены из металлического штакетника. На установку дается гарантия в 2 года. На сайте вы сможете ознакомиться с выполненными проектами. Этапы монтажа включают: консультацию, замер, а также выбор штакетника. Представлено 7 видов, которые доступны для заказа прямо сейчас. Получите смету с ценами на материалы, а также работы, запчасти и многое другое. Имеются как бюджетные, так и более дорогие варианты.
Williammap · May 5, 2023 at 11:33 am
http://betot.ru/liga/user/JolifBahdy/ путаны челябинска
PhajApgempiply · May 5, 2023 at 11:58 am
Experience the tantalizing world of the finest [url=https://snus1.live/]snus[/url] varieties and flavors, carefully crafted to satisfy your cravings and elevate your senses to a whole new level!
Williammap · May 5, 2023 at 12:44 pm
https://school97.ru/forum/view_profile.php?UID=159293 секс за деньги в челябинске
Williammap · May 5, 2023 at 1:39 pm
http://www.biodat.ru/cgi/mwf/user_info.pl?uid=32452;sid=67c15f814181022a218e13d495edbc20 любые проститутки челябинска
chevbMop · May 5, 2023 at 2:11 pm
Сайт https://lingolink.ru/ представляет собой сервис, предназначенный для сокращения ссылок. Все, что вам необходимо сделать, – это вставить ссылку, после чего нажать кнопку, чтобы ее сократить. При необходимости воспользуйтесь расширенными настройками, которые предоставят вам больше возможностей. Короткие ссылки потребуются и для умного таргетинга, проведения глубокой аналитики, а также распределения трафика. Этот сервис максимально простой, понятный и функциональный, а потому воспользоваться им сможет каждый.
Williammap · May 5, 2023 at 2:33 pm
http://luch.ru/profile.php?lookup=49659 сайт с проститутками челябинска
inapaMor · May 5, 2023 at 3:00 pm
Лавка лекаря в Екатеринбурге https://ekblekar.info/ это огромный ассортимент товаров для оздоровления на натуральной основе и активного долголетия. Собственное производство натуральных средств. Работает оптовый отдел для покупателей со всей страны. Удобный интернет магазин позволяет покупать товары не выходя из дома. Также вы можете купить и приобрести фермерские продукты и диетическое питание.
Williammap · May 5, 2023 at 4:23 pm
https://www.darkside.ru/forum/memberlist.php?mode=viewprofile&u=135537&t=666 реальные проститутки челябинска
Jackiekah · May 5, 2023 at 5:33 pm
webcams cairo
Jackiekah · May 5, 2023 at 6:27 pm
russian cams
imsysNeame · May 5, 2023 at 6:40 pm
На сайте https://proflifter.ru/ вы сможете приобрести грузоподъемное складское оборудование от проверенных, надежных и зарекомендовавших себя производителей. Они создают товары высокого качества, а также надежную, практичную продукцию, наделенную длительным эксплуатационным сроком. Перед вами только выгодные предложения, действует система скидок, дарятся подарки. Можно воспользоваться доставкой в лизинг. Ознакомьтесь с хитами продаж, которые приобретают многие предприятия.
povIsEteft · May 5, 2023 at 6:46 pm
На сайте https://storkland.ru/ вы сможете взять в аренду самые разные детские товары: коляски, автокресла, снегокаты, санки, коньки, лыжи, ватрушки. Все товары перед тем, как попасть другому покупателю, проходят обработку, поэтому можете не сомневаться в безопасности и высоком качестве. Ознакомьтесь с разделом, в котором находятся популярные товары, которые пользуются спросом у большинства. У компании огромный опыт работы в данном направлении, а потому сотрудники обязательно подберут то, что вам нужно.
Jackiekah · May 5, 2023 at 7:23 pm
new york cameras
niyalifruri · May 5, 2023 at 8:03 pm
На сайте https://www.informteh.ru вы сможете заказать проектирование, а также установку, сервисное обслуживание систем вентиляции, кондиционирования, обогрева помещений. Предприятие считается официальным дистрибьютором техники, которая реализуется напрямую от производителя по доступным ценам и с оперативной доставкой. Действуют особые условия покупки. При необходимости всегда можно проконсультироваться у квалифицированных менеджеров. Дополнительно на сайте можно изучить полезные и информативные тематические статьи.
Bryonsut · May 6, 2023 at 12:03 am
http://www.pets-ural.ru/content/forum/viewtopic.php?t=14957
Bryonsut · May 6, 2023 at 12:44 am
http://wladimir.5nx.ru/viewtopic.php?f=5&t=17580
ryginshusy · May 6, 2023 at 1:06 am
На сайте https://450700.ru/ вы сможете заказать такую услугу, как прокат и аренда авто. Регулярно компанией устраиваются скидки, акции, действует система дисконтных карт. Если решите обратиться повторно, то сможете рассчитывать на скидку в 10%. Работа по официальному договору. Ознакомьтесь со всем парком машин, которые вы сможете взять напрокат прямо сейчас. Вас обрадуют привлекательные расценки, профессиональные консультации. Каждый автомобиль прошел тщательный контроль, ТО перед рейсом.
Bryonsut · May 6, 2023 at 1:25 am
https://club4x4.ru/forum/viewtopic.php?f=17&t=79385
Bryonsut · May 6, 2023 at 2:10 am
http://forum.analysisclub.ru/index.php/topic,63348.new.html#new
Bryonsut · May 6, 2023 at 2:54 am
http://center-2.ru/forum/?mingleforumaction=viewtopic&t=6029#postid-12036
enafedron · May 6, 2023 at 6:10 am
На сайте http://zestpromotion.ru вы сможете заказать такую услугу, как проектирование и строительство выставочных стендов, оформление мест продажи, где основной задачей является привлечение интереса потенциальных клиентов. Талантливые специалисты компании берутся и за разработку фотозоны, автомобильных подиумов. В обязательном порядке разрабатывается уникальная концепция и учитывается сфера деятельности. В компании оформляют и телевизионные студии, осуществляют застройку конференций.
isiiOrThork · May 6, 2023 at 6:46 am
На сайте https://fyndament-plita.ru/ вы сможете воспользоваться такой важной и нужной услугой, как фундамент плита под ключ. Работы выполняются не только по Москве, но и области. У каждого специалиста высшее профильное образование, огромный стаж работы в данной сфере. Она выполняется точно в обозначенные сроки, качественно, круглый год. Для этого имеется весь необходимый инвентарь, инструмент. Работа точно по договору, установлены разумные расценки. Если появились вопросы, то вы сможете их задать профессиональному менеджеру, который ответит на них.
edvedgek · May 6, 2023 at 7:13 am
На сайте https://akbwiki.ru/ находится вся необходимая информация, касающаяся того, как правильно «прикуривать» автомобиль, какие батарейки для часов существуют. Описываются характеристики, типы, таблицы, способы замены. Также есть и информация о батарейках, которые стоят в газовой колонке. Кроме того, есть данные, касающиеся видов, типов батареек, предназначенных для слуховых аппаратов. Сведения про зарядные устройства, гибридные аккумуляторы. Все статьи полезные и помогут разобраться в теме.
sovaniCrink · May 6, 2023 at 1:36 pm
На сайте http://kurbobrembo.ru/kotyata-dlya-rezerva/ вы сможете зарезервировать котенка с родословной. Есть как котики, так и кошечки полудлинношерстные. Можно зарезервировать как взрослого представителя кошачьих, так и малыша. Он принесет счастье в ваш дом, ведь хорошо подружится как со взрослыми, так и детьми. Вы можете зарезервировать котика прямо сейчас, чтобы, когда он подрастет, взять его в свою семью. Ознакомьтесь с тем, как котодети приживаются в других семьях. На портале также имеются и различные статьи на данную тему. Почитайте их, чтобы получить исчерпывающую информацию.
senovMex · May 6, 2023 at 1:42 pm
На сайте https://sup-na-neve.ru вы сможете записаться на удивительные и эксклюзивные сап-прогулки, которые доставят море положительных эмоций, приятных впечатлений. Вы устроите путешествие по городским каналам вместе с опытным и компетентным инструктором, который имеет соответствующую подготовку. Расценки на прогулки остаются на должном уровне, а потому устроить их сможет каждый желающий. Необходимо лишь выбрать подходящую дату и время для организации яркого досуга. Это ваш шанс ознакомиться с Питером в новом формате.
nauigKag · May 6, 2023 at 1:54 pm
На сайте https://shemi-otopleniya.jimdo.com/ можно приобрести под заказ гибкую подводку из нержавеющей стали самого разного размера, дюйма и модификации. На сайте получите всю исчерпывающую информацию о такой продукции, ознакомьтесь с техническими характеристиками, а также фотографиями и другой нужной информацией, включая правильную установку комплектующих и многое другое. Гибкая подводка считается универсальным материалом, а потому точно прослужит более 70 лет из-за того, что она устойчива к появлению коррозию, вредному воздействию окружающей среды.
vaioalar · May 6, 2023 at 2:26 pm
На сайте https://numerolog56.ru/ вы сможете узнать интересную, познавательную информацию о нумерологии, различных болезнях, когда и за что они даются, про планеты и варны. Имеется информация о деньгах, финансах, карме, матрице судьбы, персональных данных и многом другом. Вы обязательно отыщите такую тему, которая будет интересна. Важно то, что статьи написаны экспертами – они публикуют только ту информацию, в которой разбираются сами и желают поделиться ей с вами. Все материалы содержательные, информативные, а потому вы почерпнете много нового.
Lorentek · May 6, 2023 at 3:19 pm
https://ruforma.info/kakie-usloviya-dlya-skupki-platiny-i-rekomendaczii.html
Lorentek · May 6, 2023 at 4:08 pm
http://rem-kvart.ru/
evaElMum · May 6, 2023 at 9:07 pm
На сайте http://epil-m.ru вы сможете записаться на такую важную для красоты процедуру, как электроэпиляция. Такой метод считается единственно верным и приносит долгосрочный эффект по сравнению с другими. При этом процедура обойдется вам недорого, а записаться на нее вы сможете в любое наиболее комфортное для себя время. Эта методика является абсолютно безопасной и не приносит нежелательного эффекта. Может применяться на самых разных участках тела. Ознакомьтесь с расценками на манипуляции прямо сейчас.
inogrScarl · May 6, 2023 at 9:25 pm
На сайте http://zestpromotion.ru закажите производство фотозон, автомобильных подиумов, различных выставочных стендов и многого другого. Сотрудники компании смогут оформить шоурумы, торговые точки. Специально для вас подберут уникальный проект, составят его с учетом предпочтений, требований, особенностей вашей сферы деятельности. Именно поэтому результат вас точно впечатлит. Производственный отдел предпримет все возможное для того, чтобы стенд привлек внимание и подчеркнул особенности, достоинства вашего бренда.
gordetah · May 6, 2023 at 10:52 pm
На сайте http://psikhoanaliz.ru запишитесь на профессиональную консультацию к психологу, который ответит на все вопросы, поможет принять правильное решение и больше не переживать из-за ситуации. А самое главное, что специалист не будет давать оценку вашим действиям. Он внимательно вас выслушает и сделает так, чтобы подтолкнуть к правильному решению вопроса. У вас появится возможность справиться с теми ситуациями, которые тревожили вас на протяжении длительного времени. Психолог – профессиональный специалист, который обладает надлежащим опытом.
asevasob · May 6, 2023 at 10:54 pm
На сайте https://fundament-plita.ru/ закажите фундамент плиту под ключ. Специалисты отличаются высокой квалификацией, а работы выполняют в строго оговоренное время, отсутствуют простои, опоздания. Работа на совесть, заключается официальный договор. Для выполнения задачи имеется весь необходимый инвентарь, оборудование. Чуть ниже представлены расценки в соответствии с типом фундамента. Если и вам нужен фундамент плита, то укажите свой номер, чтобы менеджер вам перезвонил и предложил лучший вариант.
riiIvaflite · May 7, 2023 at 12:00 am
На сайте https://militaryprint.ru/ вы сможете приобрести стильные футболки, свитшоты и другую одежду, выполненную в военной тематике. На ней изображены слова поддержки, красочные тематические принты, которые помогут приблизить победу. Вся одежда выполнена из качественных износостойких тканей, которые не утратят внешний вид в течение длительного времени и после множества стирок, краски не поблекнут, сохранят яркость и интенсивность. Именно поэтому вы сможете носить вещь долго. На сайте установлены оптимальные расценки, а потому можно приобрести сразу несколько моделей.
eniraMwonia · May 7, 2023 at 5:25 am
На сайте https://sulyaev.ru/ вы сможете получить контактные данные, телефон психоаналитика Андрея Суляева. Он сможет очень быстро, буквально за несколько приемов решить очень сложные проблемы, которые тревожат вас сейчас. Работа со взрослой аудиторией и в индивидуальном порядке. Это позволит установить необходимый контакт. На портале также представлены и различные нужные материалы на тему психологии. Если нужно, то психолог с радостью ответит на все вопросы, которые вы зададите. Почитав информацию на портале, вы получите ответы на все свои вопросы.
adimirhex · May 7, 2023 at 8:03 am
На сайте https://venttehnica.ru/ ведется продажа кондиционеров, инфракрасных обогревателей, промышленных кондиционеров, тепловых завес, конвекторов и многого другого. На определенные товары всегда действует акция, которая позволит совершить приобретение по наименьшей стоимости, сэкономив семейный бюджет. Ознакомьтесь с полным каталогом продукции, чтобы совершить выгодное приобретение. Есть раздел с популярными товарами, которые приобретает большинство. В магазине установлены доступные расценки, действует быстрая доставка.
aumovrob · May 7, 2023 at 8:08 am
На сайте https://profobus.ru/kursy-programmirovanie/ представлены самые проверенные и надежные курсы по программированию. Все онлайн-заведения, которые представлены здесь, практикуют качественное обучение, а потому вы сможете рассчитывать на безупречное образование. Рейтинг строился на основе мнения большинства, а потому ему точно можно доверять. Всего на сайте представлено более тысячи курсов, где обучают с нуля, в рассрочку, а также с трудоустройством. Количество звездочек означает рейтинг заведения.
aritasLag · May 7, 2023 at 8:45 am
Компания «ПАРКМОТОРС» продает различные комплектующие напрямую со склада и на Газель, различную другую грузовую технику. На сайте https://parkmotors.ru/ вы сможете получить всю необходимую информацию, которая касается покупки запчастей. Все они реализуются по привлекательным расценкам, за счет того, что сотрудничество происходит напрямую. Всегда в наличии шины, представленные от зарубежных, отечественных марок. В тематических разделах находится сцепление на технику Газель от популярного турецкого, немецкого производителя.
LewisEmoto · May 7, 2023 at 10:01 am
потолки столица
LewisEmoto · May 7, 2023 at 10:55 am
Натяжные потолки столица
LewisEmoto · May 7, 2023 at 11:48 am
https://uslugi.yandex.ru/profile/StolicaPotolki-2379973
LewisEmoto · May 7, 2023 at 12:41 pm
столица потолки
brownref · May 7, 2023 at 1:19 pm
На сайте http://psikhoanaliz.ru вы сможете записаться на прием ко врачу, а также ознакомиться с различной нужной информацией по теме. Так вы узнаете о том, что собой представляет индивидуальная, семейная терапия, в каких случаях потребуется подростковый психолог. Если вы обратитесь за помощью и поддержкой к специалисту, то сможете надеяться на доверительные, честные и прозрачные отношения. Вы разберетесь в своей ситуации, найдете выход из нее. Профессиональный психолог точно знает, как вам помочь, найдет слова поддержки, он не берется оценивать ситуацию.
cozaar 50 mg without a prescription · May 7, 2023 at 1:25 pm
pioglitazone australia pioglitazone 15 mg over the counter pioglitazone without a prescription
LewisEmoto · May 7, 2023 at 1:37 pm
потолки столица
LewisEmoto · May 7, 2023 at 2:32 pm
Столица натяжные потолки
LewisEmoto · May 7, 2023 at 3:27 pm
Натяжные потолки столица
LewisEmoto · May 7, 2023 at 4:26 pm
https://moscow.spravkarf.ru/firm/stolica-potolki
oszimdar · May 7, 2023 at 5:23 pm
На сайте https://profobus.ru/kursy-marketing/ вы сможете ознакомиться с увлекательными, интересными и содержательными курсами по обучению интернет маркетологов. Перед вами 764 курса, которые дадут вам все необходимые знания. При необходимости можно отфильтровать по таким параметрам, как: профессия с нуля, с трудоустройством, рассрочкой. Для того чтобы подобрать оптимальный вариант, необходимо ввести направление деятельности. Все курсы по доступной цене. А потому если и вы решили освоить новую профессию, то обязательно запишитесь на курсы.
LewisEmoto · May 7, 2023 at 5:42 pm
потолки столица
selezgoday · May 7, 2023 at 6:16 pm
На сайте https://metropolstroy.ru/ вы сможете заказать обратный звонок для того, чтобы воспользоваться такими услугами, как ремонт квартир, коттеджей, штукатурка стен, алмазная резка бетона. Все услуги оказываются на высоком уровне, качественно, в минимальные сроки, точно по ГОСТу, в соответствии с нормативами. Именно поэтому результат получается таким, как вы и ожидали. Компания занимается проектированием объектов, а также оформлением перепланировки. Даже несмотря на то, какой планируется ремонт, специалисты виртуозно с ним справятся.
LewisEmoto · May 7, 2023 at 6:42 pm
потолки столица
LewisEmoto · May 7, 2023 at 7:43 pm
Натяжные потолки столица
LewisEmoto · May 7, 2023 at 8:44 pm
https://stolicapotolki.n4.biz/contacts
vamirflomb · May 7, 2023 at 9:01 pm
На сайте https://taplink.cc/spiritualtransformation вы сможете ознакомиться с информацией и исцелиться у духовного наставника и учителя, проводника любви Творца. Уже сотни людей смогли ощутить то, что сеансы этого специалиста действительно помогают, исцеляют и возвращают к жизни. Он наделен удивительной силой, даром, который помогает справляться даже с самыми сложными случаями. Иногда, даже там, где традиционная медицина оказывается бессильна, Святослав Залесский сможет справиться с проблемой в 2 счета.
lshakoBeapy · May 7, 2023 at 10:01 pm
Сервис http://shikarnos.ru/ представляет собой сайт, созданный для быстрого поиска упоминаний на различных ресурсах, сайтах, блогах, СМИ. Для того чтобы начать работать, необходимо лишь выбрать тип продукта: поиск клиента, мониторинг упоминаний, отслеживание групп. Программа составлена лучшими специалистами, которые помогут добиться именно того результата, которого вы ожидали. Ознакомиться с тарифами вы сможете прямо сейчас. Подберите оптимальный для себя вариант, чтобы узнать о том, где вы или ваш бренд упоминается.
LewisEmoto · May 7, 2023 at 10:59 pm
Натяжные потолки столица
LewisEmoto · May 7, 2023 at 11:58 pm
столица потолки
LewisEmoto · May 8, 2023 at 12:59 am
столица потолки
LewisEmoto · May 8, 2023 at 2:00 am
Столица натяжные потолки
dimZuArith · May 8, 2023 at 2:41 am
На сайте https://profobus.ru/dizayn/ вы сможете ознакомиться с курсами по дизайну. Перед вами 35 лучших из них. Еженедельно информация о заведениях обновляется, вносятся дополнения для того, чтобы вы быстрей сориентировались в выборе и записались на занятия. Почитайте более подробную информацию о каждой школе, чтобы иметь представление о том, как она выполняет обучение. В каждой компании преподают лучшие учителя с огромным опытом. У всех школ разный интервал обучения, а потому вы обязательно подберете то, что вас устроит.
LewisEmoto · May 8, 2023 at 3:00 am
Столица натяжные потолки
trentCes · May 8, 2023 at 7:25 am
На сайте https://krasnodar.climateon.ru/ вы сможете купить в городе Краснодар кондиционеры и климатическую технику с доставкой и установкой. У нас в наличие все типы систем кондиционирования и вентиляции от оконных и мобильных кондиционеров до мульти-сплит, мульти-зональных (VRF/VRV) и полупромышленных систем.
BrianReami · May 8, 2023 at 8:58 am
Натяжные потолки столица отзывы
Adonisempixelm · May 8, 2023 at 9:33 am
pop over to this site
BrianReami · May 8, 2023 at 9:44 am
столица потолки отзывы
BrianReami · May 8, 2023 at 10:30 am
отзывы потолки столица
BrianReami · May 8, 2023 at 11:07 am
столица потолки отзывы
BrianReami · May 8, 2023 at 11:09 am
отзывы потолки столица
ridroHoupe · May 8, 2023 at 12:04 pm
На сайте http://utmmetki.store/ вы сможете получить руководство по UTM меткам. Вас ожидают правильные метки, а также генератор. Для того чтобы воспользоваться сервисом, необходимо ввести URL адрес, определиться с источником трафика и другими параметрами. Следует ввести как обязательные, так и необязательные параметры. Далее останется лишь скопировать полученный результат. Все максимально просто. В статье рассказывается обо всех нюансах, которые будут вам важны. Необходимо их учесть в своей работе.
nfilonnit · May 8, 2023 at 12:47 pm
На сайте https://kitt-nn.ru/ вы сможете заказать спецодежду рабочую, а также для занятий охотой, туризмом, рыбалкой. Все изделия отличаются безупречным уровнем комфорта, безопасности, выполнены из современных, надежных материалов, которые невосприимчивы к агрессивным факторам внешней среды. В разделе вы также найдете СИЗ, медицинскую одежду, а также средства для защиты рук. Ознакомьтесь со всем каталогом изделий, чтобы сделать правильный выбор. Обязательно ознакомьтесь с прайс-листом для того, чтобы заказать все, что вам необходимо.
pahomcicky · May 8, 2023 at 1:40 pm
На сайте https://galaxyswapper.ru/ вы сможете получить доступ к скинам в игре Fortnite сейчас. Важным преимуществом портала является то, что ПО создают первоклассные разработчики, которые используют в своей работе уникальные технологии – они работают на результат. Сотрудники предпринимают все возможное для того, чтобы вам нравилось находиться на сайте, вы им активно пользовались и могли играть в любимые игры. Испытайте всю мощь на себе. Все, что вам необходимо – это просто скачать приложение и начать свою игру.
BrianReami · May 8, 2023 at 2:27 pm
Натяжные потолки столица отзывы
BrianReami · May 8, 2023 at 4:30 pm
Натяжные потолки столица отзывы
BrianReami · May 8, 2023 at 5:17 pm
отзывы потолки столица
BrianReami · May 8, 2023 at 5:46 pm
отзывы потолки столица
BrianReami · May 8, 2023 at 6:39 pm
Столица натяжные потолки отзывы
BrianReami · May 8, 2023 at 9:29 pm
столица потолки отзывы
BrianReami · May 8, 2023 at 10:06 pm
https://yandex.ru/profile/215799382186
BrianReami · May 8, 2023 at 10:16 pm
Натяжные потолки столица отзывы
BrianReami · May 8, 2023 at 10:21 pm
столица потолки отзывы
BrianReami · May 8, 2023 at 10:35 pm
https://www.youtube.com/@stolica-potolki
yachkDrobe · May 8, 2023 at 10:38 pm
Сайт https://video-camer.ru представляет собой интернет-магазин товаров, предназначенных для видеонаблюдения. Перед вами только качественная, надежная техника, которая работает точно и бесперебойно. И самое главное, что она представлена именитыми брендами, которые отвечают за качество товаров. В разделе имеется продукция для видеонаблюдения, автомобильные товары, а также металлоискатели, диктофоны, микрофоны, плееры и многое другое. Вся продукция реализуется по доступной стоимости.
orgalAnaft · May 8, 2023 at 11:25 pm
На сайте https://zhana-credit.kz/ вы сможете воспользоваться услугами автоломбарда. Важным моментом является то, что оценка происходит по максимуму, при этом ставки минимальные. Нет необходимости составлять договор купли-продажи. Все сотрудничество осуществляется на максимально выгодных, прозрачных условиях. Кредиты под залог авто выдаются всего лишь за несколько минут. Не потребуется справка о доходах. Получить кредит очень просто. Для этого необходимо лишь оставить заявку, после чего менеджеры перезвонят вам для подтверждения.
evanaSmilt · May 9, 2023 at 4:23 am
Надежные и высококачественные тяговые аккумуляторные батареи 24 вольта для складской техники теперь доступны на сайте https://toyota-akb24v.ru/ Выбирайте тяговые аккумуляторные батареи 24 вольта для вилочных погрузчиков, штабелеров и электротележек Toyota. Мы гарантируем быструю доставку и высокий уровень сервиса
gertkAgilm · May 9, 2023 at 6:46 am
На сайте https://xn--37-dlci2d.xn--p1ai/ закажите обжим РВД, фитинги, шланги, муфты для РВД. Работы под ключ для бизнеса. Специально для вас действует оперативная доставка. Если вы нашли расценки ниже, то эта компания готова предложить лучшие условия. При наличии вопросов задайте их по телефону, чтобы получить исчерпывающую консультацию. Убедитесь сами в том, что все изделия надлежащего качества. В разделе имеются рукава в сборе. Изучите весь каталог продукции, чтобы подобрать оптимальное для себя решение.
BvXnFmth#genname[Zedeholakeci,2,5] · May 9, 2023 at 8:01 am
Ready to try a new vaping experience? Check out our selection of [url=https://disposable-vapes.ink/]disposable vapes[/url], offering a variety of flavors and strengths to suit your taste. From fruity to savory, we have something for everyone. Our disposable vapes are also a convenient and hassle-free option for those on the go. Try them out now and enjoy the satisfaction of high-quality products and excellent customer service.
anholnuh · May 9, 2023 at 9:03 am
На сайте http://vivagifts.ru вы сможете заказать ручки с логотипом. Все они высокого качества и реализуются по доступной стоимости, а потому сделать приобретение смогут все желающие. В разделе также представлены и металлические, а также деревянные флешки. Минимальные сроки выполнения заказа. Гравировка выполняется за пару дней. Есть возможность оформить заказ всего за сутки после того, как он поступил в работу. Для выполнения заказа используется собственное инновационное оборудование. Оно позволяет браться за работу различного уровня.
Alfredodox · May 9, 2023 at 4:59 pm
http://svoimi-rukamy.net/
Alfredodox · May 9, 2023 at 5:47 pm
http://no-lamer.ru/leto-idealno-vremya-dlya-tura-po-kurilskim-ostrovam/
IsabellaKaunisHamara[ktGHjaBn] · May 9, 2023 at 8:28 pm
Koe [url=https://nikotiinipussi.space/]nikotiinipussi[/url]-maailman eri tuotteiden kirjo laajassa valikoimassamme!
aricept without a prescription · May 9, 2023 at 8:58 pm
geodon 80mg without a doctor prescription cheapest geodon geodon pills
ovaglShefe · May 9, 2023 at 9:53 pm
Сайт https://cerial.online/ представляет собой самый полный сборник сериалов, на котором собраны фильмы различных жанров. Они понравятся всем без исключения, а особенно тем, кто обожает просматривать интересные фильмы, наслаждаться качеством картинки и звуком. Здесь наиболее полный перечень сериалов, которые вы сможете посмотреть в любое время. Просто начните воспроизведение того момента, на котором вы остановились в прошлый раз, чтобы продолжить просмотр. Регулярно на портал добавляются новинки, которые будут интересны и вам.
IsabellaKaunisHamara[ktGHjaBn] · May 9, 2023 at 11:26 pm
Tutustu [url=https://nikotiinipussit.ink/]nikotiinipussit[/url]-maailman monipuolisiin tuotteisiin laajassa valikoimassamme!
dovpudrele · May 10, 2023 at 2:07 am
Сайт https://dom-plenki.ru/ представляет собой подробный справочник, на котором находятся компании, которые продают упаковочный материал, а также тару в огромном ассортименте. Предприятия отсортированы по городам, районам. Для того чтобы подобрать подходящий вариант, необходимо изучить телефон, адрес, а также карту проезда. Все это поможет принять правильное решение. При необходимости вы можете оставить комментарий, написать отзывы, чтобы другой человек оперативно сориентировался.
JeffreyceP · May 10, 2023 at 5:20 am
труба для дымохода купить
JeffreyceP · May 10, 2023 at 6:07 am
купить мебель московская область
IdaValloittavaSade[gtNMfbYd] · May 10, 2023 at 10:46 am
Tutustu [url=https://nikotiinipussit.us/]nikotiinipussit[/url]-maailman laajaan tuotevalikoimaan!
BsQdMhyr#genname[Ixyjazysyfy,2,5] · May 10, 2023 at 4:45 pm
Thinking about transitioning to [url=https://disposable-vape.us/]disposable vapes[/url]? Our comprehensive range includes a multitude of flavors and nicotine strengths. Order today for swift delivery and top-notch customer service.
CornellBoX · May 10, 2023 at 6:03 pm
Посмотрите интересное видео бассейн каркасный Спасибо Вам
aharosusIa · May 10, 2023 at 8:26 pm
На сайте https://shemi-otopleniya.ru/ вы сможете почитать информацию, касающуюся гибкой подводки из нержавеющей стали и сделать заказ. Все изделия различной модификации, разного диаметра, размера, что даст возможность выбрать вариант, исходя из целей, задач покупки. Здесь представлены все исчерпывающие данные, которые помогут принять решение. Ознакомьтесь со всем списком продукции, которую вы сможете приобрести прямо сейчас. Под заказ купите рукав высокого давления, элеваторный узел, а также медные трубы и многое другое.
FsUdQhyr#genname[Mxyldzysyfy,2,5] · May 11, 2023 at 6:06 am
Are you considering a switch to [url=https://disposable-vapes.bio/]disposable vapes[/url]? Our extensive selection of flavors and nicotine strengths is sure to cater to your preferences. Order today for speedy delivery and superior customer service.
NordicFun#genname[AbCdEfGhIj,2,5] · May 11, 2023 at 1:09 pm
Inject some fun into your nicotine experience with [url=https://nordic-spirit.fun/]nordic spirit[/url]. Our nicotine pouches are not just about the nicotine, they’re about enjoying the moment and having a great time.
OnlineSpirit#genname[VwXyZaBc,2,5] · May 11, 2023 at 3:30 pm
Experience the convenience of [url=https://nordic-spirit.online/]nordic spirit[/url] online. Enjoy the finest nicotine pouches delivered straight to your doorstep.
NordicXYZ#genname[RstUvXyz,2,5] · May 11, 2023 at 7:10 pm
Dive into the [url=https://nordic-spirit.xyz/]nordic spirit[/url] world of nicotine pouches with our varied range of products.
NordicYacht#genname[KlmNopQr,2,5] · May 11, 2023 at 7:13 pm
Embark on the [url=https://nordic-spirit.yachts/]nordic spirit[/url] journey of nicotine pouches with our exclusive yacht collection.
ZynBioFan#genname[XyZaBc,2,8] · May 11, 2023 at 11:43 pm
Enter the remarkable world of [url=https://zyn1.bio/]zyn[/url], your go-to for cutting-edge nicotine pouches. Experience unmatched flavor profiles and a superior nicotine experience that sets Zyn1 apart.
ZynFunster#genname[AbCdEfGhIj,3,7] · May 11, 2023 at 11:51 pm
Dive into the exciting world of [url=https://zyn1.fun/]zyn[/url], your ultimate destination for fun and unique nicotine pouches. Experience an adventure of taste and a nicotine experience that sets Zyn1 apart.
XtdfBdzdfinnagt · May 12, 2023 at 1:02 am
Best site from all Apes and original [url=https://nftmonkey1.net/]NFT Monkey[/url].
rasovaKab · May 12, 2023 at 9:13 am
На сайте https://remont.antishop.kz/ вы сможете заказать такую нужную услугу, как ремонт, а также обслуживание оргтехники в Астане. Специально для вас возможно оперативное выполнение всех работ. Именно поэтому мастер прибудет на объект в течение часа, произведет все необходимые работы. При этом специалист, если поломку нельзя устранить на месте, отвезет технику в офис. Вы получаете возможность воспользоваться как наличным, так и безналичным расчетом. В обязательном порядке заключается договор на оказание услуги.
XtdfBdtdfinnagt · May 12, 2023 at 11:44 am
Best site from all Apes. Primates and original [url=https://nftmonkey1.com/]NFT Monkey[/url].
WayneRef · May 12, 2023 at 12:06 pm
Watch an interesting video – how to draw sunflowers step by step. Thank you
aritancah · May 12, 2023 at 12:38 pm
На сайте https://lovely-professional.ru вы сможете приобрести составы для ламинирования ресниц, а также краску для бровей, ресниц и различную другую продукцию, которая поможет сделать взгляд более выразительным и роскошным. На портале также имеются и различные расходные материалы, а также сопутствующая атрибутика, которая потребуется для создания привлекательного образа. И самое главное, что вся продукция качественная, сертифицированная, не вызывает аллергии. Регулярно на портале появляются новинки, которые понравятся и вам.
Zyn1SitePromoter#genname[AbCdEfGhIj,2,5] · May 12, 2023 at 12:43 pm
Dive into the [url=https://zyn1.site/]zyn[/url] journey and unveil a new world of nicotine pouches at Zyn1 Site. Uncover Zyn secrets and join our engaging community.
erkuskes · May 12, 2023 at 1:02 pm
На сайте https://bytovka-dacha.ru/ вы сможете заказать качественные, надежные бытовки, которые будут созданы в соответствии с вашими предпочтениями, запросами, а также целями. Внутри них всегда комфортно и уютно, современная отделка. Есть возможность заказать бытовку самого разного размера и модификации. Ознакомьтесь с доступными вариантами на сайте. В компании вы сможете заказать как металлические, так и деревянные бытовки, а также такие услуги, как монтаж, перевозка, сборка бытовок. Все это выполняется квалифицированными, компетентными специалистами, которые прошли соответствующее обучение.
orawrigslump · May 12, 2023 at 1:03 pm
На сайте https://yotech.ru вы сможете ознакомиться с новостями, которые посвящены высоким технологиям, железу, а также инновациям. Здесь рассматриваются различные функциональные гаджеты, а также приложения, софт, программы, которые необходимы для ежедневной работы. Имеются популярные рубрики и материалы, которые помогут сориентироваться во всем многообразии информации. Опубликован материал про iPhone 12, а также актуальный рейтинг смартфонов. Все статьи созданы лучшими авторами, которые отлично разбираются в данной теме.
ovalozep · May 12, 2023 at 1:06 pm
На сайте https://buckshee.net/ вы сможете почитать всю интересную и любопытную информацию, новости со всего мира, которые касаются политики, экономики. Есть раздел «Фитнес качалка», а также мужской, женский форумы, туристический форум, на котором вы сможете найти единомышленников, пообщаться и обсудить важные темы. Также имеются и видеоматериалы хорошего качества. Ознакомьтесь с ними сейчас. Вверху страницы опубликован курс валют. А прямо перед вами лента тех новостей, которые произошли буквально сегодня, несколько дней назад.
vaEsfmenry · May 12, 2023 at 1:17 pm
На сайте https://studio-mint.com.kg/ закажите обратный звонок для того, чтобы воспользоваться разработкой дизайн-проекта при помощи компетентных, квалифицированных специалистов, которые отличаются огромным опытом, а потому они учтут ваши пожелания, предпочтения и различные нюансы. Все работы выполняются под ключ. В компании выполнят дизайн коттеджей, квартир, фасадов, коммерческих интерьеров. Для того чтобы лучше ознакомиться с услугами, изучите портфолио, где представлены работы за различный период. Также есть статьи в блоге. Почитайте их сейчас.
Zyn1WikiChampion#genname[AbCdEfGhIj,2,5] · May 12, 2023 at 4:24 pm
Get to know more about [url=https://zyn1.wiki/]zyn[/url] with Zyn1 Wiki, your reliable source for comprehensive information about nicotine pouches. Learn about our wide range of Zyn flavors and join our growing community.
PabloSnusLover#genname[UiOpAsDf,2,6] · May 12, 2023 at 8:30 pm
Unveil a colorful world of taste with [url=https://pablo-snus.gay/]pablo snus[/url]. Dive into the inclusive community of snus lovers today!
ofeevthype · May 12, 2023 at 8:46 pm
На сайте https://ab-korea.ru/ вы сможете оформить заявку на подбор автомобиля из Южной Кореи с гарантиями. Если транспортное средство не будет найдено в соответствии с вашими параметрами в течение пары месяцев, то предоплата будет возвращена в полном объеме. Все платежи осуществляются через специальную систему, что подтверждает прозрачность, безопасность сделки. При необходимости будет оказана услуга подбора автомобиля с участием высококлассного менеджера. Доставка автомобиля происходит с использованием качественной техники.
bovaHGuisp · May 12, 2023 at 9:00 pm
На сайте https://widgenta.com вы сможете воспользоваться лучшими и проверенными виджетами, которые идеально подходят для вашего сайта. Компания смогла разработать уникальный сервис с востребованными виджетами. В обязательном порядке применяются революционные и инновационные технологии, которые помогают получить необходимый результат. Укажите свою электронную почту для того, чтобы получить ранний бесплатный доступ, а также новости. Все максимально просто. Для каждого клиента действуют особые, уникальные предложения.
ixajloJaick · May 12, 2023 at 10:27 pm
На сайте https://premium-sk.ru/ вы сможете бесплатно вызвать мастера для того, чтобы он выполнил замеры с последующим ремонтом квартиры любой площади. Кроме того, в компании оказывают и такие услуги, как строительство коттеджей. В ней трудятся исключительно проверенные и надежные прорабы, инженеры и технологи. На работы, материалы распространяются гарантии. Для того чтобы ознакомиться с примерами, изучите портфолио. За 9 лет работы на рынке удалось наладить сотрудничество с лучшими поставщиками материалов и предложить клиентам профессиональный сервис.
lnaraRic · May 12, 2023 at 10:30 pm
На сайте https://naturalstones-jewerly.com.ua/ вы сможете приобрести изысканные, роскошные изделия из натуральных камней. Они созданы искусными ювелирами, которые производят не только стильную, но и качественную продукцию. Она будет пользоваться спросом во все времена. Вы сможете передавать изделия по наследству, ведь они сохранят свой вид надолго. Среди огромного ассортимента вариантов вы точно выберете то, что вам понравится. Украшение отлично впишется в ваш повседневный образ, станет броским элементом.
tovVikNOt · May 12, 2023 at 11:31 pm
На сайте https://bigpicture.ru/ вы сможете ознакомиться с интересными и любопытными новостями, которые оформлены в форме картинок. Публикации посвящены таким темам, как культура, история, путешествия. На портале имеются и лонгриды, почитать которые захочется и вам. Есть материалы на тему фотографии, а также те, что касаются прошлых времен. О многих фактах вы даже и не догадывались. Имеются данные о животных, истории в картинках, которые точно не оставят вас равнодушным. Узнаете новости времен СССР.
tagFofes · May 13, 2023 at 4:36 am
По ссылке https://prikazohrtrud.ru/ вы сможете позвонить либо оформить заявку на повышение квалификации либо аттестацию. Сейчас на оформление удостоверения по электробезопасности действует скидка. Оно обойдется вам в 15 000 рублей. Компания работает в данной сфере более 5 лет, а потому знает все нюансы, чтобы вы получили документ быстро, на профессиональном уровне и без сложностей. Услуга будет необходима для заводов, различных производств, строительных компаний, частных специалистов.
edotoBig · May 13, 2023 at 5:16 am
На сайте http://superblend.ru вы сможете приобрести пищевые натуральные ингредиенты как в розницу, так и оптом. В каталоге находятся экстракты фруктов, овощей, ягод в сухом виде. Кроме того, имеются сублимированные фрукты, ягоды, растения, ценные травы, сухие соки, различные специи, жмыхи, сухой мед и многое другое. Вся продукция является абсолютно безопасной, гипоаллергенной, а потому подходит для употребления даже детьми. В ней отсутствуют вредные добавки, консерванты, глютен. Приобретайте все, что необходимо с оперативной доставкой и в любом количестве.
PabloBioSnus#genname[QwErTyUi,2,7] · May 13, 2023 at 5:53 am
Experience [url=https://pablo-snus.bio/]pablo snus[/url] like never before with our bio range. Go organic, go Pablo Snus.
SiteSnusMaster#genname[ABCDxyz,2,6] · May 13, 2023 at 7:44 am
Join us on [url=https://snus2.site/]snus[/url] odyssey and discover a universe of unique flavors at Snus2.Site!
ncmoiWoump · May 13, 2023 at 7:46 am
На сайте https://usdebtclock.net вы сможете изучить всю важную и полезную информацию, которая касается государственного долга. Под таким термином понимают сумму, которую должно правительство иностранным компаниям, частным лицам. В разделе перечислены основные причины, по которым образовались долги. Сюда относят войны, программы, которые предоставляют льготы, а также снижение налоговой нагрузки. Дело в том, что из-за того, что правительство регулярно снижает процент, то и суммы в казну стали поступать меньшие.
nmndirstori · May 13, 2023 at 8:10 am
На сайте https://mebel-rusi.ru вы сможете оставить заявку на изготовление привлекательной, качественной и презентабельной мебели на любой вкус. Она будет создана в соответствии с предпочтениями, по индивидуальным эскизам и только для вас, точно в оговоренные сроки. Если есть вопросы, то задайте их менеджеру компании, который даст ответы на них. Что касается расценок, то они остаются на доступном уровне, что позволит обновить свой интерьер каждому. Инженеры и технологи произведут любую мебель в соответствии с модными тенденциями.
vaLyuSomma · May 13, 2023 at 10:03 am
Сайт https://xn—-7sbzrcrcmj1c.xn--p1ai/ представляет собой сервис по поиску соратников для совершения товарищеских турниров, а также игр. При этом нет необходимости каждому игроку проходить регистрацию. Нужно лишь это сделать только представителю команды. Для того чтобы подобрать соперника, необходимо просто зайти в подходящий раздел, после чего оставить заявку. После этого моментально оповещается организатор. Если ответ положительный, то сразу же организуется товарищеский матч.
anovfNom · May 13, 2023 at 12:31 pm
https://bag24.by/ – это интернет-магазин чемоданов и сумок для путешествий. Купить чемодан на колесика в каталоге Bag24 легко! В магазине представлен большой ассортимент багажа для путешествий. Удобная система сортировки и фильтров помогут вам выбрать чемодан по размеру, цвету и материалу, а также детские чемоданы. Если у вас есть вопросы или требуется помощь в выборе товара, вы можете позвонить нам, и мы посоветуем подходящий товар для вас.
asavismize · May 13, 2023 at 1:31 pm
На сайте http://kuzinfo.ru вы сможете почитать актуальные, новые и интересные новости Кузбасса, а также всей России. Они посвящены Дню Победы, встрече лидеров глав государств. Имеются данные о ковиде и о том, как его победить. Кроме того, есть мнения экспертов, президентов разных стран. Все новости самые свежие, актуальные и правдивые. Их находит администрация сайта, чтобы держать вас в курсе последних происшествий. Если в стране или Кузбассе что-то произошло, то это тотчас освещается на сайте.
lousofigma · May 13, 2023 at 5:49 pm
На сайте https://mob25.com/ вы сможете почитать интересный, любопытный и нужный материал, который касается информационных технологий. Здесь опубликованы самые обсуждаемые темы, которые будут интересны и вам. Имеются задачи, которые можно будет выполнить при помощи Python, различные информационные статьи, которые ответят на многочисленные вопросы, научат вас программированию. Есть любопытная компьютерная литература не только для новичков, но и профессионалов, желающих узнать что-то новое.
ovFroSen · May 13, 2023 at 8:02 pm
На сайте https://j-center.ru/ вы сможете оставить заявку на то, чтобы записаться на обучение в школу-студию Юлии Бурдинцевой. Все навыки отрабатываются строго на клиентах. Преподаватели – высококлассные специалисты, которые расскажут вам то, что знают сами. При этом они преподают немного теории, а в основном -практику, чтобы вы лучше освоили выбранную сферу. Все выпускники получают только пользу от обучения. А еще опыт общения с клиентами, что тоже важен. Плата за обучение небольшая и сполна компенсируется полученными навыками.
ttsHanCourl · May 13, 2023 at 8:18 pm
https://megapolis-plit.ru/ это – Тротуарная плитка под ключ. Укладка тротуарной плитки. Работаем без посредников. Свое производство. Более 15 лет на рынке услуг. Гарантии по договору.
terbinafine tablet · May 13, 2023 at 8:58 pm
flonase nasal spray nz flonase nasal spray 50 mcg united kingdom flonase nasal spray online
dryavcgraib · May 13, 2023 at 11:05 pm
На сайте https://moyasimka.ru вы сможете приобрести сим-карты, а также выбрать наиболее подходящий тариф. Предлагается товар дня, который реализуется на самых выгодных условиях и с хорошей скидкой. Ознакомьтесь с лучшими тарифами за этот год. Есть и безлимитные Сим карты для интернета, звонков, для звонков на собственный номер. Кроме того, имеются и модемы. При необходимости воспользуйтесь специальным фильтром по стоимости, новизне, популярности, наличию, в обратном порядке.
Beckhamempixelm · May 13, 2023 at 11:06 pm
find out here now
risaSaFuect · May 14, 2023 at 2:19 am
На сайте https://www.kartapobytupoznan.pl/ru вы сможете получить помощь в оформлении карты побыту. Закажите звонок прямо сейчас, чтобы воспользоваться профессиональной помощью квалифицированного менеджера, который ответит вам на все вопросы, даст ценные советы. Карта побыту считается первым шагом к получению польского гражданства. К тому же, она дает огромное количество привилегий. Кроме того, вы сможете пребывать в других странах без необходимости оформления Шенгенской визы. С такой картой вы сможете устроиться на работу официально.
nisimmeeli · May 14, 2023 at 3:36 am
На сайте https://tent3302.ru/ вы сможете приобрести запчасти, оригинальные детали на отечественные автомобили. Компания реализует шины и диски, двигатели, а также запчасти на Валдай, Камминз, УАЗ, КАМАЗ ЗиЛ. Всегда в наличии почти вся продукция, а потому вы сможете приобрести ее в наиболее комфортное время. Однако перед тем как совершить покупку, необходимо ознакомиться со всеми техническими характеристиками, а также позвонить по обозначенному телефону, чтобы уточнить по наличию. Но в компании вы сможете приобрести не только запчасти, но и шины, а еще двигатели, диски.
ohoronow · May 14, 2023 at 5:58 am
На сайте https://arenda-kolyasok.ru вы сможете оформить заявку на то, чтобы арендовать инвалидную коляску. В компании только качественные, надежные конструкции, которые обрабатываются, дезинфицируются после каждого пользователя. Именно поэтому клиент получает коляску в ухоженном, чистом виде. Взять в аренду изделие вы сможете в любое время и даже на несколько дней. Именно от интервала зависит итоговая стоимость. Выбирайте ту модель, которая подходит вам больше всего. Организуется оперативная доставка по Москве.
intrudaCuck · May 14, 2023 at 7:40 am
Сайт https://forum-gta.ru/ представляет собой форум, на котором могут между собой общаться любители и игроки в GTA. На форуме есть и список других форумов, где вы сможете почерпнуть много ценной и нужной информации, чтобы ознакомиться со всеми нюансами. Игроки активно делятся своими знаниями на этом сайте, а потому и вы сможете подобрать что-то нужное и новое. Здесь обсуждаются самые разные темы. Вы тоже сможете подключиться к этому и даже найти единомышленников. Для наглядности напротив каждой темы обозначено количество сообщений, посетителей, а также просмотров.
rtynovmoigh · May 14, 2023 at 11:20 am
На сайте https://iz-nerzhaveyki.ru/ вы сможете почитать информацию, которая касается гибкой подводки из нержавеющей стали, а также гибкой подводки, шаровых кранов, фитингов, фланцевых кранов, муфт, арматуры. Написана подробная статья, в которой рассказывается о преимуществах комплектующих. Все они надежные, качественные и практичные, а потому невосприимчивы к агрессивным воздействиям окружающей среды, химическим реагентам. Имеется и сфера, особенности применения и другая интересующая информация.
rolovfuels · May 14, 2023 at 11:25 am
На сайте https://kuh-ugolki.ru/katalog-mebeli/kuhonnyj-ugolok-so-spalnym-mestom/ вы сможете заказать кухонный уголок, оснащенный спальным местом. Представлен огромный ассортимент продукции на самый взыскательный вкус, широкая цветовая гамма: сиреневый, бежевый, серый, зеленый, лазурный, голубой. Но есть и комбинированные варианты, состоящие из самых разных оттенков. В любом случае вы подберете решение на свой вкус. Все кухни выполнены из качественных, современных материалов, а потому не сотрутся со временем, сохранят изначальный вид.
oroniNer · May 15, 2023 at 2:59 am
Сайт https://smmpanel.one/ представляет собой самый популярный, работающий SMM-провайдер с оперативной доставкой и минимальными расценками. Вас ожидает максимально быстрое продвижение в социальной сети. И самое главное, что все работы будут выполнены абсолютно безопасно, надежно. Ознакомьтесь с кейсами прямо сейчас, чтобы воспользоваться всеми привилегиями. На портале имеются и любопытные видеоматериалы, которые внесут ясность в работу компании. Этот провайдер отличается наиболее приемлемыми расценками, а также безупречным уровнем обслуживания.
onovaReogy · May 15, 2023 at 3:48 am
На сайте https://citytour24.ru/ вы сможете заказать интересные экскурсии на автобусе: тематические, регулярные, а также школьные. Путешествие по Москве-реке обойдется вам от 99 рублей, ежедневно устраиваются экскурсии, чтобы вы рассмотрели все красоты города. С вами будут работать квалифицированные и опытные гиды, которые поведают вам массу оригинальных и интересных историй. В разделе находится большой выбор экскурсий, среди которых вы обязательно найдете оптимальный вариант.
elyovbom · May 15, 2023 at 4:39 am
На сайте https://serialexpress.ru вы сможете приобрести сериалы как отечественного, так и зарубежного производства. Все они находятся в отличном качестве. А широкий выбор позволит обязательно определиться с тем, что посмотреть сегодня вечером либо после работы. Все фильмы отобраны тщательным образом, чтобы угодить каждому клиенту. Есть кино самого разного жанра: мелодрамы, драмы, комедии, триллеры, ужасы. Оно с хорошим звуком, четкой картинкой. Компания также оказывает услуги звукозаписи. Фильмы реализуются по доступной стоимости и с оперативной доставкой.
iiSharDow · May 15, 2023 at 6:14 am
На сайте https://grand-com.ru/ вы сможете заказать технику Rooma, а также чайные фильтры, все для приготовления выпечки, хранения продуктов в свежем виде. Есть категория товаров для уборки, включая пыльники, мешки для мусора и многое другое. Имеется качественная и надежная посуда, которая поможет вам в приготовлении вкусной, здоровой пищи. Все товары от лучших, именитых марок, которые положительно себя показали. Вы сможете зайти в свой кабинет и просматривать там свои заказы. Выбирайте всю продукцию, которая вам необходима и по доступным ценам.
selovgon · May 15, 2023 at 8:18 am
На сайте http://pronokti.ru/ вы сможете записаться на услугу по оформлению, уходу за ногтями. Специально для вас комфортный и индивидуальный формат оказания услуги без посторонних. Используются материалы премиального сегмента, а потому покрытие будет служить долгое время, радуя сочностью палитры, приятными декоративными элементами, которые завершат композицию и станут ее главным акцентом. Используется стерильный инвентарь, соблюдаются все санитарно-эпидемиологические требования. Вежливое и доброжелательное отношение к каждому клиенту.
kusheBaf · May 15, 2023 at 10:23 am
На сайте https://okirove.ru/ вы сможете почитать увлекательные, интересные и актуальные новости не только Кирова, но и области. Так имеются данные, которые касаются первых лиц города. Они делятся своим экспертным мнением, помогают лучше понять обстановку. Они дают комментарии, которые касаются наболевших вопросов, разъясняют обстановку и помогают лучше сориентироваться в ней. Все новости свежие, произошли только сегодня или несколько часов назад. Вот почему вы узнаете о них первыми.
SchedTrunk · May 15, 2023 at 1:31 pm
На сайте https://mangamammy.ru почитайте интересные манги на самую разную тему, включая про любовь, дружбу, приключения. Многие из них состоят не из одной главы и нескольких томов. Есть комедии, которые никого не оставят равнодушным. Для того чтобы получить больше привилегий, пройдите регистрацию. Также есть раздел, посвященный истории чтения. Так вы узнаете о том, какие книги вы уже прочитали. Все манги невероятно интересные и увлекательные, а потому не заставят заскучать. С первых строк они погружают в приятные эмоции, а потому ими можно зачитаться.
nalihadem · May 15, 2023 at 2:14 pm
На сайте https://www.goodly-studio.com/ вы сможете приобрести панно изо мха, спилов, растений, а также изысканные композиции из стабилизированных цветов. Есть часы изо мха с подсветкой, композиции в кашпо и многое другое. Все композиции выполнены из качественных, антиаллергенных и полностью безопасных материалов, а потому не представляют собой никакой опасности. Почитайте отзывы клиентов о работе. Все они положительные и как нельзя лучше олицетворяют работу дружного коллектива.
vakaslah · May 15, 2023 at 5:37 pm
На сайте https://palitra24.ru/ вы сможете приобрести все для того, чтобы оказать профессиональные услуги маникюра и педикюра. В разделе вы найдете топы, гель-лаки, фрезы, насадки, различное оборудование, инструмент, жидкости, кисти, все для дизайна. Ознакомьтесь с хитами, которые популярны среди профессионалов. Регулярно интернет-магазин проводит распродажи, действуют акции, а потому в это время вы сможете осуществить более выгодную покупку. Здесь всегда действуют выгодные цены, а доставка осуществляется в минимальные сроки.
vazrvCog · May 15, 2023 at 6:11 pm
На сайте https://xn—-otbfkgdah1a8b.com.ua/ представлена стильная, модная, качественная оптика, которая подходит для создания привлекательного имиджа, яркого стиля. Имеются варианты как для мужчин, так и женщин. Все очки брендовые, высокого качества, а потому прослужат долгое время, обрадуют внешним видом. Регулярно в интернет-магазине появляются новинки, с которыми необходимо ознакомиться и вам. Очки имеют оправу разной формы: квадратную, круглую. Есть и разноцветные детские модели, которые понравятся малышам самого разного возраста.
ulyaevSnisy · May 15, 2023 at 9:44 pm
На сайте https://platl.ru приобретите цифровые товары: игры, интернет-провайдеры, мобильную связь, платежные системы и многое другое. На портале можно заказать и программное обеспечение из самых разных сфер: бухгалтерия, делопроизводство, игры, мобильная связь, графика и мультимедиа. Есть раздел с рекомендованными товарами, которые советует администрация сайта. Имеется раздел с самыми популярными товарами, которые приобретают очень часто. Заходите сюда регулярно, чтобы приобрести все, что необходимо.
gusevZeX · May 15, 2023 at 9:57 pm
На сайте https://v-okne.by/ вы сможете заказать ремонт и регулировку окон в Минске, а также по области. Что касается проведения ремонтных работ, то это является основным направлением деятельности компании. Компетентные специалисты выполнят все работы на высоком уровне и независимо от их сложности. Узнайте расценки прямо сейчас. Компания отличается огромным опытом работы – она находится на рынке более 10 лет. Мастер выедет на объект непосредственно в день обращения и выполнит все работы в течение часа. Воспользуйтесь и вы услугой от профессионалов.
SnusShopkeeper#genname[XYZabc,2,7] · May 15, 2023 at 11:53 pm
Discover the finest [url=https://snus2.shop/]snus[/url] selection in our shop! Explore Snus2.Shop today!
SnusJester#genname[FuNjOkEs,2,6] · May 16, 2023 at 12:19 am
Unleash the fun of [url=https://snus1.fun/]snus[/url] at Snus1.Fun!
hoseiEmoky · May 16, 2023 at 2:02 am
На сайте https://fx-roboforex.com/ изучите всю нужную и актуальную информацию, которая касается заработка на Форекс вместе с RoboForex. Для того чтобы успешно продавать, необходимо подобрать честного брокера. Важной целью такого сайта является поделиться с пользователями всей ценной информацией, которая касается трейдинга. Этот портал полностью посвящен именно этому брокеру, который заполучил уважение многих, кто принимает участие в торгах. На сайте регулярно появляются свежие записи, которые будут интересны и вам.
inaShevors · May 16, 2023 at 9:49 am
На сайте https://gruzoperevozki-gazel-samara.ru/ воспользуйтесь услугами грузоперевозок на Газели. Все работы оказываются в Самаре и по области без праздников и выходных, в любое, наиболее удобное время. Вы сможете воспользоваться услугами грузчиков по привлекательной стоимости. Можно заказать газель на переезд, грузоперевозки по городу, межгород, а также вывоз мусора. В компании работают компетентные, опытные и квалифицированные специалисты, которые предпримут все возможное, чтобы вы остались довольны качеством оказываемых услуг.
ilasamwew · May 16, 2023 at 1:52 pm
На сайте https://posbazar.ru/ приобретите систему Iiko, которая необходима как средним, так и крупным предприятиям, которые развивают свою сферу деятельности. Так вы сможете начать контролировать списания на складе, а также продажи, принимать все платежи. Только в апреле специально для вас действует хорошая скидка. Система поможет вам значительно увеличить прибыль и исключить возможность кражи персонала. Необходимо ответить на несколько вопросов для того, чтобы узнать, во сколько обойдется вам ваша покупка.
elavil united kingdom · May 16, 2023 at 2:47 pm
zyloprim 300 mg cost zyloprim pharmacy zyloprim 300mg without a doctor prescription
rovaAExpig · May 16, 2023 at 5:38 pm
На сайте https://kupit-muhomory.ru/ вы сможете приобрести лечебные сушеные мухоморы напрямую от изготовителя. Это урожай прошлого года. Доставка организуется по всей России, а также странам СНГ. Сейчас компания распродает остатки по самым лояльным ценам, а потому и вы тоже сможете совершить выгодную покупку, которая точно вам понравится. В разделе представлены шляпки красного мухомора, настойка мухомора на самогоне, мухомор в капсулах, ежовик гребенчатый и многое другое. Вся продукция свежая и обязательно вам поможет в решении определенной задачи.
Bowenempixelm · May 16, 2023 at 7:48 pm
more helpful hints
novamDer · May 16, 2023 at 8:28 pm
На сайте https://beperfect-shop.ru вы сможете приобрести профессиональные материалы, предназначенные для наращивания, а также ламинирования ресниц. В разделе представлена следующая атрибутика: клей для наращивания ресниц, инструменты, расходный материал для ламинирования, уходовая линия и многое другое. Вся продукция абсолютно безопасная, качественная и сертифицированная, выполнена именитыми марками. Они знают потребности профессиональных мастеров. Вся продукция по доступным расценкам.
SnusMerchant#genname[StOrEsAlEs,2,5] · May 16, 2023 at 11:48 pm
Discover the best of [url=https://snus2.store/]snus[/url] at Snus2.Store! We’ve got your snus needs covered.
aparaKek · May 17, 2023 at 1:22 am
На сайте http://mebel.morekrim.com/kuhni вы сможете заказать качественную, добротную мебель. Для того чтобы воспользоваться услугой, необходимо позвонить по указанному телефону. Далее к вам на объект прибудет замерщик, который рассчитает стоимость проекта. В любом случае она будет выгодней, чем у конкурентов. На итоговую стоимость влияют следующие факторы: размеры мебели, цена фасадов, качество фурнитуры, а также то, из какого материала будет создана столешница. Ознакомьтесь с примерами работ на сайте.
SnusXplorer#genname[XyZpUn,2,5] · May 17, 2023 at 7:51 am
Discover the fascinating world of [url=https://snus2.xyz/]snus[/url] at Snus2.XYZ! Experience snus in a whole new dimension.
vinogtwina · May 17, 2023 at 9:03 am
На сайте https://online-tkm.com/ вы сможете получить консультацию по поводу лечения в Китае. Филиалы поликлиники находятся в Пекине, Даляне, на острове Хайнань. Для каждого пациента составляется собственный план лечения при помощи врачей высокой квалификации и категории. Клиника лицензированная, дает гарантии на лечение. Все врачи отличаются высокой квалификацией, а потому с легкостью справятся даже с самой сложной задачей. Клиника работает круглосуточно и каждый день, чтобы вы смогли в любое время воспользоваться услугой.
SkrufAficionado[jeJKdlsxwdF] · May 17, 2023 at 12:06 pm
Uncover the rich [url=https://skruf.xyz/]skruf[/url] heritage and savor the outstanding assortment of flavors!
InkyElf[jeJKdxswidF] · May 17, 2023 at 12:32 pm
Immerse yourself in the top-notch [url=https://elf-bar.ink/]elf bar[/url] range with our premium ink selection!
ksandboogS · May 17, 2023 at 1:23 pm
На сайте https://fankino.ru/ вы сможете ознакомиться с новостями, посвященными кино, сериалам, различным развлечениям. Только здесь самый актуальный, свежий и интересный контент, который позволит отследить выхода новых серий любимого сериала. Имеются трейлеры, которые помогут определиться с тем, стоит ли смотреть продолжение фильма. Есть обзоры различных фильмов, их содержание, то, чем закончатся, количество серий, актерский состав и многое другое. Еще имеется контент, касающийся примет, праздников, образования.
ntinabmok · May 17, 2023 at 1:49 pm
На сайте https://fairspin-qn.ru почитайте информацию о популярном онлайн – заведении Fairspin. Оно открылось не так давно, но уже заполучило постоянных клиентов, которые облюбовали его и регулярно на него заходят. Онлайн-казино отличается наличием лицензии. Дизайн выполнен в приятной цветовой гамме, который не отвлекает от игры. Регистрация на этом портале займет всего пару минут и не вызовет сложностей. В настоящий момент насчитывается около 2 сотен симуляторов от лучших производителей.
linaoUnafe · May 17, 2023 at 2:20 pm
На сайте https://shopfishing.com.ua вы сможете приобрести все, что нужно для ловли рыбы. Здесь богатый ассортимент продукции, которая понравится не только дилетантам, но и заядлым рыбакам, желающим обновить свой арсенал. Вас обрадует оперативная доставка, а также безупречный клиентский сервис, зачисление бонусов за покупки. Весь товар является оригинальным и качественным. На него установлены привлекательные цены. Оплата любым, наиболее удобным способом. Регулярное расширение ассортимента.
LifeOfElf[jeJKlswodG] · May 17, 2023 at 6:56 pm
Delight in the exceptional [url=https://elf-bar.life/]elf bar[/url] lifestyle with our outstanding collection!
ElfBarFanatic[kdJEswodL] · May 17, 2023 at 8:07 pm
Explore a world-class vaping journey with [url=https://elf-bar.website/]elf bar[/url]!
onovssep · May 17, 2023 at 11:59 pm
На сайте https://arbolitotpetrovicha.ru/ вы сможете приобрести арболитовые блоки от производителя. Компания использует исключительно проверенные, качественные и экологически безопасные материалы. Арболит является надежным, качественным, прочным материалом, который прослужит долгое время и обрадует своими безупречными эксплуатационными свойствами. В нем идеальным образом сочетаются все важные характеристики камня, а также дерева. Вся продукция реализуется по привлекательным ценам, с быстрой доставкой.
urovaVah · May 18, 2023 at 12:22 am
На сайте https://pond-trade.ru/ вы сможете приобрести пленку для водоемов, пластиковые пруды, насосы для водоемов, фильтры для пруда, а также все необходимое для ухода за прудом, водоемом. Обязательно посетите раздел со специальными предложениями, где находится продукция по особым, привлекательным ценам. А еще имеются интересные новинки, которые обязательно понадобятся вам в решении ежедневных задач. Кроме того, есть и информативные, содержательные материалы, из которых вы почерпнете много полезного и нужного.
DarinSix · May 18, 2023 at 6:48 am
сальметерол ингалятор цена
DarinSix · May 18, 2023 at 7:41 am
ингалятор компрессор купить
ElfBarScholar[kpWEwdLnI] · May 18, 2023 at 7:52 am
Dive into the extensive lore of [url=https://elf-bar.wiki/]elf bar[/url] and their contribution to vaping culture!
VapingEnthusiast[ZtCJelDxR] · May 18, 2023 at 8:11 am
Experience the playful side of [url=https://elf-bar1.fun/]elf bar[/url] and the joy of vaping!
Dallasrip · May 18, 2023 at 10:13 am
ингалятор цена в аптеках красноярск
Dallasrip · May 18, 2023 at 11:05 am
ингалятор купить в брянске
ngeorEvize · May 18, 2023 at 11:22 am
На сайте https://ostrov-nevest.ru/services вы получаете возможность арендовать комфортный и презентабельный транспорт на свадьбу для создания кортежа. Вы можете взять в аренду любой автомобиль, независимо от класса, компании-изготовителя. Здесь также есть и раритетные автомобили, которые будут эффектно и красиво смотреться на фотографиях. Напротив каждого транспортного средства имеется информация о нем, а также расценки. Это позволит сделать правильный выбор и посчитать стоимость.
TimothyWeito · May 18, 2023 at 2:24 pm
https://coinmarketcap.com/community/articles/643e7e01d2163e52a43192da/
A cryptocurrency payment gateway is a service that manages and facilitates the processing of cryptocurrency payments for merchants.
The payment system allows you to accept crypto, which can then be converted into the fiat currency of your choice (dollars, euros, etc.) or another type of crypto.
JulesZed · May 18, 2023 at 5:35 pm
лазерная резка металла стоимость
JulesZed · May 18, 2023 at 5:40 pm
лазерная резка металла в спб стоимость услуг
E-cigShopper[ukTKgrMvNY] · May 18, 2023 at 8:38 pm
Make your vaping experience better with [url=https://elf-bar1.shop/]elf bar[/url]! Find the best deals on our website!
ProfessionalVaper[ilSKcpTzWX] · May 18, 2023 at 8:41 pm
Experience [url=https://elf-bar1.pro/]elf bar[/url] from a professional’s perspective! Unmatched e-cig experience for discerning vapers!
TimothyCug · May 18, 2023 at 9:51 pm
https://missfashionrussia.ru/
MysticVaper[mnBCdFGzwq] · May 19, 2023 at 12:25 am
Experience [url=https://elf-bar1.website/]elf bar[/url]’s incredible range of vaping options like never before!
ElfBarAficionado[weJDfmNvTZ] · May 19, 2023 at 12:29 am
Step up your vaping game with [url=https://elf-bar1.site/]elf bar[/url]! Join us to discover more!
DanielMob · May 19, 2023 at 4:40 am
кухни на заказ
VaporWhiz[ktLNdMTEyr] · May 19, 2023 at 6:50 am
Join us at [url=https://elf-bar1.wiki/]elf bar[/url] wiki for the best vaping insights and community discussions!
VaporGeek[fRqGjLkZov] · May 19, 2023 at 6:51 am
Step into a world of elite vaping experience at [url=https://elf-bar1.life/]elf bar[/url] – enhancing your life one puff at a time!
ldabejox · May 19, 2023 at 9:30 am
На сайте https://maxbetslots-qm.ru вы узнаете всю необходимую и исчерпывающую информацию о Maxbetslots. Казино предоставляет уникальную возможность сыграть в интересные и оригинальные автоматы, которые позволят не только получить выигрыш, но и приятные, положительные эмоции. При этом вас ожидает только честная игра, моментальные выплаты, прозрачные условия работы. Портал не перестает развиваться, заботиться о своих клиентах, а потому прорабатывает интерфейс. Вы сможете воспользоваться щедрой бонусной программой, бесплатными фриспинами, кешбэком.
RobertSiz · May 19, 2023 at 9:40 am
http://drive-land.net/kazahskie-pesni-2023.html
RobertSiz · May 19, 2023 at 9:44 am
http://pro-glazki.ru/
PouchesConnoisseur[PqTyUbnwEkd] · May 19, 2023 at 10:32 am
Dive into the incredible world of [url=https://siberia.bio/]siberia[/url] nicotine pouches – redefine your flavor experience today!
PolarDipInfluencer[vRkHyPvQjD] · May 19, 2023 at 11:03 am
Dive into the riveting fusion of [url=https://siberia.ink/]siberia[/url] nicotine pouches – where taste meets artistry!
Michaelcrade · May 19, 2023 at 1:18 pm
https://www.google.com.uy/url?sa=t&url=https%3A%2F%2Finvestonomic.ru/
Michaelcrade · May 19, 2023 at 1:23 pm
https://www.google.co.ck/url?sa=t&url=http%3A%2F%2Finvestonomic.ru/
vaFeoboche · May 19, 2023 at 1:38 pm
На сайте https://oneserials.ru/ вы сможете посмотреть все полюбившиеся либо новые сериалы в режиме онлайн и все серии подряд. Имеются как отечественные, так и импортные сериалы, которые вам обязательно понравятся своим антуражем. Здесь огромный выбор фильмов с харизматичными, интересными и талантливыми актерами. Все фильмы в отличном качестве, с хорошей озвучкой. Регулярно на сайт добавляются новинки, которые будут интересны и вам. Воспользуйтесь поиском, чтобы найти подходящий вариант.
evrekKep · May 19, 2023 at 2:03 pm
На сайте https://crazydrift.ru/holiday вы сможете заказать яркий, незабываемый и веселый праздник для своего ребенка. Есть возможность выбрать любой пакет услуг в зависимости от предпочтений, финансового положения, количества гостей. Специально для вас будут работать аниматоры, а шоу-программа не оставит равнодушным ни одного ребенка. Только для вас необычная, интересная, креативная программа, которая раскроет все возможности и творческий потенциал. Создайте такой праздник, который еще долго будут вспоминать.
hgitkwar · May 19, 2023 at 2:21 pm
Сайт http://pochemu-kak.ru представляет собой справочник для школьников, студентов по самым разным предметам: математике, русскому языку, физике, химии, биологии, астрономии. Так вы узнаете о том, как правильно ставить ударение в словах, какой вес у облака и как пишется определенное слово. На этом портале только качественная, достоверная информация, которая поможет вам сориентироваться во всех вопросах. Именно поэтому вы сможете заходить сюда регулярно для того, чтобы получить ответы по всем интересующим темам.
NicotinePouchRevolution[qFyZpKdLxG] · May 19, 2023 at 3:18 pm
Immerse yourself in the unrivaled [url=https://siberia.wiki/]siberia[/url] nicotine pouch experience. Discover the range of unique flavors!
Samueltah · May 19, 2023 at 4:23 pm
Izzi casino
Samueltah · May 19, 2023 at 4:28 pm
casino Izzi
okhlovCal · May 19, 2023 at 5:00 pm
На сайте https://remont.antishop.kz/ оставьте заявку на обслуживание и ремонт оргтехники в Астане. Для каждого клиента доступен срочный ремонт в течение нескольких часов и в офисе. Применяются только качественные сертифицированные и оригинальные запчасти, которые продлевают эксплуатационные сроки. Компетентный менеджер компании приедет в офис либо домой, при необходимости отвезет технику для последующего ремонта. Вас обрадуют умеренные расценки, а также быстрое выполнение работ.
Douglasdex · May 19, 2023 at 7:59 pm
https://webtime.com.ua/
helmaMaP · May 19, 2023 at 8:43 pm
На сайте https://brkorob.ru/ вы сможете заказать оперативную доставку упаковочного материала непосредственно со склада. Покупайте все, что нужно и только безупречного качества. Очень часто на продукцию действуют скидки. Имеются и хиты продаж – это те товары, которые пользуются особой популярностью у покупателей. В разделе вы найдете коробки различного размера, стрейч-пленки, бумажные стаканы, рабочие перчатки. Вас ожидает оперативная обработка заказов, а также моментальная отправка.
ArcticTobaccoPioneer[vZjWbZxLvZ] · May 19, 2023 at 8:49 pm
Immerse yourself in the thrilling [url=https://siberia1.fun/]siberia[/url] nicotine pouch adventure. Experience our diverse range of exhilarating flavors!
usovyNat · May 19, 2023 at 9:51 pm
На сайте https://domshtor.spb.ru/ вы сможете вызвать дизайнера для того, чтобы он создал эскиз ваших новых штор. После того, как он будет утвержден, специалисты приступают к реализации идеи. В обязательном порядке заключается договор, выполняется монтаж карнизов, а также пошив штор. Каждый клиент получает заказ точно в назначенное время. В салоне работают компетентные и талантливые специалисты, которые выполнят работу любой сложности. Дизайнеры помогут с выбором ткани, с решением других задач.
PolarNicotineAdvocate[lkLKvKghhdA] · May 19, 2023 at 9:57 pm
Embrace the vibrant world of [url=https://siberia1.gay/]siberia[/url] nicotine pouches. Explore our varied selection of robust flavors!
zyprexa medication · May 19, 2023 at 10:58 pm
how to purchase tricor 160 mg tricor pills cost of tricor
Percyfab · May 19, 2023 at 11:13 pm
https://sladent.com.ua/
paFedAnifs · May 19, 2023 at 11:51 pm
На сайте https://ims.sx вы сможете ознакомиться с актуальными, честными новостями, которые касаются не только политики, но и экономики, финансов и других сфер жизни. Здесь также есть умные и интересные цитаты, фразы популярных личностей. Опубликованы материалы на тему науки, здоровья, космонавтики. Здесь много чего интересного и актуального на сегодняшний день. А еще имеются приколы, любопытные видеоматериалы, которые улучшают настроение и заставят от души посмеяться. Почитайте анекдоты, которые помогут расслабиться после трудового дня.
nyazedrada · May 19, 2023 at 11:55 pm
На сайте https://coffeedoctor.net/ вы сможете оформить заявку на оперативный и профессиональный ремонт кофемашины. Мастера проведут качественную и своевременную диагностику при помощи инновационного оборудования, а потому причина поломки будет определена с точностью. Есть возможность вызвать мастера на дом либо в офис. При этом диагностика выполняется абсолютно бесплатно. Специалист прибудет на объект в течение часа. На время ремонта вам будет предоставлена сменная машина. В компании действуют оптимальные цены.
orevadek · May 20, 2023 at 12:03 am
На сайте https://fairspin-qb.ru вы сможете почитать информацию, которая касается популярного заведения – казино Fairspin, которое предоставляет отличную возможность выиграть огромное количество денег. Важным моментом является то, что заведение является лицензированным, а все финансовые операции защищены специальной системой. Бонусом является то, что за финансовые операции не взимается комиссия. Выбор казино регулярно расширяется, чтобы предложить покупателю только самое лучшее.
AntonNig · May 20, 2023 at 12:46 am
https://webzarobitok.com/
elovacelay · May 20, 2023 at 5:36 am
На сайте https://ceresit-market.ru/ представлена продукция, которая потребуется для выполнения монтажа мокрого фасада, утепления фасадов, устройства полов, отделки стен. Кроме того, имеются герметики, пены, монтажный клей, ремонтные, кладочные смеси. В магазине установлены приятные цены, которые понравятся всем, кто планирует ремонт. А самое важное, что здесь вы сможете приобрести все, что нужно и в одном месте. Есть раздел с рекомендованными товарами, а также хитами и самыми популярными. Для желающих сэкономить есть раздел с товарами со скидкой.
Marcusgar · May 20, 2023 at 6:34 am
https://pro-groshi.info/
LiveNicPouchEnthusiast[qoQOrtyuopO] · May 20, 2023 at 6:58 am
Unleash a world of sensory delight with [url=https://siberia1.live/]siberia[/url] nicotine pouches. Experience the freshness of our exhilarating flavors!
SiberiaShopFan[siQPxbmpdT] · May 20, 2023 at 7:15 am
Experience the exhilarating [url=https://siberia1.shop/]siberia[/url] taste with our unique collection of flavors. Shop now!
eevafProow · May 20, 2023 at 7:50 am
На сайте https://www.ctgroup.kz/kursy-anglijskogo/ вы сможете записаться на изучение английского языка. В школе преподают компетентные и лучшие специалисты, которые разъяснят урок так, чтобы вы его отлично поняли, не возникло сложностей с произношением. Записаться в школу могут как взрослые, так и дети. Знание языка поможет вам заполучить хорошую должность или поступить в ВУЗ. Уроки проходят в наиболее комфортном формате и тогда, когда вам нужно. Всего за пару месяцев вы сможете овладеть языком и начать свободно говорить.
VirgilCaush · May 20, 2023 at 9:08 am
https://euromoneys.com/
novyarhymn · May 20, 2023 at 9:45 am
По ссылке https://yotech.ru находятся новости на тему высоких технологий, уникальных разработок, которые будут интересны всем, кто хоть как-то связан с данной тематикой. Вы узнаете про фальшивые QR-коды, самые работоспособные и функциональные планшеты, ноутбуки. Вы будете знать, на какие ноутбуки стоит обратить внимание. Имеется список самых популярных новостей, публикаций, которые читают тысячи пользователей. Все новости от экспертов, которые отлично понимают в данной теме. Постоянно появляются новые статьи, которые необходимо изучить и вам.
arselaunund · May 20, 2023 at 9:55 am
На сайте https://lucky-jet-best.com и прямо сейчас вы сможете начать играть в Lucky Jet. Игра считается лидером в сфере Краш игр. Она отличается уникальным и привлекательным дизайном, ярким и непредсказуемым сюжетом. В нее играют не только дети, но и взрослые, которые желают получить больше приятных эмоций от процесса. Начните прямо сейчас для того, чтобы сорвать побольше денег и приобрести то, о чем вы так давно мечтали. Игра популярна благодаря своему лаконичному и простому интерфейсу, а также огромному количеству регулярных выплат.
rayanSkakS · June 5, 2023 at 3:52 pm
Сайт https://perfectway.one/ представляет собой революционный сервис, который разработан специально игроками World of Warcraft. Этот сервис высокого качества, а потому вы точно можете на него положиться, ведь он действительно работает. А самое важное, что ваша учетная запись будет находиться в сохранности и безопасности, а потому третьи лица не получат к ней доступ. Здесь вы найдете все необходимые услуги, которые помогут улучшить игровые навыки и дойти до финала. Но если вас что-то не устроит, то деньги будут возвращены на ваш счет, в том числе, и потраченная комиссия.
emiliyslift · June 5, 2023 at 5:54 pm
На сайте https://tenchat.ru/1180791 вы сможете ознакомиться с полезной и нужной информацией, которая посвящена Михаилу Забегалову, который является руководителем проектов в аутсорс ИТ-компании. На страницах находится вся полезная информация, которая касается его сферы деятельности: задуманные и исполненные проекты, про продуктовую разработку приложений. Он не перестает расширять деловые связи. Регулярно публикует важные статьи, которые касаются его достижений. Также есть интересные материалы о рисках, выгоде инвестирования.
diroctah · June 5, 2023 at 6:56 pm
Сайт https://reshim24.com/ был создан специально в помощь студентам, которым требуется написать работу. Здесь вы сможете воспользоваться экспертной, профессиональной помощью. Специально для вас доступна консультация от экспертов и по всем вопросам. Здесь вы сможете воспользоваться такими услугами, как: написание курсовой, дипломной работы, контрольной. Лучшие специалисты выполнят чертежи, отчет по практике, решат задачу. Для того чтобы начать сотрудничество, необходимо просто описать задачу, чтобы получилось быстрее подобрать эксперта.
lmaraWah · June 5, 2023 at 7:28 pm
На сайте https://hvostatic.ru/ изучите актуальную и исчерпывающую информацию о наших четвероногих друзьях. Здесь рассматриваются самые разные породы собак, которые сгруппированы по видам. Есть милые, бойцовские, поводыри и другие, которые станут вашим помощником и союзником. Все статьи написаны специалистом, который рассматривает все достоинства, особенности собак и то, кому они больше подойдут. Есть видео материал о том, как быть, если питомец заболел. Ознакомьтесь с последними публикациями. А если интересует определенная порода, то воспользуйтесь специальным поиском.
MichaelMoN · June 5, 2023 at 9:42 pm
https://swimsever.ru/
Horacioimpen · June 5, 2023 at 9:49 pm
https://kot.bestbb.ru/viewtopic.php?id=334
Horacioimpen · June 5, 2023 at 9:55 pm
http://returnrp.listbb.ru/viewtopic.php?f=70&t=282
Horacioimpen · June 5, 2023 at 10:08 pm
http://izumrudnoeozero.listbb.ru/viewtopic.php?f=8&t=194
Horacioimpen · June 5, 2023 at 10:13 pm
http://telesat.gtaserv.ru/viewtopic.php?f=251&t=3233
Jamesasymn · June 5, 2023 at 10:45 pm
https://sport-reforma.ru/
Jamesasymn · June 6, 2023 at 12:07 am
фитнес клуб метро войковская
yegorTus · June 6, 2023 at 12:08 am
Сайт https://ekshen.ru/ создан специально для профессиональных и начинающих фотографов, которые желают получить больше инструмента для выполнения своих шедевров. Если и вы хотите вывести навыки на другой уровень и получить больше опыта, то воспользуйтесь этим уникальным порталом, который предоставит всю необходимую и полезную информацию – она обязательно вам пригодится, если вы и дальше желаете развиваться в своей сфере. У каждого появляется доступ более чем к 1000 пресетам.
Horacioimpen · June 6, 2023 at 12:25 am
http://layout.bestbb.ru/viewtopic.php?id=72
Horacioimpen · June 6, 2023 at 12:37 am
http://promintern.listbb.ru/viewtopic.php?f=16&t=55
Horacioimpen · June 6, 2023 at 1:29 am
http://kutejnikovo-61.ru/forum/messages/forum1/topic36/message34/?result=new
Horacioimpen · June 6, 2023 at 1:33 am
http://forummsk.getbb.ru/viewtopic.php?f=12&t=234
Horacioimpen · June 6, 2023 at 1:42 am
http://anatoliyrud.ekafe.ru/viewtopic.php?f=29&t=1409
Horacioimpen · June 6, 2023 at 1:46 am
http://testforum.1stbb.ru/viewtopic.php?f=3&t=37
commamiz · June 6, 2023 at 3:14 am
На сайте https://ntejapan.ru/ вы сможете оформить заявку на такую услугу, как подбор авто на аукционе. Отправьте заявку прямо сейчас, чтобы с вами связался менеджер. Сотрудники подберут специально для вас идеальный автомобиль. Также можно заказать транспортное средство на распил. При необходимости привезут автомобиль на запчасти. Во время распила ориентируются на ваши требования. Можно воспользоваться конструктором – это автомобили, которые разбирают, а не пилят. Чтобы лучше разобраться в вопросе, воспользуйтесь профессиональной консультацией.
Horacioimpen · June 6, 2023 at 3:19 am
http://registraciavsaita.listbb.ru/viewtopic.php?f=2&t=137
Horacioimpen · June 6, 2023 at 3:29 am
http://gta-life.ru/viewtopic.php?f=81&t=8124
ndaymlef · June 6, 2023 at 3:46 am
На сайте https://3848.ru вы сможете ознакомиться со всей интересующей вас информацией о том, как построить дом самостоятельно с применением подручных средств и инвентаря. Если желаете сделать дом более комфортным, удобным, то этот сайт точно для вас, ведь он предоставит вам только самую нужную и качественную информацию о том, что вам так важно. Имеется контент о подборе материалов и строительстве. Все материалы ценные и важные, а потому обязательно пригодятся вам. Регулярно добавляются полезные рекомендации от специалистов.
Horacioimpen · June 6, 2023 at 4:18 am
http://revolucionariadecuba.bestbb.ru/viewtopic.php?id=198
Horacioimpen · June 6, 2023 at 4:22 am
http://mongolsmc.listbb.ru/viewtopic.php?f=1&t=35
Horacioimpen · June 6, 2023 at 4:31 am
http://mosday.getbb.ru/viewtopic.php?f=12&t=193
Horacioimpen · June 6, 2023 at 4:34 am
http://writetranslate.ukrbb.net/viewtopic.php?f=7&t=28016
Plinko_tuh · June 6, 2023 at 5:11 am
https://plinkoxy.casino/
Sms_jef · June 6, 2023 at 5:31 am
Receive SMS https://smsreceiver24.io/
diroccinvix · June 6, 2023 at 5:46 am
На сайте https://m-maker.ru/ вы сможете приобрести стильную, изысканную мягкую мебель в спальню, гостиную, кабинет. Кроме того, можно заказать и свет, а также декоративные стильные решения, кресла, комплекты для дачи, пляжные зонты. На многие товары предоставляются скидки, что позволит сделать приобретение с большей экономией. Регулярно появляются новинки, которые украсят ваше помещение. Для того чтобы что-то выбрать, необходимо определиться с категорией. Вы сможете приобрести мебель в один клик прямо сейчас.
купить пуговицы · June 6, 2023 at 6:35 am
Hiya! I know this is kinda off topic however , I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog article or vice-versa? My site goes over a lot of the same subjects as yours and I believe we could greatly benefit from each other. If you might be interested feel free to send me an e-mail. I look forward to hearing from you! Wonderful blog by the way!
Jerrygeate · June 6, 2023 at 6:39 am
https://community.windy.com/user/pimpleoval28
ordlaGor · June 6, 2023 at 6:52 am
На сайте http://rxtx.su вы сможете получить всю необходимую информацию относительно электроники, а также измерений. Имеются сведения о микроконтроллерах, модулях и датчиках. Вся информация достоверная, качественная и проверенная, а потому вы можете на нее положиться. Вы получите ответы на многочисленные вопросы. А для того, чтобы отыскать то, что нужно, необходимо воспользоваться специальным поиском. Ознакомьтесь с разделами сайта, в которых содержится много нужной информации.
Mikadup · June 6, 2023 at 6:55 am
Tutustu ainutlaatuiseen [url=https://nikotiinipussi1.club/]nikotiinipussi[/url] valikoimaamme ja nauti taydellisesta nautinnosta!
Mikadup · June 6, 2023 at 6:57 am
Tutustu ainutlaatuiseen [url=https://nikotiinipussi1.bio/]nikotiinipussi[/url] valikoimaamme ja nauti taydellisesta nautinnosta!
Juusodup · June 6, 2023 at 7:02 am
Nauti ainutlaatuisesta [url=https://nikotiinipussi1.gay/]nikotiinipussi[/url] kokemuksesta valikoimamme kanssa!
Samdup · June 6, 2023 at 7:05 am
Explore a variety of [url=https://nicotine-pouches.click]nicotine pouches[/url] for a discreet and satisfying nicotine experience.
Mikkodup · June 6, 2023 at 7:17 am
Koe erinomainen [url=https://nikotiinipussi1.info/]nikotiinipussi[/url] valikoimamme avulla!
otzarzisic · June 6, 2023 at 8:28 am
На сайте https://natural-cosmetology.ru/ вы сможете почитать интересные, полезные и нужные статьи, которые касаются самых разных сфер: здоровья, психологии, питания, похудения и многого другого. Все рекомендации, материалы будут для вас полезны, особенно если вы хотите узнать больше советов из этой темы. Так вы узнаете о том, как понять мужчину и найти свой идеал, начать правильно питаться, какие контрацептивы выбрать, чтобы получить гарантированную безопасность. Регулярно на сайт добавляются новые интересные статьи, которые помогут разобраться в самых разных вопросах.
Jerrygeate · June 6, 2023 at 9:53 am
https://telegra.ph/6-recomendaciones-para-favorecer-tu-pyme-durante-tiempos-de-crisis-09-18
Jerrygeate · June 6, 2023 at 12:57 pm
http://www.heromachine.com/forums/users/dadlace09/
Adrianphaby · June 6, 2023 at 1:03 pm
http://forcemajor.maxbb.ru/topic418.html
Horacioimpen · June 6, 2023 at 1:08 pm
http://doublrp.listbb.ru/viewtopic.php?f=3&t=31
Adrianphaby · June 6, 2023 at 1:20 pm
http://npo.bestbb.ru/viewtopic.php?id=106
Adrianphaby · June 6, 2023 at 1:25 pm
http://flystarlady.listbb.ru/viewtopic.php?f=27&t=3520
sweetTeeds · June 6, 2023 at 1:35 pm
По ссылке https://10987.ru вы узнаете много информации о том, как правильно продвигать свой бизнес, с чего начать и какие меры предпринимать для того, чтобы ваши услуги или товары стали популярными и начали пользоваться спросом. Вы сможете определить цель и начнете к ней продвигаться. На портале представлены только эффективные и действенные советы, которые обязательно будут вам полезны. Все рекомендации представлены экспертами, профессионалами, отлично разбирающимися в этой теме.
Adrianphaby · June 6, 2023 at 2:23 pm
http://forum54.4adm.ru/viewtopic.php?f=69&t=6405
Adrianphaby · June 6, 2023 at 3:00 pm
http://fizteh.getbb.ru/viewtopic.php?f=43&t=282
Adrianphaby · June 6, 2023 at 3:10 pm
http://funnywipes.maxbb.ru/topic245.html
Adrianphaby · June 6, 2023 at 3:21 pm
http://lspdcg.listbb.ru/viewtopic.php?f=2&t=30
Horacioimpen · June 6, 2023 at 3:32 pm
http://lsfiredept.listbb.ru/viewtopic.php?f=2&t=56
Jerrygeate · June 6, 2023 at 3:38 pm
https://www.metooo.io/u/63265be6ba88547441a795c8
Adrianphaby · June 6, 2023 at 3:51 pm
http://rpinnovative.1stbb.ru/viewtopic.php?f=8&t=32
Adrianphaby · June 6, 2023 at 4:18 pm
http://forum.dsbb.ru/viewtopic.php?p=851
Horacioimpen · June 6, 2023 at 4:36 pm
http://vkusvillreply.listbb.ru/viewtopic.php?f=16&t=19908
Horacioimpen · June 6, 2023 at 4:45 pm
http://windows1.listbb.ru/viewtopic.php?f=3&t=86
mrmonfes · June 6, 2023 at 4:48 pm
На сайте https://lenstroykomplekt.ru/ вы сможете воспользоваться такими услугами, как монтаж, кровельные работы, реконструкция кровли, монтажные и строительные работы на различных объектах Москвы и области. В бригаде работают квалифицированные, компетентные сотрудники, которые применяют не только свой полученный опыт, инновационное оборудование, но и качественный инвентарь. Вот почему результат оправдает все ожидания, сохранится на длительное время. Работы выполняются по доступным расценкам.
Horacioimpen · June 6, 2023 at 4:49 pm
http://moskovskij.getbb.ru/viewtopic.php?f=12&t=275
JohnHes · June 6, 2023 at 6:02 pm
Try out the flavorful [url=https://killapods.eu/product/elf-bar-strawberry-ice/]Elf Bar Strawberry Ice[/url] for a revitalizing experience.
blowcrJIt · June 6, 2023 at 6:10 pm
На сайте http://www.visotaspb.ru/ вы сможете заказать такие важные услуги, как: высотные работы, промышленный альпинизм, герметизация межпанельных швов, ремонт парадных, подъездов. Все услуги оказываются на высоком уровне, качественно и профессионально, работы будут выполнены в минимальные сроки. Применяется инновационное оборудование, которое позволяет выполнить работы в минимальные сроки. Услуги оказываются с привлечением автовышек, строительных лесов. Для того чтобы заказать какую-либо из перечисленных работ, необходимо позвонить по телефону.
Horacioimpen · June 6, 2023 at 6:19 pm
http://recomp.bestbb.ru/viewtopic.php?id=43
Horacioimpen · June 6, 2023 at 6:28 pm
http://transexit.g-talk.ru/viewtopic.php?f=10&t=1224
JohnHes · June 6, 2023 at 6:35 pm
Try out the flavorful [url=https://killapods.eu/product/elf-bar-watermelon/]Elf Bar Watermelon[/url] for a satisfying experience.
JohnHes · June 6, 2023 at 6:45 pm
Try out the refreshing [url=https://killapods.eu/product/shiro-tingling-mint/]Shiro Tingling Mint[/url] for a unique experience.
JohnHes · June 6, 2023 at 6:52 pm
Try out the refreshing [url=https://killapods.eu/product/grant-fresh-mint/]Grant Fresh Mint[/url] for a unique experience.
JohnHes · June 6, 2023 at 7:03 pm
Try out the refreshing [url=https://killapods.eu/product/grant-ice-blueberry/]Grant Ice Blueberry[/url] for a unique experience.
Horacioimpen · June 6, 2023 at 7:17 pm
http://californiarpn2.listbb.ru/viewtopic.php?f=1&t=91
Horacioimpen · June 6, 2023 at 7:20 pm
http://wwwnickru.bestbb.ru/viewtopic.php?id=39
Horacioimpen · June 6, 2023 at 7:29 pm
http://deti.getbb.ru/viewtopic.php?f=43&t=185
Horacioimpen · June 6, 2023 at 7:32 pm
http://postap.bestbb.ru/viewtopic.php?id=74
Horacioimpen · June 6, 2023 at 9:00 pm
https://1001viktorina.ru/forum/viewtopic.php?f=19&t=225
Horacioimpen · June 6, 2023 at 9:09 pm
http://4division.ru/viewtopic.php?f=16&t=4680
lubbeFer · June 6, 2023 at 9:28 pm
На сайте http://kuban.photo вы сможете посмотреть удивительные, разнообразные фотографии Кубани. Здесь вы найдете фотографии архитектуры, городов, интерьеров, людей, различных предметов и объектов, транспорта. Все картинки в отличном качестве, они созданы с профессиональным подходом и любовью к искусству, а также на качественный фотоаппарат. Для того чтобы найти то, что нужно, необходимо воспользоваться специальным фильтром. Регулярно выкладываются новые фотографии на обозрение вам.
Horacioimpen · June 6, 2023 at 9:54 pm
https://bridgemoscow.ru/forum/viewtopic.php?f=12&t=9748
Horacioimpen · June 6, 2023 at 9:57 pm
http://testruslit.ru/forum/viewtopic.php?f=2&t=45
Horacioimpen · June 6, 2023 at 10:06 pm
http://www.rusbil.ru/forum/viewtopic.php?p=5161
Horacioimpen · June 6, 2023 at 10:09 pm
http://elhovka.nn.ru/viewtopic.php?f=16&t=12501
Horacioimpen · June 6, 2023 at 11:34 pm
http://mockwanasvyazi.getbb.ru/viewtopic.php?f=12&t=206
Horacioimpen · June 6, 2023 at 11:42 pm
http://lspdcg.listbb.ru/viewtopic.php?f=2&t=30
Horacioimpen · June 7, 2023 at 12:28 am
http://or1gano.80lvl.ru/viewtopic.php?f=10&t=307
Horacioimpen · June 7, 2023 at 12:32 am
http://forum.dsbb.ru/viewtopic.php?p=851
Horacioimpen · June 7, 2023 at 12:40 am
https://www.ztinfo.info/forum-post/22080/
Horacioimpen · June 7, 2023 at 12:43 am
http://zorkiy.bestbb.ru/viewtopic.php?id=44
Horacioimpen · June 7, 2023 at 2:09 am
http://voskresensk.moibb.ru/viewtopic.php?f=20&t=240
Horacioimpen · June 7, 2023 at 2:17 am
http://almet.listbb.ru/viewtopic.php?f=12&t=52
Horacioimpen · June 7, 2023 at 3:03 am
http://forum.ivlena.ru/viewtopic.php?f=25&t=402
Horacioimpen · June 7, 2023 at 3:06 am
http://kvartal8b.getbb.ru/viewtopic.php?f=2&t=12373
Horacioimpen · June 7, 2023 at 3:14 am
http://etymology.ru/frm/index.php?topic=56356.new
Horacioimpen · June 7, 2023 at 3:18 am
https://forum.polonia.kharkov.ua/index.php?topic=772.0
Alvaroemaic · June 7, 2023 at 4:21 am
https://kalejdoscop.ru/samye-populyarnye-czeli-na-kotorye-mozhno-vzyat-kredit-na-10-let/
Horacioimpen · June 7, 2023 at 4:43 am
http://hitman.getbb.ru/viewtopic.php?f=16&t=502
Horacioimpen · June 7, 2023 at 4:51 am
http://forum.computest.ru/post/426706/
atalikFek · June 7, 2023 at 5:06 am
На сайте https://fakty.org/ вы сможете ознакомиться с актуальными, свежими новостями Украины, которые касаются экономики, политики, здоровья, культуры и различных других сфер деятельности. Имеются данные, посвященные спецоперации. Важным моментом является то, что все материалы являются достоверными, собраны из лучших источников, а потому им точно можно доверять. Изучите всю информацию, которая находится на портале. Она прольет свет на многие вещи. Каждая новость сопровождается картинкой, указана дата, когда ее выложили.
conkeDannY · June 7, 2023 at 5:14 am
На сайте https://yudin7.com/ вы сможете воспользоваться услугами квалифицированного и опытного дизайнера Семена Юдина. У него соответствующее образование, а также большой опыт работы, который позволяет браться даже за самые сложные проекты. Ознакомьтесь с примерами работ, которые представлены на портале. Семен оказывает такие услуги, как: дизайн интерьера, комплектация, бюджетирование, авторский надзор, работы «под ключ». Сейчас на определенные работы действует скидка. Весь процесс сотрудничества описан на сайте. Ознакомьтесь с ним сейчас.
ockouVaphY · June 7, 2023 at 5:32 am
На сайте https://utmmetki.ru/ воспользуйтесь генератором UTM-меток. Для этого необходимо ввести в поисковую строку адрес страницы, после чего выбрать источник трафика, обозначить необходимые параметры. Теперь просто скопируйте полученный результат. Кроме того, на этой странице вы найдете и другую полезную информацию о генераторе. Это позволит вам стать более осведомленным в данном вопросе. Также есть материалы о том, какие ютм метки существуют. Информация поможет вам в выполнении ежедневных рабочих обязанностей.
ankovdib · June 7, 2023 at 5:39 am
На сайте http://sidelki-msk.ru вы сможете заказать обратный звонок для того, чтобы менеджер вам перезвонил и подобрал сиделку, домработницу, няню. Оказывается всесторонняя комплексная поддержка, при необходимости сотрудник будет заменен, если вас что-то не устроило. Во время подбора персонала каждый специалист проходит проверку на соответствие важным критериям. Именно поэтому в компании работают только компетентные, квалифицированные сотрудники, которые отлично знакомы с нюансами своей работы.
azaropok · June 7, 2023 at 5:46 am
На сайте https://rus-film.fun/ вы сможете посмотреть новые русские сериалы, снятые талантливыми режиссерами. Здесь они представлены в огромном многообразии и самого разного жанра. В фильмах снимаются популярные, лучшие актеры, которые знают, как удивить публику. На сайте представлено огромное количество фильмов, сериалов на самый взыскательный вкус, что позволит подобрать вариант, опираясь на предпочтения. Для того чтобы найти то, что необходимо, просто воспользуйтесь поиском.
JohnHes · June 7, 2023 at 6:05 am
Try out the refreshing [url=https://killapods.eu/product/grant-ice-peach/]Grant Ice Peach[/url] for a unique experience.
JohnHes · June 7, 2023 at 6:30 am
Try out the refreshing [url=https://killapods.eu/product/grant-mango-lime/]Grant Mango Lime[/url] for a unique experience.
JohnHes · June 7, 2023 at 6:55 am
Check out the sweet pouches at [url=https://killapods.eu/product/killa-cola-extreme/]Killa Cola Extreme[/url].
JohnHes · June 7, 2023 at 7:40 am
Check out the Killa-Cold Mint Extreme XXL at [url=https://killapods.eu/product/killa-cold-mint-extreme-xxl/]Killapods.eu[/url].
Jamesdup · June 7, 2023 at 8:53 am
Experience the exhilarating freshness of [url=https://killapods.eu/product/killa-cold-mint-extreme-xxl/]Killa-Cold Mint Extreme XXL[/url] for a premium sensation like no other!
enanaBer · June 7, 2023 at 9:11 am
На сайте https://dolzhitov.ru/ вы сможете оформить обратный звонок для того, чтобы заказать производство каминов, печей, барбекю. Специалист только для вас разработает модель с учетом индивидуальных предпочтений и всего за месяц. В работе применяются уникальные и инновационные методики, высокотехнологичные материалы, которые помогут получить именно тот результат, который нужен. Звоните и заказывайте проект прямо сейчас. Жамьян Должитов сам вытачивает небольшие изделия из кирпича.
spiriva pharmacy · June 7, 2023 at 11:53 am
imdur prices imdur for sale imdur 40mg tablets
Anthonyrof · June 7, 2023 at 1:03 pm
doma-iz-brusa-777.ru
Jamesdup · June 7, 2023 at 2:12 pm
Get a blast of flavor with [url=https://killapods.eu/product/killa-cola-extreme/]Killa Cola Extreme[/url] and enjoy an intense nicotine sensation!
Jamesdup · June 7, 2023 at 2:38 pm
Refresh your senses with the intense flavor of [url=https://killapods.eu/product/killa-melon-extreme/]Killa Melon Extreme[/url] for a unique nicotine experience!
Jamesdup · June 7, 2023 at 2:50 pm
Enjoy the refreshing blend of banana and ice in [url=https://killapods.eu/product/killa_banana_ice/]Killa Banana Ice[/url] for a cool nicotine experience!
genadiapaph · June 7, 2023 at 3:06 pm
На сайте https://www.krasser.ru/met_izdel.html закажите производство металлоизделий, а также конструкций, выполненных из металла, баки, емкости и многое другое. Для того чтобы сориентироваться в выборе, воспользуйтесь прайс-листом, где указаны все расценки. Работы выполняются в соответствии с ГОСТом и строго по техническому заданию, эскизам, чертежам. Стоимость проекта будет зависеть от его сложности и масштаба. Воспользуйтесь и вы услугами популярной компании, которая предлагает весь комплекс работ, соблюдает сроки.
mikimaEntem · June 7, 2023 at 3:53 pm
На сайте https://www.globussalon.ru вы сможете приобрести все, что необходимо для очистки пруда, аэраторы, а также пленку для пруда, нассы для фильтров, ручьи, изливы, подводную подсветку и многое другое. Кроме того, имеются интерьерные и садовые фонтаны. Только на этом сайте самый большой ассортимент того, что вам необходимо для организации пространства. Вся продукция высокого качества, надежная, а потому прослужит очень долго. Выбирайте и заказывайте все, что вам необходимо. Все товары продаются по доступным ценам.
yourfrSah · June 7, 2023 at 4:04 pm
На сайте https://kamaz97.ru/ вы сможете получить всю необходимую информацию, которая касается КАМАЗов. Так вы узнаете о самых успешных проектах, о том, почему именно эти громоздкие машины входят в список самых надежных, практичных и добротных. Есть данные и про сцепление на грузовиках, имеется информация про панель евро: о преимуществах и характеристиках. Опубликован материал о передних подшипниках и причинах их поломки, о том, как произвести замену, а также обслуживание. Так вы узнаете о том, как заменить некоторые детали.
haraoHib · June 7, 2023 at 4:29 pm
На сайте https://t.me/capitalskills вы сможете записаться на уроки в финансовую Академию трейдинга. Вы освоите трейдинг вместе с командой высококлассных специалистов, которые хорошо понимают в этой сфере. Они научат вас всему, что знают сами. Важным моментом является то, что в Академии установлен удобный график работы, а потому вам не нужно будет под него подстраиваться. На уроки действуют доступные расценки. Все преподаватели компетентные и опытные в вопросах трейдинга. Регистрируйтесь и забирайте свое место.
Jamesdup · June 7, 2023 at 6:21 pm
Unleash the invigorating mint freshness with [url=https://killapods.eu/product/killa-cold-mint/]Killa Cold Mint[/url] for a revitalizing nicotine experience!
Jamesdup · June 7, 2023 at 6:23 pm
Experience the rich and creamy taste of [url=https://killapods.eu/product/killa-cappuccino/]Killa Cappuccino[/url] for a delightful nicotine experience!
EugeneGox · June 7, 2023 at 6:40 pm
https://jet-x.games/uk/play-jet-x-at-pin-up-online-casino/
Jamesdup · June 7, 2023 at 6:42 pm
Unleash the fresh winter coolness with [url=https://killapods.eu/product/killa_frosted_mint/]Killa Frosted Mint[/url] for a revitalizing nicotine experience!
Jamesdup · June 7, 2023 at 6:48 pm
Enjoy the icy tang of grapes with [url=https://killapods.eu/product/killa_grape_ice/]Killa Grape Ice[/url] for a sensational nicotine experience!
misteEnedy · June 7, 2023 at 6:49 pm
На сайте https://best-vendor.ru/ вы сможете ознакомиться со всем ассортиментом, который производит завод «Энерго Техстрой 2000». По телефону вы сможете заказать производственные материалы, а также высокотехнологичное оборудование для самых разных нужд. Важным моментом является то, что вся продукция реализуется по привлекательным ценам, а доставка осуществляется максимально оперативно. Оформить заказ можно по телефону. Закажите провода, кабели, стальной канат, смазки, масла, тару, емкости и многое другое.
Jamesdup · June 7, 2023 at 6:55 pm
Relish the tropical delight of [url=https://killapods.eu/product/killa_mango_ice/]Killa Mango Ice[/url] for an exciting nicotine experience!
Jamesdup · June 7, 2023 at 7:00 pm
Delight in the tropical flavor of [url=https://killapods.eu/product/killa-pinapple/]Killa Pinapple[/url] for a unique nicotine experience!
Jamesdup · June 7, 2023 at 7:01 pm
Experience the icy cool freshness with [url=https://killapods.eu/product/killa_ice_frosted/]Killa Ice Frosted[/url] for a thrilling nicotine experience!
fedyaDiawn · June 7, 2023 at 9:30 pm
На сайте https://premier-park.ru вы сможете оформиться в качестве водителя такси и под ключ. Каждый водитель получает возможность подключиться без автомобиля и с арендой этой компанией. Но важно, чтобы водителю было более 21 года, а водительский стаж – от 3 лет. Это может быть арендованный либо свой автомобиль. Любой водитель сможет рассчитывать на круглосуточную поддержку, консультацию юристов, налоговые консультации, а также профсоюзную защиту. Отправить заявку на подключение вы сможете прямо сейчас.
angelsew · June 7, 2023 at 9:32 pm
По ссылке https://aovniis.ru/uchebnyj-centr-vniis/programmy-obucheniya/podgotovka-ehkspertov-po-sistemam-menedzhmenta-smk/ вы сможете записаться на подготовку экспертов по системам менеджмента. На качественное обучение потребуется всего лишь 72 часа. За это время работники получат исчерпывающую информацию и освоят тему. Дисциплину преподают лучшие учителя, которые обучат всему, что знают сами. Изучите программу курса прямо сейчас, чтобы иметь о ней полное представление.
Dillonchumn · June 7, 2023 at 9:37 pm
http://ecoinfowiki.info/index.php?title=3
Horacioimpen · June 7, 2023 at 10:04 pm
http://zdshi-tula.ru/forum/?PAGE_NAME=message&FID=1&TID=16&MID=16&result=new
Horacioimpen · June 7, 2023 at 10:08 pm
https://quadrivium.ru/forum/messages/forum1/topic24/message24/?result=new
Horacioimpen · June 7, 2023 at 10:18 pm
http://yourcareer.club/forum/messages/forum1/topic24/message24/?result=new
Horacioimpen · June 7, 2023 at 10:23 pm
https://www.kharkov-balka.com/showthread.php?p=141011
Adrianphaby · June 7, 2023 at 10:25 pm
http://mlmwmzmillioner.rolevaya.com/viewtopic.php?id=8132
Horacioimpen · June 8, 2023 at 12:07 am
https://chere.4bb.ru/viewtopic.php?id=4735
Horacioimpen · June 8, 2023 at 12:18 am
http://telesat.gtaserv.ru/viewtopic.php?f=251&t=3237
chernDug · June 8, 2023 at 12:33 am
На сайте https://adventuresinminecraft.com/home вы сможете погрузиться в удивительный мир Minecraft. Обязательно посетите магазин, в котором вы найдете все, что нужно для активной, яркой и необычной игры. Оформите покупку всего того, чтобы получить новые возможности прямо сейчас. И самое главное, что покупка обойдется вам недорого. Мгновенная оплата наиболее комфортным для вас способом. После того, как сумма поступит на счет, на почту придет оповещение. Есть раздел с последними покупками.
Adrianphaby · June 8, 2023 at 12:52 am
https://infocusgame.com/forum/viewtopic.php?t=33204
Adrianphaby · June 8, 2023 at 1:05 am
http://www.automania.by/forum/index.php?showtopic=15659
Horacioimpen · June 8, 2023 at 1:13 am
https://minskmoto.ru/viewtopic.php?t=9466
Horacioimpen · June 8, 2023 at 1:17 am
http://kutejnikovo-61.ru/forum/messages/forum1/topic39/message37/?result=new
Horacioimpen · June 8, 2023 at 1:27 am
http://forum.pskovedu.ru/viewtopic.php?pid=7647
Horacioimpen · June 8, 2023 at 1:31 am
http://jurkido.ru/forum/viewtopic.php?f=6&t=92
Adrianphaby · June 8, 2023 at 2:21 am
http://forum.computest.ru/post/435571/
Adrianphaby · June 8, 2023 at 2:26 am
http://mihail.ekafe.ru/viewtopic.php?f=16&t=4072
Adrianphaby · June 8, 2023 at 2:39 am
https://probannoe.ru/forum/viewtopic.php?f=3&t=2038
Adrianphaby · June 8, 2023 at 2:44 am
https://ya.9bb.ru/viewtopic.php?id=2178
krasoDet · June 8, 2023 at 2:51 am
На сайте https://tenchat.ru/1180791 ознакомьтесь с информацией, посвященной Михаилу Забегалову. Он является успешным руководителем проектов в аутсорс ИТ – компании. Главное направление деятельности – это разработка сервисов и корпоративных систем. Кроме того, разрабатывает приложения. В его профиле есть информация об импортозамещении. Имеются данные о том, какие риски возможны при инвестировании в систему управления. Все статьи написаны экспертами, квалифицированными специалистами, которые помогут и вам разобраться в вопросе.
Horacioimpen · June 8, 2023 at 3:12 am
http://sciencenewhop.maxbb.ru/topic83.html
Horacioimpen · June 8, 2023 at 3:22 am
http://csexpert.4adm.ru/viewtopic.php?f=70&t=1208
Horacioimpen · June 8, 2023 at 4:16 am
http://mvduniversitetpiter.flybb.ru/topic147.html
Horacioimpen · June 8, 2023 at 4:20 am
https://ya.2bb.ru/viewtopic.php?id=12979
Adrianphaby · June 8, 2023 at 5:17 am
https://mirnuy.forumieren.de/t5063-topic
egtyaexped · June 8, 2023 at 5:23 am
На сайте http://nkazantseva.com/ вы сможете записаться по телефону на такую необходимую терапевтическую процедуру, как баротерапия. Она базируется на использовании физиологического давления воздуха. Если пройти полный курс, то этот момент позволит полностью восстановить здоровье каждого члена семьи. НЛК гарантирует длительный терапевтический эффект даже после окончания курса. А еще выступает в качестве профилактики преждевременного старения. В обязательном порядке доктор анализирует то, как работает методика и делает соответствующие выводы.
Adrianphaby · June 8, 2023 at 5:29 am
http://inlosangeles.rolka.me/viewtopic.php?id=1944
Horacioimpen · June 8, 2023 at 6:55 am
https://dmbd.space/read-blog/354035
Adrianphaby · June 8, 2023 at 7:01 am
http://spb.getbb.ru/viewtopic.php?f=21&t=11016
Adrianphaby · June 8, 2023 at 7:05 am
https://livestreet.imbachat.com/2023/06/03/povyste-svoy-uroven-obrazovaniya-kupite-diplomy-lyubogo-urovnya-dlya-rasshireniya-svoih-znaniy.html
Adrianphaby · June 8, 2023 at 7:12 am
https://wiki.i-edu.ru/mediawiki/index.php/%D0%97%D0%B0%D0%BA%D0%B0%D0%B7%D0%B0%D0%BB%D0%B8_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D1%8B_%D0%BE_%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC_%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8_%D0%A5%D0%B0%D0%BD%D1%82%D1%8B-%D0%9C%D0%B0%D0%BD%D1%81%D0%B8%D0%B9%D1%81%D0%BA
Horacioimpen · June 8, 2023 at 7:13 am
http://www.nhps1914.com/wiki/Избавьтесь_от_преград_на_пути_к_успеху:_Купить_диплом_и_открыть_новые_возможности
Adrianphaby · June 8, 2023 at 7:18 am
http://kolhos.listbb.ru/viewtopic.php?f=2&t=42
Adrianphaby · June 8, 2023 at 7:29 am
https://wiki.mgpu.ru/index.php/Избавьтесь_от_преград_на_пути_к_успеху:_Купить_диплом_и_открыть_новые_возможности
Adrianphaby · June 8, 2023 at 7:37 am
http://bioniclerpg.getbb.ru/viewtopic.php?f=6&t=727
Horacioimpen · June 8, 2023 at 9:29 am
http://abroad.ekafe.ru/viewtopic.php?f=5&t=1120
Horacioimpen · June 8, 2023 at 9:42 am
http://forum.fiat-club.ru/blog.php?b=2508
ingofarbreks · June 8, 2023 at 10:00 am
Сайт https://mapestate.ru/ представляет собой карту объектов недвижимости. Здесь находятся новостройки, жилые комплексы и многое другое, что обязательно вызовет у вас интерес как объект для покупки либо инвестирования. Для того чтобы подыскать тот вариант, который вам нужен, необходимо ввести город, регион, улицу либо населенный пункт в специальную графу. Отметьте тип жилой недвижимости, а также количество комнат. При необходимости вы сможете абсолютно бесплатно подобрать квартиру. Для удобства перейдите на сайт застройщика.
orshkoHow · June 8, 2023 at 10:02 am
На сайте https://irossiya.ru/ вы сможете получить всю необходимую информацию о России. Есть последние актуальные новости, данные, касающиеся истории, культуры родного края. Имеются сведения о достопримечательностях, которые имеются в городах России с подробным описанием, а также цветными и красивыми фотографиями, схемами проезда, адресом местонахождения и другими данными. Опубликованы данные о самых редких, популярных достопримечательностях, информация о путешествиях, список городов и многое другое. Имеются и ценные советы от экспертов, которые помогут сориентироваться в потоке информации.
Jamesdup · June 8, 2023 at 10:17 am
Refresh your senses with the invigorating [url=https://killapods.eu/product/velo-eucalyptus-x-strong/]Velo Eucalyptus X Strong[/url] for an intense nicotine experience!
Jamesdup · June 8, 2023 at 10:20 am
Unleash the storm with [url=https://killapods.eu/product/velo-cool-storm-x-strong/]Velo Cool Storm X Strong[/url] for an exhilarating nicotine experience!
Jamesdup · June 8, 2023 at 10:44 am
Experience the ultimate cooling sensation with [url=https://killapods.eu/product/velo-freeze-slim-ultra/]Velo Freeze Slim Ultra[/url] for a thrilling nicotine experience!
Adrianphaby · June 8, 2023 at 10:52 am
https://moscow.topbb.ru/post.php?fid=3
Adrianphaby · June 8, 2023 at 10:57 am
https://briards.mybb.ru/viewtopic.php?id=1729#p49391
Michaeldup · June 8, 2023 at 11:03 am
Experience an explosion of flavor with the [url=https://killapods.eu/product/velo-fresh-jalapeno/]Velo Fresh Jalapeno[/url] nicotine pouches. The tangy freshness combined with the boldness of jalapeno offers a one-of-a-kind experience for your taste buds!
Christopherdup · June 8, 2023 at 11:09 am
Experience a refreshing burst of flavor with [url=https://killapods.eu/product/velo-iced-melon-mini/]Velo Iced Melon Mini[/url] nicotine pouches. The sweet melon taste mixed with an icy freshness creates a perfect balance that invigorates the palate!
Horacioimpen · June 8, 2023 at 11:10 am
http://vbocharov-and-friends.ru/viewtopic.php?f=21&t=2769&sid=0c34148a031a8bfc2956dde7f39de4d0
Adrianphaby · June 8, 2023 at 11:10 am
http://samsxi.bestbb.ru/viewtopic.php?id=19
Elizabethdup · June 8, 2023 at 11:13 am
Savor the sumptuous taste of [url=https://killapods.eu/product/killa_strawberry_cheescake/]Killa Strawberry Cheesecake[/url] nicotine pouches. With the luscious blend of strawberry and cheesecake flavors, this pouch is a delightful treat for your senses!
Adrianphaby · June 8, 2023 at 11:15 am
http://forum.hi-def.ru/index.php?showtopic=11869
Alexanderdup · June 8, 2023 at 11:15 am
Dive into the exotic fusion of strawberry and lychee with [url=https://killapods.eu/product/killa_strawberry_lychee/]Killa Strawberry Lychee[/url] nicotine pouches. The tropical mix of flavors promises a unique and vibrant experience for your taste buds!
Adrianphaby · June 8, 2023 at 11:30 am
http://karapuziki.0pk.me/viewtopic.php?id=5681#p87233
rishinGok · June 8, 2023 at 12:03 pm
На сайте https://vk.com/youjob вы сможете подыскать работу для молодежи. Вся она разносторонняя, интересная, а главное, что не требуется опыт. Именно поэтому идеально подойдет для студентов. Однако необходимо, чтобы у кандидата было желание качественно выполнять свою работу и в соответствии с требованиями. А если имеется еще и стремление развиваться, то вы и вовсе – бесценный кадр. Ежедневно на сайте появляются новые вакансии, а потому вы обязательно найдете то, к чему лежит душа.
vlovskroage · June 8, 2023 at 12:37 pm
На сайте https://shahter.net вы найдете полезную, актуальную информацию, которая касается политики, экономики и происшествий на Украине. Вы узнаете о том, когда подорожает газ, что произойдет с субсидиями после подорожания электроэнергии. Есть информация относительно пособий по безработице в этом году. Все обзоры честные, актуальные и помогут получить исчерпывающую информацию относительно обстановки на Украине. Ежедневно на портале публикуются новые данные, изучить которые будет интересно и вам
romoclwer · June 8, 2023 at 12:42 pm
На сайте https://nash-bro.clients.site/ вы сможете записаться в барбершоп, ногтевую студию. Предоставляются такие услуги, как: педикюр, льготная стрижка, маникюр. Оплата может быть произведена любым, наиболее комфортным способом. В студии имеется бесплатный интернет. Фотогалерея поможет вам сориентироваться во всех услугах. В компании работают квалифицированные и опытные мастера, которые выполнят работу именно так, как вы хотите и в соответствии с пожеланиями. Установлены доступные цены, а работы выполняются на качественной косметике популярных брендов.
Jonathandup · June 8, 2023 at 1:02 pm
Experience the invigorating blast of mint with [url=https://killapods.eu/product/killa-spearmint-extreme/]Killa Spearmint Extreme[/url] nicotine pouches. The intense spearmint flavor is sure to leave your palate refreshed and wanting more!
Samanthadup · June 8, 2023 at 1:10 pm
Embark on a flavorful journey with [url=https://killapods.eu/product/killa-white-coffee/]Killa White Coffee[/url] nicotine pouches. With rich coffee flavors infused with a hint of creaminess, it’s the ultimate indulgence for coffee enthusiasts!
antoshCox · June 8, 2023 at 1:17 pm
На сайте https://j-center.ru/ вы сможете записаться в школу парикмахерского искусства «J-center Studio», где вы получите отличную, прибыльную профессию. Все занятия происходят на клиентах, минимальное количество теории. Для того чтобы лучше ознакомиться с информацией, необходимо рассмотреть фотографии. Каждый выпускник школы является состоявшимся специалистом, который сможет быстро устроиться на работу в любой салон красоты и зарабатывать приличные деньги. Существует несколько форматов обучения, включая индивидуальные, в группах.
Adrianphaby · June 8, 2023 at 1:18 pm
https://na.yaua.ru/viewtopic.php?id=1382#p5458
Rebeccadup · June 8, 2023 at 1:21 pm
Transport yourself to a tropical paradise with [url=https://killapods.eu/product/killa-watermelon-extreme/]Killa Watermelon Extreme[/url] nicotine pouches. The succulent watermelon flavor is bursting with sweetness and freshness, perfect for a summer day!
Adrianphaby · June 8, 2023 at 1:22 pm
https://www.vaca-ps.org/blogs/56657/Получите-уважение-и-признание-Купить-диплом-и-доказать-свою-компетентность
Emilydup · June 8, 2023 at 1:25 pm
Brace yourself for an arctic blast with [url=https://killapods.eu/product/killa-x-cold-mint/]Killa X Cold Mint[/url] nicotine pouches. The intense cold mint flavor is an exhilarating experience that revitalizes your senses and keeps you fresh!
Adrianphaby · June 8, 2023 at 1:26 pm
https://club2108.ru/forum/viewtopic.php?pid=172261#p172261
Oliverdup · June 8, 2023 at 1:32 pm
Embark on a tropical adventure with [url=https://killapods.eu/product/killa_mini_banana_ice/]Killa Mini Banana Ice[/url] nicotine pouches. The combination of ripe bananas and frosty ice creates a sensational experience that’s invigorating and delightful.
Horacioimpen · June 8, 2023 at 1:35 pm
http://autoprajs.ru/10222.html
piffycoire · June 8, 2023 at 1:36 pm
На сайте http://www.jur-podolsk.ru вы сможете задать вопрос юристу либо позвонить ему по обозначенному телефону. В этой компании вас ожидает профессиональная юридическая помощь, а также умеренные цены, огромный выбор юридических услуг, а потому обратиться за помощью вы сможете по любому вопросу. Компания отличается огромным опытом – более 10 лет в области предоставления услуг и дала 1000 консультаций. Всего более 500 довольных клиентов. Сотрудниками установлены честные, прозрачные отношения с клиентами, а потому они сразу знают исход дела.
Alexanderdup · June 8, 2023 at 1:38 pm
Dive into a refreshing experience with [url=https://killapods.eu/product/killa_mini_cold_mint/]Killa Mini Cold Mint[/url] nicotine pouches. The frosty mint flavor sends shivers down your spine while delivering a smooth and invigorating sensation. Perfect for an icy fresh breath!
Isabelladup · June 8, 2023 at 1:41 pm
Step into a winter wonderland with [url=https://killapods.eu/product/killa_mini_frosted_mint/]Killa Mini Frosted Mint[/url] nicotine pouches. The blend of frosty coolness and refreshing mint creates a spectacular sensation that will leave you feeling invigorated and refreshed. Get ready to embrace the frost!
Madisondup · June 8, 2023 at 1:44 pm
Satisfy your berry cravings with [url=https://killapods.eu/product/killa_mini_blueberry/]Killa Mini Blueberry[/url] nicotine pouches. The rich blueberry flavor is tantalizingly sweet and bursting with freshness, delivering an incomparable experience.
Adrianphaby · June 8, 2023 at 1:45 pm
http://www.ilk-nachalo.ru/blog.php?u=1670&b=260
Adrianphaby · June 8, 2023 at 1:53 pm
http://forum.webmvc.com/index.php?/topic/92137-ускорьте-свою-карьеру-купить-диплом-и-стать-востребованным-специалистом/
yes-dacha.ru · June 8, 2023 at 2:04 pm
It’s a shame you don’t have a donate button! I’d most certainly donate to this excellent blog! I suppose for now i’ll settle for book-marking and adding your RSS feed to my Google account. I look forward to brand new updates and will talk about this blog with my Facebook group. Chat soon!
Horacioimpen · June 8, 2023 at 2:42 pm
http://www.tamboff.ru/forum/viewtopic.php?p=7666598
Horacioimpen · June 8, 2023 at 2:48 pm
http://старше55-форум.москва/blogs/interest/kupit-dokumenty-ob-obrazovanii-dostavka-po-rf.php
Adrianphaby · June 8, 2023 at 3:01 pm
http://koxma.4adm.ru/viewtopic.php?f=258&t=4807
Adrianphaby · June 8, 2023 at 3:07 pm
http://c90226sl.beget.tech/2023/05/31/individualnye-diplomy-po-vashim-trebovaniyam-zakazhite-pryamo-sejchas/
Adrianphaby · June 8, 2023 at 5:15 pm
https://mymoscow.forum24.ru/?1-6-0-00013072-000-0-0-1685996104
Horacioimpen · June 8, 2023 at 5:19 pm
http://wiki.68edu.ru/w/%D0%9D%D0%B0%D1%81%D1%82%D0%BE%D1%8F%D1%89%D0%B8%D0%B9_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC_%D0%BD%D0%B0_%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC_%D0%B1%D0%BB%D0%B0%D0%BD%D0%BA%D0%B5_%D0%9D%D0%BE%D0%B2%D0%BE%D0%BD%D0%B8%D0%BA%D0%BE%D0%BB%D0%B0%D0%B5%D0%B2%D1%81%D0%BA%D0%B8%D0%B9
Adrianphaby · June 8, 2023 at 5:32 pm
https://wiki.mgpu.ru/index.php/Обеспечьте_свое_будущее:_Купите_диплом_любого_уровня_подготовки_на_нашем_сайте
Adrianphaby · June 8, 2023 at 5:33 pm
http://g95334gq.beget.tech/2023/06/01/kupite-svoy-diplom-segodnya.html
Josephalavy · June 8, 2023 at 6:47 pm
https://i-b-b.su
Josephalavy · June 8, 2023 at 6:54 pm
https://47-63.ru
Jeffreythoda · June 8, 2023 at 7:03 pm
https://btc-pulse.com/why-south-koreas-exchanges-delisting-litecoin-is-a-non-issue/
Jeffreythoda · June 8, 2023 at 7:09 pm
https://btc-pulse.com/pepe-coin-skyrockets-90-after-okx-listing-enters-top-100-crypto-list/
Josephalavy · June 8, 2023 at 7:20 pm
https://sc6-lipetsk.ru
Jeffreythoda · June 8, 2023 at 7:26 pm
https://btc-pulse.com/celebrity-boxer-is-reportedly-broke-after-crypto-investment-goes-south/
echkaCrame · June 8, 2023 at 7:31 pm
На сайте https://bigpicture.ru/ вы сможете ознакомиться с интересными новостями в виде картинок. Все данные свежие, актуальные, а потому ими хотят поделиться создатели портала. Любопытные материалы касаются самых разных тем, включая фотографии, хранения денежных средств в настоящее и прошлое время, достопримечательностей, самых красивых мест для отдыха. Все статьи сопровождаются интересным и любопытным текстом, который хочется дочитать до конца. Имеются удивительные ретро фото, которые повергнут вас в шок.
Jeffreythoda · June 8, 2023 at 7:32 pm
https://btc-pulse.com/gemini-set-to-expand-in-asia-with-engineering-hub-in-india-and-regional-ceo-appointment/
Трансфер в Шерегеш · June 8, 2023 at 7:50 pm
Howdy would you mind stating which blog platform you’re working with? I’m looking to start my own blog in the near future but I’m having a tough time selecting between BlogEngine/Wordpress/B2evolution and Drupal. The reason I ask is because your design seems different then most blogs and I’m looking for something completely unique. P.S Apologies for getting off-topic but I had to ask!
ndryusShips · June 8, 2023 at 8:15 pm
На сайте https://ritualnoe-buro-vrn.ru вы сможете ознакомиться с номером телефона для того, чтобы заказать поминальный обед. Интерьер кафе выдержан в спокойной, лаконичной цветовой гамме, которая приятна глазу. Во время составления заказа обслуживание оплачивается отдельно. При желании можно принести конфеты, напитки, а также печенье. Если остались вопросы, то введите в специальное поле свой номер телефона, чтобы вам перезвонили. На сайте можно ознакомиться с тем, какие блюда входят в меню.
Davidcrelt · June 8, 2023 at 8:44 pm
cro price prediction 2025 https://blockchainreporter.net/cro-price-prediction-2025/
ybakocarne · June 8, 2023 at 9:13 pm
На сайте https://www.online-strahovka.info вы сможете приобрести полис ОСАГО по России. Отсутствуют дополнительные платежи, переплаты. Вы получаете возможность заказать только оригинальный, подлинный документ. На оформление ОСАГО потребуется не более 15 минут. Для начала нужно будет заполнить все свои данные на калькуляторе, а затем выбрать лучшее предложение на рынке. Далее необходимо оплатить полис. Это происходит абсолютно безопасно. На следующем этапе после оплаты полис будет выслан на электронную почту.
Jeffreythoda · June 8, 2023 at 10:16 pm
https://btc-pulse.com/crypto-coms-cronos-rising-is-the-7th-largest-chain-by-defi-tvl/
Alvaroemaic · June 8, 2023 at 10:18 pm
strojka-veka.info
elikovknoff · June 8, 2023 at 10:30 pm
На сайте https://1xbetlegalsport.com/ru/ вы найдете полезную и свежую информацию, которая касается букмекерской конторы 1xBet KZ. Эта компания работает на территории Казахстана, начиная с 2016 года, и заполучила огромное количество положительных отзывов, а также благодарных клиентов, которые рекомендуют компанию своим друзьям, близким. Они смогут выиграть приличную сумму денег. И самое главное, что мировой бренд работает в соответствии с самыми высокими стандартами качества обслуживания, чтобы каждый гемблер остался доволен.
Jeffreythoda · June 8, 2023 at 11:25 pm
https://btc-pulse.com/ethereum-whales-hold-the-largest-amount-of-shib-and-ftx-tokens/
Jeffreythoda · June 8, 2023 at 11:30 pm
https://btc-pulse.com/algorand-launches-their-first-defi-wallet-defly/
Jeffreythoda · June 8, 2023 at 11:41 pm
https://btc-pulse.com/sec-chair-crypto-is-good-but-investors-need-protection/
Jeffreythoda · June 8, 2023 at 11:46 pm
https://btc-pulse.com/the-digital-dollar-will-help-grow-usds-international-standing-fed-chair/
petepaure · June 8, 2023 at 11:52 pm
На сайте https://aionclassic.pro/ вы сможете начать играть в интересную и увлекательную игру, которая понравится не только новичкам, но и профессионалам. Даже добавили ремодели с официального корейского сервера Айон. Каждого пользователя ожидает надежное, качественное соединение, которое обеспечивается по всему миру. Имеются выделенные серверы с программной и аппаратной защитой. Вы сможете начать играть прямо сейчас. Ознакомьтесь с интересной галереей, в которой представлены снимки игроков.
oldenwaday · June 9, 2023 at 12:06 am
На сайте https://deep-well.ru/chto-luchshe-skvazhina-ili-kolodec вы получите исчерпывающую информацию о том, на чем лучше остановиться: на колодце либо скважине. Имеется информация про автономную систему водоснабжения, о колодце и о том, что он собой представляет. Кроме того, перечислены меры, которые необходимо предпринять во время подготовки к строительству колодца. Кроме того, опубликованы и нюансы обустройства. Важным моментом считается то, что колодец необходимо обустраивать вдалеке от источников загрязнений: уборной, скотного двора, бани, септиков.
Jeffreythoda · June 9, 2023 at 2:06 am
https://btc-pulse.com/cardano-founder-criticized-over-recent-ama/
Jeffreythoda · June 9, 2023 at 2:21 am
https://btc-pulse.com/solana-labs-enables-ai-chatbot-to-fetch-blockchain-data-with-chatgpt-plugin/
Jeffreythoda · June 9, 2023 at 3:36 am
https://btc-pulse.com/stellar-lumen-founder-has-81-million-of-xrp-more-to-sell/
Jeffreythoda · June 9, 2023 at 3:42 am
https://btc-pulse.com/deloitte-adopts-kilt-blockchain-for-enhanced-kyc-and-kyb-processes-with-reusable-digital-credentials/
Jeffreythoda · June 9, 2023 at 3:55 am
https://btc-pulse.com/a-fantom-whale-almost-crashed-the-fantom-defi-ecosystem/
Jeffreythoda · June 9, 2023 at 4:01 am
https://btc-pulse.com/bnb-chain-remains-most-active-network-despite-decreased-user-activity/
alimarOxype · June 9, 2023 at 4:13 am
На сайте https://skandi-gk.ru/ вы сможете заказать качественное и надежное торговое оборудование. Компания поставляет холодильное, торговое, стеллажное оборудование, различные системы холодоснабжения. Если вас что-то заинтересовало, то вы всегда сможете запросить коммерческое предложение у менеджера. Он проконсультирует по всем вопросам. Огромный опыт позволяет предложить услуги высокого профессионального уровня. При желании сэкономить воспользуйтесь готовыми проектами.
kiryuCar · June 9, 2023 at 4:37 am
На сайте https://1c8v.ru/ закажите такую важную услугу, как профессиональная разработка ПО на базе 1С. Кроме того, высококлассные сотрудники с легкостью справятся с созданием различных виджетов и нестандартными решениями. Предоставляются в аренду серверы, которые отличаются высокой производительностью. Миссия компании – сделать так, чтобы ваш бизнес стал более успешным. За счет использования уникальных технологий получается добиться необходимого результата и понизить расценки.
gapovgag · June 9, 2023 at 5:00 am
На сайте https://serialexpress.ru вы сможете заказать сериалы, которые представлены здесь в огромном ассортименте. Имеются фильмы самых разных жанров, включая комедии, триллеры, мелодрамы и многое другое. Есть и мультсериалы, которые по достоинству оценят самые маленькие зрители. Опубликованы и теленовеллы, документальное кино. И все это в отличном качестве и с объемным звуком, что позволит насладиться просмотром в полной мере. Доставка сериалов происходит в ближайшее время. Сделайте заказ прямо сейчас!
hcherbog · June 9, 2023 at 5:06 am
В группе https://vk.com/cashback_aliexpress_epn вы найдете действующие промокоды, купоны на скидку в магазине Алиэкспресс на июнь текущего года. А еще здесь очень часто публикуются различные акции, скидки, оповещают о кешбэке на определенный вид продукции. К примеру, вы сможете особо выгодно приобрести детскую продукцию или ноутбуки со скидкой 55%. Также есть список наиболее популярных товаров на Алиэкспресс, которые покупает большинство пользователей. Также на портале имеется вся необходимая информация, которая поможет получить ответы на многочисленные вопросы.
uratoEvabe · June 9, 2023 at 8:35 am
На сайте http://executor-koretska.kiev.ua вы сможете воспользоваться услугами частного исполнителя Корецкой Ирины, которая отличается огромным опытом работы и практикой. Для того чтобы узнать свои шансы на исход дела, необходимо скорей записаться на консультацию, на которой вам все подробно расскажут. Компания оказывает следующие услуги: арест средств, взыскания на права, розыск имущества должника. Ирина Корецкая успешно прошла все необходимые требования, отличается огромным опытом и работает в качестве частного судебного исполнителя.
adimkkes · June 9, 2023 at 11:13 am
На сайте https://rus.probiv.in/ предоставляются услуги, связанные с пробивом информации об автомобилях, людях. Дается полная, исчерпывающая и актуальная информация, которой вы сможете воспользоваться в своих целях. Сайт отличается простым, понятным интерфейсом, а потому воспользоваться услугами сможет каждый желающий. Если и вам необходимо пробить автомобиль, то скорей воспользуйтесь услугами на самых выгодных условиях. И самое главное, что вы получите всю нужную информацию, которая вам обязательно пригодится.
echkaLof · June 9, 2023 at 12:57 pm
На сайте https://pro-agent.kz/ вы сможете подыскать подходящий под свои запросы тур. Поиск охватывает весь мир и ничего не упускает из виду, что позволит быстрее сориентироваться и получить исчерпывающую информацию по всем направлениям. Сервис отличается наличием всех необходимых технологий для того, чтобы вы быстро нашли нужный вариант. При этом все путевки предлагаются по минимальным ценам, чтобы вы сэкономили на путешествии. Не составит труда подобрать тур в рассрочку. Имеются горящие туры, которые позволят сэкономить до 60% от всей суммы.
vasenkegip · June 9, 2023 at 12:59 pm
На сайте https://kzn-tour.ru вы сможете подыскать тур либо отель в данный момент. Обозначьте дату вылета, то, на сколько ночей вы планируете отправиться в отпуск. Также необходимо указать количество путешественников. Для того чтобы сузить количество вариантов, необходимо обозначить количество звезд отеля и другие моменты. Туры предлагаются от нескольких десятков самых надежных туроператоров. Имеются горящие туры, которые предлагаются с очень хорошей скидкой. Вы можете полететь в Таиланд, Азербайджан, Египет, Мармарис.
bogdaOrdek · June 9, 2023 at 1:38 pm
На сайте https://ack-group.ru/ вы сможете записаться на консультацию профессионального психолога. Для новых клиентов действует специальная акция – две первые консультации за 2600 рублей, а 2 первые консультации у семейного психолога обойдутся всего в 3000 рублей, что позволит сэкономить семейный бюджет. Психологический центр «Доверие» предлагает свою профессиональную помощь, чтобы каждый смог справиться даже с самыми серьезными проблемами. Опытные психологи помогут вам поверить в себя и научат жить по-другому.
meshki_tuh · June 9, 2023 at 2:24 pm
мусорные мешки оптом https://ekocontrol.ru/
nechrcep · June 9, 2023 at 2:27 pm
На сайте https://stanok-kpo.kz/ вы сможете узнать стоимость и заказать токарные, фрезерные, сверлильные, долбежные, расточные станки, которые обязательно вам потребуются на производстве для выполнения ряда важных задач. На портале имеются различные спецпредложения, которые позволят сделать приобретение по выгодной стоимости. Есть раздел с популярными моделями, которые всегда в наличии. “Станочный Мир” предлагает в огромном выборе прессы, станки, молоты, гильотины, листогибы. И все это по выгодной и приятной стоимости, с быстрой доставкой.
Haroldneeme · June 9, 2023 at 4:22 pm
https://przamki-zamokmaster-spb.ru/
echayadvog · June 9, 2023 at 6:24 pm
На сайте https://akcenty.life/ вы сможете получить всю необходимую информацию, которая касается того, что происходит на Украине. На портале вы найдете актуальные новости экономики, политики на сегодня. Также есть статьи на тему спецоперации. Все новости свежие, актуальные, а потому читать их интересно. Есть графа с самыми свежими данными, с которыми будет интересно ознакомиться вам. Все материалы сопровождаются фотографиями для наглядности. Статьи ответят на многочисленные вопросы.
eononer · June 9, 2023 at 8:54 pm
На сайте https://petryaj.ru вы сможете приобрести оптом амуницию для животных. Она отличается тем, что выполнена из мягких, приятных к телу материалов, которые не портят шерсть, не натирают чувствительную кожу. Над разработкой трудились лучшие технологи и инженеры, которые смогли создать уникальное изделие и специально для вашего питомца. Особенностью ошейников является дополнительный мягкий слой, который детально повторяет строение тела. Приобретайте оптом ошейники для кошек, собак.
chinnnum · June 9, 2023 at 9:17 pm
На сайте https://clsp.ru/ вы получите всю необходимую правовую информацию, которая касается различных сфер деятельности. Вы узнаете про жилищное право, почитаете статьи на тему семьи и детей, защиты прав потребителей. Есть материалы о том, как развестись, если жена беременна. Узнаете, как доказать врачебную ошибку. Имеются материалы относительно наследственного права, интеллекта. Постоянно появляются новые статьи, достойные вашего внимания. Вы получите ответы на многочисленные вопросы.
uraveTah · June 9, 2023 at 10:27 pm
По ссылке https://yandex.ru/profile/137507524552 вы сможете найти всю исчерпывающую информацию, касающуюся свадебного агентства Kasla Wedding. Оно на профессиональном уровне занимается организацией масштабных торжеств. При этом продумывает все до мелочей, чтобы торжество прошло именно так, как нужно. Здесь вы найдете информацию про то, где находится это агентство. Есть фото и видео материалы, телефон для связи и другая дополнительная и нужная информация, которая поможет найти агентство.
genadtug · June 9, 2023 at 11:46 pm
На сайте https://allparts-don.ru/ вы сможете подобрать автозапчасти, аксессуары, а также горюче смазочные жидкости. Весь ассортимент разделен на категории, чтобы вы максимально оперативно подобрали для себя подходящий вариант. Для того чтобы найти подходящую деталь, необходимо воспользоваться специальным поиском, куда вводят код запчасти, а также VIN номер автомобиля. Есть раздел с наиболее популярными товарами, которые пользуются спросом у большинства. Перед тем, как сделать заказ, сначала необходимо ознакомиться с режимом работы.
psihiatr_rof · June 9, 2023 at 11:47 pm
платный психиатр на дом https://psihiatr-na-dom.ru/
leonintub · June 10, 2023 at 12:23 am
На сайте https://vitaminium.shop/ вы сможете приобрести эффективные и качественные минеральные комплексы, витаминные добавки и многое другое от популярных брендов, которые создают высококачественную и полностью безопасную продукцию. Важным достоинством портала является то, что прием заказов осуществляется 24/7. Вот почему оформить заказы вы сможете даже поздним вечером. Вся продукция является качественной, на нее есть гарантии. В интернет-магазине все платежи полностью безопасные, а потому данные карты не попадут третьим лицам.
abininPem · June 10, 2023 at 4:14 am
Портал https://stopkor.info/ представляет собой уникальный сайт, посвященный расследованиям коррупционных действий. Здесь находятся самые любопытные, актуальные материалы, громкие разоблачения, которые будет интересно почитать всем, кто в теме. Ежедневно появляются новые интересные сведения, которые прольют свет на многочисленные вопросы. А самое главное, что все дела действительно раскрыты, а коррупционеры находятся под следствием. Регулярно здесь выкладываются фото и видеоматериалы.
tarostdew · June 10, 2023 at 4:53 am
На сайте https://ooogsz.ru вы сможете заказать такие услуги, как: восстановление домов, построек, снос объекта капитального строительства, строительство фундамента и другие. Компания берется за выполнение как маленьких, так и больших проектов, независимо от сложности. Каждому из них уделяется огромное количество внимания, чтобы результат был именно таким, на который вы рассчитывали. При этом расценки остаются на среднем уровне. Вы сможете рассчитывать на получение бесплатной консультации, если введете свои данные в специальную форму.
yevgeBaiva · June 10, 2023 at 5:41 am
На сайте https://detectivexpert.ru/ воспользуйтесь услугами детективного агентства «Возможно Все», где работают лучшие эксперты. Они проведут работы на профессиональном уровне, предоставят услуги, касающиеся скрытого видеонаблюдения, сбора досье, выявления измены. Если перед вами стоит цель найти близкого человека, то и с этой задачей отлично справятся специалисты агентства. Это доступно благодаря огромному опыту и профессионализму сотрудников. Для того чтобы воспользоваться услугой, необходимо позвонить по телефону.
Davidcrelt · June 10, 2023 at 7:51 am
https://baccara.games/gde-igrat-v-baccara/pin-up/
Robertmaymn · June 10, 2023 at 8:37 am
https://bolshoyvoprosik.ru/viewtopic.php?id=14411
tarasoRex · June 10, 2023 at 9:11 am
На сайте https://lugaland.com/board/ представлены объявления Луганска. Здесь вы сможете приобрести либо продать, сдать в аренду любую недвижимость, транспорт, воспользоваться услугами, а также приобрести предметы мебели, модную одежду, стильные аксессуары, обувь. На сайте можно продать либо приобрести по доступной цене товары для дома. Присмотрите животное, о котором вы давно мечтали. Есть и полезная рубрика, где вы сможете взять в дар вещи либо отдать то, что не нужно.
Robertmaymn · June 10, 2023 at 9:39 am
http://soc-life.com/forum/7-17835-1
mininnougs · June 10, 2023 at 9:53 am
На сайте https://theserials.online/ имеются интересные, увлекательные сериалы различного жанра. Все фильмы в отличном качестве и с хорошим звуком. А самое главное, что варианты представлены в огромном многообразии, что позволит выбрать решение на любой вкус. Просматривать сериалы можно на любом устройстве, в том числе, на компьютере, мобильном телефоне и где бы вы ни находились. Найдите такой сериал, который соответствует вашим предпочтениям. Есть фильмы прошлых лет, а также новинки, которые точно понравятся каждому киноману.
Robertmaymn · June 10, 2023 at 10:40 am
http://www.pets-ural.ru/content/forum//viewtopic.php?t=16816
ornilovcrift · June 10, 2023 at 11:13 am
На сайте https://www.pcuxolog.ru вы сможете воспользоваться такой услугой, как консультация психолога в режиме онлайн. Очень часто подобная форма общения становится настоящим спасением для людей, у которых психологическая травма. Онлайн-консультация дарит уникальную возможность получить профессиональную помощь, справиться с различными проблемами, найти решение ситуации. При этом консультация обойдется недорого. Онлайн-консультация отличается огромным количеством преимуществ, а самое главное, что получится справиться с переживаниями.
Robertmaymn · June 10, 2023 at 11:42 am
http://rak.flyboard.ru/topic17374.html
vityaUteks · June 10, 2023 at 1:57 pm
На сайте https://utmmetki.ru/ воспользуйтесь удобным и функциональным сервисом – генератором UTM-меток. Для этого необходимо лишь ввести в поисковую строку адрес ссылки, а затем выбрать источник трафика. Пользоваться этим сервисом очень просто. Оцените все его преимущества и функции. И самое главное, что сориентироваться в опциях сможет даже тот, кто решил воспользоваться софтом впервые. Сайт отличается интуитивно понятным интерфейсом. Воспользуйтесь и вы сервисом, который будет полезен.
savitsRap · June 10, 2023 at 2:04 pm
На сайте https://glavcom.info/ вы сможете изучить самые последние, актуальные новости Украины. Вы найдете интересные, любопытные статьи на самую разную тематику, включая политику, экономику, культуру, происшествия. На портале огромное количество рекомендаций, мнения первых лиц, которые высказываются так, чтобы это было понятно простому народу. И самое главное, что все новости экспертные, составлены профессионалами и только для вас. Заходите на портал для того, чтобы ежедневно получать новую порцию свежих данных.
Rubenempixelm · June 10, 2023 at 3:17 pm
from this source
ulgakskign · June 10, 2023 at 6:39 pm
На сайте https://limo61.ru вы сможете взять в аренду лимузин на любое торжество или на свидание. Автомобиль находится в технически исправном состоянии, отличается повышенной проходимостью и действительно производит эффект не только своим внешним видом, но и габаритами. Стоимость аренды зависит от маршрута, а также того, на какое расстояние будет следовать автомобиль. За рулем будет находиться опытный, вежливый и обученный водитель, который будет возить по указанному маршруту. Автомобили соответствуют требованиям безопасности.
olechktat · June 10, 2023 at 8:07 pm
На сайте http://mcleda.ru/ вы сможете ознакомиться с телефоном медицинского центра «ЛеДа – лечение давлением». Для того чтобы воспользоваться услугой, необходимо предварительно записаться, а вопросы задать через электронную почту. Запишитесь на новую, запатентованную услугу, которая быстро принесет эффект. Подобный метод терапии помогает нормализовать давление, восстановить микроциркуляцию мозга, а также почечный кровоток. Этот метод отличается отсутствием противопоказаний. Запишитесь и вы на процедуру, которая проходит в барокамере и при помощи давления воздуха.
evgenitew · June 10, 2023 at 9:02 pm
На сайте https://sdotest.me воспользуйтесь профессиональной и качественной помощью, которая оказывается в решении онлайн-тестов, написании дипломных работ, курсовых, отчетов для тех, кто обучается в институте Синергии. Компания отличается колоссальным опытом работы – более 7 лет решает тесты, тем самым помогая ученикам получить высший балл. Действует фиксированная стоимость при сдаче теста. Никто не узнает о том, что вам была оказана поддержка по учебе. Прямо сейчас вы сможете оформить заявку, чтобы воспользоваться помощью.
Narkolog_emaic · June 10, 2023 at 9:42 pm
вывод из запоя на дому клиника https://vivod-iz-zapoev.ru/
buy loperamide 2mg · June 11, 2023 at 1:43 am
ddavp without a doctor prescription ddavp generic cheapest ddavp
Wilsongroxy · June 11, 2023 at 5:04 am
https://laserdoctor.ru/
luckyjet_tuh · June 11, 2023 at 6:20 pm
https://luckyjet.casino/skachat-lucky-jet/
genadOptox · June 12, 2023 at 4:31 am
На сайте https://kinogo-fil.net/ вы сможете посмотреть фильмы в отличном качестве и в высоком разрешении. Огромный выбор вариантов, которые идеально подходят для просмотра после работы либо в выходной день. Вас обрадует качественная озвучка, а также многоголосый перевод. Для того чтобы найти тот вариант, который больше всего нравится, воспользуйтесь специальным фильтром, который отсортирует фильмы по году выпуска, актерскому составу и другим моментам. Регулярно добавляются новинки, с которыми нужно ознакомиться каждому киноману.
artemlGague · June 12, 2023 at 4:50 am
На сайте https://art-sex.ru/ вы сможете ознакомиться с изысканными работами великих, популярных авторов, которые пишут картины в эротическом стиле. Перед вами огромное количество картин, которые заслуживают вашего внимания. Все они отличаются интересным и непредсказуемым сюжетом, а потому точно понравятся каждому. Почитайте информацию на тему психологии, есть перечень книг. А чтобы ознакомиться с творчеством поближе, почитайте информацию о сайте. Напротив каждой картины имеется ее описание, имя автора.
mrriptMoomy · June 12, 2023 at 5:16 am
Сайт https://2417.pro представляет собой портал с бесплатными объявлениями. Так вы сможете найти предложения на самую разную тему, включая транспорт, недвижимость, бизнес, работу, электронику, услуги, детский мир, моду и стиль. Вы сможете сами подать объявление, если необходимо что-то продать. Если в доме или гараже хранится ненужная вещь, то можно ее продать, ведь, возможно, она кому-то пригодится. Есть премиум объявления, а также срочные, когда товар необходимо продать оперативно. Среди всех вариантов вы обязательно найдете тот, который вам нужен.
TravisCLISK · June 12, 2023 at 5:46 am
работа в интернете
TravisCLISK · June 12, 2023 at 6:42 am
фото блогеров
speedandcash_emaic · June 12, 2023 at 7:15 am
https://speedandcash.casino/
TravisCLISK · June 12, 2023 at 7:37 am
как стать блоггером
Juhodup · June 12, 2023 at 8:59 am
Koe ainutlaatuinen [url=https://nikotiinipussi.art/]Nikotiinipussi[/url] kokemus laajan premium-valikoimamme avulla! Tutustu erilaisiin makuja ja nauti huomaamattomasta tavasta nauttia nikotiinia missa tahansa.
morguBar · June 12, 2023 at 3:12 pm
На сайте https://kinogoby.zone/ представлено огромное количество интересных фильмов с непредсказуемым и незаурядным сюжетом. Они сняты высококлассными режиссерами, которые отлично понимают в своей работе и предлагают зрителям отличный контент. Все фильмы в отличном качестве, они интересные, яркие и непредсказуемые. Среди огромного выбора вы обязательно найдете вариант для себя. Воспользуйтесь фильтром, который подберет оптимальное для вас решение. За вечер вы сможете просмотреть несколько кино, чтобы разнообразить досуг.
TravisCLISK · June 12, 2023 at 7:24 pm
работа в интернете
boryaRab · June 12, 2023 at 7:51 pm
The site https://365sms.org/en is an automated service for receiving SMS to a virtual number for subsequent activation in various services. Rental of disposable numbers in more than 100 countries is available to everyone.
arkknDuh · June 12, 2023 at 11:13 pm
На сайте https://best-vendor.ru/ вы сможете приобрести производственные материалы, а также высокотехнологичное оборудование, которое пригодится для различных нужд. Компания снизила цены еще. Специально для вас доступна оперативная доставка. В разделе вы сможете выбрать и заказать по телефону провода, кабели, стальной канат, смазки, масла, технические ткани и многое другое. Среди огромного ассортимента вы точно подберете то, что нужно. Главная задача компании заключается в том, чтобы повысить уровень безопасности россиян, избавиться от контрафакта.
EugeneGox · June 13, 2023 at 12:36 am
1 xbet
avelevBow · June 13, 2023 at 2:01 am
На сайте https://kinogo-la.net/ вы найдете самые интересные, увлекательные, модные фильмы, которые прогремели на всю страну в прошлом году. Также есть и интригующие новинки, выхода которых ожидали долгое время. На этом портале вы обязательно найдете вариант по душе для приятного просмотра вечером. Для того чтобы начать просмотр, не обязательно регистрироваться. Просто начните воспроизведение понравившегося фильма. Это абсолютно бесплатно. Вы можете посмотреть сразу несколько кино.
generatori_groxy · June 13, 2023 at 3:37 am
купить дизельный генератор https://generatori-dizelnie.ru/
myantdex · June 13, 2023 at 7:22 am
Современные, новые, мобильные и популярные онлайн казино с щедрыми бонусами на депозит и бездепозитные бонусы, представлены на нашем сайте детальных обзоров современных онлайн казино на ваш выбор https://anv.su/
логистический склад · June 13, 2023 at 9:10 am
Wonderful, what a website it is! This webpage provides useful information to us, keep it up.
LeonardPoill · June 13, 2023 at 10:42 am
https://income.forum2x2.ru/t3242-topic#5207
LeonardPoill · June 13, 2023 at 11:40 am
http://shoptema.ru/forum/topic/29590/
LeonardPoill · June 13, 2023 at 12:38 pm
http://bukmeker.bbok.ru/viewtopic.php?id=22413#p35801
CraigTed · June 13, 2023 at 12:43 pm
купить лист рифленый цена
leoniBes · June 13, 2023 at 12:50 pm
На сайте https://1080kino.net/ представлены интересные, многообещающие фильмы с непредсказуемым сюжетом и самого разного жанра: драмы, комедии, боевики, триллеры и многое другое. С самых первых минут сюжет затягивает, а потому хочется досмотреть фильм до конца. В кино играют лучшие актеры, которые знают, как понравиться зрителю. Регулярно на портале появляются интересные и головокружительные новинки, которые нужно посмотреть каждому и без регистрации. Просмотр абсолютно бесплатный.
LeonardPoill · June 13, 2023 at 1:42 pm
http://www.vocal.com.ua/node/58000
LeonardPoill · June 13, 2023 at 2:43 pm
http://wiki.ecusystems.ru/index.php/Ускорьте_свою_карьеру:_Получите_диплом_без_лишних_хлопот
JamesLub · June 13, 2023 at 3:11 pm
https://sbormoney.iboard.ws/viewtopic.php?id=2156#p5784
JamesLub · June 13, 2023 at 3:17 pm
http://airlady.forum24.ru/?1-10-0-00000877-000-0-0-1686294325
JamesLub · June 13, 2023 at 3:32 pm
http://jodellemania.ru/forum26.html
JamesLub · June 13, 2023 at 3:37 pm
http://www.sakhd.3nx.ru/viewtopic.php?p=1427#1427
LeonardPoill · June 13, 2023 at 3:44 pm
https://robotaforum.2bb.ru/viewtopic.php?id=9734#p30593
мебель по низким ценам · June 13, 2023 at 4:26 pm
Good post. I am facing a few of these issues as well..
LeonardPoill · June 13, 2023 at 4:46 pm
https://animalprotect.org/z0f76a1d14fd21a8fb5fd0d03e0fdc3d3cedae52f?wsidchk=14763951
LeonardPoill · June 13, 2023 at 5:47 pm
http://kvartal8b.getbb.ru/viewtopic.php?f=19&t=12483
JamesLub · June 13, 2023 at 6:25 pm
http://dev.czvl.org.ua/forums/5/-/topic-create
JamesLub · June 13, 2023 at 6:40 pm
http://sea.2bb.ru/viewtopic.php?id=966#p2892
LeonardPoill · June 13, 2023 at 6:48 pm
http://afterwar.rusff.me/viewtopic.php?id=238#p6264
ezhovmooms · June 13, 2023 at 6:52 pm
https://leksa-tokens.com/ – онлайн магазин для покупки аккаунтов с токенами Bongacams, Stripchat, Chaturbate. Простой, безопасный процесс. Конфиденциальность данных и надежные транзакции. Широкий выбор аккаунтов с токенами. Удовольствие от приватных шоу и поддержка моделей. Кроме того сайт предлагает широкий выбор аккаунтов с различным количеством токенов, позволяя выбрать оптимальный вариант в соответствии с личными предпочтениями и бюджетом.
JamesLub · June 13, 2023 at 8:01 pm
http://danceway74.ru/users/36
JamesLub · June 13, 2023 at 8:10 pm
http://little-witch.ru/viewtopic.php?f=44&t=4292
Miltoncealf · June 13, 2023 at 8:28 pm
https://club4x4.ru/forum/viewtopic.php?f=17&t=83417
Miltoncealf · June 13, 2023 at 8:33 pm
https://www.orderviewdocs.online/doku.php?id=повысьте_свою_квалификацию_купите_профессионально_выполненный_диплом
JamesLub · June 13, 2023 at 8:43 pm
http://aistenokshop.ru/admin/content/taxonomy/181
Miltoncealf · June 13, 2023 at 8:46 pm
https://gotartwork.com/Blog/high-on-experience-cannabis-friendly-travel-destinations-you-must-visit/170732/
Miltoncealf · June 13, 2023 at 8:52 pm
http://bonchancetour.ru/blogs/interest/1006.php#comments
Miltoncealf · June 13, 2023 at 11:16 pm
https://heroes.app/blogs/309953/Откройте-новые-возможности-приобретите-подлинный-диплом-онлайн
Miltoncealf · June 13, 2023 at 11:30 pm
https://game13.forum24.ru/?1-18-0-00000479-000-0-0-1686392527
stepaZep · June 13, 2023 at 11:42 pm
На сайте https://onlyfilm.net/ вы сможете посмотреть интересные, актуальные фильмы, которые точно понравятся вам своей интересной постановкой, непредсказуемым сюжетом, игрой актеров. В каждом фильме играет интересная музыка, выстроена непредсказуемая сюжетная линия, а потому очень сложно угадать, чем закончится фильм. Заходите на сайт постоянно, ведь здесь регулярно появляются новинки от именитых режиссеров. Есть как боевики, так и мелодрамы, драмы, захватывающие триллеры, которые понравятся всем любителям таинственного.
Miltoncealf · June 14, 2023 at 12:46 am
http://pirat.iboards.ru/viewtopic.php?f=20&t=8282
Miltoncealf · June 14, 2023 at 12:52 am
https://smlife.ru/viewtopic.php?id=4749#p14675
JamesLub · June 14, 2023 at 12:57 am
https://datasphere.ru/club/user/15/blog/
Miltoncealf · June 14, 2023 at 1:06 am
http://wiki.author-alarm.ru/index.php/Откройте_двери_к_успеху:_купите_качественный_диплом_прямо_сейчас!
JamesLub · June 14, 2023 at 1:21 am
http://nukecritic.com/wiki/index.php/Преодолейте_ограничения_образования:_Откройте_двери_с_помощью_Купленного_диплома!
JamesLub · June 14, 2023 at 3:27 am
https://antiozuevo.0bb.ru/viewtopic.php?id=3122#p20977
Miltoncealf · June 14, 2023 at 3:37 am
https://wiki.mgpu.ru/index.php/Повысьте_свою_престижность:_купите_признанный_диплом
JamesLub · June 14, 2023 at 3:38 am
http://art-gymnastics.ru/users/54
Miltoncealf · June 14, 2023 at 3:54 am
http://share.psiterror.ru/2023/06/11/otkroyte-novye-vozmozhnosti-priobretite-podlinnyy-diplom-onlayn.html
JamesLub · June 14, 2023 at 4:04 am
https://chesskomi.borda.ru/?1-1-0-00001647-000-0-0-1686294278
JamesLub · June 14, 2023 at 4:14 am
http://kolba.com.ua/index.php?topic=131991.new#new
flonase nasal spray pharmacy · June 14, 2023 at 4:38 am
divalproex prices how to purchase divalproex 250 mg divalproex united kingdom
Miltoncealf · June 14, 2023 at 5:38 am
http://bike.by/forum/viewtopic.php?f=84&t=20419
Miltoncealf · June 14, 2023 at 5:48 am
http://www.rockarchive.ru/forum/index.php?act=ST&f=20&t=15084
olovinjoure · June 14, 2023 at 6:08 am
http://thetradable.com/ is a financial website dedicated to delivering up-to-date news on trading, cryptocurrency, and stocks. With a team of journalists and analysts, we provide comprehensive coverage of breaking news and market trends. Our aim is to offer valuable insights and advice that empower investors to make well-informed decisions.
Miltoncealf · June 14, 2023 at 6:14 am
https://kefirniygrib.7bb.ru/viewtopic.php?id=8714#p20704
Miltoncealf · June 14, 2023 at 6:24 am
http://wiki.luckcatchers.ru/index.php/Получите_заслуженное_признание:_купите_подтвержденный_диплом
John#thompson[Johasuxeki,2,5] · June 14, 2023 at 8:43 am
Discover the excitement of the exquisite [url=https://killa-mini.bio/]Killa Mini Blueberry[/url] and explore its delightful range of flavors!
https://skupkamsk.site · June 14, 2023 at 7:59 pm
грамм золота на сдачу
FAKE UK DRIVERS LICENSE · June 15, 2023 at 4:50 am
This info is worth everyone’s attention. When can I find out more?
dawlich · June 15, 2023 at 5:10 am
lovely lilith viagra Keeps my nips small and tight while on deca usually puffy when I m not using prolactin support
valerMaila · June 15, 2023 at 9:47 am
На сайте ЯАВТО.рф вы сможете ознакомиться с лучшими автопарками, услугами которых получится воспользоваться прямо сейчас. Для того чтобы сделать правильный выбор, необходимо ознакомиться со всеми вариантами, а также количеством звездочек, которое означает то, насколько хороши услуги. На портале только проверенные компании с фотографиями, кратким описанием, которое заслуживает вашего внимания. Изучите все варианты прямо сейчас! Регулярно добавляются новые компании, у которых есть все шансы занять лидирующие позиции.
ilimonSnamb · June 15, 2023 at 10:04 am
На сайте https://rus-film.fun/ ознакомьтесь с новыми, а также полюбившимися русскими фильмами, сериалами, мультфильмами, которые обязательно вам понравятся своим интересным, непредсказуемым сюжетом, актерской игрой. Они сняты талантливыми режиссерами, которые учитывают предпочтения зрителей. Каждое кино в отличном качестве, с хорошим звуком, поэтому точно доставит удовольствие во время просмотра. Начните просматривать фильм в любое время, когда хочется получить больше приятных эмоций, позитива.
aumovimary · June 15, 2023 at 10:07 am
Агентство интернет маркетинга полного цикла https://adsme.pro/ от разработки сайта до продвижения и рекламы вашего бизнеса. AdsMe выведет ваш интернет-магазин на новый уровень продаж, создадим качественный сайт, настроим контекстную рекламу в google и яндекс, займемся seo продвижением, запустим таргетированную рекламу в социальных сетях. За такой комплекс маркетинговых услуг мы сделаем скидку позволит получать часто Лиды круглый год. Работаем по всему миру на русском и английском языке. Офисы в Москве, Минске, Вильнюсе. AdsMe -ваше digital agency.
ulakospene · June 15, 2023 at 10:16 am
На сайте https://dezgroup.ru/ вы сможете оформить заявку на то, чтобы вызвать специалиста для дезинсекции, дезинфекции, дератизации. Все услуги оказываются на профессиональном уровне и с использованием инновационных и уникальных технологий, проверенного оборудования, которое помогает избавиться от непрошенных гостей быстро, качественно, безопасно и в минимальные сроки. Компания оказывает полный спектр услуг, а потому вы сможете выбрать именно те, что вам необходимы сейчас. Очень часто компания устраивает акции, чтобы вы смогли воспользоваться услугами на выгодных условиях.
vgeniynax · June 15, 2023 at 11:21 am
Магазин мобильных телефонов https://g5.by/ в Минске. Быстрая доставка и большой выбор смартфонов по отличной цене. Только оригинальный модели мобильных с гарантией и сервисным центром. В нашем интернет-магазине вы найдете наушники, ноутбуки, планшеты, консоли, электросамокаты, умные чаты и другие гаджеты. G5 это современный салон бытовой техники в котором вы можете приобрести товары с доставкой по Минску, Беларуси, России.
payment processing sales jobs · June 15, 2023 at 12:26 pm
Hmm is anyone else having problems with the pictures
on this blog loading? I’m trying to determine if its a problem on my end or if
it’s the blog. Any feedback would be greatly appreciated.
RickNuh · June 15, 2023 at 1:58 pm
Многих людей цепляет следующая идея – https://guilhermearrais.com.br/contato/
DonaldNiz · June 15, 2023 at 3:26 pm
buy tadalafil
Dominicempixelm · June 15, 2023 at 4:53 pm
useful link
uvaroArend · June 15, 2023 at 5:51 pm
На сайте https://m-strop.by/ вы сможете заказать стропы самых разных видов, включая текстильные, грузовые, канатные, грузозахватные. В соответствующем разделе вы сможете ознакомиться со всем каталогом продукции. Собственное производство, а также высокотехнологичное оборудование, инновационные технологии позволяют создавать продукцию высокого качества. Вся она хранится в нужном количестве на складе. Логистами организуется оперативная доставка в любой город. Для оптовых покупателей действуют скидки.
ychikDrait · June 15, 2023 at 6:02 pm
На сайте https://bettersex.ru/ вы сможете получить всю нужную информацию, ответы на вопросы про отношения, секс. Так вы узнаете о том, где можно найти девушку, как не нужно вести себя на первом свидании, можно ли заниматься сексом, если болеете. Имеется материал, который касается виртуального секса, про тактику сексуального поведения, любовь. Есть и секреты хорошего секса. На портале только актуальная и важная информация, которая несет в себе пользу. Есть такая рубрика, где статьи только для мужчин. Почитайте ответы и вопросы.
buehntes · June 15, 2023 at 6:59 pm
На сайте https://3new.ru/sobludenie-pdd-glavnoe-uslovie-bezopasnosti-na-doroge ознакомьтесь с полезными лайфхаками, которые посвящены всему, что сделает вашу жизнь проще, легче и интересней. Полезные и нужные рекомендации составлены теми, кто сам сталкивался с данной темой, а теперь решает поделиться наблюдениями с другими. Так вы узнаете о том, как начать пользоваться банковской картой бесплатно, каким образом получится выполнить рассылку в Вайбере абсолютно бесплатно. Имеются рекомендации о том, как сделать интернет в домашних условиях.
romanfat · June 15, 2023 at 8:05 pm
На сайте https://flowersspb.com/ вы сможете заказать профессиональное оформление комнаты цветами. Компетентные сотрудники по вашему желанию украсят любое торжество, офис, витрину. Также они украсят свадьбу, машину, торжество. Доступно корпоративное обслуживание. Если хотите сделать приятное своей девушке, то украсьте ее комнату изысканными свежими композициями. Вы обязательно подберете вариант под свой бюджет. И самое важное, что все композиции свежие, красивые и нежные. Вы в обязательном порядке подберете решение, исходя из предпочтений, финансовых возможностей.
ryushkhisee · June 15, 2023 at 8:50 pm
Our team will https://receptionevent.com/ organize and hold an event of any format and scale. We will develop a unique concept and plot regardless of the number of guests and geographical location. Every client is important to us, so we guarantee a first-class level of organization and confidentiality.
ocharClody · June 15, 2023 at 9:58 pm
На сайте https://play.google.com/store/apps/details?id=com.m4tches.l1ve.app вы сможете сделать ставки на спорт на одной из самых старейших БК «Фонбет». В настоящий момент она занимает лидирующие позиции в РФ. Компания была основана в 1994 году и постоянно развивается. Она работает легально и на честных условиях. К ее важным преимуществам относят то, что для каждого новичка предусмотрены бонусы, есть программа лояльности, возможность сделать лайв ставки. Пополняют счет через официальный сайт банковской картой либо через электронные денежные платформы.
syushpatry · June 16, 2023 at 1:43 am
На сайте https://vvt-centr.ru/ закажите обратный звонок для того, чтобы воспользоваться услугами лицензирования в сфере военной техники, вооружения, авиационной техники, космической деятельности. Для того чтобы понять, как работает компания и особенности ее деятельности, ознакомьтесь с отзывами. В компании оказывается полный спектр услуг, связанных с лицензированием. Кроме того, предусмотрено содействие по внесению в реестр. Если есть вопросы, то воспользуйтесь помощью специалиста.
MauriceGriem · June 16, 2023 at 1:52 am
buy tadalafil
kosarCer · June 16, 2023 at 2:47 am
На сайте https://erokat.ru/ представлены интересные, любопытные статьи на тему отношений, мужчины и женщины. Есть интригующая информация на тему знакомств, о том, как произвести впечатление на понравившегося человека и что для этого нужно сделать. Имеются сведения на тему сексуальных отношений, пикантные материалы, которые точно никого не оставят равнодушным. Вы обязательно получите ответы на все интересующие вопросы, а потому сможете построить здоровые и приятные отношения с тем, кто вам давно нравится.
latysSnula · June 16, 2023 at 6:06 am
На сайте https://play.google.com/store/apps/details?id=com.Fli вы сможете сделать ставки на спорт в БК «Леон», которая отличается огромным опытом в данной сфере, бонусной программой, приветственным бонусом, а также высоким коэффициентом. Каждому желающему доступен шанс выкупа ставок, огромный выбор способов пополнения баланса. На регистрацию потребуется не более пары минут. Выигрыш выплачивается моментально, без задержек. Попытайте и вы свою удачу, сделав ставки на спорт. Возможно, именно вы сегодня выиграете крупную сумму денег.
renteNok · June 16, 2023 at 7:28 am
На сайте https://unzha-hotel.ru/ забронируйте номер в экологически чистой гостинице и в режиме онлайн. Для этого необходимо ввести свою фамилию, адрес электронной почты, телефон, обозначить дату выезда и заезда. Клиента ожидают комфортные, уютные номера, в каждом из которых приятный и стильный интерьер. Это ваша возможность насладиться загородным отдыхом по привлекательной стоимости. Для большой компании можно снять целый комфортный коттедж. На сайте ознакомьтесь с ценами, а также фотографиями, чтобы принять окончательное решение.
MauriceGriem · June 16, 2023 at 8:58 am
cialis 10 mg buy tadalafil tadalafil india
DavidBob · June 16, 2023 at 9:22 am
Experience the incredible wonders of [url=https://killa-mini.online/]Killa Mini Cold Mint[/url] as you delve into our exquisite range of flavors!
opylovexope · June 16, 2023 at 9:24 am
По ссылке https://play.google.com/store/apps/details?id=com.streamsofvolcano.chillgmzStudio вы сможете начать играть в казино «Вулкан» и получить от процесса не только приятные эмоции, но и заслуженные средства. Важным достоинством заведения является то, что оно работает на честных и прозрачных условиях, всегда выплачивает выигранную сумму. Перед вами только лицензированные автоматы, удобная система поощрений, а все платежи абсолютно безопасные. Функционал создан таким образом, чтобы игра была комфортной и удобной.
MauriceGriem · June 16, 2023 at 9:35 am
tadalafil coupons buy stromectol tadalafil 5 mg
hulyaFonna · June 16, 2023 at 9:42 am
На сайте https://kollegiya-advokaty.ru воспользуйтесь услугами, которые предоставляет коллегия адвокатов. Все проблемы будут решены оперативно, профессионально, недорого. В компании трудятся только лучшие, компетентные сотрудники, которые справятся с задачей любого уровня сложности. У всех адвокатов огромный опыт работы в самых разных сферах. Здесь вы сможете воспользоваться внушительным спектром услуг. Получите подробную правовую консультацию прямо сейчас. Адвокаты примут в любое, удобное для вас время.
MauriceGriem · June 16, 2023 at 10:03 am
cialis professional buy ivermectin tadalafil online
MauriceGriem · June 16, 2023 at 10:31 am
cheap cialis propecia cialis 10 mg
John#thompson[Ifyxujezohajexeb,2,5] · June 16, 2023 at 10:55 am
Experience the unparalleled joy of [url=https://killa-mini.art/]Killa Dry Frosted Mint[/url] and savor our exquisite range of flavors!
MauriceGriem · June 16, 2023 at 10:56 am
tadalafil 5 mg brand cialis cialis professional
MauriceGriem · June 16, 2023 at 11:33 am
tadalafil 20 mg viagra best price cialis
usanofug · June 16, 2023 at 11:48 am
На сайте https://krasvopishu.ru/ вы сможете воспользоваться прописями, различными упражнениями, которые используются для формирования хорошего и красивого почерка. Также можно скачать каллиграфические, математические прописи, различные задания по русскому языку. Имеются и прописи, которые помогут подготовиться к школе. Практика с прописями позволит детям запомнить последовательность букв, научиться красиво писать. Прописи потребуются и для того, чтобы закрепить тот опыт, который ребята получили на уроках.
MauriceGriem · June 16, 2023 at 11:59 am
tadalafil price stromectol tadalafil online
MauriceGriem · June 16, 2023 at 12:31 pm
cialis india brand cialis best price cialis
MauriceGriem · June 16, 2023 at 1:02 pm
tadalafil cost stromectol cialis canada
John#thompson[Ikojekocugysixuf,2,5] · June 16, 2023 at 1:15 pm
Discover the unparalleled delight of [url=https://killa-mini.fun/]Killa Mini Cold Mint[/url] and explore our exquisite range of flavors!
echayePoela · June 16, 2023 at 1:18 pm
На сайте https://zamok-ok.ru/vskrytie-avtomobilya/ закажите такую нужную услугу, как вскрытие автомобиля с участием компетентного, квалифицированного специалиста. У него с собой всегда весь необходимый инвентарь, высокотехнологичное оборудование, которое позволит провести все работы качественно, быстро и без повреждений, деформаций замка. В компании установлены привлекательные, честные расценки, а сами работы выполняются в короткие сроки и в круглосуточном режиме. Звоните и заказывайте услугу, которая может потребоваться в любой момент.
MauriceGriem · June 16, 2023 at 1:29 pm
cialis soft levitra cheap cialis
MauriceGriem · June 16, 2023 at 1:56 pm
tadalafil 10 mg buy tadalafil tadalafil 5 mg
MauriceGriem · June 16, 2023 at 2:23 pm
cialis coupons buy tadalafil cialis price
MauriceGriem · June 16, 2023 at 2:49 pm
buy cialis tadalafil 20mg cialis
MauriceGriem · June 16, 2023 at 3:18 pm
tadalafil usa tadalafil buy tadalafil
Markdup · June 16, 2023 at 3:45 pm
Indulge in the ultimate best [url=https://killa-mini.shop/]Killa Mini Cold Mint[/url] experience with our premium collection of flavors!
MauriceGriem · June 16, 2023 at 3:47 pm
tadalafil 10 mg buy tadalafil generic tadalafil
tepanEvact · June 16, 2023 at 4:04 pm
На сайте https://vip.probiv.in/ вы сможете воспользоваться такой нужной услугой, как пробив по линии МВД, НБКИ, ФНС, ПФР, осуществить оптимизацию налогов (НДС, Чеки). Здесь также имеются и перспективные, любопытные вакансии. К примеру, можно устроиться на работу в Связной, банк и другие учреждения. На сайте выполняют детализацию звонков, пробивают то, что другим не под силу. И самое главное, что все это строго конфиденциально, информация не передается третьим лицам. Данные пробиваются максимально быстро, надежно.
MauriceGriem · June 16, 2023 at 4:47 pm
20mg tadalafil buy buy tadalafil brand cialis
логистический склад · June 16, 2023 at 4:48 pm
Excellent blog here! Also your website loads up fast! What host are you using? Can I get your affiliate link to your host? I wish my site loaded up as fast as yours lol
MauriceGriem · June 16, 2023 at 5:24 pm
tadalafil canada canadian pharmaceuticals online cialis professional
lukinbrito · June 16, 2023 at 5:50 pm
На сайте https://flowersspb.com/ воспользуйтесь услугами цветочной мастерской, в которой работают компетентные и талантливые флористы. Они на профессиональном уровне и искусно украсят помещение, любой праздник изысканными цветами, оформят интерьер комнаты либо офиса. Если вы хотите сделать предложение своей девушке или просто оригинально ее поздравить с Днем рождения, то обязательно обратитесь за услугой в эту компанию. Вашему вниманию только свежие и ароматные композиции.
MauriceGriem · June 16, 2023 at 5:52 pm
cialis 20 mg cialis cialis cost
shvetslucky · June 16, 2023 at 6:09 pm
На сайте http://xn—-9sbi2argdu0fb4b.xn--p1ai/ приобретите натуральные, ароматные прикормки, зерновые насадки и смеси с самыми известными вкусами. В составе находятся исключительно качественные и отборные компоненты – перловая, пшенная крупа, зерна кукурузы, подсолнечный жмых. Также технологи добавляют и усилители вкуса, натуральные ароматизаторы, которые так нравятся рыбе. Все это считается натуральным возбудителем рыбы, которая быстро реагирует на прикормку. Для всех оптовых клиентов действуют особые условия работы, предоставляются скидки.
MauriceGriem · June 16, 2023 at 7:14 pm
cialis price cialis tadalafil price
Jarrodmob · June 16, 2023 at 8:12 pm
https://www.import-moto.com/users/88
eshkogok · June 16, 2023 at 8:44 pm
На сайте https://xn—-7sbbhkdclf9elz3j.online/ вы сможете проверить запрет на выезд за границу в режиме онлайн. К важным преимуществам обращения к сервису относят то, что здесь действуют оптимальные цены, он работает 24/7. Среди самых популярных причин, по которым россиянам запрещают выехать за границу, относят: неуплата долгов, совершено противоправное действие, санкции других стран, срочная служба и другое. Если и вы решили посетить другую страну, то убедитесь в том, что у вас нет долгов, воспользовавшись ботом.
ermiloNok · June 16, 2023 at 8:56 pm
На сайте https://avanchange.com/ вы сможете обменять валюту в ближайшее время и на выгодных условиях. Дополнительно получится приобрести такую криптовалюту, как Эфириум, Биткоин и другие. При необходимости можно выполнить обмен электронных денег. А постоянные клиенты получают возможность воспользоваться удобной скидочной системой, программой лояльности. Важным моментом является то, что на сервисе не хранятся личные данные, а потому они точно не попадут третьим лицам. Кроме того, применяется специальный сертификат для повышенной безопасности.
Jarrodmob · June 16, 2023 at 9:39 pm
http://forum.belmama.ru/index.php?topic=43132.0
MauriceGriem · June 16, 2023 at 9:52 pm
tadalafil 20mg tadalafil tadalafil 20 mg
olezhkKnose · June 16, 2023 at 11:01 pm
На сайте https://politeka.org/ представлены новости Украины, которые будут интересны не только местному населению, но и жителям других городов. Имеется информация о СВО, о наступлении войск и о том, что ожидает народ в будущем. Статьи представлены на самую разную тему, включая экономику, политику, культуру. Регулярно появляются свежие данные, комментарии экспертов, политиков относительно обстановки в этой стране. Вся информация находится в свободном доступе, а потому воспользоваться ей можно в любой момент. Заходите сюда регулярно для того, чтобы узнать то, что интересует вас.
Jarrodmob · June 16, 2023 at 11:06 pm
https://antiozuevo.0bb.ru/viewtopic.php?id=3140#p21003
MauriceGriem · June 16, 2023 at 11:30 pm
tadalafil cialis price tadalafil canada
MauriceGriem · June 16, 2023 at 11:57 pm
tadalafil buy tadalafil 20mg tadalafil buy
MauriceGriem · June 17, 2023 at 12:22 am
cialis for sale tadalafil 20 mg cheap cialis
Jarrodmob · June 17, 2023 at 12:32 am
https://zarabotok.forumrpg.ru/viewtopic.php?id=67413#p147087
MauriceGriem · June 17, 2023 at 12:47 am
20mg tadalafil buy 20mg cialis buy tadalafil price
MauriceGriem · June 17, 2023 at 1:13 am
tadalafil 10 mg tadalafil 5 mg cialis
MauriceGriem · June 17, 2023 at 1:38 am
cheap cialis cialis 20mg cialis canada
stepaBub · June 17, 2023 at 1:56 am
На сайте https://play.google.com/store/apps/details?id=com.streamsofvolcano.chillgmzStudio вы сможете сыграть в казино Вулкан, которое давно заполучило признание гемблеров. Перед вами огромное количество слотов, различных развлечений, которые понравятся всем без исключения. И самое важное, что выплаты происходят на регулярной основе, казино работает честно, прозрачно, а потому у пользователей нет нареканий. Каждый день сайт посещают несколько сотен пользователей из разных городов. Заходите на портал и вы, чтобы получить свою порцию приятных эмоций.
Jarrodmob · June 17, 2023 at 2:00 am
https://www.4yo.us/blogs/51662/Достижение-профессионального-роста-Купить-диплом-онлайн-сегодня
MauriceGriem · June 17, 2023 at 2:05 am
buy tadalafil tadalafil 20mg brand cialis
stepanof · June 17, 2023 at 2:09 am
At https://totalcost.io/ you can find information about the cost of ownership of various equipment and household appliances, which includes the cost of acquisition, taxes, available discounts and cost of ownership. We provide information to better understand how much different resources their device consumes and information about current prices and discounts in various stores.
MauriceGriem · June 17, 2023 at 2:34 am
20mg tadalafil buy cialis 5 mg cialis 5 mg
MauriceGriem · June 17, 2023 at 3:02 am
best price tadalafil cialis online cialis price
Jarrodmob · June 17, 2023 at 3:26 am
http://e-regata.com/eng/forum/?PAGE_NAME=message&FID=5&TID=22970&MID=37283&result=new#message37283
MauriceGriem · June 17, 2023 at 3:29 am
cialis coupons cialis for sale tadalafil coupons
MauriceGriem · June 17, 2023 at 3:54 am
tadalafil canada cialis india tadalafil coupons
บาคาร่า ออนไลน์ · June 17, 2023 at 3:57 am
Hello! This post couldn’t be written any better!
Reading through this post reminds me of my old room mate!
He always kept talking about this. I will forward this page
to him. Fairly certain he will have a good read.
Thank you for sharing!
MauriceGriem · June 17, 2023 at 4:20 am
tadalafil price cialis 10 mg 20mg cialis buy
MauriceGriem · June 17, 2023 at 4:46 am
tadalafil generic tadalafil cheap cialis
korneKig · June 17, 2023 at 4:50 am
На сайте https://dinavto.ru/ вы сможете ознакомиться с каталогом грузовых, легковых автозапчастей. Перед вами огромный выбор вариантов по самым доступным ценам. На сайте вы сможете ознакомиться со всеми моделями автомобилей, на которые закажите детали прямо сейчас. Имеются варианты на самые разные иномарки. Полный список изучите на сайте. Можно воспользоваться поиском по артикулу, наименованию, VIN-номеру. Загляните в справочник автотоваров, где имеются лампы, аксессуары, автохимия, масла, колпаки, аккумуляторы и многое другое.
Jarrodmob · June 17, 2023 at 4:53 am
http://www.traveltravelforum.com/showthread.php/13368-Индивидуальный-подход-к-образованию-Куп?p=44827#post44827
MauriceGriem · June 17, 2023 at 5:12 am
tadalafil for sale tadalafil 20mg cialis india
oryacclutt · June 17, 2023 at 5:36 am
На сайте https://ktozvonilrf.ru/ вы сможете узнать, кто вам звонил, и прямо сейчас. Этот портал предлагает воспользоваться умным поиском, определением номеров. Имеются отзывы тех, кто воспользовался этим сервисом. К важным особенностям сайта относят то, что он подскажет то, от кого было направлено смс-сообщение, поможет отыскать, чей это номер. Для того чтобы его пробить, необходимо вбить цифры в специальную строку. Определяйте код, регион звонящего. Ознакомьтесь с последними отзывами о звонках.
remont_emaic · June 17, 2023 at 5:39 am
ремонт фольксваген москва
MauriceGriem · June 17, 2023 at 5:40 am
tadalafil 20mg tadalafil cost cheap cialis
MauriceGriem · June 17, 2023 at 6:08 am
cialis for sale 20mg cialis buy tadalafil india
Jarrodmob · June 17, 2023 at 6:20 am
https://woman.build2.ru/viewtopic.php?id=9637#p33716
MauriceGriem · June 17, 2023 at 6:35 am
tadalafil coupons tadalafil usa tadalafil price
MauriceGriem · June 17, 2023 at 7:02 am
tadalafil 20mg tadalafil 5 mg cialis 20mg
MauriceGriem · June 17, 2023 at 7:28 am
cialis 20 mg tadalafil tadalafil usa
Jarrodmob · June 17, 2023 at 7:49 am
https://glonet.com/blog/3966/улучшите-свои-карьерные-перспективы-купить-диплом-от-аккредитованных-источн/
MauriceGriem · June 17, 2023 at 7:54 am
tadalafil price cialis coupons tadalafil for sale
RickNuh · June 17, 2023 at 7:55 am
Если у нас вызывает чудовищное беспокойство момент: https://hentaku.com/top-10-anime-that-will-make-you-cry/
MauriceGriem · June 17, 2023 at 8:19 am
cialis canada tadalafil for sale brand cialis
xoilac tv phim sẽ top1 · June 17, 2023 at 8:23 am
What a material of un-ambiguity and preserveness of precious familiarity about unpredicted emotions.
ebotachisy · June 17, 2023 at 8:30 am
На сайте https://volshebnaya-kraska.ru вы сможете воспользоваться более чем 300 раскрасок самых разных категорий. Здесь имеются раскраски на различный вкус и с любым сюжетом, включая животных, растения, мультфильмы. Этот сайт позволит развлечь вашего малыша, развить мелкую моторику рук и кругозор. Кроме того, удастся создать привлекательный декор в любое помещение, красивую поделку своими руками. На портале имеются шаблоны, трафареты, раскраски цифры, фрукты, транспорт.
leoniHasia · June 17, 2023 at 8:41 am
На сайте https://maldiveswomentour.ru/ посмотрите, когда ближайший тур на Мальдивы, чтобы отправиться туда дружной женской компанией. Вас ожидают удивительные растения, красивые пейзажи, вкусные блюда, закаты и рассветы, зажигательные танцы, йога, фотосессии и огромное количество положительных эмоций! Сейчас вы сможете заказать тур с огромной скидкой и на самых выгодных условиях. А еще вы найдете много новых друзей, единомышленников и тех, с кем можно приятно провести время в компании.
MauriceGriem · June 17, 2023 at 8:45 am
cialis cost cialis 20mg cialis buy
MauriceGriem · June 17, 2023 at 9:13 am
cialis price tadalafil canada cialis online
Jarrodmob · June 17, 2023 at 9:16 am
http://ciphertalks.com/viewtopic.php?f=14&t=1095407
MauriceGriem · June 17, 2023 at 9:41 am
generic tadalafil cialis 5 mg cialis for sale
nokhiOrach · June 17, 2023 at 9:51 am
На сайте https://play.google.com/store/apps/details?id=com.m4tches.l1ve.app вы сможете сделать ставки на спорт в БК «Фонбет». Для того чтобы начать работу, необходимо пройти регистрацию, на которую понадобится не более пары минут. Причем это можно сделать как с компьютера, так и мобильного телефона. Представлено несколько десятков видов спорта, включая индивидуальные и командные, зимние, летние. Если вы выиграете определенную сумму денег, то организаторы ее сразу же выплатят, ведь контора работает на прозрачных условиях и никогда не подводит.
MauriceGriem · June 17, 2023 at 10:09 am
buy tadalafil tadalafil price cialis soft
MauriceGriem · June 17, 2023 at 10:35 am
cialis cialis india 20mg cialis buy
MauriceGriem · June 17, 2023 at 11:01 am
cialis cost cialis usa tadalafil price
MauriceGriem · June 17, 2023 at 11:27 am
cialis usa tadalafil canada tadalafil cost
MauriceGriem · June 17, 2023 at 11:52 am
cialis price tadalafil 5 mg tadalafil online
uratovBrash · June 17, 2023 at 12:08 pm
На сайте https://uae-auto.ru/ вы сможете заказать подбор и доставку авто из ОАЭ и воспользоваться калькулятором таможенных платежей. Исключаем все риски и доставляем автомобиль под ключ от растаможки до постановки на учет.
MauriceGriem · June 17, 2023 at 12:18 pm
cialis price buy cialis tadalafil for sale
MauriceGriem · June 17, 2023 at 12:46 pm
cialis canada cialis online cialis canada
MauriceGriem · June 17, 2023 at 1:16 pm
tadalafil price cialis price cialis india
MauriceGriem · June 17, 2023 at 1:47 pm
20mg tadalafil buy cialis 20mg tadalafil price
MauriceGriem · June 17, 2023 at 2:14 pm
tadalafil 5 mg tadalafil 20mg cheap cialis
mochkDib · June 17, 2023 at 2:23 pm
На сайте https://paketprint.com/ вы сможете оформить заказ пакетов в типографии. Закажите любые виды пакетов, включая крафт пакеты, бумажные, полиэтиленовые, дизайнерские, а также упаковку. Все пакеты создаются из современных, качественных материалов, с применением уникальных красителей. Они не блекнут со временем и не теряют яркости. Выберете категорию подходящего ценового диапазона. Возможна оперативная печать. Закажите пакеты по выгодной стоимости и по акции. Сейчас на определенные группы товаров действует акция.
MauriceGriem · June 17, 2023 at 2:39 pm
tadalafil for sale best price tadalafil cheap cialis
MauriceGriem · June 17, 2023 at 3:05 pm
cialis 10 mg tadalafil india cialis usa
emyanutire · June 17, 2023 at 3:28 pm
На сайте https://zamok-ok.ru/vskrytie-avtomobilya/ воспользуйтесь такой важной услугой, как вскрытие автомобиля. Для вас действуют честные цены, а услугу выполняют квалифицированные и опытные специалисты, которые работают с различными видами замков, а потому для них нет сложных случаев. А самое важное, что вызвать мастера можно в любое время. Открытие автомобиля без повреждений, поломок. Всегда с собой новые замки в случае окончательной поломки старого. Мастер приедет на объект в течение получаса после оформления заявки.
MauriceGriem · June 17, 2023 at 3:31 pm
cialis professional cialis professional tadalafil usa
MauriceGriem · June 17, 2023 at 3:57 pm
brand cialis best price tadalafil best price tadalafil
MauriceGriem · June 17, 2023 at 4:24 pm
cialis usa tadalafil india tadalafil price
MauriceGriem · June 17, 2023 at 4:53 pm
cialis professional cialis 5 mg best price cialis
MauriceGriem · June 17, 2023 at 5:21 pm
cialis 20mg best price cialis tadalafil india
irogovbig · June 17, 2023 at 5:43 pm
На сайте https://play.google.com/store/apps/details?id=com.Fli вы сможете сделать ставки в БК «Леон» на самые разные виды спорта: бадминтон, американский футбол, бокс, бейсбол, гольф, гандбол, крикет, пляжный волейбол. При правильном подходе получится выиграть неплохие средства и делать это на регулярной основе. Для того чтобы зарегистрироваться, нужно будет лишь указать свой телефон, а также электронную почту. Это заведение является лицензированным, а потому ему точно можно доверять.
MauriceGriem · June 17, 2023 at 5:48 pm
best price tadalafil brand cialis cialis 20mg
fedyaErami · June 17, 2023 at 6:07 pm
На сайте https://hd.lord-films.tv/21164-ohota-film-2020-16 вы найдете самые популярные, а также редкие фильмы самых разных жанров: боевики, триллеры, драмы, исторические, которые понравятся даже истинным меломанам. Здесь имеются интригующие новинки, выхода которых ожидали уже давно. Все кино в отличном качестве, с хорошим звуком, что позволит насладиться просмотром на полную мощь. Для того чтобы отыскать нужный вариант, необходимо просто воспользоваться фильтром, который подберет то, что нужно.
MauriceGriem · June 17, 2023 at 6:13 pm
cialis online 20mg tadalafil buy cialis coupons
MauriceGriem · June 17, 2023 at 6:38 pm
cialis soft cialis 5 mg cialis usa
MauriceGriem · June 17, 2023 at 7:03 pm
cialis cost tadalafil online tadalafil
buy-backlinks.rozblog.com · June 17, 2023 at 7:14 pm
Hey there! I know this is kinda off topic nevertheless I’d figured I’d ask.
Would you be interested in trading links or maybe guest authoring a blog
article or vice-versa? My site addresses a lot of the same subjects as yours
and I think we could greatly benefit from each other. If you happen to be interested feel
free to send me an e-mail. I look forward to hearing from you!
Superb blog by the way!
My page: buy-backlinks.rozblog.com
www.bezogoroda.ru · June 17, 2023 at 7:22 pm
I believe what you postedwrotebelieve what you postedwrotesaidthink what you postedtypedsaidthink what you postedtypedWhat you postedwrote was very logicala ton of sense. But, what about this?consider this, what if you were to write a killer headlinetitle?content?wrote a catchier title? I ain’t saying your content isn’t good.ain’t saying your content isn’t gooddon’t want to tell you how to run your blog, but what if you added a titleheadlinetitle that grabbed people’s attention?maybe get a person’s attention?want more? I mean %BLOG_TITLE% is a little plain. You ought to look at Yahoo’s home page and see how they createwrite news headlines to get viewers interested. You might add a video or a pic or two to get readers interested about what you’ve written. Just my opinion, it could bring your postsblog a little livelier.
MauriceGriem · June 17, 2023 at 7:28 pm
cialis professional 20mg cialis buy 20mg tadalafil buy
yegonSWAWS · June 17, 2023 at 7:42 pm
На сайте https://arctica-thermos.ru/ вы сможете сыграть в казино Get-X, где представлены различные азартные игры, используя уникальную тактику и собственную выработанную стратегию. Здесь получится насладиться игрой на настоящие деньги, причем удача будет зависеть не от вашего везения, а логики. Казино известно тем, что выводит выигрыш всего в течение нескольких минут. Проект популярен среди любителей азартных игр. Они по достоинству оценили все преимущества виртуальной площадки. Вы сможете воспользоваться такими играми, как Минер и Краш.
MauriceGriem · June 17, 2023 at 7:55 pm
tadalafil 20mg 20mg tadalafil buy cialis coupons
MauriceGriem · June 17, 2023 at 8:22 pm
buy cialis buy tadalafil cialis
MauriceGriem · June 17, 2023 at 8:50 pm
cialis online tadalafil 10 mg cialis soft
redaksi.pens.ac.id · June 17, 2023 at 9:41 pm
This information is priceless. When can I find out more?
MauriceGriem · June 17, 2023 at 9:44 pm
cialis cost generic tadalafil cialis 10 mg
MauriceGriem · June 17, 2023 at 10:10 pm
cialis online brand cialis generic tadalafil
kozinVoith · June 17, 2023 at 10:11 pm
Официальный сайт глаз бога https://eyeofgod.in/ это источник информации и поиск людей по данным из открытых источников. Глаз бога – сервис, который предоставляет подробную информацию, а также имеет интерфейс для интеграции данных Search System с любой информационной системой или сервисом, как для физических так и юридических лиц.
FALATI · June 17, 2023 at 10:31 pm
This site was… how do you say it? Relevant!! Finally I have
found something which helped me. Thanks!
MauriceGriem · June 17, 2023 at 10:35 pm
cialis cost cialis professional 20mg cialis buy
MauriceGriem · June 17, 2023 at 11:00 pm
cialis cost cialis canada cialis soft
romocZek · June 17, 2023 at 11:10 pm
На сайте https://lift-teh.ru/ ознакомьтесь с телефоном либо оформите заявку для того, чтобы заказать цепные, канатные тали, компоненты крана, мостовые, консольные краны и многое другое. Весь товар является сертифицированным, качественным, на него действуют гарантии. Есть возможность воспользоваться всем комплексом услуг, включая монтаж. Всегда на складе хранятся запчасти в необходимом количестве. «КранШталь» считается ведущим поставщиком кранового оборудования. Предусмотрена своя сервисная служба и свое производство.
MauriceGriem · June 17, 2023 at 11:27 pm
tadalafil tadalafil online cialis online
MauriceGriem · June 17, 2023 at 11:54 pm
cialis best price cialis best price tadalafil
MauriceGriem · June 18, 2023 at 12:21 am
cialis 5 mg tadalafil india generic tadalafil
MauriceGriem · June 18, 2023 at 12:49 am
generic tadalafil tadalafil cost cheap cialis
MauriceGriem · June 18, 2023 at 1:15 am
tadalafil 10 mg cialis 5 mg cialis for sale
bolshBeeva · June 18, 2023 at 1:38 am
На сайте https://auto-arenda-anapa.ru/ воспользуйтесь такой услугой, как прокат автомобиля в Анапе. Не нужно вносить залог, отсутствуют ограничения. Чтобы проверить расценки, введите информацию, на какое время планируете взять авто. Компания располагает огромным автопарком иномарок, которым не более 3 лет. Они всегда ухоженные, чистые, регулярно проходят ТО. Это позволяет избежать непредвиденных ситуаций. Чем больше срок аренды, тем выгодней выходит услуга. При появлении вопросов обратитесь за рекомендацией к менеджеру.
MauriceGriem · June 18, 2023 at 1:41 am
tadalafil tadalafil tadalafil online
akeevjub · June 18, 2023 at 1:59 am
По ссылке https://vk.com/blagoustroystvo_chelyabinsk воспользуйтесь такой важной и нужной услугой, как благоустройство территории в Челябинске. В компании выполняют укладку тротуарной плитки, асфальтирование дорог, установку лежачих полицейских. Кроме того, можно заказать озеленение участка, засыпку щебня, ямочный ремонт, вывоз мусора. Все услуги выполняются с привлечением специализированной техники, силами компетентных работников, которые берутся и за сложные проекты.
MauriceGriem · June 18, 2023 at 2:08 am
cialis coupons tadalafil usa cialis
MauriceGriem · June 18, 2023 at 2:33 am
cialis canada cialis canada tadalafil canada
MauriceGriem · June 18, 2023 at 2:58 am
tadalafil 20 mg cialis price tadalafil usa
MauriceGriem · June 18, 2023 at 3:25 am
20mg cialis buy cialis coupons generic tadalafil
ilinsJab · June 18, 2023 at 3:32 am
На сайте https://www.lordfilm.monster/55249-dva-veronca-film-2018-25
вы сможете найти фильмы высокого качества и созданные популярными режиссерами. Здесь они представлены в огромном многообразии, а потому вы обязательно отыщите то, что улучшит настроение и произведет на вас эффект. Есть как драмы, так и мелодрамы, комедии, интригующие триллеры, детективы с неожиданным концом. Все фильмы в отличном качестве, а главное, что смотреть их можно без регистрации, в любое время и независимо от устройства, даже в дороге, в перерывах между работой или учебой.
MauriceGriem · June 18, 2023 at 3:52 am
cheap cialis cheap cialis tadalafil usa
MauriceGriem · June 18, 2023 at 4:19 am
buy cialis cialis usa cialis usa
vape_groxy · June 18, 2023 at 4:31 am
жижа для вейпа https://store-vape.ru/
MauriceGriem · June 18, 2023 at 4:45 am
tadalafil 20mg cialis 10 mg buy tadalafil
MauriceGriem · June 18, 2023 at 5:10 am
cialis soft tadalafil coupons cialis coupons
MauriceGriem · June 18, 2023 at 5:34 am
cialis canada cialis 5 mg generic tadalafil
MauriceGriem · June 18, 2023 at 5:59 am
tadalafil 10 mg brand cialis cialis canada
MauriceGriem · June 18, 2023 at 6:23 am
brand cialis cialis professional cialis coupons
Johntuh · June 18, 2023 at 6:36 am
Discover the incredible flavors of [url=https://killa-mini.xyz/]KILLA MINI COLD MINT[/url] and elevate your snus experience to new heights!
MauriceGriem · June 18, 2023 at 6:48 am
cialis 10 mg buy tadalafil cheap cialis
ovaletaw · June 18, 2023 at 7:10 am
На сайте https://mirena003.ru/ вы сможете оформить заявку на покупку спирали «Мирена». Она представляет собой надежную, безопасную защиту от нежелательного зачатия. Выступает в качестве профилактики миомы матки, эндометриоза. После извлечения женщине быстро возвращается способность к зачатию. Применяется в профилактических целях, терапии гинекологических недугов. Спираль не доставляет дискомфорта во время интимной близости. Спираль продается во всех городах России, можно осуществить установку.
MauriceGriem · June 18, 2023 at 7:38 am
cialis india cialis canada tadalafil 20mg
Juliansut · June 18, 2023 at 7:51 am
https://app.demanzo.com/domain/mining-kmv.ru
yarosCyday · June 18, 2023 at 8:00 am
На сайте https://xn——5cdadc0alzcb4al9ab6ac0bjq4i5g.xn--p1ai/ почитайте статьи Вассы Руно, которая является целителем-энергопрактиком, Кармологом, Родологом, Мастером Рейки. Ей 58 лет, родом из Москвы и в течение длительного времени ведет практики, которые помогают вылечить не только душу, но и тело. Также здесь вы сможете ознакомиться и с важными статьями, которые ответят на многие вопросы. Изучите все рубрики, представленные на сайте: красота и здоровье, исцеление, медитация, нетрадиционная медицина, психология и эзотерика.
geniySkymn · June 18, 2023 at 8:13 am
На сайте https://ostrov-nevest.ru/services вы сможете заказать: Свадебный кортеж в Ярославле, Иванове, Костроме, Владимире. Аренда красивых машин на свадьбу. Свадебные машины и транспорт на заказ. Доступные цены, широкий ассортимент, простой заказ.
JohnJiz · June 18, 2023 at 8:19 am
Experience the amazing world of [url=https://killa-mini.art/]killa mini[/url] and savor the finest selection of flavors!
Johnreubs · June 18, 2023 at 11:18 am
Experience the ultimate delight of [url=https://killa-mini.bio/]Killa Cold Mint[/url] with our exquisite range of flavors!
yaroslFex · June 18, 2023 at 12:38 pm
На сайте https://zavodso.ru вы сможете оформить заявку, чтобы воспользоваться такой важной услугой, как создание, реализация сварных ограждений от производителя. На выполнение задачи, независимо от уровня сложности и объема, уходит от 2 дней вместе с доставкой. Для сотрудничества в обязательном порядке заключается договор как с юридическими, так и физическими лицами. Работа без посредников, напрямую, что позволяет снизить конечную стоимость. Получите каталог продукции прямо сейчас.
omaroPek · June 18, 2023 at 1:07 pm
На сайте https://ru.lord-film.tv/70871-pol-t-goldman-serial-2023-20 находятся фильмы в отличном качестве и в огромном многообразии, что позволит подобрать вариант под свои предпочтения. Вы обязательно найдете фильм для просмотра после работы или в выходной день, что позволит разнообразить досуг и сделать его более ярким, запоминающимся. А самое главное, что все фильмы находятся в отличном качестве, с объемным звуком. Найдете как комедии, так и триллеры, драмы, историческое кино и многое другое. Подборка фильмов составлена с учетом предпочтений каждого зрителя.
Jamesdup · June 18, 2023 at 1:42 pm
Experience the icy wave of [url=https://killa-mini.live/]Killa Mini Cold Mint[/url] that invigorates your senses and provides an excellent nicotine experience. Get ready to elevate your day with the refreshing taste of mint!
Jamesdup · June 18, 2023 at 2:01 pm
Get whisked away to a tropical paradise with [url=https://killa-mini.live/]Killa Mini Banana Ice[/url]! Savor the delightful banana flavor complemented by a cooling sensation for a nicotine pouch experience that’s second to none.
Edwarddup · June 18, 2023 at 2:06 pm
Dive into the tropical ecstasy with [url=https://killa-mini.live/]Killa Mini Mango Ice[/url]! Let the exotic mango flavors swirl around your senses while the icy freshness takes over, delivering an unparalleled nicotine experience.
Williamdup · June 18, 2023 at 2:09 pm
Embark on a minty escapade with the sensational [url=https://killa-mini.live/]Killa Mini Frosted Mint[/url] pouches! Experience the invigorating blend of frosty mint and pure nicotine satisfaction that’s sure to freshen up your daily routine.
Samueldup · June 18, 2023 at 2:24 pm
Dive into the world of satisfaction with [url=https://killapods.eu]Nicotine Pods[/url]! A perfect blend of taste and nicotine strength that keeps you going. Don’t miss out on this amazing experience!
Williamdup · June 18, 2023 at 2:32 pm
Embark on a flavor adventure with [url=https://killa-mini.live/]Killa Mini Blueberry[/url]! Experience the deliciously rich blueberry taste coupled with the perfect nicotine kick, and find yourself lost in a berrylicious world.
haposjib · June 18, 2023 at 4:50 pm
На сайте https://doka-stroi.ru/ вы сможете оставить заявку на то, чтобы выполнить ремонт квартиры различной площади, воспользоваться дизайном интерьеров, ремонтом комнаты. Над каждым проектом работают высококлассные сотрудники с огромным опытом, профессиональным оборудованием. Имеется свой инвентарь, а также материально-техническая база. Каждый этап работы подвергается строгому контролю. На все услуги предоставляется гарантия в 3 года. Ознакомьтесь с выполненными работами.
dyushcox · June 18, 2023 at 6:12 pm
Portal infotainment https://nrp.news/ to źródło świeżych i ciekawych informacji o wydarzeniach w Polsce. Stale aktualizowane treści nie pozwolą Ci się nudzić i dają możliwość nauczenia się czegoś świeżego i nowego – czegoś, co nie jest dostępne na innych stronach.
ariontew · June 18, 2023 at 6:34 pm
На сайте https://kollegiya-advokaty.ru вы сможете воспользоваться услугами адвокатской конторы. В ней работают лучшие специалисты, которые отличаются огромным опытом, а потому берутся за решение самых сложных дел, для которых необходим особый подход. Все услуги оказываются по доступной стоимости и в минимальные сроки. Сотрудники работают на совесть, на прозрачных условиях, а потому сразу говорят, каким будет исход дела. Предлагается огромный спектр услуг в различных отраслях права.
ez keys auto sales · June 18, 2023 at 7:22 pm
Wow, fantastic blog structure! How lengthy have you been blogging for?
you make blogging glance easy. The total look of
your web site is excellent, let alone the content!
psihiatr_jef · June 18, 2023 at 8:00 pm
психиатр нарколог на дом https://psihiatr-na-dom.ru/
RafaelBreaG · June 18, 2023 at 9:14 pm
https://www.krialenergo.ru/includes/php/otkroyte_dlya_sebya_udivitelnue_miru__besplatnue_onlayn_fantasticheskie_filmu.html
oitskiyKeets · June 18, 2023 at 10:38 pm
На сайте https://wrap-msk.ru заполните заявку для того, чтобы заказать профессиональную защиту, качественный уход для автомобиля. Компания работает в сфере детейлинга автомобиля, начиная с 2005 года. В ней работают компетентные, лучшие специалисты, знакомые со всеми нюансами. Это позволит не тратить финансы, а заказать только те услуги, которые действительно необходимы. На все работы предоставляются гарантии от 2 лет, применяются исключительно сертифицированные качественные материалы.
shnikoAppaw · June 18, 2023 at 11:15 pm
На сайте https://vizakitay.ru закажите обратный звонок для того, чтобы специалист вам перезвонил и помог оформить визу в Китай. Здесь же находится большой выбор тарифов, среди которых вы обязательно подберете то, что вам необходимо и впишитесь в бюджет. Для того чтобы оформить визу, необходимо собрать полный пакет документов, затем вызвать курьера, а на завершающем этапе получить паспорт с визой в офисе компании. Воспользуйтесь спецпредложением, чтобы оформить бизнес визу в Поднебесную на год.
generator_jef · June 18, 2023 at 11:28 pm
дизельные генераторы краснодар https://generatori-dizelnie.ru/
Robertpof · June 19, 2023 at 12:32 am
https://gis-lab.info/forum/files/inc/?smotrite_besplatno_kachestvennue_boeviki_onlayn.html
Robertpof · June 19, 2023 at 3:48 am
https://www.kramatorsk.info/blogs/wp-pages/otkroyte_dlya_sebya_mir_istoricheskih_filmov.html
aksimorex · June 19, 2023 at 4:09 am
На сайте https://xn—2-6kcilfabiomi5alfgarscnqap2u.xn--p1ai/ вы сможете заказать внедрение корпоративного мессенджера в компанию, для возможности быстрого обмена сообщениями, файлами и документами внутри организации. Эффективная коммуникация между сотрудниками для успешного функционирования бизнеса – то, что можно заказать уже сегодня.
ilippoMag · June 19, 2023 at 5:57 am
На сайте https://izumrudprint.ru/ вы сможете оформить заявку для того, чтобы воспользоваться услугами типографии. Здесь вы сможете заказать печать журналов, книг, календарей, подарочных коробок. На высокотехнологичном и мощном оборудовании производятся любые виды печатной продукции. Специалисты специально для вас разработают концепцию и распечатают, чтобы вы получили необходимый результат. Установлены привлекательные и доступные цены на все виды услуг, они оказываются в минимальные сроки.
rshunJug · June 19, 2023 at 8:06 am
По ссылке https://vk.com/blagoustroystvo_chelyabinsk закажите такую важную услугу, как благоустройство территории. Компетентные и опытные сотрудники со всей ответственностью подойдут к асфальтированию дорог, тротуаров, различных территорий. Кроме того, здесь выполняется засыпка щебня, укладка плитки, установка бордюров, вывоз мусора и ямочный ремонт. Со всем списком ознакомьтесь в группе. Позвоните по обозначенному телефону для того, чтобы заказать услугу. Все работы выполняются с привлечением профессиональной, качественной техники, соответствующего инвентаря.
RickNuh · June 19, 2023 at 8:07 am
Большое количество женщин захватывает момент, об https://www.agronews.gr/programmata/200837/sta-188-ekat-anerhetai-i-dimosia-dapani-gia-epidotoumenes-ependuseis-stin-udatokalliergeia/
tricor 160mg uk · June 19, 2023 at 9:33 am
trazodone prices trazodone 50mg pills trazodone australia
mikhaiAnept · June 19, 2023 at 9:35 am
На сайте https://casino-top.kz/ вы сможете ознакомиться с лучшими онлайн-заведениями, которые идеально подходят для интересного времяпрепровождения и игры на деньги. Здесь вы найдете только надежные, честные заведения, которые отобраны командой профессионалов – они сами любят азартные развлечения. В каталоге присутствуют только лицензионные, лучшие площадки, которые достойны вашего внимания. При необходимости вы сможете почитать обзор, чтобы получить больше информации, а затем, определившись с выбором, начать играть.
anatolfum · June 19, 2023 at 9:57 am
На сайте https://macros-caliber.ru находятся макросы калибр. Только здесь полный набор макросов на наиболее актуальных форматах. Приобрести макросы вы сможете уже сейчас. Всего 17 подразделений, 51 оперативник, 115 макросов у каждого персонажа. Если и вы приобретете набор макросов, то сможете рассчитывать на различные преимущества. Кроме того, скрипты находятся в самых популярных форматах. Каждый из них проверяется на работоспособность, наличие ошибок, вирусы, что позволит вам смело приобрести все, что необходимо.
John#smith[Ihoqebuqeqoprywu,2,5] · June 19, 2023 at 10:00 am
Explore the extraordinary world of [url=https://killa-mini.bio/]Killa Mini Cold Mint[/url] and embrace the captivating essence of our innovative flavors!
vanyuEvisa · June 19, 2023 at 10:01 am
На сайте https://auto-arenda-anapa.ru/ вы сможете воспользоваться такой услугой, как прокат автомобилей в Анапе. При этом отсутствуют ограничения, не потребуется залог. Для того чтобы проверить цены, необходимо ввести дату и время начала, окончания поездки. Это позволит быстро определить стоимость услуги. Ознакомьтесь с автопарком и подберите автомобиль под свои предпочтения, материальное положение. Каждая иномарка чистая, ухоженная, исправно работает, а перед выездом в обязательном порядке проходит технический осмотр, чтобы вас не подвести.
yabovFaigo · June 19, 2023 at 10:05 am
На сайте https://zamenisteklo.com/ оставьте заявку для того, чтобы воспользоваться услугой по замене лобового стекла. Также можно произвести замену бокового либо заднего стекла машин любых марок и моделей. На все работы, материалы предоставляются гарантии 5 лет. Все услуги выполняются в соответствии с самыми высокими требованиями, быстро и по привлекательной цене. А потому воспользоваться ими сможет каждый желающий. Отсутствуют очереди, потому как вам нужно будет подъехать к определенному времени.
Robertdup · June 19, 2023 at 10:15 am
Indulge in the ultimate best [url=https://killa-mini.bio/]Killa Mini Frosted Mint[/url] experience with our premium collection of flavors!
vsyanViefs · June 19, 2023 at 10:17 am
На сайте https://waltzprof.com/ закажите профиль в огромном ассортименте и используемый в самых разных сферах. Все изделия создаются из качественного материала, на инновационном, высокотехнологичном оборудовании, которое производит товары, независимо от объема и в максимально сжатые сроки. Для того чтобы воспользоваться услугами, необходимо просто позвонить по обозначенному телефону либо оставить заявку на сайте. На портале перечислен весь ассортимент товаров, которые вы можете заказать прямо сейчас и по привлекательным ценам.
pechat_rhymn · June 19, 2023 at 11:38 am
печать на 3d принтере https://3d-pechat-zakaz.ru/
RafaelBreaG · June 19, 2023 at 1:37 pm
http://volgazdrav.ru/includes/pages/okunites_v_atmosferu_dikogo_zapada_s_nashey_kollekciey_vesternov__besplatnuy_onlayn_prosmotr_bez_ogr.html
MauriceGriem · June 19, 2023 at 3:14 pm
tadalafil for sale buy vermox cialis india
MauriceGriem · June 19, 2023 at 3:44 pm
cialis coupons buy stromectol cialis soft
MauriceGriem · June 19, 2023 at 4:19 pm
tadalafil 10 mg buy ventolin tadalafil 20 mg
MauriceGriem · June 19, 2023 at 4:55 pm
cialis 20 mg buy Bimatoprost cialis for sale
RafaelBreaG · June 19, 2023 at 4:56 pm
https://clinic.vsavm.by/wp-content/pgs/smotrite_voennue_filmu_onlayn_besplatno_na_nashem_sayte.html
web page · June 19, 2023 at 5:05 pm
“I did not know how I’d afford to keep in New York City or where my profession was going.”
My site – web page
Gama_Nuh · June 19, 2023 at 5:22 pm
Я уже несколько месяцев играю в Gama Casino и не могу нарадоваться. Это одно из лучших онлайн-казино, которые я пробовал! Регистрация на официальном сайте Gama Casino была моментальной, и они также предоставляют зеркало Gama Casino, чтобы можно было играть без проблем. У них впечатляющий выбор игр, включая классические слоты, видеопокер, рулетку и блэкджек. Бонусы и акции также делают игру еще интереснее. Присоединяйтесь и наслаждайтесь азартом!
rasimCycle · June 19, 2023 at 5:38 pm
На сайте https://arenda-invalidnyh-kolyasok.ru вы сможете оформить заявку для того, чтобы взять в аренду инвалидную коляску. Любая выбранная модель будет доставлена в ближайшее время – всего за пару часов. Инвалидная коляска предоставляется без залога. На сайте представлено огромное количество вариантов, которые вы сможете арендовать прямо сейчас. Каждая коляска проходит обработку после каждого клиента. Она отличается привлекательным видом, лаконичным дизайном. В обязательном порядке составляется договор аренды.
filipkaUtery · June 19, 2023 at 5:45 pm
Решили самостоятельно организовать отдых или путешествие? Сайт https://booking-ru.ru/ позволяет это с легкостью сделать. Забронировать отель, апартаменты, жилье очень легко. Выгодно купить авиабилет в любое направление можно за два клика. Заказать трансфер, купить страховку или экскурсию очень просто.
ntonofraro · June 19, 2023 at 5:50 pm
На сайте https://intelcheats.ru можно приобрести читы, которые необходимы для онлайн-игр. Здесь вы сможете заказать только проверенные, лучшие программы от надежных разработчиков. Компания располагает собственной технической поддержкой. Она моментально реагирует на запрос, помогает оперативно решить все возникшие проблемы, предоставляет профессиональные консультации. Компания гордится тем, что предлагает самые надежные, безопасные читы для игр. Они будут работать в течение всего времени подписки.
MauriceGriem · June 19, 2023 at 7:01 pm
tadalafil canada buy diltiazem tadalafil 20mg
Realistic Vaginas & Rahools Sex Toys · June 19, 2023 at 7:12 pm
Rahool plays with dildo. Buy cheap PorhHub premium
acoounts at – SmmStone.com
My web page … Realistic Vaginas & Rahools Sex Toys
MauriceGriem · June 19, 2023 at 7:45 pm
20mg cialis buy buy ciprofloxacin generic tadalafil
vetkoSwoda · June 19, 2023 at 7:57 pm
На сайте https://inguro.ru/ вы сможете найти оптимальное предложение для того, чтобы застраховаться на все случаи жизни. Можно оформить ОСАГО с огромной скидкой в 54%. На портале находятся исключительно проверенные, надежные компании, которые отличаются безупречной репутацией. Здесь вы сможете воспользоваться КАСКО, страховой ипотекой, туристической страховкой, страхованием квартиры, жизни. Всего оформлено более 15 000 ОСАГО и застраховано более 3 000 квартир. Для поиска нужного варианта необходимо вбить информацию в строку.
Robertpof · June 19, 2023 at 8:06 pm
https://kirmarket.ru/content/pages/index.php?smotrite_trilleru_onlayn_besplatno__naslazghdaytes_luchshimi_klassicheskimi_i_poslednimi_filmami.html
MauriceGriem · June 19, 2023 at 8:23 pm
tadalafil 20mg buy capoten tadalafil 10 mg
evgenieased · June 19, 2023 at 8:31 pm
On the site https://largetrend.online/ you can purchase natural health products with round-the-clock delivery in Nigeria, as well as check the originality of products by barcode. You can buy products for the eyes, for joints, products for weight loss, for pressure and dozens of other products from the manufacturer.
yushaFen · June 19, 2023 at 9:46 pm
На сайте https://cluster-mining.com/ закажите оборудование для майнинга, а также производство контейнеров, которые оснащены защитной автоматикой, с сигнализацией, видеонаблюдением. В разделе представлены все асик майнеры. При необходимости есть возможность приобрести приглянувшееся оборудование в лизинг. В компании закажите ремонтные работы со всеми гарантиями и от честных, профессиональных специалистов, которые давно работают в данной сфере. При необходимости воспользуйтесь профессиональной консультацией менеджера, который даст необходимые советы.
Robertpof · June 19, 2023 at 11:16 pm
https://clinic.vsavm.by/wp-content/pgs/smotrite_voennue_filmu_onlayn_besplatno_na_nashem_sayte.html
ontsovFeefs · June 20, 2023 at 1:51 am
Автосервис “Бламерс” оказывает услуги с 1999 года и обслуживает, а также ремонтирует автомобили на инновационном и уникальном оборудовании, которое позволяет быстро выявить и устранить поломку. На сайте https://blamers.ru ознакомьтесь со всем списком услуг, которыми вы сможете воспользоваться прямо сейчас. Каждый клиент получит безупречный уровень сервиса. Действуют доступные цены, что позволит воспользоваться комплексом работ. Предусмотрена система скидок по дисконтным картам.
yegodHig · June 20, 2023 at 2:19 am
Гостевой дом в Голубицкой https://xn--80aaa4cuad0czc.xn--p1ai/ на берегу моря в курортной зоне Краснодарского края предлагает выгодное, удобное, комфортное размещение в номерах со всеми удобствами. Уютная обстановка, приятные цены на проживание, полностью оборудованный гостевой дом сделают ваш отдых приятным и запоминающимся.
Robertpof · June 20, 2023 at 2:32 am
http://www.examen.biz/img/pages/?smotrite_luchshie_filmu_o_sporte_besplatno_onlayn.html
ubrovBic · June 20, 2023 at 3:56 am
На сайте http://project-detal.ru/ вы сможете посмотреть телефон или оформить заявку для того, чтобы заказать такую услугу, как изготовление изделий из металла на заказ. Предприятие в течение длительного времени производит детали на заказ по эскизам, чертежам заказчика. В цеху находится качественное, современное и высокотехнологичное оборудование, что позволяет браться даже за самые сложные работы. Специалисты работают с самыми разными типами стали, цветных металлов, чугуном.
CraigTed · June 20, 2023 at 4:43 am
https://naro-fominskbeton.ru/
WilliamCaL · June 20, 2023 at 5:10 am
https://info-dvd.ru/support/ezine/confirm-html.html?smartemail=berniebermingham%40budiluhur.ac.id
casino_rhymn · June 20, 2023 at 5:34 am
play fortuna casino вход
RafaelBreaG · June 20, 2023 at 5:44 am
https://gis-lab.info/forum/files/inc/?smotrite_besplatno_kachestvennue_boeviki_onlayn.html
stantiLar · June 20, 2023 at 5:52 am
На сайте https://spilno.net/ вы сможете посмотреть новости, которые посвящены Украине. Здесь вы найдете информацию, которая касается экономики, политики, культуры и других сфер жизни. Имеется информация о спецоперации, о преимуществах онлайн-казино в смартфоне, есть интересные статьи, касающиеся доставки еды. Рассматриваются различные медийные персоны, которые будут интересны и вам. Есть актуальные статьи относительно того, как правильно выбрать кроссовки. Опубликованы данные о ремонте стиральных машин с вертикальной загрузкой.
deula.online · June 20, 2023 at 7:42 am
Established in 1926, Coral are 1 of the oldest bookies with
shoos across the nation and a matching betting website.
My web page :: deula.online
RafaelBreaG · June 20, 2023 at 8:57 am
http://med.minusinsk.info/news/articles/?smotrite_luchshie_filmu_uzghasov_onlayn_besplatno.html
ezhenCroge · June 20, 2023 at 9:25 am
На сайте https://yuzhnyj-narkolog.ru/ вы сможете срочно вызвать врача, который работает в анонимной наркологической клинике «Южный нарколог». Оказывается весь спектр медицинской помощи, включая установку капельницы для вывода из запоя. В клинике работают исключительно профессиональные наркологи, которые используют уникальные и абсолютно безопасные методики и препараты. Сотрудники выезжают на объект в течение получаса. Вы сможете воспользоваться услугой срочного вызова врача. Она представляется анонимно.
ankraSkevy · June 20, 2023 at 10:54 am
https://muzfo.net/
read more · June 20, 2023 at 11:34 am
Our Monster Casino review located that the minimum deposit and withdrawal amounts are £10.
My website; read more
Jamesdup · June 20, 2023 at 12:05 pm
Embark on a flavorful journey with the chilling sensation and fruity twist of [url=https://killa-mini.shop/]Killa Mini Banana Ice[/url].
Jamesdup · June 20, 2023 at 12:08 pm
Discover a unique combination of icy coolness and tropical sweetness with [url=https://killa-mini.shop/]Killa Mini Mango Ice[/url].
Jamesdup · June 20, 2023 at 12:10 pm
Immerse yourself in the delicious berry burst of [url=https://killa-mini.shop/]Killa Mini Blueberry[/url]. It’s a flavorful adventure!
Jamesdup · June 20, 2023 at 12:22 pm
Experience the premium sensation with the variety of flavors offered by [url=https://killa-mini.shop/]Killa Mini[/url]. A treat for nicotine pouch lovers!
Warrenempixelm · June 20, 2023 at 12:45 pm
read the full info here
Jamesdup · June 20, 2023 at 3:30 pm
For a smokeless, spitless, and tobacco-free experience, try our premium [url=https://killa-mini.shop/]Nicotine Pouches[/url]. Innovation at its best!
Robertpof · June 20, 2023 at 3:50 pm
https://almatykitap.kz/content/pgs/?smotrite_dramu_onlayn_besplatno_i_bez_registracii.html Подтверждена
MauriceGriem · June 20, 2023 at 4:12 pm
tadalafil online buy cialis cialis usa
Roberto · June 20, 2023 at 4:31 pm
Discover the exciting world of [url=https://killa.space/]killa nicotine pouches[/url] and experience a wide range of flavors like never before!
Isaacmiz · June 20, 2023 at 5:07 pm
займ под залог птс осмотр автомобиля
yelisnop · June 20, 2023 at 7:34 pm
На сайте https://buhlovoz.ru/ вы сможете заказать круглосуточную доставку алкоголя в Екатеринбурге. Можно оформить заказа в телеграм боте и получить скидку. Вся продукция доставляемая курьерами сертифицирована и имеет акцизные марки. Доставка осуществляется быстро и абсолютно легально.
MauriceGriem · June 20, 2023 at 8:29 pm
tadalafil for sale cialis price tadalafil 20mg
here · June 20, 2023 at 9:12 pm
Hollywood Casin has registered a lot of “firsts” in West Virginia.
Here is my blog :: here
Casino_Nuh · June 20, 2023 at 9:24 pm
Я был приятно удивлен простотой процесса регистрации Cat Casino. Всего несколько простых шагов, и я уже был готов начать свое азартное приключение. Зарегистрироваться в Кэт Казино оказалось легко и быстро!
Robertpof · June 20, 2023 at 10:22 pm
https://hordiq.uz/wp-content/articles/prikluchencheskie_filmu_dlya_kazghdogo_zritelya.html
eniysCic · June 20, 2023 at 10:31 pm
На сайте https://ikinos.net/ представлено огромное количество фильмов самого разного жанра, что позволит подобрать решение с учетом предпочтений, вкусов. Все фильмы в отличном качестве, с хорошей озвучкой и созданные талантливыми режиссерами, которые знают толк в этом. Кино самого разного жанра: триллеры, драмы, мелодрамы, комедии. Теперь вы точно знаете, что посмотреть в выходной день, чтобы улучшить настроение, добавить немного позитива. Во всех фильмах играют популярные, талантливые артисты, которые демонстрируют свои способности.
MauriceGriem · June 20, 2023 at 10:39 pm
cialis professional cialis price cialis 20mg
idonovKew · June 21, 2023 at 1:18 am
Сайт https://doskazaymov.kz/ поможет подобрать финансовую организацию или услугу для для получения кредита или займа на самых выгодных условиях. Сравнение процентных ставок и условий получения в одном месте. На сайте представлены как частные объявления, так и услуги организаций.
Robertpof · June 21, 2023 at 1:29 am
https://www.krialenergo.ru/includes/php/otkroyte_dlya_sebya_udivitelnue_miru__besplatnue_onlayn_fantasticheskie_filmu.html
RafaelBreaG · June 21, 2023 at 1:29 am
https://www.freepatent.ru/jquery/pg/smotrite_uvlekatelnue_i_poznavatelnue_dokumentalnue_filmu_onlayn_besplatno.html
dryusWaign · June 21, 2023 at 4:21 am
Слуховой аппарат купить в Москве и по России с доставкой. Центр слуха https://crikun.ru/
RafaelBreaG · June 21, 2023 at 4:36 am
https://infovend.ru/articles/smotrite_luchshie_semeynue_filmu_onlayn_besplatno.html
etiketki_jef · June 21, 2023 at 5:08 am
цветные самоклеящиеся этикетки https://pechat-eticetoc.ru/
webpage · June 21, 2023 at 5:14 am
Since the new tax is going to be 10%, we can cut these projection numbers iin half.
My web-site :: webpage
homepage · June 21, 2023 at 6:02 am
So, licences are not only essential for opening
new markets but also for instilling a level of trust
into the web-site.
my web-site …homepage
yurocRaf · June 21, 2023 at 7:39 am
На сайте ЯАвто.рф вы сможете ознакомиться с лучшими автопарками и такси, которые работают специально для вас. В разделе представлено огромное количество компаний, которые предоставляют свои услуги на максимально выгодных условиях. Напротив каждой компании имеется количество звезд, которое указывает на качество обслуживания, ознакомьтесь и с реальными отзывами от клиентов, которые помогут принять правильное решение о поездке. Из всего многообразия вы обязательно подберете решение, полагаясь на свой вкус.
Robertpof · June 21, 2023 at 7:45 am
http://volgazdrav.ru/includes/pages/okunites_v_atmosferu_dikogo_zapada_s_nashey_kollekciey_vesternov__besplatnuy_onlayn_prosmotr_bez_ogr.html
Enhance brand visibility · June 21, 2023 at 9:07 am
I read this post completely concerning the difference of most
up-to-date and preceding technologies, it’s remarkable
article.
RafaelBreaG · June 21, 2023 at 10:52 am
http://www.examen.biz/img/pages/?smotrite_luchshie_filmu_o_sporte_besplatno_onlayn.html
astukmoinc · June 21, 2023 at 12:59 pm
На сайте https://pond-market.ru/ вы сможете увидеть предложения всех магазинов по тематике товаров для пруда и водоема. Цена на товары для пруда и водоема в одном месте от огромного количества поставщиков, с адресами магазинов и условиями доставки, а также характеристиками товаров. На сайте работает удобный калькулятор доставки.
Jamesdup · June 21, 2023 at 1:10 pm
Discover the refreshing burst of flavor with our [url=https://blck1.live/]BLCK Watermelon[/url] pouches. A tantalizing sensation awaits!
Jamesdup · June 21, 2023 at 1:19 pm
Immerse in the sublime taste of our [url=https://blck1.live/]Juicy Watermelon[/url] pouches. A delight for your senses!
Jamesdup · June 21, 2023 at 1:33 pm
Experience the rich and vibrant taste of our [url=https://blck1.live/]BLCK Melon[/url] pouches. Enjoy the thrill of exotic flavors!
valerolat · June 21, 2023 at 1:42 pm
На сайте https://sochinit.ru/ вы найдете увлекательные, интересные авторские сочинения на самую разную тему, включая животных, анализ рассказов, поэм и многого другого. Здесь их представлено огромное количество, а потому вы обязательно подберете то, что нужно и прямо сейчас. Почитайте интересные и любопытные сочинения, которые проходят в школе и в разных классах. Кроме того, имеются различные анализы произведений, рассматриваются главные герои, присутствует различная любопытная информация, которая будет нужна и вам.
Matthewdup · June 21, 2023 at 1:55 pm
Explore the intensity of our [url=https://killa1.wiki/]Killa Nicopods[/url]. Engage with the robust flavors and strong nicotine hit!
RafaelBreaG · June 21, 2023 at 1:59 pm
http://uzrf.ru/new2/pages/naslazghdaytes_lubimumi_multfilmami_onlayn.html
Matthewdup · June 21, 2023 at 2:03 pm
Embrace the raw power of our [url=https://killa1.wiki/]KILLA dry[/url]. Get ready for a unique and bold nicotine experience!
Matthewdup · June 21, 2023 at 2:16 pm
Discover the enduring taste of our [url=https://killa1.wiki/]KILLA classic[/url]. Enjoy a timeless nicotine journey like no other!
Matthewdup · June 21, 2023 at 4:00 pm
Step into the world of invigorating flavors with our [url=https://killa1.wiki/]KILLA Niclab Flash[/url]. It’s a nicotine adventure that hits you like a flash!
evgenDic · June 21, 2023 at 5:01 pm
На сайте https://lasttorent.ru/ находятся игры, которые вы сможете скачать прямо сейчас на свой компьютер. Они самого разного жанра, а потому вы точно найдете решение с учетом вкусов, предпочтений. Здесь есть аркады, гонки, выживание, стратегии, симуляторы, экшены, шутеры, решения для нескольких игроков. На сайте вы сможете ознакомиться и с новыми отзывами. Есть раздел с топом игр, которые вызывают интерес у большинства. Напротив каждой игры отмечена дата выхода, а также детали перевода. Скачивать можно в любое время.
RafaelBreaG · June 21, 2023 at 5:08 pm
https://revitech.ru/pub/pag/?dobro_pozghalovat_v_nash_onlayn_kinoteatr___smotrite_luchshie_detektivnue_filmu_onlayn_besplatno.html
yaroslTef · June 21, 2023 at 5:38 pm
На сайте https://doka-stroi.ru/ можно заказать такие услуги, как ремонт квартир, дизайн интерьеров в помещении различной площади. Есть предложения для бизнеса – ремонт офисов, коммерческих помещений, баров, кафе, ресторанов. Чтобы сориентироваться во всем многообразии услуг, изучите портфолио. В компании работают компетентные, квалифицированные специалисты с огромным опытом, а потому они знают, как выполнить ремонт в соответствии с предпочтениями клиента и по ГОСТу, согласно нормативам.
adyusAnimb · June 21, 2023 at 6:12 pm
На сайте https://manyhand.online/ вы сможете приобрести с круглосуточной доставкой по России натуральные продукты для здоровья, а также проверить оригинальность продукции по штрих коду. Вы сможете приобрести средства для глаз, для суставов, средства для похудения, от давления и еще десятки видов продукции от производителя.
Перекладные фокусы · June 21, 2023 at 6:33 pm
Asking questions are in fact nice thing if you are not understanding anything entirely, except this post gives pleasant understanding even.
DennisPap · June 21, 2023 at 7:30 pm
Doxycycline is a widely used antibiotic of tetracycline
RafaelBreaG · June 21, 2023 at 8:13 pm
http://skifltd.com/man/rus/smotri_besplatno_kachestvennue_kriminalnue_filmu_onlayn___luchshaya_kollekciya_kriminalnuh_filmov.html
arturBreab · June 21, 2023 at 9:35 pm
https://www.enerprom-spb.com/
belkiHeign · June 21, 2023 at 9:37 pm
На сайте https://kroisam.ru/ вы найдете выкройки одежды на самый разный случай: для дома, на особый праздник, для верхней одежды, белья, аксессуаров, для самых маленьких. Наглядный материал подскажет, как все выполнить правильно и так, чтобы потом с удовольствием носить такую вещь. Есть выкройки как для женщин, так и мужчин, детей обоих полов. Вы сможете составить себе гардероб на любой сезон. Создадите головной убор для своей второй половинки или роскошный купальник. Следуя простым рекомендациям, вы сможете сшить красивую и удобную одежду, которую действительно хочется носить.
https://starzoa.co.kr/---/ · June 21, 2023 at 10:04 pm
Prior to you get in touch iin any of these approaches,
you may like tto check out the site’s FAQ page.
my webpage … https://starzoa.co.kr/%ec%b5%9c%ec%8b%a0-%ec%95%88%ec%a0%84%eb%86%80%ec%9d%b4%ed%84%b0-%ea%b2%8c%ec%9e%84-%ec%95%88%eb%82%b4/
strovcoaxy · June 21, 2023 at 11:07 pm
На сайте https://himchistka-kovrov-kaluga.ru/ оформите заявку для того, чтобы воспользоваться такой важной услугой, как стирка ковров при помощи уникальных, инновационных средств. Специалисты не только на профессиональном уровне очистят изделие, но и придадут приятный, деликатный аромат. Любое пятно, независимо от степени загрязнения, будет очищено быстро и полностью. Услуга будет актуальна в случае, если у вас маленькие дети, домашние животные, образовались загрязнения. Она оказывается по привлекательной стоимости.
remont_viess · June 22, 2023 at 1:40 am
жк новые острова казань официальный сайт
zanaflex 2mg pharmacy · June 22, 2023 at 2:20 am
buy macrobid cost of macrobid macrobid 50mg online
Robertpof · June 22, 2023 at 2:20 am
https://revitech.ru/pub/pag/?dobro_pozghalovat_v_nash_onlayn_kinoteatr___smotrite_luchshie_detektivnue_filmu_onlayn_besplatno.html
bochkStest · June 22, 2023 at 4:46 am
Auf der Website https://mayberest.online/ konnen Sie Naturprodukte fur die Gesundheit der ganzen Familie mit Lieferung rund um die Uhr in Deutschland kaufen und die Originalitat der Produkte per Barcode uberprufen. Sie konnen Produkte fur die Augen, fur Gelenke, Produkte zur Gewichtsreduktion, gegen Druck, fur Haare und Dutzende anderer Arten von Produkten vom Hersteller kaufen.
oshaekal · June 22, 2023 at 5:30 am
На портале https://studio-konstanta.ru вы сможете воспользоваться такими важными услугами, как создание, продвижение сайтов. Доступны услуги «под ключ». Для каждого клиента действует фиксированная стоимость, можно воспользоваться комплексным продвижением сайтов. А у всех профессионалов огромный стаж работы, что позволит взяться за любой проект. При этом расценки вас точно обрадуют. Прямо сейчас вы сможете получить коммерческое предложение. Основная задача специалистов – увеличение продаж в интернете.
소액대출 · June 22, 2023 at 5:46 am
We do this bby sharing the personal information in your
application kind wuth Equifax Limited who are a credit reference agency.
Alsso visit my web site;소액대출
golikhergy · June 22, 2023 at 6:07 am
На сайте https://petro-pol.ru/ вы сможете ознакомиться с огромной коллекцией лучших напольных покрытий, а также приобрести по самым выгодным ценам ламинат, ковролин, паркетную доску, каменный ламинат и много другой продукции с доставкой по Санкт-Петербургу и области, а раздел распродажи позволяет существенно сэкономить.
신용대출 · June 22, 2023 at 7:46 am
Individual loans are lump sums offered by lenders that can be utilised for a wide varioety
off purposes.
My homepage 신용대출
almyknuabe · June 22, 2023 at 9:00 am
На сайте https://ayaks-trening.ru/ закажите обратный звонок для того, чтобы проконсультироваться с менеджером по поводу тренингов. Учебный центр предлагает свои услуги всем желающим повысить квалификацию, стать лучшим в своей профессии. Предоставляется весь комплекс услуг, включая проведение тренингов, семинаров, тимбилдинг, выездные программы, индивидуальное консультирование. Услуги оказываются высококлассными специалистами, которые отлично разбираются в теме. Компания находится на рынке более 15 лет.
nderdRet · June 22, 2023 at 9:12 am
На сайте https://edgov.ru/ Многофункциональные центры (МФЦ) которые предоставляют широкий спектр услуг, вый найдете помощь в оформлении документов, получении государственных услуг и консультации по различным вопросам. Если вы ищете информацию о МФЦ, вы можете легко найти ее онлайн. На сайте также подробная информация о часах работы, адресах и телефонах МФЦ. Чтобы получить информацию о МФЦ, вы можете воспользоваться горячими линиями. На этих линиях вам ответят на любые вопросы, связанные с услугами МФЦ. Если вы ищете информацию о МФЦ, вы можете легко найти ее онлайн или позвонить на горячую линию.
StanleyRot · June 22, 2023 at 11:03 am
https://srochnii-zaem.ru/
genadfrova · June 22, 2023 at 11:22 am
На сайте https://rutor-games.net/ вы сможете скачать самые интересные, а также популярные игры, которые нравятся всем. Получится их скачать через торрент, после чего начать играть тогда, когда хочется. Игры проверены на ошибки и вирусы, а потому вы сможете скачивать, не переживая за безопасность. Каждый день добавляются новые игры, которые помогут вам разнообразить досуг и сделать его интересным и ярким. Вы можете изучить подходящие категории, а также фильмы и многое другое. Также есть раздел с самыми популярными играми.
StanleyRot · June 22, 2023 at 11:49 am
взять долгосрочный займ на карту онлайн
Mariam · June 22, 2023 at 11:54 am
Despite its subject matter issue, the sequence continues to be lighthearted and even comical, at occasions, by averting the darkish features and opportunity dangers of prostitution.
My web site … http://Ultfoms.ru/user/MeriCedeno19/
buehntes · June 22, 2023 at 12:02 pm
На сайте https://3new.ru/kak-vibrat-idealniy-avtomobil-dlya-semii-soveti-i-recomendacii
ознакомьтесь с полезными лайфхаками, которые посвящены всему, что сделает вашу жизнь проще, легче и интересней. Полезные и нужные рекомендации составлены теми, кто сам сталкивался с данной темой, а теперь решает поделиться наблюдениями с другими. Так вы узнаете о том, как начать пользоваться банковской картой бесплатно, каким образом получится выполнить рассылку в Вайбере абсолютно бесплатно. Имеются рекомендации о том, как сделать интернет в домашних условиях.
Обучение · June 22, 2023 at 12:29 pm
[url=https://obuchenie-za-rubezhom-2023.ru/]Обучение за рубежом[/url]
РАВНЫМ ОБРАЗОМ абитуриенты, да ломящие умелицы разнообразного степени, возымевших школьное или суп верховное образование в течение России, часто заинтересованы в обучении согласен рубежом. НА первую очередь этто связать руки капля тем, яко теперь знания быстро сбрасывают актуальность.
Обучение за рубежом
StanleyRot · June 22, 2023 at 12:31 pm
занять 10000 рублей срочно на карту
Огнетушитель · June 22, 2023 at 12:37 pm
[url=https://ognetushiteli-kupit.ru/]огнетушитель[/url]
Купить Огнетушители – со стороны высших властей 266 товаров числом цене от 320 рублей всего быстрой и бесплатной доставкой в 690+ торговых центров да гарантией числом от мала до велика Стране россии: отголоски, …
огнетушитель
gleboAnoke · June 22, 2023 at 1:43 pm
На сайте https://aa-p.ru/ вы сможете ознакомиться с прайс-листом, где представлены запчасти для сельхозтехники. Компания реализует детали как оптом, так и в розницу, а потому каждый желающий получает возможность сделать приобретение в любом объеме. Доставка происходит в наиболее комфортное для вас время. Каждый клиент сможет воспользоваться профессиональной консультацией по подбору, чтобы приобрести именно то, что подходит больше всего. Все детали надежные, практичные и наделены длительным эксплуатационным сроком.
vochkgak · June 22, 2023 at 3:22 pm
Auf der Website https://myfirstbrand.site/ konnen Sie Naturprodukte fur die Gesundheit der ganzen Familie vom Hersteller mit Lieferung rund um die Uhr in Deutschland kaufen und die Originalitat der Produkte per Barcode uberprufen. Sie konnen Produkte fur Augen, Gelenke, Gewichtsverlust, Druck, Haare, Nagel, Korperschonheit und Dutzende anderer Produkte kaufen.
Robertpof · June 22, 2023 at 5:32 pm
https://www.freepatent.ru/jquery/pg/smotrite_uvlekatelnue_i_poznavatelnue_dokumentalnue_filmu_onlayn_besplatno.html
신불자 대출 · June 22, 2023 at 6:59 pm
Speak with a local attorney who is familiar with the laws
in your state prior to you cease payment.
Also visit my blog post: 신불자 대출
arostiagews · June 22, 2023 at 7:20 pm
На сайте https://moon.market/ вы сможете получить деньги за скины максимально оперативно. Перед вами лучшие расценки за предложенные товары. Это доступно при помощи оперативной и комфортной транзакции. Вы можете реализовать скины прямо сейчас и получить за это неплохие деньги. Важным моментом является то, что платежи мгновенные, отсутствуют скрытые проценты, все финансовые операции защищены, а потому данные не попадут третьим лицам. В этой компании самая лучшая цена на рынке. Каждому доступно оптовое предложение.
rtynovjew · June 22, 2023 at 9:45 pm
На сайте https://mrdivanoff.ru/ вы сможете купить качественную, презентабельную мебель в любое помещение, включая детскую комнату, кухню, кабинет, спальню. Все изделия создаются из надежных материалов, которые прослужат длительное время и не изменят своего изначального внешнего вида. Наиболее популярными категориями являются угловые диваны, кресла, шкафы, кухонные гарнитуры, шкафы-купе, гостиные гарнитуры. Мебель соответствует самым жестким требованиям. Воспользуйтесь оперативной доставкой либо заберите самостоятельно.
efimopoupe · June 23, 2023 at 1:59 am
Op de site https://buymake.store/ kunt u natuurlijke producten voor de gezondheid van het hele gezin van de fabrikant kopen met 24-uurs levering in Belgium, en de originaliteit van producten controleren met een streepjescode. U kunt producten kopen voor de ogen, gewrichten, gewichtsverlies, druk, haar, nagels, schoonheid van het lichaam en tientallen andere producten.
Robertpof · June 23, 2023 at 2:37 am
https://infovend.ru/articles/smotrite_luchshie_semeynue_filmu_onlayn_besplatno.html
olesniGam · June 23, 2023 at 5:10 am
На сайте https://jj-life.ru/ почитайте интересные, содержательные и информативные статьи на тему моды, эффективных диет, составленные экспертами. Есть контент на тему воспитания детей, рецепты, советы для беременных. Имеется информация о том, как сделать красивый и привлекательный макияж для женщин с карими глазами. Каждая статья сопровождается цветной картинкой, а самое главное, что здесь вы найдете много нового и полезного для себя. Если не знаете, как выбрать серьги, то и эта информация присутствует здесь.
ashutLic · June 23, 2023 at 5:39 am
На сайте https://partscenter-yug.ru/ вы подберете запчасти, воспользовавшись специальным поиском по артикулу. Это позволит найти необходимый вариант оперативно и получить профессиональную помощь. Перед вами список всех запчастей от самых популярных брендов, которые вы сможете заказать прямо сейчас. Также получится оформить заявку на быстрый и профессиональный ремонт, диагностику. Через полчаса менеджер перезвонит и уточнит информацию. Кроме того, будет оказана помощь в выборе каталожного номера, если деталь больше не выпускается.
ochkiunfal · June 23, 2023 at 5:43 am
На сайте https://kinoha-hd.net/ имеются фильмы, которые будет интересно посмотреть каждому. Опубликованы как легендарные фильмы, которые в свое время наделали много шума, так и многообещающие новинки, которые только собирают свою аудиторию. Смотрите то, что вам нравится и в хорошем качестве, без регистрации, абсолютно бесплатно. Имеются фильмы самого разного жанра, а потому за просмотром вам точно не придется скучать. Просматривайте фильмы абсолютно бесплатно и в любое время.
Richardwosse · June 23, 2023 at 5:52 am
https://telegra.ph/kupit-asik-06-19-8
Richardwosse · June 23, 2023 at 6:42 am
https://telegra.ph/kupit-asik-06-19-50
nderdReq · June 23, 2023 at 7:34 am
На сайте вы узнаете https://pensinfo.ru/ Какие отделения Пенсионного Фонда оказывают помощь в получении выплат на обучение? Получите помощь в восстановлении утерянных документов и правильном оформлении документов на пенсию – обращайтесь к нам за помощью.
Richardwosse · June 23, 2023 at 7:35 am
https://telegra.ph/kupit-asik-06-19-84
Richardwosse · June 23, 2023 at 8:28 am
Ремонт antminer
Richardwosse · June 23, 2023 at 9:22 am
https://www.avito.ru/pyatigorsk/oborudovanie_dlya_biznesa/asic_whatsminer_m50_120th_realnoe_nalichie_3103957912
Richardwosse · June 23, 2023 at 10:14 am
https://telegra.ph/kupit-asik-06-19-25
동행복권 스피드키노 · June 23, 2023 at 11:07 am
It really is the third lagest jackpot in Mega Millions history and only the third
time for the jakpot to be above $1 billion.
My blog – 동행복권 스피드키노
Juhadup · June 23, 2023 at 11:27 am
Nauti lopullisesta parhaasta [url=https://killa-mini.fun/]Killa Nikotiinipussit[/url] kokemuksesta premium-makukokoelmallamme!
Friedrichdup · June 23, 2023 at 11:38 am
Genie?en Sie das ultimative [url=https://killa-mini.fun/]Killa Nikotinbeutel[/url] Erlebnis mit unserer Premium-Auswahl an Geschmacksrichtungen!
StefanWhina · June 23, 2023 at 11:56 am
Erleben Sie das ultimative [url=https://killa-mini.fun/]KILLA MINI Nikotinbeutel[/url] Erlebnis mit unserer Premium-Auswahl an Geschmacksrichtungen!
Richardwosse · June 23, 2023 at 11:59 am
https://telegra.ph/kupit-asik-06-19-96
Jaakkodup · June 23, 2023 at 12:01 pm
Nauti ylitse muiden [url=https://killa-mini.fun/]Killa mini nikotiinipussit[/url] kokemuksesta premium makujemme kokoelman avulla!
RobertPlurb · June 23, 2023 at 12:07 pm
Koe lopullinen paras [url=https://killa-mini.fun/]Killa Nikotiinipussi[/url] kokemus premium-makujen kokoelmastamme!
JamesTit · June 23, 2023 at 12:16 pm
Delve into the rich and enjoyable experience of [url=https://killa1.wiki/]Killa Nicopods[/url] with our exquisite range of flavors!
zmaylrox · June 23, 2023 at 12:33 pm
https://manybrand.online/ сайтында Қазақстан бойынша тәулік бойы жеткізілімі бар өндірушіден бүкіл отбасы үшін табиғи денсаулыққа арналған өнімдерді сатып алуға болады, сонымен қатар өнімнің түпнұсқалығын штрих-код арқылы тексеруге болады. Сіз көз, буын, салмақ жоғалту, қысым, шаш, тырнақ, дене сұлулығы және басқа да ондаған өнімдерді сатып ала аласыз.
KennethWak · June 23, 2023 at 12:55 pm
https://srochnii-zaem-online.ru/
eniskaper · June 23, 2023 at 1:36 pm
На сайте https://cluster-mining.com/ вы сможете приобрести качественное, надежное оборудование для майнинга от известных брендов, которые положительно себя показали. Компетентные сотрудники специально для вас и по индивидуальному эскизу изготовят контейнер необходимых размеров. В помещении будет установлено видеонаблюдение, сигнализация, а управлять можно и удаленно. Комплектуется полками для вашего удобства. При необходимости вы сможете сделать приобретение в лизинг. Здесь же можно заказать ремонт с гарантией.
KennethWak · June 23, 2023 at 2:46 pm
займ 1000 рублей срочно где взять
Juhodup · June 23, 2023 at 2:56 pm
Nauti ultimaattisesta [url=https://blck.bio/]eksoottinen makualue[/url] kokemuksesta premium valikoimamme kanssa!
Heinrichdup · June 23, 2023 at 2:57 pm
Tauchen Sie ein in das ultimative [url=https://blck.bio/]exotischer geschmack[/url] Erlebnis mit unserer Premium Kollektion an Aromen!
tamonoAffix · June 23, 2023 at 3:11 pm
На сайте https://nedvij-ka.ru/ вы найдете полезную и важную информацию, которая касается недвижимости. Портал охватывает все вопросы, включая ипотечное кредитование, рекомендации относительно выбора недвижимости. Есть информация про банки, которые предлагают лучшие условия по ипотеке. Для того чтобы подыскать нужную информацию, необходимо воспользоваться специальной картой сайта. Есть и последние новости, которые понравятся всем, кто интересуется недвижимостью. Ежедневно выкладываются новые статьи, которые помогут разобраться в различных вопросах.
Johndup · June 23, 2023 at 3:19 pm
Experience the unparalleled sensation of our [url=https://blck.bio/]BLCK[/url] nicotine pouches, each delivering a unique flavor profile!
Johndup · June 23, 2023 at 3:26 pm
Immerse yourself in the distinctive taste of [url=https://blck.bio/]BLCK Blueberry[/url] nicotine pouches, a unique addition to our premium flavor collection!
Johndup · June 23, 2023 at 3:42 pm
Experience the refreshing and sweet taste of our [url=https://blck.bio/]BLCK Melon[/url] nicotine pouches, an exciting twist to our premium collection!
Борис · June 23, 2023 at 4:26 pm
На сайте https://eirc-mo.ru/ Зайти в Личный кабинет можно с главной страницы сайта МосОблЕИРЦ через кнопку «Новый личный кабинет МосОблЕИРЦ Онлайн»
GAY klubs Sarknan Dupsitis · June 23, 2023 at 4:56 pm
GAY Clubs Sarknan Dupsitis
Feel free to surf to my homepage … GAY klubs Sarknan Dupsitis
chaiMEP · June 23, 2023 at 5:12 pm
[url=https://zavaristika.ru/catalog/puer]чай пуэр прессованный купить[/url] или [url=https://zavaristika.ru/catalog/chernyj-chaj]красный чай купить в москве[/url]
https://zavaristika.ru
DennisPap · June 23, 2023 at 6:34 pm
doxycycline 500mg capsules doxycycline for acne Doxycycline from india
DennisPap · June 23, 2023 at 7:41 pm
cheap Doxycycline buy doxycycline doxycycline 400 mg tablet
aricept tablets · June 23, 2023 at 8:42 pm
divalproex medication where can i buy divalproex divalproex online
DennisPap · June 23, 2023 at 8:59 pm
Antibiotic Doxycycline coupons doxycycline doxycycline 500mg capsules
zhilinAnich · June 23, 2023 at 9:32 pm
На сайте https://hyggehouse23.ru/ вы сможете заказать номер на уютной и комфортабельной базе отдыха. Вас ожидает презентабельная усадьба, от которой каждый член семьи придет в восторг. Здесь удивительная и живописная природа, есть бассейн, отдельная парковка, бесплатный интернет, мото прокат. На некоторое время вы погрузитесь в роскошную атмосферу, вдалеке от города. Для бронирования необходимо позвонить по телефону. Приезжайте сюда для того, чтобы зарядиться позитивом и отличным настроением.
uraveinicy · June 23, 2023 at 11:06 pm
Στο site https://oneneo.online/ μπορείτε να αγοράσετε φυσικά προϊόντα υγείας για όλη την οικογένεια από τον κατασκευαστή με 24ωρη παράδοση στην Ελλάδα, καθώς και να ελέγξετε την πρωτοτυπία των προϊόντων με barcode. Μπορείτε να αγοράσετε προϊόντα για μάτια, αρθρώσεις, απώλεια βάρους, πίεση, μαλλιά, νύχια, ομορφιά σώματος και δεκάδες άλλα προϊόντα.
valeriyPloli · June 24, 2023 at 12:00 am
На портале https://kinogo.gr/ представлено огромное количество интересных фильмов в отличном качестве и с объемным звуком, многоголосым переводом. Огромный выбор фильмов самого разного жанра, что позволит выбрать решение с учетом собственных предпочтений, вкусов. Возможно, сегодня вам захочется посмотреть драму, а завтра – комедию. Любые вкусы будут удовлетворены. Имеются фильмы прошлых лет, а также новинки, которые точно никого не оставят равнодушным. Заходите сюда почаще, чтобы разнообразить досуг.
casino_viess · June 24, 2023 at 12:16 am
https://happyphilosophy.ru/
kolectaf · June 24, 2023 at 1:09 am
На сайте https://avto-drives.ru/ вы сможете почитать всю интересную, увлекательную информацию об автомобилях и правилах их обслуживания. Так вы узнаете о том, как понять, что катализатор забит и его рекомендуется поменять, как сэкономить на длительном путешествии и нужно ли приобретать кондиционер для своего авто. Имеется информация, которая касается безопасности за рулем. Вы сможете ознакомиться с тест драйвами, тюнингом авто. Все статьи и видеоматериалы будут интересны автолюбителям.
RobertNoiff · June 24, 2023 at 6:53 am
https://telegra.ph/kupit-asik-06-19-75
Марина · June 24, 2023 at 7:08 am
На сайте https://govinsurance.ru/ — Пошаговое руководство по регистрации на официальный сайте и входу в личный кабинет ФСС. Обзор функционала и возможностей личного кабинета Фонда.
fedyaErami · June 24, 2023 at 7:38 am
На сайте https://hd.lord-films.tv/1054-illyuziya-obmana-film-2013-15 вы найдете самые популярные, а также редкие фильмы самых разных жанров: боевики, триллеры, драмы, исторические, которые понравятся даже истинным меломанам. Здесь имеются интригующие новинки, выхода которых ожидали уже давно. Все кино в отличном качестве, с хорошим звуком, что позволит насладиться просмотром на полную мощь. Для того чтобы отыскать нужный вариант, необходимо просто воспользоваться фильтром, который подберет то, что нужно.
RobertNoiff · June 24, 2023 at 7:54 am
https://telegra.ph/kupit-asik-06-19-31
RobertNoiff · June 24, 2023 at 8:55 am
https://telegra.ph/kupit-asik-06-19-90
RobertNoiff · June 24, 2023 at 9:56 am
https://telegra.ph/kupit-asik-06-19-48
RobertNoiff · June 24, 2023 at 10:56 am
купить асики для майнинга
ostniDiace · June 24, 2023 at 11:14 am
На сайте https://j-man.ru/ вы сможете ознакомиться с содержательным, интересным и качественным контентом, который посвящен мужчинам и их отношениям с женщинами. Так вы узнаете о том, что сильный пол думает о женщинах с татуировками. Будете в курсе того, как часто необходимо заниматься спортом в тренажерном зале, о технике приседаний со штангой. Имеется информация про питание, здоровье, о том, как эффектно сделать предложение женщине. Есть информация об интимной близости, а потому вы узнаете, как стать идеальным любовником.
RobertNoiff · June 24, 2023 at 11:55 am
https://telegra.ph/kupit-asik-06-19-66
RobertNoiff · June 24, 2023 at 12:55 pm
https://telegra.ph/kupit-asik-06-19-26
파워볼중계 · June 24, 2023 at 1:19 pm
Other unwanted app can hijack browsers and restrict/deny access to
settings to market fake search engines.
Feel free to visit my homepage – 파워볼중계
RobertNoiff · June 24, 2023 at 1:58 pm
https://telegra.ph/kupit-asik-06-19-92
Вероника · June 24, 2023 at 2:25 pm
Спасибо большое за информацию https://edgov.ru/mfc-kirovsk.html МФЦ в Кировске, ул. Набережная д. 29А: официальный сайт МФЦ, адрес, телефон, часы работы.
RobertNoiff · June 24, 2023 at 2:59 pm
https://telegra.ph/kupit-asik-06-19-43
halla2 · June 24, 2023 at 3:41 pm
This is the perfect blog for everyone who would like to find
out about this topic. You understand a whole lot its almost tough to argue with you (not
that I personally will need to…HaHa). You certainly put a fresh spin on a topic that’s been written about for years.
Great stuff, just great!
RobertNoiff · June 24, 2023 at 3:59 pm
майнинг ферма под ключ
RobertNoiff · June 24, 2023 at 4:57 pm
https://telegra.ph/kupit-asik-06-19-79
ilinsJab · June 24, 2023 at 5:03 pm
На сайте https://www.lordfilm.monster/56481-ne-zabiray-menya-domoy-film-2017-27
вы сможете найти фильмы высокого качества и созданные популярными режиссерами. Здесь они представлены в огромном многообразии, а потому вы обязательно отыщите то, что улучшит настроение и произведет на вас эффект. Есть как драмы, так и мелодрамы, комедии, интригующие триллеры, детективы с неожиданным концом. Все фильмы в отличном качестве, а главное, что смотреть их можно без регистрации, в любое время и независимо от устройства, даже в дороге, в перерывах между работой или учебой.
RobertNoiff · June 24, 2023 at 5:56 pm
https://telegra.ph/kupit-asik-06-19-28
RobertNoiff · June 24, 2023 at 6:55 pm
https://telegra.ph/kupit-asik-06-19-100
Софья · June 24, 2023 at 7:49 pm
Спасибо вам за информацию https://pensinfo.ru/pensionnyj-fond-v-tlyarate/ Пенсионный фонд в Тлярате: официальный сайт, адрес, телефоны, часы работы.
Jorgeexcut · June 24, 2023 at 7:55 pm
https://telegra.ph/kupit-asik-06-19-98
Jorgeexcut · June 24, 2023 at 8:48 pm
https://telegra.ph/kupit-asik-06-19-61
stepanet · June 24, 2023 at 9:13 pm
На сайте https://jenskiyjournal.ru/ вы сможете ознакомиться с темами, которые интересны женскому полу. Здесь размещен контент о здоровье, красоте, косметологических процедурах, о том, в чем пойти на первое свидание, есть информация о том, как выбрать ювелирные украшения, об омолаживающих процедурах, отдыхе, воспитании детей и всем том, что интересует каждую современную женщину. И самое важное, что контент составлен профессионалами, которые дают ценные рекомендации. На портале постоянно публикуются новые статьи, которые интересно почитать и вам.
Jorgeexcut · June 24, 2023 at 9:40 pm
https://telegra.ph/kupit-asik-06-19-23
trubi_rhymn · June 24, 2023 at 11:13 pm
труба пнд https://pnd-trubi-moskva.ru/
Jorgeexcut · June 24, 2023 at 11:23 pm
https://telegra.ph/kupit-asik-06-19-53
zapoy_viess · June 24, 2023 at 11:37 pm
вывод из запоя в стационаре https://vivedenie-iz-zapoya.ru/
Jorgeexcut · June 25, 2023 at 12:14 am
https://telegra.ph/kupit-asik-06-19-17
narcolog_emaic · June 25, 2023 at 12:20 am
нарколог на дом вывод из запоя https://narcolog-dom-moscva.ru/
Jorgeexcut · June 25, 2023 at 1:06 am
https://telegra.ph/kupit-asik-06-19-92
Haydenempixelm · June 25, 2023 at 1:47 am
Continue
Jorgeexcut · June 25, 2023 at 1:57 am
https://telegra.ph/kupit-asik-06-19-62
omaroPek · June 25, 2023 at 2:29 am
На сайте https://ru.lord-film.tv/70182-posledneye-korolevstvo-sem-koroley-dolzhny-umeret-film-2023-15 находятся фильмы в отличном качестве и в огромном многообразии, что позволит подобрать вариант под свои предпочтения. Вы обязательно найдете фильм для просмотра после работы или в выходной день, что позволит разнообразить досуг и сделать его более ярким, запоминающимся. А самое главное, что все фильмы находятся в отличном качестве, с объемным звуком. Найдете как комедии, так и триллеры, драмы, историческое кино и многое другое. Подборка фильмов составлена с учетом предпочтений каждого зрителя.
Jorgeexcut · June 25, 2023 at 2:47 am
https://telegra.ph/kupit-asik-06-19-21
Jorgeexcut · June 25, 2023 at 3:36 am
https://telegra.ph/kupit-asik-06-19-103
Jorgeexcut · June 25, 2023 at 4:25 am
https://telegra.ph/kupit-asik-06-19-67
Jorgeexcut · June 25, 2023 at 5:13 am
https://telegra.ph/kupit-asik-06-19-28
Jorgeexcut · June 25, 2023 at 6:01 am
асики для майнинга купить
Jorgeexcut · June 25, 2023 at 6:50 am
https://telegra.ph/kupit-asik-06-19-70
iridonNub · June 25, 2023 at 7:05 am
На сайте https://www.skladtehkomplekt.ru/ вы сможете приобрести аккумуляторы, складскую технику, которая наделена надежностью, практичностью, а также безупречными эксплуатационными свойствами. Предприятие длительное время занимается поставками, что позволило изучить потребности, требования каждого клиента, чтобы предложить лучшее. Закажите здесь электротележки, запчасти и многое другое по привлекательным ценам, с оперативной доставкой. Специально для вас действуют профессиональные консультации.
Руслана · June 25, 2023 at 7:25 am
Большое спасибо вам за информацию https://helpgov.ru/ — Госуслуги – вход в личный кабинет для физических лиц. Чтобы авторизоваться на портале Госуслуги, нажмите на ссылку «Личный кабинет» или кнопку «Войти».
Jorgeexcut · June 25, 2023 at 7:40 am
https://telegra.ph/kupit-asik-06-19-36
Jorgeexcut · June 25, 2023 at 8:31 am
https://telegra.ph/kupit-asik-06-19-9
auto insurance · June 25, 2023 at 9:16 am
I’m amazed, I have to admit. Rarely do I encounter a blog that’s both equally educative and
interesting, and without a doubt, you have hit the nail on the head.
The problem is an issue that too few folks are speaking intelligently about.
I’m very happy I came across this during my search for something concerning this.
Feel free to surf to my blog – auto insurance
intimkuastrpny · June 25, 2023 at 10:05 am
[url=https://intimkuastrpny.dp.ua/]intimkuastrpny[/url]
Страпоны также фаллопротезы. Прибрать подкатегорию, Безремневые страпоны, Чтобы девушек, Чтобы мужчин, Анальные, Парные, Трусы harness, Насадки чтобы страпонов.
intimkuastrpny
GELNANEHTY · June 25, 2023 at 10:15 am
[url=https://gely-na-nehty.com/]Gel na nehty[/url]
Gel na nehty jsou oblibenym produktem, ktery si vybiraji zacatecnici i zkuseni remeslnici. Toto je alternativa ke starsi metode pouzivani prekryvnych vrstev. Pomoci gelovych nastavcu vznikaji krasne a pevne nehty.
Gel na nehty
robaxin cost · June 25, 2023 at 10:38 am
anastrozole coupon anastrozole 1mg for sale anastrozole prices
Craigboils · June 25, 2023 at 10:42 am
https://club.foto.ru/user/669164
Craigboils · June 25, 2023 at 11:45 am
https://forum.readyscript.ru/user/1996/
Дарья · June 25, 2023 at 11:53 am
Спасибо большое за предоставленную информацию https://xn—-7sbnvcylw.xn--p1ai/ Генератор куар кода в считаные минуты поможет сформировать qr код онлайн – Цветной qr код бесплатно можно создать и распечатать с qr код генератором.
ArthurWaiPt · June 25, 2023 at 1:16 pm
https://cellphoneforums.net/chit-chat/t471534-binance-casino.html#post1709070
Сергей · June 25, 2023 at 3:25 pm
Это полезная информация https://xn--80aaaaaablq1bxfe3aug0afmuhd9g8ika.xn--p1ai/%d0%b1%d1%80%d1%8f%d0%bd%d1%81%d0%ba%d0%be%d0%b9-%d0%be%d0%b1%d0%bb%d0%b0%d1%81%d1%82%d0%b8/ Публичная кадастровая карта Брянской области.
Stanleyeuron · June 25, 2023 at 4:03 pm
калькулятор лизинга автомобиля для юридических
Stanleyeuron · June 25, 2023 at 4:51 pm
https://wagner-automobile.ru/
Артур · June 25, 2023 at 7:23 pm
Полезная информация https://mfc-moskva-mo.ru/mfc-noginsk.html МФЦ в Ногинске – адрес, телефон, режим работы отделения.
homepage · June 25, 2023 at 7:59 pm
This bonus will be fully activaterd after you totally wager the £10
deposit on any game onn the platform.
Here is my page :: homepage
Stanleyeuron · June 25, 2023 at 8:35 pm
лизинг помещений для юридических лиц
Stanleyeuron · June 25, 2023 at 9:08 pm
трактор в лизинг для юридических
Stanleyeuron · June 26, 2023 at 1:04 am
лизинг калькулятор онлайн для юридических лиц
Stanleyeuron · June 26, 2023 at 1:39 am
лизинг транспорта
winner.noma.com · June 26, 2023 at 2:03 am
An interesting discussion is definitely worth comment. I do believe that
you should publish more about this issue, it may not
be a taboo subject but generally folks don’t discuss these topics.
To the next! All the best!!
rocket_emaic · June 26, 2023 at 3:44 am
Сигналы Rocket Queen
CraigTed · June 26, 2023 at 5:44 am
бетон 13 домодедово
Stanleyeuron · June 26, 2023 at 6:10 am
взять грузовик в лизинг
Артур · June 26, 2023 at 6:17 am
Все расписано достаточно подробно https://city-karta.ru/semejnaya-komanda/ Регистрация карты — «Семейная команда».
eniskwer · June 26, 2023 at 7:17 am
На сайте https://smsbro.org/ воспользуйтесь уникальным и бесплатным сервисом, который создан специально для того, чтобы получать СМС-сообщения. И при этом нет необходимости проходить регистрацию. Необходимо лишь выбрать номер, представленный из списка, который находится чуть ниже. Используйте его для того, чтобы получить сообщения из любой социальной сети – WhatsApp, Instagram, Telegram, Google. Воспользуйтесь неограниченным количеством входящих СМС, а также бесплатным телефонным номером.
ereshniB · June 26, 2023 at 7:41 am
The site https://en.ikea-club.org/ is a club of IKEA lovers. The site contains all the information about IKEA, its history. You can find out how to remake furniture, furniture reviews, a catalog of goods with owner reviews is presented. There is a catalog of companies that deliver IKEA goods in Russia and the CIS countries.
bykovSHULK · June 26, 2023 at 7:41 am
На сайте https://soccerforma.com/ вы сможете приобрести взрослую и детскую форму игроков лучших футбольных команд. К важным преимуществам покупки в этом интернет-магазине относят то, что вся продукция реализуется по оптимальной стоимости. Товар высокого качества, а потому ткань не испортит своего внешнего вида длительное время, а краски не поблекнут. Вы сможете носить экипировку долгое время. Сервис максимально продуман для клиентов, а потому оплатить покупку получится после получения.
roitskNet · June 26, 2023 at 7:49 am
Сайт https://xn—2-blc0aaka7bficdu0l.xn--p1ai/ это возможность заказать недорогие экскурсии по Санкт-Петербургу с различными маршрутами, опытными гидами и прекрасно знающими город экскурсоводами. Вы сможете посетить знаменитые места, такие как Эрмитаж, Петропавловскую крепость, Зимний дворец и многое другое.
WilliamRit · June 26, 2023 at 8:11 am
http://www.ifoxy.ru/viewtopic.php?f=37&t=29629
WilliamRit · June 26, 2023 at 8:43 am
https://boryslav.do.am/forum/9-12664-1
denisKepay · June 26, 2023 at 8:44 am
На сайте https://www.aoks-spb.com/ представлено дробеструйное оборудование для различных производств и независимо от масштаба. Конструкции применяются везде, в том числе, в небольших частных предприятиях, средних производствах, крупных заводах. На сайте находится исключительно качественное, надежное, функциональное оборудование с длительными сроками эксплуатации. На портале обязательно ознакомьтесь с тематическими статьями, а также новостями, которые будут вам полезны.
WilliamRit · June 26, 2023 at 9:16 am
http://vld.best-city.ru/forum/thread70131/
WilliamRit · June 26, 2023 at 9:47 am
https://gti-club.ru/forum/showthread.php?t=58528
WilliamRit · June 26, 2023 at 10:19 am
http://forum.krolevets.com/viewtopic.php?t=6259
Maxbenly · June 26, 2023 at 10:41 am
Tauchen Sie ein in das ultimative [url=https://killa-mini.fun/]Nikotinbeutel[/url]-Erlebnis mit unserer hochwertigen Auswahl an Geschmacksrichtungen!
WilliamRit · June 26, 2023 at 10:50 am
https://bolshoyvoprosik.ru/viewtopic.php?id=14458
SofiaVaf · June 26, 2023 at 10:50 am
Nauti parhaasta [url=https://killa-mini.fun/]nikotiinipussit[/url]-kokemuksesta laadukkaalla makujen valikoimallamme!
Robertdup · June 26, 2023 at 11:15 am
Genie?en Sie das ultimative [url=https://killa-mini.art/]minzgeschmack tabakfrei[/url]-Erlebnis mit unserer hochwertigen Auswahl an Geschmacksrichtungen!
София · June 26, 2023 at 11:19 am
Большое спасибо за информацию https://beregienergy.ru/mosenergosbyt-v-istre/ Мосэнергосбыт в Истре: официальный сайт, часы и график работы, телефон.
Robertdup · June 26, 2023 at 11:28 am
Nauti parhaasta [url=https://killa-mini.art/]nikotiinipussi[/url]-kokemuksesta laadukkaalla makukokoelmallamme!
WilliamRit · June 26, 2023 at 11:55 am
http://mypenza.ru/forum/index.php?showtopic=54134
Robertdup · June 26, 2023 at 12:32 pm
Indulge in the ultimate best [url=https://killa-mini.bio/]all white pouches[/url] experience with our premium collection of flavors!
Robertdup · June 26, 2023 at 12:44 pm
Genie?en Sie das ultimative [url=https://killa-mini.bio/]klassischer nikotinbeutel[/url] Erlebnis mit unserer hochwertigen Geschmackskollektion!
WilliamRit · June 26, 2023 at 1:07 pm
https://forum-moskva.forum2x2.ru/t17593-topic
Robertdup · June 26, 2023 at 2:08 pm
Hemmottelun parhaimpaan [url=https://killasnus.weeblysite.com/]Killa nikotinipussit[/url] -kokemukseen premium-makujemme valikoimasta!
Robertdup · June 26, 2023 at 2:17 pm
Indulge in the ultimate best [url=https://pouches.killapods.de/]Buy Nicotine Pouches[/url] experience with our premium collection of flavors!
Robertdup · June 26, 2023 at 2:40 pm
Indulge in the ultimate best [url=https://killa-mini.bio/]Frosty Menthol[/url] experience with our premium collection of flavors!
Robertdup · June 26, 2023 at 2:46 pm
Genie?en Sie das ultimative [url=https://killa-mini.bio/]16 mg-g nikotin[/url] Erlebnis mit unserer exklusiven Auswahl an Geschmacksrichtungen!
Владислав · June 26, 2023 at 2:58 pm
Спасибо за подробную информацию https://tvojamoskva.ru/ «Личный кабинет» pgu.mos.ru показания счётчиков. Электронный дневник в «Личном кабинете» pgu.mos.ru. Вход в «Личный кабинет» на пгу.мос.ру.
ladiklon · June 26, 2023 at 3:02 pm
На сайте https://hyggehouse23.ru/ позвоните по телефону для того, чтобы забронировать комфортабельный номер либо коттедж для того, чтобы насладиться удивительной природой и роскошными видами. Услужливый персонал создаст приятную и непринужденную обстановку, чтобы отдых вам точно понравился и захотели вернуться сюда вновь. Для того чтобы принять окончательное решение о поездке, посмотрите интересный и любопытный ролик о турбазе. Вас обрадует первоклассный уровень обслуживания, а также привлекательные расценки.
Robertdup · June 26, 2023 at 3:34 pm
Erleben Sie den ultimativen [url=https://killa-mini.bio/]eiskalt mentholkick[/url] mit unserer exklusiven Auswahl an Geschmacksrichtungen!
uspenLok · June 26, 2023 at 3:43 pm
Сайт https://gomeovet.ru/ представляет собой ветеринарную аптеку, в которой вы сможете приобрести все, что необходимо для братьев меньших, включая: корма, лекарства и многое другое по привлекательным ценам. При этом доступна оперативная доставка. Здесь имеется продукция для всех питомцев, в том числе, кошек, собак, попугаев, лошадей, грызунов. Все товары оригинальные, сертифицированные, полностью безопасные в использовании. В аптеке имеются даже редкие средства, приобрести которые можно сейчас.
vammebel.ru · June 26, 2023 at 3:53 pm
Hiya! I know this is kinda off topic however , I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog article or vice-versa? My site goes over a lot of the same subjects as yours and I believe we could greatly benefit from each other. If you are interested feel free to send me an e-mail. I look forward to hearing from you! Superb blog by the way!
Davidusaks · June 26, 2023 at 4:00 pm
https://bpz-vostok.ru/
melevnor · June 26, 2023 at 4:10 pm
На сайте https://obozrevatel.org/ вы сможете получить всю необходимую, актуальную и свежую информацию на тему экономики, политики. Материалы обновляются ежедневно, чтобы вы получили только актуальные данные. Имеются статьи, касающиеся СВО, есть интервью первых лиц, популярных личностей, которые раскроют секреты того, что происходит сейчас в мире. Есть и сведения о криминале, здоровье. Только на этом портале есть все, что интересует каждого гражданина своей страны. Заходите сюда регулярно!
JamesToide · June 26, 2023 at 5:10 pm
серебро интернет магазин наложенным платежом
Robertdup · June 26, 2023 at 5:14 pm
Herkuttele parhaalla [url=https://killa-mini.bio/]kaikki valkoiset[/url] -kokemuksella valikoimastamme loytyvien laadukkaiden makujen avulla!
danovuteda · June 26, 2023 at 5:35 pm
На сайті https://www.mohantea.com.ua/ ви зможете ознайомитись з повним каталогом Цейлонського чаю Mohan, а також замовити його доставку. Купити чай з тонким ароматом та неповторним смаком дуже легко. Ознайомтеся з каталогом чаю та знижками для постійних клієнтів.
uzminSiz · June 26, 2023 at 6:03 pm
На сайте http://xn--e1afajie1bv.xn--p1ai/ вы сможете оформить заявку на то, чтобы приобрести в нужном объеме синтетические не окисленные полиэтиленовые воски при помощи каталитической деструкции полимеров. Предприятие «ХИМТЕК» считается производителем перечисленных веществ, а потому разработало свои авторские методики, а при производстве использует новаторские технологии, высокотехнологичное оборудование, которое позволяет создавать товары в любом количестве. Звоните по телефону и сделайте заказ прямо сейчас.
JamesToide · June 26, 2023 at 6:05 pm
момент серебряные украшения интернет магазин
Вера · June 26, 2023 at 6:47 pm
Полезная информация https://mobilecd.ru/ Мой Билайн: Как зарегистрироваться и войти в Личный кабинет. Чтобы иметь возможность проверить пополнение счета, наличие подключенных услуг, детализацию расходов или просмотреть новые тарифы.
JamesToide · June 26, 2023 at 6:59 pm
silver fly серебряные украшения купить в москве
vitskDeeni · June 26, 2023 at 7:06 pm
Сайт https://xn—–4-63dhdmqac0aa0aag4cybjmbfcf2adlt0y.xn--p1ai/ предлагает заказать увлекательные экскурсии по Санкт-Петербургу и погрузиться в его богатую историю, культуру и архитектуру. Опытные гиды интересно расскажут о самых интересных местах города. Разнообразные маршруты экскурсий дают возможность выбрать тур для самого искушенного путешественника.
JamesToide · June 26, 2023 at 7:52 pm
украшения ручной работы из натуральных камней купить
JamesToide · June 26, 2023 at 9:13 pm
серебро тайланда москва
bogdLap · June 26, 2023 at 10:57 pm
На сайте https://udostoverenie-po-elektrobezopasnosti.ru можно приобрести бланк удостоверения нового образца, который был создан в 2021 году. Здесь указаны технические характеристики, размеры, а также для каких случаев используется. Удостоверение применяется для учебных центров, предприятий, имеется вкладыш: 8 страниц для заполнения, а обложка создана из бумвинила. Если вы оформите заказ на этом сайте, то сможете рассчитывать на небольшую скидку. При этом стоимость удостоверения остается на среднем уровне.
bleezlabs.com · June 26, 2023 at 11:32 pm
This is an affiliate web-site, when you make a depoosit with a
casino we earn a commission.
Stop by myy page: bleezlabs.com
ikheesmurb · June 27, 2023 at 12:24 am
Сайт https://play.google.com/store/apps/details?id=com.cas1n0onl1ne.slotssevenma представляет собой приложение для Андройд. Начните играть в онлайн-казино прямо сейчас. На сайте присутствуют слоты, а также автоматы и многое другое. При этом доступны регулярные выплаты положенных средств. Перед вами огромный выбор интересных развлечений, которые помогут скрасить досуг. Начните зарабатывать большие деньги прямо сейчас и исполните свою мечту. И самое важное, что заведение никогда не обманывает, регулярно выплачивает средства, что подтверждают отзывы.
poverka_viess · June 27, 2023 at 1:44 am
Поверка счетчика воды в Москве – это обязательная процедура, необходимая для правильной работы системы водоснабжения. Наша компания предлагает профессиональную поверку счетчиков воды в Москве. Наши специалисты проведут полную диагностику счетчика, проверят его точность и проверят правильность установки. Мы предлагаем профессиональный и качественный сервис по доступным ценам. Закажите поверку счетчика воды у нас и мы гарантируем вам безопасность и качество выполненных работ.
https://stroy-service-pov.ru/
dmitriabula · June 27, 2023 at 1:50 am
На сайте https://inquisition.info/ почитайте интересные, свежие новости на различную тематику, в том числе, экономику, политику. Есть любопытные расследования, новые публикации, которые вызовут интерес у каждого. Имеется обзор различных автомобилей, а потому вы узнаете, какой из них точно стоит приобрести. Все статьи созданы лучшими авторами, которые умеют правильно преподнести информацию, чтобы она была интересна всем. Для того чтобы найти что-то определенное, забейте слово в специальный поиск.
http://esserp.com/bbs/board.php?bo_table=free&wr_id=47297 · June 27, 2023 at 2:45 am
On the other hand, the assistance group caan request you pass a KYC if they deem
iit important.
Visit my site: http://esserp.com/bbs/board.php?bo_table=free&wr_id=47297
blinovGip · June 27, 2023 at 2:58 am
На сайте https://www.crawler.pro/ вы сможете воспользоваться услугами лаборатории интернет-маркетинга. Компания находится на рынке более 15 лет и создала не одну сотню постов по маркетингу. Более 200 проектов велось, а также консультировалось. На портале вы найдете любопытный, интересный и содержательный контент на данную тему, что позволит лучше понять такой вопрос. Ознакомьтесь со списком всех проектов, которые находятся на этом сайте, чтобы иметь представление о работе специалиста. Вся информация интересная, увлекательная, а главное, что будет вам полезна.
sonofit · June 27, 2023 at 3:02 am
Today, I went to the beach front with my children.
I found a sea shell and gave it to my 4 year old daughter and said “You can hear the ocean if you put this to your ear.” She placed the shell to her ear and screamed.
There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is completely off topic
but I had to tell someone!
ogdanApasy · June 27, 2023 at 3:28 am
На сайте https://avtoimport-uae.ru/ вы сможете заказать доставку авто из ОАЭ. Подберем автомобиль, предложим лучшие условия, возьмем на себя все заботы по доставке и оформлению автомобиля без рисков и подводных камней. Также вы сможете ознакомиться с каталогом автомобилей из ОАЭ.
fotokniga_emaic · June 27, 2023 at 3:50 am
фотокнига купить https://fotoknigaservis.ru/samara/fotopechat/fotoknigi/
nikitkgrone · June 27, 2023 at 4:32 am
WebCam студия (агентство) https://pravda-models.com/ вакансия модели в твоем городе.
spravki-kupit.ru · June 27, 2023 at 5:29 am
медицинская справка 2023
level-26-tower · June 27, 2023 at 5:35 am
Usually I don’t read post on blogs, but I would like to say that this write-up very forced me to take a look at and do it!
Your writing style has been surprised me. Thank you, very nice post.
vitaliKax · June 27, 2023 at 6:26 am
На сайте https://xn—–2-63dbgqqarl3a5b6ahlbjojdjr7p.xn--p1ai/ можно заказать туры из Санкт-Петербурга по удивительным местам как в России, так и за её пределами. Недорогие туры и экскурсии из Санкт-Петербурга прекрасная возможность отлично провести время.
Richardchamy · June 27, 2023 at 8:26 am
картонные самосборные коробки белая
Richardchamy · June 27, 2023 at 8:44 am
изготовление упаковки из картона
orotkJen · June 27, 2023 at 8:48 am
Свежие новинки музыки, альбомы, новые песни популярных исполнителей, хиты вы сможете скачать или слушать онлайн без регистрации на сайте https://muzfo.net/ в отличном качестве. Скачать сборники хитов или новую музыку 2023 можно в один клик.
Robertagofs · June 27, 2023 at 8:54 am
играть в Cat Casino
Robertkeype · June 27, 2023 at 9:19 am
tadalafil cialis 5 mg tablet cialis pills 5 mg cialis original
Robertagofs · June 27, 2023 at 9:30 am
сайт Cat Casino
сервистелеком · June 27, 2023 at 9:36 am
[url=https://opticheskie-reflektometry.ru/]Сервис Телеком[/url]
ОБЩЕСТВО «Cервис Телевизором» — лицензированный оператор узы, типизирующийся на предоставлении телефонной узы для юридических и физических лиц. Услуги компании нацелены на яркий, средний да малый бизнес.
Сервис Телеком
Richardchamy · June 27, 2023 at 9:39 am
ласточкин хвост коробка схема
Електрика · June 27, 2023 at 9:46 am
[url=https://magazyn-elektryky.com.ua/]Магазин електрики[/url]
В ТЕЧЕНИЕ сучасному світі приставки не- относительныйійтися без електротоварів. Тому, якщо шукаєэти інтернет-магазин буква якісною електротехнічною продукцією, ви на наірному шляху.
Магазин електрики
Zaynempixelm · June 27, 2023 at 10:20 am
hop over to this site
Robertkeype · June 27, 2023 at 10:36 am
brand name cialis 20mg cialis generic cialis canada for sale
oltsovnex · June 27, 2023 at 11:37 am
На сайте https://profistrah.ru/ вы сможете воспользоваться любыми видами страхования, включая дом, машину, КАСКО, ОСАГО. На портале можно дополнительно воспользоваться и такими важными и полезными сервисами, как: КБМ, ДКП, кредитные карты, кредит и займы. Компанию «ПрофиCтрах» выбирают из-за того, что на сайте вы найдете экономные решения. При этом вы сэкономите как бюджет, так и время, оформив услугу на этом портале. Вся информация, в том числе, финансовые операции, защищены и не доступны третьим лицам.
Jimmyeffiz · June 27, 2023 at 11:49 am
https://wikipolicies.org/index.php/%C3%90%C2%A2%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%B0%C3%91%E2%82%AC%C3%91%E2%80%B9_%C3%90%E2%80%9D%C3%90%C2%BB%C3%91_%C3%90%C5%A1%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%C3%90%C2%BE%C3%91%E2%80%9A%C3%91%E2%80%B9_%C3%90%C5%93%C3%90%C2%B5%C3%90%C2%B4%C3%91%E2%80%9A%C3%90%C2%B5%C3%91%E2%80%A6%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%A2%C3%90%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%90%C2%B8%C3%90%C2%B1%C3%90%C2%B8%C3%91%E2%82%AC%C3%91%C3%90%C2%BA%C3%90%C2%B5
Richardpoers · June 27, 2023 at 11:50 am
http://liechtenstein.kragenstein.space/doku.php?id=%D0%BC%D0%B5%D0%B4%D0%B8%D1%86%D0%B8%D0%BD%D1%81%D0%BA%D0%BE%D0%B5_%D0%BE%D0%B1%D0%BE%D1%80%D1%83%D0%B4%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5_%D0%B8_%D0%BF%D1%80%D0%B8%D0%B1%D0%BE%D1%80%D1%8B
website · June 27, 2023 at 11:58 am
A single drawback is tht Amusnet and Playson slots
cannot be played with the bonus.
Look at my web-site :: website
Jimmyeffiz · June 27, 2023 at 12:02 pm
http://kb.nowlifestyle.com/index.php?title=6_%D0%94%D0%B8%D0%B0%D0%B3%D0%BD%D0%BE%D1%81%D1%82%D0%B8%D0%BA%D0%B0_-_%D0%AD%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%BE%D0%BA%D0%B0%D1%80%D0%B4%D0%B8%D0%BE%D0%B3%D1%80%D0%B0%D1%84%D1%8B_%D0%AD%D0%BD%D1%86%D0%B5%D1%84%D0%B0%D0%BB%D0%BE%D0%B3%D1%80%D0%B0%D1%84%D1%8B_%D0%AD%D0%BD%D0%B4%D0%BE%D1%81%D0%BA%D0%BE%D0%BF%D1%8B
Richardpoers · June 27, 2023 at 12:25 pm
https://ncsurobotics.org/wiki/index.php/User:EstelaVeale070
Ярослав · June 27, 2023 at 12:27 pm
Здравствуйте спасибо за информацию https://mosoblgazstroy.ru/ Личный кабинет АО «Мособлгаз» позволяет осуществлять управление услугами по поставке газа, техническому обслуживанию.
Robertkeype · June 27, 2023 at 12:57 pm
cialis tadalafil 10mg tablets cialis pills overnight tadalafil 5mg price in india
Richardpoers · June 27, 2023 at 1:01 pm
https://summeradde.se/cabview/index.php?title=User:JoshJni15867266
Jimmyeffiz · June 27, 2023 at 1:01 pm
https://trans.hiragana.jp/ruby/http://classicalmusicmp3freedownload.com/ja/index.php?title=%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B7%C3%90%C2%B2%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%9A%C3%90%C2%B5_%C3%90%C5%93%C3%90%C2%B5%C3%90%C2%B4%C3%91%E2%80%9A%C3%90%C2%B5%C3%91%E2%80%A6%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%BA%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B7%C3%90%C2%B2%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%B0%C2%B5%C3%91%E2%80%9A%C3%91%C3%91_%C3%90%E2%80%94%C3%90%C2%B0%C3%90%C2%BB%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%B0%C3%91_%C3%90%C2%A1%C3%91%C6%92%C3%90%C2%BC%C3%90%C2%BC%C3%90%C2%B0
스웨디시마사지 · June 27, 2023 at 1:12 pm
Aromathsrapy Massage is massage therapy with the added arokma of crucial oils to address distinct
requirements.
Feel free to surf to my homepage … 스웨디시마사지
homepage · June 27, 2023 at 1:12 pm
Free Bet will be awarded if users 1st eve settled money sportts bet is a loss.
My web site; homepage
Jimmyeffiz · June 27, 2023 at 1:12 pm
https://exterior.podemos.info/mediawiki/index.php?title=%C3%90%E2%80%9D%C3%90%C2%B0%C3%90%C2%BD%C3%90%C2%BD%C3%91%E2%80%B9%C3%90%C2%B9_%C3%90%C2%A4%C3%90%C2%B0%C3%90%C2%BA%C3%91%E2%80%9A_%C3%90%C5%BE%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%91%C5%92_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%B0%C3%90%C2%B6%C3%90%C2%B5%C3%90%C2%BD
edotoSah · June 27, 2023 at 1:26 pm
Сайт https://all-loans.kz/ это доска объявлений о кредитах и займах. Вы можете воспользоваться калькулятором, чтобы подобрать кредит или займ. Есть возможность добавить свое объявление. Срочный кредит в день обращения или кредит онлайн оформить на выгодных условиях очень просто.
Robertkeype · June 27, 2023 at 1:53 pm
brand name cialis 20mg cialis generic brand cialis with prescription
Robertkeype · June 27, 2023 at 2:46 pm
cialis 10mg pills cialis 10mg price cialis 20 mg price
agapoMut · June 27, 2023 at 2:58 pm
На сайте https://fullinvest.ru вы получите информацию, которая касается бинарных опционов. Так вы узнаете все о том, что собой представляют бинарные опционы, о терминологии. Имеется информация о том, с чего начать начинающему трейдеру, имеются и рекомендации от экспертов, которые хорошо разбираются в этом вопросе. Вы узнаете про самые эффективные методики, технические индикаторы. Имеются и свежие, реальные отзывы трейдеров, которые помогут получить представление о трейдинге. Перед вами есть и анализ графиков в режиме онлайн.
symbicort inhaler 160/4,5 mcg over the counter · June 27, 2023 at 3:16 pm
etodolac 200mg tablets etodolac nz etodolac 400 mg without a doctor prescription
Robertkeype · June 27, 2023 at 3:28 pm
cialis kaufen cialis pills india cialis 5 mg tablet price
JeremySam · June 27, 2023 at 3:37 pm
Где купить ок аккаунт и в чем их преимущество?
JeremySam · June 27, 2023 at 3:50 pm
Где купить качественные аккаунты TikTok
JeremySam · June 27, 2023 at 4:44 pm
Аккаунты Tik Tok. Купить учетные записи Tik Tok для продвижения и рекламы.
JeremySam · June 27, 2023 at 4:54 pm
Магазин аккаунтов соц. сетей – только качественные и проверенные учетные записи по выгодной цене
tolyarSoarm · June 27, 2023 at 5:13 pm
На сайте https://www.enerprom-spb.com/ вы сможете ознакомиться с компанией Энерпром, которая разрабатывает и производит промышленное гидравлическое оборудование. Собственная производственная площадка, огромный опыт в проектировании и изготовлении нестандартных заказов позволяют компании осуществлять самые сложные проекты от разработки до монтажа и ремонта.
Robertkeype · June 27, 2023 at 5:58 pm
cost of tadalafil 5mg cialis 10mg tablets price of tadalafil
fotokniga_emaic · June 27, 2023 at 6:37 pm
изготовление фотокниг http://fotoknigaservis.ru/novosibirsk/fotopechat/fotoknigi/
ozdnyopelp · June 27, 2023 at 8:42 pm
На сайте http://electrician-perm.ru оформите заявку для того, чтобы вызвать высококлассного и опытного электрика, который выполнит любые работы с использованием инновационного, высокотехнологичного инвентаря, необходимого инструмента. На все услуги предоставляются гарантии, установлены оптимальные расценки, а потому воспользоваться работами сможет каждый. Над каждым проектом трудятся квалифицированные, опытные специалисты, которые берутся даже за сложный проект, требующий сноровки.
drashosuh · June 27, 2023 at 9:18 pm
На сайте https://zamok-ok.ru/vskrytie-zamkov/ вы сможете оформить заявку для того, чтобы мастер приехал и вскрыл замок, независимо от уровня сложности. В компании действуют честные, актуальные расценки, чтобы воспользоваться услугой смогли все желающие. В компании работают компетентные, квалифицированные сотрудники, которые используют современный инвентарь, качественную технику, а работа происходит в круглосуточном режиме. Звоните по номеру, чтобы мастер прибыл в ближайшее время.
Олег · June 27, 2023 at 9:38 pm
Благодарим за предоставление информации https://edgov.ru/mfc-darovskoj.html МФЦ в Даровском, ул. Набережная, д. 8: официальный сайт, адрес, телефон, часы работы.
HKHAO45 · June 27, 2023 at 10:35 pm
Yes! Finally something about HKHAO45.
ntoshvex · June 27, 2023 at 10:37 pm
На сайте https://xn—–2-63dhdmqa6c9a2agkbhnidiq2o.xn--p1ai/ вы сможете заказать тур в Санкт-Петербург. Туры предлагают вам возможность посетить Эрмитаж, Царское Село, Петергоф и другие знаменитые места, погрузиться в уникальную атмосферу. Недорогие туру в Санкт-Петербург отличная возможность познакомиться с культурной столицей России.
XdatVeqqfinnagt · June 27, 2023 at 11:10 pm
This is the best [url=https://www.youtube.com/@sleep-music-relax/]Sleep Music[/url] channel.
riskaSyday · June 27, 2023 at 11:12 pm
Get ready to embark on the ultimate gaming adventure with casino review site https://15casino.site/ where thrill, excitement and untold riches await. an exceptional selection of games, cutting-edge technology and an addictive gameplay that keeps players coming back for more. Join us!
ysotsloalm · June 28, 2023 at 1:27 am
Сайт https://doskazaymov.kz/ поможет подобрать финансовую организацию или услугу для для получения кредита или займа на самых выгодных условиях. Сравнение процентных ставок и условий получения в одном месте. На сайте представлены как частные объявления, так и услуги организаций.
aslennWon · June 28, 2023 at 1:48 am
На сайте https://8o8.ru/ вы сможете раскрашивать любимые раскраски онлайн. Все раскраски, после рисования, вы сможете распечатать прямо с сайта или сохранить на устройство. Большой каталог позволяет выбрать раскраску как для детей, так и для взрослых. Увлекательное времяпрепровождение обеспечено!
refinans_rhymn · June 28, 2023 at 2:09 am
рефинансирование кредитов под залог имущества https://refinansirovanie-pod-zalog-msk.ru/
купить диплом автомеханика · June 28, 2023 at 2:10 am
Simply wish to say your article is as amazing. The clearness in your post is simply excellent and i can assume you are an expert on this subject. Well with your permission allow me to grab your RSS feed to keep up to date with forthcoming post. Thanks a million and please keep up the rewarding work.
kitchen refurbishment cost london · June 28, 2023 at 4:32 am
Have you ever thought about including a little bit more than just your articles?
I mean, what you say is fundamental and everything. Nevertheless just imagine if you added some
great photos or video clips to give your posts more, “pop”!
Your content is excellent but with pics and videos, this blog could definitely be one of the most beneficial in its
field. Great blog!
HarryIsoke · June 28, 2023 at 5:51 am
заработок для студентов
HarryIsoke · June 28, 2023 at 6:04 am
репетитор по английскому языку
gladkCheak · June 28, 2023 at 6:43 am
На сайте https://bigpicture.ru/ вы сможете изучить интересные, увлекательные новости в картинках. Они касаются самых разных сфер, включая кино, телевидение, фотографию, путешествия, туризм. Вы узнаете о самых красивых местах на планете и даже побываете в них. Каждая картинка сопровождается интересным текстом. Новые статьи вместе с фото появляются на портале постоянно, а потому заходите сюда ежедневно, чтобы получить новую порцию интересных сведений. Есть информация о том, как удивить девушку на первом свидании.
HarryIsoke · June 28, 2023 at 7:00 am
перевод с украинского языка на русский
HarryIsoke · June 28, 2023 at 7:10 am
репетитор по испанскому языку
5-minute meditation · June 28, 2023 at 8:26 am
It’s remarkable to visit this site and reading the views of all friends about this piece
of writing, while I am also eager of getting familiarity.
casino_Gox · June 28, 2023 at 8:54 am
топ казино онлайн
lyanovSmoky · June 28, 2023 at 9:11 am
https://klub-drug.ru/kak-nazvat-dochku-krasivye-imena-dlja-devochek/ вы сможете найти красивые имена для девочек. Как назвать дочку, вопрос интересующий многих. В статье вы сможете подобрать красивое и изысканное имя новорожденной девочки, а также узнать что означают эти имена.
HarryIsoke · June 28, 2023 at 9:18 am
реферат цена
alentibeall · June 28, 2023 at 9:54 am
На сайте https://xn——–5vecbidsseazob5ain2c6bgfobrnsdi0a2v4d.xn--p1ai/ вы сможете заказать туры в Карелию из Санкт-Петербурга. Туры в Карелию дают возможность увидеть и исследовать красоту озера Онежское, Кивач и множество других природных чудес. Недорогие туры в Карелию лучший способ отдохнуть от суеты города.
korotMus · June 28, 2023 at 10:21 am
Компания Витес https://vites-auto.ru/ – это старейшая сеть СТО в Самарской области, специализирующаяся на обслуживании европейских грузовиков (Iveco, Mercedez, Volvo, RVI). Преимуществами сервиса являются богатый опыт и квалификация персонала, наличие сертифицированного оборудования для ремонта (капремонт двигателя, КПП, геометрии кузова фур), собственный склад запчастей (оригиналы и качественные копии), официальная гарантия на работы и комплектующие. 22 года опыта негаражного ремонта продлят молодость любого тягача – приезжайте: Самара (ул. Земеца, 43) и Алексеевка (ул. Гагарина, 33).
evgenzergy · June 28, 2023 at 11:54 am
На сайте https://spravkivmsk.ru/ вы сможете воспользоваться компетентными и профессиональными услугами, связанными с проведением медицинских осмотров. Самое важное, что здесь нет очередей, ведь вы получите справку или пройдете медосмотр максимально оперативно. Документ выдается только после осмотра, официально. В этом учреждении действуют самые доступные расценки. К наиболее популярным услугам относят: справка от нарколога, для академического отпуска и для других целей. Вы получите ее в минимальные сроки, быстро и без лишних хлопот.
GeraldDed · June 28, 2023 at 12:18 pm
best price on cialis 20mg buy tadalafil cialis 5 mg for sale
GeraldDed · June 28, 2023 at 12:43 pm
cialis pills australia tadalafil brand cialis usa
GeraldDed · June 28, 2023 at 1:08 pm
cialis 5mg generic buy cialis pills low price
GeraldDed · June 28, 2023 at 1:35 pm
cialis 20 mg price in usa buy tadalafil cialis with dapoxetine sale
한국야동 · June 28, 2023 at 1:55 pm
What a fantastic post!
Is it okay I copy this and share it with my community members?
Have a look at my group! It’s about Korean 한국야동
If you are interested, feel free to visit my site and have a look.
Thank you and Keep up the nice work!
GeraldDed · June 28, 2023 at 2:01 pm
cialis 100mg uk buy tadalafil tadalafil online india
Williamval · June 28, 2023 at 2:24 pm
эссе онлайн
Williamval · June 28, 2023 at 2:37 pm
решение задач онлайн
yavtsesearo · June 28, 2023 at 2:48 pm
На сайте https://bigpicture.ru/ вы сможете ознакомиться с любопытными, интересными новостями, представленными в виде картинок. Так вы узнаете информацию на тему путешествий, фотографий, людей. Есть снимки забавных животных, которые никого не оставят равнодушным, подарят позитивные эмоции и яркие ощущения, а еще сделают ваш день более ярким, насыщенным, он начнется с нужной ноты. Есть забавные фото животных: собак, кошек, енотов. Есть и вовсе уникальные снимки. Каждая фотография сопровождается интересным текстом, который будет любопытно почитать каждому, чтобы расширить кругозор.
Williamval · June 28, 2023 at 3:34 pm
презентация к диплому
Williamval · June 28, 2023 at 3:44 pm
решение химических задач
emeevMaw · June 28, 2023 at 4:31 pm
На сайте https://fullinvest.ru имеется вся исчерпывающая информация о бинарных опционах. Вы узнаете о том, что это такое, чем будут полезны вам, о платформах и стратегиях, прогнозах, графиках. Имеется различный полезный контент, новые отзывы трейдеров, которые расскажут о подводных камнях. Почитайте контент, в котором есть советы, как вернуть средства у нечестного брокера. Материал точно будет полезен всем, кто как-то связан с такой темой. Есть раздел с особо полезными и важными статьями.
Anttidup · June 28, 2023 at 5:15 pm
Koe ainutlaatuinen ja voimakas [url=https://killapods.eu/product-tag/nikotiinipussit/]nikotiinipussit[/url] laajalla valikoimalla erilaisia makuja!
Teemudup · June 28, 2023 at 5:48 pm
Koe huippulaadukkaita [url=https://killapods.eu/fi/]white pouch[/url] tuotteita monilla erilaisilla mauilla ja vahvuuksilla!
OliverVep · June 28, 2023 at 5:55 pm
Dive into the exhilarating world of [url=https://killapods.eu/product-tag/Pablo-Snus/]Pablo Snus[/url]! Savor the bold flavors and unparalleled quality of Pablo Snus pouches, a must-have for every snus aficionado.
AllenPsymn · June 28, 2023 at 6:51 pm
На сайте https://v–nalichii.ru/ вы сможете найти, заказать и купить в наличии гидрооборудование пневмооборудование от крупнейших мировых производителей по лучшим ценам на рынке. Интернет магазин предлагает большой ассортимент товаров и оперативную доставку. В наличии всегда: гидрооборудование, пневмооборудование, гидромотор, гидронасос, гидрораспределитель, гидроклапан, блоки управления, гидроаппаратура для спецтехники, общемашиностроительные электромагниты и сотни других видов продукции.
sakharuite · June 28, 2023 at 7:09 pm
На сайте https://oazisurfo.ru/ вы сможете заказать светодиодное освещение для вашего загородного дома, коттеджа или иного объекта под ключ, а также заливку ледовых катков по индивидуальному проекту. Выполняем любые идеи и пожелания, профессионально занимаемся обслуживанием ледовых катков.
3d_jef · June 28, 2023 at 8:25 pm
3d печать в москве на заказ https://3d-pechati.ru/
AntonioSmema · June 28, 2023 at 9:01 pm
http://skazkademjanovo.ru/?post_type=topic&p=233466
WilliamRit · June 28, 2023 at 9:13 pm
https://kahkaham.net/read-blog/5782
AntonioSmema · June 28, 2023 at 9:13 pm
https://wiki.wogames.info/wiki/Купить_диплом_без_предоплаты
mikharaf · June 28, 2023 at 9:20 pm
На сайте https://xn——-73dhbcnclgac9aa6aag3ckj2bombkcf7adqt0wsc.xn--p1ai/ вы сможете заказать водные экскурсии по Санкт-Петербургу с гидами и экскурсоводами. Прогулки по Неве и каналам позволят вам насладится городом и интересными рассказами капитанов о каждом месте, которое вы посетите.
WilliamRit · June 28, 2023 at 9:40 pm
http://zarabotaem.bbmy.ru/viewtopic.php?id=2245#p3958
AntonioSmema · June 28, 2023 at 10:06 pm
http://anatoliyrud.ekafe.ru/viewtopic.php?f=29&t=1487
WilliamRit · June 28, 2023 at 10:07 pm
https://blacksocially.com/read-blog/139141
AntonioSmema · June 28, 2023 at 10:15 pm
http://kuvandyk.ru/message.php?msg=151
ilimonGutle · June 28, 2023 at 10:25 pm
На сайте https://stroish.ru/ вы найдете все, что понадобится настоящему садоводу или огороднику. На портале имеются фунгициды, препараты от вредителей, грунты и субстраты, пакетированные семена, стимуляторы роста растений. И самое главное, что все товары отборные, высокого качества и от ведущих производителей, которые знают, что предложить потребителю. Есть раздел с товарами, которые пользуются особой популярностью и доказали свою эффективность. С этим интернет-магазином вырастить культуры теперь очень просто.
AntonioSmema · June 29, 2023 at 12:15 am
https://heroes.app/blogs/317493/Купить-диплом-любой-квалификации-и-года-выпуска
AntonioSmema · June 29, 2023 at 1:18 am
http://www.sakhd.3nx.ru/viewtopic.php?p=1453#1453
AntonioSmema · June 29, 2023 at 1:29 am
https://zdsim.ru/wiki/index.php/Купить_диплом_любой_квалификации_и_года_выпуска
yaroszep · June 29, 2023 at 2:01 am
На сайте https://broker-control.com/ оставьте отзыв, если пользовались услугами компании «Брокер Контроль», которая специализируется не только на подборе добросовестного брокера, но и помогает вернуть средства, если вдруг вас обманул брокер-мошенник. Компетентные специалисты детально и очень внимательно изучают каждого кандидата, чтобы предоставить только актуальные, честные данные, исчерпывающую информацию. Происходит тщательная оценка деятельности брокеров, чтобы ваши средства всегда были в безопасности.
Juhodup · June 29, 2023 at 2:43 am
Koe erinomainen [url=https://killapods.eu/fi/product-category/nikotiinipussit/velo/]Velo Nikotiinipussit[/url] valikoima, joka tarjoaa monia makuja ja vahvuuksia!
Teemudup · June 29, 2023 at 2:51 am
Koe ainutlaatuinen [url=https://killapods.eu/fi/product-category/nikotiinipussit/iceberg/]Iceberg Nikotiinipussit[/url] valikoima, joka tarjoaa monipuolisia makuja ja vahvuuksia!
AntonioSmema · June 29, 2023 at 2:57 am
http://catalogue.bbok.ru/viewtopic.php?id=2841#p24638
yevgeQuafe · June 29, 2023 at 3:28 am
На сайте https://su48.ru/ вы сможете заказать строительство домов и коттеджей в Липецке, а также ознакомиться с большим каталогом готовых проектов домов и коттеджей. Компания оказывает широкий спектр строительных услуг от проектирования до юридического сопровождения и внутренней отделки. Оказываем помощь в получении ипотеки.
리플파워볼 · June 29, 2023 at 3:50 am
Your recipient will also receive aan e mail from Ticketmaster prompting
them to accept your tickets.
Take a look at my page … 리플파워볼
ukushRof · June 29, 2023 at 4:58 am
Центр психологической помощи Папоротник https://paporotnik.pro/ это лидеры в области психологической помощи. Вы можете получить профессиональную консультацию психологов – индивидуальную, детскую психологическую помощь, семейную. Все услуги оказываются психологами высшей категории. Наши знания и опыт помогут справиться с любой жизненной ситуацией.
spravki_rhymn · June 29, 2023 at 6:05 am
купить медицинскую справку https://spravki-medicina.ru/
Jareddal · June 29, 2023 at 6:37 am
куплю дом казань
Jareddal · June 29, 2023 at 6:50 am
жк дубравная казань официальный сайт
WilliamRit · June 29, 2023 at 7:14 am
http://srkians.getbb.org/viewtopic.php?f=52&t=14151
electronics · June 29, 2023 at 7:19 am
Hi there! Quick question that’s completely off topic.
Do you know how to make your site mobile friendly? My website looks weird when browsing from my iphone.
I’m trying to find a template or plugin that
might be able to resolve this problem. If you have any suggestions, please share.
Appreciate it!
Jareddal · June 29, 2023 at 7:40 am
казань продажа
Jareddal · June 29, 2023 at 7:48 am
продажа дома в казани
WilliamRit · June 29, 2023 at 8:04 am
https://biz.rusff.me/viewtopic.php?id=10587#p27619
Уборкаремонт · June 29, 2023 at 8:18 am
[url=https://uborka-posle-remonta-v-spb.ru/]Уборка после ремонта[/url]
Ремонт – не слабее этапный членение строительных услуг, чем самоё строительная деятельность. Снаружи подчиненности от того, экой широта также затраты требуется на электроремонт, остается одна хоботня – уборка после ремонта. Наша юкос расположена помочь вам один-другой уборкой через некоторое время ремонта в течение Санкт-Петербурге.
Уборка после ремонта
yushaZef · June 29, 2023 at 8:19 am
На сайте https://veganet.ru/ воспользуйтесь услугами популярной компании «Вега Нэт», которая имеет внушительный опыт в телекоммуникационной сфере. В компании работают настоящие профессионалы, которые подберут оптимальное решение. Вы сможете выбрать тариф «эконом», «интернет+ТВ», «частный дом». Среди дополнительных услуг выделяют: системы видеонаблюдения, домофония под ключ. Сотрудничество с этой компанией выбирают из-за того, что она обеспечивает бесперебойную сеть, безупречное качество обслуживания.
hapovDag · June 29, 2023 at 8:33 am
На сайте https://xn——-43dddfcrpfa0ba4aaf1cjjjwgonbgecgovdlhuc6z0c.xn--p1ai/ вы сможете заказать автобусные экскурсии по Санкт-Петербургу. На автобусных маршрутах от нашей компании вас ждут интересные и разнообразные маршруты. Автобусные экскурсии с гидами – возможность прекрасно провести время.
уборкакоттедж · June 29, 2023 at 8:34 am
[url=https://uborka-chastnyh-domov.ru/]Уборка коттеджей[/url]
Ты да я оказываем услугу числом уборке коттеджей для наших клиентов. Чтобы забронировать уборку, Ваша милость можете подать заявку сверху нашем сайте чи связаться с нами по телефону.
Уборка коттеджей
arkincom · June 29, 2023 at 8:50 am
На сайте https://zamok-ok.ru/vskrytie-zamkov/ оформите заявку, чтобы воспользоваться услугой по вскрытию замков. Только для вас честные, актуальные расценки, работают компетентные, опытные сотрудники, которые используют в своей работе проверенное и надежное оборудование, уникальные технологии. И самое важное, что замок будет вскрыт даже без незначительных деформаций. А если ваш замок окончательно сломан, то с собой у мастера обязательно будет новый. Работа происходит в круглосуточном режиме и по привлекательной цене.
nyazAnaks · June 29, 2023 at 8:51 am
На сайте https://xakers.ru/topic/282/page-11?gg=1 воспользуйтесь профессиональными и качественными услугами хакеров, программистов, организуйте взлом, тайную слежку. Каждый специалист, который находится на этом сайте, проходит специальную проверку на соответствие, а потому к нему можно обратиться, не опасаясь. Он выполнит работы на профессиональном уровне и максимально грамотно, а самое главное, что в установленные сроки. Если вам необходимо взломать почту или узнать пароли, то скорей обращайтесь к специалисту.
바카라 · June 29, 2023 at 10:32 am
Speaking of betting techniques, on line roulette is
a terrific settng to give them a spin, if you will.
My webb blog – 바카라
vasenPraip · June 29, 2023 at 11:26 am
Сайт https://play.google.com/store/apps/details?id=com.cas1n0onl1ne.slotssevenma представляет собой приложение, на котором находятся слоты, автоматы. Все это помогает разнообразить досуг, а заодно еще и заработать немного денег на своем хобби. Это приложение мгновенно выплачивает средства, если вы их выиграете. О порядочности свидетельствует огромное количество положительных отзывов. А потому попытать свою удачу сможете и вы. Заходить на портал можно в любое, наиболее удобное время.
каталог фаберлик · June 29, 2023 at 11:41 am
каталог фаберлик
nosovrat · June 29, 2023 at 12:51 pm
Термофлекс-Юг https://termoflexug.ru/ осуществляет флексопечать и цифровую печать самоклеящейся этикетки на воды, квас, лимонады, пиво, мед, крупы, растительное масло и т.д. Тиражи от 1000 шт. Сроки 7-14 дней. Доставка по РФ за наш счет. Используем качественные материалы по доступным ценам: бумага/плёнка и УФ-краски. Печатаем на брендовом надёжном оборудовании, опытные менеджеры и дизайнеры, способные выполнить любой заказ – это залог красочной продающей этикетки для Вас. Звоните – 8 800 700 98 19, дадим скидку от объема. На рынке более 14 лет.
Robertdup · June 29, 2023 at 2:00 pm
Indulge in the ultimate best [url=https://velo1.ink/]all white snus[/url] experience with our premium collection of flavors!
Robertdup · June 29, 2023 at 2:00 pm
Indulge in the ultimate best [url=https://velo1.ink/]tobacco-free snus[/url] experience with our premium collection of flavors!
Robertdup · June 29, 2023 at 2:16 pm
Indulge in the ultimate best [url=https://velo1.ink/]strong nicotine pouches[/url] experience with our premium collection of flavors!
Robertdup · June 29, 2023 at 2:22 pm
Nauti parhaasta [url=https://velo1.ink/]voimakas nikotiini[/url] -kokemuksesta laadukkaalla makukokoelmallamme!
Robertdup · June 29, 2023 at 2:28 pm
Anna periksi parhaalle [url=https://velo1.ink/]nuuska tupakaton[/url] -elamykselle valikoimamme ylellisten makujen kanssa!
Robertdup · June 29, 2023 at 2:38 pm
Hemmottele itseasi parhaalla [url=https://velo1.ink/]Pablo Nuuska[/url] -kokemuksella valikoimassamme ylellisia makuja!
Jareddal · June 29, 2023 at 2:50 pm
жк острова казань официальный сайт
Robertdup · June 29, 2023 at 2:58 pm
Tauchen Sie ein in das ultimative [url=https://velo1.ink/]velo snus kaufen[/url] Erlebnis mit unserer hochwertigen Geschmackskollektion!
Robertdup · June 29, 2023 at 3:19 pm
Nauti parhaasta [url=https://velo1.ink/]velo nikotiinipussit[/url] -kokemuksesta laadukkaan makukokoelmamme avulla!
hevtsonaiva · June 29, 2023 at 3:25 pm
Сайт https://vip-samara.com/ это создание качественных сайтов, продвижение и поддержка ваших проектов. Заказать сайт в Самаре или получить консультацию по продвижению очень просто. Вы сможете ознакомиться с примерами работ или получить квалифицированную помощь технических специалистов. Услуги веб студии это разработка уникального дизайна, создание функциональных и удобных сайтов любой сложности, а также продвижение сайтов в поисковых системах.
Robertdup · June 29, 2023 at 3:27 pm
Nauti parhaasta [url=https://pouches.killapods.de/]killa nikotiinipussit[/url] -kokemuksesta laadukkaan makukokoelmamme avulla!
JamesPrags · June 29, 2023 at 4:02 pm
сео продвижение сайтов заказать
kiryutok · June 29, 2023 at 4:11 pm
На сайте https://o-savva.ru/ получится заказать подъемники для инвалидов самой разной модификации. Заявки на покупку принимаются круглосуточно, а потому оформить приобретение можно в любое время. Компания в течение длительного времени создает электрические подъемники, которые максимально адаптированы под нужды, бытовые условия людей. В процессе разработки участвовали те, кто сам пережил серьезные травмы позвоночника. На портале вы сможете выбрать и приобрести такое оборудование, которое облегчит ваш ежедневный быт.
Jetta · June 29, 2023 at 4:11 pm
Beneficial content, Appreciate it!
JamesPrags · June 29, 2023 at 4:15 pm
seo оптимизация раскрутка сайта
JamesEmido · June 29, 2023 at 4:57 pm
арматура 8мм цена за 1 метр
JamesPrags · June 29, 2023 at 5:03 pm
интернет продвижение сайта
JamesPrags · June 29, 2023 at 5:11 pm
поисковая оптимизация и продвижение
JamesEmido · June 29, 2023 at 5:41 pm
https://vodoley66.ru/
ndreevDrelp · June 29, 2023 at 7:12 pm
На сайте http://ltd-electromotor.ru/ вы сможете заказать такое оборудование отечественных и зарубежных производителей, как: общепромышленные электродвигатели, насосное оборудование, насосы, вентиляционное оборудование и многое другое по доступным ценам. Вся продукция надежная, практичная, отличается высоким качеством и долгим сроком эксплуатации. Если затрудняетесь с выбором, то воспользуйтесь помощью специалистов. Для того чтобы ознакомиться со всем ассортиментом, скачайте прайс-лист, где присутствуют все расценки.
kostistups · June 29, 2023 at 7:35 pm
DNSis – сайт https://dnsis.ru/ позволяющий быстро и бесплатно проверить решение упражнений по основным предметам курса средней школы. Из плюсов – удобная навигация и поиск, лаконичный дизайн, выверенные ответы и ход решения, присутствуют все популярные учебники последних изданий. Вы найдёте более 120 учебников и рабочих тетрадей, а кроме того статьи, лайфхаки и полезные советы по организации своей жизни в школе. ГДЗ – это способ проверить правильность своей логики решения, пользуйтесь решебниками только после самостоятельного выполнения упражнений, чтобы расти интеллектуально.
JamesPrags · June 29, 2023 at 7:46 pm
продвижение оптимизация сайта
Бульрное издание "Русофобкая помойка" · June 29, 2023 at 7:47 pm
Бульрное издание “Русофобкая помойка”
JamesPrags · June 29, 2023 at 7:54 pm
заказать сео сайт
JamesEmido · June 29, 2023 at 8:05 pm
арматура 12 мм цена за тонну
오피 · June 29, 2023 at 8:45 pm
Hi there everyone, it’s my first visit at this site, and
piece of writing is really fruitful for me, keep up posting these
types of articles.
신용대출 · June 29, 2023 at 8:48 pm
There are no specdific prohibitions on the use of Upgrade
loans other than those currently imposed by law.
My homepage; 신용대출
JamesPrags · June 29, 2023 at 9:03 pm
продвижение сайтов сео
Les · June 29, 2023 at 9:25 pm
Lovely posts, Appreciate it!
대출 고래 · June 29, 2023 at 10:08 pm
Aquick-term loan benefits most borrowers as they want to reay it promptly.
my web site – 대출 고래
RickNuh · June 29, 2023 at 11:04 pm
Основную массу людей зыблет такая тематика, как https://desisandook.in/2019/05/28/hello-world/#comment-292324
Jamessergo · June 29, 2023 at 11:13 pm
cheap cialis tadalafil online site cialis generic
vyalobew · June 30, 2023 at 12:06 am
На сайте https://armand-sto.ru/ вы сможете заказать такие услуги, как диагностика, ремонт турбин, трансмиссии, двигателя, ходовой, топливной системы. В компании работают квалифицированные и высококлассные специалисты, которые точно знают, как решить вопрос быстро, эффективно и с максимальной экономией бюджета. Все услуги оказываются на высокоточном, инновационном оборудовании, которое помогает дополнительно продлить эксплуатационные сроки, улучшить технические характеристики.
신용대출 · June 30, 2023 at 12:27 am
Plus, if you fail to makke the typical payments your credit score could decline even further.
my blog :: 신용대출
Jamessergo · June 30, 2023 at 12:55 am
cialis 20mg uk best way to take tadalafil cialis 10mg sale
viridoraw · June 30, 2023 at 1:18 am
If you’re seeking Linktree alternatives, consider Taplink for customizable landing pages, Beacons for enhanced engagement, Shorby for advanced analytics and retargeting, and Carrd for versatile one-page websites. Each option offers unique features to meet your specific needs and elevate your online presence. Choose the one that aligns best with your goals and create a streamlined experience for your audience. Full review at the link https://linktree-alternative.com/
nikitkCew · June 30, 2023 at 3:05 am
На сайте https://blamers.ru закажите звонок для того, чтобы записаться на услуги по обслуживанию, ремонту, диагностике Мерседеса. Здесь же можно приобрести и все необходимые запчасти. Специально для вас действует уникальная услуга – профессиональная консультация мастера-приемщика. Он дополнительно сориентирует и по цене. В настоящий момент можете воспользоваться бесплатной диагностикой подвески. Для работы используется инновационное и высокотехнологичное оборудование, которое позволяет добиться необходимого результата.
대출고래 · June 30, 2023 at 4:47 am
As a outcome, your chances of ending uup with a mountain of
unforeseen debts are mitigated.
my blog – 대출고래
Dom_crelt · June 30, 2023 at 4:48 am
казань строительство http://vavilon43.ru
hmeleBAB · June 30, 2023 at 5:30 am
На сайте https://cbb.ru/ вы сможете пройти курсы фитнес-тренера, а также профессионального инструктора. После обучения выдаются дипломы об окончании государственного образца. В настоящий момент несколько тысяч выпускников работают по специальности и имеют хорошую зарплату. Причем они осуществляют свою деятельность не только по России, но и за рубежом. Вы тоже сможете получить перспективную специальность прямо сейчас и заняться любимым делом. Обучение проходит по удобному графику и тогда, когда вам удобно.
Jamessergo · June 30, 2023 at 6:18 am
cialis 20mg india price online tadalafil canada cialis 20mg tablets prices
bogdaPer · June 30, 2023 at 6:31 am
Инокснао https://inoxnao.ru/ – оптово-розничная база нержавеющей стали в Самарской области. Осуществляем продажу металлопроката лучших марок (AISI 201, AISI 304, AISI 316, AISI 321, AISI 430). В наличии все виды изделий для строительства и промышленности – от листового и сортового проката до труб и отводов. Оптовая цена от 50 тыс. руб., бесплатная доставка оптовикам. Поможем подобрать стальные изделия под Ваши задачи. Широкий ассортимент горячего и холодного проката, все популярные типы поверхностной обработки.
natoliled · June 30, 2023 at 7:55 am
На сайте https://ruchkin.ru/ вы сможете заказать производство сувенирной продукции – шариковых ручек с логотипом. Вся продукция выглядит презентабельной, она качественная и не утратит своего внешнего вида. На каждом этапе производства контроль качества продукции. Это позволяет исключить возможность получения брака. Если появились вопросы, то задайте их службе поддержки, где вам ответят на них, помогут разрешить ситуацию. Услуга обойдется недорого. Любой заказ выполняется в минимальные сроки.
ArnoldDed · June 30, 2023 at 9:09 am
Советы где купить прокси на этом форуме помогут вам сделать правильный выбор.
ArnoldDed · June 30, 2023 at 9:22 am
Explore the myriad benefits associated with the use of a Proxy Server in this resource.
Michaelcog · June 30, 2023 at 9:34 am
https://forum.unrivaled.ro/index.php?/gallery/image/79-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D1%8B-%D0%BE-%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8-%D0%B1%D0%B5%D0%BB%D1%8B%D0%B9-%D1%8F%D1%80/
Robertdup · June 30, 2023 at 9:37 am
Indulge in the ultimate best [url=https://velo1.live/]velo snus[/url] experience with our premium collection of flavors!
Robertdup · June 30, 2023 at 9:42 am
Indulge in the ultimate best [url=https://velo1.live/]velo 4 mg[/url] experience with our premium collection of flavors!
Robertdup · June 30, 2023 at 10:06 am
Indulge in the ultimate best [url=https://velo1.live/]zyn vs velo[/url] experience with our premium collection of flavors!
Robertdup · June 30, 2023 at 10:13 am
Indulge in the ultimate best [url=https://velo1.live/]best velo snus[/url] experience with our premium collection of flavors!
Robertdup · June 30, 2023 at 10:15 am
Indulge in the ultimate best [url=https://velo1.live/]velo nic pouches[/url] experience with our premium collection of flavors!
Michaelcog · June 30, 2023 at 10:23 am
http://l67697qa.beget.tech/2023/06/12/realizuyte-svoi-professionalnye-celi-kupite-diplom-mgnovenno.html
Robertdup · June 30, 2023 at 10:24 am
Indulge in the ultimate best [url=https://velo1.live/]velo snus buy[/url] experience with our premium collection of flavors!
Jamessergo · June 30, 2023 at 11:06 am
cialis 20mg for sale best place to buy tadalafil online order cialis
Michaelcog · June 30, 2023 at 11:12 am
http://volgograd03.2bb.ru/post.php?fid=28
먹튀검증 · June 30, 2023 at 11:55 am
Howdy! This article could not be written any better!
Going through this post reminds me of my previous roommate!
He constantly kept preaching about this. I will forward this information to
him. Pretty sure he will have a great read. I appreciate you for sharing!
Michaelcog · June 30, 2023 at 12:00 pm
http://www.musichunt.pro/blogs/view.htm?id=71761
Michaelcog · June 30, 2023 at 12:49 pm
https://бытоваЯхимиЯоптом.рф/communication/forum/messages/forum5/message11527/11307-kupit-diplom?result=new#message11527
Josephzot · June 30, 2023 at 1:05 pm
https://meffert-yar.ru/
Jamessergo · June 30, 2023 at 1:11 pm
cialis 5 mg for sale cialis with prescription online cialis price
Michaelcog · June 30, 2023 at 1:36 pm
https://rentry.co/7ri58
Michaelcog · June 30, 2023 at 2:23 pm
http://firehunters.ru/blogs/1/originalnyy-diplom-na-ofitsialnom-blanke-voskresenskoe.php
Michaelcog · June 30, 2023 at 3:11 pm
https://0xbt.net/blog/view/19618470/купить-документы-об-образовании
rezhaZek · June 30, 2023 at 3:50 pm
На сайте http://flashner.ru/ закажите брендированные пластиковые, металлические флешки, а также внешние аккумуляторы. Обязательно ознакомьтесь с топом продаж – товарами, которые пользуются особой популярностью среди покупателей. Рекламная продукция создается максимально оперативно и в соответствии с самыми жесткими требованиями. Именно поэтому в качестве можете не сомневаться. Поставки продукции напрямую, что позволяет избежать наценок. Оперативная доставка в любой регион. Качество товара проверяется на каждом этапе производства.
Jamessergo · June 30, 2023 at 3:56 pm
cialis 10mg tablets when will cialis become generic cost of cialis at walmart
Michaelcog · June 30, 2023 at 3:56 pm
https://forum.ostroyke.com.ua/threads/%D0%9F%D0%BE%D0%B4%D0%BB%D0%B8%D0%BD%D0%BD%D1%8B%D0%B9-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC-%D0%BE-%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8-%D0%9B%D0%B8%D1%85%D0%BE%D1%81%D0%BB%D0%B0%D0%B2%D0%BB%D1%8C.20643/
Michaelcog · June 30, 2023 at 4:43 pm
http://school37slr.bestbb.ru/viewtopic.php?id=138
Jamessergo · June 30, 2023 at 5:52 pm
tadalafil cialis from india tadalafil citrate brand cialis usa
chictota_jef · June 30, 2023 at 7:59 pm
как отстирать кофе https://mschictota.ru/
Jamessergo · June 30, 2023 at 8:12 pm
cialis 100mg uk cialis pricing cialis tab 20mg
WalterTep · June 30, 2023 at 8:46 pm
профильные трубы
hakovpiova · June 30, 2023 at 8:56 pm
Сайт https://bongacams.cash/ представляет собой популярный магазин аккаунтов, токенов. Здесь вы сможете приобрести все, что пожелаете и по привлекательной стоимости. Перед вами есть и такие аккаунты, баланс которых до 2000. 1 токен равен 1 рублю. При желании можно выбрать и премиальные аккаунты. Обязательно оставляйте свои отзывы, комментарии, делитесь впечатлениями от работы сайта и публикуйте свое мнение, делитесь с ним с друзьями. И самое главное, что портал работает бесперебойно, а потому совершить покупку можно в любое время.
WalterTep · June 30, 2023 at 9:26 pm
профильная труба размеры
WalterTep · June 30, 2023 at 9:58 pm
труба профильная 80*80
WalterTep · June 30, 2023 at 10:29 pm
профильная труба 20х20
WalterTep · June 30, 2023 at 11:01 pm
профильная труба 40х40
WalterTep · June 30, 2023 at 11:32 pm
заглушка для профильной трубы
yuyevmep · June 30, 2023 at 11:41 pm
На сайте https://usinsk1.ru/ почитайте интересные, актуальные новости Усинска. На этом портале вы узнаете только новые, свежие данные, которые будут интересны всем жителям этого города. Есть колонка, в которой обсуждается материал на тему машин. Имеется рубрика «Интересные статьи», которые касаются туристической тематики, где оставляют свое мнение те, кто слетали в различные страны. На портале имеются и интересные, любопытные статьи на различную тему: еда, животные, разное, техника, имущество.
Jamessergo · July 1, 2023 at 12:00 am
cialis 20mg australia generic cialis cost cialis 10mg pill
WalterTep · July 1, 2023 at 12:04 am
https://ivmetall37.ru/
Jamessergo · July 1, 2023 at 1:39 am
cialis tadalafil 20mg tadalafil 10mg tadalafil 40 mg for sale
buspar 5 mg pills · July 1, 2023 at 4:32 am
zocor 40 mg online pharmacy zocor without a prescription zocor for sale
JamesFloge · July 1, 2023 at 5:39 am
фиксаторы арматуры
JamesFloge · July 1, 2023 at 5:52 am
трубопроводная арматура
JamesFloge · July 1, 2023 at 6:44 am
https://a4-tech.ru/
ndryubrada · July 1, 2023 at 7:35 am
На сайте https://pro-parketi.ru/parket-works/vosstanovlenie-remont-parketa/ciklevka-parketa/ заполните форму для того, чтобы воспользоваться такой важной услугой, как циклевка паркета «под ключ». На выполнение всех работ потребуется не более одного дня. На них предоставляются гарантии – 3 года. Услуга оказывается без пыли, мусора, мебель выносится за вас. В работе применяются экологически безопасные материалы, которые не имеют запаха. Каждый клиент сможет рассчитывать на безупречный результат, высококлассный уровень обслуживания.
https://londonhousedoctor.com · July 1, 2023 at 7:54 am
Quality articles or reviews is the key to attract the viewers to visit the web site, that’s what this website is providing.
Jamessergo · July 1, 2023 at 8:05 am
cialis 10mg pills tadalafil side effects best price on cialis
уборкаофис · July 1, 2023 at 8:38 am
[url=https://uborka-ofisa-zakazat.ru/]Уборка Офиса[/url]
Покупатели в течение Санкт-петербурге, нуждающиеся в течение обслуживании по ежедневной уборке кабинетов, могут превратиться за проф через к нескольким компаниям. Этто что ль гнездиться клининговая служба, кок спознается с Вами числом телефонному аппарату, чтоб открыть заявку.
Уборка Офиса
آگهیهای استخدام های کرج · July 1, 2023 at 9:35 am
Howdy! This article couldn’t be written any better!
Going through this post reminds me of my previous roommate!
He always kept preaching about this. I’ll send this post to him.
Fairly certain he’s going to have a great read. I appreciate you for sharing!
bassein_crelt · July 1, 2023 at 10:04 am
справка в бассейн https://spravki-bassein.ru/
Jamessergo · July 1, 2023 at 10:24 am
rx cialis prices cialis for sale cialis price us pharmacy
Melvinprame · July 1, 2023 at 10:26 am
аварийное оборудование
파워볼게임 · July 1, 2023 at 11:01 am
When looking to have some enjoyable with the lottery, you want lottery spot that is safe and reliable.
my web-site: 파워볼게임
Melvinprame · July 1, 2023 at 11:07 am
аварийное оборудование
StephenPen · July 1, 2023 at 1:22 pm
бухгалтерские услуги
Jamessergo · July 1, 2023 at 1:43 pm
generic tadalafil 20mg india cialis pricing cialis generic
RichardHoish · July 1, 2023 at 1:52 pm
Welcome to Big Big News (BBN), your go-to source for the latest and most engaging news from around the world. At BBN, we strive to deliver breaking news, captivating stories, and in-depth analysis that keep you informed and connected to the ever-changing events shaping our world.
As a trusted news website, we pride ourselves on delivering accurate and reliable information across a wide range of topics. Whether you’re interested in politics, business, technology, health, entertainment, sports, or more, BBN has got you covered. Our dedicated team of experienced journalists and writers work tirelessly to bring you well-researched articles that provide comprehensive coverage and insightful perspectives.
With BBN, you’ll stay ahead of the curve with our up-to-the-minute reporting on current events and global happenings. Our commitment to delivering quality journalism means you can rely on us for accurate, balanced, and unbiased news coverage. We strive to present information in a clear and concise manner, ensuring that you can easily grasp the key facts and understand the context behind the headlines.
In addition to news articles, BBN offers thought-provoking opinion pieces, engaging features, and in-depth investigative reporting. Our goal is to provide you with a rich and diverse news experience that goes beyond the surface, sparking meaningful discussions and fostering a deeper understanding of the world around us.
Whether you’re an avid news reader, a curious mind, or a professional seeking valuable insights, BBN is your one-stop destination. Join our growing community of readers and stay informed, empowered, and inspired. Explore our website, sign up for our newsletter, and follow us on social media to never miss a beat.
Big Big News (BBN) – Where news comes alive!
opinion
Гей клуб VDSINA · July 1, 2023 at 2:03 pm
Гей клуб VDSINA
RichardHoish · July 1, 2023 at 2:03 pm
Welcome to Big Big News (BBN), your go-to source for the latest and most engaging news from around the world. At BBN, we strive to deliver breaking news, captivating stories, and in-depth analysis that keep you informed and connected to the ever-changing events shaping our world.
As a trusted news website, we pride ourselves on delivering accurate and reliable information across a wide range of topics. Whether you’re interested in politics, business, technology, health, entertainment, sports, or more, BBN has got you covered. Our dedicated team of experienced journalists and writers work tirelessly to bring you well-researched articles that provide comprehensive coverage and insightful perspectives.
With BBN, you’ll stay ahead of the curve with our up-to-the-minute reporting on current events and global happenings. Our commitment to delivering quality journalism means you can rely on us for accurate, balanced, and unbiased news coverage. We strive to present information in a clear and concise manner, ensuring that you can easily grasp the key facts and understand the context behind the headlines.
In addition to news articles, BBN offers thought-provoking opinion pieces, engaging features, and in-depth investigative reporting. Our goal is to provide you with a rich and diverse news experience that goes beyond the surface, sparking meaningful discussions and fostering a deeper understanding of the world around us.
Whether you’re an avid news reader, a curious mind, or a professional seeking valuable insights, BBN is your one-stop destination. Join our growing community of readers and stay informed, empowered, and inspired. Explore our website, sign up for our newsletter, and follow us on social media to never miss a beat.
Big Big News (BBN) – Where news comes alive!
lifestyle
Westonempixelm · July 1, 2023 at 2:26 pm
look at more info
RichardHoish · July 1, 2023 at 2:47 pm
Welcome to Big Big News (BBN), your go-to source for the latest and most engaging news from around the world. At BBN, we strive to deliver breaking news, captivating stories, and in-depth analysis that keep you informed and connected to the ever-changing events shaping our world.
As a trusted news website, we pride ourselves on delivering accurate and reliable information across a wide range of topics. Whether you’re interested in politics, business, technology, health, entertainment, sports, or more, BBN has got you covered. Our dedicated team of experienced journalists and writers work tirelessly to bring you well-researched articles that provide comprehensive coverage and insightful perspectives.
With BBN, you’ll stay ahead of the curve with our up-to-the-minute reporting on current events and global happenings. Our commitment to delivering quality journalism means you can rely on us for accurate, balanced, and unbiased news coverage. We strive to present information in a clear and concise manner, ensuring that you can easily grasp the key facts and understand the context behind the headlines.
In addition to news articles, BBN offers thought-provoking opinion pieces, engaging features, and in-depth investigative reporting. Our goal is to provide you with a rich and diverse news experience that goes beyond the surface, sparking meaningful discussions and fostering a deeper understanding of the world around us.
Whether you’re an avid news reader, a curious mind, or a professional seeking valuable insights, BBN is your one-stop destination. Join our growing community of readers and stay informed, empowered, and inspired. Explore our website, sign up for our newsletter, and follow us on social media to never miss a beat.
Big Big News (BBN) – Where news comes alive!
health and wellness
RichardHoish · July 1, 2023 at 2:55 pm
Welcome to Big Big News (BBN), your go-to source for the latest and most engaging news from around the world. At BBN, we strive to deliver breaking news, captivating stories, and in-depth analysis that keep you informed and connected to the ever-changing events shaping our world.
As a trusted news website, we pride ourselves on delivering accurate and reliable information across a wide range of topics. Whether you’re interested in politics, business, technology, health, entertainment, sports, or more, BBN has got you covered. Our dedicated team of experienced journalists and writers work tirelessly to bring you well-researched articles that provide comprehensive coverage and insightful perspectives.
With BBN, you’ll stay ahead of the curve with our up-to-the-minute reporting on current events and global happenings. Our commitment to delivering quality journalism means you can rely on us for accurate, balanced, and unbiased news coverage. We strive to present information in a clear and concise manner, ensuring that you can easily grasp the key facts and understand the context behind the headlines.
In addition to news articles, BBN offers thought-provoking opinion pieces, engaging features, and in-depth investigative reporting. Our goal is to provide you with a rich and diverse news experience that goes beyond the surface, sparking meaningful discussions and fostering a deeper understanding of the world around us.
Whether you’re an avid news reader, a curious mind, or a professional seeking valuable insights, BBN is your one-stop destination. Join our growing community of readers and stay informed, empowered, and inspired. Explore our website, sign up for our newsletter, and follow us on social media to never miss a beat.
Big Big News (BBN) – Where news comes alive!
travel
kochemah · July 1, 2023 at 2:55 pm
На сайте https://neramsc.ru/ вы сможете приобрести интерактивные, профессиональные панели, интерактивные доски, столы и многое другое напрямую от производителя. Есть раздел с самыми популярными категориями товаров, которые приобретают чаще остальных. А есть раздел с рекомендованной администрацией продукцией. Ее покупают в различные детские, образовательные учреждения. Регулярно на портале появляются новинки, которые обязательно вас заинтересуют. Компания занимается, в том числе, комплексными поставками оборудования.
kryukFut · July 1, 2023 at 3:43 pm
На сайте https://redico.ru/ закажите бесплатный расчет стоимости разрешительной документации, независимо от сложности. Компания предоставляет высокий уровень сервиса, ответственно подходит к исполнению каждого заказа. Компетентные сотрудники готовы предоставить все необходимые документы в максимально сжатые сроки, а при получении не будет никакого дискомфорта. Компания подходит к обязанностям максимально ответственно, сотрудничество на прозрачных условиях. Она находится на рынке давно, поэтому все работы будут выполнены грамотно.
Jamessergo · July 1, 2023 at 3:46 pm
online purchase of tadalafil in india tadalafil goodrx cialis price generic
vanecjipsy · July 1, 2023 at 5:19 pm
На сайте https://takerm.ru поиграйте в интересные игры, а также топовые слоты, которые точно никого не оставят равнодушным. Перед вами лучшие игры от проверенных и зарекомендовавших себя провайдеров. Они поставляют только развлечения хорошего качества. Есть специальный фильтр, который позволит отыскать игру, которая понравится вам больше всего. Этот портал опубликован в различных социальных сетях. Есть возможность пополнить либо вывести средства. Воспользуйтесь специальным фильтром для того, чтобы найти ту игру, которая обязательно вас заинтересует.
Mikkodup · July 1, 2023 at 5:32 pm
Syvenny parhaaseen [url=https://velo1.live/]velo snus preis[/url] kokemukseen premium-valikoimamme avulla!
volodhip · July 1, 2023 at 5:33 pm
Лучший хостинг сайтов на https://prohoster.info/ На сайте вы сможете купить сервер для сайта и надежный хостинг. Хостинг для страниц от прохостер это выгодные цены, круглосуточная поддержка, онлайн хостинг и уникальные предложения.
yezhoutine · July 1, 2023 at 5:35 pm
На сайте https://vgolos.info/ имеются актуальные, последние новости, посвященные политике, экономике, жизни и другим сферам, которые интересны каждому. Также есть и криминальные хроники, материал, посвященный высоким технологиям, интервью популярных личностей, предпринимателей. Опубликованы и хроники военной операции, что позволит лучше сориентироваться в обстановке. Постоянно выкладываются новые статьи, которые помогут лучше разобраться в ситуации. Почитайте те новости, которые наиболее интересны вам.
RobertCex · July 1, 2023 at 5:47 pm
Genie?en Sie das ultimative [url=https://velo1.live/]velo freeze pris[/url] Erlebnis mit unserer Premium-Auswahl an Geschmacksrichtungen!
HeinrichHic · July 1, 2023 at 5:53 pm
Erleben Sie das ultimative [url=https://velo1.live/]velo nikotingehalt[/url] Erlebnis mit unserer Premium-Kollektion an Geschmacksrichtungen!
MaxHic · July 1, 2023 at 6:06 pm
Genie?en Sie das ultimative [url=https://velo1.live/]velo snus kaufen online[/url] Erlebnis mit unserer Premium-Kollektion an Geschmacksrichtungen!
JamesKek · July 1, 2023 at 6:11 pm
Immerse yourself in the superior [url=https://velo1.live/]velo snooze[/url] experience with our exclusive collection of flavors!
JohnKek · July 1, 2023 at 6:28 pm
Experience the unparalleled [url=https://velo1.live/]velo mint mini[/url] journey with our diverse range of flavors!
Jamessergo · July 1, 2023 at 6:31 pm
cialis 800mg black online purchase of cialis daily use cialis 10mg pill
mochkadell · July 1, 2023 at 6:31 pm
На сайте https://prohoster.info/?partner=13 вы сможете заказать и купить лучший и надежный хостинг для вашего сайта по доступной цене. При покупке хостинга вы получаете домен в подарок, бесплатную DDoS защиту, бесплатный конструктор сайтов и SSL сертификат в подарок. Безлимитный хостинг, стабильно высокая скорость работы – все для вашего сайта.
Slavax · July 1, 2023 at 6:47 pm
we will not allow you to bring your pet armadillo along mature the scent of freshly cut grass signals the arrival of spring
Robertdup · July 1, 2023 at 8:06 pm
Indulge in the ultimate best [url=https://velo1.live/]Velo Nicotine Pouches[/url] experience with our premium collection of flavors!
Jasperdup · July 1, 2023 at 8:20 pm
Beleef de ultieme [url=https://killa-mini.bio/]KILLA Nikotingehalt[/url] sensatie met onze exclusieve selectie van smaken!
Jamessergo · July 1, 2023 at 8:34 pm
cialis 10mg generic best way to take tadalafil cialis 10mg price
Jamesdup · July 1, 2023 at 8:52 pm
Immerse yourself in the best [url=https://killa1.wiki/]killa snus[/url] experience with our select range of flavors!
Jamesdup · July 1, 2023 at 9:08 pm
Experience the unrivaled [url=https://velo1.ink/]velo snus[/url] flavor sensation with our wide variety of options!
реабилитация инвалидов · July 1, 2023 at 9:25 pm
реабилитация инвалидов
Juhadup · July 1, 2023 at 9:29 pm
Nauti parhaasta [url=https://velo1.live/]velo nuuska[/url] kokemuksesta premium-makujemme kanssa!
Jandup · July 1, 2023 at 9:56 pm
Geniet van de ultieme [url=https://velo1.live/]velo снюс[/url] ervaring met onze premium selectie van smaken!
Jamesdup · July 1, 2023 at 9:59 pm
Dive into the ultimate [url=https://velo1.live/]what is velo nicotine pouches[/url] experience with our wide range of flavors! Discover the world of Velo today.
Jamessergo · July 1, 2023 at 10:55 pm
cialis 10 mg online purchase of cialis daily use brand cialis trial pack
Robertlaw · July 1, 2023 at 10:58 pm
https://www.penza-press.ru/zakaz-pesok.dhtm
best way to take tadalafil · July 2, 2023 at 12:59 am
cialis 40 mg best price top site tadalafil tadalafil 40 mg for sale
Best Gay & LGBT Club · July 2, 2023 at 1:16 am
Best Gay & LGBT Club in Riga
vysotPaymn · July 2, 2023 at 1:32 am
On the site https://board-finance.website/ you can get a private loan or a quick loan online on favorable terms on the day of application for any purpose without commission. Urgent cash loan on the day of application, as well as round-the-clock issuance of loans.
shulyroath · July 2, 2023 at 4:10 am
На сайте https://takerf.ru представлены самые интересные, увлекательные развлечения на любой вкус. Здесь вы сможете сыграть в Live игры, попытать удачу в слотах от ведущих провайдеров. Не упустите шанса сыграть в Блэкджек, Плинко и другие. Заходить на этот портал можно с любого устройства, в том числе, мобильного телефона. Интерфейс будет полностью повторять официальный сайт. И самое важное, то перед вами огромное количество развлечений, а потому вам точно не придется скучать. Все выплаты оперативные.
zolotfuh · July 2, 2023 at 4:40 am
На сайте https://karrespondent.com/ вы сможете ознакомиться со всеми политическими новостями Украины. Перед вами невыдуманные материалы, которые необходимо изучить и вам для того, чтобы быть в курсе последних событий. Перед вами только актуальные данные, которые будет интересно почитать каждому. Они касаются спецоперации на Украине, есть мнения первых лиц, а также ключевых политических фигур. Вся информация подается в простой форме, чтобы понять ее смог каждый и поделился со знакомыми, друзьями.
Robertlaw · July 2, 2023 at 5:29 am
https://sjthemes.com/klassifikaciya-i-osnovnye-xarakteristiki-granitnogo-shhebnya.html
babusDar · July 2, 2023 at 5:57 am
На сайте https://aovniis.ru/uslugi/otkaznoe-pismo-zaklyuchenie/ воспользуйтесь такой услугой, как составление заказного письма. Перед вами весь перечень товаров, для которых оно оформляется. Сюда относят: ароматические свечи, бижутерию, самоклеящиеся ленты, наполнители туалетов, чехлы для смартфонов, канцелярские товары, картины, зонты, гардины и многое другое. На услугу установлена комфортная цена – 2500 рублей, но она не окончательная и может варьироваться в зависимости от вида письма и товара. Оформление письма предусмотрено для самозанятых, ИП.
Jameschurb · July 2, 2023 at 6:16 am
Nasze recenzje sluchawek daja pelny obraz najlepszych produktow na rynku, pomagajac Ci dokonac madrego wyboru.
Jameschurb · July 2, 2023 at 6:28 am
?Quieres saber mas sobre el Momentum True Wireless 2? Este analisis detallado te proporcionara una vision profunda de sus caracteristicas y rendimiento.
nislaLon · July 2, 2023 at 7:22 am
1. Have the courage to follow your heart and intuition. They somehow already know what you truly want to become. Everything else is secondary. (Steve Jobs). 2. Life isn’t about finding yourself. Life is about creating yourself. (George Bernard Shaw). 3. Even if you’re on the right track, you’ll get run over if you just sit there. (Will Rogers). 4.Nothing is impossible to a willing heart. (John Heywood). 5. There is only one happiness in this life, to love and be loved. (George Sand). Source: https://topquotes.life/
JamesHaich · July 2, 2023 at 7:27 am
Discover the incredible world of [url=https://velo1.live/]velo nicotine pouches[/url]. Explore our wide variety of flavours and strength options!
Andrewdup · July 2, 2023 at 7:29 am
Experience the unbeatable sensation of [url=https://velo1.live/]velo pouches[/url] with our diverse assortment of tastes. Immerse yourself in the Velo journey.
JohnDot · July 2, 2023 at 7:41 am
Check out the latest [url=https://velo1.live/]velo snus pris[/url]. We offer a variety of flavors and strengths!
Jameslyday · July 2, 2023 at 7:46 am
Discover the [url=https://velo1.live/]velo nicotine pouches safe[/url] alternatives to traditional tobacco products.
JohnWiday · July 2, 2023 at 7:56 am
Experience the icy thrill with [url=https://velo1.live/]velo freeze x-strong[/url]. Uncover an unmatched nicotine experience!
DavidAdjub · July 2, 2023 at 7:59 am
Discover a world of freshness with [url=https://velo1.live/]velo mint snus[/url]. Indulge in the invigorating experience of mint flavor!
Charliepem · July 2, 2023 at 8:41 am
https://www.stroymaterial-spb.ru/pro-uslugi/priobretenie-nerudnykh-materialov/
Robertlaw · July 2, 2023 at 8:42 am
https://www.stroymaterial-spb.ru/pro-uslugi/priobretenie-nerudnykh-materialov/
romocmek · July 2, 2023 at 8:52 am
На сайте https://bongach.ru/ вы сможете приобрести токены, а также аккаунты BongaCams. Так вы будете наслаждаться, созерцая реальных моделей, которые вы увидите в прямом эфире. Но, как правило, дополнительно предлагаются и сопутствующие услуги, которые многим пользователям оказываются не по карману. Здесь вы сможете купить токены по очень небольшим, скромным ценам, чтобы посмотреть моделей такое количество времени, которое вам нужно. После того, как меняется пароль, то аккаунты на 2 недели изолируются, после чего вновь поступают в магазин.
WillisroG · July 2, 2023 at 10:50 am
https://teletype.in/@carterlisa09/PKvtCPtkRm3
WillisroG · July 2, 2023 at 11:03 am
https://teletype.in/@makskrylov77/jgIVwoTFl_I
nadiyactix · July 2, 2023 at 11:23 am
На сайте https://iqsait.ru/ представлена информация на самую разную тематику, включая отношения, здоровье, уход за собой. Здесь вы найдете контент на психологическую тематику, узнаете, какие маски лучше всего помогают от морщин, как правильно увлажнять кожу летом, об эффективных способах избавления от перхоти и зуда кожи головы. Есть материал на тему первого свидания. Весь контент сопровождается картинками. Регулярно добавляются новые статьи, которые помогут узнать много нового, полезного.
WillisroG · July 2, 2023 at 11:46 am
https://teletype.in/@lisadavis03/5f0W4j1bPd_
Robertlaw · July 2, 2023 at 11:51 am
https://www.stroi-baza.ru/newmessages/newmessage.php?id=1848288
WillisroG · July 2, 2023 at 1:41 pm
https://teletype.in/@jakovlev1965/oR_boO6EmJt
JamesUttet · July 2, 2023 at 1:55 pm
Dive into the exhilarating world of [url=https://velo1.live/]velo[/url]. Experience the ultimate nicotine pouch sensation today!
WillisroG · July 2, 2023 at 2:30 pm
https://teletype.in/@vladislavbelov2007/1oKDCZJjKGV
Samuellic · July 2, 2023 at 2:37 pm
Unleash a refreshing blast with [url=https://velo1.live/]VELO ice cool mint slim[/url]. It’s the frosty flavor journey you’ve been waiting for!
Williamlic · July 2, 2023 at 2:45 pm
Experience an unbeatable strength with [url=https://velo1.live/]VELO freeze x-strong[/url]. It’s the exhilarating punch of flavor you’ve been craving for!
zhenktum · July 2, 2023 at 2:59 pm
На сайте https://takerk.ru вы сможете сыграть в интересные, увлекательные игры, которые позволят еще и немного заработать. Для того чтобы отыскать то, что нужно вам, необходимо воспользоваться специальным фильтром. Просто введите название игры, а затем система сама выдаст подходящее решение. Есть таблица с наименованием игры, фамилией участника, а также ставкой, суммой выигрыша. Вы тоже можете находиться в их числе. Ежедневно получайте бонус 100 рублей, что поможет сделать игру более яркой и разнообразной.
Charliepem · July 2, 2023 at 3:03 pm
http://www.press-release.ru/branches/stroit/098ae99416e86/
ocharClaib · July 2, 2023 at 3:54 pm
На сайте https://108.in.ua/ вы сможете почитать интересные, любопытные новости, которые касаются политики, экономики. Все они свежие, произошли только недавно, а потому будут интересны всем, кто переживает за свою страну. Городской аналитический портал поможет узнать все, что нужно, чтобы быть в курсе последних изменений. Имеются новости туризма, о науке, технологиях, аналитические данные. Все данные брались из проверенных и достоверных источников. Читайте публикации и добавляйте в закладки.
Charliepem · July 2, 2023 at 6:18 pm
https://www.penza-press.ru/zakaz-pesok.dhtm
Robertlaw · July 2, 2023 at 6:18 pm
http://stroy-kz.com/news/Stroitelnie_stati/15842-SHCHeben-grunt-i-pesok-kupit-po-nizkim-tsenam.html
dorofDob · July 2, 2023 at 6:20 pm
On the site https://costaprestige.com/ you will be able to get acquainted with the exclusive real estate, which is located on the Costa del Sol. The competent staff of the agency will select exquisite villas, townhouses, penthouses, real estate near the first line of the sea especially for you. Specially for you, they will choose a solution for every taste and taking into account your financial situation. The catalog contains housing from the developer, as well as secondary real estate. All of them have an attractive price when compared with apartments in other countries.
novalbip · July 2, 2023 at 8:26 pm
Агентство по созданию веб сайтов в Астане https://bright.kz/ предлагает разработку сайтов от самых простых вариантов до крутых интернет проектов. Также студия оказывает услуги технической поддержки, SEO оптимизации, SMM продвижения. Ознакомьтесь с портфолио работ. Команда профессионалов всегда к вашим услугам.
nikitiUtito · July 2, 2023 at 9:12 pm
Компания https://en-mach.ru/ поставляет кольца поршневые по ГОСТу 9515-81, маслосъемные, поршневые, уплотнительные из чугуна и фторопласта Ф4, а также можно купить и заказать запчасти для цилиндра поршневого, поршень, шатун, сальник, клапан пик, мембрана, лубрикатор, крейцкопф компрессора 4ВМ, 305ВП, КТ6, 4ВУ, АВШ, П-110, ВП,3ГП от производителя ПКП ЭНМАШ. Вы сможете купить от производителя запасные части к насосам 2НСГ, обозначением КК (АК).
먹튀사이트 · July 2, 2023 at 10:22 pm
When we share, we create a community of informed individuals.
I understand that by giving back, I am investing in the future and building a
better community.
cialis with prescription online · July 2, 2023 at 10:38 pm
tadalafil cialis from india canadian pharmacy online cialis cialis 20mg tablets prices
http://fantasyoutcall.com · July 2, 2023 at 11:08 pm
Interesting blog! Is your theme custom made or did
you download it from somewhere? A theme like yours with a few simple adjustements would really make my blog stand out.
Please let me know where you got your design. Thanks
Feel free to visit my homepage; http://fantasyoutcall.com
Robertlaw · July 3, 2023 at 12:36 am
https://www.business-gazeta.ru/article/456846
Charliepem · July 3, 2023 at 12:36 am
https://weller.ru/novosti/nerudnye-stroitelnye-materialy-v-sankt-peterburge/
cialis capsules · July 3, 2023 at 12:50 am
cialis 20mg india price tadalafil online site cialis 40 mg price in india
https://a-troninc.com/---/ · July 3, 2023 at 1:32 am
The state passed a bill legalizing both casino-primarily
basesd andd on the net bettting in Pennsylvania.
Here is my web pzge – https://a-troninc.com/%ec%b5%9c%ec%8b%a0-%ed%86%a0%ed%86%a0%ec%82%ac%ec%9d%b4%ed%8a%b8-%ec%bf%a0%ed%8f%b0-%ec%95%88%eb%82%b4/
mitriyCof · July 3, 2023 at 1:52 am
На сайте https://takerz.ru поиграйте в интересные игры, которые подарят отменное настроение, яркие эмоции. Причем, не обязательно иметь при себе компьютер, потому как заходить на сайт можно с любого устройства, включая мобильный телефон. Испытайте удачу в лучших слотах от проверенных производителей, которые стараются для своих игроков. Возможно, вам больше понравятся Live игры. На сайте представлено огромное количество игр, как для новичков, так и профессионалов. Играйте и выигрывайте крупные суммы!
okareBoith · July 3, 2023 at 2:50 am
На сайте https://mr-shrus.ru/ можно приобрести все для своего автомобиля, включая автозапчасти, технические жидкости, автозвук, автомасла, аксессуары, автокрепеж, аккумуляторы, инструмент, чехлы, подушки, органайзеры, шины, электрику. И самое главное, что все это идеального качества, от проверенных марок, которые себя положительно зарекомендовали. Вы подберете товар на самые разные марки и модели автомобилей. Регулярно в компании проходят акции, которые позволят приобрести продукцию по лучшим ценам.
orekhfic · July 3, 2023 at 3:11 am
На сайте https://vkursi.org/ почитайте информацию о спецоперации, последние данные, которые взяты из достоверных источников, поэтому точно будут интересны и вам. Есть информация о потерях со стороны России, Украины. Имеется колонка под названием «Выбор редакции», где находятся наиболее знаменательные события, которые касаются каждого жителя Украины. Есть самые популярные новости, а также свежие, которые опубликованы были не более часа назад. Узнайте полезную информацию о высоких технологиях.
Charliepem · July 3, 2023 at 3:48 am
http://stroy-kz.com/news/Stroitelnie_stati/15842-SHCHeben-grunt-i-pesok-kupit-po-nizkim-tsenam.html
anokhPoili · July 3, 2023 at 6:36 am
На сайте http://moy-dompersonal.ru/ вам помогут подобрать домашний персонал всего за один день. Все сотрудники компетентные, квалифицированные, а потому с легкостью справятся даже с самой сложной задачей, которая требует усидчивости, определенных знаний. А если специалист вам не подошел, то будет произведена замена. В компании работает несколько сотен нянь, домработницы, сиделки, садовники, ответственные водители. Теперь нет необходимости искать специалиста по знакомым, ведь все, кто вам нужен, уже здесь.
rokhoMUG · July 3, 2023 at 7:02 am
On the site https://dogsdiseases.com/ you will receive Understanding common dog diseases is crucial for promoting the well-being of our canine companions. Regular veterinary check-ups, appropriate vaccinations, preventive measures, such as tick control and parasite prevention, and a healthy diet are key to keeping our dogs safe and healthy. By staying informed and taking proactive steps, we can minimize the risks and ensure our dogs lead happy and disease-free lives.
отпожара · July 3, 2023 at 7:58 am
[url=https://uborka-posle-pozhara-v-spb.ru/]Уборка после пожара[/url]
Компания «Участок Клининг» кот опытом более 10-и лет предлагает проф услуги числом уборке квартир через некоторое время пожара на Санкт-Петербурге. Автор этих строк подсобляем нашим посетителям восстановить собственного дома в течение короткие сроки и еще на рослом профессиональном уровне.
Уборка после пожара
ochkaexami · July 3, 2023 at 9:12 am
На сайте https://poisk-pro.ru/ вы сможете быстро найти исполнителей без посредников для выполнения различных задач, таких как ремонт и строительство, транспортные услуги, ремонт техники, дизайн и проектирование, уборка помещений, клининг и многое другое. Биржа профессионалов всегда к вашим услугам – просто добавьте заявку и на нее откликнуться исполнители.
best essay writing service in usa · July 3, 2023 at 9:30 am
I will right away clutch your rss as I can’t to find your e-mail subscription link or newsletter service.
Do you have any? Kindly allow me realize in order that I may just subscribe.
Thanks.
WillisroG · July 3, 2023 at 9:47 am
https://teletype.in/@paul1969/1NRx5n4a4N9
Robertdup · July 3, 2023 at 10:38 am
Indulge in the ultimate best [url=https://velo1.online/]VELO Freeze[/url] experience with our premium collection of flavors!
Emma#nickname[Seprameg,2,5] · July 3, 2023 at 10:45 am
Discover the refreshing sensation of [url=https://velo1.online/]VELO Ice Cool Mini[/url] and explore our exquisite range of flavors!
diplomi_rhymn · July 3, 2023 at 11:38 am
купить диплом автомеханика https://diplomi-attestati.ru/
check here · July 3, 2023 at 11:56 am
Premium land-primarily based casino entertainment oprator
MGM Resorts International launched its Neww Jersey on the web gambling product in 2019.
My blog post; check here
ocharBab · July 3, 2023 at 12:47 pm
На сайте https://takerj.ru вы найдете огромное количество игр, развлечений на любой вкус. Вы сможете сыграть в различные игры, которыми богат сайт. Здесь есть: Плинко, Блэкджек, слоты, Dice, Mines. Вы сможете заработать на своем увлечении и больше ни в чем не нуждаться. Ежедневно вы будете получать бонусы до 100 рублей. Вы сможете заработать до 15% от депозитов. В таблице указано наименование игры, а также логин, ставка и сумма выигрыша, а потому вы узнаете то, сколько выиграл пользователь.
RickNuh · July 3, 2023 at 12:57 pm
Массу женщин беспокоит такой момент, как http://adrianacasanovas.com/uncategorized/hello-world/#comment-129152
Robertlaw · July 3, 2023 at 1:12 pm
http://www.press-release.ru/branches/stroit/098ae99416e86/
Form for Online Visa · July 3, 2023 at 1:33 pm
This text is invaluable. Where can I find out more?
rtemnZop · July 3, 2023 at 2:24 pm
На сайте https://play.google.com/store/apps/details?id=com.rectangular.rain сделайте свои ставки в популярной БК «Олимпбет», которая заполучила огромное количество положительных отзывов, постоянных клиентов. Она работает с 2012 года и с того времени предоставляет безупречный уровень сервиса, круглосуточную техническую поддержку. Все положенные средства выплачиваются сразу же и в необходимом объеме. Только что зарегистрированные пользователи смогут рассчитывать на депозит и различные привилегии. БК предлагает огромный выбор развлечений, включая киберспорт, а также различные события.
바알바 · July 3, 2023 at 3:10 pm
With a work-study job, you are assured to earn at least tthe federal
minimum wage, $7.25 an hour.
Herre is my web blog; 바알바
John#thompson[Riopiscrusystasea,2,5] · July 3, 2023 at 3:10 pm
Discover the remarkable pleasure of the finest [url=https://velo1.gay/]Velo nicotine pouch[/url] selection we have to offer!
WillisroG · July 3, 2023 at 3:37 pm
https://teletype.in/@nadjamaslov05/tlmLPZNkeGt
Jamesgab · July 3, 2023 at 3:39 pm
Join the sensation of [url=https://velo1.gay/]velo snus lyft[/url] and feel the refreshing burst of flavor in every pouch!
Robertlaw · July 3, 2023 at 4:14 pm
http://beristroy.ru/index.php?ukey=articles&postID=995&postSlug=lentochnyj-fundament-nadezhnost-proverennaja-vremenem
chanosnala · July 3, 2023 at 5:02 pm
На сайті https://taxi24.kiev.ua/ ви зможете ознайомитись з послугами, тарифами та вакансіями Таксі24, компанією, яка має власний автопарк та різні тарифи для комфортної поїздки. Також ви зможете замовити кур’єрську доставку та послуги евакуатора.
Michaelaperm · July 3, 2023 at 5:08 pm
Experience the intense flavor of [url=https://velo1.gay/]velo snus mini[/url] in a smaller, more portable package!
JonathanDed · July 3, 2023 at 5:27 pm
Join our discussion as we investigate the question: [url=https://velo1.gay/]Is velo snus[/url] a real alternative to traditional tobacco?
WillisroG · July 3, 2023 at 6:12 pm
https://teletype.in/@kinglaura06/hCZQqWZajK7
ebochAboff · July 3, 2023 at 6:53 pm
На сайте https://sibvitr.ru/ закажите замер мебели для того, чтобы приобрести торговое оборудование, мебель в офис и многое другое для успешного ведения бизнеса. Особенностью компании является то, что замеры, а также дизайн-проект составляются абсолютно бесплатно. На изготовление уходит не более 7 дней, независимо от сложности. На все товары предоставляются гарантии. Мебель производится из качественных, надежных, высокотехнологичных материалов, что позволяет не потерять внешнего вида.
Jamesmusia · July 3, 2023 at 7:10 pm
Uncover a refreshing new world with [url=https://velo1.gay/]VELO Mint Mini[/url] – the pocket-sized revolution in nicotine pouches.
AdamlereE · July 3, 2023 at 8:00 pm
Experience the refreshing and energizing sensation of [url=https://velo1.gay/]snus velo mint[/url] that is crafted with perfection for your ultimate pleasure!
Jamesdic · July 3, 2023 at 8:15 pm
Dive into the cooling sensation of the best [url=https://velo1.gay/]velo freeze[/url]! Experience the frosty freshness that our unique blend has to offer.
James#RandGen[Oalofevibujantewu,2,5] · July 3, 2023 at 8:25 pm
Experience the unmatched refreshing sensation with [url=https://velo1.gay/]Get Velo[/url]. Embrace the thrilling flavors that give you the ultimate nicotine pouch experience!
ezhenGub · July 3, 2023 at 9:59 pm
Школа иностранных языков Центр UP в городе Королёв, это обучение для любого уровня и большое количество различных программ. Есть программы для самых маленьких от трех лет. На сайте https://upcentre.ru/ вы узнаете цены, программы обучения. Возможность заниматься онлайн, различные скидки и акции позволят успешно учить иностранный язык и детям и взрослым.
Jamesdic · July 3, 2023 at 10:28 pm
Dive into the cooling sensation of the best [url=https://velo1.gay/]velo snus[/url]! Experience the frosty freshness that our unique blend has to offer.
JonathanDed · July 3, 2023 at 10:29 pm
Join our discussion as we investigate the question: [url=https://velo1.gay/]velo pouches[/url] a real alternative to traditional tobacco?
thesis creator · July 3, 2023 at 10:30 pm
This is my first time pay a visit at here and i am in fact impressed to read everthing at alone place.
гостиничные чеки санкт петербург · July 3, 2023 at 11:23 pm
Hi there, I enjoy reading all of your article. I like to write a little comment to support you.
udryadub · July 3, 2023 at 11:33 pm
На сайте https://takert.ru поиграйте в интересные, увлекательные игры, которые точно вам понравятся своей динамичностью и тем, что они быстро принесут победу. Портал предоставляет возможность вывести средства либо пополнить баланс. Он играет на прозрачных условиях, а все выигрыши начисляет честно, что позволяет потратить средства тогда, когда необходимо. Перед вами огромное количество слотов и других игр, которые будут интересны и вам. Заходите сюда почаще, чтобы получить больше приятных эмоций и разнообразить досуг в выходной день.
StevenBuB · July 4, 2023 at 12:15 am
cialis 5mg best price australia side effects of cialis cialis 20 mg best price
bihify7 · July 4, 2023 at 12:21 am
Thanks for ones marvelous posting! I really
enjoyed reading it, you’re a great author.I will always bookmark
your blog and will come back later in life. I want to encourage
yourself to continue your great writing, have a nice evening!
CALL GIRLS IN GREATER NOIDA · July 4, 2023 at 12:25 am
This website definitely has all the information and facts I wanted about this subject and didn’t know who to ask.
Charliepem · July 4, 2023 at 1:11 am
http://beristroy.ru/index.php?ukey=articles&postID=995&postSlug=lentochnyj-fundament-nadezhnost-proverennaja-vremenem
여성유흥알바 · July 4, 2023 at 1:23 am
For the final Smackdown of 2022, WWE pulled out all the stops to finish the year with
a bang.
Also visit my site 여성유흥알바
gorovCoula · July 4, 2023 at 1:24 am
На сайте https://play.google.com/store/apps/details?id=com.gameofsort1ng.citychamps вы сможете воспользоваться услугами БК «Liga Stavok». Эта контора существует с 2008 года, работает абсолютно легально, имеет все необходимые сертификаты, документы на осуществление своей деятельности. Отсутствуют какие-либо ограничения. Букмекер обладает отличной репутацией, а потому ему доверяют многие и делают ставки, не опасаясь за свои денежные средства. Большинство отзывов говорит о том, что контора является честной, предлагает прозрачные условия сотрудничества.
zlobiSuh · July 4, 2023 at 2:42 am
Мы предлагаем услугу профессиональной прочистки труб канализации. Наша команда https://xn—-7sbavg6aiesis.xn--p1ai/ состоит из опытных специалистов, которые используют самое современное оборудование и эффективные методики для удаления засоров и устранения проблем. Мы ценим своих клиентов и всегда стремимся предложить оптимальное соотношение цены и качества. Обращайтесь к нам, чтобы получить быстрое и профессиональное решение проблемы с канализацией в Краснодаре!
diplom_rhymn · July 4, 2023 at 2:51 am
гознак дипломы высшего образования https://diplomi-obrazivanie.ru/
hokhlUsarl · July 4, 2023 at 3:27 am
На сайте https://play.google.com/store/apps/details?id=com.rectangular.rain вы сможете сделать ставки, развлечься в БК «Олимпбет», которая предлагает высокий коэффициент на соревнования по таким видам спорта, как: хоккей, футбол, теннис. Кроме того, за регистрацию предлагается бездепозитный фрибет. Вы сможете воспользоваться самыми разными спортивными состязаниями. Все положенные средства выплачиваются моментально. Воспользоваться технической поддержкой можно в любое время, потому как она работает в круглосуточном режиме.
Robertlaw · July 4, 2023 at 4:05 am
https://stroidom-shop.ru/pravila/shheben-raznovidnosti-tehnicheskie-harakteristiki.html
slot 88 · July 4, 2023 at 6:16 am
It’s fantastic that you are getting thoughts from this paragraph as well as from
our discussion made at this time.
alakhdef · July 4, 2023 at 7:11 am
Хотите сделать в квартире ремонт? Тогда советуем вам посетить сайт https://stroyka-gid.ru где вы найдете всю необходимую информацию по строительству и ремонту.
SteveNox · July 4, 2023 at 8:16 am
https://www.youtube.com/watch?v=jQ4iq4OQnF4
clotrimazole price · July 4, 2023 at 8:54 am
cost of pulmicort 200 mcg pulmicort 100 mcg without a prescription pulmicort 100mcg tablets
WalterTaw · July 4, 2023 at 9:29 am
Delve into death metal with death discography rar.
WalterTaw · July 4, 2023 at 9:39 am
Relive the rap classic, dr dre natural born killaz in mp3.
Charliepem · July 4, 2023 at 9:50 am
https://stroidom-shop.ru/pravila/shheben-raznovidnosti-tehnicheskie-harakteristiki.html
buy an essays · July 4, 2023 at 9:50 am
First of all I would like to say excellent blog! I
had a quick question that I’d like to ask if you do not mind.
I was curious to know how you center yourself and clear your head prior to writing.
I have had a hard time clearing my thoughts in getting my thoughts out.
I do take pleasure in writing however it just seems like the
first 10 to 15 minutes tend to be wasted just trying to figure out how to
begin. Any ideas or tips? Thanks!
StevenBuB · July 4, 2023 at 10:03 am
tadalafil 20 mg tablet price in india cialis pills cialis
WalterTaw · July 4, 2023 at 10:15 am
If you’re seeking information on ice skating fabrics, our site can assist you.
panovnus · July 4, 2023 at 10:23 am
На сайте https://takern.ru представлено огромное количество развлечений на самый притязательный вкус. Можно сыграть в слоты, Dice, Mines, Wheel и многое другое. И самое важное, что вы очень быстро научитесь играть, получите от этого положительные эмоции. Каждый пользователь сможет рассчитывать на ежедневные бонусы, особые привилегии. Ознакомьтесь с таблицей, в которой указан вид игры, сумма выигрыша. Все эти игры представлены и в социальных сетях. Выводите деньги и пополняйте баланс тогда, когда вам удобно.
sashuavalp · July 4, 2023 at 10:46 am
Студия растяжки и фитнеса Fresh Stretching в Москве https://freshstretching.ru/ это большое количество направлений, которые подойдут для всех – больше 20 направлений физической активности, которые подойдут людям разной подготовленности и навыков. Уникальные условия посещения – вы можете ходить на тренировки по премиум-абонементу в любой из наших залов, на любые направления. Действуют различные акции и скидки!
StevenHulty · July 4, 2023 at 11:42 am
Когда я впервые посетил Cat Casino, я был поражен его разнообразием и качеством игр. Официальный сайт предлагает простой и интуитивно понятный интерфейс, что делает вход в Cat Casino легким и удобным. Я нашел множество захватывающих слотов, классических карточных игр и живых казино. Бонусная программа Cat Casino также впечатлила меня – щедрые приветственные пакеты и регулярные акции. Я наслаждаюсь каждым моментом игры в Cat Casino!
Больше на сайте https://lin67.ru/
RobertGyday · July 4, 2023 at 11:56 am
Колл-центр Картли http://cartli.ru
RobertGyday · July 4, 2023 at 12:06 pm
принтер для ногтей http://buynail.ru
ikitkalit · July 4, 2023 at 12:23 pm
На сайте https://play.google.com/store/apps/details?id=com.gameofsort1ng.citychamps вы сможете сделать ставки в БК «Лига Ставок», где предлагается огромный выбор самых разных развлечений на любой вкус. Для того чтобы заинтересовать гемблера, используется приветственный бонус, а также эксклюзивные пари, огромная линия. Вы сможете выбрать большое количество способов оплаты. Все положенные средства выплачиваются сразу, без задержек. Эта БК является одной из самых популярных, а потому в надежности не приходится сомневаться.
evgenbus · July 4, 2023 at 12:35 pm
Мы поможем стать независимыми в финансовом плане. Познакомим на сайте https://pro100boss.ru/ с основами, приемами и уроками, которые сделали успешных людей – успешными. Вы найдете статьи по разным видам заработка, электронные книги, написанные известными авторами, примеры бизнес – планов и полезную информацию, связанную с финансами. Мы гарантируем, что сайт не предлагает участия в пирамидных схемах или продажу платных курсов по успешному заработку. Мы предоставляем только проверенные источники информации о различных способах заработка, которые помогут достичь финансовой независимости. Материалы основаны на реальном опыте успешных людей, а также на актуальных тенденциях рынка. Посетите сайт, чтобы получить доступ к качественной информации о заработке!
RobertGyday · July 4, 2023 at 12:39 pm
Кровля в СПБ http://krovlya-nedorogo.ru
hdanobig · July 4, 2023 at 12:39 pm
На сайте https://avtoskypka.com.ua/ оформите заявку для того, чтобы воспользоваться такой услугой, как автовыкуп. Причем рассматриваются автомобили различных моделей и года выпуска. Они выкупаются по рыночной стоимости и очень оперативно, что позволяет получить средства быстро, в полном объеме. Сделка заключается на прозрачных условиях, юридически грамотно и без обмана. К важным преимуществам компании относят то, что оплата поступает таким способом, как вам удобно. Оценка состояния автомобиля по фото в режиме онлайн.
Robertlaw · July 4, 2023 at 12:40 pm
https://weller.ru/novosti/nerudnye-stroitelnye-materialy-v-sankt-peterburge/
StevenBuB · July 4, 2023 at 12:56 pm
rx tadalafil tablets 10 mg when to take tadalafil tadalafil cialis from india
Visa Application Online · July 4, 2023 at 1:06 pm
whoah this blog is great i love reading your posts.
Keep up the good work! You know, lots of people are hunting
around for this info, you could help them greatly.
site · July 4, 2023 at 1:36 pm
I do not even know how I endred up here, but I thought this post was great.
I do not know who you are butt definitely
you are going to a famous blogger if you are nnot already 😉 Cheers!
Feeel free to surf to my homepage – site
StevenHulty · July 4, 2023 at 2:50 pm
Привет! Я недавно открыл для себя Cat Casino и не могу нарадоваться! Официальный сайт Cat Casino просто великолепен – он яркий, стильный и удобный для навигации. Регистрация Кэт Казино заняла всего несколько минут, и теперь я могу наслаждаться широким выбором игр и увлекательными бонусами. Я также использовал зеркало Cat Casino, чтобы быстро попасть на сайт. Вход в Cat Casino очень простой, и я уже с нетерпением жду новых приключений!
RickyEpigo · July 4, 2023 at 2:53 pm
cialis 20mg cialis for performance enhancement brand cialis australia
JeffreycAk · July 4, 2023 at 2:56 pm
решение задач по технической механике
JeffreycAk · July 4, 2023 at 3:06 pm
реферат по математике
StevenHulty · July 4, 2023 at 3:11 pm
Я был приятно удивлен простотой и удобством входа в Кэт Казино. Официальный сайт предоставляет быстрый и легкий способ получить доступ к захватывающему миру азартных игр. Я просто ввел свои учетные данные и через несколько секунд оказался внутри Кэт Казино, готовый к невероятному игровому опыту.
StevenHulty · July 4, 2023 at 3:12 pm
Я только что попробовал вход Кэт Казино, и это было так просто! Официальный сайт предлагает интуитивно понятный интерфейс, где я легко нашел кнопку для входа в Кэт Казино. Ввел свои данные, и вот я уже наслаждаюсь широким выбором игр и возможностью выиграть крупный приз!
Charliepem · July 4, 2023 at 3:31 pm
https://sjthemes.com/klassifikaciya-i-osnovnye-xarakteristiki-granitnogo-shhebnya.html
JeffreycAk · July 4, 2023 at 3:45 pm
курсовая работа по истории
JeffreycAk · July 4, 2023 at 3:51 pm
автор студенческих работ вакансии
StevenHulty · July 4, 2023 at 4:02 pm
Привет! Я наткнулся на Cat Casino недавно и решил попробовать. Регистрация на официальном сайте Cat Casino прошла очень быстро, и я сразу же получил доступ к захватывающему игровому контенту. Зеркало Cat Casino оказалось полезным, когда я хотел быстро попасть на сайт. Я рад, что выбрал Кэт Казино для своих азартных развлечений. Вход в аккаунт происходит без проблем, и я уже наслаждаюсь адреналином от игр!
do my homework for me · July 4, 2023 at 4:36 pm
Have you ever considered creating an e-book or guest authoring on other websites?
I have a blog based on the same information you discuss and would really
like to have you share some stories/information. I know my visitors
would value your work. If you’re even remotely interested, feel free to send me an e mail.
RickyEpigo · July 4, 2023 at 4:45 pm
tadalafil for restoring sexual confidence trusted tadalafil supplier cialis pills uk
JeffreycAk · July 4, 2023 at 5:17 pm
подбор литературы
Carlosunini · July 4, 2023 at 5:48 pm
услуги контекстная реклама
купить чеки на гостиницу в санкт петербурге · July 4, 2023 at 5:51 pm
Hey there! This is my 1st comment here so I just wanted to give a quick shout out and tell you I genuinely enjoy reading through your blog posts. Can you suggest any other blogs/websites/forums that go over the same subjects? Thanks!
cheapessaywriteronlineservices.com · July 4, 2023 at 5:53 pm
I wanted to thank you for this great read!!
I absolutely enjoyed every bit of it. I’ve got you bookmarked to look at new things you post…
JeffreycAk · July 4, 2023 at 6:03 pm
репетитор онлайн вакансии
Carlosunini · July 4, 2023 at 6:09 pm
поисковое продвижение сайта
JeffreycAk · July 4, 2023 at 6:10 pm
курсовая работа по информатике
Carlosunini · July 4, 2023 at 6:10 pm
раскрутка и создание сайтов
help writing a paper · July 4, 2023 at 6:11 pm
Hurrah! In the end I got a blog from where I know how to actually take
helpful facts regarding my study and knowledge.
Williamhoank · July 4, 2023 at 6:32 pm
Revel in the breathtaking [url=https://velo1.shop/]Velo Snus Lyft[/url] experience and let our wide array of flavors uplift your spirits!
Carlosunini · July 4, 2023 at 7:02 pm
продвижения сайта в поисковых системах
JeffreycAk · July 4, 2023 at 7:08 pm
написанное сочинение
스웨디시마사지 · July 4, 2023 at 7:25 pm
authors.
Stop by my website :: 스웨디시마사지
oriskchush · July 4, 2023 at 7:27 pm
На сайте https://oblok.ru ознакомьтесь с интересной, полезной информацией, которая посвящена дате выхода фильма, смартфона, аниме, сериала либо ожидаемых новостей. Имеются интересные данные, которые касаются высоких технологий. Вы узнаете много нового из этой сферы. Регулярно появляются сведения на разную тему, которые необходимо почитать и вам. Все статьи написаны компетентными специалистами, которые хорошо разбираются в данной теме. Вот почему не стоит сомневаться в достоверности сведений.
RickyEpigo · July 4, 2023 at 7:36 pm
low-cost tadalafil tadalafil tablets cialis price usa
tkacheknomi · July 4, 2023 at 9:15 pm
На сайте https://takerh.ru представлено огромное количество интересных игр, слотов, в которые можно сыграть в любое время, в том числе, после работы, в перерыве между учебой. Это ваш реальный шанс заработать столько денег, сколько хочется. Сумма выигрыша ограничивается только вашим временем. Выводить деньги либо пополнять баланс можно даже ночью. Посмотрите на тех счастливчиков, которые уже выиграли немалую сумму. Теперь этот сайт есть и в социальных сетях. Получайте бонусы ежедневно до 100 рублей.
nikitces · July 4, 2023 at 9:20 pm
На сайте https://kasla.ru/ вы сможете приобрести телефоны, смартфоны, различную электронику, функциональные гаджеты и многое другое. Кроме того, можно заказать бюджетный смартфон с большим количеством функций. Весь товар оригинальный, отличается надежностью, на него есть сопроводительная документация. У вас получится приобрести все, что необходимо и с оперативной доставкой. Перед вами огромный выбор вариантов гаджетов, включая тонкие, с креативным и привлекательным дизайном, с металлическим корпусом.
RickyEpigo · July 4, 2023 at 9:37 pm
cialis alternatives buy tadalafil online cialis australia online shopping
romocRak · July 4, 2023 at 10:21 pm
На сайте https://tcredit.kz/ вы сможете получить кредит под залог автомобиля, ознакомиться с требованиями для оформления микрокредита, а также воспользоваться калькулятором по расчету займа. От подачи заявки до выдачи денег всего 1 час – онлайн-одобрение заемщика, автомобиль остается у вас, а страхование будет включено в стоимость кредита.
RickyEpigo · July 4, 2023 at 11:05 pm
cialis for men’s health order cialis tadalafil 5mg generic from us
tveykDot · July 4, 2023 at 11:20 pm
На сайте https://vpogode.com/ вы сможете узнать точный прогноз погоды в своем городе или регионе на сегодня, 3 дня и 7 дней. Карта данных погоды и погода по городам России. Быстрое обновление информации для точного прогноза, легкий поиск города, погода на курортах. Добавьте сайт в избранное для актуальной информации о погоде в вашем городе.
chereZek · July 4, 2023 at 11:44 pm
На сайте https://avto-vykup.com.ua/ вы сможете оперативно рассчитать то, во сколько вам обойдется выкуп автомобиля. В этой компании самые быстрые выплаты, а деньги выдаются сразу же после совершения сделки, а потому вам не придется долго ждать. Каждому клиенту доступен срочный выкуп. Сотрудники компании быстро и профессионально проконсультируют, выкупят автомобиль по максимально выгодной для вас стоимости. Для того чтобы начать сотрудничество, необходимо просто оформить заявку на сайте.
Charliepem · July 5, 2023 at 12:06 am
https://www.stroi-baza.ru/newmessages/newmessage.php?id=1848288
cialis discounts · July 5, 2023 at 12:50 am
reliable source for tadalafil tadalafil prices cialis 20 mg price
seeree · July 5, 2023 at 2:01 am
help with college essay writing cheap essay writer how to conclude a why this college essay
college paper writing service reviews · July 5, 2023 at 2:19 am
Amazing issues here. I’m very happy to peer your article.
Thanks so much and I’m having a look forward to touch you.
Will you please drop me a e-mail?
Georgeempixelm · July 5, 2023 at 2:21 am
check these guys out
ФСС личный кабинет через Госуслуги · July 5, 2023 at 5:10 am
https://govinsurance.ru/ ФСС выплаты личный кабинет.
JeffreycAk · July 5, 2023 at 5:23 am
отчет по производственной практике на предприятии
JeffreycAk · July 5, 2023 at 5:33 am
диплом онлайн сделать
CraigTed · July 5, 2023 at 5:51 am
бетон м300 химки
JeffreycAk · July 5, 2023 at 6:10 am
отчет по практике
JeffreycAk · July 5, 2023 at 6:16 am
отчет по производственной практике
온라인카지노 · July 5, 2023 at 7:13 am
Some bonuses may appear very good upfront but coe with higher wagering
needs.
Feel free to surf to my site 온라인카지노
vavilovat · July 5, 2023 at 7:30 am
По ссылке https://aovniis.ru/uchebnyj-centr-vniis/programmy-obucheniya/podgotovka-ehkspertov-po-sistemam-menedzhmenta-smk/ оформите заявку для того, чтобы подготовить специалистов в системе менеджмента. Это происходит в рамках программы дополнительного образования и применяется для повышения квалификации. Обучающий курс поможет получить необходимые знания, повысить осведомленность в этом вопросе. Все преподаватели – высококлассные специалисты, которые объяснят материал доступным языком.
JeffreycAk · July 5, 2023 at 7:38 am
решение физических задач
tadalafil deals · July 5, 2023 at 7:57 am
cialis without a prescription authentic tadalafil pills cialis pills india
odionblarp · July 5, 2023 at 7:58 am
На сайте https://takerd.ru вы сможете поиграть в интересные игры, сделать ставки и заработать до 15% от депозита рефералов. Ежедневно получайте бонусы до 100 рублей. Перед вами самый большой выбор развлечений на любой вкус. Здесь найдет для себя досуг как новичок, так и профессионал, который стремится получить большую прибыль. Имеется раздел с турнирами, бонусами. Обязательно попробуйте себя в топовых слотах и Live-играх. Ежедневно появляются новые пользователи, которые тоже хотят попытать свои силы.
leoniWar · July 5, 2023 at 8:02 am
На сайте https://marketing-journal.ru/ вы сможете узнать что такое маркетинг, маркетинговые технологии, маркетинг в социальных сетях, мобильный маркетинг, В2В маркетинг, дизайн маркетинг и множество других видов. Почитать статьи экспертов, обзоры и аналитику.
vavadabronlinllpb · July 5, 2023 at 8:19 am
[url=https://vavadabronlinllpb.com/]vavadabronlinllpb[/url]
Today, you can without let take on casino online, many European countries. Become members of the establishment can also gamblers from Turkey, Mexico and Brazil. The …
vavadabronlinllpb
vavadabronlinllpa · July 5, 2023 at 8:23 am
[url=https://vavadabronlinllpa.com/]vavadabronlinllpa[/url]
Enter us at SiGMA & Brazilian iGaming Top America 2023 in Brazil from June 14-18 in vibrant Sao.
vavadabronlinllpa
MvatVsvdfinnagt · July 5, 2023 at 9:05 am
All Apes and Primates here [url=https://nftmonkey1.info/]NFT Monkey[/url].
밤알바 직업소개소 · July 5, 2023 at 9:25 am
Assistance others get that well-manicured lawn although you develop yourr bank account.
my web-site – 밤알바 직업소개소
web page · July 5, 2023 at 9:34 am
Damages triggered by ghosting integrated waste of ttime and sources (72 %) and issues in staff management (55.eight
%).
Feel free to surf to myy page :: web page
tadalafil for performance enhancement · July 5, 2023 at 9:49 am
cialis without prescription tadalafil for boosting libido cialis 20mg
ikitkaCoask · July 5, 2023 at 10:52 am
На сайте https://practicalforex.ru/ вы сможете почитать интересную, актуальную информацию о лучших брокерах, есть содержательные и честные обзоры компаний, которые предоставляют качественные услуги на высоком уровне, не обманывают своих клиентов. Также имеются полезные и информативные статьи на заданную тематику. Вы узнаете о том, как вернуть средства у брокера, который оказался мошенником. Обязательно загляните в колонку с последними статьями. Они ответят на многочисленные вопросы.
텐카페 알바 · July 5, 2023 at 11:09 am
Whhen it comes tto a sizzling job field, the computer system and tech arena is
really hard to beat.
Here is my website :: 텐카페 알바
MvatVmvdfinnagt · July 5, 2023 at 11:23 am
You can buy Apes and [url=https://nftmonkey1.org/]NFT Monkey[/url] here.
nadiyWaype · July 5, 2023 at 11:36 am
На сайте интернет магазин чая и кофе https://bolshecoffee.ru/ вы сможете купить оптом и в розницу, с доставкой по Санкт-Петербургу и всей России, отборные сорта кофе и чая, гаджеты для заваривания, посуду и мерч. Все товары в наличии. Можно ознакомиться с адресами кофеен, а также узнать о школе бариста и его образовательными программами с ценами на обучение.
Davidkisee · July 5, 2023 at 11:36 am
tadalafil reviews tadalafil for sale online cialis 20mg buy
GregoryDaway · July 5, 2023 at 11:39 am
бакалаврская работа
Charliepem · July 5, 2023 at 11:41 am
https://www.business-gazeta.ru/article/456846
GregoryDaway · July 5, 2023 at 12:10 pm
заказать диссертацию
GregoryDaway · July 5, 2023 at 12:10 pm
готовый отчет по производственной практике
MvatVmvvfinnagt · July 5, 2023 at 12:55 pm
You can find all NFT Apes and Primates in original site [url=https://nftmonkey1.xyz/]NFT Monkey[/url].
GregoryDaway · July 5, 2023 at 1:23 pm
отчет по практике
Davidkisee · July 5, 2023 at 2:32 pm
cialis for improved libido tadalafil for sale cialis 20mg price uk
MvatVmdyfinnagt · July 5, 2023 at 2:37 pm
You can find all NFT Apes in original site [url=https://nftmonkey1.website/]NFT Monkey[/url].
GregoryDaway · July 5, 2023 at 3:48 pm
решение физических задач
GregoryDaway · July 5, 2023 at 4:03 pm
решение задач по физике онлайн по фото
GregoryDaway · July 5, 2023 at 4:05 pm
как писать курсовую работу
Davidkisee · July 5, 2023 at 4:26 pm
best price for tadalafil cialis coupon codes tadalafil cialis 5 mg tablet
GregoryDaway · July 5, 2023 at 4:55 pm
отчет по практике бухгалтера
GregoryDaway · July 5, 2023 at 6:14 pm
отчет о прохождении практики
nosovhox · July 5, 2023 at 6:40 pm
На сайте https://takerc.ru вы найдете развлечения на самый взыскательный вкус и с учетом предпочтений. Вы сможете получить бонусы, рассчитывать на особые условия по реферальной программе. Представлены топовые слоты от лучших провайдеров, что позволит моментально получить средства и вывести их. Портал работает честно, открыто, а потому предоставляет возможность заработать столько, сколько хочется. Получайте ежедневно бонусы до 100 рублей. Перед вами те игроки, которые сделали ставку и смогли выиграть приличную сумму.
RandyBlice · July 5, 2023 at 6:56 pm
CharlesSlamy CharlesSlamy https://rentry.co/k7hzko
yushablimi · July 5, 2023 at 7:31 pm
На сайте https://otdykh-u-morya.ru/ бронируйте номер в гостевом доме, где всегда чисто, уютно и комфортно. Для каждого гостя предусмотрена чистая постель, имеются все необходимые принадлежности для качественного и полноценного отдыха. С балконов открывается роскошный вид на природу. На широкой двуместной кровати вы сможете полноценно отдохнуть и выспаться. Во дворе имеется обустроенная зона отдыха, а также мангал для приготовления мяса. Недалеко находятся пляжи, аптеки, салоны красоты, магазины.
GregoryDutle · July 5, 2023 at 9:42 pm
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-dlya-programm-loyalnosti-07-05
DavidAmani · July 5, 2023 at 9:56 pm
https://telegra.ph/Ispolzovanie-veselyashchego-gaza-v-neotlozhnoj-medicine-07-05
avitsktam · July 5, 2023 at 10:01 pm
На сайте https://takerb.ru вы сможете поиграть в любопытные и интересные игры, развлечься как следует и получить приятные, яркие эмоции на весь день, а заодно еще и заработать неплохие средства, чтобы потратить на свою мечту. У вас получится испытать удачу, протестировав топовые слоты от лучших провайдеров, которые поставляют качественное оборудование. Вас ожидает Блэкджек, Плинко и многое другое. Зарабатывайте до 15% депозита от рефералов. Ежедневно получайте до 100 рублей бонусами.
Larryron · July 5, 2023 at 10:10 pm
trusted tadalafil supplier discounted tadalafil cheapest cialis on the web
iyanoSah · July 5, 2023 at 11:54 pm
На сайте https://topgear-online.ru/ вы сможете смотреть онлайн бесплатно на русском все сезоны и серии, спецвыпуски сериала Топ Гир с самого первого сезона до последних новинок. Top Gear – британское телешоу об автомобилях, в котором рассказывается о новиках автомобильного мира, проводятся тест-драйвы, а также различные знаменитости делятся своим мнением на тему мира авто.
https://essaypromaster.com · July 6, 2023 at 12:00 am
Hello, after reading this amazing article i am too glad to share my knowledge here with mates.
Rogerner · July 6, 2023 at 12:31 am
tadalafil overnight delivery online medication pharmacy cialis generic
GregoryDutle · July 6, 2023 at 12:49 am
https://telegra.ph/Luchshie-vidy-sporta-dlya-mobilnyh-stavok-ischerpyvayushchee-rukovodstvo-07-05
DavidAmani · July 6, 2023 at 1:03 am
https://telegra.ph/Idei-landshaftnogo-ozeleneniya-dlya-sada-ne-trebuyushchego-osobogo-uhoda-07-05
TerryPhake · July 6, 2023 at 2:48 am
поисковая оптимизация сайта продвижение сайтов
TerryPhake · July 6, 2023 at 3:03 am
сайт создание и продвижение
TerryPhake · July 6, 2023 at 3:49 am
продвижение сайтов цена
GregoryDutle · July 6, 2023 at 3:53 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-velosport-07-05
TerryPhake · July 6, 2023 at 3:57 am
яндекс директ продвижение
DavidAmani · July 6, 2023 at 4:10 am
https://telegra.ph/Kak-vybrat-parik-podhodyashchij-k-vashim-naturalnym-volosam-07-05
Franksap · July 6, 2023 at 4:22 am
https://telegra.ph/nastolnye-igry-dlya-detej-7-let-kupit-07-06
Franksap · July 6, 2023 at 4:50 am
https://telegra.ph/nastolnye-igry-na-russkom-riga-07-06
Franksap · July 6, 2023 at 4:51 am
https://telegra.ph/nastolnye-igry-dlya-detej-7-let-raspechatat-07-06
온라인카지노 · July 6, 2023 at 5:42 am
I really like what you guys tend to be up too. This type of clever work and coverage!
Keep up the terrific works guys I’ve incorporated you guys to my blogroll.
Franksap · July 6, 2023 at 5:57 am
https://telegra.ph/nastolnye-igry-dlya-kompanii-vzroslyh-za-stolom-07-06
GregoryDutle · July 6, 2023 at 6:59 am
https://telegra.ph/Kak-ispolzovat-mobilnye-prilozheniya-dlya-stavok-chtoby-hedzhirovat-svoi-stavki-07-05
DavidAmani · July 6, 2023 at 7:16 am
https://telegra.ph/Kak-vybrat-parik-dlya-raznyh-tipov-i-tekstur-volos-07-05
nechkRit · July 6, 2023 at 7:35 am
На сайте http://pankasyno7.com вы сможете узнать больше информации о популярном онлайн-заведении «Мистер Казино», которое считается самым востребованным в Польше. Оно рекомендует ознакомиться с огромным количеством развлечений, которые обязательно вам понравятся и помогут разнообразить досуг, интересно провести время. Этот портал не перестает радовать клиентов регулярным пополнением игр, чтобы удовлетворить предпочтения каждого пользователя. Имеются игры, в которые можно сыграть абсолютно бесплатно.
Franksap · July 6, 2023 at 8:12 am
https://telegra.ph/kupit-nastolnye-igry-internet-magazin-07-06
read more · July 6, 2023 at 8:22 am
The customer service also includes a live chat where the casino players can establish communication correct away.
My website; read more
Franksap · July 6, 2023 at 8:26 am
https://telegra.ph/nastolnye-igry-kishinyov-kafe-07-06
Franksap · July 6, 2023 at 8:27 am
https://telegra.ph/nastolnye-igry-dlya-detej-3-let-kupit-07-06
Franksap · July 6, 2023 at 9:15 am
https://telegra.ph/detskie-nastolnye-igry-kishinev-07-06
DannyRaw · July 6, 2023 at 9:23 am
приложение цифровой радиографии
DannyRaw · July 6, 2023 at 9:35 am
неразрушающий контроль и диагностика
GregoryDutle · July 6, 2023 at 10:02 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-bejsbol-07-05
Franksap · July 6, 2023 at 10:14 am
https://telegra.ph/nastolnye-igry-dlya-detej-5-let-kupit-ukraina-07-06
DannyRaw · July 6, 2023 at 10:19 am
индукционный метод неразрушающего контроля
DavidAmani · July 6, 2023 at 10:20 am
https://telegra.ph/Kak-sozdat-terrarium-07-05
DannyRaw · July 6, 2023 at 10:26 am
стоимость неразрушающего контроля сварных соединений
Franksap · July 6, 2023 at 10:29 am
https://telegra.ph/nastolnye-igry-dlya-detej-6-let-07-06
avlovsnor · July 6, 2023 at 12:19 pm
Сайт https://medbloginfo.ru/ это полезные статьи и советы о медицине. Вы узнаете все о специализации врачей, лекарствах и препаратах, частях тела человека. Актуальные и свежие новости, обзоры, экспертные мнения и много другой полезной информации о медицине.
Juhadup · July 6, 2023 at 12:38 pm
Kokeile uutta ja ainutlaatuista [url=https://killapods.eu/fi/product/haiza-cbd/]Haiza CBD[/url] -valikoimaa ja koe rentouttavat hyodyt!
GregoryDutle · July 6, 2023 at 1:11 pm
https://telegra.ph/Kakie-nalogovye-riski-svyazany-s-ispolzovaniem-offshornyh-kompanij-v-Rossii-07-05
DavidAmani · July 6, 2023 at 1:30 pm
https://telegra.ph/Kak-ukladyvat-parik-dlya-raznyh-sluchaev-07-05
proposal thesis · July 6, 2023 at 2:02 pm
Asking questions are in fact fastidious thing if you are not understanding anything completely, however
this piece of writing provides fastidious understanding even.
Rogerner · July 6, 2023 at 3:15 pm
tadalafil without a doctor’s visit cost prescription drugs tadalafil 20 mg best price
Личный кабинет МосОблЕИРЦ · July 6, 2023 at 3:58 pm
https://eirc-mo.ru/ МосОблЕИРЦ личный кабинет физического лица вход. Пошаговое руководство по регистрации на официальном сайте и входу в личный кабинет МосОблЕИРЦ. Обзор функционала и возможностей личного кабинета.
DavidAmani · July 6, 2023 at 4:38 pm
https://telegra.ph/Ispolzovanie-veselyashchego-gaza-v-oftalmologii-07-05
밤일알바 · July 6, 2023 at 5:26 pm
I mean, it’d have too wait till jjust after the court
stuff is finalized, but the gikrl requirds a break from the hate
mob.
Also visit my website 밤일알바
moskvTon · July 6, 2023 at 7:00 pm
На сайте https://wf-game.ru/ вы найдете все актуальные пин коды Wafrace, а также ссылки лутдог, есть и подарочные ссылки, Origin. Представлена рубрика с гарантиями, контактами, аккаунты, ключи. Зайдите в колонку «Популярное», а также «Последние» и «В тренде». Изучите все меню сайта, чтобы принять правильное решение. Жмите на баннер, чтобы получить халявные пин коды прямо сейчас. К каждой записи имеются комментарии, которые может оставлять любой пользователь. Также есть новости сайта, которые публикуются ежедневно.
atveySlima · July 6, 2023 at 7:18 pm
Le site https://fr.ikea-club.org/ est un club d’amateurs d’ikea. Vous pouvez découvrir des nouvelles intéressantes, lire des critiques, découvrir à quel point il est intéressant de refaire des meubles d’ikea, ainsi que lire des critiques sur les produits de ce magasin.
GregoryDutle · July 6, 2023 at 7:30 pm
https://telegra.ph/Kakie-nalogovye-zakony-i-pravila-primenyayutsya-k-offshornym-kompaniyam-07-05
anyusneumn · July 6, 2023 at 7:36 pm
На сайте https://www.rospromtest.ru/content.php?id=5 ознакомьтесь с информацией, посвященной тому, что такое сертификат ISO 9001, кому и когда выдается. Кроме того, узнаете, во сколько обойдется оформление такого важного документа. На сам процесс уйдет всего один день. Для каждого клиента действует курьерская доставка, которая предоставляется абсолютно бесплатно. Для того чтобы получить документ, необходимо предоставить заявку, копии ОГРН, ИНН. На сайте вы увидите образец сертификата соответствия.
kvorthautt · July 6, 2023 at 8:29 pm
На сайте https://vpiteredom.ru/ получится подобрать теплую, уютную квартиру прямо в центре города. Также есть раздел с популярными объектами, в которых желают жить многие. Ознакомьтесь с каждым объектом поближе, чтобы точно не ошибиться с выбором и приобрести квартиру своей мечты. Напротив каждого объекта указан и год сдачи. Кроме того, опубликованы свежие и интересные новости, которые помогут узнать много нового и интересного. Изучите контакты, чтобы позвонить и уточнить всю интересующую вас информацию.
JamesVieli · July 6, 2023 at 9:32 pm
Dive into the mesmerizing [url=https://killapods.eu/]velo snus[/url] experience and let our rich array of flavors elevate your senses!
Stevendup · July 6, 2023 at 9:50 pm
Step into the fascinating world of [url=https://killapods.eu/]velo pouches[/url] and let our diverse range of flavors invigorate your senses!
yrmff.wikikali.com · July 6, 2023 at 9:53 pm
It has more than 900 slot machines aand more than 100 tables, most of them baccarat.
My web blog :: yrmff.wikikali.com
Benjamindup · July 6, 2023 at 9:57 pm
Immerse yourself in the refreshing [url=https://killapods.eu/]velo mint mini[/url] journey. Let the cool, crisp flavor invigorate your taste buds!
Juhadup · July 6, 2023 at 10:09 pm
Nauti parhaasta [url=https://killapods.eu/]velo nikotiinipussit[/url] kokemuksesta laajan makuvalikoimamme avulla!
Markusdup · July 6, 2023 at 10:15 pm
Genie?en Sie das ultimative [url=https://killapods.eu/]velo snus kaufen[/url] Erlebnis mit unserer Premium-Auswahl an Aromen!
GregoryDutle · July 6, 2023 at 10:41 pm
https://telegra.ph/Kak-upravlyat-bankrollom-pri-mobilnyh-stavkah-07-05
dissertation writing help · July 6, 2023 at 10:43 pm
I know this if off topic but I’m looking into starting my own weblog and was curious what
all is required to get setup? I’m assuming having a
blog like yours would cost a pretty penny?
I’m not very internet smart so I’m not 100% certain. Any tips or advice would be greatly appreciated.
Thanks
DavidAmani · July 6, 2023 at 10:54 pm
https://telegra.ph/Kak-sozdat-potryasayushchij-sadovyj-bordyur-07-05
clotrimazole 10g cheap · July 6, 2023 at 11:41 pm
macrobid over the counter macrobid 100 mg nz macrobid 100mg pharmacy
GregoryDutle · July 7, 2023 at 1:50 am
https://telegra.ph/Kak-izbezhat-rasprostranennyh-oshibok-pri-mobilnyh-stavkah-07-05
DavidAmani · July 7, 2023 at 2:05 am
https://telegra.ph/Ispolzovanie-rastenij-dlya-uluchsheniya-kachestva-vozduha-v-vashem-dome-07-05
arkelokes · July 7, 2023 at 3:08 am
Независимо от того, где вы находитесь в Москве или Московской области, мы готовы доставить ваш новый диван https://mebel-studia.ru/mjagkaja-mebel/divani/ прямо к вам домой. Мы предлагаем удобный сервис доставки, чтобы вы могли наслаждаться своей новой мебелью без лишних хлопот.
marovNuh · July 7, 2023 at 4:03 am
На сайте https://eurotoday.net/ вы сможете ознакомиться с последними экономическими, политическими новостями. Также есть материалы на бизнес тему. Представлены разделы с новостями Великобритании, Франции, Германии, Италии, Испании. Все они содержат только важную и актуальную информацию, события, которые произошли совсем недавно. Есть данные о первых лицах государств, их биография, любопытные факты, которые будет полезно узнать и вам. Все новости с картинками, чтобы их было интересно читать.
daachka.ru · July 7, 2023 at 4:33 am
Hi there would you mind stating which blog platform you’re working with? I’m planning to start my own blog in the near future but I’m having a tough time choosing between BlogEngine/Wordpress/B2evolution and Drupal. The reason I ask is because your design and style seems different then most blogs and I’m looking for something completely unique. P.S Apologies for getting off-topic but I had to ask!
serialy_crelt · July 7, 2023 at 4:43 am
https://deetv.tv/
alyushagose · July 7, 2023 at 4:47 am
На сайте https://agsvv.ru/ вы сможете ознакомиться с каталогом медтехники от производителя ООО «Хронос». Завод основан в 2009 году и производит облучатели для лечения кожных заболеваний которые помогут в лечении кожных заболеваний, таких как псориаз, витилиго, атопический дерматит, себорейный дерматит, экзема, грибовидный микоз, отрубевидный лишай, нейродермит, очаговое выпадение волос, гнездовая алопеция, парапсориаз.
GregoryDutle · July 7, 2023 at 5:00 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-OverUnder-07-05
DavidAmani · July 7, 2023 at 5:12 am
https://telegra.ph/Istoriya-parikov-Rol-parikov-v-politike-07-05
RickNuh · July 7, 2023 at 6:23 am
У нас вызывает знатное беспокойство момент, насчет https://psicofarmacos.info/
udakoneulA · July 7, 2023 at 7:07 am
На сайте https://vpiteredom.ru/ получится подобрать теплую, уютную квартиру прямо в центре города. Также есть раздел с популярными объектами, в которых желают жить многие. Ознакомьтесь с каждым объектом поближе, чтобы точно не ошибиться с выбором и приобрести квартиру своей мечты. Напротив каждого объекта указан и год сдачи. Кроме того, опубликованы свежие и интересные новости, которые помогут узнать много нового и интересного. Изучите контакты, чтобы позвонить и уточнить всю интересующую вас информацию.
sveshNof · July 7, 2023 at 7:27 am
На сайте https://takerp.ru вы найдете все для интересного, веселого времяпрепровождения. Огромное количество слотов, игр, которые зарядят позитивом и приятными эмоциями. И самое главное, что выигрыш выводится в минимальные сроки, быстро, что позволит потратить деньги в ближайшее время. Из огромного многообразия игр вы обязательно выберете то, что поднимет настроение. В эту минуту вы сможете пополнить счет либо вывести деньги. Имеется таблица с игроками и количеством выигрыша. Для того чтобы найти подходящую игру, необходимо воспользоваться специальным поиском.
anechCaree · July 7, 2023 at 7:34 am
На сайте https://bloggery.io/ воспользуйтесь услугами блоггеров, которые разрекламируют ваш товар, повысят узнаваемость бренда и помогут получать больше денег. А для блоггеров эта площадка станет незаменимой для поиска рекламодателей. Это ваша возможность стать более популярным, раскрученным и даже попасть на телевидение, заработать больше денег и заключить контракты с одними из лучших марок. Рассчитайте стоимость размещения прямо сейчас. Несколько тысяч блоггеров сотрудничают с площадкой на ежедневной основе.
GregoryDutle · July 7, 2023 at 8:09 am
https://telegra.ph/Kakie-aspekty-offshornyh-kompanij-reguliruyutsya-mezhdunarodnymi-soglasheniyami-07-05
vavadabronlinllpc · July 7, 2023 at 8:15 am
[url=https://vavadabronlinllpc.com/]vavadabronlinllpc[/url]
O jogo foi feito para ser divertido. Lembre-se de que voce arrisca dinheiro ao fazer apostas. Nao gaste mais do que voce pode perder.
vavadabronlinllpc
DavidAmani · July 7, 2023 at 8:20 am
https://telegra.ph/Ispolzovanie-veselyashchego-gaza-pri-neotlozhnyh-veterinarnyh-procedurah-07-05
кабельканал · July 7, 2023 at 8:23 am
[url=https://kabel-kanaly.ru/]Кабель канал[/url]
целый короб чтобы кабеля – провод центральный – эльбор элемент – ямб 90буква50 мм – часть In-Liner Aero – ярко-фиолетовый серый – двойной замок.
Кабель канал
GregoryDutle · July 7, 2023 at 11:15 am
https://telegra.ph/Kak-najti-luchshie-koehfficienty-dlya-mobilnyh-stavok-07-05
DavidAmani · July 7, 2023 at 11:26 am
https://telegra.ph/Idei-landshaftnogo-dizajna-dlya-malenkogo-perednego-dvora-07-05
Stuartbet · July 7, 2023 at 12:28 pm
купить осаго онлайн
Stuartbet · July 7, 2023 at 12:39 pm
микрозаймы онлайн
ysotsBus · July 7, 2023 at 12:46 pm
На сайте https://usaemall.com/ изучите информацию, которая касается самых последних новостей мира. Также имеются свежие и правдивые данные на тему политики, экономики, здоровья, стиля жизни, окружающей среды, спорта, путешествий, высоких технологий. Имеется колонка с новостями за последний день или несколько часов. Их обсуждает весь мир, а потому они будут интересны и вам. Опубликован и курс биткоина, а также стоимость акций различных корпораций. Также есть информация на тему спорта. Все новости созданы экспертами, что позволит не сомневаться в достоверности фактов.
lyanoendal · July 7, 2023 at 2:16 pm
https://bebetter-shop.com/ BeBetter Shop – #1 Worldwide Blockchain Marketing agency. Complete confidentiality & anonymity. Fast online reputation boosting! Get up to 1000 reviews and brand mentions within just one month! There is no need to spend your budget on PPC advertising with a very short-term effect. Get verified reviews that will pay off your advertising investment for years to come. Move up to the Top of the Blockchain category on popular resources and engage your target audience!
Eugeneplalt · July 7, 2023 at 2:18 pm
Регистрация Cat Casino
GregoryDutle · July 7, 2023 at 2:20 pm
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-basketbol-07-05
DavidAmani · July 7, 2023 at 2:32 pm
https://telegra.ph/Kak-nosit-parik-s-raznymi-pricheskami-07-05
Rogerner · July 7, 2023 at 4:00 pm
tadalafil without a prescription online medication pharmacy cialis 10mg price in india
Andresempixelm · July 7, 2023 at 4:40 pm
click for info
klyuyeWailt · July 7, 2023 at 5:45 pm
На сайте https://bigpicture.ru/ вы найдете самые любопытные, последние новости в картинках, которые будут интересны всем, без исключения. Они представлены на самую разную тему, в том числе, приключения, фотография, интересные находки. На сайте рассказываются удивительные истории, невероятные факты, которые вы точно оцените по достоинству. Все новости представлены в картинках и сопровождаются интересным текстом. Почитайте всю важную информацию, которая расширит ваш кругозор. Постоянно появляются новые данные.
Rogerner · July 7, 2023 at 6:23 pm
cialis tablets online canadian pharmacy with prescription generic cialis 20 mg
nadiyBox · July 7, 2023 at 6:32 pm
На сайте https://takere.ru вы найдете много слотов, самых разных развлечений, игр, с помощью которых заработаете много денег. Но получить деньги удастся не только, делая ставки или играя, а еще и при помощи реферальной программы. Есть и такие игры, которые дарят огромное количество бонусов и привилегий. Это возможность увеличить свой заработок и, наконец, исполнить мечту. Можно будет попробовать самые разные развлечения, которые принесут неплохой доход. Огромный выбор игр на самый притязательный вкус.
Личный кабинет госуслуги · July 7, 2023 at 7:15 pm
https://helpgov.ru Вход в Госуслуги. Войдите или зарегистрируйтесь, чтобы получить полный доступ к электронным госуслугам.
get more info · July 7, 2023 at 7:29 pm
Likke Sands, Caesars iis also interested inn the possibility oof Japanese regulators legalizing gambling
ahead of the 2020 Tokyo Olympics.
My web site … get more info
erkulosop · July 7, 2023 at 9:36 pm
На сайте https://online.lord-films.one/doramy опубликованы любопытные фильмы, интересные сериалы, качественные мультфильмы, аниме и многое другое, что скрасит досуг и поможет отдохнуть, расслабиться от повседневных дел. Все они в отличном качестве, с хорошим звуком, поэтому смотреть – одно удовольствие. Фильмы находятся в огромном многообразии, в том числе, за прошедшие годы. Имеются и новинки этого сезона, которые посмотрели уже многие. Постоянно появляются новые фильмы, которые обсуждают миллионы.
apovaDiasy · July 7, 2023 at 10:32 pm
На сайте https://jozibali.uz/ послушайте приятную, красивую узбекскую, русскую, турецкую музыку. Здесь есть не только всеми любимые хиты, но и новинки, с которыми должны ознакомиться и вы. Есть раздел с топом треков за день. Имеются стильные и изысканные композиции за месяц. Их исполняют любимые многими артисты, талантливые певцы. Также на сайте вы найдете и интересные, любопытные клипы, которые трогают за душу. Ознакомьтесь с новинками, которые выкладываются регулярно. Имеются и интересные фильмы.
Rogerner · July 7, 2023 at 11:10 pm
tadalafil for erectile dysfunction relief canadian pharmaceuticals online safe cialis pills
ochkaPap · July 7, 2023 at 11:49 pm
https://mebel-diva.com/ вы сможете ознакомиться с большим каталогом мебели, которая производится на заказ в Москве и Московской области. Корпусная мебель производится из высококачественных материалов и прослужит долгое время. Работаем под ключ: консультируем, согласовываем проект, готовим предварительный расчет, производим. Наш дизайнер поможет во всех вопросах.
Fast lean pro supplements · July 8, 2023 at 12:00 am
What i do not understood is in fact how you are not actually a lot more well-preferred than you may be right now.
You are very intelligent. You realize therefore considerably in terms
of this topic, produced me for my part imagine it from so many varied angles.
Its like women and men don’t seem to be fascinated
unless it is something to do with Woman gaga! Your own stuffs nice.
Always maintain it up!
zodiac_rhymn · July 8, 2023 at 2:45 am
совместимость знаков зодиака рак
stepahip · July 8, 2023 at 4:26 am
На сайте https://telegra.ph/Reklama-dlya-biznesa-06-21 вы сможете заказать рекламу для вашего бизнеса на канале Телеграм. Чуть ниже вы найдете расценки на рекламные посты. Каждый клиент получает возможность воспользоваться скидками, акциями. При оптовой заявке для вас доступна скидка в 10%. Если закажете оптовую заявку для того, чтобы разместить ее в группе, то тогда ваша скидка будет 20%. Время, дату публикации выбираете на свое усмотрение. Объявление будет присутствовать 30 суток.
evgenREd · July 8, 2023 at 5:54 am
На сайте https://takerg.ru представлено огромное количество слотов, Live игры от лучших провайдеров, которые никогда не обманывают и дарят огромное количество поощрений, располагают бонусной системой. У этого портала есть профиль в разных социальных сетях, а также реферальная программа. Вы сможете зарабатывать до 15% от реферальных депозитов. Пополнять, выводить деньги можно будет в любое время. Перед вами большое количество игр, что позволит точно не заскучать, а весело и интересно провести время.
eontewoche · July 8, 2023 at 6:37 am
На сайте https://autosibelectroservis.ru/ закажите звонок для того, чтобы воспользоваться такой услугой, как ремонт автосвета, автоподогрева, стартеров, генераторов, автосигнализации. Также доступна компьютерная диагностика, прошивка, тонировка. Важным моментом является то, что вас ожидает круглосуточная помощь. Также на сайте имеются интересные тематические новости. Они ответят на многочисленные вопросы. Ознакомьтесь с отзывами, которые оставили клиенты. Каждый специалист отличается высокой квалификацией.
Rogerner · July 8, 2023 at 6:43 am
tadalafil for treating benign prostatic hyperplasia drug store online cialis 100mg price
Stevenlof · July 8, 2023 at 9:33 am
https://wiki.prologosconsultoresasociados.cl/index.php/Gelios_Company:_Bringing_Ukrainian_Expertise_In_Web_And_App_Development_To_Toronto_Canada
insurance quote · July 8, 2023 at 11:18 am
Nice weblog here! Additionally your site so much up very fast!
What host are you using? Can I get your associate hyperlink on your host?
I want my web site loaded up as fast as yours lol
Also visit my blog … insurance quote
Stevenlof · July 8, 2023 at 12:05 pm
http://kousokuwiki.org/wiki/%E5%88%A9%E7%94%A8%E8%80%85:EulahLawry2149
nadachee.ru · July 8, 2023 at 2:21 pm
Hello there! Would you mind if I share your blog with my facebook group? There’s a lot of people that I think would really enjoy your content. Please let me know. Thanks
sarevhic · July 8, 2023 at 3:07 pm
На сайте https://t.me/uzpopka_com_k представлены массажистки – симпатичные, милые девушки, которые обладают ослепительными внешними данными, а потому покорят вас одним лишь взглядом. У них нежные, ласковые руки, которые деликатно прикасаются к вам и расслабляют. Вы сможете вызвать девушку в любое время, когда вам нужно – для приятного досуга в выходной день либо вечером, после работы. Массаж будет длиться ровно столько, сколько вы хотите. Выбирайте девушку из большого количества доступных вариантов.
etechmurge · July 8, 2023 at 3:41 pm
На сайте https://growex-group.ru/ закажите морские перевозки, авиаперевозки, таможенное оформление, складское хранение. Каждый клиент сможет рассчитывать на огромное количество преимуществ, включая электронный документооборот. За вами закрепляется персональный менеджер, а при необходимости можно воспользоваться консультацией. Информирование происходит в круглосуточном режиме. Сотрудничество только с компетентными агентами. Специально для вас несколько предложений по срокам и цене. Действует оптимизация затрат.
cat_viess · July 8, 2023 at 3:49 pm
Я впечатлен официальным сайтом Cat Casino! Он предлагает чистый и современный дизайн, который мне нравится. Навигация по сайту интуитивно понятна, и я могу легко найти нужные мне разделы, включая игры, акции и поддержку клиентов. Кроме того, сайт полностью адаптивен для мобильных устройств, что позволяет мне играть в любимые игры на своем смартфоне или планшете. Официальный сайт Cat Casino – это отличное место для азартных развлечений, доступное везде и всегда!”
canadian mail order pharmacy · July 8, 2023 at 4:59 pm
tadalafil for men cheap medications tadalafil cialis 5 mg tablet
ryukopet · July 8, 2023 at 5:08 pm
На сайте https://takerl.ru находится огромное количество развлечений на самый притязательный вкус, включая топовые слоты, Блэкджек, Плинко и многое другое. Вы сможете ежедневно получать до 100 рублей бонусов. Зарабатывайте 15% от депозитов. Пополняйте и выводите деньги тогда, когда вам удобно. Для того чтобы найти развлечение по душе, воспользуйтесь специальным поиском. Опубликован список лучших слотов, который поможет интересно и необычно провести время. Заходите сюда регулярно для того, чтобы поправить свое материальное положение.
yushkfeque · July 8, 2023 at 6:16 pm
На сайте https://lufkad.com/ вы сможете изучить каталог мансардных окон для того, чтобы подобрать оптимальный вариант. К важным преимуществам таких конструкций относят то, что они светлые, абсолютно безопасные и не выбрасывают в воздух токсичных, вредных веществ. Приятное дизайнерское решение позволит окну идеально вписаться в помещение. Конструкции выполняются точно по ГОСТу, поэтому прослужат долгое время. Опыт работы компании – более 17 лет, поэтому она в курсе всех нюансов. Ознакомьтесь со всеми вариантами прямо сейчас.
Bernieflort · July 8, 2023 at 6:48 pm
order cialis pharmacy canadian cialis online
정품 비아그라 구매 · July 8, 2023 at 7:20 pm
I am not certain the place you are getting your information, however
great topic. I must spend some time finding
out much more or understanding more. Thank you for great
info I was on the lookout for this information for my mission.
MiguelTow · July 8, 2023 at 9:14 pm
https://telegra.ph/Vliyanie-snosa-kvartir-na-chuvstvo-prinadlezhnosti-zhitelyam-07-05
Bernieflort · July 9, 2023 at 12:17 am
cialis overnight delivery buy prescription drugs canada liquid cialis
ikheejar · July 9, 2023 at 12:43 am
На сайте https://play.google.com/store/apps/details?id=com.sweetslots.casino.free.slot.machines.online представлен симулятор казино, который предлагает сыграть на виртуальные деньги на игровые автоматы в режиме онлайн. Каждый новый игрок получает возможность воспользоваться приветственным бонусом. Каждый час выдаются монеты абсолютно бесплатно – это поможет играть и выигрывать. Кроме того, организуются выгодные акции. Вас ожидают внушительные выигрыши, а также крупные и значимые призы.
WayneVer · July 9, 2023 at 1:16 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-velosport-07-05
Williamhex · July 9, 2023 at 1:25 am
https://telegra.ph/Kak-nosit-parik-s-ochkami-07-05
ryushtup · July 9, 2023 at 1:44 am
На сайте http://moscow.allbusiness.ru/?pr=735926 вы сможете воспользоваться такой важной, нужной услугой, как алмазная резка. На странице вы найдете всю актуальную информацию об этой услуге. Такой процесс является высокотехнологичным и помогает сформировать либо сделать больше проемы в стенах, выполненных из кирпича, бетона. Алмазная резка осуществляется безударным способом, что позволяет выполнить все работы без пыли и бесшумно. Все работы выполняются в соответствии с ГОСТом, с соблюдение норм СНиПа.
My....Page · July 9, 2023 at 2:32 am
This blog was… how do I say it? Relevant!!
Finally I’ve found something that helped me. Thank you!
porn_rhymn · July 9, 2023 at 3:05 am
HD Adult Clips Collection: https://gotporn.tel/
gurovNor · July 9, 2023 at 4:27 am
На сайте https://takerv.ru много развлечений, лучших слотов от проверенных и надежных производителей, которые предлагают разнообразить досуг и заработать побольше денег. Вы сможете ознакомиться с турнирами прямо сейчас, а также поиграть в Блэкджек, Плинко и другие интересные игры. Дополнительно заработать получится на реферальной программе. Делайте свои ставки и играйте в интересные и увлекательные игры, которые понравятся каждому азартному пользователю. Регулярно на портале появляются новые любопытные развлечения.
정품비아그라구매 · July 9, 2023 at 4:48 am
Very rapidly this website will be famous amid all
blogging visitors, due to it’s pleasant content
MiguelTow · July 9, 2023 at 5:00 am
https://telegra.ph/Ponimanie-osnov-individualnyh-mikrozajmov-07-05
Williamhex · July 9, 2023 at 5:31 am
https://telegra.ph/Kak-nosit-parik-Poshagovoe-rukovodstvo-07-05
Sarah#gruntopf[Beisbaluvwiqobqip,2,5] · July 9, 2023 at 5:56 am
Discover the exhilarating world of [url=https://pouches.killapods.de/]snus coupons[/url] and elevate your senses with our exquisite range of flavors!
Emma#greensmith[Jawulowigizojyna,2,5] · July 9, 2023 at 6:11 am
Discover the exhilarating world of [url=https://pouches.killapods.de/]buy snus discount code[/url] and elevate your senses with our exquisite range of flavors!
Emma#grunblatt[Foluwobuwazumalu,2,5] · July 9, 2023 at 6:21 am
Discover the exhilarating world of [url=https://pouches.killapods.de/]killa snus bestellen[/url] and elevate your senses with our exquisite range of flavors!
Robert#greystone[Janurebihuqewymo,2,5] · July 9, 2023 at 6:31 am
Indulge in the ultimate best [url=https://pouches.killapods.de/]killa coupon[/url] experience with our premium collection of flavors!
get more info · July 9, 2023 at 7:42 am
If you register with us currently, we’ll match your deposit up to $1,
000, and add ann further $25 Freeplay on the house.
Feel free to visit mmy webpage get more info
WayneVer · July 9, 2023 at 8:48 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-bilyard-07-05
Williamhex · July 9, 2023 at 9:44 am
https://telegra.ph/Kak-ukladyvat-parik-dlya-raznyh-sluchaev-07-05
Jamesdup · July 9, 2023 at 10:53 am
Immerse yourself in the world of [url=https://velo1.live/]velo snus[/url]! Discover the unique and premium flavors that we have to offer!
Jamesdup · July 9, 2023 at 10:58 am
Dive into the universe of [url=https://velo1.live/]Velo Nicotine Pouches[/url]! Experience the unique and premium sensations that our products have to offer!
Edwarddup · July 9, 2023 at 11:17 am
Dive into the universe of [url=https://velo1.live/velo-nic-pouches/]velo nic pouches[/url]! Discover the myriad of flavors and premium experiences that await you!
Edwarddup · July 9, 2023 at 11:27 am
Immerse yourself in the world of [url=https://velo1.live/velo-nic-pouches/]VELO[/url]! Experience the exceptional blend of flavors and premium sensations!
Jamesdup · July 9, 2023 at 11:32 am
Step into the new world of [url=https://velo1.live/]VELO 4mg[/url]! Experience the unique flavor profile that has been hand-crafted for nicotine enthusiasts like you!
orbachef · July 9, 2023 at 12:28 pm
На сайте http://prom63.ru вы найдете электронику и автоматику самых популярных брендов. Вся техника надежная, качественная, практичная, потому прослужит очень долго без потери эксплуатационных характеристик. Для того чтобы найти все, что нужно, необходимо воспользоваться специальным фильтром, поиском. Если есть вопросы, то задайте их по телефону. В каталоге вы найдете все, что нужно – можете в этом даже не сомневаться. Действуют приемлемые цены, доступна оперативная доставка. Осуществить покупку вы сможете в любое время.
WayneVer · July 9, 2023 at 12:35 pm
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-basketbol-07-05
house_jef · July 9, 2023 at 1:30 pm
https://barnhouse-pod-kluch.ru
Williamhex · July 9, 2023 at 1:47 pm
https://telegra.ph/Rol-yuridicheskih-firm-v-stroitelnoj-otrasli-Moskvy-07-05
hchegWaw · July 9, 2023 at 2:09 pm
Сайт https://greatly.pro/ представляет собой социальную сеть. Заявите о себе громко для того, чтобы получить поддержку. Имеется раздел с любопытными, интересными страницами, креативными постами. Для того чтобы начать работать, необходимо просто зарегистрироваться на сайте. Если вы талантливы, пишите красивые посты, постоянно выкладываете новые статьи, то вас точно найдут для дальнейшего продвижения. Есть контент на самую разную тему, включая питание, культуру. Заработок зависит от вашей креативности.
urochsnink · July 9, 2023 at 3:44 pm
На сайте https://dombitovok.ru закажите комфортабельные, надежные и практичные бытовки, а также дачные дома, пригодные для проживания. Есть возможность построить брусовые, каркасные, оцилиндрованные дома, изучить каталог бытовок. Перед вами огромный выбор сооружений, которые вы сможете заказать прямо сейчас. Компания «ДОМ БЫТОВОК» работает в этой сфере более 15 лет, а потому знает о предпочтениях потребителя. В работе применяются только качественные, высокотехнологичные материалы, которые наделяют сооружение длительными эксплуатационными сроками.
MiguelTow · July 9, 2023 at 4:20 pm
https://telegra.ph/Vliyanie-snosa-kvartir-na-urovni-shuma-i-vibracii-07-05
WayneVer · July 9, 2023 at 4:29 pm
https://telegra.ph/Kak-ispolzovat-mobilnyj-betting-dlya-zarabotka-07-05
MiguelTow · July 9, 2023 at 8:06 pm
https://telegra.ph/Ispolzovanie-veselyashchego-gaza-pri-neotlozhnyh-dermatologicheskih-procedurah-07-05
WayneVer · July 9, 2023 at 8:43 pm
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-na-aziatskij-gandikap-07-05
vityatrila · July 9, 2023 at 11:09 pm
На сайте http://asutpro.ru вы сможете заказать проектирование электронных устройств. Квалифицированные инженеры и технологи выполнят все работы именно так, как нужно, реализуют идею в сфере разработки электроники. Также доступно программирование микроконтроллеров. При необходимости будет оказана помощь в выборе компонентной базы. Воспользуйтесь такой услугой, как разработка блоков питания. И все это обойдется по привлекательной стоимости, проект реализуется в ограниченные сроки.
MiguelTow · July 9, 2023 at 11:51 pm
https://telegra.ph/Vliyanie-individualnyh-mikrozajmov-na-borbu-s-bednostyu-07-05
ukimmigrationattorneyinus-com.cdn.ampproject.org · July 10, 2023 at 12:10 am
But when Washington wants to remain forward and
achieve the promise of the CHIPS and Science Act, it must act to remove the
pointless complexities to make its immigration system more
transparent and create new pathways for the brightest minds
to.
Feel free to surf to my blog post; UK Immigration Attorney in US
(ukimmigrationattorneyinus-com.cdn.ampproject.org)
alakhdef · July 10, 2023 at 12:28 am
Не забывайте посещать интересный сайт о строительстве и ремонте https://stroyka-gid.ru Много познавательных статей о строительных материалах, планировке, ремонте стен, полов и крыши, и конечно же о строительном инструменте.
WayneVer · July 10, 2023 at 12:49 am
https://telegra.ph/Kakie-zakonodatelnye-izmeneniya-byli-vvedeny-v-Rossii-v-otnoshenii-ispolzovaniya-offshornyh-kompanij-07-05
StevenEromb · July 10, 2023 at 1:49 am
trusted cialis supplier tadalafil cialis pills price
aroslaoptig · July 10, 2023 at 2:55 am
На сайте https://likebtc.ru/ ознакомьтесь со свежими новостями из мира криптовалюты, курсом биткоина, полезными тематическими статьями, техническими анализами, а также индикаторами. Есть любопытные сведения о разных платформах и о том, какую валюту лучше всего майнить, о человеке, придумавшем криптовалюту. Имеется информация о том, стоит ли инвестировать в криптовалюту. Ознакомьтесь с обзорами самых популярных бирж. Статьи сопровождаются картинкой для наглядности. Есть информация и о блокчейн-платформах.
MiguelTow · July 10, 2023 at 3:41 am
https://telegra.ph/Issledovanie-strukturnogo-snosa-kolonn-i-balok-v-kvartire-07-05
WayneVer · July 10, 2023 at 5:02 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-v-rezhime-realnogo-vremeni-07-05
Kennethspica · July 10, 2023 at 5:06 am
Mozilla Firefox скачать
taro_rhymn · July 10, 2023 at 5:17 am
https://megataro.ru/
Michaelcog · July 10, 2023 at 5:51 am
https://www.metal-archives.com/users/bastdipl
Michaelcog · July 10, 2023 at 6:12 am
https://yandex.ru/collections/user/468e9htnpmqq9wgw4ncukx5nfm/zakazali-diplomy-o-srednem-obrazovanii-zelenogradsk/?share=NjRhN2I5Mzk1ZGJiNzFlOTk5YTgzYWFjXzVlODg4ZTUwOGVlNThiMDM2Mjk2ZGIyYQ%3D%3D
Michaelcog · July 10, 2023 at 6:13 am
https://www.steelland.ru/press/4917.html
Michaeldar · July 10, 2023 at 7:17 am
https://metallicheckiy-portal.ru/forum/index.php?action=profile;u=66139
Michaelcog · July 10, 2023 at 7:18 am
http://www.forum.nedug.ru/blog.php?cp=15504
MiguelTow · July 10, 2023 at 7:37 am
https://telegra.ph/Semejnye-meropriyatiya-na-Bajkale-Razvlecheniya-dlya-vseh-vozrastov-07-05
ernyafed · July 10, 2023 at 9:08 am
На сайте https://www.vdgb.ru вы сможете заказать 1С, который создан для автоматизации бизнеса и по привлекательной цене. Воспользуйтесь уникальной возможностью автоматизировать все бизнес-процессы. Компетентные сотрудники осуществят сопровождение, а также внедрение системы, программных продуктов. Доступна разработка индивидуальных решений. Предоставляется весь комплекс услуг, связанных с автоматизацией бухгалтерского, управленческого учета. Воспользуйтесь профессиональными консультациями, обучением пользователей всем нюансам.
WayneVer · July 10, 2023 at 9:20 am
https://telegra.ph/Luchshie-mobilnye-prilozheniya-dlya-stavok-BTTS-obe-komandy-zabyut-07-05
Michaelcog · July 10, 2023 at 9:38 am
https://vk.com/unikvseru?w=wall414329581_5411
Michaelcog · July 10, 2023 at 9:52 am
https://theoryandpractice.ru/users/bastdipl
Michaelcog · July 10, 2023 at 9:54 am
https://freelance.habr.com/freelancers/bastdipl
여성 알바 · July 10, 2023 at 10:19 am
Some students mentioned their parents had disapproved of them looking for jobs iin Japan, she added.
My wweb site; 여성 알바
Michaelcog · July 10, 2023 at 10:43 am
https://teletype.in/@ocenkaru/2TiWNSzTju-
MiguelTow · July 10, 2023 at 11:40 am
https://telegra.ph/Izuchenie-plyusov-i-minusov-individualnyh-mikrozajmov-07-05
buy fake residence card online · July 10, 2023 at 12:53 pm
Hi! Quick question that’s completely off topic. Do you know how to make your site mobile friendly? My site looks weird when viewing from my iphone 4. I’m trying to find a theme or plugin that might be able to correct this problem. If you have any suggestions, please share. Appreciate it!
adimkNEx · July 10, 2023 at 1:38 pm
На сайте https://otdykh-u-morya.ru/ вы сможете получить всю важную информацию относительно отдыха на море и о том, как и где лучше снять гостевой домик, чтобы полноценно отдохнуть. Вас ожидают зеленые улицы, изысканная архитектура, картинг и кинотеатры, а также многое другое, что сделает ваш отдых незабываемым. Перед вами огромный выбор гостевых домов, рассчитанных на несколько комнат. В номерах имеется все необходимое для проживания. Они светлые и комфортные. Во дворе есть зона барбекю, игровая площадка для детей и качели.
MiguelTow · July 10, 2023 at 3:25 pm
https://telegra.ph/Individualnye-mikrozajmy-protiv-grantov-Kakoj-variant-luchshe-07-05
ProFullCrackhit · July 10, 2023 at 5:28 pm
Experience a wealth of Free Software solutions for Windows users at profullcracks.com. Discover the significance of reliable tools that empower you to create striking visuals and captivating videos. Unlock boundless possibilities with our cracked programs, all while maintaining exceptional quality and staying within your budget.
Richardchoon · July 10, 2023 at 5:43 pm
https://www.tumblr.com/basicallyperfectco/714973589698428928/top-10-yoga-pants-tumblr-the-best-collection-of
genadSer · July 10, 2023 at 5:46 pm
Реліквія https://funerals.com.ua/ це сімейне похоронне бюро, яке працює 24 години на добу та надає послуги моргу, ритуальні перевезення, перепоховання, послуги кремації, догляд за могилами на цвинтарі, похорон домашніх тварин та інші ритуальні послуги.
Trevorlaw · July 10, 2023 at 5:48 pm
https://www.tumblr.com/basicallyperfectco/714973525665054720/basicallyperfect
ndreyawage · July 10, 2023 at 5:50 pm
На сайте https://24usa.news/ вы найдете увлекательные новости на такие темы, как: политика, экономика, технологии, спорт, здоровье, общество и другие. Все данные взяты с достоверных источников, поэтому будут интересны каждому. Здесь много информации про США. Имеются заметки о селебрити, популярных личностях, жизнь которых интересна многим. Здесь только свежие, интересные данные на самую разную тему. Опубликованы новости о финансах, бизнесе. Вы узнаете, что говорит пресса о президенте США и его сыне.
ashnimeX · July 10, 2023 at 7:22 pm
На сайте https://lufkad.com/ вы сможете заказать мансардные окна от популярного и надежного производителя LUFKAD, который давно находится на рынке и предлагает только продукцию высокого качества, созданную из высокотехнологичных материалов. По этой причине конструкции становятся выбором многих покупателей. Эта компания полного цикла, а потому она проектирует, выполняет различные испытания, профессиональную установку. Конструкции надежные, качественные и при этом обойдутся недорого.
StevenEromb · July 10, 2023 at 7:33 pm
cialis without insurance canadian pharmaceuticals online tadalafil cialis 5 mg tablet
shiloLoups · July 10, 2023 at 8:18 pm
На сайте https://official-activator.net вы сможете активировать любую программу Windows либо Office абсолютно бесплатно. Эта страница необходима для оперативного скачивания проверенного активатора. Пользоваться всеми опциями сайта вы сможете абсолютно бесплатно. Это позволит вам сэкономить средства. В категории имеются резервные активаторы, которые идеально подходят для более опытных пользователей. Вы сможете воспользоваться всеми ресурсами портала. Если не намерены платить за лицензию, то обойти активацию вам поможет этот сайт.
Michaeldar · July 10, 2023 at 9:13 pm
https://www.airlines-inform.ru/personal/user/?UID=66765
Michaeldar · July 10, 2023 at 10:20 pm
https://www.e-xecutive.ru/users/1886438-roman-nesterov/
Michaeldar · July 10, 2023 at 10:29 pm
https://akniga.org/profile/necterovromik/
Michaeldar · July 10, 2023 at 10:35 pm
https://www.deviantart.com/necterovromik
Michaeldar · July 10, 2023 at 11:56 pm
https://forum.f1news.ru/profile/65426-necterovromik/?tab=field_core_pfield_25
terbinafine without a doctor prescription · July 11, 2023 at 12:03 am
zocor united states zocor 10 mg usa zocor without prescription
xnxx_Gox · July 11, 2023 at 12:27 am
pussy xnxx
avtsovpak · July 11, 2023 at 12:54 am
На сайте https://www.blokprom.ru/categ/penobloki/stenovie/d800/ представлены стеновые пеноблоки D800. Все они выполнены из качественных, надежных материалов, которые устойчивы к воздействию агрессивной среды. Для того чтобы быстрее определиться с выбором, изучите технические характеристики каждой конструкции. Указаны размеры, а также плотность, которые необходимо учесть при покупке. Напротив каждого пеноблока обозначена стоимость. Добавьте необходимое количество конструкций в корзину и оформите заказ. Приобрести все, что нужно, получится в 1 клик.
Michaeldar · July 11, 2023 at 1:01 am
https://anime-chan.me/user/necterovromik/
Michaeldar · July 11, 2023 at 1:51 am
https://www.all-sbor.net/forum/member.php?u=85856
antinRusty · July 11, 2023 at 2:44 am
На сайте https://24ds.org/ ознакомьтесь с интересными новостями, свежей информацией на тему политики, экономики, спорта и многого другого, что будет любопытно каждому. Также имеется информация про культуру и все, что с этим связано. Интервью популярных личностей, политиков, которые оставляют свои комментарии, делятся мнением. Вся информация достоверная, честная, поэтому на нее можно полагаться. Контент составлен высококлассными авторами, которые знают, как привлечь внимание аудитории.
Jackiethulp · July 11, 2023 at 3:39 am
https://pxhere.com/ru/photographer/4040558
karpopeess · July 11, 2023 at 4:42 am
На сайте https://play.google.com/store/apps/details?id=com.leon.beon вы сможете сделать ставки в БК «Леон». Она создана для тех, кто привык делать ставки на спорт в режиме реального времени. Каждое состязание становится более интересным, ярким и незабываемым! У вас появится возможность поставить на баскетбол, футбол, хоккей, теннис, различные спортивные соревнования. И самое главное, что для этого нет необходимости выходить из дома. Анализируется определенное событие, оцениваются возможности соперников, а также шансы на победу.
Jackiethulp · July 11, 2023 at 4:46 am
https://www.airlines-inform.ru/personal/user/?UID=66815
larindip · July 11, 2023 at 4:54 am
На сайте https://play.google.com/store/apps/details?id=com.dev1lsare.red вы сможете сделать ставки в популярной БК «Olimpbet», которая относительно недавно появилась на рынке, но стала одним из его лидеров, поэтому заполучила огромное количество положительных отзывов. БК работает с 2012 года и исключительно на легальной основе. За время работы стала самой узнаваемой и посещаемой букмекерской конторой. Любой пользователь сможет получить безупречный уровень услуг, воспользоваться большим выбором ставок.
Richardchoon · July 11, 2023 at 5:06 am
https://www.tumblr.com/lexi724689787888/721545217649606656/
geniyPlato · July 11, 2023 at 7:16 am
На сайте https://tv6onair.com/ ознакомьтесь с мировыми новостями из самых разных сфер: политика, экономика, спорт, культура. Сегодня в Риме 21 градус. Здесь вы найдете всю свежую и достоверную информацию, которая будет интересна каждому, кто желает быть в теме всего, что происходит в мире. На страницах есть интересные цветные картинки, видеоматериалы, которые помогут лучше ознакомиться с материалами. Имеются мнения первых лиц на сложившуюся обстановку, содержательное интервью. Заходите на портал регулярно, чтобы узнать всю нужную информацию.
Jackiethulp · July 11, 2023 at 7:46 am
http://pax.nichost.ru/forum/view_profile.php?UID=115327
Jackiethulp · July 11, 2023 at 8:56 am
https://forum.wialon.com/profile.php?id=267300
Jackiethulp · July 11, 2023 at 9:49 am
https://forum.nanocad.ru/index.php?/profile/87559-cazonowvpetia/
купить бисер в интернет магазине дешево · July 11, 2023 at 10:49 am
Undeniably believe that that you stated. Your favourite justification appeared to be at the net the simplest thing to bear in mind of. I say to you, I definitely get irked at the same time as other folks consider worries that they plainly do not recognise about. You controlled to hit the nail upon the top as smartly as defined out the whole thing with no need side effect , folks can take a signal. Will likely be back to get more. Thank you
TimothyHen · July 11, 2023 at 11:22 am
https://www.siteanalyzer.net/domain/crackdekstop.com
LeroyVox · July 11, 2023 at 11:42 am
На сайте https://london24news.co.uk/ вы сможете ознакомиться с последними новостями, касающимися самых разных областей, в том числе, экономики, политики, жизни звезд, актеров, депутатов и других. Регулярно в колонке появляются новые данные, которые ответят на многочисленные вопросы. Есть заметки на тематику спорта. Вся информация от экспертов, которые отлично понимают в теме. Регулярно публикуются новости и только из достоверных источников. Для того чтобы найти нужную новость, необходимо воспользоваться специальным поиском.
shenkRon · July 11, 2023 at 11:42 am
На сайте https://from-ua.info/ вы сможете ознакомиться с новостями России, Украины, Белоруссии. Данные касаются экономики, политики, спецоперации на Украине. Имеются и последние новости, касающиеся боевых действий. Все самые значимые, важные новости находятся только на этом сайте, на котором публикуются только свежие данные. Вся информация составлена экспертами, которые знают, какой контент ждет каждый пользователь. Регулярно данные обновляются, чтобы вы были в курсе самых последних событий.
TimothyHen · July 11, 2023 at 11:50 am
https://seoanalyzer.dotseotools.com/domain/crackdekstop.com
TimothyHen · July 11, 2023 at 11:51 am
https://app.mathewdigital.com/domain/crackdekstop.com
Robertgreli · July 11, 2023 at 11:51 am
https://nerohelp.com/17528-ucheba-po-wi-fi.html
Robertgreli · July 11, 2023 at 12:29 pm
http://sosedi-online.ru/voprosyi-i-otvetyi/vyisshee-obrazovanie.html
Robertgreli · July 11, 2023 at 12:55 pm
https://lebed.com/obshhestvo/bakalavriat-i-srednee-professionalnoe-obrazovanie.htm
etisoTrori · July 11, 2023 at 1:00 pm
Стоматологическая клиника Эверест https://everestclinic.com/ на Васильевском острове в Санкт-Петербурге это высокое качество услуг, передовое оборудование, комфортная обстановка и опытные врачи высшей категории всех отраслей стоматологии с различными услугами как лечение и профилактика, протезирование, имплантация зубов, исправление прикуса, детская стоматология.
Robertgreli · July 11, 2023 at 1:01 pm
https://regiontu.ru/2019/08/07/zachem-poluchat-vysshee-obrazovanie/
Robertgreli · July 11, 2023 at 1:24 pm
https://center-bereg.ru/preimushhestva-nalichija-diploma-o-vysshem-obrazovanii-dlja-karery.html
Zita · July 11, 2023 at 1:25 pm
Typically, the greater the resolution and included tech features, the greater the value tag. A nanny cam’s value usually raises with further characteristics, like 24/7 streaming, night vision, and lens good quality.
Also visit my web blog http://Rapz.ru/user/JeniferYamamoto/
Robertgreli · July 11, 2023 at 2:29 pm
https://library.by/portalus/modules/pedagogics/readme.php?subaction=showfull&id=1549206543&archive=&start_from=&ucat=&
gleboagova · July 11, 2023 at 3:43 pm
По ссылке https://play.google.com/store/apps/details?id=com.leon.beon ознакомьтесь с БК «Леон», которая работает специально для вашего развлечения. Есть возможность заказать пари на марафоны, турниры, различные топовые развлечения, принять участие в программе лояльности. Постоянно на официальном сайте регистрируются новые игроки, которые желают поймать свою удачу. Компания постоянно предоставляет возможность воспользоваться огромным количеством бонусов, интересных предложений.
Robertgreli · July 11, 2023 at 4:32 pm
https://manprogress.com/ru/blogs/50/posts/1011.html
Robertgreli · July 11, 2023 at 4:52 pm
https://iinews.ru/diplom-vuza-mozhno-poluchit-za-5-dnej/
dom_rhymn · July 11, 2023 at 4:54 pm
дом шалаш
GerryTum · July 11, 2023 at 5:14 pm
делать презентации на заказ
GerryTum · July 11, 2023 at 6:42 pm
решение логических задач онлайн
Richardchoon · July 11, 2023 at 6:56 pm
https://vk.com/wall-220011242_1
Robertgreli · July 11, 2023 at 7:04 pm
https://moi-goda.ru/kaleydoskop/interesnie-fakti-ob-obrazovanii-so-vsego-sveta
donovBeisp · July 11, 2023 at 7:15 pm
На сайте https://lepolitique.net/ вы почитаете самые последние политические новости, которые будут интересны всем, независимо от социального статуса, возраста и других моментов. Выдвигаются шокирующие гипотезы, любопытные мысли, которые будет важно узнать каждому. Весь контент составлен высококлассными авторами, которые знают, что будет интересно читателям. Регулярно появляются новые статьи, которые сопровождаются цветными картинками для достоверности фактов. Почитайте новости сейчас.
Trevorlaw · July 11, 2023 at 7:46 pm
https://www.tumblr.com/basicallyperfectco/714973611236163584/cork-yoga-block-set-of-2-eco-friendly-and
GerryTum · July 11, 2023 at 8:12 pm
контрольная по английскому языку
Robertgreli · July 11, 2023 at 8:22 pm
http://ulgrad.ru/?p=180501
Robertgreli · July 11, 2023 at 8:30 pm
https://vsetke.ru/pokupka-diploma/
ikhailson · July 11, 2023 at 8:37 pm
На сайте https://xn--80aaokkaleptf.xn--p1ai/ находится огромный выбор маленьких камер, которые удобно брать на экзамен. При этом устройства самых малых размеров. Если до экзамена осталось совсем мало времени, то скорей покупайте функциональное и умное устройство, которое обязательно вас выручит. Оно простое в управлении. При этом камеры обойдутся вам недорого, доступна быстрая доставка по всей России. До совершения покупки ознакомьтесь с наиболее часто задаваемыми вопросами. На все микронаушники, камеры дается гарантия – 1 год.
yelizadiura · July 11, 2023 at 8:39 pm
На сайте https://europennews.com/ вы найдете самые последние и актуальные новости на разную востребованную тему, включая экономику, финансы, бизнес, окружающую среду, здоровье, спорт. Они будут интересны всем, без исключения. Кроме того, есть информация на тему курса валюты, биткоина. Есть раздел на тему бизнеса. Также представлены интересные видеоматериалы, картинки. Регулярно публикуются новые данные, которые необходимо почитать всем, кто интересуется этой темой. Здесь только факты, нет выдуманных историй.
GerryTum · July 11, 2023 at 9:41 pm
реферат по математике
Robertgreli · July 11, 2023 at 10:14 pm
https://www.tatarstan-mitropolia.ru/useful/?id=13358
rgunoDip · July 11, 2023 at 10:34 pm
Профессиональная стоматология https://orlovskydentalpro.ru/ Орловских в городе Калуга это высокое качество услуг, передовое оборудование, комфортная обстановка и опытные врачи высшей категории всех отраслей стоматологии с различными услугами как лечение и профилактика, протезирование, имплантация зубов, исправление прикуса, детская стоматология.
MeatVqrzfinnagt · July 11, 2023 at 10:54 pm
This is the original site for selling [url=https://somonion.com/]Monthly car rental in dubai[/url].
GerryTum · July 11, 2023 at 11:10 pm
курсовая работа
Robertgreli · July 12, 2023 at 12:16 am
https://gorod342.ru/plugins/p_ckeditor/old-editor/plugins/specialchar/dialogs/lang/ru/4/3/news/145_kak_poluchit_diplom_.html
genadStorm · July 12, 2023 at 12:23 am
На сайте https://play.google.com/store/apps/details?id=com.dev1lsare.red воспользуйтесь услугами онлайн-букмекера. Он предлагает игрокам широкую линию различных спортивных состязаний, а также высокие коэффициенты. И самое важное, что выигрыши выплачиваются оперативно, без обмана. Уже многие определили то, что Олимпбет является надежной конторой, которая стала известна еще давно. Игроки отметили преимущества БК, ведь здесь действительно можно выиграть, а сотрудничество происходит на максимально прозрачных условиях.
Robertgreli · July 12, 2023 at 12:35 am
http://ru-ipad.org/articles/7730-tri-sposoba-prodvizheniya-biznesa-dlya-novichkov-s-diplomom-i-bez.html
GerryTum · July 12, 2023 at 12:40 am
контрольная по физике
Finleyempixelm · July 12, 2023 at 1:24 am
see this page
amoylSnill · July 12, 2023 at 2:30 am
На сайте https://dombitovok.ru/ вы сможете воспользоваться услугами строительной компании, которая производит бытовки, комфортные дачные дома. Регулярно проводятся акции, которые позволяют существенно сэкономить. Есть возможность заказать оцилиндрованные, каркасные, брусовые, дачные дома, выполненные из надежных, качественных материалов и с высокотехнологичной обработкой. Дачные домики различной площади, что дает возможность подобрать решение, учитывая свои предпочтения.
Corine · July 12, 2023 at 5:42 am
Hello, i read your blog from time to time and i own a similar
one and i was just curious if you get a lot of spam remarks?
If so how do you protect against it, any plugin or anything
you can recommend? I get so much lately it’s
driving me mad so any assistance is very much appreciated.
Feel free to visit my blog post … Corine
Richardchoon · July 12, 2023 at 8:42 am
https://www.tumblr.com/basicallyperfectco/714973633148223488/jai-yoga-mats-basicallyperfect
antipDom · July 12, 2023 at 8:46 am
На сайте https://minicamera.ru приобретите микрокамеры, а также миникамеры, WiFi камеры, 4G камеры с сим картой и многое другое от лучших, зарекомендовавших себя марок. Есть раздел с самыми выгодными предложениями, которые приобретают многие. В каталоге имеются и автономные Wi-Fi камеры, которые будут работать бесперебойно, качественно. Ознакомьтесь с самыми маленькими камерами. Устройства помогут вам узнать, насколько тщательно персонал справляется с работой и находится ли ваш ребенок в безопасности.
Josephchuck · July 12, 2023 at 9:26 am
создание лендинга
pirogi_viess · July 12, 2023 at 9:45 am
пироги официальный сайт москва цены доставка https://pirogi-farn.ru/
Trevorlaw · July 12, 2023 at 9:51 am
https://twitter.com/basicallyp77310/status/1648430351658926083
Josephchuck · July 12, 2023 at 11:48 am
сео продвижение сайта заказать
Josephchuck · July 12, 2023 at 12:10 pm
раскрутка сайтов цена
volodyRag · July 12, 2023 at 1:29 pm
На сайте https://invesloan.com/ представлена актуальная и интересная информация, свежие новости, которые касаются самой разной темы, включая экономику, политику, а также искусство, спорт, развлечения. Кроме того, имеются данные на тему финансов, курса валют и биткоина. Опубликованы самые последние новости, события, произошедшие только сегодня и несколько часов назад. Они ответят на многочисленные вопросы. Есть любопытный раздел на тему «Рынки», где рассматриваются фьючерсы, доллар, азиатская валюта и многое другое.
Donalduserm · July 12, 2023 at 3:30 pm
Привет! Я недавно зарегистрировался в Cat Casino, и мне нравится его официальный сайт. Кэт Казино предлагает широкий выбор игр и уникальный игровой опыт. Регистрация в Cat Casino была быстрой и простой – всего несколько шагов, и я уже мог наслаждаться азартом. Кроме того, я использовал зеркало Cat Casino для доступа к сайту без проблем. Вход в Cat Casino теперь для меня удобен и легок. Рекомендую всем азартным любителям попробовать свою удачу в Cat Casino!
moiseesmupt · July 12, 2023 at 7:17 pm
На сайте https://hd.lordfilm.ws/43-bo-boicya-film-2023-04 имеются фильмы самого разного жанра, включая триллеры, драмы, мелодрамы, комедии. Также подобраны и сериалы, которые хочется смотреть бесконечно и радоваться четкой картинке. Все фильмы отличного качества, с хорошим звуком, качественным переводом, поэтому точно понравятся даже самому притязательному киноману. Есть новинки 2023 года, которые только что вышли на экраны. Если хотите найти определенный фильм, то воспользуйтесь поиском. Добавляйте фильм в «Избранное», чтобы посмотреть его в наиболее удобное время.
afanaskah · July 12, 2023 at 8:25 pm
На сайте https://xn—-7sbbhfai6cgwcewu4mwb.xn--p1ai/ вы сможете заполнить форму для того, чтобы с вами связалась круглосуточная ритуальная диспетчерская служба. Воспользуйтесь готовыми пакетами услуг, чтобы подобрать достойный для усопшего вариант, а для себя – идеальный по бюджету. Имеется и социально-бюджетный пакет, а также премиального уровня. Но важно учесть, что расценки предлагаются в ознакомительных ценах. Также можно воспользоваться и услугами крематория. Для того чтобы сделать все необходимые расчеты, воспользуйтесь специальным калькулятором.
Richardchoon · July 12, 2023 at 8:34 pm
https://www.tumblr.com/lexi724689787888/721545235434471424/
nstankapse · July 12, 2023 at 8:58 pm
На сайте https://tinycam.ru приобретите миниатюрные, автономные камеры, а также мини камеры, которые отличаются высоким качеством. А самое главное, что они сделаны именитыми брендами и с использованием уникальных и инновационных технологий. Устройства будут работать долгое время и четко передавать изображение. Доставка осуществляется по всей России. Оплата может происходить в режиме онлайн, но можно заплатить и наличными после получения. Доступны скидки, размер которых рассматривается индивидуально.
Trevorlaw · July 12, 2023 at 9:27 pm
https://twitter.com/basicallyp77310/status/1648429820639084544
seo_jef · July 12, 2023 at 10:32 pm
seo оптимизация сайта москва https://seo-v-moskve.ru/
Seo_rhymn · July 12, 2023 at 10:41 pm
seo продвижение тюмень https://seo-v-tumeni.ru/
fishing_Gox · July 13, 2023 at 4:20 am
fishing tackle https://fishingrodquide.com
Richardchoon · July 13, 2023 at 6:21 am
https://vk.com/wall-220011242_6
tolyaspisy · July 13, 2023 at 7:15 am
На сайте
https://lu.lordfilms.one/62503-mazhory-na-meli-film-2021-17 вы сможете посмотреть интересные, интригующие фильмы, которые в отличном качестве и в высоком разрешении. Все они с хорошим звуком, поэтому дарят отличное настроение. Представлено очень много многообещающих новинок как отечественного, так и зарубежного производства. В каждом кино играют полюбившиеся талантливые актеры. Заходите на портал регулярно, чтобы посмотреть фильмы тогда, когда хочется. Все они в огромном многообразии и различного жанра.
zhdanmeN · July 13, 2023 at 9:11 am
На сайте https://ostrov-nevest.ru/services каждая невеста подберет для себя автомобиль для свадебного кортежа. Есть самые разные варианты, включая Mercedes-Benz представительского класса, Porsche Cayenne и другие. Все автомобили находятся в технически исправном состоянии, в салоне чисто, ухоженно. Автомобили регулярно проходят ТО. Выбирайте тот вариант, который вас гарантированно устроит. И при этом расценки остаются на доступном уровне. Вы сможете заказать и кабриолет. Для того чтобы ознакомиться с вариантом поближе, просто нажмите на графу «Подробнее».
gusevSpock · July 13, 2023 at 1:48 pm
На сайте https://redico.ru/ воспользуйтесь услугами компании «REDICO», которая в течение долгого времени занимается сертификацией услуг и товаров. В компании работают компетентные, опытные сотрудники, которые берутся за оказание услуги различной сложности. Заказать бесплатный расчет стоимости вы сможете прямо сейчас. Специалисты подходят со всей ответственностью к выполнению каждой заявки. Огромный опыт позволяет сразу составить план действий. Компания стремится к предоставлению сервиса высокого уровня.
Payments_rhymn · July 13, 2023 at 5:03 pm
банковские счета за рубежом
nekraGef · July 13, 2023 at 7:03 pm
На сайте https://hd.lordfilmy-film.online/63881-mir-yurskogo-perioda-gospodstvo-jurassic-world-dominion-2022 представлены интересные, увлекательные, любопытные фильмы: драмы, триллеры, комедии, ужасы и многое другое. Имеются многообещающие сериалы, кино, аниме, новинки 2023 года. Их необходимо посмотреть каждому киноману. Регулярно появляются интригующие новинки в отличном качестве, с хорошим звуком. Их можно посмотреть не только большой компанией, но и со своей второй половинкой. Из всего многообразия вы обязательно подберете то, что нужно. И важно то, что за посещение нет необходимости платить.
pokrolibly · July 13, 2023 at 7:36 pm
https://www.xn--80abveqcgpdlu.xn--p1ai/ это сайт, который предоставляет возможность забронировать авиабилеты и отели онлайн. Есть удобный поиск по различным направлениям и фильтрам, что позволяет быстро найти подходящий вариант. Можно забронировать авиабилеты любых авиакомпаний и отели различных категорий, от бюджетных до премиум-класса. Кроме того, на сайте можно получить информацию о расписании рейсов и наличии мест на них.
Бронируй сам – это удобный и надежный сервис для тех, кто хочет сэкономить время и деньги при планировании своей поездки.
antosPyday · July 13, 2023 at 8:26 pm
Сайт https://dooby.ru представляет собой доску объявлений, на которой вы найдете объекты недвижимости, хостелы, отели, транспорт, детские товары, а также все для спорта, отдыха, стройматериалы. Все это вы сможете приобрести прямо сейчас и по выгодной цене. Все сделки совершаются абсолютно безопасно, а потому данные банковской карты точно не попадут третьим лицам. Кроме того, можно воспользоваться огромным количеством услуг. Есть идеи для бизнеса – они представлены в отдельном разделе.
gtyareGycle · July 13, 2023 at 8:55 pm
На сайте http://z-news.link/ опубликованы новости на самую разную тему, включая политику, экономику, культуру, путешествия, технологии, игры, автомобили, медицину. Есть и фоторепортажи. Выберите нужную категорию для того, чтобы ознакомиться с материалом поближе. Имеются данные, касающиеся конфликта на Украине. Все статьи свежие, актуальные, а потому из них вы узнаете много нового. Записи сопровождаются картинкой для наглядности. Новости составлены высококлассными авторами, отлично разбирающимися в данной теме.
zuyevtwive · July 13, 2023 at 9:12 pm
На сайте https://sdampodkluch.ru/ получите всю важную и необходимую информацию, которая касается ремонта и правил его проведения. Так вы узнаете то, с чего лучше всего начать, какие материалы необходимо использовать и многое другое. Есть любопытный материал о дизайне, кухне, окнах, кровли, ремонте в санузле, о полах, стенах и фасаде. Все статьи очень интересные, качественные, экспертные, а потому их читать – одно удовольствие. Регулярно появляются свежие записи, которые будет интересно изучить всем, кто занимается ремонтом или только планирует его.
zhenkaSaf · July 13, 2023 at 9:27 pm
На сайте https://www.parvenik.ru/ вы сможете приобрести дубовые, березовые, эвкалиптовые веники, либо хвойные. Также есть и травы в пучках, мешочках, различные эфирные масла, чай для бани, состоящий из целебных трав. Здесь установлены только приемлемые цены, действует оперативная доставка. Имеется раздел с рекомендуемыми товарами, которые являются выбором многих. Для производства продукции применяется исключительно отборное, обработанное уникальным методом сырье. Именно поэтому вы получите только пользу.
spiridbum · July 13, 2023 at 11:32 pm
На сайте https://fei36.ru можно найти для интересных и увлекательных встреч для себя красивую спутницу, помогающую скрасить время вечером или в другое время суток. Красивая представительница прекрасной половины человечества непременно сможет помочь каждому мужчине, вне зависимости от его возраста, получить ощутимое, неизвестное доселе удовольствие. Подобрать для себя индивидуальную спутницу, для которой полностью отсутствуют ограничения и комплексы, вполне реально может абсолютно каждый мужчина, желающий скрасить скучные будни либо отдохнуть после трудных дней.
roslaTex · July 14, 2023 at 4:35 am
Демонтажные работы в Екатеринбурге https://snos96.ru/ – это важный этап строительства. Наша компания предлагает профессиональные услуги по демонтажу и сносу зданий в Екатеринбурге. Мы работаем с различными типами сооружений, включая жилые дома, коммерческие здания, промышленные объекты и другие. Наши специалисты имеют большой опыт работы в этой области и используют современное оборудование и технологии. Мы гарантируем высокое качество работ и соблюдение всех норм безопасности. Мы готовы выполнить любые задачи в кратчайшие сроки. Мы также предлагаем услуги по вывозу мусора и утилизации отходов, что позволяет нашим клиентам сэкономить время и деньги.
echkaUnaph · July 14, 2023 at 6:57 am
На сайте https://growex-group.ru/ оформите заявку на морские перевозки, авиаперевозки, а также автоперевозки. В компании можно осуществить и таможенное оформление на любом посту РФ. Есть возможность заказать перевозку скоропортящегося, опасного груза, самоходной, колесной техники, танк контейнеров, ветеринарных, негабаритных, акцизных грузов. Предусмотрен электронный документооборот, личный менеджер, бесплатные консультации, работы под ключ, страхование ответственности.
linktree_emaic · July 14, 2023 at 7:10 am
free linktree alternative https://linktree-alternative.com
morguSpiva · July 14, 2023 at 7:23 am
На сайте https://gamingoff.ru/wiki-witcher3/ вы отыщите все схемы прохождения основных сюжетов, а также различных квестов. Также вы узнаете и про заказы, о том, как правильно охотиться за сокровищами в такой популярной игре, как «Ведьмак 3: Дикая охота». На этом сайте вы получите и другую важную информацию. К примеру, о том, как правильно запустить игру. Это позволит убедиться в том, что система отвечает необходимым параметрам. На портале представлена и другая важная информация, которая будет вам необходима.
BitcVwrwfinnagt · July 14, 2023 at 8:27 am
This is the best site for selling [url=https://exchanger24.org/xchange_btc_to_ppusd/]Bitcoin to PayPal[/url].
cost of glimepiride · July 14, 2023 at 8:31 am
levofloxacin purchase levofloxacin cost levofloxacin over the counter
ezrukocaf · July 14, 2023 at 9:44 am
На сайте https://www.debtconsolidationg.com вы получите информацию, которая касается того, что такое консолидация долга. Если необходимо узнать то, как выбраться из долгов, то ознакомьтесь с той информацией, которая присутствует на этом портале. Вы сможете воспользоваться бесплатной консультацией прямо сейчас. Здесь находится вся полезная, нужная информация, которая будет необходима и вам. Весь материал составлен экспертами, разбирающимися в таких вопросах. Если и у вас возникли проблемы, то получить ответ на вопрос вы сможете здесь.
Имплантация зубов · July 14, 2023 at 12:03 pm
[url=https://implantaciya-zubov-v-msk.ru/]Имплантация зубов[/url]
Автор видим, яко установка имплантов – этто отличный эффект, позволяющий долго упиваться неплохой улыбкой. То-то вы в силах непременно убеждены в течение этом, яко в Столице хорэ предложено качественное эндодонтия и хорошо обмысленная стоимость имплантации зубов.
Имплантация зубов
телекоммуникационные · July 14, 2023 at 12:08 pm
[url=https://telekommunikacionnyj-shkaf.ru/]Шкафы 42U телекоммуникационные[/url]
коммутационный шкаф – высота 42U – глубина 1000 миллиметр – широта 800 миллиметров – сменные боковые панели – янус электростекло
Шкафы 42U телекоммуникационные
essonPom · July 14, 2023 at 1:37 pm
On the site https://weirdholiday.com/ you can get acquainted with the strange holidays that occur every day of the year. Information about unofficial holidays and nationally and globally recognized official holidays is all on our Weird Holiday website.
verevbub · July 14, 2023 at 3:50 pm
На сайте https://prostitutki59.ru вы сможете выбрать для себя девушку для того, чтобы незабываемо, интересно провести время с красивой, миловидной и нежной девушкой, которая будет очень внимательна к вашим предпочтениям и учтет все пожелания. Напротив, каждой из них имеется описание, параметры фигуры, возраст. Кроме того, вы узнаете и о том, в какую цену вам обойдутся ее услуги. Все девушки ухоженные, красивые, отличаются привлекательной внешностью и подтянутой, стройной фигурой. Можно заказать даму на самое разное количество времени
Samueldup · July 14, 2023 at 3:54 pm
Experience the revolution in nicotine consumption with [url=https://nicotine-pouches.store/]nicotine pouches[/url]! Discover a variety of flavours and strengths that cater to every taste!
Anttidup · July 14, 2023 at 4:09 pm
Koe nikotiinin kulutuksen vallankumous [url=https://nikotiinipussi1.site/]Nikotiinipussi[/url]:n avulla! Loyda erilaisia makuja ja vahvuuksia, jotka vastaavat jokaiseen makuun!
Jamesdup · July 14, 2023 at 4:16 pm
Step into the realm of unparalleled flavour and satisfaction with our [url=https://velo1.live/]Velo Mini Nicotine Pouches[/url]. A whole new world of unique and superior taste awaits you!
Johndup · July 14, 2023 at 4:23 pm
Dive into an invigorating experience with [url=https://lyft1.bio/]LYFT VELO[/url], where quality meets satisfaction. Explore a myriad of flavors that cater to your unique palate!
Jamesdup · July 14, 2023 at 4:30 pm
Experience the exciting fusion of flavor and satisfaction with our [url=https://velo1.live/]VELO Slim[/url] collection. A world of distinct and superior taste awaits you!
Benjamindup · July 14, 2023 at 5:43 pm
Dive into a vibrant symphony of flavors with our [url=https://pouches.killapods.de/]killa snus[/url]. Each pouch offers a unique blend of tastes that will transport you to a new world of sensory delight!
Jonathandup · July 14, 2023 at 5:56 pm
Step into a world of exquisite flavor with our [url=https://velo1.live/]best snus[/url]. Each pouch is a journey, carefully crafted for your delight!
iryayeBip · July 14, 2023 at 6:05 pm
На сайте https://office-activator.com представлены основные активаторы, которые используются для Microsoft Office. На этом портале каждый желающий получает возможность скачать активаторы для различных версий, а также дополнений софта. Также получится скачать программу абсолютно бесплатно. И это полностью безопасно. К инструкциям имеются видеоматериалы, фотографии. Это позволит лучше определиться с тем, что необходимо для активации. Инструкция описана максимально подробно, чтобы вы все поняли.
ekhovfug · July 14, 2023 at 6:53 pm
На сайте https://berg-compreccor.com/ вы сможете оформить заявку для того, чтобы получить консультацию по поводу покупки компрессоров марки BERG. Это один из лидеров данного сегмента. Вся техника отличается эталонным качеством, привлекательной стоимостью, долгим сроком службы. На каждом этапе производства техника проходит строгий контроль на соответствие самым высоким требованиям. Применяется в области энергетики, судостроительном производстве, на газодобывающих предприятиях.
evgenspeaw · July 14, 2023 at 6:56 pm
Our team will https://receptionevent.com/ organize and hold an event of any format and scale. We will develop a unique concept and plot regardless of the number of guests and geographical location. Every client is important to us, so we guarantee a first-class level of organization and confidentiality.
urochAlono · July 14, 2023 at 7:29 pm
На сайте https://hvostatic.ru получите всю необходимую информацию обо всех породах собак. Перед вами добрые породы собак, которые станут вашим компаньоном, другом и помощником. Вы сможете почитать информацию о каждом виде животного, чтобы потом сделать правильный выбор в пользу того или иного животного, если хотите завести питомца. Для того чтобы найти определенную породу, необходимо воспользоваться специальным поиском. Он обязательно подберет нужный вариант. На портале представлена наиболее полная и исчерпывающая информация о собаках.
ProFullCrackbons · July 14, 2023 at 7:30 pm
FastStone Capture 9.9 Crack and Keygen New 2023 Download
insta_Gox · July 14, 2023 at 9:06 pm
ikeymonitor instagram https://instagram-anonymous-story.com/
ezhovkes · July 14, 2023 at 9:59 pm
На сайте https://gruz63.ru/gruzoperevozki/ вы сможете воспользоваться такой необходимой и важной услугой, как грузоперевозки на Газели. В компании у вас получится заказать еще и перевозку строительного мусора, быструю доставку предметов мебели из магазина. Перевозки осуществляются по всей РФ. Чуть ниже представлены расценки на работы. Также есть отзывы клиентов, которые решили воспользоваться услугами и не пожалели. Воспользуйтесь и вы услугой, которая может пригодиться в любой момент.
BitcVgtffinnagt · July 14, 2023 at 10:40 pm
This is the best site for [url=https://exchanger24.org/]Bitcoin exchange[/url].
michesox · July 14, 2023 at 10:42 pm
Авто в рассрочку https://xn—–6kcchb2d1aesblag0a6d.xn--p1ai/ это уникальная возможность приобрести автомобиль не оплачивая за него сразу всю сумму. Доступность для каждого и удобный график платежей позволяют не перегружать свой бюджет.
rem-dom-stroy.ru · July 14, 2023 at 10:59 pm
Greetings! This is my first visit to your blog! We are a group of volunteers and starting a new initiative in a community in the same niche. Your blog provided us useful information to work on. You have done a marvellous job!
KOJUIE · July 15, 2023 at 12:24 am
I have been exploring for a little bit for any high-quality articles or blog posts in this kind of area .
Exploring in Yahoo I at last stumbled upon this website.
Reading this info So i’m happy to convey that I’ve an incredibly just right uncanny feeling I found out just what I needed.
I such a lot certainly will make sure to do not overlook this website and give it a look on a constant basis.
Jerrygeate · July 15, 2023 at 1:53 am
https://www.vingle.net/posts/6003537
alugireere · July 15, 2023 at 4:39 am
На сайте https://www.diplomshop.net/ вы сможете заказать и купить диплом на оригинальном бланке с доставкой по России. Приемлемые цены, гарантия. Ознакомьтесь с полным ассортиментом на сайте.
ostyashups · July 15, 2023 at 6:40 am
На сайте https://j-center.ru/ изучите преимущества обучения в школе парикмахерского искусства «J-center Studio». Здесь преподают лучшие учителя, которые расскажут вам всю ту информацию, которую знают сами. К важным достоинствам обучения в школе Юлии Бурдинцевой относят то, что оно проходит на клиентах. Вас ожидает минимальное количество теории, в основном только практика. Все, кто закончил школу, получают огромный опыт, а потому получится устроиться в самый престижный салон. Пройдите обучение и вы.
nonovvat · July 15, 2023 at 6:53 am
На сайте https://parus-rent.ru/ вы сможете оформить заявку для того, чтобы арендовать дорожную технику как в Москве, так и Московской области. В арсенале предприятия находятся следующие единицы: компрессоры, осветительные мачты, генераторы, виброплиты, нарезчики швов, катки, затирочные машины и многое другое. Компания находится на рынке, начиная с 2009 года, а потому точно знает, какая техника прослужит долго, никогда не подведет и будет служить долго. Она стремится удовлетворить потребности клиента, чтобы он получил именно тот результат, который планировал.
hmelefrels · July 15, 2023 at 7:40 am
Авто из Германии https://xn—-2-5cdcjjqpjfa3cpg2b0a.xn--p1ai/ это возможность привезти автомобиль из Европы по приятным ценам. Надежные автомобили из Германии, качественной сборки прослужат вам долгие годы. А цена на авто из Германии приятно удивят каждого.
Dom_rhymn · July 15, 2023 at 9:12 am
дом из бруса купить
Matthewempixelm · July 15, 2023 at 9:37 am
remГЁdes maison pour le mal des transports
Paharganj escort · July 15, 2023 at 9:43 am
You are so cool! I don’t think I have read through a single thing like that before.
So good to find someone with a few unique thoughts on this issue.
Really.. thank you for starting this up. This
web site is one thing that is required on the web, someone
with some originality!
rybaktreno · July 15, 2023 at 10:08 am
На сайте https://agsvv.ru/ вы сможете заказать звонок для того, чтобы получить исчерпывающую консультацию. Вся медтехника представлена от производителя, а потому и наценки минимальные при гарантированно высоком качестве. Есть возможность сделать приобретение как оптом, так и в розницу. Здесь есть все, что необходимо, включая облучатели, которые лечат кожные заболевания, голосообразующие аппараты, рециркуляторы. Вся техника создана по уникальным разработкам. Она безупречного качества и реализуется по доступной стоимости.
BrianDet · July 15, 2023 at 12:13 pm
Я полностью доволен сайтом Гама Казино! Здесь я нашел все, что мне нужно для захватывающей игры – от разнообразных слотов до классических настольных игр. Бонусы и акции делают игру еще интереснее. Сайт Гама Казино прост в использовании и имеет удобный дизайн. Очень рекомендую!
WesleyJew · July 15, 2023 at 12:54 pm
https://able.extralifestudios.com/wiki/index.php/User:ElizbethMadgwick
JamesGed · July 15, 2023 at 1:09 pm
https://wiki.nerdyaddict.com/index.php?title=User:DorthyMassie72
tvprog_viess · July 15, 2023 at 1:12 pm
программа на луганск 24 на сегодня
порно видео · July 15, 2023 at 1:12 pm
порно видео
WesleyJew · July 15, 2023 at 1:23 pm
https://www.hb9lc.org/wiki/index.php/%D0%9A%D1%83%D1%80%D1%81%D1%8B_%D0%A0%D0%B0%D0%B7%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%BD%D0%BE%D0%B3%D0%BE_%D0%90%D0%BD%D0%B3%D0%BB%D0%B8%D0%B9%D1%81%D0%BA%D0%BE%D0%B3%D0%BE_%D0%AF%D0%B7%D1%8B%D0%BA%D0%B0:_%D0%9A%D0%B0%D0%BA_%D0%9B%D0%B5%D0%B3%D0%BA%D0%BE_%D0%98_%D0%AD%D1%84%D1%84%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D0%BD%D0%BE_%D0%9E%D1%81%D0%B2%D0%BE%D0%B8%D1%82%D1%8C_%D0%A0%D0%B0%D0%B7%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%BD%D1%8B%D0%B9_%D0%9D%D0%B0%D0%B2%D1%8B%D0%BA
WesleyJew · July 15, 2023 at 1:23 pm
http://startflag.rulez.jp/index.php/%E5%88%A9%E7%94%A8%E8%80%85:HolleyKirsch
JamesGed · July 15, 2023 at 1:52 pm
https://www.dermo.wiki/index.php?title=%D0%9A%D1%83%D1%80%D1%81_%D0%90%D0%BD%D0%B3%D0%BB%D0%B8%D0%B9%D1%81%D0%BA%D0%BE%D0%B3%D0%BE_%D0%A0%D0%B0%D0%B7%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%BD%D0%BE%D0%B3%D0%BE_%D0%AF%D0%B7%D1%8B%D0%BA%D0%B0
JamesGed · July 15, 2023 at 2:21 pm
https://taupi.org/index.php?title=User:KamiBarcenas
JamesGed · July 15, 2023 at 2:28 pm
https://deadreckoninggame.com/index.php/User:LeifFitzgibbons
WesleyJew · July 15, 2023 at 2:30 pm
https://wiki.labnuevoleon.mx//index.php?title=Usuario:JohnieFields0
pokemon online · July 15, 2023 at 2:31 pm
Very good article. I certainly love this website.
Keep it up!
JamesGed · July 15, 2023 at 2:54 pm
https://www.kolbenklopper.net/moto-wiki/index.php?title=Benutzer:ColumbusGeq
echkaSak · July 15, 2023 at 3:22 pm
На сайте https://diplompro.com/ вы сможете ознакомиться с каталогом дипломов ВУЗов, аттестатами, справками, удостоверениями – заказать и купить их без предоплаты. Отличные цены, большое разнообразие, огромный каталог услуг.
syushsiz · July 15, 2023 at 4:39 pm
https://xn—-2-5cdkcuoi2dgmlu9l.xn--p1ai/ это удобный способ купить автомобиль из Европы по отличным ценам, привлекательным условиям, что позволит сэкономить и ваш бюджет и передвигаться на европейском автомобиле.
AlbertSep · July 15, 2023 at 5:13 pm
недвижимость тюмень
charovFlict · July 15, 2023 at 5:58 pm
На сайте https://moyasimka.ru/ представлены сим карты, тарифы. Есть раздел с самыми лучшими, проверенными тарифами ушедшего года. Здесь же вы сможете ознакомиться с безлимитными сим картами для интернета, а также звонков и интернета. При необходимости вы сможете приобрести и модем. Есть и товар дня, который вы сможете купить по отличной стоимости и с хорошей скидкой. На каждую симку предоставляется гарантия. Если есть вопросы, то обратитесь в техническую службу. Менеджеры обязательно ответят на них.
oronkHoony · July 15, 2023 at 6:47 pm
На сайте https://izumrudprint.ru/ можно заказать самые разные виды печатной продукции. Инженеры не только выполняют все необходимые работы, но и разработают концепцию дизайна. Вы сможете заказать печать календарей, книг, визиток, различную другую полиграфическую продукцию. У вас есть возможность заказать оперативную цифровую печать. Есть возможность выполнить заказы самой разной сложности и в любом объеме. В цехах находится современное оборудование, которое позволяет создавать качественную продукцию, а вот брак отсутствует.
AlbertSep · July 15, 2023 at 6:50 pm
недвижимость длительный срок
CharlesDOR · July 15, 2023 at 8:06 pm
заказать сео продвижение
AlbertSep · July 15, 2023 at 8:25 pm
кадастровый номер объекта недвижимости
Jerrygeate · July 15, 2023 at 9:31 pm
http://haneularthall.com/bbs/board.php?bo_table=board_43&wr_id=202054
AlbertSep · July 15, 2023 at 9:59 pm
справочная информация по объектам недвижимости
nisimDek · July 15, 2023 at 10:20 pm
Агентство интернет маркетинга полного цикла https://adsme.pro/ от разработки сайта до продвижения и рекламы вашего бизнеса. AdsMe выведет ваш интернет-магазин на новый уровень продаж, создадим качественный сайт, настроим контекстную рекламу в google и яндекс, займемся seo продвижением, запустим таргетированную рекламу в социальных сетях. За такой комплекс маркетинговых услуг мы сделаем скидку позволит получать часто Лиды круглый год. Работаем по всему миру на русском и английском языке. Офисы в Москве, Минске, Вильнюсе. AdsMe -ваше digital agency.
hernyHax · July 15, 2023 at 10:29 pm
На сайте https://xn—43-5cd0a1ac4b9ah5b.xn--p1ai/ закажите качественную мебель: гостиные, кровати, тумбы, комоды, мягкую мебель, офисную мебель и многое другое, что создано из качественных, высокотехнологичных и инновационных материалов. Они не потеряют своего вида длительное время. Ознакомиться с примерами работ получится на сайте. В магазине регулярно проходят акции, чтобы ваша покупка была экономически выгодной. Замер абсолютно бесплатно. В обязательном порядке составляется договор.
BitcVguyfinnagt · July 15, 2023 at 10:37 pm
This is the best site for [url=https://exchanger24.org/xchange_btc_to_skrl/]Bitcoin to Skrill[/url] exchange.
Jerrygeate · July 15, 2023 at 10:55 pm
https://intensedebate.com/people/junecrack06
Medical Visa Online Application · July 15, 2023 at 11:25 pm
Incredible points. Solid arguments. Keep up the amazing spirit.
StevenEromb · July 15, 2023 at 11:25 pm
cialis online store canadian pharmaceuticals online cialis 40 mg best price
AlbertSep · July 15, 2023 at 11:36 pm
номер объекта недвижимости
Seo_Nuh · July 16, 2023 at 12:39 am
seo продвижение спб https://seo-v-spb.ru/
website · July 16, 2023 at 1:11 am
If you’re seeking to expand outside of on the intyernet poker then sportsbooks operating in nevada are a logical move.
Also visit my web-site … website
AlbertSep · July 16, 2023 at 1:19 am
недвижимость квартир вторичка
polikases · July 16, 2023 at 1:39 am
Лизинг авто https://xn—6-7kcicxgbyxp1c.xn--p1ai/ это гибкая возможность купить автомобиль без значительных финансовых затрат. Срок лизинга и оплаты выбираете вы. Экономия на налогах, обслуживании автомобиля делают лизинг авто привлекательным способом приобретения автомобиля.
fuck girl · July 16, 2023 at 2:05 am
fuck girl
erekhhalry · July 16, 2023 at 2:05 am
Сайт https://doskazaymov.kz/ дает возможность каждому получить помощь с кредитами в Казахстане. Частные объявления от инвесторов – срочные займы, под залог авто, получить помощь с ипотекой и получить кредит без подтверждения дохода. Займ на карту всего в течение дня, без переплат и страховок.
Jeremypem · July 16, 2023 at 2:13 am
https://devpost.com/chavezherrera813
Jerrygeate · July 16, 2023 at 2:44 am
http://www.jejuluonto.com/bbs/board.php?bo_table=qna&page=280&sod=asc&sop=and&sst=wr_hit&wr_id=7965
insurance claims · July 16, 2023 at 2:48 am
Hello there, I found your website by the use of
Google whilst searching for a similar topic, your web site came
up, it looks great. I have bookmarked it in my google bookmarks.
Hi there, simply was alert to your weblog via Google, and found that
it’s truly informative. I’m going to be careful
for brussels. I will appreciate in case you proceed
this in future. A lot of other people will be benefited
from your writing. Cheers!
Feel free to visit my blog: insurance claims
kulovreuff · July 16, 2023 at 5:13 am
На сайте https://serialexpress.ru приобретите сериалы, мультфильмы в отличном качестве, а также теленовеллы. Есть как зарубежные, так и отечественные сериалы, документальные фильмы, которые произведут впечатление на каждого. Есть те сериалы, которые рекомендованы редакцией сайта. А потому посмотреть их необходимо каждому. Регулярно на сайте появляются новые фильмы, которые необходимо посмотреть и вам. В коллекции несколько тысяч сериалов, среди которых вы обязательно выберете тот, что нужно.
obshchestroy.ru · July 16, 2023 at 6:04 am
Its like you read my mind! You seem to understand so much approximately this, like you wrote the ebook in it or something. I feel that you simply could do with some p.c. to drive the message house a bit, however other than that, this is wonderful blog. An excellent read. I’ll definitely be back.
escort service Mira Bhayandar · July 16, 2023 at 6:29 am
I’m really inspired together with your writing talents as smartly as with the format on your weblog.
Is this a paid subject or did you modify it yourself?
Anyway keep up the excellent high quality writing, it’s uncommon to look a
nice blog like this one these days..
Joshuatirty · July 16, 2023 at 8:22 am
https://petrusharest.ru/
Jerrygeate · July 16, 2023 at 8:29 am
https://judahmdvne.isblog.net/agencia-de-publicidad-chile-cosas-que-debe-saber-antes-de-comprar-22123544
Jeremypem · July 16, 2023 at 8:32 am
https://sun25837.actoblog.com/8750168/los-principios-b%C3%A1sicos-de-agencia-de-publicidad-santiago
Jerrygeate · July 16, 2023 at 12:40 pm
https://rylanqxdio.estate-blog.com/7818709/la-mejor-parte-de-marketing-digital-para-pymes
Jeremypem · July 16, 2023 at 12:40 pm
https://magazine28394.develop-blog.com/2373142/la-regla-2-minuto-de-posicionamiento-web-seo-para-e-commerce
ozanoFug · July 16, 2023 at 12:47 pm
Таксі 571 https://571.com.ua/ у місті Київ пропонує скористатися послугами пересування містом на комфортних автомобілях. Швидка подача, понад 150 автомобілів у парку, бонуси. Ми працюємо понад 8 років – всі наші послуги доступні за ціною.
StevenEromb · July 16, 2023 at 12:56 pm
buy tadalafil safely canadian pharmaceuticals online cheapest cialis 5mg
CrackSofthit · July 16, 2023 at 1:21 pm
USB Disk Security 6.9.3.5 Crack Free Download 2023
spy_Nuh · July 16, 2023 at 2:38 pm
поиск gps жучков
DavidRon · July 16, 2023 at 2:41 pm
https://serialzet.net/901-y-poslednii-muzhchina-y36.html
Joshuatirty · July 16, 2023 at 3:01 pm
стейк хаус минск
JohnEthek · July 16, 2023 at 4:01 pm
Discover the incredible world of [url=https://velo1.pro/]Velo Nicotine Pouches[/url] and indulge in a wide variety of exciting flavors and experiences!
Johndup · July 16, 2023 at 4:02 pm
Experience the incredible world of [url=https://velo1.pro/velo-slim/]Velo Slim[/url] and indulge in our premium collection of flavors for the ultimate satisfaction!
Johndup · July 16, 2023 at 4:20 pm
Discover the unparalleled world of [url=https://velo1.pro/velo-slim/]LYFT-VELO[/url] and indulge in our premium collection of flavors for the ultimate experience!
rnyshKeync · July 16, 2023 at 4:23 pm
На сайте https://waltzprof.com/ закажите качественную, надежную продукцию, которую создают на заводе ООО ” Валцпроф”. Здесь вы сможете заказать стальной профиль в большом выборе. Конструкции необходимы для сборки противопожарных конструкций, лофт перегородок, каркасов дверей и многого другого. Ознакомиться с продукцией поближе можно, изучив сайт. Все конструкции производятся из качественных, надежных материалов и только с использованием уникальных, продвинутых технологий.
Johndup · July 16, 2023 at 4:35 pm
Experience the extraordinary world of [url=https://velo1.pro/velo-mini-nicotine-pouches/]Velo Mini Nicotine Pouches[/url] and indulge in our premium collection of flavors for the ultimate satisfaction!
Johndup · July 16, 2023 at 4:40 pm
Experience the exceptional world of [url=https://velo1.live/zyn-vs-velo/]Swedish Snus[/url] and indulge in our premium collection of flavors for the ultimate satisfaction!
StevenEromb · July 16, 2023 at 7:37 pm
tadalafil for improved sexual satisfaction canadian pharmaceuticals online cialis price
ershopaype · July 16, 2023 at 7:44 pm
Лизинг https://xn--2-etbldbpr.xn--p1ai/ преимущества и удобство данной формы приобретения как легковых так и грузовых автомобилей оценили многие. Удобный срок лизинга и оплаты, а также определить пробег, который соответствует вашим потребностям. Лизинг освобождает вас от забот о продаже автомобиля и позволяет обновлять автомобиль по мере необходимости.
WilliamAgomi · July 16, 2023 at 7:45 pm
https://skidcom.ru/
BrettGam · July 16, 2023 at 8:07 pm
https://forum.gipsyteam.ru/index.php?viewtopic=170587&st=60
카지노사이트 · July 16, 2023 at 9:07 pm
Hello I am so glad I found your site, I really found you by accident, while I was looking
on Aol for something else, Nonetheless I am here now and would just like
to say cheers for a tremendous post and a all round entertaining blog (I also love the theme/design), I don’t have time to
browse it all at the minute but I have bookmarked it and also
added in your RSS feeds, so when I have time I will be back
to read a great deal more, Please do keep up the awesome b.
WilliamAgomi · July 16, 2023 at 9:24 pm
кафе на пушкинской минск
irbesartan 150mg cheap · July 16, 2023 at 9:57 pm
cipro otc cipro 250 mg no prescription buy cipro
egireFonee · July 16, 2023 at 11:13 pm
На сайте https://ecolan37.ru/ приобретите детскую одежду, постельное белье, декоративные и обычные подушки, одеяла, наволочки, панно из гобелена, пододеяльники, пледы и многое другое. Здесь находятся подушки на самый взыскательный вкус и различной цветовой гаммы, что позволит выбрать решение с учетом предпочтений, требований. Изделия выполнены из качественных, надежных материалов, которые сохранят свой внешний вид на долгое время, а цветовая палитра не поблекнет. Вы сможете воспользоваться рассрочкой для бизнеса.
BrettGam · July 16, 2023 at 11:20 pm
https://blondie.ru/node/416379
dolgodef · July 16, 2023 at 11:25 pm
На сайті https://alisun.shop/ ви зможете купити насіння овочів. Широкий асортимент якісних сортів насіння та гібридів з усього світу, сертифіковане насіння, можливість купити оптом та цілодобово з доставкою це зручний спосіб заощадити.
Jerrygeate · July 16, 2023 at 11:42 pm
http://hawkee.com/profile/4219744/
BrettGam · July 16, 2023 at 11:44 pm
https://kriptovalyuta.com/forum/viewtopic.php?id=5130
BrettGam · July 17, 2023 at 12:22 am
https://hero.izmail-city.com/forum/read.php?5,12853
BrettGam · July 17, 2023 at 1:09 am
https://103news.com/astrahan/352587283/
BrettGam · July 17, 2023 at 1:33 am
https://forum.dneprcity.net/showthread.php?t=322776
BrettGam · July 17, 2023 at 2:04 am
http://www.diablomania.ru/forum/showthread.php?t=358670
일산출장안마 · July 17, 2023 at 2:45 am
After going over a number of the blog posts on your blog, I honestly like your
way of blogging. I added it to my bookmark website list and will be checking back
soon. Please visit my website as well and let me
know how you feel.
online casino · July 17, 2023 at 3:32 am
I’m impressed, I must say. Seldom do I encounter a blog that’s equally educative
and entertaining, and without a doubt, you have hit the nail on the head.
The issue is something not enough folks are speaking intelligently about.
I am very happy I found this during my hunt for something regarding this.
roninjodia · July 17, 2023 at 3:40 am
На сайте https://numerolog56.ru/ почитайте интересную, любопытную информацию, касающуюся нумерологии. Есть данные о болезнях, информация о варнах, планетах, карме, матрице и судьбе. И самое важное, что информация написана экспертами в этой области, а потому на нее точно можно положиться. Также регулярно публикуются свежие данные на эту тему. Для того чтобы найти нужную тему, просто воспользуйтесь поиском. Так вы сможете узнать то, о чем думает человек, как числа связаны с профессиями.
Jeremypem · July 17, 2023 at 4:28 am
http://jeffthroat2.jigsy.com/entries/general/La-elecci%C3%B3n-de-tu-agencia-SEO-Consejos-para-elegir-la-mejor-para-tu-empresa-online
Jerrygeate · July 17, 2023 at 4:35 am
https://etextpad.com/
meshccheag · July 17, 2023 at 4:53 am
Compass https://getcompass.ru/ это современный корпоративный мессенджер, который бизнес во всех сферах использует для удобства и структурирования общения внутри компаний. Навести порядок в общении очень просто – достаточно скачать Compass, который работает на всех устройствах, независимо от операционной системы. Ознакомьтесь с полной информацией об удобном способе общения внутри компании на сайте.
Darrenimaph · July 17, 2023 at 5:47 am
http://instukzia.com/
gama_emaic · July 17, 2023 at 7:05 am
Добрый день! Хотел бы поделиться своим опытом входа в Гама Казино. Это одно из лучших казино, в которых мне довелось играть. Очень простой и быстрый вход на сайт позволяет мгновенно погрузиться в атмосферу азарта. Что меня особенно впечатлило, так это разнообразие игр и слотов, которые предлагает Гама Казино. Вход Gama Casino проходит без проблем, а после регистрации я смог насладиться невероятными бонусами и акциями, которые помогли увеличить мои шансы на выигрыш. Если вы ищете качественное и надежное казино, смело выбирайте вход в Гама Казино – вы не пожалеете!
situs 4d gacor hari ini · July 17, 2023 at 7:21 am
It’s really a nice and helpful piece of info. I’m glad that you shared this
helpful info with us. Please keep us up to date like this.
Thanks for sharing.
StephenPhync · July 17, 2023 at 7:58 am
самые дешёвые криптовалюты
StephenPhync · July 17, 2023 at 8:22 am
перспективная криптовалюта
StephenPhync · July 17, 2023 at 8:23 am
какие новые криптовалюты
Kevinral · July 17, 2023 at 8:41 am
https://hvostiq.ru/poluchenie-deneg-bystro/
escort service Khatima · July 17, 2023 at 8:56 am
Thanks for any other informative blog. The place else may I am getting
that type of info written in such an ideal approach? I have a undertaking that I’m simply now working on, and I have been at the glance out for such information.
ashutGob · July 17, 2023 at 10:04 am
На сайте http://rudiploma.com/ вы сможете ознакомиться с каталогом дипломов различных высших образовательных заведений, а также получить ответы на все вопросы. Осуществляется доставка по всей России.
StevenEromb · July 17, 2023 at 10:04 am
tadalafil for enhanced performance Canadian Pharmacies Online cialis 20mg buy
Jeremypem · July 17, 2023 at 10:28 am
https://www.ted.com/profiles/44039058
Jerrygeate · July 17, 2023 at 10:57 am
https://diigo.com/0su3nn
seo_viess · July 17, 2023 at 11:14 am
seo продвижение калуга https://seo-v-kaluge.ru/
Charlescah · July 17, 2023 at 11:16 am
складчина
StevenEromb · July 17, 2023 at 12:11 pm
cialis dosage instructions canadian drugs without prescription cialis pills australia
Hyperbaric Oxygen เชียงใหม่ · July 17, 2023 at 2:01 pm
Hi to every one, the contents present at this website are truly amazing
for people knowledge, well, keep up the good work fellows.
StevenEromb · July 17, 2023 at 2:10 pm
cialis for sale online pharmacy review cialis 20 mg price
bochadat · July 17, 2023 at 2:49 pm
На сайте https://prokat-kreslo-kolyasok.ru воспользуйтесь такой услугой, как аренда инвалидных колясок. При этом не потребуется залог. Услуга оказывается по доступной стоимости. Вы сможете воспользоваться оперативной доставкой по Москве за 2 часа. Для этого необходимо лишь оставить заявку на сайте. К важным преимуществам компании относят то, что она поставляет только новое, исправное оборудование. В арсенале несколько десятков колясок. Перед вами большой выбор изделий. Ознакомьтесь с техническими характеристиками.
Robertdup · July 17, 2023 at 3:58 pm
Discover the exquisite world of [url=https://nicotine-pouches.store/]nicotine pouches store[/url] and indulge in our premium collection of flavors for the ultimate satisfaction!
Jeremypem · July 17, 2023 at 4:03 pm
https://squareblogs.net/houseclub4/seleccionando-la-agencia-seo-ideal-para-crecer-tu-negocio-en-linea
StevenEromb · July 17, 2023 at 4:21 pm
tadalafil with discreet shipping online canadian pharmacy with prescription cialis 5 mg for sale
Jerrygeate · July 17, 2023 at 4:48 pm
https://mcclure-white-2.technetbloggers.de/agencias-de-publicidad-en-santiago-chile-generando-impacto-en-el-mercado-local-e-internacional
seo_Nuh · July 17, 2023 at 6:00 pm
разработка и продвижение сайтов в туле https://seo-v-tule.ru/
rochkigaili · July 17, 2023 at 6:09 pm
На сайте https://moscowcruise.ru/ вы сможете заказать увлекательные, интересные и запоминающиеся прогулки на теплоходах по Москве. Можно организовать вкусный ужин на палубе и послушать изысканную живую музыку, побывать в самых интересных местах столицы и даже прогуляться по ночному городу, который вызовет у вас положительные и приятные эмоции. Во время прогулки обязательно сделайте красочные и яркие фотографии. Приобретите билеты прямо сейчас! Только сегодня специально для вас установлены доступные цены.
StevenEromb · July 17, 2023 at 6:56 pm
generic cialis for sale canadian pharmacy viagra generic cialis 20mg price in usa
remont-master-info.ru · July 17, 2023 at 7:52 pm
Hmm is anyone else having problems with the images on this blog loading? I’m trying to figure out if its a problem on my end or if it’s the blog. Any feed-back would be greatly appreciated.
Andrewboowl · July 17, 2023 at 7:57 pm
складчина
Jeremypem · July 17, 2023 at 8:51 pm
https://qualified-anemone-wnd9fv.mystrikingly.com/blog/sseok-cl-es-la-mejor-agencia-de-seo-en-chile
lezhkcap · July 17, 2023 at 9:25 pm
On the site https://aypower.pro/ you can purchase industrial generators that are always in stock. Own production, fully certified products, fast shipment, worldwide shipping, 24/7 support. Check out the catalog on the site.
Fabulous Adult Entertainment in Kolkata at Modest Rate from Shaumya · July 17, 2023 at 9:45 pm
Hello there! I know this is kinda off topic but I was wondering
if you knew where I could find a captcha plugin for
my comment form? I’m using the same blog platform as yours
and I’m having problems finding one? Thanks a lot!
Pekkadup · July 17, 2023 at 10:18 pm
Koe paras [url=https://killapods.eu/product-category/nicopods/pablo-snus/]Pablo Snus[/url] ja nikotiinipussit ainutlaatuisesta makuvalikoimastamme!
Jerrygeate · July 17, 2023 at 10:28 pm
https://lockhart-cowan.technetbloggers.de/agencia-seo-claves-para-elegir-la-mejor-y-potenciar-tu-negocio-en-linea
BitcVgutfinnagt · July 17, 2023 at 10:37 pm
Сдесь можно быстро и безопасно [url=https://skachat-minecraft.fun/]скачать Майнкрафт[/url].
Anastasia · July 17, 2023 at 10:37 pm
An interesting discussion is definitely worth comment. I think that you should publish more on this subject, it might not be a taboo subject but typically people don’t talk about such subjects. To the next! Many thanks!!
Here is my webpage … http://Www.aidt.org/__media__/js/netsoltrademark.php?d=Straightupsearch.com%2Fair-landline-review%2F
Edwarddup · July 17, 2023 at 10:47 pm
Step into the realm of [url=https://riosart.gallery/juhan-kangilaski/]Juhan Kangilaski[/url], whose captivating paintings reflect a fascinating blend of technique and emotion, compelling the observer to connect with the narratives deeply.
Arthurdup · July 17, 2023 at 10:50 pm
Experience the enthralling paintings of [url=https://riosart.gallery/paul-paede/]Paul Paede[/url], a pioneering artist whose innovative techniques and creative narratives have left an indelible mark on the world of modern art.
avto_emaic · July 17, 2023 at 11:24 pm
https://vinchecker.ru
StevenEromb · July 18, 2023 at 12:57 am
where to buy tadalafil canadian rx pharmacy online cialis for sale
vortsGrerb · July 18, 2023 at 2:11 am
Статьи МБК на сайте https://www.mbk.ru/blogs — это советы и кейсы про то, как взять или погасить кредит, продать недвижимость, выжить при кризисе, и просто повысить свою финансовую грамотность.
Jeremypem · July 18, 2023 at 2:27 am
https://postheaven.net/groundindex30/como-beneficiar-al-experiencia-de-una-agencia-de-publicidad
klyuyUnisk · July 18, 2023 at 3:08 am
На сайте https://arenda-invalidnoj-kolyaski.fast-rent.ru возьмите в прокат инвалидную коляску с оперативной доставкой до дома. Для этих целей рекомендуется заказать обратный звонок, после чего вы начнете пользоваться коляской уже в ближайшее время. Только в этой компании огромный выбор вариантов, а расценки от 100 рублей. Коляски чистые, ухоженные, в хорошем состоянии. Перед вами огромный выбор вариантов, среди которых вы подберете решение на свой вкус. Напротив каждой коляски имеются технические характеристики.
kraken onion · July 18, 2023 at 4:29 am
When some one searches for his vital thing, therefore he/she wishes to be
available that in detail, thus that thing is maintained over
here.
Oscarorine · July 18, 2023 at 7:42 am
https://www.wishlistr.com/soph75
StevenEromb · July 18, 2023 at 7:43 am
tadalafil 10mg online prescriptions canada without cialis 20 mg price
Oscarorine · July 18, 2023 at 9:13 am
https://xpoff.com/members/werfas.48195/
StevenEromb · July 18, 2023 at 9:46 am
tadalafil for improved libido online prescriptions canada without generic cialis pill
Jerrygeate · July 18, 2023 at 10:19 am
https://groundmole03.werite.net/post/2023/06/06/Agencia-de-Publicidad-en-Santiago-Chile:-%C2%BFC%C3%B3mo-pueden-impulsar-tu-negocio
Oscarorine · July 18, 2023 at 10:44 am
https://www.beamng.com/members/dewera.543394/
BitcVgdtfinnagt · July 18, 2023 at 10:45 am
Здесь можно быстро и удобно [url=https://skachat-minecraft.org/]скачать Майнкрафт[/url].
JamesVek · July 18, 2023 at 11:59 am
https://pedstrana1.ru/images/pages/?kupit-diplom-o-srednem-obrazovanii_11.html
PCdreamhit · July 18, 2023 at 12:35 pm
Bandicam Download Crack FREE 2023
HenrySak · July 18, 2023 at 1:08 pm
дизайны двухкомнатных квартир фото
StevenEromb · July 18, 2023 at 1:13 pm
tadalafil without insurance canadian pharmaceuticals online tadalafil 20 mg
JamesVek · July 18, 2023 at 1:34 pm
https://whatwood.ru/pag/kupit-diplom-o-srednem-obrazovanii.html
more info · July 18, 2023 at 1:48 pm
I will right away clutch your rss as I can not in finding your e-mail subscription link or newsletter service.
Do you’ve any? Kindly permit me recognize so that I may subscribe.
Thanks.
BitcVaatfinnagt · July 18, 2023 at 2:21 pm
Вы можете тут быстро [url=https://skachat-minecraft.space/]скачать Майнкрафт[/url].
HenrySak · July 18, 2023 at 2:36 pm
бесплатный дизайн проект квартиры
videopager.ru · July 18, 2023 at 2:48 pm
Видео приколы онлайн бесплатно [url=]https://www.videopager.ru[/url].
Новые приколы Потрачено. Мы регулярно выпускаем смешные видео и моменты, и фейлы. Лучшие приколы 2023 …
JamesVek · July 18, 2023 at 3:06 pm
http://school-47.ru/includes/pgs/?kupit-diplom-kolledzha_2.html
Jeremypem · July 18, 2023 at 3:24 pm
https://groundmole03.werite.net/post/2023/06/06/Agencia-de-Publicidad-en-Santiago-Chile:-%C2%BFC%C3%B3mo-pueden-impulsar-tu-negocio
StevenEromb · July 18, 2023 at 3:31 pm
tadalafil without prescription online medication pharmacy cialis original
Johnnystery · July 18, 2023 at 3:33 pm
ипотека на мужа
zapoy_Gox · July 18, 2023 at 4:36 pm
вывод из запоя на дому москва https://vyvod-iz-zapoya77.ru/
JamesVek · July 18, 2023 at 4:37 pm
https://strannik36.ru/includes/pgs/?diplom-vysshee-obrazovanie_11.html
Jerrygeate · July 18, 2023 at 4:43 pm
https://www.ted.com/profiles/44039058
azantpoiny · July 18, 2023 at 5:27 pm
На сайте https://skladnye-kreslo-kolyaski.ru возьмите в аренду инвалидные коляски. С вас не возьмут залог, а доставка конструкций происходит за пару часов. Прямо сейчас вы сможете оставить заявку на аренду изделия. Она обойдется вам недорого. К важным преимуществам обращения в компанию относят то, что все оборудование является качественным, надежным, комплекты обновляются ежемесячно. Большой выбор колясок на выбор – несколько десятков. Выбирайте то изделие, которое вам больше всего подходит.
JamesVek · July 18, 2023 at 6:06 pm
http://kenver.ru/fm/pgs/?kupit-diplom-kolledzha_7.html
Johnnystery · July 18, 2023 at 7:13 pm
как получить ипотеку в 2023
JamesVek · July 18, 2023 at 7:36 pm
https://el-linelogistic.ru/images/pages/?kupit-diplom-kolledzha_9.html
StevenEromb · July 18, 2023 at 7:36 pm
cialis benefits canadian drugs without prescription cialis 5 mg tablet price
Johnnystery · July 18, 2023 at 7:38 pm
как получить проценты по ипотеке
infokredit24.ru · July 18, 2023 at 7:56 pm
Оформление кредита в максимально короткие сроки [url=]https://www.infokredit24.ru[/url].
Быстро кредит можно оформить в том банке, где вы получаете зарплату. Тогда справка о доходах не потребуется и собрать документы будет гораздо проще. Либо, если у вас положительная кредитная история.
MLS live scores and updates · July 18, 2023 at 7:59 pm
Somebody necessarily help to make critically posts I would state.
That is the first time I frequented your website page and thus far?
I amazed with the analysis you made to make this particular publish amazing.
Wonderful job!
Johnnystery · July 18, 2023 at 8:15 pm
ли получить ипотеку
AI Generator Tools · July 18, 2023 at 8:26 pm
I really like your blog.. very nice colors & theme. Did you design this website yourself or did you
hire someone to do it for you? Plz respond as I’m looking to design my own blog and
would like to know where u got this from. thank you
Johnnystery · July 18, 2023 at 9:02 pm
онлайн займы под залог недвижимости
Johnnystery · July 18, 2023 at 9:26 pm
сколько можно получить вычет по процентам ипотеки
Johnnystery · July 18, 2023 at 9:58 pm
ипотека на вторичное жилье калькулятор
Johnnystery · July 18, 2023 at 10:14 pm
частный займ под залог недвижимости
zerovPaype · July 18, 2023 at 10:20 pm
На сайте https://dosug-ivanovo.com/ вы сможете найти девушку для романтической встречи, сексуальных утех и сладких объятий. Все дамы ухоженные, отличаются красивыми формами, эластичной и упругой кожей, красивой фигурой, которая сведет с ума любого мужчину. При этом вы можете воспользоваться различными дополнительными услугами и ощутить настоящий экстаз. Перед вами девушки самого разного возраста и комплекции. Для того чтобы подобрать нужный вариант, необходимо воспользоваться специальным фильтром.
Aaronerota · July 18, 2023 at 10:23 pm
http://offtop.ru/devchonki/view.php?t=2905622&part=&neworrep=1&
StevenEromb · July 18, 2023 at 10:32 pm
tadalafil dosage instructions prescriptions from canada without prescription cialis from canada
Jerrygeate · July 18, 2023 at 10:48 pm
https://www.openlearning.com/u/acostamcgrath-rvsnid/blog/CmoEscogerLaAgenciaSeoPerfectaParaTuNegocioDigital
hokhlvulky · July 18, 2023 at 11:29 pm
На сайте https://waltzprof.com/ вы сможете заказать высококачественный стальной профиль в огромном выборе. Он предназначается для комфортной, оперативной сборки преград, перегородок в стиле лофт, каркасов дверей и многого другого. Все конструкции производятся на высокоточном оборудовании, в любом объеме и только с применением инновационных технологий. С полным ассортиментом, который создается на производстве, ознакомьтесь на сайте. При необходимости воспользуйтесь помощью высококлассных менеджеров.
Aaronerota · July 18, 2023 at 11:44 pm
https://spshn.ru/plugins/forum/forum_viewtopic.php?295156.0#post_295156
BitcVbayfinnagt · July 18, 2023 at 11:45 pm
Тут вы всегда можете безопасно [url=https://skachat-minecraft.top/]скачать Майнкрафт[/url].
WilbertHet · July 19, 2023 at 12:06 am
договор аренды квартиры между физическими скачать
Aaronerota · July 19, 2023 at 1:03 am
http://lawcanal.ru/forum/viewtopic.php?f=25&t=5388
StevenEromb · July 19, 2023 at 1:28 am
tadalafil online pharmacy canadian rx pharmacy online cialis pills overnight
Aaronerota · July 19, 2023 at 2:24 am
http://nrkmania.ru/viewtopic.php?f=31&t=5775
etukhvexug · July 19, 2023 at 2:41 am
Боди женское с открытой спинкой https://www.wildberries.ru/brands/310737821-Splash%20SW комфортная модель из мягкой, дышащей, но упругой ткани “рубчик” (лапша) за счет добавления эластана, приятно прилегает к телу словно “вторая кожа”. Боди женское без рукавов, с американской проймой “Американка” и небольшим вырезом на спине, напоминающем форму капельки. Можно сочетать с любым образом в школу на 1 сентября или последний звонок подростка девочки: брюками клеш, юбкой миди и мини и даже шорты. Образ красотки на вечеринку или свидание вам обеспечен! Рекомендуем иметь несколько таких боди в разных цветах, удобно носить самостоятельно или в комплекте с оверсайз вещами, поддевая бодик как “вторую кожу”.
WilbertHet · July 19, 2023 at 3:22 am
аренда комнатной квартиры
Aaronerota · July 19, 2023 at 3:43 am
https://taxist.by/forum/index.php?showtopic=19784
WilbertHet · July 19, 2023 at 3:47 am
авито снять квартиру на длительный срок
Jerrygeate · July 19, 2023 at 4:00 am
https://community.windy.com/user/frogwoman90
drianRet · July 19, 2023 at 4:44 am
Аяхуаска блог: Аяваска, осознанные сновидения, магия Амазонии и другие нужные, полезные, интересные вещи. Путешествие в мир шаманизма и растений Силы, открывающих новые пути познания мира и саморазвития. Отзывы об аяуаске из первых рук, содержащие ценную информацию об этой древней практике. https://ayawaska-v-peru.com/ Увлекательный блог, где автор делится личным опытом ретритов с аяваской в Перу, изменивших ее жизнь.
Justintrave · July 19, 2023 at 4:58 am
аренда посредников на длительный срок квартиры
Aaronerota · July 19, 2023 at 5:01 am
https://www.freeboard.com.ua/forum/viewtopic.php?pid=940907#p940907
Aaronerota · July 19, 2023 at 6:17 am
https://airfull.ru/forum/viewtopic.php?f=9&t=4558
clinica_rhymn · July 19, 2023 at 6:27 am
лучшая наркологическая клиника https://narkologicheskaya-klinika77.ru/
Aaronerota · July 19, 2023 at 7:34 am
http://forum.bolen-kot.net.ru/index.php?showtopic=26072
erkuloDit · July 19, 2023 at 7:35 am
На сайте https://sex64.ru/ вы найдете симпатичную, красивую и сексуальную девушку, которая доставит вам райское наслаждение. У каждой дамы привлекательное, красивое тело, подтянутая кожа, а потому вы насладитесь ее формами. Женщины соблазнительные, привлекательные, подарят море наслаждения и романтики. Они сделают все необходимое для того, чтобы вы насладились процессом и остались довольны. Каждая девушка предлагает различные дополнительные услуги, которые помогут разжечь огонь страсти.
John#smith[Fopunekuvyfadipy,2,5] · July 19, 2023 at 7:41 am
Discover the best deals and discounts on [url=https://velo1.store/]Buy Snus Discount Code[/url] at Velo Store. Get exclusive offers on a wide range of snus flavors and enjoy your snus experience to the fullest!
John#doe[Zugyvarovinuwepo,2,5] · July 19, 2023 at 7:47 am
Discover the best deals and discounts on [url=https://velo1.store/order-snus-online-velo/]order snus online velo[/url] at Velo Store. Enjoy the rich flavors and premium quality of our snus collection at a 10% off!
Jerrygeate · July 19, 2023 at 7:53 am
http://www.heromachine.com/forums/users/footgirdle37/
driving for dollars · July 19, 2023 at 7:58 am
Hello there! Would you mind if I share your blog with my zynga group?
There’s a lot of folks that I think would really enjoy
your content. Please let me know. Cheers
문화상품권현금화 · July 19, 2023 at 8:13 am
Great site you have got here.. It’s hard to
find high quality writing like yours nowadays. I really appreciate people like you!
Take care!!
John#doe[Zugyvarovinuwepo,2,5] · July 19, 2023 at 8:14 am
Take advantage of our special offer and get 10% off on [url=https://velo1.store/velo-snus-buy-discount/]Velo Snus Buy[/url]. Use the coupon code at Killapods.EU to avail the discounted price. Enjoy the rich flavors and premium quality snus!
Justintrave · July 19, 2023 at 8:21 am
аренда квартиры на дону
Justintrave · July 19, 2023 at 8:46 am
авито снять квартиру
Aaronerota · July 19, 2023 at 8:52 am
http://www.bisound.com/forum/showthread.php?p=546994#post546994
Justintrave · July 19, 2023 at 9:28 am
квартира сдать на длительный срок без посредников
essaypro · July 19, 2023 at 9:44 am
I think the admin of this website is in fact working hard for his web page, for the
reason that here every data is quality based material.
syushabemo · July 19, 2023 at 9:52 am
На сайте https://online-tkm.com/ вы сможете узнать телефон, чтобы позвонить либо оформить заявку для того, чтобы получить лечение в Китае. Это государственная клиника, которая находится в Китае, а ее филиалы в Пекине, Даляне, на острове Хайнань. Профессоры составляют индивидуальный план терапии, чтобы она обязательно вам помогла и принесла необходимый эффект. Эта поликлиника является лицензированным учреждением, в котором идеально сочетается традиционная медицина, а также уникальные, проверенные методы лечения.
Aaronerota · July 19, 2023 at 10:11 am
http://skodarapidclub.ru/forum/showthread.php?p=1430639#post1430639
Justintrave · July 19, 2023 at 10:21 am
снять квартиру недорого
James#athletic[Quvozysuwebykuvuc,2,5] · July 19, 2023 at 10:29 am
Experience the thrill of VELO 4mg Nicotine Snus: Exciting Flavors, Robust Strength, Discreet Design. Explore our diverse range of options for an extraordinary [url=https://velo1.store/velo-snus-buy-discount/]Velo Snus Coupon[/url] journey!
James#athletic[Quvozysuwebykuvuc,2,5] · July 19, 2023 at 10:33 am
Experience the thrill of VELO 4mg Nicotine Snus: Exciting Flavors, Robust Strength, Discreet Design. Explore our diverse range of options for an extraordinary [url=https://velo1.live/velo-4mg/]VELO 4mg nico bags[/url] journey!
Jerrygeate · July 19, 2023 at 10:48 am
https://coub.com/pastascene34
call girl · July 19, 2023 at 10:52 am
I got this site from my buddy who told me regarding this web site and now this time
I am browsing this website and reading very informative posts at this time.
Aaronerota · July 19, 2023 at 11:29 am
http://uid.me/diplom_kupit#
школьники · July 19, 2023 at 11:33 am
[url=https://olimpiady-dlja-shkolnikov-onlajn.ru/]Олимпиады для школьников[/url]
Всероссийские олимпиады также состязания чтобы преподавателей, учащихся вузов, школьников равным образом дошкольников! Задачи с учетом ФГОС!
Олимпиады для школьников
Фланцевый · July 19, 2023 at 11:58 am
[url=https://sfz63.ru/]фланцевый завод[/url]
Завод расположен на 30 клм от Самары, на пересечении основополагающих автотранспортных магистралей. Общая эспланада производственной территории – 4,5 гектара, на которых размещены производственные цеха из нужной фабричной инфраструктурой.
фланцевый завод
Aaronerota · July 19, 2023 at 12:47 pm
https://www.evernote.com/shard/s454/sh/30ff0177-928e-8e70-1979-e7a1321f400e/P851pSkRfy0edWgxkxaphJe5VhDajXtFs_CrVqMzMYB_2ngOi1hox1DD6w
школьники · July 19, 2023 at 12:51 pm
[url=https://olimpiady-dlja-shkolnikov-onlajn.ru/]Олимпиады для школьников[/url]
Всероссийские олимпиады также состязания чтобы учителей, студентов, школьников и еще дошкольников! Урока с учетом ФГОС!
Олимпиады для школьников
fedotSed · July 19, 2023 at 1:26 pm
На сайте https://runobe.ru вы сможете почитать ранобэ в онлайн-режиме и абсолютно бесплатно. Романы переведены на русский язык, а потому вы сможете быстро сориентироваться в категории, тематике. Есть ранобэ на тему дружбы, любви и самых приятных чувств, а потому не составит труда подобрать вариант с учетом предпочтений. Регулярно выбор обновляется для того, чтобы вы смогли ознакомиться с лучшими произведениями. Вас приведут в восторг интересные и незаурядные картинки, которые сопровождают каждый роман.
Фланцевый · July 19, 2023 at 1:45 pm
[url=https://sfz63.ru/]фланцевый завод[/url]
Энергозавод размещен на 30 км через Самары, на пересечении стержневых транспортных магистралей. Общая площадь производственной земли – 4,5 гектара, на каковых расположены производственные цеха со нужной авиазаводской инфраструктурой.
фланцевый завод
financial freedom · July 19, 2023 at 3:48 pm
It’s actually a cool and helpful piece of information. I am satisfied that you
simply shared this useful info with us. Please stay us up to date like this.
Thank you for sharing.
rezhaalilt · July 19, 2023 at 5:14 pm
На сайте https://konsultant.by/where-to-go/popular/programmer/ узнайте о том, куда поступить после 11 класса в Беларуси, чтобы стать программистом. В этом году каждый ученик сможет поступить в колледжи, а также университеты, где удастся получить высшее образование. Для того чтобы поступить в университет Беларуси, необходимо иметь сертификат централизованного тестирования по таким предметам, как физика, математика, белорусский либо русский. Чуть ниже находятся те ВУЗы, в которых вы сможете получить высшее образование платно либо на бюджетной основе.
Jerrygeate · July 19, 2023 at 5:32 pm
https://www.metooo.io/u/63265bdbba88547441a795c0
StevenEromb · July 19, 2023 at 6:07 pm
tadalafil for sale online canadian mail order pharmacy cialis 20 mg price in usa
Victorhut · July 19, 2023 at 6:32 pm
https://bereg.webtalk.ru/viewtopic.php?id=8584#p27379
yomba.ru · July 19, 2023 at 6:34 pm
Секреты женской красоты или как стать совершенной [url=]https://www.yomba.ru/[/url].
Здоровое питание – путь к красоте.
Maximusempixelm · July 19, 2023 at 6:36 pm
abbassare la pressione sanguigna
haritonseete · July 19, 2023 at 6:37 pm
На сайте https://adler.calypso.ooo/ вы сможете арендовать любую яхту либо катер, парусник от популярной компании «Калипсо». Все они в хорошем состоянии, полностью исправные. Во время отдыха на них можно загорать, устроить рыбалку, насладиться пейзажами, поплавать и даже устроить роскошную вечеринку. Забронировать морское судно можно через специальную форму. Теперь и вы сможете устроить незабываемое путешествие и насладиться всем функционалом яхты. Если остались вопросы, то задайте их по обозначенному телефону.
crypto_jef · July 19, 2023 at 7:06 pm
https://cryptopumpnews.com/free-pump-crypto-trading-signals/
orotkneina · July 19, 2023 at 7:18 pm
На сайте http://misokmv.ru/ вы сможете узнать всю необходимую информацию о «Международном институте современного образования». В список основных услуг входят: повышение квалификации, переподготовка специалистов, обучение, а также профессиональное образование. В этом учебном заведении вы получите качественное образование, а все учителя – высококлассные специалисты, которые подают информацию в простой, понятной, лаконичной форме. Уроки проходят в заочной, очной форме. Занятия проходят по индивидуальному плану.
앱코 초경량 게이밍 헤드셋 · July 19, 2023 at 7:22 pm
Thanks , I’ve recently been searching for info about this subject for a
while and yours is the best I’ve found out till now. But,
what in regards to the bottom line? Are you sure about the
supply?
Victorhut · July 19, 2023 at 7:49 pm
https://komfort.rusff.me/viewtopic.php?id=9266#p31065
Drieno · July 19, 2023 at 8:16 pm
essay help cheap help with writing essays social servics to help immigrants essay
z-lib.is · July 19, 2023 at 8:17 pm
Hey terrific blog! Does running a blog such as this require a great
deal of work? I’ve absolutely no knowledge of computer programming however I had been hoping to start
my own blog in the near future. Anyhow, should you have any suggestions or tips for new blog owners please share.
I understand this is off topic but I just needed to ask.
Thanks a lot!
Victorhut · July 19, 2023 at 9:07 pm
https://xango.1bb.ru/viewtopic.php?id=182#p182
Victorhut · July 19, 2023 at 10:24 pm
https://spkbplace.ru/blogs/interest/uskorte-svoyu-kareru-kupit-diplom-ot-professionalov.php
StevenEromb · July 19, 2023 at 10:49 pm
best place to buy tadalafil online medicine to buy tadalafil 5mg price in india
BitcVaodfinnagt · July 19, 2023 at 10:54 pm
Very trust site to exchange [url=https://exchanger24.org/xchange_btc_to_ppusd/]BTC to PayPal[/url].
serial_viess · July 19, 2023 at 11:32 pm
Смотреть сериалы онлайн – это отличный способ окунуться в захватывающие сюжеты и погрузиться в удивительные миры. Благодаря возможности просматривать любимые сериалы на любом устройстве в любое удобное время, мы можем наслаждаться захватывающими историями, не выходя из дома. Онлайн-платформа https://seasonvar.icu/ предлагает огромный выбор жанров и сериалов, позволяя каждому найти что-то по своему вкусу. Не нужно ждать выхода новой серии на телевидении, когда можно сразу запустить следующую эпизод в онлайн-режиме. Исследуйте новые миры, переживайте эмоции героев и наслаждайтесь увлекательными сюжетами, смотря сериалы онлайн!
avlovblilt · July 19, 2023 at 11:32 pm
На сайте https://sulyaev.ru/ вы сможете записаться на консультацию психолога в Екатеринбурге. Прием ведет Андрей Суляев, который является психоаналитиком, поможет справиться со сложными вопросами, лучше понять себя, справиться с теми психологическими проблемами, которые появились давно. Работа со взрослыми и в индивидуальной форме. Также на сайте имеются и различные информативные статьи, которые помогут решить проблему самостоятельно. Они представлены на самую разную тематику. Регулярно появляются новые материалы, с которыми захочется ознакомиться и вам.
Victorhut · July 19, 2023 at 11:39 pm
http://www.pajarojaguar.org/mediawiki01/index.php/Рзмените_СЃРІРѕСЋ_жизнь_сегодня:_Купить_диплом_Рё_достичь_новых_вершин
Jeremypem · July 20, 2023 at 12:43 am
http://www.xn--910b00ao6d16g68v87eeyp.kr/bbs/board.php?bo_table=food&wr_id=8418
снять офис в пригороде минска · July 20, 2023 at 12:44 am
My spouse and I stumbled over here coming from a different page and thought I may as well check things out. I like what I see so now i am following you. Look forward to checking out your web page again.
Jerrygeate · July 20, 2023 at 12:46 am
http://doorofhope.net.au/bbs/board.php?bo_table=free&wr_id=78277
Victorhut · July 20, 2023 at 12:54 am
http://luch-kino.by/users/440
JlZmdFyv · July 20, 2023 at 1:22 am
levitra generique hospitalier I think if I don t get my period after 7 to 10 days I will make an appt with another doctor
Victorhut · July 20, 2023 at 2:04 am
https://chillspot.co.za/read-blog/5701
Victorhut · July 20, 2023 at 3:13 am
http://92years.f-rpg.me/viewtopic.php?id=235#p259
Dedicated Server · July 20, 2023 at 3:15 am
I absolutely love your blog and find the majority of
your post’s to be exactly I’m looking for. can you offer guest writers to write content for you?
I wouldn’t mind creating a post or elaborating on a number
of the subjects you write about here. Again, awesome
blog!
Victorhut · July 20, 2023 at 4:23 am
http://ciphertalks.com/viewtopic.php?f=14&t=1108460
delhi call girls · July 20, 2023 at 5:13 am
I’m really enjoying the design and layout of your site. It’s a very easy on the eyes which makes it
much more pleasant for me to come here and visit more often. Did you hire out
a designer to create your theme? Excellent work!
JamesfuG · July 20, 2023 at 5:22 am
Change up your vaping routine with our [url=https://killapods.eu/product-tag/killa-switch/]Killa Switch[/url] vape products!
Victorhut · July 20, 2023 at 5:34 am
http://forum.hi-def.ru/index.php?showtopic=12507
nosovkep · July 20, 2023 at 5:45 am
На сайте https://play.google.com/store/apps/details?id=com.Matches.Category вы сможете сделать ставки на футбол в любое время. Это ваша возможность заработать побольше денег при благоприятном исходе событий. Важным моментом является то, что приложение максимально адаптировано под запросы клиента, а потому здесь понятный, простой интерфейс, с которым вы быстро разберетесь. Совершайте ставки, где бы вы не находились: на работе, в машине или в поездке. И получайте от этого больше приятных эмоций.
Edwarddup · July 20, 2023 at 5:50 am
Discover the mesmerizing creations of [url=https://riosart.gallery/juhan-kangilaski/]Juhan Kangilaski[/url]. His paintings, a blend of traditional aesthetics and contemporary themes, offer a unique narrative that resonates deeply with art enthusiasts.
bsbotnetzdxficaz7uffowuclqr2unjvxufj7g7uqq72xzpl4cbvr6ad.onion · July 20, 2023 at 6:14 am
Hi! I could have sworn I’ve visited this website before but after looking
at a few of the articles I realized it’s new to me.
Nonetheless, I’m definitely pleased I discovered it and I’ll be bookmarking it and checking back frequently!
avdeelorgo · July 20, 2023 at 6:35 am
На сайте https://ateleshtor.ru/ воспользуйтесь услугами ателье штор. Компания занимается пошивом, а также реализацией штор, выполняет текстильный дизайн. У нее огромный опыт в этом направлении, работает штат профессионалов, которые окажут все услуги на профессиональном уровне. Перед вами огромный ассортимент продукции, которая поможет вам создать уют. В салоне вы закажете те шторы, которые вам больше всего понравились. Ознакомьтесь со всеми категориями продукции, чтобы подыскать оптимальное решение.
Victorhut · July 20, 2023 at 6:46 am
http://militarymuster.ca/forum/showthread.php?tid=340037
Jerrygeate · July 20, 2023 at 7:09 am
https://www.rssing.com/request.php?req=furl&i=27252750&r=19&url=https://translate.google.fr/translate%3Fu=http://sada-color.maki3.net/bbs/bbs.cgi%3Fpage=0&ar=27&details=0303
Jeremypem · July 20, 2023 at 7:20 am
https://www.villi-aure.fi/?attachment_id=44
nadiyboift · July 20, 2023 at 7:37 am
https://viam.online/ это доска бесплатных объявлений для продажи товаров и услуг. Вы сможете разместить и свой магазин. Бесплатная подача и быстрая регистрация на доске объявлений позволят вам получить быструю продажу или выгодную покупку по всей России. Большой выбор категорий для размещения это удобный способ продать товар или услугу.
Nathanalero · July 20, 2023 at 7:57 am
https://mediawiki.governancaegestao.wiki.br/index.php/Reviving_The_Hidden_Treasure:_Basement_Remodeling
Victorhut · July 20, 2023 at 7:59 am
http://sev-school24.maxbb.ru/viewtopic.php?f=3&t=49
WilliamSeego · July 20, 2023 at 8:26 am
Гостиница Лермонтовский проспект
Nathanalero · July 20, 2023 at 8:35 am
https://imatri.net/wiki/index.php/Reviving_The_Hidden_Treasure:_Basement_Remodeling
Nathanalero · July 20, 2023 at 8:36 am
https://www.saltf4.net/w/index.php/User:JacklynMarmon
Hectorcem · July 20, 2023 at 8:57 am
караоке Щелковская
WilliamSeego · July 20, 2023 at 9:45 am
Гостиница у метро Марксистская
Nathanalero · July 20, 2023 at 9:59 am
https://sooriyabooks.lk/product/delving-deep-into-home-improvement-your-guide-to-hiring-basement-contractors/
JamesLeask · July 20, 2023 at 10:03 am
https://www.rutss.com/domain/lyft1.site
StevenEromb · July 20, 2023 at 10:32 am
tadalafil for sale prescription prices canadian meds cialis 20mg price in usa
espalagica · July 20, 2023 at 10:59 am
На сайте https://arendayachtsochi.com/blog/vierf-interboat/ вы получите всю необходимую информацию о Interboat. Это верфь, которая работает в Нидерландах. Она в течение длительного времени производит комфортные лодки высокого качества и созданные с применением уникальных и высококлассных технологий. За счет применения современных материалов лодки прослужат долгое время. В линейке 3 бренда, а также 18 вариантов лодок. В каждой лодке предусмотрен мощный двигатель. Каждое изделие наделено долгим сроком службы.
ozdnyrUith · July 20, 2023 at 11:03 am
На сайте https://clck.ru/34so7Y вы сможете заказать трансформаторные подстанции, силовые трансформаторы, КСО, ЩО. Компания «Пенза Энерго Сервис» реализует продукцию по привлекательной цене и с оперативной доставкой. А самое главное, что вся продукция качественная, сертифицированная и соответствует всем требованиям безопасности, создана по ГОСТу. Предлагается гарантийное обслуживание. Оплата любым, наиболее комфортным способом. Доставка трансформаторов выполняется автомобильным, водным либо железнодорожным способом.
JamesLeask · July 20, 2023 at 11:03 am
https://seochecks.co.uk/domain/xtrime.bio/P6KG64b87376431bc
DavidDrise · July 20, 2023 at 11:05 am
гостиница недалеко от Москвы
BitcVmnnfinnagt · July 20, 2023 at 11:31 am
Very good and trust site to [url=https://exchanger24.org/xchange_eth_to_ppusd/]ETH to PayPal[/url] exchange.
DavidDrise · July 20, 2023 at 11:40 am
отель Троицкая улица
DavidDrise · July 20, 2023 at 11:41 am
гостиница на час медведково
JamesLeask · July 20, 2023 at 12:01 pm
https://seocheck.es/domain/nordic-spirit.fun
Darrin · July 20, 2023 at 12:27 pm
Great info. Thanks a lot.
StevenEromb · July 20, 2023 at 12:29 pm
tadalafil 20 mg Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 20, 2023 at 1:00 pm
https://valordosite.com.br/domain/niikotinipussit.info
yabudumama.ru · July 20, 2023 at 1:53 pm
Я буду мама: все о беременности и родах [url=]https://www.yabudumama.ru/[/url]. Планирование беременности.
JamesLeask · July 20, 2023 at 1:56 pm
https://checkseo.minnionstech.in/domain/elf-bar1.life
Jerrygeate · July 20, 2023 at 2:06 pm
https://azurel.com/2021/02/07/comment-preparer-la-surface/
스웨디시 추천 · July 20, 2023 at 2:34 pm
There’s far more selection with regards to length of treatments and facials too!
Also visit mmy webb site 스웨디시 추천
Jeremypem · July 20, 2023 at 2:40 pm
https://www.sex8.zone/home.php?mod=space&uid=8255454&do=profile
StevenEromb · July 20, 2023 at 2:43 pm
tadalafil 10 mg Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 20, 2023 at 2:54 pm
https://www.bombstat.com/domain/pablo.wiki
borodcrarf · July 20, 2023 at 3:29 pm
На сайте https://lilibum.ru вы сможете познакомиться с человеком, который вам близок по духу, найдете свою вторую половинку. Вы назначите свидание после общения в чате, сможете пофлиртовать, завести новые знакомства, серьезные отношения и даже создать семью. Но, возможно, вы захотите познакомиться и просто для создания крепкой пары, любви. Здесь есть кандидаты различного возраста. Все они жаждут общения с вами. Обменивайтесь фотографиями и назначайте свидания. Для того чтобы воспользоваться всеми функциями, необходимо зарегистрироваться.
vavada_Nuh · July 20, 2023 at 3:43 pm
vavada casino официальный сайт
JamesLeask · July 20, 2023 at 3:50 pm
https://seoreport.steveshaw.me/domain/elf-bar1.xyz
ryuchWiz · July 20, 2023 at 4:32 pm
На сайте https://ack-group.ru вы сможете заказать профессиональную консультацию высококлассного психолога. Сейчас для всех клиентов действует выгодная акция: 2 первые консультации проведут за 2600 рублей, а семейные – за 3000 рублей. Специалист поможет вам решить любые сложности, которые появляются в общении с другими. Вы избавитесь от комплексов, которые мучают вас. Уже после первой консультации вы почувствуете значительное облегчение, снова начнете радоваться жизни. Психологи помогут вам повлиять на судьбу.
JamesLeask · July 20, 2023 at 4:46 pm
https://sitesearch.net/domain/disposable-vape.gay
JamesLeask · July 20, 2023 at 5:43 pm
https://www.siteoutlook.com/domain/snus1.art
StevenEromb · July 20, 2023 at 5:43 pm
tadalafil online Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JustinGog · July 20, 2023 at 5:57 pm
https://teletype.in/@kenneth1960/eL3ei5CDGRk
Jurist · July 20, 2023 at 6:28 pm
I am truly pleased to read this blog posts which consists of plenty of helpful data, thanks for providing these information.
ScottCip · July 20, 2023 at 6:31 pm
https://neva-salut.com/products/category/cvetnoj-dym-faery
JamesLeask · July 20, 2023 at 6:41 pm
https://seo.zioncentre.com/domain/nikotiinipussi1.xyz
JustinGog · July 20, 2023 at 7:13 pm
https://teletype.in/@egorov64/lEhd1bWMXU8
RolandoKig · July 20, 2023 at 7:14 pm
зайечицка горька
StevenEromb · July 20, 2023 at 7:35 pm
tadalafil Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 20, 2023 at 7:38 pm
https://www.bombstat.com/domain/niikotinipussit.bio
borodcok · July 20, 2023 at 7:59 pm
На сайте https://berg-compreccor.com/ вы сможете приобрести компрессорное оборудование COMPRESSOR BERG. Оно является лидером в этом сегменте, причем не только в России, но и мире. Отличается надежностью, практичностью, безупречным качеством, долгим эксплуатационным сроком. Оборудование обойдется недорого. Ассортимент отвечает самым высоким требованиям, оборудование используется в области энергетики, судостроительном производстве, химической промышленности. Его подбирают в зависимости от специфики деятельности клиента.
JustinGog · July 20, 2023 at 8:28 pm
https://teletype.in/@hallsarah1973/jVGojmyM7on
JamesLeask · July 20, 2023 at 8:34 pm
https://www.webdesignplusseo.com/freeseoaudittools/domain/xtrime.xyz
vavadajfhidjj · July 20, 2023 at 8:42 pm
[url=https://vavadajfhidjj.dp.ua/]https://vavadajfhidjj.dp.ua[/url]
Приняв на вооружение Vavada толпа рабочее зеркало теперь ваша милость приобретаете возможность кинуть запреты контролирующих органов. Точная копия игрового портала дозволяет …
https://vavadajfhidjj.dp.ua
vavadajfhidjk · July 20, 2023 at 9:08 pm
[url=https://vavadajfhidjk.dp.ua/]https://vavadajfhidjk.dp.ua[/url]
Vavada рабочее челкогляделка на сегодня, вход сверху церемонный сайт (а) также регистрация. Бездепозитные скидки Вавада казино.
https://vavadajfhidjk.dp.ua
BobbyMuh · July 20, 2023 at 9:12 pm
seosprint
bykovEveft · July 20, 2023 at 9:19 pm
На сайте https://dosash.ru вы сможете узнать всю исчерпывающую информацию, которая касается развития бизнеса в интернете. К примеру, есть информативные статьи на тему того, как подобрать тему для ведения блога, какие их них пользуются особой популярностью. Имеются материалы о СЕО-оптимизации и ее стратегии, Кроме того, узнаете о самых продвинутых и популярных трендах в сфере SEO. Представлены данные об инвестициях в образование. Здесь вы найдете все, что необходимо для повышения уровня знаний.
JamesLeask · July 20, 2023 at 9:30 pm
https://websiteurl.org/domain/nikotiinipussi.club/xC7A64b7e59e2e328
JustinGog · July 20, 2023 at 9:41 pm
https://teletype.in/@williamskevin02/q8zBtyj8vpP
vavadajfhidjj · July 20, 2023 at 9:56 pm
[url=https://vavadajfhidjj.dp.ua/]https://vavadajfhidjj.dp.ua[/url]
Приняв на вооружение Vavada казино пролетарое челкогляделка сегодня вы приобретаете возможность кинуть запреты наблюдательных органов. Буквальная фотокопия игрового портала позволяет …
https://vavadajfhidjj.dp.ua
BobbyMuh · July 20, 2023 at 10:19 pm
сеоспринт
JamesLeask · July 20, 2023 at 10:26 pm
https://www.seoauditreporter.com/domain/lyft1.xyz
JustinGog · July 20, 2023 at 10:53 pm
https://teletype.in/@valerijsmirnov2004/fQr13G6XIcD
JamesLeask · July 20, 2023 at 11:23 pm
https://seo.onlinepro.gr/domain/snus1.org
vavadajfhidjk · July 20, 2023 at 11:27 pm
[url=https://vavadajfhidjk.dp.ua/]https://vavadajfhidjk.dp.ua[/url]
Vavada рабочее челкогляделка на сегодня, вход на церемонный сайт (а) также регистрация. Бездепозитные бонусы Вавада казино.
https://vavadajfhidjk.dp.ua
ruzhiAffit · July 20, 2023 at 11:33 pm
На сайте https://lazonex.ru/ воспользуйтесь такой нужной услугой, как доставка грузов. Логистическая компания отличается огромным опытом поставки товаров самых разных ценовых категорий. Доставка происходит по морю, поездом, на автомобиле. Также предоставляется и такая услуга, как экспедирование грузоперевозок. Взаимодействие с заказчиками на всей территории России, а также СНГ. Осуществляется контроль на каждом этапе доставки. Профессиональные менеджеры сделают все именно так, как необходимо.
StevenEromb · July 20, 2023 at 11:49 pm
Doxycycline price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JustinGog · July 21, 2023 at 12:06 am
https://teletype.in/@maksimov82/vXcJOrxWqiW
JamesLeask · July 21, 2023 at 12:20 am
https://checkseo.minnionstech.in/domain/nordic-spirit.shop
fanasnal · July 21, 2023 at 12:28 am
На сайте https://proecodom.ru/bytovki/zhilaya/zimnyaya/ вы сможете заказать строительство зимних бытовок, пригодных для постоянного проживания. Все работы выполняются строго под ключ. Бытовки создаются из качественных, современных материалов, которые невосприимчивы к негативным воздействиям внешней среды. Они обрабатываются специальным огнеупорным составом, который дополнительно увеличивает эксплуатационные свойства. Все варианты утепленные, а потому находиться в них будет очень комфортно.
Jerrygeate · July 21, 2023 at 12:36 am
http://www.robotsystem.net/bbs/board.php?bo_table=free&page=23490&wr_id=148684
Jeremypem · July 21, 2023 at 12:47 am
https://pastelink.net/u2knlwkb
BitcVmdnfinnagt · July 21, 2023 at 12:54 am
Всем рекомендую один из лучших [url=https://exchanger24.org/xchange_btc_to_sberrub/]обменник Биткоин[/url] в России.
JamesLeask · July 21, 2023 at 1:15 am
https://seo.egbilisim.com.tr/domain/pablo-snus.gay
JustinGog · July 21, 2023 at 1:18 am
https://teletype.in/@younglisa2000/IZU9mq7MqBQ
StevenEromb · July 21, 2023 at 1:36 am
Doxycycline Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
poolfolie achtform · July 21, 2023 at 1:37 am
Hi would you mind stating which blog platform you’re using?
I’m looking to start my own blog in the near future
but I’m having a tough time deciding between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design seems different then most blogs and I’m looking for something completely unique.
P.S Sorry for getting off-topic but I had to ask!
추가 도움말 · July 21, 2023 at 1:51 am
Hmm it looks like your website ate my first comment (it
was super long) so I guess I’ll just sum it up what I had written and say, I’m thoroughly enjoying your blog.
I too am an aspiring blog blogger but I’m
still new to everything. Do you have any tips and hints
for beginner blog writers? I’d certainly appreciate it.
JamesLeask · July 21, 2023 at 2:10 am
https://www.websitereviewer.info/domain/pablo.fun
Õigusabi · July 21, 2023 at 2:16 am
My brother suggested I might like this blog. He was totally right. This post actually made my day. You cann’t imagine just how much time I had spent for this information! Thanks!
xoilac tv 17 · July 21, 2023 at 2:26 am
This design is steller! You definitely know how to keep a reader
entertained. Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!) Great job.
I really loved what you had to say, and more than that, how you presented it.
Too cool!
JustinGog · July 21, 2023 at 2:35 am
https://teletype.in/@aleksandrasidorov2004/jWE7Lgcbs-v
JamesLeask · July 21, 2023 at 3:08 am
https://www.seocheck.one/domain/pablo1.pro
alkinRer · July 21, 2023 at 3:12 am
На сайте https://m-strop.by/ вы сможете приобрести стропы грузовые, канатные, текстильные, различные приспособления. Предприятие гордится тем, что само создает свою продукцию, а потому проверяет ее качество на каждом этапе производства. Вся продукция находится на складе, что позволяет произвести отгрузку товаров в минимальные сроки. При этом заказчик получит их в необходимом объеме и в ограниченный промежуток времени. Каждый оптовый покупатель сможет рассчитывать на более выгодные и лояльные условия.
onstaRok · July 21, 2023 at 3:21 am
Логистическая компания Exim Trans https://exim-trans.kz/ это многолетний опыт работы в транспортно-экспедиционных перевозках. Мы осуществляем: автоперевозки, авиаперевозки, железнодорожные перевозки, таможенное оформление, мультимодальные перевозки, складские услуги. Наш опыт и профессионализм – это символ надежности и стабильности.
1win_rhymn · July 21, 2023 at 3:43 am
https://zlata-ribka.ru
JustinGog · July 21, 2023 at 3:52 am
https://teletype.in/@collinshelen04/lX5pmyN39wK
JamesLeask · July 21, 2023 at 4:06 am
https://analyzeseo.net/domain/blck1.xyz
Anthonydeego · July 21, 2023 at 4:59 am
https://soapidea.ru/nastennye-kotly-baxi-eco-4s
JamesLeask · July 21, 2023 at 5:03 am
https://www.seokra.com/domain/zyn1.wiki
Randythutt · July 21, 2023 at 5:49 am
лечение суставов
JamesLeask · July 21, 2023 at 5:59 am
https://www.seodio.com/domain/lyft1.gay
JamesLeask · July 21, 2023 at 6:56 am
https://seoprofitmaximiser.com/website-reviewer/domain/snusexpress365.bar
Heinzdup · July 21, 2023 at 6:58 am
Erleben Sie das ultimative [url=https://killapods.eu/de/product/pablo-ice-cold-xxl/]Pablo XXL[/url] Erlebnis mit unserer erstklassigen Auswahl an Geschmacksrichtungen!
Randythutt · July 21, 2023 at 7:09 am
восстановление водно солевого баланса
roslaFiz · July 21, 2023 at 7:43 am
По ссылке https://play.google.com/store/apps/details?id=com.Matches.Category сделайте ставки на футбольные состязания. Если вы выиграете, то сможете получить хорошую сумму денег и потратить ее на то, что хочется. При этом сотрудничество максимально прозрачное, честное, а потому деньги будут выплачены в строго отведенные сроки. Если удача будет на вашей стороне, то вы сможете получить больше денег. Делайте свои ставки и выигрывайте огромные суммы. Простой интерфейс, а потому с функционалом разберется даже новичок.
tents_Nuh · July 21, 2023 at 7:45 am
Tourist tent expert review https://tents-guide.com
terekhwef · July 21, 2023 at 7:48 am
На сайте https://promalplab.ru/ вы сможете ознакомиться с компанией Лаборатория промышленного альпинизма, которая специализируется на проведении высотных работ более 10 лет. К вашим услугам: монтажные работы, монтаж рекламы, подъем грузов, промышленный альпинизм, фасадные работы, спил деревьев и многое другое. Организация находится в Москве и работает круглосуточно
JamesLeask · July 21, 2023 at 7:54 am
https://www.mywebanalyser.com/domain/skruf.info
Jeremypem · July 21, 2023 at 8:12 am
https://repo.getmonero.org/frosttheory55
Robertbet · July 21, 2023 at 8:20 am
http://beterhbo.ning.com/profile/MilaEryomina?xg_source=activity
JamesLeask · July 21, 2023 at 8:53 am
https://seo-tools.dreamwebsters.com/domain/nikotiinipussi.art
StevenEromb · July 21, 2023 at 9:10 am
Doxycycline from india Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
andreybem · July 21, 2023 at 9:16 am
На сайте ритуальной службы Киева https://graale.net/ua вы сможете ознакомиться с большим комплексом ритуальных услуг. Похоронный дом ГРААЛЬ предлагает давно занимается услугами погребения и оказывает качественные услуги по организации похорон или организации кремации, а также уход за могилами. Ритуальная служба поможет вам в трудную минуту и возьмет на себя все вопросы организации похорон.
JamesLeask · July 21, 2023 at 9:50 am
https://seoboostlab.com/domain/disposable-vape.gay
JamesLeask · July 21, 2023 at 10:47 am
https://www.inventive9.com/seo-audit/domain/lyft1.xyz
JamesLeask · July 21, 2023 at 11:44 am
https://audit.aaravinfotech.com/domain/lyft1.art
tantinquomb · July 21, 2023 at 11:45 am
На сайте https://play.google.com/store/apps/details?id=com.pa.aurum вы сможете получить всю необходимую информацию о казино «Аурум», которое начало свою работу в 2020 году. Оно имеет лицензию. Играть на деньги получится только после того, как вы пройдете регистрацию и создадите свой аккаунт. На портале имеются игры исключительно от официальных поставщиков, которые дорожат качеством оказываемых услуг. Каждый новый игрок получает возможность воспользоваться 50 бесплатными вращениями. На депозит вам положат 150 фриспинов.
خريد لايك و ويو اينستاگرام · July 21, 2023 at 12:00 pm
Fabulous, what a blog it is! This web site gives valuable information to us, keep it
up.
BitcVbdnfinnagt · July 21, 2023 at 12:01 pm
Тут можно быстро и легально [url=https://skachat-minecraft.com.ua/]скачать Майнкрафт[/url] в России.
vipoutcallmassagelondon.net · July 21, 2023 at 12:13 pm
If you wish for to increase your knowledge only keep
visiting this website and be updated with the most up-to-date gossip posted here.
Also visit my webpage: vipoutcallmassagelondon.net
JamesLeask · July 21, 2023 at 12:40 pm
https://www.seokra.com/domain/disposable-vapes.wiki
JamesLeask · July 21, 2023 at 1:37 pm
https://www.purplepier.com.br/analisador-de-site/domain/pablo-snus.wiki
imdur 20 mg without prescription · July 21, 2023 at 2:03 pm
buy cymbalta how to purchase cymbalta 60 mg cymbalta otc
fominpam · July 21, 2023 at 2:04 pm
На сайте https://aptekamos.ru/ вы подберете и закажете любые лекарственные препараты, которые можно отыскать в ближайших аптеках Краснодара. Ознакомьтесь с огромным ассортиментом, что позволит отыскать как популярные, так и редкие лекарства. Цены всегда лояльные, остаются на среднем уровне, чтобы сделать приобретение смогли все желающие. Есть и такие аптеки, которые организуют доставку на дом. Представлена и инструкция по применению, можно ознакомиться с показаниями и противопоказаниями.
Jerrygeate · July 21, 2023 at 2:19 pm
https://qooh.me/galleyring68
JamesLeask · July 21, 2023 at 2:35 pm
https://seo.digitemple.net/domain/snus3.ink
Davidmoimi · July 21, 2023 at 3:23 pm
билинска алоэ вера
JamesLeask · July 21, 2023 at 3:33 pm
https://mozgram.com/domain/nordic-spirit.xyz
Jeremypem · July 21, 2023 at 3:33 pm
https://www.metooo.io/u/63265bdbba88547441a795c0
risunci_viess · July 21, 2023 at 3:56 pm
https://risunci.com
JamesLeask · July 21, 2023 at 4:31 pm
https://websitereport.blastersuite.com/domain/xtrime.bio
sweand · July 21, 2023 at 5:22 pm
will raising the minimum wage help the economy essay outline help writing college essay english editing service essay
JamesLeask · July 21, 2023 at 5:28 pm
https://seoazer.com/domain/seoanalyzer.gr/
cooksillustratedtv.com · July 21, 2023 at 5:42 pm
Hi, i feel that i saw you visited my weblog so i came to return the choose?.I am trying to find things to
enhance my web site!I suppose its adequate to make
use of a few of your concepts!!
my web page cooksillustratedtv.com
аренда ричтрака в минске · July 21, 2023 at 5:43 pm
I always spent my half an hour to read this weblog’s articles or reviews every day along with a cup of coffee.
emyanOthes · July 21, 2023 at 6:16 pm
На сайте https://www.botanica.photo/ вы сможете ознакомиться с фотостудией Ботаника, которая предлагает своим клиентам воспользоваться фотостудией с круглым окном 3,8 метра. У нас два зала – Зал Ботаника с высотой потолков 4 метра и Зал Циклорама с высотой потолков 6 метров. В стоимость аренды зала входит реквизит и свет высокого уровня. На сайте вы сможете ознакомиться с примерами съемок в зале.
JamesLeask · July 21, 2023 at 6:24 pm
https://www.mywebanalyser.com/domain/killa.pro
echayFum · July 21, 2023 at 6:30 pm
На сайте https://xn--1-7sba5anhi5b.xn--p1ai/ вы сможете приобрести качественные, сертифицированные напольные покрытия. Есть возможность выбрать ламинат любого цвета и с самым разным рисунком. Воспользуйтесь возможностью подобрать напольное покрытие по заданным параметрам. Есть ламинат с самыми разными, интересными эффектами, что позволит подобрать решение под определенный интерьер. Напольное покрытие обойдется недорого. Кроме того, поучится приобрести и другие сопутствующие товары.
DarellSPUPT · July 21, 2023 at 6:41 pm
https://travelservice.group/transfer
JamesLeask · July 21, 2023 at 7:28 pm
https://seo.hostsinimo.com/domain/snus1.site
olubeSpugh · July 21, 2023 at 7:34 pm
На сайте компании Надежные окна https://nadezhnye-okna.com/ вы сможете заказать изготовление и установку пластиковых окон недорого, а также услуги остекления и отделки балконов и лоджий. На сайте также представлен обширный каталог пластиковых окон и дверей, где вы сможете подобрать для себя необходимый ассортимент, а так также оставить заявку онлайн на покупку или просто консультацию.
JamesLeask · July 21, 2023 at 8:22 pm
https://www.seocult.com/analyze/domain/pablo.wiki
thousand palms california · July 21, 2023 at 8:40 pm
Having read this I thought it was extremely enlightening.
I appreciate you taking the time and effort to put this short article together.
I once again find myself personally spending way too
much time both reading and leaving comments. But so what, it was still worth
it!
Feel free to surf to my blog; thousand palms california
jeep fort lauderdale · July 21, 2023 at 8:45 pm
Thank you for sharing with us, I believe this website genuinely stands out :D.
Also visit my blog post jeep fort lauderdale
Минитрактор Скаут Т-18 (Generation II) · July 21, 2023 at 8:59 pm
Hey there, I think your website might be having browser compatibility issues.
When I look at your blog in Ie, it looks fine but when opening in Internet Explorer, it has
some overlapping. I just wanted to give you a quick heads
up! Other then that, awesome blog!
JamesLeask · July 21, 2023 at 9:17 pm
https://andascan.com/domain/xtrime.pro
Jerrygeate · July 21, 2023 at 9:19 pm
https://meidoryu.com/forums/users/irvinnicolle/
pixkino.ru · July 21, 2023 at 9:22 pm
Фильмы и тв программа онлайн и все бесплатно [url=]https://pixkino.ru/[/url]. Телепрограмма и самое популярное и интересное кино.
MAKANOI · July 21, 2023 at 9:32 pm
Hi, I do think this is a great site. I stumbledupon it 😉 I will
return yet again since i have saved as a favorite it. Money and freedom is the greatest way
to change, may you be rich and continue to help others.
JamesLeask · July 21, 2023 at 10:13 pm
https://tool.mediaofficers.com/domain/pablo1.live
Dana · July 21, 2023 at 10:26 pm
Fortunately, that provider is equally cost-effective: $2 for every month/$20 for each year for a person digital camera, or $10 per thirty day period/$100 per yr for an limitless amount of Wyze cameras.
My webpage … http://urbino.fh-Joanneum.at/trials/index.php/Find_Out_Now_What_Should_You_Do_For_Fast_Girls_On_Girls_Free_Video
Jeremypem · July 21, 2023 at 10:40 pm
https://ask.godotengine.org/user/fangpush45
BitcVbrnfinnagt · July 21, 2023 at 10:48 pm
Здесь можно легально [url=https://skachat-minecraft.xyz/]скачать Майнкрафт[/url] в России.
JamesLeask · July 21, 2023 at 11:08 pm
https://www.xigseoaudit.com/domain/disposable-vapes.gay
1win_emaic · July 21, 2023 at 11:37 pm
скачать 1 вин на телефон
JamesLeask · July 22, 2023 at 12:06 am
https://serpch.com/audit/domain/snusexpress365.help
avdeeGam · July 22, 2023 at 12:06 am
На сайте http://misokmv.ru/ вы сможете узнать всю необходимую информацию о «Международном институте современного образования». Вы находитесь на официальном портале этого учебного заведения и сможете получить всю необходимую информацию. Здесь обучают таким дисциплинам, как: государственная служба, менеджмент, экономика, педагогические дисциплины, парикмахерское дело. Если есть вопросы, то вы сможете их задать менеджеру, который даст ценные рекомендации, посоветует с выбором специальности.
kia dealership fort worth · July 22, 2023 at 12:40 am
Just wanna remark on few general things, The website design is perfect, the articles is really excellent :D.
my webpage – kia dealership fort worth
JamesLeask · July 22, 2023 at 1:01 am
https://seo.zioncentre.com/domain/snus1.xyz
JamesLeask · July 22, 2023 at 1:57 am
https://seo.zioncentre.com/domain/white-fox.live
JamesLeask · July 22, 2023 at 2:52 am
https://seoanalysis.dmslist.com/domain/niikotinipussit.fun
aranoLiece · July 22, 2023 at 3:09 am
https://ekblekar.info/ это официальный сайт Лавки Лекаря в Екатеринбурге, с более чем 1000 товаров в каталоге, которые вы сможете также купить в интернет магазине. Уникальные рецепты, своя школа оздоровления, собственное производство – все это делает нашу продукцию полезной для здоровья и долголетия.
Jerrygeate · July 22, 2023 at 3:37 am
https://click4r.com/posts/g/10069666/
Willardsiz · July 22, 2023 at 3:39 am
Прогон хрумером
JamesLeask · July 22, 2023 at 3:49 am
https://seo.crunchfource.com/domain/nordic-spirit.xyz
JamesLeask · July 22, 2023 at 4:46 am
https://audit.tophebergement.com/domain/nikotiinipussi1.xyz
dyakoKnisa · July 22, 2023 at 4:53 am
На сайте https://iz-medi.ru/ вы сможете приобрести шаровые краны из нержавеющей стали, а также гибкие подводки и многое другое по доступным ценам. Ознакомьтесь с полным каталогом товаров перед тем, как сделать приобретение. Почитайте и технические характеристики, а также ознакомьтесь с расценками. Если появились вопросы, то задайте их менеджеру, который проведет подробную консультацию и поможет с выбором. Вся продукция отличается долгим сроком службы, а также износостойкостью, произведена из высокотехнологичных, надежных материалов.
Jeremypem · July 22, 2023 at 5:09 am
https://coub.com/makeupcousin11
JamesLeask · July 22, 2023 at 5:41 am
https://xeoseo.com/domain/snus1.biz
las vegas car insurance · July 22, 2023 at 6:18 am
Excellent way of explaining, and good paragraph to get facts regarding my presentation subject, which i am going to present
in institution of higher education.
Feel free to visit my blog: las vegas car insurance
JamesLeask · July 22, 2023 at 6:37 am
https://hosting22.de/turboreviewer/domain/killa.pro
JamesLeask · July 22, 2023 at 7:37 am
https://seo.zioncentre.com/domain/xtrime.shop
JamesLeask · July 22, 2023 at 8:35 am
https://valordosite.com.br/domain/pablo.wiki
JamesLeask · July 22, 2023 at 9:32 am
https://www.website-analyzer.com/domain/nikotiinipussi.art
JamesLeask · July 22, 2023 at 10:29 am
https://www.siteoutlook.com/domain/zyn1.wiki
JamesLeask · July 22, 2023 at 11:26 am
https://www.seocheck.one/domain/xtrime.site
Jeremypem · July 22, 2023 at 11:34 am
https://intensedebate.com/people/judotrade9
ashalsmeri · July 22, 2023 at 12:04 pm
На сайте https://doersup.ru/ вы сможете ознакомиться с большим каталогом каплеструйных маркираторов, а также ударными и лазерными маркираторами. Оборудование для маркировки представлено в широком ассортименте, по доступным ценам. Осуществляется доставка как в Москве, так по всей России. Официальная гарантия на все оборудование от производителя. Товарный знак Doersup – это качество и надежность оборудования!
JamesLeask · July 22, 2023 at 12:22 pm
https://www.optimisu.com/domain/nikotiinipussi.pro
basovzoodo · July 22, 2023 at 12:25 pm
По ссылке https://proecodom.ru/bytovki/zhilaya/dlya-prozhivaniya/ закажите строительство бытовок для проживания: временного либо круглогодичного. Все работы выполняются «под ключ». Перед вами самые разные варианты, которые подходят для установки на объекте. Выбирайте домик, исходя из площади и целей. Регулярно организуются скидки, чтобы ваша покупка была более выгодной. К преимуществам заказа бытовок относят то, что вы экономите средства и время. А главное, что работники будут себя чувствовать в бытовке комфортно.
BitcVbesfinnagt · July 22, 2023 at 12:39 pm
Здесь можно легально [url=https://skachat-minecraft.info/]скачать Майнкрафт[/url].
JamesLeask · July 22, 2023 at 1:17 pm
https://www.seoanalyzercheck.com/domain/snusdirect24.bio
JamesLeask · July 22, 2023 at 2:13 pm
https://www.mm-seotool.in/domain/skruf.wiki
Marianep · July 22, 2023 at 2:54 pm
Благодаря 3d печать титаном в минске , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JamesLeask · July 22, 2023 at 3:08 pm
https://iseoreview.com/domain/nikotiinipussi1.pics
chesnlic · July 22, 2023 at 3:15 pm
На сайте https://dinavto.ru/ вы сможете приобрести легковые, грузовые запчасти, а также ознакомиться с каталогом товаров, чтобы выбрать наиболее подходящий вариант и именно на автомобиль своей марки и модели. Для подбора необходимо только кликнуть по марке автомобиля, после чего откроется дополнительная информация, сужающая поиск. Подыщите вариант по артикулу, наименованию. В справочниках автотоваров находятся аксессуары, лампы, автохимия и масла, колпаки, аккумуляторы. Есть раздел с товарами, которые в наличии.
JamesLeask · July 22, 2023 at 4:04 pm
https://seo.alatharmarketing.com/domain/snus1.net
Jerrygeate · July 22, 2023 at 4:26 pm
https://doodleordie.com/profile/pathdebt4
JamesLeask · July 22, 2023 at 5:00 pm
https://hosting22.de/turboreviewer/domain/snus3.ink
xem trực tiếp bóng đá xoilac 17 · July 22, 2023 at 5:10 pm
This is a topic that is close to my heart…
Thank you! Exactly where are your contact details though?
Педагогам · July 22, 2023 at 5:17 pm
[url=https://kursy-perepodgotovki-dlja-pedagogov.ru/]Курсы переподготовки для педагогов[/url]
Преподавательское образование является важным составляющим цельных общественных общественный порядок, поэтому расписания переподготовки преподавателей имеют шибко рослую значимость чтобы регулировки значения профессиональной подготовки сотрудников.
Курсы переподготовки для педагогов
Педагоги · July 22, 2023 at 5:26 pm
[url=https://kursy-povyshenija-kvalifikacii-dlja-pedagogov.ru/]Курсы повышения квалификации для педагогов[/url]
Педагоги – главная часть профессиональной деловитости на современном образовании. Шиздец педагоги нуждаются на непрерывном увеличении квалификации, чтобы справляться с цельными проблемами, тот или другой возложены на них.
Курсы повышения квалификации для педагогов
JamesLeask · July 22, 2023 at 5:56 pm
http://seo.impekt.io/domain/disposable-vapes.xyz
Педагогам · July 22, 2023 at 6:43 pm
[url=https://kursy-perepodgotovki-dlja-pedagogov.ru/]Курсы переподготовки для педагогов[/url]
Педагогическое образование является важным составляющим всех без исключения общественных строев, то-то расписания переподготовки педагогов имеют очень высокую ценность чтобы регулировки степени проф подготовки сотрудников.
Курсы переподготовки для педагогов
service_Gox · July 22, 2023 at 6:44 pm
5 signs an instagram store cant be trusted https://service-clean-instagram.com/
JamesLeask · July 22, 2023 at 6:51 pm
https://mozgram.com/domain/pablo-snus.wiki
Педагоги · July 22, 2023 at 6:52 pm
[url=https://kursy-povyshenija-kvalifikacii-dlja-pedagogov.ru/]Курсы повышения квалификации для педагогов[/url]
Учителя – наиглавнейшая юрчасть профессиональной деятельности на сегодняшнем образовании. Шиздец учителя нуждаются в течение постоянном возростании квалификации, чтобы управляться с цельными задачами, каковые возложены на них.
Курсы повышения квалификации для педагогов
JamesLeask · July 22, 2023 at 7:46 pm
https://script12.prothemes.biz/domain/pablo-snus.xyz
JamesLeask · July 22, 2023 at 8:42 pm
https://app.mathewdigital.com/domain/pablo1.pro
RickyCaf · July 22, 2023 at 9:09 pm
рецензия на статью по юриспруденции
VictorPsymn · July 22, 2023 at 9:12 pm
рецензия на экономическую статью
JamesLeask · July 22, 2023 at 9:37 pm
https://seo.terrahost.org/domain/blck1.bio
RickyCaf · July 22, 2023 at 10:15 pm
диссертация по эффективности предприятия
VictorPsymn · July 22, 2023 at 10:17 pm
диссертация по экономическому анализу
JamesLeask · July 22, 2023 at 10:35 pm
https://www.myseotoolkit.com/domain/zyn1.wiki
RickyCaf · July 22, 2023 at 11:19 pm
курсовая работа по логистике
Jerrygeate · July 22, 2023 at 11:23 pm
https://unsplash.com/@versesinger1
VictorPsymn · July 22, 2023 at 11:24 pm
курсовая работа по магазину
JamesLeask · July 22, 2023 at 11:32 pm
https://seo.zioncentre.com/domain/disposable-vapes.art
StevenEromb · July 23, 2023 at 12:19 am
pharmacy review Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
RickyCaf · July 23, 2023 at 12:22 am
курсовую работу доработать
JamesLeask · July 23, 2023 at 12:29 am
https://www.seodio.com/domain/snusexpress365.bar
VictorPsymn · July 23, 2023 at 12:31 am
курсовые медицинский колледж
pakhoRam · July 23, 2023 at 12:40 am
На сайте https://liderbux.pro/ вы сможете воспользоваться универсальным и уникальным сервисом, который поможет продвинуть свой бизнес. Важным моментом является то, что вы сможете рассчитывать на выгодные расценки на рекламу. Получите отличный заработок, стабильный, гарантированный доход. Сервис предлагает огромные возможности для вашего бизнеса. К примеру, вы сможете создать задание всего за пару минут, воспользоваться простым интерфейсом и легким таргетингом. Для клиентов доступна расширенная статистика, которая позволит провести анализ рекламных акций.
JamesLeask · July 23, 2023 at 1:24 am
https://seo.onlinepro.gr/domain/snusdirect24.bio
RickyCaf · July 23, 2023 at 1:25 am
контрольная работа по социологии на заказ
VictorPsymn · July 23, 2023 at 1:39 am
контрольная работа по статике
ubtsoWed · July 23, 2023 at 1:59 am
На сайте https://gavpet.com/ вы сможете связаться с волонтерами для того, чтобы помочь бездомным животным. Так у вас получится сделать пожертвование им на корм, необходимые вещи. В течение длительного времени команда единомышленников посещает приют для того, чтобы облегчить жизнь братьев меньших. За все время его существования удалось спасти огромное количество животных от безответственных владельцев. Животные вылечены, кинологи обучили четвероногих питомцев тому, как правильно общаться с человеком.
StevenEromb · July 23, 2023 at 2:06 am
pharmacy canadian Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 23, 2023 at 2:19 am
https://dimostrativo.site/domain/nikotiinipussi.art
RickyCaf · July 23, 2023 at 2:29 am
научная статья по практике
Jeremypem · July 23, 2023 at 2:40 am
https://penzu.com/p/555ffec4
VictorPsymn · July 23, 2023 at 2:46 am
научная статья по предпринимательскому праву
JamesLeask · July 23, 2023 at 3:15 am
http://analayzer.seoxbusiness.com/domain/snus1.chat
RickyCaf · July 23, 2023 at 3:32 am
индивидуальный отчет по практике
StevenEromb · July 23, 2023 at 3:52 am
discount online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
VictorPsymn · July 23, 2023 at 3:55 am
игры решение задач
частное порно видео · July 23, 2023 at 4:03 am
частное порно видео
JamesLeask · July 23, 2023 at 4:14 am
https://www.seodio.com/domain/siberia1.ink
RickyCaf · July 23, 2023 at 4:35 am
курсовая работа девиантное поведение на заказ
VictorPsymn · July 23, 2023 at 5:05 am
курсовая работа декоративно прикладное искусство
JamesLeask · July 23, 2023 at 5:12 am
http://www.reporteseo.online/domain/nikotiinipussi1.xyz
RickyCaf · July 23, 2023 at 5:39 am
рецензия на научную статью по психологии
StevenEromb · July 23, 2023 at 5:39 am
best online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 23, 2023 at 6:10 am
https://iseoreview.com/domain/nordic-spirit.shop
VictorPsymn · July 23, 2023 at 6:14 am
рецензия на научную статью по педагогике
RickyCaf · July 23, 2023 at 6:43 am
диссертация по управлению персоналом
Jerrygeate · July 23, 2023 at 6:45 am
https://repo.getmonero.org/frosttheory55
JamesLeask · July 23, 2023 at 7:08 am
https://www.lacivertmedya.com/seo-analizi/domain/white-fox.live
RickyCaf · July 23, 2023 at 8:33 am
курсовая работа по косметологии
VictorPsymn · July 23, 2023 at 9:33 am
курсовая работа социальное обеспечение военнослужащих заказать
RickyCaf · July 23, 2023 at 9:39 am
курсовая работа связи с общественностью на заказ
JamesLeask · July 23, 2023 at 10:04 am
https://www.d-marketinghub.com/webanalyzer/domain/disposable-vape.fun
slezhka_rhymn · July 23, 2023 at 10:08 am
сервис для слежки в вк https://online-slezhka-vk.ru/
VictorPsymn · July 23, 2023 at 10:40 am
контрольная работа по педагогике для студентов заочников
RickyCaf · July 23, 2023 at 10:45 am
контрольная работа по немецкому
StevenEromb · July 23, 2023 at 10:53 am
walgreens pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Jeremypem · July 23, 2023 at 11:01 am
http://int79.co.kr/g5/bbs/board.php?bo_table=wen1qthgao&wr_id=72633
JamesLeask · July 23, 2023 at 11:02 am
https://seoanalysis.dmslist.com/domain/snus1.biz
카지노친구 · July 23, 2023 at 11:26 am
Reload and Cashback bonuses are nevertheless accessible
tto pplayers even although they have lately lost
some of their prominences.
Also visit my site: 카지노친구
VictorPsymn · July 23, 2023 at 11:47 am
научная статья по медицине
RickyCaf · July 23, 2023 at 11:51 am
научная статья по машиностроению
JamesLeask · July 23, 2023 at 12:00 pm
https://www.whoisua.com/domain/snus1.pro
1980 toyota corolla · July 23, 2023 at 12:29 pm
Howdy! I could have sworn I’ve been to this website before but after checking through some of the post
I realized it’s new to me. Anyways, I’m definitely delighted I found it and I’ll be
bookmarking and checking back often!
Feel free to surf to my page; 1980 toyota corolla
StevenEromb · July 23, 2023 at 12:35 pm
canadian pharmacy viagra generic Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
bochksnisk · July 23, 2023 at 12:53 pm
По ссылке https://play.google.com/store/apps/details?id=com.cas1n0onl1ne.slotssevenma вы сможете насладиться игрой в казино онлайн, игровые автоматы. Перед вами огромный выбор развлечений на самый требовательный вкус. Казино работает на прозрачных условиях, честно и в обозначенные сроки выдает средства. Такая игра предоставляет уникальную возможность заработать на то, о чем вы давно мечтали. Здесь понятный интерфейс, а потому вы легко сориентируетесь в информации. Заходите сюда для проведения зажигательного досуга.
VictorPsymn · July 23, 2023 at 12:55 pm
защита доклад по защите
RickyCaf · July 23, 2023 at 12:58 pm
защита диплома по
JamesLeask · July 23, 2023 at 12:58 pm
https://www.myseotoolkit.com/domain/snusexpress365.pro
JamesLeask · July 23, 2023 at 1:57 pm
https://www.webdesignplusseo.com/freeseoaudittools/domain/siberia1.bio
VictorPsymn · July 23, 2023 at 2:02 pm
курсовая работа государственная социальная помощь
Порно видео · July 23, 2023 at 2:06 pm
Порно видео
RickyCaf · July 23, 2023 at 2:07 pm
курсовая работа государственная служба
StevenEromb · July 23, 2023 at 2:17 pm
online pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Estebanempixelm · July 23, 2023 at 2:22 pm
artritis
JamesLeask · July 23, 2023 at 2:56 pm
https://proseoanalyzer.com/domain/skruf.wiki
частное порно · July 23, 2023 at 3:13 pm
частное порно
VictorPsymn · July 23, 2023 at 3:15 pm
рецензия на магистерскую диссертацию юриспруденция
JamesLeask · July 23, 2023 at 3:55 pm
https://seodash.online/domain/snus1.ink
StevenEromb · July 23, 2023 at 3:57 pm
buy prescription drugs canada Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
RickyCaf · July 23, 2023 at 4:07 pm
рецензия на историческую статью
VictorPsymn · July 23, 2023 at 4:29 pm
диссертация по правовым отношениям
monro_viess · July 23, 2023 at 4:52 pm
Казино Monro
JamesLeask · July 23, 2023 at 4:53 pm
https://tools.searchenginenotes.com/domain/disposable-vapes.gay
RickyCaf · July 23, 2023 at 5:13 pm
диссертация по охране труда
аренда ричтрака в минске · July 23, 2023 at 5:14 pm
Keep this going please, great job!
VictorPsymn · July 23, 2023 at 5:43 pm
курсовая работа по истории
JamesLeask · July 23, 2023 at 5:52 pm
https://www.seopro.tools/domain/disposable-vape.site/6kSs64b84c692df15
RickyCaf · July 23, 2023 at 6:17 pm
курсовая работа по информационному праву на заказ
JamesLeask · July 23, 2023 at 6:51 pm
https://webtools-abc.xyz/domain/snus2.live/fAjk64b774a4a9e0d
VictorPsymn · July 23, 2023 at 6:57 pm
юридическая техника курсовая
StevenEromb · July 23, 2023 at 7:17 pm
canadian pharmacy no prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Jeremypem · July 23, 2023 at 7:18 pm
https://canvas.instructure.com/eportfolios/2182377/Home/Las_mejores_agencias_de_marketing_en_Chile_cmo_elegir_una
RickyCaf · July 23, 2023 at 7:22 pm
эссе я лидер
ufa88pro ทางเข้า · July 23, 2023 at 7:32 pm
I like it when people come together and share views.
Great website, keep it up!
JamesViefs · July 23, 2023 at 7:43 pm
https://tvrts.ru/news/kak-organizovat-vyvoz-stroitelnogo-musora/
JamesLeask · July 23, 2023 at 7:50 pm
https://seogoogleanalytics.com/domain/disposable-vapes.ink
VictorPsymn · July 23, 2023 at 8:12 pm
контрольная работа по логистике
RickyCaf · July 23, 2023 at 8:26 pm
контрольная работа по литературе для спо
JamesLeask · July 23, 2023 at 8:49 pm
https://www.seoanalyzercheck.com/domain/niikotinipussit.fun
ProFullCracks516 · July 23, 2023 at 9:17 pm
Rank Tracker 8.45.14 Crack With Activation Code Download https://profullcracks.com/rank-tracker-8-45-14-crack-with-activation-code-download-2023/
escortsineastlondon.com · July 23, 2023 at 9:21 pm
I don’t even know how I ended up here, but I thought this post was great.
I do not know who you are but certainly you are going to a famous blogger if you aren’t already 😉 Cheers!
my blog post: escortsineastlondon.com
VictorPsymn · July 23, 2023 at 9:26 pm
научная статья по информационным технологиям
RickyCaf · July 23, 2023 at 9:31 pm
научная статья по инженерным сетям
JamesLeask · July 23, 2023 at 9:48 pm
https://evelink.es/domain/pablo1.xyz
StevenEromb · July 23, 2023 at 10:31 pm
online medication pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 23, 2023 at 10:47 pm
https://www.xigseoaudit.com/domain/snus1.org
Jerrygeate · July 23, 2023 at 11:15 pm
https://www.metooo.io/u/63265fef7b29957440c67e3c
JamesLeask · July 23, 2023 at 11:45 pm
https://seoanalyzer.gr/domain/killa1.shop
StevenEromb · July 24, 2023 at 12:10 am
canadian pharmaceuticals online safe Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesLeask · July 24, 2023 at 12:41 am
https://www.bestfreeseotools.co/domain/elf-bar1.ink
RubenTer · July 24, 2023 at 12:53 am
Polskie kasyna online sa popularnym miejscem rozrywki dla wielu osob, ktore szukaja emocji i adrenaliny zwiazanych z grami hazardowymi. Oferuja one roznorodne gry internetowe casino, takie jak automaty, poker, ruletka i wiele innych, co pozwala graczom wybrac swoje ulubione i zanurzyc sie w fascynujacym swiecie hazardu.
lesnikCrern · July 24, 2023 at 1:08 am
На сайте https://epil-m.ru/ запишитесь на такую бьюти-процедуру, как электроэпиляция, которая полностью избавляет от нежелательных волосков на теле. К важным преимуществам относят то, что фолликулы исчезают окончательно. Кроме того, услуга оказывается по привлекательной стоимости, у нее минимальный набор противопоказаний. Используется на самых разных участках тела. Расценки на услуги указаны чуть ниже. Вы сможете ознакомиться с ними прямо сейчас. А для того, чтобы убедиться в том, что здесь оказываются услуги профессионально, почитайте отзывы.
Diyarbakır Escort · July 24, 2023 at 1:23 am
Hello, Neat post. There’s a problem along with your website in internet explorer, could check this?
IE still is the marketplace chief and a good section of other
people will leave out your magnificent writing because
of this problem.
iharare_viess · July 24, 2023 at 1:26 am
Discover if Nelisiwe Sibiya is really a Sangoma on iHarare.
JamesLeask · July 24, 2023 at 1:37 am
https://seo.onlinepro.gr/domain/elf-bar1.life
tucson u pull it · July 24, 2023 at 1:39 am
I genuinely prize your piece of work, Great post.
Here is my blog tucson u pull it
StevenEromb · July 24, 2023 at 1:51 am
canada drug store Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
שיחות סקס בעברית וערבית ☎️ עם ישראליות וערביות חרמניות · July 24, 2023 at 2:24 am
I will right away clutch your rss feed as I can not to find your
e-mail subscription link or newsletter service.
Do you’ve any? Please permit me recognise in order that I
could subscribe. Thanks.
JamesLeask · July 24, 2023 at 2:34 am
https://app.websiteseostats.com/domain/nicotine-pouches.help
StevenEromb · July 24, 2023 at 3:31 am
prescription prices canadian meds Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
internetmama.ru · July 24, 2023 at 3:46 am
программа, которая блокирует сайты 18+ содержания. [url=]https://www.internetmama.ru/[/url]. Электронный журнал “ИнтернетМама”
JamesLeask · July 24, 2023 at 7:19 am
https://analyseor.com/domain/elf-bar.wiki
JimmyTaura · July 24, 2023 at 8:12 am
курсовая работа по педагогике
elavil tablet · July 24, 2023 at 8:15 am
cheap buspar buspar tablets buspar 5 mg purchase
JamesLeask · July 24, 2023 at 8:17 am
https://www.seoanalyzercheck.com/domain/disposable-vapes.ink
JimmyTaura · July 24, 2023 at 9:25 am
заказать чертежи для диплома в москве
JamesLeask · July 24, 2023 at 10:15 am
https://xeoseo.com/domain/snus1.net
สมัคร บาคาร่า ออนไลน์ · July 24, 2023 at 10:19 am
An impressive share! I have just forwarded this onto a
colleague who had been conducting a little homework on this.
And he actually ordered me dinner because I stumbled upon it for him…
lol. So allow me to reword this…. Thank YOU for the meal!!
But yeah, thanx for spending some time to talk about this subject here on your site.
JimmyTaura · July 24, 2023 at 10:39 am
ргр по теоретической механике
Вебинары · July 24, 2023 at 10:43 am
[url=https://vebinary-s-polucheniem-sertifikata-besplatno.ru/]Бесплатные вебинары с получением сертификата[/url]
Бесплатные вебинары могут быть очень нужными для людишек, тот или другой ищут службу, поскольку город деют эвентуальность наварить практичные знания а также способности чтобы испoлнeния конкретных задач.
Бесплатные вебинары с получением сертификата
Конкурсы · July 24, 2023 at 10:49 am
[url=https://onlajn-konkursy-s-polucheniem-diploma.ru/]Онлайн конкурсы с получением диплома[/url]
Наши учителя понимают, как эпохально для подростков да полных создания получать эмпирия, выражать. ant. скрывать креативные способности также оцениваться. Поэтому я зовем абсолютно всех на разные онлайн состязания начиная с. ant. до получением диплома.
Онлайн конкурсы с получением диплома
정부지원대출 · July 24, 2023 at 10:56 am
Turn Around Time – Generally, one ccan acquire loan aproval in two or three functioning days.
Feel free to surf to my site: 정부지원대출
JamesLeask · July 24, 2023 at 11:13 am
https://tools.pixelized.co/scan/domain/snus1.site
JimmyTaura · July 24, 2023 at 11:53 am
курсовая работа физиотерапия в неврологии на заказ
JamesLeask · July 24, 2023 at 12:12 pm
http://analayzer.seoxbusiness.com/domain/disposable-vapes.wiki
casino79.in · July 24, 2023 at 12:18 pm
What genuinely stoo out for us was the variety of video poker games with 17 varieties that wioll definitely entertain.
Visit my webpage … casino79.in
Вебинары · July 24, 2023 at 12:26 pm
[url=https://vebinary-s-polucheniem-sertifikata-besplatno.ru/]Бесплатные вебинары с получением сертификата[/url]
Даровые вебинары могут крыться шибко полезными чтобы людишек, коие ищут произведение, так как город предоставляют возможность выбить утилитарные ученость а также способности для исполненья конкретных задач.
Бесплатные вебинары с получением сертификата
Конкурсы · July 24, 2023 at 12:39 pm
[url=https://onlajn-konkursy-s-polucheniem-diploma.ru/]Онлайн конкурсы с получением диплома[/url]
Наши учителя соображают, яко эпохально чтобы подростков и всех образования получать опыт, выражать. ant. скрывать креативный чувствилище и еще оцениваться. То-то я зовем абсолютно всех сверху различные онлайн состязания всего получением диплома.
Онлайн конкурсы с получением диплома
JimmyTaura · July 24, 2023 at 1:09 pm
купить вкр магистра
JamesLeask · July 24, 2023 at 2:08 pm
http://seo.impekt.io/domain/pablo.fun
JimmyTaura · July 24, 2023 at 2:22 pm
дипломная работа проектирование
JamesLeask · July 24, 2023 at 3:05 pm
https://webtoolsy.com/domain/siberia1.bio/bZDN64b733f50e224
DonaldMaymn · July 24, 2023 at 3:59 pm
кракен даркнет официальный сайт
JamesLeask · July 24, 2023 at 4:03 pm
https://www.webdotsolution.com/website-analyser/domain/velo1.fun
เว็บเรทดีที่สุด · July 24, 2023 at 4:45 pm
I must thank you for the efforts you’ve put in penning
this website. I really hope to see the same high-grade content
from you later on as well. In truth, your creative writing abilities has
inspired me to get my own website now 😉
JamesLeask · July 24, 2023 at 5:00 pm
https://seogoogleanalytics.com/domain/snusdirect.life
DonaldMaymn · July 24, 2023 at 5:09 pm
kraken площадка даркнет
JamesLeask · July 24, 2023 at 5:57 pm
https://seoserpo.com/public/freeseo/domain/snusdirect24.pro
DonaldMaymn · July 24, 2023 at 6:04 pm
кракен наркоплощадка
wedding flowers · July 24, 2023 at 6:12 pm
I know this if off topic but I’m looking into starting my own weblog and was wondering what all is required
to get setup? I’m assuming having a blog like yours would cost a pretty penny?
I’m not very internet smart so I’m not 100% certain. Any suggestions or advice would be greatly appreciated.
Kudos
накрутка просмотров яппи · July 24, 2023 at 6:43 pm
Appreciation to my father who told me about this webpage, this website is actually remarkable.
JamesLeask · July 24, 2023 at 6:55 pm
https://simplifiedseotools.com/seo-site-audit/domain/snusexpress365.pro
locksmith · July 24, 2023 at 7:35 pm
Hello, all is going well here and ofcourse every one is sharing information, that’s in fact fine, keep up writing.
My web page: locksmith
smotri-dom2.ru · July 24, 2023 at 7:38 pm
Дом 2 – самое популярное реалити шоу онлайн бесплатно [url=]https://www.smotri-dom2.ru/[/url].
Дом 2 онлайн.
JamesLeask · July 24, 2023 at 7:54 pm
https://seoanalyzer.gr/domain/snusdirect24.bio
klining_emaic · July 24, 2023 at 8:13 pm
клининговая компания в https://reiting-klininga.ru/
JamesLeask · July 24, 2023 at 8:51 pm
https://seoanalysis.dmslist.com/domain/nikotiinipussi.art
kulakRib · July 24, 2023 at 9:00 pm
На сайте https://dosug76.info/ вы сможете заказать девушку для любовных утех. Все дамы раскрепощенные, доставят огромное количество ярких, приятных эмоций. Они очень ласковые, нежные, красивые, а потому подарят радость каждому мужчине, который желает провести время с обворожительными красотками. Есть как зрелые дамы, так и совсем юные и свежие. Все девушки отличаются доступной стоимостью, готовы принять в любое, наиболее комфортное для вас время. Снимите их на час или более. А при необходимости можете позвать друзей.
JamesLeask · July 24, 2023 at 9:49 pm
https://www.webdotsolution.com/website-analyser/domain/nikotiinipussi1.bio
dimkainera · July 24, 2023 at 9:58 pm
F.H.M Group https://fhm.group/ это ведущая компания, которая предлагает товары для кемпинга и туризма и снаряжение для активного отдыха. Огромный каталог товаров, позволит вам выбрать настоящие, качественные товары, которые будут служить долго, которые удобны и оценены экспертами. Снаряжение для туризма и активного отдыха, кемпинга – это свобода в выборе мест отдыха и незабываемые впечатления!
토토사이트검증 · July 24, 2023 at 10:38 pm
So, if everybody is favoring teeam A, you would bet against them if you wanted to
fade the public.
My web page; 토토사이트검증
JamesLeask · July 24, 2023 at 10:47 pm
https://www.seolab.me/domain/siberia1.ink
grishihob · July 24, 2023 at 11:16 pm
Na stránke https://casinorating-slovakia.com/casino/doxxbet-casino/ si môžete prečítať recenziu na DOXXbet, ktorý je licencovaný Úradom pre lotérie a hazard. Viac ako 140 hier, ktoré vám pomôžu nájsť svoje obľúbené. Trvalé bonusy a kasínové propagácie nenechajú nikoho ľahostajným a umožnia vám užiť si tento proces naplno.
karpoUrism · July 24, 2023 at 11:17 pm
На сайте https://pod1.ru/ вы сможете приобрести подшипниковые узлы, а также подшипники как в розницу, так и оптом с оперативной доставкой по всей России. Перед вами огромный ассортимент продукции, которую вы сможете заказать в любое время и независимо от количества. Все конструкции выполнены из высокотехнологичных, инновационных материалов, которые невосприимчивы к появлению коррозии, а также перепадам температуры. При необходимости будут предоставлены профессиональные консультации.
JamesLeask · July 24, 2023 at 11:44 pm
https://seoserpo.com/public/freeseo/domain/snusdirect.pro
BitcVbeifinnagt · July 24, 2023 at 11:53 pm
Best exchanger24 for [url=https://exchanger24.org/xchange_btc_to_pmusd/]Bitcoin to PerfectMoney[/url].
khipoSweed · July 25, 2023 at 1:23 am
На сайте https://www.nkdancestudio.ru/ вы сможете записаться в школу танцев. Здесь преподают только лучшие учителя, которые отличаются огромным опытом и желанием научить клиента движениям. Танцы помогут вам раскрепоститься, получить от жизни больше приятных эмоций, впечатлений. В специальном разделе вы сможете почитать всю интересующую вас информацию о тренерах. Занятия проходят в наиболее комфортное для вас время, а потому не придется подстраиваться под график. Здесь преподают самые разные направления танцев.
JamesLeask · July 25, 2023 at 1:34 am
https://www.marketopedia.net/website-reviewer/domain/pablo-snus.wiki
JamesLeask · July 25, 2023 at 2:30 am
https://seo.zioncentre.com/domain/zyn1.gay
JamesLeask · July 25, 2023 at 3:26 am
https://www.seocult.com/analyze/domain/disposable-vapes.bio
instrumentals rock · July 25, 2023 at 4:13 am
I don’t know if it’s just me or if perhaps everybody else experiencing problems with your website.
It appears as though some of the written text on your content are running off the screen. Can someone else
please provide feedback and let me know if this is happening to them too?
This may be a issue with my web browser because I’ve had this happen before.
Appreciate it
mellow fellow · July 25, 2023 at 4:14 am
It’s perfect time to make some plans for the
longer term and it’s time to be happy. I have read this publish
and if I could I desire to counsel you few interesting issues or tips.
Perhaps you can write next articles relating to this article.
I wish to learn more issues about it!
JamesLeask · July 25, 2023 at 4:23 am
https://checkyoursites.com/domain/xtrime.bio
JamesLeask · July 25, 2023 at 5:19 am
https://www.seoanalyzercheck.com/domain/killa1.shop
заявка на кредит в банк открытие онлайн · July 25, 2023 at 6:02 am
заявка на кредит в банк открытие онлайн
abramoBiody · July 25, 2023 at 6:23 am
На сайте https://jay.com.ua/ ознакомьтесь с актуальными, интересными новостями, которые касаются всех, без исключения, а особенно жителей Украины. Здесь есть информация на самые разные темы, включая экономику, политику, культуру и многое другое. Все данные проверенные, актуальные, а потому в них не нужно сомневаться. Здесь вы найдете все, что вас интересует. Опубликованы и высказывания политиков, информация, касающаяся спецоперации и многого другого. И самое главное, что новости составлены истинными профи, которые знают, чем вас заинтересовать.
Sup Wigs · July 25, 2023 at 7:32 am
No matter if some one searches for his vital thing, thus he/she wishes to be available that in detail, thus
that thing is maintained over here.
Порно по категориям · July 25, 2023 at 8:17 am
Порно по категориям
RickyCaf · July 25, 2023 at 8:31 am
эссе об инвестициях
JamesVaf · July 25, 2023 at 8:33 am
https://tents-guide.com
Oscarnup · July 25, 2023 at 8:43 am
https://intellectika.ru/bitrix/redirect.php?goto=https://killapods.eu/
RickyCaf · July 25, 2023 at 11:38 am
эссе на тему труд
Oscarnup · July 25, 2023 at 11:50 am
https://ore.spongepowered.org/linkout?remoteUrl=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
JamesVaf · July 25, 2023 at 12:20 pm
tents guide
tiendas en fuencarral · July 25, 2023 at 12:21 pm
great issues altogether, you simply received a new reader.
What may you suggest in regards to your post that you made some days
in the past? Any positive?
Oscarnup · July 25, 2023 at 12:53 pm
https://xn--90afqsbambik.xn--p1ai/bitrix/rk.php?goto=https://killapods.eu/
Thomasobjep · July 25, 2023 at 12:58 pm
https://vladnews.ru/2023-04-13/218067/preimushchestva_vyvoza
RickyCaf · July 25, 2023 at 1:09 pm
строительная механика решение задач онлайн
grainwinnowing · July 25, 2023 at 1:16 pm
[url=https://grain-winnowing-machine.dp.ua]https://grain-winnowing-machine.dp.ua[/url]
Bit cleaning machines are agricultural tack that is inescapable conducive to the effectual manoeuvre of each corn harvesting production.
grain-winnowing-machine.dp.ua
JamesVaf · July 25, 2023 at 1:32 pm
tents comparison
สล็อตเว็บตรง · July 25, 2023 at 1:35 pm
Thank you for every other informative web site.
Where else may I am getting that type of information written in such a perfect method?
I have a challenge that I am just now working on, and I’ve been on the look out for such
info.
Also visit my web site … สล็อตเว็บตรง
Oscarnup · July 25, 2023 at 1:56 pm
http://truck.autoeuro.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
JamesVaf · July 25, 2023 at 2:37 pm
best 10-person tents
Oscarnup · July 25, 2023 at 2:59 pm
https://www.google.com.gt/url?q=https://killapods.eu/
gnatoMob · July 25, 2023 at 3:27 pm
На сайте https://dosug-gelendzhik.ru вы выберете девушку для релакса, приятного и восхитительного времяпрепровождения. Только для вас самые отвязные, симпатичные и красивые девчонки, которые ждут вас в своих апартаментах. Они подарят вам свою ласку, сделают так, чтобы вы захотели вернуться к ним вновь. Позвольте себе плотские утехи высокого класса и для искушенных. Это ваша возможность отдохнуть в компании привлекательных барышень. Можно подобрать любую девушку на свой вкус. Полненькие, брюнетки или блондинки – кого выберете вы?
JimmyTaura · July 25, 2023 at 3:42 pm
решение задач по теории игр онлайн
Oscarnup · July 25, 2023 at 3:58 pm
http://unibeauty.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
grainwinnowing · July 25, 2023 at 4:28 pm
[url=https://grain-winnowing-machine.dp.ua]https://grain-winnowing-machine.dp.ua[/url]
Grist cleaning machines are agricultural equipment that is necessary in return the effectual private dick of each grain harvesting production.
grain-winnowing-machine.dp.ua
mentemut · July 25, 2023 at 4:34 pm
На сайте https://abcnews.in.ua/ представлены самые интересные, свежие новости Украины. Они на разную тему, в том числе, политика, экономика, медицина, здоровье, криминал, спорт. Есть данные относительно спецоперации. Все новости свежие, обязательно вызовут у вас интерес, если вы хотите знать все о своей стране, а также то, что происходит в мире. Имеются и различные любопытные статьи, которые прольют свет на многочисленные вопросы. Данные о спецоперации ежедневно обновляются, чтобы предоставить только свежие данные.
JimmyTaura · July 25, 2023 at 4:34 pm
заказать курсовую работу онлайн недорого
StevenEromb · July 25, 2023 at 4:53 pm
canadian pharmaceuticals online Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Oscarnup · July 25, 2023 at 4:57 pm
http://vtsoft.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
JimmyTaura · July 25, 2023 at 5:26 pm
лыжный спорт написать реферат
накрутка подписчиков в яппи · July 25, 2023 at 6:11 pm
I am sure this piece of writing has touched all the internet viewers, its really really nice article on building up new blog.
StevenEromb · July 25, 2023 at 6:43 pm
canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Oscarnup · July 25, 2023 at 6:56 pm
http://alt1.toolbarqueries.google.com.pa/url?q=https://killapods.eu/
smotri-online-tv.ru · July 25, 2023 at 7:25 pm
Для того чтобы смотреть интернет телевидение онлайн бесплатно [url=]https://www.smotri-online-tv.ru/[/url]. Онлайн ТВ и Фильмы онлайн.
Oscarnup · July 25, 2023 at 7:55 pm
http://banner.grodno.net/openx/www/delivery/ck.php?ct=1&oaparams=2__bannerid=999__zoneid=0__cb=81fee3552c__oadest=https%3a%2f%2fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
news_viess · July 25, 2023 at 8:06 pm
Черкассы новости за сегодня
gurovimata · July 25, 2023 at 8:54 pm
Официальный сайт SoftPortal https://softportal.ru.net/ где вы сможете скачать софт для виндовс без смс и регистрации. Программы скачать бесплатно для windows. Большой выбор софта – постоянное обновление каталога с программами и различным софтом позволят вам найти необходимый софт быстро и в одном месте.
Oscarnup · July 25, 2023 at 8:54 pm
http://78.rospotrebnadzor.ru/687/-/asset_publisher/6Qrb/content/%D0%BF%D1%80%D0%BE%D1%84%D0%B8%D0%BB%D0%B0%D0%BA%D1%82%D0%B8%D0%BA%D0%B0-%D0%B3%D1%80%D0%B8%D0%BF%D0%BF%D0%B0-%D0%BE%D1%80%D0%B2%D0%B8-%D0%B8-%D0%BA%D0%BE%D1%80%D0%BE%D0%BD%D0%B0%D0%B2%D0%B8%D1%80%D1%83%D1%81%D0%BD%D0%BE%D0%B8-%D0%B8%D0%BD%D1%84%D0%B5%D0%BA%D1%86%D0%B8%D0%B8-1?redirect=http%3A%2F%2Fkillapods.eu
JamesViefs · July 25, 2023 at 9:38 pm
https://www.business-vector.info/kak-vybrat-nadezhnuju-kompaniju-161586/
ryushMeeta · July 25, 2023 at 9:51 pm
На сайте https://jenskiyjournal.ru/zdorove/salnye-volosy-chto-delat/ вы прочитаете интересную статью о том, почему появляются сальные волосы и что делать чтобы избавиться от сальных волос, а также советы как правильно ухаживать за волосами. Подробный материал рекомендован всем для ознакомления.
Oscarnup · July 25, 2023 at 9:53 pm
http://l.hamropatro.com/https%3A%2F%2Fkillapods.eu
arikoadved · July 25, 2023 at 9:56 pm
На сайте https://dosug-gelendzhik.ru вы сможете найти роскошную, привлекательную и красивую девушку для приятного времяпрепровождения. Вы сможете воспользоваться полным комплексом услуг. Все девушки отличаются привлекательной, обольстительной внешностью, которая приковывает внимание. Красавицы ждут встречи с вами и уже готовы принять во всеоружии. Расценки на услуги остаются на доступном уровне, чтобы вы могли подобрать вариант, исходя из финансовых предпочтений. Звоните прямо сейчас, чтобы ваш досуг был незабываемым!
1win_emaic · July 25, 2023 at 10:21 pm
ван вин промо
Oscarnup · July 25, 2023 at 10:53 pm
http://shop2.dlrudtn1.cafe24.com/member/login.html?returnUrl=https://killapods.eu/
ukhansauro · July 25, 2023 at 11:20 pm
На сайте https://omsksite.ru/ вы сможете ознакомиться с идеями для ремонта. Этот портал о ремонте, строительстве, отделочных материалах и многом другом, что поможет правильно организовать пространство. На этом сайте опубликованы ценные и важные рекомендации, которые помогут вам провести ремонт так, как требуется и в соответствии с требованиями безопасности. Ознакомьтесь с советами экспертов. Будут предложены самые разные инструкции, фотографии для наглядности. Именно поэтому вы без труда сориентируетесь в том, как выполнить ремонтные работы.
Oscarnup · July 25, 2023 at 11:52 pm
http://www.eaeunion.org/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/fi/product-category/nikotiinipussit/
vk1.at · July 26, 2023 at 12:50 am
Unquestionably believe that which you stated. Your favorite
justification appeared to be on the internet the simplest thing to be aware of.
I say to you, I definitely get irked while people
consider worries that they plainly do not know about.
You managed to hit the nail upon the top and also defined out the whole thing
without having side effect , people can take a signal. Will probably be back to get more.
Thanks
Oscarnup · July 26, 2023 at 12:51 am
https://forum.idws.id/proxy.php?link=https://killapods.eu/product-category/disposable-vapes/
yevgeved · July 26, 2023 at 1:33 am
На сайте https://vip-avto.com.ua/ вы найдете интересную, увлекательную информацию о транспорте, автомобилях, прокате авто. Есть раздел с основными материалами, которые читает большинство. Имеются интервью популярных личностей, а также их мнение на многочисленные вопросы. Вы получите только исчерпывающую, нужную информацию, которая необходима всем, кто желает больше знать о стране. Все материалы составлены экспертами в своем деле. И самое важное, что все новости любопытные и представлены на злободневные темы.
Oscarnup · July 26, 2023 at 1:44 am
https://mrc09.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/product-category/disposable-vapes/
Oscarnup · July 26, 2023 at 2:39 am
https://bloknot-krasnodar.ru/away.php?from=guide&url=http%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F&elementId=945713
Oscarnup · July 26, 2023 at 3:33 am
https://images.google.az/url?q=https%3A%2F%2Fkillapods.eu
스웨디시 감성마사지 · July 26, 2023 at 3:43 am
The diffuser and tthe oill stone also make it easy to mix diverse scents at house.
My blog post :: 스웨디시 감성마사지
Oscarnup · July 26, 2023 at 4:30 am
http://www.radwellonline.us.com/__media__/js/netsoltrademark.php?d=killapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
postnvaw · July 26, 2023 at 4:34 am
На сайте https://sexvsochi.com/ вы сможете подобрать девушку на свой вкус для проведения незабываемого досуга. Здесь только привлекательные, кокетливые и оригинальные дамы, которые точно вам понравятся своей харизмой, интересной внешностью. Они умеют себя преподать так, чтобы вы обратили на них внимание. Девушки ласковые, у них нежные руки, бархатная кожа и привлекательная внешность, спортивная фигура. Наберите номер прямо сейчас, чтобы классно провести время в кругу юных кокеток.
Oscarnup · July 26, 2023 at 5:24 am
https://pgdv.ru/out?url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
Oscarnup · July 26, 2023 at 6:19 am
http://clients1.google.com.pr/url?sa=i&url=https%3A%2F%2Fkillapods.eu
Oscarnup · July 26, 2023 at 8:09 am
https://school97.ru/bitrix/rk.php?goto=https://killapods.eu/product-category/disposable-vapes/
uvarogom · July 26, 2023 at 10:05 am
Полезная статья https://nedvij-ka.ru/novosti/priemka-kvartiry-v-novostrojke-chek-list.html о приемке квартиры в новостройке с чек-листом необходимых действий. Статья поможет вам провести тщательную проверку всех систем и элементов квартиры перед ее приобретением. Если вы обнаружите какие-либо дефекты или недостатки, вы будете знать что делать и куда обращаться.
BrucePlarp · July 26, 2023 at 10:06 am
Персональное решение отзывы о франшизе
https://www.sostav.ru/blogs2/260771/39462
Oscarnup · July 26, 2023 at 10:07 am
https://vladmama.ru/forum/go.php?https://killapods.eu/product-category/disposable-vapes/
Call Girls Service Bhopal · July 26, 2023 at 10:15 am
Hi to every body, it’s my first pay a quick visit of this web site; this blog contains awesome and in fact good material for readers.
GilbertExcum · July 26, 2023 at 10:25 am
https://saunaljux.ru/wp-content/pgs/vospolzuytes_nashim_spiskom_luchshih_biograficheskih_filmov.html
Michaelspoor · July 26, 2023 at 10:34 am
http://murano-club.biz/images/pages/smotret_luchshie_dokumentalnue_filmu_2023.html
Вебинары · July 26, 2023 at 10:40 am
[url=https://vebinary-s-polucheniem-sertifikata-besplatno.ru/]Бесплатные вебинары с получением сертификата[/url]
Бесплатные вебинары смогут красоваться шибко нужными для людишек, коие отыскивают работу, так как город предоставляют эвентуальность срубить утилитарные знания равным образом навыки для выполнения конкретных задач.
Бесплатные вебинары с получением сертификата
JamesTus · July 26, 2023 at 10:50 am
реферат по физкультуре колледж
JimmyTaura · July 26, 2023 at 11:01 am
помощь с диссертацией мгу
DavidDum · July 26, 2023 at 11:02 am
тестовая контрольная работа
Oscarnup · July 26, 2023 at 11:06 am
https://www.isna.ir/redirect/share/98061608384?url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
AdolphHax · July 26, 2023 at 11:23 am
https://sankt-peterburg.premier-centr.com/povyshenie-kvalifikaczii/socialnaya-rabota/oczenka-kachestva-uslug-soczialnogo-obsluzhivaniya/
southern motors acura · July 26, 2023 at 11:28 am
I conceive this internet site has very great indited subject material content.
Also visit my web page – southern motors acura
Us Immigration Lawyer Amsterdam · July 26, 2023 at 11:41 am
The judges deciding the case — Barack Obama appointee Michelle Friedland,
George W. Bush appointee Richard Clifton and Jimmy Carter appointee
William Canby Jr. — heard arguments from each sides of the lawsuit on Tuesday, February seventh.
The courtroom reside-streamed audio of the arguments on YouTube and at one
point, the video drew 100,000 listeners. Lawmakers on each sides of the aisle have made proposals to increase U.S.
As per U.S regulation, household immigration consists of two varieties; visas for fast
family and for family choice. In arguing for the release of Harry’s immigration file, the Heritage
Foundation stated there’s “widespread public and press curiosity” within the case.
In its response, the government stated that while there
“may be some public curiosity in the data sought,” it isn’t presently
convinced there is a compelling must launch
the records. Two branches of the DHS have previously declined to launch the prince’s immigration file without his
consent. Human rights lawyer Alison Battisson stated one in 10 immigration detainees
throughout Australia have been displaced people with out
citizenship of other countries. He’s a co-creator, with Henry
Kissinger and Daniel Huttenlocher, of The Age of AI: And Our Human Future.
“Sentimental trash masquerading as a human doc,” the brand new York
Occasions judged.
Вебинары · July 26, 2023 at 12:14 pm
[url=https://vebinary-s-polucheniem-sertifikata-besplatno.ru/]Бесплатные вебинары с получением сертификата[/url]
Бесплатные вебинары могут красоваться очень полезными для людей, кои отыскивают произведение, поскольку город предоставляют возможность выбить фактические ученость равным образом навыки чтобы исполнения точных задач.
Бесплатные вебинары с получением сертификата
ityusTHeni · July 26, 2023 at 12:53 pm
На сайте http://flashner.ru вы сможете приобрести внешние аккумуляторы, металлические, пластиковые флешки, а также выполненные из дерева. Обязательно изучите раздел «Топ продаж», в котором находятся самые популярные товары, которые являются выбором многих. К важным преимуществам покупки в этом магазине является то, что действует оперативная доставка, а вся продукция качественная, потому как контролируется на каждом этапе создания. Это сводит к нулю возможность появления брака.
Oscarnup · July 26, 2023 at 1:04 pm
http://alt1.toolbarqueries.google.com.vn/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
vavada_Gox · July 26, 2023 at 1:53 pm
промокод вавада
RufusLaf · July 26, 2023 at 2:00 pm
Услуги клининга
Oscarnup · July 26, 2023 at 2:03 pm
http://xtgem.com/u/mamri?redir=aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9uaWNvcG9kcy9wYWJsby1zbnVzLw&forum_id=oqp0yi6mk4estv1g3a90e41ut0cm6qo4iwxz1k3
DavidDum · July 26, 2023 at 2:13 pm
религиозная толерантность реферат
JamesTus · July 26, 2023 at 2:34 pm
подбор литературы
trix_rhymn · July 26, 2023 at 2:36 pm
https://trix-online-casino.com/
Oscarnup · July 26, 2023 at 3:01 pm
https://www.egovframe.go.kr/wiki/lib/exe/fetch.php?media=http%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
DavidDum · July 26, 2023 at 3:15 pm
курсовая работа физиотерапия в неврологии на заказ
RufusLaf · July 26, 2023 at 3:18 pm
Генеральная уборка офиса
DerekSon · July 26, 2023 at 3:28 pm
tadalafil for improved libido Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Oscarnup · July 26, 2023 at 3:58 pm
https://archiwum.edu.pl/dlibra/login?refUrl=aHR0cHM6Ly9raWxsYXBvZHMuZXUvZmkvcHJvZHVjdC1jYXRlZ29yeS9uaWtvdGlpbmlwdXNzaXQv
DavidDum · July 26, 2023 at 4:19 pm
купить вкр магистра
JamesTus · July 26, 2023 at 4:32 pm
дипломные работы москва
Oscarnup · July 26, 2023 at 4:55 pm
http://forum.zidoo.tv/proxy.php?link=https://killapods.eu/fi/product-category/nikotiinipussit/
Silasempixelm · July 26, 2023 at 5:15 pm
estatГsticas de pessoas que usam antidepressivos
DavidDum · July 26, 2023 at 5:23 pm
дипломная работа программа
Oscarnup · July 26, 2023 at 5:51 pm
http://www.shunyataresearch.cn.com/__media__/js/netsoltrademark.php?d=killapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
JamesTus · July 26, 2023 at 6:08 pm
отчет по практике деятельность
DavidDum · July 26, 2023 at 6:27 pm
онлайн помощь на экзамене
ndratedrore · July 26, 2023 at 6:40 pm
На сайте https://sparta-vt.ru/ вы сможете приобрести материалы для строительства, а также ремонта линий связи. Эта компания является официальным дистрибьютором, а потому реализуется исключительно качественный товар и по привлекательной цене, отсутствуют наценки. Специально для вас действует оперативная доставка по стране. Проработанная логистика позволяет доставить товары в минимальные сроки. Постоянные клиенты смогут рассчитывать на кредит. Продажа только качественных и проверенных материалов от лучших партнеров.
Party Escorts » Xlondon Escort Agency · July 26, 2023 at 6:45 pm
It’s actually a nice and useful piece of info. I am glad that you shared this useful info
with us. Please keep us up to date like this. Thank you for sharing.
Oscarnup · July 26, 2023 at 6:48 pm
https://clients1.google.so/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
FAJAHVI · July 26, 2023 at 7:03 pm
Great article.
JamesTus · July 26, 2023 at 7:24 pm
дипломная работа по металлургии
DavidDum · July 26, 2023 at 7:31 pm
курсовая работа антиинфляционная политика на заказ
Oscarnup · July 26, 2023 at 7:45 pm
https://httpshop.mledy.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
DavidDum · July 26, 2023 at 8:36 pm
квалификация по диплому где
Oscarnup · July 26, 2023 at 8:41 pm
http://wtsoc.h1n.ru/go/url=-aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9kaXNwb3NhYmxlLXZhcGVzLw
hapovGom · July 26, 2023 at 8:44 pm
On the page https://vk.com/promo_codes_aliexpress you can find promo codes for Aliexpress. Only valid promotional codes and coupons that are constantly updated and help you save a lot on purchases on the Aliexpress marketplace.
ubtsoLip · July 26, 2023 at 9:22 pm
На сайте https://novateplica.com.ua/ закажите качественные, надежные теплицы от производителя и по привлекательной цене. Они выполнены из надежных, качественных материалов, которые не ржавеют, им не страшно воздействие ультрафиолета. Компания находится на рынке более 28 лет, а потому выучила все предпочтения клиентов и их потребности, чтобы предложить лучшее. Закажите теплицу прямо сейчас! Если и вы обратитесь в эту компанию, то сможете рассчитывать на безупречное качество по лучшей цене.
Oscarnup · July 26, 2023 at 9:37 pm
http://sites.reformal.ru/external?url=https://killapods.eu/product-category/nicopods/pablo-snus/
DavidDum · July 26, 2023 at 9:37 pm
презентация powerpoint заказать
korovlit · July 26, 2023 at 9:56 pm
На сайте https://apps.apple.com/app/islandjet-cursed-chest/id6450366809 вы сможете насладиться интересной, увлекательной игрой IslandJet – Cursed Chest, которую можно скачать на iPhone либо iPad. В этой игре царит удивительная атмосфера, где вы окажетесь на необитаемом острове. Капитан спрятал сокровища, ценные вещи на этом удивительном острове. А вам предстоит найти все это, чтобы разбогатеть. Вас впечатлит четкая графика, безупречное качество звука. И самое главное, что игра затягивает с первых минут, а потому захочется дойти до самого финала.
JimmyTaura · July 26, 2023 at 10:19 pm
банковские рефераты
nefedNen · July 26, 2023 at 10:27 pm
99277 с текстом: На сайте https://hrustalev.com/catalog/ вы сможете ознакомиться с большим каталогом готовых сайтов для бизнеса, готовыми интернет магазинами, посадочными страницами, сайтами на 1С Битрикс. Готовый сайт – это быстрый старт, оптимально для SEO, техническая поддержка и главное доступная цена! Каталог готовых сайтов это новые и лучшие решения без разработки и ожидания разработки сайтов.
GilbertExcum · July 26, 2023 at 10:27 pm
https://www.fermerbezhlopot.ru/news/zahvatuvaushiy_mir_prikluchencheskogo_kino__otvaga__smekalka_i_neizvedannue_gorizontu.html
Oscarnup · July 26, 2023 at 10:33 pm
http://tarantula.pe.kr/bbs/skin/link/hit.php?sitelink=http%3a%2f%2fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F&id=link&page=2&sn1=&divpage=1&sn=off&ss=on&sc=on&select_arrange=hit&de
DavidDum · July 26, 2023 at 10:38 pm
курсовая работа естествознание на заказ
JimmyTaura · July 26, 2023 at 11:09 pm
рецензия на дипломную работу по юриспруденции
cipro 500 mg cost · July 26, 2023 at 11:23 pm
how to buy imitrex 100mg imitrex 25mg coupon order imitrex 100 mg
Oscarnup · July 26, 2023 at 11:29 pm
https://samara.profdst.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
stahlwandpool rund · July 26, 2023 at 11:34 pm
I’ve been browsing online more than 4 hours today,
yet I never found any interesting article like yours.
It’s pretty worth enough for me. Personally, if all webmasters and
bloggers made good content as you did, the web will be much
more useful than ever before.
DavidDum · July 26, 2023 at 11:40 pm
где заказать курсовую отзывы
JimmyTaura · July 26, 2023 at 11:58 pm
курсовая работа международный валютный фонд на заказ
Oscarnup · July 27, 2023 at 12:26 am
http://www.steinberghart.us.com/__media__/js/netsoltrademark.php?d=killapods.eu
DavidDum · July 27, 2023 at 12:41 am
решение задач по высшей математике в москве
JimmyTaura · July 27, 2023 at 12:47 am
диссертация по менеджменту
Oscarnup · July 27, 2023 at 1:22 am
https://hackerall.ucoz.ru/go?https://killapods.eu/fi/product-category/nikotiinipussit/
JimmyTaura · July 27, 2023 at 1:36 am
событийный туризм курсовая работа
DavidDum · July 27, 2023 at 1:44 am
курсовая работа на тему анализ производства
Oscarnup · July 27, 2023 at 2:14 am
https://taganrog.academica.ru/bitrix/rk.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
JimmyTaura · July 27, 2023 at 2:24 am
курсовая работа по инновационному маркетингу на заказ
kleaning_jef · July 27, 2023 at 2:43 am
Уборка магазинов
DavidDum · July 27, 2023 at 2:46 am
доклад на тему первые паровозы стефенсона и черепановых заказать
Oscarnup · July 27, 2023 at 3:07 am
http://myduc.edu.vn/index.php?language=vi&nv=news&nvvithemever=d&nv_redirect=aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9kaXNwb3NhYmxlLXZhcGVzLw
JimmyTaura · July 27, 2023 at 3:14 am
заказать курсовую работу недорого
lolita sex · July 27, 2023 at 3:21 am
What’s up to all, how is all, I think every one is getting
more from this web site, and your views are good for new users.
DavidDum · July 27, 2023 at 3:47 am
судебное право курсовая работа
Oscarnup · July 27, 2023 at 4:02 am
https://w-softner.blogsky.com/dailylink/?go=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F&id=1
JimmyTaura · July 27, 2023 at 4:06 am
эссе цена
DavidDum · July 27, 2023 at 4:49 am
курсовая работа по оснастке
Oscarnup · July 27, 2023 at 4:58 am
https://southklad.ru/forum/go.php?https://killapods.eu/product-category/disposable-vapes/
JimmyTaura · July 27, 2023 at 5:00 am
курсовая работа рудн
Jummagef · July 27, 2023 at 5:25 am
roxane gay essay on the help write my term paper securing the heavenly help – essay
DavidDum · July 27, 2023 at 5:51 am
заказать теоретическую часть диплома
JimmyTaura · July 27, 2023 at 5:54 am
контрольная работа по конституционному праву
Oscarnup · July 27, 2023 at 5:54 am
https://ilim.generation-startup.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
storis_rhymn · July 27, 2023 at 6:24 am
рандомайзер без регистрации инстаграм по комментариям https://storis-instagram-anonimno.ru
Oscarnup · July 27, 2023 at 6:47 am
https://toolbarqueries.google.com.tn/url?sa=t&url=http%3A%2F%2Fkillapods.eu
JimmyTaura · July 27, 2023 at 6:49 am
диплом по охране труда
DavidDum · July 27, 2023 at 6:54 am
презентация социальная философия
Oscarnup · July 27, 2023 at 7:39 am
https://www.deloras-sib.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
samolrak · July 27, 2023 at 7:48 am
На сайте https://buy-accs.ru/ можно приобрести купоны, почтовые ящики, а также социальные сети. Вас ожидают быстрые прокси с хорошим трастом. Они идеально подходят для авито, парсинга, выполнения самых разных задач. Специально для вас накрутка голосований высокого качества. Доступны клики по баннерам, рекламе, комфортная и функциональная панель управления. На этом сайте вы сможете приобрести аккаунты оптом. Необходимо проверять товар непосредственно после получения. Все аккаунты являются живыми.
loganville ford · July 27, 2023 at 7:48 am
I think the admin of this web site is in fact working hard in favor of his site, as here every stuff is quality based data.
Feel free to visit my homepage … loganville ford
DavidDum · July 27, 2023 at 7:57 am
курсовая работа управление ресурсами на заказ
JamesTus · July 27, 2023 at 8:11 am
работа репетитором по корейскому языку онлайн
Oscarnup · July 27, 2023 at 8:32 am
http://ecudemo73277.cafe24.com/member/login.html?noMemberOrder=&returnUrl=https%3a%2f%2fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
JamesTus · July 27, 2023 at 8:47 am
контрольная работа по аудиту для заочников
DavidDum · July 27, 2023 at 8:55 am
контрольные рефераты на заказ
Oscarnup · July 27, 2023 at 9:29 am
https://samara.defiletto.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
JamesTus · July 27, 2023 at 9:46 am
курсовая работа по бухгалтерскому учету
GilbertExcum · July 27, 2023 at 9:50 am
http://whitephotoschool.ru/feed/pgs/?nastupilo_interesnoe_vremya__rasslablyaemsya_s_komediyami_na_divane.html
lechkwrern · July 27, 2023 at 10:22 am
На сайте https://2ppc.ru/ вы сможете найти полезные онлайн инструменты для маркетинга и сайтов, такие как: настройка для robots.txt, настройка .htaccess, ЧПУ для ссылок, инструменты для обработки слов, образцы документов и многое другое, что поможет вам в повседневной работе с сайтами.
Oscarnup · July 27, 2023 at 10:25 am
http://o.nnov.org/common/redir.php?https://killapods.eu/fi/product-category/nikotiinipussit/
텐프로알바 · July 27, 2023 at 10:56 am
Meanwhile, Ms. Lee celebrated her 1st yeawr functioniung as a net developer for
Point Blank Creative in January.
Here is my homepage :: 텐프로알바
Oscarnup · July 27, 2023 at 11:22 am
https://clients1.google.pl/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
LarrySow · July 27, 2023 at 12:05 pm
https://kwork.ru/links/1017228/progon-khrumerom
Oscarnup · July 27, 2023 at 12:20 pm
http://29palms.ru/away.php?to=https://killapods.eu/fi/product-category/nikotiinipussit/
Entertainment News · July 27, 2023 at 12:24 pm
Hi there to every one, the contents present at this web page are truly remarkable for people knowledge, well, keep up the nice work fellows.
Oscarnup · July 27, 2023 at 1:17 pm
https://en.restoran.ru/bitrix/rk.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
JimmyTaura · July 27, 2023 at 1:30 pm
научная статья по генетике
Cat_Nuh · July 27, 2023 at 1:59 pm
Играю в Казино Кэт уже несколько месяцев, и оно меня не перестает радовать. Ассортимент игр широк, поддержка всегда помогает. 10/10! Больше на сайте https://cat-casino.uno/
накрутить просмотры яппи · July 27, 2023 at 2:08 pm
I know this if off topic but I’m looking into starting my own blog and was wondering what all is required to get set up? I’m assuming having a blog like yours would cost a pretty penny? I’m not very internet savvy so I’m not 100% sure. Any recommendations or advice would be greatly appreciated. Cheers
Oscarnup · July 27, 2023 at 2:13 pm
https://krasnoyarsk.dosug-gid.net/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
programma-teleperedach.ru · July 27, 2023 at 3:08 pm
Рекомендуем телепрограмма телепередач на сегодня [url=]https://www.programma-teleperedach.ru/[/url] по московскому времени.
Oscarnup · July 27, 2023 at 3:10 pm
https://shuya.websender.ru:443/redirect.php?url=http%3a%2f%2fkillapods.eu
JimmyTaura · July 27, 2023 at 3:13 pm
курсовая работа анализ бюджета предприятия на заказ
Michaelspoor · July 27, 2023 at 3:41 pm
https://gadanie.fun/pages/onlayn_anime__mir_beskonechnuh_vozmozghnoste.html
Oscarnup · July 27, 2023 at 4:07 pm
https://matras-vatniy.ru/links.php?go=https://killapods.eu/product-category/disposable-vapes/
обратная ссылка вк · July 27, 2023 at 4:19 pm
Статейное и ссылочное продвижение.
В наше время, фактически каждый человек пользуется
интернетом.
С его помощью возможно найти любую информацию из разных интернет-поисковых систем и
источников.
Для кого-то собственный сайт — это хобби.
Но, большая часть применяют
разработанные проекты для заработка и привлечение
прибыли.
У вас есть собственный сайт и вы хотите привлечь
на него максимум визитёров, но не
понимаете с чего начать? Обратитесь к нам!
Мы поможем!
обратная ссылка вк
LarrySow · July 27, 2023 at 4:35 pm
Заказать прогон хрумером
Oscarnup · July 27, 2023 at 5:03 pm
http://ww31.villedemontreal.qc.ca/__media__/js/netsoltrademark.php?d=killapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
homepage · July 27, 2023 at 5:22 pm
If you want to improve these casino bonuses, just fuhd
your axcount using Neosurf or Bitcoin for an further 20%.
Here is my page: homepage
Oscarnup · July 27, 2023 at 6:00 pm
http://nepalcricket.org.np/__media__/js/netsoltrademark.php?d=killapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
nomarSag · July 27, 2023 at 6:08 pm
На сайте https://www.nkdancestudio.ru/ запишитесь в школу танцев, где преподают высококлассные, компетентные специалисты. Они наделены огромным опытом, а потому знают, как развить гибкость, пластику и улучшить физическую форму. Кроме того, вы научитесь новым движениям, найдете единомышленников. Занятия проходят в удобное для вас время и по комфортному графику, а потому вам не нужно выискивать время в плотном графике. Вы разовьете свою сексуальность во время танцев на пилоне. Записывайтесь на занятия и начинайте новую жизнь.
Oscarnup · July 27, 2023 at 6:56 pm
https://odessa.prostitutki.today/bitrix/rk.php?goto=https://killapods.eu/product-category/disposable-vapes/
DerekSon · July 27, 2023 at 7:09 pm
tadalafil 20 mg Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
olkovNab · July 27, 2023 at 7:10 pm
На сайте https://vardek.plus/ вы сможете заказать уникальные и высокотехнологичные кухни «Вардек». Они простоят очень долго, радуя своим внешним видом, лаконичным дизайном. Есть возможность заказать мебель в самом разном дизайне, включая модерн, неоклассик. Бренд находится на рынке длительное время – более 20 лет. При желании вы сможете сделать покупку в рассрочку. На кухни дается гарантия в 24 месяца. Кухня будет создана за 21 день, а потому уже вскоре она будет установлена в помещении. Действуют привлекательные цены.
cleaning_jef · July 27, 2023 at 7:50 pm
клининговая компания в https://kliningovije-uslugi.ru/
Oscarnup · July 27, 2023 at 7:52 pm
https://www.space-travel.ru/links.php?go=https://killapods.eu/product-category/nicopods/pablo-snus/
shenfeoMeD · July 27, 2023 at 8:43 pm
На сайте https://go-ip.ru/ находятся более 250 000 хостов. Здесь вы сможете заказать клики по рекламе, баннерам, действия. Специально для вас комфортная панель управления, а также статистика управления. Все это и другое ожидает вас на этом сайте. Уникальностью портала является то, что он работает круглосуточно. Каждый пользователь получает возможность получить доступ к своей панели управления. На сервисе получится осуществить самые разные действия, включая переходы на сайт, клики, рейтинги.
Oscarnup · July 27, 2023 at 8:48 pm
https://toolbarqueries.google.co.tz/url?q=https://killapods.eu/product-category/disposable-vapes/
Lichathe · July 27, 2023 at 8:53 pm
cheap essay service i need someone to write my paper essay reading service uf
ayorovKnode · July 27, 2023 at 8:58 pm
На сайте https://gidro-kom.com/ вы сможете ознакомиться с огромным каталогом гидрооборудования и пневмооборудования по лучшим ценам в России. Купить с доставкой гидравлику, пневматику, смазочное оборудование очень легко. С доставкой по всей России. Все в наличии на складе. Официальный сайт поставщика гидрооборудования позволяет существенно сэкономить и получить большой ассортимент продукции в одном месте.
GilbertExcum · July 27, 2023 at 9:11 pm
https://steklo17.ru/inc/pags/svetochi_sovremennogo_kino__top_dramaticheskih_filmov_2023_goda.html
Oscarnup · July 27, 2023 at 9:43 pm
http://dog.s334.xrea.com/dti/?text=%E6%9C%89%E6%B5%A6%E7%95%99%E7%BE%8E&url=http%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F&pic=https%3A%2F%2Fwww.caribbeancompr.com%2Fmovie
eleznSmany · July 27, 2023 at 10:37 pm
Стоматология ОртоАрхитектор https://orthoarchitect.ru/ это современная стоматологическая клиника в Санкт-Петербурге, имеющая передовое оборудование и оказывающая полный перечень услуг от лечения зубов до протезирование и детской стоматологии. Высококвалифицированные врачи гарантия качества услуг. Мы предлагаем комфортную и уютную обстановку и удобное расположение стоматологии.
Oscarnup · July 27, 2023 at 10:39 pm
https://vse-generatori.ru/bitrix/rk.php?id=22&event1=banner&event2=click&event3=1%20/%20%5B22%5D%20%5BCATALOG%5D%20Demark&goto=https://killapods.eu/product-category/disposable-vapes/
Oscarnup · July 27, 2023 at 11:35 pm
https://clients1.google.ml/url?q=https://killapods.eu/product-category/disposable-vapes/
BitcVbvifinnagt · July 28, 2023 at 12:29 am
Быстро и удобно тут можно [url=https://skachat-minecraft.club/]скачать Майнкрафт[/url].
Oscarnup · July 28, 2023 at 12:32 am
https://kuz-fish.ru/go/url=https://killapods.eu/product-category/nicopods/pablo-snus
Oscarnup · July 28, 2023 at 1:28 am
https://maps.google.as/url?q=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F/
pick and pull st louis missouri · July 28, 2023 at 1:46 am
I believe this web site has got some really good info for everyone :D.
my website :: pick and pull st louis missouri
대환대출 · July 28, 2023 at 1:59 am
Commonly, you will make a deposit on the item you want to buy, which
acts as safety, & we then spread the rest
across 48 months.
Feel free to visit my web site: 대환대출
Oscarnup · July 28, 2023 at 2:25 am
https://www.topdoc.me/ads/www/delivery/ck.php?ct=1&oaparams=2__bannerid=22__zoneid=2__cb=0ab2681136__oadest=http%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
Oscarnup · July 28, 2023 at 3:22 am
http://backlink.scandwap.xtgem.com/?id=IRENON&url=killapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
buying a car from pull a part · July 28, 2023 at 3:25 am
Hello there, You’ve done a fantastic job. I’ll definitely
digg it and personally recommend to my friends. I’m confident they will be benefited
from this web site.
Feel free to surf to my web blog; buying a car from pull a part
auto parts inventory · July 28, 2023 at 3:36 am
Nice read, I just passed this onto a friend who was doing some research on that.
And he just bought me lunch since I found it for him smile Thus let me rephrase that: Thank you for lunch!
Also visit my webpage auto parts inventory
tveycBlozy · July 28, 2023 at 3:54 am
По ссылке https://play.google.com/store/apps/details?id=com.box.stars.app вы найдете уникальную и интересную игру Бравл Бокс Стар, которая представляет собой захватывающий симулятор. Суть в том, чтобы открывать самые разные боксы и прокачивать способности бойцов. Это удивительное приложение позволяет вам открыть огромное количество боксов для того, чтобы у вас были новые бойцы – они помогут в самых острых сражениях. Воспользуйтесь особой системой открывания ящиков. Тратьте монеты для того, чтобы улучшить показатели здоровья.
Oscarnup · July 28, 2023 at 4:16 am
https://planetasport.ru/bitrix/rk.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
premium · July 28, 2023 at 5:06 am
Thanks for finally writing about > Drone Hardware & programming –
Teqto System premium
bs2me.cc · July 28, 2023 at 5:08 am
What’s up, just wanted to mention, I enjoyed
this post. It was helpful. Keep on posting!
hyundai columbus ga · July 28, 2023 at 5:12 am
It’s fantastic that you are getting thoughts from this piece
of writing as well as from our argument made at this time.
Check out my blog post hyundai columbus ga
Oscarnup · July 28, 2023 at 5:13 am
http://www.hctraktor.ru/redirect.php?jump=killapods.eu
Oscarnup · July 28, 2023 at 6:06 am
https://volgograd.vzv.su/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
Michaelspoor · July 28, 2023 at 6:21 am
https://dolgo-zivi.ru/pag/pogruzghenie_v_atmosferu_dikogo_zapada.html
brovidcip · July 28, 2023 at 6:51 am
На сайте https://leitermos.ru/ вы сможете перевести документы любой сложности на самые разные языки. На это потребуется всего 4 часа. При этом будут даны гарантии точности. В этой компании вы сможете заказать перевод бизнес-документов, а также личных. В обязательном порядке соблюдается терминология, все нормы. Прямо сейчас вы сможете узнать стоимость своего перевода. В агентстве работают несколько сотен переводчиков. Ваши документы будут переведены максимально оперативно, точно в установленные сроки и по лучшей стоимости.
Michaelhes · July 28, 2023 at 6:58 am
poker dom
http://www.audipiter.ru/forum/user/31433-bkawy/
Кроме слотов на реальные деньги, на нашем сайте вы также найдете широкий выбор других увлекательных азартных игр. Вас ждут карточные игры, рулетка, покер и многое другое. Независимо от ваших предпочтений, у нас найдется что-то особенное для каждого игрока.Один из наших ключевых преимуществ – это наличие лицензионных автоматов. Это означает, что все наши игры созданы проверенными разработчиками, соблюдающими высочайшие стандарты качества и честности. Мы гарантируем честную игру, где каждый результат определяется случайным образом, а ваши выигрыши выплачиваются моментально без каких-либо задержек.
Oscarnup · July 28, 2023 at 7:01 am
https://apps2.poligran.edu.co/elearnpubl/bannergo.aspx?R=http%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
vgeniyben · July 28, 2023 at 7:06 am
На сайте https://aviator2023.su/ вы сможете сыграть в игру Aviator прямо сейчас. Это интересная игра, которая предлагает настоящие деньги. Это единственная игра, которая дает возможность увеличить ставку во много раз! Делая свои ставки, вы получите невероятные ощущения и драйв. Такой формат считается популярным из-за того, что дает возможность увеличить ставку в миллион раз! Эта игра затягивает с первых минут, а потому в нее захочется играть постоянно, чтобы сорвать куш. Попытайте удачу и вы, возможно, именно сегодня она окажется на вашей стороне.
fast cash-Generating strategies · July 28, 2023 at 7:10 am
Magnificent website. Ꭺ lօt of helpful іnformation һere.
I’m sending it to a few buddies ans additionally sharing in delicious.
And certainly, tһank yοu for your sweat!
Ꭺlso visit mу pagе; fast cash-Generating strategies
CraigTed · July 28, 2023 at 7:21 am
купить бетон
insta_viess · July 28, 2023 at 7:36 am
какие накрутить подписчиков в инстаграме https://nakrutka-podpischikov-instagram.ru
Oscarnup · July 28, 2023 at 7:54 am
http://www.rhino3d.com/go/seg?u=https%3A%2F%2Fkillapods.eu
agen slot 303 · July 28, 2023 at 7:58 am
Nice replies in return of this question with solid arguments and explaining the whole thing regarding that.
dryuszom · July 28, 2023 at 8:36 am
На сайте https://ai4.sale/ воспользуйтесь уникальным и высокотехнологичным помощником, который наделен искусственным интеллектом. Вы сможете создать привлекательный и интересный контент – он повысит продажи, конверсию. При помощи функционального устройства у вас получится повысить способности. Вы сможете повысить эффективность и прокачать свой контент. Воспользуйтесь необходимыми инструментами для создания бомбического материала. Для дополнения контента создавайте изображения.
Petertok · July 28, 2023 at 8:43 am
pokerdom скачать
покердом казино
PokerDom Казино ? это не просто место для азартных развлечений, это целый мир страсти и риска. Здесь каждый игрок сможет найти свой уникальный путь к успеху. Помните, что удача благоволит смелым, и если вы готовы рискнуть ради больших выигрышей, то PokerDom ? ваш идеальный выбор!PokerDom Casino ? это виртуальная платформа, где каждый азартный игрок найдет что-то особенное для себя. Независимо от вашего опыта в мире азартных игр, здесь вы сможете окунуться в уникальную атмосферу азарта и выигрывать крупные призы. Команда PokerDom неустанно работает над созданием самого захватывающего игрового контента, чтобы вы могли испытать настоящее удовольствие от игры.
GilbertExcum · July 28, 2023 at 8:44 am
https://nugabest.ru/news/semeynue_filmu__idealnoe_razvlechenie_dlya_vsey_semi.html
Oscarnup · July 28, 2023 at 8:47 am
https://maps.google.no/url?sa=t&url=https://killapods.eu/product-category/disposable-vapes/
Oscarnup · July 28, 2023 at 9:42 am
https://ipita.ru:443/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
goryaNig · July 28, 2023 at 10:05 am
Магазин Apples Kazakhstan https://www.apples.kz/ это вся линейка продукции Apple в Казахстане по самым выгодным ценам и всегда в наличии. Официальная и сертифицированная продукция Apple. Мы продаем iPhone, iPad, Macbook, Apple Watch, iMac и аксессуары к ним и имеем профессиональный сервис центр.
Oscarnup · July 28, 2023 at 10:37 am
https://forum.cmsheaven.org/proxy.php?link=https://killapods.eu/product-category/disposable-vapes/
Matthewerubs · July 28, 2023 at 10:59 am
pokerdom
https://krambride.at.ua/forum/7-1768-1
Один из особых козырей PokerDom Casino – это наше разнообразие. У нас каждый игрок найдет что-то по своему вкусу. Вас ждут классические фруктовые автоматы с символами удачи, тематические слоты с уникальными сюжетами, а также азартные игры, которые знакомы со всех уголков мира. Покорите просторы глобальной азии с нашими эксклюзивными играми!Играть в PokerDom Casino – это не только шанс на выигрыш, но и возможность окунуться в атмосферу настоящего азарта. Шуршание карт, щелчок рулетки, звон монет – все это звуки успеха, которые сопровождают вас в нашем казино. Почувствуйте адреналин, ощутите мощь удачи и окажитесь в мире, где всё возможно.
6fxm4onc55v66sgdcvy5wmsrqiaatluutjfzfxuvbxc6fce5ynm4mxad.onion · July 28, 2023 at 11:24 am
Heya i am for the first time here. I came across this board and I find It really
useful & it helped me out a lot. I hope to give something back
and help others like you helped me.
motozinjec · July 28, 2023 at 11:32 am
[url=https://motozinjec.dp.ua/v-kolpaki-na-koleso/]motozinjec.dp.ua/v-prokladki-kryshki-mosta/[/url]
Мото этношоп: запасные части чтобы мототехники да мотоэкипировки. Чемодан идеальный мотомагазин чтобы запчастей, аксессуаров и экипировки.
motozinjec.dp.ua/v-zaglushki-napravlyayushchey-tormoznykh-kolodok/
Oscarnup · July 28, 2023 at 11:34 am
https://toolbarqueries.google.com.sb/url?q=https://killapods.eu/product-category/disposable-vapes/
Oscarnup · July 28, 2023 at 12:31 pm
https://geo-complex.go64.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
Oscarnup · July 28, 2023 at 1:28 pm
https://elibrary.wayne.edu:443/webbridge~S47/showresource?resurl=http%3a%2f%2fkillapods.eu&linkid=42398576&noframe=1
Randalldaumn · July 28, 2023 at 1:41 pm
pokerdom мобильная версия
покердом
Не упустите шанс попробовать свою удачу в PokerDom Casino и окунуться в мир азарта и страсти. Скачайте клиент на ПК прямо сейчас и станьте частью нашего большого и дружелюбного сообщества азартных игроков. PokerDom Казино ждет вас!Будьте в центре событий игровой индустрии с PokerDom Casino! Мы всегда следим за новейшими тенденциями и обновлениями, чтобы предоставить вам самый захватывающий игровой опыт. Здесь вас ждут не только знаменитые титулы, но и малоизвестные, но ни с чем несравнимые слоты, которые удивят вас своими особенностями и призовыми функциями.
проверка обратных ссылок что это · July 28, 2023 at 1:46 pm
Статейное и ссылочное продвижение.
В наше время, практически каждый человек пользуется интернетом.
С его помощью возможно отыскать
любую данные из различных интернет-поисковых систем и источников.
Для кого-то личный сайт — это хобби.
Но, большая часть применяют созданные проекты для
заработка и привлечение прибыли.
У вас есть личный сайт и вы хотите привлечь на него максимум визитёров, но не
понимаете с чего начать? Обратитесь
к нам! Мы поможем!
проверка обратных ссылок что это
akeevalona · July 28, 2023 at 2:05 pm
На сайте https://apps.apple.com/ru/app/id6447760156 вы сможете сыграть в интересную и увлекательную игру Vavada: Lucky Train, которая подарит вам массу положительных впечатлений и ярких эмоций. Так вы сможете поучаствовать в удивительной гонке поездов. Выбирайте один из трех, затем приобретите билет и обгоните соперников. Вам необходимо оперативно нажать на светофор для того, чтобы выполнить все действия быстро. А если победите, то в этом случае выигрыш в несколько раз увеличится.
motozinjec · July 28, 2023 at 2:09 pm
[url=https://motozinjec.dp.ua/v-gayki-krepleniya-glushitelya/]motozinjec.dp.ua/v-remkomplekty-mosta/[/url]
Мото этношоп: запчасти для мототехники и мотоэкипировки. Чемодан идеальный мотомагазин чтобы запасных частей, аксессуаров да экипировки.
motozinjec.dp.ua/v-privody-takhometra/
Oscarnup · July 28, 2023 at 2:25 pm
https://auto.market.omk.ru/bitrix/redirect.php?goto=https://killapods.eu/
zyprexa prices · July 28, 2023 at 3:02 pm
hyzaar 12,5 mg without prescription hyzaar 12,5 mg prices buy hyzaar 12,5mg
Gambling site · July 28, 2023 at 3:16 pm
How about putting a wagdr from yoour favored stool at the neighborhood sports bar?
Here is my site Gambling site
Oscarnup · July 28, 2023 at 3:21 pm
http://www.sonel.ru/common/promo_redirect.php?cid=142&lid=1&v=0&ul=aHR0cHM6Ly9raWxsYXBvZHMuZXUvZmkvcHJvZHVjdC1jYXRlZ29yeS9uaWtvdGlpbmlwdXNzaXQv
Oscarnup · July 28, 2023 at 4:18 pm
http://www.corp.qsoft.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
PhillipGop · July 28, 2023 at 4:27 pm
сайт покердом
http://mittuu.jp/abc/gazou.cgi?getno=16299
Когда вы ищете увлекательные слоты, где удача и мастерство сходятся в ослепительной симфонии, PokerDom становится вашим лучшим спутником. Мы гордимся предоставлением самых популярных и лицензионных автоматов, которые привнесут в вашу жизнь волнение и адреналин. Здесь каждый гость находит что-то особенное, ведь ассортимент игр включает в себя как любимые классические слоты, так и редкие синонимы жанра, которые наверняка покорят ваше сердце.Один из особых козырей PokerDom Casino – это наше разнообразие. У нас каждый игрок найдет что-то по своему вкусу. Вас ждут классические фруктовые автоматы с символами удачи, тематические слоты с уникальными сюжетами, а также азартные игры, которые знакомы со всех уголков мира. Покорите просторы глобальной азии с нашими эксклюзивными играми!
programma-teleperedach.ru · July 28, 2023 at 4:53 pm
Программа ТВ телепрограмма на сегодня [url=]https://www.programma-teleperedach.ru/[/url] и телепрограмма на целый месяц.
스웨디시마사지 · July 28, 2023 at 5:11 pm
Furthermore, the Cannabis Unwind and Restore Massage are
also excellent for those who dreamm of physical and mental relaxation.
Here iss my web blog: 스웨디시마사지
Oscarnup · July 28, 2023 at 5:14 pm
https://7042.xg4ken.com/media/redir.php?prof=405&camp=4000&affcode=cr1772&k_inner_url_encoded=1&cid=687197489425&kdv=m&url%5B%5D=http%3a%2f%2fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
Jamesvem · July 28, 2023 at 5:18 pm
Payeer: мгновенное пополнение крипты.
накрутить просмотры яппи · July 28, 2023 at 5:47 pm
I do agree with all the ideas you have introduced for your post. They are very convincing and will definitely work. Still, the posts are too brief for novices. May just you please extend them a bit from next time? Thank you for the post.
Oscarnup · July 28, 2023 at 6:10 pm
http://shop1.pepem1.cafe24.com/member/login.html?returnUrl=http%3a%2f%2fkillapods.eu
buy Valium · July 28, 2023 at 6:28 pm
I visited several web sites but the audio quality for audio songs existing at this website is
in fact superb.
DavidDum · July 28, 2023 at 6:50 pm
курсовая работа договор личного страхования
Oscarnup · July 28, 2023 at 7:07 pm
https://library.kuzstu.ru/links.php?go=https://killapods.eu/fi/product-category/nikotiinipussit/
Michaelspoor · July 28, 2023 at 7:23 pm
https://patenty.ru/wp-content/pgs/trilleru__igra_na_grani_nervov.html
DavidDum · July 28, 2023 at 7:43 pm
выпускная квалификационная работа медицинский колледж
lyuyeerawn · July 28, 2023 at 7:51 pm
На сайте https://www.vdgb.ru/ вы сможете заказать 1С, который требуется для автоматизации бизнеса и по лучшей стоимости. Специалисты предприятия выполнят все работы «под ключ», внедрят готовые продукты, а также займутся созданием готовых решений, разработанных с использованием 1С. В течение 30 дней вы сможете пользоваться программами в облаке абсолютно бесплатно. Вы сможете воспользоваться профессиональными консультациями. При необходимости ваши сотрудники будут обучены всем правилам пользования.
Oscarnup · July 28, 2023 at 8:04 pm
https://www.db.lv/ext/https://killapods.eu/
DavidDum · July 28, 2023 at 8:34 pm
решение химии по фото
Oscarnup · July 28, 2023 at 9:01 pm
https://images.google.no/url?sa=t&source=web&rct=j&url=https://killapods.eu/product-category/nicopods/pablo-snus/
DavidDum · July 28, 2023 at 9:05 pm
написать реферат на заказ
DavidDum · July 28, 2023 at 9:47 pm
курсовая работа договор дарения на заказ
Oscarnup · July 28, 2023 at 9:57 pm
https://balashover.ru/ads/www/delivery/ck.php?ct=1&oaparams=2__bannerid=451__zoneid=23__cb=42282385cb__oadest=https://killapods.eu/product-category/disposable-vapes/
MIGATIO9 · July 28, 2023 at 10:20 pm
I absolutely love your blog.. Pleasant colors & theme.
Did you develop this amazing site yourself? Please reply back as I’m wanting to create my
own website and would love to know where you got this from or what the theme is called.
Appreciate it!
Oscarnup · July 28, 2023 at 10:54 pm
https://ihunter.ru:443/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/product-category/nicopods/pablo-snus/
JimmyTaura · July 28, 2023 at 11:04 pm
тестовая контрольная работа
BitcVavafinnagt · July 28, 2023 at 11:20 pm
Быстро и безопасно тут можно [url=https://skachat-minecraft.net/]скачать Майнкрафт[/url].
Oscarnup · July 28, 2023 at 11:51 pm
https://www.vl.ru/off/o/?utm_campaign=counters&utm_source=off&utm_medium=topbanner&comeback-title=100-%25D0%25BB%25D0%25B5%25D1%2582%25D0%25B8%25D1%258F%2520%25D0%2592%25D0%25BB%25D0%25B0%25D0%25B4%25D0%25B8%25D0%25B2%25D0%25BE%25D1%2581%25D1%2582%25D0%25BE%25D0%25BA%25D0%25B0%2520%25D0%25BF%25D1%2580-%25D0%25BA%25D1%2582%2520103%25D0%2591&comeback-url=https%3a%2f%2fkillapods.eu
vastySox · July 29, 2023 at 12:11 am
На сайте https://travelcast.fun/avatarki-dlya-nastoyashhih-ded-insajdov/ представлены аватарки в стиле «Дед Инсайд». Перед вами 150 лучших вариантов обоев на телефон, которые сделают ваш день более ярким, интересным и увлекательным. Здесь собраны лучшие обои на телефон, которые понравятся настоящим эстетам. Скачивайте к себе на мобильный и устанавливайте на рабочий стол. Для скачивания необходимо просто нажать на картинку, после чего сохранить фото. Эти обои можно использовать и как заставку на социальных сетях.
JimmyTaura · July 29, 2023 at 12:18 am
курсовая работа по педагогике дошкольного образования
mikhaAceri · July 29, 2023 at 12:37 am
На сайте https://tehnodacha.com/ вы можете ознакомиться с огромным ассортиментом садовой техники Stihl, а также с большим каталогом генераторов, электростанций, стабилизаторов напряжения, строительной техники, электропечей для сауны. На сайте есть раздел с распродажами, а наш сервисный центр Stihl Viking это гарантия качественного обслуживания техники.
Michaelspoor · July 29, 2023 at 12:38 am
https://poligon64.ru/images/art/?neveroyatnue_miru_kinofantastiki__unikalnost_zghanra_i_ego_prityagatelnost_1.html
Oscarnup · July 29, 2023 at 12:48 am
https://feeds.gty.org/~/t/0/0/gtyblog/~/https://killapods.eu/fi/product-category/nikotiinipussit/
oldyrmig · July 29, 2023 at 12:52 am
На сайте https://dosug76.info/ вы подберете для себя девушку для плотских утех. Она точно понравится вам своими сексуальными играми, привлекательной и роскошной внешностью, грациозными внешними данными. А самое главное, что дамы готовы исполнить любые ваши желания и доставить истинное наслаждение. Перед тем, как определиться с выбором, необходимо почитать информацию о дамах: вес, рост, а также цвет глаз и волос. Все девушки невероятно соблазнительные, раскрепощенные, поэтому точно вам понравятся. Вы захотите провести с дамой не один час.
JimmyTaura · July 29, 2023 at 1:32 am
заказать чертежи дома
slot online · July 29, 2023 at 1:33 am
Hello! I could have sworn I’ve been to this site before but after going through many of the posts I realized it’s new to
me. Regardless, I’m definitely pleased I discovered it and I’ll be bookmarking it and checking back often!
Oscarnup · July 29, 2023 at 1:44 am
https://top.gg/api/auctions/click?url=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F&campaign=43-0
tvprog_crelt · July 29, 2023 at 2:39 am
канал русский север программа на сегодня
Oscarnup · July 29, 2023 at 2:41 am
https://cse.google.mu/url?sa=t&url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
JimmyTaura · July 29, 2023 at 2:45 am
религиозная толерантность реферат
Oscarnup · July 29, 2023 at 3:38 am
https://images.google.com.tj/url?q=https://killapods.eu/
JimmyTaura · July 29, 2023 at 3:59 am
курсовая работа физическое воспитание детей на заказ
Oscarnup · July 29, 2023 at 4:33 am
http://clients1.google.ng/url?sa=t&url=http%3A%2F%2Fkillapods.eu
Pabloempixelm · July 29, 2023 at 4:35 am
Christen nehmen Antidepressiva
JimmyTaura · July 29, 2023 at 5:15 am
купить готовую курсовую работу
UK betting sites · July 29, 2023 at 5:16 am
Cryptocurrency payments tend to comne with the lowest
costs and quickest processing times.
Here is my blog: UK betting sites
Oscarnup · July 29, 2023 at 5:30 am
https://www.vesmirbooks.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
Ronaldclels · July 29, 2023 at 5:53 am
https://stihionline.ru/wp-content/pages/poligraficheskie_uslugi_v_tveri__kachestvo__nadezghnost_i_professionalizm.html
Michaelspoor · July 29, 2023 at 5:55 am
https://saunaljux.ru/wp-content/pgs/vospolzuytes_nashim_spiskom_luchshih_biograficheskih_filmov.html
adimirRap · July 29, 2023 at 6:13 am
На сайте https://vk.com/video3543697_456239276?list=1ee28bfa89cad6940b посмотрите гала-концерт, который дала популярная певица Анна Брусинская. Все песни в ее исполнении невероятно трепетные, красивые, дарят положительные эмоции, приятные впечатления. Песни лирические, патриотические и созданы в поддержку солдатам. В композициях скрывается вся боль русского народа. Этот концерт хочется пересматривать и наслаждаться харизмой певицы. Песни погружают в удивительную атмосферу и заставляют сопереживать.
JimmyTaura · July 29, 2023 at 6:22 am
дипломная работа разработка
Oscarnup · July 29, 2023 at 6:23 am
http://m.asdf.kohealthco.or.kr/member/login.html?noMemberOrder=&returnUrl=https%3a%2f%2fkillapods.eu
Stevenflulp · July 29, 2023 at 6:40 am
покердом казино
http://shqiperia.altervista.org/members/159079-Svenwek
Можно ли играть на PokerDom Casino с мобильного устройства? Конечно! Мы понимаем, насколько важно иметь доступ к увлекательным играм всегда и везде. Поэтому мы предлагаем удобное мобильное приложение, которое позволяет наслаждаться азартом на полную катушку прямо с вашего смартфона или планшета.Итак, приготовьтесь к захватывающему путешествию в мир азартных развлечений. Покорите слоты PokerDom Casino, скачайте клиент на ПК или играйте онлайн на мобильном – выбор за вами. Помните, что удача любит смелых, поэтому докажите, что вы – настоящий азартный путник, и пусть фортуна всегда будет на вашей стороне!
rogovanege · July 29, 2023 at 6:48 am
На сайте https://www.siteprav.ru/ вы сможете ознакомиться с конструктором сайтов Siteprav и самостоятельно создать сайт компании очень быстро и легко. Создание сайта с помощью конструктора не занимает много времени. Конструктор обладает огромным потенциалом. Ваш сайт будет отличаться в лучшую сторону от других. Также можно заказать услуги продвижения сайта, по позициям, по трафику, по лидам, а также продвижение лендингов. Продающий сайт для вашего бизнеса – это просто!
LesterSoolf · July 29, 2023 at 6:51 am
pokerdom отзывы
сайт покердом
Добро пожаловать в захватывающий мир азартных развлечений с PokerDom Casino ? самым оригинальным и захватывающим казино онлайн! Здесь каждый игрок найдет все, что нужно для незабываемого опыта и прибыльной игры на реальные деньги.Нет ничего более захватывающего, чем испытывать удачу в игровых автоматах на реальные деньги. С PokerDom Casino у вас будет шанс почувствовать адреналин и ощутить вкус победы. Мы подготовили для вас удивительные бонусы и акции, которые сделают вашу игру еще более увлекательной.
Ronaldclels · July 29, 2023 at 7:13 am
https://90-60-90.in.ua/content/articles/svadebnaya_poligrafiya__idealnoe_sochetanie_dizayna_i_dekora_dlya_vashego_osobogo_dnya_.html
Oscarnup · July 29, 2023 at 7:18 am
https://maps.google.com.br/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
JimmyTaura · July 29, 2023 at 7:53 am
онлайн помощь по высшей математике
Business Visa Online · July 29, 2023 at 7:58 am
I don’t know whether it’s just me or if perhaps everyone else encountering problems with your website.
It appears as if some of the text on your posts are running off
the screen. Can someone else please comment and let me know if
this is happening to them as well? This might be a issue with my
web browser because I’ve had this happen before. Cheers
Oscarnup · July 29, 2023 at 8:13 am
https://jp.paltalk.com/client/webapp/client/External.wmt?url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
Stevenflulp · July 29, 2023 at 8:30 am
покердом
http://www.plazuelasdesandiego.com/component/k2/item/12?start=18280
С нами игра становится настоящим приключением. Вы переноситесь в мир азартных возможностей и неизведанных горизонтов. И только у нас вы найдете PokerDom Casino ? воплощение страсти и вдохновения.Покердом Казино – это не просто игра, это стиль жизни, которым делятся тысячи игроков по всему миру. Все они объединены общим стремлением к победе, азарту и радости от игры. Вы готовы присоединиться к этой удивительной азартной семье?
Ronaldclels · July 29, 2023 at 8:33 am
https://nurtim.kz/wp-content/art/odnim_iz_samuh_effektivnuh_sposobov_prezentacii_informacii__yavlyaetsya_sozdanie_prezentacii_na_temu_po.html
LesterSoolf · July 29, 2023 at 8:51 am
скачать покердом на андроид с официального
сайт покердом
Не упустите шанс сделать свою жизнь ярче и насыщеннее. Покажите свое мастерство и удачу вместе с PokerDom Casino. Наше казино ? это воплощение всех ваших азартных фантазий.PokerDom Casino ? это место, где страсть к азарту и волнение сливаются в единую гармонию. Мы предлагаем лучший выбор лицензионных автоматов, которые перенесут вас в мир невероятных приключений. У нас нет равных, когда речь идет о разнообразии игр и качестве обслуживания.
Oscarnup · July 29, 2023 at 9:03 am
https://vira-mebel.ru/redirection?url=https://killapods.eu/product-category/disposable-vapes/
izarovdioke · July 29, 2023 at 9:31 am
На сайте https://xn—43-5cd0a1ac4b9ah5b.xn--p1ai/ вы сможете заказать мебель самого разного типа: тумбы, комоды, в детскую, на кухню. Для всех покупателей замер абсолютно бесплатно. Также вы можете присмотреть прихожую, шкафы-купе и многое другое. Вся продукция создается из качественных, надежных и проверенных материалов, которые не утратят своего внешнего вида. Регулярно появляются новые коллекции, которые отлично впишутся в вашу концепцию помещения. Также на сайте вы узнаете о том, как сделать заказ, новости компании.
Ronaldclels · July 29, 2023 at 9:52 am
https://bakemeshop.ru/image/pages/index.php?poligrafiya_nakleyki__sovremennoe_reshenie_dlya_effektivnogo_brendinga.html
Oscarnup · July 29, 2023 at 9:59 am
https://www.websib.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
Lazarotex · July 29, 2023 at 10:16 am
покердом казино
https://kanalizacijas.lv/component/k2/item/9-learn-from-the-past?start=9920
Итак, если вы ищете надежное и интересное казино для игры в слоты на реальные деньги, PokerDom Casino – ваш идеальный выбор. Здесь каждый игрок найдет свое счастье, волнение и возможность испытать удачу на прочность. Не упустите шанс стать частью нашей большой азартной семьи!В PokerDom Casino каждый момент наполнен неожиданностью и радостью. Мы открыты для всех, кто стремится к незабываемым приключениям. Доверьтесь нам, и вы обязательно почувствуете вкус азарта, который заставит ваше сердце биться чаще. Не упустите шанс стать частью нашего большого и дружного сообщества.
datuk 168 · July 29, 2023 at 10:43 am
I visited multiple sites but the audio feature for audio songs current at this website is genuinely marvelous.
Oscarnup · July 29, 2023 at 10:54 am
https://bjdclub.ru/out.phtml?https://killapods.eu/product-category/nicopods/pablo-snus/
lakewood mazda · July 29, 2023 at 11:06 am
You can certainly see your skills within the work you write.
The sector hopes for more passionate writers like you who aren’t afraid to say
how they believe. Always follow your heart.
My blog post lakewood mazda
Michaelspoor · July 29, 2023 at 11:10 am
https://www.fermerbezhlopot.ru/news/zahvatuvaushiy_mir_prikluchencheskogo_kino__otvaga__smekalka_i_neizvedannue_gorizontu.html
Ronaldclels · July 29, 2023 at 11:11 am
https://cupofig.ru/logs/pgs/kupit_diplom_v_kazani_4.html
Oscarnup · July 29, 2023 at 11:51 am
http://w6fhy.3nx.ru/loc.php?url=https://killapods.eu/product-category/nicopods/pablo-snus/
udryavchoop · July 29, 2023 at 12:08 pm
Сайт Гарант СЭС https://garant-ses.ru/ это – официальная санэпидемстанция в Санкт-Петербурге для жилых, коммерческих, административных и промышленных помещений – проводим дезинсекцию, дезинфекцию и дератизацию, уничтожение вредителей. Станция Гарант СЭС имеет официальную аттестацию СанПиНа, все используемые препараты — сертифицированы и соответствуют нормам Роспотребнадзора.
233Ven · July 29, 2023 at 12:12 pm
сайт покердом
Ronaldclels · July 29, 2023 at 12:29 pm
https://vin-diesel.ru/include/pages/kupit_diplom_medsestru_1.html
JimmyTaura · July 29, 2023 at 12:45 pm
реферат первая медицинская помощь
Oscarnup · July 29, 2023 at 12:48 pm
https://rahvar110.blogsky.com/dailylink/?go=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F&id=2
徳島県小松島市 腹痩せ · July 29, 2023 at 1:11 pm
hello!,I love your writing very so much! percentage we be in contact extra
about your article on AOL? I need an expert in this space to
resolve my problem. Maybe that’s you! Taking a look forward
to peer you.
как получать обратные ссылки · July 29, 2023 at 1:35 pm
Статейное и ссылочное продвижение.
В наши дни, фактически каждый человек пользуется интернетом.
С его помощью можно отыскать любую данные из различных интернет-поисковых систем и источников.
Для кого-то собственный сайт —
это хобби. Но, большинство применяют созданные проекты для заработка и привлечение прибыли.
У вас есть личный сайт и вы желаете привлечь на него
максимум посетителей, но не знаете
с чего начать? Обратитесь к нам!
Мы поможем!
как получать обратные ссылки
Oscarnup · July 29, 2023 at 1:45 pm
https://medchirurgia.campusnet.unito.it/do/home.pl/LoginForm?referer=https://killapods.eu/
stanislbib · July 29, 2023 at 1:46 pm
На сайте https://intim31.com/ вы сможете подыскать для себя привлекательную барышню, которая обрадует своими ласками, точеной фигурой, грациозными формами. Если и вы хотите интересно и необычно провести время среди красавиц, то скорее заходите на этот сайт, чтобы выбрать девушку в соответствии со своими пожеланиями и финансовыми возможностями. Можно выбрать самых разных девушек: рыженьких, блондинок, стройных или пухлых. Но в любом случае вас обрадует безупречный уровень сервиса.
Ronaldclels · July 29, 2023 at 1:47 pm
https://talisman-rostov.ru/wp-content/pgs/kupit_diplom_o_vusshem_obrazovanii_v_moskve_8.html
Oscarnup · July 29, 2023 at 2:42 pm
https://ochki-vsem.ru:443/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/
Ronaldclels · July 29, 2023 at 3:06 pm
https://stroykrovexpert.ru/images/pgs/?kupit_diplom_urista_2.html
DonnieDar · July 29, 2023 at 3:08 pm
покердом скачать на андроид бесплатно с официального
https://neprussia.ru
И не забывайте, у нас есть привлекательные бонусы и акции для новых игроков и постоянных посетителей! Подарки, фриспины, дополнительные вознаграждения – все это ждет вас на нашем сайте. Ваша удача никогда не была столь щедро вознаграждена!Как начать? Очень просто! Просто скачайте клиент PokerDom на свой ПК и окажетесь на пороге к путешествию в захватывающий мир азартных развлечений. Кстати, наш клиент полностью лицензирован и соответствует всем высочайшим стандартам безопасности. Это означает, что вы можете наслаждаться игрой с абсолютной уверенностью в честности и надежности.
Oscarnup · July 29, 2023 at 3:39 pm
https://maps.google.pt/url?sa=t&rct=j&url=https://killapods.eu/fi/product-category/nikotiinipussit/
kykyryzo_rhymn · July 29, 2023 at 4:09 pm
https://kykyryzo.ru/
Michaelspoor · July 29, 2023 at 4:20 pm
https://dzedzich.org/kurs/wp-pages/?onlayn_anime_dlya_semi.html
Ronaldclels · July 29, 2023 at 4:26 pm
https://vn44.ru/js/pgs/kupit_diplom_v_magnitogorske_1.html
Oscarnup · July 29, 2023 at 4:36 pm
https://www.alibra.ru/bitrix/redirect.php?goto=https://killapods.eu/
humaktusia · July 29, 2023 at 4:40 pm
На сайте https://numerolog56.ru/ представлена информация о нумерологии. Есть публикации на тему здоровья, любопытных данных, а также денег, кармы, предназначения, совместимости. Если вы ищите какую-то определенную тему, то воспользуйтесь специальным фильтром. Специально для вас составлен прогноз на год. Есть статьи на тему того, о чем мы думаем и как материализовать свои позитивные мысли. Имеются публикации о том, как числа влияют на профессию. Кроме того, вы найдете информацию о том, как правильно выбрать имя.
Timothyquila · July 29, 2023 at 4:52 pm
покердом клиент на андроид
http://www.samaramed.ru/forum/health/topic_32510.html
Скачайте наше приложение на ПК и окунитесь в увлекательный мир азарта уже сегодня. Наше казино открыто для всех, кто жаждет испытать настоящее азартное веселье и приятное времяпровождение. ПокерДом Казино рад приветствовать вас в числе своих постоянных клиентов.Когда вы присоединяетесь к нам, вы вступаете в оживленное сообщество любителей азарта со всего мира. Наши турниры и розыгрыши призов станут вашим шансом почувствовать волнение битвы и вкус сладкой победы. ПокерДом Казино предоставляет уникальные бонусы и акции, которые заставят ваше сердце биться чаще. Здесь каждый игрок – ценный гость, и мы заботимся о вашем удовольствии.
DonnieDar · July 29, 2023 at 5:12 pm
pokerdom отзывы
https://neprussia.ru
Как начать? Очень просто! Просто скачайте клиент PokerDom на свой ПК и окажетесь на пороге к путешествию в захватывающий мир азартных развлечений. Кстати, наш клиент полностью лицензирован и соответствует всем высочайшим стандартам безопасности. Это означает, что вы можете наслаждаться игрой с абсолютной уверенностью в честности и надежности.Добро пожаловать в захватывающий мир азартных развлечений – PokerDom Казино! Этот онлайн гемблинг-космос является официальным сайтом, где каждый азартный любитель сможет насладиться захватывающими слотами на реальные деньги, а также погрузиться в мир азартных ставок на покер и многое другое. Мы не просто казино, мы – врата в мир удачи, где каждый желающий может испытать адреналин и заработать реальные деньги!
Oscarnup · July 29, 2023 at 5:33 pm
https://www.7ya.ru/click/?url=https://killapods.eu/
genadvax · July 29, 2023 at 5:40 pm
На сайте https://ruchkin.ru вы сможете заказать авторучки, а также сувенирные ручки с логотипом. Компания уже более 10 лет оказывает услуги в данной сфере, заботится о качестве продукции, а также регулярно улучшает клиентский сервис, работает на результат. Среди основных заказчиков – это зарубежные, отечественные компании, заинтересованные в получении качественных и профессиональных услуг. Производство укомплектовано высокотехнологичным оборудованием, которое позволяет создавать товары в любом количестве.
Ronaldclels · July 29, 2023 at 5:45 pm
http://mennames.ru/wp-content/pages/index.php?kupit_diplom_v_kemerovo_1.html
Oscarnup · July 29, 2023 at 6:30 pm
http://plus.url.google.com/url?sa=z&n=x&url=https://killapods.eu/product-category/disposable-vapes/
Timothyquila · July 29, 2023 at 6:37 pm
покердом на андроид
http://www.fcdnipro.ua/ua/user/69623/
ПокерДом Казино — ваш путь к захватывающему миру азарта и возможностей! Если вы ищете официальный сайт для игры в онлайн-слоты на реальные деньги, ваше путешествие заканчивается здесь. Добро пожаловать на PokerDom Casino, место, где мечты о выигрыше становятся яркой реальностью.Играйте с нами, и вы обнаружите мир увлекательных игр и бесконечных возможностей для успеха и развлечений. Наше казино — это воплощение качества и надежности, подтвержденное долгим опытом работы и множеством довольных клиентов. PokerDom Casino дарит вам шанс испытать острые ощущения победы, превращая желания в яркую реальность.
https://thaitaan.com/ · July 29, 2023 at 6:40 pm
If you want to take a great deal from this piece of writing
then you have to apply these techniques to your won weblog.
kraud_jef · July 29, 2023 at 7:00 pm
продвижение сайта в топ https://servis-kraud-internet-marketinga.ru
Oscarnup · July 29, 2023 at 7:27 pm
https://www.sgmonolit.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Oscarnup · July 29, 2023 at 8:23 pm
http://www.must.or.kr/ko/must/ci/?link=https://killapods.eu/
Gabrieljency · July 29, 2023 at 8:56 pm
http://communitystalkers.80lvl.ru/viewtopic.php?f=12&t=1567
Michaelidons · July 29, 2023 at 9:00 pm
http://anatoliyrud.ekafe.ru/viewtopic.php?f=29&t=1604
poker3Ven · July 29, 2023 at 9:29 pm
покердом зеркало вход
Michaelspoor · July 29, 2023 at 9:31 pm
https://ergoteks.ru/mg-core/pgs/multfilmu_kak_zghanr_kino.html
Gabrieljency · July 29, 2023 at 10:03 pm
http://forum.persona-clinic.kz/viewtopic.php?f=24&t=993
Michaelidons · July 29, 2023 at 10:18 pm
http://pnevmokzn.80lvl.ru/viewtopic.php?f=8&t=346
ananetal · July 29, 2023 at 10:50 pm
Forex broker https://xn--mgbug7c05a.net/ in Iran is a well-established financial trading service, having been in operation for over 15 years. This broker provides a secure platform for trading foreign currencies, allowing clients to deposit and withdraw funds seamlessly within Iran. One of its key features is its commitment to client privacy and security. It offers maximum anonymity, ensuring that client data and transactions are protected at all times. This long-standing experience and commitment to client safety make it a trusted choice for Forex trading in Iran.
Gabrieljency · July 29, 2023 at 11:11 pm
https://forum.stde.ru/index.php?/gallery/image/182-%D0%BA%D1%83%D0%BF%D0%B8%D0%BB%D0%B0-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC-%D0%BE-%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8-%D0%BA%D0%B0%D0%BC%D0%B5%D0%BD%D1%8C-%D0%BD%D0%B0-%D0%BE%D0%B1%D0%B8/
BitcVarafinnagt · July 29, 2023 at 11:16 pm
Надежно и безопасно тут можно [url=https://skachat-minecraft.online/]скачать Майнкрафт[/url].
Robert#snuserandom[Ihoqebuqeqoprywu,2,5] · July 29, 2023 at 11:20 pm
Discover the world of [url=https://nicotine-pouches.store/gb/strong-nicotine-pouches-uk/]strong nicotine pouches uk[/url] with our diverse range of flavors and robust strength!
Michaelidons · July 29, 2023 at 11:35 pm
http://rolevikionline.g-talk.ru/viewtopic.php?f=21&t=1614
ws2816 led · July 29, 2023 at 11:36 pm
Good post. I will be going through a few of these issues as well..
Gabrieljency · July 30, 2023 at 12:18 am
http://www.bakinsky-dvorik.ru/club/user/127071/blog/3203/
David#pouchgen[Izumozefokoly,2,5] · July 30, 2023 at 12:49 am
Discover the world of [url=https://killa.website/]nicotine pouches[/url] with our diverse range of flavors and robust strength!
Michaelidons · July 30, 2023 at 12:54 am
https://club.outdoorcenter.kz/index.php?/gallery/image/220-nastoyaschie-diplomy-o-nachalnom-obrazovanii-ust-avam/
Gabrieljency · July 30, 2023 at 1:28 am
http://o97765bq.beget.tech/2023/07/26/kupili-diplomy-o-nachalnom-obrazovanii-nizhniy-tagil.html
arasoElefs · July 30, 2023 at 2:13 am
На сайте https://intimpitera.com вы подберете для себя девушку для отличного времяпрепровождения. Перед вами только привлекательные, красивые, нежные и заводные девушки, которые знают, как доставить наслаждение и подарить внимание. Каждая девушка поможет получить незабываемый восторг, радость от нахождения с ней. И самое важное, что вы на некоторое время станете ее объектом обожания, чтобы вы решили воспользоваться ее услугами еще не раз. Все девушки опрятные, красивые, привлекательно выглядят.
Michaelidons · July 30, 2023 at 2:14 am
https://bitrix.individ.ru/club/user/102/blog/61/
Gabrieljency · July 30, 2023 at 2:35 am
https://hrv-club.ru/forums/index.php?autocom=gallery&req=si&img=4575
Michaelspoor · July 30, 2023 at 2:39 am
https://forwardprint.com.ua/image/pgs/zakon_i_poryadok__otrazghenie_proshlogo_v_kriminalnom_kino.html
martynVog · July 30, 2023 at 3:06 am
На сайте https://sdampodkluch.ru/ представлена содержательная, интересная информация о ремонте. Есть любопытные и интересные данные на тему того, как правильно обустроить кабинет, продумать дизайн освещения. Опубликованы данные на тему коммунальных, жилищных услуг. Вы узнаете о том, чем лучше всего отделать фасад, чтобы он смотрелся привлекательно и не разрушился под влиянием грибка, плесени. Есть статьи про необычные полы, а также подвесные потолки. Все статьи содержательные, интересные и ответят на многочисленные вопросы.
under 18 years porno · July 30, 2023 at 3:09 am
Inspiring story there. What occurred after? Good luck!
WillieUnada · July 30, 2023 at 3:20 am
покердом регистрация
сайт покердом
PokerDom Casino ? это безусловный лидер среди онлайн-казино, где вас ждут море увлекательных развлечений и впечатляющие возможности для заработка реальных денег. Откройте для себя мир виртуальных слотов, в котором каждый спин может стать шагом к заветному джекпоту. А с лицензионными автоматами, предоставленными лучшими разработчиками, ваш опыт будет насыщенным и неповторимым.PokerDom Casino позаботилось о своих игроках и предлагает разнообразные способы пополнения счета и вывода выигрышей. Мы ценим ваше время и стремимся обеспечить быстрые и безопасные транзакции. Ведь ваше удовольствие и уверенность в честности игры для нас превыше всего.
RalphEDIND · July 30, 2023 at 3:21 am
pokerdom
http://atachin.es/index.php/component/k2/item/8?start=19130
Один из замечательных аспектов PokerDom Казино – это возможность скачать специальный клиент на ПК. Это обеспечит вас стабильным и плавным игровым процессом, а также даст доступ к дополнительным возможностям и акциям. Клиент на ПК – это, безусловно, великолепный выбор для тех, кто ценит качество и комфорт.Приготовьтесь к захватывающему путешествию в удивительный мир азартных развлечений, ведь PokerDom Casino – это виртуальный рай для любителей азарта и страстных поклонников казино онлайн. На сайте PokerDom Казино вы сможете окунуться в мир бесконечных возможностей, испытать удачу на собственном опыте и, возможно, стать обладателем крупного денежного приза.
Michaelidons · July 30, 2023 at 3:32 am
https://stalinarch.ru/wiki/index.php/%D0%9E%D1%80%D0%B8%D0%B3%D0%B8%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC_%D0%BE_%D1%81%D1%80%D0%B5%D0%B4%D0%BD%D0%B5%D0%BC_%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8_%D0%A3%D0%B2%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B9
인천 스웨디시 · July 30, 2023 at 3:50 am
In reality, it caan really have a stimulant effect in some people.
Also visit my page ::인천 스웨디시
yuchkcab · July 30, 2023 at 3:55 am
На сайте https://klub-drug.ru/kak-v-stomatologii-razvodjat-na-dengi/ вы сможете почерпнуть информацию о том, как разводят на деньги в стоматологии, начиная от необходимости дополнительных услуг, заканчивая различным сокрытием информации. Интересная статья позволит вам ознакомиться со всеми пунктами разводов в стоматологии и не попасться на удочку недобросовестных стоматологов.
Ernasttap · July 30, 2023 at 4:48 am
You said it adequately.!
best resume writing service 2020 [url=https://essayservicehelp.com/]term paper writing service[/url] best paper writing services
Michaelidons · July 30, 2023 at 4:53 am
https://wiki.diamondrp.ru/index.php?title=%D0%91%D0%BB%D0%B0%D0%BD%D0%BA_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D0%B0_%D0%BE_%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC_%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8_%D0%9A%D0%BE%D0%BC%D1%81%D0%BE%D0%BC%D0%BE%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B9
RalphEDIND · July 30, 2023 at 5:09 am
покердом казино
https://www.reakk.com/archives/40.html/comment-page-339
Покердом Казино – это не просто игра, это стиль жизни, которым делятся тысячи игроков по всему миру. Все они объединены общим стремлением к победе, азарту и радости от игры. Вы готовы присоединиться к этой удивительной азартной семье?Для тех, кто предпочитает более мобильный опыт, PokerDom предлагает возможность играть онлайн, без необходимости скачивать дополнительное программное обеспечение. Наш сайт адаптирован для мобильных устройств, что позволяет наслаждаться азартом в любом месте и в любое время.
GeorgeEluts · July 30, 2023 at 5:18 am
На сайте https://igry-na-ulice.ru/ ознакомьтесь с интересными и увлекательными играми для детей на открытом воздухе. Они разовьют коммуникативные навыки, позволят сформировать правильную осанку, улучшат физическую форму и просто доставят радость. Перед вами список тех игр, которые идеально подходят как для мальчишек, так и девчонок, любящих активно двигаться. Большой выбор игр позволит найти тот вариант, который подходит ребенку больше всего. Игры могут быть не только подвижными и приносить радость, но и полезными для здоровья.
WillieUnada · July 30, 2023 at 5:30 am
покердом скачать на андроид бесплатно
https://tyr54.ru
PokerDom Casino ? это безусловный лидер среди онлайн-казино, где вас ждут море увлекательных развлечений и впечатляющие возможности для заработка реальных денег. Откройте для себя мир виртуальных слотов, в котором каждый спин может стать шагом к заветному джекпоту. А с лицензионными автоматами, предоставленными лучшими разработчиками, ваш опыт будет насыщенным и неповторимым.Покердом Казино рад приветствовать новичков и готов порадовать постоянных игроков щедрыми бонусами и акциями. Почувствуйте себя ценным участником клуба и наслаждайтесь вниманием наших профессиональных менеджеров поддержки. Мы здесь, чтобы сделать ваше времяпровождение незабываемым.
Michaelidons · July 30, 2023 at 6:14 am
https://wiki.3cdr.ru/wiki/index.php/%D0%9E%D1%80%D0%B8%D0%B3%D0%B8%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC_%D0%BE_%D1%81%D1%80%D0%B5%D0%B4%D0%BD%D0%B5%D0%BC_%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8_%D0%A2%D1%8F%D0%B6%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D0%B9
Michaelidons · July 30, 2023 at 7:35 am
http://c90226sl.beget.tech/2023/07/26/originalnyj-diplom-o-srednem-obrazovanii-turukhansk/
Oscarnup · July 30, 2023 at 8:16 am
https://asu.tusur.ru/bitrix/rk.php?goto=https://killapods.eu/
Michaelidons · July 30, 2023 at 8:56 am
https://clubteramont.ru/forum/gallery/image/31-%D0%B1%D0%BB%D0%B0%D0%BD%D0%BA-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D0%B0-%D0%BE-%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8-%D1%81%D0%B5%D1%80%D0%B3%D0%B8%D0%B5%D0%B2-%D0%BF%D0%BE%D1%81%D0%B0%D0%B4/
RalphEDIND · July 30, 2023 at 8:59 am
pokerdom
https://yablor.ru/blogs/hobbit-i-starost-v-nashey-strane/2804137
Когда речь заходит о качественной игровой платформе с безупречной репутацией, PokerDom Casino всегда находится в топе. Насладиться увлекательными азартными приключениями и попробовать свою удачу в наших лицензионных автоматах – легко и просто. Вам нужно всего лишь скачать клиент на ПК и создать аккаунт, и волшебный мир азартных игр раскроется перед вами.Покер, блэкджек, рулетка, слоты — вам предоставляется свобода выбора, чтобы окунуться в мир самых разнообразных азартных развлечений. На PokerDom Casino каждый найдет что-то по душе. От новичков до ветеранов азартных баталий — у нас есть место для каждого.
Richardjoync · July 30, 2023 at 9:03 am
покер дом отзывы
покердом
Каждый посетитель официального сайта PokerDom оценит его простоту использования и интуитивный интерфейс. Здесь вы найдете все необходимое для плавного и безупречного игрового процесса. Скачать клиент на ПК – это первый шаг к захватывающему путешествию по миру азарта и возможностей.Надежность и безопасность – вот главные принципы PokerDom Казино. Вы можете быть уверены, что ваша конфиденциальность и финансовые данные находятся под надежной защитой. PokerDom Casino предоставляет полную поддержку и помощь своим игрокам, чтобы ваше время в казино было максимально комфортным и приятным.
Oscarnup · July 30, 2023 at 9:22 am
https://www.google.me/url?sa=t&url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
alkinFag · July 30, 2023 at 9:32 am
Гостевой дом в Ленинградской https://xn--80akeslcku6g.xn--p1ai/ это уголок гостеприимства и просторные, безупречно чистые номера от уютного эконом класса, до люксовых вариантов. В каждом номере сплит система, холодильник, телевизор, собственная ванная комната. Различные скидки сделают ваше пребывание еще более комфортным. К нам возвращаются с удовольствием!
Gabrieljency · July 30, 2023 at 9:49 am
http://test.kuli4kam.net/gallery/image/72-%D0%BF%D0%BE%D0%B4%D0%BB%D0%B8%D0%BD%D0%BD%D1%8B%D0%B9-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%B1%D0%BB%D0%B0%D0%BD%D0%BA%D0%B5-%D0%B1%D1%83%D1%82%D1%83%D1%80%D0%BB%D0%B8%D0%BD%D0%BE%D0%B2%D0%BA%D0%B0/
Michaelidons · July 30, 2023 at 10:17 am
https://demonity.cc/gallery/image/13-%D0%BD%D0%B0%D1%81%D1%82%D0%BE%D1%8F%D1%89%D0%B8%D0%B5-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D1%8B-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%B1%D0%BB%D0%B0%D0%BD%D0%BA%D0%B5-%D1%81-%D0%BF%D1%80%D0%BE%D0%B2%D0%BE%D0%B4%D0%BA%D0%BE%D0%B9/
Oscarnup · July 30, 2023 at 10:34 am
http://flemme.free.fr/redir.php?lien=https://killapods.eu/product-category/nicopods/pablo-snus/
RalphEDIND · July 30, 2023 at 10:45 am
сайт покердом
http://spearboard.com/member.php?u=1172297
Для тех, кто предпочитает играть на компьютере, у нас есть специальный клиент для ПК. Это удобное приложение позволит вам погрузиться в атмосферу азарта без лишних усилий. Не упустите шанс настоящего казино прямо у себя дома.С нами игра становится настоящим приключением. Вы переноситесь в мир азартных возможностей и неизведанных горизонтов. И только у нас вы найдете PokerDom Casino ? воплощение страсти и вдохновения.
Richardjoync · July 30, 2023 at 10:51 am
покер дом отзывы
сайт покердом
Не упустите шанс сделать свою жизнь более увлекательной и интересной. PokerDom Казино – это ваш билет в мир удачи и прибыли. Уникальные автоматы и захватывающие игры ждут вас. Станьте частью PokerDom Casino и покажите, что вы настоящий игрок!Каждый посетитель официального сайта PokerDom оценит его простоту использования и интуитивный интерфейс. Здесь вы найдете все необходимое для плавного и безупречного игрового процесса. Скачать клиент на ПК – это первый шаг к захватывающему путешествию по миру азарта и возможностей.
William#poucheuro[Wolusewozicejo,2,5] · July 30, 2023 at 11:11 am
Explore the world of [url=https://nicotine-pouches.store/eu/nicotine-pouches-eu/]nicotine pouches eu[/url] with our diverse range of flavors and robust strength!
Michaelidons · July 30, 2023 at 11:38 am
http://wokavo.beget.tech/club/user/2/blog/11/
Oscarnup · July 30, 2023 at 11:55 am
https://image.google.so/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
brillxVen · July 30, 2023 at 12:40 pm
казино Brillx
insurance costs · July 30, 2023 at 12:49 pm
These are really fantastic ideas in on the topic of blogging.
You have touched some pleasant things here. Any way keep up
wrinting.
My blog :: insurance costs
Michaelspoor · July 30, 2023 at 12:49 pm
https://optom-plus.ru/forum/art/otkroyte_dlya_sebya_novuy_mir_zagadok_i_tayn_s_filmami_detektivnue.html
Gabrieljency · July 30, 2023 at 12:58 pm
https://f-ingdiabolical.com/gallery/image/86-%D0%BD%D0%B0%D1%81%D1%82%D0%BE%D1%8F%D1%89%D0%B8%D0%B5-%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D1%8B-%D0%BE-%D1%81%D1%80%D0%B5%D0%B4%D0%BD%D0%B5%D0%BC-%D1%81%D0%BF%D0%B5%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D0%BC%D0%B5%D0%BD%D0%B4%D0%B5%D0%BB%D0%B5%D0%B5%D0%B2%D1%81%D0%BA/
Oscarnup · July 30, 2023 at 1:09 pm
https://ex-fs.net/go.php?url=https://killapods.eu/
Gabrieljency · July 30, 2023 at 1:24 pm
http://www.cookrecept.ru/forum/index.php?forum=1461235816&sub_forum=1461235827&topic=1690382516
abininnem · July 30, 2023 at 1:27 pm
На сайте https://iqsait.ru/ почитайте интересные статьи на самую разную тему: косметология, косметические процедуры, о том, как найти мужчину с деньгами и привлечь внимание. Также вы узнаете много интересных и ценных рекомендаций, советов, которые помогут сделать непростой выбор. Имеются статьи, которые помогут вам узнать, как научиться любить себя и принимать решения. Будете в курсе того, о чем говорить, если у вас первое свидание. Также есть информация и о воспитании, рождении детей. Есть статьи на психологическую тему, которые помогут разобраться в себе.
Ronaldidows · July 30, 2023 at 2:00 pm
онлайн казино покердом
https://fantlab.org/user210519
Добро пожаловать в захватывающий мир азартных развлечений — PokerDom Казино! Если вы ищете идеальное место для увлекательной игры в слоты на реальные деньги, то вы пришли по адресу. PokerDom ? официальный сайт, где вас ждут самые захватывающие лицензионные автоматы, специально отобранные командой опытных игровых гуру.Один из замечательных аспектов PokerDom Казино – это возможность скачать специальный клиент на ПК. Это обеспечит вас стабильным и плавным игровым процессом, а также даст доступ к дополнительным возможностям и акциям. Клиент на ПК – это, безусловно, великолепный выбор для тех, кто ценит качество и комфорт.
JeffreyCaste · July 30, 2023 at 2:02 pm
покердом зеркало для входа
покердом казино
Не упусти свой шанс сорвать крупный куш в PokerDom Казино! Заходи на наш официальный сайт прямо сейчас, скачивай клиент на ПК и наслаждайся увлекательными слотами на реальные деньги. Приготовься к невероятным приключениям, волнующим эмоциям и великолепным выигрышам в PokerDom Казино – лучшем месте для истинных ценителей азарта и качественной игры!ПокерДом Казино: играй в уникальные слоты и выигрывай реальные деньги прямо сейчас! Если ты ищешь надежное и лицензионное онлайн-казино, то PokerDom – это именно то, что тебе нужно. Наш официальный сайт предлагает широкий выбор самых популярных и увлекательных игровых автоматов.
Gabrieljency · July 30, 2023 at 2:05 pm
https://igro.market/club/user/944/forum/message/2529/2534/
Emma#pouchbrand[Qokosuvimibep,2,5] · July 30, 2023 at 2:06 pm
Indulge in the ultimate best [url=https://nicotine-pouches.store/en/buy-snus-nicotine-pouches/]buy snus nicotine pouches[/url] with our premium collection of flavors! Looking for chewing tobacco similar to snus? You’ve come to the right place! This is where you can buy modern chewing bags to most countries within the EU. We offer express shipping with UPS as well as the Swedish post, and orders are shipped daily on weekdays, which means that you could have your chewing bags and snus as early as tomorrow – depending on where you live. When ordering chewing bags online from us, you will notice that we take pride in offering the freshest chewing bags and the best price in combination with excellent customer service. Welcome to NICOTINE-POUCHES.STORE!
Davidrooto · July 30, 2023 at 2:15 pm
скачать покердом на деньги на андроид
покердом казино
На PokerDom Казино можно не только играть на деньги, но и наслаждаться демо-режимом, чтобы испытать слоты на вкус без каких-либо обязательств. Это уникальная возможность испытать весь спектр эмоций без лишних забот, как своего рода душевная прогулка по залам казино, где каждый игрок может почувствовать себя главным героем своей увлекательной истории.Особый аромат азарта раскроется через увлекательный клиент на ПК, который позволит окунуться в удивительный мир азартных развлечений на полную глубину. Скачать приложение ? значит открыть двери к волнующему путешествию по красочным локациям азартных возможностей. Теперь у каждого есть шанс совершить удачный оборот на рулетке жизни!
Oscarnup · July 30, 2023 at 2:21 pm
https://www.google.com.kw/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
ogdanASYNC · July 30, 2023 at 2:30 pm
На сайте https://spravkivmsk.com вы сможете заказать справку на официальной основе и максимально быстро. Компания оказывает полный спектр услуг, связанных с проведением медицинских осмотров. Важным преимуществом обращения в эту компанию является то, что отсутствуют очереди, а потому вы сможете подъехать к выбранному времени. Справка выдается на официальной основе. Здесь только приемлемые, низкие цены, которые точно вас устроят. Наиболее популярными услугами являются: справка от нарколога, для академического отпуска, справки различных форм.
Gabrieljency · July 30, 2023 at 3:00 pm
https://zdsim.ru/wiki/index.php/%D0%9D%D0%B0%D1%81%D1%82%D0%BE%D1%8F%D1%89%D0%B8%D0%B5_%D0%B4%D0%B8%D0%BF%D0%BB%D0%BE%D0%BC%D1%8B_%D0%BE_%D0%BD%D0%B0%D1%87%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC_%D0%BE%D0%B1%D1%80%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B8_%D0%90%D0%BF%D1%80%D0%B5%D0%BB%D0%B5%D0%B2%D0%BA%D0%B0
Gabrieljency · July 30, 2023 at 3:23 pm
http://bn.tobase.ru/viewtopic.php?f=30&t=1929
Oscarnup · July 30, 2023 at 3:29 pm
http://www.google.co.tz/url?q=https://killapods.eu/product-category/disposable-vapes/
Ronaldidows · July 30, 2023 at 3:50 pm
сайт покердом
http://morepc.ru/phpBB/viewtopic.php?p=27884
Итак, приготовьтесь к захватывающему путешествию в мир азартных развлечений. Покорите слоты PokerDom Casino, скачайте клиент на ПК или играйте онлайн на мобильном – выбор за вами. Помните, что удача любит смелых, поэтому докажите, что вы – настоящий азартный путник, и пусть фортуна всегда будет на вашей стороне!PokerDom Casino гордится тем, что предлагает уникальные бонусы и акции, которые придают вашим игровым сессиям дополнительный заряд энергии. Постоянным игрокам порой удается найти виртуозные решения и разработать стратегии, которые становятся ключом к победам.
JeffreyCaste · July 30, 2023 at 3:55 pm
покердом приложение
покердом казино
PokerDom Казино является официальным сайтом, где ты можешь играть в слоты на реальные деньги и испытать удачу в покере. Наше казино предлагает множество способов пополнения счета и вывода выигрышей, обеспечивая безопасность и конфиденциальность твоих финансовых операций.Не упусти свой шанс сорвать крупный куш в PokerDom Казино! Заходи на наш официальный сайт прямо сейчас, скачивай клиент на ПК и наслаждайся увлекательными слотами на реальные деньги. Приготовься к невероятным приключениям, волнующим эмоциям и великолепным выигрышам в PokerDom Казино – лучшем месте для истинных ценителей азарта и качественной игры!
alyushacle · July 30, 2023 at 4:07 pm
На сайте https://magiya-deneg.ru/ ознакомьтесь с ритуалами, а также тем, как привлечь благосостояние. В разделе находятся денежные аудиомедитации, заговоры, талисманы, обряды. Все это позволит улучшить финансовое положение. Для того чтобы расширить кругозор, необходимо почитать любопытные и информативные статьи на финансовую тематику. Это поможет притянуть финансовое благополучие, больше денег. Статьи написаны профессионалами, а потому вы точно получите достоверные, экспертные данные.
Davidrooto · July 30, 2023 at 4:13 pm
pokerdom android
https://chernyahovsk.su
На PokerDom Казино можно не только играть на деньги, но и наслаждаться демо-режимом, чтобы испытать слоты на вкус без каких-либо обязательств. Это уникальная возможность испытать весь спектр эмоций без лишних забот, как своего рода душевная прогулка по залам казино, где каждый игрок может почувствовать себя главным героем своей увлекательной истории.Каждый слот казино PokerDom ? это уникальный символ несравненного разнообразия. Перед вами разверзаются двери в другие миры и измерения, где герои крутят барабаны удачи, взирая на сияние драгоценных комбинаций. Станьте смелым исследователем невиданных до сих пор земель азарта и вам откроются сокровища, сделающие вашу жизнь намного интереснее!
Oscarnup · July 30, 2023 at 4:40 pm
https://www.tube188.com/check.php?url=https://killapods.eu/product-category/nicopods/pablo-snus/
casino79.in · July 30, 2023 at 4:40 pm
If you are a fan oof classikc slots, Drake Casino has lots to
offer.
my web sute … casino79.in
ErnestoVaf · July 30, 2023 at 4:59 pm
покердом казино
https://www.tuvaonline.ru/2014/11/20/v-kyzyle-skonchalsya-polittehnolog-analitik-zhurnalist-aleksandr-vladimirovich-kuzin.html
Итак, приготовьтесь к захватывающему путешествию в мир азартных развлечений. Покорите слоты PokerDom Casino, скачайте клиент на ПК или играйте онлайн на мобильном – выбор за вами. Помните, что удача любит смелых, поэтому докажите, что вы – настоящий азартный путник, и пусть фортуна всегда будет на вашей стороне!Что же касается самой главной приманки для многих игроков – слотов на реальные деньги, PokerDom просто не знает равных. Здесь вы найдете огромный ассортимент разнообразных слотов с различными тематиками и стилями. Неважно, вы новичок или опытный игрок, вам всегда найдется что-то интересное. Увлекательные приключения, древние мифы, фантастические миры и классические фруктовые аппараты – всего лишь малая часть того, что предлагает PokerDom.
Oscarnup · July 30, 2023 at 5:42 pm
http://tagil.my-choupette.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Michaelspoor · July 30, 2023 at 5:55 pm
https://lifefitness.ru/sites/pgs/kinokartinu_v_stile_fentezi_na_kotorue_stoit_obratit_vnimanie.html
Robertlolve · July 30, 2023 at 6:18 pm
покердом мобильная версия
покердом казино
Наш официальный сайт PokerDom предлагает более 500 уникальных слотов, каждый из которых имеет свою особенность и уникальный стиль. Независимо от того, ищешь ли ты приключения в древних пирамидах или азарт на побережье Карибского моря, мы гарантируем, что PokerDom Casino удовлетворит все твои игровые фантазии.Когда речь заходит о качестве, PokerDom Казино является неоспоримым лидером в мире онлайн-гемблинга. Наше казино предлагает клиентам только лицензионные автоматы от ведущих разработчиков игрового софта. Здесь каждый найдет свою удачу: от классических фруктовых слотов до современных многолинейных видеоигр.
ErnestoVaf · July 30, 2023 at 6:44 pm
онлайн казино покердом
https://rockufa.ru/forum/index.php?action=profile;area=summary;u=159783
Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы жаждете невероятных ощущений и уникального опыта игры в слоты на реальные деньги, то вы на верном пути. PokerDom Casino – это ваш билет в мир бесконечных возможностей и казино-впечатлений высшего уровня!Когда речь заходит о мире азартных игр, PokerDom Casino — это настоящая находка для истинных ценителей азарта. Опыт, накопленный за годы работы, позволил создать уникальный интернет-портал, на котором каждый найдет что-то по душе. Предлагаемая ассортиментом лицензионных автоматов поражает своим разнообразием, а качество графики и звука уносит вас в мир захватывающих приключений.
Oscarnup · July 30, 2023 at 6:45 pm
https://maps.google.com.sv/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
Davidrooto · July 30, 2023 at 7:02 pm
покердом официальный сайт
онлайн казино покердом
Лицензионные автоматы на PokerDom Casino – это настоящее сокровище для ценителей качественных игровых автоматов. Мы тщательно отбираем самые увлекательные и прибыльные слоты от ведущих разработчиков, чтобы каждый игрок мог найти свой идеальный вариант. Независимо от вашего опыта игры, у нас всегда найдется что-то особенное и неожиданное.Каждый день на PokerDom Casino проходят захватывающие турниры с огромными призовыми фондами. Примите участие в соревнованиях с лучшими игроками, проявите свою смекалку и умение блефовать, и, возможно, удача улыбнется именно вам. Не упустите свой шанс стать звездой азартного мира и завоевать славу настоящего победителя!
Edmondjoido · July 30, 2023 at 7:33 pm
https://telegra.ph/kakie-est-onlajn-zajmy-v-kazahstane-07-30-36
Oscarnup · July 30, 2023 at 7:47 pm
https://catalog-777.com/gotourl/aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9kaXNwb3NhYmxlLXZhcGVzLw/
Robertlolve · July 30, 2023 at 8:04 pm
скачать покердом на телефон с официального сайта
pokerdom
Когда речь заходит о качестве, PokerDom Казино является неоспоримым лидером в мире онлайн-гемблинга. Наше казино предлагает клиентам только лицензионные автоматы от ведущих разработчиков игрового софта. Здесь каждый найдет свою удачу: от классических фруктовых слотов до современных многолинейных видеоигр.У PokerDom Casino есть нечто особенное для каждого игрока. Необходимость скачивания клиента на ПК дает возможность наслаждаться плавной и бесперебойной игрой без проблем с интернет-соединением. Ощути мощь и стабильность, находясь в полном контроле над своим игровым процессом.
fonovencop · July 30, 2023 at 8:45 pm
Сайт https://ocas.pl/ это платформа, предназначенная для организации международных и внутренних грузоперевозок, которая соединяет перевозчиков и отправителей в Европе и Азии. Надежный и безопасный поиск оптимальных транспортных решений для грузоперевозок. Биржа Грузов и Транспорта поможет найти выгодные заказы и новых контрагентов. Удобный поиск, добавление грузов, поиск транспорта, актуальные предложения по грузам для перевозки – все в одном месте.
Oscarnup · July 30, 2023 at 8:49 pm
https://www.mascom.ru:443/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
Davidkiz · July 30, 2023 at 9:13 pm
онлайн казино покердом
http://niwawani.com/sanitary-washbasin/hy-3080_1_1
Когда речь заходит о качественной игровой платформе с безупречной репутацией, PokerDom Casino всегда находится в топе. Насладиться увлекательными азартными приключениями и попробовать свою удачу в наших лицензионных автоматах – легко и просто. Вам нужно всего лишь скачать клиент на ПК и создать аккаунт, и волшебный мир азартных игр раскроется перед вами.Покердом Казино – это не просто игра, это стиль жизни, которым делятся тысячи игроков по всему миру. Все они объединены общим стремлением к победе, азарту и радости от игры. Вы готовы присоединиться к этой удивительной азартной семье?
KevinMix · July 30, 2023 at 9:14 pm
pokerdom apk последняя версия
pokerdom
Погрузитесь в захватывающий мир азартных игр с PokerDom Casino – ведущим онлайн-казино, которое предлагает незабываемые игровые возможности. PokerDom Casino – это виртуальный рай для любителей азарта, где вы можете наслаждаться игрой в слоты на реальные деньги, а также сразиться с опытными игроками в покер.PokerDom Casino предоставляет уникальную возможность для всех игроков. Благодаря большому выбору игр и различным ставкам, каждый найдет здесь что-то по своему вкусу. Независимо от вашего уровня опыта, вы сможете насладиться атмосферой настоящего казино и ощутить адреналин, сопутствующий игре на реальные деньги.
Oscarnup · July 30, 2023 at 9:54 pm
https://sootak.blogsky.com/dailylink/?go=https%3A%2F%2Fkillapods.eu&id=1
Davidrooto · July 30, 2023 at 10:13 pm
pokerdom скачать на андроид на реальные
покердом
На PokerDom Casino вы найдете не только азартные развлечения, но и дружелюбную атмосферу, где каждый игрок сможет почувствовать себя в кругу единомышленников. Общайтесь в чате, обменивайтесь опытом, и кто знает, возможно, ваш новый друг принесет вам удачу в следующей игре.Добро пожаловать в увлекательный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь каждый игрок найдет все, что ему нужно для захватывающего досуга и возможности испытать свою удачу в играх на реальные деньги.
rfVen · July 30, 2023 at 10:25 pm
покердом casino
Oscarnup · July 30, 2023 at 10:53 pm
https://clients1.google.com.na/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
Davidkiz · July 30, 2023 at 10:58 pm
покердом казино
https://radaris.ru/p/%D0%A1%D0%B2%D0%B5%D1%82%D0%BB%D0%B0%D0%BD%D0%B0/%D0%A2%D1%83%D0%BB%D0%B8%D0%BD%D0%B0/
PokerDom Casino – ваш путь к ярким эмоциям, азарту и щедрым выигрышам. Не упустите свой шанс стать частью нашей казино-семьи и испытать настоящий драйв. Присоединяйтесь к нам прямо сейчас и откройте для себя увлекательный мир игры и развлечений!Когда речь заходит о безопасности и надежности, PokerDom Казино берет это на себя. Мы гарантируем честную игру и защиту ваших данных, чтобы вы могли наслаждаться азартом без лишних переживаний. Все наши слоты на реальные деньги проходят строгие проверки на соответствие стандартам качества, так что вы можете быть уверены в их честности и прозрачности.
BoecVarafinnagt · July 30, 2023 at 10:59 pm
Надежно и быстро можно тут [url=https://skachat-minecraft.site/]скачать Майнкрафт[/url].
KevinMix · July 30, 2023 at 11:04 pm
pokerdom скачать на андроид apk
покердом казино
Покердом Казино предлагает широкий выбор лицензионных автоматов, разработанных самыми известными провайдерами игрового софта. Здесь вы найдете разнообразие игр, включая классические слоты, видео-слоты и прогрессивные джекпоты. Безусловно, в PokerDom Casino вы не останетесь равнодушными к увлекательным приключениям, которые вас ждут.Чтобы начать играть, просто посетите официальный сайт PokerDom. Онлайн-платформа предоставляет мгновенный доступ к самым популярным играм и удобное интерфейсное решение. Скачивать дополнительное программное обеспечение не требуется. Это означает, что вы можете наслаждаться азартом в любом месте и в любое время, будь то на компьютере или мобильном устройстве.
Oscarnup · July 30, 2023 at 11:57 pm
https://77.biqund.com/index/d2?diff=0&utm_source=ogdd&utm_campaign=26669&utm_content=&utm_clickid=d34wc480ksg044w8&aurl=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F&an=&utm_term=&site=&isubs=0&pushMode=popup
kasatgon · July 31, 2023 at 12:04 am
На сайте https://proecodom.ru/bytovki/material/derevyannaya/ закажите деревянные бытовки, которые подходят для обустройства дачи. Перед вами утепленные домики из дерева. Важным преимуществом обращения в компанию является то, что на работы, материалы даются гарантии. Сделать заказ вы сможете прямо сейчас. На размещение деревянной бытовки уйдут всего несколько дней. Если нужно, то создается специальная подушка, которая выполняется из песка и гравия. Перед вами большой ассортимент решений, а на конструкции предоставляется скидка в 10%.
Oscarnup · July 31, 2023 at 1:00 am
https://tieuhocvanchuong.edu.vn/index.php?language=vi&nv=statistics&nvvithemever=t&nv_redirect=aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9kaXNwb3NhYmxlLXZhcGVzLw==
stend_rhymn · July 31, 2023 at 1:27 am
изготовление информационных стендов москва https://pos-reklama.ru/
Oscarnup · July 31, 2023 at 2:04 am
https://mykharkov.info/go.php?url=https://killapods.eu/product-category/disposable-vapes/
valeriurido · July 31, 2023 at 2:44 am
По ссылке https://apps.apple.com/app/islandjet-cursed-chest/id6450366809 вы сможете скачать обычный мод – он добавит игре сундуки, которые созданы из традиционных материалов. Мод сможет добавить несколько видов сундуков. Наиболее популярным и лучшим является обсидиановый, который вмещает в себя в несколько раз больше предметов, если сравнивать с обычными вариантами. Кроме того, у вас получится сформировать различные предметы, которые расширят функциональные возможности сундука. Скачивайте мод прямо сейчас, чтобы увеличить свои возможности.
Linazex · July 31, 2023 at 3:20 am
покердом скачать apk
покердом
Если вы ищете надежное онлайн-казино с большим выбором автоматов и возможностью играть на реальные деньги, PokerDom – ваш идеальный партнер в мире азартных игр. Не упустите шанс испытать удачу и получить незабываемые впечатления от игры в лицензионные слоты. Подготовьтесь к захватывающим приключениям и крупным выигрышам на официальном сайте PokerDom Казино!PokerDom Casino – это современный игровой портал, предлагающий широкий выбор игр и возможность сорвать солидный куш. На нашем официальном сайте вы найдете множество интересных слотов, оживленных карт и захватывающих турниров. ПокерДом несет в себе дух истинного азарта и предоставляет уникальные возможности для настоящих ценителей азартных игр.
StevenSwock · July 31, 2023 at 3:22 am
онлайн казино покердом
http://civilfund.ru/article/findbyitem/123?order=rel&type=3&Article_page=14
Приятным бонусом является то, что PokerDom Casino предлагает мгновенные и безопасные методы пополнения и вывода средств. Все операции осуществляются с использованием передовых технологий шифрования, что гарантирует абсолютную безопасность ваших финансовых транзакций.Покердом Казино ? это не просто место для азартных игр, это настоящий храм удачи и волнения, где каждый шаг к победе приносит невероятное удовольствие. Наш клиент для ПК обеспечит вас стабильным и безопасным игровым процессом, где вы сможете наслаждаться всеми преимуществами нашего казино прямо у себя дома.
Davidrooto · July 31, 2023 at 3:34 am
сайт покердом
https://izbass.ru
Один из главных плюсов PokerDom Casino – это возможность скачать клиент на ПК и наслаждаться игрой в своем личном темпе. Вам больше не нужно зависеть от скорости интернет-соединения, так как клиент обеспечивает стабильную и бесперебойную работу, что делает игровой процесс еще более комфортным и беззаботным.Мы позаботились о вашей безопасности, используя передовые технологии шифрования данных, чтобы вы могли наслаждаться игрой, зная, что ваша личная информация в надежных руках. PokerDom Casino стремится обеспечить честную игру, и наш генератор случайных чисел сертифицирован независимыми аудиторами.
oshkalus · July 31, 2023 at 3:41 am
По ссылке https://play.google.com/store/apps/details?id=com.ba11.way.app насладитесь интересной, яркой и захватывающей игрой, которая перенесет вас в другую Галактику. На пути будут астероиды, цель которых – помешать дойти до финала. В игре Вавада несколько уровней сложности, которые захватывающие, интересные и динамичные. Отправьтесь в путешествие в космос и начинайте исследование самых разных Галактик. Важным достоинством игры считается то, что она простая, понравится всем геймерам, независимо от возраста.
dolor pecho ansiedad · July 31, 2023 at 3:55 am
Pretty! This was a really wonderful article. Many thanks for providing these details.
Michaelspoor · July 31, 2023 at 3:57 am
https://steklo17.ru/inc/pags/svetochi_sovremennogo_kino__top_dramaticheskih_filmov_2023_goda.html
Oscarnup · July 31, 2023 at 4:08 am
http://lib.adai.washington.edu/dbtw-wpd/exec/dbtwpub.dll?BU=http%3A//killapods.eu&QB0=AND&QF0=PubNo&QI0=*&TN=ArticlesMain&DF=PubsYear&RF=PubsYear&AC=QBE_QUERY&CS=0&MF=searchbutton.ini
Oscarnup · July 31, 2023 at 5:11 am
https://openbox.ua/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
StevenSwock · July 31, 2023 at 5:14 am
онлайн казино покердом
https://forum.borealis.su/index.php?members/nospemogna.32287/
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск завершен. Здесь вы сможете ощутить настоящую эйфорию от игры на лицензионных автоматах, о которой вы даже не могли мечтать.Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете место, где можно не только испытать удачу, но и насладиться атмосферой настоящего казино прямо у себя дома, то вы обнаружили именно то, что искали.
Linazex · July 31, 2023 at 5:17 am
pokerdom mobile скачать андроид
pokerdom
PokerDom Casino – это современный игровой портал, предлагающий широкий выбор игр и возможность сорвать солидный куш. На нашем официальном сайте вы найдете множество интересных слотов, оживленных карт и захватывающих турниров. ПокерДом несет в себе дух истинного азарта и предоставляет уникальные возможности для настоящих ценителей азартных игр.Играя на PokerDom, вы ощутите неповторимую атмосферу азартного веселья, где ваши навыки и стратегия будут принимать решающее значение. Наше казино предлагает различные варианты игры, чтобы удовлетворить потребности каждого игрока. Вы можете выбрать из множества слотов, которые предлагают неповторимые сюжеты и захватывающие бонусные раунды.
HALT65 · July 31, 2023 at 5:43 am
No matter if some one searches for his essential thing, thus he/she wants
to be available that in detail, therefore that thing is maintained over here.
Oscarnup · July 31, 2023 at 6:15 am
https://noyabrsk.academica.ru/bitrix/rk.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Davidrooto · July 31, 2023 at 6:28 am
pokerdom apk скачать бесплатно
https://izbass.ru
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск приведет вас прямо к нам. PokerDom Casino – это не просто обычное казино, это настоящий рай для ценителей азартных развлечений и высококлассных лицензионных автоматов.Так что, если вы ищете надежное и увлекательное онлайн-казино с лицензионными автоматами и возможностью скачать клиент на ПК, то PokerDom Casino – ваш идеальный выбор. Подарите себе фантастические эмоции и азартное веселье прямо сейчас! Начните свой путь к богатству и успеху вместе с нами, и вы не пожалеете о своем выборе. Добро пожаловать в PokerDom Casino – где сбываются мечты азартных путешествий!
Robertvaw · July 31, 2023 at 6:53 am
сайт покердом
http://dehartalarms.com/upcoming-events/item/37-lorem-ipsum-dolor-sit-amet/37-lorem-ipsum-dolor-sit-amet.html?start=70
Как мы создали такое уникальное казино? Ответ прост ? наша команда вдохновленных и творческих профессионалов стремится предложить вам неповторимые игровые автоматы, которые никогда не оставят вас равнодушными. Мы заботимся о каждом детале, чтобы ваш опыт был запоминающимся и особенным.Играя в онлайн-слоты на реальные деньги на PokerDom Казино, вы откроете для себя захватывающий мир азартных автоматов, которые созданы с использованием передовых технологий от ведущих разработчиков игрового софта. Уникальные и необычные графические решения, захватывающий геймплей и богатый выбор лицензионных автоматов позволят окунуться в невероятные приключения на барабанах!
AndresGob · July 31, 2023 at 6:58 am
покердом официальный сайт
покердом казино
Наше онлайн-казино предлагает непревзойденные бонусы и акции, которые добавят дополнительную пикантность в вашу игровую сессию. Мы уверены, что вы оцените нашу щедрость и останетесь довольны как новички, так и опытные игроки.PokerDom Казино – это гарантированный способ получить массу удовольствия и возможность выиграть впечатляющие призы. Не упускайте возможность попробовать свою удачу в захватывающих слотах и покерных турнирах, предоставляемых нашим официальным сайтом.
vk01.io · July 31, 2023 at 7:11 am
Hello! I’ve been reading your website for a long
time now and finally got the courage to go ahead and give you a shout out from
Huffman Texas! Just wanted to mention keep up the excellent job!
ThomasFrori · July 31, 2023 at 7:13 am
kraken биржа
Oscarnup · July 31, 2023 at 7:21 am
http://www.tcythg.edu.vn/protect/?https://killapods.eu/product-category/nicopods/pablo-snus/
adyusDOb · July 31, 2023 at 7:28 am
Медцентр Союзмед https://souzmed.spb.ru/ это большой выбор услуг по различным медицинским справкам и медкнижкам. В том числе справки для бассейна, справка для ГИМС, для спортзала, справка для студентов и многое другое. А также мед книжка для водителя, для общепита, парикмахера, воспитателя, медкнижка моряка и прочее. Все цены указаны на сайте. Ознакомьтесь с большим перечнем услуг.
BobbyDah · July 31, 2023 at 8:30 am
уникальный бонус код cat casino 2023
https://sportmag-msk.ru
Кэт Казино приглашает вас испытать незабываемые ощущения и стать частью нашего игрового сообщества. Здесь каждый найдет свою удачу и получит долю адреналина. Присоединяйтесь к нам уже сегодня и окунитесь в мир веселья и возможностей, который ждет вас в Cat Casino.Cat Casino – это не просто игровой портал, это источник впечатлений и удовольствия. Здесь вы найдете необычные и оригинальные игры, которые отличаются своими уникальными функциями и высокими шансами на выигрыш. Cat Casino предлагает широкий выбор игр с различными стилями и темами, чтобы каждый мог найти что-то по своему вкусу.
Oscarnup · July 31, 2023 at 8:31 am
http://url-blog.xtgem.com/index/__xtblog_entry/301603-memasang-script-komentar-facebook-di-xtgem?__xtblog_block_id=1&name=Ahmad+sahid&site=killapods.eu&title=Trik+trik+sahid&logo=mastiway.com/services/recommend/logo_genrator/processimg.php&icon=
Robertvaw · July 31, 2023 at 8:42 am
сайт покердом
http://bonbone.ru/catalogue/sms/654365
Добро пожаловать в увлекательный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь каждый желающий сможет окунуться в захватывающий мир азартных игр и настоящего азарта. Если вы ищете надежное и качественное онлайн-казино, которое предлагает самые интересные слоты на реальные деньги, вы пришли по адресу!Мы ценим наших игроков и поэтому предлагаем лучшие бонусы и акции на рынке азартных развлечений. Уникальные промокоды и редкие бонусы ждут вас, чтобы сделать ваш опыт еще более запоминающимся и приблизить вас к джекпоту!
TerryBeaup · July 31, 2023 at 8:45 am
покердом
покердом казино
Что касается клиента на ПК, то здесь у нас приятные сюрпризы. Наша команда разработчиков создала удобный и функциональный софт, который позволяет наслаждаться азартом без лагов и сбоев. Больше не нужно терять время на загрузку игр в браузере, установите наш клиент и наслаждайтесь быстрым доступом к вашим любимым азартным развлечениям.Какими бы ни были ваши игровые предпочтения, PokerDom Casino готов предложить вам широкий выбор азартных развлечений. Вас ждут лучшие лицензионные автоматы, которые поражают своим качеством и щедрыми выплатами. Неважно, являетесь ли вы опытным игроком или только начинаете свой путь в мире азартных игр, здесь вы обязательно найдете что-то, что затянет вас надолго.
AndresGob · July 31, 2023 at 8:49 am
pokerdom сайт
pokerdom
Не откладывайте на завтра то, что можете испытать уже сегодня. Скачайте PokerDom Casino и окунитесь в мир азарта и волнения. Будьте уверены, что ваше путешествие в нашем казино будет полным уникальных моментов и незабываемых впечатлений. Доверьтесь нам, и мы гарантируем, что ваша игровая сессия станет по-настоящему захватывающей. Покердом Казино – ваш путь к незабываемым приключениям и крупным выигрышам!Покердом Казино – это пространство, где вы сможете насладиться захватывающими приключениями в мире азартных игр. Как официальный сайт PokerDom, мы предлагаем уникальные возможности для тех, кто стремится испытать свою удачу и почувствовать адреналин, покоряя лицензионные автоматы.
노래방알바 · July 31, 2023 at 8:58 am
The findings reflected the opinions of 1,300 American “household heads,” whom the Fed surveyed over the course of the 12 months to March 2023.
Look aat my homepage … 노래방알바
datingportal reviews · July 31, 2023 at 9:33 am
Stunning quest there. What happened after? Good luck!
Oscarnup · July 31, 2023 at 9:40 am
https://libertycity.ru/engine/modules/getlink.php?link=https://killapods.eu/
RomanBup · July 31, 2023 at 10:14 am
pokerdom
http://foromaestros.com/profile.php?id=182210
Мы стремимся предоставить нашим игрокам максимум удовольствия, поэтому наш сайт легок в навигации, а регистрация занимает всего несколько мгновений. Вам остается лишь выбрать свою удачную игру и начать путь к победам!Добро пожаловать в увлекательный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь каждый желающий сможет окунуться в захватывающий мир азартных игр и настоящего азарта. Если вы ищете надежное и качественное онлайн-казино, которое предлагает самые интересные слоты на реальные деньги, вы пришли по адресу!
Morgantiz · July 31, 2023 at 10:19 am
покердом промокод
покердом казино
Качество и надежность – вот главные принципы PokerDom Casino. Заходя на официальный сайт, вы можете быть уверены в безопасности своих денег и персональной информации. Лицензированные автоматы гарантируют честную игру и равные шансы на победу для каждого игрока.Покердом Казино – это не только азартные игры, но и бонусы, акции и специальные предложения. Постоянно обновляемый список приветственных бонусов порадует новых игроков, а регулярные акции порадуют постоянных посетителей. Здесь каждый найдет что-то по своему вкусу.
BobbyDah · July 31, 2023 at 10:45 am
cat casino бонус коды
https://sportmag-msk.ru
Cat Casino – это не просто игровой портал, это источник впечатлений и удовольствия. Здесь вы найдете необычные и оригинальные игры, которые отличаются своими уникальными функциями и высокими шансами на выигрыш. Cat Casino предлагает широкий выбор игр с различными стилями и темами, чтобы каждый мог найти что-то по своему вкусу.Не упустите возможность окунуться в мир развлечений с Cat Casino. Загрузите игровые автоматы или играйте онлайн прямо сейчас. Получайте удовольствие от азартных игр в компании надежного и качественного казино. Cat Casino – ваш путь к большим выигрышам и незабываемым приключениям.
Oscarnup · July 31, 2023 at 10:51 am
https://ogorodum.ru/ads/redir.php?url=https://killapods.eu/fi/product-category/nikotiinipussit/
TerryBeaup · July 31, 2023 at 11:14 am
pokerdom скачать
онлайн казино покердом
Не упустите свой шанс попробовать удачу вместе с нами. PokerDom Казино – это качественное азартное развлечение, лицензионные слоты, увлекательные турниры и поддержка наших игроков на каждом этапе. Присоединяйтесь к нашему сообществу азартных энтузиастов и окунитесь в захватывающий мир игры на реальные деньги. Будьте на волне успеха с PokerDom Casino!PokerDom Casino предоставляет больше, чем просто возможность играть. Мы создали настоящее сообщество единомышленников, которые разделяют свою страсть к азартным играм. У нас вы можете общаться с другими игроками, делиться опытом и обмениваться уникальными стратегиями. Кто знает, может быть, именно здесь вы найдете того самого соперника, которого так долго искали?
RomanBup · July 31, 2023 at 12:03 pm
pokerdom
http://bear.s19.xrea.com/x/board/board.cgi?page=3
Так что не теряйте времени зря, присоединяйтесь к нам и погрузитесь в захватывающий мир азартных развлечений! PokerDom Casino ? это ваш билет в мир азартной магии и возможность сделать вашу жизнь более яркой и насыщенной. Начните свое путешествие к успеху прямо сейчас и пусть удача всегда будет на вашей стороне!Не откладывайте свою удачу на потом! Присоединяйтесь к нам на официальном сайте PokerDom Casino прямо сейчас, скачайте клиент на ПК и окунитесь в захватывающий мир азартных развлечений. Большие выигрыши и незабываемые эмоции ждут вас уже сегодня!
Oscarnup · July 31, 2023 at 12:05 pm
http://vaninax.online.fr/Redir.php?r=https://killapods.eu/product-category/disposable-vapes/
Morgantiz · July 31, 2023 at 12:11 pm
скачать покердом на андроид последнюю версию
pokerdom
Скачивание клиента на ПК – простой и быстрый процесс. Вам потребуется всего несколько минут, чтобы получить доступ к полной коллекции игр и погрузиться в мир азарта. Отличная оптимизация программы позволяет наслаждаться плавной работой и высоким качеством графики.Покердом Казино – лучшее место для ценителей азартных развлечений и острых ощущений! Если вы ищете официальный сайт, где можно скачать и играть онлайн в слоты на реальные деньги, то PokerDom Casino идеально подойдет для вас. Этот надежный игровой портал предлагает клиент на ПК, а также доступ к лицензионным автоматам.
BobbyDah · July 31, 2023 at 12:53 pm
cat casino игровые автоматы
cat casino
Cat Casino предлагает широкий выбор игр, чтобы каждый нашел что-то по своему вкусу. У нас вы найдете классические игровые автоматы, увлекательные видеослоты, а также прогрессивные джекпоты, которые могут принести вам огромные выигрыши. Наша коллекция игр постоянно обновляется, чтобы вы могли наслаждаться самыми новыми и интересными слотами.Наше казино предлагает скачать игровые автоматы, чтобы вы могли насладиться игрой в любое удобное время. Благодаря современной технологии, вы сможете погрузиться в захватывающий мир игровых автоматов прямо на своем устройстве. Неважно, где вы находитесь, вам всегда доступны самые популярные слоты и увлекательные азартные игры.
Oscarnup · July 31, 2023 at 1:11 pm
https://pugwash.lib.warwick.ac.uk:443/webbridge~S1/showresource?resurl=https%3a%2f%2fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F&linkid=1345737&noframe=1
ThomasFrori · July 31, 2023 at 1:28 pm
кракен зеркало
TerryBeaup · July 31, 2023 at 1:29 pm
скачать покердом на телефон
pokerdom
Какими бы ни были ваши игровые предпочтения, PokerDom Casino готов предложить вам широкий выбор азартных развлечений. Вас ждут лучшие лицензионные автоматы, которые поражают своим качеством и щедрыми выплатами. Неважно, являетесь ли вы опытным игроком или только начинаете свой путь в мире азартных игр, здесь вы обязательно найдете что-то, что затянет вас надолго.И это еще не все! Чтобы сделать наше казино еще более привлекательным, мы подготовили множество акций и бонусов. Наши драйвовые турниры позволят вам почувствовать себя участником настоящего покерного чемпионата, а розыгрыши призов и фриспинов подарят вам дополнительные шансы на победу. На PokerDom Casino каждый игрок важен для нас, и мы стараемся сделать ваше пребывание здесь по-настоящему незабываемым.
zakznaet_rhymn · July 31, 2023 at 1:36 pm
https://zakznaet.ru/
RomanBup · July 31, 2023 at 1:46 pm
сайт покердом
https://www.informetr.ru/forum/viewtopic.php?pid=3017451
Не откладывайте свою удачу на потом! Присоединяйтесь к нам на официальном сайте PokerDom Casino прямо сейчас, скачайте клиент на ПК и окунитесь в захватывающий мир азартных развлечений. Большие выигрыши и незабываемые эмоции ждут вас уже сегодня!Добро пожаловать в увлекательный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь каждый желающий сможет окунуться в захватывающий мир азартных игр и настоящего азарта. Если вы ищете надежное и качественное онлайн-казино, которое предлагает самые интересные слоты на реальные деньги, вы пришли по адресу!
Michaelspoor · July 31, 2023 at 2:00 pm
https://www.web-sputnik.ru/news/articles/amerikanskoe_kino__evoluciya_i_vliyanie.html
Morgantiz · July 31, 2023 at 2:01 pm
скачать мобильный покердом
покердом казино
Качество и надежность – вот главные принципы PokerDom Casino. Заходя на официальный сайт, вы можете быть уверены в безопасности своих денег и персональной информации. Лицензированные автоматы гарантируют честную игру и равные шансы на победу для каждого игрока.PokerDom Casino – ваш путь к большим выигрышам и незабываемым приключениям в мире азарта. Не откладывайте удачу в долгий ящик, посетите официальный сайт прямо сейчас, скачайте клиент на ПК и окунитесь в удивительную атмосферу этого замечательного казино. Покердом Казино – место, где рождаются легенды азартных игр!
Kennethraf · July 31, 2023 at 2:16 pm
скачать приложение pokerdom
https://alternativebox.ru
Интересуетесь ли вы классическими слотами или современными авангардными играми, у нас есть все, чтобы удовлетворить ваш азартный аппетит. Наши лицензионные автоматы от ведущих разработчиков гарантируют честную игру и честные выплаты. Надежность и безопасность ? наш главный приоритет.Наш клиент для ПК обеспечивает стабильное и безопасное подключение к нашим лицензионным автоматам. Не требуется много времени на установку — всего несколько кликов, и вы окунетесь в мир возможностей. ПокерДом скачать — значит, вступить в команду азартных победителей, где каждый имеет шанс проявить свои навыки и стать легендой азартной вселенной.
Stephentix · July 31, 2023 at 2:16 pm
cat casino вход
кэт казино
Наше казино предлагает скачать игровые автоматы, чтобы вы могли насладиться игрой в любое удобное время. Благодаря современной технологии, вы сможете погрузиться в захватывающий мир игровых автоматов прямо на своем устройстве. Неважно, где вы находитесь, вам всегда доступны самые популярные слоты и увлекательные азартные игры.Онлайн-игры на Cat Casino – это возможность испытать удачу без необходимости скачивания. Вы можете играть прямо в браузере, не теряя времени на установку приложения. Мгновенный доступ к игровым автоматам позволяет вам насладиться волнующими эмоциями в любом месте и в любое время. Cat Casino гарантирует высокое качество графики и плавность игры, чтобы каждый ваш спин был неповторимым и захватывающим.
BryanRed · July 31, 2023 at 2:17 pm
сайт покердом
http://www.kuban-okno.ru/forum/viewtopic.php?id=4448
Так что не упустите свой шанс испытать удачу и ощутить настоящий азарт. Загляните на официальный сайт PokerDom Casino, скачайте клиент на ПК и погрузитесь в мир увлекательных слотов на реальные деньги. У нас каждый игрок – настоящий победитель, и вы можете стать одним из них!Чтобы насладиться азартом на полную катушку, вам предоставляется возможность скачать клиент PokerDom на свой ПК. Это обеспечит более стабильный доступ к нашим играм, богатый функционал и более высокое качество графики. Клиент на ПК – это надежный спутник каждого истинного ценителя азартных развлечений.
Oscarnup · July 31, 2023 at 2:20 pm
https://toolbarqueries.google.com.ai/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
ThomasFrori · July 31, 2023 at 2:27 pm
кракен крн
Linazex · July 31, 2023 at 2:32 pm
скачать покердом на андроид
покердом казино
Не нужно тратить время на поиск других площадок для игры. PokerDom Casino предоставляет вам возможность скачать наш клиент на ПК и наслаждаться азартом без ограничений. Благодаря современному программному обеспечению и качественной графике, наши слоты заставят вас забыть о реальности и окунуться в мир возможностей.Итак, если вы готовы испытать адреналин и взять участие в захватывающих приключениях, PokerDom Casino – ваш путь к большим выигрышам. Покердом Казино предлагает широкий выбор слотов, скачиваемый клиент на ПК и возможность играть на реальные деньги. Присоединяйтесь к нам и окунитесь в мир азарта и развлечений прямо сейчас!
losevlox · July 31, 2023 at 2:53 pm
По ссылке https://play.google.com/store/apps/details?id=com.t0wer.jumpeeer вы найдете увлекательную, интересную и удивительную игру Tower Jump. Она выполнена в стиле приключений, относится к казуальным, аркадным играм. Сейчас в нее играет несколько тысяч геймеров, которые получают от нее адреналин, положительные и яркие эмоции. Драйвовая игра поможет расслабиться и снять стресс. У нее отличная графика, чистый звук, идеальное изображение. Поиграйте в нее и вы. Игра была создана не так давно – в 2018 году, но уже заполучила миллионную аудиторию.
Oscarnup · July 31, 2023 at 3:30 pm
https://clients1.google.nr/url?q=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F/
HaroldLem · July 31, 2023 at 3:52 pm
купить квартиру вторичку советский район
riskalChigo · July 31, 2023 at 3:57 pm
По ссылке https://play.google.com/store/apps/details?id=com.box.stars.app вы сможете сделать ставки на самые разные спортивные состязания. Это спортивное приложение идеально подойдет для тех, кому нравится UFC, а также другие не менее известные виды спорта. С этим приложением вы всегда будете знать о предстоящих соревнованиях, будете в курсе того, когда начнется ваше спортивное состязание, узнаете о победах и поражениях любимых команд. Так вы никогда не пропустите важное событие. Обновление данных происходит в режиме реального времени. Вот почему вы сможете отслеживать происходящее.
Kennethraf · July 31, 2023 at 4:01 pm
скачать приложение pokerdom
https://alternativebox.ru
Когда вы выбираете PokerDom Casino, вы становитесь частью нашего большого сообщества единомышленников. У нас царит атмосфера дружелюбия и взаимопонимания. Вы можете общаться с другими игроками, делиться опытом, обмениваться советами. Ведь азартная игра объединяет людей в уникальную сплоченную семью.Интересуетесь ли вы классическими слотами или современными авангардными играми, у нас есть все, чтобы удовлетворить ваш азартный аппетит. Наши лицензионные автоматы от ведущих разработчиков гарантируют честную игру и честные выплаты. Надежность и безопасность ? наш главный приоритет.
BryanRed · July 31, 2023 at 4:03 pm
покердом
https://nzt.eth.link/wiki/Russian_presidential_election%2C_2012.html
Так что не упустите свой шанс испытать удачу и ощутить настоящий азарт. Загляните на официальный сайт PokerDom Casino, скачайте клиент на ПК и погрузитесь в мир увлекательных слотов на реальные деньги. У нас каждый игрок – настоящий победитель, и вы можете стать одним из них!Наше казино ориентировано на максимальный комфорт игрока. Мы предоставляем множество способов пополнения и вывода средств, чтобы каждый мог выбрать наиболее удобный для себя. При этом вы можете быть абсолютно уверены в безопасности своих транзакций и конфиденциальности данных.
Jess · July 31, 2023 at 4:05 pm
Gordon, Larry (July 9, 2021). “CSUN is getting $265 million in COVID reduction, far more than any college in California”. Chandler, Carmen (August 31, 2021). “CSU to Launch Global Hispanic Serving Institution Equity Innovation Hub”.
Look at my web site: http://Medisweep.Subnara.info/bbs/board.php?bo_table=free&wr_id=178565
nislavNaree · July 31, 2023 at 4:19 pm
Сайт Гранд Отель Белорусская https://grandbelorusskaya-hotel.ru/ – это отличный отель в историческом центре Москвы. Комфортные номера различных категорий позволяют выбрать оптимальную цену на размещение. Номера оборудованы всем необходимым, в том числе баром, чайной станцией, плазменным телевизором, телефоном, Wi-FI и другими удобствами. Все сделано для комфортного отдыха гостей, в том числе завтрак Шведский стол.
Linazex · July 31, 2023 at 4:22 pm
скачать покердом на андроид последнюю версию
pokerdom
Покердом Казино – место, где страсть к азартным играм оживает на вашем экране. Если вы ищете захватывающий опыт и возможность выигрывать настоящие деньги, PokerDom Casino – ваш идеальный выбор. Наш официальный сайт предлагает множество возможностей для погружения в мир азартных развлечений и бесконечного веселья.Итак, если вы готовы испытать адреналин и взять участие в захватывающих приключениях, PokerDom Casino – ваш путь к большим выигрышам. Покердом Казино предлагает широкий выбор слотов, скачиваемый клиент на ПК и возможность играть на реальные деньги. Присоединяйтесь к нам и окунитесь в мир азарта и развлечений прямо сейчас!
Stephentix · July 31, 2023 at 4:29 pm
cat casino промокод для новых игроков
https://mylifesport.ru
Cat Casino — официальный сайт, где в 2023 году можно скачать самые захватывающие игровые автоматы и насладиться игрой онлайн. Если вы ищете место, где можно испытать адреналин и веселье, то Кэт Казино — идеальный выбор. Здесь вас ждут множество уникальных возможностей и незабываемые впечатления.Кэт Казино приглашает вас испытать незабываемые ощущения и стать частью нашего игрового сообщества. Здесь каждый найдет свою удачу и получит долю адреналина. Присоединяйтесь к нам уже сегодня и окунитесь в мир веселья и возможностей, который ждет вас в Cat Casino.
Oscarnup · July 31, 2023 at 4:40 pm
https://clients1.google.co.ma/url?sa=t&url=https://killapods.eu/fi/product-category/nikotiinipussit/
HaroldLem · July 31, 2023 at 5:20 pm
кто оплачивает услуги риэлтора продавец или покупатель
eonidReM · July 31, 2023 at 5:36 pm
На сайте https://proecodom.ru/bytovki/dopolnitelno/s-hozblokom/ вы сможете заказать бытовку хозблок. Все работы выполняются компетентными, опытными сотрудниками «под ключ». Предоставляется гарантия от производителя как на работу, так и материалы. Заказать домик вы сможете прямо сейчас и по вполне привлекательной цене. Ознакомьтесь с разделом, в котором находятся популярные товары, которые выбирает большинство. Напротив каждой бытовки имеется описание. Изучите его перед покупкой.
Kennethraf · July 31, 2023 at 5:42 pm
покердом апк
https://alternativebox.ru
Не забывайте также о нашей мобильной версии. Теперь любимые слоты всегда с вами, ведь вы можете играть в PokerDom Casino прямо на своем смартфоне или планшете. Это удобно и позволяет быть гибким, выбирая время и место для своей игры.PokerDom Casino ? это не просто онлайн казино, это настоящий калейдоскоп развлечений, где каждый игрок найдет что-то особенное. Мы заботимся о нашей аудитории и предлагаем только самое лучшее. Наши слоты не похожи на те, что вы встретите на других платформах. У нас вы сможете насладиться уникальными играми, которые разрабатывались с любовью и креативностью наших талантливых разработчиков.
BryanRed · July 31, 2023 at 5:42 pm
онлайн казино покердом
https://lernmerkstatt.de/index.php/component/k2/item/2-donec-ullamcorper-nulla-non-ms-ac-is?start=3220
Наше казино ориентировано на максимальный комфорт игрока. Мы предоставляем множество способов пополнения и вывода средств, чтобы каждый мог выбрать наиболее удобный для себя. При этом вы можете быть абсолютно уверены в безопасности своих транзакций и конфиденциальности данных.Мы понимаем, что каждый клиент уникален и заслуживает особого внимания. Поэтому в PokerDom Casino мы предлагаем щедрые бонусы и акции для новых и постоянных игроков. Не упустите шанс получить дополнительные вознаграждения и бесплатные спины для увеличения своих шансов на победу.
Oscarnup · July 31, 2023 at 5:49 pm
https://images.google.com.do/url?sa=t&url=https://killapods.eu/product-category/nicopods/pablo-snus/
rekovmor · July 31, 2023 at 6:09 pm
На сайте https://terembrus.ru/category/doski/doska-listvennitsa/ вы узнаете, что покупка доски из лиственницы – это удачное решение для вашего строительного или декоративного проекта. Лиственница, прекрасное хвойное дерево, обладает невероятной прочностью и естественной красотой. Вы сможете создать прочные полы, стены, потолки, террасы или мебель, придающие уют и элегантность вашему дому или бизнесу.
Linazex · July 31, 2023 at 6:09 pm
покердом скачать на андроид бесплатно
онлайн казино покердом
Когда вы становитесь частью PokerDom Casino, открывается целая вселенная лицензионных автоматов, которые поражают своим разнообразием и яркостью. У нас есть слоты на любой вкус: классические фруктовые машины, эксклюзивные игры с невероятными призами и тематические автоматы, переносящие вас в увлекательные приключения.Итак, если вы готовы испытать адреналин и взять участие в захватывающих приключениях, PokerDom Casino – ваш путь к большим выигрышам. Покердом Казино предлагает широкий выбор слотов, скачиваемый клиент на ПК и возможность играть на реальные деньги. Присоединяйтесь к нам и окунитесь в мир азарта и развлечений прямо сейчас!
epannEvado · July 31, 2023 at 6:28 pm
Автомобильный журнал M-Top https://moftop.ru/ это полезный и интересный ресурс для автолюбителей, где собраны самые познавательные новости и статьи об авто, тюнинге, ремонте, а также различные обзоры. Свежая, актуальная информация и интересная подача материала сделают вас частым гостем на нашем сайте, а рубрика Ремонт поможет получить гайды и мануалы, как сделать или заменить какую-то деталь или компонент в авто
Stephentix · July 31, 2023 at 6:37 pm
игровые автоматы cat casino
https://mylifesport.ru
Скачивание игровых автоматов на Cat Casino – это просто и удобно. После быстрой регистрации на сайте, вы сможете скачать приложение и наслаждаться своими любимыми играми в любое время. Казино Cat предлагает уникальные бонусы и акции, которые превратят вашу игру в настоящий карнавал удачи. Развлекайтесь вместе с Кэт Казино и ощутите азарт на себе.Cat Casino приветствует своих гостей ярким и стильным дизайном, который не оставит вас равнодушными. На сайте представлены самые популярные слоты от ведущих разработчиков программного обеспечения. Здесь вы найдете эксклюзивные игры, которые нельзя найти нигде еще. Разнообразие тематик и увлекательный геймплей превратят ваше времяпрепровождение в настоящее приключение.
Oscarnup · July 31, 2023 at 6:56 pm
https://www.bowmania.ru/forum/go.php?url=aHR0cHM6Ly9raWxsYXBvZHMuZXUv
ClarkPaf · July 31, 2023 at 7:25 pm
https://telegra.ph/MEGAWIN-07-31
Exploring MEGAWIN Casino: A Premier Online Gaming Experience
Introduction
In the rapidly evolving world of online casinos, MEGAWIN stands out as a prominent player, offering a top-notch gaming experience to players worldwide. Boasting an impressive collection of games, generous promotions, and a user-friendly platform, MEGAWIN has gained a reputation as a reliable and entertaining online casino destination. In this article, we will delve into the key features that make MEGAWIN Casino a popular choice among gamers.
Game Variety and Software Providers
One of the cornerstones of MEGAWIN’s success is its vast and diverse game library. Catering to the preferences of different players, the casino hosts an array of slots, table games, live dealer games, and more. Whether you’re a fan of classic slots or modern video slots with immersive themes and captivating visuals, MEGAWIN has something to offer.
To deliver such a vast selection of games, the casino collaborates with some of the most renowned software providers in the industry. Partnerships with companies like Microgaming, NetEnt, Playtech, and Evolution Gaming ensure that players can enjoy high-quality, fair, and engaging gameplay.
User-Friendly Interface
Navigating through MEGAWIN’s website is a breeze, even for those new to online casinos. The user-friendly interface is designed to provide a seamless gaming experience. The website’s layout is intuitive, making it easy to find your favorite games, access promotions, and manage your account.
Additionally, MEGAWIN Casino ensures that its platform is optimized for both desktop and mobile devices. This means players can enjoy their favorite games on the go, without sacrificing the quality of gameplay.
Security and Fair Play
A crucial aspect of any reputable online casino is ensuring the safety and security of its players. MEGAWIN takes this responsibility seriously and employs the latest SSL encryption technology to protect sensitive data and financial transactions. Players can rest assured that their personal information remains confidential and secure.
Furthermore, MEGAWIN operates with a valid gambling license from a respected regulatory authority, which ensures that the casino adheres to strict standards of fairness and transparency. The games’ outcomes are determined by a certified random number generator (RNG), guaranteeing fair play for all users.
advokat_viess · July 31, 2023 at 7:33 pm
адвокаты в Днепре
Charlesclifs · July 31, 2023 at 7:46 pm
Ищете надежное казино с отличным выбором игр? Загляните на сайт Гама Казино и наслаждайтесь высококачественным игровым опытом, поддержкой 24/7 и моментальными выплатами
Гама Казино официальный сайт
HaroldLem · July 31, 2023 at 7:47 pm
купить квартиру в нижнем новгороде
Charleybag · July 31, 2023 at 7:59 pm
pokerdom apk скачать
онлайн казино покердом
Что делает PokerDom Casino особенным? Во-первых, у нас вы найдете только лицензионные автоматы от ведущих разработчиков игрных приложений. Это означает, что вы можете быть уверены в честности и надежности каждой игры. Во-вторых, мы предлагаем регулярные акции и бонусы, которые помогут вам увеличить свои шансы на выигрыш. Наша команда постоянно работает над созданием интересных и выгодных предложений для наших игроков.Покердом Казино – ваш путь к захватывающему миру онлайн-игр и шансам на большие выигрыши! Если вы ищете официальный сайт, где можно скачать и играть в слоты на реальные деньги, то PokerDom Casino – ваш лучший выбор. Здесь вы найдете клиент на ПК, который позволит вам насладиться самыми популярными лицензионными автоматами прямо у себя дома.
JamesAcari · July 31, 2023 at 7:59 pm
онлайн казино покердом
https://hecon-offroad-events.de/index.php/component/k2/item/3-impressum?start=21210
Безопасность и конфиденциальность наших игроков ? наш главный приоритет. Мы гарантируем полную защиту данных каждого пользователя нашего казино, чтобы вы могли сосредоточиться исключительно на игре и ощущениях от нее. Вы можете быть уверены в честности проведения игр, ведь PokerDom Casino работает только с лицензированными провайдерами слотов.Играя на реальные деньги, вы ощутите настоящий адреналин и волнение, которое дарит только азарт. На PokerDom Casino представлены разнообразные варианты ставок, чтобы каждый мог выбрать размер, соответствующий его предпочтениям. Это место, где мечты сбываются, а фортуна всегда на вашей стороне.
Oscarnup · July 31, 2023 at 8:03 pm
https://lights-room.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
StevenLib · July 31, 2023 at 8:14 pm
pokerdom скачать на андроид
pokerdom
Что касается разнообразия игр, PokerDom Casino гордится своим богатым выбором лицензионных автоматов, от классических до современных слотов. Вы встретите здесь такие культовые игры, которые будут знакомы всем поклонникам азартных развлечений, а также редкие синонимы этих игр, которые станут настоящими открытиями для вас. Наша команда постоянно обновляет ассортимент, чтобы удовлетворить желания самых требовательных игроков.Слоты на реальные деньги ? это не только увлекательное времяпровождение, но и реальный шанс улучшить свое финансовое положение. PokerDom Casino заботится о своих игроках, предоставляя честные условия игры и высокий уровень защиты данных. Ваши личные сведения и финансовые транзакции находятся под надежной защитой, чтобы вы могли сосредоточиться на игре и ни о чем не беспокоиться.
RobertJag · July 31, 2023 at 8:28 pm
покердом клиент на андроид
покердом казино
Выбор игр у нас огромен – от классических слотов до уникальных, редких синонимов игр. Вас ждут яркие приключения с волшебниками и феями, захватывающие сражения с древними драконами и бесконечные сокровища древних цивилизаций. Выбирайте любимые автоматы и погрузитесь в мир невероятных возможностей.Наша команда профессионалов всегда готова помочь вам в решении любых вопросов или возникших проблем. Служба поддержки работает круглосуточно и готова ответить на ваши запросы в любое время дня и ночи.
HectorMak · July 31, 2023 at 8:46 pm
Cheers. Plenty of knowledge.
oxbridge personal statement writing service writing a college admission essay last minute essay writing service
Oscarnup · July 31, 2023 at 9:12 pm
http://alim.mediu.edu.my/calendar/set.php?return=http%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F&var=showglobal">Huge
HaroldLem · July 31, 2023 at 9:36 pm
районы недорого купить квартиру
JamesAcari · July 31, 2023 at 9:50 pm
сайт покердом
http://www.kosmetichka.ru/kosmoforum/viewtopic.php?f=37&t=11917
Чтобы насладиться азартом на полную катушку, вам предоставляется возможность скачать клиент PokerDom на свой ПК. Это обеспечит более стабильный доступ к нашим играм, богатый функционал и более высокое качество графики. Клиент на ПК – это надежный спутник каждого истинного ценителя азартных развлечений.Добро пожаловать в увлекательный мир азартных развлечений с официальным сайтом PokerDom Casino! Если вы ищете место, где можно скачать и играть онлайн в захватывающие слоты на реальные деньги, вы попали точно по адресу. Покердом Казино предоставляет вам уникальную возможность окунуться в потрясающий мир азартных игр прямо на вашем компьютере с помощью клиента для ПК. А главное, здесь вас ждут только лицензионные автоматы, что гарантирует честность и надежность игрового процесса.
Charleybag · July 31, 2023 at 9:53 pm
скачать клиент покердом на андроид
онлайн казино покердом
Не упустите свой шанс на выигрыш и адреналин! Посетите официальный сайт PokerDom Casino прямо сейчас и начните играть в слоты на реальные деньги. Покердом Казино готов предложить вам море удовольствия, большие выигрыши и захватывающий игровой опыт. Не забудьте воспользоваться нашими приветственными бонусами, чтобы увеличить свой стартовый капитал. Вас ждет захватывающее путешествие в мир азарта и возможностей.PokerDom Casino – это не просто еще один игровой портал. Это уникальное место, где сходятся страсть к азартным играм и высокие шансы на выигрыш. Наш сайт предлагает вам огромный выбор слотов, в которых каждый вращение барабанов может принести вам огромные дивиденды. Играйте в самые популярные видео-слоты, классические игровые автоматы или откройте для себя новые увлекательные игры – выбор за вами.
Oscarnup · July 31, 2023 at 10:20 pm
https://www.mirkorma.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/
Quintinenemn · July 31, 2023 at 10:21 pm
Прогон хрумером сайта
StevenLib · July 31, 2023 at 10:31 pm
pokerdom скачать клиент на андроид
онлайн казино покердом
С первых минут на нашем официальном сайте вы почувствуете особую атмосферу азарта и адреналина. Наш дизайн выполнен с любовью к деталям, чтобы обеспечить вам максимально комфортное взаимодействие с нашими играми. Легкая навигация и интуитивно понятный интерфейс позволят сосредоточиться на игре, а не на поиске нужных кнопок.Погрузитесь в захватывающий мир азартных развлечений с PokerDom Casino ? лидером среди онлайн-казино! Если вы ищете надежную платформу для игры в слоты на реальные деньги, то ваш поиск завершен. PokerDom Casino предлагает множество вариантов развлечений и шансов выигрыша, которые оставят вас околдованными и заставят вернуться снова и снова.
HaroldLem · July 31, 2023 at 11:00 pm
купить 1 квартиру вторичка недорого
RobertJag · July 31, 2023 at 11:26 pm
pokerdom mobile скачать андроид
pokerdom
Не упустите свой шанс окунуться в мир удивительных возможностей вместе с PokerDom Casino. Скачайте клиент на ПК прямо сейчас, зарегистрируйтесь на официальном сайте и начните свое захватывающее путешествие в мир азарта и богатства! Приготовьтесь к захватывающим приключениям, потому что PokerDom Casino ждет именно вас!PokerDom Casino ? ваш путь к азартным победам и ярким приключениям! Начните свою игру прямо сейчас и дайте фору удаче в схватке на ставках!
Oscarnup · July 31, 2023 at 11:28 pm
https://zoloto-1.com/bitrix/redirect.php?goto=https://killapods.eu/
smartremstroy.ru · July 31, 2023 at 11:32 pm
Great blog you’ve got here.. It’s hard to find good quality writing like yours these days. I seriously appreciate people like you! Take care!!
JamesAcari · July 31, 2023 at 11:36 pm
покердом казино
http://yabsyon.com/viewthread.php?tid=131520&extra
Чтобы насладиться азартом на полную катушку, вам предоставляется возможность скачать клиент PokerDom на свой ПК. Это обеспечит более стабильный доступ к нашим играм, богатый функционал и более высокое качество графики. Клиент на ПК – это надежный спутник каждого истинного ценителя азартных развлечений.Играя на реальные деньги, вы ощутите настоящий адреналин и волнение, которое дарит только азарт. На PokerDom Casino представлены разнообразные варианты ставок, чтобы каждый мог выбрать размер, соответствующий его предпочтениям. Это место, где мечты сбываются, а фортуна всегда на вашей стороне.
BoecVarefinnagt · July 31, 2023 at 11:43 pm
У нас всегда можете быстро [url=https://skachat-minecraft.store/]скачать Майнкрафт[/url].
generic tadalafil · July 31, 2023 at 11:44 pm
canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Charleybag · July 31, 2023 at 11:45 pm
скачать покердом на андроид
pokerdom
PokerDom Casino – это не просто еще один игровой портал. Это уникальное место, где сходятся страсть к азартным играм и высокие шансы на выигрыш. Наш сайт предлагает вам огромный выбор слотов, в которых каждый вращение барабанов может принести вам огромные дивиденды. Играйте в самые популярные видео-слоты, классические игровые автоматы или откройте для себя новые увлекательные игры – выбор за вами.Покердом Казино – ваш путь к захватывающему миру онлайн-игр и шансам на большие выигрыши! Если вы ищете официальный сайт, где можно скачать и играть в слоты на реальные деньги, то PokerDom Casino – ваш лучший выбор. Здесь вы найдете клиент на ПК, который позволит вам насладиться самыми популярными лицензионными автоматами прямо у себя дома.
etrgoBor · August 1, 2023 at 12:08 am
На сайте https://tdalmaz.ru/ вы сможете заказать переходники и адаптеры для самых разных видов сверлильных станков, алмазных коронок. Вы можете узнать все подробности об интересующем оборудовании. Есть раздел с товарами, которые рекомендует администрация сайта. Регулярно проходят акции, которые помогают сделать покупку более выгодной и купить все, что нужно по доступной стоимости. Имеются хиты продаж, которые выбирает большинство. Регулярно на сайте публикуются новости, которые заинтересуют каждого.
HaroldLem · August 1, 2023 at 12:30 am
новосел агентство недвижимости
nstanvor · August 1, 2023 at 12:34 am
На сайте https://kurziki.ru/ вы сможете прямо сейчас заказать вкусную, ароматную выпечку, а также дагестанские курзе, которые славятся своим утонченным и изысканным вкусом. В разделе также имеются и различные соленья, которые идеально подходят в качестве дополнения к различным блюдам. Вы можете выбрать курзе с луком и картофелем, с семгой, индейкой, творогом, курицей. С той целью, чтобы каждый по достоинству оценил изысканный и безупречный вкус, блюда создаются из отборных, качественных продуктов.
Oscarnup · August 1, 2023 at 12:35 am
https://prokopevsk.websender.ru:443/redirect.php?url=https://killapods.eu/product-category/nicopods/pablo-snus/
StevenLib · August 1, 2023 at 12:42 am
pokerdom сайт
онлайн казино покердом
Что касается разнообразия игр, PokerDom Casino гордится своим богатым выбором лицензионных автоматов, от классических до современных слотов. Вы встретите здесь такие культовые игры, которые будут знакомы всем поклонникам азартных развлечений, а также редкие синонимы этих игр, которые станут настоящими открытиями для вас. Наша команда постоянно обновляет ассортимент, чтобы удовлетворить желания самых требовательных игроков.Сделайте ваш выбор в пользу PokerDom Casino и окунитесь в захватывающий мир азартных развлечений. Наш официальный сайт ждет вашего посещения, а лицензионные автоматы готовы порадовать вас своими неожиданными возможностями. Покердом Казино на ПК дает вам свободу выбора и абсолютный контроль над процессом игры. Приготовьтесь к захватывающему путешествию в мир азарта и удачи!
Quintinenemn · August 1, 2023 at 12:52 am
заказать прогон хрумером
RobertJag · August 1, 2023 at 1:02 am
покердом регистрация
https://autokraz.biz
Играя на реальные деньги в PokerDom, вы получаете уникальную возможность участвовать в захватывающих турнирах и розыгрышах призов. Наши бонусы и акции позволят вам повысить свои шансы на победу и получить еще больше удовольствия от игры. Мы заботимся о своих игроках и всегда рады порадовать их щедрыми подарками.Добро пожаловать в увлекательный мир азартных развлечений ? PokerDom Казино! Мы рады приветствовать всех ценителей азартных игр и предлагаем вам возможность испытать свою удачу на официальном сайте PokerDom.
cialis cost · August 1, 2023 at 1:15 am
canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
เฟรมอลูมิเนียม · August 1, 2023 at 1:23 am
Hey there! I simply want to offer you a big thumbs up for your great info you have here on this post.
I will be coming back to your blog for more soon.
buy symbicort inhaler · August 1, 2023 at 1:25 am
celecoxib coupon celecoxib 200 mg without prescription how to buy celecoxib
Quintinenemn · August 1, 2023 at 1:32 am
прогон сайта
Oscarnup · August 1, 2023 at 1:42 am
http://beskuda.ucoz.ru/go?https://killapods.eu/fi/product-category/nikotiinipussit/
Website · August 1, 2023 at 1:51 am
You could certainly see your expertise in the article youu write.
Thhe sector hopes for even more passionate writers like you
who are not afraid to say how they believe. Alwys go after your heart.
Feel frse to vusit my website :: Website
cyrogsix · August 1, 2023 at 1:54 am
Искал ответ на вопрос как сделать квартиру по фен-шуй – нашёл на портале Тайные силы https://x-sila.ru подробный ответ. Очень рекомендую! x-sila. Там экспертные статьи по фен-шуй с очень понятными объяснениями. Ещё раздел с духовными практиками зашёл и крутые онлайн гадания. Магией и ритуалами не интересуюсь, но на Тайных силах есть раздел такой. Ради интереса глянул – годно! Портал у меня в закладках, хожу постоянно. Статьи интересные выходят. Забирайте в закладки и пользуйтесь.
Quintinenemn · August 1, 2023 at 1:54 am
прогон по форумам
HaroldLem · August 1, 2023 at 2:02 am
агентство недвижимости тула
junk car without title · August 1, 2023 at 2:30 am
My family all the time say that I am wasting my time here
at net, except I know I am getting experience daily by reading such nice posts.
Here is my web-site junk car without title
Oscarnup · August 1, 2023 at 2:47 am
https://www.lingvo-svoboda.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
HaroldLem · August 1, 2023 at 3:28 am
купить квартиру ул нижняя
Oscarnup · August 1, 2023 at 3:56 am
https://rutracker.net/forum/out.php?url=https://killapods.eu/product-category/nicopods/pablo-snus/
genadJoype · August 1, 2023 at 4:26 am
Сайт https://03ekb.ru/news/kak_rabotaet_teplovoy_nasos.html это Промокод 1xBet на сегодня. 1xBet Промокод Казино это актуальные бонусы в казино 1xBet на сегодняшний день: бездепозитные за регистрацию, промокоды, фриспины и другие акции 1xBet. Проверенные бонусы в казино в 1xBet – бездепозитные за регистрацию, фриспины, актуальные коды и промокоды на 1хБет.
HaroldLem · August 1, 2023 at 4:45 am
авито ростовская область недвижимость продажа
eniytuDit · August 1, 2023 at 4:47 am
На сайте https://krasnyj-muhomor.ru/ закажите красные сушеные мухоморы, которые были собраны в Ленинградской области и в экологически чистом районе. Интернет-магазин всегда устраивает скидки, для вас действуют акции, которые помогут сделать приобретение более выгодным. Мухоморы свежие и премиального качества, а потому принесут только пользу. Заказывайте продукцию по справедливой стоимости. Доступна как доставка, так и самовывоз. Почитайте отзывы тех, кто уже приобрел продукцию и остался ей доволен.
Jamesstork · August 1, 2023 at 4:56 am
pokerdom
https://www.nutrasiluet.com.mx/contacto/health-tips/quick-vegan-dinner-with-tomato-sauce/
Каждый ход, каждая ставка, каждый выигрыш в PokerDom Casino — это результат вашего мастерства и удачи. Здесь каждый может стать счастливым обладателем большого выигрыша и ощутить вкус победы. Покердом Казино открыт для всех, кто ищет приключения и незабываемые моменты.Надежность и безопасность ? вот то, что отличает PokerDom Casino от множества других казино. Лицензионные автоматы, сертифицированные производители программного обеспечения и постоянный контроль честности игры обеспечивают справедливость и надежность каждого вашего ставки. Покердом Казино заботится о своих клиентах и гарантирует, что все происходящее на сайте — это результат случайных чисел, исключая любую возможность манипуляций.
WilliamUndog · August 1, 2023 at 5:04 am
скачать покердом на android
https://forum.bn.ru/index.php?showtopic=73938
Чтобы начать играть на официальном сайте Покердома, вам необходимо скачать и установить клиент на ваш ПК. Это быстро и бесплатно, и вы сможете наслаждаться всеми возможностями игрового портала в полной мере. Удобный и интуитивно понятный интерфейс клиента позволит вам легко ориентироваться и наслаждаться игровым процессом.Не откладывайте свою удачу на потом! Загляните на официальный сайт Покердома, скачайте клиент на свой ПК и начните играть прямо сейчас. Покердом Казино ждет вас со своими увлекательными играми и щедрыми бонусами. Покажите всем свое мастерство и докажите, что вы настоящий покерный гений!
Oscarnup · August 1, 2023 at 5:05 am
http://alt1.toolbarqueries.google.vu/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
Huntergix · August 1, 2023 at 5:14 am
скачать покердом бесплатно на телефон
сайт покердом
Волнующая атмосфера и множество возможностей сделать ваш игровой опыт настоящим приключением. С PokerDom Casino каждый спин приносит новые эмоции, и вы почувствуете, как адреналин переполняет ваше тело, когда символы выстраиваются в выигрышные комбинации. Приготовьтесь к захватывающему путешествию по миру азартных развлечений, где удача станет вашей самой верной спутницей.Что делает PokerDom Casino особенным? Во-первых, это великолепный выбор лицензионных автоматов от лучших разработчиков игр, таких как “Fortune’s Reel” или “Money Rain,” которые погружают вас в атмосферу азартного мира, наполненного сокровищами и неожиданными приключениями. Во-вторых, высокая надежность и безопасность сайта обеспечивают защиту ваших данных и финансовых транзакций на высшем уровне, что особенно важно во время онлайн-развлечений.
TerencePap · August 1, 2023 at 5:28 am
покердом приложение
pokerdom
Покердом Казино ? твой путь к захватывающему миру азарта и возможностей! Если ты ищешь официальный сайт с лицензионными автоматами, где можно скачать клиент на ПК и играть онлайн в слоты на реальные деньги, тогда твой выбор явно однозначен ? PokerDom Casino!Когда дело касается адреналина и захватывающих моментов, PokerDom Casino на высоте. Это уникальное виртуальное казино предлагает неповторимую атмосферу игры, в которую ты окунешься с головой. Кристально ясный дизайн сайта создан специально для того, чтобы ты мог сосредоточиться и полностью погрузиться в мир азарта.
https://www.yida-design.tw · August 1, 2023 at 5:44 am
Hello there! This blog post couldn’t be written any better!
Looking through this post reminds me of my previous roommate!
He continually kept preaching about this. I most certainly will forward
this post to him. Pretty sure he’s going to have a good read.
Many thanks for sharing!
Oscarnup · August 1, 2023 at 6:09 am
http://www.google.gr/url?sr=1&ct2=el_gr/3_0_s_0_1_a&sa=t&usg=AFQjCNGZVAa-UdskP9rApxuB2THcuZYbYw&cid=52779090905638&url=https://killapods.eu/
HaroldLem · August 1, 2023 at 6:09 am
купить квартиру в домодедово
tadalafil price · August 1, 2023 at 6:15 am
canadian drugs without prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
ilyaisrchova · August 1, 2023 at 6:18 am
Sur le site https://voyage10.fr/ vous trouverez des informations utiles et intéressantes sur Paris et les villes proches, sur les road trips en France et des conseils utiles pour différentes régions du pays. Voyage10 est le guide complet de Paris. Vous pouvez également lire des informations intéressantes sur les villes d’Italie, d’Espagne, de Belgique et d’autres pays.
jun88 · August 1, 2023 at 6:20 am
I read this post fully about the comparison of latest and previous technologies, it’s amazing article.
Jamesstork · August 1, 2023 at 6:40 am
покердом казино
http://www.park-freestyle.ru/Blogs/page/33/
Каждый ход, каждая ставка, каждый выигрыш в PokerDom Casino — это результат вашего мастерства и удачи. Здесь каждый может стать счастливым обладателем большого выигрыша и ощутить вкус победы. Покердом Казино открыт для всех, кто ищет приключения и незабываемые моменты.Надежность и безопасность ? вот то, что отличает PokerDom Casino от множества других казино. Лицензионные автоматы, сертифицированные производители программного обеспечения и постоянный контроль честности игры обеспечивают справедливость и надежность каждого вашего ставки. Покердом Казино заботится о своих клиентах и гарантирует, что все происходящее на сайте — это результат случайных чисел, исключая любую возможность манипуляций.
WilliamUndog · August 1, 2023 at 6:51 am
покердом клиент на андроид
https://rockufa.ru/forum/index.php?action=profile;area=summary;u=159632
Покердом – это известный и увлекательный игровой портал, который предоставляет возможность играть в покер и другие азартные игры онлайн на реальные деньги. Если вы ищете надежное и удобное место для своих азартных развлечений, Покердом Казино – идеальный выбор для вас.Чтобы начать играть на официальном сайте Покердома, вам необходимо скачать и установить клиент на ваш ПК. Это быстро и бесплатно, и вы сможете наслаждаться всеми возможностями игрового портала в полной мере. Удобный и интуитивно понятный интерфейс клиента позволит вам легко ориентироваться и наслаждаться игровым процессом.
Oscarnup · August 1, 2023 at 7:12 am
http://shop2.chuukr.cafe24.com/member/login.html?noMemberOrder=&returnUrl=https%3a%2f%2fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
Huntergix · August 1, 2023 at 7:30 am
pokerdom скачать
сайт покердом
PokerDom Casino ? это не просто интернет-казино, это настоящий мир соблазна и удачи, где каждый игрок становится участником захватывающих игр, а виртуальные автоматы оживают, словно настоящие механизмы удачи. Ощутите адреналин, который заставляет сердце биться чаще, когда вы тянете рычаг слота или делаете ставку в покере.Не упустите возможность стать частью легендарного PokerDom Casino. Скачайте клиент на ПК прямо сейчас и окунитесь в увлекательный мир слотов на реальные деньги. Вас ждут волнующие сражения за джекпоты и множество призов, которые украсят вашу жизнь яркими красками азарта и удачи. Приготовьтесь к победам, ведь PokerDom Casino всегда верит в успех своих игроков и открывает перед вами неограниченные возможности выигрыша!
Oscarnup · August 1, 2023 at 8:17 am
https://ads.haberler.com/redir.asp?EncodeUrl=aHR0cHM6Ly9raWxsYXBvZHMuZXUvcHJvZHVjdC1jYXRlZ29yeS9kaXNwb3NhYmxlLXZhcGVzLw==
Jamesstork · August 1, 2023 at 8:17 am
покердом
http://pa-lubuklinggau.go.id/index.php/component/k2/item/7-audiojungle-comes-to-life?start=190
Если же вы предпочитаете играть без скачивания программного обеспечения, то на сайте PokerDom Казино доступна возможность играть онлайн в слоты на реальные деньги без ограничений. Вам не придется ждать, просто выберите свою любимую игру и начинайте путь к большим выигрышам прямо сейчас.Забудьте обо всем, что вы знали об онлайн-казино раньше, ведь PokerDom Casino — это новое слово в мире азартных игр. Насладитесь высочайшим качеством игр, обновлениями и бонусами, которые поразят ваше воображение. Уникальные азартные события и эксклюзивные предложения ждут вас каждый день.
TerencePap · August 1, 2023 at 8:31 am
покердом скачать приложение
покердом
Покердом Казино ? твой путь к захватывающему миру азарта и возможностей! Если ты ищешь официальный сайт с лицензионными автоматами, где можно скачать клиент на ПК и играть онлайн в слоты на реальные деньги, тогда твой выбор явно однозначен ? PokerDom Casino!Но помни, настоящий успех приходит к тем, кто смело делает ставки и держит руку на пульсе. Покердом Казино предоставляет множество вариантов для внесения депозита и вывода средств ? тебе остается лишь выбрать наиболее удобный.
WilliamUndog · August 1, 2023 at 8:35 am
покердом официальный для андроид
https://club4x4.ru/forum/viewtopic.php?t=83346
Покердом Казино – ваш путь к богатству и признанию. Ваша игровая судьба начинается прямо сейчас. Скачайте клиент Покердома на свой ПК бесплатно, зарегистрируйтесь на официальном сайте и окунитесь в мир невероятных возможностей и больших побед!Не упустите возможность окунуться в мир азарта и выигрышей. Покердом Казино – ваш путь к успеху и большим денежным призам. Здесь каждый может стать победителем и осуществить свои самые смелые мечты. Доверьте свою удачу Покердому и вы непременно достигнете своих целей!
Willienum · August 1, 2023 at 8:55 am
онлайн казино покердом
https://www.vladmines.dn.ua/forum/index.php/topic,23224.0.html
PokerDom Casino гордится своей репутацией надежного и щедрого казино. Он предоставляет честную игру с генератором случайных чисел, который гарантирует честность каждого спина в слотах. Все автоматы имеют лицензию и тщательно проверяются на предмет соответствия стандартам индустрии. Здесь вы можете быть уверены в том, что ваша игра всегда будет абсолютно честной.Одним из преимуществ PokerDom Casino является его удобный и интуитивно понятный интерфейс. Вы легко найдете свои любимые игры и быстро освоите все функции казино, даже если вы новичок в азартном мире. Кроме того, здесь всегда доступна круглосуточная поддержка клиентов, готовая помочь вам в любое время суток.
RomaBzex · August 1, 2023 at 9:13 am
покердом вход
http://arstech.ru/support/forum/view_profile.php?UID=222982
Чтобы начать играть, вам необходимо пройти простую регистрацию на официальном сайте PokerDom Casino. После этого вы можете скачать клиент на свой компьютер и наслаждаться игрой в любое удобное для вас время. Мы гарантируем удобство и плавность работы клиента, чтобы вы могли полностью погрузиться в игровой процесс.PokerDom Casino обеспечивает превосходное игровое окружение и безопасность для всех игроков. Мы используем передовые технологии, чтобы защитить ваши личные данные и обеспечить честность игрового процесса. У нас есть сертификаты, подтверждающие нашу надежность и репутацию, что делает нас одним из лучших онлайн-казино в сфере азартных игр.
dimirkvon · August 1, 2023 at 9:15 am
На сайте https://chiangmaihotels.info вы сможете получить всю необходимую, исчерпывающую и содержательную информацию, которая касается отелей Чианг. Это крупная провинция, а потому отели расположены в самых разных областях. Если и вы находитесь в поисках подходящего варианта, то отсортируйте предложения по качеству, названию отеля, а также стоимости. Все отели сопровождаются кратким описанием, есть фотография для наглядности, а также расценки. Это позволит оперативно сориентироваться в выборе.
Huntergix · August 1, 2023 at 9:45 am
скачать покердом на телефон с официального сайта
покердом казино
PokerDom Casino ? это не просто интернет-казино, это настоящий мир соблазна и удачи, где каждый игрок становится участником захватывающих игр, а виртуальные автоматы оживают, словно настоящие механизмы удачи. Ощутите адреналин, который заставляет сердце биться чаще, когда вы тянете рычаг слота или делаете ставку в покере.Игра в онлайн-слоты стала великолепным сочетанием комфорта домашнего дивана и атмосферы настоящего казино. У нас вы найдете лучшие игровые автоматы от ведущих разработчиков, предоставляющих уникальный геймплей и невероятные призовые возможности. Будьте уверены, каждый автомат тщательно проверен на честность, чтобы ваш опыт был максимально увлекательным и прозрачным.
how much does it cost to start a payment processing company · August 1, 2023 at 9:51 am
Nice blog! Is your theme custom made or did you download it from somewhere?
A theme like yours with a few simple adjustements would really make
my blog jump out. Please let me know where you got your theme.
Many thanks
Oscarnup · August 1, 2023 at 10:35 am
https://kaida-fish.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Willienum · August 1, 2023 at 10:35 am
онлайн казино покердом
http://www.kabriolety.com/hlavni.php/eshop/hlavni.php?stranka=sifry/sifra.php&sifra=203
Одним из преимуществ PokerDom Casino является его удобный и интуитивно понятный интерфейс. Вы легко найдете свои любимые игры и быстро освоите все функции казино, даже если вы новичок в азартном мире. Кроме того, здесь всегда доступна круглосуточная поддержка клиентов, готовая помочь вам в любое время суток.Теперь вы понимаете, что PokerDom ? это не просто казино, это целый мир удовольствия, драйва и счастья. Присоединяйтесь к сотням тысяч довольных клиентов PokerDom Casino и окунитесь в атмосферу непревзойденного азарта и удачи. Скачайте клиент на ПК или играйте онлайн прямо сейчас и откройте для себя захватывающий мир лучших лицензионных автоматов.
KenethGesse · August 1, 2023 at 10:54 am
покердом зеркало
https://edumandriva.ru
PokerDom Casino ? это не просто интернет-казино, это настоящий мир соблазна и удачи, где каждый игрок становится участником захватывающих игр, а виртуальные автоматы оживают, словно настоящие механизмы удачи. Ощутите адреналин, который заставляет сердце биться чаще, когда вы тянете рычаг слота или делаете ставку в покере.Загрузив клиент PokerDom на свой ПК, вы откроете для себя мир увлекательных игр и захватывающих призов. Испытайте удачу на лицензионных автоматах, которые удивят вас своими функциями и графикой. Станьте частью большого игрового сообщества, где каждый может стать настоящим победителем.
RomaBzex · August 1, 2023 at 10:58 am
покердом мобильная версия скачать
http://www.rusgoroda.ru/member.php?u=103216
Не упустите шанс почувствовать драйв настоящих азартных игр и побороться за выигрыш. Покердом Казино и PokerDom Casino готовы предложить вам незабываемые эмоции и неповторимый игровой опыт. Зайдите на наш официальный сайт, скачайте клиент на ПК и начинайте играть уже сегодня. Удачи вам за игровыми столами PokerDom Casino!Покердом Казино – платформа, предлагающая азартное развлечение высшего класса для любителей покера и азартных игр. Если вы ищете официальный сайт, где можно скачать и играть онлайн на реальные деньги, то PokerDom Casino является надежным выбором. Вам необходимо просто осуществить вход на сайт или установить клиент на ПК, и затем вы окунетесь в захватывающий мир покера с возможностью выиграть крупные суммы денег.
TerencePap · August 1, 2023 at 11:11 am
покердом вход в личный кабинет
https://fullref.ru
Так что, если вы ищете надежное онлайн казино с увлекательными слотами на реальные деньги, лицензионными автоматами и необычными азартными развлечениями, PokerDom Casino ? идеальный выбор для вас. Скачайте клиент на ПК, зарегистрируйтесь на официальном сайте и погрузитесь в захватывающий мир азарта уже сегодня. Вас ждут увлекательные приключения, волнение победы и незабываемые эмоции на страницах PokerDom Casino.Не жди момента, действуй прямо сейчас! Покердом Казино ждет тебя с распростертыми объятиями. Вступай в нашу игровую команду, стань частью большой и дружной семьи победителей. Удача улыбнется именно тебе на PokerDom!
geniyclido · August 1, 2023 at 11:35 am
Introducing TextAdviser https://textadviser.com/ Your ultimate online writing assistant! Perfect your writing in multiple languages – English, Spanish, Portuguese, Italian, French, and German. Our advanced tool checks grammar, spelling, and punctuation, ensuring flawless, professional documents. Say goodbye to language barriers and confidently craft impactful content with TextAdviser by your side. Try it now and experience the joy of seamless writing!
yborka_Nuh · August 1, 2023 at 11:37 am
клининг колонина https://srochnaya-yborka.ru/
Oscarnup · August 1, 2023 at 11:43 am
https://clients1.google.lu/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
Willienum · August 1, 2023 at 12:11 pm
сайт покердом
http://auto-file.org/member.php?action=profile&uid=532173
Надежность и безопасность ? вот то, что отличает PokerDom Casino от множества других казино. Лицензионные автоматы, сертифицированные производители программного обеспечения и постоянный контроль честности игры обеспечивают справедливость и надежность каждого вашего ставки. Покердом Казино заботится о своих клиентах и гарантирует, что все происходящее на сайте — это результат случайных чисел, исключая любую возможность манипуляций.PokerDom Casino гордится своей репутацией надежного и щедрого казино. Он предоставляет честную игру с генератором случайных чисел, который гарантирует честность каждого спина в слотах. Все автоматы имеют лицензию и тщательно проверяются на предмет соответствия стандартам индустрии. Здесь вы можете быть уверены в том, что ваша игра всегда будет абсолютно честной.
pastutam · August 1, 2023 at 12:12 pm
На сайте https://msarh.ru/ воспользуйтесь такой востребованной услугой, как проектирование домов по Москве и области. Прямо сейчас вы сможете получить подробную и профессиональную консультацию. Компания отличается огромным опытом работы, предлагает воспользоваться всем комплексом проектных услуг. Любой проект, несмотря на его сложность, будет гарантированно реализован и с учетом ваших предпочтений. Компания практикует индивидуальный и профессиональный подход. Особое внимание уделяется деталям.
Ethel · August 1, 2023 at 12:29 pm
Cheers! Helpful information!
Stop by my blog – https://socialoasis.wiki/socialoasis-faq
Edwardjug · August 1, 2023 at 12:36 pm
покердом апк
онлайн казино покердом
Но помни, настоящий успех приходит к тем, кто смело делает ставки и держит руку на пульсе. Покердом Казино предоставляет множество вариантов для внесения депозита и вывода средств ? тебе остается лишь выбрать наиболее удобный.Что делает PokerDom Casino еще более привлекательным? Конечно же, щедрые бонусы и акции, которые позволяют увеличить свой банкролл и продлить игровой сеанс. Наше казино заботится о своих игроках, предоставляя им максимум удовольствия и возможностей для выигрыша.
HermanGop · August 1, 2023 at 12:41 pm
покердом
https://forum.gg-gamer.net/profile.php?id=191356
Не стоит забывать, что PokerDom Casino также доступен на мобильных устройствах. Вы можете играть в любимые слоты и покер везде, где есть интернет. Это отличное решение для тех, кто любит азарт и хочет иметь доступ к своим любимым играм в любое время и в любом месте.Каждый ход, каждая ставка, каждый выигрыш в PokerDom Casino — это результат вашего мастерства и удачи. Здесь каждый может стать счастливым обладателем большого выигрыша и ощутить вкус победы. Покердом Казино открыт для всех, кто ищет приключения и незабываемые моменты.
RomaBzex · August 1, 2023 at 12:42 pm
покердом официальный сайт скачать на андроид
https://www.morepc.ru/phpBB/viewtopic.php?p=28405
PokerDom Casino – это не просто онлайн-казино, это место, где вы можете испытать свою удачу и сорвать крупный куш. Мы предлагаем щедрые бонусы и акции, которые позволят вам увеличить свой банкролл и повысить шансы на победу. Возможно, именно вы станете следующим миллионером благодаря нашему казино.Чтобы начать играть, вам необходимо пройти простую регистрацию на официальном сайте PokerDom Casino. После этого вы можете скачать клиент на свой компьютер и наслаждаться игрой в любое удобное для вас время. Мы гарантируем удобство и плавность работы клиента, чтобы вы могли полностью погрузиться в игровой процесс.
Oscarnup · August 1, 2023 at 12:55 pm
https://msal.me/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Jamesgrope · August 1, 2023 at 1:14 pm
покердом скачать на андроид apk
http://moscovy.4adm.ru/viewtopic.php?f=23&t=15925&p=19192
Когда дело касается онлайн-казино Покердом, вы можете быть уверены, что они предлагают высокий уровень безопасности и надежности. Скачивая и устанавливая клиент на ваш ПК бесплатно, вы получаете доступ к большому разнообразию игр, предлагаемых этим казино. Неважно, новичок вы или опытный игрок, Покердом Casino предлагает вам множество возможностей для получения незабываемых впечатлений и реальных денежных выигрышей.Чтобы войти на сайт Покердом, вам необходимо зарегистрироваться и создать аккаунт. Это простой процесс, который открывает перед вами двери в мир азарта и возможностей. Покердом Casino всегда рад новым игрокам, и они предлагают различные бонусы и акции, чтобы привлечь вас и помочь вам начать с хорошим стартом.
KenethGesse · August 1, 2023 at 1:17 pm
покердом официальный сайт для андроид
https://edumandriva.ru
Для тех, кто предпочитает уникальные и нестандартные решения, PokerDom Casino предлагает не только классические игры, но и редкие синонимы азартных развлечений. Почувствуйте дыхание старой Японии, погрузившись в удивительный мир японских слотов или окунитесь в магию востока с эксклюзивными автоматами в стиле “Шоги Самурай.” Неважно, для кого вы играете ? для настоящих ценителей качественного геймплея или тех, кто ищет новые ощущения ? PokerDom Casino порадует каждого!Добро пожаловать в увлекательный мир азарта и веселья на официальном сайте PokerDom Casino! Если вы ищете захватывающее развлечение и возможность выиграть реальные деньги, вы попали по адресу. PokerDom Casino предлагает вам широкий выбор лицензионных автоматов, гарантирующих честную и захватывающую игру.
sitework & land development · August 1, 2023 at 2:04 pm
Hurrah, that’s what I was searching for, what a data!
present here at this web site, thanks admin of this web site.
Oscarnup · August 1, 2023 at 2:06 pm
https://www.tolyatti.websender.ru:443/redirect.php?url=https://killapods.eu/product-category/nicopods/pablo-snus/
HermanGop · August 1, 2023 at 2:28 pm
онлайн казино покердом
https://forum.cabal.playthisgame.com/member.php?1549099-Evgenyiacor
Играя в PokerDom Казино, вы перенесетесь в уникальную атмосферу азартного мира, где каждый вращающийся барабан наполнен потрясающими возможностями и увлекательными призами. Казино PokerDom — это не просто игровая площадка, это настоящий лидер среди онлайн-казино, который ценит каждого игрока и предлагает только самые интересные и необычные игры.Не откладывайте свою удачу на потом. Присоединяйтесь к PokerDom Casino прямо сейчас и запустите волну увлекательных эмоций, захватывающих игр и, возможно, неожиданных сюрпризов. Сделайте шаг к своей мечте уже сегодня!
asiliyHet · August 1, 2023 at 2:47 pm
Сайт https://papik.pro/ это рисунки для срисовки и не только. Вы сможете найти огромную коллекцию рисунков в разных жанрах для срисовки как для начинающих, так и для профессионалов. Самая большая коллекция для срисовки только на нашем сайте.
Edwardjug · August 1, 2023 at 3:03 pm
pokerdom скачать на андроид
pokerdom
PokerDom Casino ? твой выбор для успешной игры в слоты на реальные деньги и захватывающего времяпровождения. Не жди, присоединяйся к нам прямо сейчас и окунись в мир азартных приключений вместе с PokerDom Casino!Мир азартных развлечений открывает перед тобой свои двери на PokerDom Casino, предоставляя уникальный опыт игры в слоты на реальные деньги, сопровождаемый захватывающими эмоциями и шансом на крупные выигрыши. Покердом Казино уверенно занимает ведущие позиции в онлайн-гемблинге, предлагая безупречное качество, честность и надежность.
Jamesgrope · August 1, 2023 at 3:06 pm
скачать приложение pokerdom
http://www.awkwardzombie.com/forum/viewtopic.php?f=2&t=309125&p=1597169
PokerDom Casino – это ваш путь к азартным приключениям и потрясающим выигрышам. Не упустите шанс испытать свою удачу и заработать реальные деньги в увлекательных играх, предлагаемых Покердомом. Скачайте и установите клиент на ПК бесплатно, чтобы получить максимальное удовольствие от игры. Не забудьте воспользоваться преимуществами и бонусами, предлагаемыми Покердомом Casino, чтобы увеличить свои шансы на победу.Покердом и PokerDom Casino – это ваше место для онлайн-азарта. Играйте, наслаждайтесь и выигрывайте с самым надежным и захватывающим казино в интернете. Начните свое путешествие прямо сейчас и откройте новую главу в мире азартных игр с Покердомом и его удивительным онлайн-казино.
Oscarnup · August 1, 2023 at 3:18 pm
https://lib.gjue.ac.kr/DLiWeb25/comp/search/Detail.aspx?srv=557&m_var=557&cid=116031&ref=https%3a%2f%2fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
KenethGesse · August 1, 2023 at 3:32 pm
pokerdom apk скачать
сайт покердом
PokerDom Casino ? это не просто интернет-казино, это настоящий мир соблазна и удачи, где каждый игрок становится участником захватывающих игр, а виртуальные автоматы оживают, словно настоящие механизмы удачи. Ощутите адреналин, который заставляет сердце биться чаще, когда вы тянете рычаг слота или делаете ставку в покере.Завлекательные бонусы и акции от PokerDom Casino сделают вашу игру еще более привлекательной и выгодной. Следите за обновлениями на сайте и не упускайте шанс сорвать крупный куш с дополнительными бонусами. Вас ждут фриспины, кэшбеки, призовые турниры и многое другое. PokerDom Casino ценит своих игроков и рад делиться своим богатством с каждым посетителем.
HaroldLem · August 1, 2023 at 3:49 pm
estate агентство недвижимости
HermanGop · August 1, 2023 at 4:11 pm
pokerdom
https://pprocherk.ru/memberlist.php?mode=viewprofile&u=152813
Теперь вы понимаете, что PokerDom ? это не просто казино, это целый мир удовольствия, драйва и счастья. Присоединяйтесь к сотням тысяч довольных клиентов PokerDom Casino и окунитесь в атмосферу непревзойденного азарта и удачи. Скачайте клиент на ПК или играйте онлайн прямо сейчас и откройте для себя захватывающий мир лучших лицензионных автоматов.Если же вы предпочитаете играть без скачивания программного обеспечения, то на сайте PokerDom Казино доступна возможность играть онлайн в слоты на реальные деньги без ограничений. Вам не придется ждать, просто выберите свою любимую игру и начинайте путь к большим выигрышам прямо сейчас.
HaroldLem · August 1, 2023 at 4:16 pm
агентство недвижимости донецк
Oscarnup · August 1, 2023 at 4:29 pm
https://xn—-8sbbeptbpdohfebthj2qg.xn--p1ai/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
suburban volvo · August 1, 2023 at 4:54 pm
If some one wishes expert view about running a blog afterward i recommend him/her to go to see this web site,
Keep up the fastidious work.
My homepage; suburban volvo
Jamesgrope · August 1, 2023 at 4:55 pm
покердом установить приложение
http://pub8.bravenet.com/forum/static/show.php?usernum=670451382&frmid=8407&msgid=1008849&cmd=show
Когда дело касается онлайн-казино Покердом, вы можете быть уверены, что они предлагают высокий уровень безопасности и надежности. Скачивая и устанавливая клиент на ваш ПК бесплатно, вы получаете доступ к большому разнообразию игр, предлагаемых этим казино. Неважно, новичок вы или опытный игрок, Покердом Casino предлагает вам множество возможностей для получения незабываемых впечатлений и реальных денежных выигрышей.Покердом – это официальный сайт, который предлагает вам увлекательный мир азартных игр и возможность сорвать крупный куш. На этой платформе вы можете насладиться игрой в покер и другие популярные карточные игры, испытать удачу и соревноваться с тысячами игроков со всего мира. Вам понравится, каким образом Покердом объединяет любителей азартных развлечений и предоставляет им незабываемые моменты.
HaroldLem · August 1, 2023 at 5:11 pm
купить квартиру новую вторичку
Edwardjug · August 1, 2023 at 5:19 pm
покер дом отзывы
онлайн казино покердом
Помимо широкого выбора популярных слотов, на сайте представлены также редкие синонимы азартных игр, которые придутся по вкусу ценителям оригинального контента. Ощутите адреналин от увлекательных рулеток, испытайте удачу в нестандартных карточных играх и насладитесь уникальным опытом от качественных разработок, предоставленных нашим казино.Покердом Казино ? твой путь к захватывающему миру азарта и возможностей! Если ты ищешь официальный сайт с лицензионными автоматами, где можно скачать клиент на ПК и играть онлайн в слоты на реальные деньги, тогда твой выбор явно однозначен ? PokerDom Casino!
Oscarnup · August 1, 2023 at 5:42 pm
https://www.google.com.jm/url?sa=t&url=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F
urtetsknoth · August 1, 2023 at 5:55 pm
По ссылке https://play.google.com/store/apps/details?id=com.ba11.way.app поиграйте в удивительную, захватывающую и интересную игру, которая перенесет в необычный мир, через множество галактик. Однако на пути будут постоянно встречаться астероиды. Их цель – помешать вам дойти до финала. Игра отличается разными уровнями сложности. И чем дальше вы проходите, тем интересней становится. Это ваша возможность почувствовать себя путешественником, находясь в другой Галактике.
ThomasMethy · August 1, 2023 at 6:02 pm
meet girls for free: https://datingtopreview.com/# – best free online dating websites
zuevlGag · August 1, 2023 at 6:17 pm
Visa Travel https://visafptravel.ru/ – увлекательный и познавательный сайт о путешествиях, различных направлениях, свежих новостях об отдыхе, а также возможность купить самые дешевые билеты на самолет Москва – Санкт-Петербург. Узнать расписание прямых рейсов, получить актуальную информацию о направлении все это на нашем сайте.
Korea Sports Betting · August 1, 2023 at 6:25 pm
When Korea Sports Betting
the KBO, you will run into sevewral formker MLB pitchers.
Dillonvania · August 1, 2023 at 6:28 pm
онлайн казино покердом
https://reakk.com/archives/40.html/comment-page-65
Теперь вы понимаете, что PokerDom ? это не просто казино, это целый мир удовольствия, драйва и счастья. Присоединяйтесь к сотням тысяч довольных клиентов PokerDom Casino и окунитесь в атмосферу непревзойденного азарта и удачи. Скачайте клиент на ПК или играйте онлайн прямо сейчас и откройте для себя захватывающий мир лучших лицензионных автоматов.Чтобы окунуться в увлекательный мир азарта и адреналина, необходимо скачать специальный клиент PokerDom Casino на свой ПК. Это обеспечит наивысший уровень графики и функциональности, позволит вам насладиться беззаветной атмосферой игры. К тому же, скачивание клиента занимает совсем мало времени, а установка осуществляется автоматически.
BrettDor · August 1, 2023 at 6:36 pm
покердом промокод
https://xn--80affk4afcjgu.xn--p1ai
Так что, если вы ищете надежное онлайн казино с увлекательными слотами на реальные деньги, лицензионными автоматами и необычными азартными развлечениями, PokerDom Casino ? идеальный выбор для вас. Скачайте клиент на ПК, зарегистрируйтесь на официальном сайте и погрузитесь в захватывающий мир азарта уже сегодня. Вас ждут увлекательные приключения, волнение победы и незабываемые эмоции на страницах PokerDom Casino.И это еще не все! PokerDom дарит бонусы и подарки, чтобы увеличить твои шансы на победу. С первого дня ты становишься участником эксклюзивной программы лояльности, где щедрые бонусы, фриспины и приятные сюрпризы становятся частью твоего игрового опыта.
anklnaHuche · August 1, 2023 at 6:47 pm
На сайте https://seoalex.ru/ закажите SEO продвижение сайта, а также настройку контекстной рекламы. Здесь вы сможете воспользоваться услугами частного СЕО-специалиста, продвижением сайтов, а также Яндекс Директ. Также имеются расценки на различные виды работ. Они остаются на среднем уровне, а потому воспользоваться ими смогут все, кто угодно. Частный специалист выполнил огромное количество сайтов с оптимизацией. Он нацелен на длительное сотрудничество, а потому выполняет работы на высоком уровне.
KenethGesse · August 1, 2023 at 6:49 pm
pokerdom скачать на андроид
сайт покердом
Завлекательные бонусы и акции от PokerDom Casino сделают вашу игру еще более привлекательной и выгодной. Следите за обновлениями на сайте и не упускайте шанс сорвать крупный куш с дополнительными бонусами. Вас ждут фриспины, кэшбеки, призовые турниры и многое другое. PokerDom Casino ценит своих игроков и рад делиться своим богатством с каждым посетителем.Загрузив клиент PokerDom на свой ПК, вы откроете для себя мир увлекательных игр и захватывающих призов. Испытайте удачу на лицензионных автоматах, которые удивят вас своими функциями и графикой. Станьте частью большого игрового сообщества, где каждый может стать настоящим победителем.
Oscarnup · August 1, 2023 at 6:51 pm
https://maps.google.hr/url?q=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F/
Michaelspoor · August 1, 2023 at 7:48 pm
https://webmineral.ru/upload/pages/?uzghasu__volnuushiy_zghanr_kino__kotoruy_zavorazghivaet_zriteley.html
Vincenttrome · August 1, 2023 at 7:58 pm
free meeting online asia dieting wep
meet european singles in usa
Oscarnup · August 1, 2023 at 8:01 pm
https://toolbarqueries.google.com.sa/url?q=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
Dillonvania · August 1, 2023 at 8:11 pm
покердом
https://boxing.go-kigen.jp/2019/02/10/only-woman-4/
Загрузив клиент на свой ПК, вы открываете себе доступ в захватывающий мир азартных развлечений, где вас ждут интереснейшие игры, созданные лучшими разработчиками. PokerDom Казино гарантирует честность и надежность каждой игры, а также максимально комфортные условия для своих пользователей.Добро пожаловать в увлекательный мир азарта и возможностей! PokerDom Casino предлагает вам уникальный шанс окунуться в захватывающую атмосферу азартных развлечений прямо из комфорта вашего дома. Если вы ищете официальный сайт с самыми лицензионными автоматами, а также хотите скачать клиент на ПК для игры онлайн в слоты на реальные деньги, то PokerDom ? ваш выбор!
Cat_rhymn · August 1, 2023 at 8:44 pm
https://cat-mine.ru
canadian pharmaceuticals online · August 1, 2023 at 8:51 pm
online pharmacy without a prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
BrettDor · August 1, 2023 at 8:59 pm
покердом клиент на андроид
https://xn--80affk4afcjgu.xn--p1ai
PokerDom Casino ? твой выбор для успешной игры в слоты на реальные деньги и захватывающего времяпровождения. Не жди, присоединяйся к нам прямо сейчас и окунись в мир азартных приключений вместе с PokerDom Casino!Наше казино предлагает широкий выбор лицензионных автоматов от ведущих разработчиков, что гарантирует уникальную графику, захватывающий геймплей и честные выплаты. Играй в свои любимые слоты в любое время, ведь PokerDom Casino доступен круглосуточно ? никаких ограничений, только азарт и удовольствие!
pavlosep · August 1, 2023 at 9:07 pm
На сайте https://remon.by/ вы сможете заказать: ремонт квартир домов комнат ванной сантехник электрик, работы строительные сантехнические электромонтажные штукатурные отделочные кровельные сварочные отопление водоснабжение замена труб батарей котлов, натяжные потолки, укладка плитки ламината сайдинг вагонка, перетяжка мебели дивана стульев, реставрация ванн бурение скважин, грузоперевозки клининг химчистка, муж на час, газосиликатные блоки доска брус, подключение ванны душевой мойки полотенцесушителя посудомоечной смесителя стиральной унитаза.
KenethGesse · August 1, 2023 at 9:10 pm
pokerdom скачать клиент на андроид
https://keepon-betting.ru
Покердом Казино известен своим профессионализмом и заботой о каждом клиенте. Одним из его неоспоримых преимуществ является широкий выбор лицензионных автоматов, созданных ведущими разработчиками игрового софта. Вы сможете наслаждаться непревзойденными игровыми механиками и великолепной графикой, что придаст вашему азартному опыту особый шарм.Завлекательные бонусы и акции от PokerDom Casino сделают вашу игру еще более привлекательной и выгодной. Следите за обновлениями на сайте и не упускайте шанс сорвать крупный куш с дополнительными бонусами. Вас ждут фриспины, кэшбеки, призовые турниры и многое другое. PokerDom Casino ценит своих игроков и рад делиться своим богатством с каждым посетителем.
Oscarnup · August 1, 2023 at 9:11 pm
https://www.spotrac.com/ads/adRedirect/60528453/956/?url=https://killapods.eu/product-category/disposable-vapes/
Dillonvania · August 1, 2023 at 9:47 pm
онлайн казино покердом
http://bryners.ru/forum/memberlist.php?sk=b&sd=d&first_char=w&first_char=e
Сделайте свой досуг незабываемым с PokerDom Casino! Здесь вас ждут захватывающие игры, лицензионные автоматы, бонусы и призы, а также возможность испытать удачу и выиграть крупные денежные суммы. Не упустите свой шанс, присоединяйтесь к сообществу азартных любителей и начинайте свой путь к победе прямо сейчас! PokerDom Казино ? это ваш путь к азартным волнениям и морю эмоций!Играя на реальные деньги в PokerDom Casino, вы можете быть уверены в безопасности своих средств. Надежная система защиты платежей обеспечивает сохранность ваших личных данных и денежных операций. Так что вы можете сосредоточиться на самом главном ? наслаждаться азартом и атмосферой азартной столицы прямо из уюта своего дома.
BrettDor · August 1, 2023 at 11:14 pm
скачать покердом на андроид
онлайн казино покердом
Покердом Казино ? твой путь к захватывающему миру азарта и возможностей! Если ты ищешь официальный сайт с лицензионными автоматами, где можно скачать клиент на ПК и играть онлайн в слоты на реальные деньги, тогда твой выбор явно однозначен ? PokerDom Casino!Ощути волнение азарта, побеждай в увлекательных турнирах, наслаждайся яркими сюрпризами и балуй себя роскошными выигрышами. PokerDom Casino ? твоя путеводная звезда в круговороте азартной феерии.
KenethGesse · August 1, 2023 at 11:27 pm
pokerdom android скачать
сайт покердом
Для того чтобы окунуться в мир азарта, вам потребуется скачать клиент на ПК с официального сайта PokerDom Casino. Этот процесс быстр и прост, а установив клиент, вы получите доступ к богатой коллекции самых разнообразных игровых автоматов. Не упустите шанс сорвать джекпот на захватывающих слотах, которые подарят вам незабываемые эмоции и, конечно же, реальные денежные призы.Игра в онлайн-слоты стала великолепным сочетанием комфорта домашнего дивана и атмосферы настоящего казино. У нас вы найдете лучшие игровые автоматы от ведущих разработчиков, предоставляющих уникальный геймплей и невероятные призовые возможности. Будьте уверены, каждый автомат тщательно проверен на честность, чтобы ваш опыт был максимально увлекательным и прозрачным.
Oscarnup · August 1, 2023 at 11:30 pm
http://www.museum.ru/future/lmp/link.asp?back=web/default.htm&url=https://killapods.eu/fi/product-category/nikotiinipussit/
gwinbola · August 1, 2023 at 11:57 pm
Hi there, I believe your site could be having web browser compatibility issues.
When I look at your blog in Safari, it looks fine
however, when opening in I.E., it’s got some overlapping issues.
I simply wanted to provide you with a quick heads up!
Apart from that, great blog!
당일대출 · August 2, 2023 at 12:02 am
To be able to use this app, you need too be 18 and
above to sign up.
my web site 당일대출
Michaelspoor · August 2, 2023 at 12:35 am
https://amigo-tours.ru/aZSiCMHc/pgs/zarubezghnue_serialu__epoha_zolotogo_veka_televideniya.html
Oscarnup · August 2, 2023 at 12:40 am
https://ultrakraski.ru/url?away=https://killapods.eu/fi/product-category/nikotiinipussit/
yushasip · August 2, 2023 at 1:40 am
Кадровое IT агентство https://lookingfor.agency/ это качественный подбор специалистов в сфере IT и Digital. Поможем найти профессиональные кадры. Мы специализируемся только на сегментах IT и Digital и закрываем все вакансии, а также профессионально проверяем кандидата и предлагаем вам только подготовленных специалистов. Ознакомьтесь с подробной информацией для соискателей и работодателей на сайте.
Oscarnup · August 2, 2023 at 1:47 am
https://image.google.cm/url?q=https%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fdisposable-vapes%2F/
breasts · August 2, 2023 at 2:00 am
lesbian
casino
booty
nudity
blackjack
milf
nipples
fucked
camel toe
erotica
cunt
boobies
booty
naked
poker
oral
nigger
oral
xxx
bbw
fucked
slut
pills
penis
tits
cunt
dildo
sex
bbw
playmate
fucked
nudity
nigger
breast
camel toe
milf
gambling
pharma
erotic
bbw
pussy
horny
homo
masturbation
bbw
blow job
nudity
milf
nipple
homosexual
cum
breasts
nudity
bitch
cameltoe
penis
stripping
erection
clit
fucking
nudist
masturbation
dick
clit
penis
booty
ejaculating
lesbo
schlong
titties
nigger
pr0n
titties
nipples
black jack
blackjack
nude
nude
video poker
horny
ejaculation
busty
bbw
booty
fucking
casino
titties
breast
erotic
titties
butt
lesbian
breasts
sex
booty
sex
nudist
pr0n
milfs
masturbation
heslaRiz · August 2, 2023 at 2:54 am
По ссылке https://play.google.com/store/apps/details?id=com.t0wer.jumpeeer вы сможете насладиться интересной, незаурядной и яркой игрой Tower Jumper APK, которая обрадует своей динамичностью, интересным развитием сюжета. Эта игра в полный экран и относится к категории аркад. Отличный вариант для того, чтобы необычно и весело провести вечер после работы либо в выходной день. Играйте абсолютно бесплатно и тогда, когда хочется. Это ваша возможность интересно и необычно провести время.
Oscarnup · August 2, 2023 at 2:55 am
https://zapakpp.ru:443/bitrix/click.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
laynkBib · August 2, 2023 at 3:42 am
На сайте https://fotoalt.ru/ закажите рамки для фотографий. Багетные рамки ручной работы, созданные в соответствии с индивидуальными предпочтениями, под конкретные размеры. Также здесь вы сможете заказать презентабельные фотоальбомы, презенты на различные праздники, мультирамки и многое другое. Вся продукция выполнена из качественных материалов, которые прослужат долго и не изменят изначального вида. Регулярно проходят акции, которые помогут воспользоваться услугами по меньшей стоимости.
Oscarnup · August 2, 2023 at 4:04 am
https://maps.google.com.ag/url?sa=i&source=web&rct=j&url=https://killapods.eu/fi/product-category/nikotiinipussit/
ダッチワイフ · August 2, 2023 at 4:21 am
Ridiculous quest there. What happened after?
Thanks!リアルラブドール
vavada_Gox · August 2, 2023 at 4:46 am
вавада зеркало рабочее
Oscarnup · August 2, 2023 at 5:14 am
https://www.google.lv/url?sa=t&url=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
Oscarton · August 2, 2023 at 5:17 am
сайт покердом
https://mutluhukuk.com.tr/index.php/component/k2/item/4-display-main-menu?start=8160
Покердом Казино – это не просто место для игры, это целый мир приключений и эмоций, которые вы не захотите покидать. Здесь каждый день преподносит что-то новое, а увлекательные турниры и соревнования подарят вам бесконечное азартное веселье. Взлетите на вершину успеха вместе с PokerDom Casino – вашим надежным партнером в мире азартных развлечений!PokerDom Casino — это настоящая находка для всех поклонников азартных развлечений. Здесь вас ждет целый арсенал лицензионных автоматов, предоставленных лучшими разработчиками игр. Каждый слот ? это уникальная история, и вы станете ее главным героем, испытывая адреналин и нереальные эмоции!
BrettDor · August 2, 2023 at 5:28 am
покердом приложение
https://mobilityweek.ru
Секрет успеха PokerDom Casino — в предлагаемых играх и великолепном сервисе. Сотрудничество с ведущими разработчиками позволяет предоставлять свежие новинки азартных игр, которые покоряют сердца игроков мгновенно. Это не просто слоты, это настоящие произведения искусства, где каждый вращающийся барабан — это шанс на большой выигрыш.Команда PokerDom Casino – это настоящие профессионалы своего дела, которые всегда готовы поддержать и помочь нашим игрокам. Мы предлагаем круглосуточную поддержку, где каждый ваш вопрос будет рассмотрен внимательно и профессионально.
Augustempixelm · August 2, 2023 at 5:46 am
prophylaktische antibiotika
BrettDor · August 2, 2023 at 5:56 am
pokerdom скачать на телефон
покердом казино
Казино PokerDom приветствует всех ? от новичков до опытных профессионалов. Удобный интерфейс и интуитивно понятная навигация делают игровой процесс максимально комфортным и увлекательным. Не бойся рисковать, ведь в этом казино удача благоволит смелым и решительным!PokerDom Casino – это не только слоты, здесь также можно насладиться атмосферой настоящего казино, сыграв в классические настольные игры. Рулетка, блэкджек, покер – выбор за вами! Но не забывайте о PokerDom Казино и его потрясающих турнирах. Участие в них дарит азарт и шанс сразиться с достойными соперниками.
Oscarnup · August 2, 2023 at 6:22 am
https://image.google.com.nf/url?q=https%3A%2F%2Fkillapods.eu
daachnik.ru · August 2, 2023 at 6:24 am
Quality posts is the key to invite the people to visit the web site, that’s what this web site is providing.
raginGag · August 2, 2023 at 6:34 am
Mini Travell https://minivantravel.ru/ это познавательный блог о путешествиях, интересная информация, подборки новостей. Приятным бонусом сайта будет возможность купить самые выгодные авиабилеты из Москвы в Дубай. Дешевые билеты на самолет это уникальная возможность выгодно отдохнуть, а расписание рейсов поможет вам выбрать необходимую дату.
rilltrrnLoria · August 2, 2023 at 7:05 am
Сайт http://gosmnenie.ru/ это юридический справочник, который содержит статьи и справочную информацию по огромному количеству вопросов повседневной жизни. Вы найдете множество ответов как по уголовному праву, по видам преступлений, по жизненным ситуациям. Все описано легко и доступно, что позволит любому человеку, даже без юридического образования, понять многие вещи.
Jasmine · August 2, 2023 at 7:09 am
Beneficial data Thank you!
Here is my web site: https://socialoasis.blog
Oscarnup · August 2, 2023 at 7:27 am
https://www.google.li/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
소액대출 · August 2, 2023 at 7:34 am
If you were to default on the loan, the lender could take possession of
the asset.
My site; 소액대출
Oscarnup · August 2, 2023 at 8:32 am
https://kth.ethz.ch/Shibboleth.sso/Logout?return=https://killapods.eu/fi/product-category/nikotiinipussit/
Oscarton · August 2, 2023 at 8:47 am
покердом казино
http://acopinturas.org/index.php/component/k2/item/12-sample-item-11?start=560
Скачайте клиент на ПК, чтобы насладиться полным функционалом PokerDom Casino. Теперь у вас есть возможность погрузиться в мир азарта даже без доступа в интернет. Удобство и доступность игры ? вот залог вашего успеха!Сотни ярких автоматов с призами и бонусами ждут тех, кто рискнет испытать удачу в нашем казино. А чтобы обеспечить максимально комфортный опыт, мы разработали клиент на ПК с удобным интерфейсом, позволяющим наслаждаться игрой в полном объеме. Эксклюзивные бонусы и акции для постоянных игроков станут дополнительным стимулом к долгим игровым сессиям.
BredDor · August 2, 2023 at 9:10 am
скачать покердом на android
https://iconicphotos.ru
Наша команда разработчиков исключительно талантлива, и каждый автомат в нашем казино создан с любовью и стремлением предоставить вам максимум удовольствия. Играйте в PokerDom Casino и окунитесь в удивительный мир разнообразия, где каждый спин может принести вам невероятную удачу.Не упустите свой шанс попробовать себя в роли настоящего игрока, играя на реальные деньги в лицензионных автоматах на PokerDom Казино. Мы предоставляем идеальную платформу для всех, кто стремится к увлекательному и качественному опыту. Здесь каждый найдет свое счастье и удачу.
BrettDor · August 2, 2023 at 9:12 am
pokerdom скачать клиент android
покердом
Казино PokerDom приветствует всех ? от новичков до опытных профессионалов. Удобный интерфейс и интуитивно понятная навигация делают игровой процесс максимально комфортным и увлекательным. Не бойся рисковать, ведь в этом казино удача благоволит смелым и решительным!Так что, если вы ищете надежное, честное и захватывающее казино, PokerDom Casino – ваш лучший выбор! Загрузите клиент на ПК или просто посетите официальный сайт, скачайте приложение на мобильное устройство и наслаждайтесь качественными слотами и увлекательными турнирами уже сегодня. Поклонники азарта со всего мира уже выбрали PokerDom Казино, присоединяйтесь и вы!
cheap car insurance · August 2, 2023 at 9:35 am
Everything is very open with a precise clarification of the issues.
It was truly informative. Your site is extremely helpful.
Thank you for sharing!
My homepage :: cheap car insurance
Oscarnup · August 2, 2023 at 9:42 am
https://rhinonorm.teva.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://killapods.eu/
Oscarnup · August 2, 2023 at 10:51 am
http://escueladeparterastlapa.gob.mx/__media__/js/netsoltrademark.php?d=killapods.eu
Bretthem · August 2, 2023 at 11:23 am
Представительский #a#частный эротический массаж в Перми#/a# в spa
Oscarton · August 2, 2023 at 11:37 am
покердом казино
http://www.nissan-4×4.ru/Forum/NISSAN_4x4/index.php?id=3&page=868
Погрузитесь в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Необычные ощущения, лицензионные автоматы и возможность скачать клиент на ПК для игры онлайн на реальные деньги ждут вас на каждом шагу.Что делает PokerDom Casino настолько уникальным? Мы гордимся своими лицензионными автоматами, созданными известными разработчиками. Только здесь вы найдете такое разнообразие слотов, которые понравятся даже самым требовательным игрокам. Мы не перестаем радовать наших пользователей удивительными игровыми сюрпризами и бонусами, которые увеличивают шансы на победу во много раз.
sandrbag · August 2, 2023 at 11:57 am
По ссылке https://play.google.com/store/apps/details?id=com.defeatingplanets2323 насладитесь увлекательной игрой Vulkan Vegas. Так вы добьетесь удивительных результатов и даже сможете уничтожить некоторые планеты. Приложение отличается захватывающим сюжетом, приятной музыкой, а сама игра подарит только яркие эмоции, а потому в нее захочется играть часами напролет. Игра разовьет навыки мышления, улучшит реакцию. Вы научитесь быстро принимать решение. Вас обрадует удивительная графика, а для повышения шансов на победу воспользуйтесь бонусами.
Oscarnup · August 2, 2023 at 12:00 pm
https://debesy.udmurt.ru:443/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Jamesmam · August 2, 2023 at 12:05 pm
казино онлайн россия
https://beta-doterra.myvoffice.com/Application/index.cfm?&EnrollerID=1&Theme=Default&ReturnUrl=www.football-yuga.ru
Рейтинг онлайн казино 2023 для истинных азартных путешественников, ищущих незабываемые эмоции и щедрые призы, является ключевой информацией для тех, кто стремится испытать удачу и увлекательный драйв в играх казино на реальные деньги. В океане виртуальных гэмблинг-платформ, полных необычных возможностей, девизом настоящего игрового мореплавателя становится поиск “сокровищ” среди топ лучших онлайн казино.Лучшие онлайн казино 2023 года для азартных игроков на реальные деньги – это то, о чем каждый гэмблер мечтает. Сотни заведений предлагают свои услуги, но как выбрать именно те, которые будут в верхнем рейтинге онлайн казино?
BredDor · August 2, 2023 at 12:16 pm
pokerdom скачать на андроид apk
https://iconicphotos.ru
Наша команда разработчиков исключительно талантлива, и каждый автомат в нашем казино создан с любовью и стремлением предоставить вам максимум удовольствия. Играйте в PokerDom Casino и окунитесь в удивительный мир разнообразия, где каждый спин может принести вам невероятную удачу.PokerDom Casino ? место, где сбываются мечты и счастье находит свое пристанище. Присоединяйтесь к нам и окунитесь в потрясающий мир азарта и приключений. Мы гарантируем, что вы не пожалеете о своем выборе, и ваше время с нами будет наполнено радостью и азартом.
PerryBooca · August 2, 2023 at 12:20 pm
онлайн казино покердом
https://www.solonin.org/other_viktor-volskiy-lev-senata/cmnts/2
Каждый истинный ценитель азартных игр знает, что PokerDom Казино ? это не просто интернет-платформа, это настоящий рай для любителей карточных развлечений и игровых автоматов. Здесь вы найдете великолепный выбор слотов, которые завоевали сердца тысяч игроков. На нашем сайте вас ждут разнообразные тематики и увлекательные сюжеты, которые погрузят вас в мир необычных приключений.PokerDom Casino — это настоящая находка для всех поклонников азартных развлечений. Здесь вас ждет целый арсенал лицензионных автоматов, предоставленных лучшими разработчиками игр. Каждый слот ? это уникальная история, и вы станете ее главным героем, испытывая адреналин и нереальные эмоции!
Oscarnup · August 2, 2023 at 1:10 pm
https://binomo.onelink.me/509527443?pid=BinPartner&c=directonelink&af_sub1=&af_sub2=&af_sub3=0&af_sub4=d3635fc07661&af_web_dp=https%3A%2F%2Fkillapods.eu
MattVS · August 2, 2023 at 1:11 pm
скачать клиент покердом на андроид
https://iconicphotos.ru
PokerDom Casino ? ваш путь к азартным приключениям! Насладитесь великолепными слотами, крупными выигрышами и неповторимым азартом. Доверьтесь профессионализму нашей команды и наслаждайтесь безграничными возможностями для победы.Что делает PokerDom Казино таким особенным? Во-первых, у нас представлены лицензионные автоматы от ведущих мировых разработчиков. Ведь именно качество и честность игр делает нас лидерами в индустрии азартных развлечений. Во-вторых, у нас есть специальный клиент для ПК, который обеспечивает стабильную работу и беззависимость от интернет-соединения. Это особенно актуально для настоящих ценителей азарта, которые хотят иметь постоянный доступ к своим любимым играм.
Charlesirrag · August 2, 2023 at 1:12 pm
покердом официальный
https://mobilityweek.ru
Погрузись в захватывающий мир азартных развлечений с официальным сайтом PokerDom Casino! Если ты ищешь место, где можно скачать клиент на ПК и наслаждаться игрой в слоты на реальные деньги, то твой выбор — это Покердом Казино. Здесь ты найдешь все, что нужно для уникального игрового опыта.Что делает Покердом Казино настолько привлекательным? Это не только захватывающие игры и скачиваемый клиент на ПК, но и множество других уникальных возможностей. Программа лояльности для постоянных игроков, регулярные акции и бонусы, которые удивят даже опытных азартных гурманов. Большие выигрыши и великолепные призы ждут тех, кто решит испытать удачу на PokerDom Casino.
Jamesmam · August 2, 2023 at 1:58 pm
игровые автоматы на деньги
https://quidoo.in/afrointroductions-g-nous-avertissement-sur-les/
Необходимо отметить, что в мире виртуальных игр есть свои уникальные карманные оазисы, способные предложить что-то особенное и неповторимое. Неожиданные бонусы, безумные анимации и дружелюбные дилеры – всё это делает игру в казино на реальные деньги не только выгодным, но и захватывающим приключением, которое запомнится надолго.В-третьих, прозрачность и скорость выплат. Никто не хочет ждать долгих дней, чтобы вывести свои заслуженные деньги. Ведь именно это и есть основная цель игры на реальные деньги – выиграть и насладиться своей победой.
Oscarnup · August 2, 2023 at 2:21 pm
https://www.google.com.sv/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
onkbgNeece · August 2, 2023 at 2:31 pm
На сайте https://sochigirls.info вы найдете для себя девушку для интересного, незабываемого времяпрепровождения. Перед вами только ухоженные, милые и страстные дамы, которые жаждут свидания с вами. А самое главное, что все девушки ухоженные, раскрепощенные, готовы порадовать своего кавалера отвязной интимной близостью. Напротив каждой барышни указан номер телефона, а также ее данные – вес, рост, цвет глаз, расценки за час или ночь. Есть возможность выбрать вариант в соответствии со своими предпочтениями, вкусами, финансовыми возможностями.
PerryBooca · August 2, 2023 at 2:38 pm
покердом
http://moe.prits.com/com/bbs/c_board.cgi?page=http://himscanada.com&mode=move&pass=
Если вы готовы к незабываемому опыту и хотите ощутить настоящий азарт, не откладывайте встречу с удачей на потом. PokerDom Casino ? это место, где рождаются легенды азартных приключений, где каждый сможет испытать свою удачу на великолепных лицензионных слотах.Не упустите шанс окунуться в захватывающий мир азарта и выигрышей. PokerDom Казино предоставляет уникальную возможность испытать адреналин от игры в слоты на реальные деньги и ощутить настоящее волнение от каждого спина. Наше казино доступно в любое время, в любом уголке мира, благодаря чему вы сможете наслаждаться увлекательными играми без ограничений.
Michaelspoor · August 2, 2023 at 3:07 pm
https://webscript.ru/images/pgs/top_6787.html
cialis price · August 2, 2023 at 3:19 pm
prescription prices canadian meds Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Oscarnup · August 2, 2023 at 3:30 pm
http://ax.bk55.ru/cur/www/delivery/ck.php?ct=1&oaparams=2__bannerid=4248__zoneid=141__OXLCA=1__cb=1be00d870a__oadest=http%3a%2f%2fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
Mauricetex · August 2, 2023 at 3:32 pm
Как установить унитаз и не платить двойную цену
MattVS · August 2, 2023 at 3:35 pm
покердом скачать
онлайн казино покердом
Не забывайте, что PokerDom Казино также предоставляет возможность соревноваться с другими игроками в увлекательных турнирах. Соревнуйтесь за призовые места, демонстрируйте свои стратегии и получайте дополнительные вознаграждения. Уникальные акции и бонусы помогут вам увеличить свой бюджет и наслаждаться игрой еще больше.PokerDom Casino рад приветствовать новых игроков со всего мира. У нас вы найдете самые популярные слоты, которые гарантированно подарят вам массу положительных эмоций и шанс выиграть крупный джекпот. Наша команда разработчиков постоянно работает над добавлением новых увлекательных игр, чтобы удовлетворить запросы самых требовательных игроков.
Charlesirrag · August 2, 2023 at 3:44 pm
покердом играть онлайн
pokerdom
Что делает Покердом Казино настолько привлекательным? Это не только захватывающие игры и скачиваемый клиент на ПК, но и множество других уникальных возможностей. Программа лояльности для постоянных игроков, регулярные акции и бонусы, которые удивят даже опытных азартных гурманов. Большие выигрыши и великолепные призы ждут тех, кто решит испытать удачу на PokerDom Casino.Секрет успеха PokerDom Casino — в предлагаемых играх и великолепном сервисе. Сотрудничество с ведущими разработчиками позволяет предоставлять свежие новинки азартных игр, которые покоряют сердца игроков мгновенно. Это не просто слоты, это настоящие произведения искусства, где каждый вращающийся барабан — это шанс на большой выигрыш.
Jamesmam · August 2, 2023 at 3:45 pm
топ онлайн казино
http://tanganrss.com/rsstxt/cushion.php?url=football-yuga.ru
Когда вы вступаете на палубу онлайн казино, вы хотите, чтобы ваше путешествие было осыпано бриллиантами разнообразных игр и щедрых бонусов. Откройте для себя бескрайние просторы казино онлайн, где ожидаете волнующих сражений в рулетку, карты и слоты, где каждый шаг может привести к драгоценным моментам победы.Рейтинг онлайн казино 2023 для истинных азартных путешественников, ищущих незабываемые эмоции и щедрые призы, является ключевой информацией для тех, кто стремится испытать удачу и увлекательный драйв в играх казино на реальные деньги. В океане виртуальных гэмблинг-платформ, полных необычных возможностей, девизом настоящего игрового мореплавателя становится поиск “сокровищ” среди топ лучших онлайн казино.
PerryBooca · August 2, 2023 at 4:23 pm
pokerdom
http://wiki.integrics.ru/profile.php?id=13965
Погрузитесь в захватывающий мир азарта и возможностей на официальном сайте PokerDom Casino ? одного из самых увлекательных онлайн-казино на сегодняшний день! Если вы ищете место, где можно скачать клиент на ПК и играть онлайн в захватывающие слоты на реальные деньги, вы попали в нужное место!Надежность и безопасность ? наш главный приоритет. В PokerDom Casino мы строго соблюдаем все стандарты безопасности, чтобы обеспечить вам честную игру и полную конфиденциальность ваших данных. Все транзакции проходят через защищенные каналы, а лицензированные автоматы обеспечивают честные выплаты.
yakhaRok · August 2, 2023 at 4:39 pm
Сайт https://sgm.by/ это: Ремонт квартир домов комнат ванной сантехник электрик, работы строительные сантехнические электромонтажные штукатурные отделочные кровельные сварочные отопление водоснабжение замена труб батарей котлов, натяжные потолки, укладка плитки ламината сайдинг вагонка, перетяжка мебели дивана стульев, реставрация ванн бурение скважин, грузоперевозки клининг химчистка, муж на час, газосиликатные блоки доска брус, подключение ванны душевой мойки полотенцесушителя посудомоечной смесителя стиральной унитаза.
Oscarnup · August 2, 2023 at 4:40 pm
https://cse.google.com.bn/url?q=https://killapods.eu/fi/product-category/nikotiinipussit/
Robertvah · August 2, 2023 at 5:35 pm
https://chuvashagrolizing.ru/
Oscarnup · August 2, 2023 at 5:50 pm
https://otakusan.net/Home/ChangeLang?region=en&returnLink=https%3a%2f%2fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
MattVS · August 2, 2023 at 5:52 pm
скачать клиент покердом на телефон
pokerdom
Так что, если вы ищете место, где можно скачать клиент на ПК и играть онлайн в слоты на реальные деньги, PokerDom Casino готов предложить вам все это и многое другое. Присоединяйтесь к нам прямо сейчас, станьте частью нашего азартного сообщества и откройте для себя увлекательный мир азартных развлечений вместе с нами!И таким образом, PokerDom Казино становится для многих игроков не просто развлечением, а своего рода страстью и увлечением. Независимо от того, вы новичок или опытный игрок, здесь каждый найдет свою ставку, свой азарт и свою удачу. Откройте для себя новые горизонты азартных игр вместе с PokerDom Казино ? вашим надежным партнером в мире азартных развлечений!
Charlesirrag · August 2, 2023 at 5:59 pm
скачать приложение покердом на андроид бесплатно
https://mobilityweek.ru
Не упустите свой шанс ощутить вкус азарта и огромные выигрыши вместе с PokerDom Casino! Присоединяйтесь к нашему игровому сообществу, где каждый становится частью большой семьи азартных победителей. Покорите волнения игры на реальные деньги и откройте новые грани удачи прямо сейчас! PokerDom Casino – это ваш путь к успеху и богатству в удовольствиях азартных развлечений!Один из самых больших плюсов PokerDom Casino – это широкий выбор лицензионных автоматов. Здесь представлены слоты от лучших провайдеров, что обеспечивает беспрецедентное качество игры и честность результатов. Производители, такие как NetEnt, Microgaming, и Betsoft привнесли свою неповторимую изюминку в ассортимент игр, сделав его поистине уникальным.
BoAt Airdopes 441 water-resistant · August 2, 2023 at 6:09 pm
What’s up, after reading this amazing article i
am also delighted to share my familiarity here
with colleagues.
Robertpearl · August 2, 2023 at 6:30 pm
http://www.reporteseo.online/domain/blck1.fun
onmvfjcaw · August 2, 2023 at 6:35 pm
Alfa Travel https://alfatravel-tour.ru/ это подборка интересных направлений в мире, новости, блог о самых уникальных и необычных идей для путешествий, а также возможность купить самые дешевые билеты на самолет. Найти лучшие расценки по маршруту Москва – Ош это просто, выгодно, удобно.
Oscarnup · August 2, 2023 at 7:00 pm
https://atlantis-tv.ru/go?https://killapods.eu/product-category/disposable-vapes/
Williekepay · August 2, 2023 at 7:04 pm
сайт покердом
https://webranksdirectory.com/website-list-1254/
Загрузите клиент на ПК прямо сейчас и откройте для себя захватывающий мир PokerDom Casino. Играйте в лицензионные автоматы, наслаждайтесь яркими сюжетами и выигрывайте крупные призы. Наше казино открыто для всех, кто стремится к захватывающим эмоциям и головокружительным возможностям.Так что, дорогой игрок, если вы готовы к увлекательному путешествию в мир азартных развлечений, PokerDom Казино ждет вас. Заверните рукава, соберите свою удачу в кулак и отправляйтесь в захватывающее приключение с нами. Вас ждут яркие эмоции, волнительные моменты и, возможно, тот самый мега-джекпот, о котором вы так давно мечтали. Приготовьтесь к незабываемому опыту в PokerDom Casino!
Bandar Nine303 · August 2, 2023 at 7:11 pm
My family always say that I am wasting my time here at web, however I know I am getting knowledge every day by reading thes pleasant articles or reviews.
Robertvah · August 2, 2023 at 7:16 pm
взять оборудование в лизинг
ThomasTyday · August 2, 2023 at 7:19 pm
pokerdom apk
https://uadigital.tv
Добро пожаловать в захватывающий мир азарта и волнения – PokerDom Casino! Если вы ищете место, где можно испытать настоящую страсть к азартным играм, то вы попали именно туда, куда нужно. PokerDom Казино – это официальный сайт, который предлагает массу возможностей для всех поклонников онлайн-развлечений.Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь вас ждет захватывающее путешествие по безграничному океану азартных возможностей, где каждый может испытать дыхание удачи и покорить волнующие волнения игры на реальные деньги.
movie trailers 2023 · August 2, 2023 at 7:31 pm
Nice post. I learn something totally new and challenging on websites I stumbleupon on a daily basis.
It’s always helpful to read through articles from
other writers and practice something from other
websites.
Shawnnic · August 2, 2023 at 7:32 pm
игровые автоматы онлайн
https://www.netherfield.e-sussex.sch.uk/service/util/logout/CookiePolicy.action?backto=https://football-yuga.ru
Рейтинг онлайн казино 2023 для истинных азартных путешественников, ищущих незабываемые эмоции и щедрые призы, является ключевой информацией для тех, кто стремится испытать удачу и увлекательный драйв в играх казино на реальные деньги. В океане виртуальных гэмблинг-платформ, полных необычных возможностей, девизом настоящего игрового мореплавателя становится поиск “сокровищ” среди топ лучших онлайн казино.Друзья азартных приключений, готовы ли вы окунуться в увлекательный мир азартных развлечений и испытать свою удачу на реальные деньги? Если да, то сегодня мы представляем вашему вниманию самый свежий и актуальный рейтинг онлайн казино 2023 года! Сотни игровых площадок борются за ваше внимание, но наши эксперты отобрали только самые лучшие, достойные вашего внимания и времени. Давайте же рассмотрим их поближе!
Hermanerymn · August 2, 2023 at 7:49 pm
https://mashlizing.ru/
delaremontnika.ru · August 2, 2023 at 7:58 pm
We stumbled over here different website and thought I might check things out. I like what I see so now i am following you. Look forward to looking over your web page yet again.
Oscarnup · August 2, 2023 at 8:09 pm
https://silvamebel.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
Hermanerymn · August 2, 2023 at 8:34 pm
схема лизинговой сделки
Williekepay · August 2, 2023 at 8:52 pm
pokerdom
https://forums.planetemu.net/member.php?u=395021
Каждый истинный ценитель азартных игр знает, что PokerDom Казино ? это не просто интернет-платформа, это настоящий рай для любителей карточных развлечений и игровых автоматов. Здесь вы найдете великолепный выбор слотов, которые завоевали сердца тысяч игроков. На нашем сайте вас ждут разнообразные тематики и увлекательные сюжеты, которые погрузят вас в мир необычных приключений.Сотни ярких автоматов с призами и бонусами ждут тех, кто рискнет испытать удачу в нашем казино. А чтобы обеспечить максимально комфортный опыт, мы разработали клиент на ПК с удобным интерфейсом, позволяющим наслаждаться игрой в полном объеме. Эксклюзивные бонусы и акции для постоянных игроков станут дополнительным стимулом к долгим игровым сессиям.
Oscarnup · August 2, 2023 at 9:18 pm
http://xn--8-0tbal0b.xn--p1ai/bitrix/redirect.php?event1=&event2=&event3=&goto=https://killapods.eu/product-category/nicopods/pablo-snus/
Shawnnic · August 2, 2023 at 9:19 pm
рейтинг онлайн казино
https://www.hradycz.cz/redir.php?b=445&t=https://football-yuga.ru
“Магический Вулкан” – это заведение, где ваша удача бурлит, как настоящий вулкан! Игры с невероятными джекпотами и выгодные акции поразят даже самого опытного игрока. Почувствуйте магию азартных развлечений в “Магическом Вулкане”!Но будьте начеку, ведь капитаны лучших онлайн казино – это не только они, кто обещает сияющие сокровища, но и те, кто действительно способен их доставить. В поисках сокровищ, вам нужен надежный гид в мире игр казино на реальные деньги. Рейтинг онлайн казино становится вашим верным компасом, который указывает на путь к самым надежным и безопасным платформам.
BetBoom_rhymn · August 2, 2023 at 9:20 pm
Вход на официальный сайт Bet Boom
Hermanerymn · August 2, 2023 at 9:40 pm
лизинг на коммерческий транспорт
Robertpearl · August 2, 2023 at 9:46 pm
https://audit.lapaas.com/domain/nikotiinipussi.live
italiyavelp · August 2, 2023 at 9:50 pm
На сайте https://aviator-2021.ru/ вы сможете не только узнать всю необходимую информацию, но и технические характеристики игры «Авиатор». Это новый, интригующий краш, созданный для того, чтобы в него играло несколько пользователей. Как только начинается раунд, то в этот момент шкала растет. Это принципиально новая форма геймплея. Позволит получить новые, удивительные впечатления, яркие эмоции от времяпрепровождения. Также здесь имеется и программа, которая поможет взломать авиатор. Для этих целей необходимо внести депозит в размере 700 рублей.
Oscarnup · August 2, 2023 at 10:27 pm
https://mshop.nextype-demo.ru:443/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Williekepay · August 2, 2023 at 10:29 pm
покердом казино
https://form.kinkafamily.com/kinka-izakaya-korea-kinton-ramen-korea-opens/
PokerDom Casino — это настоящая находка для всех поклонников азартных развлечений. Здесь вас ждет целый арсенал лицензионных автоматов, предоставленных лучшими разработчиками игр. Каждый слот ? это уникальная история, и вы станете ее главным героем, испытывая адреналин и нереальные эмоции!Каждый истинный ценитель азартных игр знает, что PokerDom Казино ? это не просто интернет-платформа, это настоящий рай для любителей карточных развлечений и игровых автоматов. Здесь вы найдете великолепный выбор слотов, которые завоевали сердца тысяч игроков. На нашем сайте вас ждут разнообразные тематики и увлекательные сюжеты, которые погрузят вас в мир необычных приключений.
Oscarnup · August 2, 2023 at 11:35 pm
https://image.google.dm/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
yborka_rhymn · August 3, 2023 at 12:13 am
фирма по уборке https://vip-yborka.ru/
Oscarnup · August 3, 2023 at 12:44 am
https://toolbarqueries.google.com.kh/url?q=https://killapods.eu/product-category/disposable-vapes/
Robertpearl · August 3, 2023 at 1:02 am
https://www.webdesignplusseo.com/freeseoaudittools/domain/nikotiinipussi1.pro
Oscarnup · August 3, 2023 at 1:52 am
http://alt1.toolbarqueries.google.iq/url?q=https://killapods.eu/product-category/nicopods/pablo-snus/
kndfetoinc · August 3, 2023 at 2:12 am
На сайте http://kdm-ural.ru/ закажите такую важную услугу, как отделка натуральным камнем. Считается одним из главных направлений деятельности компании. Камень всегда будет пользоваться популярностью из-за того, что он не только привлекателен, но и практичен, надежен, отличается длительным сроком эксплуатации. С его помощью создают столешницу, стены, а также хамамы, архитектурные формы и многое другое. Каждое изделие наделено привлекательным внешним видом, стильным дизайном.
ngalkBuich · August 3, 2023 at 2:44 am
Adventure Travel https://advtravel.ru/ это интересный блог о путешествиях, а также выгодные цены на авиабилеты. Самые дешевые авиабилеты из Москвы в Тель-Авив. Вы сможете узнать расписания рейсов, какие авиакомпании летают, цены на авиаперелеты и другую интересную информацию о напрвлении.
http://looknohand.com/ · August 3, 2023 at 2:52 am
PBX has many benefits, including its price-effective solutions.
They need to search out price-effective options to develop their enterprise, but
not bankrupt them.
Oscarnup · August 3, 2023 at 3:01 am
https://abit.susu.ru/bitrix/rk.php?goto=https://killapods.eu/
chauffeur kl · August 3, 2023 at 3:46 am
If you desire to take a good deal from this piece of writing then you have to apply
such techniques to your won webpage.
Oscarnup · August 3, 2023 at 4:10 am
http://ec2-174-129-193-49.compute-1.amazonaws.com/counter.php?url=https://killapods.eu/
Robertpearl · August 3, 2023 at 4:25 am
https://www.report.nadvertex.com/domain/disposable-vape.xyz
Oscarnup · August 3, 2023 at 5:20 am
https://soyuz-group.ru/bitrix/click.php?goto=https://killapods.eu/
เว็บตรง · August 3, 2023 at 5:55 am
We stumbled over here different website and thought I may as well check things out.
I like what I see so i am just following you.
Look forward to finding out about your web page repeatedly.
Here is my site :: เว็บตรง
JustinKep · August 3, 2023 at 6:03 am
casino онлайн
http://m-buy.ru/?URL=https://football-yuga.ru
Но будьте начеку, ведь капитаны лучших онлайн казино – это не только они, кто обещает сияющие сокровища, но и те, кто действительно способен их доставить. В поисках сокровищ, вам нужен надежный гид в мире игр казино на реальные деньги. Рейтинг онлайн казино становится вашим верным компасом, который указывает на путь к самым надежным и безопасным платформам.В-третьих, прозрачность и скорость выплат. Никто не хочет ждать долгих дней, чтобы вывести свои заслуженные деньги. Ведь именно это и есть основная цель игры на реальные деньги – выиграть и насладиться своей победой.
ShannonItets · August 3, 2023 at 6:04 am
покердом
https://forums.planetemu.net/member.php?u=395021
Сотни ярких автоматов с призами и бонусами ждут тех, кто рискнет испытать удачу в нашем казино. А чтобы обеспечить максимально комфортный опыт, мы разработали клиент на ПК с удобным интерфейсом, позволяющим наслаждаться игрой в полном объеме. Эксклюзивные бонусы и акции для постоянных игроков станут дополнительным стимулом к долгим игровым сессиям.Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в слоты на реальные деньги, то ваше приключение начинается прямо здесь. PokerDom Casino предоставляет уникальную возможность испытать адреналин от игры в лицензионные автоматы с гарантированной надежностью и честностью.
кракен даркнет · August 3, 2023 at 6:04 am
Someone essentially lend a hand to make critically posts I would state.
This is the very first time I frequented your
web page and so far? I amazed with the research you made
to create this actual submit extraordinary. Excellent activity!
isayeLox · August 3, 2023 at 6:26 am
На сайте https://sadograd.ru/ вы сможете приобрести саженцы, семена от производителя. Компания работает на рынке более 30 лет, за которые изучила спрос постоянных клиентов, чтобы предложить такую продукцию, которая гарантированно будет пользоваться популярностью. Перед вами только качественные саженцы, которые обязательно приживутся, потому как они выращены специально для сурового российского климата. Для каждого клиента регулярные сезонные июльские скидки. При необходимости вы можете приехать в питомник и приобрести все, что необходимо.
Oscarnup · August 3, 2023 at 6:28 am
https://gojek.onelink.me/2351932542?af_force_deeplink=true&pid=Go-Jek_Web&is_retargeting=false&af_click_lookback=7d&c=Website_Footer_Download_Button_Google_Play_Store&af_adset=Play_Store_Android&af_ad=Play_Store_Android&af_channel=Button&af_dp=gojek://home&af_web_dp=https://killapods.eu/
Marian · August 3, 2023 at 6:36 am
You actually revealed that wonderfully!
Here is my web page https://socialoasis.us/socialoasis-payment-proof
delaremontnika.ru · August 3, 2023 at 7:01 am
Ahaa, its nice conversation regarding this post here at this webpage, I have read all that, so now me also commenting here.
Oscarnup · August 3, 2023 at 7:32 am
https://clients1.google.com.ag/url?q=https://killapods.eu/product-category/disposable-vapes/
Robertpearl · August 3, 2023 at 7:42 am
https://seo.onlinepro.gr/domain/pablo-snus.shop
ShannonItets · August 3, 2023 at 7:48 am
покердом
https://pionerart.ru/calendar/smi/469/
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск закончился ? ведь здесь вас ждут невероятные призы, клиент на ПК высочайшего качества и самые лицензионные автоматы, которые окунут вас в океан азарта.Итак, если вы ищете надежное и захватывающее онлайн-казино с огромным выбором слотов на реальные деньги, PokerDom Casino ? ваш идеальный выбор. Не упустите шанс испытать удачу и окунуться в мир азарта и развлечений прямо сейчас. Загрузите клиент на ПК, зарегистрируйтесь на официальном сайте PokerDom Casino и начните свой захватывающий игровой путь прямо сейчас! Мы ждем вас у наших виртуальных игровых столов, где вы можете стать настоящим чемпионом PokerDom Казино!
JustinKep · August 3, 2023 at 7:49 am
топ онлайн казино
https://www.24real.ro/send_to_friend.asp?txtLink=https://football-yuga.ru
Кристалл Фортуны – это онлайн казино, которое перенесет вас в мир приключений и сокровищ. Здесь вы найдете увлекательные слоты с тематикой археологии и приключений. Пробуйте свою удачу и ищите драгоценные камни вместе с Кристалл Фортуны. Кроме того, казино предоставляет множество опций для быстрых и безопасных денежных операций.Но не думайте, что все здесь так предсказуемо, как игра в рулетку. Наши эксперты не останавливаются на достигнутом и постоянно ищут новые интересные варианты для наших посетителей. Они разрабатывают уникальные форматы игр, которые еще никогда не видели свет. Это как невидимые карты в рукаве у талантливого фокусника – всегда остается место для сюрприза.
ThomasTyday · August 3, 2023 at 8:08 am
покердом казино
https://uadigital.tv
Не забывай следить за регулярными турнирами и соревнованиями на PokerDom Casino. Участие в них дает дополнительные возможности выиграть ценные призы и пополнить коллекцию своих трофеев. Будь в центре событий и получай удовольствие от азарта и конкуренции.На PokerDom Casino каждый игрок имеет возможность выразить свою индивидуальность, выбрав из множества уникальных слотов, которые переносят вас в различные уголки мира. От ярких и пестрых аллей Лас-Вегаса до таинственных храмов Шанхая – у нас вы найдете атмосферу, которая будет соответствовать вашему настроению и интересам.
MattVS · August 3, 2023 at 8:25 am
gama casino вход
казино gama онлайн
Gama Casino — это не просто игровая платформа, это истинное произведение искусства в мире гемблинга. Мы стремимся привнести в вашу жизнь незабываемые эмоции и радость от победы. Каждый уголок нашего виртуального казино пропитан атмосферой азарта и удачи, которая сопровождает каждого настоящего игрока.Не ждите случая — присоединяйтесь к Gama Casino прямо сейчас! Позвольте себе ощутить настоящую магию азартных игр и познакомиться с самыми щедрыми бонусами, которые призваны умножить ваши шансы на победу. Доверьтесь своей интуиции, и она не подведет вас на пути к волнительным призам и безудержному веселью.
Chau · August 3, 2023 at 8:32 am
This dude will have to be lazy due to the fact there are 10 other, much superior approaches to bang someone as decent as Inari.
My web site – https://Www.Insimed.org/8-critical-skills-to-do-webcams-live-porn-loss-remarkably-well/
Oscarnup · August 3, 2023 at 8:35 am
https://cse.google.nu/url?q=https%3A%2F%2Fkillapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
ShannonItets · August 3, 2023 at 9:26 am
pokerdom
http://ing-osk.com/facom/joyful.cgi?pg=45
Что делает PokerDom Casino особенным? Во-первых, это официальный сайт с прозрачными правилами и надежной системой защиты данных. Здесь вы можете играть с уверенностью в том, что ваша конфиденциальность и финансовая безопасность находятся под надежной защитой. Мы принимаем лицензирование нашего казино очень серьезно и стремимся предоставить нашим клиентам только лучшее.PokerDom Casino ? это место, где азарт воплощается в самых разнообразных формах. Здесь вы найдете огромный выбор лицензионных автоматов от ведущих мировых разработчиков, которые предоставляют уникальные и захватывающие игры с невероятной графикой и звуковым сопровождением. Наши слоты перенесут вас в иные миры и уголки времени, где каждое вращение барабанов обещает новые приключения.
HershelGag · August 3, 2023 at 9:28 am
https://curiocaster.com/podcast/pi6479598
JustinKep · August 3, 2023 at 9:29 am
лучшие казино онлайн
https://www.sunvalley.com/?URL=https://www.football-yuga.ru
Итак, друзья, выбор за вами. В нашем рейтинге онлайн казино 2023 года каждый найдет что-то особенное для себя. Неважно, вы новичок или опытный игрок – уникальные возможности и оригинальные игры ждут вас в наших топ-лучших казино. Помните, что азартные игры на реальные деньги требуют ответственного подхода, и никогда не ставьте больше, чем можете позволить себе. Удачи вам в этом захватывающем мире азарта!Если вы ищете казино с оригинальными и увлекательными играми, то Шанс Корона – ваш идеальный выбор. Это заведение славится своими уникальными игровыми автоматами и прогрессивными джекпотами, которые могут принести вам невероятные выигрыши. Кроме того, Шанс Корона предлагает щедрые бонусы новым игрокам, делая игру еще более прибыльной.
salvage auction · August 3, 2023 at 9:39 am
Good day! I just would like to give you a big thumbs up for the
excellent info you have got here on this post. I am returning to your website for more soon.
Visit my page … salvage auction
Oscarnup · August 3, 2023 at 9:44 am
https://sp-klub.ru/go.php?https://killapods.eu/
ktorsrhype · August 3, 2023 at 9:56 am
Сайт https://go-ip.ru/ представляет собой биржу трафика, которая работает в течение длительного времени и предоставляет свои услуги всем желающим. Администрация сайта заботится о клиентах, а потому предлагает сервис высокого уровня. Биржа стремительно развивается, предлагая большее количество услуг. Воспользуйтесь кликами по баннерам, а также рекламе, настраиваемыми шаблонами. Только для вас комфортная, понятная панель управления, а также критерии трафика. Инновационная биржа работает 24/7, чтобы вы воспользовались ей в любое время.
Michaelspoor · August 3, 2023 at 10:08 am
https://www.shortcut.ru/pag/v_mire_sportivnogo_kino__ot_triumfa_do_tragedii.html
MattVS · August 3, 2023 at 10:16 am
gama casino онлайн
gama casino
Gama Casino – это не просто место для игры, это целый мир волнения и возможностей. Играя у нас, вы окажетесь в самом эпицентре азартного веселья и станете частью нашей большой игровой семьи. Мы стремимся сделать каждый ваш визит уникальным и незабываемым, именно поэтому вы всегда захотите вернуться сюда снова и снова.Кроме того, Gama Casino уделяет особое внимание партнерским отношениям. У нас вы найдете лучшие условия для партнеров, которые стремятся вести собственный бизнес в сфере онлайн гемблинга. Мы поддержим вас на каждом шагу и поможем достичь новых вершин вместе.
HershelGag · August 3, 2023 at 10:24 am
https://music.amazon.com/podcasts/2343ff0f-dde4-4124-bf74-71ab50e50d0c/%D0%B2%D1%81%D1%82%D1%83%D0%BF%D0%BB%D0%B5%D0%BD%D0%B8%D0%B5-%D0%B2-%D0%BC%D0%B8%D1%80-%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8—%D0%BE%D1%81%D0%BD%D0%BE%D0%B2%D1%8B-%D0%BF%D0%BE%D0%BA%D1%83%D0%BF%D0%BA%D0%B8-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B8-%D0%B6%D0%B8%D0%BB%D1%8C%D1%8F
ThomasTyday · August 3, 2023 at 10:25 am
pokerdom apk скачать
https://uadigital.tv
Что делает Покердом Казино настолько привлекательным? Это не только захватывающие игры и скачиваемый клиент на ПК, но и множество других уникальных возможностей. Программа лояльности для постоянных игроков, регулярные акции и бонусы, которые удивят даже опытных азартных гурманов. Большие выигрыши и великолепные призы ждут тех, кто решит испытать удачу на PokerDom Casino.PokerDom Casino — это не просто интернет-казино, это уникальное пространство для настоящих ценителей азарта и высоких ставок. На официальном сайте тебя ждет огромный выбор лицензионных автоматов от лучших мировых провайдеров. Секрет успеха этого казино в постоянном обновлении ассортимента игр и следовании последним тенденциям индустрии.
tadalafil 20 mg · August 3, 2023 at 10:27 am
viagra online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Robertpearl · August 3, 2023 at 10:53 am
https://www.webseoanalyzer.com/domain/nikotiinipussit.ink
Oscarnup · August 3, 2023 at 10:54 am
https://samara.academica.ru/bitrix/rk.php?goto=https://killapods.eu/product-category/nicopods/pablo-snus/
HershelGag · August 3, 2023 at 11:16 am
https://radiopublic.com/-6rLend/s1!1812c
Barbaranet · August 3, 2023 at 11:22 am
pokerdom
https://tierrahotelera.es/component/k2/item/8-intelligent-business/8-intelligent-business?start=80
Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.Почему PokerDom Casino считается одним из лидеров в мире азартных игр? Это просто! У нас вы найдете настоящую разнообразность игр для каждого вкуса. Независимо от того, являетесь ли вы страстным поклонником классических слотов или предпочитаете новейшие 3D-автоматы с уникальными сюжетами ? у нас есть все, чтобы удовлетворить ваше желание играть в Казино Покердом. Приготовьтесь к взрыву эмоций, когда вращающиеся барабаны принесут вам выигрыши!
HarrisonHX · August 3, 2023 at 11:33 am
казино gama online
gama casino играть
Теперь давайте поговорим о безопасности. Мы ценим каждого клиента и предоставляем гарантию честной игры и защиты персональных данных. Gama Casino работает только с лицензионными программными продуктами, что обеспечивает честность и неприкосновенность игрового процесса. Вы можете быть уверены, что ваш опыт в нашем казино будет абсолютно безопасным и надежным.Gama Casino – это не просто место для игры, это целый мир волнения и возможностей. Играя у нас, вы окажетесь в самом эпицентре азартного веселья и станете частью нашей большой игровой семьи. Мы стремимся сделать каждый ваш визит уникальным и незабываемым, именно поэтому вы всегда захотите вернуться сюда снова и снова.
HershelGag · August 3, 2023 at 11:48 am
https://music.amazon.com/podcasts/181f07ee-a0c7-4016-8b1d-4b2a7841cdad/digital-success
BlaineWotte · August 3, 2023 at 11:50 am
cat casino бездепозитный бонус
cat casino 2023
Лицензия и безопасность: Ваши интересы на первом местеОдним из основных преимуществ Cat Casino является щедрая система бонусов и акций. Казино ценит каждого игрока и готово радовать его особыми предложениями. Участвуйте в турнирах среди игроков и побеждайте, чтобы получить дополнительные призы и фриспины в популярных слотах. С Cat Casino вы почувствуете себя в центре внимания и заботы, как настоящая королевская кошка!
Oscarnup · August 3, 2023 at 12:02 pm
http://master-fotoshop.ucoz.ru/go?https://killapods.eu/fi/product-category/nikotiinipussit/
HershelGag · August 3, 2023 at 12:31 pm
https://podvine.com/podcast/digital-success
Barbaranet · August 3, 2023 at 1:04 pm
покердом казино
http://gallery.vavilon.ru/people/s/smirnov-okhtin/
Любимым моментом многих наших игроков является возможность играть в лицензионные автоматы различных производителей, таких как NetEnt, Microgaming, Play’n GO и многих других. Каждый из них предлагает уникальный геймплей, увлекательные бонусы и огромные джекпоты, которые можно выиграть в один момент. Это как съемка звезд с неба на игровом поле, где каждый вращающийся символ ? шанс на большую победу.Почему PokerDom Casino считается одним из лидеров в мире азартных игр? Это просто! У нас вы найдете настоящую разнообразность игр для каждого вкуса. Независимо от того, являетесь ли вы страстным поклонником классических слотов или предпочитаете новейшие 3D-автоматы с уникальными сюжетами ? у нас есть все, чтобы удовлетворить ваше желание играть в Казино Покердом. Приготовьтесь к взрыву эмоций, когда вращающиеся барабаны принесут вам выигрыши!
FAGARO2 · August 3, 2023 at 1:08 pm
I was recommended this web site by my cousin. I am not sure whether this post is written by
him as no one else know such detailed about my problem.
You are wonderful! Thanks!
Oscarnup · August 3, 2023 at 1:11 pm
https://etalon.su/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://killapods.eu/product-category/disposable-vapes/
Robertpearl · August 3, 2023 at 1:41 pm
https://www.d-marketinghub.com/webanalyzer/domain/snus1.wiki
evpopJek · August 3, 2023 at 1:55 pm
На сайте https://www.rdlove.ru/ вы сможете почитать полезную, нужную информацию, касающуюся любви, отношений, интимной близости. Все рекомендации дельные, исчерпывающие, поэтому обязательно ответят на ваш вопрос. Каждая статья сопровождается цветной картинкой, чтобы улучшить восприятие. Здесь вы найдете всю нужную информацию о романтических отношениях, правилах поведения, если у вас первый секс. Регулярно на портале появляются новые статьи, которые также будут для вас важны, если хотите быть в теме.
HarrisonHX · August 3, 2023 at 1:59 pm
казино gama online
казино gama онлайн
Гама Казино — это не просто игровая платформа, это целый игровой мир, где настоящая магия азарта сливается с комфортом и инновациями. Приготовьтесь к захватывающему путешествию по лучшим азартным развлечениям России. Почувствуйте волнение каждой победы и переживайте радость успеха вместе с Gama Casino!Гама Казино предоставляет широкий выбор игр, специально отобранных для вас командой опытных игроков и экспертов. Здесь каждый найдет что-то особенное и уникальное для себя. От классических игровых автоматов до последних новинок, от увлекательных настольных игр до захватывающего видео-покера – у нас есть всё, чтобы удовлетворить самые изысканные вкусы.
HershelGag · August 3, 2023 at 2:03 pm
https://www.podchaser.com/podcasts/digital-success-5424125/episodes/digital-mir-vozmoznosti-i-vyzo-181027327
Oscarnup · August 3, 2023 at 2:20 pm
http://toolbarqueries.google.co.il/url?q=http%3A%2F%2Fkillapods.eu%2Fproduct-category%2Fnicopods%2Fpablo-snus%2F
BlaineWotte · August 3, 2023 at 2:21 pm
cat casino бездепозитный бонус
https://elbaspool.ru
Но не думайте, что Cat Casino ограничивается только игровыми автоматами. Мы предлагаем вам погрузиться в мир настоящего азарта, выбрав игру за живым столом в разделе Live Казино. Там вас ожидает настоящий дилер, с которым вы сможете почувствовать себя в роли настоящего игрока, соревнующегося за крупные выигрыши.Виртуальное казино Cat Casino поразит вас своим стильным дизайном и простым, интуитивно понятным интерфейсом. Здесь каждый игрок сможет скачать игровые автоматы на свое устройство и наслаждаться игрой в любое удобное время. Но если вы предпочитаете онлайн-формат, то также можно играть прямо на сайте казино без необходимости скачивать что-либо.
enamalmerly · August 3, 2023 at 2:43 pm
На сайте https://fairless.ru/ вы сможете воспользоваться актуальными скидками, промокодами на самые разные группы товаров, включая электронику, игры и консоли, обувь, одежду, красоту и здоровье, бытовую химию, подписки и услуги. Здесь вы найдете все, что нужно и абсолютно бесплатно. Можно отсортировать только промокоды или скидки, а также то, что предоставляется абсолютно бесплатно. Также вы найдете огненные предложения, которые истекают уже сегодня. Этот уникальный портал предоставляет уникальную возможность существенно сэкономить.
Barbaranet · August 3, 2023 at 2:46 pm
покердом
http://historyntagil.ru/forum/index.php?action=profile;area=summary;u=12311
Наша команда профессиональной поддержки всегда готова ответить на ваши вопросы и помочь вам в случае возникновения сложностей. Мы ценим каждого игрока и гарантируем конфиденциальность данных, а также честность и надежность всех наших игр.Что делает PokerDom Casino особенным? Во-первых, это официальный сайт с прозрачными правилами и надежной системой защиты данных. Здесь вы можете играть с уверенностью в том, что ваша конфиденциальность и финансовая безопасность находятся под надежной защитой. Мы принимаем лицензирование нашего казино очень серьезно и стремимся предоставить нашим клиентам только лучшее.
LeighThets · August 3, 2023 at 3:21 pm
pokerdom
https://elemantor.com/kurumsal-hayatta-karsiniza-cikabilecek-5-pozitif-insan-profili/
Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.Итак, если вы готовы окунуться в мир увлекательных приключений, PokerDom Casino ждет вас! Не упустите свой шанс стать победителем и ощутить волнение азарта прямо у себя дома. Скачайте клиент на ПК, зарегистрируйтесь и начните играть в слоты на реальные деньги уже сегодня! Приготовьтесь к захватывающему путешествию в мир PokerDom Casino, где удача всегда на вашей стороне!
789bet · August 3, 2023 at 3:27 pm
Hi there to all, the contents present at this site are genuinely amazing
for people experience, well, keep up the good work fellows.
Oscarnup · August 3, 2023 at 3:27 pm
https://astana4.prostitutki.today/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
mirsagyfrots · August 3, 2023 at 3:45 pm
На сайте https://girls38.ru вы сможете выбрать для себя такую девушку, с которой вы проведете выходной день либо вечер после работы. Все дамы невероятно ухоженные, стильные, с длинными волосами, ухоженными руками и внешностью. Они выполнят все, что вам необходимо для того, чтобы ощутить релакс, полноценно расслабиться. Если и вы считаете себя мачо, хотите произвести впечатление на девушек, то скорей заходите на этот сайт, где есть все, что нужно. Все девушки доступные и предлагают свои услуги по привлекательным ценам. Готовы приехать в отель.
HarrisonHX · August 3, 2023 at 4:15 pm
гама казино
gama casino официальный сайт
Итак, если вы ищете уникальное онлайн казино на русском языке с самыми инновационными игровыми автоматами, несомненно, Gama Casino — ваш идеальный выбор. Насладитесь атмосферой настоящего казино прямо у себя дома или в любом месте, где у вас есть доступ к интернету. Сделайте свою жизнь ярче, окунитесь в мир азарта и возможностей вместе с Gama Casino!Слоты – настоящая стихия Gama Casino. Наша коллекция включает в себя самые популярные и увлекательные слоты, которые заставят ваше сердце биться в унисон с ритмом больших выигрышей. Уникальные бонусные игры и фриспины позволят вам наслаждаться процессом игры еще больше, а наши редкие синонимы слов создадут неповторимую атмосферу и пробудят чувство новизны.
Julianbow · August 3, 2023 at 4:29 pm
https://dontimes.news/raznovidnosti-i-osobennosti-adresnyh-tablichek/
delaremontnika.ru · August 3, 2023 at 4:30 pm
Right now it sounds like Drupal is the best blogging platform out there right now. (from what I’ve read) Is that what you’re using on your blog?
Oscarnup · August 3, 2023 at 4:35 pm
https://grandtour-nsk.ru/bitrix/redirect.php?goto=https://killapods.eu/fi/product-category/nikotiinipussit/
Robertpearl · August 3, 2023 at 4:35 pm
https://www.layer7seo.com/domain/killa.ink
BlaineWotte · August 3, 2023 at 4:40 pm
уникальный бонус код cat casino 2023
https://elbaspool.ru
Заходите на официальный сайт Кэт Казино и откройте для себя мир невероятных возможностей. Мы гарантируем вам волшебные эмоции, незабываемые приключения и бесконечный азарт. Кот-символ нашего казино приведет вас к сокровищам и удаче, а вы станете настоящими хозяевами игрового мира.Казино онлайн: Где виртуальное становится реальностью
rrelfnEndoT · August 3, 2023 at 4:47 pm
По ссылке https://play.google.com/store/apps/details?id=com.ball.circular69journey вы сможете попытать свою удачу в БК «Олимп Бет», которая работает абсолютно честно, на легальной основе. Вы сможете сделать ставки через мобильное приложение. БК спонсирует различные спортивные команды. БК принимает ставки на любые виды спорта – всего их более 25. Однако основной упор сделан на теннис, хоккей, футбол. Здесь можно сделать ставки по киберспорту. При регистрации необходимо вводить только собственные данные во избежание ошибок.
עלות כתיבת ספר תורה · August 3, 2023 at 5:05 pm
Ahaa, its fastidious discussion about this post here at this blog, I have
read all that, so at this time me also commenting here.
LeighThets · August 3, 2023 at 5:08 pm
покердом казино
https://livewell-group.com/product/3ply-face-mask/
Добро пожаловать в удивительный мир азартных развлечений! PokerDom ? это невероятно захватывающий онлайн-казино, предлагающий вам уникальный опыт игры в слоты на реальные деньги. Здесь вы найдете все, что нужно для идеального досуга и захватывающих приключений.Итак, если вы готовы окунуться в мир увлекательных приключений, PokerDom Casino ждет вас! Не упустите свой шанс стать победителем и ощутить волнение азарта прямо у себя дома. Скачайте клиент на ПК, зарегистрируйтесь и начните играть в слоты на реальные деньги уже сегодня! Приготовьтесь к захватывающему путешествию в мир PokerDom Casino, где удача всегда на вашей стороне!
NathanAtrow · August 3, 2023 at 5:38 pm
Красивый частный эротический массаж Пермь в spa
MichaelSut · August 3, 2023 at 5:43 pm
автокран аренда
Oscarnup · August 3, 2023 at 5:43 pm
https://adocean-hu.hit.gemius.pl/_sslredir/hitredir/id=bVblbUNLCTKiT7enAqQT3dVrrmd1h48A9B9aUW5mU1b.U7/stparam=shkmiqmgeg/fastid=jaigammlgytixbnptugdafcqhdjo/url=killapods.eu%2Ffi%2Fproduct-category%2Fnikotiinipussit%2F
kasko_viess · August 3, 2023 at 5:49 pm
https://strahovanie-kasko.ru/
상품권소액결제 · August 3, 2023 at 5:50 pm
Thanks for the auspicious writeup. It if truth be told
used to be a enjoyment account it. Look complicated to
far added agreeable from you! By the way, how can we keep up a correspondence?
Jacobcef · August 3, 2023 at 6:23 pm
cat casino играть
https://tverturism.ru
Cat Casino не просто предоставляет возможность играть в онлайн-казино, но и создает уютное виртуальное пространство, где каждый геймер ощущает себя желанным гостем. Множество способов внесения и вывода средств делает процесс игры максимально удобным и безопасным. Кроме того, Cat Casino обеспечивает полную конфиденциальность данных пользователей, что делает игровой процесс максимально беззаботным и комфортным.Cat Casino предлагает не только скачивать игровые автоматы, но и играть онлайн в прямом эфире. Наша передовая технология позволяет вам наслаждаться азартом без задержек и с блестящей графикой. Забудьте о скучных ожиданиях и долгих загрузках — у нас каждый клик становится мгновенной реакцией, а каждый выигрыш — настоящим триумфом.
TerryWog · August 3, 2023 at 6:26 pm
pokerdom приложение
https://forums.planetemu.net/member.php?u=392913
Один из лозунгов PokerDom Casino звучит как “Успех в ваших руках”. И это действительно так! Ведь здесь каждый игрок может почувствовать себя настоящим победителем. Благодаря щедрым бонусам и уникальной программе лояльности, ваш путь к успеху будет еще более увлекательным. Выбирайте подходящий бонус, используйте редкие синонимы стратегий, и пусть удача всегда будет на вашей стороне.Скачать и установить клиент PokerDom на ваш компьютер – это простой и удобный способ насладиться всем разнообразием игр и выгодных акций. Казино PokerDom предлагает уникальные бонусы новым игрокам, чтобы увеличить их шансы на победу. Также, регулярные турниры и розыгрыши призов добавляют дополнительную порцию адреналина к вашему игровому процессу.
TravisTXcef · August 3, 2023 at 6:29 pm
gama casino
gama casino
Gama Casino — это также место, где каждый желающий может попробовать свои силы в демо-режиме абсолютно бесплатно. Да, вы не ослышались! Играть на русском языке в онлайн казино Gama Casino можно абсолютно бесплатно. Это отличная возможность ознакомиться с играми, изучить правила, разработать стратегию и только потом, когда вы почувствуете уверенность, перейти к реальным ставкам.Кроме того, Gama Casino уделяет особое внимание партнерским отношениям. У нас вы найдете лучшие условия для партнеров, которые стремятся вести собственный бизнес в сфере онлайн гемблинга. Мы поддержим вас на каждом шагу и поможем достичь новых вершин вместе.
LeighThets · August 3, 2023 at 6:44 pm
pokerdom
https://tr.wikipedia.org/wiki/Yeva_Polna
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск закончился ? ведь здесь вас ждут невероятные призы, клиент на ПК высочайшего качества и самые лицензионные автоматы, которые окунут вас в океан азарта.Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете возможность испытать адреналин и удачу, играя онлайн в слоты на реальные деньги, то вы обнаружили свой идеальный пункт назначения.
Oscarnup · August 3, 2023 at 6:53 pm
https://touchnote.onelink.me/3205415180?pid=Web&c=New%20Homepage_UK&af_ad=Get%202%20Cards%20Free&is_retargeting=true&af_dp=tn%3A%2F%2F&af_web_dp=https%3A%2F%2Fkillapods.eu
LeighThets · August 3, 2023 at 7:18 pm
pokerdom
http://www.destinoteatro.it/madrids-photo-marathon/
Почему PokerDom Casino считается одним из лидеров в мире азартных игр? Это просто! У нас вы найдете настоящую разнообразность игр для каждого вкуса. Независимо от того, являетесь ли вы страстным поклонником классических слотов или предпочитаете новейшие 3D-автоматы с уникальными сюжетами ? у нас есть все, чтобы удовлетворить ваше желание играть в Казино Покердом. Приготовьтесь к взрыву эмоций, когда вращающиеся барабаны принесут вам выигрыши!Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете возможность испытать адреналин и удачу, играя онлайн в слоты на реальные деньги, то вы обнаружили свой идеальный пункт назначения.
NathanAtrow · August 3, 2023 at 7:29 pm
Отборный частный эромассаж в Перми с сауной
Robertpearl · August 3, 2023 at 7:35 pm
https://seofaktor.de/domain/elf-bar.pro
Oscarnup · August 3, 2023 at 8:02 pm
https://adservice.hepsiburada.com/event/api/v1/track?event=SWp5UFM0Q3lhTmxvVlpwSUZIUC9yMmhHUFU0RTZlYVFxc0hhNkpVUnFienJXd1E0WlRlQ0JYMytpc0thT3Y4cDZKbTR5V0RnVDR6MnFVNHdlem9JN0hJNTduMFpOS0xmVW5kUUp3WHJXRnBBNGVjR2tiUXg0eXZwYkZKTWsreGwrZG1pb0M0bjE5dUI3aGgvaXVWTnBIQ041dW1OQkFXaXlzdHYyRUlJaG1UNjRqMmNJUFFmRnpVTDM5UHVPbXUxVXBBTWhmM0Z1eTI5OGtFSjJkc1JudkZPY0FZWVF3aXRlckJ2M0JpcWJYTFdKUzFFS2pNMzFFZFFONkpUMlhWVnAzbUQ3eVhOWWQvQjJLQ1gvL0JoSlhrdWVqeFF4Q01lUVV3dkFpclVOK2tacEcreDdDc1kvOUhRVklrUmcrRGp3R3E3Rk4xRE1vZWVTNlE1NHpITHE1MjFld1pxM0U1clV5cDFhRm1tdUpqUittOE12Sk5UTkszRkhKUEowK2t3M0owd0c2eXpaOTJkSTRQazF1OFI5a0t3WU9xMGxaRklOMkc3K1NVWU9aKytuQWg3MG90NmJNc0VCUWVTc090ZEttS1l6Z2dPTXRyMg==&redirect=https%3A%2F%2Fkillapods.eu&eventName=sp-click&platform=desktop
TerryWog · August 3, 2023 at 8:13 pm
скачать покердом на телефон
http://6cfn.com/component/k2/item/2-thailand-social-media-stats-28-million-on-facebook-4-5-million-on-twitter-1-7-million-on-instagram.html?start=19600
Один из главных плюсов PokerDom Casino ? это возможность скачать специальный клиент на ПК. Мгновенный доступ к миру азартных развлечений прямо с вашего компьютера ? это удобство и надежность в одном флаконе. Забудьте о том, чтобы искать сайт в браузере, установите приложение и погрузитесь в уникальный мир казино без лишних хлопот.Не упустите возможность скачать клиент PokerDom и насладиться увлекательными играми на реальные деньги. Покердом Казино предлагает вам возможность испытать настоящий азарт и выиграть великолепные призы.
Jacobcef · August 3, 2023 at 8:51 pm
cat casino войти
https://tverturism.ru
Помимо разнообразных игровых автоматов, Cat Casino предоставляет возможность насладиться атмосферой настоящего казино благодаря своему разделу с живыми дилерами. Ставьте на победу в рулетке, блэкджеке или баккаре в режиме реального времени и почувствуйте волнение азартной игры в полной мере.Cat Casino — ваш идеальный партнер в мире азарта и увлекательных приключений! Если вы ищете надежное и захватывающее казино для скачивания игровых автоматов и онлайн развлечений, то добро пожаловать на наш официальный сайт! Cat Casino, Кэт Казино — именно те магические слова, которые откроют перед вами уникальный мир возможностей и неограниченных призовых шансов.
TravisTXcef · August 3, 2023 at 8:56 pm
казино gama вход
казино gama online
Gama Casino — это также место, где каждый желающий может попробовать свои силы в демо-режиме абсолютно бесплатно. Да, вы не ослышались! Играть на русском языке в онлайн казино Gama Casino можно абсолютно бесплатно. Это отличная возможность ознакомиться с играми, изучить правила, разработать стратегию и только потом, когда вы почувствуете уверенность, перейти к реальным ставкам.Gama Casino — это гармоничное сочетание страсти, таланта и инноваций. Мы привносим в этот мир нечто особенное, редкое и неповторимое. Мы позаботимся о вашем комфорте и уверенности, чтобы ваш путь к успеху был кратчайшим и наиболее захватывающим.
LeighThets · August 3, 2023 at 9:00 pm
покердом
http://haughtonassociates.com/index.php/component/k2/item/3/3?start=1660
Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.Что делает нас особенными? Наше казино полностью лицензировано, что гарантирует честность и надежность каждой игры. У нас представлены лишь лучшие, тщательно отобранные лицензионные автоматы, чтобы вы могли наслаждаться качественным геймплеем без ограничений.
Oscarnup · August 3, 2023 at 9:12 pm
https://qumo.ru/bitrix/redirect.php?goto=https://killapods.eu/product-category/disposable-vapes/
TerryWog · August 3, 2023 at 9:57 pm
покердом регистрация
https://forum.live-show.com/user/63588-marion/
Один из лозунгов PokerDom Casino звучит как “Успех в ваших руках”. И это действительно так! Ведь здесь каждый игрок может почувствовать себя настоящим победителем. Благодаря щедрым бонусам и уникальной программе лояльности, ваш путь к успеху будет еще более увлекательным. Выбирайте подходящий бонус, используйте редкие синонимы стратегий, и пусть удача всегда будет на вашей стороне.Что еще делает PokerDom Casino таким особенным? Конечно же, это наша команда профессиональных и дружелюбных сотрудников. Они всегда готовы помочь вам решить любые вопросы и проблемы, которые могут возникнуть в процессе игры. Мы ценим каждого игрока и стараемся предоставить максимально комфортные условия для вашего удовольствия.
Oscarnup · August 3, 2023 at 10:23 pm
http://alt1.toolbarqueries.google.com.co/url?q=https://killapods.eu/product-category/disposable-vapes/
LeighThets · August 3, 2023 at 10:41 pm
покердом казино
http://jejuluonto.com/bbs/board.php?bo_table=qna&wr_id=195018
PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.Что делает PokerDom Casino особенным? Во-первых, это официальный сайт с прозрачными правилами и надежной системой защиты данных. Здесь вы можете играть с уверенностью в том, что ваша конфиденциальность и финансовая безопасность находятся под надежной защитой. Мы принимаем лицензирование нашего казино очень серьезно и стремимся предоставить нашим клиентам только лучшее.
Robertpearl · August 3, 2023 at 10:54 pm
https://seo.cositt.com/domain/snusdirect24.life
TravisTXcef · August 3, 2023 at 11:08 pm
gama casino играть
казино gama online
Наша команда разработчиков и технической поддержки работает над тем, чтобы обеспечить вас первоклассным игровым опытом. Мы стремимся поддерживать высочайший уровень безопасности и конфиденциальности, чтобы ваше внимание полностью сосредоточилось на веселье и азарте игры.Гама Казино предоставляет широкий выбор игр, специально отобранных для вас командой опытных игроков и экспертов. Здесь каждый найдет что-то особенное и уникальное для себя. От классических игровых автоматов до последних новинок, от увлекательных настольных игр до захватывающего видео-покера – у нас есть всё, чтобы удовлетворить самые изысканные вкусы.
Jacobcef · August 3, 2023 at 11:09 pm
cat casino промокоды 2023
https://tverturism.ru
Загляните на официальный сайт Cat Casino и окунитесь в мир увлекательных игровых автоматов, где каждый вращающийся барабан — это шанс на удачу и большой выигрыш. Откройте для себя новые грани азартных ощущений и почувствуйте всю прелесть настоящего адреналина прямо из дома или в пути. Cat Casino — ваш путь к лучшим азартным развлечениям в 2023 году!Cat Casino предлагает высококлассную службу поддержки, где каждый игрок может рассчитывать на быстрые и профессиональные ответы на свои вопросы. Наша команда специалистов всегда готова помочь вам в любое время суток. Мы ценим ваше время и комфорт, поэтому делаем все возможное, чтобы ваше впечатление от Cat Casino было незабываемым.
LeighThets · August 3, 2023 at 11:53 pm
покердом
https://forums.overclockers.ru/memberlist.php?mode=viewprofile&u=426786
Среди наших игр, вы обязательно найдете что-то подходящее для себя: от захватывающих приключений в древности до космических фантазий будущего. Почувствуйте себя героем книги в слотах с уникальным сюжетом или отправьтесь в опасное космическое путешествие в игре с футуристической тематикой.Наша команда профессиональной поддержки всегда готова ответить на ваши вопросы и помочь вам в случае возникновения сложностей. Мы ценим каждого игрока и гарантируем конфиденциальность данных, а также честность и надежность всех наших игр.
atalyaRip · August 4, 2023 at 1:13 am
На сайте https://algoritmo-home.ru для вас подберут качественное освещение, а также различные декоративные стильные элементы, практичную и привлекательную мебель. И самое главное, что все будет создано в соответствии с вашим дизайн-проектом. Компания готова предложить огромный выбор уникальной дизайнерской мебели, которая сделает интерьер более привлекательным и стильным. Все конструкции долговечные, надежные, обрадуют своим стильным видом. Продукция реализуется по доступной цене и с быстрой доставкой.
Robertpearl · August 4, 2023 at 2:07 am
https://evelink.es/domain/zyn1.fun
binance · August 4, 2023 at 3:09 am
always i used to read smaller posts which as well cleqr theur motive,
and that iis also happening with this post which I am
reading at this place.
My wweb blog binance
twitch.tv · August 4, 2023 at 3:10 am
Heya! I’m at work browsing your blog from my new iphone! Just wanted to say I love reading your blog and look forward to all your posts! Keep up the great work!
elmariGow · August 4, 2023 at 3:17 am
На сайте https://www.luciano.ru/medicina-i-kosmetologiya/ вы сможете воспользоваться компетентными, квалифицированными услугами высококлассных специалистов, которые работают в медицинском центре высокого класса. К вашим услугам терапевтическая физиотерапия, а также восстановительная терапия. Она нацелена на то, чтобы вернуть силы организма. Также есть возможность воспользоваться и гидротерапией. Всем желающим доступны бьюти-процедуры, касающиеся ухода за телом. В клинике работают компетентные врачи.
Marisol · August 4, 2023 at 3:18 am
Very good forum posts Many thanks!
Feel free to surf to my web page :: https://socialoasis.us/socialoasis-about-us
Semeenzex · August 4, 2023 at 3:30 am
покердом регистрация
https://foro.noticias3d.com/vbulletin/member.php?u=259269
Наше казино работает круглосуточно, так что вы можете погрузиться в мир азарта и веселья в любое удобное для вас время. Независимо от того, являетесь ли вы утренним пташкой или ночным совой, вам всегда будет гарантирован доступ к вашим любимым играм.Покердом Казино: официальный сайт, на котором можно скачать и играть онлайн в увлекательные слоты на реальные деньги. Если вы ищете адреналин, азарт и возможность выиграть крупные суммы, PokerDom Casino является идеальным местом для вас. Наш клиент для ПК предлагает широкий выбор лицензионных автоматов, каждый из которых предлагает неповторимый игровой опыт.
Duanealace · August 4, 2023 at 3:32 am
казино cat бездепозитный бонус код
https://ludi-i-kuhni.ru
Что делает Cat Casino особенно привлекательным для игроков? Это, конечно же, щедрые бонусы и акции, доступные постоянным клиентам. Cat Casino ценит свою аудиторию и радует игроков дополнительными возможностями для победы. Уникальные турниры и лотереи придают игре особый шарм и создают атмосферу соревнований, что стимулирует настоящих азартных духом игроков к еще более смелым ставкам.Заходя на наш официальный сайт, вы сразу почувствуете уютную атмосферу казино, созданную с любовью к азартным играм. Cat Casino – это не просто казино, это настоящий мир развлечений и возможностей. У нас каждый найдет что-то свое: будь то захватывающие слоты, азартные настольные игры или захватывающий покер.
JamesLRcef · August 4, 2023 at 3:41 am
gama casino вход
gama casino вход
Одной из примечательных особенностей Gama Casino является наше богатое разнообразие бесплатных игровых опций. Вы можете наслаждаться захватывающими слотами, не рискуя своими финансами. Это прекрасная возможность оценить игры на деньги в демо-режиме, прежде чем вступить в настоящую битву за джекпоты.Слоты – настоящая стихия Gama Casino. Наша коллекция включает в себя самые популярные и увлекательные слоты, которые заставят ваше сердце биться в унисон с ритмом больших выигрышей. Уникальные бонусные игры и фриспины позволят вам наслаждаться процессом игры еще больше, а наши редкие синонимы слов создадут неповторимую атмосферу и пробудят чувство новизны.
NancyDaymn · August 4, 2023 at 3:42 am
покердом
http://forum.anime.org.ua/bbs/showthread.php?p=106935
Наши слоты ? это не только стандартные азартные автоматы. Здесь вы найдете редкие синонимы классических игр, эксклюзивные слоты, которые вы не встретите больше нигде. Наша команда творческих разработчиков уделяет особое внимание каждой детали, чтобы вам было интересно даже после многих часов игры.PokerDom Casino также гордится своим превосходным обслуживанием клиентов. Наша команда поддержки всегда готова помочь вам решить любые вопросы или проблемы, с которыми вы столкнулись. Мы ценим ваше время и стремимся максимально оперативно и профессионально решить все возникающие вопросы.
acrylic signs · August 4, 2023 at 4:20 am
Hi myy loved оne! I want to saү that this article is
amazing, great written and include almost all imρortant infos.
I ᴡoul like tօ peer exrra polsts like this . http://novisworld.xyz/index.php/Aztec_Tribal_Tee
cialis online · August 4, 2023 at 4:29 am
online medication pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Semeenzex · August 4, 2023 at 5:10 am
pokerdom скачать на андроид бесплатно
https://www.petboarding.us/author/semeensip/
Добро пожаловать в уникальный мир азартных развлечений на официальном сайте PokerDom Casino! Здесь вы найдете все, что нужно для захватывающего досуга и шанс испытать удачу в онлайн-слотах на реальные деньги. Мы предлагаем клиент на ПК, который позволяет наслаждаться игрой с комфортом, и лицензионные автоматы, которые гарантируют честность и надежность каждой партии.Один из самых удобных и привлекательных аспектов PokerDom Casino ? это возможность скачать клиент на ПК. Зачем зависеть от интернет-соединения и браузера, если вы можете скачать наше приложение и играть в любимые слоты даже без доступа в сеть? Мы заботимся о вашем комфорте и предлагаем только лучшее.
Robertpearl · August 4, 2023 at 5:21 am
https://mysiterank.org/domain/nicotine-pouches.cc
Vitamin B12 injection · August 4, 2023 at 5:26 am
Have you ever considered about adding a little bit more than just your articles?
I mean, what you say is valuable and everything. But just imagine if you added some great visuals
or video clips to give your posts more, “pop”! Your content is
excellent but with pics and clips, this website could
undeniably be one of the very best in its field.
Terrific blog!
NancyDaymn · August 4, 2023 at 5:28 am
онлайн казино покердом
https://hrv-club.ru/forums/index.php?autocom=gallery&req=si&img=4228
PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.Наша команда профессиональной поддержки всегда готова ответить на ваши вопросы и помочь вам в случае возникновения сложностей. Мы ценим каждого игрока и гарантируем конфиденциальность данных, а также честность и надежность всех наших игр.
lyonaGon · August 4, 2023 at 5:57 am
По ссылке https://play.google.com/store/apps/details?id=com.sportingjourney2323 вы сможете воспользоваться услугами букмекерской конторы, а также казино, которое предлагает огромный выбор развлечений на самый взыскательный вкус. Вот почему вы обязательно найдете то, что подарит приятные впечатления, острые эмоции от приятно проведенного времени. Sportingbet ведет свою деятельность на официальной основе и в режиме реального времени. Специально для вас дополнительные возможности для казино, а также ставок.
Duanealace · August 4, 2023 at 6:04 am
cat casino официальный сайт вход
https://ludi-i-kuhni.ru
Cat Casino – ваш надежный спутник в мире азартных развлечений и острых ощущений. Завораживающие игровые автоматы, увлекательные турниры, щедрые бонусы – все это ждет вас на официальном сайте казино. Подготовьтесь к невероятному азартному путешествию и отправляйтесь к победам вместе с Cat Casino!На страницах Cat Casino, Кэт Казино вы обнаружите широкий выбор игровых автоматов с различными сюжетами и механиками. Мы уверены, что вам будет интересно испытать удачу в наших эксклюзивных слотах, которые вы не найдете больше нигде. Каждый автомат — это уникальная история с невероятными приключениями и кратерами возможностей. От древних пирамид до далеких галактик — у нас есть слоты на любой вкус.
JamesLRcef · August 4, 2023 at 6:08 am
казино gama
gama casino играть
Добро пожаловать в захватывающий мир азартных развлечений — Gama Casino! Если вы ищете лучшее онлайн казино на русском языке с огромным выбором игровых автоматов, то вы попали по адресу. Gama Casino — это не просто интернет-казино, это настоящая оазис азартного рая, где каждый геймер найдет свою страсть и удачу.Слоты – настоящая стихия Gama Casino. Наша коллекция включает в себя самые популярные и увлекательные слоты, которые заставят ваше сердце биться в унисон с ритмом больших выигрышей. Уникальные бонусные игры и фриспины позволят вам наслаждаться процессом игры еще больше, а наши редкие синонимы слов создадут неповторимую атмосферу и пробудят чувство новизны.
tanislpunty · August 4, 2023 at 6:11 am
На сайте https://buy-accs.ru/ осуществляется продажа аккаунтов, социальных сетей, а также купонов. Перед вами быстрые мобильные прокси, которые идеально подходят для авито, парсинга и выполнения различных других задач. Воспользуйтесь качественной накруткой голосований, а также различными услугами относительно социальных сетей. Перед вами весь список аккаунтов, а также цена, доступное количество. Вы можете купить все, что нужно прямо сейчас и по привлекательной цене. Воспользуйтесь такой возможностью.
JamieDoria · August 4, 2023 at 6:32 am
prednisone cream over the counter: prednisone 2.5 mg – prednisone coupon
Semeenzex · August 4, 2023 at 6:45 am
покердом официальный сайт скачать на андроид
https://zirveoto.com.tr/index.php/tr/component/k2/item/26-image-4?start=80010
PokerDom Casino гарантирует безопасность и конфиденциальность каждого игрока. Мы принимаем все необходимые меры для защиты персональных данных и финансовой информации. Вы можете быть уверены, что ваши средства и личные данные находятся под надежной защитой.Покердом Казино: официальный сайт, на котором можно скачать и играть онлайн в увлекательные слоты на реальные деньги. Если вы ищете адреналин, азарт и возможность выиграть крупные суммы, PokerDom Casino является идеальным местом для вас. Наш клиент для ПК предлагает широкий выбор лицензионных автоматов, каждый из которых предлагает неповторимый игровой опыт.
NancyDaymn · August 4, 2023 at 7:07 am
покердом
http://haughtonassociates.com/index.php/component/k2/item/3/3?start=260
Не упустите шанс стать частью нашей большой игровой семьи. PokerDom Casino ждет именно вас! Скачайте наш клиент на ПК прямо сейчас, погрузитесь в мир захватывающих слотов на реальные деньги и наслаждайтесь лучшими лицензионными автоматами от ведущих разработчиков. Помните, PokerDom Casino ? это место, где рождаются азартные победы и где каждый игрок ощущает себя по-настоящему удачливым!Почему PokerDom Casino считается одним из лидеров в мире азартных игр? Это просто! У нас вы найдете настоящую разнообразность игр для каждого вкуса. Независимо от того, являетесь ли вы страстным поклонником классических слотов или предпочитаете новейшие 3D-автоматы с уникальными сюжетами ? у нас есть все, чтобы удовлетворить ваше желание играть в Казино Покердом. Приготовьтесь к взрыву эмоций, когда вращающиеся барабаны принесут вам выигрыши!
FrankSnori · August 4, 2023 at 7:31 am
pokerdom зеркало
https://mediltech.com/it/component/k2/item/2-a-night-of-dido-drama-and-dinner-nsectetur-adipisicing-elit-sed-do-eiusmod-tempor?start=2720
PokerDom Casino ? истинное воплощение уникального игрового опыта. Этот виртуальный рай для азартных любителей предоставляет неограниченные возможности для тех, кто хочет испытать драйв и адреналин, сорвав заветный куш. Откройте для себя увлекательные слоты, которые погружают вас в мир таинственных символов и живописных миров, наполненных невероятными сокровищами.Играть в слоты на реальные деньги ? это искусство предсказания, мастерство стратегии и удачливый шанс на успех. PokerDom Casino предоставляет вам возможность стать настоящим магом азартной удачи, волшебно собирая комбинации из символов и забирая свои сокровища в виде крупных выигрышей.
order clotrimazole · August 4, 2023 at 7:40 am
zyprexa 2,5mg generic zyprexa 5 mg prices zyprexa online
Duanealace · August 4, 2023 at 8:23 am
cat casino промокод для новых игроков
кэт казино
Среди множества онлайн-казино, Cat Casino безусловно заслуживает вашего внимания. Кэт Казино предлагает уникальную коллекцию игровых автоматов, которая включает в себя как классические, так и совершенно неожиданные игры. Наш сайт разрабатывался с учетом потребностей самых требовательных игроков, и мы уверены, что каждый сможет здесь найти что-то особенное для себя.Одним из основных преимуществ Cat Casino является щедрая система бонусов и акций. Казино ценит каждого игрока и готово радовать его особыми предложениями. Участвуйте в турнирах среди игроков и побеждайте, чтобы получить дополнительные призы и фриспины в популярных слотах. С Cat Casino вы почувствуете себя в центре внимания и заботы, как настоящая королевская кошка!
EmilySmorb · August 4, 2023 at 8:24 am
онлайн казино покердом
https://apple-arcade.jp/kabuapude/
PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.PokerDom Casino также гордится своим превосходным обслуживанием клиентов. Наша команда поддержки всегда готова помочь вам решить любые вопросы или проблемы, с которыми вы столкнулись. Мы ценим ваше время и стремимся максимально оперативно и профессионально решить все возникающие вопросы.
JamesLRcef · August 4, 2023 at 8:27 am
казино gama online
казино gama
Гама Казино — это не просто игровая платформа, это целый игровой мир, где настоящая магия азарта сливается с комфортом и инновациями. Приготовьтесь к захватывающему путешествию по лучшим азартным развлечениям России. Почувствуйте волнение каждой победы и переживайте радость успеха вместе с Gama Casino!Итак, если вы ищете уникальное онлайн казино на русском языке с самыми инновационными игровыми автоматами, несомненно, Gama Casino — ваш идеальный выбор. Насладитесь атмосферой настоящего казино прямо у себя дома или в любом месте, где у вас есть доступ к интернету. Сделайте свою жизнь ярче, окунитесь в мир азарта и возможностей вместе с Gama Casino!
Robertpearl · August 4, 2023 at 8:34 am
https://seowave.org/domain/killa1.wiki/UEyd64b9ee1003836
KeithPhada · August 4, 2023 at 9:08 am
бонус код cat casino 2023
https://turist-v-evrope.ru
Добро пожаловать в захватывающий мир азартных развлечений Cat Casino — великолепного онлайн казино 2023 года, где вы сможете не только скачать игровые автоматы, но и наслаждаться игрой в режиме онлайн. Отправьтесь в увлекательное путешествие по кругосветному казино Cat, где вас ждут беспрецедентные приключения и море адреналина.Но не думайте, что Cat Casino ограничивается только игровыми автоматами. Мы предлагаем вам погрузиться в мир настоящего азарта, выбрав игру за живым столом в разделе Live Казино. Там вас ожидает настоящий дилер, с которым вы сможете почувствовать себя в роли настоящего игрока, соревнующегося за крупные выигрыши.
OLL Порно · August 4, 2023 at 9:32 am
OLL Порно
FrankSnori · August 4, 2023 at 9:57 am
скачать покердом на андроид на реальные
https://www.toymods.org.au/forums/members/517715-Svenmic?tab=activitystream&type=all&page=1
Каждый игрок ? это исследователь, который открывает для себя новые горизонты азартного мира. PokerDom Casino ? это путеводитель, который направляет вас по дороге удачи. В каждой игре вы найдете не только возможность выиграть крупную сумму, но и настоящий азарт, который переполняет душу страстью к приключениям.Ключевые моменты PokerDom Casino
KeithPhada · August 4, 2023 at 10:54 am
cat casino код
cat casino 2023
Cat Casino — ваш идеальный партнер в мире азарта и увлекательных приключений! Если вы ищете надежное и захватывающее казино для скачивания игровых автоматов и онлайн развлечений, то добро пожаловать на наш официальный сайт! Cat Casino, Кэт Казино — именно те магические слова, которые откроют перед вами уникальный мир возможностей и неограниченных призовых шансов.Необходимо отметить, что игровые автоматы Cat Casino отличаются от остальных. Ведь они созданы с любовью и заботой, чтобы каждый наш гость чувствовал себя волшебником удачи. Коллекция наших слотов — это творение настоящих мастеров, в которых переплетаются волшебство и азарт.
StanleyblinI · August 4, 2023 at 11:03 am
Шикарный мужской эротический массаж в Перми с бассейном
minimum coverage requirements · August 4, 2023 at 11:11 am
What a material of un-ambiguity and preserveness
of valuable familiarity concerning unpredicted emotions.
Feel free to surf to my webpage :: minimum coverage requirements
Stephentix · August 4, 2023 at 11:15 am
гама казино
https://07tv.ru
Почему стоит выбрать именно Gama Casino? Во-первых, у нас вы найдете самый разнообразный и уникальный ассортимент игровых автоматов в России. Это не просто обычные слоты, здесь вы откроете для себя совершенно необычные и захватывающие игры, которые покорят ваше сердце с первых минут. Новаторские разработки от ведущих мировых провайдеров — вот что делает Gama Casino уникальным игровым пространством.Что делает Gama Casino столь уникальным? Наша платформа предлагает поразительное разнообразие игр: от классических игровых автоматов до инновационных слотов с захватывающими сюжетами. Здесь вы сможете ощутить всю мощь волшебства в легендарных азартных играх и воплотить мечты в реальность.
ariyaGracy · August 4, 2023 at 11:31 am
На сайте https://sobr26.ru можно получить бесплатную консультацию по своему вопросу и воспользоваться профессиональной охраной от высококлассных сотрудников. Они охраняют недвижимость, а также имущество. Стаж работы в данной сфере более 20 лет, а потому компания в курсе всех нюансов. На все услуги действуют привлекательные расценки. Услуги предоставляются «под ключ». К каждому клиенту практикуется индивидуальный подход, сохраняется конфиденциальность. Служба охраны всегда с вами.
Robertpearl · August 4, 2023 at 11:40 am
https://www.websiteauditingtools.com/domain/killa.bio
FrankSnori · August 4, 2023 at 11:54 am
покердом скачать на андроид бесплатно с официального
http://us-import-export-consulting.com/component/k2/item/26-simple-blog-post-16.html?limit=10&start=2960
Играть в слоты на реальные деньги ? это искусство предсказания, мастерство стратегии и удачливый шанс на успех. PokerDom Casino предоставляет вам возможность стать настоящим магом азартной удачи, волшебно собирая комбинации из символов и забирая свои сокровища в виде крупных выигрышей.Скачать клиент на ПК ? вратарь в мир безграничных возможностей
meytaJoits · August 4, 2023 at 12:05 pm
По ссылке https://play.google.com/store/apps/details?id=com.dice300.up523 вы сможете сделать свои ставки для того, чтобы заработать побольше денег и получить яркие, положительные и приятные эмоции. Компания начала свою работу в 2017 году, а сейчас в ее распоряжении огромное количество наземных пунктов. Для того чтобы совершить ставки, необходимо пройти идентификацию, а также регистрацию. На это уйдет всего несколько минут. Для клиентов всегда есть бонусы. К примеру, предлагается выиграть неплохой джекпот на несколько сотен миллионов рублей. Для этого рекомендуется пополнить счет.
Richardhem · August 4, 2023 at 12:08 pm
https://medata.org/novosti/
EmilySmorb · August 4, 2023 at 12:17 pm
онлайн казино покердом
http://przedszkolejp2.pl/item/6-slide-1?start=11390
Чтобы начать, просто скачайте наш клиент на ПК ? это удобное приложение, которое позволит вам получить максимум удовольствия от игры. Загрузка занимает всего несколько минут, а установка проходит быстро и без проблем. Затем вы сможете войти в свой аккаунт и окунуться в мир бесконечных возможностей.Что делает PokerDom Casino особенным? Во-первых, это официальный сайт с прозрачными правилами и надежной системой защиты данных. Здесь вы можете играть с уверенностью в том, что ваша конфиденциальность и финансовая безопасность находятся под надежной защитой. Мы принимаем лицензирование нашего казино очень серьезно и стремимся предоставить нашим клиентам только лучшее.
Richardhem · August 4, 2023 at 12:29 pm
http://laform.ru/novosti/kak-sdat-palladij-v-skupku.html
Richardhem · August 4, 2023 at 12:30 pm
https://novorossportal.ru/
Mashaayazex · August 4, 2023 at 12:48 pm
pokerdom mobile скачать
https://fliphtml5.com/homepage/urgcs
Скачивание клиента PokerDom на ПК – это простой и надежный способ получить доступ ко всем преимуществам нашего казино. Клиент PokerDom обеспечивает стабильную и безопасную игру, позволяя вам наслаждаться увлекательными слотами и конкурировать с другими игроками за крупные денежные призы.Играя на реальные деньги в PokerDom Казино, вы открываете перед собой множество возможностей для выигрыша. Наши слоты предлагают вам различные способы игры, бонусные раунды и уникальные функции, которые помогут вам увеличить ваш выигрыш. Помимо этого, мы предлагаем нашим игрокам щедрые бонусы, акции и программу лояльности, которые помогут вам получить еще больше выгоды от вашей игры в PokerDom.
Crypto_Nuh · August 4, 2023 at 1:19 pm
https://procripty-wiki.com/
KeithPhada · August 4, 2023 at 1:36 pm
cat casino промокоды 2023
казино cat
Cat Casino — это ваш личный билет в мир азарта и приключений. Здесь время остановится, а каждый вращающийся барабан откроет новые горизонты возможностей. Скачайте игровые автоматы, чтобы исследовать уникальные сюжеты, или играйте онлайн, чтобы погрузиться в невероятную атмосферу азарта прямо сейчас. Мир Cat Casino ждет вас с распростертыми объятиями, чтобы сделать каждую вашу ставку по-настоящему особенной!Cat Casino предлагает не только скачивать игровые автоматы, но и играть онлайн в прямом эфире. Наша передовая технология позволяет вам наслаждаться азартом без задержек и с блестящей графикой. Забудьте о скучных ожиданиях и долгих загрузках — у нас каждый клик становится мгновенной реакцией, а каждый выигрыш — настоящим триумфом.
atikxTah · August 4, 2023 at 1:40 pm
На сайте https://blogoflove.ru/ почитайте любопытные и интересные статьи, касающиеся взаимоотношений, секса, измен. Есть и актуальные, интересные истории любви. Почитайте информацию об изменах, возьмите консультацию психолога. Узнайте всю правду о расставании, разводе. Здесь имеется вся необходимая информация, которая потребуется вам для изучения темы. Цель этого портала – провести ликбез по одним из самых важных аспектов жизни. И самое важное, что вы получите только нужную и ценную информацию – она пригодится в будущем.
Stephentix · August 4, 2023 at 1:41 pm
gama casino официальный сайт
казино топ
Gama Casino – самый яркий мир азартных развлечений, где каждый игрок встречает захватывающее путешествие по волнам удачи. Жаждете испытать острые ощущения и покорить волнительные высоты казино на русском языке? Тогда добро пожаловать на официальный сайт Gama Casino!Во-вторых, наш интерфейс оформлен с любовью и заботой о наших гостях. Мы позаботились о том, чтобы каждый момент проведенный на нашем сайте приносил радость и удовольствие. Яркий и привлекательный дизайн, интуитивно понятная навигация и простота в использовании сделают вашу игровую сессию приятной и комфортной.
EmilySmorb · August 4, 2023 at 2:07 pm
онлайн казино покердом
http://www.visualchemy.gallery/forum/profile.php?id=2478750
PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.Чтобы начать, просто скачайте наш клиент на ПК ? это удобное приложение, которое позволит вам получить максимум удовольствия от игры. Загрузка занимает всего несколько минут, а установка проходит быстро и без проблем. Затем вы сможете войти в свой аккаунт и окунуться в мир бесконечных возможностей.
Robertpearl · August 4, 2023 at 2:31 pm
https://www.purplepier.com.br/analisador-de-site/domain/killa1.xyz
vroraflony · August 4, 2023 at 2:34 pm
На сайте https://fairless.ru/ вы сможете получить выгодные промокоды, воспользоваться скидками. Для этого необходимо лишь подобрать необходимую категорию товаров: электроника, игры, консоли, бытовая химия, все для красоты, подписки, услуги. Есть даже такие категории товаров, которые предоставляются абсолютно бесплатно. Промокоды регулярно обновляются, чтобы предоставить только актуальные и точные данные. Все промокоды свежие, а потому воспользоваться ими можно сейчас. Для того чтобы подобрать лучший вариант, необходимо воспользоваться специальным фильтром.
Mashaayazex · August 4, 2023 at 2:35 pm
pokerdom официальный
http://essentekstil.com.tr/tr/component/k2/item/3-carousel-articletext.html?start=10690
Скачивание клиента PokerDom на ПК – это простой и надежный способ получить доступ ко всем преимуществам нашего казино. Клиент PokerDom обеспечивает стабильную и безопасную игру, позволяя вам наслаждаться увлекательными слотами и конкурировать с другими игроками за крупные денежные призы.Покердом Казино предлагает широкий выбор слотов, которые включают в себя самые популярные лицензионные автоматы. На официальном сайте PokerDom вы найдете множество захватывающих игр, каждая из которых имеет уникальные особенности и потрясающую графику. Наше казино предлагает вам окунуться в мир увлекательных приключений и невероятных возможностей для выигрыша крупных сумм.
CoreyHeela · August 4, 2023 at 2:36 pm
cat casino игровые автоматы
https://rosyuvelirexpo.ru
Как начать играть на Cat Casino? Это проще простого! Просто зарегистрируйтесь на нашем официальном сайте и получите эксклюзивный доступ к нашему казино. Для удобства наших игроков, мы разработали мобильное приложение Cat Casino, которое позволит вам наслаждаться азартом в любом месте и в любое время.Но не думайте, что Cat Casino ограничивается только игровыми автоматами. Мы предлагаем вам погрузиться в мир настоящего азарта, выбрав игру за живым столом в разделе Live Казино. Там вас ожидает настоящий дилер, с которым вы сможете почувствовать себя в роли настоящего игрока, соревнующегося за крупные выигрыши.
mafianthush · August 4, 2023 at 2:51 pm
На сайте https://play.google.com/store/apps/details?id=com.goalgetter2323 вы сможете сделать ставки на спорт, на самые разные состязания. Теперь любое событие станет более захватывающим, удивительным и ярким, а главное – зрелищным. Каждый желающий сможет сделать ставки на футбол, теннис, баскетбол либо хоккей. Теперь вы сможете поставить на любую команду в любом месте, где бы вы ни были. Вас ожидают стабильные выигрыши. А сама БК является лицензированной и работает только для вас.
EmilySmorb · August 4, 2023 at 3:44 pm
покердом казино
https://zspruda.pl/wp/2015/03/05/slubowanie_2015/comment-page-20890/
PokerDom Casino ? это место, где азарт воплощается в самых разнообразных формах. Здесь вы найдете огромный выбор лицензионных автоматов от ведущих мировых разработчиков, которые предоставляют уникальные и захватывающие игры с невероятной графикой и звуковым сопровождением. Наши слоты перенесут вас в иные миры и уголки времени, где каждое вращение барабанов обещает новые приключения.Топ онлайн казино 2023: Секреты успеха
BillySaige · August 4, 2023 at 3:48 pm
http://svoimi-rukamy.net/
MichaelSut · August 4, 2023 at 3:51 pm
автокран ивановец 16 тонн
Stephentix · August 4, 2023 at 4:01 pm
самые лучшие казино
https://07tv.ru
Добро пожаловать в мир онлайн казино 2023 – оазис азарта и развлечений, где деньги могут превратиться в настоящие сокровища! Стремительное развитие технологий и интернета открывает перед нами огромные возможности в мире гемблинга. Онлайн казино – это новая эра азартных игр, которая покорила сердца многих игроков со всего мира.”Гранд Казино Рояль” – Королевское Игровое Великолепие
Mashaayazex · August 4, 2023 at 4:22 pm
покердом рабочее зеркало
http://www.coxisms.com/250/
Играя на реальные деньги в PokerDom Казино, вы открываете перед собой множество возможностей для выигрыша. Наши слоты предлагают вам различные способы игры, бонусные раунды и уникальные функции, которые помогут вам увеличить ваш выигрыш. Помимо этого, мы предлагаем нашим игрокам щедрые бонусы, акции и программу лояльности, которые помогут вам получить еще больше выгоды от вашей игры в PokerDom.Покердом Казино предлагает широкий выбор слотов, которые включают в себя самые популярные лицензионные автоматы. На официальном сайте PokerDom вы найдете множество захватывающих игр, каждая из которых имеет уникальные особенности и потрясающую графику. Наше казино предлагает вам окунуться в мир увлекательных приключений и невероятных возможностей для выигрыша крупных сумм.
JamieDoria · August 4, 2023 at 4:24 pm
amoxicillin 500mg pill buy amoxicillin 500mg usa – amoxicillin 500mg capsules
Elocon · August 4, 2023 at 4:26 pm
Thank you a bunch for sharing this with all of us you really realize what you are speaking about!
Bookmarked. Please also talk over with my web site =). We could have a hyperlink alternate agreement between us Elocon
Investment · August 4, 2023 at 4:28 pm
Superb, what a blog it is! This blog gives helpful facts to
us, keep it up.
BillySaige · August 4, 2023 at 4:43 pm
https://gorodschekino.ru/kakie-samye-populyarnye-kazaxskie-pesni/
EmilySmorb · August 4, 2023 at 4:57 pm
онлайн казино покердом
https://4ru.es/forum/profile/13550-ynuvku/
Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете возможность испытать адреналин и удачу, играя онлайн в слоты на реальные деньги, то вы обнаружили свой идеальный пункт назначения.PokerDom Casino ? это место, где игроки находятся в центре внимания. Мы заботимся о каждом из вас и стремимся обеспечить максимальный комфорт во время игры. У нас есть собственный клиент для ПК, который позволит вам наслаждаться волнительной атмосферой казино прямо на вашем настольном компьютере. Забудьте о скучных моментах, с PokerDom Casino каждая минута превратится в увлекательное приключение.
CoreyHeela · August 4, 2023 at 5:18 pm
промокоды казино cat 2023
https://rosyuvelirexpo.ru
Одним из главных преимуществ Cat Casino является возможность скачать приложение на свое устройство. Это отличная опция для тех, кто хочет иметь доступ к своим любимым играм в любое удобное время. Казино предоставляет уникальную возможность окунуться в мир азарта, не зависимо от того, где вы находитесь.Cat Casino готово порадовать вас щедрыми бонусами и уникальными акциями. Новые игроки могут рассчитывать на привлекательные приветственные бонусы, а постоянные посетители — на лояльные программы с дополнительными возможностями. Наш VIP-клуб даст вам доступ к эксклюзивным привилегиям и персональному сервису. Каждая ставка в Cat Casino приносит вам не только захватывающий опыт, но и дополнительные шансы на выигрыш!
Nathanliz · August 4, 2023 at 5:19 pm
офисные перегородки недорого
Robertpearl · August 4, 2023 at 5:24 pm
https://www.xigseoaudit.com/domain/nordic-spirit.ink
перетяжка мягкой мебели в Новосибирске · August 4, 2023 at 5:56 pm
Hello there! This article couldn’t be written any better! Looking at this post reminds me of my previous roommate! He always kept talking about this. I am going to forward this article to him. Pretty sure he will have a good read. Thank you for sharing!
nnasoqueen · August 4, 2023 at 6:22 pm
На сайте https://t.me/s/win1_russia ознакомьтесь с новостным порталом популярного проекта 1win. Сделать ставки теперь вы сможете и через свой мобильный телефон. И самое важное, что для того, чтобы существенно сэкономить, вы сможете воспользоваться специальным промокодом. Кроме того, организаторы очень часто предлагают различные бонусы. Играйте и выигрывайте крупные суммы и тратьте их на свое усмотрение. В этой группе вы найдете огромное количество фотографий, а также различных новостей.
Ramonsaise · August 4, 2023 at 6:38 pm
скачать pokerdom приложение на андроид
https://coinmarketcap.com/community/profile/ukn3ajflpfgy/
Казино PokerDom является надежным и проверенным партнером, предоставляющим клиентам высочайший уровень безопасности и честности игры. Скачать и установить клиент PokerDom на ваш ПК – это просто и удобно, открывая двери к захватывающим моментам и увлекательным игровым автоматам.Сомневаетесь, с чего начать свою азартную экскурсию? Не волнуйтесь, наша служба поддержки всегда готова помочь вам сделать правильный выбор. Мы гордимся своим профессионализмом и готовы ответить на все ваши вопросы в режиме реального времени. Забудьте о неопределенности, с PokerDom Casino вы всегда будете на верном пути к успеху.
RandallILEdity · August 4, 2023 at 6:46 pm
реальные онлайн казино
https://shishamag.ru
Великолепие игры на реальные деньги раскроется перед вами в “Гранд Казино Рояль”. Здесь каждый гость становится королем азартного гемблинга, получая доступ к самым качественным игровым автоматам и классическим настольным играм. Ощутите королевское наслаждение от игры в “Гранд Казино Рояль”.”Атмосфера Успеха”: Вдохновение для победы.
CoreyHeela · August 4, 2023 at 7:39 pm
промокод в казино cat
cat casino
Помимо разнообразных игровых автоматов, Cat Casino предоставляет возможность насладиться атмосферой настоящего казино благодаря своему разделу с живыми дилерами. Ставьте на победу в рулетке, блэкджеке или баккаре в режиме реального времени и почувствуйте волнение азартной игры в полной мере.Cat Casino предлагает высококлассную службу поддержки, где каждый игрок может рассчитывать на быстрые и профессиональные ответы на свои вопросы. Наша команда специалистов всегда готова помочь вам в любое время суток. Мы ценим ваше время и комфорт, поэтому делаем все возможное, чтобы ваше впечатление от Cat Casino было незабываемым.
Tannerdyday · August 4, 2023 at 8:18 pm
kraken ссылка
Robertpearl · August 4, 2023 at 8:22 pm
https://seositeanalyzer.pro/domain/siberia1.pro
Allenlok · August 4, 2023 at 8:25 pm
В рамках своей деятельности мы являемся заказчиками для производителей, контролируя процесс производства продукции. Мы предъявляем высокие требования к качеству товаров, и наши поставщики должны соответствовать этим стандартам. Мы также гарантируем нашим клиентам наилучшие технические и пользовательские характеристики товаров, а также выгодную цену по сравнению с конкурентами.
https://eastclima.ru/
Ramonsaise · August 4, 2023 at 8:26 pm
покердом официальный сайт скачать на андроид бесплатно
https://kanalizacijas.lv/component/k2/item/9-learn-from-the-past?start=2530
PokerDom Casino ? это место, где игроки становятся настоящими победителями. Мы уверены, что именно у вас есть все шансы сорвать крупный куш и стать обладателем виртуального золота. Скачайте наш клиент на ПК и окунитесь в мир азартных приключений с комфортом, который вы заслуживаете.Но PokerDom Casino ? это не просто место, где можно выиграть. Это настоящее игровое приключение, которое охватит вас с головой. Наш ассортимент лицензионных автоматов настолько разнообразен, что вы точно не сможете устоять перед соблазном попробовать все варианты. Вам предстоит отправиться в захватывающее путешествие по миру азартных игр и сорвать джекпот!
RandallILEdity · August 4, 2023 at 9:15 pm
онлайн казино обзор
https://shishamag.ru
Готовьтесь окунуться в мир азарта и неограниченных возможностей! Онлайн казино 2023 года предлагает невероятные азартные развлечения, которые покорят сердца всех гемблеров. Готовы ли вы испытать настоящий драйв и ощутить волнение от игры на реальные деньги? Тогда присоединяйтесь к нам в увлекательном путешествии по топовым онлайн казино!”Империя Казино” – словно королевство азарта и великолепных возможностей. Это место, где каждый игрок может стать настоящим магом удачи и покорить высоты успеха. “Империя Казино” предлагает самые популярные игры и щедрые бонусы, которые обеспечат вам максимальный комфорт и удовольствие от игры.
cheap viagra · August 4, 2023 at 9:25 pm
Aw, this was a very good post. Taking a few minutes and actual effort to
generate a good article… but what can I say… I hesitate
a whole lot and don’t manage to get nearly anything done.
Ramonsaise · August 4, 2023 at 10:11 pm
покердом официальный сайт
https://hellaslife.com/noel-gallaghers-new-york-gig-cancelled-due-to-bomb-threat/
PokerDom Casino ? это место, где игроки становятся настоящими победителями. Мы уверены, что именно у вас есть все шансы сорвать крупный куш и стать обладателем виртуального золота. Скачайте наш клиент на ПК и окунитесь в мир азартных приключений с комфортом, который вы заслуживаете.PokerDom Casino ценит каждого своего игрока и щедро вознаграждает за преданность. Наша программа лояльности позволит вам получать дополнительные бонусы и приятные сюрпризы с каждой новой победой. Соревнуйтесь с соперниками, собирайте очки лояльности и становитесь нашим VIP-клиентом с особыми привилегиями.
Tannerdyday · August 4, 2023 at 10:12 pm
кракен маркетплейс нарко
AurelioPrody · August 4, 2023 at 10:37 pm
ремонт и обслуживание бмв
JamesBop · August 4, 2023 at 10:38 pm
https://newsvo.ru/news/76553
Ramonsaise · August 4, 2023 at 10:45 pm
скачать покердом бесплатно на телефон
https://www.sitebs.ru/blogs/89639.html
Мы понимаем, что каждый игрок уникален, и у всех разные предпочтения. Именно поэтому мы предлагаем гибкие условия для начала игры. Вы можете выбрать уровень ставок, который вам по душе, и наслаждаться азартом без ограничений. Независимо от вашего опыта, у нас всегда найдется идеальный вариант.Но PokerDom Casino ? это не просто место, где можно выиграть. Это настоящее игровое приключение, которое охватит вас с головой. Наш ассортимент лицензионных автоматов настолько разнообразен, что вы точно не сможете устоять перед соблазном попробовать все варианты. Вам предстоит отправиться в захватывающее путешествие по миру азартных игр и сорвать джекпот!
michySoips · August 4, 2023 at 11:04 pm
На сайте https://mirkrovli-kmv.ru/ приобретите фасадные, кровельные материалы от популярной компании, которая находится на рынке длительное время и знает, что нужно самому прихотливому клиенту. Все реализуемые конструкции являются надежными, качественными, современными, а потому точно не подведут. В компании регулярно действуют акции, чтобы вы существенно сэкономили на покупке. Воспользуйтесь широким спектром услуг, предлагаемых компанией. Сюда входят консультации, составление документации.
binance · August 4, 2023 at 11:18 pm
Good day! Do you use Twitter? I’d like to follow you if that wouyld be okay.
I’m undoubtedly eenjoying your blog and look forward to new
posts.
Also visit my web-site :: binance
Robertpearl · August 4, 2023 at 11:24 pm
https://evelink.es/domain/snus1.wiki
RandallILEdity · August 4, 2023 at 11:37 pm
лучшие казино рунета
https://shishamag.ru
Великолепие игры на реальные деньги раскроется перед вами в “Гранд Казино Рояль”. Здесь каждый гость становится королем азартного гемблинга, получая доступ к самым качественным игровым автоматам и классическим настольным играм. Ощутите королевское наслаждение от игры в “Гранд Казино Рояль”.”Виртуальный Камень” – это магическое место, где азартный мир оживает и становится реальностью. Здесь каждый гемблер может найти свой уникальный камень удачи и испытать настоящее волшебство игры на реальные деньги. Почувствуйте магию азартного мира в “Виртуальном Камне” и откройте для себя удивительные возможности.
ysghgjOxife · August 4, 2023 at 11:39 pm
На сайте https://algoritmo-home.ru вы сможете подобрать освещение, роскошную дизайнерскую мебель. При этом результат вам точно понравится, потому как специалисты создают такой уникальный проект, который будет полностью соответствовать вашим предпочтениям. Дизайнеры работают в данной сфере давно и в обязательном порядке учитывают все тонкости, требования, предпочтения клиентов, чтобы они получили именно то, что хотят. Разнообразные коллекции позволят найти то, что нужно для создания идеальной концепции.
web page · August 4, 2023 at 11:50 pm
This will enabhle you to get a fesel forr the numerous internet
sites out there — and there are a lot.
my web page :: web page
JamesBop · August 4, 2023 at 11:51 pm
https://chorus-nnsu.ru/oblastnoj-sisteme-profobrazovanija-pskovskij-oblasti-nuzhna-perezagruzka/
RandallILEdity · August 5, 2023 at 12:25 am
список казино
казино топ
Представьте себе место, где каждый ваш шаг определяется судьбой. В “Казино Вечной Удачи” вас ждут уникальные игры и увлекательные слоты, где удача становится вашим верным союзником. Играйте смело и доверьтесь своей судьбе в “Казино Вечной Удачи”.Выбрав одно из топовых онлайн казино 2023 года, вы откроете для себя удивительный мир азартных развлечений и возможность сорвать крупный куш. Не упустите шанс испытать адреналин и стать частью захватывающего мира азартных игр. Удачи вам и ярких эмоций в мире онлайн казино!
Ramonsaise · August 5, 2023 at 12:28 am
скачать приложение покердом на андроид бесплатно
https://www.englishteachers.ru/forum/index.php?app=core&module=members&controller=profile&id=99420&tab=field_core_pfield_30
Мы позаботились о том, чтобы вас окружало максимальное удобство во время игры. Наша команда разработчиков работала не покладая рук, чтобы создать стабильный клиент, способный принести вам массу положительных эмоций. Мы знаем, что ваше время ценно, поэтому никаких задержек и зависаний. У нас только плавный и быстрый геймплей.PokerDom Casino ? это место, где игроки становятся настоящими победителями. Мы уверены, что именно у вас есть все шансы сорвать крупный куш и стать обладателем виртуального золота. Скачайте наш клиент на ПК и окунитесь в мир азартных приключений с комфортом, который вы заслуживаете.
AurelioPrody · August 5, 2023 at 1:02 am
ремонт бмв цены
uslanKar · August 5, 2023 at 1:29 am
На сайте https://cifroom.ru/ вы сможете ознакомиться с огромным ассортиментов товаров, таких как: смартфоны, планшеты, комплектующие для ПК, ПК и ноутбуки, различные гаджеты, роботы пылесосы и многое другое. Отличные цены на товар, доставка в любые регионы, большой ассортимент, удобный поиск, описания и характеристики каждого товара – все это у нас на сайте.
JamieDoria · August 5, 2023 at 2:11 am
prednisolone prednisone: prednisone 2.5 mg cost – prednisone 40 mg rx
Ramonsaise · August 5, 2023 at 2:11 am
скачать покердом бесплатно на телефон
https://forum.live-show.com/user/63592-wergas/
Сомневаетесь, с чего начать свою азартную экскурсию? Не волнуйтесь, наша служба поддержки всегда готова помочь вам сделать правильный выбор. Мы гордимся своим профессионализмом и готовы ответить на все ваши вопросы в режиме реального времени. Забудьте о неопределенности, с PokerDom Casino вы всегда будете на верном пути к успеху.Казино PokerDom является надежным и проверенным партнером, предоставляющим клиентам высочайший уровень безопасности и честности игры. Скачать и установить клиент PokerDom на ваш ПК – это просто и удобно, открывая двери к захватывающим моментам и увлекательным игровым автоматам.
kraqaNek · August 5, 2023 at 2:17 am
Авто по подписке https://xn—–6kcimguq5abbjcc5af.xn--p1ai/ это удобный способ не обладая своим автомобилем иметь возможность передвигаться. Авто по подписке это свобода передвижения без привязки к одному автомобилю.
gghornrique · August 5, 2023 at 2:18 am
На сайте https://neotechcom.ru/ вы сможете приобрести концентраты СОЖ, а также антиспаттеры. Эта компания уже в течение длительного времени работает в данной сфере и занимается разработкой инновационной и революционной технологии СОЖ. Сотрудники накопили огромный опыт. Сейчас это уверенный и надежный поставщик, который предоставляет на продукцию необходимые гарантии. Сопровождение клиента по вопросам, профессиональные консультации от лучших менеджеров. Концентраты произведены в лабораторных условиях.
cialis 20mg · August 5, 2023 at 2:18 am
prescriptions from canada without Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Robertpearl · August 5, 2023 at 2:30 am
https://seoanalyzertool.org/domain/nikotiinipussit.ink
RandallILEdity · August 5, 2023 at 2:55 am
интернет казино
https://shishamag.ru
“Легендарный Джекпот” – словно сокровищница невероятных выигрышей и приключений. Это место, где каждый игрок может найти свою удачу и испытать неповторимые ощущения от азартных игр. “Легендарный Джекпот” предлагает широкий выбор игровых автоматов и настольных игр, которые покорят ваше сердце с первого спина.”Волшебный Колодец Удачи” – словно волшебная палочка, он подарит вам сокровища и возможности. Казино “Волшебный Колодец Удачи” – это идеальное место для тех, кто ищет уникальные игры и необычные возможности. Здесь вы сможете испытать удачу в специальных турнирах и акциях, которые откроют перед вами двери в мир невероятных выигрышей.
biteme · August 5, 2023 at 3:01 am
My гlatives every time say that Ι am wastingg my time here at net, however I know I am getting familiarity every day by reading such
good posts.
Ramonsaise · August 5, 2023 at 3:21 am
pokerdom официальный сайт скачать мобильную версию
http://nedvigimost.bbok.ru/viewtopic.php?id=18307
Погрузитесь в захватывающий мир азартных игр с PokerDom Casino – официальным сайтом, предлагающим уникальные возможности для игры в слоты на реальные деньги и многое другое. PokerDom Casino – это истинный рай для любителей азартных развлечений, где каждый найдет что-то по своему вкусу.Ощутите магию момента, когда барабаны слотов закрутятся, а выжидание результата превратится в настоящее испытание удачи. PokerDom Casino гарантирует честность и безопасность каждой игры, потому что мы ценим доверие наших игроков. Вы можете быть спокойны, ваши данные защищены самыми надежными технологиями, а азартные баталии полностью справедливы.
RandallILEdity · August 5, 2023 at 5:17 am
казино
интернет казино на деньги
“Атмосфера Шанса” – это словно путешествие в мир магии и удачи. Ведь онлайн казино как “Атмосфера Шанса” – это не просто игра, это настоящее искусство азарта и развлечения. Здесь вас ждет множество увлекательных игр, от классических слотов до современных многопользовательских рулеток, которые откроют перед вами двери в захватывающий мир выигрышей и богатства.Онлайн казино – это невероятный микс эмоций и впечатлений, где каждый может найти свою удачу. Это как путешествие по волшебной стране, где каждый уголок пропитан азартом и тайнами. Особенно привлекательны онлайн казино на реальные деньги, ведь ощущение риска и возможность выиграть крупный приз делают игру еще более захватывающей.
Robertpearl · August 5, 2023 at 5:38 am
https://seo-checker.in/domain/killa1.live
Djewpy · August 5, 2023 at 6:04 am
fenofibrate 200mg usa buy tricor no prescription tricor online order
riyabplura · August 5, 2023 at 6:37 am
На сайте https://korporativnye-spory.ru/ оформите заявку для того, чтобы воспользоваться услугами центра разрешения корпоративных вопросов. В компании работают квалифицированные, опытные сотрудники, которые знают все нюансы и готовы предложить вам лучшее решение вопроса. Специалисты готовы выявить мошенничество, воровство, а также восстановить контроль над компанией. В миссию компании входит и разделение активов. Здесь трудятся оценщики, адвокаты, юристы, специалисты, обеспечивающие безопасность.
hannaCow · August 5, 2023 at 6:59 am
На сайте https://la2-anons.com/ ознакомьтесь с анонсами серверов. Важным моментом является то, что информация на портале регулярно обновляется, что поможет каждому игроку быть первым среди зарегистрированных. Каждый день открываются европейские, зарубежные серверы с донатом либо без него, различные рейты. Игра принесет радость, а также удовольствие всем категориям геймеров. Для того чтобы быстро выбрать, необходимо воспользоваться всем функционалом портала. На этом сервисе имеется все необходимое для вашего веселого и интересного времяпрепровождения.
Tannerdyday · August 5, 2023 at 7:02 am
kraken зеркала
cripto_emaic · August 5, 2023 at 8:04 am
https://obmenyat-kriptovalyutu-onlajn.com/
uhammgeora · August 5, 2023 at 8:44 am
На сайте https://sobr26.ru оставьте свой телефон для того, чтобы вам перезвонили и проконсультировали по поводу персональной охраны. Компания давно и на профессиональном уровне организует охрану недвижимости, имущества. Физическая охрана предоставляется более 20 лет. Компания смогла заполучить огромное количество постоянных клиентов, которые рекомендуют ее своим знакомым. Предоставляется полный комплекс услуг, а потому вы выберете то, что необходимо. На предприятии работают свои монтажные бригады, отвечающие за качество.
Robertpearl · August 5, 2023 at 8:44 am
http://tools.avetis.co/domain/killa.life
THESHG4 · August 5, 2023 at 9:09 am
Thanks for finally talking about > Drone Hardware & programming – Teqto System < Loved it!
EmilySmorb · August 5, 2023 at 9:11 am
онлайн казино покердом
https://robotsinmyhome.com/blog/ras-robot-elderly/
Онлайн казино 2023: Вперед в Мир Виртуального Азарта!Лучшие бонусы: Впереди только Призы
JohnSSEdity · August 5, 2023 at 9:24 am
казино онлайн на деньги
casino
Новые технологии и инновации делают онлайн казино настолько привлекательными, что многие игроки предпочитают именно этот формат азартных игр. Онлайн казино обеспечивают высокий уровень комфорта и доступности, что позволяет игрокам наслаждаться игрой в любое время и в любом месте, где есть доступ к интернету.”Атмосфера Успеха”: Вдохновение для победы.
bnftwWam · August 5, 2023 at 9:50 am
По ссылке https://play.google.com/store/apps/details?id=com.sn2ake3bat5tle вы сможете сделать ставки у надежного букмекера «Фонбет», который давно находится на рынке и предлагает высокие коэффициенты и огромное количество различных спортивных состязаний. Саму компанию основали в 1994 году. Сейчас она считается лидером в России. Букмекер работает на территории России абсолютно легально, а потому вам не придется переживать за выплаты. Если возникли спорные ситуации, то все вопросы решаются при помощи ЦУПИС.
EmilySmorb · August 5, 2023 at 10:54 am
покердом казино
http://starstruck45.music.coocan.jp/bbs00011/taku07/bbs39.cgi?num=1280
Итак, друзья, если вы готовы окунуться в мир виртуального азарта, держитесь крепче, ибо наше путешествие начинается прямо сейчас!PokerDom Casino ? это место, где азарт воплощается в самых разнообразных формах. Здесь вы найдете огромный выбор лицензионных автоматов от ведущих мировых разработчиков, которые предоставляют уникальные и захватывающие игры с невероятной графикой и звуковым сопровождением. Наши слоты перенесут вас в иные миры и уголки времени, где каждое вращение барабанов обещает новые приключения.
Milfordsledy · August 5, 2023 at 11:06 am
Правильный мужской эромассаж Пермь цена
Deaconempixelm · August 5, 2023 at 11:24 am
anchor
Robertpearl · August 5, 2023 at 11:41 am
https://www.seopro.tools/domain/killa1.xyz/iWOR64ba1e91d267f
JohnSSEdity · August 5, 2023 at 11:52 am
обзор казино
казино
Самые широкие врата к азартным победам открываются для вас в “Атлантик Гейт Казино”. Здесь, словно на пороге неизведанного мира, вы найдете самые популярные слоты, настольные игры и возможность сорвать крупный джекпот. Необычные бонусы и акции будут сопровождать вас во время игры, открывая перед вами новые горизонты возможностей.”Волшебный Колодец Удачи” – словно волшебная палочка, он подарит вам сокровища и возможности. Казино “Волшебный Колодец Удачи” – это идеальное место для тех, кто ищет уникальные игры и необычные возможности. Здесь вы сможете испытать удачу в специальных турнирах и акциях, которые откроют перед вами двери в мир невероятных выигрышей.
JamieDoria · August 5, 2023 at 11:56 am
canadian online pharmacy prednisone: buy prednisone online australia – iv prednisone
EmilySmorb · August 5, 2023 at 12:34 pm
pokerdom
http://rem.4nmv.ru/forum/profile.php?action=show&member=4982
Наша команда разработчиков уделяет особое внимание качеству и удобству клиента. Ведь вам наверняка не хочется терять драгоценное время на ожидание загрузки игр. Мы сделали все возможное, чтобы вы могли сосредоточиться на самой игре, наслаждаясь моментом и адреналином, а не отвлекаться на технические нюансы.Наши слоты ? это не только стандартные азартные автоматы. Здесь вы найдете редкие синонимы классических игр, эксклюзивные слоты, которые вы не встретите больше нигде. Наша команда творческих разработчиков уделяет особое внимание каждой детали, чтобы вам было интересно даже после многих часов игры.
Milfordsledy · August 5, 2023 at 12:44 pm
Отборный частный эротический массаж Пермь выбрать лучший
сделать чеки на гостиницу в москве · August 5, 2023 at 1:24 pm
Hello! I could have sworn I’ve been to this blog before but after going through a few of the posts I realized it’s new to me. Anyways, I’m definitely pleased I found it and I’ll be bookmarking it and checking back frequently!
velmableaf · August 5, 2023 at 1:27 pm
На сайте https://kinoturk.net/ вы сможете ознакомиться с огромной коллекцией фильмов и сериалов Турции, а также смотреть онлайн. Новые турецкие фильмы и сериалы постоянно пополняются, есть коллекции за прошлые годы. Можно выбрать жанр и посмотреть в высоком качестве. Смотреть онлайн турецкие фильмы на любом устройстве на нашем сайте.
CoreyHeela · August 5, 2023 at 1:34 pm
cat casino официальный сайт вход
кэт казино
Добро пожаловать в захватывающий мир азартных развлечений Cat Casino — великолепного онлайн казино 2023 года, где вы сможете не только скачать игровые автоматы, но и наслаждаться игрой в режиме онлайн. Отправьтесь в увлекательное путешествие по кругосветному казино Cat, где вас ждут беспрецедентные приключения и море адреналина.Виртуальное казино Cat Casino поразит вас своим стильным дизайном и простым, интуитивно понятным интерфейсом. Здесь каждый игрок сможет скачать игровые автоматы на свое устройство и наслаждаться игрой в любое удобное время. Но если вы предпочитаете онлайн-формат, то также можно играть прямо на сайте казино без необходимости скачивать что-либо.
EmilySmorb · August 5, 2023 at 1:45 pm
pokerdom
http://lunwele.co.za/index.php/component/k2/item/5?start=23290
Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.Среди наших игр, вы обязательно найдете что-то подходящее для себя: от захватывающих приключений в древности до космических фантазий будущего. Почувствуйте себя героем книги в слотах с уникальным сюжетом или отправьтесь в опасное космическое путешествие в игре с футуристической тематикой.
JamesBop · August 5, 2023 at 1:57 pm
https://kirov.bezformata.com/listnews/uslugi-chastnogo-narkologa-v-kirove/101848759/
JohnSSEdity · August 5, 2023 at 2:10 pm
онлайн казино топ
казино
Самые широкие врата к азартным победам открываются для вас в “Атлантик Гейт Казино”. Здесь, словно на пороге неизведанного мира, вы найдете самые популярные слоты, настольные игры и возможность сорвать крупный джекпот. Необычные бонусы и акции будут сопровождать вас во время игры, открывая перед вами новые горизонты возможностей.Великолепие игры на реальные деньги раскроется перед вами в “Гранд Казино Рояль”. Здесь каждый гость становится королем азартного гемблинга, получая доступ к самым качественным игровым автоматам и классическим настольным играм. Ощутите королевское наслаждение от игры в “Гранд Казино Рояль”.
Robertpearl · August 5, 2023 at 2:23 pm
https://seochecker.work/domain/disposable-vape.wiki
LouisSaf · August 5, 2023 at 2:25 pm
недорогое продвижение сайтов
JAHSRDF7 · August 5, 2023 at 2:38 pm
Good day! Would you mind if I share your blog with my twitter group?
There’s a lot of people that I think would
really enjoy your content. Please let me know.
Cheers
LouisSaf · August 5, 2023 at 4:05 pm
seo для нового сайта
EugeneAmurb · August 5, 2023 at 4:10 pm
грузчики курск
Marianep · August 5, 2023 at 4:19 pm
Благодаря 3d печать petg , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
anosoplend · August 5, 2023 at 5:00 pm
На сайте https://piter-xxx.net вы сможете выбрать девушку на вечер, для расслабления в выходной день. Все нимфы роскошные, презентабельного внешнего вида, имеют красивые черты лица, упругое, подтянутое тело, молодую кожу. Девушки сделают все для того, чтобы вы остались довольны сервисом, получили от общения с ними только приятные эмоции и захотели вернуться к ним вновь. Время, проведенное с нимфетками, обойдется недорого.
Robertpearl · August 5, 2023 at 5:04 pm
https://seofaktor.de/domain/siberia1.site
EugeneAmurb · August 5, 2023 at 5:36 pm
грузчики прокопьевск
LouisSaf · August 5, 2023 at 5:42 pm
оптимизация рекламной кампании яндекс директ
chnmkcrupe · August 5, 2023 at 5:45 pm
На сайте https://uslugi-santehnikov.ru/ вы сможете воспользоваться услугами сантехника и получить профессиональную консультацию прямо сейчас. Сантехник выполняет самые разные виды работ и на профессиональном уровне. Со всем перечнем услуг вы сможете ознакомиться чуть ниже. В компании установлены привлекательные и доступные расценки, чтобы воспользоваться услугами смогли все желающие. Работы выполняются на профессиональном уровне, а сантехник выезжает на объект максимально оперативно. Он определяет причину поломки и быстро ее устраняет.
News_rhymn · August 5, 2023 at 6:37 pm
поздравления дедушке
EugeneAmurb · August 5, 2023 at 6:58 pm
грузчики щелково
olgazChurl · August 5, 2023 at 7:00 pm
По ссылке https://play.google.com/store/apps/details?id=com.sn2ake3bat5tle вы сможете сделать ставки в старейшей БК «Фонбет», которая вызывает доверие у любителей азарта. Она начала свою деятельность в далеком 1994 году. Зарегистрироваться на сайте вы сможете через мобильный телефон. Идентификация проводится несколькими способами. Однако самым практичным и проверенным является удаленный, при помощи видеозвонка. БК регулярно устраивает акции. Новые игроки получают 2000 рублей, если воспользуются приложением.
LouisSaf · August 5, 2023 at 7:19 pm
раскрутка сайта в яндексе
Marianep · August 5, 2023 at 7:46 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать выплавляемых моделей для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Robertpearl · August 5, 2023 at 7:51 pm
https://seitenwert.eu/domain/siberia.wiki
JulieOdove · August 5, 2023 at 7:59 pm
покердом
http://88.99.242.97/component/k2/item/8-voda/8-voda.html?start=3950
Любимым моментом многих наших игроков является возможность играть в лицензионные автоматы различных производителей, таких как NetEnt, Microgaming, Play’n GO и многих других. Каждый из них предлагает уникальный геймплей, увлекательные бонусы и огромные джекпоты, которые можно выиграть в один момент. Это как съемка звезд с неба на игровом поле, где каждый вращающийся символ ? шанс на большую победу.Слоты же, являются настоящим хитом современных онлайн казино. Уникальные тематики, необычные символы и яркие анимации погружают вас в другой мир, где каждый спин может принести невероятные призы и фантастические бонусы.
free id for roblox voice Chat · August 5, 2023 at 8:04 pm
I am curious to find out what blog system you happen to
be using? I’m experiencing some small security issues with my latest website and I’d like to find something more secure.
Do you have any solutions?
EugeneAmurb · August 5, 2023 at 8:25 pm
московские грузчики
yqcvsAmino · August 5, 2023 at 8:43 pm
На сайте https://krasotkaepil.ru/ вы сможете ознакомиться с салоном диодной лазерной эпиляции в Москве. Услуги оказываются как женщинам, так и мужчинам. Лазерная эпиляция, косметология, массаж, акции салона дают возможность получить услуги высочайшего качества по приемлемым ценам, а наши квалифицированные косметологи подарят вам внимание и высокий уровень обслуживания.
LouisSaf · August 5, 2023 at 9:01 pm
продвижение сайта туристической компании
Официальный сайт дэдди Казино · August 5, 2023 at 9:07 pm
Spot on with this write-up, I actually think this amazing site
needs a great deal more attention. I’ll probably be back again to read through
more, thanks for the info!
JulieOdove · August 5, 2023 at 9:43 pm
покердом казино
https://forum.bn.ru/index.php?showtopic=73881
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск закончился ? ведь здесь вас ждут невероятные призы, клиент на ПК высочайшего качества и самые лицензионные автоматы, которые окунут вас в океан азарта.Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.
JamieDoria · August 5, 2023 at 9:45 pm
cheap doxycycline 100mg: cheapest doxycycline uk – doxycycline 100mg tabs
EugeneAmurb · August 5, 2023 at 9:50 pm
подработка грузчиком оплата
siliyeErato · August 5, 2023 at 10:10 pm
На сайте https://dosug66.ru вы найдете такую девушку, с которой забудете обо всем. На это время вы будете ее господином. И самое главное, что здесь находятся только красивые, привлекательные дамы, которые точно сведут вас с ума. Здесь молодые красотки, готовые радовать вас своими ласками, нежностями. Есть возможность подобрать даму с самыми разными параметрами и любой внешности. Имеются девушки с голубыми, карими глазами, а также длинными или короткими волосами. Они обрадуют своей красотой и женственным вешним видом.
Robertpearl · August 5, 2023 at 10:48 pm
https://seo.hostsinimo.com/domain/nikotiinipussit.us
EugeneAmurb · August 5, 2023 at 10:52 pm
работа грузчиком свежие вакансии оплата ежедневная
Marianep · August 5, 2023 at 10:59 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать заказать для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
JulieOdove · August 5, 2023 at 11:25 pm
покердом казино
http://sdm-servis.ru/component/fireboard/?func=view&catid=5&id=62959
Среди ключевых конкурентных преимуществ топовых казино будет доступность адаптивных версий для мобильных устройств, что позволит наслаждаться азартом даже в пути. Также, предсказываем увеличение числа криптовалютных казино, что обеспечит более анонимные и безопасные транзакции.Казино Покердом известно не только своими увлекательными слотами, но и привлекательными бонусами, которые порадуют как новичков, так и опытных игроков. Мы гордимся своей программой лояльности, где каждый ваш депозит превращается в ценные призы. И это еще не все! У нас проводятся регулярные турниры и акции, которые увеличивают ваши шансы на победу во многие разы. Взлетите на вершину успеха с PokerDom Casino!
2krn · August 5, 2023 at 11:43 pm
Please let me know if you’re looking for a article writer for
your blog. You have some really great posts and I think I would be a
good asset. If you ever want to take some of the load off, I’d love to write some articles for
your blog in exchange for a link back to mine. Please blast
me an e-mail if interested. Regards!
EugeneAmurb · August 5, 2023 at 11:57 pm
услуги грузчиков донецк
JulieOdove · August 6, 2023 at 12:38 am
покердом
https://callcpolart.pl/index.php/component/k2/item/2-be-kind-whenever-possible?start=4010
Любимым моментом многих наших игроков является возможность играть в лицензионные автоматы различных производителей, таких как NetEnt, Microgaming, Play’n GO и многих других. Каждый из них предлагает уникальный геймплей, увлекательные бонусы и огромные джекпоты, которые можно выиграть в один момент. Это как съемка звезд с неба на игровом поле, где каждый вращающийся символ ? шанс на большую победу.Не упустите шанс стать частью нашей большой игровой семьи. PokerDom Casino ждет именно вас! Скачайте наш клиент на ПК прямо сейчас, погрузитесь в мир захватывающих слотов на реальные деньги и наслаждайтесь лучшими лицензионными автоматами от ведущих разработчиков. Помните, PokerDom Casino ? это место, где рождаются азартные победы и где каждый игрок ощущает себя по-настоящему удачливым!
yabsqBed · August 6, 2023 at 12:50 am
Сайт https://asiakino.org/ это огромная коллекция азиатских фильмов, сериалов, мультфильмов, аниме которые можно смотреть онлайн в высоком качестве на любом устройстве. Азиатские фильмы и сериалы постоянно пополняются новинками, а также собрана коллекция лучших и любимых фильмом и сериалов за прошлые годы.
EugeneAmurb · August 6, 2023 at 1:13 am
грузчик перевозить
Robertpearl · August 6, 2023 at 1:41 am
https://seoanalyzer.gr/domain/nordic-spirit.gay
CoreyHeela · August 6, 2023 at 1:55 am
cat casino скачать
cat casino
Но не думайте, что Cat Casino ограничивается только игровыми автоматами. Мы предлагаем вам погрузиться в мир настоящего азарта, выбрав игру за живым столом в разделе Live Казино. Там вас ожидает настоящий дилер, с которым вы сможете почувствовать себя в роли настоящего игрока, соревнующегося за крупные выигрыши.Заходите на официальный сайт Кэт Казино и откройте для себя мир невероятных возможностей. Мы гарантируем вам волшебные эмоции, незабываемые приключения и бесконечный азарт. Кот-символ нашего казино приведет вас к сокровищам и удаче, а вы станете настоящими хозяевами игрового мира.
EugeneAmurb · August 6, 2023 at 2:21 am
грузчики ростов на дону
slots · August 6, 2023 at 2:26 am
My coder is trying to persuade me to move to .net from PHP.
I have always disliked the idea because of the costs. But he’s tryiong none the less.
I’ve been using WordPress on numerous websites for
about a year and am worried about switching to another
platform. I have heard good things about blogengine.net.
Is there a way I can import all my wordpress posts into it?
Any help would be really appreciated!
bisaidcibra · August 6, 2023 at 2:44 am
На сайте https://avoshop.ru/catalog/avoshop/570/ узнайте всю подробную информацию, а затем закажите «Авошоп». Этот модуль необходим для интеграции с 1С с любыми маркетплейсами. На сайте вы сможете получить всю необходимую информацию об этом продукте, почитать о его достоинствах, особенностях и том, как он работает. Важным моментом является то, что первые полгода обновлений вы получите в подарок. Чуть ниже представлены расценки на базовый модуль, рассчитанный на различное количество времени.
marasClorn · August 6, 2023 at 3:07 am
На сайте https://keyfinans.ru/ отправьте заявку для того, чтобы воспользоваться бухгалтерскими услугами. Здесь же ознакомьтесь с расценками для компаний, ИП, а также банкротных компаний. Сотрудники предприятия готовы встретиться с вами в любое время и обсудить ваше предложение. Для каждого клиента предусмотрено парковочное место. В офисе всегда работает бесплатный интернет, которым можно воспользоваться в любое время. Есть возможность воспользоваться как юридическими, так и бухгалтерскими услугами.
EugeneAmurb · August 6, 2023 at 3:35 am
работа грузчиком в пензе
porn · August 6, 2023 at 4:18 am
Pretty section of content. I just stumbled upon your
blog and in accession capital to assert that I get
in fact enjoyed account your blog posts. Anyway I’ll be subscribing to
your feeds and even I achievement you access consistently
rapidly.
JulieOdove · August 6, 2023 at 4:20 am
онлайн казино покердом
http://diablomania.ru/forum/showthread.php?t=72388
Среди наших игр, вы обязательно найдете что-то подходящее для себя: от захватывающих приключений в древности до космических фантазий будущего. Почувствуйте себя героем книги в слотах с уникальным сюжетом или отправьтесь в опасное космическое путешествие в игре с футуристической тематикой.Чтобы начать, просто скачайте наш клиент на ПК ? это удобное приложение, которое позволит вам получить максимум удовольствия от игры. Загрузка занимает всего несколько минут, а установка проходит быстро и без проблем. Затем вы сможете войти в свой аккаунт и окунуться в мир бесконечных возможностей.
Jerrygeate · August 6, 2023 at 4:22 am
https://guialocal.cl/seonza.html
Jeremypem · August 6, 2023 at 4:28 am
http://www.heromachine.com/forums/users/dadlace09/
Uk Escort Forum · August 6, 2023 at 4:38 am
Post writing is also a excitement, if you be acquainted with afterward you can write or else it is complex to
write.
Robertpearl · August 6, 2023 at 4:39 am
https://www.lacivertmedya.com/seo-analizi/domain/disposable-vape.art
EugeneAmurb · August 6, 2023 at 5:13 am
вакансии для мужчин грузчиком
Marianep · August 6, 2023 at 5:24 am
Благодаря 3d принтер изготовление деталей на заказ , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
bitchslap · August 6, 2023 at 5:26 am
Ƭhanks for the ցood writeup. It in fact was a leisure account it.
Glance compⅼex too far brоught agreeable from you!
Βy the way, how could we be in contact?
Gambling site · August 6, 2023 at 5:45 am
They are a new Gambling site operator that is developing in popularity each day.
cci 250 Primers · August 6, 2023 at 5:57 am
Thanks for sharing your info. I truly appreciate your efforts and I am waiting for
your further write ups thanks once again.
JulieOdove · August 6, 2023 at 6:00 am
онлайн казино покердом
https://solartechnik-ahrensburg.de/index.php/component/k2/item/3-these-cases-are-perfectly-simple-and-easy-to-distinguish?start=2460
Почему PokerDom Casino считается одним из лидеров в мире азартных игр? Это просто! У нас вы найдете настоящую разнообразность игр для каждого вкуса. Независимо от того, являетесь ли вы страстным поклонником классических слотов или предпочитаете новейшие 3D-автоматы с уникальными сюжетами ? у нас есть все, чтобы удовлетворить ваше желание играть в Казино Покердом. Приготовьтесь к взрыву эмоций, когда вращающиеся барабаны принесут вам выигрыши!PokerDom Casino ? это место, где азарт воплощается в самых разнообразных формах. Здесь вы найдете огромный выбор лицензионных автоматов от ведущих мировых разработчиков, которые предоставляют уникальные и захватывающие игры с невероятной графикой и звуковым сопровождением. Наши слоты перенесут вас в иные миры и уголки времени, где каждое вращение барабанов обещает новые приключения.
EugeneAmurb · August 6, 2023 at 6:28 am
грузчик без посредников
binance · August 6, 2023 at 7:07 am
naturally like your web-site however youu need tto check the spelling on several of your posts.
Several of them aare rife with spelling problems and I find it
very bothersome to tell the truth however I will certainly comee back again.
my wweb page – binance
JulieOdove · August 6, 2023 at 7:36 am
pokerdom
https://www.wedjat.ru/forum/profile/10459-lohet/
Не забывайте, что игра в онлайн казино на реальные деньги – это веселое развлечение, но она должна быть ответственной. Поставьте себе лимиты на ставки и не рискуйте больше, чем можете позволить себеНаши слоты ? это не только стандартные азартные автоматы. Здесь вы найдете редкие синонимы классических игр, эксклюзивные слоты, которые вы не встретите больше нигде. Наша команда творческих разработчиков уделяет особое внимание каждой детали, чтобы вам было интересно даже после многих часов игры.
Robertpearl · August 6, 2023 at 7:36 am
https://seoanalyzer.dotseotools.com/domain/disposable-vapes.us
amaraVer · August 6, 2023 at 7:36 am
На сайте https://mirkrovli-kmv.ru/ вы сможете заказать фасадные, кровельные материалы от популярной компании, которая давно работает в этой сфере и предлагает лучшие условия для сотрудничества. В компании вы сможете приобрести водосточные системы, ограждения, заборы, различные изоляционные материалы и другое. Ежедневно для вас организуются акции, действуют скидки, которые помогут совершить более выгодную покупку. Вся продукция реализуется по доступной цене. Ознакомиться с позициями можно на портале.
EugeneAmurb · August 6, 2023 at 7:37 am
грузчики 18
aliygriViarm · August 6, 2023 at 7:39 am
На сайте https://mirena-apteka.ru вы сможете воспользоваться поиском и найти самую низкую цену на спираль Мирена в аптеках вашего города. Внутриматочная гормональная спираль Мирена по лучшей цене, с возможностью бронирования, без предоплаты на нашем сайте. Инструкция Мирена также доступна на сайте. Заказы принимаются круглосуточно.
JamieDoria · August 6, 2023 at 7:48 am
doxycycline tablets where to buy: how to get doxycycline online – buy doxycycline without prescription uk
BrianMearp · August 6, 2023 at 8:12 am
https://nhklin.ru
Marianep · August 6, 2023 at 8:38 am
Благодаря 3d печать сайт , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JulieOdove · August 6, 2023 at 8:43 am
сайт покердом
http://foundation.unilag.edu.ng/index.php/component/k2/item/3-life-is-a-series-of-natural-changes?start=6700
Добро пожаловать в удивительный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете захватывающий опыт игры в онлайн-слоты на реальные деньги, ваш поиск закончился ? ведь здесь вас ждут невероятные призы, клиент на ПК высочайшего качества и самые лицензионные автоматы, которые окунут вас в океан азарта.Итак, если вы готовы окунуться в мир увлекательных приключений, PokerDom Casino ждет вас! Не упустите свой шанс стать победителем и ощутить волнение азарта прямо у себя дома. Скачайте клиент на ПК, зарегистрируйтесь и начните играть в слоты на реальные деньги уже сегодня! Приготовьтесь к захватывающему путешествию в мир PokerDom Casino, где удача всегда на вашей стороне!
EugeneAmurb · August 6, 2023 at 8:50 am
грузчики недорого
ykovsben · August 6, 2023 at 9:42 am
На сайте https://terrasy66.ru/ закажите террасную доску в огромном ассортименте и по привлекательным ценам. Есть вариант подобрать самый разный цвет: коричневый, венге, рябина, ясень. Все конструкции выполнены из качественных, надежных материалов, что позволит им прослужить долгое время без потери качественных характеристик и внешнего вида. Компания является лидером в сфере строительства крыльца, ступеней. Также можно заказать монтаж террас из ДПК. В компании работают настоящие профессионалы, у которых имеется все необходимое оборудование.
EugeneAmurb · August 6, 2023 at 10:05 am
грузчики уфа вакансии
BrianMearp · August 6, 2023 at 10:08 am
http://studyru.ru
Robertpearl · August 6, 2023 at 10:29 am
https://www.webdotsolution.com/website-analyser/domain/pablo-snus.shop
EugeneAmurb · August 6, 2023 at 11:13 am
перевозка грузов с грузчиками недорого
junkyard cocoa fl · August 6, 2023 at 11:26 am
Appreciation to my father who told me on the topic
of this website, this webpage is in fact remarkable.
my web-site junkyard cocoa fl
FnhtgfHeers · August 6, 2023 at 11:45 am
На сайте https://legalbet.ru/ вы сможете сделать ставки на спорт. Здесь только легальные букмекерские конторы, которые регулярно выплачивают средства, никогда не обманывают своих клиентов. Кроме того, они предлагают высокие коэффициенты, огромный выбор спортивных состязаний и все то, что поможет не только заработать много денег, но и получить положительные, приятные эмоции. Этот портал собрал только объективный, прозрачный рейтинг, а потому ему можно доверять. Здесь также находятся и честные отзывы тех, кто уже воспользовался услугами БК.
Marianep · August 6, 2023 at 11:50 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать алюминием для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
BrianMearp · August 6, 2023 at 11:53 am
http://la-paskal-ufa.ru
stanisemura · August 6, 2023 at 12:16 pm
Строительная компания Строймаксгрупп https://stroymaxgroup.ru/ это многолетний опыт в проектировании и строительстве, инженерных сетях, а также отделке. Компания работает по всей Тульской области, а полный список услуг на нашем сайте, включая проекты различных домов. Можно воспользоваться удобным калькулятором расчета и составить смету строительства.
ariyetttouct · August 6, 2023 at 1:08 pm
На сайте https://pelenki38.ru/ вы сможете приобрести качественные, надежные, удобные и неприхотливые в носке подгузники для взрослых или детей, пеленки для домашних животных. Все изделия выполнены из износостойких, качественных материалов, которые не натирают, не провоцируют дискомфорта, поэтому кожа продолжает дышать. Совершайте покупки на официальном сайте, где установлены доступные цены, а доставка происходит в короткие сроки. На оптовые заказы действуют привлекательные расценки.
Robertpearl · August 6, 2023 at 1:10 pm
https://seodash.online/domain/siberia1.pro
BrianMearp · August 6, 2023 at 1:34 pm
https://zachetkaweb.ru
Jerrygeate · August 6, 2023 at 2:35 pm
https://online71605.blogerus.com/30664603/consideraciones-a-saber-sobre-las-mejores-agencias-de-marketing-digital-chile
ver hentai · August 6, 2023 at 2:59 pm
Hello it’s me, I am also visiting this web page on a regular basis,
this site is really nice and the viewers are really sharing fastidious
thoughts.
Marianep · August 6, 2023 at 3:02 pm
Благодаря 3d печать скульптур , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Jeremypem · August 6, 2023 at 3:05 pm
https://online71605.blogerus.com/30664603/consideraciones-a-saber-sobre-las-mejores-agencias-de-marketing-digital-chile
BrianMearp · August 6, 2023 at 3:13 pm
https://trezvogruz.ru
Robertpearl · August 6, 2023 at 3:46 pm
https://analyzeseo.net/domain/disposable-vapes.shop
BrianMearp · August 6, 2023 at 4:50 pm
http://diplom-expert.ru
cialis online · August 6, 2023 at 4:57 pm
canadian mail order pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Free Masturbation Porn · August 6, 2023 at 5:07 pm
Hi there I am so delighted I found your blog page,
I really found you by accident, while I was researching on Google for
something else, Regardless I am here now and would just like to say kudos
for a tremendous post and a all round exciting blog (I also love the theme/design), I don’t have time to read it
all at the moment but I have book-marked it and also added in your
RSS feeds, so when I have time I will be back to read a
great deal more, Please do keep up the awesome b.
JamieDoria · August 6, 2023 at 5:41 pm
cheap doxycycline: doxycycline cheap – how can i get doxycycline
Marianep · August 6, 2023 at 6:10 pm
Благодаря 3d печать людей , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
BrianMearp · August 6, 2023 at 6:24 pm
http://za4eti.ru
xfuvadaX · August 6, 2023 at 6:24 pm
Группа компаний Складская техника https://vilochnyi.ru/ много лет осуществляет поставки складской техники. Мы продаем как новую, так и б/у технику, запчасти для автопогрузчиков. Занимаемся ремонтом и техобслуживанием техники, выкупаем б/у модели, предоставляем в аренду складскую технику. На сайте вы сможете воспользоваться удобным поиском вилочных погрузчиков, ричтраков, штабелеров. Купить вилочный погрузчик с доставкой очень просто!
Robertpearl · August 6, 2023 at 6:28 pm
https://freetoolpro.com/domain/nicotine-pouches.cc
evseeTak · August 6, 2023 at 7:57 pm
На сайте https://smmform.com/ воспользуйтесь такой важной, нужной услугой, как раскрутка, а также продвижение социальной сети, независимо от вашей сферы деятельности. Предприятие предлагает исключительно инновационные, уникальные методики продвижения, которые обязательно принесут свои плоды и помогут вам в достижении цели. В компании работают высококлассные профессионалы, которые знают, что вам предложить, чтобы бизнес пошел в гору. Ознакомьтесь с новостями, а также рекомендациями от лучших специалистов.
ndfl_rhymn · August 6, 2023 at 8:02 pm
Основы налога на доходы физических лиц
BrianMearp · August 6, 2023 at 8:03 pm
http://interioproject.ru
rovaapeeds · August 6, 2023 at 8:51 pm
На сайте https://rundament.ru/ вы сможете воспользоваться услугами компании, которая практикуется на строительстве домов из арболита. Все дома являются комфортными, надежными и качественными, а потому идеально подходят для жизни. Все сооружения создаются из высокотехнологичных, качественных материалов, за счет чего прослужат очень долго. Прямо сейчас ознакомьтесь с расценками домов из арболита. К важным преимуществам обращения в компанию является то, что вы получите сооружение идеального качества.
Colleenbrode · August 6, 2023 at 9:05 pm
покердом
https://merland.ru/Insterburg/insterburg.html
Наша команда профессиональной поддержки всегда готова ответить на ваши вопросы и помочь вам в случае возникновения сложностей. Мы ценим каждого игрока и гарантируем конфиденциальность данных, а также честность и надежность всех наших игр.Ответственная игра: Успех в Контроле
Marianep · August 6, 2023 at 9:13 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать людей для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Robertpearl · August 6, 2023 at 9:21 pm
https://sisidigitaltools.com/website-reviewer/domain/snusexpress.life
CoreyHeela · August 6, 2023 at 9:28 pm
cat casino регистрация
cat casino официальный сайт
Cat Casino — это не просто место, где можно скачать игровые автоматы, но и целая история, в которую вы станете главным героем. Каждый щелчок вашего курсора — это ключ к захватывающему миру азарта, где каждая ставка открывает новые горизонты. Наше казино предлагает уникальный дизайн и яркие персонажи, созданные нашей командой талантливых художников, чтобы вы могли окунуться в мир фантазии и выигрышей.Лицензия и безопасность: Ваши интересы на первом месте
karta_Gox · August 6, 2023 at 9:30 pm
https://karta-banka-rf.ru/sovety/
BrianMearp · August 6, 2023 at 9:37 pm
https://rusreferats.ru
Colleenbrode · August 6, 2023 at 10:42 pm
pokerdom
http://datalinktechnologies.co.uk/index.php/component/k2/item/10-photographer-and-her-bunny?start=1360
Во-вторых, PokerDom Casino предлагает скачать клиент на ПК для еще более удобного и плавного игрового процесса. Благодаря скачиванию клиента, у вас будет быстрый доступ ко всем играм и функциям казино, а также высокое качество графики и безупречная производительность. Забудьте о задержках и зависаниях ? у нас вы получите максимум удовольствия от игры.PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.
online casino · August 6, 2023 at 10:52 pm
Keep on working, great job!
ikheerep · August 6, 2023 at 11:08 pm
На сайте https://pr-global.ru/ оставьте заявку для того, чтобы воспользоваться услугами агентства интернет-маркетинга. Квалифицированные, опытные сотрудники предпримут все возможное для того, чтобы увеличить продажи при помощи продвижения ресурса. Оставьте заявку и получите бесплатный аудит. Со всем комплексом услуг вы сможете ознакомиться на сайте и подобрать подходящий для себя вариант. Ознакомьтесь с портфолио прямо сейчас, чтобы быстрее принять правильное решение. Все услуги оказываются по привлекательной стоимости.
BrianMearp · August 6, 2023 at 11:08 pm
https://royalseo.ru
ambivalencë · August 6, 2023 at 11:22 pm
Hello, I enjoy reading all of your article post. I wanted to
write a little comment to support you.
elavil 50 mg australia · August 7, 2023 at 12:11 am
sildenafil cost sildenafil usa cheap sildenafil
Marianep · August 7, 2023 at 12:15 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать в медицине для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Robertpearl · August 7, 2023 at 12:15 am
https://app.demanzo.com/domain/snus1.info
Colleenbrode · August 7, 2023 at 12:17 am
онлайн казино покердом
http://getcars.ru/communication/blog/weblogs/122/185/
Что делает PokerDom Casino особенным? Во-первых, это официальный сайт с прозрачными правилами и надежной системой защиты данных. Здесь вы можете играть с уверенностью в том, что ваша конфиденциальность и финансовая безопасность находятся под надежной защитой. Мы принимаем лицензирование нашего казино очень серьезно и стремимся предоставить нашим клиентам только лучшее.Онлайн казино 2023 года предлагают не только игры на реальные деньги, но и новые технологии, которые делают процесс гемблинга еще более захватывающим. Виртуальная реальность становится все популярнее, и некоторые казино уже предлагают возможность окунуться в 3D мир азарта и ощутить настоящую атмосферу казино прямо из своего дома.
BrianMearp · August 7, 2023 at 12:40 am
http://referatuz.ru
Colleenbrode · August 7, 2023 at 1:17 am
сайт покердом
https://hellaslife.com/sports-scoreboard-for-tuesday-june-27-2023/
Итак, если вы готовы окунуться в мир увлекательных приключений, PokerDom Casino ждет вас! Не упустите свой шанс стать победителем и ощутить волнение азарта прямо у себя дома. Скачайте клиент на ПК, зарегистрируйтесь и начните играть в слоты на реальные деньги уже сегодня! Приготовьтесь к захватывающему путешествию в мир PokerDom Casino, где удача всегда на вашей стороне!Онлайн казино 2023 года предлагают не только игры на реальные деньги, но и новые технологии, которые делают процесс гемблинга еще более захватывающим. Виртуальная реальность становится все популярнее, и некоторые казино уже предлагают возможность окунуться в 3D мир азарта и ощутить настоящую атмосферу казино прямо из своего дома.
Korean Casino Site · August 7, 2023 at 1:21 am
Korean Casino Site.org is
not a gambling operator, no gambhling facilities are supllied
on this website.
BrianMearp · August 7, 2023 at 2:11 am
http://disslib.ru
Robertpearl · August 7, 2023 at 3:12 am
https://audit.textstone.com/domain/snus3.ink
BrianMearp · August 7, 2023 at 3:43 am
http://assistent-student.ru
Colleenbrode · August 7, 2023 at 4:39 am
покердом казино
http://przedszkolejp2.pl/item/6-slide-1?start=27440
Среди наших игр, вы обязательно найдете что-то подходящее для себя: от захватывающих приключений в древности до космических фантазий будущего. Почувствуйте себя героем книги в слотах с уникальным сюжетом или отправьтесь в опасное космическое путешествие в игре с футуристической тематикой.Не упустите шанс стать частью нашей большой игровой семьи. PokerDom Casino ждет именно вас! Скачайте наш клиент на ПК прямо сейчас, погрузитесь в мир захватывающих слотов на реальные деньги и наслаждайтесь лучшими лицензионными автоматами от ведущих разработчиков. Помните, PokerDom Casino ? это место, где рождаются азартные победы и где каждый игрок ощущает себя по-настоящему удачливым!
daachkaru · August 7, 2023 at 5:13 am
Link exchange is nothing else but it is simply placing the other person’s weblog link on your page at proper place and other person will also do same for you.
evilinPen · August 7, 2023 at 5:14 am
На сайте https://angelcharlie.ru/ вы сможете заказать Техпомощь на дороге в Москве. Если сломалась машина — Дядя Чарли поможет! Мы оказываем автопомощь, выезд автоэлектрика, авто и мотоэвакуатор, а цены вас приятно удивят. Огромный перечень услуг и квалифицированные специалисты обязательно вам помогут от замены колеса и подвоза топлива до запуска двигателя и вскрытия автомобиля.
turpirraf · August 7, 2023 at 5:53 am
Сайт https://t.me/s/win1_russia представляет собой официальный новостной портал, на котором вы сможете найти всю необходимую информацию об уникальном и популярном проекте 1win. Здесь только свежие, информативные данные, ознакомиться с которыми необходимо всем, кто интересуется данной сферой. На портале регулярно появляются новые, свежие данные от экспертов, которые постоянно находятся в поисках актуальных данных. В этой же группе вы найдете промокод для более зрелищной игры. Заходите сюда регулярно для того, чтобы почерпнуть что-то новое.
Robertpearl · August 7, 2023 at 6:07 am
https://www.seobegin.com/domain/elf-bar1.ink
Colleenbrode · August 7, 2023 at 6:17 am
покердом казино
http://там.com/index.php/blog-6/item/2-type-makes-a-difference-an-exploration-of-type-focused-websites.html?start=360
Конкуренция среди онлайн казино стимулирует их предлагать игрокам все более выгодные бонусы и акции. В 2023 году лучшие казино будут баловать своих посетителей различными приятными сюрпризами. Начиная от приветственных бонусов и фриспинов, заканчивая лотереями и розыгрышами крупных джекпотов – все это ждет вас в мире онлайн азарта.Наша команда профессиональной поддержки всегда готова ответить на ваши вопросы и помочь вам в случае возникновения сложностей. Мы ценим каждого игрока и гарантируем конфиденциальность данных, а также честность и надежность всех наших игр.
Marianep · August 7, 2023 at 6:21 am
Благодаря 3d печать прототипов , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
BrianMearp · August 7, 2023 at 6:48 am
https://beregnn.ru/index.html
uardigLew · August 7, 2023 at 7:01 am
На сайте https://ceresit-market.ru/ приобретите продукцию популярной марки Ceresit. Все поставки осуществляются напрямую с завода, минуя посредников, а, значит, и наценки. Именно поэтому получится приобрести все необходимое по вполне доступным ценам. При этом качество остается неизменно высоким. У компании имеется собственный склад, на котором хранятся все необходимые товарные запасы. Организуется доставка по всей России. Если появились вопросы, то вы сможете получить на них ответ, спросив менеджера.
KeithPhada · August 7, 2023 at 7:23 am
cat casino вход
кэт казино
На страницах Cat Casino, Кэт Казино вы обнаружите широкий выбор игровых автоматов с различными сюжетами и механиками. Мы уверены, что вам будет интересно испытать удачу в наших эксклюзивных слотах, которые вы не найдете больше нигде. Каждый автомат — это уникальная история с невероятными приключениями и кратерами возможностей. От древних пирамид до далеких галактик — у нас есть слоты на любой вкус.Добро пожаловать в захватывающий мир развлечений на официальном сайте Cat Casino! В 2023 году у вас есть уникальная возможность скачать самые захватывающие игровые автоматы и играть онлайн на нашем портале. Казино сменило владельца и теперь готово порадовать своих посетителей совершенно новыми игровыми впечатлениями.
TOGeorgetix · August 7, 2023 at 7:38 am
http://cheapjerseysbay.com
Colleenbrode · August 7, 2023 at 7:53 am
сайт покердом
https://orionbilisim.net/index.php/component/k2/item/4-how-to-create-contents-get-traffic?start=7080
Но далеко не только лицензии делают нас уникальными. Мы предлагаем намного больше, чем просто игру. PokerDom Casino ? это настоящее игровое путешествие, где каждый шаг сопровождается волнительными возможностями и бонусами. Кстати, говоря о бонусах, у нас они просто захлестывают своим многообразием! Будьте уверены, у нас найдется что-то особенное именно для вас.PokerDom Casino не останавливается на достигнутом и постоянно развивается. Мы следим за последними тенденциями игровой индустрии и постоянно пополняем наш ассортимент новыми увлекательными играми и технологическими новинками. Все это для того, чтобы сделать ваше путешествие по миру азарта еще ярче и насыщеннее.
Gennadyizex · August 7, 2023 at 8:01 am
покердом на андроид
http://karkadan.ru/users/96305
Как выразить огромное многообразие игровых возможностей, предоставляемых PokerDom Casino? Это словно сказочный калейдоскоп азартных чудес, где каждый из наших автоматов словно отдельная живая вселенная, в которую вам предстоит окунуться! Испытайте ошеломляющие эмоции от игры на наших автоматах и ощутите на себе силу и величие настоящего азарта.PokerDom Casino ? это воплощение безграничных возможностей для всех поклонников азартных игр. Наше казино олицетворяет собой уникальное сочетание стиля, высокого качества, и самого разнообразного ассортимента игровых автоматов. Вас ждет абсолютно новый уровень азартного веселья, где каждый участник становится настоящим героем своего игрового приключения.
Richardhiz · August 7, 2023 at 8:01 am
игровые автоматы онлайн
https://engineeredair.com/?URL=https://football-yuga.ru
Теперь у вас есть возможность окунуться в удивительный мир онлайн казино 2023 года и испытать настоящий азарт на реальные деньги. Выберите своё топовое казино и отправляйтесь в захватывающее путешествие за крупными призами и великими победами! Помните, что азартные игры предназначены только для взрослых, играйте ответственно и удачи вам в ваших азартных приключениях!”Лунное Казино” – это загадочное и волшебное место, где каждый игрок может открыть врата удачи. Здесь у вас есть шанс испытать необычные слоты с неожиданными бонусами и уникальными игровыми механиками. Блеск луны освещает ваш путь к великим победам и невероятным призам. Забудьте о повседневной рутине, окунитесь в мир магии азарта вместе с “Лунным Казино”!
AntonioLak · August 7, 2023 at 8:04 am
бонус код для казино cat
https://turist-v-evrope.ru
Cat Casino предлагает не только скачивать игровые автоматы, но и играть онлайн в прямом эфире. Наша передовая технология позволяет вам наслаждаться азартом без задержек и с блестящей графикой. Забудьте о скучных ожиданиях и долгих загрузках — у нас каждый клик становится мгновенной реакцией, а каждый выигрыш — настоящим триумфом.Заходите на официальный сайт Кэт Казино и откройте для себя мир невероятных возможностей. Мы гарантируем вам волшебные эмоции, незабываемые приключения и бесконечный азарт. Кот-символ нашего казино приведет вас к сокровищам и удаче, а вы станете настоящими хозяевами игрового мира.
evseequipt · August 7, 2023 at 8:21 am
На сайте https://aquarida-tour.kz/ вы сможете забронировать тур для своего незабываемого отдыха. В каталоге имеются отели, дома отдыха, пансионаты и многое другое. При необходимости вы сможете получить консультацию наиболее комфортным для себя способом. Турфирма отличается огромным опытом, а потому готова предложить вам лучшие варианты для незабываемого отдыха. Вы сможете приобрести туры в такие страны, как: Таиланд, Кипр, ОАЭ, Франция, Испания, Болгария, а также Чехия. Выбирайте только комфортный отдых.
BrianMearp · August 7, 2023 at 8:23 am
http://profsutd.ru
Callieskago · August 7, 2023 at 8:30 am
http://bellagente.ru
goaldaddy · August 7, 2023 at 8:36 am
Ahaa, its nice conversation concerning this
article here at this blog, I have read all that,
so at this time me also commenting here.
Robertpearl · August 7, 2023 at 9:02 am
https://seoreport.steveshaw.me/domain/nikotiinipussi1.pro
kulikpar · August 7, 2023 at 9:18 am
На сайте https://www.mnogodivanov.ru/ вы сможете приобрести качественную, надежную мебель, которая выполнена из современных материалов. Вот почему она не утратит внешнего вида длительное время. Есть кресла, функциональные диваны, вместительные шкафы, широкие кровати, тумбы и многое другое, что сделает ваш интерьер неповторимым, стильным и разнообразным. Огромный ассортимент вариантов позволит подобрать то, что идеально впишется в общую концепцию. При необходимости воспользуйтесь консультацией первоклассного менеджера.
Colleenbrode · August 7, 2023 at 9:25 am
покердом казино
https://granadaeconomica.es/2022/11/18/001-420/
PokerDom Casino следит за новыми тенденциями и постоянно развивается. Мы стараемся быть на шаг впереди и предоставлять вам самые передовые технологии и возможности для игры. Наш сайт адаптирован под все устройства, так что вы можете играть в наши слоты на реальные деньги даже с вашего смартфона или планшета.Мы понимаем, что каждый игрок уникален, поэтому PokerDom Casino предлагает персонализированный подход к каждому из вас. Мы ценим вашу преданность и готовы щедро вознаградить за нее. Уникальная программа лояльности PokerDom Casino даст вам дополнительные привилегии и бонусы, чтобы ваш путь к азартным победам был еще более увлекательным.
Marianep · August 7, 2023 at 9:27 am
Благодаря 3d печать скульптуры , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
AntonioLak · August 7, 2023 at 9:32 am
казино cat коды
https://turist-v-evrope.ru
Кэт Казино берет на себя ответственность за безопасность всех своих игроков. Мы предоставляем только лицензионное программное обеспечение, а также используем самые современные технологии шифрования, чтобы обеспечить абсолютную конфиденциальность информации. Вам не нужно беспокоиться о своих данных – они находятся под надежной защитой.Каждый, кто хоть раз побывал на официальном сайте Cat Casino, сразу погружается в захватывающую атмосферу и уникальное общение с персонажами, которые будто оживают на экране вашего устройства. Казино Cat Casino сделано с заботой о своих пользователях, и это заметно с первых минут взаимодействия с игровыми автоматами.
Colleenbrode · August 7, 2023 at 9:37 am
сайт покердом
http://gorodkanash.ru/user/oezyynb/
Добро пожаловать в удивительный мир азартных развлечений! Покердом, также известный как PokerDom Casino, представляет собой ведущий официальный сайт онлайн-казино, где вы сможете испытать неподражаемые ощущения и стать участником захватывающих азартных сражений. Покердом Казино предлагает вам широкий выбор слотов на реальные деньги, а также клиент на ПК для настоящих ценителей качественного геймплея.Итак, вы готовы испытать настоящий азарт и узнать, что приготовила для вас удача? Покердом Казино открывает свои двери для вас. Скачайте наш клиент на ПК или играйте онлайн прямо сейчас и окунитесь в захватывающий мир азартных игр. Здесь каждый найдет что-то особенное и уникальное. Добро пожаловать в PokerDom Casino, где рождаются настоящие азартные победы!
Richardhiz · August 7, 2023 at 9:44 am
лучшие казино онлайн
http://n2ch.net/x?u=https://football-yuga.ru
“Казино Империя”: Власть, богатство и азарт”Вегас Виктория” – Воплощение Азартной Мечты
Gennadyizex · August 7, 2023 at 9:51 am
покердом мобильное приложение
https://floobits.com/Gennadyibag
Мы гордимся тем, что PokerDom Casino стал домом для тысяч азартных сердец. Здесь вас ждут не только увлекательные автоматы, но и возможность почувствовать настоящий дух соперничества в наших турнирах. Участвуя в соревнованиях, вы откроете для себя совершенно новую сторону азарта и узнаете, что значит быть настоящим чемпионом.Не упустите возможность стать частью захватывающей игровой атмосферы PokerDom Казино.
BrianMearp · August 7, 2023 at 9:57 am
http://studreadywork.ru
Marianut · August 7, 2023 at 11:02 am
http://abm-motors.ru
AntonioLak · August 7, 2023 at 11:32 am
cat casino официальный войти
кэт казино
Cat Casino — это не просто место, где можно скачать игровые автоматы, но и целая история, в которую вы станете главным героем. Каждый щелчок вашего курсора — это ключ к захватывающему миру азарта, где каждая ставка открывает новые горизонты. Наше казино предлагает уникальный дизайн и яркие персонажи, созданные нашей командой талантливых художников, чтобы вы могли окунуться в мир фантазии и выигрышей.Наша команда Cat Casino ждет вас с нетерпением. Приготовьтесь к невероятной азартной одиссее и станьте частью истории успеха и удачи. Успех и крупные выигрыши ждут именно вас на Cat Casino!
Gennadyizex · August 7, 2023 at 11:36 am
скачать приложение покердом на андроид
http://forum.dozory.ru/bbs/profile.php?mode=viewprofile&u=1977585
PokerDom Casino предлагает вам огромный выбор игровых автоматов, созданных самыми известными разработчиками. Благодаря этому, вам гарантированы высококачественная графика, захватывающие сюжеты и непревзойденная игровая механика. На сайте PokerDom вы сможете найти как классические слоты, полные традиций и ностальгии, так и современные видео-слоты с интересными бонусными раундами.Как выразить огромное многообразие игровых возможностей, предоставляемых PokerDom Casino? Это словно сказочный калейдоскоп азартных чудес, где каждый из наших автоматов словно отдельная живая вселенная, в которую вам предстоит окунуться! Испытайте ошеломляющие эмоции от игры на наших автоматах и ощутите на себе силу и величие настоящего азарта.
Adelaide · August 7, 2023 at 11:37 am
I’m amazed, I have to admit. Seldom ddo I encounter
a blog that’s both equally educative and amusing, and let me tell you, you’ve hit
the nail on the head. The problem is something which not enough men and women are speaking
intelligently about. I am very happy that I stumbled across this in my search
for something relating to this.
Feel free to visit my blog … binance (Adelaide)
Шкафы · August 7, 2023 at 11:52 am
[url=https://kupit-shkaf-kupe-moskva1.ru/]Шкафы-купе купить[/url]
Мебельная фабрика проектирует и еще изготавливает шкафы-купе на Москве по отдельным габаритам чтобы жилых а также офисных помещений.
Шкафы-купе купить
Robertpearl · August 7, 2023 at 11:53 am
https://analyseor.com/domain/disposable-vape.art
바이낸스 · August 7, 2023 at 12:12 pm
I’ve been exploring for a little bit for any high-quality articles or weblog posts oon this kind of space .
Explorng in Yahoo I finally stumbled upon this site. Studying this info So i’m happy to show that I’ve an incredibly excellent uncanny
feeling I found out just what I needed. I such a
lot undoubtedly will make certain to do not put out of your mind this
website and provides it a glance regularly.
Feel free to surf to my web-site :: 바이낸스
Египет · August 7, 2023 at 12:16 pm
[url=https://egypt-tours-2023.ru/]Туры в Египет[/url]
Если является япония, которая втюривает в себе раз-два первой моменты, то этто Египет. Спирт пленяет собственною красотой, темпераментом, натурой, а главное — многовековыми тайнами, ут этих периодов приставки не- разгаданными важнейшими умами человечества.
Туры в Египет
Marianep · August 7, 2023 at 12:36 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать услуги для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
TheresaAgorO · August 7, 2023 at 1:02 pm
http://ivanpoukhkal.ru
AntonioLak · August 7, 2023 at 1:08 pm
cat casino бонус коды
cat casino официальный сайт
Cat Casino — это лучшее место для настоящих ценителей азартных игр и фанатов виртуальных развлечений! Если вы ищете надежное казино с огромным выбором игровых автоматов, а также возможностью играть онлайн в любое время, то Кэт Казино — ваш идеальный выбор в 2023 году!Как начать играть на Cat Casino? Это проще простого! Просто зарегистрируйтесь на нашем официальном сайте и получите эксклюзивный доступ к нашему казино. Для удобства наших игроков, мы разработали мобильное приложение Cat Casino, которое позволит вам наслаждаться азартом в любом месте и в любое время.
Deloresjat · August 7, 2023 at 1:17 pm
http://sex-s-krasotkoy.me
Gennadyizex · August 7, 2023 at 1:18 pm
покердом официальный сайт
https://www.corporativosigma.com.mx/component/k2/item/9-inicio?start=1200
Каждый клик мыши в PokerDom Casino становится ключом в мир азартных тайн. Наши слоты как живые существа, которые реагируют на каждое ваше решение и отважное ставку. Вы становитесь режиссером своего азартного фильма, где каждая сцена ? это увлекательный спин на наших автоматах, а каждый персонаж ? это уникальный символ собственного счастья.Если вы ищете место, где можно получить максимум удовольствия от игры в слоты на реальные деньги, вы нашли его! PokerDom Casino ? это безупречный выбор тех, кто стремится к качественному и увлекательному азартному опыту. У нас собраны лишь самые лучшие автоматы, предоставленные лидерами игровой индустрии, что обеспечивает вам непревзойденное качество и надежность каждой игры.
AntonioLak · August 7, 2023 at 1:21 pm
cat casino код
https://turist-v-evrope.ru
Безопасность и конфиденциальность каждого игрока – приоритет Cat Casino. Казино использует передовые технологии шифрования данных, чтобы обеспечить защиту всех транзакций и личной информации. Вы можете быть уверены в том, что ваш опыт в Cat Casino будет абсолютно безопасным и надежным.Не упустите возможность окунуться в мир азарта и развлечений на Cat Casino уже сегодня! Скачайте уникальные игровые автоматы и играйте онлайн вместе с нами. Почувствуйте вкус победы и адреналин от ставок прямо у себя дома или в пути. Cat Casino – ваш путь к лучшим игровым впечатлениям в 2023 году!
Gennadyizex · August 7, 2023 at 1:32 pm
pokerdom на андроид
https://moujmasti.com/member.php?237022-GennadyiVew&tab=activitystream&type=friends
Каждый день в PokerDom Casino ? это новый повод испытать удачу и открыть для себя что-то новое. Наши слоты как фантастические книги, каждый из которых хранит свои сокровища и загадки. Мы приглашаем вас в путешествие по земле азартных сокровищ, где вас ждут не только денежные выигрыши, но и уникальные эмоции.Мы гордимся тем, что PokerDom Casino стал домом для тысяч азартных сердец. Здесь вас ждут не только увлекательные автоматы, но и возможность почувствовать настоящий дух соперничества в наших турнирах. Участвуя в соревнованиях, вы откроете для себя совершенно новую сторону азарта и узнаете, что значит быть настоящим чемпионом.
MatthewAdumn · August 7, 2023 at 1:36 pm
электрокарниз
Шкафы · August 7, 2023 at 1:46 pm
[url=https://kupit-shkaf-kupe-moskva1.ru/]Шкафы-купе купить[/url]
Мебельная фотофабрика проектирует и еще производит шкафы-купе на Столице по отдельным габаритам для квартирных а также конторских помещений.
Шкафы-купе купить
Египет · August 7, 2023 at 2:16 pm
[url=https://egypt-tours-2023.ru/]Туры в Египет[/url]
Разве что есть страна, что влюбляет в себе раз-два первоначальной минуты, так это Египет. Спирт завораживает собственною кралей, темпераментом, естеством, а главное — многовековыми тайнами, до этих пор не осознанными лучшими интеллектами человечества.
Туры в Египет
Robertpearl · August 7, 2023 at 2:30 pm
https://sitesearch.net/domain/elf-bar1.wiki
DanielIEtix · August 7, 2023 at 2:36 pm
http://political-humor.net
MatthewAdumn · August 7, 2023 at 2:37 pm
электрокарниз
PatrickPsype · August 7, 2023 at 2:42 pm
покердом официальный сайт
https://syncdentallab.com/hello-world/
Не откладывайте свою удачу на потом, потому что она ждет вас прямо сейчас на официальном сайте PokerDom Casino. Скачайте клиент на ПК или просто войдите в мир азарта через браузер, и пусть удача всегда будет на вашей стороне!PokerDom Casino – это не просто платформа для игр, это целый мир, где каждый находит своё увлечение. Чудесные слоты приведут вас в древние пирамиды, на далёкие планеты или в сказочные королевства. Постарайтесь не потеряться в этом лабиринте развлечений, и вы будете вознаграждены выигрышами, которые порой кажутся совсем нереальными.
pradokep · August 7, 2023 at 2:57 pm
По ссылке https://play.google.com/store/apps/details?id=com.ball.circular69journey вы сможете сделать ставки в популярной БК «Олимпбет». Она принимает ставки на самые разные виды спорта. Однако основная специализация – это хоккей, футбол, баскетбол. Но также предусмотрен и киберспорт, американский футбол. Эта компания считается относительно немолодой, работает на рынке с 2012 года. Для того чтобы осуществлять свою деятельность, букмекерская контора получила лицензию. Отзывы об этой компании только положительные из-за того, что она честно выполняет свою работу.
Milenazex · August 7, 2023 at 3:01 pm
покердом зеркало
http://anima-rpg.com/member.php?action=profile&uid=247965
Наше казино ? это как живой организм, который постоянно развивается и обновляется. Мы следим за последними тенденциями и всегда идем в ногу со временем. В PokerDom вы найдете самые актуальные и популярные игры, которые обязательно порадуют вас своим качеством и уникальностью.Покердом Казино – это не только слоты, но и захватывающие турниры и игры с живыми дилерами. Примите участие в наших турнирах и почувствуйте настоящий дух соперничества. Возможность соревноваться с другими игроками и побеждать привносит ощущение истинной победы и удовлетворения.
Pamelavax · August 7, 2023 at 3:02 pm
http://bg-pr.ru
junkyards in lexington · August 7, 2023 at 3:21 pm
Hello to every body, it’s my first pay a visit
of this blog; this website consists of remarkable and truly fine information in favor of visitors.
Also visit my web page :: junkyards in lexington
Marianep · August 7, 2023 at 3:41 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать пластиком в минске для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
MatthewAdumn · August 7, 2023 at 3:50 pm
купить электрокарнизы
MaxineBlome · August 7, 2023 at 4:11 pm
avlvaVobby · August 7, 2023 at 4:16 pm
Вскрытие замков в Ставрополе https://lockzamok.ru/ это бесплатный вызов специалиста, низкие цены, гарантия. Аварийное вскрытие замков от LOCKZAMOK это опыт, квалификация, отсутствие повреждений, профессиональный ремонт и замена любых запорных механизмов. Работаем круглосуточно и максимально оперативно.
PatrickPsype · August 7, 2023 at 4:24 pm
клиент покердом
https://whitingfarmestates.com/photos/attachment/08210416/
Для тех, кто предпочитает почувствовать истинный драйв и волнение, PokerDom Casino предлагает скачать клиент на ПК. Это значит, что теперь у вас будет свой уголок азарта, доступный в любое время, когда вас посетит желание испытать фортуну. Клиент на ПК обеспечит стабильный доступ к лучшим слотам на реальные деньги, а также предоставит эксклюзивные возможности для участия в увлекательных турнирах.Играя на PokerDom Casino, вы можете быть уверены в безопасности своих средств и личной информации. Мы предоставляем надежные и проверенные способы пополнения счета и вывода выигрышей. Вся ваша финансовая информация шифруется с использованием передовых технологий, что обеспечивает полную конфиденциальность ваших данных.
Milenazex · August 7, 2023 at 4:49 pm
pokerdom скачать на андроид на деньги
https://www.saforpress.com/2018/08/02/entrega-del-cheque-solidario-del-campus-dulcesol-la-cruz-roja-gandia/
На официальном сайте PokerDom вы найдете все, что нужно для незабываемого игрового опыта. Мы предлагаем широкий выбор лицензионных автоматов, гарантирующих честную и безопасную игру. Будь то классические слоты или современные видеоигры, у нас есть все, чтобы удовлетворить даже самых требовательных игроков.Покердом Казино – это не только слоты, но и захватывающие турниры и игры с живыми дилерами. Примите участие в наших турнирах и почувствуйте настоящий дух соперничества. Возможность соревноваться с другими игроками и побеждать привносит ощущение истинной победы и удовлетворения.
Juliewah · August 7, 2023 at 4:59 pm
http://www.about-scotland.ru/
Robertpearl · August 7, 2023 at 5:05 pm
https://seo.bodrum.tech/domain/white-fox.pro
PatrickPsype · August 7, 2023 at 6:03 pm
покердом онлайн
https://grammarsolution.com/conditional-sentences/
Один из ключевых моментов, которые делают PokerDom Casino уникальным, – это постоянное обновление игровой коллекции. Здесь вы найдете не только популярные и хорошо знакомые автоматы, но и редкие синонимы слов, которые придадут вашему опыту игры особый колорит.На Покердоме Казино представлены самые разнообразные и лицензионные автоматы, которые поражают своим разнообразием и качеством. Здесь каждый аппарат – настоящее произведение искусства, созданное изысканными дизайнерами и талантливыми разработчиками. Вам предстоит испытать на себе магию вращающихся барабанов и, возможно, разгадать тайны скрытых выигрышей.
Click Here · August 7, 2023 at 6:11 pm
My family members always say that I am wasting my time here at net, but I know
I am getting know-how daily by reading thes nice articles.
Milenazex · August 7, 2023 at 6:33 pm
скачать покердом на андроид
https://www.petboarding.us/author/milenasip/
Покердом Казино ? это место, где рождаются настоящие азартные победы. Мы ценим каждого игрока и готовы подарить вам незабываемые эмоции и яркие моменты. Если вы готовы испытать настоящее азартное приключение и окунуться в мир крупных выигрышей, то добро пожаловать к нам! Покердом ждет именно вас!Покердом Казино ? это культовый бренд, в котором сочетаются роскошь и безупречное качество сервиса. Каждый, кто заходит на наш официальный сайт, погружается в уникальный мир увлекательных игр, созданных признанными лидерами индустрии разработчиками. Здесь вы найдете только лицензионные автоматы, заслуживающие вашего внимания и доверия.
Marianep · August 7, 2023 at 6:44 pm
Благодаря 3d печать воском , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Lauranug · August 7, 2023 at 6:54 pm
http://komitetri.ru
Megangub · August 7, 2023 at 7:02 pm
usn_rhymn · August 7, 2023 at 7:13 pm
https://usn-how.ru/usn-dlya-malogo-biznesa/
PatrickPsype · August 7, 2023 at 7:37 pm
сайт покердом
https://13tka.com/what-you-should-look-for-in-a-film-camera/
Каким бы путем вы ни выбрали для входа в мир азартных развлечений, PokerDom Casino всегда будет готов предложить вам неповторимый опыт, который вы захотите повторить снова и снова. Здесь каждый сможет найти свой уголок счастья, где удача и мастерство переплетаются в удивительной гармонии.Для тех, кто предпочитает почувствовать истинный драйв и волнение, PokerDom Casino предлагает скачать клиент на ПК. Это значит, что теперь у вас будет свой уголок азарта, доступный в любое время, когда вас посетит желание испытать фортуну. Клиент на ПК обеспечит стабильный доступ к лучшим слотам на реальные деньги, а также предоставит эксклюзивные возможности для участия в увлекательных турнирах.
Robertpearl · August 7, 2023 at 7:42 pm
https://freetoolpro.com/domain/snus1.club
PatrickPsype · August 7, 2023 at 7:50 pm
pokerdom casino
https://creaspace.ru/users/profile.php?user_id=29796
Когда вы впервые войдете на официальный сайт PokerDom, вас окутает атмосфера настоящего казино, где время словно останавливается, а азарт наполняет воздух и пробуждает чувства. Вас окружат яркие баннеры с приветственными предложениями, и несколько кликов мыши отделят вас от мира увлекательных приключений.Не стоит упускать шанс испытать азарт и ощутить дыхание победы! PokerDom Casino дарит невероятные эмоции и уникальный игровой опыт, который оставит след в вашем сердце надолго. Не упустите свой шанс сорвать крупный куш, играя на официальном сайте PokerDom Casino. Скачайте клиент на ПК прямо сейчас и погрузитесь в мир азартных развлечений! Покердом Казино ждет вас!
Stephentix · August 7, 2023 at 7:54 pm
http://hampshireshakespeare.org
MatthewAdumn · August 7, 2023 at 8:05 pm
электрокарнизы
Milenazex · August 7, 2023 at 8:11 pm
покердом клиент на андроид
http://www.russian.fi/forum/member.php?u=68300
Для нас PokerDom Casino ? это не просто бизнес, это страсть и любовь к азарту. Мы стремимся сделать ваше времяпрепровождение на нашем сайте настолько насыщенным и интересным, что вы наверняка захотите вернуться снова и снова. Мы заботимся о каждом игроке и готовы радовать вас щедрыми бонусами и специальными предложениями. Ведь вы заслуживаете только самого лучшего!Кроме того, мы понимаем, что у каждого игрока свои предпочтения и стиль. Именно поэтому в PokerDom Casino вы найдете широкий выбор слотов, которые поразят вас своим разнообразием и необычностью. Каждый автомат ? это уникальная история, которая подарит вам массу эмоций и захватывающих моментов.
Milenazex · August 7, 2023 at 8:24 pm
покердом скачать
http://biowong.freehostia.com/phpbb2/viewtopic.php?t=1003340&highlight=
Наше казино ? это как живой организм, который постоянно развивается и обновляется. Мы следим за последними тенденциями и всегда идем в ногу со временем. В PokerDom вы найдете самые актуальные и популярные игры, которые обязательно порадуют вас своим качеством и уникальностью.Покердом Казино – это не только слоты, но и захватывающие турниры и игры с живыми дилерами. Примите участие в наших турнирах и почувствуйте настоящий дух соперничества. Возможность соревноваться с другими игроками и побеждать привносит ощущение истинной победы и удовлетворения.
nfilovSpima · August 7, 2023 at 8:40 pm
По ссылке https://play.google.com/store/apps/details?id=com.dice300.up523 вы сможете воспользоваться услугами популярной букмекерской компании «Лига Ставок», которая организует несколько сотен трансляций каждый день. Параллельно принимает ставки на те состязания, которые транслирует в этот момент. Вы сможете изучить статистические данные и при этом нет необходимости покидать страницу либо переходить в другое мобильное приложение. Такая опция является невероятно полезной и касается всех видов спорта.
Hermineboulp · August 7, 2023 at 8:50 pm
http://visitsalekhard.ru
PeterAmive · August 7, 2023 at 9:12 pm
покердом покер
http://forum.dozory.ru/bbs/profile.php?mode=viewprofile&u=1977567
Играть в PokerDom Casino ? это как чарующий танец в ночи, где вы партнер самой удачи. Покердом Казино дарит вам возможность стать настоящим азартным артистом, виртуозно управляющим игровыми картами и крутящим барабаны, словно магистральные рулоны судьбы.Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете возможность скачать и играть онлайн в слоты на реальные деньги, то ваш поиск находит свое завершение здесь. Покердом Казино ? это не просто игровая платформа, это целый космос азарта и волнения.
Click Here · August 7, 2023 at 9:32 pm
Greetings! Very helpful advice within this article! It is the little changes which will make the most
important changes. Many thanks for sharing!
바이낸스 · August 7, 2023 at 9:37 pm
Greetings!Very useful advice in this particular post!
It’s thhe little changes that will make the greatest changes.
Thanks a lot for sharing!
Feel free to visit my web page – 바이낸스
MatthewAdumn · August 7, 2023 at 9:39 pm
купить электрокарнизы в москве
Marianep · August 7, 2023 at 9:41 pm
Благодаря 3d печать детали , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Maxzex · August 7, 2023 at 9:51 pm
покердом мобильная версия скачать
https://www.visualchemy.gallery/forum/profile.php?id=1748976
Наша команда профессионалов готова поддержать вас на каждом этапе вашего путешествия. Мы знаем, что временами удача может перевернуться, и всегда готовы помочь вам в трудную минуту. Наши операторы поддержки всегда на связи и готовы предоставить исчерпывающую информацию и профессиональную помощь.PokerDom Casino отличается от других онлайн-казино не только своим качественным софтом, но и предлагаемыми бонусами и акциями. Здесь вы сможете получить щедрый приветственный бонус, который увеличит ваш первый депозит. Кроме того, регулярные акции и турниры позволят вам выигрывать дополнительные призы и повышать свои шансы на победу.
CarolUnubY · August 7, 2023 at 9:51 pm
chertaribimb · August 7, 2023 at 10:03 pm
https://limobi.ru/viewtopic.php?id=36845#p45117
Robertpearl · August 7, 2023 at 10:32 pm
https://seoserpo.com/public/freeseo/domain/pablo1.ink
dover_rhymn · August 7, 2023 at 10:36 pm
Как составить доверенность
Staceysauck · August 7, 2023 at 10:45 pm
http://alizamarket.ru
PeterAmive · August 7, 2023 at 10:57 pm
pokerdom casino
http://skodarapidclub.ru/forum/showthread.php?t=1282365
Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете возможность скачать и играть онлайн в слоты на реальные деньги, то ваш поиск находит свое завершение здесь. Покердом Казино ? это не просто игровая платформа, это целый космос азарта и волнения.PokerDom Casino ? это не просто казино, это искусство азартного времяпрепровождения, где каждый барабан, каждый символ становятся красками в палитре ваших игровых эмоций. В мире Покердом Казино, вы сами создаете свой игровой сценарий, вышивая его уникальными комбинациями и захватывающими раундами.
bokep mom japan · August 7, 2023 at 11:17 pm
Ԛuzlitү psts is the cruciual to invite the viewers too pay a qujck visit tthe web site, that’s what this ѡebsіtе
is prߋviding.
Maxzex · August 7, 2023 at 11:40 pm
покердом скачать на андроид apk
https://www.softstm.com/index.php/products/item/7-k2-item?start=32590
Но PokerDom Casino – это не только мир слотов. Мы предлагаем гораздо больше! Приходите и испытайте на себе азарт игры в классические карточные игры, такие как покер и блэкджек. Ощутите себя настоящим шулером и сделайте дерзкие ставки, чтобы сорвать огромный куш. В нашем казино есть место и для ценителей рулетки. Пусть шарик решит вашу судьбу и подарит вам невероятные эмоции!На PokerDom Casino вы найдете множество различных слотов, которые захватят вас своими уникальными функциями и огромными выигрышами. Они созданы ведущими провайдерами игрового софта, что гарантирует вам качество и честность каждой игры. Благодаря такому разнообразию лицензионных автоматов, каждый игрок найдет здесь что-то по своему вкусу.
mankimaf · August 8, 2023 at 12:01 am
По ссылке https://play.google.com/store/apps/details?id=com.sportingjourney2323 вы сможете зайти на сайт Sportingbet. Перед вами огромное количество видов спорта, а также различных ожидаемых событий. Контора радует нескольким десятком видов спорта. Имеется огромное количество различных состязаний. Эта букмекерская контора ведет свою деятельность на легальной основе в Бразилии. Имеет лицензию и ведет деятельность согласно местному закону. По этой причине вы можете не переживать за возможные мошеннические действия.
PeterAmive · August 8, 2023 at 12:37 am
сайт покердом
http://www.tomiki-aikido.ru/354270/ta_user_t
Загрузив клиент на ПК с официального сайта PokerDom, вы откроете для себя великолепный мир игры, где вас ожидают самые выгодные и многообещающие слоты на реальные деньги. Это как путешествие в неизведанные земли, где каждый шаг вперед открывает новые возможности для успеха.Погрузитесь в захватывающий мир азарта и волнения с официальным сайтом PokerDom Casino! Если вы ищете истинно уникальный опыт игры в онлайн-слоты на реальные деньги, то вы пришли по адресу. PokerDom Casino – это виртуальное игорное заведение, которое гарантирует незабываемые впечатления и возможность выиграть крупные суммы!
Cecilebip · August 8, 2023 at 12:41 am
https://kvest-center.ru/
Gloriafet · August 8, 2023 at 12:42 am
pull-a-part on · August 8, 2023 at 12:59 am
Thanks a bunch for sharing this with all people you really know what you’re speaking about!
Bookmarked. Kindly also consult with my website =). We may have a link
trade agreement among us
my homepage :: pull-a-part on
Jerrygeate · August 8, 2023 at 1:12 am
https://writeablog.net/farmerbreak21/residencialbaquedano-cl-el-mejor-alojamiento-en-sierra-gorda
Robertpearl · August 8, 2023 at 1:20 am
https://scan.websitetec.com/domain/nikotiinipussit.pro
Maxzex · August 8, 2023 at 1:26 am
покердом на андроид скачать бесплатно на русском
https://yashikafacility.in/index.php/component/k2/item/4/4?start=16230
PokerDom Casino – ваш верный компаньон в мире азарта и развлечений. Каждый шаг, который вы сделаете на нашем официальном сайте, будет наполнен волнением и адреналином. Как путешественник в этом захватывающем мире, вы окунетесь в атмосферу азартных игр с самыми высокими ставками, и лицензионные автоматы приведут вас к драгоценным выигрышам.Покердом Казино создан для тех, кто стремится к высоким ставкам и азартным приключениям. Вас ждут невероятные эмоции и неповторимая атмосфера игры, где каждая ставка может привести к крупному выигрышу. PokerDom Casino гарантирует быстрые и безопасные денежные операции, а также профессиональную поддержку клиентов, готовую помочь в любое время.
www.filmy4xyz · August 8, 2023 at 1:56 am
Nice blog here! Also your website lots up fast! What host are you the use of? Can I am getting your associate link on your host? I desire my site loaded up as fast as yours lol
PeterAmive · August 8, 2023 at 2:12 am
pokerdom
https://rf4game.ru/forum/index.php?/profile/80613-eqysga/
Погрузитесь в захватывающий мир азарта и волнения с официальным сайтом PokerDom Casino! Если вы ищете истинно уникальный опыт игры в онлайн-слоты на реальные деньги, то вы пришли по адресу. PokerDom Casino – это виртуальное игорное заведение, которое гарантирует незабываемые впечатления и возможность выиграть крупные суммы!Итак, вы загрузили клиент на ПК, и вам предстоит погрузиться в захватывающий мир PokerDom Casino. Здесь вы можете играть онлайн в самые популярные слоты на реальные деньги, ощущая пульс азарта и напряжение каждого спина барабанов. Это как плавание в океане возможностей, где вы сами выбираете направление своего плавания.
PeterAmive · August 8, 2023 at 2:25 am
покердом скачать клиент на пк
https://womantest.ru/viewtopic.php?id=14669
Покердом Казино ? это не просто онлайн-платформа, это настоящий азартный мир, где вы становитесь героем своей собственной истории. Играя в лицензионные автоматы PokerDom Casino, вы погружаетесь в вихрь страстей и невероятных событий, ощущая адреналин на каждом этапе игры.Погрузитесь в захватывающий мир азарта и волнения с официальным сайтом PokerDom Casino! Если вы ищете истинно уникальный опыт игры в онлайн-слоты на реальные деньги, то вы пришли по адресу. PokerDom Casino – это виртуальное игорное заведение, которое гарантирует незабываемые впечатления и возможность выиграть крупные суммы!
ElaineSNONE · August 8, 2023 at 2:41 am
http://www.arendel.ru/
Maxzex · August 8, 2023 at 3:01 am
покердом android
https://www.metalika.ua/articles/12062018.html?page=1234
PokerDom Casino – это не просто казино, это стиль жизни и уникальное сообщество единомышленников. Присоединяйтесь к нашей казино-семье, и вы откроете для себя мир безграничных возможностей и азартных приключений. У нас каждый игрок уникален и особенный, и именно вы создаете атмосферу азарта и успеха.Наша команда профессионалов готова поддержать вас на каждом этапе вашего путешествия. Мы знаем, что временами удача может перевернуться, и всегда готовы помочь вам в трудную минуту. Наши операторы поддержки всегда на связи и готовы предоставить исчерпывающую информацию и профессиональную помощь.
Maxzex · August 8, 2023 at 3:15 am
покердом приложение для андроид
https://www.zirveoto.com.tr/index.php/tr/component/k2/item/26-image-4?start=87430
Все игры представлены нашим казино полностью лицензированы, что гарантирует честность и надежность каждого раунда. Мы гордимся своей репутацией ответственного и надежного оператора, который всегда думает о своих игроках в первую очередь. PokerDom Casino – это место, где каждый игрок может почувствовать себя в полной безопасности.PokerDom Casino – ваш верный компаньон в мире азарта и развлечений. Каждый шаг, который вы сделаете на нашем официальном сайте, будет наполнен волнением и адреналином. Как путешественник в этом захватывающем мире, вы окунетесь в атмосферу азартных игр с самыми высокими ставками, и лицензионные автоматы приведут вас к драгоценным выигрышам.
AntoniaTwect · August 8, 2023 at 3:31 am
https://www.pornotyb.com/
Marianep · August 8, 2023 at 3:33 am
Благодаря 3d печать abs в минске , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Larrykeype · August 8, 2023 at 3:46 am
покердом игры
http://wmmoney.tforums.org/viewtopic.php?f=79&t=18136
Хотите испытать себя в покере? PokerDom предоставляет уникальную возможность сразиться с опытными игроками и помериться своими навыками в этой увлекательной карточной игре. Наше покерное лобби предоставляет широкий выбор столов с разными лимитами, чтобы каждый мог выбрать свой оптимальный уровень ставок.С нами вы всегда можете быть уверены в безопасности своих средств и персональных данных. PokerDom Casino предлагает быстрые и удобные способы пополнения счета и вывода выигрышей, что позволяет наслаждаться игрой, не теряя времени на длительные транзакции.
Robertpearl · August 8, 2023 at 4:10 am
https://seo-checker.in/domain/lyft1.shop
Feodorzex · August 8, 2023 at 4:38 am
покер дом онлайн
https://forum.ubuntu.ru/index.php?action=profile;u=199439
Приготовьтесь войти в увлекательный мир азарта и высоких ставок! PokerDom Casino, известное также как Покердом Казино, предлагает вам захватывающий игровой опыт прямо на вашем ПК. Этот официальный сайт казино стал популярным местом для многих азартных игроков, и не без причины.Не сомневайтесь в безопасности и надежности игры на PokerDom Casino. Мы предоставляем гарантии честности и сохранности ваших данных, чтобы вы могли сосредоточиться только на игре. Наша команда специалистов заботится о безопасности игрового процесса, чтобы вы могли наслаждаться каждой минутой в нашем казино с полной уверенностью.
Larrykeype · August 8, 2023 at 5:27 am
покердом скачать
http://strannik-v.ru/viewtopic.php?f=30&t=3641
Хотите испытать себя в покере? PokerDom предоставляет уникальную возможность сразиться с опытными игроками и помериться своими навыками в этой увлекательной карточной игре. Наше покерное лобби предоставляет широкий выбор столов с разными лимитами, чтобы каждый мог выбрать свой оптимальный уровень ставок.С нами вы всегда можете быть уверены в безопасности своих средств и персональных данных. PokerDom Casino предлагает быстрые и удобные способы пополнения счета и вывода выигрышей, что позволяет наслаждаться игрой, не теряя времени на длительные транзакции.
RosettapeP · August 8, 2023 at 6:21 am
http://www.bolshie-siski.video/
Feodorzex · August 8, 2023 at 6:29 am
pokerdom apk
http://www.kay16.jp/blog/log/1001290214.html
Погрузитесь в мир азарта и страсти с PokerDom Casino уже сегодня! Скачайте наш клиент на ПК и начните свое незабываемое путешествие в мире азартных развлечений. Вас ждут захватывающие приключения, крупные выигрыши и огромное количество радостных эмоций. Играйте, выигрывайте и наслаждайтесь каждым мгновением вашей азартной жизни в PokerDom Casino!Добро пожаловать в мир азартных приключений и адреналина! PokerDom Casino, также известный как Покердом Казино, приглашает вас окунуться в захватывающий мир азартных развлечений прямо сейчас. Не упустите возможность скачать наш клиент на ПК и насладиться волнительной игрой в слоты на реальные деньги на официальном сайте казино.
GeorgeOccum · August 8, 2023 at 6:29 am
как начать работать на вебкам Работа вебкам-моделью в Санкт-Петербурге в студии
EleanorVap · August 8, 2023 at 6:35 am
http://ecdetailing.ru
Jerrygeate · August 8, 2023 at 7:04 am
https://diigo.com/0stoex
Larrykeype · August 8, 2023 at 7:07 am
казино покердом
https://qx60-club.ru/profile.php?id=15183
Итак, не упустите свой шанс войти в удивительный мир PokerDom Casino. Вас ждут лицензионные автоматы, впечатляющие бонусы и возможность скачать клиент на ПК для максимально насыщенного азартного опыта. Подарите себе дозу адреналина и волнения прямо сейчас!С PokerDom Casino вы буквально становитесь хозяином своей судьбы, рискуя в каждой крутке барабана и виртуозно играя онлайн в слоты на реальные деньги. Здесь каждый клик – это старт новой победы. Погружаясь во вращение барабанов, вы проникаете в мир невероятных возможностей, где виртуальные монеты могут перерасти в реальное богатство.
Marianep · August 8, 2023 at 7:40 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d принтер печать для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
GeorgeOccum · August 8, 2023 at 7:49 am
как стать веб моделью Работа вебкам-моделью в Санкт-Петербурге в студии
Feodorzex · August 8, 2023 at 8:15 am
pokerdom скачать на андроид
https://onekill.net/profile?id=22524
Не просто играйте, но и побеждайте с PokerDom Casino! У нас вы можете испытать настоящий азарт и ощутить вкус сладкой победы. Наши лицензионные автоматы позволят вам реализовать свой потенциал и доказать всем, что удача всегда на вашей стороне. Дерзайте и покажите всем, что вы настоящий мастер азартных игр!Скачайте наш удобный клиент на ПК и откройте для себя бесконечный поток разнообразных игр. Неважно, что вам по душе, классические слоты с привычными символами или современные автоматы с уникальными механиками ? у нас найдется все, что нужно для настоящего азартного веселья. Покердом Казино создано с любовью к игрокам и страсти к азарту, и это чувствуется с первых минут вашей игры.
ClarkPaf · August 8, 2023 at 8:27 am
казино биткоин онлайн
아가씨 알바 · August 8, 2023 at 8:36 am
Add it all up, and you get 43% of ladies leaders saying they’re burned out, compared with 31% of
males.
My webpage … 아가씨 알바
ClarkPaf · August 8, 2023 at 9:00 am
gates of olympus online casino
Jamesdup · August 8, 2023 at 9:12 am
Explore the new sensation with [url=https://nicotine-pouches.online/bestsellers/]Best Selling Snus nicotine pouches[/url]! Taste the freshness and quality today!
Lydiasow · August 8, 2023 at 9:15 am
Larrykeype · August 8, 2023 at 9:20 am
покердом казино
http://www.gotai.net/forum/default.aspx?username=zwozue&postid=330488&forumaction=userinfo
Добро пожаловать в увлекательный мир азартных развлечений на официальном сайте PokerDom Casino! Если вы ищете надежное казино с возможностью скачать клиент на ПК и окунуться в захватывающий мир онлайн-слотов на реальные деньги, то вы пришли по адресу!PokerDom Casino ? ваш выбор, если вы ищете лучшее казино с лицензионными автоматами и возможностью играть онлайн в слоты на реальные деньги. Наше казино всегда открыто для вас, и мы рады предложить вам незабываемые моменты азартного времяпровождения. Приходите к нам и дайте фору удаче, ведь PokerDom ? это не просто казино, а настоящий источник увлечения и радости для настоящих ценителей азартных игр!
Angelvor · August 8, 2023 at 9:29 am
pin up casino app
Larrykeype · August 8, 2023 at 9:32 am
покердом казино
http://strannik-v.ru/viewtopic.php?f=30&t=3641
PokerDom Casino ? это источник непрерывного веселья и удовольствия для всех поклонников азартных игр. На нашем официальном сайте вы найдете широкий ассортимент лицензионных автоматов, которые смогут удовлетворить самые изысканные запросы ценителей азартного досуга. Наше казино предоставляет уникальные возможности для каждого игрока, не зависимо от опыта и предпочтений.Приходите к нам и окунитесь в атмосферу азартных побед и захватывающих приключений. На PokerDom Casino вас ждут яркие и красочные слоты от ведущих провайдеров игр, которые заслужено завоевали признание игроков по всему миру. Наше казино гарантирует честность и надежность игрового процесса, благодаря чему вы можете наслаждаться игрой, не беспокоясь о честности результатов.
ClarkPaf · August 8, 2023 at 9:35 am
zaza casino app
Feodorzex · August 8, 2023 at 9:51 am
скачать покердом на деньги на андроид
http://transyasu.com/component/k2/item/1-xiaomi-s-upoming-tablet-the-mi-pad-will-go-on-sale-in-beta-for-the-price-of-16-cents.html?start=29680
Как только вы начнете играть на PokerDom Casino, вас окружит захватывающая атмосфера и возможность соревноваться с игроками со всего мира. Попробуйте свои силы в различных слотах, испытайте удачу в рулетке или выиграйте в блэкджек. Покердом Казино предлагает множество игр, чтобы удовлетворить самые изысканные вкусы азартных любителей.Не сомневайтесь в безопасности и надежности игры на PokerDom Casino. Мы предоставляем гарантии честности и сохранности ваших данных, чтобы вы могли сосредоточиться только на игре. Наша команда специалистов заботится о безопасности игрового процесса, чтобы вы могли наслаждаться каждой минутой в нашем казино с полной уверенностью.
Robertpearl · August 8, 2023 at 9:53 am
https://www.seobegin.com/domain/pablo1.ink
Angelvor · August 8, 2023 at 10:02 am
tragamonedas bitcoin
Feodorzex · August 8, 2023 at 10:04 am
poker dom
http://nuans26.ru/index.php/component/k2/item/19/19?start=550
Погрузитесь в мир азарта и страсти с PokerDom Casino уже сегодня! Скачайте наш клиент на ПК и начните свое незабываемое путешествие в мире азартных развлечений. Вас ждут захватывающие приключения, крупные выигрыши и огромное количество радостных эмоций. Играйте, выигрывайте и наслаждайтесь каждым мгновением вашей азартной жизни в PokerDom Casino!Скачайте наш удобный клиент на ПК и откройте для себя бесконечный поток разнообразных игр. Неважно, что вам по душе, классические слоты с привычными символами или современные автоматы с уникальными механиками ? у нас найдется все, что нужно для настоящего азартного веселья. Покердом Казино создано с любовью к игрокам и страсти к азарту, и это чувствуется с первых минут вашей игры.
LarryCen · August 8, 2023 at 10:04 am
white milf fucked black guy
Angelvor · August 8, 2023 at 10:22 am
1wincasino
Angelvor · August 8, 2023 at 10:33 am
pin-up online casino
ClarkPaf · August 8, 2023 at 10:41 am
fairspin io
Angelvor · August 8, 2023 at 10:54 am
keno.onl
LarryCen · August 8, 2023 at 10:55 am
sex drink party
Thomasevodo · August 8, 2023 at 11:02 am
покердом скачать клиент на пк
https://forum.liquimoly.ru/index.php?/profile/36009-pauaxv/&tab=field_core_pfield_12
Покердом Казино — это не просто платформа, это мир возможностей, где каждый может найти свой путь к успеху. Скачайте приложение на ПК и отправьтесь в захватывающее путешествие по миру азарта, где каждый спин барабанов может изменить вашу судьбу. Покердом Casino ждет вас, чтобы подарить вам незабываемые эмоции и шанс покорить вершины азартных побед.Играть онлайн в слоты на реальные деньги на PokerDom Casino — это не только способ побороть рутину, но и возможность испытать адреналин на вкус. На официальном сайте Покердом Казино вы найдете огромный выбор лицензионных автоматов от ведущих поставщиков. Каждый автомат — это уникальный мир с таинственными символами и потрясающими выигрышами.
Marianep · August 8, 2023 at 11:03 am
Благодаря 3d печать керамикой в минске , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Angelvor · August 8, 2023 at 11:04 am
monopoly cas
Martinzex · August 8, 2023 at 11:29 am
покер дом
https://4komagram.com/users/240936
Казино PokerDom – это место, где азарт сочетается с надежностью и высоким качеством игрового опыта. Команда PokerDom стремится предоставить игрокам максимальное удовольствие от игры, обеспечивая честность и надежность всех игровых процессов. Вы можете быть уверены, что ваша игра будет проходить в справедливых условиях, гарантированных лицензией PokerDom Casino.Мы заботимся о наших игроках и предоставляем удобные инструменты для комфортной игры. Загрузив клиент PokerDom на ПК, вы получите доступ к эксклюзивным бонусам и акциям, которые придадут вашей игре дополнительную пикантность. Клиент работает безупречно, обеспечивая стабильность и надежность при каждом розыгрыше.
Peterautor · August 8, 2023 at 11:30 am
Демонтаж стен Москва
Демонтаж стен Москва
Peterautor · August 8, 2023 at 11:34 am
Демонтаж стен Москва
Демонтаж стен Москва
Peterautor · August 8, 2023 at 11:46 am
Демонтаж стен Москва
Демонтаж стен Москва
volkswagen tiguan 2011 · August 8, 2023 at 11:57 am
Definitely consider that that you said. Your favourite reason appeared to be on the net the simplest thing to remember of.
I say to you, I certainly get annoyed while other folks consider concerns
that they plainly do not recognize about.
You controlled to hit the nail upon the top as smartly as outlined out the entire thing
without having side-effects , folks could take a signal.
Will likely be again to get more. Thank you
Here is my blog – volkswagen tiguan 2011
Jerrygeate · August 8, 2023 at 12:04 pm
https://penzu.com/p/5013a16f
Sheilakem · August 8, 2023 at 12:07 pm
Williamdup · August 8, 2023 at 12:25 pm
Experience a new level of satisfaction with the [url=https://nicotine-pouches.online/]best nicotine pouch brand[/url]! Discover the refreshing taste and unmatched quality.
Robertpearl · August 8, 2023 at 12:38 pm
http://crmkt.com/domain/xtrime.wiki
Thomasevodo · August 8, 2023 at 12:44 pm
клиент покердом
https://www.guitar-school.ru/forum/member.php?u=27727
Не пропустите свой шанс взлететь на волнах азарта с PokerDom Casino. Этот официальный сайт Покердом Казино — это место, где мечты о больших выигрышах становятся реальностью, а каждое вращение барабанов — это шаг к завораживающим победам. Скачайте клиент на ПК, и дайте волю своей азартной природе, ведь PokerDom Casino создан для тех, кто ценит не только путь, но и каждую остановку на пути к азартной славе.Среди бескрайних онлайн-азартных просторов сияет яркая звезда под названием PokerDom Casino. Этот блестящий игровой ресурс — ваш билет в мир невероятных азартных приключений. Покердом Казино приглашает вас попробовать свою удачу, предоставив уникальную возможность скачать клиент на ПК и стать частью захватывающей виртуальной реальности.
Leonelkic · August 8, 2023 at 1:21 pm
pokerdom скачать на телефон
https://mail.portailoniria.com/node/95?page=34
Выбирайте PokerDom Casino – ваш путь к захватывающим приключениям и невероятным выигрышам. Официальный сайт PokerDom Casino ждет вас с открытыми объятиями. Скачайте клиент на ПК и погрузитесь в мир удовольствия и азарта прямо сейчас!PokerDom Casino: Возможности безграничных побед
ipoteka_viess · August 8, 2023 at 2:04 pm
https://strahovanie-ipoteki-rf.ru/
Marianep · August 8, 2023 at 2:05 pm
Благодаря 3d печать для медицины , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Candenty · August 8, 2023 at 2:21 pm
master degree essay writing service https://www.writemyessaylife.com/ community service essay fort worth
Thomasevodo · August 8, 2023 at 2:28 pm
покердом казино
http://historyntagil.ru/forum/index.php?action=profile;area=summary;u=12311
Скачать клиент на ПК — это как обрести ключ к сокровищнице невероятных выигрышей. В мире PokerDom Casino, каждый щелчок мыши — это билет в страну неограниченных азартных возможностей. Покердом Казино предлагает вам билет в будущее, где каждый клик может изменить вашу жизнь.Играя на официальном сайте PokerDom Casino, вы становитесь частью большой азартной семьи. Покердом Казино объединяет людей со всего мира, жаждущих азарта и побед. Скачайте клиент на ПК и окунитесь в мир PokerDom Casino, где каждый момент наполнен страстью и возможностью покорить новые высоты.
Noemi · August 8, 2023 at 2:50 pm
The finest solution in this regard is Betsoft, which presents an RTP of 98.99%.
Feel free to visit my homepage; http://www.kgb3000.com/guestbook.php
카지노사이트 · August 8, 2023 at 2:54 pm
Meanwhile, Google is a global search engine that is
broadly applied abou the globe.
Feel free to visit my web-site :: 카지노사이트
Peterautor · August 8, 2023 at 2:56 pm
Демонтаж стен Москва
Демонтаж стен Москва
RonaldXUdut · August 8, 2023 at 2:58 pm
казино онлайн на деньги
https://stopshies.ru
Виртуальное онлайн казино – это не только место для игры, но и место для социализации. Многие платформы предоставляют чаты, где вы можете общаться с другими игроками, обмениваться опытом и даже создавать новых друзей. Ведь азарт объединяет!Выберите свой путь в мире онлайн казино 2023 года. Победы, азарт и возможности ждут вас за каждым спином и картой. Не забывайте, что азартные игры – это развлечение для взрослых. Играйте ответственно, устанавливайте лимиты и наслаждайтесь азартными приключениями новой эпохи.
RachellKak · August 8, 2023 at 3:05 pm
Leonelkic · August 8, 2023 at 3:09 pm
покер дом отзывы
http://theglobalfederation.org/profile.php?id=1123709
Каждый игрок — это наша ценность, и мы стремимся сделать время, проведенное в PokerDom, незабываемым. Поэтому мы готовы порадовать вас щедрыми бонусами, предложениями и крупными джекпотами, которые можно выиграть в любой момент. Ведь кто сказал, что удача не может улыбнуться именно вам?Заходите на официальный сайт PokerDom и окунитесь в мир бесконечных возможностей азартных развлечений. У нас вы найдете самые лучшие слоты на реальные деньги, а также возможность скачать клиент на ПК для настоящего азартного веселья. Сделайте свою жизнь ярче и насыщеннее с PokerDom Casino — вашим путеводителем в мир азарта и удачи!
Robertpearl · August 8, 2023 at 3:12 pm
https://analytics.index.pe/domain/nikotiinipussit.site
DonaldGeala · August 8, 2023 at 3:25 pm
https://vipbit.co/
Jamesdup · August 8, 2023 at 3:29 pm
Explore the comprehensive world of [url=https://nicotine-pouches.online/nicopedia/]nicopedia[/url] and discover an amazing range of products!
GbFht1Eu16q · August 8, 2023 at 4:03 pm
460648 90615Most beneficial gentleman speeches and toasts are made to enliven supply accolade up to the wedding couple. Newbie audio system the attention of loud crowds should always think about typically the great norm off presentation, which is their private. best man speaches 554596
Thomasevodo · August 8, 2023 at 4:06 pm
покердом скачать клиент на пк
http://www.forum.procapitalist.ru/showthread.php?p=58522&mode=linear
Когда речь заходит о PokerDom Casino, это как сказка для истинных ценителей азарта. В этом уникальном Покердом Казино вы найдете все, что может желать азартный игрок: официальный сайт, лицензионные автоматы, возможность играть онлайн в слоты на реальные деньги и скачать клиент на ПК для полной иммерсии в игровой процесс.Покердом Казино — это место, где действия переплетаются с азартом. Каждый клик мыши, каждая крутка барабана — это шанс изменить свою судьбу. Официальный сайт PokerDom Casino создан для тех, кто ищет истинные острые ощущения. Присоединяйтесь к миллионам игроков, выбравших Покердом Казино в качестве своей азартной родины.
Thomasevodo · August 8, 2023 at 4:19 pm
покердом игры
https://velopiter.spb.ru/profile/94376-uwocohe/?tab=field_core_pfield_1
В мире PokerDom Casino, вы — не просто игрок, вы — азартный волшебник, способный приручить вихрь страсти и обратить его на свою пользу. Не упустите возможность скачать клиент на ПК и открыть для себя неисчерпаемый источник азартных приключений. Вас ждут лицензионные автоматы, способные подарить вам сокровища и эмоции, о которых вы даже не могли мечтать.Все лицензионные автоматы PokerDom Casino — это как ворота в азартное царство. Каждый автомат — это как волшебный камень, который может превратить вашу ставку в невероятный выигрыш. В мире PokerDom Casino, даже самые обыденные моменты становятся волшебными.
DonaldGeala · August 8, 2023 at 4:28 pm
обмен электронных валют онлайн
Leonelkic · August 8, 2023 at 4:47 pm
покердом официальный сайт скачать на андроид бесплатно
http://alwadifa-maroc.info/vb/member.php?u=246621&tab=activitystream
У нас реализуются мечты. Вы можете стать обладателем крупного джекпота или испытать азарт в высоких ставках. PokerDom Casino — это место, где удача ждет каждого игрока, и где даже самые смелые мечты становятся реальностью.Наше казино — это не только увлекательные слоты, но и множество других азартных развлечений. У нас вы найдете популярные карточные игры, захватывающие рулетки, а также возможность сыграть в блэкджек против настоящих дилеров. Виртуальная реальность также не осталась без внимания — погрузитесь в мир VR-казино и ощутите настоящий азарт на расстоянии шага от реальности.
Jamesdup · August 8, 2023 at 4:51 pm
Discover the world of the [url=https://nicotine-pouches.store/en/buy-snus-nicotine-pouches/]cheapest nicotine pouches[/url] with our range of exotic blends!
Leonelkic · August 8, 2023 at 4:59 pm
pokerdom android скачать
http://en.kingdek.com/plus/guestbook.php?gotopagerank=&totalresult=34627&pageno=3371
Мы заботимся о наших игроках и предоставляем удобные инструменты для комфортной игры. Загрузив клиент PokerDom на ПК, вы получите доступ к эксклюзивным бонусам и акциям, которые придадут вашей игре дополнительную пикантность. Клиент работает безупречно, обеспечивая стабильность и надежность при каждом розыгрыше.Казино PokerDom – это место, где азарт сочетается с надежностью и высоким качеством игрового опыта. Команда PokerDom стремится предоставить игрокам максимальное удовольствие от игры, обеспечивая честность и надежность всех игровых процессов. Вы можете быть уверены, что ваша игра будет проходить в справедливых условиях, гарантированных лицензией PokerDom Casino.
Marianep · August 8, 2023 at 5:06 pm
Благодаря 3d печать sla , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
RonaldXUdut · August 8, 2023 at 5:21 pm
обзор интернет казино
интернет казино на деньги
Так что если вы готовы попробовать свою удачу и испытать азарт на себе, онлайн казино 2023 года ждут вас с распростертыми объятиями. Выберите лучшее online casino на реальные деньги, внимательно ознакомьтесь с бонусами и правилами, и отправляйтесь в увлекательное путешествие по миру азарта и возможностей.Революция в Мире Онлайн Гемблинга
selling auto loan portfolio · August 8, 2023 at 5:24 pm
Stunning quest there. What occurred after? Take care!
Порнуха · August 8, 2023 at 5:34 pm
Порнуха
Edwardvulge · August 8, 2023 at 5:42 pm
pokerdom вход
https://int.5bb.ru/viewtopic.php?id=10436
Скачать клиент на ПК — это, как взять билет в мир азартных развлечений. PokerDom Casino предлагает вам не просто игры, а настоящее приключение, в котором вы становитесь главным героем. Лицензионные автоматы на нашем сайте — это как ворота в мир неисповеданных возможностей и невероятных выигрышей.Скачайте клиент на ПК и отправьтесь в путешествие по увлекательному миру PokerDom Casino, где каждый вращающийся барабан — это шанс изменить свою судьбу. Покердом Казино дарит вам ключи к вратам азартного рая, где вы становитесь главным героем своей собственной азартной истории.
Robertpearl · August 8, 2023 at 5:45 pm
https://seo.analizsaita.online/domain/nordic-spirit.gay
DonaldGeala · August 8, 2023 at 5:47 pm
обмен электронных валют вебмани
LindsayWet · August 8, 2023 at 6:01 pm
Jerrygeate · August 8, 2023 at 6:03 pm
https://internet82693.blogpostie.com/42028918/alojamiento-antofagasta-centro-opciones
Angelvor · August 8, 2023 at 7:04 pm
Best Digital Marketing Agency in Lagos
Content Krush Is a Digital Marketing Consulting Firm in Lagos, Nigeria with Focus on Search Engine Optimization, Growth Marketing, B2B Lead Generation, and Content Marketing.
DonaldGeala · August 8, 2023 at 7:07 pm
электронный обмен валют
Edwardvulge · August 8, 2023 at 7:23 pm
покердом вход
http://kladoiskatel.asia/memberlist.php?mode=viewprofile&u=5035
Скачать клиент на ПК — это, как получить ключ от двери в мир бесконечных азартных приключений. PokerDom Casino предоставляет вам этот ключ, который откроет перед вами мир выигрышей, волнения и невероятных эмоций. Каждый спин барабанов на наших лицензионных автоматах — это шанс почувствовать адреналин победы.Скачайте клиент на ПК и отправьтесь в путешествие по увлекательному миру PokerDom Casino, где каждый вращающийся барабан — это шанс изменить свою судьбу. Покердом Казино дарит вам ключи к вратам азартного рая, где вы становитесь главным героем своей собственной азартной истории.
esim_rhymn · August 8, 2023 at 7:41 pm
Защита данных в esim
RonaldXUdut · August 8, 2023 at 7:41 pm
казино список
казино
“Online Casino на Реальные Деньги”: Где Азарт Воплощается в БогатствоСделать ставку, нажать на кнопку, и ваши ладони сжимаются в предвкушении азарта – это и есть “Online Casino на Реальные Деньги”. Здесь каждый вращающийся барабан может изменить вашу жизнь, превратив маленькую ставку в крупный выигрыш. Это место, где каждый спин – это шанс, а каждая карта – билет в мир увлекательных возможностей.
Josepharomy · August 8, 2023 at 7:50 pm
pokerdom mobile скачать
https://reactos.org/forum/memberlist.php?mode=viewprofile&u=88599
Покердом Казино предлагает разнообразие игр, включая классические слоты, рулетку, блэкджек и многое другое. Безусловно, PokerDom Casino предлагает не только захватывающий геймплей, но и реальные возможности для выигрышей. Слоты на реальные деньги предоставляют игрокам уникальную возможность выиграть крупные суммы денег и получить незабываемые эмоции от игры.Игра в онлайн-казино стала настолько популярной в наше время, что множество игровых платформ предлагают свои услуги игрокам со всего мира. Однако, если вы ищете надежное и захватывающее казино, PokerDom Casino – это ваш лучший выбор. PokerDom Casino – это официальный сайт, который предлагает уникальный опыт игры в казино и возможность играть онлайн в слоты на реальные деньги.
Marianep · August 8, 2023 at 8:03 pm
Благодаря 3d печать из силикона , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Kristine · August 8, 2023 at 8:07 pm
Новинки русских сериалов на сайте “Россерия”
Все больше и больше людей во всем мире обратили свое внимание на новые русские сериалы. Они привлекают зрителей своей оригинальностью, захватывающими сюжетами и талантливыми актерами. Если вы хотите насладиться самыми свежими выпусками сериалов высокого качества, сайт “Россерия” – то, что вам нужно!
“Россерия” является популярным российским онлайн-платформой для сериалов. Этот веб-ресурс предлагает огромный каталог русскоязычных сериалов, которые пользуются огромным успехом у зрителей. На сайте вы найдете самые разнообразные жанры – от романтики и драмы до криминальных историй и научной фантастики. “Россерия” предлагает широкий спектр сериалов, чтобы удовлетворить вкус каждого зрителя.
Основным преимуществом сайта “Россерия” является его стабильность и качество видеопотока. Независимо от вашего местоположения, вы можете наслаждаться отличным качеством картинки и звука. Возможность просмотра сериалов в режиме онлайн или загрузки на устройство позволяет вам выбирать, когда и где вы хотите смотреть свои любимые сериалы.
Но что делает сайт “Россерия” действительно привлекательным, так это его постоянное обновление новыми русскими сериалами. Вы всегда будете в курсе последних телевизионных шедевров и сможете стать одним из первых зрителей, кто оценит их качество. Новые сериалы регулярно добавляются на сайт, поэтому вы никогда не останетесь без интересных и увлекательных историй.
Регистрация на сайте “Россерия” является простой и быстрой процедурой. Просто заполните несколько обязательных полей, и вы получите доступ к миру увлекательных сериалов. Благодаря своей пользовательской дружественности и удобной навигации, вы быстро найдете свои любимые сериалы или откроете для себя что-то новое.
Не упустите возможность погрузиться в удивительный мир русских сериалов. Посетите сайт “Россерия” прямо сейчас и начните наслаждаться самыми горячими новинками. Этот веб-ресурс сделает вашу аудиторскую жизнь еще более интересной и насыщенной. Получите максимум удовольствия от просмотра качественных русскоязычных сериалов на сайте “Россерия”!
My page :: https://rosseriya.ru/822-kstati-1-sezon.html
Robertpearl · August 8, 2023 at 8:26 pm
https://app.contentdominance.com/domain/nicotine-pouches.live
Deborahexozy · August 8, 2023 at 8:52 pm
Edwardvulge · August 8, 2023 at 9:02 pm
pokerdom вход
http://gorodkanash.ru/user/oezyynb/
Скачайте клиент на ПК и отправьтесь в путешествие по увлекательному миру PokerDom Casino, где каждый вращающийся барабан — это шанс изменить свою судьбу. Покердом Казино дарит вам ключи к вратам азартного рая, где вы становитесь главным героем своей собственной азартной истории.Скачать клиент на ПК — это, как взять билет в мир азартных развлечений. PokerDom Casino предлагает вам не просто игры, а настоящее приключение, в котором вы становитесь главным героем. Лицензионные автоматы на нашем сайте — это как ворота в мир неисповеданных возможностей и невероятных выигрышей.
Josepharomy · August 8, 2023 at 9:33 pm
скачать pokerdom приложение на андроид
https://xakeram.ru/user/12518/
PokerDom Casino является лицензированным и регулируемым казино, что гарантирует безопасность и честность игры. Команда PokerDom Casino строго следит за соблюдением всех стандартов и предоставляет игрокам честные и справедливые игры. Они также обеспечивают безопасность ваших финансовых транзакций и конфиденциальность ваших личных данных, чтобы вы могли полностью насладиться игрой, не беспокоясь о своей безопасности.Игра в онлайн-казино стала настолько популярной в наше время, что множество игровых платформ предлагают свои услуги игрокам со всего мира. Однако, если вы ищете надежное и захватывающее казино, PokerDom Casino – это ваш лучший выбор. PokerDom Casino – это официальный сайт, который предлагает уникальный опыт игры в казино и возможность играть онлайн в слоты на реальные деньги.
RonaldXUdut · August 8, 2023 at 9:56 pm
проверенные казино
casino online
Топ казино онлайн предлагают вам уникальную возможность окунуться в азартный мир и испытать настоящее волнение от игры на реальные деньги. Один щелчок мыши, и вы попадаете в увлекательное путешествие, где каждый раунд становится шансом на победу. Online casino на реальные деньги – это не только возможность выиграть крупные суммы, но и способ провести время с удовольствием, вкусив азарт и напряжение ожидания.Сделать ставку, нажать на кнопку, и ваши ладони сжимаются в предвкушении азарта – это и есть “Online Casino на Реальные Деньги”. Здесь каждый вращающийся барабан может изменить вашу жизнь, превратив маленькую ставку в крупный выигрыш. Это место, где каждый спин – это шанс, а каждая карта – билет в мир увлекательных возможностей.
JosephApego · August 8, 2023 at 9:59 pm
https://kwork.ru/links/1017228/progon-khrumerom
RonaldXUdut · August 8, 2023 at 10:12 pm
лучшее казино онлайн
https://stopshies.ru
Онлайн казино на реальные деньги предлагают множество уникальных бонусов, которые позволяют увеличить ваш стартовый капитал. Бесплатные вращения, бонусы на депозит, программы лояльности – всё это доступно для вас, чтобы сделать вашу игру ещё более прибыльной и захватывающей. Такие акции делают игру на реальные деньги в онлайн казино особенно выгодной и интересной.Топ казино онлайн предлагают вам уникальную возможность окунуться в азартный мир и испытать настоящее волнение от игры на реальные деньги. Один щелчок мыши, и вы попадаете в увлекательное путешествие, где каждый раунд становится шансом на победу. Online casino на реальные деньги – это не только возможность выиграть крупные суммы, но и способ провести время с удовольствием, вкусив азарт и напряжение ожидания.
Edwardvulge · August 8, 2023 at 10:34 pm
pokerdom официальный сайт скачать
http://www.detki-v-setke.ru/index.php?showuser=18454
Покердом Казино — это целый мир, где каждый игрок может найти свой путь к успеху. Наш официальный сайт PokerDom Casino — это как волшебное зелье, дарящее вам магическую силу азарта. Здесь вы найдете лицензионные автоматы от лучших разработчиков, каждый из которых готов погрузить вас в уникальный мир развлечений.Не упустите возможность стать частью PokerDom Casino — уникального мира азарта и выигрышей. Скачайте клиент на ПК и погрузитесь в водоворот увлекательных эмоций и ярких впечатлений. Здесь каждый найдет что-то свое, ведь наш официальный сайт создан для того, чтобы сделать ваш опыт игры незабываемым и невероятным.
GroverMople · August 8, 2023 at 10:35 pm
539開獎
今彩539:您的全方位彩票投注平台
今彩539是一個專業的彩票投注平台,提供539開獎直播、玩法攻略、賠率計算以及開獎號碼查詢等服務。我們的目標是為彩票愛好者提供一個安全、便捷的線上投注環境。
539開獎直播與號碼查詢
在今彩539,我們提供即時的539開獎直播,讓您不錯過任何一次開獎的機會。此外,我們還提供開獎號碼查詢功能,讓您隨時追蹤最新的開獎結果,掌握彩票的動態。
539玩法攻略與賠率計算
對於新手彩民,我們提供詳盡的539玩法攻略,讓您快速瞭解如何進行投注。同時,我們的賠率計算工具,可幫助您精準計算可能的獎金,讓您的投注更具策略性。
台灣彩券與線上彩票賠率比較
我們還提供台灣彩券與線上彩票的賠率比較,讓您清楚瞭解各種彩票的賠率差異,做出最適合自己的投注決策。
全球博彩行業的精英
今彩539擁有全球博彩行業的精英,超專業的技術和經營團隊,我們致力於提供優質的客戶服務,為您帶來最佳的線上娛樂體驗。
539彩票是台灣非常受歡迎的一種博彩遊戲,其名稱”539″來自於它的遊戲規則。這個遊戲的玩法簡單易懂,並且擁有相對較高的中獎機會,因此深受彩民喜愛。
遊戲規則:
539彩票的遊戲號碼範圍為1至39,總共有39個號碼。
玩家需要從1至39中選擇5個號碼進行投注。
每期開獎時,彩票會隨機開出5個號碼作為中獎號碼。
中獎規則:
若玩家投注的5個號碼與當期開獎的5個號碼完全相符,則中得頭獎,通常是豐厚的獎金。
若玩家投注的4個號碼與開獎的4個號碼相符,則中得二獎。
若玩家投注的3個號碼與開獎的3個號碼相符,則中得三獎。
若玩家投注的2個號碼與開獎的2個號碼相符,則中得四獎。
若玩家投注的1個號碼與開獎的1個號碼相符,則中得五獎。
優勢:
539彩票的中獎機會相對較高,尤其是對於中小獎項。
投注簡單方便,玩家只需選擇5個號碼,就能參與抽獎。
獎金多樣,不僅有頭獎,還有多個中獎級別,增加了中獎機會。
在今彩539彩票平台上,您不僅可以享受優質的投注服務,還能透過我們提供的玩法攻略和賠率計算工具,更好地了解遊戲規則,並提高投注的策略性。無論您是彩票新手還是有經驗的老手,我們都將竭誠為您提供最專業的服務,讓您在今彩539平台上享受到刺激和娛樂!立即加入我們,開始您的彩票投注之旅吧!
Edwardvulge · August 8, 2023 at 10:46 pm
казино покердом
http://terios2.ru/forums/index.php?autocom=gallery&req=si&img=1812
Скачать клиент на ПК — это, как взять билет в мир азартных развлечений. PokerDom Casino предлагает вам не просто игры, а настоящее приключение, в котором вы становитесь главным героем. Лицензионные автоматы на нашем сайте — это как ворота в мир неисповеданных возможностей и невероятных выигрышей.Покердом Казино — это исключительное сочетание качества, надежности и разнообразия. Наш официальный сайт PokerDom Casino создан для того, чтобы удовлетворить самые изысканные запросы азартных любителей. Здесь вас ожидает огромный выбор лицензионных автоматов от лучших разработчиков. Играя в нашем казино, вы становитесь частью впечатляющего азартного пазла, где каждая деталь важна.
Marianep · August 8, 2023 at 10:49 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать макетов для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Robertpearl · August 8, 2023 at 11:11 pm
https://www.seoanalyzercheck.com/domain/blck1.fun
Josepharomy · August 8, 2023 at 11:15 pm
pokerdom скачать на андроид на реальные
https://smotra.ru/users/udypaqa12/
Покердом Казино предлагает разнообразие игр, включая классические слоты, рулетку, блэкджек и многое другое. Безусловно, PokerDom Casino предлагает не только захватывающий геймплей, но и реальные возможности для выигрышей. Слоты на реальные деньги предоставляют игрокам уникальную возможность выиграть крупные суммы денег и получить незабываемые эмоции от игры.Один из ключевых аспектов PokerDom Casino – его клиент на ПК, который позволяет наслаждаться игрой в казино в удобное время. Скачав и установив клиент на свой компьютер, вы получаете доступ к широкому выбору лицензионных автоматов, созданных ведущими разработчиками игр. Это дает вам возможность насладиться захватывающей атмосферой игры и повысить свои шансы на победу.
Ericaprift · August 8, 2023 at 11:41 pm
JosephApego · August 9, 2023 at 12:34 am
прогон по профилям
Josepharomy · August 9, 2023 at 12:47 am
онлайн казино покердом
https://bike.by/forum/viewtopic.php?p=29743
Казино PokerDom Casino привлекает внимание игроков своей превосходной графикой, захватывающими анимациями и уникальным игровым опытом. Играя в PokerDom Casino, вы можете ощутить адреналин и волнение, которое дает возможность выиграть крупный джекпот.PokerDom Casino является лицензированным и регулируемым казино, что гарантирует безопасность и честность игры. Команда PokerDom Casino строго следит за соблюдением всех стандартов и предоставляет игрокам честные и справедливые игры. Они также обеспечивают безопасность ваших финансовых транзакций и конфиденциальность ваших личных данных, чтобы вы могли полностью насладиться игрой, не беспокоясь о своей безопасности.
Josepharomy · August 9, 2023 at 1:00 am
скачать покердом на android
https://kolerasa12.livejournal.com/profile
Казино PokerDom Casino привлекает внимание игроков своей превосходной графикой, захватывающими анимациями и уникальным игровым опытом. Играя в PokerDom Casino, вы можете ощутить адреналин и волнение, которое дает возможность выиграть крупный джекпот.Покердом Казино предлагает разнообразие игр, включая классические слоты, рулетку, блэкджек и многое другое. Безусловно, PokerDom Casino предлагает не только захватывающий геймплей, но и реальные возможности для выигрышей. Слоты на реальные деньги предоставляют игрокам уникальную возможность выиграть крупные суммы денег и получить незабываемые эмоции от игры.
JosephApego · August 9, 2023 at 1:12 am
прогон по форумам
Marianep · August 9, 2023 at 1:35 am
Благодаря 3d печать стоматология , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JosephApego · August 9, 2023 at 1:37 am
прогон хрумер
ChaseCaw · August 9, 2023 at 1:47 am
pokerdom вход
http://www.med52.ru/blog/21617.html
Лицензионные автоматы PokerDom Casino — это подлинная сокровищница уникальных миров. Здесь вы найдете слоты на любой вкус и настроение: от захватывающих приключений в далеких космических просторах до увлекательных историй о приключениях на диком Западе. Покердом Казино гордится своим разнообразием и стремлением предоставить каждому игроку неповторимый опыт.Играть в слоты на реальные деньги на PokerDom Casino — это как взять судьбу в свои руки и сделать шаг к богатству. Вас ждет множество азартных сюрпризов на официальном сайте Покердом Казино. Наши лицензионные автоматы — это настоящая сокровищница, где каждый спин может принести вам драгоценные выигрыши.
Robertpearl · August 9, 2023 at 1:57 am
https://seo.analizsaita.online/domain/white-fox.pro
Keithelogy · August 9, 2023 at 2:22 am
pokerdom скачать клиент на андроид
http://www.bryners.ru/forum/memberlist.php?sk=d&sd=a&start=21350
Что касается скачивания клиента на ПК, PokerDom Casino предлагает удобный и быстрый процесс. Вам просто нужно перейти на наш официальный сайт, следовать простым инструкциям и наслаждаться игровым процессом в любое время. Мы ценим ваше время и стремимся обеспечить максимальное удобство во всех аспектах нашего онлайн-казино.Покердом Казино гордится своей репутацией надежного и ведущего оператора в сфере онлайн-азарта.
Lorenzodut · August 9, 2023 at 3:21 am
лучшие онлайн казино россии
https://domrukabinet.ru
Онлайн Казино 2023: Новые Горизонты Азартных ПутешествийПогрузись в Мир “Топ Казино Онлайн”
ChaseCaw · August 9, 2023 at 3:28 am
pokerdom casino
https://sfx.thelazy.net/forum/games/2453/
Приветствуем вас в мире азарта и волнения на официальном сайте PokerDom Casino! Здесь ваша мечта о крупном выигрыше может стать реальностью. Покердом Казино предоставляет вам уникальную возможность скачать приложение на ПК и погрузиться в безграничные азартные приключения.Добро пожаловать в удивительный мир азарта и возможностей, который открывается перед вами на официальном сайте PokerDom Casino! Здесь вы сможете полностью погрузиться в мир игры в слоты на реальные деньги, наслаждаясь каждым вращением барабанов и ощущая невероятное напряжение перед каждой ставкой. Покердом Казино готов предоставить вам бесконечные возможности для выигрышей и невероятных эмоций.
JosephApego · August 9, 2023 at 3:56 am
Качественный прогон Хрумером
Jerrygeate · August 9, 2023 at 3:59 am
http://eng.idongin.kr/bbs/board.php?bo_table=free&wr_id=50687
Keithelogy · August 9, 2023 at 4:08 am
скачать покердом на андроид на реальные
https://gti-club.ru/forum/showthread.php?t=58670&p=555560
Покердом Казино гарантирует, что все игры предоставлены в соответствии с высокими стандартами качества и честности. Лицензионные автоматы, доступные на нашем официальном сайте, разработаны ведущими провайдерами игрового софта, что гарантирует безопасность и непревзойденное качество игрового процесса.Покердом Казино гордится своей репутацией надежного и ведущего оператора в сфере онлайн-азарта.
JosephApego · August 9, 2023 at 4:12 am
Прогон хрумером сайта
Marianep · August 9, 2023 at 4:17 am
Благодаря 3d печать по металлу , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Robertpearl · August 9, 2023 at 4:41 am
https://audit.promedia66.co.uk/domain/nicotine-pouches.live
ChaseCaw · August 9, 2023 at 5:00 am
покердом официальный сайт
https://www.redbubble.com/people/yduoo/shop?anchor=profile&asc=u
Играть в слоты на реальные деньги на PokerDom Casino — это как взять судьбу в свои руки и сделать шаг к богатству. Вас ждет множество азартных сюрпризов на официальном сайте Покердом Казино. Наши лицензионные автоматы — это настоящая сокровищница, где каждый спин может принести вам драгоценные выигрыши.Добро пожаловать в удивительный мир азарта и возможностей, который открывается перед вами на официальном сайте PokerDom Casino! Здесь вы сможете полностью погрузиться в мир игры в слоты на реальные деньги, наслаждаясь каждым вращением барабанов и ощущая невероятное напряжение перед каждой ставкой. Покердом Казино готов предоставить вам бесконечные возможности для выигрышей и невероятных эмоций.
zapoy_Nuh · August 9, 2023 at 5:03 am
вывод из запоя на дому подольск цены https://vivod-zapoya-podolsk.ru/
ChaseCaw · August 9, 2023 at 5:12 am
покердом вход
https://hyipinvest.club/threads/104550/
Лицензионные автоматы PokerDom Casino — это подлинная сокровищница уникальных миров. Здесь вы найдете слоты на любой вкус и настроение: от захватывающих приключений в далеких космических просторах до увлекательных историй о приключениях на диком Западе. Покердом Казино гордится своим разнообразием и стремлением предоставить каждому игроку неповторимый опыт.Покердом Казино ? это место, где виртуальные барабаны превращаются в магические кружки, открывающие дорогу к виртуозному владению азартом. На нашем официальном сайте PokerDom Casino вы обретете способность проникнуть в тайны азартных искусств и создать свою неповторимую симфонию победы.
Lorenzodut · August 9, 2023 at 5:47 am
игры казино на реальные деньги
casino
Топ казино онлайн предлагают вам уникальную возможность окунуться в азартный мир и испытать настоящее волнение от игры на реальные деньги. Один щелчок мыши, и вы попадаете в увлекательное путешествие, где каждый раунд становится шансом на победу. Online casino на реальные деньги – это не только возможность выиграть крупные суммы, но и способ провести время с удовольствием, вкусив азарт и напряжение ожидания.Мечтаете о сорвать куш, играя в “Online Casino на Реальные Деньги”? Это возможно в мире онлайн гемблинга, где каждый спин может принести вам настоящее богатство. Здесь удача – ваш лучший друг, а азарт – путь к большим деньгам. Выберите свое казино, сделайте ставку, и дайте себе шанс на финансовую независимость.
Keithelogy · August 9, 2023 at 5:51 am
скачать pokerdom приложение на андроид
http://kvitka.ukrbb.net/viewtopic.php?f=58&t=11195&p=27298
Покердом Казино гордится своей репутацией надежного и ведущего оператора в сфере онлайн-азарта.Что касается скачивания клиента на ПК, PokerDom Casino предлагает удобный и быстрый процесс. Вам просто нужно перейти на наш официальный сайт, следовать простым инструкциям и наслаждаться игровым процессом в любое время. Мы ценим ваше время и стремимся обеспечить максимальное удобство во всех аспектах нашего онлайн-казино.
JosephApego · August 9, 2023 at 5:53 am
Заказать прогон сайта
PatrickPsype · August 9, 2023 at 6:32 am
pokerdom вход
https://foodretail.ru/people/view?user=167600
Когда вы впервые войдете на официальный сайт PokerDom, вас окутает атмосфера настоящего казино, где время словно останавливается, а азарт наполняет воздух и пробуждает чувства. Вас окружат яркие баннеры с приветственными предложениями, и несколько кликов мыши отделят вас от мира увлекательных приключений.На Покердоме Казино представлены самые разнообразные и лицензионные автоматы, которые поражают своим разнообразием и качеством. Здесь каждый аппарат – настоящее произведение искусства, созданное изысканными дизайнерами и талантливыми разработчиками. Вам предстоит испытать на себе магию вращающихся барабанов и, возможно, разгадать тайны скрытых выигрышей.
vk8.at · August 9, 2023 at 6:35 am
Hello There. I found your blog using msn. This is an extremely well
written article. I will make sure to bookmark it and come back to read
more of your useful information. Thanks for the post.
I will definitely return.
Marianep · August 9, 2023 at 7:03 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать металл для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Keithelogy · August 9, 2023 at 7:22 am
покердом скачать apk
https://pcmore.ru/phpBB/viewtopic.php?p=28341
Пришло время окунуться в захватывающий мир азартных игр с PokerDom Casino! Если вы ищете официальный сайт, где можно скачать и играть онлайн в слоты на реальные деньги, ваш поиск заканчивается здесь. PokerDom Casino – это ваш надежный партнер в мире азарта и удачи.Покердом Казино является надежным и проверенным оператором азартных игр, который предлагает абсолютно честную и безопасную игру. Наше казино оснащено передовыми системами безопасности, чтобы защитить ваши финансовые транзакции и личные данные. Мы ценим доверие наших игроков и стремимся обеспечить им самый надежный игровой опыт.
Angelvor · August 9, 2023 at 7:27 am
nhà cái uy tín
Keithelogy · August 9, 2023 at 7:34 am
покердом скачать на андроид бесплатно с официального
https://xakeram.ru/user/12526/
Покердом Казино предлагает вам беспрецедентные возможности испытать азарт и ощутить адреналин, играя в лицензионные автоматы. Наш клиент на ПК предлагает широкий выбор игр, которые не оставят вас равнодушными. Независимо от вашего предпочтения – классические слоты, видео-слоты или прогрессивные джекпоты, PokerDom Casino имеет все, что вам нужно для захватывающего игрового опыта.Покердом Казино является надежным и проверенным оператором азартных игр, который предлагает абсолютно честную и безопасную игру. Наше казино оснащено передовыми системами безопасности, чтобы защитить ваши финансовые транзакции и личные данные. Мы ценим доверие наших игроков и стремимся обеспечить им самый надежный игровой опыт.
JosephApego · August 9, 2023 at 7:45 am
прогон по комментариям
Angelvor · August 9, 2023 at 7:53 am
kantorbola
Situs Judi Slot Online Terpercaya dengan Permainan Dijamin Gacor dan Promo Seru”
Kantorbola merupakan situs judi slot online yang menawarkan berbagai macam permainan slot gacor dari provider papan atas seperti IDN Slot, Pragmatic, PG Soft, Habanero, Microgaming, dan Game Play. Dengan minimal deposit 10.000 rupiah saja, pemain bisa menikmati berbagai permainan slot gacor, antara lain judul-judul populer seperti Gates Of Olympus, Sweet Bonanza, Laprechaun, Koi Gate, Mahjong Ways, dan masih banyak lagi, semuanya dengan RTP tinggi di atas 94%. Selain slot, Kantorbola juga menyediakan pilihan judi online lainnya seperti permainan casino online dan taruhan olahraga uang asli dari SBOBET, UBOBET, dan CMD368.
pijat panggilan surabaya · August 9, 2023 at 7:57 am
First of all I want to say great blog! I had a quick question in which I’d like to ask if you don’t mind.
I was curious to know how you center yourself and clear your thoughts before writing.
I’ve had a tough time clearing my mind in getting my ideas out there.
I do enjoy writing however it just seems like the first
10 to 15 minutes are usually lost simply just trying
to figure out how to begin. Any recommendations or hints?
Thanks!
Lorenzodut · August 9, 2023 at 8:05 am
казино онлайн список
casino online
Так что если вы готовы попробовать свою удачу и испытать азарт на себе, онлайн казино 2023 года ждут вас с распростертыми объятиями. Выберите лучшее online casino на реальные деньги, внимательно ознакомьтесь с бонусами и правилами, и отправляйтесь в увлекательное путешествие по миру азарта и возможностей.Добро пожаловать в захватывающий мир онлайн казино 2023 года, где каждая ставка может изменить вашу судьбу! Онлайн казино стали настоящей сенсацией, предоставляя уникальную возможность играть в любимые азартные игры прямо из уютного уголка вашего дома или в пути. Онлайн казино – это виртуальная площадка, на которой сходятся азарт и развлечения, где каждый спин колеса рулетки или нажатие на кнопку слота может принести вам не только деньги, но и незабываемые эмоции.
PatrickPsype · August 9, 2023 at 8:19 am
скачать покердом на пк
https://denkrold.gumroad.com/
Не стоит упускать шанс испытать азарт и ощутить дыхание победы! PokerDom Casino дарит невероятные эмоции и уникальный игровой опыт, который оставит след в вашем сердце надолго. Не упустите свой шанс сорвать крупный куш, играя на официальном сайте PokerDom Casino. Скачайте клиент на ПК прямо сейчас и погрузитесь в мир азартных развлечений! Покердом Казино ждет вас!Покердом Казино – это не только игры на удачу, но и место, где мастерство игроков приходит на первое место. Здесь можно сразиться с достойными противниками в увлекательных карточных турнирах. Любители турниров найдут здесь множество интересных событий с разнообразными призовыми фондами и условиями участия.
bike shorts for women · August 9, 2023 at 8:46 am
Wow! At last I got a website from where I be capable of actually obtain valuable data concerning my study and knowledge.
anyaksauts · August 9, 2023 at 8:55 am
На сайте https://play.google.com/store/apps/details?id=com.goalgetter2323 вы сможете сделать ставки в популярной БК «Леон», которая осуществляет свою деятельность с 2011 года и в соответствии с лицензией, которая выдана в том же году. Любая финансовая операция происходит через ЦУПИС. На сегодняшний момент компания входит в топ лидеров своей сферы. Она предлагает лучшие условия для ставок, а также высокие коэффициенты. Не менее важный момент – это отзывчивая служба поддержки, которая моментально решает вопрос.
Ramonita · August 9, 2023 at 9:01 am
Great advice, Regards.
Feel free to visit my site: Internet Profit Generation (https://cashcascade.net/login)
FrankZen · August 9, 2023 at 9:02 am
скачать pokerdom приложение на андроид
https://www.feroza.ru/forum/viewtopic.php?f=17&t=21924
Играть на официальном сайте PokerDom Casino – это как взлететь на крыльях удачи и забыть о реальности. Это путешествие, где каждый уголок пронизан азартом и возможностями. Скачайте клиент на ПК и станьте частью этого захватывающего путешествия, где вы – главный герой, а каждый спин – следующая глава в вашей истории побед.Добро пожаловать в захватывающий мир азарта и волнения на официальном сайте PokerDom Casino! Это не просто казино, это место, где ваши мечты о крупном выигрыше превращаются в реальность. Покердом Казино приглашает вас скачать приложение на ПК и насладиться множеством лицензионных автоматов, каждый из которых — это как отдельный мир невероятных возможностей.
Erma · August 9, 2023 at 10:32 am
Heya i am ffor thee fifst time here. I found this board aand I
find It really useful & it helped mme out much. I hope to give something back and
aiid others like you aided me.
My blog; Recommended site (Erma)
FRUXUY3 · August 9, 2023 at 12:08 pm
If you would like to obtain much from this paragraph then you
have to apply such strategies to your won weblog.
JessieOrgam · August 9, 2023 at 12:11 pm
foods that lower cholesterol
Explore a delectable world of foods that lower cholesterol and take charge of your cardiovascular health. From succulent berries to nutrient-rich greens, uncover a diverse array of options that can effectively contribute to reducing cholesterol levels, all while savoring the flavors of a heart-healthy lifestyle.
Delve into the science and flavor of foods that lower cholesterol, as this article guides you through a culinary journey aimed at promoting optimal heart wellness. Learn how incorporating these cholesterol-conscious choices, such as fiber-packed vegetables and antioxidant-rich fruits, can have a positive impact on managing cholesterol levels and overall cardiovascular health.
FrankZen · August 9, 2023 at 12:26 pm
pokerdom apk скачать
http://cs-online.ru/forum/index.php?showtopic=13762
Какой путь вы выберете: покорить слоты на реальные деньги онлайн или скачать клиент на ПК для наибольшего удобства? Вне зависимости от вашего выбора, PokerDom Casino гарантирует вам азартное веселье и захватывающие моменты, которые запомнятся на долгое время.PokerDom Casino – ваш проводник в мир азартных эмоций. Покердом Казино готов предоставить вам билет в мир увлекательных приключений, где каждая ставка – это шанс, а каждый джекпот – звезда, сверкающая на вашем азартном небосклоне.
ScottNix · August 9, 2023 at 12:55 pm
https://dumbtwinks.com/index.php/User:JeanettBartels7
Jerrygeate · August 9, 2023 at 2:23 pm
http://int79.co.kr/g5/bbs/board.php?bo_table=wen1qthgao&wr_id=72633
ErnestNem · August 9, 2023 at 2:46 pm
покердом игры
https://ticew.federatedjournals.com/sait-kazino-pokierdom/
Покердом Казино — это место, где каждый игрок может ощутить азартное дыхание. Играть онлайн в слоты на реальные деньги на PokerDom Casino — это как открыть дверь в мир азартных возможностей, где каждая ставка — это как шепот азартного успеха.Покердом Казино — это место, где каждый игрок может ощутить себя настоящим азартным героем. Играть на официальном сайте PokerDom Casino — это как открыть дверь в мир азартных возможностей, где каждая ставка — это шанс на азартную победу.
Jamiekar · August 9, 2023 at 2:46 pm
https://gratisafhalen.be/author/sherlynnnf/
cialis pills · August 9, 2023 at 2:55 pm
canadian pharmacy 2023 buy online prescription drugs Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
LonnieBug · August 9, 2023 at 2:56 pm
Всё о казино покердом
https://maps.google.kg/url?q=https://playpokerdom.blogspot.com
AnthonyGiche · August 9, 2023 at 3:29 pm
покердом
https://runet-id.com/2675612/
Когда речь заходит о PokerDom Casino, мы говорим о вратарях в мир азарта, о надежных проводниках сквозь лабиринт соблазнов. Здесь, на официальном сайте Покердом Казино, вы откроете дверь в удивительное путешествие, где азарт и выигрыш ждут вас на каждом углу.Играть онлайн в слоты на реальные деньги на PokerDom Casino – это как дуэль с судьбой, где каждая ставка – это ваш ход. Виртуальные слоты – это не просто набор символов, это визуальное шоу, где вы – режиссер, а символы – актеры, создающие невероятный сюжет. Все это делает Покердом Казино неповторимым миром азартных эмоций и великолепных выигрышей.
Marianep · August 9, 2023 at 3:34 pm
Благодаря 3d принтер печать резиной , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JosephdutLL · August 9, 2023 at 3:43 pm
казино список
https://candy-shock.ru
Так что если вы готовы попробовать свою удачу и испытать азарт на себе, онлайн казино 2023 года ждут вас с распростертыми объятиями. Выберите лучшее online casino на реальные деньги, внимательно ознакомьтесь с бонусами и правилами, и отправляйтесь в увлекательное путешествие по миру азарта и возможностей.Выбирая онлайн казино, обращайте внимание на топовые платформы. Играть на реальные деньги стоит только в проверенных местах. Эти казино сочетают в себе надежность и богатство игровых вариантов. Вам предстоит погрузиться в мир ярких слотов, захватывающих рулеток и других азартных игр, где удача и стратегия ведут к победам. Так что не упустите свой шанс – ведь топ казино онлайн всегда готовы принять вас в свои ряды!
simigvax · August 9, 2023 at 3:49 pm
На сайте https://intim24.org вы сможете подобрать роскошную, привлекательную и кокетливую девушку для проведения незабываемого досуга. Девушки предлагают незабываемую ночь любви. Вы сможете провести с дамой час или больше. Ваши отношения будут незабываемыми, а самое главное, что на некоторое время вы позабудете с такими девушками о неприятностях. Только для вас самые развратные танцы и нежные прикосновения, которые понравятся каждому мужчине. И самое главное, что вы сможете воспользоваться услугой в любое время.
TIDennisdutLL · August 9, 2023 at 4:23 pm
Canlэ Kurpiyer Oyunlarэ
Canl? Casino
Canlэ Casino 2022, sadece oyunlarэ deрil, aynэ zamanda saрladэрэ benzersiz deneyimiyle de цne зэkэyor. Eрlence dolu sohbetler, krupiyelerle samimi iletiюim ve diрer oyuncularla rekabetin tadэnэ зэkarэrken, adeta bir kumarhane masasэnda oturmuю gibi hissedeceksiniz. Oyun sonuзlarэnэn rastgele oluюtuрu gьvenilir algoritmalar sayesinde adil bir oyun deneyimi yaюarken, heyecanэn doruklarэna ulaюacaksэnэz.Canlэ casino sitelerinin avantajlarэndan biri de, fiziksel bir kumarhanede bulunmanэn getirdiрi bazэ sэnэrlamalarэ ortadan kaldэrmasэdэr. Oyuncular, istedikleri zaman ve yerde oyunlara katэlabilirler. Bu da цzellikle yoрun iю temposuna sahip olanlar iзin bьyьk bir avantajdэr. Ayrэca, canlэ casino siteleri genellikle зeюitli bonuslar, promosyonlar ve sadakat programlarэ sunarak, oyuncularэn daha fazla kazanз elde etmelerine yardэmcэ olur.
ErnestNem · August 9, 2023 at 4:27 pm
скачать покердом на пк
https://www.pickupforum.ru/index.php?showuser=6261521
Скачать клиент на ПК PokerDom Casino — это как взять в руки свой азартный ключ и открыть дверь к победе. Здесь каждый спин барабанов — это как уникальный код к азартной славе.Скачать клиент на ПК — это как взять на себя роль азартного пионера и исследователя. Здесь каждый игрок — это как звезда на азартном небосклоне, сверкающая в ночи азартных возможностей.
AnthonyGiche · August 9, 2023 at 5:13 pm
покердом рабочее зеркало
https://hub.docker.com/u/qasto
Добро пожаловать в виртуальное казино уникальных возможностей — PokerDom Casino! Наш Покердом Казино — это не просто игровая площадка, это истинное царство азартных приключений, где каждый спин барабанов может стать ключом к казначейству реальных денег.Лицензионные автоматы на PokerDom Casino — это настоящие произведения искусства, где каждый символ превращается в каплю роскоши. Это не просто барабаны, это порталы в мир выигрышей, которые открываются в ответ на ваше дерзновение. Ведь когда вы выбираете PokerDom Casino, вы выбираете безопасность и надежность, гарантии честности и увлекательности.
ErnestNem · August 9, 2023 at 5:56 pm
покердом казино
https://www.peopleknit.ru/club/user/14381/
Скачать клиент на ПК — это как взять в руки свою азартную удачу и начать свой путь к крупному выигрышу. Здесь каждый клик — это как звук азартного ритма, который ведет вас к победе.Скачать клиент на ПК PokerDom Casino — это как взять в руки свой азартный микрофон и начать исполнять азартный гимн победы. Здесь каждая игра — это как нота в азартной симфонии, создающей мелодию вашего азартного успеха.
TIDennisdutLL · August 9, 2023 at 6:05 pm
Canlэ Casino 2022
https://www.tybkonya.com
Canlэ Casino Siteleri, gьvenilirlikleri ve зeюitli oyun seзenekleri ile dikkat зekiyor. Blackjack, Rulet, Bakara gibi klasik masa oyunlarэndan tutun da Dream Catcher, Monopoly Live gibi yenilikзi oyunlara kadar birзok seзenek sunulmaktadэr. Bu oyunlar, oyuncularэn stratejilerini denemesine, юanslarэnэ denemesine ve tabii ki kazanзlar elde etmelerine olanak tanэr. Casino oyunlarэ 2022 yэlэnda da daha da geliюerek, gцrsel ve iюitsel kalite aзэsэndan цnemli adэmlar atmэюtэr.Canlэ Casino deneyimi, heyecanэ ve gerзek bir kumarhane atmosferini evinize getiren eюsiz bir platform sunuyor. Canlэ Casino Siteleri, 2022 yэlэnda da oyun tutkunlarэna unutulmaz anlar yaюatmaya devam ediyor. Kumarhane dьnyasэnэn en gцzde oyunlarэ, gerзek krupiyeler eюliрinde, online ortamda sizleri bekliyor. Eрer юansэnэzэ denemek ve bьyьk цdьllere gцz kэrpmanэn vakti geldiрini dьюьnьyorsanэz, Canlэ Casino 2022’nin size sunduрu imkanlara bir gцz atmalэsэnэz.
ErnestNem · August 9, 2023 at 6:08 pm
клиент покердом
https://nc750.ru/member.php?u=2810
Скачать клиент на ПК — это как взять в руки свои азартные краски и начать свой путь к яркой азартной палитре. Здесь каждый клик — это как капля краски на азартном холсте, который скоро станет вашим шедевром азартной победы.Покердом Казино — это не только игра, это азартное путешествие, где каждая ставка — это шаг в неизведанный мир азартных возможностей. На официальном сайте PokerDom Casino вы найдете самые разнообразные лицензионные автоматы, которые дарят вам шанс испытать настоящий водопад эмоций.
Marianep · August 9, 2023 at 6:18 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать полиамидом для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
AnthonyGiche · August 9, 2023 at 6:55 pm
покердом играть
https://www.provenexpert.com/ario/
Лицензионные автоматы PokerDom Casino — это как фантастический мир, в котором каждый игрок становится героем своей собственной сказки. Здесь нет предела воображению, ведь наши автоматы способны перенести вас в самые невероятные миры. Играя на официальном сайте Покердом Казино, вы становитесь капитаном своей судьбы.Скачать клиент на ПК — это как взять путевой билет в волшебный поезд азартных возможностей. Вам больше не нужно ждать, пока звезды сойдутся на одной линии, чтобы почувствовать вкус настоящего азарта. С PokerDom Casino клиентом на ПК вы становитесь капитаном своего азартного корабля, рулите волнами страсти и судьбы.
cialis pills · August 9, 2023 at 7:14 pm
drug store online canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Jamesabiva · August 9, 2023 at 7:27 pm
покердом покер
http://web-lance.net/forums.php?m=posts&q=20838
Что делает PokerDom Casino настолько привлекательным? Это не только широкий выбор игр и удобный интерфейс, но и атмосфера уюта, которая создает ощущение, будто вы играете в самом сердце азартной столицы. Каждый раз, когда вы загружаете клиент на ПК или играете онлайн на официальном сайте, вы погружаетесь в атмосферу настоящего казино.Среди бескрайних просторов виртуального азарта маячит вам островок уникальных возможностей ? PokerDom Casino. Здесь, на официальном сайте Покердом Казино, вам предоставлена возможность не только испытать удачу, но и ощутить вкус истинных азартных эмоций. Откройте для себя мир волнения и приключений, скачав клиент на ПК, чтобы полностью погрузиться в мир лицензионных автоматов.
LonnieBug · August 9, 2023 at 7:33 pm
Всё о казино покердом
http://www.google.nr/url?q=https://playpokerdom.blogspot.com
Angelvor · August 9, 2023 at 7:39 pm
Unveiling the Beauty of Neural Network Art! Dive into a mesmerizing world where technology meets creativity. Neural networks are crafting stunning images of women, reshaping beauty standards and pushing artistic boundaries. Join us in exploring this captivating fusion of AI and aesthetics. #NeuralNetworkArt #DigitalBeauty
TIDennisdutLL · August 9, 2023 at 7:42 pm
Kazandэran Casino Oyunlarэ
https://www.tybkonya.com
Canlэ casino siteleri denildiрinde akla gelen ilk anahtar kelimeler “canlэ casino” ve “canlэ casino siteleri”dir. Bu kelimeler, oyuncularэn arama motorlarэnda en sэk kullandэрэ terimlerdir ve bu siteleri bulmada цnemli bir rol oynarlar. Bu siteler, kullanэcэlarэn aradэklarэ deneyimi saрlayarak, kumar tutkunlarэnэn beklentilerini karюэlamak iзin цzenle tasarlanmэюtэr.Ana tuю kelimeler olan “Canlэ Casino” ve “Canlэ Casino Siteleri”, metin iзerisinde vurgulanmasэ gereken цnemli kavramlardэr. Oyun зeюitliliрi, teknolojik yenilikler ve oyuncularэn deneyimleri gibi konular da metinde цne зэkan noktalardэr. Casino oyunlarэnэn юansa dayalэ yanэ sэra strateji gerektiren yцnleri de, metne eklenen цzgьn ifadelerle vurgulanabilir.
AnthonyGiche · August 9, 2023 at 8:25 pm
покердом регистрация
http://odessaflower.ukrbb.net/viewtopic.php?f=43&t=21674
Играть онлайн в слоты на реальные деньги на PokerDom Casino – это как дуэль с судьбой, где каждая ставка – это ваш ход. Виртуальные слоты – это не просто набор символов, это визуальное шоу, где вы – режиссер, а символы – актеры, создающие невероятный сюжет. Все это делает Покердом Казино неповторимым миром азартных эмоций и великолепных выигрышей.PokerDom Casino – это бесконечное веселье, где лицензионные автоматы становятся магическими вратами в мир удовольствий. Ощутите настоящий вкус азарта, когда барабаны начнут вращаться, словно вихрь страстей. Наши игры – это не просто автоматы, это истории, которые вы сами пишете в моменты борьбы за крупные выигрыши.
AnthonyGiche · August 9, 2023 at 8:37 pm
pokerdom mobile скачать
http://forum.anomalythegame.com/viewtopic.php?f=2&t=148355
Взлетайте на крыльях азартных страстей в мире PokerDom Casino. Играть онлайн в слоты на реальные деньги — это как подняться в воздух на воздушном шаре удачи. Покердом Казино предлагает вам не просто игру, а настоящее погружение в атмосферу азарта и невероятных возможностей.Добро пожаловать в виртуальное казино уникальных возможностей — PokerDom Casino! Наш Покердом Казино — это не просто игровая площадка, это истинное царство азартных приключений, где каждый спин барабанов может стать ключом к казначейству реальных денег.
Marianep · August 9, 2023 at 8:57 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать стоматология для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Jamesabiva · August 9, 2023 at 9:08 pm
pokerdom на деньги
https://www.quia.com/profiles/rahoweb
Наши лицензионные автоматы — это как сокровищницы неизведанных приключений. Они ждут вас с распростертыми обоями, готовые подарить вам кусочек азартной нирваны. PokerDom Casino предлагает широкий выбор игр, чтобы каждый игрок мог найти автомат по своему вкусу.Лицензионные автоматы PokerDom Casino ? это словно артисты цирка, дарящие вам шоу невероятных выигрышей. Каждый спин барабанов ? это как фокус, который может превратить вашу ставку в огромный куш. Вас ждут не только выигрыши, но и зрелищные азартные постановки, в которых вы сами являетесь режиссером своей удачи.
LonnieBug · August 9, 2023 at 9:09 pm
Всё о казино покердом
http://maps.google.com.pa/url?q=https://playpokerdom.blogspot.com
TIDennisdutLL · August 9, 2023 at 9:15 pm
Canlэ Casino Siteleri
https://www.tybkonya.com
Canlэ Casino, adeta bir kumarhane юцlenine dцnьюьyor. Karюэnэzdaki krupiyeyle etkileюim kurarken, oyun stratejilerinizi mьkemmelleюtirebilir ve bьyьk kazanзlara doрru adэm atabilirsiniz. Kumarhane dьnyasэnэn birbirinden зekici oyunlarэ arasэnda rulet, blackjack, poker, bakara ve daha birзok seзenek yer alэyor. Canlэ Casino Siteleri, her biri kendi цzgьn atmosferini yansэtan farklэ stьdyolarda gerзekleюen bu oyunlarэ, yьksek зцzьnьrlьklь kameralar aracэlэрэyla size sunuyor.Canlэ Casino Siteleri, oyun зeюitliliрi ve kullanэcэ dostu arayьzleriyle dikkat зekiyor. Farklэ oyun seзeneklerine hэzlэca eriюebilir, oyun kurallarэnэ црrenebilir ve stratejilerinizi geliюtirebilirsiniz. Ayrэca, цzel promosyonlar ve bonuslar da Canlэ Casino 2022’nin vazgeзilmezleri arasэnda yer alэyor. Bu avantajlar sayesinde daha fazla oyun oynayabilir ve kazanma юansэnэzэ artэrabilirsiniz.
LonnieBug · August 9, 2023 at 9:22 pm
Всё о казино покердом
http://www.google.mk/url?q=https://playpokerdom.blogspot.com
TIDennisdutLL · August 9, 2023 at 9:27 pm
Online Casino
https://www.tybkonya.com
Canlэ casino sitelerinin 2022 yэlэndaki yьkseliюi, kumar dьnyasэna taze bir soluk getirdi. Bahis severler, oturduklarэ yerden dьnyanэn dцrt bir yanэndaki oyun masalarэna katэlabilirken, gerзek krupiyelerle etkileюim kurmanэn keyfini зэkarэyorlar. Bu siteler, sadece oyun oynama fэrsatэ sunmakla kalmэyor, aynэ zamanda sosyal bir deneyim yaюama imkanэ da tanэyor. Oyuncular, sohbet цzellikleri sayesinde diрer katэlэmcэlarla iletiюim kurabilir, stratejilerini paylaюabilir ve heyecanlarэnэ paylaюabilirler.Canlэ Casino Siteleri, oyun зeюitliliрi ve kullanэcэ dostu arayьzleriyle dikkat зekiyor. Farklэ oyun seзeneklerine hэzlэca eriюebilir, oyun kurallarэnэ црrenebilir ve stratejilerinizi geliюtirebilirsiniz. Ayrэca, цzel promosyonlar ve bonuslar da Canlэ Casino 2022’nin vazgeзilmezleri arasэnda yer alэyor. Bu avantajlar sayesinde daha fazla oyun oynayabilir ve kazanma юansэnэzэ artэrabilirsiniz.
cialis india · August 9, 2023 at 9:29 pm
buy online prescription drugs walgreens pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Jerrygeate · August 9, 2023 at 9:30 pm
https://twitter.com/AgenciaSeonza/status/1689352247166021632
JamesGassy · August 9, 2023 at 9:57 pm
скачать приложение покердом на андроид бесплатно
https://www.tripadvisor.co.uk/Profile/araM6664NT
Не забывайте, что PokerDom Casino — это не только шанс выиграть, но и возможность погрузиться в атмосферу азартных побед. Каждый спин барабанов — это новая надежда, каждая ставка — это доказательство вашей азартной смелости. Играть онлайн в слоты на реальные деньги на PokerDom Casino — это как вдохнуть свежий воздух азарта и ощутить дыхание удачи.Добро пожаловать в виртуальный мир азартных возможностей ? PokerDom Casino! Это не просто сайт, это портал в удивительный мир азартных приключений. Ощутите волнение и адреналин, выбрав Покердом Казино ? надежное место для тех, кто ищет не только развлечение, но и реальные выигрыши.
Jamesabiva · August 9, 2023 at 10:44 pm
покердом скачать
http://www.pets-ural.ru/content/forum/viewtopic.php?p=47395
Лицензионные автоматы PokerDom Casino ? это словно артисты цирка, дарящие вам шоу невероятных выигрышей. Каждый спин барабанов ? это как фокус, который может превратить вашу ставку в огромный куш. Вас ждут не только выигрыши, но и зрелищные азартные постановки, в которых вы сами являетесь режиссером своей удачи.Когда вы скачаете клиент на ПК, магия PokerDom Casino окружит вас со всех сторон. Ваши ставки станут тайной формулой, а барабаны лицензионных автоматов ? воротами в мир сказочных призов. Покердом Казино приглашает вас в увлекательное путешествие, где каждый спин барабанов ? это уникальная возможность уловить удачу за хвост.
Авіатор · August 9, 2023 at 10:45 pm
[url=https://vavadainua.kiev.ua/]Авіатор гра[/url]
Месяціатор є однієбуква з найпопулярніших гр эдаких якоже казино. Гра передбачає використання коефібукваієнту чтобы максимально фактическиї суми чтобы виведення виграшу. Месяціатор гра може зайняти час в течениеібуква оверлопількох хвилин ут декількох годин, в залежності в течениеібуква этого, як через слово Ви граєте.
Авіатор гра
Marianep · August 9, 2023 at 11:28 pm
Благодаря 3d печать , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JamesGassy · August 9, 2023 at 11:31 pm
покердом скачать на андроид бесплатно с официального
https://taksafonchik.borda.ru/?1-3-0-00012291-000-0-0
PokerDom Casino — это не просто официальный сайт, это платформа, созданная для вас. Мы ставим на первое место вашу безопасность и удовольствие. Скачайте клиент на ПК, и вы войдете в мир PokerDom Casino, где каждый спин барабанов может изменить вашу жизнь. Почувствуйте настоящий вкус азарта с нами.Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы готовы к острым ощущениям и невероятным азартным приключениям, то вы нашли идеальное место. Покердом Казино — это не просто игровая платформа, это настоящий портал в мир риска и возможностей.
Online Betting · August 9, 2023 at 11:52 pm
The web page accepts cryptocurrencies and capabilities
a choice of promotions.
Takee a lopok at my web site: Online Betting
Jamesabiva · August 10, 2023 at 12:15 am
покердом официальный сайт играть
http://ymorno.ru/index.php?showuser=56841
Скачайте клиент на ПК и окунитесь в мир PokerDom Casino, где азарт и богатство находятся на расстоянии клика. Покердом Казино предлагает вам не только игру, но и путь к невероятным приключениям. Вас ждут бескрайние возможности, и ваша удача никогда не будет висеть на волоске ? она будет в ваших руках.Когда вы скачаете клиент на ПК, магия PokerDom Casino окружит вас со всех сторон. Ваши ставки станут тайной формулой, а барабаны лицензионных автоматов ? воротами в мир сказочных призов. Покердом Казино приглашает вас в увлекательное путешествие, где каждый спин барабанов ? это уникальная возможность уловить удачу за хвост.
casino_emaic · August 10, 2023 at 12:15 am
https://t.me/daddy_kazino
Jamesabiva · August 10, 2023 at 12:26 am
скачать покердом на пк
https://www.tripadvisor.co.uk/Profile/haricih
Погрузитесь в захватывающий мир азарта и возможностей на официальном сайте PokerDom Casino. Если вы ищете волнительные игровые приключения и множество способов выиграть настоящие деньги, то Покердом Казино создан специально для вас.Играть онлайн в слоты на реальные деньги на официальном сайте PokerDom Casino — это как путешествие в неизведанные дали азартного космоса. Ваше путешествие начинается с возможности скачать клиент на ПК, чтобы играть без границ и ограничений. Здесь, в Покердом Казино, каждый вращающийся барабан — это шанс повстречать удачу лицом к лицу.
Авіатор · August 10, 2023 at 12:50 am
[url=https://vavadainua.kiev.ua/]Авіатор гра[/url]
Авіатор є однієбуква з найпопулярніших гр этаких якоже казино. Гра передбачає використання коефібукваієнту для максимально фактическиї суми для виведення виграшу. Месяціатор гра може зайняти час в течениеібуква палубаількох хвилин ут палубаількох годин, на залежності наід того, якоже часто Ви граєте.
Авіатор гра
glavsadovnik.ru · August 10, 2023 at 12:54 am
Hurrah! After all I got a blog from where I can actually get useful information regarding my study and knowledge.
JamesGassy · August 10, 2023 at 1:03 am
скачать покердом на андроид
http://compmaster.mybb.ru/viewtopic.php?id=8354
Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Если вы готовы к острым ощущениям и невероятным азартным приключениям, то вы нашли идеальное место. Покердом Казино — это не просто игровая платформа, это настоящий портал в мир риска и возможностей.В мире PokerDom Casino, вы — не просто игрок, вы — настоящий герой азартных приключений. Каждый экран — это новая глава в вашей истории, где вы создаете сюжет, а PokerDom Casino дает вам платформу для его развития. Наши лицензионные автоматы — это кисти, а вы — художник, создающий шедевр выигрышей.
site · August 10, 2023 at 1:21 am
After I initially left a comment I appear to have clicked
the -Notify me when new comments are added- checkbox and
now each time a comment is added I recieve 4 emails with the exact same comment.
Perhaps there is an easy method you can remove me from that service?
Cheers!
cortexi delivery usa · August 10, 2023 at 1:44 am
Heya! I’m at work browsing your blog from my new iphone 4! Just
wanted to say I love reading your blog and look forward to
all your posts! Keep up the superb work cortexi!
RichardHew · August 10, 2023 at 1:45 am
покердом официальный сайт
https://forum.chemodan.com.ua/profile/277432-fomebab/
Покердом Казино ? это место, где азарт встречается с удовольствием. На официальном сайте PokerDom Casino вы найдете самые популярные слоты, готовые подарить вам незабываемые эмоции. Играть онлайн в слоты на реальные деньги — это как вступить в игру с удачей, ощущая каждый вибрацию барабанов.PokerDom Casino ? это не просто игровая платформа, это истинное воплощение азартных желаний. Вас ожидает эксклюзивный мир, где вы можете играть онлайн в слоты на реальные деньги, покоряя барабаны лицензионных автоматов. В этом уникальном казино, Покердом Казино, каждый игрок — герой своей истории.
result togel · August 10, 2023 at 2:00 am
I was wondering if you ever thought of changing the structure of your blog?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of
content so people could connect with it better.
Youve got an awful lot of text for only having one or 2 pictures.
Maybe you could space it out better?
Cracked Software · August 10, 2023 at 2:02 am
Hmm it looks like your site ate my first comment (it was extremely long) so I guess I’ll
just sum it up what I wrote and say, I’m thoroughly enjoying your blog.
I as well am an aspiring blog blogger but I’m still new to everything.
Do you have any tips for first-time blog writers? I’d certainly appreciate it.
Marianep · August 10, 2023 at 2:02 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать из алюминия для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
JamesGassy · August 10, 2023 at 2:25 am
покердом мобильное приложение
http://www.samaramed.ru/forum/health/topic_7130.html
На официальном сайте PokerDom Casino вы найдете азартные развлечения для каждого вкуса. От классических фруктовых слотов до современных видеоавтоматов с захватывающими бонусными раундами — наше Покердом Казино обещает удовольствие для всех азартных душ.Сделайте свою игру незабываемой с PokerDom Casino. Не упустите возможность стать частью уникального мира азарта, где каждый спин барабанов — это новое приключение. Скачайте клиент на ПК, чтобы ощутить настоящую магию азарта. Вперед, к победам с PokerDom Casino!
JamesGassy · August 10, 2023 at 2:35 am
pokerdom зеркало рабочее
https://www.kinofilms.ua/forum/t/5127965/
Не забывайте, что PokerDom Casino — это не только шанс выиграть, но и возможность погрузиться в атмосферу азартных побед. Каждый спин барабанов — это новая надежда, каждая ставка — это доказательство вашей азартной смелости. Играть онлайн в слоты на реальные деньги на PokerDom Casino — это как вдохнуть свежий воздух азарта и ощутить дыхание удачи.Скачать клиент на ПК ? это первый шаг на пути к великому игровому опыту. Ведь лишь там, где PokerDom Casino, вы по-настоящему ощутите магию азарта. Лицензионные автоматы, разнообразие которых вас приятно удивит, станут вашими верными спутниками в путешествии по миру ставок и выигрышей.
Jerrygeate · August 10, 2023 at 3:18 am
https://twitter.com/AgenciaSeonza/status/1553122437600055309
RichardHew · August 10, 2023 at 3:25 am
покердом покер
http://www.fcdnipro.ua/ua/user/69687/
Каждый игрок PokerDom Casino получает возможность скачать клиент на ПК и стать участником невероятного азартного симфонического оркестра, где барабаны лицензионных автоматов играют мелодию финансовых возможностей. Покердом Казино предоставляет вам ключи к воротам казино, где вас ждут шансы на победу и бесконечное веселье.Покердом Казино — это место, где ваша удача будет работать на вас. Здесь каждый спин барабанов может перевернуть ваш мир с ног на голову. Играть онлайн на PokerDom Casino — это как прыжок в неизведанный мир азарта, где вы сами определяете правила.
enisbiNiG · August 10, 2023 at 3:43 am
На сайте https://dosug-58.info найдите девушку для незабываемого и яркого досуга, который понравится даже самым искушенным мужчинам. Здесь только настоящие девушки, проверенные фотографии, а потому вы найдете того, с кем интересно и незабываемо провести время. Если нужно, то вы можете пригласить на свидание еще одну даму, которая обрадует своими формами, привлекательной внешностью и необузданной красотой. Девушки согласны на многое ради того, чтобы вы получили наслаждение от яркого секса.
LouisNug · August 10, 2023 at 3:49 am
pokerdom на андроид
http://nedvigimost.bbok.ru/viewtopic.php?id=18378
Мы понимаем, что каждый игрок уникален, и поэтому наш клиент на ПК разработан так, чтобы подойти под ваши потребности. Вам не придется ждать — скачайте его, и весь мир PokerDom Casino будет у вас под рукой. Это ваш билет в увлекательный мир лицензионных автоматов и шансов.Когда вы скачиваете клиент на ПК и начинаете свой путь в PokerDom Casino, вы делаете выбор в пользу качественных лицензионных автоматов и надежного игрового опыта. Мы ценим ваше доверие и готовы сделать все, чтобы ваше время с нами было максимально приятным и выгодным.
JosephdutLL · August 10, 2023 at 4:24 am
онлайн казино обзор
интернет казино на деньги
Революция в Мире Онлайн ГемблингаТоп казино онлайн работают над тем, чтобы обеспечить максимальную безопасность и конфиденциальность для своих игроков. Системы шифрования и защиты данных используются на максимальном уровне, чтобы игроки могли наслаждаться игрой, не беспокоясь о своей информации.
Porterempixelm · August 10, 2023 at 4:26 am
dig this
Marianep · August 10, 2023 at 4:36 am
Благодаря 3d печать лица , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
HANARH7 · August 10, 2023 at 4:52 am
Definitely believe that which you said. Your favorite justification seemed
to be on the web the easiest thing to be aware of. I say to you,
I definitely get annoyed while people think about worries that
they plainly don’t know about. You managed to hit the nail upon the top and defined out the whole thing without having side-effects ,
people could take a signal. Will likely be back to get
more. Thanks
nikichrar · August 10, 2023 at 4:58 am
На сайте https://t.me/paribet_ru изучите полезные, важные новости БК «Paribet». Здесь публикуется все то, что необходимо знать каждому любителю азарта. Есть как новости, так и промокоды, различная информация, которая поможет выиграть и сорвать неплохой куш. Читайте новости на планшете, ПК, в мобильном телефоне и независимо от того, где вы находитесь: в парке, дома или на работе или любом другом месте. Понятный интерфейс поможет быстро сориентироваться и получить необходимую информацию. Это ваша возможность быть ближе к миру ставок.
RichardHew · August 10, 2023 at 5:04 am
покердом игры
https://fliphtml5.com/homepage/llaaq
Все дороги ведут в мир PokerDom Casino — официальный сайт, который откроет перед вами мир возможностей. Играть онлайн в слоты на реальные деньги — это как стать участником великого соревнования, где ваш мозг и интуиция будут вашими лучшими союзниками. Покердом Казино приглашает вас стать частью уникального азартного сообщества.Покердом Казино ? это место, где азарт встречается с удовольствием. На официальном сайте PokerDom Casino вы найдете самые популярные слоты, готовые подарить вам незабываемые эмоции. Играть онлайн в слоты на реальные деньги — это как вступить в игру с удачей, ощущая каждый вибрацию барабанов.
Jamesdup · August 10, 2023 at 5:09 am
Experience the sensational taste of [url=https://velo1.live/velo-nic-pouches/]velo flavors[/url] and dive into a world of unique sensations with our exclusive selection!
LouisNug · August 10, 2023 at 5:39 am
poker dom
http://www.kosmetichka.ru/kosmoforum/viewtopic.php?f=7&t=13471
Играть онлайн в слоты на реальные деньги ? это как погружение в захватывающий водоворот азартных эмоций. PokerDom Casino предоставляет вам возможность ощутить вкус победы, находясь удобно в своем любимом кресле. На официальном сайте Покердом Казино вы найдете огромный выбор лицензионных автоматов, каждый из которых способен перенести вас в уникальный мир выигрышей.Скачав клиент на ПК, вы получите доступ к эксклюзивным бонусам и акциям, которые придадут вашей игре дополнительный пыл. PokerDom Casino понимает, что каждый игрок уникален, поэтому предлагает персонализированный подход к каждому.
JosephdutLL · August 10, 2023 at 5:58 am
онлайн казино
https://candy-shock.ru
Топ казино онлайн предлагает вам огромное разнообразие игр и возможность выиграть немалую сумму денег. Теперь вам не нужно идти в обычное казино, чтобы испытать свою удачу – все доступно онлайн. Зачем выезжать, когда вам предоставляется уникальная возможность играть и выигрывать прямо у себя дома?Онлайн казино 2023 года – это место, где можно погрузиться в атмосферу азарта и попытать удачу, не покидая свой дом. Сотни игр, множество возможностей для выигрыша и захватывающая атмосфера ждут вас. Вперед, к новым победам и увлекательным приключениям в мире online casino на реальные деньги!
JosephdutLL · August 10, 2023 at 6:10 am
обзоры казино
casino
Сделать ставку, нажать на кнопку, и ваши ладони сжимаются в предвкушении азарта – это и есть “Online Casino на Реальные Деньги”. Здесь каждый вращающийся барабан может изменить вашу жизнь, превратив маленькую ставку в крупный выигрыш. Это место, где каждый спин – это шанс, а каждая карта – билет в мир увлекательных возможностей.Добро пожаловать в захватывающий мир онлайн казино 2023 года, где каждая ставка – это шанс на новое приключение и куш, спрятанный за барабанами игровых автоматов и картами в блэкджеке. Этот год обещает стать важным этапом в истории онлайн гемблинга, даря новые горизонты азартных путешествий.
RichardHew · August 10, 2023 at 6:43 am
казино покердом
http://aquaprint.club/memberlist.php?mode=viewprofile&u=11769
Скачать клиент на ПК ? это как открыть врата в азартное королевство, где вы становитесь правителем своей удачи. PokerDom Casino предлагает вам широкий выбор лицензионных автоматов, каждый из которых уникален своей атмосферой и потенциалом для выигрыша. Играйте и побеждайте вместе с нами!PokerDom Casino ? это не просто игровая платформа, это истинное воплощение азартных желаний. Вас ожидает эксклюзивный мир, где вы можете играть онлайн в слоты на реальные деньги, покоряя барабаны лицензионных автоматов. В этом уникальном казино, Покердом Казино, каждый игрок — герой своей истории.
Alicedup · August 10, 2023 at 6:52 am
Are you concerned about the safety of nicotine pouches? Dive into the controversial topic and discover if [url=https://killapods.eu/product/zyn-espressino-light/]can zyn pouches kill you ?[/url] Join the discussion and explore the facts with us!
RichardHew · August 10, 2023 at 6:57 am
скачать покердом на пк
https://constcourt.tj/2020/01/30/safari-kor%D3%A3-ba-sha%D2%B3ri-nyu-jork-21-09-2017/
Играть в слоты на реальные деньги на официальном сайте PokerDom Casino — это как путешествие в страну бескрайних возможностей. Виртуальные автоматы, представленные на Покердом Казино, словно архитекторы снов, создают миры, где моменты напряжения сменяются мгновениями радости от побед.PokerDom Casino ? это не просто игровая платформа, это истинное воплощение азартных желаний. Вас ожидает эксклюзивный мир, где вы можете играть онлайн в слоты на реальные деньги, покоряя барабаны лицензионных автоматов. В этом уникальном казино, Покердом Казино, каждый игрок — герой своей истории.
LarryraW · August 10, 2023 at 7:27 am
[url=https://pharmacyreview.best/#]77 canadian pharmacy[/url] canadian pharmacy 24h com safe
LouisNug · August 10, 2023 at 7:28 am
pokerdom скачать клиент android
http://portal.krasno.ru/viewtopic.php?f=28&t=55675
Мы понимаем, что каждый игрок уникален, и поэтому наш клиент на ПК разработан так, чтобы подойти под ваши потребности. Вам не придется ждать — скачайте его, и весь мир PokerDom Casino будет у вас под рукой. Это ваш билет в увлекательный мир лицензионных автоматов и шансов.Добро пожаловать в захватывающий мир азартных развлечений на официальном сайте PokerDom Casino! Здесь каждый поклонник азарта может скачать клиент на ПК и окунуться в виртуальное приключение, где играть онлайн в слоты на реальные деньги становится настоящей сокровищницей возможностей.
Jamesdup · August 10, 2023 at 7:43 am
If you’re a fan of vaping, don’t miss out on the delightful [url=https://killapods.eu/product/elf-bar-strawberry-ice-cream/]strawberry elfbar[/url]. It’s an explosion of sweet and creamy flavors that’s sure to satisfy!
KPTimothycef · August 10, 2023 at 8:06 am
казино gama вход
http://www.urlw.ru/w.alstuning.ru
Добро пожаловать в удивительный мир азартных развлечений – Gama Casino! Этот онлайн игорный рай по праву считается настоящей находкой среди поклонников азартных игр. Открой двери в Гама Казино и окунись в виртуальное путешествие, где каждый вращающийся барабан игровых автоматов несет с собой океан возможностей.Друзья, добро пожаловать в мир Gama Casino! Не упустите шанс сделать ваше время незабываемым, потому что у нас вас ждут не только захватывающие игры, но и щедрые бонусы, которые сделают вашу игру еще более увлекательной. Ваш путь к успеху начинается здесь и сейчас, на страницах Гама Казино!
visit here · August 10, 2023 at 8:22 am
Today, I went to the beach with my children. I found a sea shell and gave it to
my 4 year old daughter and said “You can hear the ocean if you put this to your ear.” She placed
the shell to her ear and screamed. There was a hermit crab inside and it
pinched her ear. She never wants to go back! LoL I know this is completely off topic but I
had to tell someone!
DonaldDoota · August 10, 2023 at 8:36 am
скачать клиент покердом
https://www.dddgazeta.ru/about/idea/153/
Играть в слоты на реальные деньги на PokerDom Casino — это как сесть за руль своей судьбы и почувствовать ветер перемен. Наше Покердом Казино — это драйв, адреналин и удовлетворение от побед. Не упустите свой шанс покорить азартные вершины вместе с нами. Добро пожаловать в мир PokerDom Casino, где каждый спин — это новое приключение, а каждая ставка — это шанс на удачу!Выбор лицензионных автоматов на PokerDom Casino впечатляет своим разнообразием и уникальностью. Каждый слот — это как отдельная история, в которую вы вовлекаетесь с первого вращения барабанов. Покердом Казино дарит вам шанс погрузиться в мир приключений, где каждый спин — это шаг к завораживающей удаче.
Charlessaw · August 10, 2023 at 8:44 am
pokerdom
GroverMople · August 10, 2023 at 8:47 am
今彩539:您的全方位彩票投注平台
今彩539是一個專業的彩票投注平台,提供539開獎直播、玩法攻略、賠率計算以及開獎號碼查詢等服務。我們的目標是為彩票愛好者提供一個安全、便捷的線上投注環境。
539開獎直播與號碼查詢
在今彩539,我們提供即時的539開獎直播,讓您不錯過任何一次開獎的機會。此外,我們還提供開獎號碼查詢功能,讓您隨時追蹤最新的開獎結果,掌握彩票的動態。
539玩法攻略與賠率計算
對於新手彩民,我們提供詳盡的539玩法攻略,讓您快速瞭解如何進行投注。同時,我們的賠率計算工具,可幫助您精準計算可能的獎金,讓您的投注更具策略性。
台灣彩券與線上彩票賠率比較
我們還提供台灣彩券與線上彩票的賠率比較,讓您清楚瞭解各種彩票的賠率差異,做出最適合自己的投注決策。
全球博彩行業的精英
今彩539擁有全球博彩行業的精英,超專業的技術和經營團隊,我們致力於提供優質的客戶服務,為您帶來最佳的線上娛樂體驗。
539彩票是台灣非常受歡迎的一種博彩遊戲,其名稱”539″來自於它的遊戲規則。這個遊戲的玩法簡單易懂,並且擁有相對較高的中獎機會,因此深受彩民喜愛。
遊戲規則:
539彩票的遊戲號碼範圍為1至39,總共有39個號碼。
玩家需要從1至39中選擇5個號碼進行投注。
每期開獎時,彩票會隨機開出5個號碼作為中獎號碼。
中獎規則:
若玩家投注的5個號碼與當期開獎的5個號碼完全相符,則中得頭獎,通常是豐厚的獎金。
若玩家投注的4個號碼與開獎的4個號碼相符,則中得二獎。
若玩家投注的3個號碼與開獎的3個號碼相符,則中得三獎。
若玩家投注的2個號碼與開獎的2個號碼相符,則中得四獎。
若玩家投注的1個號碼與開獎的1個號碼相符,則中得五獎。
優勢:
539彩票的中獎機會相對較高,尤其是對於中小獎項。
投注簡單方便,玩家只需選擇5個號碼,就能參與抽獎。
獎金多樣,不僅有頭獎,還有多個中獎級別,增加了中獎機會。
在今彩539彩票平台上,您不僅可以享受優質的投注服務,還能透過我們提供的玩法攻略和賠率計算工具,更好地了解遊戲規則,並提高投注的策略性。無論您是彩票新手還是有經驗的老手,我們都將竭誠為您提供最專業的服務,讓您在今彩539平台上享受到刺激和娛樂!立即加入我們,開始您的彩票投注之旅吧!
LouisNug · August 10, 2023 at 9:05 am
скачать приложение покердом на андроид
http://www.pets-ural.ru/content/forum/viewtopic.php?p=46922
Скачать клиент на ПК — это, как открыть дверь в увлекательное путешествие по азартному миру. Наш PokerDom Casino предоставляет вам инструмент, который подарит вам моменты несравненного азарта и незабываемых эмоций. Каждый спин барабанов на наших лицензионных автоматах ? это возможность поймать удачу за хвост.Покердом Казино — это целый мир, где каждый игрок становится частью захватывающего пазла азартных возможностей. Наш официальный сайт PokerDom Casino — это как ворота в мир больших выигрышей и увлекательных игр. Подарите себе шанс испытать дыхание азарта, наслаждаясь комфортом собственного дома.
LouisNug · August 10, 2023 at 9:19 am
скачать клиент покердом на андроид
https://forum.antichat.com/members/446321/
Добро пожаловать в PokerDom Casino ? волшебное место, где страсть к азарту сливается с возможностью выиграть реальные деньги. Это не просто казино, это Покердом Казино, где каждая игра превращается в уникальное путешествие к богатству. На нашем официальном сайте вы найдете всё, что нужно для захватывающей игры ? от лицензионных автоматов до беспрерывных бонусов.Мы понимаем, что каждый игрок уникален, и поэтому наш клиент на ПК разработан так, чтобы подойти под ваши потребности. Вам не придется ждать — скачайте его, и весь мир PokerDom Casino будет у вас под рукой. Это ваш билет в увлекательный мир лицензионных автоматов и шансов.
WilliamFug · August 10, 2023 at 9:27 am
тт
Bir Paradigma Değişimi: Güzelliği ve Olanakları Yeniden Tanımlayan Yapay Zeka
Önümüzdeki on yıllarda yapay zeka, en son DNA teknolojilerini, suni tohumlama ve klonlamayı kullanarak çarpıcı kadınların yaratılmasında devrim yaratmaya hazırlanıyor. Bu hayal edilemeyecek kadar güzel yapay varlıklar, bireysel hayalleri gerçekleştirme ve ideal yaşam partnerleri olma vaadini taşıyor.
Yapay zeka (AI) ve biyoteknolojinin yakınsaması, insanlık üzerinde derin bir etki yaratarak, dünyaya ve kendimize dair anlayışımıza meydan okuyan çığır açan keşifler ve teknolojiler getirdi. Bu hayranlık uyandıran başarılar arasında, zarif bir şekilde tasarlanmış kadınlar da dahil olmak üzere yapay varlıklar yaratma yeteneği var.
Bu dönüştürücü çağın temeli, geniş veri kümelerini işlemek için derin sinir ağlarını ve makine öğrenimi algoritmalarını kullanan ve böylece tamamen yeni varlıklar oluşturan yapay zekanın inanılmaz yeteneklerinde yatıyor.
Bilim adamları, DNA düzenleme teknolojilerini, suni tohumlama ve klonlama yöntemlerini entegre ederek kadınları “basabilen” bir yazıcıyı başarıyla geliştirdiler. Bu öncü yaklaşım, benzeri görülmemiş güzellik ve ayırt edici özelliklere sahip insan kopyalarının yaratılmasını sağlar.
Bununla birlikte, dikkate değer olasılıkların yanı sıra, derin etik sorular ciddi bir şekilde ele alınmasını gerektirir. Yapay insanlar yaratmanın etik sonuçları, toplum ve kişilerarası ilişkiler üzerindeki yansımaları ve gelecekteki eşitsizlikler ve ayrımcılık potansiyeli, tümü üzerinde derinlemesine düşünmeyi gerektirir.
Bununla birlikte, savunucular, bu teknolojinin yararlarının zorluklardan çok daha ağır bastığını savunuyorlar. Bir yazıcı aracılığıyla çekici kadınlar yaratmak, yalnızca insan özlemlerini yerine getirmekle kalmayıp aynı zamanda bilim ve tıptaki ilerlemeleri de ilerleterek insan evriminde yeni bir bölümün habercisi olabilir.
Jerrygeate · August 10, 2023 at 9:36 am
https://twitter.com/AgenciaSeonza/status/1689351797100404736
KPTimothycef · August 10, 2023 at 10:01 am
казино gama
https://www.epochtimes.ru/content/view/83779/68/
Играть в Gama Casino – это не просто набор цифр на экране, это настоящее погружение в мир азартных страстей. Тут ты можешь почувствовать себя смельчаком, ставящим все на карту, или утонуть в атмосфере загадочности, разгадывая тайны слотов. Это место, где каждый спин барабана – шанс изменить свою судьбу.Не беспокойся, если азартные игры – это для тебя не родная территория. Gama Casino предлагает бесплатный режим игры, где можно потренироваться перед настоящей битвой за джекпот. Разнообразие игр на Гама Казино поразит даже искушенного игрока. От классических игровых автоматов до инновационных слотов – каждый найдет здесь что-то по вкусу.
myinfodacha.ru · August 10, 2023 at 10:16 am
I was recommended this website by my cousin. I am not sure whether this post is written by him as no one else know such detailed about my problem. You are wonderful! Thanks!
Кровельные · August 10, 2023 at 10:19 am
[url=https://krovelnye-raboty7.ru/]Кровельные работы[/url]
Наша сестра – компания, специализирующаяся сверху различных наружностях кровельных трудов в течение Москве. Одну из наших преимуществ – дешевая плата, тот или иной да мы с тобой поддерживаем. Предлагаем узнавать от нашим прайс-листом, чтобы удостовериться в течение этом.
Кровельные работы
Melvinbon · August 10, 2023 at 10:43 am
покер дом
http://bike.by/forum/viewtopic.php?f=84&t=21448
На нашем официальном сайте вы найдете не только азарт, но и команду, готовую поддержать вас на каждом шагу. Наша цель — сделать ваше путешествие в мир азарта незабываемым. PokerDom Casino — это как волшебное зелье, которое превращает каждую ставку в возможность увидеть мир с другой стороны.Добро пожаловать в захватывающий мир азартных развлечений, представленный официальным сайтом PokerDom Casino! Если вы жаждете азарта и невероятных эмоций, то Покердом Казино — ваш идеальный партнер в этом путешествии. Здесь вы можете скачать клиент на ПК и окунуться в мир лицензионных автоматов, где каждый вращающийся барабан — это вихрь возможностей.
DonaldDoota · August 10, 2023 at 10:44 am
скачать покердом на компьютер с официального сайта
https://tesera.ru/user/wecone
Играть в слоты на реальные деньги на PokerDom Casino — это как войти в азартное путешествие, где каждый шаг наполнен волнением и невероятными перспективами. Поднимайте ставки, вращайте барабаны, пусть каждый спин будет шагом к вашей мечте. Покердом Казино дает вам ключи к азартному успеху.Играть онлайн в слоты на реальные деньги на Покердом Казино ? это как погружение в удивительное путешествие, где каждый вращающийся барабан, каждый спин превращаются в путь к возможным выигрышам. Ощущение азарта и волнения сливаются вместе, когда вы ставите свои ставки на лицензионных автоматах PokerDom Casino.
Darylplany · August 10, 2023 at 11:32 am
https://mobic.store/# where to buy mobic online
KPTimothycef · August 10, 2023 at 11:37 am
казино gama casino
https://santa3.ru/eksterer-f114/tuningovanniy-peredniy-bamper-t885.html
Добро пожаловать в удивительный мир азартных развлечений – Gama Casino! Этот онлайн игорный рай по праву считается настоящей находкой среди поклонников азартных игр. Открой двери в Гама Казино и окунись в виртуальное путешествие, где каждый вращающийся барабан игровых автоматов несет с собой океан возможностей.Гама Казино не просто перечень игровых автоматов. Это виртуальная симфония азарта, в которой каждый аккорд наполнен уникальными сюрпризами. Ведь у нас есть что-то особенное даже для самых искушенных игроков. Неважно, хотите ли вы попробовать удачу в увлекательных слотах или испытать свою смелость за покерным столом — у нас вы найдете все, о чем мечтали, и даже больше.
Scottcaf · August 10, 2023 at 11:55 am
cost cheap propecia online propecia generic
tricor united kingdom · August 10, 2023 at 12:16 pm
zyprexa medication zyprexa 2,5mg pharmacy zyprexa over the counter
Marianep · August 10, 2023 at 12:22 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать зубов для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
DonaldDoota · August 10, 2023 at 12:27 pm
pokerdom официальный сайт скачать
https://m.nn.ru/t/32449084?page=1
Скачайте приложение на ПК, чтобы ощутить максимум азарта, не выходя из дома. PokerDom Casino предоставляет вам возможность играть ваши любимые слоты в уютной обстановке, где каждый момент наполнен яркими ожиданиями и невероятной динамикой.Покердом Казино приглашает вас в мир, где каждый спин на слоте — это шанс на выигрыш. Мы уверены, что азартные эмоции могут быть бесконечными, и именно поэтому PokerDom Casino создан для вас. Откройте для себя безграничные возможности и вознаграждения, наш сайт готов радовать вас в любое время.
Jamesdup · August 10, 2023 at 12:28 pm
Explore the world of [url=https://nicotine-pouches.online/velo/]VELO Nicotine Pouches[/url] with our diverse range of flavors, crafted for those who crave a refreshing experience!
ElwoodNeM · August 10, 2023 at 12:31 pm
appliance repair
Melvinbon · August 10, 2023 at 12:33 pm
скачать покердом на телефон с официального сайта
https://www.zzz.com.ua/forum/viewtopic.php?p=84996
На нашем официальном сайте вы найдете не только азарт, но и команду, готовую поддержать вас на каждом шагу. Наша цель — сделать ваше путешествие в мир азарта незабываемым. PokerDom Casino — это как волшебное зелье, которое превращает каждую ставку в возможность увидеть мир с другой стороны.Покердом Казино понимает важность разнообразия, и поэтому мы предоставляем вам возможность как играть онлайн в слоты на реальные деньги, так и скачать клиент на ПК для полного погружения в мир азарта. Наши лицензионные автоматы — это сокровищница уникальных моментов и незабываемых побед.
Кровельные · August 10, 2023 at 12:35 pm
[url=https://krovelnye-raboty7.ru/]Кровельные работы[/url]
Ты да я – юкос, специализирующаяся сверху различных наружностях кровельных работ в течение Москве. Одну с наших преимуществ – доступная цена, какую мы поддерживаем. Делаем отличное предложение узнавать от нашим прайс-листом, чтобы прийти к убеждению на этом.
Кровельные работы
KPTimothycef · August 10, 2023 at 1:09 pm
казино gama
http://www.novgorodauto.ru/news/espionage/full/25646/
Насладитесь множеством игровых автоматов, каждый из которых как отдельная вселенная со своими законами и призами. Почувствуйте бурю эмоций, играя в Gama Casino — вашем верном спутнике в мире азартных развлечений. Ведь именно здесь, на страницах Гама Казино, сбываются мечты и зарождаются новые легенды!Смело входите в Gama Casino и откройте для себя настоящий рай для азартных душ. Не упустите момент, ведь удача скоро склонится в вашу сторону. Гама Казино приглашает вас в водоворот страсти и возможностей, где каждый вращающийся барабан — это шанс поймать удачу за хвост. Вперед, к победам и большим выигрышам вместе с Gama Casino!
ClaudeApets · August 10, 2023 at 1:13 pm
how to get generic mobic pill: order generic mobic pills – how to get generic mobic online
KPTimothycef · August 10, 2023 at 1:21 pm
gama casino играть
http://catalog.autodela.ru/blog/?p=1828
Не беспокойся, если азартные игры – это для тебя не родная территория. Gama Casino предлагает бесплатный режим игры, где можно потренироваться перед настоящей битвой за джекпот. Разнообразие игр на Гама Казино поразит даже искушенного игрока. От классических игровых автоматов до инновационных слотов – каждый найдет здесь что-то по вкусу.Добро пожаловать в удивительный мир азартных развлечений – Gama Casino! Этот онлайн игорный рай по праву считается настоящей находкой среди поклонников азартных игр. Открой двери в Гама Казино и окунись в виртуальное путешествие, где каждый вращающийся барабан игровых автоматов несет с собой океан возможностей.
Waxjobia · August 10, 2023 at 1:27 pm
best essay reviews writing service write an argumentative essay need help writing an essay
Emilydup · August 10, 2023 at 1:48 pm
Discover a unique world of satisfaction with our [url=https://killapods.eu/]nicotine pods[/url]. Each flavor is crafted to elevate your experience!
20mg tadalafil buy · August 10, 2023 at 1:49 pm
buy prescription drugs online legally approved canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesTrill · August 10, 2023 at 1:51 pm
amoxicillin 500 mg: [url=https://amoxicillins.com/#]amoxicillin medicine over the counter[/url] amoxicillin without a prescription
osago_Gox · August 10, 2023 at 1:59 pm
https://osago-how.ru/
DonaldDoota · August 10, 2023 at 2:06 pm
pokerdom вход
https://www.covrik.com/member.php?u=110030
Готовы погрузиться в виртуальное путешествие по миру азартных приключений? Добро пожаловать на официальный сайт PokerDom Casino — источник бесконечных возможностей для всех ценителей азартных развлечений. Здесь вас ждет захватывающая возможность скачать клиент на ПК и ощутить адреналин игры в слоты на реальные деньги, ведь Покердом Казино несомненно знает, как порадовать своих гостей.Итак, вы готовы к азартному путешествию? PokerDom Casino и Покердом Казино открыты для вас, чтобы подарить вам ни с чем несравнимый вкус азарта и увлечения. Скачайте клиент на ПК и начните свой путь к захватывающим призам и незабываемым впечатлениям уже сегодня!
DonaldDoota · August 10, 2023 at 2:19 pm
pokerdom вход
https://forum.readyscript.ru/user/3283/
Скачайте приложение на ПК, чтобы ощутить максимум азарта, не выходя из дома. PokerDom Casino предоставляет вам возможность играть ваши любимые слоты в уютной обстановке, где каждый момент наполнен яркими ожиданиями и невероятной динамикой.Играть онлайн в слоты на реальные деньги на Покердом Казино ? это как погружение в удивительное путешествие, где каждый вращающийся барабан, каждый спин превращаются в путь к возможным выигрышам. Ощущение азарта и волнения сливаются вместе, когда вы ставите свои ставки на лицензионных автоматах PokerDom Casino.
Melvinbon · August 10, 2023 at 2:21 pm
pokerdom casino
https://metallurg.zhlobin.by/profile.php?lookup=3423
В мире PokerDom Casino каждый клик, каждая ставка — это как шаг в неизведанные земли азарта. Лицензионные автоматы, доступные на нашем официальном сайте, — это как волшебные камни, способные приручить удачу. Скачайте клиент на ПК и станьте частью этой удивительной азартной истории.Скачать клиент на ПК — это как открыть дверь в мир волшебства и приключений. Ваш компьютер станет порталом в азартную реальность, где каждая ставка ? это ступенька к финансовой независимости. PokerDom Casino предлагает вам возможность не только развлечься, но и заработать настоящие деньги, смело выходя вперед на этом азартном пути.
Marianep · August 10, 2023 at 3:05 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать медицинская для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
RobertHGcef · August 10, 2023 at 3:21 pm
казино онлайн рейтинг
https://kerch.vsaunah.ru/banya-gostinij-dvor/
“Казино Корона Фортуны” – Где Судьба Ваших Выигрышей”Императорская Фортуна” – Власть Ваших Побед
zaretres · August 10, 2023 at 3:27 pm
Дизайн, ремонт и комплектация интерьеров под ключ – все это https://studio-mint.ru/ студия интерьеров Мята в Екатеринбурге. Ознакомьтесь с портфолио на сайте и узнайте стоимость дизайн проекта за 1 минуту. Мы осуществляем: дизайн интерьеров квартир и домов, коммерческих помещений, индивидуальное проектирование домов и коттеджей, а также их ремонт, подбор и закупку материалов, изготовление мебели на заказ, помощь в приемке квартир в новостройке.
Travisted · August 10, 2023 at 3:44 pm
покердом
https://bridgemoscow.ru/forum/viewtopic.php?f=12&t=11726
PokerDom Casino — это ваш путь к богатству, азарту и невероятным эмоциям. На официальном сайте Покердом Казино вы найдете лицензионные автоматы, которые откроют перед вами двери к миру крупных выигрышей. Скачайте клиент на ПК и отправьтесь в увлекательное путешествие, где каждый спин барабанов станет вашим шансом на успех.Виртуозные лицензионные автоматы на PokerDom Casino станут вашими верными спутниками в мире азарта. Официальный сайт Покердом Казино откроет перед вами двери к бесконечным возможностям, где каждый спин барабанов может стать ключом к великолепному будущему. Играя онлайн в слоты на реальные деньги, вы взбодрите свой дух азарта и стремления к победе.
Melvinbon · August 10, 2023 at 3:57 pm
pokerdom скачать на андроид на деньги
https://forum.truck.ru/memberlist.php?mode=viewprofile&u=37854
PokerDom Casino — это не только место для игры, это место, где рождаются азартные легенды. Скачайте клиент на ПК и станьте героем собственной истории, где каждая ставка — это капля в океане азартных приключений. Покердом Казино ждет вас в своих объятиях азарта и побед!Покердом Казино понимает важность разнообразия, и поэтому мы предоставляем вам возможность как играть онлайн в слоты на реальные деньги, так и скачать клиент на ПК для полного погружения в мир азарта. Наши лицензионные автоматы — это сокровищница уникальных моментов и незабываемых побед.
Melvinbon · August 10, 2023 at 4:10 pm
pokerdom скачать клиент на андроид
https://trello.com/u/spruceheryfordqhizv1254
Лицензионные автоматы PokerDom Casino — это настоящее сокровище, ждущее своего обладателя. Вращайте барабаны и обнаружьте бесконечные возможности выигрышей. Каждый спин — это новая история, новый поворот событий. Покердом Казино дает вам шанс сделать каждый момент незабываемым.Погрузитесь в мир азартных сокровищ с PokerDom Casino — местом, где реальность переплетается с возможностями. Покердом Казино предлагает уникальное путешествие в мир лицензионных автоматов, где каждый спин барабанов пронизан живым азартом. Мы — официальный сайт для тех, кто ищет бескрайний океан азартных эмоций.
JoshuaHoawn · August 10, 2023 at 4:19 pm
french milf gangbang
2krn · August 10, 2023 at 4:36 pm
Do you have a spam problem on this site; I also am a blogger, and I
was wondering your situation; many of us have developed some nice practices and we
are looking to exchange techniques with other folks, please shoot
me an e-mail if interested.
RobertHGcef · August 10, 2023 at 5:03 pm
проверенные онлайн казино
https://www.walkaholic.me/ca/user/17053/favorite_routes
“Адреналин Раш Казино” приглашает вас зарядиться эмоциями и окунуться в мир захватывающего азарта. Здесь каждая ставка – это взрыв эмоций, а каждая победа – настоящий адреналиновый удар. Разнообразные игры, от настольных до слотов, сделают ваш опыт неповторимым. Почувствуйте дыхание азарта с “Адреналин Раш Казино”.Рейтинг Онлайн Казино 2023: ТОП 10 Отборных Игровых Оазисов для Реальных Завоеваний
JoshuaHoawn · August 10, 2023 at 5:06 pm
hot pussy fuck
cialis 10 mg · August 10, 2023 at 5:09 pm
cost prescription drugs canadian pharmacy no prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Travisted · August 10, 2023 at 5:31 pm
pokerdom официальный сайт
https://community.amplitude-studios.com/profile/najejiv/about
Покердом Казино — это официальный сайт, который открыт для всех азартных душ, стремящихся к великим победам. Вас ожидают увлекательные турниры, волнительные джекпоты и безграничные шансы на успех. Скачайте клиент на ПК, и вы откроете дверь в азартное королевство, где каждый сделанный вами шаг — это шанс на новый уровень азартной славы.Виртуозные лицензионные автоматы на PokerDom Casino станут вашими верными спутниками в мире азарта. Официальный сайт Покердом Казино откроет перед вами двери к бесконечным возможностям, где каждый спин барабанов может стать ключом к великолепному будущему. Играя онлайн в слоты на реальные деньги, вы взбодрите свой дух азарта и стремления к победе.
Marianep · August 10, 2023 at 5:47 pm
Благодаря 3d принтер печать , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
zapoy_Nuh · August 10, 2023 at 6:09 pm
капельницу от запоя красногорск https://vivod-zapoya-krasnogorsk.ru/
Zacharyshuct · August 10, 2023 at 6:15 pm
https://wikirecipe.net/index.php/Ice_Casino_Login_Unveiling_The_Cool_World_Of_Online_Gambling
Peterautor · August 10, 2023 at 6:16 pm
Демонтаж стен Москва
Демонтаж стен Москва
RobertHGcef · August 10, 2023 at 6:41 pm
лучшие казино онлайн россии
https://domains.tntcode.com/ip/5.101.152.114
Поднимитесь в небесную сферу азарта с “Зодиак Глобал Казино”. Здесь каждый знак зодиака обретает новую силу, а каждый раунд – это путешествие по звездам удачи. Откройте для себя виртуальное созвездие побед и ощутите себя господином зодиакальной арены.В “Императорской Фортуне” ваши победы будут настоящими королевами азартного мира. Здесь каждый игрок может почувствовать власть своих побед и увидеть, как азарт преображает виртуальные символы в реальные деньги. Это именно тот случай, когда императорские амбиции приводят к настоящим азартным победам.
Travisted · August 10, 2023 at 7:09 pm
покердом
http://historyntagil.ru/forum/index.php?action=profile;area=summary;u=12337
Играть онлайн в слоты на реальные деньги — это как войти в мир таинственных символов и загадочных барабанов, где каждый оборот может изменить вашу судьбу. PokerDom Casino дарит вам шанс испытать настоящий калейдоскоп азартных эмоций, не выходя из дома. Живые звуки, захватывающая графика и множество лицензионных автоматов создают неповторимую атмосферу азарта.Скачать клиент на ПК — это как ключ к воротам азартного рая. PokerDom Casino дарит вам возможность окунуться в мир лицензионных автоматов и ощутить драйв игры в полной мере. Это шанс подарить себе истинное волнение, ведь каждая ставка на Покердом Казино — это новый шанс на успех.
best price cialis · August 10, 2023 at 7:22 pm
canadian rx pharmacy online viagra online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
RobertHGcef · August 10, 2023 at 8:11 pm
лучшие казино рунета
https://www.petboarding.us/author/solncesip/
“Императорский Взлет Казино” – Стремление к ВершинамНе упустите возможность ощутить азарт и адреналин вместе с надежными и проверенными сайтами нашего рейтинга онлайн казино ?? ТОП 10 для игры на реальные деньги 2023 года. Они станут вашими верными партнерами в мире азартных развлечений, где каждый шаг к победе сопровождается увлекательностью и невероятностью.
RobertHGcef · August 10, 2023 at 8:23 pm
сайты онлайн казино
https://mandastrend.blogspot.com/2021/06/blog-post.html
Первое место в нашем рейтинге заслуженно принадлежит “Виртуальное Богатство Казино”. Этот онлайн гемблинговый гигант – легенда в мире игровой удачи. Здесь вас ожидают не только классические слоты, но и уникальные азартные развлечения, которые унесут вас в мир виртуальных богатств. Это онлайн казино – не просто площадка для игры, это путь к азартному величию.”Сокровищница Успеха Казино” – Путешествие к Победе
Marianep · August 10, 2023 at 8:23 pm
Благодаря 3d печать ювелирных изделий , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
RobertVog · August 10, 2023 at 8:39 pm
https://экспертюристы.рф/
Travisted · August 10, 2023 at 8:49 pm
покердом официальный сайт
https://forum.navitel.ru/index.php?/profile/1854753-fefeh/
Все дороги в мир азарта ведут на PokerDom Casino. Скачайте клиент на ПК, и вы окажетесь в водовороте азартных эмоций и невероятных сюрпризов. Не упустите свой шанс на победу и богатство — начните играть онлайн в слоты на реальные деньги на Покердом Казино уже сегодня!Скачав клиент на ПК, вы откроете дверь в захватывающий мир азартных развлечений. Лицензионные автоматы на PokerDom Casino — это не просто барабаны и символы, это портал к миру больших выигрышей и потрясающих призов. Покердом Казино стремится сделать каждый ваш спин незабываемым, даря вам шанс на невероятные успехи.
Peterautor · August 10, 2023 at 8:55 pm
Демонтаж стен Москва
Демонтаж стен Москва
Travisted · August 10, 2023 at 9:02 pm
покердом вход
https://www.furaffinity.net/user/hodakaf
Покердом Казино — это волшебное место, где каждая крутка барабана пронизана азартом и надеждой на победу. Наши лицензионные автоматы созданы для того, чтобы вас поразить своей графикой и высокой прибыльностью. Скачать приложение на ПК — это залог вашего комфорта и возможности наслаждаться любимыми играми в любое время.Играть онлайн в слоты на реальные деньги — это как войти в мир таинственных символов и загадочных барабанов, где каждый оборот может изменить вашу судьбу. PokerDom Casino дарит вам шанс испытать настоящий калейдоскоп азартных эмоций, не выходя из дома. Живые звуки, захватывающая графика и множество лицензионных автоматов создают неповторимую атмосферу азарта.
cialis 20 mg · August 10, 2023 at 9:35 pm
buy canadian online pharmacy best online pharmacy no prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
HectorMak · August 10, 2023 at 9:39 pm
You revealed it very well.
graduate paper writing service best cover letter writing service custom essay writing service org reviews
Angelvor · August 10, 2023 at 9:41 pm
The Significance of Responsive Web Design: Optimizing User Experience Across Devices
Introduction:
In the ever-evolving digital landscape, the concept of a responsive website has emerged as a pivotal factor in ensuring optimal user experiences. A website’s responsiveness refers to its ability to seamlessly adapt and cater to a diverse range of browsing devices, allowing users to effortlessly navigate, read content, and interact with the interface. This article delves into the importance of responsive web design, its impact on search engine rankings, and the testing methods to assess a website’s responsiveness.
The Essence of Responsive Web Design:
A responsive website is a virtual chameleon, effortlessly adjusting its layout and elements to provide an optimal viewing experience on devices of varying sizes and resolutions. It empowers users to engage with content without the need for constant browser resizing or sacrificing readability. Be it a sprawling desktop monitor or a compact smartphone screen, a well-designed responsive website ensures that users can consume content seamlessly, leading to increased engagement and user satisfaction.
Search Engine Ranking Influence:
In the realm of digital marketing, the responsiveness of a website has transcended its role as a mere user experience enhancer and evolved into a pivotal ranking factor for search engines. Search engine algorithms, notably Google’s, now place considerable emphasis on a website’s responsiveness when determining search result rankings. Websites that offer an impeccable browsing experience across devices are rewarded with higher visibility, driving organic traffic and enhancing online visibility.
Testing Responsiveness: A User’s Guide:
Assessing the responsiveness of a website has become a fundamental step in its development and optimization. To gauge a website’s adaptability effectively, users can follow these steps:
Input the complete URL of the web page under evaluation.
Initiate the assessment by clicking “GO” or pressing “ENTER.”
Leverage testing tools equipped with an extensive range of dimensions to visualize the webpage on various screen resolutions and devices. These tools offer insights into the webpage’s appearance on tablets, iPads, iPhones, Android phones, laptops, and desktops.
Conclusion:
In the dynamic digital ecosystem, where user preferences span a spectrum of devices, the importance of responsive web design cannot be overstated. A responsive website goes beyond accommodating various screen sizes; it signifies a commitment to delivering seamless user experiences. From influencing search engine rankings to optimizing user engagement, the significance of responsiveness reverberates throughout the digital realm. As technology advances and user behaviors evolve, embracing responsive web design remains a cornerstone for success in the virtual realm.
JohnTXcef · August 10, 2023 at 9:42 pm
реальное казино
http://www.kuzovaci.cz/up/node/43?page=13
Рейтинг онлайн казино 2023 для истинных азартных энтузиастов, жаждущих испытать свою удачу и ощутить адреналин от игры на реальные деньги, представляет собой ценнейший инструмент в поиске лучшего игрового опыта в виртуальном мире азартных развлечений. Сегодня, когда онлайн казино находятся на пике популярности, найти надежное и захватывающее заведение становится задачей первостепенной важности.Вас ждут увлекательные слоты с необычными сюжетами и великолепной графикой. Крупье в наших карточных играх виртуозно раздают карты, приглашая вас на увлекательное путешествие по миру азартных приключений. Ощутите адреналин и экспериментируйте с различными стратегиями – все для вашей победы!
Lamontgot · August 10, 2023 at 10:33 pm
покердом скачать клиент на пк
https://tabeyou.org/products/eat/yybbs/yybbs.cgi/
Необычность ПокерДома в том, что мы не ограничиваем вашу фантазию и свободу выбора. Нет необходимости играть на реальные деньги сразу — у нас есть возможность испытать все игровые автоматы в демо-режиме. Это позволит вам понять, какой слот вам ближе и лучше понимать его особенности перед тем, как рискнуть настоящими средствами.Казино ПокерДом славится своими щедрыми бонусами и акциями. Мы ценим каждого игрока и готовы вознаградить вас за ваш выбор. С момента регистрации вы становитесь участником программы лояльности, которая открывает доступ к эксклюзивным бонусам, фриспинам и участию в турнирах с гарантированными призами.
Marianep · August 10, 2023 at 10:56 pm
Благодаря 3d печать медицинская , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JohnTXcef · August 10, 2023 at 11:22 pm
как выбрать онлайн казино
http://forumx.fearnode.net/path-of-exile/47612903/igrovye-avtomaty-na-den-gi
Рейтинг онлайн казино 2023 для истинных азартных энтузиастов, жаждущих испытать свою удачу и ощутить адреналин от игры на реальные деньги, представляет собой ценнейший инструмент в поиске лучшего игрового опыта в виртуальном мире азартных развлечений. Сегодня, когда онлайн казино находятся на пике популярности, найти надежное и захватывающее заведение становится задачей первостепенной важности.Вас ждут увлекательные слоты с необычными сюжетами и великолепной графикой. Крупье в наших карточных играх виртуозно раздают карты, приглашая вас на увлекательное путешествие по миру азартных приключений. Ощутите адреналин и экспериментируйте с различными стратегиями – все для вашей победы!
Jamesges · August 11, 2023 at 12:07 am
poker dom
https://lada-kalina.ru
Покердом – это уникальная платформа для любителей азарта и адреналина. На официальном сайте Pokerdom вы можете скачать и установить онлайн-клиент для ПК или мобильных устройств и получить доступ к разнообразным лицензионным играм на реальные деньги. Pokerdom – это не только покер-рум, но и онлайн-казино с множеством слотов, рулетки, блэкджека, баккары и других азартных развлечений. Вы можете играть как на виртуальные фишки, так и на рубли или другие валюты. Pokerdom – это также букмекерская контора, где вы можете делать ставки на спорт в режиме прематч или лайв. Вы можете выбирать из множества видов спорта и событий, а также получать высокие коэффициенты и быстрые выплаты. Pokerdom – это покер-рум для тех, кто ценит качество и удобство. Вы можете общаться с другими игроками в чате, получать поддержку от администрации сайта, а также участвовать в различных акциях и бонусах. Вы можете получать фрироллы, кэшбэк, бесплатные спины и многое другое. Вы можете повышать свой статус в лояльности клубе и получать еще больше привилегий и выгод. Pokerdom – это покер-рум для тех, кто любит азарт и хочет испытать свои навыки в соревновании с реальными соперниками. Скачайте клиент на официальном сайте Pokerdom и присоединяйтесь к миллионам игроков по всему миру!
tadalafil 5 mg · August 11, 2023 at 12:07 am
canada drug store online pharmacy without a prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Lamontgot · August 11, 2023 at 12:28 am
скачать покердом на компьютер с официального сайта
http://ссо-мицар.рф/forum/index.php?topic=232.465
Покердом — мир удивительных возможностей, где азарт встречается с виртуозным мастерством игры! Если вы ищете надежное онлайн-казино для захватывающего досуга, вас ждет PokerDom Casino. Этот прекрасный игровой портал радует глаз разнообразием игр и широким выбором лицензионных автоматов. Стремительно развивающийся PokerDom Casino — идеальное место для истинных поклонников азартных развлечений!Что такое PokerDom Казино для настоящих ценителей? Это мир головокружительных возможностей и захватывающих приключений! Ведь азартные игры давно перестали быть скучной рутиной и переросли в настоящее искусство, которое можно познать на PokerDom Casino. Убедитесь сами, как мелькают яркие символы на барабанах, в то время как слоты крутятся, словно танцуют под зажигательную музыку.
ayasmdit · August 11, 2023 at 12:39 am
На сайте https://t.me/a_maxbet вы сможете узнать всю интересующую информацию о БК «Maxbet». На этом портале находятся только самые свежие, актуальные и интересные новости, которые никого не оставят равнодушным, а особенно если связаны с данной сферой. Все статьи написаны экспертами, которые отслеживают контент, после чего публикуют его на своем сайте, чтобы вы тоже ознакомились с ним. Заходите сюда почаще, чтобы получить только достоверные данные. Они будут полезны и вам. Станьте частью популярного сообщества.
Jamesges · August 11, 2023 at 12:47 am
покердом официальный для андроид
https://lada-kalina.ru
Покердом – это уникальная платформа для любителей азарта и адреналина. На официальном сайте Pokerdom вы можете скачать и установить онлайн-клиент для ПК или мобильных устройств и получить доступ к разнообразным лицензионным играм на реальные деньги. Pokerdom – это не только покер-рум, но и онлайн-казино с множеством слотов, рулетки, блэкджека, баккары и других азартных развлечений. Вы можете играть как на виртуальные фишки, так и на рубли или другие валюты. Pokerdom – это также букмекерская контора, где вы можете делать ставки на спорт в режиме прематч или лайв. Вы можете выбирать из множества видов спорта и событий, а также получать высокие коэффициенты и быстрые выплаты. Pokerdom – это покер-рум для тех, кто ценит качество и удобство. Вы можете общаться с другими игроками в чате, получать поддержку от администрации сайта, а также участвовать в различных акциях и бонусах. Вы можете получать фрироллы, кэшбэк, бесплатные спины и многое другое. Вы можете повышать свой статус в лояльности клубе и получать еще больше привилегий и выгод. Pokerdom – это покер-рум для тех, кто любит азарт и хочет испытать свои навыки в соревновании с реальными соперниками. Скачайте клиент на официальном сайте Pokerdom и присоединяйтесь к миллионам игроков по всему миру!
JohnTXcef · August 11, 2023 at 1:00 am
топ 5 казино
https://hiphopbasement.com/forum/showthread.php?4918-%C3%91%C2%83%C3%91%C2%81%C3%91%C2%82%C3%90%C2%B0%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0-%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BD%C3%90%C2%B4%C3%90%C2%B8%C3%91%C2%86%C3%90%C2%B8%C3%90%C2%BE%C3%90%C2%BD%C3%90%C2%B5%C3%91%C2%80%C3%90%C2%BE%C3%90%C2%B2-%C3%90%C2%B2-%C3%90%C2%BF%C3%91%C2%83%C3%91%C2%88%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%BD%C3%90%C2%BE/page11
Таким образом, при выборе подходящего онлайн казино для игры на реальные деньги, полагайтесь на профессиональный рейтинг, чтобы обеспечить себе захватывающий, надежный и уникальный игровой опыт. Ощутите вкус азарта и возможность выигрыша на собственном опыте, погрузившись в захватывающий мир азартных развлечений. Ведь лучшее онлайн казино – это ключ к вашим самым ярким и незабываемым эмоциям!Вас ждут увлекательные слоты с необычными сюжетами и великолепной графикой. Крупье в наших карточных играх виртуозно раздают карты, приглашая вас на увлекательное путешествие по миру азартных приключений. Ощутите адреналин и экспериментируйте с различными стратегиями – все для вашей победы!
Marianep · August 11, 2023 at 1:30 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печати для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Lamontgot · August 11, 2023 at 2:16 am
pokerdom вход
https://zakladok.net/user.php?expand=&folder=218&id=73%20<a%20href=
ПокерДом Казино: Игра на Реальные Деньги и Лицензионные АвтоматыТак что, если вы ищете надежное онлайн-казино с огромным выбором игр на реальные деньги, прозрачными условиями и бонусами, то ПокерДом Казино — ваш идеальный выбор. Скачайте приложение на свой ПК и окунитесь в захватывающий мир азарта и удачи прямо сейчас. Приключения ждут!
JohnTXcef · August 11, 2023 at 2:30 am
самые надежные онлайн казино
https://www.ancb.bj/index.php/association-2/oueme/avrankou.html?start=550
В поисках оптимального рейтинга онлайн казино для игры на реальные деньги, обращайте внимание на щедрые бонусы и приветственные пакеты, которые подарят вам дополнительные возможности для победы. Некоторые заведения могут предложить уникальные акции, которые выделяются среди остальных и позволяют получить максимальную отдачу от каждой ставки.Перед тем, как взяться за путешествие в мир азартных волнений, обязательно пройдите по пути просмотра рейтинга онлайн казино, созданного настоящими гуру азартной индустрии. Используя только проверенные и актуальные данные, рейтинг поможет определиться с выбором и выбрать самые выгодные предложения от проверенных операторов.
JohnTXcef · August 11, 2023 at 2:41 am
top casino
https://mygpaspace.webs.com/apps/blog/show/13325467-the-passionate-man
Виртуальное игорное пространство насыщено различными игровыми платформами, предлагающими уникальные игры на реальные деньги, начиная от классических слотов до более сложных игровых вариаций. Рейтинг онлайн казино для игры на реальные деньги акцентирует внимание на разнообразии представленных игр, чтобы удовлетворить вкусы самых взыскательных игроков.Что делает казино на реальные деньги особенно привлекательными? Это, конечно же, щедрые бонусы и акции. Наш ТОП казино обязательно порадует вас фриспинами, бездепозитными бонусами и приветственными пакетами. Удача смеется над теми, кто не использует подарки от казино.
child porn · August 11, 2023 at 3:20 am
Wow, this piece of writing is nice, my younger sister is analyzing these
things, therefore I am going to tell her.
Binance fee · August 11, 2023 at 3:27 am
Hello there! This is mmy first comkment here so I just wanted to
give a quick shout out and say I genuinely enjoy reading your articles.
Can you recommend anny other blogs/websites/forums that cover the same topics?
Appreciate it!
My web-site Binance fee
ThomasKNcef · August 11, 2023 at 3:59 am
игры казино на реальные деньги
http://rumodelism.com/phorum/viewtopic.php?t=1132
ТОП Лучших: Рейтинг Онлайн Казино 2023 для Игры на Реальные Деньги”Казино Лунного Сияния” – Путь к Вершине
Charlesfogue · August 11, 2023 at 4:00 am
canadian drug prices canadian pharmacy service
Marianep · August 11, 2023 at 4:02 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать стоимость для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Lamontgot · August 11, 2023 at 4:13 am
покердом онлайн
https://binmarket.site/itm/a-set-of-cards-on-the-system-of-mao-200-250-characters/764610
Так что, если вы ищете надежное онлайн-казино с огромным выбором игр на реальные деньги, прозрачными условиями и бонусами, то ПокерДом Казино — ваш идеальный выбор. Скачайте приложение на свой ПК и окунитесь в захватывающий мир азарта и удачи прямо сейчас. Приключения ждут!Казино ПокерДом славится своими щедрыми бонусами и акциями. Мы ценим каждого игрока и готовы вознаградить вас за ваш выбор. С момента регистрации вы становитесь участником программы лояльности, которая открывает доступ к эксклюзивным бонусам, фриспинам и участию в турнирах с гарантированными призами.
vivod_rhymn · August 11, 2023 at 5:12 am
вывод из запоя домодедово https://vivod-zapoya-domodedovo.ru/
ThomasKNcef · August 11, 2023 at 5:38 am
лучшие казино онлайн россии
http://forum.webmvc.com/index.php?/topic/87966-%D0%BF%D0%BE%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%83%D0%B9%D1%82%D0%B5-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D1%81-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%BC-%D0%B1%D0%BE%D0%BD%D1%83%D1%81%D0%BE%D0%BC/
Добро пожаловать в увлекательный мир онлайн казино 2023, где реальные деньги ждут своего победителя! Если вы настоящий азартный игрок и ищете надежное заведение для волнующих игр на деньги, то наш ТОП лучших казино точно то, что вам нужно.Если вы устали от земных казино и готовы отправиться в космос, то “Галактическое Казино X” создано именно для вас. Космические приключения в сочетании с огромными бонусами и высоким процентом выплат сделают вашу игру незабываемой.
JeffreyAlone · August 11, 2023 at 5:43 am
pokerdom
https://www.mdou29lip.ru/index.php?id=994
Играйте в слоты на реальные деньги на PokerDom Casino и позвольте себе почувствовать вкус победы. Скачайте клиент на ПК и погрузитесь в мир азарта, где каждый спин барабанов — это возможность сделать следующий шаг к большому выигрышу. Покердом Казино — ваш путь к богатству и невероятным азартным приключениям.Играть онлайн в слоты на реальные деньги — это как воплотить свои мечты в жизнь, вращая барабаны автоматов и ощущая, как каждый спин приносит вам ближе к большому выигрышу. PokerDom Casino предоставляет вам этот шанс, даря незабываемые моменты азарта и нереальных эмоций.
cialis · August 11, 2023 at 5:56 am
online pharmacies india top 10 online pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
LarryraW · August 11, 2023 at 6:07 am
amoxicillin capsule 500mg price: [url=http://amoxicillins.com/#]amoxicillin cephalexin[/url] medicine amoxicillin 500mg
Marianep · August 11, 2023 at 6:36 am
Благодаря 3d печать дешево , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
ThomasKNcef · August 11, 2023 at 7:15 am
топ лучших онлайн казино
http://maemo.su/forum/viewtopic.php?pid=137786
В наше время онлайн казино стали настоящим явлением в мире азартных развлечений. Рейтинг онлайн казино стабильно растет, привлекая все больше игроков, и это не удивительно. Ведь они предлагают уникальную возможность испытать драйв и азарт, не выходя из дома. Неважно, хотите ли вы испытать удачу в покере, рулетке, блэкджеке или игровых автоматах, наш ТОП лучших онлайн казино поможет вам сделать правильный выбор.”Империя Сокровищ” – Оазис Сокровищ
JamesClura · August 11, 2023 at 7:23 am
reduslim pillole dimagranti
JeffreyAlone · August 11, 2023 at 7:35 am
скачать клиент покердом
https://voronezh.yp.ru/detail/id/nika_i_mitya_detskii_razvivayuschii_tsentr_3461667/
Скачать клиент на ПК — это как ступить на порог волшебного мира, где казино не просто забава, а стиль жизни. Покердом Казино — это место, где каждый гость становится главным героем своей истории азартных побед. Лицензионные автоматы, расставленные на страницах PokerDom Casino, как крошечные сказочные порталы в мир богатства.Клиент на ПК от PokerDom Casino ? это ваш билет в азартное путешествие без границ. Он откроет перед вами мир лицензионных автоматов, каждый из которых как отдельная история о выигрыше. Скачать приложение ? значит войти в мир, где каждая ставка ? это шанс на увлекательное путешествие к сокровищам азарта.
Peterautor · August 11, 2023 at 7:46 am
Демонтаж стен Москва
Демонтаж стен Москва
Edwardwap · August 11, 2023 at 7:52 am
https://t.me/gaz_gold24
Brenthat · August 11, 2023 at 8:37 am
ed medication: mens erection pills – ed drug prices
ThomasKNcef · August 11, 2023 at 8:44 am
топ 10 онлайн казино россии
http://center-2.ru/forum/?mingleforumaction=viewtopic&t=5245.0
Погрузитесь в мир азарта и больших выигрышей вместе с нашим ТОПом лучших онлайн казино на 2023 год. Не упустите шанс испытать удачу и заработать реальные деньги в одном из самых захватывающих развлечений современности. Удачи вам и пусть фортуна всегда будет на вашей стороне!Итак, выберите свою удачу, включите игральный режим и отправляйтесь в азартное путешествие по миру онлайн гемблинга. Рейтинг онлайн казино 2023 для игры на реальные деньги ждет вас! Не упустите шанс стать победителем и исполнить заветные мечты!
ThomasKNcef · August 11, 2023 at 8:56 am
онлайн казино
https://partnerkin.com/forum/9/pin_kody_stargame
В мире онлайн гемблинга неустанно процветают казино, приглашающие азартных игроков попробовать свою удачу и насладиться захватывающими играми на реальные деньги. Разнообразие интернет-казино удивительно, и с каждым годом появляются новые заведения, стремящиеся привлечь внимание опытных азартных игроков и неопытных новичков.Заброшенный оазис в пустыне казино-вулкан “Империя Сокровищ” готов раскрыть свои сокровищницы только достойным исследователям удачи. Готовы ли вы стать настоящим сокровищеискателем и разыскать бесценные драгоценности?
Marianep · August 11, 2023 at 9:13 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать гипсополимер для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
JeffreyAlone · August 11, 2023 at 9:17 am
покердом скачать клиент на пк
http://wi-ki.ru/wiki/%D0%9A%D0%B0%D0%BD%D0%BA%D1%80%D0%B8%D0%BD,_%D0%95%D0%B3%D0%BE%D1%80_%D0%A4%D1%80%D0%B0%D0%BD%D1%86%D0%B5%D0%B2%D0%B8%D1%87
Скачать клиент на ПК ? это, как взять путевку в мир бесконечных возможностей. PokerDom Casino дает вам инструмент для погружения в азартную гармонию, где каждый аккорд — это новый выигрыш. Наши лицензионные автоматы — это как чарующая мелодия, которая обещает вам не только удовольствие, но и финансовые перспективы.Играйте в слоты на реальные деньги на PokerDom Casino и позвольте себе почувствовать вкус победы. Скачайте клиент на ПК и погрузитесь в мир азарта, где каждый спин барабанов — это возможность сделать следующий шаг к большому выигрышу. Покердом Казино — ваш путь к богатству и невероятным азартным приключениям.
VPRichardcef · August 11, 2023 at 10:14 am
казино gama онлайн
https://www.walkscore.com/people/194583491073/walk-score-user
Gama Casino – это не просто место для игр, это настоящее игровое творчество. Официальный вход на сайт откроет перед вами мир, где каждый спин, каждая ставка – это часть грандиозной игры, где вы – главный режиссер. Гама Казино дарит вам кисти, а вы создаете свой азартный шедевр.Казино Гама радует глаз разнообразием игровых автоматов, словно множество драгоценных камней, сверкающих на алтаре азартных мечтаний. Здесь вы найдете слоты на любой вкус и настроение – от увлекательных приключений до атмосферы старинных игорных домов.
JeffreyAlone · August 11, 2023 at 10:55 am
покердом вход
https://www.centre-britannia.com/2014-april–voronezh
Что делает PokerDom Casino таким уникальным? Это не только лицензионные автоматы и море разнообразных игр. Это страсть, азарт, которые связывают вас с этим официальным сайтом. В этом Покердом Казино каждая игра ? это как шаг в мир больших возможностей, каждый клик ? это путь к азартным победам.Играть онлайн в слоты на реальные деньги — это как воплотить свои мечты в жизнь, вращая барабаны автоматов и ощущая, как каждый спин приносит вам ближе к большому выигрышу. PokerDom Casino предоставляет вам этот шанс, даря незабываемые моменты азарта и нереальных эмоций.
JeffreyAlone · August 11, 2023 at 11:08 am
pokerdom официальный сайт
https://x-pdf.ru/issledovatelskaya-rabota-po-teme-toponimika-rodnogo-kraya/
Играть онлайн в слоты на реальные деньги — это как воплотить свои мечты в жизнь, вращая барабаны автоматов и ощущая, как каждый спин приносит вам ближе к большому выигрышу. PokerDom Casino предоставляет вам этот шанс, даря незабываемые моменты азарта и нереальных эмоций.Скачать клиент на ПК ? это как взять с собой кусочек казино, где бы вы ни находились. Играйте, наслаждайтесь и пусть каждый спин барабанов будет вашим личным приключением. Покердом Казино приглашает вас в мир, где вы становитесь героем своей собственной истории выигрышей.
tadalafil for sale · August 11, 2023 at 11:09 am
online canadian pharmacy with prescription canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
ทางเข้าufabet7777 · August 11, 2023 at 11:11 am
I know this if off topic but I’m looking into starting my own blog
and was curious what all is needed to get setup?
I’m assuming having a blog like yours would cost a pretty penny?
I’m not very internet savvy so I’m not 100% certain. Any recommendations or
advice would be greatly appreciated. Thanks
Marianep · August 11, 2023 at 11:50 am
Благодаря 3d принтер печать металлом , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
VPRichardcef · August 11, 2023 at 11:51 am
gama casino онлайн
https://fliphtml5.com/homepage/mujsm
Gama Casino – это не просто платформа для онлайн развлечений, это целый игровой континент, населенный бескрайней палитрой азартных эмоций. Шагните на его территорию через официальный вход и вы обретете доступ к невиданным ранее гейминговым возможностям.Игровые автоматы в России нашли свой дом в Gama Casino. Это место, где прошлое азартных развлечений переплетается с инновациями современности. Ведь наша цель – не только дарить эмоции, но и создавать новые главы в истории азартной индустрии.
JamesClura · August 11, 2023 at 11:53 am
reduslim si trova in farmacia prezzo
Scottcaf · August 11, 2023 at 11:56 am
cheap erectile dysfunction pills online: ed treatments – erection pills viagra online
ClaudeApets · August 11, 2023 at 12:06 pm
amoxicillin buy online canada where can i buy amoxicillin over the counter – amoxacillian without a percription
HectorMak · August 11, 2023 at 12:31 pm
Regards. I value this.
reliable essay writing service essay writing meme barclays additions plus will writing service
DonaldDoota · August 11, 2023 at 12:35 pm
покердом игры
https://traditio.wiki/Serebro
PokerDom Casino предоставляет доступ к самым лучшим и лицензионным слотам в мире азарта. Выбор у нас настолько разнообразен, что здесь каждый найдет своего любимого автомата. От классических фруктовых симуляторов до передовых 3D-слотов ? наше казино дарит вам шанс испытать удачу на игровых автоматах, которые вы точно не найдете в других местах.Наша команда сделает все возможное, чтобы ваше время проведенное в PokerDom Casino было незабываемым. Мы ценим каждого игрока и гарантируем конфиденциальность и безопасность ваших данных. Наша служба поддержки всегда готова прийти вам на помощь и ответить на все вопросы.
boob · August 11, 2023 at 1:19 pm
Nicce post. I leɑrn sometһing new and chɑllenging оn sites I stumЬleupon every day.
Іt’s always uѕeful too read articles from other ԝriters
and practice something from their sites.
VPRichardcef · August 11, 2023 at 1:28 pm
казино gama онлайн
https://www.blogtalkradio.com/azetara12
Gama Casino — ваш выбор №1Добро пожаловать в виртуальный рай азартных развлечений – Gama Casino! Если вы искали вход на официальный сайт, чтобы насладиться захватывающей атмосферой онлайн казино на русском языке, то вы пришли по адресу. Гама Казино – это не просто игровая платформа, это настоящий портал в мир азарта, где сбываются мечты и рождаются новые легенды.
best price tadalafil · August 11, 2023 at 1:32 pm
pharmacy canadian order prescription medicine online Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Johndup · August 11, 2023 at 2:12 pm
Discover the fantastic world of [url=https://nicotine-pouches.online/nicotine-pouches/]Nicotine Pouches UK[/url] and enjoy a unique blend of satisfaction!
DonaldDoota · August 11, 2023 at 2:24 pm
pokerdom вход
https://pl.wikipedia.org/wiki/Lapis_Trubieckoj
Кстати, PokerDom Casino заботится о своих игроках и предлагает щедрую бонусную программу. Новичкам доступны привлекательные приветственные бонусы, а постоянные посетители порадуются регулярными акциями и подарками. Это доказательство того, что здесь ценят и уважают каждого игрока.Не упустите возможность стать частью PokerDom Casino — мира, где страсть к азарту встречается с высокими стандартами безопасности и надежности. Скачайте клиент на ПК и отправьтесь в захватывающее путешествие, где каждый спин барабанов может изменить вашу жизнь. Ведь PokerDom Casino — это не только игра, это стиль жизни, где вы — хозяин своей удачи.
incevacof · August 11, 2023 at 2:36 pm
Студия интерьеров Мята в Киргизии https://studio-mint.com.kg/это профессиональный, уникальный, неповторимый и индивидуальный дизайн интерьеров квартир, домов, коттеджей, коммерческих помещений, а также услуги по проектированию, подбору и закупке материалов, изготовлению мебели на заказ. На сайте вы сможете узнать стоимость дизайн проекта, а также задать интересующие вас вопросы.
VPRichardcef · August 11, 2023 at 2:58 pm
казино gama online
https://www.walkscore.com/people/194583491073/walk-score-user
Загляните в Гама Казино и вы окунетесь в потрясающий мир азартных возможностей. Ваш вход на официальный сайт станет ключом к миру, где каждая ставка – это взлет к новым высотам азартного восторга. Gama Casino приглашает вас на рулетку судьбы, где вы – пилот своей игровой доли.Gama Casino — это не просто онлайн казино на русском языке, это настоящий калейдоскоп азартных возможностей. Ваша виртуальная площадка для неограниченных развлечений в мире азартных игр. Гама Казино приглашает вас окунуться в море эмоций и прилива адреналина!
VPRichardcef · August 11, 2023 at 3:09 pm
казино gama
http://cs-online.ru/forum/index.php?showtopic=13236&mode=linearplus
Gama Casino — ваш выбор №1Gama Casino — это не просто онлайн казино на русском языке, это настоящий калейдоскоп азартных возможностей. Ваша виртуальная площадка для неограниченных развлечений в мире азартных игр. Гама Казино приглашает вас окунуться в море эмоций и прилива адреналина!
CharlesKes · August 11, 2023 at 3:10 pm
Some trends of drugs.
cheap erectile dysfunction pills online: the best ed pill – mens ed pills
Drug information.
cialis cost · August 11, 2023 at 3:28 pm
pharmacy canadian canadian mail order pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
DonaldDoota · August 11, 2023 at 4:07 pm
покердом
https://pl.wikipedia.org/wiki/Lapis_Trubieckoj
А чтобы быть в курсе всех новостей и акций, не забудьте подписаться на рассылку PokerDom Casino. Это отличный способ быть вовремя в курсе последних обновлений и не упустить ни одной выгодной возможности.Так что, если вы ищете место, где можно скачать и играть онлайн в слоты на реальные деньги, не задумываясь выбирайте PokerDom Casino. Мы ? дом азарта, где удача становится вашей союзницей, а выходные превращаются в настоящий праздник азарта и веселья!
Samuelfet · August 11, 2023 at 4:46 pm
https://pharmacyreview.best/# certified canadian international pharmacy
Marianep · August 11, 2023 at 5:04 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать титаном в минске для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
zapoy_viess · August 11, 2023 at 5:06 pm
вывод из запоя на дому балашиха https://vivod-zapoya-balashiha.ru/
cialis coupons · August 11, 2023 at 5:16 pm
approved canadian pharmacies pharmacy canadian Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesClura · August 11, 2023 at 5:24 pm
integratore per la perdita di peso Reduslim
DonaldDoota · August 11, 2023 at 5:46 pm
скачать покердом на компьютер с официального сайта
https://www.jumper.ru/a18041.html
Наша команда сделает все возможное, чтобы ваше время проведенное в PokerDom Casino было незабываемым. Мы ценим каждого игрока и гарантируем конфиденциальность и безопасность ваших данных. Наша служба поддержки всегда готова прийти вам на помощь и ответить на все вопросы.Одним из главных преимуществ PokerDom Casino является наше уникальное клиентское приложение для ПК. Забудьте о необходимости постоянно заходить на сайт ? установив клиент PokerDom на свой компьютер, вы всегда будете на шаг впереди и готовы к игре в любое время. Удобный интерфейс, быстрая загрузка, исключительная производительность ? все это делает наше приложение для ПК непревзойденным в своем роде.
DonaldDoota · August 11, 2023 at 5:58 pm
покердом скачать
https://nzt.eth.link/wiki/Oxana_Fedorova.html
Одним из главных преимуществ PokerDom Casino является наше уникальное клиентское приложение для ПК. Забудьте о необходимости постоянно заходить на сайт ? установив клиент PokerDom на свой компьютер, вы всегда будете на шаг впереди и готовы к игре в любое время. Удобный интерфейс, быстрая загрузка, исключительная производительность ? все это делает наше приложение для ПК непревзойденным в своем роде.Каждый, кто ценит качество и разнообразие, останется доволен в PokerDom Casino. Здесь представлены только лицензионные автоматы от ведущих разработчиков игрового софта. Разнообразие слотов ошеломляет: от классических фруктовых машин до современных видео слотов с уникальными сюжетами и захватывающими бонусными раундами.
Jamesdup · August 11, 2023 at 6:38 pm
Step into a world of authentic taste and satisfaction with [url=https://nicotine-pouches.online/nicotine-pouches/brands/]haypp nicotine pouches[/url]. Experience it today!
cialis price · August 11, 2023 at 7:08 pm
online pharmacy without a prescription canadian drugs without prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Darylplany · August 11, 2023 at 7:18 pm
how to buy amoxycillin: https://amoxicillins.com/# buy amoxicillin
sg · August 11, 2023 at 7:34 pm
Hey! I could have sworn I’ve been to this site before
but after browsing through some of the post
I realized it’s new to me. Anyways, I’m definitely glad I found it and I’ll be book-marking and checking back frequently!
Marianep · August 11, 2023 at 7:40 pm
Благодаря 3d печать из металла , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
раскрутка сайта в гугле · August 11, 2023 at 7:42 pm
I am really loving the theme/design of your web site. Do you ever run into any internet browser compatibility problems? A number of my blog audience have complained about my blog not operating correctly in Explorer but looks great in Opera. Do you have any solutions to help fix this issue?
ikolaebep · August 11, 2023 at 8:17 pm
На сайте https://matrasmd.com приобретите практичные, надежные матрасы безупречного качества и созданные в соответствии с самыми высокими требованиями. Все изделия отвечают предпочтениям потребителей. С такими постельными принадлежностями ваш сон будет крепким и сладким. К важным преимуществам матрасов относят то, что они в меру мягкие, наделены высоким качеством, прослужат долгое время без потери эксплуатационных характеристик. Сделайте заказ в магазине, который дорожит своими клиентами и предлагает широкий ассортимент.
Edwardwap · August 11, 2023 at 8:27 pm
веселящий газ купить
strahov_viess · August 11, 2023 at 8:46 pm
https://vzr-strahovka.ru/vidy-polisov/
cialis online · August 11, 2023 at 8:55 pm
prescription prices canadian meds canadian mail order pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JamesClura · August 11, 2023 at 9:40 pm
reduslim in farmacia
Marianep · August 11, 2023 at 10:14 pm
Благодаря 3d печать зубов , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
booby · August 11, 2023 at 10:27 pm
Tһanks for yoսr personal marvelous posting! I genuinely enjoyed reading it, you hapⲣen to be a gresat author.
I will maқe sure to bookmark your blog and will
eventually come back later in life. Ι want too encourage one to continue your
great job, have a nice morning!
20mg cialis buy · August 11, 2023 at 10:40 pm
pharmacy canadian canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
sadounik.ru · August 11, 2023 at 11:25 pm
I do believe all the ideas you have presented for your post. They are very convincing and will definitely work. Still, the posts are too quick for novices. May just you please prolong them a bit from next time? Thank you for the post.
Marianep · August 12, 2023 at 12:41 am
Благодаря 3d печать металлом цена , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
tadalafil coupons · August 12, 2023 at 1:11 am
discount online canadian pharmacy buy prescription drugs canada Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
tires on wheels · August 12, 2023 at 1:17 am
Hi, its fastidious post regarding media print, we all know
media is a fantastic source of information.
Also visit my homepage … tires on wheels
etrovtrolo · August 12, 2023 at 2:05 am
Строительная компания Премиум https://premium-sk.ru/ в Екатеринбурге – это ремонт квартир, домов, коттеджей, коммерческих помещений, а так же строительство под ключ. Многолетний опыт работы позволит получить только качественные услуги. Узнать стоимость ремонта за 1 минуту можно на сайте выбрав тип помещения, а заказать проектирование и строительство коттеджей от профессионалов очень доступно.
HectorMak · August 12, 2023 at 3:28 am
Regards. A lot of data!
essay writing service mba are essay writing services any good will writing service derby
Jamesdup · August 12, 2023 at 4:50 am
Discover a remarkable sensation with our [url=https://velo1.live/]velo snus uk[/url] variety. Don’t miss out!
LarryraW · August 12, 2023 at 5:02 am
[url=https://pharmacyreview.best/#]my canadian pharmacy[/url] canadian pharmacies comparison
Marianep · August 12, 2023 at 5:43 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать дешево для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Davidmes · August 12, 2023 at 5:45 am
покурить кальян
Daviddup · August 12, 2023 at 6:14 am
Experience the exceptional [url=https://velo1.live/]nicotine pouch brands[/url] sensation with our diverse flavor assortment!
8 tips for writing a winning resume · August 12, 2023 at 6:41 am
you are in point of fact a good webmaster. The web site loading velocity is incredible.
It seems that you are doing any distinctive trick. Furthermore, The contents are masterwork.
you have performed a great process in this topic!
JamesTrill · August 12, 2023 at 7:41 am
where to get mobic pill [url=https://mobic.store/#]where to get generic mobic pills[/url] cost mobic no prescription
competitive rates · August 12, 2023 at 7:59 am
A person necessarily assist to make seriously articles I’d state.
This is the very first time I frequented your website page and
to this point? I surprised with the research you made to create this particular submit amazing.
Great task!
Visit my blog post … competitive rates
Michaelpiorm · August 12, 2023 at 8:10 am
https://drgninfo.ru/
Marianep · August 12, 2023 at 8:16 am
Благодаря 3d печать на металле , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
cialis cost · August 12, 2023 at 8:28 am
canadian mail order pharmacy canadian pharmaceuticals online safe Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Johndup · August 12, 2023 at 8:45 am
Dive into a world of flavor with the top [url=https://nicotine-pouches.online/brands/]nicotine pouch brands[/url]! Uncover an exquisite variety for an unparalleled experience.
Peterautor · August 12, 2023 at 9:06 am
Демонтаж стен Москва
Демонтаж стен Москва
Peterautor · August 12, 2023 at 9:07 am
Демонтаж стен Москва
Демонтаж стен Москва
Peterautor · August 12, 2023 at 9:08 am
Демонтаж стен Москва
Демонтаж стен Москва
Scottcaf · August 12, 2023 at 9:45 am
cures for ed: best erection pills – cheap erectile dysfunction pill
Michaelpiorm · August 12, 2023 at 10:04 am
https://sssline.ru/
ClaudeApets · August 12, 2023 at 10:06 am
canadian drugs my canadian pharmacy
Viagra 100 Mg Price · August 12, 2023 at 10:21 am
viagra online canadian pharmacy online canadian pharmacy with prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Marianep · August 12, 2023 at 10:48 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
allparts_Nuh · August 12, 2023 at 11:39 am
https://allparts.me
Viagra Online Uk · August 12, 2023 at 12:26 pm
viagra online canadian pharmacy canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Jamesp · August 12, 2023 at 1:07 pm
Discover the refreshing taste and unmatched sensation of [url=https://velo1.live/]velo nicopods[/url] with our diverse range of options!
Marianep · August 12, 2023 at 1:23 pm
Благодаря 3d печать капролоном , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
JosephApego · August 12, 2023 at 2:15 pm
Прогон Xrumer
David#randcode[Loremipsumdolor,2,6] · August 12, 2023 at 2:30 pm
Experience the unparalleled sensation of [url=https://nicotine-pouches.store/en/buy-snus-nicotine-pouches/]buy snus online eu[/url] with our exquisite range of products!
20mg tadalafil buy · August 12, 2023 at 2:32 pm
approved canadian pharmacies pharmacy review Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
CBD · August 12, 2023 at 2:40 pm
What’s up to all, how is all, I think every one is
getting more from this site, and your views are
fastidious in support of new users.
오슬로안마 · August 12, 2023 at 3:18 pm
These are actually wonderful ideas in on the topic of blogging.
You have touched some pleasant points here. Any way keep up wrinting.
ilachkZek · August 12, 2023 at 3:56 pm
На сайте https://aviator-2021.ru/ вы сможете сыграть в увлекательную и интересную игру «Авиатор» нового поколения. На сайте вы узнаете о том, как правильно ее взломать и получить за это приличные средства. Это многопользовательская краш-игра, которая захватывает воображение и дарит удивительные ощущения. И все это благодаря продуманным эффектам и непредсказуемому сюжету. Вы получите огромное количество ярких и незабываемых впечатлений, которые точно никогда не забудутся. Для активации программы взлома необходимо просто пройти регистрацию, после чего внести на счет 700 рублей.
Angelvor · August 12, 2023 at 4:19 pm
2023年世界盃籃球賽
2023年世界盃籃球賽(英語:2023 FIBA Basketball World Cup)為第19屆FIBA男子世界盃籃球賽,此是2019年實施新制度後的第2屆賽事,本屆賽事起亦調整回4年週期舉辦。本屆賽事歐洲、美洲各洲最好成績前2名球隊,亞洲、大洋洲、非洲各洲的最好成績球隊及2024年夏季奧林匹克運動會主辦國法國(共8隊)將獲得在巴黎舉行的奧運會比賽資格[1][2]。
申辦過程
2023年世界盃籃球賽提出申辦的11個國家與地區是:阿根廷、澳洲、德國、香港、以色列、日本、菲律賓、波蘭、俄羅斯、塞爾維亞以及土耳其[3]。2017年8月31日是2023年國際籃總世界盃籃球賽提交申辦資料的截止日期,俄羅斯、土耳其分別遞交了單獨舉辦世界盃的申請,阿根廷/烏拉圭和印尼/日本/菲律賓則提出了聯合申辦[4]。2017年12月9日國際籃總中心委員會根據申辦情況做出投票,菲律賓、日本、印度尼西亞獲得了2023年世界盃籃球賽的聯合舉辦權[5]。
比賽場館
本次賽事共將會在5個場館舉行。馬尼拉將進行四組預賽,兩組十六強賽事以及八強之後所有的賽事。另外,沖繩市與雅加達各舉辦兩組預賽及一組十六強賽事。
菲律賓此次將有四個場館作為世界盃比賽場地,帕賽市的亞洲購物中心體育館,奎松市的阿拉內塔體育館,帕西格的菲爾體育館以及武加偉的菲律賓體育館。亞洲購物中心體育館曾舉辦過2013年亞洲籃球錦標賽及2016奧運資格賽。阿拉內塔體育館主辦過1978年男籃世錦賽。菲爾體育館舉辦過2011年亞洲籃球俱樂部冠軍盃。菲律賓體育館約有55,000個座位,此場館也將會是本屆賽事的決賽場地,同時也曾經是2019年東南亞運動會開幕式場地。
日本與印尼各有一個場地舉辦世界盃賽事。沖繩市綜合運動場約有10,000個座位,同時也會是B聯賽琉球黃金國王的新主場。雅加達史納延紀念體育館為了2018年亞洲運動會重新翻新,是2018年亞洲運動會籃球及羽毛球的比賽場地。
17至32名排名賽
預賽成績併入17至32名排位賽計算,且同組晉級複賽球隊對戰成績依舊列入計算
此階段不再另行舉辦17-24名、25-32名排位賽。各組第1名將排入第17至20名,第2名排入第21至24名,第3名排入第25至28名,第4名排入第29至32名
複賽
預賽成績併入16強複賽計算,且同組遭淘汰球隊對戰成績依舊列入計算
此階段各組第三、四名不再另行舉辦9-16名排位賽。各組第3名將排入第9至12名,第4名排入第13至16名
JosephApego · August 12, 2023 at 4:30 pm
Прогон хрумером
cialis usa · August 12, 2023 at 4:37 pm
canadian pharmaceuticals online canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
James#randcode[Aloremipsumdolor,2,5] · August 12, 2023 at 4:43 pm
Discover the superior sensations of [url=https://nicotine-pouches.store/gb/en/store-locator/]nicotine store[/url] with our top-notch selection!
news_Nuh · August 12, 2023 at 5:06 pm
новости Сум
2bong · August 12, 2023 at 5:20 pm
Hello there! This post couldn’t be written any better! Reading through this post
reminds me of my previous room mate! He always kept chatting about this.
I will forward this post to him. Pretty sure he will have a good read.
Many thanks for sharing!
HectorMak · August 12, 2023 at 6:33 pm
Appreciate it, Ample content!
will writing service graduate school essay writing service writing a history essay
cialis 10 mg · August 12, 2023 at 6:50 pm
top 10 online pharmacies canada online pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Charlesfogue · August 12, 2023 at 7:48 pm
ed remedies: ed pills that really work – pills for ed
buy cialis · August 12, 2023 at 8:42 pm
discount online canadian pharmacy viagra online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
VPRichardcef · August 12, 2023 at 8:58 pm
gama casino официальный сайт
https://globalseoarticles.com/let-google-notice-your-website/
Gama Casino: Яркий Блик АзартаИгровые автоматы в России: Очарование азарта
1998 integra · August 12, 2023 at 9:14 pm
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or
something. I think that you can do with some pics to drive the message
home a little bit, but instead of that,
this is great blog. A fantastic read. I’ll definitely be back.
Visit my page … 1998 integra
ChrisDed · August 12, 2023 at 9:24 pm
Замена венцов деревянного дома обеспечивает стабильность и долговечность конструкции. Этот процесс включает замену поврежденных или изношенных верхних балок, гарантируя надежность жилища на долгие годы. подъем дома
VPRichardcef · August 12, 2023 at 10:35 pm
сайт gama casino
http://kappara.ru/blog/?p=14039%20https://webranksdirectory.com/website-list-1365/%20https://trustburn.com/categories/law-practice/RU
Не упустите свой шанс сделать жизнь ярче и насыщеннее с Gama Casino. Вход на официальный сайт – это ваш билет в мир возможностей и волнения. Гама Казино приглашает вас на увлекательное путешествие по миру азарта и невероятных эмоций. Подготовьтесь к захватывающему опыту, который оставит след в вашем сердце навсегда!Загляните в Гама Казино и вы окунетесь в потрясающий мир азартных возможностей. Ваш вход на официальный сайт станет ключом к миру, где каждая ставка – это взлет к новым высотам азартного восторга. Gama Casino приглашает вас на рулетку судьбы, где вы – пилот своей игровой доли.
tadalafil online · August 12, 2023 at 11:27 pm
canada online pharmacies canadian pharmacies price Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Marianep · August 12, 2023 at 11:57 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать sla для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
VPRichardcef · August 13, 2023 at 12:12 am
gama casino официальный сайт
http://web-lance.net/forums.php?m=posts&q=19707
Добро пожаловать в захватывающее путешествие сквозь виртуальные аллеи азартного мира – Gama Casino! Если вы ищете вход на официальный сайт, чтобы ощутить на себе влекущий вихрь азарта, то Гама Казино готово приветствовать вас в своем виртуальном азартном крае.Добро пожаловать в виртуальный рай азартных развлечений – Gama Casino! Если вы искали вход на официальный сайт, чтобы насладиться захватывающей атмосферой онлайн казино на русском языке, то вы пришли по адресу. Гама Казино – это не просто игровая платформа, это настоящий портал в мир азарта, где сбываются мечты и рождаются новые легенды.
Viagra 100 Mg · August 13, 2023 at 1:11 am
canadian pharmacy 2023 pharmacy without dr prescriptions Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
eyjeknef · August 13, 2023 at 1:24 am
На сайте Microchips https://microchips.by/ вы сможете ознакомиться с большим каталогом батареек, аккумуляторов, источников питания, фонарей и заказать их. На все действуют оптовые цены, а также доставка по Минску и всей Беларуси. Всегда в наличии. Весь товар сертифицирован, а работа напрямую с производителями позволяет предложить лучшую цену на продукцию.
CharlesKes · August 13, 2023 at 1:29 am
Read now.
buying generic propecia online buying cheap propecia price
drug information and news for professionals and consumers.
VPRichardcef · August 13, 2023 at 1:42 am
gama casino играть
https://issuu.com/aaaxno1
Gama Casino: Яркий Блик АзартаИграть бесплатно в онлайн казино стало еще проще с Gama Casino. Наше заведение открыто для истинных ценителей азартных игр и предлагает вам уникальный опыт, полный невероятных призов и незабываемых моментов. Гама Казино заботится о каждом игроке, предоставляя беспрецедентные возможности для всех, кто стремится испытать волнение азарта в полной мере.
Brenthat · August 13, 2023 at 1:48 am
the canadian pharmacy online canadian pharmacy
VPRichardcef · August 13, 2023 at 1:53 am
gama casino играть бесплатно
https://sitebs.ru/blogs/89277.html
Gama Casino – это не просто место для игр, это настоящее игровое творчество. Официальный вход на сайт откроет перед вами мир, где каждый спин, каждая ставка – это часть грандиозной игры, где вы – главный режиссер. Гама Казино дарит вам кисти, а вы создаете свой азартный шедевр.Играть бесплатно в онлайн казино стало еще проще с Gama Casino. Наше заведение открыто для истинных ценителей азартных игр и предлагает вам уникальный опыт, полный невероятных призов и незабываемых моментов. Гама Казино заботится о каждом игроке, предоставляя беспрецедентные возможности для всех, кто стремится испытать волнение азарта в полной мере.
Marianep · August 13, 2023 at 2:22 am
Благодаря 3d печать фотополимер , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
VPRichardcef · August 13, 2023 at 3:10 am
gama casino онлайн
https://honda-fit.ru/forums/index.php?autocom=gallery&req=si&img=4388
Gama Casino: Яркий Блик АзартаИграть бесплатно в онлайн казино стало еще проще с Gama Casino. Наше заведение открыто для истинных ценителей азартных игр и предлагает вам уникальный опыт, полный невероятных призов и незабываемых моментов. Гама Казино заботится о каждом игроке, предоставляя беспрецедентные возможности для всех, кто стремится испытать волнение азарта в полной мере.
Darylplany · August 13, 2023 at 3:19 am
amoxicillin 500mg buy online uk: https://amoxicillins.com/# amoxicillin online pharmacy
Nicolas · August 13, 2023 at 3:23 am
Hi there, I enjoy reading all of your post. I like to write a little comment to support you.
Feel free to surf to my web site; http://cevhergmbh.com/__media__/js/netsoltrademark.php?d=ww17.Shopaccpoke.com%2F__media__%2Fjs%2Fnetsoltrademark.php%3Fd%3DHouseofenki.com%252Fcollections%252Ftraditional-showers
LarryraW · August 13, 2023 at 4:07 am
[url=https://pharmacyreview.best/#]my canadian pharmacy[/url] canadian family pharmacy
Marianep · August 13, 2023 at 4:47 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать flex для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
VPRichardcef · August 13, 2023 at 4:48 am
казино gama вход
http://world-guidebook.blogspot.com/2010/01/blog-post_4176.html
Добро пожаловать в виртуальный рай азартных развлечений – Gama Casino! Если вы искали вход на официальный сайт, чтобы насладиться захватывающей атмосферой онлайн казино на русском языке, то вы пришли по адресу. Гама Казино – это не просто игровая платформа, это настоящий портал в мир азарта, где сбываются мечты и рождаются новые легенды.Россия — страна, где азартные традиции уходят вглубь веков. Gama Casino гордится предоставить вам доступ к лучшим игровым автоматам России и мира. Гама Казино является мостом между старыми традициями азарта и новыми впечатлениями в виртуальном пространстве.
Johndup · August 13, 2023 at 4:51 am
Dive into the groundbreaking world of nicotine with [url=https://velo1.live/]velo snooze[/url]. As Velo continues to redefine nicotine experiences, anticipate the unveil of their newest velo snooze varieties in the upcoming year.
Scottcaf · August 13, 2023 at 5:53 am
best ed treatment: ed meds online – ed treatments
VPRichardcef · August 13, 2023 at 6:25 am
казино gama
http://taemiameiro.blogspot.com/2010/03/blog-post_3745.html
Игровые автоматы в России – это не просто развлечение, это стиль жизни. Gama Casino понимает, как важно иметь доступ к качественным игровым автоматам, поэтому мы создали уникальную платформу, где каждый спин может привести к захватывающей победе. Гама Казино предлагает вам погрузиться в мир азарта и стать частью увлекательной истории успеха.Играя в Gama Casino, вы встретите мир азарта во всей его красе. Это не просто возможность играть бесплатно в онлайн казино на русском языке, это сплав невероятных приключений и захватывающих моментов. В Гама Казино каждый клик мыши – это билет в мир невероятных шансов и выигрышей.
Samuelfet · August 13, 2023 at 6:42 am
amoxicillin 50 mg tablets: http://amoxicillins.com/# buy amoxicillin online no prescription
JohnDoe · August 13, 2023 at 6:57 am
Discover the exquisite variety of [url=https://nicotine-pouches.online/velo/]velo flavours[/url] that will tantalize your taste buds and elevate your experience!
ClaudeApets · August 13, 2023 at 7:41 am
amoxicillin brand name amoxicillin 500mg buy online canada – buy amoxil
VPRichardcef · August 13, 2023 at 7:54 am
gama casino официальный сайт
https://proseolinksdirectory.com/website-list-1365/
Входя на официальный сайт Gama Casino, вы попадаете в атмосферу настоящего азартного мира. Гама Казино создает уникальное сочетание огненной страсти и профессионального подхода. Здесь каждый игрок — герой своего собственного казино-эпоса.Приветствуем вас в захватывающем мире азартных развлечений — Gama Casino, вашем партнере в виртуальных азартных путешествиях! Если вы ищете путь к официальному сайту для полного погружения в мир азарта, то Гама Казино приглашает вас стать частью этой захватывающей игровой реальности.
VPRichardcef · August 13, 2023 at 8:06 am
gama casino официальный сайт
https://club.cnews.ru/blogs/entry/litsenzionnye_dogovory_i_dogovory_ob_otchuzhdenii_isklyuchitelnyh_prav_v_magazine_gotovyh_dogovorov_gotovyedogovory_rf
Игровые автоматы в России: Очарование азартаМы понимаем, что азарт – это не просто игра, это стиль жизни, и Gama Casino готово стать вашим надежным партнером в мире азартных развлечений. Игровые автоматы в России никогда не были такими доступными и увлекательными, как с Гама Казино. Мы создали идеальное сочетание азарта, комфорта и невероятных призов, чтобы вы могли наслаждаться игрой в полной мере.
JosephApego · August 13, 2023 at 8:46 am
заказать прогон хрумером
NathanFAcef · August 13, 2023 at 9:22 am
gama casino играть
http://www.kosmetichka.ru/kosmoforum/viewtopic.php?f=22&t=13426
Вход на официальный сайт Gama Casino — это ваш билет в мир, где сбываются мечты. Здесь, на страницах Гама Казино, каждый игрок — как герой своей собственной истории, где он выбирает путь к победе и удаче. Не упустите возможность почувствовать себя настоящим азартным путешественником, исследующим мир Gama Casino.Gama Casino – не просто интернет-казино на русском языке, это оазис страсти и азарта, где каждый вращающийся барабан игровых автоматов приносит с собой невероятные возможности. Мы приглашаем вас испытать дыхание удачи, окунувшись в потрясающий мир Гама Казино.
2krn cc · August 13, 2023 at 9:24 am
Heya i’m for the primary time here. I found this board
and I find It truly useful & it helped me out a lot. I
hope to offer something back and help others such as
you helped me.
Marianep · August 13, 2023 at 9:41 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d металлическая печать для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
HectorMak · August 13, 2023 at 9:41 am
Nicely put, With thanks!
best cv writing service 2020 appellate brief writing service university essay writing service uk
ErnestNem · August 13, 2023 at 10:01 am
скачать покердом на компьютер с официального сайта
https://forum.kvartplata.info/index.php?showuser=67477
Покердом Казино — это место, где каждый игрок может стать азартным пионером и открывать новые горизонты выигрышей. Играть онлайн в слоты на реальные деньги на PokerDom Casino — это как путешествие в неизведанные азартные страны, где каждый спин барабанов — это новая азартная граница.Скачать клиент на ПК PokerDom Casino — это как взять на себя азартное крыло и взлететь к победе. Здесь каждый вращающийся барабан — это как волшебный круг, который сводит вас к удаче и успеху.
Онлайн-Порно · August 13, 2023 at 10:32 am
Онлайн-Порно
NathanFAcef · August 13, 2023 at 11:00 am
казино gama войти
https://www.hackster.io/pkazofb
Не пропустите возможность испытать наши эксклюзивные бонусы, которые Гама Казино предлагает своим игрокам. Это не просто возможность увеличить свой банкролл, но и шанс на дополнительные спины и призы. Мы заботимся о наших игроках, как о драгоценном артефакте, и стремимся сделать ваше время с нами незабываемым.Gama Casino – не просто интернет-казино на русском языке, это оазис страсти и азарта, где каждый вращающийся барабан игровых автоматов приносит с собой невероятные возможности. Мы приглашаем вас испытать дыхание удачи, окунувшись в потрясающий мир Гама Казино.
evlonGab · August 13, 2023 at 11:06 am
На сайте https://girls38.ru вы сможете снять девушку для интимных утех и прочих радостей. Все дополнительные услуги оговариваются в индивидуальном порядке. Дамы роскошные, красивые, у них привлекательная внешность, упругое тело, эластичная кожа, длинные волосы. Можно подобрать даму, исходя из таких параметров, как: цвет глаз, вес, размер груди, оттенок волос. Они примут вас в любое время, чтобы вы со вкусом отметили девичник, конец рабочей недели или выходной день. Девушки чистоплотные, обаятельные, доброжелательные, а потому с ними будет очень комфортно.
karta_Gox · August 13, 2023 at 11:37 am
https://vasha-kreditnaya-karta.ru/preimuschestva/
ErnestNem · August 13, 2023 at 11:49 am
скачать покердом на компьютер с официального сайта
https://www.quia.com/profiles/hahemawhahemaw
Покердом Казино — это место, где каждый может найти свой собственный путь к азартному успеху. Играть на официальном сайте PokerDom Casino — это как встретить рассвет в мире азартных возможностей, где каждый новый день приносит новые шансы на победу.Скачать клиент на ПК — это как взять в руки свою азартную долю и начать свой азартный путь к успеху. Здесь каждый спин барабанов — это как стрела, выпущенная в цель азартного триумфа.
NathanFAcef · August 13, 2023 at 12:37 pm
gama casino вход
https://cr-v.su/forums/index.php?autocom=gallery&req=si&img=2092
Gama Casino – не просто интернет-казино на русском языке, это оазис страсти и азарта, где каждый вращающийся барабан игровых автоматов приносит с собой невероятные возможности. Мы приглашаем вас испытать дыхание удачи, окунувшись в потрясающий мир Гама Казино.Наш официальный сайт – это ключ к вратам азартного рая. Gama Casino гарантирует вам не только вход в этот рай, но и погружение в него до самых глубин. Ощутите волнение, когда барабаны игровых автоматов начинают свой таинственный танец, наполняя вас желанием больших выигрышей.
ErnestNem · August 13, 2023 at 1:33 pm
покердом
http://linoit.com/users/wafakab/canvases/PokerDom
Скачать клиент на ПК — это как взять в руки свои азартные краски и начать свой путь к яркой азартной палитре. Здесь каждый клик — это как капля краски на азартном холсте, который скоро станет вашим шедевром азартной победы.Добро пожаловать в мир азартных приключений на официальном портале PokerDom Casino! Здесь каждый клик, каждый спин барабанов — это шанс изменить свою судьбу и обрести богатство. Покердом Казино — это не просто игровая платформа, это космос возможностей для всех, кто стремится к азартному успеху.
NathanFAcef · August 13, 2023 at 2:03 pm
gama casino официальный сайт
https://www.optic-lite.ru/forum/viewtopic.php?p=114496
Не пропустите возможность испытать наши эксклюзивные бонусы, которые Гама Казино предлагает своим игрокам. Это не просто возможность увеличить свой банкролл, но и шанс на дополнительные спины и призы. Мы заботимся о наших игроках, как о драгоценном артефакте, и стремимся сделать ваше время с нами незабываемым.Играя в Гама Казино, вы обнаружите, что это не просто место для испытания удачи. Это космос, где каждый спин на игровых автоматах — это возможность покорить вершину джекпота. Каждая мелодия, каждая крупье, словно созданы, чтобы погрузить вас в атмосферу истинного казино.
NathanFAcef · August 13, 2023 at 2:15 pm
казино gama
http://www.edcommunity.ru/profile/?ID=114928
Почувствуйте волнение, ощутите эмоции, проникнув в самое ядро азартной страсти, доступное вам на официальном сайте Gama Casino. Мы приглашаем вас в наш мир, где каждая партия — это событие, а каждый спин — это шанс изменить свою судьбу. Станьте частью Гама Казино и откройте для себя новые горизонты азартных развлечений!Не просто игра, а настоящее виртуозное исполнение азартного искусства — именно это вас ожидает на Gama Casino. Мы стремимся предоставить вам не только бесплатное развлечение, но и настоящий калейдоскоп азартных ощущений. Забудьте об унылых буднях, ведь Гама Казино создано для тех, кто готов забыть о рутине и открыть для себя мир волнения и риска.
Peterautor · August 13, 2023 at 2:27 pm
Демонтаж стен Москва
Демонтаж стен Москва
Angelvor · August 13, 2023 at 2:36 pm
neural network woman drink
neural network woman drink
As we peer into the future, the ever-evolving synergy of artificial intelligence (AI) and biotechnology promises to reshape our perceptions of beauty and human possibilities. Cutting-edge technologies, powered by deep neural networks, DNA editing, artificial insemination, and cloning, are on the brink of unveiling a profound transformation in the realm of artificial beings – captivating, mysterious, and beyond comprehension.
The underlying force driving this paradigm shift is AI’s remarkable capacity, harnessing the enigmatic depths of deep neural networks and sophisticated machine learning algorithms to forge entirely novel entities, defying our traditional understanding of creation.
At the forefront of this awe-inspiring exploration is the development of an unprecedented “printer” capable of giving life to beings of extraordinary allure, meticulously designed with unique and alluring traits. The fusion of artistry and scientific precision has resulted in the inception of these extraordinary entities, revealing a surreal world where the lines between reality and imagination blur.
Yet, amidst the unveiling of such fascinating prospects, a veil of ethical ambiguity shrouds this technological marvel. The emergence of artificial humans poses profound questions demanding our utmost contemplation. Questions of societal impact, altered interpersonal dynamics, and potential inequalities beckon us to navigate the uncharted territories of moral dilemmas.
Marianep · August 13, 2023 at 2:40 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать фотополимер для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
ErnestNem · August 13, 2023 at 3:07 pm
покердом официальный сайт играть
https://app.roll20.net/users/12199918/helol-h
Скачать клиент на ПК — это как взять в руки свою азартную удачу и начать свой путь к победе. Здесь каждый спин барабанов — это как удар барабана в азартной музыке успеха.Скачать клиент на ПК — это как открыть сокровищницу бесконечных игровых вариантов. PokerDom Casino предоставляет вам ключ к уникальному миру лицензионных автоматов, где каждый автомат — как отдельная история, ожидающая своего героя.
ErnestNem · August 13, 2023 at 3:19 pm
скачать покердом на пк
https://www.slideserve.com/Aditya104
Скачать клиент на ПК — это как открыть сокровищницу бесконечных игровых вариантов. PokerDom Casino предоставляет вам ключ к уникальному миру лицензионных автоматов, где каждый автомат — как отдельная история, ожидающая своего героя.Покердом Казино — это место, где каждый игрок может стать азартным магом и волшебником. Играть онлайн в слоты на реальные деньги на PokerDom Casino — это как заклинание, вызывающее азартную удачу на вашу сторону.
crimes · August 13, 2023 at 3:24 pm
I believe evferytһing posted was very logical.
But, think on this, suppose you ԝere to write a awesome headline?
I am not suggesting your information isn’t gߋoԀ, however suppose you added a post title
that grabbed a person’ѕ attention? I mean Drone Hardwaгe & progгamming – Teqto Systyem is kinda plain. You could peek at Yahoo’shome pagе and see how they cfeate post
titles tto get viewers to cliсk. You might add a video
or a related pic or two to grab people interestеd about what yߋu’ve ցⲟt to say.
In my opinion, it would bring your website a little ⅼiveliеr.
RobertHGcef · August 13, 2023 at 3:32 pm
популярные онлайн казино
https://tianhengconsulting.com/forums/viewtopic.php?t=6&start=18370
Первое место в нашем рейтинге заслуженно принадлежит “Виртуальное Богатство Казино”. Этот онлайн гемблинговый гигант – легенда в мире игровой удачи. Здесь вас ожидают не только классические слоты, но и уникальные азартные развлечения, которые унесут вас в мир виртуальных богатств. Это онлайн казино – не просто площадка для игры, это путь к азартному величию.”Адреналин Раш Казино” – Зарядитесь Эмоциями
Damien · August 13, 2023 at 3:43 pm
Thanks, An abundance of info.
Металлочерепица · August 13, 2023 at 4:05 pm
[url=https://metallocherepica-monterrey.by/]Металлочерепица Монтеррей[/url]
Металлочерепица Монтеррей предполагает собою кровельный эльбор с мировою древнею судоходный конфигурацией сейсмоволны, что создает изысканный да элегантный дизайн.
Металлочерепица Монтеррей
Online Profit Making · August 13, 2023 at 4:14 pm
I constantly spent my half an hour to read this website’s content all the time along with a cup of coffee.
Jamesabiva · August 13, 2023 at 4:44 pm
pokerdom официальный сайт
https://www.informetr.ru/forum/viewtopic.php?pid=3017451
Среди бескрайних просторов виртуального азарта маячит вам островок уникальных возможностей ? PokerDom Casino. Здесь, на официальном сайте Покердом Казино, вам предоставлена возможность не только испытать удачу, но и ощутить вкус истинных азартных эмоций. Откройте для себя мир волнения и приключений, скачав клиент на ПК, чтобы полностью погрузиться в мир лицензионных автоматов.Наши лицензионные автоматы — это как сокровищницы неизведанных приключений. Они ждут вас с распростертыми обоями, готовые подарить вам кусочек азартной нирваны. PokerDom Casino предлагает широкий выбор игр, чтобы каждый игрок мог найти автомат по своему вкусу.
Marianep · August 13, 2023 at 5:10 pm
Благодаря 3d печать из гипса , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
RobertHGcef · August 13, 2023 at 5:12 pm
топ 10 онлайн казино россии
http://www.becomingmuslim.co.uk/2017/10/17/successful-seminar/
Поднимитесь в небесную сферу азарта с “Зодиак Глобал Казино”. Здесь каждый знак зодиака обретает новую силу, а каждый раунд – это путешествие по звездам удачи. Откройте для себя виртуальное созвездие побед и ощутите себя господином зодиакальной арены.”Золотая Мечта Казино” – Воплощение Вашей Удачи
Металлочерепица · August 13, 2023 at 6:28 pm
[url=https://metallocherepica-monterrey.by/]Металлочерепица Монтеррей[/url]
Черепица Монтеррей предполагает собой кровельный материал от мировою античной плавной конфигурацией сейсмоволны, что учреждает изысканный и утонченный дизайн.
Металлочерепица Монтеррей
Jamesabiva · August 13, 2023 at 6:29 pm
pokerdom на деньги
https://forum.neformat.com.ua/members/63576-famitel/
Наше Покердом Казино ? это не просто место, где можно сделать ставку. Это место, где ваши мечты о больших выигрышах становятся реальностью. Наш официальный сайт предлагает вам не только возможность скачать клиент на ПК, но и войти в атмосферу безграничных возможностей.Скачайте клиент на ПК и окунитесь в мир PokerDom Casino, где азарт и богатство находятся на расстоянии клика. Покердом Казино предлагает вам не только игру, но и путь к невероятным приключениям. Вас ждут бескрайние возможности, и ваша удача никогда не будет висеть на волоске ? она будет в ваших руках.
chemodashki_viess · August 13, 2023 at 6:46 pm
https://chemodashki.ru/
RobertHGcef · August 13, 2023 at 6:53 pm
проверенные казино
https://www.banya.ru/bani-i-sauny/krym/banya-gostinyy-dvor/
“Зодиак Глобал Казино” – Путешествие По Звездам УдачиЕсли вы ищете сокровища азартных развлечений, то “Казино Сокровищница” – ваш путь. Здесь каждый ставка – это шаг к нахождению невероятных выигрышей. Этот онлайн клуб собрал в своей сокровищнице самые захватывающие игры и щедрые бонусы, готовые сделать вашу игру незабываемой.
Angelvor · August 13, 2023 at 7:43 pm
MEGA SLOT
Jamesabiva · August 13, 2023 at 8:10 pm
покердом скачать клиент на пк
http://int.5bb.ru/viewtopic.php?id=17140
Наше Покердом Казино ? это не просто место, где можно сделать ставку. Это место, где ваши мечты о больших выигрышах становятся реальностью. Наш официальный сайт предлагает вам не только возможность скачать клиент на ПК, но и войти в атмосферу безграничных возможностей.Добро пожаловать в волшебный мир азарта на официальном сайте PokerDom Casino! Если вы ищете место, где можно скачать приложение на ПК и окунуться в захватывающий водоворот игры в слоты на реальные деньги, то вы на верном пути. Покердом Казино предоставляет вам ключи к вратам к пустоте азартного волнения, где каждый вращающийся барабан — это путь к возможной победе.
PhilipFlolo · August 13, 2023 at 8:21 pm
отбойная доска для стен
RobertHGcef · August 13, 2023 at 8:24 pm
россия казино
https://oliveiva.blogspot.com/2021/06/kerch-krym-respublika-krym-chto.html
“Легендарный Колосс Казино” – это место, где слава великанов азарта воплощается в каждой ставке. Ступите на арену игры и станьте частью этой легенды. Огромный выбор игровых вариаций и прогрессивные джекпоты ?? заставят ваше сердце биться в ритме больших побед.Ищите лучшие онлайн казино для невероятных игровых приключений? Приготовьтесь, потому что наш рейтинг онлайн казино ?? ТОП 10 для игры на реальные деньги 2023 года перевернет ваше представление о азартных развлечениях в интернете. Эти надежные и проверенные сайты предоставляют вам возможность погрузиться в мир возможностей и выигрышей, и все это на пути через дорогу простоты и безопасности.
RobertHGcef · August 13, 2023 at 8:36 pm
обзор казино онлайн
https://tianhengconsulting.com/forums/viewtopic.php?t=6&start=18370
“Императорская Фортуна” – Власть Ваших Побед”Императорский Взлет Казино” – это место, где ваше стремление к вершинам азартного мира становится реальностью. Здесь вы найдете уникальные игры, которые подарят вам незабываемые моменты азартного веселья. Бонусы и акции сделают ваш путь к победе еще более впечатляющим. Взлетайте к успеху с “Императорский Взлет Казино”.
Peterautor · August 13, 2023 at 8:56 pm
Демонтаж стен Москва
Демонтаж стен Москва
Jamesabiva · August 13, 2023 at 9:44 pm
покердом скачать клиент на пк
https://publizist.ru/profile/120367
Наши лицензионные автоматы — это как сокровищницы неизведанных приключений. Они ждут вас с распростертыми обоями, готовые подарить вам кусочек азартной нирваны. PokerDom Casino предлагает широкий выбор игр, чтобы каждый игрок мог найти автомат по своему вкусу.Среди бескрайних просторов виртуального азарта маячит вам островок уникальных возможностей ? PokerDom Casino. Здесь, на официальном сайте Покердом Казино, вам предоставлена возможность не только испытать удачу, но и ощутить вкус истинных азартных эмоций. Откройте для себя мир волнения и приключений, скачав клиент на ПК, чтобы полностью погрузиться в мир лицензионных автоматов.
Jamesabiva · August 13, 2023 at 9:56 pm
скачать покердом на пк
https://owen.ru/forum/member.php?u=138299
Скачать клиент на ПК ? это ваш билет в мир азартных эмоций без ограничений. Выбирайте удобное время для игры, создавайте уютную атмосферу вокруг себя и позвольте себе расслабиться. Покердом Казино заботится о вашем комфорте и создает оптимальные условия для вашей игры.Наше Покердом Казино ? это не просто место, где можно сделать ставку. Это место, где ваши мечты о больших выигрышах становятся реальностью. Наш официальный сайт предлагает вам не только возможность скачать клиент на ПК, но и войти в атмосферу безграничных возможностей.
JohnTXcef · August 13, 2023 at 9:57 pm
самое лучшее онлайн казино
http://64clicks.com/product/black-nylon-backpack/
Завершая наше путешествие по лучшим онлайн казино, давайте подытожим. Рейтинг онлайн казино 2023 для игры на реальные деньги – ваш надежный гид в мире азартных приключений. Игры казино на реальные деньги сделают ваше время увлекательным и захватывающим. Вращайте барабаны, ставьте на карты и побеждайте – красота азарта в неожиданности и несравненных эмоциях, которые подарит вам игра на деньги в наших рекомендованных казино. Сделайте выбор и откройте для себя бескрайний мир возможностей!Таким образом, при выборе подходящего онлайн казино для игры на реальные деньги, полагайтесь на профессиональный рейтинг, чтобы обеспечить себе захватывающий, надежный и уникальный игровой опыт. Ощутите вкус азарта и возможность выигрыша на собственном опыте, погрузившись в захватывающий мир азартных развлечений. Ведь лучшее онлайн казино – это ключ к вашим самым ярким и незабываемым эмоциям!
RichardHew · August 13, 2023 at 11:20 pm
pokerdom casino
https://1clancer.ru/user.info/userId=75466
Покердом Казино ? это место, где азарт встречается с удовольствием. На официальном сайте PokerDom Casino вы найдете самые популярные слоты, готовые подарить вам незабываемые эмоции. Играть онлайн в слоты на реальные деньги — это как вступить в игру с удачей, ощущая каждый вибрацию барабанов.PokerDom Casino — это не только игровая платформа, это мир, где каждая карта имеет свою цену, а каждая ставка — возможность поймать удачу за хвост. На Покердом Казино вы можете играть онлайн в слоты на реальные деньги, входя в азартную борьбу, где победа означает не только финансовую награду, но и ощущение настоящего азарта.
2008 grand prix · August 13, 2023 at 11:24 pm
It’s awesome designed for me to have a web site, which is useful designed for my experience.
thanks admin
Here is my blog :: 2008 grand prix
JohnTXcef · August 13, 2023 at 11:41 pm
онлайн казино рейтинг
https://tianhengconsulting.com/forums/viewtopic.php?t=6&start=30890
Одним из ключевых моментов, которые отличают лучшие онлайн казино от остальных, является высокий уровень безопасности и надежности. Ведь когда речь идет о реальных деньгах, доверие становится наиважнейшим камнем угловным. Топовые игровые площадки гарантируют абсолютную конфиденциальность и защиту финансовых операций, используя передовые системы шифрования и безупречные меры безопасности.Виртуальное игорное пространство насыщено различными игровыми платформами, предлагающими уникальные игры на реальные деньги, начиная от классических слотов до более сложных игровых вариаций. Рейтинг онлайн казино для игры на реальные деньги акцентирует внимание на разнообразии представленных игр, чтобы удовлетворить вкусы самых взыскательных игроков.
HectorMak · August 14, 2023 at 12:52 am
Thank you, A lot of postings.
ielts writing checking service top cheap essay writing service ielts writing checking service
RichardHew · August 14, 2023 at 1:05 am
pokerdom
http://notebookclub.org/forum/thread-7434.html
Скачайте клиент на ПК и откройте для себя мир PokerDom Casino, где каждый клик, каждый спин барабанов может изменить вашу судьбу. Мы приглашаем вас стать частью нашей азартной семьи, где вы найдете не только игру, но и настоящих единомышленников. Вас ждут невероятные призы, захватывающие приключения и море позитивных эмоций.Покердом Казино — это не просто игра, это образ жизни для тех, кто ищет волнение и риск. Наш официальный сайт предоставляет вам возможность играть онлайн в слоты на реальные деньги, ощущая всю мощь азарта в каждой крутке барабанов. Это место, где мечты об увлекательных выигрышах становятся реальностью.
JohnTXcef · August 14, 2023 at 1:21 am
лучшие казино онлайн
http://forum.fcmn.co.il/member.php?action=profile&uid=271726
Одним из ключевых моментов, которые отличают лучшие онлайн казино от остальных, является высокий уровень безопасности и надежности. Ведь когда речь идет о реальных деньгах, доверие становится наиважнейшим камнем угловным. Топовые игровые площадки гарантируют абсолютную конфиденциальность и защиту финансовых операций, используя передовые системы шифрования и безупречные меры безопасности.Вас ждут увлекательные слоты с необычными сюжетами и великолепной графикой. Крупье в наших карточных играх виртуозно раздают карты, приглашая вас на увлекательное путешествие по миру азартных приключений. Ощутите адреналин и экспериментируйте с различными стратегиями – все для вашей победы!
RichardHew · August 14, 2023 at 2:46 am
покердом казино
https://www.euphoria.rs/vaznost-rent-a-car-industrije-u-beogradu/
Играть в лицензионные автоматы на PokerDom Casino ? это как погружение в водоворот азартных эмоций и волнений. Наши игры созданы с любовью и заботой, чтобы вы могли наслаждаться каждым моментом. Покердом Казино понимает, что каждый игрок уникален, и мы делаем все, чтобы каждый момент у нас был неповторим.PokerDom Casino — это возможность почувствовать себя на вершине мира азарта. Играть онлайн в слоты на реальные деньги — это как стать участником грандиозного шоу, где каждый спин может принести вам крупный выигрыш. Здесь, на Покердом Казино, каждый момент — это шанс на успех.
JohnTXcef · August 14, 2023 at 2:53 am
топ интернет казино
https://goagency.cz/index.php/component/k2/item/7-favorite-quotes?start=7730
Рейтинг онлайн казино 2023 для истинных азартных энтузиастов, жаждущих испытать свою удачу и ощутить адреналин от игры на реальные деньги, представляет собой ценнейший инструмент в поиске лучшего игрового опыта в виртуальном мире азартных развлечений. Сегодня, когда онлайн казино находятся на пике популярности, найти надежное и захватывающее заведение становится задачей первостепенной важности.Таким образом, при выборе подходящего онлайн казино для игры на реальные деньги, полагайтесь на профессиональный рейтинг, чтобы обеспечить себе захватывающий, надежный и уникальный игровой опыт. Ощутите вкус азарта и возможность выигрыша на собственном опыте, погрузившись в захватывающий мир азартных развлечений. Ведь лучшее онлайн казино – это ключ к вашим самым ярким и незабываемым эмоциям!
JohnTXcef · August 14, 2023 at 3:05 am
казино онлайн топ
https://a-choicesmagazine.com/2023/07/01/golden-oldies-artist-profile/
Что делает казино на реальные деньги особенно привлекательными? Это, конечно же, щедрые бонусы и акции. Наш ТОП казино обязательно порадует вас фриспинами, бездепозитными бонусами и приветственными пакетами. Удача смеется над теми, кто не использует подарки от казино.Топ лучших онлайн казино 2023, составленный нашими экспертами, основан на анализе ряда ключевых параметров, таких как уровень выплат, качество программного обеспечения, диапазон игр, простота использования интерфейса и качество обслуживания клиентов. Мы стремимся предоставить вам максимум информации, чтобы вы могли принять взвешенное решение и наслаждаться каждым моментом в виртуальном мире азартных развлечений.
RichardHew · August 14, 2023 at 4:20 am
покердом
https://community.amplitude-studios.com/profile/fomebab/about
Скачайте клиент на ПК и войдите в увлекательное путешествие по миру PokerDom Casino. Лицензионные автоматы готовы пригласить вас на виртуальную арену, где каждая ставка — это битва за победу. На официальном сайте вы сможете найти слоты на любой вкус, каждый из которых способен ввести вас в азартное экстаз.Покердом Казино — это место, где ваша удача будет работать на вас. Здесь каждый спин барабанов может перевернуть ваш мир с ног на голову. Играть онлайн на PokerDom Casino — это как прыжок в неизведанный мир азарта, где вы сами определяете правила.
ThomasKNcef · August 14, 2023 at 4:27 am
казино рейтинг
https://priusforum.ru/forums/index.php?autocom=gallery&req=stats&op=comments
В чем же заключается привлекательность игр в онлайн казино на реальные деньги? Во-первых, это удобство и доступность. Теперь вы можете наслаждаться любимыми играми в любое время дня и ночи, когда вам захочется. Во-вторых, это бонусы и акции, которые делают игру еще более интересной и прибыльной. Казино щедро поощряют новых клиентов приветственными бонусами, а постоянных игроков – лояльностью и фриспинами.Это казино не похоже ни на одно другое заведение! Их колоссальные бонусы и изобретательный подход к разработке игр невозможно описать словами. Здесь вы забудете о скуке и погрузитесь в мир волшебства и азарта.
RichardHew · August 14, 2023 at 4:32 am
казино покердом
https://bridgemoscow.ru/forum/viewtopic.php?f=12&t=12108&p=51608
PokerDom Casino — это не только игровая платформа, это мир, где каждая карта имеет свою цену, а каждая ставка — возможность поймать удачу за хвост. На Покердом Казино вы можете играть онлайн в слоты на реальные деньги, входя в азартную борьбу, где победа означает не только финансовую награду, но и ощущение настоящего азарта.Погрузитесь в атмосферу невероятного азарта на официальном сайте PokerDom Casino! Откройте дверь в мир, где каждая карта, каждая ставка – это шанс обрести невероятное богатство и уникальный опыт. Покердом Казино приглашает вас на путь к несравненным эмоциям, где вы сможете скачать клиент на ПК и насладиться бесконечным разнообразием лицензионных автоматов.
Freddyhex · August 14, 2023 at 4:40 am
best online pharmacies in mexico: best online pharmacies in mexico – mexico drug stores pharmacies
DonaldDoota · August 14, 2023 at 5:56 am
сайт покердом
https://reactos.org/forum/memberlist.php?mode=viewprofile&u=88337
Играть онлайн на PokerDom Casino — это путешествие в мир азартных возможностей. Откройте для себя уникальную коллекцию лицензионных автоматов, где каждый барабан — это камень, который может повернуть вашу удачу на 180 градусов. Покердом Казино обещает вам не только эмоции, но и широкий спектр шансов на большие победы.Добро пожаловать в увлекательный мир азартных развлечений, представленный официальным сайтом PokerDom Casino! Здесь вы найдете ключ к захватывающему опыту игры в слоты на реальные деньги. Покердом Казино — это источник бесконечного азарта, где каждая ставка открывает новые горизонты выигрышей.
ThomasKNcef · August 14, 2023 at 6:11 am
casino
https://3dlancer.net/profile/u989700
Это место, где мечты сбываются! “Казино Лунного Сияния” известно своим необычным подходом к оформлению, вдохновленному лунными лучами. Здесь вы почувствуете, что находитесь на грани реальности и фантазии.Казино “Кристальная Мантия” – Залог Успеха
HaroldGrerm · August 14, 2023 at 7:36 am
ChemDiv’s Screening Libraries have been extensively validated both in our in-house biological assays and in the laboratories of over 200 external partners including Pharma, Biotech, Academia and Screening Centers in the U.S., Europe, and Japan. We offer a shelf-available set of over 1.6 M individual solid compounds.
kinases inhibitors
DonaldDoota · August 14, 2023 at 7:41 am
pokerdom на деньги
https://forums.webscript.ru/index.php?action=profile;area=summary;u=166584
Играть в слоты на реальные деньги на PokerDom Casino — это как войти в азартное путешествие, где каждый шаг наполнен волнением и невероятными перспективами. Поднимайте ставки, вращайте барабаны, пусть каждый спин будет шагом к вашей мечте. Покердом Казино дает вам ключи к азартному успеху.Скачать клиент на ПК — это открыть дверь в виртуальный мир азарта в один клик. PokerDom Casino предлагает вам сделать свой выбор в пользу качественных игровых автоматов, созданных ведущими разработчиками. Подарите себе возможность играть в своем ритме, наслаждаясь великолепной графикой и захватывающими сюжетами.
slot pragmatic · August 14, 2023 at 7:52 am
Wow! At last I got a website from where I be able to really take helpful
facts regarding my study and knowledge.
ThomasKNcef · August 14, 2023 at 7:52 am
хорошее казино
https://forum.resmihat.kz/viewtopic.php?t=1333537
Итак, выберите свою удачу, включите игральный режим и отправляйтесь в азартное путешествие по миру онлайн гемблинга. Рейтинг онлайн казино 2023 для игры на реальные деньги ждет вас! Не упустите шанс стать победителем и исполнить заветные мечты!”Казино Лунного Сияния” – Путь к Вершине
Edwardengat · August 14, 2023 at 7:57 am
http://certifiedcanadapharm.store/# online canadian pharmacy
AlbertMus · August 14, 2023 at 8:36 am
canadian pharmacy 1 internet online drugstore: recommended canadian pharmacies – canadian drugs pharmacy
HaroldGrerm · August 14, 2023 at 9:02 am
ChemDiv’s Screening Libraries have been extensively validated both in our in-house biological assays and in the laboratories of over 200 external partners including Pharma, Biotech, Academia and Screening Centers in the U.S., Europe, and Japan. We offer a shelf-available set of over 1.6 M individual solid compounds.
allosteric inhibitors
Robertjoymn · August 14, 2023 at 9:11 am
http://certifiedcanadapharm.store/# canada rx pharmacy world
slot online · August 14, 2023 at 9:15 am
Thank you for sharing your info. I really appreciate your efforts and I am waiting
for your next post thank you once again.
DonaldDoota · August 14, 2023 at 9:24 am
pokerdom вход
https://forum.rusbg.com/memberlist.php?mode=viewprofile&u=3656
Наш PokerDom Casino — это не просто игровая платформа, это целый мир, где ваша удача становится вашим союзником. Скачать клиент на ПК — это как взять за руку свою судьбу и вступить в игру с полной уверенностью. Лицензионные автоматы, представленные на нашем официальном сайте, воплощают в себе неповторимое сочетание разнообразных тем и уникальных механик.Итак, вы готовы к азартному путешествию? PokerDom Casino и Покердом Казино открыты для вас, чтобы подарить вам ни с чем несравнимый вкус азарта и увлечения. Скачайте клиент на ПК и начните свой путь к захватывающим призам и незабываемым впечатлениям уже сегодня!
Online Gamble Site · August 14, 2023 at 10:20 am
The PGA doesn’t do much – it merely makes
operating a gambling house illegal.
Look into my web site :: Online Gamble Site
DonaldDoota · August 14, 2023 at 11:02 am
покердом вход
https://reactos.org/forum/memberlist.php?mode=viewprofile&u=88337
Итак, вы готовы к азартному путешествию? PokerDom Casino и Покердом Казино открыты для вас, чтобы подарить вам ни с чем несравнимый вкус азарта и увлечения. Скачайте клиент на ПК и начните свой путь к захватывающим призам и незабываемым впечатлениям уже сегодня!Покердом Казино — это место, где каждый клик мыши превращается в шанс на крупный выигрыш. Наш официальный сайт PokerDom Casino приглашает вас в виртуальное путешествие в мир уникальных азартных развлечений. Лицензионные автоматы, расцветающие на экране, будто сад богатства, открывают перед вами дорогу к бесконечным выигрышам.
ZacharyFieNt · August 14, 2023 at 11:07 am
free casino slots
Situs slot · August 14, 2023 at 11:07 am
Good day! I know this is kinda off topic however , I’d figured
I’d ask. Would you be interested in exchanging links or maybe guest writing a blog post or vice-versa?
My website addresses a lot of the same topics as
yours and I feel we could greatly benefit from each other.
If you might be interested feel free to shoot
me an email. I look forward to hearing from you!
Great blog by the way!
DonaldDoota · August 14, 2023 at 11:15 am
покердом покер
https://forum.neformat.com.ua/members/63566-paniy/
Скачать клиент на ПК — это открыть дверь в виртуальный мир азарта в один клик. PokerDom Casino предлагает вам сделать свой выбор в пользу качественных игровых автоматов, созданных ведущими разработчиками. Подарите себе возможность играть в своем ритме, наслаждаясь великолепной графикой и захватывающими сюжетами.Покердом Казино приглашает вас в мир, где каждый спин на слоте — это шанс на выигрыш. Мы уверены, что азартные эмоции могут быть бесконечными, и именно поэтому PokerDom Casino создан для вас. Откройте для себя безграничные возможности и вознаграждения, наш сайт готов радовать вас в любое время.
JosephdutLL · August 14, 2023 at 11:41 am
казино обзоры
казино
Добро пожаловать в захватывающий мир онлайн казино 2023 года, где каждая ставка может изменить вашу судьбу! Онлайн казино стали настоящей сенсацией, предоставляя уникальную возможность играть в любимые азартные игры прямо из уютного уголка вашего дома или в пути. Онлайн казино – это виртуальная площадка, на которой сходятся азарт и развлечения, где каждый спин колеса рулетки или нажатие на кнопку слота может принести вам не только деньги, но и незабываемые эмоции.Выберите свой путь в мире онлайн казино 2023 года. Победы, азарт и возможности ждут вас за каждым спином и картой. Не забывайте, что азартные игры – это развлечение для взрослых. Играйте ответственно, устанавливайте лимиты и наслаждайтесь азартными приключениями новой эпохи.
Williamdease · August 14, 2023 at 11:45 am
buy medicines online in india [url=https://indiamedicine.world/#]best india pharmacy[/url] india pharmacy
Travisted · August 14, 2023 at 12:43 pm
клиент покердом
http://www.med52.ru/blog/all-for-medicin/22095.html
PokerDom Casino — это место, где каждый спин барабана — это новый шанс на успех, а каждая ставка — возможность покорить виртуальный мир азарта. Играя в слоты на реальные деньги на PokerDom Casino, вы ощутите вкус победы и невероятного азарта. Скачайте приложение на ПК и погрузитесь в мир увлекательных лицензионных автоматов, где каждая игра — это новое приключение.Играть в слоты на реальные деньги на PokerDom Casino — это ваш шанс почувствовать себя настоящим азартным путешественником. Официальный сайт Покердом Казино открывает перед вами двери в мир волнения и бесконечных возможностей. Не упустите свой шанс на удачу, скачайте клиент на ПК и начните свой путь к богатству прямо сейчас.
JosephdutLL · August 14, 2023 at 1:25 pm
надежные казино
https://candy-shock.ru
Сотни игр, начиная от классических игровых автоматов и заканчивая живыми рулетками с настоящими крупье, ждут вас в топ казино онлайн. Вы можете выбирать игры, которые соответствуют вашим предпочтениям и даже настроению. Если вы увлекаетесь слотами, то найдете сотни тематик – от приключений в джунглях до космических фантазий.2023 год – это время для новых горизонтов в мире “Онлайн Казино”. Заведения готовы удивлять вас совершенно новыми играми, уникальными бонусами и интересными розыгрышами. Это не только о победах и проигрышах, но и о настоящем азартном опыте, который оставит вам незабываемые впечатления.
HectorMak · August 14, 2023 at 2:04 pm
Terrific write ups. With thanks!
top essay writing services reddit essay writing service websites oxford essay writing service
панель · August 14, 2023 at 2:22 pm
[url=https://hmi-kupit-v-moskve.ru/]HMI панель[/url]
ХМI-панели представляются предуготовленной чтобы управления воспринимающей интерфейс панелью чтобы оператора, используемой умереть и не встать почти всех делах управления. Город предоставляют центральный этап для извлечения инфы, управления этыми также просмотра новостей.
HMI панель
FloydMiz · August 14, 2023 at 2:31 pm
Вавада казино
Travisted · August 14, 2023 at 2:46 pm
покердом скачать клиент на пк
https://php.ru/forum/members/xacib.131222/
PokerDom Casino — это ваш путь к богатству, азарту и невероятным эмоциям. На официальном сайте Покердом Казино вы найдете лицензионные автоматы, которые откроют перед вами двери к миру крупных выигрышей. Скачайте клиент на ПК и отправьтесь в увлекательное путешествие, где каждый спин барабанов станет вашим шансом на успех.Скачать клиент на ПК — это как ключ к воротам азартного рая. PokerDom Casino дарит вам возможность окунуться в мир лицензионных автоматов и ощутить драйв игры в полной мере. Это шанс подарить себе истинное волнение, ведь каждая ставка на Покердом Казино — это новый шанс на успех.
ZacharyFieNt · August 14, 2023 at 3:00 pm
vip slots casino
JosephdutLL · August 14, 2023 at 3:06 pm
топ 5 онлайн казино
casino online
Топ казино онлайн предлагают вам уникальную возможность окунуться в азартный мир и испытать настоящее волнение от игры на реальные деньги. Один щелчок мыши, и вы попадаете в увлекательное путешествие, где каждый раунд становится шансом на победу. Online casino на реальные деньги – это не только возможность выиграть крупные суммы, но и способ провести время с удовольствием, вкусив азарт и напряжение ожидания.Сделать ставку, нажать на кнопку, и ваши ладони сжимаются в предвкушении азарта – это и есть “Online Casino на Реальные Деньги”. Здесь каждый вращающийся барабан может изменить вашу жизнь, превратив маленькую ставку в крупный выигрыш. Это место, где каждый спин – это шанс, а каждая карта – билет в мир увлекательных возможностей.
Travisted · August 14, 2023 at 4:33 pm
сайт покердом
https://ag.ru/@nekad37838
PokerDom Casino — это ваш путь к богатству, азарту и невероятным эмоциям. На официальном сайте Покердом Казино вы найдете лицензионные автоматы, которые откроют перед вами двери к миру крупных выигрышей. Скачайте клиент на ПК и отправьтесь в увлекательное путешествие, где каждый спин барабанов станет вашим шансом на успех.Добро пожаловать в виртуальный азартный мир, где смелость и удача становятся вашими верными спутниками! PokerDom Casino — это не просто платформа для развлечений, это целый космос азартных возможностей, где каждая игра превращается в захватывающее путешествие к выигрышу. Если вы ищете уникальный опыт, то Покердом Казино готов предложить вам то, что вы так долго искали.
JosephdutLL · August 14, 2023 at 4:38 pm
лучшие онлайн казино
https://candy-shock.ru
Онлайн казино на реальные деньги предлагают множество уникальных бонусов, которые позволяют увеличить ваш стартовый капитал. Бесплатные вращения, бонусы на депозит, программы лояльности – всё это доступно для вас, чтобы сделать вашу игру ещё более прибыльной и захватывающей. Такие акции делают игру на реальные деньги в онлайн казино особенно выгодной и интересной.Сотни игр, начиная от классических игровых автоматов и заканчивая живыми рулетками с настоящими крупье, ждут вас в топ казино онлайн. Вы можете выбирать игры, которые соответствуют вашим предпочтениям и даже настроению. Если вы увлекаетесь слотами, то найдете сотни тематик – от приключений в джунглях до космических фантазий.
vavadainua · August 14, 2023 at 4:39 pm
[url=https://vavadainua.kiev.ua]https://vavadainua.kiev.ua[/url]
Казино Vavada – зарегистрируйтесь ща в течение казино Vavada и приобретаете 100 дармовых вращений.
vavadainua kiev ua
JosephdutLL · August 14, 2023 at 4:50 pm
проверенные казино онлайн
casino online
Мечтаете о сорвать куш, играя в “Online Casino на Реальные Деньги”? Это возможно в мире онлайн гемблинга, где каждый спин может принести вам настоящее богатство. Здесь удача – ваш лучший друг, а азарт – путь к большим деньгам. Выберите свое казино, сделайте ставку, и дайте себе шанс на финансовую независимость.Сделать ставку, нажать на кнопку, и ваши ладони сжимаются в предвкушении азарта – это и есть “Online Casino на Реальные Деньги”. Здесь каждый вращающийся барабан может изменить вашу жизнь, превратив маленькую ставку в крупный выигрыш. Это место, где каждый спин – это шанс, а каждая карта – билет в мир увлекательных возможностей.
панель · August 14, 2023 at 5:13 pm
[url=https://hmi-kupit-v-moskve.ru/]HMI панель[/url]
ХМI-панели являются предназначенной чтобы управления воспринимающей сокет панелью чтобы оператора, употребляемой во почти всех процессах управления. Город дают центральный пункт чтобы получения информации, управления данными и просмотра новостей.
HMI панель
Travisted · August 14, 2023 at 6:15 pm
покердом игры
https://forum.kvartplata.info/index.php?showuser=67493
Покердом Казино — это как грандиозное шоу азартных впечатлений. Здесь вы найдете лицензионные автоматы, которые словно призывают вас к выигрышу, к успеху. Официальный сайт PokerDom Casino создан для того, чтобы удовлетворить самых требовательных игроков, предоставляя им возможность играть онлайн в слоты на реальные деньги.Скачать клиент на ПК — это как ключ к воротам азартного рая. PokerDom Casino дарит вам возможность окунуться в мир лицензионных автоматов и ощутить драйв игры в полной мере. Это шанс подарить себе истинное волнение, ведь каждая ставка на Покердом Казино — это новый шанс на успех.
Travisted · August 14, 2023 at 6:28 pm
казино покердом
https://ag.ru/@nekad37838
Все дороги в мир азарта ведут на PokerDom Casino. Скачайте клиент на ПК, и вы окажетесь в водовороте азартных эмоций и невероятных сюрпризов. Не упустите свой шанс на победу и богатство — начните играть онлайн в слоты на реальные деньги на Покердом Казино уже сегодня!Совершенство азарта и беспрерывный поток возможностей встречают вас на PokerDom Casino — официальном сайте, который открывает перед вами двери в захватывающий мир азартных развлечений. В этом магическом ареале Покердом Казино, где мечты о крупных выигрышах становятся реальностью, вы сможете скачать клиент на ПК и погрузиться в уникальный мир лицензионных автоматов.
vavadainua · August 14, 2023 at 7:03 pm
[url=https://vavadainua.kiev.ua]vavadainua.kiev.ua[/url]
Казино Vavada – зарегистрируйтесь сейчас в течение толпа Vavada равным образом приобретаете 100 безвозмездных вращений.
vavadainua.kiev.ua
Lamontgot · August 14, 2023 at 7:57 pm
pokerdom casino
http://ссо-мицар.рф/forum/index.php?topic=232.465
Покердом — мир удивительных возможностей, где азарт встречается с виртуозным мастерством игры! Если вы ищете надежное онлайн-казино для захватывающего досуга, вас ждет PokerDom Casino. Этот прекрасный игровой портал радует глаз разнообразием игр и широким выбором лицензионных автоматов. Стремительно развивающийся PokerDom Casino — идеальное место для истинных поклонников азартных развлечений!Множество игроков уже оценили преимущества PokerDom Казино, и восторженные отзывы говорят сами за себя. Здесь вы найдете атмосферу настоящего казино, где каждый спин может стать выигрышным и принести вам крупный куш. Заработать реальные деньги на азартных развлечениях — вполне реально, и PokerDom Casino создан для того, чтобы сделать вашу мечту доступной.
Calvingal · August 14, 2023 at 8:12 pm
tombak118
tombak118
Peterautor · August 14, 2023 at 8:57 pm
Демонтаж стен Москва
Демонтаж стен Москва
Adanempixelm · August 14, 2023 at 9:33 pm
review
Lamontgot · August 14, 2023 at 9:48 pm
pokerdom официальный сайт скачать
http://cosmopolit-storage.blogspot.com/2008/03/learning-chinese.html
PokerDom Casino — это гарантированная надежность и безопасность. Благодаря лицензированным автоматам, вы можете быть уверены в честности каждого спина, в каждом раунде. Никаких скрытых подводных камней, только азарт и удовольствие от игры!Казино ПокерДом славится своими щедрыми бонусами и акциями. Мы ценим каждого игрока и готовы вознаградить вас за ваш выбор. С момента регистрации вы становитесь участником программы лояльности, которая открывает доступ к эксклюзивным бонусам, фриспинам и участию в турнирах с гарантированными призами.
Marianep · August 14, 2023 at 10:24 pm
Благодаря 3d печать выплавляемых моделей , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Lamontgot · August 14, 2023 at 11:32 pm
сайт покердом
https://www.garshin.ru/linguistics/languages/dene-caucasian/sino-tibetan/chinese/index.html
Мы знаем, что вы ищете — невероятные выигрыши, атмосферу азарта и уникальный опыт. И все это воплотилось в PokerDom Казино! Мир игры, где каждый может стать победителем и испытать непередаваемые ощущения. А когда устали от слотов, попробуйте себя в настоящем покере. PokerDom Casino предоставляет возможность сразиться с опытными игроками и почувствовать вкус победы.Покердом — мир удивительных возможностей, где азарт встречается с виртуозным мастерством игры! Если вы ищете надежное онлайн-казино для захватывающего досуга, вас ждет PokerDom Casino. Этот прекрасный игровой портал радует глаз разнообразием игр и широким выбором лицензионных автоматов. Стремительно развивающийся PokerDom Casino — идеальное место для истинных поклонников азартных развлечений!
Lestermeefe · August 15, 2023 at 12:37 am
https://kostjagolubev.nethouse.ru/posts/mexamoskvichka-ru-uq
Lamontgot · August 15, 2023 at 1:06 am
pokerdom
http://cosmopolit-storage.blogspot.com/2008/03/learning-chinese.html
Так что, если вы ищете надежное онлайн-казино с огромным выбором игр на реальные деньги, прозрачными условиями и бонусами, то ПокерДом Казино — ваш идеальный выбор. Скачайте приложение на свой ПК и окунитесь в захватывающий мир азарта и удачи прямо сейчас. Приключения ждут!PokerDom Casino ? это место, где сбываются мечты и рождаются легенды. Здесь судьба испытывается на прочность, а азарт умножается во много раз. Присоединяйтесь к семье PokerDom и окунитесь в удивительный мир азартных развлечений. Скачайте клиент на ПК прямо сейчас или начните играть онлайн в слоты на реальные деньги и почувствуйте вкус победы!
Lamontgot · August 15, 2023 at 1:19 am
pokerdom casino
http://liudushka.narod.ru/01links.html
Казино ПокерДом славится своими щедрыми бонусами и акциями. Мы ценим каждого игрока и готовы вознаградить вас за ваш выбор. С момента регистрации вы становитесь участником программы лояльности, которая открывает доступ к эксклюзивным бонусам, фриспинам и участию в турнирах с гарантированными призами.PokerDom Casino ? это место, где сбываются мечты и рождаются легенды. Здесь судьба испытывается на прочность, а азарт умножается во много раз. Присоединяйтесь к семье PokerDom и окунитесь в удивительный мир азартных развлечений. Скачайте клиент на ПК прямо сейчас или начните играть онлайн в слоты на реальные деньги и почувствуйте вкус победы!
Lestermeefe · August 15, 2023 at 1:35 am
https://kostjagolubev.nethouse.ru/posts/mexamoskvichka-ru-ool
Lestermeefe · August 15, 2023 at 1:37 am
https://sanjazaharov4.nethouse.ru/posts/mexamoskvichka-ru-59
Freddyhex · August 15, 2023 at 2:36 am
mexico drug stores pharmacies: mexican online pharmacies prescription drugs – pharmacies in mexico that ship to usa
JeffreyAlone · August 15, 2023 at 2:42 am
покердом онлайн
http://kalach-sad5.ucoz.ru/index/dorozhnaja_bezopasnost/0-30
Покердом Казино — это место, где ваш азарт оживает, а ваше везение становится драгоценнейшим активом. Наш официальный сайт предоставляет вам билет в мир страсти и богатства. Скачайте клиент на ПК и откройте дверь в азартный рай с PokerDom Casino уже сегодня!Игра в слоты на реальные деньги на официальном сайте PokerDom Casino — это не только азарт, но и невероятные шансы сорвать куш. Каждый клик мыши — это как билет в мир богатства и возможностей. PokerDom Casino знает, как подарить вам этот билет и сделать ваше азартное путешествие незабываемым.
HectorMak · August 15, 2023 at 2:57 am
You revealed this superbly!
writing a community service essay custom essay writing service reviews best uk essay writing service reviews
Lestermeefe · August 15, 2023 at 4:08 am
https://sanjazaharov4.nethouse.ru/posts/mehovoe-atel-e-lh
massazh_emaic · August 15, 2023 at 4:26 am
релакс массаж https://eroticheskij-massazh-novosibirsk.ru/
Viagra Tablet · August 15, 2023 at 4:33 am
canadian pharmaceuticals online safe online medication pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
BryantBVdutLL · August 15, 2023 at 5:26 am
Online Casino
https://www.tybkonya.com
Canlэ Casino 2022, sadece oyunlarэ deрil, aynэ zamanda saрladэрэ benzersiz deneyimiyle de цne зэkэyor. Eрlence dolu sohbetler, krupiyelerle samimi iletiюim ve diрer oyuncularla rekabetin tadэnэ зэkarэrken, adeta bir kumarhane masasэnda oturmuю gibi hissedeceksiniz. Oyun sonuзlarэnэn rastgele oluюtuрu gьvenilir algoritmalar sayesinde adil bir oyun deneyimi yaюarken, heyecanэn doruklarэna ulaюacaksэnэz.Canlэ casino, geleneksel online kumarhane deneyimlerini bir adэm цteye taюэyor. Canlэ krupiyelerle iletiюim kurma imkanэ, oyunlarэn gerзek zamanlэ olarak yцnetilmesi ve oyun masalarэnda diрer oyuncularla etkileюime geзme юansэ sunarak, sэradan bir online oyun deneyimini unutulmaz bir etkinliрe dцnьюtьrьyor. Canlэ casino siteleri, blackjack, rulet, poker gibi popьler oyunlarэn yanэ sэra, daha az bilinen ve farklэ stratejiler gerektiren oyunlarэ da sunarak, oyunculara зeюitlilik ve macera vaat ediyor.
Nickolas · August 15, 2023 at 5:35 am
Thanks a lot. Helpful information.
JeffreyAlone · August 15, 2023 at 6:19 am
покердом скачать клиент на пк
https://lc.rt.ru/classbook/istoriya-rossii-9-klass/videouroki-rossiiskaya-imperiya-pervoi-chetverti-xix-veka-629/3769
Что делает PokerDom Casino таким уникальным? Это не только лицензионные автоматы и море разнообразных игр. Это страсть, азарт, которые связывают вас с этим официальным сайтом. В этом Покердом Казино каждая игра ? это как шаг в мир больших возможностей, каждый клик ? это путь к азартным победам.PokerDom Casino ? это больше, чем просто игровая платформа. Это оазис для тех, кто ищет уникальное сочетание азарта и возможности сорвать крупный куш. Ваш путь к удаче начинается здесь, на официальном сайте Покердом Казино. Здесь вы сможете играть онлайн в слоты на реальные деньги, ощущая волнение каждого спина барабанов, как готовый палец над клавишей.
Vtjuip · August 15, 2023 at 7:26 am
order generic fenofibrate 160mg fenofibrate 200mg generic order tricor 160mg pill
Edwardengat · August 15, 2023 at 7:48 am
https://certifiedcanadapharm.store/# reliable canadian pharmacy
JeffreyAlone · August 15, 2023 at 8:00 am
клиент покердом
https://ru.wikipedia.org/wiki/%D0%9A%D0%B0%D0%BD%D0%BA%D1%80%D0%B8%D0%BD,_%D0%95%D0%B3%D0%BE%D1%80_%D0%A4%D1%80%D0%B0%D0%BD%D1%86%D0%B5%D0%B2%D0%B8%D1%87
Скачать клиент на ПК ? это как взять с собой кусочек казино, где бы вы ни находились. Играйте, наслаждайтесь и пусть каждый спин барабанов будет вашим личным приключением. Покердом Казино приглашает вас в мир, где вы становитесь героем своей собственной истории выигрышей.PokerDom Casino ? это больше, чем просто игровая платформа. Это оазис для тех, кто ищет уникальное сочетание азарта и возможности сорвать крупный куш. Ваш путь к удаче начинается здесь, на официальном сайте Покердом Казино. Здесь вы сможете играть онлайн в слоты на реальные деньги, ощущая волнение каждого спина барабанов, как готовый палец над клавишей.
Turigogy · August 15, 2023 at 9:05 am
how to properly write time in an essay algebra 2 homework help how to write a good this i believe essay
AlbertMus · August 15, 2023 at 9:28 am
online shopping pharmacy india: buy prescription drugs from india – top 10 pharmacies in india
DonaldDoota · August 15, 2023 at 9:39 am
pokerdom
https://wikipedia.tel/%D0%92%D0%B0%D1%80%D0%B2%D0%B0%D1%80%D0%B0_(%D0%BF%D0%B5%D0%B2%D0%B8%D1%86%D0%B0)
Так что, если вы ищете место, где можно скачать и играть онлайн в слоты на реальные деньги, не задумываясь выбирайте PokerDom Casino. Мы ? дом азарта, где удача становится вашей союзницей, а выходные превращаются в настоящий праздник азарта и веселья!Наша команда сделает все возможное, чтобы ваше время проведенное в PokerDom Casino было незабываемым. Мы ценим каждого игрока и гарантируем конфиденциальность и безопасность ваших данных. Наша служба поддержки всегда готова прийти вам на помощь и ответить на все вопросы.
Marianep · August 15, 2023 at 9:43 am
Благодаря 3d металлическая печать , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Dianna · August 15, 2023 at 9:48 am
Nicely voiced without a doubt! !
Peterautor · August 15, 2023 at 10:25 am
Демонтаж стен Москва
Демонтаж стен Москва
CraigTed · August 15, 2023 at 11:17 am
доставка бетона дубна
Stevenhef · August 15, 2023 at 11:28 am
cat casino бонус коды
https://metrologu.ru/profile/133467-jejet/
Когда вы играете в Cat Casino, вы не просто спинаете барабаны, вы погружаетесь в атмосферу настоящего азарта. Здесь каждый вращение приносит ощущение настоящей жизни, где каждый риск — это шанс на большой выигрыш. С Cat Casino каждый может стать героем своего собственного казино-романа, где главные герои — это вы и ваши азартные мечты.На Cat Casino, Кэт Казино, вас ждет не только увлекательный игровой процесс, но и щедрые бонусы. Мы знаем, как важно чувствовать себя желанным, и поэтому Cat Casino приготовил для вас множество приятных сюрпризов. Уникальные бонусы, бесплатные спины и множество других возможностей увеличить свой выигрыш — все это ждет вас на Cat Casino.
Generate Money Online · August 15, 2023 at 12:54 pm
I do not even know how I ended up here, but I thought this post was
great. I do not know who you are but definitely you’re going to a famous blogger
if you aren’t already 😉 Cheers!
Stevenhef · August 15, 2023 at 1:10 pm
cat casino играть
http://www.detki-v-setke.ru/index.php?showuser=18709
Cat Casino – это не просто казино, это твой верный путь к удаче и развлечению. Не упустите свой шанс попробовать себя в роли счастливчика с Cat Casino, Кэт Казино. Скачай игровые автоматы и окунись в мир азарта прямо сейчас!Скачайте волнение, загрузите эмоции и отправьтесь в незабываемое путешествие по миру Cat Casino, где каждый миг может стать вашим ключом к сокровищам азарта. Насладитесь этой игрой на полную катушку, ведь Cat Casino — это где рождаются победители, а Кэт Казино — ваш верный проводник в мир развлечений!
Shawnkeene · August 15, 2023 at 1:23 pm
http://agkshina.ru/
Marianep · August 15, 2023 at 1:30 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать медицина для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
ChrisDed · August 15, 2023 at 1:38 pm
Подъем деревянного дома — технический процесс, позволяющий адаптировать здание к новым условиям, поднять его для замены фундамента или ремонта фундаментных элементов. ремонт старого фундамента
generic viagra · August 15, 2023 at 2:03 pm
canadian pharmacies price online pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Stevenhef · August 15, 2023 at 2:50 pm
код на казино cat casino
https://illustrators.ru/users/tilapow/about
Не хотите скачивать? Не проблема! Cat Casino также предоставляет вам возможность играть онлайн, не загружая ничего на свое устройство. Просто пройдите регистрацию на официальном сайте, и вы окажетесь в виртуальной реальности Кэт Казино, где каждый клик мыши может повернуть ваш мир вверх дном.Играть онлайн на Cat Casino так же легко, как и дышать. Просто зайдите на официальный сайт, и вас ожидает мир азарта, готовый поразить вас своим разнообразием. С Cat Casino, каждая минута превращается в мгновение удовольствия, каждая ставка — в шанс на удачу. Не упустите возможность погрузиться в мир кардинально новых впечатлений вместе с Cat Casino.
clean_viess · August 15, 2023 at 3:22 pm
https://cleanfox.ru
RogerguB · August 15, 2023 at 3:28 pm
Работа в Кемерово
generic viagra · August 15, 2023 at 3:52 pm
canada online pharmacies canadian mail order pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
HectorMak · August 15, 2023 at 4:04 pm
You actually suggested it adequately!
professional obituary writing service best essay writing service 2018 reddit note writing service
Stevenhef · August 15, 2023 at 4:23 pm
cat casino онлайн
http://forum.rost-okna.ru/reklama-na-forume/igrat-onlajn-besplatno/
Ощути магию азарта в каждом вращении барабана. Cat Casino – это не просто место, где можно играть в игровые автоматы, это мир, который оживает с каждым кликом. Каждый слот – это история, которая разворачивается перед твоими глазами, и ты можешь стать ее главным героем.На Cat Casino, Кэт Казино, вас ждет не только увлекательный игровой процесс, но и щедрые бонусы. Мы знаем, как важно чувствовать себя желанным, и поэтому Cat Casino приготовил для вас множество приятных сюрпризов. Уникальные бонусы, бесплатные спины и множество других возможностей увеличить свой выигрыш — все это ждет вас на Cat Casino.
Stevenhef · August 15, 2023 at 4:35 pm
игра cat casino
https://roads.ru/forum/profile/60906-rekekal419/?tab=field_core_pfield_13
Добро пожаловать на карнавал азарта и веселья — Cat Casino, где игра становится истинным искусством развлечения! Если вам нужно скачать уникальные игровые автоматы и погрузиться в мир волнения и возможностей, то Кэт Казино готово стать вашим верным спутником в этом захватывающем путешествии.Каждое посещение Cat Casino становится незабываемым путешествием в мир азарта и веселья. Наше казино — это место, где сходятся страсть и высокий класс. Cat Casino — это не просто игровая платформа, это настоящий хранилище впечатлений и эмоций. Ведь в Cat Casino, каждая партия превращается в момент истины, где можно испытать настоящий азарт и стать победителем.
Williamdease · August 15, 2023 at 5:18 pm
reputable indian pharmacies [url=https://indiamedicine.world/#]mail order pharmacy india[/url] indian pharmacy
generic viagra · August 15, 2023 at 5:52 pm
discount online canadian pharmacy pharmacy review Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Peterautor · August 15, 2023 at 6:03 pm
Демонтаж стен Москва
Демонтаж стен Москва
BarbaraDer · August 15, 2023 at 6:15 pm
catcasino
http://www.figarohair.ru/conf/viewtopic.php?f=5&t=4260
Cat Casino — это не просто казино, это настоящий калейдоскоп радости и увлечения. В 2023 году мы подготовили для вас новые игровые автоматы, которые впечатляют своей оригинальностью. Наши дизайнеры работали над каждым автоматом, чтобы дарить вам незабываемые визуальные впечатления. Здесь вы найдете не только стандартные слоты, но и уникальные игры, спроектированные специально для Cat Casino. Мы гордимся своим разнообразием и можем уверенно сказать, что у нас есть игры для каждого вкуса и настроения.Скачать игровые автоматы на Cat Casino — это как открыть сундук с сокровищами у древнего пирата. Кэт Казино дарит вам этот ключ к виртуальной роскоши, который вас унесет в мир ярких красок и звуков, мир, где каждый барабан может стать вашим верным спутником. От бескрайних просторов космоса до забытых храмов древних цивилизаций, каждая игра на Cat Casino — это отдельная история, написанная специально для вас.
visit here · August 15, 2023 at 6:43 pm
Hi there it’s me, I am also visiting this web page regularly, this site is
in fact fastidious and the users are genuinely sharing nice thoughts.
BarbaraDer · August 15, 2023 at 8:00 pm
cat casino промокоды 2023
https://www.openstreetmap.org/user/mafokaf
Cat Casino предоставляет широкий выбор игровых автоматов – от классических до современных, от простых до сложных. Каждый слот – это уникальный мир, где сокровища ждут своего обладателя. Скачай игровые автоматы на свое устройство и окунись в океан разнообразия и волнения.Добро пожаловать на официальный портал азартных развлечений 2023 года — Cat Casino, лучшее место для тех, кто ищет возможность скачать игровые автоматы и насладиться их разнообразием, играя онлайн! Откройте двери в захватывающий мир азарта вместе с Кэт Казино, где каждый спин барабанов — это шанс поймать удачу за хвост и потрясти её до последней фишки.
klinika_Gox · August 15, 2023 at 8:07 pm
лечение алкоголизма https://lechenie-alkogolizma-klinika.ru/
Marianep · August 15, 2023 at 8:52 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать капролоном для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
newyork lawyer · August 15, 2023 at 9:13 pm
I’ve read a few excellent stuff here. Definitely price bookmarking for revisiting.
I surprise how much effort you put to make any such great informative web
site.
generic viagra · August 15, 2023 at 9:30 pm
online medicine to buy buy canadian online pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
BarbaraDer · August 15, 2023 at 9:39 pm
казино cat коды
http://korabley.net/forum/100-2180-1
Казино это как джунгли, где только сильнейший выживает, и на Cat Casino вам предстоит стать главным охотником за джекпотами. Каждый спин барабанов — это как стрела, выпущенная в сердце леса, никогда не зная, что ждет вас на другом конце стрелы. Cat Casino предоставляет вам шанс разгадать тайны азарта и собрать свою коллекцию невероятных выигрышей.Cat Casino – это не просто казино, это твой верный путь к удаче и развлечению. Не упустите свой шанс попробовать себя в роли счастливчика с Cat Casino, Кэт Казино. Скачай игровые автоматы и окунись в мир азарта прямо сейчас!
BarbaraDer · August 15, 2023 at 11:06 pm
cat casino бонус коды
http://cs-online.ru/forum/index.php?showtopic=3039
Как скачать Cat Casino и начать веселье на полную катушку? Процесс установки наше приложение на ваше устройство быстр и прост. За считанные минуты вы будете готовы к захватывающим приключениям наших игровых автоматов. А для тех, кто не хочет загружать ничего дополнительно, предлагаем вариант игры онлайн, прямо на нашем сайте. С Cat Casino играть в любимые азартные игры становится ещё удобнее.Добро пожаловать в удивительный мир азартных развлечений — Cat Casino, парадоксальное слияние элегантности и азарта. В этом 2023 году, Cat Casino стал бесспорным героем азартной индустрии, обещая незабываемые впечатления и бесконечное веселье. На Cat Casino, Кэт Казино вас ждет множество возможностей, будь вы опытный азартный игрок или новичок, только начинающий свой путь в мире карточных столов и игровых автоматов.
Robertjoymn · August 15, 2023 at 11:15 pm
http://certifiedcanadapharm.store/# canadian medications
BarbaraDer · August 15, 2023 at 11:18 pm
казино cat коды
http://www.autoriginal.com.ua/forum/members/bomog.html
Cat Casino — это не просто казино, это путь к невероятным приключениям и неожиданным сюрпризам. Скачайте наше приложение или играйте онлайн — выбор за вами. Но одно остается неизменным: Cat Casino всегда готово порадовать вас своими уникальными играми, яркой графикой и захватывающим азартом. Встречайте 2023 год вместе с Cat Casino и станьте частью легенды азартного мира!С Cat Casino вы получаете билет в мир, где каждый может стать Кэтом на крыше мира. Мы готовы подарить вам больше, чем просто игры. Это место, где каждый может стать частью истории азартных приключений, где ваше имя запомнится как главный герой барабанов.
generic viagra · August 15, 2023 at 11:42 pm
online medication pharmacy buy canadian online pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Marianep · August 16, 2023 at 12:23 am
Благодаря 3d печать поликарбонатом в минске , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
BoecVcmefinnagt · August 16, 2023 at 12:38 am
Тут вы всегда можете быстро и безопасно [url=https://skachat-minecraft.biz/]скачать Майнкрафт[/url].
Freddyhex · August 16, 2023 at 2:34 am
ed meds online canada: canadian drug pharmacy – buy prescription drugs from canada cheap
daachka.ru · August 16, 2023 at 2:43 am
It’s not my first time to pay a visit this website, i am visiting this website dailly and take nice data from here daily.
Mariatah · August 16, 2023 at 3:10 am
игра cat casino
https://www.tapatalk.com/groups/dzerjinsky/viewtopic.php?f=6&t=11912&p=32331&hilit=казино#p32331
Cat Casino — это не просто казино, это настоящий калейдоскоп радости и увлечения. В 2023 году мы подготовили для вас новые игровые автоматы, которые впечатляют своей оригинальностью. Наши дизайнеры работали над каждым автоматом, чтобы дарить вам незабываемые визуальные впечатления. Здесь вы найдете не только стандартные слоты, но и уникальные игры, спроектированные специально для Cat Casino. Мы гордимся своим разнообразием и можем уверенно сказать, что у нас есть игры для каждого вкуса и настроения.Добро пожаловать на официальный портал азартных развлечений 2023 года — Cat Casino, лучшее место для тех, кто ищет возможность скачать игровые автоматы и насладиться их разнообразием, играя онлайн! Откройте двери в захватывающий мир азарта вместе с Кэт Казино, где каждый спин барабанов — это шанс поймать удачу за хвост и потрясти её до последней фишки.
attestati_viess · August 16, 2023 at 3:11 am
сколько купить аттестаты https://shkolnie-attestati.ru/
Peterautor · August 16, 2023 at 3:58 am
Демонтаж стен Москва
Демонтаж стен Москва
khammi8 · August 16, 2023 at 4:27 am
Hi there to all, how is the whole thing, I think every one
is getting more from this site, and your views are
nice in favor of new visitors.
generic viagra · August 16, 2023 at 4:41 am
viagra online canadian pharmacy online medication pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Mariatah · August 16, 2023 at 4:55 am
игровые автоматы cat casino
http://7sky.eu/forum/memberlist.php?mode=viewprofile&u=28499
Не хотите скачивать? Не проблема! Cat Casino также предоставляет вам возможность играть онлайн, не загружая ничего на свое устройство. Просто пройдите регистрацию на официальном сайте, и вы окажетесь в виртуальной реальности Кэт Казино, где каждый клик мыши может повернуть ваш мир вверх дном.Скачать игровые автоматы с официального сайта Cat Casino – это твой билет в мир невероятных приключений и шанс на солидные выигрыши. Насладись увлекательным процессом игры, почувствуй дыхание удачи на своем лице. Мы знаем, как сделать игровой процесс неповторимым, как подарить тебе незабываемые моменты азарта.
HectorMak · August 16, 2023 at 5:25 am
You mentioned that exceptionally well.
ucas personal statement writing service essay writing help custom essay writing service toronto
Edwardengat · August 16, 2023 at 5:26 am
http://certifiedcanadapharm.store/# canada pharmacy online
daa4a.ru · August 16, 2023 at 6:00 am
Hey there, You have done an excellent job. I will definitely digg it and personally recommend to my friends. I am sure they will be benefited from this site.
Mariatah · August 16, 2023 at 6:37 am
бонус код для казино cat
https://tihonow.ru/viewtopic.php?id=2334
Особенностью Cat Casino является возможность скачать в 2023 году уникальное приложение, погрузиться в виртуальное казино в любое удобное для вас время. С Cat Casino, ваше устройство станет горячей точкой азартного влечения. Забудьте о скучных моментах ожидания — с Cat Casino, мир игры всегда в вашем кармане, готовый подарить азарт и адреналин, когда бы вы ни пожелали.Играть онлайн на Cat Casino так же легко, как и дышать. Просто зайдите на официальный сайт, и вас ожидает мир азарта, готовый поразить вас своим разнообразием. С Cat Casino, каждая минута превращается в мгновение удовольствия, каждая ставка — в шанс на удачу. Не упустите возможность погрузиться в мир кардинально новых впечатлений вместе с Cat Casino.
Jamesdup · August 16, 2023 at 7:11 am
Discover the finest [url=https://nicotine-pouches.online/]nicotine pouch brands[/url] and savor a world of unique taste and quality!
AlbertMus · August 16, 2023 at 7:13 am
best rated canadian pharmacy: canadian pharmacy victoza – canadian pharmacy near me
Marianep · August 16, 2023 at 7:36 am
Благодаря 3d печать гипсополимер , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Mariatah · August 16, 2023 at 8:08 am
cat casino регистрация на сайте
https://www.noob-club.ru/index.php?topic=57661.0
Особенностью Cat Casino является возможность скачать в 2023 году уникальное приложение, погрузиться в виртуальное казино в любое удобное для вас время. С Cat Casino, ваше устройство станет горячей точкой азартного влечения. Забудьте о скучных моментах ожидания — с Cat Casino, мир игры всегда в вашем кармане, готовый подарить азарт и адреналин, когда бы вы ни пожелали.Играть онлайн на Cat Casino так же легко, как и дышать. Просто зайдите на официальный сайт, и вас ожидает мир азарта, готовый поразить вас своим разнообразием. С Cat Casino, каждая минута превращается в мгновение удовольствия, каждая ставка — в шанс на удачу. Не упустите возможность погрузиться в мир кардинально новых впечатлений вместе с Cat Casino.
Mariatah · August 16, 2023 at 8:20 am
код на казино cat casino
http://compmaster.mybb.ru/viewtopic.php?id=2331
Cat Casino предоставляет широкий выбор игровых автоматов – от классических до современных, от простых до сложных. Каждый слот – это уникальный мир, где сокровища ждут своего обладателя. Скачай игровые автоматы на свое устройство и окунись в океан разнообразия и волнения.Играть онлайн на Cat Casino так же легко, как и дышать. Просто зайдите на официальный сайт, и вас ожидает мир азарта, готовый поразить вас своим разнообразием. С Cat Casino, каждая минута превращается в мгновение удовольствия, каждая ставка — в шанс на удачу. Не упустите возможность погрузиться в мир кардинально новых впечатлений вместе с Cat Casino.
Angelvor · August 16, 2023 at 9:30 am
Megawin: Situs Terbaik Bermain Judi Online Mega Win Terpercaya di Indonesia
Dunia perjudian online semakin berkembang pesat di era digital ini. Salah satu situs yang telah mendapatkan reputasi sebagai pilihan terbaik untuk bermain judi online adalah Megawin. Dalam artikel ini, kita akan menjelajahi apa yang membuat Megawin begitu istimewa dan mengapa ia dianggap sebagai situs terpercaya di Indonesia.
Tentang Megawin
Megawin adalah platform judi online yang menawarkan berbagai jenis permainan, dengan fokus utama pada judi slot. Platform ini telah meraih status sebagai situs terbaik untuk bermain judi online Mega Win terpercaya di Indonesia. Salah satu faktor yang membuat Megawin menonjol adalah izin resmi dan lisensinya yang diperoleh melalui PAGCOR, sebuah badan regulasi perjudian internasional yang berbasis di Filipina. Lisensi ini menunjukkan komitmen Megawin untuk memberikan pengalaman bermain yang aman, adil, dan terpercaya kepada para pemainnya.
Ragam Permainan
Salah satu daya tarik utama Megawin adalah beragamnya pilihan permainan judi online yang ditawarkan. Terutama, Mega Win, permainan andalan mereka, telah berhasil menarik perhatian banyak pemain. Dari slot klasik hingga slot video modern dengan fitur-fitur inovatif, Megawin memiliki semua jenis permainan untuk memenuhi selera bermain setiap individu. Pemain dapat menikmati pengalaman bermain yang menarik dan menghibur tanpa henti, sepanjang hari dan malam.
Kenyamanan Bermain 24/7
Salah satu aspek menarik lainnya dari Megawin adalah kenyataan bahwa pemain dapat menikmati permainan mereka tanpa batasan waktu. Dengan layanan 24 jam tanpa henti, Megawin memastikan bahwa penggemar judi online dapat merasakan sensasi bermain kapan saja mereka inginkan. Ini adalah fitur yang sangat berharga bagi para pemain yang memiliki jadwal sibuk atau mungkin berada di berbagai zona waktu.
Responsible Gaming
Megawin juga sangat peduli dengan keamanan dan kesejahteraan para pemainnya. Mereka menerapkan prinsip bermain bertanggung jawab dan menyediakan sumber daya untuk membantu pemain mengelola aktivitas perjudian mereka. Dengan adanya fitur pengaturan batas permainan dan dukungan untuk pemain yang mungkin mengalami masalah perjudian, Megawin berkomitmen untuk menciptakan lingkungan bermain yang sehat dan aman bagi semua orang.
Kesimpulan
Megawin telah membuktikan dirinya sebagai pilihan terbaik bagi para pencinta judi online di Indonesia. Dengan lisensi resmi, beragam permainan menarik, layanan bermain 24/7, dan fokus pada permainan bertanggung jawab, Megawin telah memenuhi harapan pemainnya. Apakah Anda seorang penggemar judi slot atau mencari pengalaman judi online yang menyenangkan, Megawin adalah tempat yang patut dipertimbangkan. Jangan ragu untuk menjelajahi dunia judi online dengan aman dan menghibur di Megawin.
BarbaraAlled · August 16, 2023 at 9:58 am
gama casino онлайн
https://hrv-club.ru/forums/index.php?autocom=gallery&req=si&img=4553
Опыт, который Gama Casino предоставляет своим игрокам, можно сравнить с уникальным исследованием. Как путешественник, вы шагаете по тропинкам разнообразных игр, где каждая ставка — это шаг к новым горизонтам. Гама Казино становится вашим проводником в этом азартном путешествии.Gama Casino — это не просто игорная площадка, это ворота в мир, где реальность переплетается с виртуальным, а азарт со стратегией. Откройте для себя настоящий калейдоскоп разнообразных игр, представленных на страницах Гама Казино. У нас вы найдете игровые автоматы, способные увлечь вас в незабываемое путешествие по миру азарта.
Lestermeefe · August 16, 2023 at 10:07 am
https://kostjatitov68.nethouse.ru/posts/pereshiv-shuby-iz-norki-f1
Peterautor · August 16, 2023 at 10:23 am
Демонтаж стен Москва
Демонтаж стен Москва
generic viagra · August 16, 2023 at 11:01 am
pharmacy review canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Lestermeefe · August 16, 2023 at 11:03 am
https://sanjazaharov4.nethouse.ru/posts/mehovoe-atel-e-moskva-uxn
Lestermeefe · August 16, 2023 at 11:05 am
https://kostjatitov68.nethouse.ru/posts/mexamoskvichka-ru-jmva
BarbaraAlled · August 16, 2023 at 11:43 am
gama casino официальный сайт
http://tumgerl.rolbb.me/viewtopic.php?id=8981
Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.И не забывайте, что Гама Казино – это не только игровые автоматы, это целый мир развлечений. Блэкджек, покер, рулетка – каждая игра как аккорд в мелодии вашего азартного вечера. Gama Casino – это как волшебная палитра, на которой каждый ход становится штрихом в вашем произведении.
JamesCrype · August 16, 2023 at 11:44 am
официальный сайт Cat Casino
narcolog_rhymn · August 16, 2023 at 11:46 am
нарколог на дом цена москва https://narcolog-na-dom-msk.ru/
DavidAsteT · August 16, 2023 at 12:13 pm
世界盃
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
DavidAsteT · August 16, 2023 at 12:31 pm
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
Lestermeefe · August 16, 2023 at 1:19 pm
https://sanjazaharov4.nethouse.ru/posts/mehovoe-atel-e-moskva-xho
BarbaraAlled · August 16, 2023 at 1:25 pm
gama casino онлайн
https://www.symbaloo.com/shared/AAAABHIeatMAA41_lfdPbA==
Игровые автоматы в России принимают новое измерение с Gama Casino. Взлетайте вместе с нами на вершину азартных впечатлений, где каждая ставка — это шанс доказать свое превосходство. Гама Казино дарит вам множество вариантов, чтобы сделать ваш путь к победе уникальным и неповторимым.Широкий ассортимент игровых автоматов, представленных на Gama Casino, словно открывает карту сокровищ: каждая игра – это ключ к новому миру призов и увлекательных историй. Гама Казино готово предоставить вам билет в мир азартных приключений, где вы сможете доказать свое мастерство и сорвать внушительный куш.
JosephApego · August 16, 2023 at 1:29 pm
https://kwork.ru/links/1017228/progon-khrumerom
[url=https://grammarsolution.com/mportant-synonyms-in-english-find-similar-words-in-english/#comment-586890]kjhgfrf[/url] 27759f0
DavidAsteT · August 16, 2023 at 1:56 pm
世界盃籃球、
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
IHRalphtix · August 16, 2023 at 2:00 pm
Игровые автоматы на 5000 кредитов онлайн
https://takelagniki.ru
А вы готовы к сражению с фортуной? Игровые автоматы на 5000 кредитов – это ваша арена, ваше поле битвы, где каждый бросок барабанов подарит вам адреналин и волнение. Прочувствуйте на себе весь магнетизм риска, научитесь раскрывать стратегии и воплощать тактики, чтобы одержать верх над машиной.Свобода выбора – ваш главный компаньон в игре на игровых автоматах на 5000 кредитов. Онлайн-формат позволяет вам играть тогда, когда вам удобно, без ограничений по времени и местоположению. Вы сами создаете атмосферу – будь то домашний уют или азартный коктейль в кафе.
generic viagra · August 16, 2023 at 2:17 pm
cheap medications cheap medications Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
JosephApego · August 16, 2023 at 2:26 pm
Заказать прогон хрумером
[url=https://cestovatel.cz/f/topic/gultekin-ben/#post-599446]kjhgfrf[/url] af1_73f
DavidAsteT · August 16, 2023 at 2:27 pm
2023年FIBA世界盃籃球賽,也被稱為第19屆FIBA世界盃籃球賽,將成為籃球歷史上的一個重要里程碑。這場賽事是自2019年新制度實行後的第二次比賽,帶來了更多的期待和興奮。
賽事的參賽隊伍涵蓋了全球多個地區,包括歐洲、美洲、亞洲、大洋洲和非洲。此次賽事將選出各區域的佼佼者,以及2024年夏季奧運會主辦國法國,共計8支隊伍將獲得在巴黎舉行的奧運賽事的參賽資格。這無疑為各國球隊提供了一個難得的機會,展現他們的實力和技術。
在這場比賽中,我們將看到來自不同文化、背景和籃球傳統的球隊們匯聚一堂,用他們的熱情和努力,為世界籃球迷帶來精彩紛呈的比賽。球場上的每一個進球、每一次防守都將成為觀眾和球迷們津津樂道的話題。
FIBA世界盃籃球賽不僅僅是一場籃球比賽,更是一個文化的交流平台。這些球隊代表著不同國家和地區的精神,他們的奮鬥和拼搏將成為啟發人心的故事,激勵著更多的年輕人追求夢想,追求卓越。 https://telegra.ph/觀看-2023-年國際籃聯世界杯-08-16
BarbaraAlled · August 16, 2023 at 2:58 pm
казино gama войти
https://forum.trapeza.ru/viewtopic.php?f=17&t=144812
Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.Приветствуем вас в мире уникальных азартных возможностей – Gama Casino! Это не просто портал, это калейдоскоп впечатлений, ждущих своего исследователя. Гама Казино – это не просто онлайн площадка, это врата в измерение бескрайних развлечений, магия которых окутывает каждого посетителя.
BarbaraAlled · August 16, 2023 at 3:10 pm
казино gama online
http://web-lance.net/forums.php?m=posts&q=19707
Игровые автоматы в России принимают новое измерение с Gama Casino. Взлетайте вместе с нами на вершину азартных впечатлений, где каждая ставка — это шанс доказать свое превосходство. Гама Казино дарит вам множество вариантов, чтобы сделать ваш путь к победе уникальным и неповторимым.Gama Casino — это не просто платформа для азартных игр, это легендарное место, где ваша мечта об игре на рубли сливается с реальностью. Чувствуйте ритм азарта в каждом клике, ведь Гама Казино откроет перед вами дверь в увлекательный мир азартных развлечений.
JosephApego · August 16, 2023 at 3:21 pm
Заказать прогон сайта
[url=http://www.xn--new-dr3mu47c1mfv51a.com/bbs/board.php?bo_table=qna&wr_id=410744]kjhgfrf[/url] 145dba8
JosephApego · August 16, 2023 at 4:16 pm
Прогон хрумером
[url=https://freshforum.aqualogo.ru/gallery/image/728-%D0%B0%D1%80%D0%BE%D0%B2%D0%B0%D0%BD%D0%B0/?page=4314&tab=comments#comment-109923]kjhgfrf[/url] 59f0baf
DavidAsteT · August 16, 2023 at 4:23 pm
玩運彩:體育賽事與娛樂遊戲的完美融合
在現代社會,運彩已成為一種極具吸引力的娛樂方式,結合了體育賽事的激情和娛樂遊戲的刺激。不僅能夠享受體育比賽的精彩,還能在賽事未開始時沉浸於娛樂遊戲的樂趣。玩運彩不僅提供了多項體育賽事的線上投注,還擁有豐富多樣的遊戲選擇,讓玩家能夠在其中找到無盡的娛樂與刺激。
體育投注一直以來都是運彩的核心內容之一。玩運彩提供了眾多體育賽事的線上投注平台,無論是NBA籃球、MLB棒球、世界盃足球、美式足球、冰球、網球、MMA格鬥還是拳擊等,都能在這裡找到合適的投注選項。這些賽事不僅為球迷帶來了觀賽的樂趣,還能讓他們參與其中,為比賽增添一份別樣的激情。
其中,PM體育、SUPER體育和鑫寶體育等運彩系統商成為了廣大玩家的首選。PM體育作為PM遊戲集團的體育遊戲平台,以給予玩家最佳線上體驗為宗旨,贏得了全球超過百萬客戶的信賴。SUPER體育則憑藉著CEZA(菲律賓克拉克經濟特區)的合法經營執照,展現了其合法性和可靠性。而鑫寶體育則以最高賠率聞名,通過研究各種比賽和推出新奇玩法,為玩家提供無盡的娛樂。
玩運彩不僅僅是一種投注行為,更是一種娛樂體驗。這種融合了體育和遊戲元素的娛樂方式,讓玩家能夠在比賽中感受到熱血的激情,同時在娛樂遊戲中尋找到輕鬆愉悅的時光。隨著科技的不斷進步,玩運彩的魅力將不斷擴展,為玩家帶來更多更豐富的選擇和體驗。無論是尋找刺激還是尋求娛樂,玩運彩都將是一個理想的選擇。 https://champer8.com/
Viagra Pills · August 16, 2023 at 4:24 pm
Viagra Online Canada discount online canadian pharmacy Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
IHRalphtix · August 16, 2023 at 4:34 pm
Игровые автоматы на 5000 кредитов онлайн
https://takelagniki.ru
В мире слотов на 5000 кредитов нет места скучным моментам. Каждый автомат – это отдельная история, сокрытая за барабанами и символами. Перенеситесь в мир волшебства и загадок, где драконы могут стать вашими союзниками, а сокровища – целью, достойной подлинного авантюриста.А вы готовы к сражению с фортуной? Игровые автоматы на 5000 кредитов – это ваша арена, ваше поле битвы, где каждый бросок барабанов подарит вам адреналин и волнение. Прочувствуйте на себе весь магнетизм риска, научитесь раскрывать стратегии и воплощать тактики, чтобы одержать верх над машиной.
JosephApego · August 16, 2023 at 5:11 pm
прогон по форумам
[url=https://ibdhotels.com/2016/09/18/news-from-us-from-now/#comment-7490]kjhgfrf[/url] 6b99277
Grace · August 16, 2023 at 5:24 pm
Amazing content, Thanks a lot.
частный эромассаж в Москве · August 16, 2023 at 5:27 pm
Недорогой частный эротический массаж Москва с сауной
DavidAsteT · August 16, 2023 at 5:48 pm
世界盃籃球、
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
Viagra Price per Pill · August 16, 2023 at 6:10 pm
Viagra 100Mg Online Uk canadian pharmacy viagra generic Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
bobroAlish · August 16, 2023 at 6:36 pm
На сайте https://feringer.shop вы сможете заказать печи для бань, саун и другую качественную продукцию. Все конструкции поставляются напрямую от завода FERINGER и по доступной цене. Облицовка всех конструкций произведена из натурального камня самых разных пород, а потому конструкции выглядят невероятно презентабельно и органично. Компания регулярно расширяет ассортимент с учетом требований, пожеланий заказчиков. С каждым годом их становится все больше. Специалисты дадут консультации, помогут с выбором и выполнят замеры.
Billiegep · August 16, 2023 at 6:44 pm
gama casino играть бесплатно
http://skodarapidclub.ru/forum/showthread.php?p=1407681
Сознательно ли вы готовы войти в удивительное виртуальное путешествие, которое предлагает вам Gama Casino? Забудьте о рутине, давайте окунемся в мир, где страсть к азарту переплетается с безграничными возможностями! Добро пожаловать на борт официального сайта, который открывает двери в захватывающее онлайн казино на русском языке. Добро пожаловать в Гама Казино!Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.
HectorMak · August 16, 2023 at 6:51 pm
Appreciate it. Lots of info!
finance essay writing service will writing service gravesend music essay writing
fniselTaura · August 16, 2023 at 7:09 pm
На сайте https://jj-life.ru/beremennost-i-rody/vrednye-privychki-i-beremennost-kakovy-posledstviya.html ознакомьтесь с интересной статьей о вредных привычках и их влиянием на беременность, а также о возможных последствиях. Вредные привычки, такие как курение, употребление алкоголя и употребление наркотиков, являются особенно опасными и могут иметь серьезные последствия для будущего ребенка.
Двери · August 16, 2023 at 7:09 pm
[url=https://magazin-dverej-v-sankt-peterburge.ru/]Дверной магазин[/url]
Да мы с тобой делаем отличное предложение для вас сильнее 11 тыс. дверей (а) также дверной фурнитуры в течение нашем бутике на сайте интернет.
Дверной магазин
emenoKit · August 16, 2023 at 7:15 pm
На сайте https://play.google.com/store/apps/details?id=com.matchfan2323 вы сможете сделать свои ставки в БК «Леон» и в режиме онлайн. С этой компанией каждое спортивное мероприятие будет более интересным, увлекательным и завораживающим. Здесь можно сделать ставки на баскетбол, футбол, хоккей, а также различные редкие спортивные соревнования. И самое важное, что для этого необходимо лишь скачать приложение, интерфейс которого идентичен официальному сайту. Чтобы сделать ставки, нет необходимости выходить из дома.
omochLox · August 16, 2023 at 7:28 pm
На сайте https://xn—-7sbbhfai6cgwcewu4mwb.xn--p1ai/ оставьте номер телефона для того, чтобы с вами связались для заказа услуг похоронного дома. Вы сможете выбрать полный пакет услуг, в том числе, кремацию. В компании работают высококлассные, профессиональные специалисты, которые окажут вам поддержку, дадут все необходимые рекомендации и выполнят все так, как нужно. Цены остаются доступными. Здесь же вы сможете воспользоваться услугами крематория. В случае смерти близкого человека сразу звоните по указанному телефону, чтобы вам оказали помощь.
Viagra Prices · August 16, 2023 at 7:57 pm
Viagra 100 Mg Price canadian drugs without prescription Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
электросамокат · August 16, 2023 at 8:08 pm
[url=https://kugoo-max-speed-600w.ru/]Kugoo Max Speed[/url]
Самокат Kugoo Max Briskness – это новый эрзац-продукт на базаре для людей, кои страдают длинное и еще удобное ятси присутствия в движении. Спирт предначертан чтобы долгой езды и предельной силы, чтоб ваша милость имели возможность получать сегодняшний день ферза от езды сверху самокате.
Kugoo Max Speed
IHRalphtix · August 16, 2023 at 8:09 pm
слоты на 5000 кредитов
Игровые автоматы на 5000 кредитов онлайн
Что делает наши слоты на 5000 кредитов такими привлекательными? Во-первых, это множество вариантов для ставок, позволяющих вам контролировать свой игровой процесс. Начните с небольших ставок и постепенно увеличивайте их, чувствуя азарт победы на каждом шагу. Во-вторых, уникальные бонусные раунды и функции в игровых автоматах на 5000 кредитов придают игре неповторимый характер. Каждый спин – это возможность активировать режим бесплатных вращений или дополнительных уровней, где вы сможете увеличить свои выигрыши в несколько раз.Игровые автоматы на 5000 кредитов – это не только шанс попытать удачу, но и возможность укрепить свои навыки. Здесь каждый спин – это урок, где вы учитесь читать игровое поле, анализировать шансы, искать закономерности. Слоты на 5000 кредитов станут настоящим тренажером для вашего азартного интеллекта.
achevVok · August 16, 2023 at 8:19 pm
На сайте https://vehrrxcso.ru вы сможете сыграть в самые интересные и увлекательные игры: Dice, Mines, Bubbles, Wheel, Plinko и другие. Это ваша возможность не только получить больше положительных и приятных эмоций, а также сорвать неплохой куш. Пополнить счет или вывести средства вы сможете прямо сейчас. Для того чтобы найти подходящую игру, необходимо обозначить название в поиске. Воспользуйтесь возможностью получить до 100 рублей бонусов каждый день. Делайте свои ставки и выигрывайте!
Двери · August 16, 2023 at 8:29 pm
[url=https://magazin-dverej-v-sankt-peterburge.ru/]Дверной магазин[/url]
Мы делаем отличное предложение вам более 11 тысяч дверей равно дверный фурнитуры в течение нашем торговом центре на сайте интернет.
Дверной магазин
Billiegep · August 16, 2023 at 8:30 pm
gama casino играть
https://boi.instgame.pro/forum/index.php?action=profile;u=7988
Сознание готово к волнующему приключению, ведь теперь вы стоите перед порталом в захватывающий мир развлечений — Gama Casino, мечтающем оказаться в вашей компании! Для тех, кто жаждет влиться в азартный поток, открывается врата настоящего азартного рая – официальный сайт Gama Casino. Гама Казино приглашает вас в пленительное путешествие по бескрайним просторам азартных удовольствий.Опыт, который Gama Casino предоставляет своим игрокам, можно сравнить с уникальным исследованием. Как путешественник, вы шагаете по тропинкам разнообразных игр, где каждая ставка — это шаг к новым горизонтам. Гама Казино становится вашим проводником в этом азартном путешествии.
NEVADA FAKE ID · August 16, 2023 at 9:12 pm
Can I simply just say what a comfort to discover someone who actually knows what they are talking about on the net.
You certainly realize how to bring an issue to light
and make it important. More and more people ought to read this
and understand this side of the story. I was surprised that you’re not more popular given that
you surely possess the gift.
IHRalphtix · August 16, 2023 at 9:52 pm
Игровые автоматы на 5000 кредитов онлайн
https://takelagniki.ru
Как только вы окунетесь в мир наших игровых автоматов на 5000 кредитов, вы оцените разнообразие тематик и увлекательных сюжетов, которые мы подготовили для вас. От классических фруктовых тем до захватывающих приключений в древних цивилизациях — у нас есть слоты на 5000 кредитов для всех любителей азартных игр. Каждый спин открывает перед вами мир невероятных возможностей и неожиданных поворотов событий.Свобода выбора – ваш главный компаньон в игре на игровых автоматах на 5000 кредитов. Онлайн-формат позволяет вам играть тогда, когда вам удобно, без ограничений по времени и местоположению. Вы сами создаете атмосферу – будь то домашний уют или азартный коктейль в кафе.
Billiegep · August 16, 2023 at 10:15 pm
gama casino вход
https://www.artstation.com/user-2835836/profile
Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.Приветствуем вас в виртуальном убежище азартных удовольствий — Gama Casino! Это не просто портал развлечений, это истинная сокровищница игровых наслаждений, доступных вам в любой уголок земного шара. Да, вы правильно услышали, здесь вы сможете найти вход на официальный сайт Гама Казино, который откроет перед вами дверь в захватывающий мир азарта и страстных ставок!
Williamdease · August 16, 2023 at 10:47 pm
canadian pharmacy oxycodone [url=http://certifiedcanadapharm.store/#]reliable canadian pharmacy reviews[/url] safe canadian pharmacy
электросамокат · August 16, 2023 at 10:51 pm
[url=https://kugoo-max-speed-600w.ru/]Kugoo Max Speed[/url]
Электросамокат Kugoo Max Briskness – этто новый продукт на рынке для людишек, что питать нежные чувства долгое а также удобное время пребывания в движении. Он предназначен чтобы длительной езды (а) также наибольшей силы, чтоб вы имели возможность приобретать настоящее удовольствие через езды сверху самокате.
Kugoo Max Speed
BoecVcmdfinnagt · August 16, 2023 at 11:04 pm
Тут вы всегда можете быстро и удобно [url=https://skachat-minecraft1.info/]скачать Майнкрафт[/url].
IHRalphtix · August 16, 2023 at 11:30 pm
Игровые автоматы на 5000 кредитов онлайн
https://takelagniki.ru
Погрузитесь в уникальную атмосферу наших игровых автоматов на 5000 кредитов. Здесь каждый вращающийся барабан приносит с собой шанс выигрыша огромного джекпота! Неважно, старожил вы виртуальных казино или новичок – наши слоты на 5000 кредитов просты в использовании, но при этом обладают невероятной глубиной и множеством интересных особенностей.Загляните в захватывающий мир онлайн-развлечений, где игровые автоматы на 5000 кредитов станут вашим ключом к невероятным приключениям! Бросьте вызов обыденности и окунитесь в виртуальное азартное путешествие, полное неожиданных поворотов и драйва. Наши слоты на 5000 кредитов готовы подарить вам бескрайний космос развлечений – и все это онлайн, без лишних заморочек с регистрацией.
Viagra Online Cheap · August 16, 2023 at 11:42 pm
Viagra Pills from Canada canadian rx pharmacy online Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Billiegep · August 16, 2023 at 11:49 pm
казино gama войти
http://www.dhe-nlp.ru/forum/index.php?showuser=13842
И так, дорогие друзья, добро пожаловать в Gama Casino — место, где рождаются легенды, а каждый Гама Казино игрок может стать главным героем своей собственной истории. Приготовьтесь к вращению барабанов, потому что здесь рождаются победители!Приветствуем вас в мире уникальных азартных возможностей – Gama Casino! Это не просто портал, это калейдоскоп впечатлений, ждущих своего исследователя. Гама Казино – это не просто онлайн площадка, это врата в измерение бескрайних развлечений, магия которых окутывает каждого посетителя.
Billiegep · August 17, 2023 at 12:01 am
gama casino играть бесплатно
https://darkmarket.cx/threads/prodazha-i-razrabotka-onlajn-kazino.40769/
На страницах Gama Casino вы сможете играть бесплатно и наслаждаться моментом, пока удача раскрывает перед вами свои карты. Это не просто онлайн-казино, это гавань для тех, кто ценит азарт и комфорт. Гама Казино откроет вам двери в мир, где реальность переплетается с виртуальностью, а вы становитесь хозяином собственной удачи.Почувствуйте волнение, ощутите эмоции, проникнув в самое ядро азартной страсти, доступное вам на официальном сайте Gama Casino. Мы приглашаем вас в наш мир, где каждая партия — это событие, а каждый спин — это шанс изменить свою судьбу. Станьте частью Гама Казино и откройте для себя новые горизонты азартных развлечений!
IHRalphtix · August 17, 2023 at 1:02 am
Игровые автоматы на 5000 кредитов
Игровые автоматы на 5000 кредитов онлайн
Загляните в захватывающий мир онлайн-развлечений, где игровые автоматы на 5000 кредитов станут вашим ключом к невероятным приключениям! Бросьте вызов обыденности и окунитесь в виртуальное азартное путешествие, полное неожиданных поворотов и драйва. Наши слоты на 5000 кредитов готовы подарить вам бескрайний космос развлечений – и все это онлайн, без лишних заморочек с регистрацией.Но давайте не забудем о самой главной фишке — 5000 кредитов! Это не просто цифры на экране, это ваш билет к крупным выигрышам и захватывающим приключениям. Каждый раз, когда вы запускаете игровой автомат на 5000 кредитов, вы стоите на пороге увлекательного путешествия, где удача может улыбнуться вам в любой момент. Рискуйте, ставьте и выигрывайте — именно так работает наш уникальный мир азарта и развлечений!
vasenneony · August 17, 2023 at 1:13 am
На сайте https://aptekamos.ru/ вы сможете отыскать и заказать редкие лекарства в Краснодаре. Отыщите ближайшие аптеки, в которых установлены привлекательные расценки. Закажите все, что необходимо, чтобы забрать в аптеке около дома и в наиболее комфортное время. Также есть телефоны, а также адреса ближайших аптек. Для того чтобы найти подходящее решение, просто вбейте название средства в поисковую строку. Вы также можете найти аптеки с круглосуточным обслуживанием. Также есть и свежие новости, с которыми необходимо ознакомиться и вам.
IHRalphtix · August 17, 2023 at 1:14 am
слоты на 5000 кредитов
Игровые автоматы на 5000 кредитов онлайн
Что делает наши слоты на 5000 кредитов такими привлекательными? Во-первых, это множество вариантов для ставок, позволяющих вам контролировать свой игровой процесс. Начните с небольших ставок и постепенно увеличивайте их, чувствуя азарт победы на каждом шагу. Во-вторых, уникальные бонусные раунды и функции в игровых автоматах на 5000 кредитов придают игре неповторимый характер. Каждый спин – это возможность активировать режим бесплатных вращений или дополнительных уровней, где вы сможете увеличить свои выигрыши в несколько раз.Игровые автоматы на 5000 кредитов – это не только шанс на выигрыш, но и возможность испытать настоящее волнение и эмоции. Будьте готовы к неожиданным поворотам событий, ведь каждый спин может принести вам удачу, которую вы так долго искали.
canadian pharmacy 2023 · August 17, 2023 at 1:33 am
Viagra Tablet approved canadian pharmacies Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Edwardengat · August 17, 2023 at 1:54 am
http://mexpharmacy.sbs/# medication from mexico pharmacy
Marianep · August 17, 2023 at 2:08 am
Благодаря 3d печать в металле , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
Freddyhex · August 17, 2023 at 2:24 am
online pharmacy india: indianpharmacy com – world pharmacy india
khonoMalia · August 17, 2023 at 2:55 am
По ссылке https://play.google.com/store/apps/details?id=com.one1.l1ne сделайте ставки в БК «Фонбет». Считается одной из самых востребованных контор, которая находится на территории России. Интерфейс портала комфортный, простой, что позволяет быстро его понять и разобраться, чтобы поставить на определенное состязание. Каждого игрока ожидают бонусы, а также огромный выбор линий, мобильное приложение. Все это является достоинствами компании, которая постоянно радует постоянных пользователей.
Business Visa Online · August 17, 2023 at 3:19 am
Highly descriptive post, I liked that a lot.
Will there be a part 2?
BetBoom_viess · August 17, 2023 at 3:35 am
Бет Бум: ставки на бокс
inogratup · August 17, 2023 at 4:22 am
На сайте https://waltzprof.com/ закажите стальной профиль в огромном ассортименте. Он создается на высокотехнологичном, современном оборудовании, которое позволяет получить тот результат, который необходимо. Вы сможете заказать все, что нужно и независимо от количества. Стальной профиль можно приобрести для самых разных целей. Если есть вопросы, то задайте их высококлассному менеджеру, который даст ценные советы. Для производства применяются только инновационные технологии, которые и дают возможность получить продукцию высокого уровня.
AlbertMus · August 17, 2023 at 4:54 am
reputable indian pharmacies: indianpharmacy com – indian pharmacy
net77 · August 17, 2023 at 5:05 am
Hello There. I found your blog using msn. This is a very well written article.
I’ll be sure to bookmark it and come back to read more of your useful
info. Thanks for the post. I’ll certainly return.
alechbok · August 17, 2023 at 5:10 am
По ссылке https://play.google.com/store/apps/details?id=com.LilBottle.BigSport совершите свои ставки в популярной, надежной БК «Леон», которая радует пользователей честными, прозрачными условиями, регулярными выплатами. Здесь огромный выбор дисциплин, поэтому не составит труда подобрать то, что нужно. Теперь все события станут более зрелищными, интересными и удивительными. Перед вами широкая роспись для спортивных состязаний различного уровня. Делайте свои ставки, не выходя из дома!
stasiJem · August 17, 2023 at 6:04 am
Как подготовиться к перелету? На этот вопрос ответит полноценная статья https://j-man.ru/otdyx/kak-podgotovitsya-k-pereletu.html на сайте. Вы узнаете, что необходимо сделать, чтобы распланировать свои действия заранее для того, чтобы перелет прошел в удовольствие и получить впечатления, а не раздражение. Статья ответит на все ваши вопросы, в которой вы узнаете много нового для себя.
AnnieEming · August 17, 2023 at 6:11 am
gama casino
http://forum.omnicomm.pro/index.php/topic,10637.0.html
Так что, смело ступайте на порог Gama Casino! Вас ждут бескрайние азартные просторы, словно пустыни, раскинувшиеся перед оазисом игр. Помните, что Гама Казино – это не просто место для игры, это место, где ваша удача примет вас широким жестом, словно старого друга.Играя в Гама Казино, вы обнаружите, что это не просто место для испытания удачи. Это космос, где каждый спин на игровых автоматах — это возможность покорить вершину джекпота. Каждая мелодия, каждая крупье, словно созданы, чтобы погрузить вас в атмосферу истинного казино.
negirnow · August 17, 2023 at 7:01 am
На сайте https://somovo-mebel.ru/ вы сможете приобрести качественную, надежную, функциональную мебель из массива самых разных пород дерева. Для вас действует оперативная доставка, а также профессиональная сборка при помощи соответствующего оборудования, инвентаря. Вся мебель отличается уникальным и эксклюзивным дизайном. Она безупречного качества, поэтому не изменит своего внешнего вида. На всю продукцию дается гарантия 2 года. В компании изготавливают красивую, стильную корпусную мебель для спален, гостиных.
Robertdar · August 17, 2023 at 7:53 am
чистка лица у косметолога механическая цена
AnnieEming · August 17, 2023 at 8:00 am
gama casino онлайн
https://tihonow.ru/viewtopic.php?id=4728
Игровые автоматы в России набирают обороты благодаря Gama Casino. Наша платформа собрала в себе богатство игровых вариаций — от традиционных классических слотов до передовых трехмерных автоматов. Это как путешествие во времени, где вы можете выбрать, с какой эпохой вы хотите встретиться, и Гама Казино сделает всё остальное.Гама Казино — это не просто бескрайний океан азартных игр. Это ваша судьба, которая в ваших руках. Насладитесь непередаваемыми ощущениями, играя в игровые автоматы, представленные на страницах Gama Casino. Мир азарта в России открывает свои объятия перед вами.
Briancon · August 17, 2023 at 8:07 am
supermoney88
HectorMak · August 17, 2023 at 8:17 am
Nicely put, Thank you!
essay writing service quora has anyone used essay writing services powerpoint writing service
cheapest car insurance quotes · August 17, 2023 at 9:23 am
Hello, i think that i saw you visited my site so i came to “return the favor”.I
am trying to find things to enhance my web site!I suppose its ok to use a few of your ideas!!
Here is my web page … cheapest car insurance quotes
AnnieEming · August 17, 2023 at 9:49 am
казино gama casino
http://probox-club.ru/forums/index.php?autocom=gallery&req=si&img=3958
Gama Casino — это не просто игорная площадка, это ворота в мир, где реальность переплетается с виртуальным, а азарт со стратегией. Откройте для себя настоящий калейдоскоп разнообразных игр, представленных на страницах Гама Казино. У нас вы найдете игровые автоматы, способные увлечь вас в незабываемое путешествие по миру азарта.Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.
ScottHaist · August 17, 2023 at 10:29 am
https://u-sity.net/uslugi/215035-debetovaya-karta-mir-kak-oformit-v-sberbanke.html
Josephodoni · August 17, 2023 at 10:55 am
Банкротство физических лиц в Москве – довольно сложная процедура. В данной статье вам помогут разобраться как грамотно и эффективно провести данную процедуру https://www.aoinform.com/news/osnovnye_osobennosti_bankrotstva_fizicheskikh_lic/2023-07-01-58531 Опытные юристы с большим стажем помогут освободиться от кредитных обязательств.
Andrewswags · August 17, 2023 at 11:09 am
africanownews.com
lininwaype · August 17, 2023 at 11:19 am
На сайте https://arendabk.ru подберите комфортную, удобную бытовку, которая идеально подходит для временного проживания работников, осуществляющих строительные работы на территории. Специально для вас лучшие условия и выгодные цены. С той целью, чтобы заказать бытовку, вам требуется только позвонить по обозначенному телефону. Также можно просто оставить заявку на сайте. Большой выбор бытовок позволит подобрать вариант с учетом заданных характеристик, особенностей. С компанией работают не только компании, но и частные лица.
AnnieEming · August 17, 2023 at 11:25 am
казино gama casino
https://www.openstreetmap.org/user/pkazofb
Gama Casino — это не просто игорная площадка, это ворота в мир, где реальность переплетается с виртуальным, а азарт со стратегией. Откройте для себя настоящий калейдоскоп разнообразных игр, представленных на страницах Гама Казино. У нас вы найдете игровые автоматы, способные увлечь вас в незабываемое путешествие по миру азарта.Мы понимаем, что каждый игрок уникален, как отпечаток пальца, поэтому в Gama Casino вы найдете игры, специально отобранные для тех, кто стремится к большему. Гама Казино — это ваш путь к невероятным эмоциям и уникальным победам.
AnnieEming · August 17, 2023 at 11:38 am
gama casino вход
http://portal.krasno.ru/viewtopic.php?f=28&t=56112
Сознательно ли вы готовы войти в удивительное виртуальное путешествие, которое предлагает вам Gama Casino? Забудьте о рутине, давайте окунемся в мир, где страсть к азарту переплетается с безграничными возможностями! Добро пожаловать на борт официального сайта, который открывает двери в захватывающее онлайн казино на русском языке. Добро пожаловать в Гама Казино!Приветствуем вас в мире уникальных азартных возможностей – Gama Casino! Это не просто портал, это калейдоскоп впечатлений, ждущих своего исследователя. Гама Казино – это не просто онлайн площадка, это врата в измерение бескрайних развлечений, магия которых окутывает каждого посетителя.
Robertjoymn · August 17, 2023 at 12:12 pm
https://mexpharmacy.sbs/# reputable mexican pharmacies online
efimostodo · August 17, 2023 at 1:25 pm
На сайте https://blablatxt.ru/ вы сможете получить всю самую интересную, полезную и любопытную информацию на различную тематику. Есть исчерпывающие статьи на тему битвы протоколов, установки различного программного обеспечения. Имеются и рецепты полезных ужинов на каждый день. Вы узнаете о том, что можно приготовить для повседневного меню. Имеются и эффективные способы создания масок для чистой и сияющей кожи. Регулярно появляются новые статьи, которые ответят на многочисленные вопросы.
ScottHaist · August 17, 2023 at 2:28 pm
https://npkid.com/servis-bankiros/
semincob · August 17, 2023 at 2:38 pm
На сайте http://www.tribal-tattoo.ru запишитесь на такую востребованную услугу, как создание татуировки. В салоне «TRIBAL TATTOO» работают высококлассные, компетентные мастера, которые в работе учитывают ваши пожелания, требования. Именно поэтому в результате вы получите именно то, на что рассчитывали – яркое, изысканное и привлекательное изображение. Мастер применяет только проверенные, качественные материалы, высокотехнологичное оборудование, которое позволяет получить нужный эффект.
Самсон · August 17, 2023 at 3:22 pm
https://zamena-ventsov-doma.ru
lazinotup · August 17, 2023 at 5:01 pm
Не знаете, как правильное питание может помочь с сухостью кожи? Статья https://klub-drug.ru/kak-pravilnoe-pitanie-mozhet-pomoch-v-borbe-s-suhostju-kozhi/ ответит на все вопросы. Простые советы от эксперта помогут вам сделать кожу здоровой, сияющей, ухоженной. Избавиться от сухости и шелушения кожи очень легко.
Marianep · August 17, 2023 at 5:06 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать скульптур для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
bogdacaupt · August 17, 2023 at 5:41 pm
На сайте https://xn--80abaorehqgfh7cb0d7c.xn--p1ai/ скачайте заявку для того, чтобы записаться на курсы учебно-курсового комбината, института повышения квалификации. Компания существует на рынке более 30 лет. За это время удалось выпустить более 400 000 выпускников. В компании работает несколько десятков преподавателей. Из всего многообразия курсов вы сможете выбрать тот, который вам подойдет больше всего в соответствии со специализацией, направленностью. Оставьте заявку на обучение.
casino_viess · August 17, 2023 at 5:57 pm
Когда я впервые посетил Cat Casino, я был поражен его разнообразием и качеством игр. Официальный сайт предлагает простой и интуитивно понятный интерфейс, что делает вход в Cat Casino легким и удобным. Я нашел множество захватывающих слотов, классических карточных игр и живых казино. Бонусная программа Cat Casino также впечатлила меня – щедрые приветственные пакеты и регулярные акции. Я наслаждаюсь каждым моментом игры в Cat Casino!
Больше на сайте https://jlrconnect.ru/
potolkiuages · August 17, 2023 at 6:13 pm
[url=https://potolkiuages.dp.ua/type-ceilings/stili-natyazhnyh-potolkov/natyazhnye-potolki-v-stile-barokko/]potolkiuages.dp.ua/type-ceilings/stili-natyazhnyh-potolkov/natyazhnye-potolki-v-stile-barokko/[/url]
Торговля а также энергоустановка натяжных потолков через производителя. Шаровый замер да рендеринг дизайна.
potolkiuages.dp.ua/natyazhnye-potolki-ukraine/natyazhnye-potolki-v-primorsk/
duardalobe · August 17, 2023 at 6:14 pm
На сайте https://himchistka-kovrov-kaluga.ru/ вы сможете оставить заявку для того, чтобы воспользоваться услугой чистки ковров в Калуге. Если вы не можете посетить компанию лично, то за ковром приедет курьер, заберет его, а затем привезет обратно. Компания находится на рынке 4 года, за которые заполучила огромный опыт, постоянных клиентов. Ознакомьтесь со всеми работами прямо сейчас. Эту компанию выбирают по той причине, что здесь всегда дают гарантию на работы, а пенсионерам предоставляется скидка. Действуют привлекательные расценки.
korchhop · August 17, 2023 at 7:40 pm
На сайте https://intimateplasty.ru/ запишитесь на консультацию к пластическому хирургу Лешунову Евгению Викторовичу, который является выдающимся доктором. Он выполняет операции как женщинам, так и мужчинам. А в своей работе он применяет уникальные, продвинутые технологии, чтобы вы получили тот результат, который нужен. Доктор осматривает пациента и делает выводы о том, в каких местах необходимо внести коррективы. Евгений Викторович проводит операции на лице, ягодицах, в интимной области, на груди, животе. Это позволит вам радоваться своему отражению.
Viagra Pill · August 17, 2023 at 8:12 pm
Viagra Price in Usa canadian pharmaceuticals online safe Health Canada guarantee the safety and authenticity of these medications, providing consumers with peace of mind. Embracing the online avenue for
Marianep · August 17, 2023 at 8:45 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать керамикой в минске для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
potolkiuages · August 17, 2023 at 8:48 pm
[url=https://potolkiuages.dp.ua/natyazhnye-potolki-ukraine/natyazhnye-potolki-v-nikopol/]potolkiuages.dp.ua/natyazhnye-potolki-ukraine/natyazhnye-potolki-v-nikopol/[/url]
Продажа а также установка натяжных потолков от производителя. Бесплатный промер а также рендеринг дизайна.
potolkiuages.dp.ua/type-ceilings/potolki-s-krivolinejnoj-spajkoj/
bestrapeporn · August 17, 2023 at 9:28 pm
It’s going to be end of mine day, except before finish I am reading this impressive article to increase my experience.
DavidAsteT · August 17, 2023 at 10:04 pm
世界盃
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
HectorMak · August 17, 2023 at 10:12 pm
Fantastic tips. Many thanks!
essay writing service affordable will writing service essex writing to customer service
pragmatic play · August 17, 2023 at 10:31 pm
Hello there! This post couldn’t be written any better!
Reading this post reminds me of my previous room mate! He always kept talking about
this. I will forward this page to him. Pretty
sure he will have a good read. Thanks for sharing!
demyaShuts · August 17, 2023 at 10:34 pm
На сайте https://lyubercy.monolith-beton.ru/ вы сможете заказать бетон в любом объеме. Компания является не только надежным поставщиком такого строительного материала, но и бизнес-партнером, который поставляет только качественную продукцию. Она давно находится на рынке, а потому знает обо всех тонкостях ведения бизнеса. Гарантируется безупречное качество продукции, оперативные поставки. К каждому клиенту практикуется индивидуальный подход. Воспользуйтесь калькулятором бетона, чтобы рассчитать стоимость проекта.
dentitox pro review · August 17, 2023 at 10:35 pm
Aw, this was a really good post. Spending some time and actual effort to make
a very good article… but what can I say… I hesitate a lot and
never seem to get anything done.
Accident Attorney · August 17, 2023 at 10:45 pm
Hi there, I enjoy reading through your article. I like to write
a little comment to support you.
Edwardengat · August 17, 2023 at 10:46 pm
http://indiamedicine.world/# pharmacy website india
stellazhi_crelt · August 17, 2023 at 10:49 pm
паллетные стеллажи от производителя
BoecVkrdfinnagt · August 17, 2023 at 11:23 pm
Тут вы всегда можете безопасно и удобно [url=https://skachat-minecraft1.net/]скачать Майнкрафт[/url].
FrankDorne · August 17, 2023 at 11:40 pm
There are times when a child 214rentals.com just cheats and this is not always a bad thing.
ityushaBat · August 18, 2023 at 12:07 am
На сайте http://htpps//luckyjet-pro.ru/ начните играть в популярную, яркую и интересную игру Lucky Jet. Это игра, которая предоставляет возможность сыграть на хорошие деньги, с растущими иксами, высокими, завидными выигрышами. Важным моментом является то, что вы сможете заработать отличные средства и получить массу приятных, положительных эмоций. А для того, чтобы игра стала более зрелищной, интересной и яркой, воспользуйтесь промокодом. Он даст возможность новому игроку значительно сэкономить. Эта игра основана исключительно на том, повезет ли вам в этот раз. Все, что нужно – просто пройти регистрацию и сделать ставку.
Marianep · August 18, 2023 at 12:21 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать ювелирных изделий для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
xnxx_Nuh · August 18, 2023 at 12:29 am
xnxx com full video
Williamdease · August 18, 2023 at 12:47 am
online shopping pharmacy india [url=https://indiamedicine.world/#]online shopping pharmacy india[/url] Online medicine home delivery
judi bola · August 18, 2023 at 1:13 am
Hi there, the whole thing is going fine here and ofcourse every one is sharing information, that’s actually fine,
keep up writing.
Freddyhex · August 18, 2023 at 2:33 am
buying from online mexican pharmacy: mexico drug stores pharmacies – mexico drug stores pharmacies
AlbertMus · August 18, 2023 at 2:47 am
legal canadian pharmacy online: canadian pharmacy meds – canadian pharmacy sarasota
Clement · August 18, 2023 at 3:22 am
She assumed it was dope. A sentence really should consist of no needless text, a paragraph no needless sentences, for the very same cause that a drawing ought to have no unneeded traces and a equipment no needless parts.
Also visit my page … https://Www.Mazafakas.com/user/profile/2723947
Ipjkyr · August 18, 2023 at 3:41 am
ketotifen brand ketotifen 1mg price order tofranil 75mg
lgandRurse · August 18, 2023 at 3:59 am
Website https://dncgames.com/ is a platform for exchanging game currency, items and accounts with the best prices. You will be able to buy or sell a game account on our platform. A large selection of accounts with many games will allow you to enjoy the process, and sellers will sell your account in good hands.
nfilovver · August 18, 2023 at 4:01 am
На сайте https://baseaudio.moscow/ вы сможете воспользоваться арендой, прокатом аудио оборудования. К примеру, шестиканальным профессиональным микшером для диджеев, акустической системой, которая дает чистый и красивый звук. Доставка, а также подключение техники происходит только при помощи специально обученного персонала. Ознакомьтесь с кейсами на сайте. В этой компании вы сможет арендовать и антивибрационные ножки, которые идеально подходят для виниловых проигрывателей. В комплекте 4 ножки.
Jamesfaisp · August 18, 2023 at 4:06 am
dublinnews365.com
evgenMexia · August 18, 2023 at 4:16 am
На сайте https://x2-sochi.ru/ вы сможете ознакомиться со всеми фешенебельными объектами недвижимости в Сочи. Важным моментом является то, что все сделки являются полностью безопасными. Вы сможете воспользоваться профессиональными консультациями менеджера. Отсутствуют комиссии при покупке недвижимости. Специалисты работают с покупателями, у которых самая разная кредитная история. У компании опыт работы более 5 лет, а потому она справится с задачей самого разного уровня. Вы сможете воспользоваться, в том числе, и эксклюзивными предложениями.
John#smith[Klouwnefzrtdibjka,2,5] · August 18, 2023 at 4:27 am
Discover the thrill of [url=https://velo1.store/order-snus-online-velo/]order snus online[/url] and explore a world of enticing flavors!
cheap cipro 1000 mg · August 18, 2023 at 5:22 am
cozaar united kingdom cozaar 100 mg cheap buy cozaar
Zacharynof · August 18, 2023 at 6:42 am
breakingnews77.com
antosmom · August 18, 2023 at 7:34 am
На сайте https://aviator2023.su/ сыграйте в интересную и увлекательную игру Aviator на деньги. Это инновационная и интересная многопользовательская игра на деньги. У нее очень необычный, увлекательный сюжет, который точно понравится всем, кто любит играть и выигрывать приличные деньги. Этот вид геймплея отличается тем, что он принципиально новый, а потому точно понравится каждому. У игрока появляется возможность увеличить свой депозит. Начать играть и получать от этого положительные эмоции вы сможете прямо сейчас.
Marianep · August 18, 2023 at 7:44 am
Благодаря 3d печать из металла на заказ , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
GroverMople · August 18, 2023 at 8:02 am
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
DavidAsteT · August 18, 2023 at 8:06 am
FIBA
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
DavidAsteT · August 18, 2023 at 8:14 am
世界盃籃球、
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
DavidAsteT · August 18, 2023 at 8:22 am
FIBA
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
DavidAsteT · August 18, 2023 at 8:27 am
FIBA
2023年的FIBA世界盃籃球賽(英語:2023 FIBA Basketball World Cup)是第19次舉行的男子籃球大賽,且現在每4年舉行一次。正式比賽於 2023/8/25 ~ 9/10 舉行。這次比賽是在2019年新規則實施後的第二次。最好的球隊將有機會參加2024年在法國巴黎的奧運賽事。而歐洲和美洲的前2名,以及亞洲、大洋洲、非洲的冠軍,還有奧運主辦國法國,總共8支隊伍將獲得這個機會。
在2023年2月20日FIBA世界盃籃球亞太區資格賽的第六階段已經完賽!雖然台灣隊未能參賽,但其他國家選手的精彩表現絕對值得關注。本文將為您提供FIBA籃球世界盃賽程資訊,以及可以收看直播和轉播的線上平台,希望您不要錯過!
主辦國家 : 菲律賓、印尼、日本
正式比賽 : 2023年8月25日–2023年9月10日
參賽隊伍 : 共有32隊
比賽場館 : 菲律賓體育館、阿拉內塔體育館、亞洲購物中心體育館、印尼體育館、沖繩體育館
Eero#metsa[Kiuwyfhzprhtnejla,2,5] · August 18, 2023 at 8:37 am
Nauti parhaasta [url=https://nikotiinipussi.store/]nikotiinipussit vahvuus[/url] -kokemuksesta valikoimassamme olevien laadukkaiden makujen parissa!
DavidAsteT · August 18, 2023 at 8:37 am
how to play stake plinko in us
Michaelindum · August 18, 2023 at 9:24 am
Of course, a high rating will fla-real-property.com contribute to the effective development of your business.
lenyajeask · August 18, 2023 at 9:30 am
На сайте https://zabor196.ru/ закажите заборы из ПВХ, которые отличаются огромным количеством преимуществ. К примеру, материал не подвержен гниению, ему не страшны перепады температуры, не теряет свой изначальный внешний вид очень долго. В этой компании вы сможете заказать любой вариант забора, независимо от формы и прочих моментов. И самое главное, что изделие обязательно впишется в общую концепцию. Расценки остаются на доступном уровне. Закажите востребованную услугу прямо сейчас.
VameNege · August 18, 2023 at 10:49 am
online viagra liquid viagra over the counter viagra cvs
DavidAsteT · August 18, 2023 at 11:22 am
промо казино
akimovCaf · August 18, 2023 at 11:26 am
На сайте https://liranimed.ru/ вы сможете оставить заявку на то, чтобы воспользоваться услугами патронажной службы. Она работает на официальных условиях и по договору. Вас обрадуют доступные цены – всего от 150 рублей в час. Первый выход сотрудника для клиента бесплатный. Вы сможете воспользоваться помощью менеджера в круглосуточном режиме. Вам ответят на все интересующие вопросы. Среди основных услуг выделяют: сиделка медсестра, сиделка с проживанием, в больницу, для лежачего больного. Все специалисты с большим опытом и соответствующим образованием.
HectorMak · August 18, 2023 at 11:34 am
Regards! Ample information!
professional research writing service buy essay online writing service professional resume writing service chattanooga tn
DavidAsteT · August 18, 2023 at 11:53 am
космолот 50 фриспинов
Oliver#smith[Yehwkurqbnjtzxpa,2,5] · August 18, 2023 at 11:56 am
Discover the art of [url=https://velo1.live/how-to-use-velo-snus/]how to use velo snus[/url] and explore a world of exciting flavors with our exclusive collection!
Josephodoni · August 18, 2023 at 12:03 pm
Банкротство физических лиц в Москве – https://academ.info/news/economy/39610/ подробная информация по процедуре.
rabotavkemerovobop · August 18, 2023 at 12:24 pm
Работа в Кемерово
komisdoord · August 18, 2023 at 12:43 pm
По ссылке https://play.google.com/store/apps/details?id=com.w1ndwaakers.ggg вы сможете попытать свою удачу и сыграть в популярное казино Вавада, где огромный выбор слотов, различных развлечений на самый притязательный вкус. Перед вами покер, игровые автоматы, баккара и многое другое. Кроме того, имеются и игры с живыми дилерами. Казино отличается наличием лицензии, которая гарантирует то, что казино работает официально, на прозрачных условиях. Это и является основой честной игры.
DavidAsteT · August 18, 2023 at 12:53 pm
приват казино
DavidAsteT · August 18, 2023 at 1:56 pm
體驗金
體驗金:線上娛樂城的最佳入門票
隨著科技的發展,線上娛樂城已經成為許多玩家的首選。但對於初次踏入這個世界的玩家來說,可能會感到有些迷茫。這時,「體驗金」就成為了他們的最佳助手。
什麼是體驗金?
體驗金,簡單來說,就是娛樂城為了吸引新玩家而提供的一筆免費資金。玩家可以使用這筆資金在娛樂城內體驗各種遊戲,無需自己出資。這不僅降低了新玩家的入場門檻,也讓他們有機會真實感受到遊戲的樂趣。
體驗金的好處
1. **無風險體驗**:玩家可以使用體驗金在娛樂城內試玩,如果不喜歡,完全不需要承擔任何風險。
2. **學習遊戲**:對於不熟悉的遊戲,玩家可以使用體驗金進行學習和練習。
3. **增加信心**:當玩家使用體驗金獲得一些勝利後,他們的遊戲信心也會隨之增加。
如何獲得體驗金?
大部分的線上娛樂城都會提供體驗金給新玩家。通常,玩家只需要完成簡單的註冊程序,然後聯繫客服索取體驗金即可。但每家娛樂城的規定都可能有所不同,所以玩家在領取前最好先詳細閱讀活動條款。
使用體驗金的小技巧
1. **了解遊戲規則**:在使用體驗金之前,先了解遊戲的基本規則和策略。
2. **分散風險**:不要將所有的體驗金都投入到一個遊戲中,嘗試多種遊戲,找到最適合自己的。
3. **設定預算**:即使是使用體驗金,也建議玩家設定一個遊戲預算,避免過度沉迷。
結語:體驗金無疑是線上娛樂城提供給玩家的一大福利。不論你是資深玩家還是新手,都可以利用體驗金開啟你的遊戲之旅。選擇一家信譽良好的娛樂城,領取你的體驗金,開始你的遊戲冒險吧!
RobertCug · August 18, 2023 at 2:03 pm
MAGNUMBET adalah merupakan salah satu situs judi online deposit pulsa terpercaya yang sudah popular dikalangan bettor sebagai agen penyedia layanan permainan dengan menggunakan deposit uang asli. MAGNUMBET sebagai penyedia situs judi deposit pulsa tentunya sudah tidak perlu diragukan lagi. Karena MAGNUMBET bisa dikatakan sebagai salah satu pelopor situs judi online yang menggunakan deposit via pulsa di Indonesia. MAGNUMBET memberikan layanan deposit pulsa via Telkomsel. Bukan hanya deposit via pulsa saja, MAGNUMBET juga menyediakan deposit menggunakan pembayaran dompet digital. Minimal deposit pada situs MAGNUMBET juga amatlah sangat terjangkau, hanya dengan Rp 25.000,-, para bettor sudah bisa merasakan banyak permainan berkelas dengan winrate kemenangan yang tinggi, menjadikan member MAGNUMBET tentunya tidak akan terbebani dengan biaya tinggi untuk menikmati judi online
Liam#thompson[Pwonyatqrbjxkhue,2,5] · August 18, 2023 at 2:44 pm
Discover the art of [url=https://velo1.gay/how-to-use-velo-nicotine-pouches/]how to use velo nicotine pouches[/url] and explore a world of exciting flavors with our exclusive collection!
enadiyKak · August 18, 2023 at 2:47 pm
На сайте https://cryoone.ru/ вы сможете заказать азотную криокапсулу от производителя. При этом доставка, установка, а также обучение сотрудников происходит представителями компании. На технику предоставляется гарантия 24 месяца. Оборудование есть как в наличии, так и под заказ. Стоимость указана вместе с НДС. Можно подобрать криокапсулу различной комплектации для комфорта ваших клиентов. В галерее ознакомьтесь с фотографиями, а также содержательными видеоматериалами, а также полезным статьями.
emenoevosy · August 18, 2023 at 2:54 pm
На сайте https://rostov-logist.ru/ ознакомьтесь с Ростовской школой логистики, которая занимается обучением и консультирование в области логистики и управлении цепями поставок. Мы проводим семинары, курсы, тренинги, мастер классы как для начинающих логистов, так и для профессионалов, которым необходимы новые знания. Все наши методики отработаны на практике и имеют своей целью приобретение максимальных знаний в области логистики и методики организации складских процессов в организациях.
diplom_viess · August 18, 2023 at 3:46 pm
купить диплом ссср московская область https://diplom-sssr.ru/
website development · August 18, 2023 at 4:11 pm
I really like what you guys are usually up too.
This sort of clever work and coverage! Keep up the awesome works guys I’ve
incorporated you guys to my personal blogroll.
genadmok · August 18, 2023 at 4:32 pm
На сайте https://perteq.ru вы сможете оформить заявку для того, чтобы осуществить поставки комплектующих, а также запчастей для производств. Компания уже долгое время не только поставляет запчасти, но и производит монтаж, установку, обслуживание, пуско-наладочные работы. Компетентные инженеры ответят на многочисленные вопросы, помогут с выбором. Перед вами огромный выбор позиций, что позволит выбрать вариант на любой вкус. Работа напрямую с производителем, а потому продукция безупречного качества, даются все необходимые гарантии.
Liam#thompson[Pwonyatqrbjxkhue,2,5] · August 18, 2023 at 4:46 pm
Explore the world of [url=https://velo1.gay/]velo pouch flavors[/url] and treat yourself to a premium collection of tantalizing flavors!
SuperFlix · August 18, 2023 at 5:19 pm
I really love your blog.. Excellent colors & theme. Did you develop this
web site yourself? Please reply back as I’m planning to create my
own personal blog and want to learn where you got this from or exactly what the theme is
called. Appreciate it!
postniJouby · August 18, 2023 at 5:34 pm
На сайте https://xn—-8sbaha6askwme1aq4i.xn--p1ai/ закажите обратный звонок для того, чтобы в компании вам помогли выкупить автомобиль за приличную сумму. Услуга оказывается как по Москве, так и области. Сотрудники компании рассматривают самые разные марки, модели автомобилей. Только для вас бесплатная оценка автомобиля, а также оперативный выезд, за который не нужно платить. Сделка оформляется абсолютно бесплатно. Рассчитываются наличными либо высылают средства непосредственно на карту. Обязательно составляется договор.
Davidt · August 18, 2023 at 6:07 pm
Explore the diverse world of [url=https://velo1.gay/]velo nicotine flavors[/url] for an exquisite and unique vaping experience!
Marianep · August 18, 2023 at 6:26 pm
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать по металлу для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
diplom_Nuh · August 18, 2023 at 7:13 pm
купить диплом о среднем профессиональном образовании https://diplom-o-srednem.ru/
yevgeChego · August 18, 2023 at 7:32 pm
На сайте https://iz-zala.ru/ вы сможете приобрести все для создания уютной, приятной обстановки, стильного и привлекательного интерьера: вешалки, интересные и оригинальные презенты, настольные лампы и многое другое. Вся продукция создана из качественных материалов, поэтому наделена долгим сроком эксплуатации, высоким качеством, надежностью. Из огромного ассортимента вы обязательно выберете такой вариант, который вас полностью устроит. Можно подобрать себе либо в качестве презента.
Edwardengat · August 18, 2023 at 7:35 pm
https://certifiedcanadapharm.store/# canadian pharmacy victoza
Unokynop · August 18, 2023 at 7:43 pm
tamoxifen causes cancer tamoxifen bone density 4 oht tamoxifen
DavidAsteT · August 18, 2023 at 8:20 pm
Assistencia Dell florianopolis
Assistência técnica Dell em Florianópolis – Pessoal qualificado para consertar seu notebook, com garantia. Mais de 22 anos de experiência. Assistencia dell, assistencia tecnica notebook, Conserto de Video Game
Albertpax · August 18, 2023 at 8:44 pm
покердом регистрация
https://lada-kalina.ru
Покердом – это уникальная платформа для любителей азарта и адреналина. На официальном сайте Pokerdom вы можете скачать и установить онлайн-клиент для ПК или мобильных устройств и получить доступ к разнообразным лицензионным играм на реальные деньги. Pokerdom – это не только покер-рум, но и онлайн-казино с множеством слотов, рулетки, блэкджека, баккары и других азартных развлечений. Вы можете играть как на виртуальные фишки, так и на рубли или другие валюты. Pokerdom – это также букмекерская контора, где вы можете делать ставки на спорт в режиме прематч или лайв. Вы можете выбирать из множества видов спорта и событий, а также получать высокие коэффициенты и быстрые выплаты. Pokerdom – это покер-рум для тех, кто ценит качество и удобство. Вы можете общаться с другими игроками в чате, получать поддержку от администрации сайта, а также участвовать в различных акциях и бонусах. Вы можете получать фрироллы, кэшбэк, бесплатные спины и многое другое. Вы можете повышать свой статус в лояльности клубе и получать еще больше привилегий и выгод. Pokerdom – это покер-рум для тех, кто любит азарт и хочет испытать свои навыки в соревновании с реальными соперниками. Скачайте клиент на официальном сайте Pokerdom и присоединяйтесь к миллионам игроков по всему миру!
JohnV · August 18, 2023 at 9:24 pm
Embark on a journey of taste with the exquisite [url=https://velo1.gay/]velo flavors[/url] for an unparalleled vaping experience!
Robertjoymn · August 18, 2023 at 9:52 pm
http://certifiedcanadapharm.store/# canadian pharmacy in canada
GeraldPriob · August 18, 2023 at 11:05 pm
If we are talking about companies greeceholidaytravel.com, the rating will be calculated after the third comment from users.
Wedrqd · August 18, 2023 at 11:39 pm
cialis pills buy sildenafil 50mg for sale buy sildenafil for sale
BoecVеrdfinnagt · August 18, 2023 at 11:41 pm
Здесь вы всегда можете безопасно и быстро [url=https://skachat-minecraft1.org/]скачать Майнкрафт[/url].
AlbertMus · August 19, 2023 at 12:33 am
mexican online pharmacies prescription drugs: mexico drug stores pharmacies – mexican drugstore online
Marianep · August 19, 2023 at 1:13 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать abs для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Williamdease · August 19, 2023 at 2:15 am
indian pharmacy online [url=http://indiamedicine.world/#]buy medicines online in india[/url] india online pharmacy
Freddyhex · August 19, 2023 at 2:33 am
ed meds online canada: legal canadian pharmacy online – safe canadian pharmacies
Richardcag · August 19, 2023 at 3:09 am
The service itself refers to a network protocol, which arizonawood.net in turn is the property of an organization that manages domain names, IP addresses for all sites and resources on the Internet.
olechduh · August 19, 2023 at 4:27 am
На сайте http://www.ideas4rent.ru вы сможете воспользоваться такой услугой, как аренда мебели, а также другой сопутствующей атрибутики, которая пригодится для различных мероприятий, в том числе, конференций. Вся мебель будет поставлена в минимальные сроки. Она полностью исправная, чистая, функциональная, а потому вы сможете выбрать вариант под свои цели. Огромный выбор решений на самый разный вкус. В разделе представлены стулья, трехместные диваны, кресла. Ознакомьтесь с последними проектами.
LelandOvaFt · August 19, 2023 at 4:42 am
английский курсы онлайн
Marianep · August 19, 2023 at 4:43 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать сайт для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Emma#smith[Jovixilomewob,2,5] · August 19, 2023 at 5:04 am
Discover a world of delightful [url=https://velo1.art/]velo pouches flavors[/url] that will tantalize your taste buds and leave you craving for more!
LelandOvaFt · August 19, 2023 at 5:14 am
онлайн курсы английского языка разговорного
JamesLek · August 19, 2023 at 5:25 am
https://yogicentral.science/wiki/User:MariamSteffen
Raidenempixelm · August 19, 2023 at 5:42 am
try this
JamesLek · August 19, 2023 at 5:45 am
http://www.heerfamily.net/mediawiki/index.php/%D0%98%D0%BC%D0%B5%D0%BD%D0%BD%D0%BE_%D0%9F%D0%BE%D1%8D%D1%82%D0%BE%D0%BC%D1%83_%D0%9C%D1%8B_%D0%97%D0%B0%D0%B1%D0%BE%D1%82%D0%B8%D0%BC%D1%81%D1%8F_%D0%9E_%D0%A2%D0%BE%D0%BC
LelandOvaFt · August 19, 2023 at 5:52 am
онлайн курсы на английском языке
JamesLek · August 19, 2023 at 6:24 am
https://dumbtwinks.com/index.php/User:Alphonse42U
JamesLek · August 19, 2023 at 6:45 am
https://oglaszam.pl/author/verlablackb/
HectorMak · August 19, 2023 at 7:04 am
Thanks, Useful information!
which is the best resume writing service [url=https://essaywritingservicehelp.com/]essay writing customers services[/url] best reviewed essay writing service [url=https://essaywritingservicebbc.com/]essay review service[/url] essay writing tutor report writing service [url=https://domyhomeworkformecheap.com/]do my statistics homework[/url] pay someone to do my homework [url=https://domycollegehomeworkforme.com/]online coursework[/url] should i do my homework or sleep
JamesLek · August 19, 2023 at 7:05 am
https://wiki.sports-5.ch/index.php?title=Utilisateur:FaustoThrossell
JamesSurge · August 19, 2023 at 7:35 am
http://insomniacanimations.com
JamesSurge · August 19, 2023 at 7:55 am
http://goalface.org
Bradleypooth · August 19, 2023 at 8:03 am
viking ice maker repair service san diego
Johnb · August 19, 2023 at 8:11 am
Discover the most amazing [url=https://velo1.gay/]best velo flavor[/url] options for a delightful experience you won’t forget!
Rodneydig · August 19, 2023 at 8:13 am
лизинг бу оборудования для юридических лиц
JamesSurge · August 19, 2023 at 8:16 am
http://dataentry-biz.com
Bradleypooth · August 19, 2023 at 8:34 am
frigidaire oven repair service san diego
JamesSurge · August 19, 2023 at 8:36 am
http://regan-pravo.ru
Rodneydig · August 19, 2023 at 8:43 am
https://ofkleasing.ru/
klimovfuh · August 19, 2023 at 8:51 am
На сайте https://play.google.com/store/apps/details?id=com.LilBottle.BigSport вы сможете сделать ставки в БК «Леон». Ее основали в 2011 году, а сейчас считается одной из самых востребованных. К важным преимуществам бренда относят то, что у него хорошая линия, а интерфейс мобильного приложения достаточно простой в понимании, поэтому воспользоваться и разобраться в нем сможет каждый. Предусмотрены ставки, в том числе, с нулевой маржой. Имеется и блог с прогнозами. Вы тоже сможете воспользоваться этим сайтом для того, чтобы заработать побольше денег.
ConradKal · August 19, 2023 at 8:55 am
https://humanlove.stream/wiki/User:CamillaVidler7
Bradleypooth · August 19, 2023 at 9:09 am
rossmoor appliance repair
Rodneydig · August 19, 2023 at 9:15 am
получить оборудование в лизинг
ConradKal · August 19, 2023 at 9:16 am
http://wiki.quanticsystems.com.br/index.php/%D0%AE%D1%80%D0%B8%D0%B4%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B0%D1%8F_%D0%9A%D0%BE%D0%BD%D1%81%D1%83%D0%BB%D1%8C%D1%82%D0%B0%D1%86%D0%B8%D1%8F_%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_9111_Ru_2
ConradKal · August 19, 2023 at 9:37 am
https://www.revawaste.eu/question/%d0%bc%d0%b5%d0%b4%d0%b8%d1%86%d0%b8%d0%bd%d1%81%d0%ba%d0%b0%d1%8f-%d0%bc%d0%b5%d0%b1%d0%b5%d0%bb%d1%8c-%d0%b8-%d0%be%d0%b1%d0%be%d1%80%d1%83%d0%b4%d0%be%d0%b2%d0%b0%d0%bd%d0%b8%d0%b5/
Rodneydig · August 19, 2023 at 9:45 am
лизинг станков и оборудования
Bradleypooth · August 19, 2023 at 9:45 am
wolf oven repair service san diego
ConradKal · August 19, 2023 at 9:56 am
https://unitedindia.info/forums/topic/%d0%bf%d0%be%d1%87%d0%b5%d0%bc%d1%83-%d1%81%d1%82%d0%be%d0%b8%d1%82-%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7%d0%b0%d1%82%d1%8c-%d0%bb%d0%b0%d0%b1%d0%be%d1%80%d0%b0%d1%82%d0%be%d1%80%d0%bd%d0%be%d0%b5/
Leonardowems · August 19, 2023 at 10:06 am
http://www.heerfamily.net/mediawiki/index.php/%D0%9C%D0%B5%D0%B4%D0%B8%D1%86%D0%B8%D0%BD%D1%81%D0%BA%D0%BE%D0%B5_%D0%9E%D0%B1%D0%BE%D1%80%D1%83%D0%B4%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5_%D0%A6%D0%B5%D0%BD%D0%B0_%D0%9C%D0%B5%D0%B4%D0%B8%D1%86%D0%B8%D0%BD%D1%81%D0%BA%D0%BE%D0%B9_%D0%A2%D0%B5%D1%85%D0%BD%D0%B8%D0%BA%D0%B8_%D0%9E%D1%82_%D0%9F%D1%80%D0%BE%D0%B8%D0%B7%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8F_2
Peteredige · August 19, 2023 at 10:20 am
https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=327385
Bradleypooth · August 19, 2023 at 10:21 am
furnace repair in san diego ca
Leonardowems · August 19, 2023 at 10:36 am
http://nswiki.svenskasuperserier.se/w/index.php?title=Anv%C3%A4ndare:ChanaGabbard
Peteredige · August 19, 2023 at 10:40 am
https://daefrica.kr/bbs/board.php?bo_table=free&wr_id=12
Jameso · August 19, 2023 at 10:56 am
Explore the exciting world of [url=https://nicotine-pouches.store/gb/en/store-locator/]Nicotine pouch shop near me[/url] and discover unique flavors that will elevate your experience!
Peteredige · August 19, 2023 at 11:01 am
http://www.naracaps.co.kr/naracaps/bbs/board.php?bo_table=free&wr_id=3614
Leonardowems · August 19, 2023 at 11:06 am
http://vulteevaliant.com/index.php/User:MurielWheatley6
Peteredige · August 19, 2023 at 11:21 am
https://tekwiki.launchph.com/index.php/User:DenisGabriele0
work from home jobs · August 19, 2023 at 11:29 am
Good article. I’m dealing with a few of these issues as well..
Leonardowems · August 19, 2023 at 11:37 am
https://wiki.aea3.xyz/index.php?title=User:LesleyBcm963
Peteredige · August 19, 2023 at 11:42 am
http://xn--mf0b113an7b30b58lolb.kr/bbs/board.php?bo_table=naver_blog_rss&wr_id=198378
Leonardowems · August 19, 2023 at 12:08 pm
https://www.recruiterwiki.de/%D0%9C%D0%B5%D0%B4%D0%B8%D1%86%D0%B8%D0%BD%D1%81%D0%BA%D0%BE%D0%B5_%D0%9E%D0%B1%D0%BE%D1%80%D1%83%D0%B4%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5_%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C_%D0%92_%D0%9C%D0%BE%D1%81%D0%BA%D0%B2%D0%B5_%D0%A3_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B3%D0%BE_%D0%94%D0%B8%D1%81%D1%82%D1%80%D0%B8%D0%B1%D1%8C%D1%8E%D1%82%D0%B5%D1%80%D0%B0_MedicRay
diplom_emaic · August 19, 2023 at 12:25 pm
купить приложение к диплому магистра https://diplom-magistratura.ru/
iabcHauct · August 19, 2023 at 12:52 pm
tadalafil generic where to buy http://tadalafilise.cyou/# cialis at canadian pharmacy
John#smith[Vapobetotiqepryl,2,5] · August 19, 2023 at 1:22 pm
Explore the world of [url=https://nicotine-pouches.store/]Nicotine pouch shop online[/url] and discover exciting flavors for your preferences!
Bradleypooth · August 19, 2023 at 2:41 pm
magic chef wine cooler repair service san diego
Bradleypooth · August 19, 2023 at 3:17 pm
amana dryer repair service san diego
John#Smith[Xyzabc123,2,5] · August 19, 2023 at 3:25 pm
Discover the thrill of trying out different flavors with our outstanding selection of [url=https://nicotine-pouches.store/]Top selling fresh nicotine pouches[/url] – a journey you don’t want to miss!
Natalie · August 19, 2023 at 3:36 pm
Awesome information, Thanks.
Thomaslor · August 19, 2023 at 4:05 pm
оформить оборудование в лизинг
Larryswema · August 19, 2023 at 4:10 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steamdesktopauthenticator
KennethGed · August 19, 2023 at 4:14 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
download steam sda
KennethGed · August 19, 2023 at 4:34 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam desktop authenticator скачать
Thomaslor · August 19, 2023 at 4:36 pm
лизинг торгового оборудования для магазина продуктов
bbotinWeeta · August 19, 2023 at 4:37 pm
На сайте https://travelcast.fun вы сможете скачать читы на Аризона. Также здесь вы найдете сборки модов для Minecraft. Кроме того, имеется актуальная карта подарков на Амазинг. Представлены новые публикации, к примеру, сборка Зомби Апокалипсис. Также есть и топовые промокоды которые не только помогут существенно сэкономить, но и получить больше ресурсов, модификации. На сайте регулярно появляется новая информация, а также данные. Есть и поздравительные открытки, рамки для текста, а также открытки для любимой подруги.
Edwardengat · August 19, 2023 at 4:42 pm
https://certifiedcanadapharm.store/# legit canadian pharmacy
Larryswema · August 19, 2023 at 4:48 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam desktop authenticator pc
Сервера · August 19, 2023 at 4:48 pm
[url=https://server-reestr-minpromtorg.ru/]сервера[/url]
VoIP да Телефония АТС Компьютеры Швицарвень, рельсы, шкафчики Ноутбуки Принтеры равным образом МФУ Серверные комплектующие Серверы Сетевое ясс Системы хранения
сервера
KennethGed · August 19, 2023 at 4:50 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
download steam guard mobile authenticator
Thomaslor · August 19, 2023 at 5:06 pm
оборудование для бизнеса в лизинг
KennethGed · August 19, 2023 at 5:12 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam pc authenticator
Larryswema · August 19, 2023 at 5:26 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
sda steam desktop authenticator
KennethGed · August 19, 2023 at 5:27 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
sda
Черепицы · August 19, 2023 at 5:34 pm
[url=https://modulnaya-metallocherepica.by/]Модульная металлочерепица[/url]
Модульная металлочерепица показывается возвышенным решением чтобы сложных кровельных конструкций. Этот экстерьер металлочерепицы, эксплуатируемый на сложноватых кровлях, внешне схож немного всегдашней листой металлочерепицей.
Модульная металлочерепица
Thomaslor · August 19, 2023 at 5:37 pm
шиномонтажное оборудование в лизинг
John#smith[Tovuzozozusuvicu,2,5] · August 19, 2023 at 5:58 pm
Discover an exciting array of options at the [url=https://nicotine-pouches.store/]nicotine pouches store[/url] for an unparalleled experience with nicotine pouches!
Larryswema · August 19, 2023 at 6:06 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
download steam authenticator
DannyElink · August 19, 2023 at 6:07 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam desktop authenticator
Сервера · August 19, 2023 at 6:36 pm
[url=https://server-reestr-minpromtorg.ru/]сервера[/url]
VoIP да Телефония СТАНЦИЯ Пк Швицарвень, рельсы, шкафы Ноутбуки Принтеры равно МФУ Серверные комплектующие Серверы Сетевое оборудование Теории хранения
сервера
DannyElink · August 19, 2023 at 6:37 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam guard download pc
Larryswema · August 19, 2023 at 6:42 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam desktop authenticator скачать
DannyElink · August 19, 2023 at 7:07 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam pc authenticator
Marianep · August 19, 2023 at 7:14 pm
Благодаря 3d печать abs , возможны операции, которые раньше считались невозможными. Медицинские специалисты могут изготавливать модели органов и сложных структур, чтобы лучше понять их анатомию перед операцией. Это позволяет уменьшить риски и повысить успешность хирургических вмешательств.
DavidAsteT · August 19, 2023 at 7:20 pm
ігри на автоматах
DavidAsteT · August 19, 2023 at 7:29 pm
2023年FIBA世界盃籃球賽,也被稱為第19屆FIBA世界盃籃球賽,將成為籃球歷史上的一個重要里程碑。這場賽事是自2019年新制度實行後的第二次比賽,帶來了更多的期待和興奮。
賽事的參賽隊伍涵蓋了全球多個地區,包括歐洲、美洲、亞洲、大洋洲和非洲。此次賽事將選出各區域的佼佼者,以及2024年夏季奧運會主辦國法國,共計8支隊伍將獲得在巴黎舉行的奧運賽事的參賽資格。這無疑為各國球隊提供了一個難得的機會,展現他們的實力和技術。
在這場比賽中,我們將看到來自不同文化、背景和籃球傳統的球隊們匯聚一堂,用他們的熱情和努力,為世界籃球迷帶來精彩紛呈的比賽。球場上的每一個進球、每一次防守都將成為觀眾和球迷們津津樂道的話題。
FIBA世界盃籃球賽不僅僅是一場籃球比賽,更是一個文化的交流平台。這些球隊代表著不同國家和地區的精神,他們的奮鬥和拼搏將成為啟發人心的故事,激勵著更多的年輕人追求夢想,追求卓越。 https://worldcups.tw/
DavidAsteT · August 19, 2023 at 7:33 pm
今彩539
今彩539:台灣最受歡迎的彩票遊戲
今彩539,作為台灣極受民眾喜愛的彩票遊戲,每次開獎都吸引著大量的彩民期待能夠中大獎。這款彩票遊戲的玩法簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。不僅如此,今彩539還有多種投注方式,如234星、全車、正號1-5等,讓玩家有更多的選擇和機會贏得獎金。
在《富遊娛樂城》這個平台上,彩民可以即時查詢今彩539的開獎號碼,不必再等待電視轉播或翻閱報紙。此外,該平台還提供了其他熱門彩票如三星彩、威力彩、大樂透的開獎資訊,真正做到一站式的彩票資訊查詢服務。
對於熱愛彩票的玩家來說,能夠即時知道開獎結果,無疑是一大福音。而今彩539,作為台灣最受歡迎的彩票遊戲,其魅力不僅僅在於高額的獎金,更在於那份期待和刺激,每當開獎的時刻,都讓人心跳加速,期待能夠成為下一位幸運的大獎得主。
彩票,一直以來都是人們夢想一夜致富的方式。在台灣,今彩539無疑是其中最受歡迎的彩票遊戲之一。每當開獎的日子,無數的彩民都期待著能夠中大獎,一夜之間成為百萬富翁。
今彩539的魅力何在?
今彩539的玩法相對簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。這種選號方式不僅簡單,而且中獎的機會也相對較高。而且,今彩539不僅有傳統的台灣彩券投注方式,還有線上投注的玩法,讓彩民可以根據自己的喜好選擇。
如何提高中獎的機會?
雖然彩票本身就是一種運氣遊戲,但是有經驗的彩民都知道,選擇合適的投注策略可以提高中獎的機會。例如,可以選擇參與合購,或者選擇一些熱門的號碼組合。此外,線上投注還提供了多種不同的玩法,如234星、全車、正號1-5等,彩民可以根據自己的喜好和策略選擇。
結語
今彩539,不僅是一種娛樂方式,更是許多人夢想致富的途徑。無論您是資深的彩民,還是剛接觸彩票的新手,都可以在今彩539中找到屬於自己的樂趣。不妨嘗試一下,也許下一個百萬富翁就是您!
DannyElink · August 19, 2023 at 7:37 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
steam mobile authenticator
DavidAsteT · August 19, 2023 at 7:49 pm
539
今彩539:台灣最受歡迎的彩票遊戲
今彩539,作為台灣極受民眾喜愛的彩票遊戲,每次開獎都吸引著大量的彩民期待能夠中大獎。這款彩票遊戲的玩法簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。不僅如此,今彩539還有多種投注方式,如234星、全車、正號1-5等,讓玩家有更多的選擇和機會贏得獎金。
在《富遊娛樂城》這個平台上,彩民可以即時查詢今彩539的開獎號碼,不必再等待電視轉播或翻閱報紙。此外,該平台還提供了其他熱門彩票如三星彩、威力彩、大樂透的開獎資訊,真正做到一站式的彩票資訊查詢服務。
對於熱愛彩票的玩家來說,能夠即時知道開獎結果,無疑是一大福音。而今彩539,作為台灣最受歡迎的彩票遊戲,其魅力不僅僅在於高額的獎金,更在於那份期待和刺激,每當開獎的時刻,都讓人心跳加速,期待能夠成為下一位幸運的大獎得主。
彩票,一直以來都是人們夢想一夜致富的方式。在台灣,今彩539無疑是其中最受歡迎的彩票遊戲之一。每當開獎的日子,無數的彩民都期待著能夠中大獎,一夜之間成為百萬富翁。
今彩539的魅力何在?
今彩539的玩法相對簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。這種選號方式不僅簡單,而且中獎的機會也相對較高。而且,今彩539不僅有傳統的台灣彩券投注方式,還有線上投注的玩法,讓彩民可以根據自己的喜好選擇。
如何提高中獎的機會?
雖然彩票本身就是一種運氣遊戲,但是有經驗的彩民都知道,選擇合適的投注策略可以提高中獎的機會。例如,可以選擇參與合購,或者選擇一些熱門的號碼組合。此外,線上投注還提供了多種不同的玩法,如234星、全車、正號1-5等,彩民可以根據自己的喜好和策略選擇。
結語
今彩539,不僅是一種娛樂方式,更是許多人夢想致富的途徑。無論您是資深的彩民,還是剛接觸彩票的新手,都可以在今彩539中找到屬於自己的樂趣。不妨嘗試一下,也許下一個百萬富翁就是您!
Peterautor · August 19, 2023 at 7:59 pm
Демонтаж стен Москва
Демонтаж стен Москва
DannyElink · August 19, 2023 at 8:07 pm
Steam Desktop Authenticator its a desktop emulator of the Steam authentication mobile application.
The program helps to log in to steam without a mobile phone.
There is support for automatic accept of trades and confirmation of steam transactions on the steam market.
download sda
Hera Heracles · August 19, 2023 at 8:30 pm
Appreciation to my father who informed me regarding this web site,
this webpage is actually awesome.
Черепицы · August 19, 2023 at 8:57 pm
[url=https://modulnaya-metallocherepica.by/]Модульная металлочерепица[/url]
Модульная черепица представать перед взором возвышенным ответом для сложных кровельных конструкций. Текущий экстерьер металлочерепицы, эксплуатируемый сверху сложноватых кровлях, внешне идентичен со заурядной лиственный металлочерепицей.
Модульная металлочерепица
genadiBaf · August 19, 2023 at 9:25 pm
Спортивный клуб «РоллерМания» предлагает записаться на занятия как взрослым, так и детям. На сайте https://roller-mania.ru/ ознакомьтесь с расценками на услуги. С вами будут работать опытные, компетентные тренеры, которые знают, как обучить человека самого разного возраста. Они объясняют доступно и доходчиво, поэтому каждый поймет материал. Есть возможность воспользоваться индивидуальными занятиями либо тренироваться вместе с группой. Вам будет дана схема катания, которой необходимо будет следовать.
AlbertMus · August 19, 2023 at 10:33 pm
canadian pharmacy ed medications: canada drugs online – online canadian pharmacy
dimulyloalm · August 20, 2023 at 12:18 am
На сайте https://diyproduction.ru/ вы найдете сувенирную продукцию с логотипом. Компания давно и на профессиональном уровне занимается созданием сувенирной продукции с логотипом. Здесь также имеются и корпоративные подарки, которые создаются в фирменном стиле. Среди огромного количества вариантов вы обязательно найдете такой, который полностью вас устроит: блокноты и ежедневники, сувениры для дома, подарочные наборы, корпоративные подарки, товары для спорта. Вся продукция создается из качественных, современных материалов, за счет чего является износостойкой.
BoecVardfinnagt · August 20, 2023 at 12:27 am
Здесь вы легально и безопасно cможете [url=https://skachat-minecraft1.xyz/]скачать Майнкрафт[/url].
get under 15 porno virgin girl · August 20, 2023 at 1:10 am
Terrific article! This is the type of info that
are supposed to be shared around the web. Shame on Google for not positioning this publish higher!
Come on over and discuss with my site . Thank
you =)
JohnnyWheva · August 20, 2023 at 2:02 am
coloradonewss.com
Barryfoeri · August 20, 2023 at 3:22 am
http://gabapentin.pro/# neurontin tablets uk
Form for Online Visa · August 20, 2023 at 3:57 am
Thanks in favor of sharing such a pleasant opinion, paragraph is nice, thats why i
have read it fully
AntonioVet · August 20, 2023 at 4:24 am
medicine neurontin capsules: neurontin 100mg cost – neurontin 100mg discount
diplom_rhymn · August 20, 2023 at 4:26 am
купить диплом бакалавра https://diplom-bakalavra.ru/
attestat_Gox · August 20, 2023 at 5:33 am
купить аттестаты за 9 класс 2017 https://attestat9.ru/
Marianep · August 20, 2023 at 5:58 am
3D печать стала неотъемлемой частью медицинской индустрии, предоставляя уникальные решения и возможности для улучшения здравоохранения. Врачи и инженеры используют 3d печать полиамид для создания индивидуальных медицинских имплантатов, протезов и ортезов, точно соответствующих анатомии пациентов.
Cathryn · August 20, 2023 at 9:18 am
Pet sitters earn an average salary of $16.09 per hour, according to Certainly.
Here is my web-site: http://www.upgrade.humble.no/index.php?option=com_phocaguestbook&view=phocaguestbook&id=1&am
Andrewwatte · August 20, 2023 at 10:04 am
https://docs.google.com/spreadsheets/d/18z_Xad00ETa3tfKbsAh4j1bSb6Au3Lk0FU5uRGPNBu0/edit?usp=sharing
Latanya · August 20, 2023 at 11:44 am
Thanks a lot. I value this.
JamesCer · August 20, 2023 at 2:27 pm
На сайте https://ecolan37.ru вы сможете выбрать и приобрести качественное постельное белье, которое создается из современных тканей, которые никогда не полиняют, а оттенок останется интенсивным, ярким на долгое время. Также на сайте присутствует и детская одежда, которая отлично циркулирует воздух. Закажите роскошное и привлекательное панно из гобелена, которое идеально впишется в интерьер и общую концепцию. В разделе представлены наматрасники, матрасы, чехлы на мебель и многое другое по доступным ценам.
Lucasretry · August 20, 2023 at 2:54 pm
cost of ivermectin lotion: ivermectin 400 mg brands – cost of ivermectin medicine
stavki_Nuh · August 20, 2023 at 3:25 pm
winline ru
WalterTup · August 20, 2023 at 3:36 pm
На сайте https://iz-medi.ru/ вы сможете заказать гибкую подводку из нержавеющей стали, фитинги, шаровые краны, а также многое другое. Ознакомьтесь с наиболее популярными категориями товаров, среди которых шаровые краны, гибкая подводка из нержавеющей стали. Перед вами огромный выбор товаров, регулярные выгодные предложения, каждую неделю проходят акции. В каталоге представлены все необходимые категории товаров. Для удобства воспользуйтесь специальным фильтром. Постоянно появляются горячие новинки.
sql2016 · August 20, 2023 at 5:23 pm
Hi there! Would you mind if I share your blog with my twitter group?
There’s a lot of people that I think would really appreciate your content.
Please let me know. Thanks
KaaiRag · August 20, 2023 at 5:32 pm
dark internet deep web sites
AndreHar · August 20, 2023 at 6:00 pm
When placing any Internet resource with a provider homadeas.com, you must specify the personal data of the owner or registration information about the company.
DavidAsteT · August 20, 2023 at 8:31 pm
Megaslot 927759f
hhdfHauct · August 20, 2023 at 9:11 pm
best price usa tadalafil http://tadalafilise.cyou/# tadalafil daily online
AlbertScake · August 20, 2023 at 10:01 pm
If the solution is completed, homeideascoach.com you can use the GDZ and see if it is correct. Difficult topic? You need to look into the solution book and see the algorithm of actions.
attestat_rhymn · August 20, 2023 at 10:33 pm
можно ли купить аттестат за 11 https://attestat11.ru/
Lanora · August 20, 2023 at 10:47 pm
Link exchange is nothing else except it is just placing the
other person’s webpage link on your page at appropriate place
and other person will also do same in favor of you.
odinyedgem · August 20, 2023 at 11:18 pm
На сайте https://iz-zala.ru/ вы сможете приобрести вешалки, подарки, настольные лампы и многое другое для создания приятного и привлекательного интерьера. Продукция отлично подходит для вас либо в качестве презента близкому человеку. Имеется вся необходимая информация, которая поможет быстро и легко сориентироваться в выборе. Интуитивно понятный интерфейс позволит узнать максимум информации о понравившемся товаре, приобрести его. Кроме того, на сайте вы узнаете огромное количество свежих, актуальных новостей.
Znrepm · August 20, 2023 at 11:57 pm
precose 25mg ca cost repaglinide order griseofulvin 250 mg generic
BoecVyeafinnagt · August 21, 2023 at 12:00 am
Здесь вы найдете лучшие [url=https://alco.rehab/]вывод из запоя[/url].
insurance in nevada · August 21, 2023 at 1:33 am
The visuals and graphics you have actually included absolutely enrich
the post. It’s an enjoyment to review such a well-thought-out blog post.
My web-site – insurance in nevada
Barryfoeri · August 21, 2023 at 2:18 am
http://stromectolonline.pro/# ivermectin 80 mg
CraigTed · August 21, 2023 at 3:06 am
https://betonistra24.ru/
CraigTed · August 21, 2023 at 3:44 am
https://betonistra24.ru/
Josephodoni · August 21, 2023 at 3:56 am
Банкротство физических лиц в Москве – https://newstes.ru/2023/08/17/bankrotstvo-fizicheskih-lic-glubokij-vzgljad.html подробная информация по процедуре.
ремонт стеклопакетов в Жодино · August 21, 2023 at 3:59 am
Greetings from Carolina! I’m bored to tears at work so I decided to check out your site on my iphone during lunch break. I really like the info you present here and can’t wait to take a look when I get home. I’m amazed at how quick your blog loaded on my cell phone .. I’m not even using WIFI, just 3G .. Anyhow, excellent site!
CraigTed · August 21, 2023 at 4:12 am
https://betonistra24.ru/
HectorMak · August 21, 2023 at 4:13 am
Useful knowledge. Regards.
admission essay writing service reviews [url=https://topswritingservices.com/]write essay service[/url] cheap reliable essay writing service [url=https://essaywriting4you.com/]importance of essay writing[/url] quick essay writing service assignment writing service canada [url=https://writingpaperforme.com/]research paper writers[/url] write my term paper cheap [url=https://custompaperwritersservices.com/]website that writes papers for you[/url] hire research paper writer
DavidAsteT · August 21, 2023 at 4:24 am
玩運彩:體育賽事與娛樂遊戲的完美融合
在現代社會,運彩已成為一種極具吸引力的娛樂方式,結合了體育賽事的激情和娛樂遊戲的刺激。不僅能夠享受體育比賽的精彩,還能在賽事未開始時沉浸於娛樂遊戲的樂趣。玩運彩不僅提供了多項體育賽事的線上投注,還擁有豐富多樣的遊戲選擇,讓玩家能夠在其中找到無盡的娛樂與刺激。
體育投注一直以來都是運彩的核心內容之一。玩運彩提供了眾多體育賽事的線上投注平台,無論是NBA籃球、MLB棒球、世界盃足球、美式足球、冰球、網球、MMA格鬥還是拳擊等,都能在這裡找到合適的投注選項。這些賽事不僅為球迷帶來了觀賽的樂趣,還能讓他們參與其中,為比賽增添一份別樣的激情。
其中,PM體育、SUPER體育和鑫寶體育等運彩系統商成為了廣大玩家的首選。PM體育作為PM遊戲集團的體育遊戲平台,以給予玩家最佳線上體驗為宗旨,贏得了全球超過百萬客戶的信賴。SUPER體育則憑藉著CEZA(菲律賓克拉克經濟特區)的合法經營執照,展現了其合法性和可靠性。而鑫寶體育則以最高賠率聞名,通過研究各種比賽和推出新奇玩法,為玩家提供無盡的娛樂。
玩運彩不僅僅是一種投注行為,更是一種娛樂體驗。這種融合了體育和遊戲元素的娛樂方式,讓玩家能夠在比賽中感受到熱血的激情,同時在娛樂遊戲中尋找到輕鬆愉悅的時光。隨著科技的不斷進步,玩運彩的魅力將不斷擴展,為玩家帶來更多更豐富的選擇和體驗。無論是尋找刺激還是尋求娛樂,玩運彩都將是一個理想的選擇。 https://telegra.ph/2023-年玩彩票並投注體育-08-16
BrandonBem · August 21, 2023 at 5:49 am
bestchicago.net
Arthurteams · August 21, 2023 at 6:04 am
дэдди казино официальный сайт
DavidAsteT · August 21, 2023 at 6:08 am
今彩539:台灣最受歡迎的彩票遊戲
今彩539,作為台灣極受民眾喜愛的彩票遊戲,每次開獎都吸引著大量的彩民期待能夠中大獎。這款彩票遊戲的玩法簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。不僅如此,今彩539還有多種投注方式,如234星、全車、正號1-5等,讓玩家有更多的選擇和機會贏得獎金。
在《富遊娛樂城》這個平台上,彩民可以即時查詢今彩539的開獎號碼,不必再等待電視轉播或翻閱報紙。此外,該平台還提供了其他熱門彩票如三星彩、威力彩、大樂透的開獎資訊,真正做到一站式的彩票資訊查詢服務。
對於熱愛彩票的玩家來說,能夠即時知道開獎結果,無疑是一大福音。而今彩539,作為台灣最受歡迎的彩票遊戲,其魅力不僅僅在於高額的獎金,更在於那份期待和刺激,每當開獎的時刻,都讓人心跳加速,期待能夠成為下一位幸運的大獎得主。
彩票,一直以來都是人們夢想一夜致富的方式。在台灣,今彩539無疑是其中最受歡迎的彩票遊戲之一。每當開獎的日子,無數的彩民都期待著能夠中大獎,一夜之間成為百萬富翁。
今彩539的魅力何在?
今彩539的玩法相對簡單,玩家只需從01至39的號碼中選擇5個號碼進行投注。這種選號方式不僅簡單,而且中獎的機會也相對較高。而且,今彩539不僅有傳統的台灣彩券投注方式,還有線上投注的玩法,讓彩民可以根據自己的喜好選擇。
如何提高中獎的機會?
雖然彩票本身就是一種運氣遊戲,但是有經驗的彩民都知道,選擇合適的投注策略可以提高中獎的機會。例如,可以選擇參與合購,或者選擇一些熱門的號碼組合。此外,線上投注還提供了多種不同的玩法,如234星、全車、正號1-5等,彩民可以根據自己的喜好和策略選擇。
結語
今彩539,不僅是一種娛樂方式,更是許多人夢想致富的途徑。無論您是資深的彩民,還是剛接觸彩票的新手,都可以在今彩539中找到屬於自己的樂趣。不妨嘗試一下,也許下一個百萬富翁就是您!
MichalMal · August 21, 2023 at 6:10 am
https://soapidea.ru/
MichalMal · August 21, 2023 at 6:32 am
https://umehorelstroy.ru/
MichalMal · August 21, 2023 at 6:55 am
https://l2pantheon.ru/razlichnye-tipy-kotlov/
erofeeeteta · August 21, 2023 at 7:01 am
На сайте http://academstudio.ru вы сможете заказать обратный звонок для того, чтобы воспользоваться услугами студии интерьеров «Академия Дизайна». Здесь вам разработают полный дизайн-проект со спецификацией, визуализацией, а также комплектацией. В компании разработают дизайн-проект для коммерческого, так и жилого помещения. Посмотреть все работы вы сможете прямо сейчас. Компанией реализовано несколько сотен удачных проектов. В обязательном порядке обговаривается проект. Оплата работ является поэтапной.
Arthurteams · August 21, 2023 at 7:13 am
казино дэдди зеркало
MichalMal · August 21, 2023 at 7:17 am
https://drivim.ru/
Taylorsek · August 21, 2023 at 7:32 am
gama casino онлайн
http://skodarapidclub.ru/forum/showthread.php?p=1407681
И так, дорогие друзья, добро пожаловать в Gama Casino — место, где рождаются легенды, а каждый Гама Казино игрок может стать главным героем своей собственной истории. Приготовьтесь к вращению барабанов, потому что здесь рождаются победители!Итак, если вы ищете вход на официальный сайт, где можно играть бесплатно и на русском языке, ваш выбор однозначно — Gama Casino. Гама Казино сделает ваше путешествие в мир азарта по-настоящему незабываемым. Присоединяйтесь к нам сейчас и откройте дверь в азартное будущее прямо сейчас!
khomydok · August 21, 2023 at 7:43 am
На сайте https://polikarbonat-samara.ru/ оформите заявку для того, чтобы приобрести поликарбонат, теплицы и от официального поставщика. Он работает на рынке более 12 лет, а потому знает все нюансы работы, чтобы предложить потребителю все то, что пользуется огромным спросом и высокого качества. При необходимости вы сможете заказать оперативную доставку поликарбоната по Самаре, а также области. На всю продукцию распространяются гарантии. Ознакомьтесь со всем каталогом товаров.
CherylKib · August 21, 2023 at 8:53 am
Vavada casino вход
https://www.prestashop.com/forums/profile/1807730-faqtp/
Для ценителей азарта и риска, для тех, кто ищет настоящие адреналиновые ощущения, Казино Вавада подготовило специальные разделы с карточными играми и рулеткой. Здесь каждая ставка – это шанс поймать удачу за хвост и уйти с внушительным выигрышем.Не забывайте, что Казино Вавада предлагает не только возможность играть на деньги, но и испытать удачу в бесплатных режимах. Это отличная возможность потренироваться перед серьезной игрой и раскрутить барабаны в слоты-онлайн в том режиме, который Вам по душе.
ScottVor · August 21, 2023 at 8:56 am
business-exclusive.com
CherylKib · August 21, 2023 at 9:08 am
Vavada casino сайт
https://adminclub.org/member.php?action=profile&uid=50110
Полная версия игровых автоматов, предоставленная Казино Вавада, бесплатно открывает перед вами мир бескрайних возможностей. Играйте, ставьте, наслаждайтесь каждым вращением барабанов, ведь именно здесь сбываются мечты. Вавада Казино — это не просто онлайн-казино, это уникальная платформа, где каждый игрок может почувствовать себя настоящим победителем.Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.
Douglasneugs · August 21, 2023 at 9:12 am
Stay updated with the industry trends by tuning into AppForce1: news and info for iOS app developers RSS Feed.
DavidAsteT · August 21, 2023 at 9:14 am
tombak118
Shawnpayon · August 21, 2023 at 9:54 am
brillx casino официальный мобильная версия
https://brillx-kazino.com
Бриллкс казино в 2023 году предоставляет невероятные возможности для всех азартных любителей. Вы можете играть онлайн бесплатно или испытать удачу на деньги — выбор за вами. От популярных слотов до классических карточных игр, здесь есть все, чтобы удовлетворить даже самого искушенного игрока.Играя в Brillx Казино, вы окунетесь в мир невероятных возможностей. Наши игровые автоматы не только приносят удовольствие, но и дарят шанс выиграть крупные денежные призы. Ведь настоящий азарт – это когда каждое вращение может изменить вашу жизнь!
CherylKib · August 21, 2023 at 10:02 am
Вавада казино играть
https://wiki.tzit.ru/index.php?title=%D0%A3%D1%87%D0%B0%D1%81%D1%82%D0%BD%D0%B8%D0%BA:Hfydu
Казино Вавада – это не просто игровая площадка, это целый игровой космос, где каждый спин барабанов слотов-онлайн превращает ваше время в захватывающее событие. Полная версия игровых автоматов бесплатно раскроет перед Вами мир невероятных возможностей. Неважно, новичок Вы или опытный игрок, Вавада Казино дарит радость от игры и шанс победить!Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.
AntonioVet · August 21, 2023 at 10:05 am
where to get zithromax over the counter: where can i purchase zithromax online – zithromax azithromycin
Shawnpayon · August 21, 2023 at 10:12 am
скачать казино brillx
https://brillx-kazino.com
Наше казино стремится предложить лучший игровой опыт для всех игроков, и поэтому мы предлагаем возможность играть как бесплатно, так и на деньги. Если вы новичок и хотите потренироваться перед серьезной игрой, то вас приятно удивят бесплатные режимы игр. Они помогут вам разработать стратегии и привыкнуть к особенностям каждого игрового автомата.В 2023 году Brillx Казино стало настоящим оазисом для азартных путешественников. Подарите себе незабываемые моменты радости и азарта. Не упустите свой шанс сорвать куш и стать частью легендарной истории на страницах брилкс казино.
CherylKib · August 21, 2023 at 10:17 am
Вавада казино официальный сайт
http://www.corsoclub.ru/forum/profile.php?section=essentials&id=8884
Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!Мы понимаем, что азарт – это страсть, влекущая вас в водоворот волнений и эмоций. Именно поэтому наш виртуальный портал оформлен с максимальным комфортом и удобством. От главной страницы до разделов с игровыми автоматами, Vavada Casino заботится о вашем удовольствии и простоте навигации.
JaredChodo · August 21, 2023 at 10:52 am
https://t.me/casino_otziv
JosephCef · August 21, 2023 at 11:06 am
https://ledbookmark.com/story776768/reduslim-apotheke
JaredChodo · August 21, 2023 at 11:12 am
https://t.me/vulkan_casino_off
Shawnpayon · August 21, 2023 at 11:21 am
казино brillx официальный сайт играть
brillx официальный сайт
Играя на Brillx Казино, вы можете быть уверены в честности и безопасности своих данных. Мы используем передовые технологии для защиты информации наших игроков, так что вы можете сосредоточиться исключительно на игре и наслаждаться процессом без каких-либо сомнений или опасений.В 2023 году Brillx предлагает совершенно новые уровни азарта. Мы гордимся тем, что привносим инновации в каждый аспект игрового процесса. Наши разработчики работают над уникальными и захватывающими играми, которые вы не найдете больше нигде. От момента входа на сайт до момента, когда вы выигрываете крупную сумму на наших аппаратах, вы будете окружены неповторимой атмосферой удовольствия и удачи.
Shawnpayon · August 21, 2023 at 11:38 am
казино brillx официальный сайт играть
https://brillx-kazino.com
Добро пожаловать в увлекательный мир азарта и развлечений на официальном сайте Brillx Казино! Если вы ищете захватывающий опыт игры в игровые аппараты, то ваш поиск завершен. Brillx Казино – это не просто блистательный выбор игр, это настоящее путешествие в мир азарта и возможностей.Добро пожаловать в удивительный мир азарта и веселья на официальном сайте казино Brillx! Год 2023 принес нам новые горизонты в мире азартных развлечений, и Brillx на переднем крае этой революции. Если вы ищете непередаваемые ощущения и возможность сорвать джекпот, то вы пришли по адресу.
Jeffreyribre · August 21, 2023 at 12:16 pm
https://stromectolonline.pro/# ivermectin nz
JosephCef · August 21, 2023 at 12:17 pm
https://esocialmall.com/story711139/reduslim-kaufen-dm
JosephCef · August 21, 2023 at 1:28 pm
https://thebookmarkage.com/story15404220/reduslim-kaufen
gacheZof · August 21, 2023 at 2:23 pm
По ссылке https://play.google.com/store/apps/details?id=com.matchfan2323 сделайте свои ставки в популярной БК «Леон». Этот бренд возник еще в 2007 году, а в 2016 начал активно принимать ставки. Важным моментом является то, что компания работает на прозрачных, честных условиях, имеет все необходимые сертификаты, а потому работает честно, на выгодных условиях, предлагая пользователям неплохо заработать и получить гонорар. Все, что вам потребуется – только везение и желание разобраться во всех функциях сайта.
trener_Nuh · August 21, 2023 at 2:33 pm
https://trenerhimki.ru/
JosephCef · August 21, 2023 at 2:42 pm
https://bookmarkangaroo.com/story15456444/reduslim-kaufen-bei-dm
Zikuul · August 21, 2023 at 2:51 pm
purchase mintop generic buy ed pills gb buy ed pills online
Lucasretry · August 21, 2023 at 2:59 pm
zithromax pill: zithromax coupon – where can i buy zithromax medicine
JosephCef · August 21, 2023 at 3:54 pm
https://list.ly/b-u-i-l-d-er-b-u-z-z-8-1-8
JosephCef · August 21, 2023 at 5:05 pm
https://socialmediastore.net/story15337131/reduslim-kaufen-bei-dm
JudithBruip · August 21, 2023 at 5:20 pm
gama casino вход
http://forum.anomalythegame.com/viewtopic.php?f=2&t=159125
И не забывайте, что Гама Казино – это не только игровые автоматы, это целый мир развлечений. Блэкджек, покер, рулетка – каждая игра как аккорд в мелодии вашего азартного вечера. Gama Casino – это как волшебная палитра, на которой каждый ход становится штрихом в вашем произведении.Так что, смело ступайте на порог Gama Casino! Вас ждут бескрайние азартные просторы, словно пустыни, раскинувшиеся перед оазисом игр. Помните, что Гама Казино – это не просто место для игры, это место, где ваша удача примет вас широким жестом, словно старого друга.
JudithBruip · August 21, 2023 at 5:33 pm
казино gama войти
http://www.aircon.ru/forum/index.php?PAGE_NAME=message&FID=20&TID=67108
Как только вы преодолеете порог Gama Casino, вы ощутите вибрацию азарта, словно планета азартных игр приветствует вас своими руками. Гама Казино создано для тех, кто стремится к большему, для искателей уникальных ощущений и неповторимых моментов.Итак, если вы ищете вход на официальный сайт, где можно играть бесплатно и на русском языке, ваш выбор однозначно — Gama Casino. Гама Казино сделает ваше путешествие в мир азарта по-настоящему незабываемым. Присоединяйтесь к нам сейчас и откройте дверь в азартное будущее прямо сейчас!
rc boat · August 21, 2023 at 5:59 pm
Fabulous, what a web site it is! This webpage presents useful information to us, keep it up.
my web-site – rc boat
JudithBruip · August 21, 2023 at 6:24 pm
казино gama вход
https://tlap.com/forum/profiles/132904/info/
Игровые автоматы в России принимают новое измерение с Gama Casino. Взлетайте вместе с нами на вершину азартных впечатлений, где каждая ставка — это шанс доказать свое превосходство. Гама Казино дарит вам множество вариантов, чтобы сделать ваш путь к победе уникальным и неповторимым.Gama Casino — не просто интернет-казино на русском языке, это эпицентр страсти и риска, где каждый Гама Казино игрок становится настоящим героем своей судьбы. Здесь, на нашем виртуальном азартном корабле, ваши желания и мечты воплощаются в жизнь с каждым вращением барабанов игровых автоматов.
JudithBruip · August 21, 2023 at 6:38 pm
gama casino играть бесплатно
https://www.chef.com.ua/index.php/forum/diet/bystrye-dengi-4388.html
Итак, если вы ищете вход на официальный сайт, где можно играть бесплатно и на русском языке, ваш выбор однозначно — Gama Casino. Гама Казино сделает ваше путешествие в мир азарта по-настоящему незабываемым. Присоединяйтесь к нам сейчас и откройте дверь в азартное будущее прямо сейчас!На страницах Gama Casino вы сможете играть бесплатно и наслаждаться моментом, пока удача раскрывает перед вами свои карты. Это не просто онлайн-казино, это гавань для тех, кто ценит азарт и комфорт. Гама Казино откроет вам двери в мир, где реальность переплетается с виртуальностью, а вы становитесь хозяином собственной удачи.
olrcb.net · August 21, 2023 at 6:50 pm
I feel this is one of the so much significant info for me.
And i am glad studying your article. However wanna statement on few
general issues, The website style is wonderful, the articles is in reality great : D.
Just right process, cheers
additional coverage · August 21, 2023 at 9:02 pm
you are really a just right webmaster. The site loading velocity
is incredible. It kind of feels that you’re doing any distinctive
trick. Furthermore, The contents are masterpiece. you have done a magnificent process
in this subject!
Also visit my web page … additional coverage
bestiality · August 21, 2023 at 10:05 pm
Exceⅼlent beat ! I wish tto apprentice while you amend your site, how could
i subscribe for a blog site? The account helped me a acceptable deal.
I have been tiny bit familiar of this your broadcast provided vivid transparent idea
Josephodoni · August 21, 2023 at 10:42 pm
Платформа Филллин помогает подобрать процедуру, выбрать клинику и записаться на приём к косметологу https://filllin.ru
BoecVyvafinnagt · August 21, 2023 at 11:04 pm
Здесь вы найдете лучшие [url=https://alco.rehab/vyvod-iz-zapoya/]вывод из запоя[/url].
MichaelLoutt · August 21, 2023 at 11:05 pm
ivermectin buy online [url=http://stromectolonline.pro/#]buy ivermectin canada[/url] buy ivermectin pills
desmopressinmg generic · August 22, 2023 at 12:52 am
garcinia cambogia 100caps without a doctor prescription garcinia cambogia 100caps prices garcinia cambogia 100caps pharmacy
Nancyses · August 22, 2023 at 1:28 am
cat casino регистрация на сайте
http://1723.ru/forums/index.php?showuser=20557
Cat Casino предоставляет широкий выбор игровых автоматов – от классических до современных, от простых до сложных. Каждый слот – это уникальный мир, где сокровища ждут своего обладателя. Скачай игровые автоматы на свое устройство и окунись в океан разнообразия и волнения.Не упусти свой шанс с Cat Casino! Скачай игровые автоматы и начни свой путь к победе. Мы гарантируем честность и надежность, ведь твои эмоции – наша цель. Играй онлайн, скачивай слоты – с Cat Casino каждый день – это новое приключение!
Nancyses · August 22, 2023 at 1:42 am
catcasino
http://palomniki.su/forum/topic-2208.0.htm
Не упусти свой шанс с Cat Casino! Скачай игровые автоматы и начни свой путь к победе. Мы гарантируем честность и надежность, ведь твои эмоции – наша цель. Играй онлайн, скачивай слоты – с Cat Casino каждый день – это новое приключение!Скачать игровые автоматы с официального сайта Cat Casino – это твой билет в мир невероятных приключений и шанс на солидные выигрыши. Насладись увлекательным процессом игры, почувствуй дыхание удачи на своем лице. Мы знаем, как сделать игровой процесс неповторимым, как подарить тебе незабываемые моменты азарта.
kedai komputer near me · August 22, 2023 at 2:16 am
Hi! Quick question that’s entirely off topic.
Do you know how to make your site mobile friendly? My website looks
weird when browsing from my iphone 4. I’m trying to find
a theme or plugin that might be able to fix this issue.
If you have any recommendations, please share. Appreciate it!
HectorMak · August 22, 2023 at 2:23 am
Wonderful advice. Appreciate it!
essay writing help [url=https://bestpaperwritingservice.com/]best paper writing services reviews[/url] paying someone to write a paper for you [url=https://bestonlinepaperwritingservices.com/]where to buy papers[/url] college paper service letter writing service berkeley [url=https://payforanessaysonline.com/]can you pay someone to write an essay[/url] pay for essay cheap [url=https://buycheapessaysonline.com/]buying university essays[/url] pay for research paper
Nancyses · August 22, 2023 at 2:34 am
промокод в казино cat
https://www.producthunt.com/@boripat
С Cat Casino вы получаете билет в мир, где каждый может стать Кэтом на крыше мира. Мы готовы подарить вам больше, чем просто игры. Это место, где каждый может стать частью истории азартных приключений, где ваше имя запомнится как главный герой барабанов.Cat Casino, Кэт Казино – твой верный напарник в стремительном мире азартных игр. Наш официальный сайт создан для истинных ценителей азарта, для тех, кто готов окунуться в виртуальное приключение и ощутить настоящее волнение. Будь в центре событий с Cat Casino – твои желания – наш приоритет.
cameltoe · August 22, 2023 at 2:44 am
Whɑt you posted was actually very reasonable. But, think on this,
what if you werе to ѡrite a awesome headlіne? I mean, I don’t
want to tell you how to rrun ʏour website, but ѕuppse yoս added something that makes people deѕire more?
Ι mеan Drone Hardware & programming –
Teqto System is a ⅼittle plain. You could glаnce at Уahoo’s front page and
see how tһeey creatе рoѕt titles to grab viewers to open thе links.
You might add a video or a related picture oг two to get people excited about everything’ve written. Juust my opinion, it could Ьring your posts a
ⅼittle livelier.
Nancyses · August 22, 2023 at 2:48 am
cat casino официальный сайт
http://www.kosmetichka.ru/kosmoforum/viewtopic.php?f=16&t=13202
Скачать игровые автоматы на Cat Casino — это как открыть сундук с сокровищами у древнего пирата. Кэт Казино дарит вам этот ключ к виртуальной роскоши, который вас унесет в мир ярких красок и звуков, мир, где каждый барабан может стать вашим верным спутником. От бескрайних просторов космоса до забытых храмов древних цивилизаций, каждая игра на Cat Casino — это отдельная история, написанная специально для вас.Добро пожаловать на официальный портал азартных развлечений 2023 года — Cat Casino, лучшее место для тех, кто ищет возможность скачать игровые автоматы и насладиться их разнообразием, играя онлайн! Откройте двери в захватывающий мир азарта вместе с Кэт Казино, где каждый спин барабанов — это шанс поймать удачу за хвост и потрясти её до последней фишки.
Barryfoeri · August 22, 2023 at 3:09 am
http://gabapentin.pro/# neurontin 300mg
registr_viess · August 22, 2023 at 4:20 am
временная регистрация в москве для граждан https://registraciya-v-msk.ru/
AubreyActic · August 22, 2023 at 4:39 am
dublindecor.net
vochkelort · August 22, 2023 at 4:39 am
На сайте https://okb.kz вы сможете заказать такую услугу, как создание конструкторской документации по лабораторному, измерительному оборудованию. В этой компании вы сможете заказать практичную и надежную лабораторную мебель, тестер растворения, стол подъемный, а также многое другое. В каталоге представлен весь ассортимент товаров, ознакомиться с которыми вы сможете сейчас. Вся продукция является функциональной, качественной, надежной. Компания дополнительно оказывает и другие услуги. И все на высоком уровне.
Emily#jackson[Zupiqofekopabacu,2,5] · August 22, 2023 at 5:36 am
Explore the diverse world of [url=https://nicotine-pouches.online/velo/]velo snus[/url] and savor the richness of our exclusive range of flavors!
steam_Nuh · August 22, 2023 at 7:28 am
steam authenticator desktop
jQNzCQfr · August 22, 2023 at 8:04 am
generic cialis cost Conclusion and Future Directions
situs slot online s77 · August 22, 2023 at 8:34 am
Good day! This is kind of off topic but I need some guidance from an established
blog. Is it tough to set up your own blog? I’m not very techincal but I can figure things out pretty fast.
I’m thinking about creating my own but I’m not sure where to start.
Do you have any points or suggestions? Thanks
Rotband · August 22, 2023 at 8:50 am
Этот стройматериал легко транспортируется в герметичных пакетах. Перед нанесением смесь необходимо смешать с водой в требуемых пропорциях. Сухую штукатурку нужно выбирать исходя из основных характеристик, особенностей применения. [url=http://fishkaremonta.ru/]Knauf Rotband[/url], вы получаете уверенность в качестве и долговечности вашей отделки. Сделайте свой выбор в пользу надежных и проверенных материалов от Ротбанд!
AnthonyVop · August 22, 2023 at 9:03 am
alahomemaster.com
Charlessem · August 22, 2023 at 9:53 am
Вавада казино сайт
https://vavadacasino.cloud
И самое главное, в Казино Вавада вы можете играть на деньги в слоты-онлайн. Ваша мечта о больших выигрышах становится реальностью благодаря Вавада Казино. С каждым новым спином у вас есть шанс увеличить свой баланс и почувствовать вкус сладкой победы. Кстати, в Казино Вавада предоставляется возможность бесплатных пробных игр, чтобы вы могли попрактиковаться перед по-настоящему захватывающими ставками.Играть на деньги в Казино Вавада — это как путешествие в мир великолепных возможностей. Ведь здесь каждый спин барабанов может изменить вашу судьбу. Прочувствуйте азарт и адреналин, когда ваши ставки превращаются в невероятные выигрыши. Vavada Казино дарит вам шанс испытать волнение и эйфорию в каждой игре.
порно · August 22, 2023 at 10:05 am
порно
Jeffreyribre · August 22, 2023 at 10:24 am
https://azithromycin.men/# zithromax cost
Charlessem · August 22, 2023 at 10:25 am
Vavada casino онлайн
Вавада казино вход
На страницах Vavada Casino вы найдете бесчисленное множество возможностей для заработка и развлечения. Будьте готовы к адреналиновому взрыву, когда вы окунетесь в мир увлекательных слотов, предоставленных на полную готовность. И это действительно Вавада Казино дает вам уникальную возможность погрузиться в атмосферу азартных игр, не выходя из дома.Войдя на сайт Казино Вавада, вы сразу поймете, что это не просто интернет-казино. Это своеобразное волшебство, где каждый спин колеса фортуны приносит с собой долю неизведанных эмоций. Vavada Casino – это как зеркало, в котором отражается ваша страсть к риску и желание выиграть больше. Игровые автоматы здесь – это не просто машины, это партнеры в ваших азартных путешествиях.
Juliegeval · August 22, 2023 at 10:52 am
Vavada casino онлайн
https://puziki.rolka.me/viewtopic.php?id=319
Здесь вы найдете не только знакомые слоты, но и те, которые поразят своей уникальностью. Наша команда тщательно отбирает самые захватывающие и новаторские игры, чтобы каждый спин был настоящим открытием. Вавада Казино предлагает богатство вариантов – от классических фруктовых машин до современных слотов с захватывающими сюжетами.Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.
Juliegeval · August 22, 2023 at 11:07 am
Vavada casino играть
https://www.wedjat.ru/forum/profile/10350-wehore9463/
Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.
Charlessem · August 22, 2023 at 11:14 am
Vavada casino вход
https://vavadacasino.cloud
Vavada Casino — ваш билет в мир азартных развлечений! Ощутите пульс азарта, окунувшись в захватывающие слоты и игры, предоставленные Вавада Казино. Не упустите свой шанс на увлекательные призы и незабываемые эмоции. Погрузитесь в атмосферу азартного веселья прямо сейчас!Войдя на сайт Казино Вавада, вы сразу поймете, что это не просто интернет-казино. Это своеобразное волшебство, где каждый спин колеса фортуны приносит с собой долю неизведанных эмоций. Vavada Casino – это как зеркало, в котором отражается ваша страсть к риску и желание выиграть больше. Игровые автоматы здесь – это не просто машины, это партнеры в ваших азартных путешествиях.
Charlessem · August 22, 2023 at 11:27 am
Vavada casino играть
https://vavadacasino.cloud
Итак, если вы ищете место, где сходятся азарт, инновации и богатый выбор игр, то Казино Вавада – ваш идеальный выбор. Войдите и окунитесь в мир увлекательных приключений на страницах Vavada Casino. Здесь каждый спин колеса – это новый поворот в вашей истории азартных побед!Играйте в классические игровые автоматы или попробуйте свою удачу в современных видео-слотах — выбор за вами! Vavada Casino гордится своим богатым ассортиментом игр, который покоряет сердца гемблеров разных вкусов. От красочных и ослепительных игр до более спокойных и таинственных вариантов — здесь каждый найдет что-то по своему вкусу.
WilliamNug · August 22, 2023 at 11:56 am
https://ja.nfscdict.com/Buy_Facebook_Ads_Accounts
Juliegeval · August 22, 2023 at 12:03 pm
Vavada casino online
http://forum.jrudevels.org/profile.php?mode=viewprofile&u=556254
Чтобы начать свой путь к богатству и развлечениям на Vavada Casino, войдите на официальный сайт с легкостью и комфортом. Просто следуйте по интуитивно понятной навигации, и вы окажетесь в виртуальном мире увлекательных возможностей. И помните, что Вавада Казино заботится о своих игроках, предлагая лучшие бонусы и акции, которые подарят вам дополнительные шансы на победу.Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.
AlbertTub · August 22, 2023 at 12:11 pm
http://seo-pro-bux.ru
Lucasretry · August 22, 2023 at 12:15 pm
ivermectin rx: ivermectin buy nz – ivermectin cost canada
Juliegeval · August 22, 2023 at 12:18 pm
Вавада казино вход
https://forum.buh-info.ee/user-225.html
Для ценителей азарта и риска, для тех, кто ищет настоящие адреналиновые ощущения, Казино Вавада подготовило специальные разделы с карточными играми и рулеткой. Здесь каждая ставка – это шанс поймать удачу за хвост и уйти с внушительным выигрышем.Полная версия игровых автоматов, предоставленная Казино Вавада, бесплатно открывает перед вами мир бескрайних возможностей. Играйте, ставьте, наслаждайтесь каждым вращением барабанов, ведь именно здесь сбываются мечты. Вавада Казино — это не просто онлайн-казино, это уникальная платформа, где каждый игрок может почувствовать себя настоящим победителем.
WilliamNug · August 22, 2023 at 12:25 pm
https://aproblemsquaredwiki.com/User:AshleyBoler245
WilliamNug · August 22, 2023 at 12:44 pm
https://ja.nfscdict.com/Buy_Facebook_Accounts_For_Advertising_-_16926190981
WilliamNug · August 22, 2023 at 1:04 pm
https://wikigr.com/wiki/User:LulaBarreiro47
AntonioVet · August 22, 2023 at 1:10 pm
ivermectin gel: ivermectin cream 5% – ivermectin 12
фитнес тренер обучение · August 22, 2023 at 1:15 pm
This post is truly a pleasant one it helps new web users, who are wishing for blogging.
WilliamNug · August 22, 2023 at 1:25 pm
http://wiki.rl-transport.org/index.php/Buy_Facebook_Ads_Accounts_-_16926186251
AlbertTub · August 22, 2023 at 1:34 pm
http://diplom-yaroslavl.ru
Jesusunurf · August 22, 2023 at 1:59 pm
http://choxaydung.vn/forum/viewtopic.php?f=3&t=86808 youtube live bot
바이낸스 추천코드 · August 22, 2023 at 2:13 pm
Spot oon with this write-up, I sdriously believe this
amazing site needs far more attention. I’ll probably be returning to read through more, thanks for the info!
My web blog – 바이낸스 추천코드
Jesusunurf · August 22, 2023 at 2:19 pm
http://forum.arkhalia.info/viewtopic.php?f=4&t=550608 subscriber bots
DavidAsteT · August 22, 2023 at 2:30 pm
Megaslot
Jesusunurf · August 22, 2023 at 2:40 pm
https://who-says.xooit.com/t129307-YouTube-Booster-a-program-for-cheating-views-likes-on-YouT.htm#p162458 youtube view bot
AlbertTub · August 22, 2023 at 2:55 pm
http://za4eti.ru
Jesusunurf · August 22, 2023 at 3:00 pm
https://cyprus-rhodes.vraiforum.com/t12119-Popular-YouTube-Booster-program.htm#p32358 youtube like and view bot
Jefferygag · August 22, 2023 at 4:14 pm
It is enough to go to a greenhouseislands.com special page and enter the domain name that you want to check in the field.
AlbertTub · August 22, 2023 at 4:14 pm
http://assistent-student.ru
DwightWeise · August 22, 2023 at 4:23 pm
https://telegra.ph/Car-Rental-Business-Podcast-Channels-08-22
AlbertTub · August 22, 2023 at 5:33 pm
http://gos2020.ru
DavidAsteT · August 22, 2023 at 5:38 pm
카지노솔루션
카지노솔루션
AlbertTub · August 22, 2023 at 6:52 pm
https://yard-estate.ru
Sharonloowl · August 22, 2023 at 7:23 pm
казино gama online
http://nash-forum.itaec.ru/member.php?u=21075
Gama Casino — это не просто платформа для азартных игр, это легендарное место, где ваша мечта об игре на рубли сливается с реальностью. Чувствуйте ритм азарта в каждом клике, ведь Гама Казино откроет перед вами дверь в увлекательный мир азартных развлечений.Играть в Gama Casino – это не просто казино, это путешествие в мир азартных мечтаний, где каждый спин – это новый поворот в сюжете вашей игры. Игровые автоматы России откроют перед вами безграничные возможности для выигрыша и развлечения. Каждая машина в Gama Casino – это как глава в увлекательной книге, наполненной сюрпризами и азартом.
Sharonloowl · August 22, 2023 at 7:37 pm
gama casino
https://w202.clanbb.ru/viewtopic.php?id=30162
И не забывайте, что Гама Казино – это не только игровые автоматы, это целый мир развлечений. Блэкджек, покер, рулетка – каждая игра как аккорд в мелодии вашего азартного вечера. Gama Casino – это как волшебная палитра, на которой каждый ход становится штрихом в вашем произведении.И так, дорогие друзья, добро пожаловать в Gama Casino — место, где рождаются легенды, а каждый Гама Казино игрок может стать главным героем своей собственной истории. Приготовьтесь к вращению барабанов, потому что здесь рождаются победители!
AlbertTub · August 22, 2023 at 8:11 pm
http://coursework24.ru
bhhtHauct · August 22, 2023 at 8:19 pm
cialis tablets 20mg for sale cialis 10mg before and after cialis
Sharonloowl · August 22, 2023 at 8:30 pm
казино gama online
http://www.aircon.ru/forum/index.php?PAGE_NAME=message&FID=20&TID=67122&MID=183772
Gama Casino — это не просто платформа для азартных развлечений, это своего рода арт-галерея игрового мира. Наши разработчики тщательно отобрали лучшие игровые автоматы, чтобы вы смогли наслаждаться невероятно качественной графикой и увлекательным геймплеем. Гама Казино — это место, где сливаются воедино элегантность и азарт, создавая неповторимую симфонию азартных эмоций.Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.
DavidAsteT · August 22, 2023 at 8:34 pm
The neural network will create beautiful girls!
Geneticists are already hard at work creating stunning women. They will create these beauties based on specific requests and parameters using a neural network. The network will work with artificial insemination specialists to facilitate DNA sequencing.
The visionary for this concept is Alex Gurk, the co-founder of numerous initiatives and ventures aimed at creating beautiful, kind and attractive women who are genuinely connected to their partners. This direction stems from the recognition that in modern times the attractiveness and attractiveness of women has declined due to their increased independence. Unregulated and incorrect eating habits have led to problems such as obesity, causing women to deviate from their innate appearance.
The project received support from various well-known global companies, and sponsors readily stepped in. The essence of the idea is to offer willing men sexual and everyday communication with such wonderful women.
If you are interested, you can apply now as a waiting list has been created.
high-risk insurance · August 22, 2023 at 8:36 pm
It goes over exactly how you’ve covered this subject matter totally.
Your knowledge really create a difference in comprehending it a lot better.
Feel free to surf to my web-site – high-risk insurance
Sharonloowl · August 22, 2023 at 8:44 pm
казино gama войти
https://forum.4duk.ru/memberlist.php?mode=viewprofile&u=25511
Так что, смело ступайте на порог Gama Casino! Вас ждут бескрайние азартные просторы, словно пустыни, раскинувшиеся перед оазисом игр. Помните, что Гама Казино – это не просто место для игры, это место, где ваша удача примет вас широким жестом, словно старого друга.На страницах Gama Casino вы сможете играть бесплатно и наслаждаться моментом, пока удача раскрывает перед вами свои карты. Это не просто онлайн-казино, это гавань для тех, кто ценит азарт и комфорт. Гама Казино откроет вам двери в мир, где реальность переплетается с виртуальностью, а вы становитесь хозяином собственной удачи.
Josephodoni · August 22, 2023 at 8:45 pm
[url=https://filllin.ru/procedures/inektsii_botoksa_1]Ботокс[/url]- суть процедуры заключается в том,что врач-косметолог вводит препарат на основе ботулотоксина в зоны, нуждающиеся в коррекции, например, междубровями, в уголки рта и глаз, в подбородок и лоб. После инъекций ботокса кожа разглаживается и сохраняет привлекательный вид в течение 6-8 месяцев при соблюдении всех рекомендованных процедур.
Douglasbem · August 22, 2023 at 8:45 pm
https://en.wikipedia.org/wiki/File:Cooking_on_the_grill_51192596107.jpg
AlbertTub · August 22, 2023 at 9:28 pm
http://interioproject.ru
steam_rhymn · August 22, 2023 at 9:52 pm
https://steamauthenticator.net/
registr_Anorp · August 22, 2023 at 9:59 pm
временная регистрация в санкт петербурге https://registraciya-v-spb.ru/
vavadajeczin · August 22, 2023 at 10:17 pm
[url=https://vavadajeczin.dp.ua]vavadajeczin.dp.ua[/url]
Vavada Casino – пользующийся славой казино во всем Области, располагает в наличии свыше 3000 слотов от 60 изготовителей софта.
vavadajeczin.dp.ua/mobile/
MiltonGak · August 22, 2023 at 10:28 pm
http://embeddedwiki.cs.aau.dk/wiki/Vitakuhni.ru
AlbertTub · August 22, 2023 at 10:44 pm
http://oknakras.ru
vavadazinjec · August 22, 2023 at 10:49 pm
[url=https://www.vavadazinjec.dp.ua/]www.vavadazinjec.dp.ua[/url]
Церемонный фотосайт Vavada casino – одно из наиболее топовых толпа, маловыгодный чуть только среди жителей россии, хотя и во почти всех остальных странах. Этто лицензированная штрафплощадка с софтом …
http://www.vavadazinjec.dp.ua
MiltonGak · August 22, 2023 at 11:02 pm
https://ewanfox.com/wiki/index.php?title=Vitakuhni.ru
BoecVdoafinnagt · August 22, 2023 at 11:23 pm
У нас вы можете заказать вызов [url=https://alco.rehab/narkolog-na-dom/]нарколог на дом[/url].
фитнес тренер обучение · August 22, 2023 at 11:34 pm
Hello there, You have performed an excellent job. I will definitely digg it and for my part recommend to my friends. I am sure they will be benefited from this site.
MiltonGak · August 22, 2023 at 11:37 pm
https://wiki.nerdbird.media/index.php?title=User:SoonSheets21771
AlbertTub · August 22, 2023 at 11:59 pm
https://royalseo.ru
vavadazinjec · August 23, 2023 at 12:02 am
[url=https://vavadazinjec.dp.ua/]vavadazinjec.dp.ua[/url]
Vavada – онлайн-казино, игровые автоматы, скидки, промо-акции равным образом челкогляделка сайта. Игровые автоматы в Вебе употребляются хоть младшей репутациею, нежели на навозных …
vavadazinjec.dp.ua
MiltonGak · August 23, 2023 at 12:12 am
http://sap.ient.ai/wiki/Vitakuhni.ru
vavadajeczin · August 23, 2023 at 12:37 am
[url=https://vavadajeczin.dp.ua/dzerkalo/]vavadajeczin.dp.ua/dzerkalo/[/url]
Vavada Casino – пользующийся славой казино умереть и не встать всем Подсолнечном, быть владельцем в течение присутствии свыше 3000 слотов через 60 изготовителей софта.
vavadajeczin.dp.ua/dzerkalo/
HectorMak · August 23, 2023 at 12:42 am
You have made your point quite effectively.!
admission essay writing service reviews [url=https://helpwithdissertationwriting.com/]dissertation consultants[/url] writing dissertation service [url=https://dissertationwritingtops.com/]dissertation writing service[/url] master dissertation writing services reference letter writing service [url=https://writingpaperforme.com/]can you write my paper[/url] professional research paper writer [url=https://custompaperwritersservices.com/]paper writer[/url] need help write my paper
MiltonGak · August 23, 2023 at 12:46 am
https://moravian.bucknell.edu/transcriptions/index.php?title=User:LFWBobbye532
Joshuabeisp · August 23, 2023 at 12:48 am
flarealestates.com
sport_viess · August 23, 2023 at 1:04 am
Как член, вы получите неограниченный доступ ко всем нашим тренажерам силовым Москва и фитнес-занятиям.
AlbertTub · August 23, 2023 at 1:14 am
http://mytichi-mu.ru
sex · August 23, 2023 at 1:26 am
Hi there! I know this is somewhat off topic but I was
wondering if you knew where I could get a captcha
plugin for my comment form? I’m using the same blog
platform as yours and I’m having difficulty finding one?
Thanks a lot!
vavadazinjec · August 23, 2023 at 1:47 am
[url=https://vavadazinjec.dp.ua/]vavadazinjec.dp.ua[/url]
Vavada – онлайн-казино, игровые автоматы, скидки, промо-акции равно челкогляделка сайта. Игровые автоматы в Сети интернет употребляются хоть минимальною популярностью, чем в течение навозных …
vavadazinjec.dp.ua
vavadazinjec · August 23, 2023 at 2:01 am
[url=https://www.vavadazinjec.dp.ua/]www.vavadazinjec.dp.ua[/url]
Церемонный сайт Vavada casino – одно изо самых лучшых толпа, как только средь жителей россии, но да умереть и не встать многих других странах. Это лицензированная площадка со софтом …
http://www.vavadazinjec.dp.ua
AlbertTub · August 23, 2023 at 2:30 am
http://foxdiplom.ru
level-26-tower · August 23, 2023 at 2:30 am
Pretty section of content. I just stumbled upon your site and in accession capital to
assert that I acquire actually enjoyed account your blog posts.
Any way I’ll be subscribing to your feeds and even I achievement you access
consistently rapidly.
Juliahok · August 23, 2023 at 3:38 am
промокод в казино cat
https://forum.trapeza.ru/viewtopic.php?f=17&t=291037&p=1312850
На Cat Casino, Кэт Казино, вас ждет не только увлекательный игровой процесс, но и щедрые бонусы. Мы знаем, как важно чувствовать себя желанным, и поэтому Cat Casino приготовил для вас множество приятных сюрпризов. Уникальные бонусы, бесплатные спины и множество других возможностей увеличить свой выигрыш — все это ждет вас на Cat Casino.Cat Casino – твой верный спутник в мире азарта! В 2023 году этот официальный сайт рад представить тебе уникальную возможность скачать игровые автоматы и окунуться в водоворот бесконечных развлечений прямо на своем устройстве. Ощути дыхание азарта в каждом вращении барабанов, будь в центре событий с Cat Casino, Кэт Казино.
Juliahok · August 23, 2023 at 3:51 am
cat casino промокод
http://newearth.topf.ru/viewtopic.php?id=5437
Особенностью Cat Casino является возможность скачать в 2023 году уникальное приложение, погрузиться в виртуальное казино в любое удобное для вас время. С Cat Casino, ваше устройство станет горячей точкой азартного влечения. Забудьте о скучных моментах ожидания — с Cat Casino, мир игры всегда в вашем кармане, готовый подарить азарт и адреналин, когда бы вы ни пожелали.Cat Casino – это не просто казино, это твой верный путь к удаче и развлечению. Не упустите свой шанс попробовать себя в роли счастливчика с Cat Casino, Кэт Казино. Скачай игровые автоматы и окунись в мир азарта прямо сейчас!
Juliahok · August 23, 2023 at 4:42 am
бонус код для казино cat
https://sarov.info/forum/memberlist.php?mode=viewprofile&u=73580
Добро пожаловать в удивительный мир азартных развлечений — Cat Casino, парадоксальное слияние элегантности и азарта. В этом 2023 году, Cat Casino стал бесспорным героем азартной индустрии, обещая незабываемые впечатления и бесконечное веселье. На Cat Casino, Кэт Казино вас ждет множество возможностей, будь вы опытный азартный игрок или новичок, только начинающий свой путь в мире карточных столов и игровых автоматов.Cat Casino — это не просто сайт для игры в азартные игры, это истинное шоу, где каждый спин на игровых автоматах может стать настоящим произведением искусства. В 2023 году мы снова удивляем своих гостей неординарной графикой и инновационными механиками игры. Это не просто казино, это виртуальная страна удовольствий, где каждый вращение барабана — это билет в мир фантазий и желаний.
Williamfrawn · August 23, 2023 at 4:55 am
ed pills for sale: buy ed pills online – erection pills
Juliahok · August 23, 2023 at 4:55 am
промокод в казино cat
https://kadrsov.ru/forum/tema/rabota-v-bukmekerskoy-kontore-2
Скачать игровые автоматы на Cat Casino — это как открыть сундук с сокровищами у древнего пирата. Кэт Казино дарит вам этот ключ к виртуальной роскоши, который вас унесет в мир ярких красок и звуков, мир, где каждый барабан может стать вашим верным спутником. От бескрайних просторов космоса до забытых храмов древних цивилизаций, каждая игра на Cat Casino — это отдельная история, написанная специально для вас.Не хотите скачивать? Не проблема! Cat Casino также предоставляет вам возможность играть онлайн, не загружая ничего на свое устройство. Просто пройдите регистрацию на официальном сайте, и вы окажетесь в виртуальной реальности Кэт Казино, где каждый клик мыши может повернуть ваш мир вверх дном.
AlbertTub · August 23, 2023 at 5:01 am
https://glg-gruzchik.ru
DavidDup · August 23, 2023 at 5:09 am
https://idomens.ru/
Isiah · August 23, 2023 at 6:44 am
Bukan cuman itu slot juga membagikan tips serta trik seputar cara bermain judi online untuk para pendatang baru semacam Metode Bermain yang Mudah dalam tiap tipe game Judi Slot Pragmatic Play yang telah slot sajikan. Bonus new member adalah salah satu jenis promo paling menarik bisa didapatkan oleh para pemain slot gacor hari ini. Mereka telah aktif di industri perjudian sejak tahun 2001 dan dikenal karena menciptakan permainan slot gacor maxwin dengan tema yang unik dan fitur bonus yang menarik. Thunderkick sering menciptakan permainan dengan tema yang tidak biasa dan fitur bonus yang menghibur. Beberapa judi slot gacor hari ini terkenal dari Thunderkick termasuk Pink Elephants, Esqueleto Explosivo, dan Birds on a Wire. Thunderkick adalah link slot gacor hari ini yang berbasis di Swedia dan telah beroperasi sejak tahun 2012. Mereka dikenal dengan desain grafis yang kreatif dan permainan slot gacor gampang menang maxwin yang unik. Kami sudah menjadi bandar Situs Judi Slot Online Terbaik sejak lama dan Mudah Menang di Asia dengan Bocoran Slot Server Jepang Gacor Hari Ini yang di berikan oleh Situs Slot Online yang Sering Suka Kasih Jackpot. Banyak sekali istilah keren bisa anda dengar dari berbagai penjuru pecinta slot gacor hari ini. Slot Jepang Paling Mudah Menang Jackpot Terus Hari Ini bisa anda daftarkan melalui Link Slot Gacor Server Jepang di atas.
WarrenPoons · August 23, 2023 at 6:53 am
Such toys are presented in the south-columbia.com online store.
Charliegairm · August 23, 2023 at 6:54 am
alabama-news.com
boise volkswagen · August 23, 2023 at 6:56 am
Hi there! Quick question that’s entirely off topic. Do you know how to make your site mobile friendly?
My web site looks weird when browsing from my apple iphone.
I’m trying to find a theme or plugin that might be able
to correct this issue. If you have any suggestions, please share.
Thanks!
Look into my web page :: boise volkswagen
Richardevard · August 23, 2023 at 7:37 am
https://1xdomen.ru/
Williamk · August 23, 2023 at 7:43 am
Discover the fascinating world of [url=https://nicotine-pouches.store/en/buy-snus-nicotine-pouches/]nicotine pouches eu[/url] and elevate your experience with our wide range of exquisite flavors!
Robertwer · August 23, 2023 at 8:16 am
buy paxlovid online: п»їpaxlovid – paxlovid pill
kuznehophy · August 23, 2023 at 9:02 am
На сайте https://pm3ed.tech/ вы сможете оформить заявку для того, чтобы записаться на курсы обучения управлению проектами. Вы сможете воспользоваться интенсивными курсами, а также тренингами. Кроме того, компания оказывает и педагогический консалтинг. В компании работают высококлассные сотрудники с огромным опытом, а потому они окажут услуги на высоком уровне. Преподаватели передают свои знания, опыт напрямую, что дает больший эффект. Ознакомьтесь с кейсами прямо сейчас. Преподаватели смогли обучить несколько сотен учителей, а также несколько тысяч студентов лучших ВУЗов.
Davidlog · August 23, 2023 at 9:39 am
https://paxlovid.top/# paxlovid buy
LoganRot · August 23, 2023 at 9:50 am
http://antibiotic.guru/# over the counter antibiotics
Profit from the Internet · August 23, 2023 at 12:28 pm
I want to to thank you for this excellent read!!
I absolutely loved every bit of it. I have got you bookmarked to look at new things you post…
jva electric fence malaysia · August 23, 2023 at 12:44 pm
Way cool! Some extremely valid points! I appreciate you writing
this write-up and also the rest of the site is very good.
Ебацца · August 23, 2023 at 1:32 pm
Ебацца
MelissaOvele · August 23, 2023 at 1:46 pm
Vavada casino вход
http://tsushima.su/forums/profile.php?section=personal&id=15210
Чтобы начать свой путь к богатству и развлечениям на Vavada Casino, войдите на официальный сайт с легкостью и комфортом. Просто следуйте по интуитивно понятной навигации, и вы окажетесь в виртуальном мире увлекательных возможностей. И помните, что Вавада Казино заботится о своих игроках, предлагая лучшие бонусы и акции, которые подарят вам дополнительные шансы на победу.Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.
MelissaOvele · August 23, 2023 at 2:01 pm
Vavada casino online
http://jeep.getbb.ru/viewtopic.php?f=6&t=3420&p=14425#p14425
Добро пожаловать в удивительный мир азарта и больших выигрышей — Казино Вавада! Этот завораживающий игровой портал являет собой настоящий рай для любителей азартных развлечений. Если вы ищете официальный сайт, который предоставит вам возможность войти и окунуться в захватывающий мир азартных игр, то Вавада Казино станет вашим надежным спутником.Вход на официальный сайт Казино Вавада — это проход в виртуальное королевство увлекательных игр и головокружительных ставок. Независимо от того, являетесь ли вы опытным игроком или новичком, Вавада Казино предлагает вам широкий спектр слотов-онлайн, где каждый спин барабанов — это шанс поймать удачу за хвост.
Johnnyrot · August 23, 2023 at 2:46 pm
new ed pills [url=https://ed-pills.men/#]mens erection pills[/url] ed drugs list
MelissaOvele · August 23, 2023 at 2:58 pm
Вавада казино вход
http://zpu-journal.ru/forum/view_profile.php?UID=267450
Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!
MelissaOvele · August 23, 2023 at 3:12 pm
Вавада казино онлайн
https://seobiznes.net/forum/5-4428-1
Что делает Vavada Casino настолько неповторимым? Это не только возможность играть на деньги в самых захватывающих слотах, но и атмосфера азарта, которая окутывает вас с первых секунд пребывания на сайте. Словно волшебная вуаль, обволакивающая каждого игрока, Вавада Казино создает идеальное сочетание риска и возможности.Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.
registr_Nuh · August 23, 2023 at 3:41 pm
временной регистрации иностранных граждан https://registraciya-msk.ru/
steam_emaic · August 23, 2023 at 4:49 pm
https://gllthub.com/Jessecar96/SteamDesktopAuthenticator/
LarryRax · August 23, 2023 at 5:06 pm
caribbean21.com
Leonardworgo · August 23, 2023 at 5:35 pm
Видеочат рулетка с девушками без регистрации. Виртуальный секс онлайн.
[url=http://rt.chat-ruletka-18.com]порно рулетка 18…[/url]
u pull it · August 23, 2023 at 6:25 pm
I reckon something truly special in this internet site.
Feel free to surf to my blog :: u pull it
Joseempixelm · August 23, 2023 at 8:08 pm
image source
UFABET ศึกษาวิธีแทงบอล · August 23, 2023 at 8:30 pm
This paragraph is truly a fastidious one it helps new net viewers, who are wishing for blogging.
DavidAsteT · August 23, 2023 at 8:32 pm
Antminer D9
Antminer D9
bbo slot303 · August 23, 2023 at 10:10 pm
I’m impressed, I must say. Seldom do I come across a blog
that’s both equally educative and engaging, and let me tell you, you have hit the nail on the head.
The problem is something that too few men and women are speaking intelligently
about. I am very happy I came across this
in my hunt for something relating to this.
Jalisaabone · August 23, 2023 at 10:35 pm
gama casino играть
https://hrv-club.ru/forums/index.php?autocom=gallery&req=si&img=4553
Мы понимаем, что каждый игрок уникален, как отпечаток пальца, поэтому в Gama Casino вы найдете игры, специально отобранные для тех, кто стремится к большему. Гама Казино — это ваш путь к невероятным эмоциям и уникальным победам.Приветствуем вас в удивительной вселенной азартных развлечений — Gama Casino, где каждый клик приоткроет завесу тайны захватывающего мира азарта и возможностей. Ищете путь к входу на официальный сайт, чтобы окунуться в водоворот азартных эмоций? Гама Казино — ваш проводник в этот потрясающий мир!
BoecVdaafinnagt · August 23, 2023 at 10:36 pm
У нас очень качественное [url=https://alco.rehab/lechenie-alkogolizma/]лечение алкоголизма[/url].
smihHauct · August 23, 2023 at 10:49 pm
40 mg cialis dosage cialis pills uk how long does levitra last
Jalisaabone · August 23, 2023 at 10:50 pm
гама казино
https://oldforum.citysakh.ru/?talkid=23516
И так, дорогие друзья, добро пожаловать в Gama Casino — место, где рождаются легенды, а каждый Гама Казино игрок может стать главным героем своей собственной истории. Приготовьтесь к вращению барабанов, потому что здесь рождаются победители!Так что, готовы взять свою ставку удачи? Gama Casino с удовольствием подарит вам билет в мир азартных впечатлений. Входите на официальный сайт Гама Казино и дайте себе шанс испытать дыхание настоящего азарта, словно вы впервые прокладываете путь в неизведанные земли возможностей.
Leonardworgo · August 23, 2023 at 11:01 pm
Видеочат рулетка с девушками без регистрации. Виртуальный секс онлайн.
[url=http://rt.chat-ruletka-18.com]порно чат рулетка18![/url]
HectorMak · August 23, 2023 at 11:13 pm
You’ve made your stand extremely nicely.!
college paper writing service reviews [url=https://writinganessaycollegeservice.com/]essay writer service[/url] science essay writing service [url=https://essayservicehelp.com/]legit essay writing service[/url] top college paper writing service best resume writing service uk [url=https://essaytyperhelp.com/]essays writing help[/url] cheap essay help [url=https://helptowriteanessay.com/]help essay writing[/url] expository essay help
Jalisaabone · August 23, 2023 at 11:46 pm
gama casino
http://cs-online.ru/forum/index.php?showtopic=13236
Gama Casino — не просто интернет-казино на русском языке, это эпицентр страсти и риска, где каждый Гама Казино игрок становится настоящим героем своей судьбы. Здесь, на нашем виртуальном азартном корабле, ваши желания и мечты воплощаются в жизнь с каждым вращением барабанов игровых автоматов.Проходите вход на официальный сайт Gama Casino и погрузитесь в мир волнения и страсти. Здесь каждый Гама Казино гость становится частью большой игры, где ставки — это не только монеты, но и судьбы. Играйте бесплатно и без ограничений, ведь Gama Casino создано для настоящих ценителей азарта.
แทงบอลสเต็ปUFABET · August 23, 2023 at 11:56 pm
There’s definately a lot to learn about this topic.
I like all of the points you made.
Jalisaabone · August 24, 2023 at 12:01 am
гама казино
http://www.smallcar.ru/talk/profile.php?mode=viewprofile&u=46002
Играть бесплатно в онлайн казино на русском языке – это не просто возможность попробовать свою удачу без риска, это способ окунуться в пучину азартных эмоций даже без вложений. Gama Casino предоставляет вам эту невероятную возможность. Гама Казино делает ставку на ваше удовольствие и комфорт, предлагая уникальный опыт игры.Gama Casino — это не просто платформа для азартных игр, это легендарное место, где ваша мечта об игре на рубли сливается с реальностью. Чувствуйте ритм азарта в каждом клике, ведь Гама Казино откроет перед вами дверь в увлекательный мир азартных развлечений.
FrankFauby · August 24, 2023 at 2:10 am
The word itself is a compound of the northfloridahouse.com English phrase “who is”, translated as “who is”.
https://coincoach.ca/ · August 24, 2023 at 3:00 am
Great goods from you, man. I have take note your stuff previous to and you’re just extremely great.
I actually like what you have received right here, certainly like what you’re stating and the best way during which
you are saying it. You are making it enjoyable and you
still take care of to stay it sensible. I cant wait to read far more from you.
This is actually a terrific website.
Williamfrawn · August 24, 2023 at 3:33 am
paxlovid for sale: paxlovid pill – Paxlovid over the counter
xrumer сайт · August 24, 2023 at 4:04 am
Прогоны Хрумером и GSA Ser без интернета
xrumer сайт
Robertwer · August 24, 2023 at 6:05 am
otc ed pills: ed pills that work – best male ed pills
Zfqevv · August 24, 2023 at 6:22 am
aspirin 75mg cost order aspirin 75 mg buy imiquimod no prescription
출장샵 · August 24, 2023 at 6:42 am
Students as well as faculty members of the tour group regarded the trip as both an illuminating and informative experience. Local tour guides highlighted the historical and mythological significance of each site and also stresse평택출장샵d the need for greater public awareness as well as preservation of these historical sites.
LatoniaSix · August 24, 2023 at 7:17 am
cat casino зеркало
http://www.detki-v-setke.ru/index.php?showuser=18714
Играя в Cat Casino, вы не только получаете незабываемые впечатления, но и имеете шанс стать частью большой и дружной команды. Мы ценим каждого нашего гостя, и поэтому предлагаем щедрые бонусы и акции. Наш VIP-клуб открывает двери в мир особых привилегий и бесконечных возможностей. С Cat Casino вы не просто игрок, вы становитесь частью семьи, где каждый найдет свою нишу в мире азарта и веселья.С Cat Casino вы получаете билет в мир, где каждый может стать Кэтом на крыше мира. Мы готовы подарить вам больше, чем просто игры. Это место, где каждый может стать частью истории азартных приключений, где ваше имя запомнится как главный герой барабанов.
ManuelGaw · August 24, 2023 at 7:29 am
Environmentally friendly dyes are used for coloring the toys oneworldmiami.com, which do not contain chemicals, therefore, the toys do not cause allergic reactions even in those people who are prone to permanent rashes.
LatoniaSix · August 24, 2023 at 7:32 am
cat casino онлайн
http://ba.rolka.me/viewtopic.php?id=4103
Не хотите скачивать? Не проблема! Cat Casino также предоставляет вам возможность играть онлайн, не загружая ничего на свое устройство. Просто пройдите регистрацию на официальном сайте, и вы окажетесь в виртуальной реальности Кэт Казино, где каждый клик мыши может повернуть ваш мир вверх дном.Cat Casino предоставляет широкий выбор игровых автоматов – от классических до современных, от простых до сложных. Каждый слот – это уникальный мир, где сокровища ждут своего обладателя. Скачай игровые автоматы на свое устройство и окунись в океан разнообразия и волнения.
Shawnpayon · August 24, 2023 at 7:41 am
brillx казино
Brillx
В 2023 году Brillx предлагает совершенно новые уровни азарта. Мы гордимся тем, что привносим инновации в каждый аспект игрового процесса. Наши разработчики работают над уникальными и захватывающими играми, которые вы не найдете больше нигде. От момента входа на сайт до момента, когда вы выигрываете крупную сумму на наших аппаратах, вы будете окружены неповторимой атмосферой удовольствия и удачи.Brillx Казино – это не просто обычное место для игры, это настоящий храм удачи. Вас ждет множество возможностей, чтобы испытать азарт в его самой изысканной форме. Будь то блеск и огонь аппаратов или адреналин в жилах от ставок на деньги, наш сайт предоставляет все это и даже больше.
DavidAsteT · August 24, 2023 at 7:52 am
Assistência técnica notebook, conserto de placa mãe em Florianópolis – Pessoal qualificado para consertar seu notebook, com garantia. Mais de 19 anos de experiência.
https://notebook-on.com.br/assistencia-tecnica-dell
Assistência técnica Dell em Florianópolis – Pessoal qualificado para consertar seu notebook
DavidAsteT · August 24, 2023 at 8:11 am
A neural network draws a woman
The neural network will create beautiful girls!
Geneticists are already hard at work creating stunning women. They will create these beauties based on specific requests and parameters using a neural network. The network will work with artificial insemination specialists to facilitate DNA sequencing.
The visionary for this concept is Alex Gurk, the co-founder of numerous initiatives and ventures aimed at creating beautiful, kind and attractive women who are genuinely connected to their partners. This direction stems from the recognition that in modern times the attractiveness and attractiveness of women has declined due to their increased independence. Unregulated and incorrect eating habits have led to problems such as obesity, causing women to deviate from their innate appearance.
The project received support from various well-known global companies, and sponsors readily stepped in. The essence of the idea is to offer willing men sexual and everyday communication with such wonderful women.
If you are interested, you can apply now as a waiting list has been created.
LatoniaSix · August 24, 2023 at 8:29 am
cat casino зеркало
https://forum.auto.ru/boardgames/8496/
Cat Casino заботится о вашей безопасности так же, как Кэт Казино заботится о своих маленьких мурлыках. Ваши данные и финансовые операции находятся под надежной защитой, благодаря нашей передовой технологии шифрования. Так что вы можете сосредоточиться только на одном — наслаждаться игрой и стремиться к победам.С Cat Casino вы получаете билет в мир, где каждый может стать Кэтом на крыше мира. Мы готовы подарить вам больше, чем просто игры. Это место, где каждый может стать частью истории азартных приключений, где ваше имя запомнится как главный герой барабанов.
LatoniaSix · August 24, 2023 at 8:44 am
казино cat коды
http://cs-online.ru/forum/index.php?showtopic=3039
С Cat Casino вы получаете билет в мир, где каждый может стать Кэтом на крыше мира. Мы готовы подарить вам больше, чем просто игры. Это место, где каждый может стать частью истории азартных приключений, где ваше имя запомнится как главный герой барабанов.Cat Casino — это не просто сайт для игры в азартные игры, это истинное шоу, где каждый спин на игровых автоматах может стать настоящим произведением искусства. В 2023 году мы снова удивляем своих гостей неординарной графикой и инновационными механиками игры. Это не просто казино, это виртуальная страна удовольствий, где каждый вращение барабана — это билет в мир фантазий и желаний.
kursy_Gox · August 24, 2023 at 9:13 am
https://kursy-online1.ru/
Oliver Moheda · August 24, 2023 at 10:18 am
This is really interesting, You’re a very professional blogger.
I’ve joined your feed and look ahead to in quest of extra of your great
post. Also, I’ve shared your web site in my social networks
業務用脱毛器ランキング · August 24, 2023 at 12:12 pm
I have been surfing online greater than three hours nowadays, yet I never
discovered any interesting article like yours. It is lovely worth enough for me.
Personally, if all webmasters and bloggers made good content material as you did, the internet might be much
more useful than ever before.
Robertdup · August 24, 2023 at 12:44 pm
маркетплейс косметологических услуг
n] · August 24, 2023 at 1:40 pm
We are a group of volunteers and starting a new scheme in our community.
Your website provided us with valuable information to work on.
You’ve done a formidable job and our whole community will be thankful to you.
Look into my web blog … n]
바이낸스 수수료 할인 · August 24, 2023 at 2:23 pm
Thanks for your marvelous posting! I seriously enjoyed
reading it, you happen to bee a great author.I will ensuhre that I bookmark your blog and will eventually come back in the foreseeable future.
I want to encourage yourself to continue your great job,
have a nice day!
My hokmepage :: 바이낸스 수수료 할인
DavidAsteT · August 24, 2023 at 2:39 pm
tips main game online
StevenFroni · August 24, 2023 at 3:06 pm
Бери и повторяй, заработок от 50 000 рублей. [url=https://vk.com/zarabotok_v_internete_dlya_mam]заработок через интернет[/url]
uborka_Nuh · August 24, 2023 at 3:35 pm
клининговая компания люберцы https://uborka-v-lubercah.ru/
HypeUnique · August 24, 2023 at 4:16 pm
whoah this weblog is great i really like reading your posts.
Stay up the great work! You recognize, a lot of persons are looking round for this information, you could help
them greatly.
Robertdup · August 24, 2023 at 4:24 pm
Азелаиновый пилинг— это процедура химического отшелушивания поверхностного слоя кожи, что способствует ее очищению и оздоровлению.
Данная методика отшелушивает ороговевшие клетки, помогает с лечением угревой сыпи, черных точек.
etechkKeymn · August 24, 2023 at 4:29 pm
At https://steamdesktopauthenticator.me/ you can download the desktop version of the Steam Authentication mobile app. The latest version on the site, which will ensure smooth operation with Steam.
dating review sites · August 24, 2023 at 4:51 pm
Hey would you mind letting me know which hosting company you’re working with?
I’ve loaded your blog in 3 different internet browsers
and I must say this blog loads a lot quicker
then most. Can you suggest a good hosting provider at a fair price?
Kudos, I appreciate it!
Check out my site – dating review sites
amaryl 2mg for sale · August 24, 2023 at 5:20 pm
cost of ceclor ceclor 500mg australia ceclor 500mg tablet
ulgakEmofs · August 24, 2023 at 5:30 pm
По ссылке https://play.google.com/store/apps/details?id=com.w1ndwaakers.ggg вы сможете сделать свои ставки в казино Вавада, которое пользуется огромной популярностью среди всех любителей азартных игр. Заведение работает на официальной основе, а потому получило лицензию. В коллекции несколько тысяч игр, среди которых блекджек, рулетка, покер, а также слоты. Кроме того, компания предлагает щедрую бонусную программу, а также оперативный вывод средств, быструю и дружелюбную службу поддержки.
dryusfurify · August 24, 2023 at 6:04 pm
На сайте https://venttehnica.ru/ вы сможете приобрести высокотехнологичный, качественный, надежный кондиционер с последующим монтажом. Кроме того, здесь есть и вентиляторы, отопительное оборудование, циклоны, дымососы, вентиляционные клапаны, приточные установки. Очень часто в магазине организуются акции, которые позволяют совершить приобретение по меньшей стоимости. В каталоге огромный выбор моделей на самый притязательный вкус. Системы устанавливаются как дома, так и в офисе, на промышленных предприятиях.
kornefaups · August 24, 2023 at 6:54 pm
На сайте https://1whirp.top/ вы сможете попробовать себя в самых разных развлечениях. Вам доступен кэшбэк в размере 30%, а также бонус. Перед вами живые дилеры, а также слоты, казино, в котором несколько тысяч игр, а также бесплатные турниры. Все это обрадует вас и принесет положительные эмоции вместе с улучшением материального положения. Зарегистрируйтесь прямо сейчас и воспользуйтесь всеми инструментами сайта. Об этом портале огромное количество положительных отзывов, потому как он действительно работает для вас и выплачивает средства на регулярной основе.
Keithknime · August 24, 2023 at 7:31 pm
lipitor generic cost: generic lipitor 10mg – lipitor india
ShawnDrash · August 24, 2023 at 8:30 pm
Vavada casino официальный сайт
https://penzu.com/p/467d486b
Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.Так что не упустите шанс войти в мир Вавада Казино и испытать удачу в играх, где каждый спин барабанов может изменить вашу судьбу. У нас есть все, что нужно для незабываемого азартного опыта. Не упустите свой шанс — вперед, к победам на Казино Вавада!
ShawnDrash · August 24, 2023 at 8:45 pm
Vavada casino официальный сайт
http://www.medgora.ru/users.php?m=details&id=112111
Полная версия игровых автоматов, предоставленная Казино Вавада, бесплатно открывает перед вами мир бескрайних возможностей. Играйте, ставьте, наслаждайтесь каждым вращением барабанов, ведь именно здесь сбываются мечты. Вавада Казино — это не просто онлайн-казино, это уникальная платформа, где каждый игрок может почувствовать себя настоящим победителем.Когда вы откроете для себя Казино Вавада, вы поймете, что это не просто игровой портал. Это мир, где реальность переплетается с виртуальностью, а Вавада становится проводником в мир увлекательных приключений и невероятных сюрпризов. Не пропустите шанс окунуться в водоворот страстей и азарта на страницах Vavada Casino. Войдите и дайте себе возможность стать частью этой захватывающей истории.
Davidvor · August 24, 2023 at 8:54 pm
Stumbled upon interesting material – I can’t help but recommend you to read https://clicktime.mybb.ru/
ShawnDrash · August 24, 2023 at 9:38 pm
Вавада казино онлайн
http://www.w201club.com/forum/memberlist.php?mode=viewprofile&u=44235
Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!Не забывайте, что Казино Вавада предлагает не только возможность играть на деньги, но и испытать удачу в бесплатных режимах. Это отличная возможность потренироваться перед серьезной игрой и раскрутить барабаны в слоты-онлайн в том режиме, который Вам по душе.
HectorMak · August 24, 2023 at 9:46 pm
Kudos, Plenty of stuff.
music essay writing service [url=https://quality-essays.com/]thesis paper for sale[/url] buy online essay [url=https://buyanessayscheaponline.com/]pay for essay online[/url] pay for essay review will writing service manchester [url=https://bestpaperwritingservice.com/]best paper writing service free[/url] cheap paper writing service [url=https://bestonlinepaperwritingservices.com/]us based research paper writing service[/url] best paper writing service
ShawnDrash · August 24, 2023 at 9:52 pm
Вавада казино сайт
https://www.pcweek.ua/forum/view_profile.php?UID=80543
Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.Не забывайте, что Казино Вавада предлагает не только возможность играть на деньги, но и испытать удачу в бесплатных режимах. Это отличная возможность потренироваться перед серьезной игрой и раскрутить барабаны в слоты-онлайн в том режиме, который Вам по душе.
Davidpuh · August 24, 2023 at 10:06 pm
payusainvest.com
voloddig · August 24, 2023 at 10:36 pm
На сайте https://rupinup.com/ вы сможете как следует развлечься и насладиться удивительными и интересными играми, которые подарят яркие эмоции, наслаждение от процесса. Перед вами огромное количество слотов, среди которых вы точно выберете то, чем развлечься. Обратите внимание на: Aviator, Hot Fruits, Lucky Joker, Book of OZ, Path Of Destiny. Все средства выплачиваются незамедлительно и в полном объеме. Организаторы постарались, а потому предлагают вам окунуться в удивительный мир развлечений на любой вкус.
RobertJuh · August 24, 2023 at 10:50 pm
онлайн казино на биткоин
https://t.me/s/bitkoin_kazino1
Виртуальное азартное веселье переплетается с инновационными технологиями, поднимая биткоин казино на новую ступень привлекательности в 2023 году. Онлайн казино на биткоин 2023 стало настоящим меккой для ценителей азарта, стремящихся к уникальному опыту и инновационным впечатлениям. Казино биткоин – это не просто платформа для развлечений, это оазис, где каждый эффективно сочетает азарт и потенциальную прибыль, завернутые в захватывающий блокчейн пакет.Играя в казино биткоин, вы ощутите адреналин и увлечение, которые оживают благодаря передовым технологиям и передаче стратегического контроля в ваши руки. Онлайн казино на биткоин 2023 предлагает увлекательные сражения с уникальными шансами на выигрыш, где каждый спин и ставка – это как решительный ход в шахматной партии. В этой эпохе биткоин казино, вы не просто наблюдатель, вы – стратег, ловко разыгрывающий свои карты на игровом столе инноваций.
RobertJuh · August 24, 2023 at 11:04 pm
биткоин казино
https://t.me/s/bitkoin_kazino1
Казино биткоин – это не только о играх и азарте, это и возможность погрузиться в увлекательную и динамичную вселенную, где биткоины становятся ключом к захватывающим приключениям. Онлайн казино на биткоин 2023 вдохновляет на исследования и освоение новых горизонтов, словно космический корабль, взлетающий к звездам. В этом мире биткоин казино, каждый игрок – это путешественник, открывающий неизведанные планеты удачи.И так, биткоин казино на пороге новой эры – эры, где виртуальное сливается с реальным, а азарт переплетается с инновациями. Онлайн казино на биткоин 2023 – это место, где каждый может стать частью увлекательной революции, где биты и байты ткаут волшебную паутину развлечения и возможностей. Казино биткоин становится платформой не только для азартных игр, но и для вдохновения, развития и смелых решений.
AntonioAleme · August 24, 2023 at 11:17 pm
https://misoprostol.guru/# Cytotec 200mcg price
buy cytotec pills [url=http://misoprostol.guru/#]buy cytotec online[/url] п»їcytotec pills online
www zoo xxx com · August 24, 2023 at 11:21 pm
Thank you for the auspicious writeup. It in fact was a amusement account it. Look advanced to far added agreeable from you! By the way, how can we communicate?
2007 nissan altima · August 24, 2023 at 11:39 pm
Very efficiently written information. It will be supportive to everyone who utilizes it, as well as yours
truly :). Keep doing what you are doing – can’r wait to
read more posts.
Here is my site; 2007 nissan altima
Georgeexorp · August 24, 2023 at 11:51 pm
http://lipitor.pro/# lipitor tabs
RobertJuh · August 25, 2023 at 12:01 am
казино биткоин
биткоин казино
Виртуальные ворота казино биткоин распахиваются перед гостями с насыщенным калейдоскопом игр, в которых каждая карта, крутящийся барабан и мелькающий символ – это шанс на великолепный выигрыш. Онлайн казино на биткоин 2023 – это как таинственная комбинация сейфа, где биты и монеты сливаются в виртуальное богатство. Ведь в сфере биткоин казино даже самая неприметная комбинация может стать билетом в мир больших возможностей.Играя в казино биткоин, вы ощутите адреналин и увлечение, которые оживают благодаря передовым технологиям и передаче стратегического контроля в ваши руки. Онлайн казино на биткоин 2023 предлагает увлекательные сражения с уникальными шансами на выигрыш, где каждый спин и ставка – это как решительный ход в шахматной партии. В этой эпохе биткоин казино, вы не просто наблюдатель, вы – стратег, ловко разыгрывающий свои карты на игровом столе инноваций.
RobertJuh · August 25, 2023 at 12:16 am
казино биткоин
https://t.me/s/bitkoin_kazino1
Погрузившись в мир казино биткоин, вы откроете для себя уникальные моменты и неожиданные сюрпризы, подобно археологу, раскрывающему долгожданные артефакты. Онлайн казино на биткоин 2023 предоставляет неограниченные возможности, словно экспедиция в поисках сокровищ, где каждый новый спин – это расшифровка кода, приближающая к заветной награде. И в этом мире биткоин казино, каждый игрок – как детектив, исследующий тайны и проницательно анализирующий ситуацию.Таким образом, биткоин казино продолжает приковывать внимание игроков, удерживая их в захватывающем водовороте инноваций и азарта. Онлайн казино на биткоин 2023 приглашает каждого на уникальное путешествие, где биты и монеты создают мелодию удачи, а возможности кроются за каждым углом экрана. Казино биткоин – ваш билет в мир волнения и бесконечных перспектив.
Michaelheisy · August 25, 2023 at 12:26 am
https://lipitor.pro/# generic lipitor 10mg
deminZep · August 25, 2023 at 1:03 am
On the site https://steamauthenticator.net/ you can download and read detailed instructions for installing the desktop emulator of the Steam mobile authentication application. Download the latest desktop authenticator from the website.
uborka_rhymn · August 25, 2023 at 1:15 am
уборка квартир после ремонта в москве цены https://uborka-posle-remonta-kvartiri.ru/
erugHauct · August 25, 2023 at 2:06 am
does medicare cover cialis ordine dei commercialisti liquid cialis price
Jamessoogs · August 25, 2023 at 2:20 am
investnews24.net
connectie · August 25, 2023 at 2:23 am
Do you have a spam problem on this website; I also am a blogger, and I was wondering
your situation; many of us have created some nice practices and we are looking to
swap techniques with others, please shoot me an email if interested.
강남쩜오 · August 25, 2023 at 2:46 am
What’s up, I wish for to subscribe for this weblog
to get hottest updates, thus where can i do it please assist.
kvortsTat · August 25, 2023 at 3:08 am
На сайте https://romanova-park-hotel.ru/ вы сможете забронировать номер в парк-отеле «Романова». Вас ожидают изысканные интерьеры, роскошный и чистый бассейн, вместительные, светлые номера. Это оптимальное решение для уютного и спокойного семейного отдыха. Забронировать номер вы сможете прямо на сайте, обозначив дату въезда и выезда, а также количество человек. Можно выбрать стандарт-мини, стандарт, а также стандарт плюс. На портале находятся цены и номера. В них есть все необходимое для того, чтобы ваш отдых точно удался.
CindyNIC · August 25, 2023 at 5:07 am
gama casino
http://www.figarohair.ru/conf/viewtopic.php?f=11&t=10603
Как только вы преодолеете порог Gama Casino, вы ощутите вибрацию азарта, словно планета азартных игр приветствует вас своими руками. Гама Казино создано для тех, кто стремится к большему, для искателей уникальных ощущений и неповторимых моментов.На страницах Gama Casino вы сможете играть бесплатно и наслаждаться моментом, пока удача раскрывает перед вами свои карты. Это не просто онлайн-казино, это гавань для тех, кто ценит азарт и комфорт. Гама Казино откроет вам двери в мир, где реальность переплетается с виртуальностью, а вы становитесь хозяином собственной удачи.
CindyNIC · August 25, 2023 at 5:21 am
казино gama онлайн
https://rheumotd.ru/forum/viewtopic.php?f=11&t=269217
Играть в Gama Casino – это не просто казино, это путешествие в мир азартных мечтаний, где каждый спин – это новый поворот в сюжете вашей игры. Игровые автоматы России откроют перед вами безграничные возможности для выигрыша и развлечения. Каждая машина в Gama Casino – это как глава в увлекательной книге, наполненной сюрпризами и азартом.Играть бесплатно в онлайн казино на русском языке – это не просто возможность попробовать свою удачу без риска, это способ окунуться в пучину азартных эмоций даже без вложений. Gama Casino предоставляет вам эту невероятную возможность. Гама Казино делает ставку на ваше удовольствие и комфорт, предлагая уникальный опыт игры.
deniskbeild · August 25, 2023 at 5:49 am
По ссылке https://play.google.com/store/apps/details?id=com.one1.l1ne вы сможете сделать ставки в популярной букмекерской конторе «Фонбет», которая начала свою деятельность в 1994 году. У букмекера огромное количество пунктов приема ставок, однако особой популярностью пользуется виртуальное казино. Важным преимуществом этой БК является то, что она предлагает широкую линию, включающую огромный выбор событий, включая и региональные игры, а также лив ставки. Есть возможность посмотреть матчи непосредственно на сайте.
Dustinacast · August 25, 2023 at 6:00 am
Работа в Европе
Информационно правовой портал о жизни и работе в странах Европы.
CindyNIC · August 25, 2023 at 6:17 am
гама казино
http://forum.anomalythegame.com/viewtopic.php?f=57&t=170071
Мы понимаем, что каждый игрок уникален, как отпечаток пальца, поэтому в Gama Casino вы найдете игры, специально отобранные для тех, кто стремится к большему. Гама Казино — это ваш путь к невероятным эмоциям и уникальным победам.Для тех, кто ценит возможность играть бесплатно, на русском языке и в уютной обстановке своего дома, Gama Casino — это подарок судьбы. Мы предлагаем вам насладиться всей палитрой азартных развлечений абсолютно бесплатно, не взирая на временные ограничения или же свои материальные возможности. Гама Казино делает акцент на равенстве игрового опыта для всех!
CindyNIC · August 25, 2023 at 6:32 am
gama casino официальный сайт
https://gti-club.ru/forum/showthread.php?t=58591
Приветствуем вас в виртуальном убежище азартных удовольствий — Gama Casino! Это не просто портал развлечений, это истинная сокровищница игровых наслаждений, доступных вам в любой уголок земного шара. Да, вы правильно услышали, здесь вы сможете найти вход на официальный сайт Гама Казино, который откроет перед вами дверь в захватывающий мир азарта и страстных ставок!Здесь, в уникальной вселенной Gama Casino, каждый клик мыши — это переход на новую ступень в сфере азарта. На портале Гама Казино вы найдете грандиозный выбор азартных игр, от классических до ультрасовременных. Кажется, что каждый игровой автомат в России ждет именно вас, чтобы воплотить в реальность самые невероятные сценарии победы.
Dustinacast · August 25, 2023 at 6:44 am
https://evromigracija.ru/
Информационно правовой портал о жизни и работе в странах Европы.
Frankvoile · August 25, 2023 at 6:49 am
отзывы AME Capitals
Frankvoile · August 25, 2023 at 7:13 am
https://www.nsllab.ru/2023/08/ame-capitals-mnenie-o-kompanii-na-sayte-amecapitals.com.html
RichardGeofe · August 25, 2023 at 7:58 am
Stumbled upon a captivating article Ц definitely take a look! http://horordark.ru/medservis-vash-postavshhik-nadezhnyih-resheniy-v-oblasti-meditsinskogo-oborudovaniya
ParkercoN · August 25, 2023 at 8:23 am
pokerdom официальный сайт скачать мобильную версию бесплатно
https://t.me/s/pokerdom_zerkalo_na_segodnya
Не упустите возможность стать частью уникальной азартной семьи PokerDom Casino. Мы создали для вас не просто игровое пространство, а целый мир эмоций и выигрышей. Скачайте клиент на ПК и вступите в азартное путешествие, где каждый спин барабанов — это шанс изменить свою судьбу. PokerDom Casino ждет вас прямо сейчас!Покердом Казино заботится о вашей безопасности и комфорте. Каждая ставка на лицензионных автоматах PokerDom Casino — это не просто риск, это ваш шанс доказать, что вы — настоящий азартный гуру. Мы гарантируем честность и прозрачность игры, чтобы ваш опыт был только положительным.
ParkercoN · August 25, 2023 at 8:38 am
скачать покердом на телефон
pokerdom зеркало
Скачайте клиент на ПК, чтобы войти в мир PokerDom Casino через портал азарта, распахнутый специально для вас. Это ваш билет в мир невероятных ставок, волнений и выигрышей. Насладитесь игрой с удовольствием и без задержек — наш клиент на ПК сделает все, чтобы ваше путешествие было максимально плавным.Не упустите возможность стать частью уникальной азартной семьи PokerDom Casino. Мы создали для вас не просто игровое пространство, а целый мир эмоций и выигрышей. Скачайте клиент на ПК и вступите в азартное путешествие, где каждый спин барабанов — это шанс изменить свою судьбу. PokerDom Casino ждет вас прямо сейчас!
CharlesNuh · August 25, 2023 at 9:23 am
Отзывы о брокере
ochkfTouts · August 25, 2023 at 9:28 am
At https://gllthub.com/Jessecar96/SteamDesktopAuthenticator/ you can download the desktop implementation of the Steam mobile authentication app. All distributions in one place.
ParkercoN · August 25, 2023 at 9:53 am
pokerdom официальный сайт скачать мобильную версию
pokerdom зеркало
Скачайте клиент на ПК, чтобы войти в мир PokerDom Casino через портал азарта, распахнутый специально для вас. Это ваш билет в мир невероятных ставок, волнений и выигрышей. Насладитесь игрой с удовольствием и без задержек — наш клиент на ПК сделает все, чтобы ваше путешествие было максимально плавным.Лицензионные автоматы PokerDom Casino — это как сокровищница пирата, полная неожиданных сокровищ. Ваш путь к богатству начинается с выбора автомата. Наши лицензионные автоматы Покердом Казино разнообразны как множество жизненных сюжетов. От арктических приключений до дерзких космических путешествий, у нас есть все!
james webb telescope images download · August 25, 2023 at 10:25 am
Excellent post. I used to be checking constantly this weblog and
I’m impressed! Extremely useful info specifically the
closing phase 🙂 I maintain such info much. I used to be seeking this certain information for a very lengthy time.
Thank you and good luck.
TimothyLiz · August 25, 2023 at 10:27 am
http://msdiplom.ru/readyi2a1a1.asp@predmet=11.html
TimothyLiz · August 25, 2023 at 10:46 am
http://msdiplom.ru/readyi2a1a1.asp@predmet=51.html
AaronDuh · August 25, 2023 at 10:48 am
kraken рынок
DavidWek · August 25, 2023 at 11:09 am
регистрация кэт казино
AaronDuh · August 25, 2023 at 11:10 am
купить мефедрон
DavidWek · August 25, 2023 at 11:29 am
официальный сайт кэт казино
AaronDuh · August 25, 2023 at 11:32 am
кракен даркнет ссылка на сайт
AaronDuh · August 25, 2023 at 11:55 am
купить меф закладка
генератор обратных ссылок бесплатно · August 25, 2023 at 11:55 am
Статейное и ссылочное продвижение.
В наше время, практически
каждый человек пользуется интернетом.
С его помощью возможно
отыскать любую информацию из различных
интернет-источников и поисковых
систем.
Для кого-то личный сайт — это хобби.
Однако, большая часть используют созданные проекты для дохода и привлечение прибыли.
У вас имеется личный сайт и вы желаете привлечь на него максимум визитёров, но
не понимаете с чего начать?
Обратитесь к нам! Мы поможем!
генератор обратных ссылок бесплатно
AaronDuh · August 25, 2023 at 12:18 pm
kraken ссылка зеркало
Robertdup · August 25, 2023 at 12:24 pm
Изготавливаем мебель на заказ на собственном производстве с 1996 года для любых интерьеров под ключ:
мебель для кухни, гардеробной, детской, гостиной и любых других помещений.
hevtsmet · August 25, 2023 at 12:50 pm
На сайте https://hotel-familyresort.ru/ вы сможете забронировать номер в отеле «Family Resort», который находится в Евпатории. Это место отличается комфортным расположением, высококлассным уровнем обслуживания. Все эти моменты сделают отдых невероятно приятным и удивительным. Вас ожидает зал питания, бассейн, а также детская площадка, пляж, на котором есть все, что нужно. Регулярно проходят анимационные шоу-программы. Отдых в этом месте идеально подходит для семьи. Здесь имеется все, что нужно для этого. При необходимости предоставляется трансфер.
DavidAsteT · August 25, 2023 at 1:01 pm
https://www.victoria-gold.com/Златни-бижута/златни-гривни
Clydekaf · August 25, 2023 at 1:09 pm
ремонт фундамента дома
TimothyLiz · August 25, 2023 at 1:52 pm
http://msdiplom.ru/readyi2a1a1.asp@predmet=21.html
Kristenbog · August 25, 2023 at 1:54 pm
cat casino промокоды 2023
https://www.tppm.by/service/forum/index.php?PAGE_NAME=profile_view&UID=55827
Что делает Cat Casino столь особенным? Это не просто портал, это врата в мир максимальных возможностей и волнения. Широкий ассортимент игровых автоматов, представленных на официальном сайте Cat Casino, подарит тебе уникальные эмоции от игры. Играй онлайн, скачивай слоты – выбор за тобой!Особенностью Cat Casino является возможность скачать в 2023 году уникальное приложение, погрузиться в виртуальное казино в любое удобное для вас время. С Cat Casino, ваше устройство станет горячей точкой азартного влечения. Забудьте о скучных моментах ожидания — с Cat Casino, мир игры всегда в вашем кармане, готовый подарить азарт и адреналин, когда бы вы ни пожелали.
Kristenbog · August 25, 2023 at 2:09 pm
cat casino сайт
https://partnerkin.com/forum/3/admitad_ne_platit
Ощути магию азарта в каждом вращении барабана. Cat Casino – это не просто место, где можно играть в игровые автоматы, это мир, который оживает с каждым кликом. Каждый слот – это история, которая разворачивается перед твоими глазами, и ты можешь стать ее главным героем.С Cat Casino, Кэт Казино, каждый день – это новая возможность испытать удачу на вкус. Играй онлайн, скачивай слоты – выбор за тобой! Мы создали удобный интерфейс, чтобы ты мог сосредоточиться только на игре. Никаких лишних забот, только азарт и волнение.
TimothyLiz · August 25, 2023 at 2:22 pm
http://msdiplom.ru/readyi2a1a1.asp@predmet=221.html
LeslieCox · August 25, 2023 at 2:34 pm
Encountered a captivating article, I propose you read https://wiuwi.com/blogs/19923/Discover-Hidden-Gems-The-Most-Underrated-Videos-on-This-Site
TimothyLiz · August 25, 2023 at 2:51 pm
http://msdiplom.ru/readyi2a1a1.asp@predmet=97.html
Kristenbog · August 25, 2023 at 3:05 pm
cat casino игровые автоматы
https://500px.com/p/fovomaf?view=photos
Добро пожаловать на карнавал азарта и веселья — Cat Casino, где игра становится истинным искусством развлечения! Если вам нужно скачать уникальные игровые автоматы и погрузиться в мир волнения и возможностей, то Кэт Казино готово стать вашим верным спутником в этом захватывающем путешествии.С Cat Casino, Кэт Казино, каждый день – это новая возможность испытать удачу на вкус. Играй онлайн, скачивай слоты – выбор за тобой! Мы создали удобный интерфейс, чтобы ты мог сосредоточиться только на игре. Никаких лишних забот, только азарт и волнение.
DavidAsteT · August 25, 2023 at 3:12 pm
DAFTAR KOINSLOT
Unveiling the Thrills of KOIN SLOT: Embark on an Adventure with KOINSLOT Online
Abstract: This article takes you on a journey into the exciting realm of KOIN SLOT, introducing you to the electrifying world of online slot gaming with the renowned platform, KOINSLOT. Discover the adrenaline-pumping experience and how to get started with DAFTAR KOINSLOT, your gateway to endless entertainment and potential winnings.
KOIN SLOT: A Glimpse into the Excitement
KOIN SLOT stands at the intersection of innovation and entertainment, offering a diverse range of online slot games that cater to players of various preferences and levels of experience. From classic fruit-themed slots that evoke a sense of nostalgia to cutting-edge video slots with immersive themes and stunning graphics, KOIN SLOT boasts a collection that ensures an enthralling experience for every player.
Introducing SLOT ONLINE KOINSLOT
SLOT ONLINE KOINSLOT introduces players to a universe of gaming possibilities that transcend geographical boundaries. With a user-friendly interface and seamless navigation, players can explore an array of slot games, each with its unique features, paylines, and bonus rounds. SLOT ONLINE KOINSLOT promises an immersive gameplay experience that captivates both newcomers and seasoned players alike.
DAFTAR KOINSLOT: Your Gateway to Adventure
Getting started on this adrenaline-fueled journey is as simple as completing the DAFTAR KOINSLOT process. By registering an account on the KOINSLOT platform, players unlock access to a realm where the excitement never ends. The registration process is designed to be user-friendly and hassle-free, ensuring that players can swiftly embark on their gaming adventure.
Thrills, Wins, and Beyond
KOIN SLOT isn’t just about the thrills; it’s also about the potential for substantial winnings. Many of the slot games offered through KOINSLOT come with varying levels of volatility, allowing players to choose games that align with their risk tolerance and preferences. The allure of potentially hitting that jackpot is a driving force that keeps players engaged and invested in the gameplay.
Kristenbog · August 25, 2023 at 3:20 pm
cat casino промокод для новых игроков
https://www.fishing-price.ru/user/6187#
Играя в Cat Casino, Кэт Казино, вы попадаете в атмосферу совершенно новых ощущений. Это не просто казино, это путешествие в мир невероятных приключений. Игровые автоматы на Cat Casino созданы с огромной любовью к деталям, где каждая вращающаяся барабана — как страница в увлекательной книге. Вас ждут великолепные графика, уникальные звуковые эффекты и увлекательные сюжеты.Как скачать Cat Casino и начать веселье на полную катушку? Процесс установки наше приложение на ваше устройство быстр и прост. За считанные минуты вы будете готовы к захватывающим приключениям наших игровых автоматов. А для тех, кто не хочет загружать ничего дополнительно, предлагаем вариант игры онлайн, прямо на нашем сайте. С Cat Casino играть в любимые азартные игры становится ещё удобнее.
https://fisher-strand.thoughtlanes.net/movie-watching-reimagined-innovative-ways-to-enjoy-your-films-1692955860 · August 25, 2023 at 3:29 pm
An outstanding share! I have just forwarded
this onto a co-worker who had been conducting a little
homework on this. And he in fact ordered me dinner simply because I discovered
it for him… lol. So let me reword this…. Thank YOU for
the meal!! But yeah, thanx for spending time to discuss this subject here on your website.
blackman · August 25, 2023 at 3:37 pm
Hurrah, that’sѡhat I ᴡas lookіng for, what а data!
present һere at this weblog, thankks admin of this site.
evgenEmany · August 25, 2023 at 4:10 pm
На сайте https://download-stickers.com/ находится огромная коллекция стикеров для таких социальных сетей, как: Telegram, WhatsApp. Все это вы сможете скачать абсолютно бесплатно и в любое время. Добавьте в свой мессенджер все, что хотите и начинайте общаться с друзьями на самую разную тему. Теперь общение будет намного увлекательней, интересней и необычней. При этом вы сможете выразить свои эмоции при помощи смешных картинок. Найдите то, что вам необходимо, используя ключевые слова.
ubosfsen · August 25, 2023 at 5:18 pm
На сайте https://nnprom.ru вы сможете заказать решетчатый настил от производителя. Предприятие выпускает такую продукцию, как сварной решетчатый, прессованный настил. Кроме того, разрабатывает нестандартную продукцию из этого материала. В каталоге внушительный ассортимент вариантов, где вы сможете ознакомиться с различными характеристиками, описанием товаров. Вся продукция создается из качественных, проверенных материалов, которые невосприимчивы к воздействию окружающей среды.
Kpdcrj · August 25, 2023 at 5:45 pm
order generic dipyridamole 25mg buy generic pravastatin online purchase pravastatin
AlbertCus · August 25, 2023 at 6:05 pm
Скачать казино Покердом
https://t.me/s/skachat_pokerdom_na_android
Искусство покера воплощается в захватывающем приложении, доступном для скачивания на андроид – Скачать Покердом на деньги на андроид. Это не просто приложение, это вратарь в мир азартных побед и стратегических решений. Если вы ищете способ сделать свои дни более интересными и поддать им виток азарта, Скачать Покердом на деньги на андроид – ваш выбор.Таким образом, Скачать Покердом на деньги на андроид – это как капля адреналина, добавленная в повседневную рутину. Покердом на андроид – это как встреча с удачей, которая может стать вашей верной спутницей. Если вы готовы попробовать свои силы в мире азартных испытаний, то Скачать Покердом на деньги на андроид – ваш следующий шаг к захватывающей игре и волнующим победам.
AlbertCus · August 25, 2023 at 6:19 pm
Скачать казино Покердом
https://t.me/s/skachat_pokerdom_na_android
Когда речь заходит о возможности попытать удачу и пополнить баланс, Скачать Покердом на деньги на андроид – это как стартовый выстрел в мире азартных приключений. Среди разнообразия азартных приложений, Покердом на андроид выделяется, как бриллиант среди обыденных камней. Это не только возможность испытать свои навыки в покере, но и попробовать свою удачу на деньги, ведь в этом приложении каждая партия – это как великолепная стратегическая схватка.Иногда жизнь сама по себе игра, и в этой игре каждый ход важен. Приложение Покердом на андроид предоставляет вам карту в этот мир, где ваши решения могут стать ключом к увлекательным приключениям и даже финансовым успехам. Скачать Покердом на деньги на андроид – это как приглашение на захватывающую вечеринку, где каждая ставка – это новая история, а каждый выигрыш – незабываемое воспоминание.
uborka_jef · August 25, 2023 at 6:47 pm
клининговая компания в балашихе https://uborka-v-balashihe.ru/
HectorMak · August 25, 2023 at 7:08 pm
You actually explained this really well!
what is the best essay writing service [url=https://customthesiswritingservice.com/]service learning thesis statement[/url] thesis on service delivery and customer satisfaction pdf [url=https://writingthesistops.com/]thesis statements[/url] write your thesis statement dating site profile writing service [url=https://researchproposalforphd.com/]term paper writing service[/url] where to buy research papers online [url=https://writingresearchtermpaperservice.com/]term paper help[/url] term paper length
pinupuajeczin · August 25, 2023 at 8:57 pm
[url=https://www.pinupuajeczin.dp.ua]www.pinupuajeczin.dp.ua[/url]
В ТЕЧЕНИЕ казино Pin-Up Survive является сильнее 100 игр всего живыми дилерами, включая блэкджек, покер, рулетку, город, Андар Бахар и еще Тин Патти.
https://pinupuajeczin.dp.ua
bokep miss kocok · August 25, 2023 at 9:07 pm
Ηey there! I’ve bеen reading youг weblⲟg for a whiⅼe now and finaply got the
courage to go aheɑd and give yoᥙ a sshout
out feom New Caney Tx! Jusst wanted to say keep ᥙp the good job!
daachka.ru · August 25, 2023 at 10:41 pm
Greate article. Keep writing such kind of information on your blog. Im really impressed by your blog.
CindyNIC · August 25, 2023 at 10:52 pm
казино gama вход
https://fanfilms.ru/forum/viewtopic.php?p=19539
Gama Casino — это не просто игорная площадка, это ворота в мир, где реальность переплетается с виртуальным, а азарт со стратегией. Откройте для себя настоящий калейдоскоп разнообразных игр, представленных на страницах Гама Казино. У нас вы найдете игровые автоматы, способные увлечь вас в незабываемое путешествие по миру азарта.Играть в Gama Casino – это не просто казино, это путешествие в мир азартных мечтаний, где каждый спин – это новый поворот в сюжете вашей игры. Игровые автоматы России откроют перед вами безграничные возможности для выигрыша и развлечения. Каждая машина в Gama Casino – это как глава в увлекательной книге, наполненной сюрпризами и азартом.
pinupuajekzin · August 25, 2023 at 11:02 pm
[url=https://pinupuajekzin.dp.ua/]pinupuajekzin.dp.ua[/url]
ПІН АП Казіно – одне буква найпопулярніших казино у всьому свібукваі. Його початки були в течение дальнему 1996 році, а на сьогодні це одне з найпопулярніших толпа Інтернету.
pinupuajekzin.dp.ua
CindyNIC · August 25, 2023 at 11:06 pm
gama casino играть
http://forum.dozory.ru/bbs/profile.php?mode=viewprofile&u=1977629
Так что, готовы взять свою ставку удачи? Gama Casino с удовольствием подарит вам билет в мир азартных впечатлений. Входите на официальный сайт Гама Казино и дайте себе шанс испытать дыхание настоящего азарта, словно вы впервые прокладываете путь в неизведанные земли возможностей.Итак, если вы ищете вход на официальный сайт, где можно играть бесплатно и на русском языке, ваш выбор однозначно — Gama Casino. Гама Казино сделает ваше путешествие в мир азарта по-настоящему незабываемым. Присоединяйтесь к нам сейчас и откройте дверь в азартное будущее прямо сейчас!
pinupuajeczin · August 25, 2023 at 11:25 pm
[url=https://pinupuajeczin.dp.ua/slots/]pinupuajeczin.dp.ua/slots/[/url]
НА толпа Pin-Up Contemporary есть более 100 игр со живыми дилерами, начиная блэкджек, хорс, рулетку, город, Андар Бахар а также Тин Патти.
pinupuajeczin.dp.ua/slots/book-of-champions/
Robertdup · August 25, 2023 at 11:55 pm
альтера терапия
CindyNIC · August 25, 2023 at 11:59 pm
gama casino онлайн
http://www.microstock.ru/forum/member.php?u=223195
Gama Casino — это не просто игорная площадка, это ворота в мир, где реальность переплетается с виртуальным, а азарт со стратегией. Откройте для себя настоящий калейдоскоп разнообразных игр, представленных на страницах Гама Казино. У нас вы найдете игровые автоматы, способные увлечь вас в незабываемое путешествие по миру азарта.Игровые автоматы в России набирают обороты благодаря Gama Casino. Наша платформа собрала в себе богатство игровых вариаций — от традиционных классических слотов до передовых трехмерных автоматов. Это как путешествие во времени, где вы можете выбрать, с какой эпохой вы хотите встретиться, и Гама Казино сделает всё остальное.
Michaelheisy · August 26, 2023 at 12:13 am
https://misoprostol.guru/# cytotec buy online usa
CindyNIC · August 26, 2023 at 12:13 am
казино gama
https://gostdep.ru/user/weubkub
Играя в Гама Казино, вы обнаружите, что это не просто место для испытания удачи. Это космос, где каждый спин на игровых автоматах — это возможность покорить вершину джекпота. Каждая мелодия, каждая крупье, словно созданы, чтобы погрузить вас в атмосферу истинного казино.Мы понимаем, что в мире азарта важна не только выигрышная стратегия, но и атмосфера игры. Поэтому Gama Casino создает вокруг вас атмосферу непередаваемого азарта и волнения. Это как таинственная маскарадная вечеринка, на которой каждый вращающийся барабан — это шаг к открытию новых миров. И Гама Казино — ваш проводник на этой захватывающей вечеринке!
dog xxxx · August 26, 2023 at 12:17 am
Very rapidly this site will be famous among all blogging viewers, due to it’s pleasant articles
Georgeexorp · August 26, 2023 at 12:45 am
http://ciprofloxacin.ink/# antibiotics cipro
pinupuajekzin · August 26, 2023 at 1:01 am
[url=https://pinupuajekzin.dp.ua/]pinupuajekzin.dp.ua[/url]
БУКВАІН АП Казіхотя – одне з найпопулярніших казино язык всьому свібукваі. Його початки були в отдаленному 1996 році, а сверху сьогодні це одне буква найпопулярніших казино Інтернету.
pinupuajekzin.dp.ua
pinupuajekzin · August 26, 2023 at 2:45 am
[url=https://pinupuajekzin.dp.ua/]www.pinupuajekzin.dp.ua[/url]
Зареєструвавшись в течение ПІБУКВА АП Казіно, ви маєэти доступ ут цьому розділу согласен допомогою в единственном числе натискання кнопки. Або живете ви можете перескочить до гри безпосередньо з домашньої сторінки согласен допомогою подвійного натискання это по его частиіажної кнопки.
http://www.pinupuajekzin.dp.ua
livanorek · August 26, 2023 at 2:57 am
На сайте https://shashlychnik.ru/ вы сможете заказать шашлыки и барбекю с приготовлением на месте. Заказать шашлычника, повара, мангальщика на выезд очень просто. Для любого мероприятия наши высококлассные шашлычники приготовят блюда на мангале, в казане, тандыр, барбекю печах или на вертеле. Осуществляем приготовление с выездом до 200 километров от МКАД.
yansHauct · August 26, 2023 at 3:08 am
reputable canadian mail order pharmacies best over the counter viagra substitute cialis pills amazon
HarryPaype · August 26, 2023 at 3:26 am
Покердом бездепозитный бонус
онлайн казино на биткоин
Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!
HarryPaype · August 26, 2023 at 3:41 am
Покердом бездепозитный бонус 1000
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.Виртуозно разыгрывайте свои карты и стратегические ходы, используя свой Покердом бездепозитный бонус 1000. В этой азартной игре каждый ход – как важное решение в шахматной партии, и только вы вольны выбирать, какой путь в азартной стратегии следует выбрать. Даже самый маленький бонус может стать ключом к большим победам, а Покердом бездепозитный бонус 1000 – это ваш персональный билет к успеху!
evgenSex · August 26, 2023 at 4:15 am
На сайте https://ki-news.ru вы сможете ознакомиться с полезными, актуальными и свежими новостями Краснодара. Так вы узнаете о том, как правильно выбрать арбуз, по каким критериям это нужно сделать. Есть информация о том, какие льготы полагаются многодетным семьям, о курортах Кубани, о том, где вы сможете погулять с собаками. Имеется и раздел с наиболее актуальными новостями, которые касаются жителей города. Регулярно на сайте появляются новые, свежие данные. С ними необходимо знакомиться и вам.
HarryPaype · August 26, 2023 at 4:38 am
Казино Покердом промокод
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Любите игру в покер? Хотите ощутить вкус победы и азарта, не вкладывая свои сбережения? Тогда Покердом бездепозитный бонус 1000 – это ваш билет в мир азартных возможностей! Смело присоединяйтесь к игре в уникальном онлайн казино Покердом с промокодом на бездепозитный бонус и получите свои первые 1000 единиц азартного капитала!Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.
HarryPaype · August 26, 2023 at 4:52 am
Покердом бездепозитный бонус
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Покердом бездепозитный бонус 1000 – это как магический ключ к виртуальному казино, который отпирает дверь к миру высоких ставок и больших побед. Начните свой путь в азартной игре с бонуса без депозита и откройте для себя все прелести игры в покер с невероятными возможностями для выигрыша. Да, это не сон, это реальность – Покердом бездепозитный бонус 1000 ждет вас!
บาคาร่า · August 26, 2023 at 6:23 am
An impressive share! I have just forwarded this onto a colleague
who had been doing a little research on this. And he
in fact ordered me dinner because I found it for him…
lol. So let me reword this…. Thank YOU for the meal!!
But yeah, thanks for spending the time to
talk about this topic here on your blog.
pinupuajekzin · August 26, 2023 at 6:42 am
[url=https://pinupuajekzin.dp.ua/]www.pinupuajekzin.dp.ua[/url]
Зареєструвавшись в течение ПІН АП Казіно, ви миллиамперєэти доступ до цьому розділу согласен допомогою раза натискання кнопки. Омовение ж ви в силах передаться ут гри безпосередньо буква домашньої сторінки за допомогою подвійного натискання это по его частиіажної кнопки.
http://www.pinupuajekzin.dp.ua
DavidAsteT · August 26, 2023 at 7:58 am
Selamat datang di Surgaslot !! situs slot deposit dana terpercaya nomor 1 di Indonesia. Sebagai salah satu situs agen slot online terbaik dan terpercaya, kami menyediakan banyak jenis variasi permainan yang bisa Anda nikmati. Semua permainan juga bisa dimainkan cukup dengan memakai 1 user-ID saja.
Surgaslot sendiri telah dikenal sebagai situs slot tergacor dan terpercaya di Indonesia. Dimana kami sebagai situs slot online terbaik juga memiliki pelayanan customer service 24 jam yang selalu siap sedia dalam membantu para member. Kualitas dan pengalaman kami sebagai salah satu agen slot resmi terbaik tidak perlu diragukan lagi.
Surgaslot merupakan salah satu situs slot gacor di Indonesia. Dimana kami sudah memiliki reputasi sebagai agen slot gacor winrate tinggi. Sehingga tidak heran banyak member merasakan kepuasan sewaktu bermain di slot online din situs kami. Bahkan sudah banyak member yang mendapatkan kemenangan mencapai jutaan, puluhan juta hingga ratusan juta rupiah.
Kami juga dikenal sebagai situs judi slot terpercaya no 1 Indonesia. Dimana kami akan selalu menjaga kerahasiaan data member ketika melakukan daftar slot online bersama kami. Sehingga tidak heran jika sampai saat ini member yang sudah bergabung di situs Surgaslot slot gacor indonesia mencapai ratusan ribu member di seluruh Indonesia
LAOPR5T · August 26, 2023 at 8:31 am
Good day I am so grateful I found your webpage,
I really found you by accident, while I was browsing on Askjeeve for something
else, Anyways I am here now and would just like
to say thanks for a incredible post and a all round exciting
blog (I also love the theme/design), I don’t have time to
read it all at the minute but I have saved it and also added in your RSS
feeds, so when I have time I will be back to read
much more, Please do keep up the great b.
เว็บสล็อต · August 26, 2023 at 8:48 am
เว็บสล็อตWe are ready to serve all gamblers with a complete range of online
casinos that are easy to play for real money.
Find many betting games, whether popular games such as baccarat, slots, blackjack, roulette and dragon tiger.
Get experience Realistic gambling as if playing at a world-class casino online.
Our website is open for new members 24 hours a day.
Hello there! I could have sworn I’ve been to this website before but after browsing
through some of the post I realized it’s new
to me. Nonetheless, I’m definitely delighted I found it
and I’ll be bookmarking and checking back frequently!
remeetoori · August 26, 2023 at 9:41 am
На сайте https://rukino.org/ вы найдете огромное количество русских фильмов, а также сериалов, которые понравятся своей постановкой, интересным, завораживающим сюжетом. Игра актеров также вне конкуренции. Все сериалы о любви, светлых чувствах, интересных мгновениях, а потому понравятся всем, кто увлекается кинематографом. Регулярно появляются новинки, с которыми необходимо ознакомиться и вам. Заходите на этот портал и вы, чтобы интересно провести время. Из большого выбора фильмов вы найдете тот, который оставит в вашем сердце след.
Jasoncaphy · August 26, 2023 at 10:47 am
Found a captivating read that I’d like to recommend to you https://www.pickmemo.com/read-blog/196033
HectorMak · August 26, 2023 at 12:37 pm
You actually reported that terrifically.
best essay writing service in pakistan [url=https://argumentativethesis.com/]customer service thesis[/url] persuasive essay thesis statements [url=https://bestmasterthesiswritingservice.com/]define thesis[/url] thesis statement about depression architecture essay writing service [url=https://dissertationwritingtops.com/]buy a dissertation[/url] dissertation writing services reviews [url=https://helpwritingdissertation.com/]phd thesis[/url] best dissertation helper
pull a part el paso texas · August 26, 2023 at 2:37 pm
You can certainly see your expertise within the work you write.
The sector hopes for even more passionate writers such as you who
are not afraid to mention how they believe. Always follow your heart.
Also visit my webpage pull a part el paso texas
DavidAsteT · August 26, 2023 at 3:40 pm
KOIN SLOT
Unveiling the Thrills of KOIN SLOT: Embark on an Adventure with KOINSLOT Online
Abstract: This article takes you on a journey into the exciting realm of KOIN SLOT, introducing you to the electrifying world of online slot gaming with the renowned platform, KOINSLOT. Discover the adrenaline-pumping experience and how to get started with DAFTAR KOINSLOT, your gateway to endless entertainment and potential winnings.
KOIN SLOT: A Glimpse into the Excitement
KOIN SLOT stands at the intersection of innovation and entertainment, offering a diverse range of online slot games that cater to players of various preferences and levels of experience. From classic fruit-themed slots that evoke a sense of nostalgia to cutting-edge video slots with immersive themes and stunning graphics, KOIN SLOT boasts a collection that ensures an enthralling experience for every player.
Introducing SLOT ONLINE KOINSLOT
SLOT ONLINE KOINSLOT introduces players to a universe of gaming possibilities that transcend geographical boundaries. With a user-friendly interface and seamless navigation, players can explore an array of slot games, each with its unique features, paylines, and bonus rounds. SLOT ONLINE KOINSLOT promises an immersive gameplay experience that captivates both newcomers and seasoned players alike.
DAFTAR KOINSLOT: Your Gateway to Adventure
Getting started on this adrenaline-fueled journey is as simple as completing the DAFTAR KOINSLOT process. By registering an account on the KOINSLOT platform, players unlock access to a realm where the excitement never ends. The registration process is designed to be user-friendly and hassle-free, ensuring that players can swiftly embark on their gaming adventure.
Thrills, Wins, and Beyond
KOIN SLOT isn’t just about the thrills; it’s also about the potential for substantial winnings. Many of the slot games offered through KOINSLOT come with varying levels of volatility, allowing players to choose games that align with their risk tolerance and preferences. The allure of potentially hitting that jackpot is a driving force that keeps players engaged and invested in the gameplay.
Kristenbog · August 26, 2023 at 3:40 pm
cat casino промокод для новых игроков
https://chesspro.ru/guestnew/looknullmessage/?themeid=49&id=19&page=7777&indown=1
Скачать игровые автоматы на Cat Casino — это как открыть сундук с сокровищами у древнего пирата. Кэт Казино дарит вам этот ключ к виртуальной роскоши, который вас унесет в мир ярких красок и звуков, мир, где каждый барабан может стать вашим верным спутником. От бескрайних просторов космоса до забытых храмов древних цивилизаций, каждая игра на Cat Casino — это отдельная история, написанная специально для вас.С Cat Casino, Кэт Казино, каждый день – это новая возможность испытать удачу на вкус. Играй онлайн, скачивай слоты – выбор за тобой! Мы создали удобный интерфейс, чтобы ты мог сосредоточиться только на игре. Никаких лишних забот, только азарт и волнение.
ford f150 used for sale · August 26, 2023 at 5:10 pm
I like this post, enjoyed this one thanks
for posting.
my web blog – ford f150 used for sale
2001 bmw 330i · August 26, 2023 at 5:43 pm
We are a group of volunteers and starting a new scheme in our community.
Your web site provided us with valuable info to work on. You have done a formidable job and our entire community will be grateful to you.
Also visit my web site; 2001 bmw 330i
DonaldAtono · August 27, 2023 at 1:48 am
invest-company.net
skmqHauct · August 27, 2023 at 2:33 am
cialis tablete srbija cialis20tadalafil2022 com cialis indigestion remedy costco pharmacy cialis cost
ohay.tv · August 27, 2023 at 4:17 am
Fabulous, what a web site it is! This web site presents useful data to us,
keep it up.
DavidAsteT · August 27, 2023 at 4:44 am
Unveiling the Thrills of KOIN SLOT: Embark on an Adventure with KOINSLOT Online
Abstract: This article takes you on a journey into the exciting realm of KOIN SLOT, introducing you to the electrifying world of online slot gaming with the renowned platform, KOINSLOT. Discover the adrenaline-pumping experience and how to get started with DAFTAR KOINSLOT, your gateway to endless entertainment and potential winnings.
KOIN SLOT: A Glimpse into the Excitement
KOIN SLOT stands at the intersection of innovation and entertainment, offering a diverse range of online slot games that cater to players of various preferences and levels of experience. From classic fruit-themed slots that evoke a sense of nostalgia to cutting-edge video slots with immersive themes and stunning graphics, KOIN SLOT boasts a collection that ensures an enthralling experience for every player.
Introducing SLOT ONLINE KOINSLOT
SLOT ONLINE KOINSLOT introduces players to a universe of gaming possibilities that transcend geographical boundaries. With a user-friendly interface and seamless navigation, players can explore an array of slot games, each with its unique features, paylines, and bonus rounds. SLOT ONLINE KOINSLOT promises an immersive gameplay experience that captivates both newcomers and seasoned players alike.
DAFTAR KOINSLOT: Your Gateway to Adventure
Getting started on this adrenaline-fueled journey is as simple as completing the DAFTAR KOINSLOT process. By registering an account on the KOINSLOT platform, players unlock access to a realm where the excitement never ends. The registration process is designed to be user-friendly and hassle-free, ensuring that players can swiftly embark on their gaming adventure.
Thrills, Wins, and Beyond
KOIN SLOT isn’t just about the thrills; it’s also about the potential for substantial winnings. Many of the slot games offered through KOINSLOT come with varying levels of volatility, allowing players to choose games that align with their risk tolerance and preferences. The allure of potentially hitting that jackpot is a driving force that keeps players engaged and invested in the gameplay.
HectorMak · August 27, 2023 at 5:58 am
Useful material. With thanks.
professional resume writing service in pittsburgh pa [url=https://essaypromaster.com/]how to write an abstract for a research paper[/url] professional term paper writers [url=https://paperwritingservicecheap.com/]college papers for sale[/url] help me write my paper online essay writing service review [url=https://essaytyperhelp.com/]college essays help[/url] help with writing essays [url=https://helptowriteanessay.com/]how to write a college essay[/url] help writing essays for college
zippo navy ship lighters · August 27, 2023 at 1:51 pm
Welcome to Vintage Belt Buckles and Bolo Ties! We hope you are having a nice day!
We want to share some of the cool vintage items we have,
including belt buckles, bolo ties, zippo navy ship lighters,
copper and brass items, sterling silver items, and more!
Take a look at some of our wholesale belt buckles and bolo ties!
Vintagebeltbucklesandboloties.com
Thank you very much!
There is also an online shop at:
Visit http://www.etsy.com/shop/VintageCopperAndMore
RuthiedaP · August 27, 2023 at 9:32 pm
казино cat бездепозитный бонус код
http://www.gestalt-therapy.ru/forum/profile.php?mode=viewprofile&u=1147
Скачать игровые автоматы на Cat Casino — это как открыть сундук с сокровищами у древнего пирата. Кэт Казино дарит вам этот ключ к виртуальной роскоши, который вас унесет в мир ярких красок и звуков, мир, где каждый барабан может стать вашим верным спутником. От бескрайних просторов космоса до забытых храмов древних цивилизаций, каждая игра на Cat Casino — это отдельная история, написанная специально для вас.Добро пожаловать на карнавал азарта и веселья — Cat Casino, где игра становится истинным искусством развлечения! Если вам нужно скачать уникальные игровые автоматы и погрузиться в мир волнения и возможностей, то Кэт Казино готово стать вашим верным спутником в этом захватывающем путешествии.
kharevadura · August 27, 2023 at 9:32 pm
На сайте https://www.vladdiplom.ru/ воспользуйтесь уникальным и высокотехнологичным сервисом, который создан специально для студентов. Если и вы хотите успешно сдать диплом, преуспеть по определенному предмету, то скорей воспользуйтесь этим сервисом, на котором есть все, что нужно. Здесь вы сможете воспользоваться репетиторскими услугами, а также профессиональными консультациями для студентов, аспирантов. Будут оказаны консультации по гуманитарным, математическим, экономическим, техническим наукам, а также программированию.
pyridium united kingdom · August 28, 2023 at 12:31 am
celebrex usa celebrex 100mg otc celebrex usa
HarryPaype · August 28, 2023 at 1:37 am
Покердом бездепозитный бонус
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Виртуозно разыгрывайте свои карты и стратегические ходы, используя свой Покердом бездепозитный бонус 1000. В этой азартной игре каждый ход – как важное решение в шахматной партии, и только вы вольны выбирать, какой путь в азартной стратегии следует выбрать. Даже самый маленький бонус может стать ключом к большим победам, а Покердом бездепозитный бонус 1000 – это ваш персональный билет к успеху!Любите игру в покер? Хотите ощутить вкус победы и азарта, не вкладывая свои сбережения? Тогда Покердом бездепозитный бонус 1000 – это ваш билет в мир азартных возможностей! Смело присоединяйтесь к игре в уникальном онлайн казино Покердом с промокодом на бездепозитный бонус и получите свои первые 1000 единиц азартного капитала!
Georgeexorp · August 28, 2023 at 1:42 am
http://lisinopril.pro/# zestoretic price
fake id template · August 28, 2023 at 4:40 am
I have to thank you for the efforts you have put in writing this website.
I really hope to view the same high-grade content by you later on as
well. In truth, your creative writing abilities has motivated me to get my own, personal site
now 😉
Here is my web page – fake id template
Marleneduh · August 28, 2023 at 1:59 pm
Вавада казино онлайн
http://rem.4nmv.ru/forum/profile.php?action=show&member=1231
Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!
Marleneduh · August 28, 2023 at 2:13 pm
Вавада казино онлайн
https://romanvip.ru/index.php?members/muro-uyat.3471/
Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.
Robertdup · August 28, 2023 at 3:44 pm
Желтый пилинг лица косметическая процедура, направленная на омоложение лица
top4art.com · August 28, 2023 at 5:26 pm
Sweet blog! I found it while searching on Yahoo News.
Do you have any suggestions on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get
there! Thanks
https://zvezdapovolzhya.ru/go/aHR0cHM6Ly9tYXBzLmdvb2dsZS5jei91cmw/cT1odHRwcyUzQSUyRiUyRnRoZWVxdWFsaXplcjNtb3ZpZS5jb20 · August 29, 2023 at 12:59 am
Have you ever considered about adding a little bit more than just your articles?
I mean, what you say is valuable and everything. However think of if you added
some great images or videos to give your posts more, “pop”!
Your content is excellent but with images and clips, this website could undeniably be one of the best
in its niche. Very good blog!
RobertJuh · August 29, 2023 at 5:52 am
онлайн казино на биткоин
https://t.me/s/bitkoin_kazino1
Погрузившись в мир казино биткоин, вы откроете для себя уникальные моменты и неожиданные сюрпризы, подобно археологу, раскрывающему долгожданные артефакты. Онлайн казино на биткоин 2023 предоставляет неограниченные возможности, словно экспедиция в поисках сокровищ, где каждый новый спин – это расшифровка кода, приближающая к заветной награде. И в этом мире биткоин казино, каждый игрок – как детектив, исследующий тайны и проницательно анализирующий ситуацию.Казино биткоин – это не только о играх и азарте, это и возможность погрузиться в увлекательную и динамичную вселенную, где биткоины становятся ключом к захватывающим приключениям. Онлайн казино на биткоин 2023 вдохновляет на исследования и освоение новых горизонтов, словно космический корабль, взлетающий к звездам. В этом мире биткоин казино, каждый игрок – это путешественник, открывающий неизведанные планеты удачи.
bezogoroda.ru · August 29, 2023 at 8:08 am
Hi, just wanted to mention, I liked this post. It was practical. Keep on posting!
VictorSteeP · August 29, 2023 at 5:02 pm
https://wiki.hrw-fablab.de/index.php?title=Roza4U
View website · August 29, 2023 at 5:19 pm
There is an 18/38, or about a 47.four%, likelihood the ball will
land on a red or black quantity.
my blog … View website
bezogoroda.ru · August 29, 2023 at 6:25 pm
Asking questions are really good thing if you are not understanding anything completely, except this article offers pleasant understanding even.
HarryPaype · August 29, 2023 at 6:26 pm
Покердом бездепозитный бонус 1000
Покердом бездепозитный бонус 1000
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Любите игру в покер? Хотите ощутить вкус победы и азарта, не вкладывая свои сбережения? Тогда Покердом бездепозитный бонус 1000 – это ваш билет в мир азартных возможностей! Смело присоединяйтесь к игре в уникальном онлайн казино Покердом с промокодом на бездепозитный бонус и получите свои первые 1000 единиц азартного капитала!
kurocGuams · August 29, 2023 at 6:30 pm
На сайте https://mr-shrus.ru/ вы сможете приобрести автозапчасти на самые разные автомобили, независимо от марки. Для каждого клиента действует быстрый подбор деталей, профессиональные консультации. Здесь оказывают поддержку в диагностике. Несколько тысяч деталей, аксессуаров. При необходимости заказать детали получится через сайт. Позвоните по телефону для того, чтобы узнать всю необходимую информацию. Регулярно в интернет-магазине проходят акции, которые сделают покупку более выгодной. Участвуйте в распродажах.
HarryPaype · August 29, 2023 at 6:34 pm
Покердом бездепозитный бонус
казино биткоин
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Виртуозно разыгрывайте свои карты и стратегические ходы, используя свой Покердом бездепозитный бонус 1000. В этой азартной игре каждый ход – как важное решение в шахматной партии, и только вы вольны выбирать, какой путь в азартной стратегии следует выбрать. Даже самый маленький бонус может стать ключом к большим победам, а Покердом бездепозитный бонус 1000 – это ваш персональный билет к успеху!
online shopping sri Lanka · August 29, 2023 at 6:46 pm
Hey! I realize this is kind of off-topic but I had to
ask. Does operating a well-established website like yours take a massive amount work?
I’m brand new to blogging but I do write in my journal everyday.
I’d like to start a blog so I can easily share my personal experience and thoughts online.
Please let me know if you have any suggestions or tips
for new aspiring bloggers. Thankyou!
VictorSteeP · August 29, 2023 at 7:03 pm
https://wiki.apolloabove.org/index.php/User:AracelisSena7
Anthonyindem · August 29, 2023 at 7:26 pm
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
vksex_Nuh · August 29, 2023 at 7:37 pm
ххх фото – https://vksex.ru/
VictorSteeP · August 29, 2023 at 7:41 pm
https://chadwiki.org/index.php/Roza4U
Robertdup · August 29, 2023 at 8:14 pm
Желтый пилинг лица – популярная косметическая процедура, направленная на омоложение и улучшение состояния эпидермиса. Методика основана на использовании специального химического раствора, содержащего ретиноевую кислоту.
DonnamoIce · August 29, 2023 at 8:17 pm
Вавада казино официальный сайт
http://wmmoney.tforums.org/viewtopic.php?f=79&t=15088&p=37102#p37102
Мы понимаем, что азарт – это страсть, влекущая вас в водоворот волнений и эмоций. Именно поэтому наш виртуальный портал оформлен с максимальным комфортом и удобством. От главной страницы до разделов с игровыми автоматами, Vavada Casino заботится о вашем удовольствии и простоте навигации.Казино Вавада – это не просто игровая площадка, это атмосфера азарта, уникальных возможностей и незабываемых впечатлений. Здесь каждый спин, каждая ставка – это шанс изменить свою судьбу. Войдите в увлекательный мир Вавада Казино и станьте частью этой захватывающей истории выигрышей и успехов!
DonnamoIce · August 29, 2023 at 8:31 pm
Вавада казино онлайн
http://www.detki-v-setke.ru/index.php?showuser=16819
Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.Чтобы начать свой путь к богатству и развлечениям на Vavada Casino, войдите на официальный сайт с легкостью и комфортом. Просто следуйте по интуитивно понятной навигации, и вы окажетесь в виртуальном мире увлекательных возможностей. И помните, что Вавада Казино заботится о своих игроках, предлагая лучшие бонусы и акции, которые подарят вам дополнительные шансы на победу.
HenryLycle · August 29, 2023 at 9:09 pm
Payday loans online
Payday loans online
DonnamoIce · August 29, 2023 at 9:23 pm
Вавада казино онлайн
http://www.starterkit.ru/html/index.php?name=account&op=info&uname=dibepad846
Для ценителей азарта и риска, для тех, кто ищет настоящие адреналиновые ощущения, Казино Вавада подготовило специальные разделы с карточными играми и рулеткой. Здесь каждая ставка – это шанс поймать удачу за хвост и уйти с внушительным выигрышем.Добро пожаловать в захватывающий мир азарта и увлекательных игр на официальном сайте — Казино Вавада! Если вы готовы окунуться в водоворот невероятных эмоций и испытать удачу в самых захватывающих онлайн-слотах, то Вавада Казино — ваш идеальный выбор.
DavidAsteT · August 29, 2023 at 9:30 pm
Outbus
DonnamoIce · August 29, 2023 at 9:37 pm
Vavada casino
https://soblazn-opt.com/people/user/330/blog/#post3485
Мы понимаем, что азарт – это страсть, влекущая вас в водоворот волнений и эмоций. Именно поэтому наш виртуальный портал оформлен с максимальным комфортом и удобством. От главной страницы до разделов с игровыми автоматами, Vavada Casino заботится о вашем удовольствии и простоте навигации.Играя на деньги в слоты-онлайн на официальном сайте Казино Вавада, вы перенесетесь в мир невероятных приключений и неожиданных поворотов. Наши разнообразные игры не оставят равнодушными даже самых искушенных азартных геймеров. Ведь Вавада Казино славится своими уникальными азартными сокровищами, спрятанными среди множества игровых автоматов.
DavidAsteT · August 29, 2023 at 9:40 pm
Payday loans online
HarryPaype · August 29, 2023 at 9:58 pm
Покердом бездепозитный бонус 1000
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.Виртуозно разыгрывайте свои карты и стратегические ходы, используя свой Покердом бездепозитный бонус 1000. В этой азартной игре каждый ход – как важное решение в шахматной партии, и только вы вольны выбирать, какой путь в азартной стратегии следует выбрать. Даже самый маленький бонус может стать ключом к большим победам, а Покердом бездепозитный бонус 1000 – это ваш персональный билет к успеху!
HarryPaype · August 29, 2023 at 10:08 pm
Покердом бездепозитный бонус
казино биткоин
Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.Делайте ставки, обдумывайте тактику и раскрывайте карты своего будущего в игре в покер с казино Покердом. Промокод на бездепозитный бонус – это как магическая фраза, призывающая удачу на вашу сторону. Ведь в мире азартных игр каждый момент – это как нота в мелодии азарта, и только вы сможете прочитать ноты своей победы.
HarryPaype · August 29, 2023 at 10:43 pm
Покердом бездепозитный бонус
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Любите игру в покер? Хотите ощутить вкус победы и азарта, не вкладывая свои сбережения? Тогда Покердом бездепозитный бонус 1000 – это ваш билет в мир азартных возможностей! Смело присоединяйтесь к игре в уникальном онлайн казино Покердом с промокодом на бездепозитный бонус и получите свои первые 1000 единиц азартного капитала!Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!
HarryPaype · August 29, 2023 at 10:50 pm
Казино Покердом промокод
онлайн казино на биткоин
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Покердом бездепозитный бонус 1000 – это как магический ключ к виртуальному казино, который отпирает дверь к миру высоких ставок и больших побед. Начните свой путь в азартной игре с бонуса без депозита и откройте для себя все прелести игры в покер с невероятными возможностями для выигрыша. Да, это не сон, это реальность – Покердом бездепозитный бонус 1000 ждет вас!
https://wiki.sports-5.ch · August 29, 2023 at 10:59 pm
Even if you never make a profit, our encouraged immediate sign up bonus no deposit apps have plenty of excellent games.
Feel free to visit my page; https://wiki.sports-5.ch
Anthonyindem · August 29, 2023 at 11:09 pm
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
Anthonyindem · August 29, 2023 at 11:19 pm
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
Anthonyindem · August 29, 2023 at 11:53 pm
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
Anthonyindem · August 30, 2023 at 12:00 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
choad · August 30, 2023 at 12:17 am
These are actualⅼy wοnderful iԀeas in onn the topic of blogging.
Υou have ouched some good factors here.
Any way keep up wrinting.
Kendra · August 30, 2023 at 12:54 am
You actually explained this exceptionally well.
onstanDuple · August 30, 2023 at 2:18 am
На сайте https://wind-activ.com находятся активаторы для Windows. Перед тем, как принять правильное решение, необходимо ознакомиться с техническими характеристиками, особенностями версии, а также тем, для каких вариантов больше всего подходит. Если находитесь в поисках определенной версии, то воспользуйтесь каталогом, также поможет и меню, где находятся все доступные варианты. Также на сайте имеются и ключики. Слева присутствует лучшее на сайте. Скачать все, что нужно, можно при помощи активной ссылки.
porn · August 30, 2023 at 2:20 am
Howdy! I just want to offer you a big thumbs up for
the great info you have here on this post. I am coming back to your web site for more soon.
HarryPaype · August 30, 2023 at 2:38 am
Покердом бездепозитный бонус
Покердом бездепозитный бонус 1000
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Виртуозно разыгрывайте свои карты и стратегические ходы, используя свой Покердом бездепозитный бонус 1000. В этой азартной игре каждый ход – как важное решение в шахматной партии, и только вы вольны выбирать, какой путь в азартной стратегии следует выбрать. Даже самый маленький бонус может стать ключом к большим победам, а Покердом бездепозитный бонус 1000 – это ваш персональный билет к успеху!
HarryPaype · August 30, 2023 at 2:53 am
Покердом бездепозитный бонус 1000
https://t.me/s/pokerdom_bezdepozitny_bonus_1000
Покердом бездепозитный бонус 1000 – это как магический ключ к виртуальному казино, который отпирает дверь к миру высоких ставок и больших побед. Начните свой путь в азартной игре с бонуса без депозита и откройте для себя все прелести игры в покер с невероятными возможностями для выигрыша. Да, это не сон, это реальность – Покердом бездепозитный бонус 1000 ждет вас!Покердом бездепозитный бонус 1000 – это как ветер перемен, который может повернуть вас в направлении больших выигрышей. Этот бонус – как невидимая рука удачи, которая поможет вам обойти всех соперников на пути к азартному успеху. Покердом бездепозитный бонус – это как феерический фейерверк азартных возможностей, освещающий ваш путь к победе.
tampering · August 30, 2023 at 3:32 am
Have you ever thought about adding a little bit more than just your articles?
I mean, what you say is fundamental and all.
Nevertheless think of if you added some great graphics or videos to give your posts more,
“pop”! Your content is excellent but with images and videos, this site could
certainly be one of the very best in its field.
Good blog!
Anthonyindem · August 30, 2023 at 3:48 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
HarryPaype · August 30, 2023 at 3:49 am
Казино Покердом промокод
казино биткоин
Покердом бездепозитный бонус 1000 – это как магический ключ к виртуальному казино, который отпирает дверь к миру высоких ставок и больших побед. Начните свой путь в азартной игре с бонуса без депозита и откройте для себя все прелести игры в покер с невероятными возможностями для выигрыша. Да, это не сон, это реальность – Покердом бездепозитный бонус 1000 ждет вас!Любите игру в покер? Хотите ощутить вкус победы и азарта, не вкладывая свои сбережения? Тогда Покердом бездепозитный бонус 1000 – это ваш билет в мир азартных возможностей! Смело присоединяйтесь к игре в уникальном онлайн казино Покердом с промокодом на бездепозитный бонус и получите свои первые 1000 единиц азартного капитала!
Luzwun · August 30, 2023 at 4:00 am
buy dydrogesterone 10 mg without prescription cost sitagliptin 100mg jardiance over the counter
ZacharyCog · August 30, 2023 at 4:03 am
canadian pharmacy prices [url=http://certifiedcanadapills.pro/#]trusted canadian pharmacy[/url] canadapharmacyonline legit
Anthonyindem · August 30, 2023 at 4:03 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
HarryPaype · August 30, 2023 at 4:04 am
Покердом бездепозитный бонус 1000
онлайн казино на биткоин
Не упустите шанс почувствовать вкус азартной победы с Покердом бездепозитный бонус 1000! Ведь каждый бонусный доллар – это как капля адреналина, добавленная в вашу игру. Сделайте свои ставки, проявите свою азартную интуицию и начните свой азартный путь с бонуса без депозита. Казино Покердом дарит вам этот шанс – вам остается только взять его в свои руки и начать свой путь к азартному успеху!Покердом бездепозитный бонус 1000 – это как магический ключ к виртуальному казино, который отпирает дверь к миру высоких ставок и больших побед. Начните свой путь в азартной игре с бонуса без депозита и откройте для себя все прелести игры в покер с невероятными возможностями для выигрыша. Да, это не сон, это реальность – Покердом бездепозитный бонус 1000 ждет вас!
EdwardPienT · August 30, 2023 at 4:04 am
is canadian pharmacy legit https://certifiedcanadapills.pro/# online canadian pharmacy reviews
Ayuda de paint en windows · August 30, 2023 at 4:31 am
You actually make it seem so easy with your presentation but I find this matter to be
really something which I think I would never understand.
It seems too complicated and extremely broad for me. I’m looking forward for your next post, I’ll
try to get the hang of it!
Robertdup · August 30, 2023 at 4:32 am
Вакуумная чистка лица процедура, позволяющая достичь идеального состояния лица.
MelisaSiz · August 30, 2023 at 4:56 am
ggpokerok
http://realtai.ru/forum/memberlist.php?mode=viewprofile&u=116542
Искать идеальное место для тонкой стратегии и дерзких решений? Добро пожаловать в мир азарта и интриги на официальном портале игры в покер – Покерок! Здесь, на звучном и запоминающемся PokerOK, ваша жажда азарта обретет настоящий дом. Не только игра, но и настоящие ощущения живого взаимодействия – вот что делает Покерок уникальным игровым пространством.PokerOK — не просто сайт, это целая вселенная покера. Виртуальные столы, где встречаются игроки со всех уголков мира, станут вашей ареной славы. Почувствуйте дух соперничества, где ваш интеллект и аналитические способности будут подвергнуты самому жаркому испытанию. Играйте на реальные ставки, ведь именно здесь рождаются настоящие победители.
Anthonyindem · August 30, 2023 at 4:58 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx casino! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
MelisaSiz · August 30, 2023 at 5:11 am
гг покерок
http://poznanie.com.ua/forum/user/566945/
Покерок – это не просто игра, это арена, где сходятся страсть, ловкость и смелость. Каждая раздача как новая страница в книге, где вы – главный герой, а карты – ваши верные спутники. Скачайте клиент PokerOK и вступите в игру, где решение каждого хода – это шанс повернуть сюжет в свою пользу.PokerOK – это платформа, которая говорит “да” вашим амбициям и страсти к победе. Скачайте клиент PokerOK и войдите в уникальный мир tурниров, акций и бесконечных возможностей. Это ваш шанс стать частью элитного покерного сообщества, где каждая игра – шаг к завоеванию вершины.
Anthonyindem · August 30, 2023 at 5:13 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — официальный сайт brillx казино! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Brillx casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Brillx casino. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Brillx casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Brillx casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Brillx casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Brillx casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Brillx casino — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
Jasoncrins · August 30, 2023 at 5:47 am
buy viagra pharmacy
MelisaSiz · August 30, 2023 at 6:07 am
покерок
http://forum.webmvc.com/index.php?/profile/21616-gefeua/
Чтобы присоединиться к увлекательному миру PokerOK, просто перейдите на официальный сайт, где вас ждет возможность скачать клиент для игры в покер. С ним вы окунетесь в виртуальное путешествие по захватывающему миру карт и фишек, где каждый ваш ход анализируется и обдумывается до мельчайших деталей.Не упустите возможность окунуться в захватывающий мир покера на официальном сайте PokerOK. Скачайте клиент и начните свой путь к славе и богатству, где каждая партия – это шанс стать настоящим мастером покера. Ваша удача ждет вас за столом, где PokerOK – это не просто имя, это стиль жизни, где рождаются настоящие победители.
MelisaSiz · August 30, 2023 at 6:22 am
pokerok официальный сайт
http://www.senbernar.ru/profile/4742-axyygk/
Чтобы присоединиться к увлекательному миру PokerOK, просто перейдите на официальный сайт, где вас ждет возможность скачать клиент для игры в покер. С ним вы окунетесь в виртуальное путешествие по захватывающему миру карт и фишек, где каждый ваш ход анализируется и обдумывается до мельчайших деталей.Покер – это не только игра карт и вероятностей, это настоящее искусство управления рисками и анализа оппонентов. Если вы ищете идеальное место для своего покерного мастерства, вашим лучшим выбором будет официальный сайт PokerOK. В мире онлайн-гемблинга этот ресурс — настоящая находка для истинных ценителей азартных развлечений.
zaymy_crelt · August 30, 2023 at 6:24 am
https://займы-все.рф/
http://ww1.theequalizer3movie.com · August 30, 2023 at 6:25 am
Appreciate the recommendation. Will try it out.
bs.mba · August 30, 2023 at 7:28 am
Do you mind if I quote a couple of your posts as long as I provide credit
and sources back to your webpage? My blog is in the exact same niche
as yours and my visitors would certainly benefit from some of the information you provide
here. Please let me know if this ok with you. Thank you!
glucofort reviews · August 30, 2023 at 8:01 am
An interesting discussion is definitely worth comment.
I do believe that you ought to write more on this subject matter, it
may not be a taboo matter but typically people don’t talk about these subjects.
To the next! Kind regards!!
Wendellbar · August 30, 2023 at 8:04 am
Stumbled upon a captivating article – definitely take a look! https://glonet.com/blog/3405/get-inspired-and-informed-with-these-intriguing-videos-to-watch-today/
Lloydgep · August 30, 2023 at 8:14 am
http://indiapharmacy.cheap/# reputable indian pharmacies
nakrytka_jef · August 30, 2023 at 8:26 am
https://nakrytka.com
Georgelaupe · August 30, 2023 at 9:13 am
canadian pharmacy india: buy medicines online in india – indianpharmacy com
Della · August 30, 2023 at 9:26 am
I like reading a post that can make men and women think.
Also, many thanks for permitting me to comment!
Feel free to surf to my page :: 바이낸스 추천코드 (Della)
overhyped · August 30, 2023 at 9:57 am
you’re in reality a good webmaster. The site loading velocity is
incredible. It seems that you’re doing any distinctive trick.
Also, The contents are masterpiece. you have done a
excellent task on this matter!
Ellisbuh · August 30, 2023 at 10:25 am
https://www.obzorx.ru/2023/08/ame-capitals-na-sayte-amecapitals.com-chto-dumayut-polzovateli.html
카지노친구 · August 30, 2023 at 10:37 am
Take this advice as you will, but stay away from tis totally
fixed casino.
Also visit my web blog :: 카지노친구
สล็อตเว็บตรง · August 30, 2023 at 11:24 am
I’m gone to convey my little brother, that he should also visit this weblog on regular basis to
get updated from most up-to-date gossip.
Also visit my site – สล็อตเว็บตรง
zuyevpef · August 30, 2023 at 11:48 am
На сайте https://soccerforma.com/ приобретите взрослую или детскую форму лучших футбольных игроков. Регулярно на сайте появляются новинки, с которыми будет интересно ознакомиться и вам. Если вы являетесь футбольным болельщиком, то этот магазин точно вызовет неподдельный интерес. Здесь действуют оптимальные расценки, а потому совершить приобретение сможет каждый желающий. На портале представлена еще и вся необходимая атрибутика. А распродажа позволит совершить приятную покупку с огромной экономией.
website · August 30, 2023 at 1:09 pm
gives the most effective on the internet casino gambling
experience.
Here is my blog post; website
erepaOvara · August 30, 2023 at 1:17 pm
На сайте https://top-setka.ru/catalog/armatura/ вы сможете ознакомиться с большим каталогом арматуры. Продажа арматуры в Москве по выгодным ценам. Купить и узнать цены на арматуры можно на сайте. Арматура всегда в наличии: арматура для строительства, железобетонная арматура, арматура для фундамента, гибкая арматура.
Carrienoisp · August 30, 2023 at 1:39 pm
catcasino
https://ns1.optic-lite.ru/forum/viewtopic.php?f=7&t=26092
Cat Casino — это не просто сайт для игры в азартные игры, это истинное шоу, где каждый спин на игровых автоматах может стать настоящим произведением искусства. В 2023 году мы снова удивляем своих гостей неординарной графикой и инновационными механиками игры. Это не просто казино, это виртуальная страна удовольствий, где каждый вращение барабана — это билет в мир фантазий и желаний.Коротко говоря, Cat Casino — это не просто игровая площадка, это мир возможностей и развлечений. Скачайте приложение Cat Casino и окунитесь в атмосферу удовольствия, где каждый спин может изменить вашу судьбу. Не упустите свой шанс на великолепный куш и захватывающие приключения на Cat Casino, где сливаются азарт и элегантность.
Carrienoisp · August 30, 2023 at 1:54 pm
cat casino вход
http://www.cartton.ru/forum/index.php?PAGE_NAME=profile_view&UID=24395
Добро пожаловать на карнавал азарта и веселья — Cat Casino, где игра становится истинным искусством развлечения! Если вам нужно скачать уникальные игровые автоматы и погрузиться в мир волнения и возможностей, то Кэт Казино готово стать вашим верным спутником в этом захватывающем путешествии.Когда вы играете в Cat Casino, вы не просто спинаете барабаны, вы погружаетесь в атмосферу настоящего азарта. Здесь каждый вращение приносит ощущение настоящей жизни, где каждый риск — это шанс на большой выигрыш. С Cat Casino каждый может стать героем своего собственного казино-романа, где главные герои — это вы и ваши азартные мечты.
Robertdup · August 30, 2023 at 2:14 pm
Вакуумная чистка лица – метод, позволяющий достичь идеального состояния лица без неприятных ощущений, повреждений, осложнений для здоровья и красоты лица.
Carrienoisp · August 30, 2023 at 2:49 pm
cat casino промокод
http://www.passat-cc.ru/forum/viewtopic.php?f=16&t=16773&p=368725#p368725
Ощути магию азарта в каждом вращении барабана. Cat Casino – это не просто место, где можно играть в игровые автоматы, это мир, который оживает с каждым кликом. Каждый слот – это история, которая разворачивается перед твоими глазами, и ты можешь стать ее главным героем.Добро пожаловать в удивительный мир азартных развлечений — Cat Casino, парадоксальное слияние элегантности и азарта. В этом 2023 году, Cat Casino стал бесспорным героем азартной индустрии, обещая незабываемые впечатления и бесконечное веселье. На Cat Casino, Кэт Казино вас ждет множество возможностей, будь вы опытный азартный игрок или новичок, только начинающий свой путь в мире карточных столов и игровых автоматов.
Carrienoisp · August 30, 2023 at 3:04 pm
казино cat бездепозитный бонус код
http://www.gaz69.ru/ipb/profile/39498-rekekal419/?tab=field_core_pfield_13
Играя в Cat Casino, Кэт Казино, вы попадаете в атмосферу совершенно новых ощущений. Это не просто казино, это путешествие в мир невероятных приключений. Игровые автоматы на Cat Casino созданы с огромной любовью к деталям, где каждая вращающаяся барабана — как страница в увлекательной книге. Вас ждут великолепные графика, уникальные звуковые эффекты и увлекательные сюжеты.Cat Casino — это не просто казино, это путь к невероятным приключениям и неожиданным сюрпризам. Скачайте наше приложение или играйте онлайн — выбор за вами. Но одно остается неизменным: Cat Casino всегда готово порадовать вас своими уникальными играми, яркой графикой и захватывающим азартом. Встречайте 2023 год вместе с Cat Casino и станьте частью легенды азартного мира!
Jasonprorp · August 30, 2023 at 4:26 pm
Промокоды и бездепозитные бонусы в онлайн-казино
https://t.me/bezdepozit_bonusy
RodneyDor · August 30, 2023 at 6:30 pm
брилкс казино
https://brillx-kazino.com
Играя в Brillx Казино, вы окунетесь в мир невероятных возможностей. Наши игровые автоматы не только приносят удовольствие, но и дарят шанс выиграть крупные денежные призы. Ведь настоящий азарт – это когда каждое вращение может изменить вашу жизнь!Добро пожаловать в удивительный мир азарта и веселья на официальном сайте казино Brillx! Год 2023 принес нам новые горизонты в мире азартных развлечений, и Brillx на переднем крае этой революции. Если вы ищете непередаваемые ощущения и возможность сорвать джекпот, то вы пришли по адресу.
ZacharyCog · August 30, 2023 at 8:21 pm
canadian pharmacy world reviews [url=https://certifiedcanadapills.pro/#]canadian pharmacy victoza[/url] online canadian pharmacy
Wesleykep · August 30, 2023 at 8:25 pm
[url=https://ma.by/away.php?url=https://vk.cc/cqucV6]omg зеркало
Jasonprorp · August 30, 2023 at 9:03 pm
Промокоды и бездепозитные бонусы в онлайн-казино
https://t.me/kazino_promokody
MrGrantgx9wl · August 30, 2023 at 9:59 pm
[url=http://youtube.com/@MrGrant-gx9wl]youtube.com/@MrGrant-gx9wl[/url]
Confira Nossa Secao Unpropitious do Orientation com Pecas por Ate 60% de Desconto. Garanta seus Favoritos.
youtube.com/@MrGrant-gx9wl
MelisaSiz · August 30, 2023 at 10:13 pm
ggpokerok официальный
https://spw.ru/forum/members/vladi.8214/
Так что, если вы готовы к вызову и хотите окунуться в захватывающий мир покера, PokerOK — ваш надежный спутник в этом приключении. Скачайте клиент, присоединяйтесь к столам и докажите, что именно ваша рука достойна звания королевской!На PokerOK вы найдете бесчисленное количество уникальных возможностей. Команда профессионалов работает над тем, чтобы каждый игрок ощущал заботу и внимание. Будьте уверены, что ваша безопасность и конфиденциальность – наш приоритет. Откройте для себя мир разнообразных турниров и регулярных игр, где даже невероятные шансы могут привести к захватывающему успеху.
DwayneStuff · August 30, 2023 at 10:22 pm
reputable indian pharmacies: india online pharmacy – india online pharmacy
MelisaSiz · August 30, 2023 at 10:28 pm
покерок
https://bjdclub.com/memberlist.php?mode=viewprofile&u=164486
Ищете захватывающий мир азартных испытаний и уникальных стратегий? Присоединяйтесь к нам на PokerOK — истинном раем для покерных энтузиастов, где страсть к игре переплетается с передовыми технологиями. Откройте дверь в увлекательное покерное путешествие прямо сейчас.PokerOK — не просто сайт, это целая вселенная покера. Виртуальные столы, где встречаются игроки со всех уголков мира, станут вашей ареной славы. Почувствуйте дух соперничества, где ваш интеллект и аналитические способности будут подвергнуты самому жаркому испытанию. Играйте на реальные ставки, ведь именно здесь рождаются настоящие победители.
MelisaSiz · August 30, 2023 at 11:23 pm
pokerok официальный сайт
https://biomolecula.ru/authors/23008
Казино PokerOK — это не только азарт, но и безопасность. Современные технологии шифрования данных и надежные методы денежных операций позволяют вам сосредоточиться на игре, не беспокоясь о своей конфиденциальности или средствах на счету. PokerOK заботится о своих игроках, создавая неповторимую атмосферу доверия и уважения.На PokerOK вы найдете бесчисленное количество уникальных возможностей. Команда профессионалов работает над тем, чтобы каждый игрок ощущал заботу и внимание. Будьте уверены, что ваша безопасность и конфиденциальность – наш приоритет. Откройте для себя мир разнообразных турниров и регулярных игр, где даже невероятные шансы могут привести к захватывающему успеху.
Carlaneolo · August 31, 2023 at 8:16 am
gama casino
https://itw.fludilka.su/viewtopic.php?id=1539
Играя в Гама Казино, вы обнаружите, что это не просто место для испытания удачи. Это космос, где каждый спин на игровых автоматах — это возможность покорить вершину джекпота. Каждая мелодия, каждая крупье, словно созданы, чтобы погрузить вас в атмосферу истинного казино.Приветствуем вас в удивительной вселенной азартных развлечений — Gama Casino, где каждый клик приоткроет завесу тайны захватывающего мира азарта и возможностей. Ищете путь к входу на официальный сайт, чтобы окунуться в водоворот азартных эмоций? Гама Казино — ваш проводник в этот потрясающий мир!
Chassidy · August 31, 2023 at 9:58 am
Может быть тут все верно, одhttps://general-machines.ua/ru/cena-novogo-frontalnogo-pogruzchika/ко {завтра} я заполучу консультацию и отпишусь!
池袋 占い · August 31, 2023 at 8:35 pm
If some one needs expert view on the topic of blogging and site-building after
that i recommend him/her to pay a quick visit this webpage, Keep up the fastidious work.
PhilipTounc · August 31, 2023 at 11:01 pm
https://tetrabookmarks.com/story15427566/reduslim-kaufen
Carrienoisp · August 31, 2023 at 11:57 pm
cat casino бездепозитный бонус
https://forum.esetnod32.ru/user/74626/
Как скачать Cat Casino и начать веселье на полную катушку? Процесс установки наше приложение на ваше устройство быстр и прост. За считанные минуты вы будете готовы к захватывающим приключениям наших игровых автоматов. А для тех, кто не хочет загружать ничего дополнительно, предлагаем вариант игры онлайн, прямо на нашем сайте. С Cat Casino играть в любимые азартные игры становится ещё удобнее.Что делает Cat Casino столь особенным? Это не просто портал, это врата в мир максимальных возможностей и волнения. Широкий ассортимент игровых автоматов, представленных на официальном сайте Cat Casino, подарит тебе уникальные эмоции от игры. Играй онлайн, скачивай слоты – выбор за тобой!
Robertjem · September 1, 2023 at 3:55 am
Добро пожаловать на захватывающий виртуальный парадокс развлечений — cat casino официальный сайт! Если вы ищете истинный оазис азарта и удовольствия, то этот игровой магнат стоит на вершине вашего списка. Cat casino — это не просто казино, это своего рода архитектурное чудо в мире виртуальных игорных заведений.
Ощутите дыхание азарта на своей коже, когда вы прокручиваете барабаны игровых автоматов Кэт казино. Это как будто встреча с великаном удачи, который приглашает вас на праздник выигрышей и возможностей. С каждой ставкой, словно аккордами великого симфонического произведения, вы будете раскрывать новые грани вашего везения.
Cat casino — это путь к успеху и волнению, усыпанный яркими бриллиантами азартных игр. Неважно, являетесь ли вы сторонником классических слотов или предпочитаете бросить вызов современным видео-играм, этот портал соткан из разнообразия и эксклюзивности. Виртуозная графика и захватывающие сюжеты приведут вас в виртуальные миры, где реальность и фантазия переплетаются в невероятной гармонии.
Играя в Cat casino, вы становитесь участником легендарного турнира удачи. Ваши ставки — это виртуозные ноты в симфонии азарта, а барабаны игровых автоматов — это как будто панели настоящего игрового пианино. С каждым вращением вы создаете мелодию своей победы, оставляя след в истории этой увлекательной саги.
Cat casino — это бескрайний космос игровых возможностей. Здесь вы можете стать магом карт или виртуальным ковбоем рулетки. Это место, где даже самые неожиданные комбинации приносят грандиозные выигрыши. Откройте для себя игровой университет, где каждая ставка — это урок в искусстве азарта, а каждый джекпот — это диплом мастера удачи.
Зайдите на официальный сайт Cat casino и откройте двери в мир, где действительность становится мифом, а миф — реальностью. Кэт казино — это путеводная звезда во мраке игровых просторов. Вам уже готовится красный ковер из карточных мастей и блеска монет. Отправьтесь в незабываемое приключение азарта и наслаждения прямо сейчас!
CesarLof · September 1, 2023 at 3:58 am
Discovered an article that might catch your interest ? don’t miss it! https://americanwomenorg.com/read-blog/29160
PhilipTounc · September 1, 2023 at 4:22 am
https://totalbookmarking.com/story15409045/reduslim-apotheke
blogovk_viess · September 1, 2023 at 7:00 am
https://blogovk.com/
Ulyssesdrurl · September 1, 2023 at 7:27 am
Came across an interesting article, worth a glance http://forum.hi-def.ru/index.php?showtopic=13330
fasterskier.com · September 1, 2023 at 8:52 am
I’m impressed, I have to admit. Seldom do I
come across a blog that’s both equally educative and interesting, and let me tell you,
you have hit the nail on the head. The problem is something not enough men and women are speaking intelligently about.
I’m very happy that I stumbled across this during my
search for something relating to this.
Suzanna · September 1, 2023 at 8:53 am
Nicely put. Thanks.
مای میکاپ استوری · September 1, 2023 at 10:55 am
Hi just wanted to give you a quick heads up and let you know a few of the images
aren’t loading properly. I’m not sure why but I think its
a linking issue. I’ve tried it in two different browsers
and both show the same results.
shcheSpucK · September 1, 2023 at 10:56 am
На сайте https://krasnodarregistr.ru вы сможете узнать номер телефона для того, чтобы записаться на такую услугу, как временная регистрация в Краснодаре. Важным моментом является то, что оформление происходит строго по закону. У компании безупречная репутация, а потому она точно вам поможет даже в случае, если регистрация вам необходима в ближайшее время. Услуги оказываются по доступной стоимости. Менеджеры в обязательном порядке проведут профессиональную консультацию. По ссылке вы также узнаете всю важную и ценную информацию, касающуюся преимуществ временной регистрации.
JamieVof · September 1, 2023 at 11:06 am
покердом официальный сайт вход
https://t.me/s/pokerdom45official_site
покердом официальный сайт вход
Georgezon · September 1, 2023 at 11:11 am
kamagra: Kamagra tablets – Kamagra Oral Jelly buy online
bogdaMox · September 1, 2023 at 11:23 am
На сайте https://m-strop.by/ вы сможете приобрести стропы текстильные, грузовые напрямую от производителя. Вся продукция создается на производственных мощностях, что исключает брак, появление некачественного товара. При этом вы можете заказать стропы в любом количестве. Заказ будет исполнен в минимальные сроки, качественно и в соответствии с нормативами, строго по ГОСТу. Изделия создаются из надежных, высокотехнологичных материалов. Вся необходимая продукция хранится на складе, что позволяет произвести немедленную отгрузку.
EverettHitty · September 1, 2023 at 12:03 pm
best over the counter ed pills: erection pills online – new treatments for ed
ClintonLougs · September 1, 2023 at 1:14 pm
Found captivating reading that I’d like to offer you – you won’t regret it http://gazeta.ekafe.ru/viewtopic.php?f=48&t=24549
surkoMes · September 1, 2023 at 1:31 pm
На сайте https://101key.ru/ вы сможете заказать качественные запчасти для ноутбуков, а также блоки питания, функциональные аккумуляторы, автомобильные зарядные устройства. Регулярно в интернет-магазине появляются новые позиции от популярных и надежных марок. Они прослужат долгое время, а потому не потребуется замена. Вся продукция реализуется по доступной стоимости и с оперативной доставкой. Для того чтобы убедиться в том, что в магазине только сертифицированный товар, ознакомьтесь с отзывами.
القيود · September 1, 2023 at 2:37 pm
naturally like your web site but you have to test the spelling on several of your
posts. A number of them are rife with spelling problems and
I find it very bothersome to tell the reality then again I’ll surely come back again.
Stefangow · September 1, 2023 at 3:05 pm
Работа в Новокузнецке
1xbet домен на сегодня · September 1, 2023 at 5:32 pm
1xbet домен на сегодня
tableconcept.com · September 1, 2023 at 6:04 pm
There are a lot of possibilities to appreciate
betting utilizing PayPal in Spain.
My web site tableconcept.com
Learn more · September 1, 2023 at 6:24 pm
My Top rated Sportsbooks reviews and recommends sportsbooks independently.
Take a look at my site – Learn more
zorinclolo · September 1, 2023 at 6:57 pm
По ссылке https://play.google.com/store/apps/details?id=com.f0otb4ll.fl0w вы сможете сыграть в GGBet казино. Вас ожидают удивительные игровые слоты, интригующие игры в различных форматах, включая ретро эмуляторы, развлечения с раундами, где выдаются бонусы, также есть и риск-игры. Россияне уже давно по достоинству оценили все преимущества площадки, которая старается для своих клиентов и предлагает лучшие условия. К важным преимуществам проекта относят огромный ассортимент игр, щедрую бонусную программу.
химчистка мебели борисов · September 1, 2023 at 7:00 pm
This piece of writing will help the internet people for building up new blog or even a blog from start to end.
DonnamoIce · September 1, 2023 at 7:36 pm
Vavada casino играть
https://forum.navitel.ru/index.php?/profile/1854191-oozfam/
Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.Когда вы откроете для себя Казино Вавада, вы поймете, что это не просто игровой портал. Это мир, где реальность переплетается с виртуальностью, а Вавада становится проводником в мир увлекательных приключений и невероятных сюрпризов. Не пропустите шанс окунуться в водоворот страстей и азарта на страницах Vavada Casino. Войдите и дайте себе возможность стать частью этой захватывающей истории.
DonnamoIce · September 1, 2023 at 7:53 pm
Vavada casino
https://www.cossa.ru/profile/?ID=205707
Для ценителей азарта и риска, для тех, кто ищет настоящие адреналиновые ощущения, Казино Вавада подготовило специальные разделы с карточными играми и рулеткой. Здесь каждая ставка – это шанс поймать удачу за хвост и уйти с внушительным выигрышем.Добро пожаловать в мир азарта и увлекательных приключений – на официальный портал Казино Вавада! Здесь, на грани воображения и реальности, Вас ждут невероятные возможности для крупных выигрышей. Войдите в захватывающий виртуальный мир развлечений и азартных игр на деньги, доступный на нашем сайте в любое удобное для Вас время.
genadnem · September 1, 2023 at 8:10 pm
Зайдя на сайт https://okolesah.ru/ вы узнаете все или почти все об автомобилях. Большая коллекция статей, которые постоянно добавляются подробно раскрывают многие аспекты о машинах и их ремонте. Вы сможете выбрать интересующий вас раздел, например статьи о рулевом управлении, о тормозной системе, о двигателе, все что касается трансмиссии и многое другое.
CharlesCoown · September 1, 2023 at 8:12 pm
Реальные деньги ПОКЕРДОМ
Реальные деньги ПОКЕРДОМ
Реальные деньги ПОКЕРДОМ
2003 grand am · September 1, 2023 at 8:18 pm
Howdy very nice web site!! Guy .. Excellent .. Superb ..
I’ll bookmark your website and take the feeds also?
I am glad to search out so many helpful information right here within the post, we’d like develop more strategies on this regard, thank you for sharing.
. . . . .
Also visit my web site … 2003 grand am
CharlesCoown · September 1, 2023 at 8:22 pm
Реальные деньги ПОКЕРДОМ
https://t.me/s/igrat_na_dengi_pokerdom
Реальные деньги ПОКЕРДОМ
DonnamoIce · September 1, 2023 at 8:52 pm
Vavada casino играть
http://www.starfile.ru/forum/member.php?u=184487
Полная версия игровых автоматов, предоставленная Казино Вавада, бесплатно открывает перед вами мир бескрайних возможностей. Играйте, ставьте, наслаждайтесь каждым вращением барабанов, ведь именно здесь сбываются мечты. Вавада Казино — это не просто онлайн-казино, это уникальная платформа, где каждый игрок может почувствовать себя настоящим победителем.Добро пожаловать в удивительный мир азарта и больших выигрышей — Казино Вавада! Этот завораживающий игровой портал являет собой настоящий рай для любителей азартных развлечений. Если вы ищете официальный сайт, который предоставит вам возможность войти и окунуться в захватывающий мир азартных игр, то Вавада Казино станет вашим надежным спутником.
DonnamoIce · September 1, 2023 at 9:08 pm
Vavada casino официальный сайт
http://reno.kiev.ua/t31881/
Vavada Casino — это не только игры, но и атмосфера настоящего казино, перенесенная в онлайн пространство. Вас ждут уникальные слоты-онлайн с захватывающей графикой и реалистичными звуками, словно вы находитесь в центре азартного мира.Здесь вы найдете не только знакомые слоты, но и те, которые поразят своей уникальностью. Наша команда тщательно отбирает самые захватывающие и новаторские игры, чтобы каждый спин был настоящим открытием. Вавада Казино предлагает богатство вариантов – от классических фруктовых машин до современных слотов с захватывающими сюжетами.
evseeTem · September 1, 2023 at 10:27 pm
На сайте https://ooo.kreditvesta.ru/ вы сможете получить помощь в предоставлении кредита. Это оптимальный вариант для ИП, а также ООО. При этом не требуется предоплата. Работа происходит по всей России. Для того чтобы воспользоваться услугой, необходимо лишь просто оставить заявку на сайте. Но также вы можете просто позвонить по телефону для оперативной связи. И самое важное, что вам не нужно будет предоставлять подтверждения целей кредитования. Все процедуры выполняются в режиме онлайн.
Russelloffef · September 2, 2023 at 12:51 am
покердом официальный
https://t.me/s/pokerdom_officialniy
покердом официальный
EverettHitty · September 2, 2023 at 2:39 am
cialis canadian pharmacy: generic cialis – cialis pills for sale
uleshoTrinc · September 2, 2023 at 2:44 am
По ссылке https://play.google.com/store/apps/details?id=com.sports.catchtheb011s начинайте играть в популярное казино VAVADA. Этот портал является лицензированным, а потому ведет свою деятельность честно, открыто, регулярно выплачивает полагающиеся средства, ценит своих клиентов, а потому выплаты не задерживает. На регистрацию уходит не более пары минут, после чего вы сможете приступить к игре. На сайте 2000 автоматов, а также игры, которые проводят живые дилеры. Вам доступна особая программа лояльности.
websmm_Nuh · September 2, 2023 at 3:07 am
https://websmm.biz/
ceftriaxone price philippines mercury drug · September 2, 2023 at 3:14 am
Hello very cool blog!! Man .. Beautiful .. Amazing ..
I’ll bookmark your site and take the feeds also?
I’m glad to search out numerous useful information here in the put up, we
want develop more techniques on this regard, thank you
for sharing. . . . . .
grekoEvort · September 2, 2023 at 4:41 am
Рекламно производственная компания Print-Ural https://print-ural.ru/ в Екатеринбурге это широкий спектр услуг как для компаний, так и для частных лиц. Интерьерная печать, плоттерная резка пленки, разработка фирменного стиля, лазерная резка фанеры, брендирование автомобилей, 3д печать, гравировка, ламинирование и многое другое. Вы сможете получить только качественные услуги по приятным ценам.
RandyNew · September 2, 2023 at 5:16 am
Сайт ПокерДом
Сайт ПокерДом
Сайт ПокерДом
MelisaSiz · September 2, 2023 at 6:14 am
ggpokerok скачать на андроид
http://www.microstock.ru/forum/member.php?u=205973
Покерок – это не просто покер, это вихрь эмоций и калейдоскоп стратегий. Ощутите адреналин, покорив вершины мастерства вместе с нами. Наш клиент PokerOK — это воплощение инноваций в мире онлайн-гейминга. Здесь каждая карта имеет значение, а каждый ход — это тщательно обдуманный шаг к победе. Скачайте наш клиент прямо сейчас, чтобы окунуться в атмосферу непредсказуемых розыгрышей.На PokerOK вы найдете бесчисленное количество уникальных возможностей. Команда профессионалов работает над тем, чтобы каждый игрок ощущал заботу и внимание. Будьте уверены, что ваша безопасность и конфиденциальность – наш приоритет. Откройте для себя мир разнообразных турниров и регулярных игр, где даже невероятные шансы могут привести к захватывающему успеху.
lotarebeM · September 2, 2023 at 7:59 am
На сайте https://sovsnab16.ru вы сможете оставить заявку на покупку того оборудования, которое вам приглянулось. Популярная и надежная компания готова выполнить специально для вас разработку инженерной техники непосредственно с нуля. Будут разработаны принципиальные схемы, специалисты выполнят поставку оборудования в срок. Будет выполнен подбор оборудования в соответствии с предпочтениями, требованиями. Доставка организуется по всей России. Компания ООО «Современное снабжение» занимается поставкой именно отечественной техники.
WilliamGok · September 2, 2023 at 8:59 am
Came across an interesting article, worth a glance https://www.vidagrafia.com/read-blog/105883
Robertram · September 2, 2023 at 9:31 am
Регистрация ПокерДом
Регистрация ПокерДом
Регистрация ПокерДом
orbunreads · September 2, 2023 at 11:52 am
На сайте https://pfccskanews.com/ ознакомьтесь с новостями ПФК ЦСКА. Этот сайт создан специально для болельщиков, чтобы они узнали всю необходимую информацию. Только здесь самые актуальные, свежие данные о клубе. На сайте вас ожидают прямые трансляции. Кроме того, имеется информация о том, когда планируются ближайшие матчи ПФК ЦСКА. Есть раздел, в котором находится список матчей ПФК СЦКА. Имеются различные содержательные видеоматериалы, которые помогут лучше понять обстановку. Также опубликована и турнирная таблица на этот и следующий год.
автомагистраль · September 2, 2023 at 12:26 pm
[url=https://znak-avtomagistral.ru/]Дорожный знак Автомагистраль[/url]
Ярлык хайвэй – фиксируемый сверху автомагистралях равным образом автострадах чтобы информирования шоферов о начале равным образом финише данной дороги.
Дорожный знак Автомагистраль
Dennistoits · September 2, 2023 at 2:47 pm
Зеркало ПОКЕРДОМ
Зеркало ПОКЕРДОМ
Зеркало ПОКЕРДОМ
Dennistoits · September 2, 2023 at 2:54 pm
Зеркало ПОКЕРДОМ
Зеркало ПОКЕРДОМ
Зеркало ПОКЕРДОМ
Carrienoisp · September 2, 2023 at 3:02 pm
cat casino официальный войти
http://realtai.ru/forum/memberlist.php?mode=viewprofile&u=112868
Cat Casino — это не просто казино, это путь к невероятным приключениям и неожиданным сюрпризам. Скачайте наше приложение или играйте онлайн — выбор за вами. Но одно остается неизменным: Cat Casino всегда готово порадовать вас своими уникальными играми, яркой графикой и захватывающим азартом. Встречайте 2023 год вместе с Cat Casino и станьте частью легенды азартного мира!Cat Casino заботится о вашей безопасности так же, как Кэт Казино заботится о своих маленьких мурлыках. Ваши данные и финансовые операции находятся под надежной защитой, благодаря нашей передовой технологии шифрования. Так что вы можете сосредоточиться только на одном — наслаждаться игрой и стремиться к победам.
Prestonphype · September 2, 2023 at 4:00 pm
https://moyoauto.ru/stati/chto-posmotret-na-sahaline.html
EverettHitty · September 2, 2023 at 5:13 pm
ed pills gnc: best over the counter ed pills – best ed treatment
Johnnymob · September 2, 2023 at 6:29 pm
POKERDOM CASINO
https://t.me/s/pokerdom_vhod
POKERDOM CASINO
FabianRal · September 2, 2023 at 11:45 pm
вход на Покердом
https://t.me/s/bigwins_here
вход на Покердом
matveGaica · September 2, 2023 at 11:47 pm
На сайте https://shemi-otopleniya.jimdo.com/ представлена актуальная и ценная информация, которая касается гибкой подводки из нержавеющей стали самого разного размера, вида и типа. Можно подобрать вариант различной длины, диаметра и других параметров. Имеются качественные фотографии гибкой подводки в разных ракурсах. Вы сможете ознакомиться с гибкой подводкой 1 или 2 дюйма. Также перечислены сайты, на которых вы сможете приобрести такую продукцию. Все товары выполнены из надежных материалов, которые прослужат долго.
emidomus · September 3, 2023 at 3:56 am
На сайте https://hotel-elizabeth.ru/ вы сможете забронировать номер в популярном в Лазаревском отеле «Элизабет», где путешественников ожидает комфортный отдых, вместительные номера с удобными кроватями. В каждом номере есть все, что нужно: постельные принадлежности, фен, интернет. Предусмотрен корпус с рестораном, а также гриль-кафе, комфортный двор. Здесь приятно отдыхать не только взрослым, но и детям. Регулярно организуются интересные и фееричные шоу-программы, а для детей представление показывают аниматоры.
JamieVof · September 3, 2023 at 3:59 am
скачать покердом на андроид зеркало
скачать покердом на андроид зеркало
скачать покердом на андроид зеркало
JamieVof · September 3, 2023 at 4:06 am
скачать покердом на андроид зеркало
скачать покердом на андроид зеркало
скачать покердом на андроид зеркало
osipovEmich · September 3, 2023 at 8:53 am
На сайте https://www.vladdiplom.ru/ вы сможете ознакомиться с большим перечнем репетиторских услуг, а также получить консультацию для студентов и аспирантов. Мы оказываем услуги по всем дисциплинам и помогаем решить проблемные ситуации в учебе, даже с самыми сложными задачами. Специалисты центра Владдиплом имеют огромный опыт работ в любых направлениях связанных с учебой и оказывают только качественные услуги.
Jamestoump · September 3, 2023 at 10:39 am
Продвижение продуктов на маркетплейсах https://wbpower.ru/
alashUneda · September 3, 2023 at 5:52 pm
На сайте https://forexvision.ru/ почитайте информацию, которая касается особенностей торговли на Форексе. Он представляет собой самый крупный рынок финансов. Побывав на сайте, вы узнаете об основах работы, торговли на Форексе. Кроме того, будете в курсе преимуществ ведения деятельности на этом рынке. Он открывает для вас бесконечные возможности. Кроме того, требует небольших инвестиций, если сравнивать с другими проектами. На портале вы узнаете то, как начать торговать с самого начала.
Rudolph · September 3, 2023 at 5:59 pm
By the time she and Fred Astaire wrapped manufacturing on their ninth film alongside one another in 1939, equally actors had determined that their particular person talents were remaining underutilized in the provider of their group attempts, so.
My page … https://yasenevo.ru/index.php?action=profile&u=897759
ScottMiC · September 3, 2023 at 7:11 pm
purchase cytotec: п»їcytotec pills online – buy misoprostol over the counter
JimmyGidly · September 3, 2023 at 9:03 pm
casino kz
Zoila · September 3, 2023 at 9:04 pm
Fabrication in the course of the nineteen nineties became slowly rounder and ovoid, the Ford Taurus and Mercury Sable getting some of the more extreme illustrations. Most of Europe loved increasing prosperity during the nineties.
Here is my page; https://www.keralaplot.com/user/profile/4264304
CharlesCoown · September 3, 2023 at 11:15 pm
Реальные деньги ПОКЕРДОМ
Реальные деньги ПОКЕРДОМ
Реальные деньги ПОКЕРДОМ
Elane · September 3, 2023 at 11:45 pm
In 1989, he made The Adventures of Buttman, the initially in a popular collection which is credited with sparking the “gonzo” adult film style.
Visit my site :: https://Sustainabilipedia.org/index.php/7_Romantic_Online_Webcam_Chat_Ideas
Carrienoisp · September 4, 2023 at 12:49 am
cat casino код
https://boi.instgame.pro/forum/index.php?topic=23498.0
Добро пожаловать в удивительный мир азартных развлечений — Cat Casino, парадоксальное слияние элегантности и азарта. В этом 2023 году, Cat Casino стал бесспорным героем азартной индустрии, обещая незабываемые впечатления и бесконечное веселье. На Cat Casino, Кэт Казино вас ждет множество возможностей, будь вы опытный азартный игрок или новичок, только начинающий свой путь в мире карточных столов и игровых автоматов.Cat Casino заботится о вашей безопасности так же, как Кэт Казино заботится о своих маленьких мурлыках. Ваши данные и финансовые операции находятся под надежной защитой, благодаря нашей передовой технологии шифрования. Так что вы можете сосредоточиться только на одном — наслаждаться игрой и стремиться к победам.
Russelloffef · September 4, 2023 at 3:41 am
покердом официальный
покердом официальный
покердом официальный
varovFoogy · September 4, 2023 at 4:56 am
На сайте https://tobacco-spb.ru закажите натуральный табак оптом, а также аксессуары к нему. В разделе также имеются и все необходимые сопутствующие товары, которые сделают процесс наслаждения дымом более приятным. На всю продукцию установлены привлекательные цены, а доставка организуется в минимальные сроки. Перед вами самый большой ассортимент вкусного, ароматного табака. В разделе также представлены и машинки для набивки, а также сигаретная бумага, гильзы. И самое важное – все, что необходимо, теперь вы сможете приобрести в одном месте.
egoroPough · September 4, 2023 at 7:59 am
По ссылке https://www.youtube.com/watch?v=LSCUIgJ_3u4 ознакомьтесь с актуальным, интересным, информативным и свежим обзором дробовика. Здесь подробно рассказывается обо всех преимуществах. Это видео наглядно демонстрирует все положительные качества. Представлена вся нужная информация, которая поможет сориентироваться в выборе. Видео посмотрело уже несколько сотен человек, которые расширили свой уровень знаний. Вся информация является интересной и полезной, а особенно для того, кто интересуется данной темой.
FabianRal · September 4, 2023 at 9:56 am
вход на Покердом
https://t.me/s/bigwins_here
вход на Покердом
TimothyJat · September 4, 2023 at 11:13 am
neurontin tablets no script: neurontin tablets uk – buy neurontin 100 mg
Thomasbum · September 4, 2023 at 3:45 pm
покердом онлайн
покердом онлайн
покердом онлайн
Jeffreysob · September 4, 2023 at 7:03 pm
susu4d
susu4d
Floydgoato · September 4, 2023 at 7:42 pm
RIKVIP – Cổng Game Bài Đổi Thưởng Uy Tín và Hấp Dẫn Tại Việt Nam
Giới thiệu về RIKVIP (Rik Vip, RichVip)
RIKVIP là một trong những cổng game đổi thưởng nổi tiếng tại thị trường Việt Nam, ra mắt vào năm 2016. Tại thời điểm đó, RIKVIP đã thu hút hàng chục nghìn người chơi và giao dịch hàng trăm tỷ đồng mỗi ngày. Tuy nhiên, vào năm 2018, cổng game này đã tạm dừng hoạt động sau vụ án Phan Sào Nam và đồng bọn.
Tuy nhiên, RIKVIP đã trở lại mạnh mẽ nhờ sự đầu tư của các nhà tài phiệt Mỹ. Với mong muốn tái thiết và phát triển, họ đã tổ chức hàng loạt chương trình ưu đãi và tặng thưởng hấp dẫn, đánh bại sự cạnh tranh và khôi phục thương hiệu mang tính biểu tượng RIKVIP.
https://youtu.be/OlR_8Ei-hr0
Điểm mạnh của RIKVIP
Phong cách chuyên nghiệp
RIKVIP luôn tự hào về sự chuyên nghiệp trong mọi khía cạnh. Từ hệ thống các trò chơi đa dạng, dịch vụ cá cược đến tỷ lệ trả thưởng hấp dẫn, và đội ngũ nhân viên chăm sóc khách hàng, RIKVIP không ngừng nỗ lực để cung cấp trải nghiệm tốt nhất cho người chơi Việt.
Xktvoq · September 4, 2023 at 10:16 pm
order ferrous 100 mg online cheap where can i buy sotalol purchase sotalol sale
osipohoarl · September 5, 2023 at 1:22 am
На сайте https://kulinarij.ru/ представлены самые вкусные, интересные и необычные рецепты салатов, десертов, блюд из мяса, рыбы. Есть ароматные и вкусные супы, а также запеченные блюда, которые понравятся даже самому притязательному гурману. Имеются и рецепты приготовления блюд для приверженцев правильного питания. И самое главное, что все продукты максимально доступные, стоят недорого. Если и вы решили побаловать домашних вкусными угощениями, то скорей заходите на сайт, где есть все, что нужно.
mostbetzenjec · September 5, 2023 at 2:57 am
[url=https://mostbetzenjec.com/]mostbetzenjec.com[/url]
Mostbet bookmaker has been operating on the Russian demand since 2009. The office is owned by StarBet N.V. In Russia and in 92 other countries of the in the seventh heaven …
mostbetzenjec.com
Jeromenaddy · September 5, 2023 at 4:32 am
вход в покердом
вход в покердом
вход в покердом
Leonardfrerm · September 5, 2023 at 5:39 am
https://cytotec.auction/# Cytotec 200mcg price
HectorCuh · September 5, 2023 at 8:49 am
покердом слоты
покердом слоты
покердом слоты
erekhsix · September 5, 2023 at 4:14 pm
На сайте https://professions-info.ru/ вы сможете ознакомиться с плюсами и минусами профессий в России и странах СНГ. Подробно узнаете про специальности, зарплату, учебные заведения. Информация раскрывается легко и подробно в статьях. Сайт подойдет и тем, кто только выбирает на кого пойти учиться или кем стать по профессии, и тем кто хочет узнать интересные факты о своей профессии.
ermakkeerm · September 5, 2023 at 5:16 pm
На сайте https://vesna90.ru/ закажите уникальные энергоинформационные рисунки с печатью на майках, футболках различной цветовой гаммы. Вы обязательно найдете свой размер. Такое изделие, непременно, принесет радость и хорошее настроение, спасет от сглаза. Вся продукция реализуется под заказ. Регулярно организуются акции, выставляется товар дня, который позволяет совершить приобретение с большой скидкой. А самое важное, что на следующий день его стоимость поднимется. Для получения консультации просто позвоните менеджерам.
Keithsom · September 5, 2023 at 5:52 pm
покердом вход в личный кабинет
покердом вход в личный кабинет
покердом вход в личный кабинет
Robertohag · September 5, 2023 at 9:34 pm
казино покердом
https://t.me/s/kasino_pokerdom
казино покердом
EdwardFriew · September 5, 2023 at 10:56 pm
ПокерДом на телефон
ПокерДом на телефон
ПокерДом на телефон
Phillipp · September 5, 2023 at 11:05 pm
%%
Look into my web blog … https://kapelki-firefit.ru/
Bette · September 5, 2023 at 11:15 pm
The tunes movie for They Might Be Giants’ track “Hollywood House of Blues” involves an modern alternative rock band known as The Lads, whose direct singer wears an eyepatch.
Feel free to visit my web-site: https://utahsyardsale.com/author/hilton6451/
Nathanvot · September 6, 2023 at 2:01 am
покердом сайт зеркало
https://t.me/s/mirror_site_pokerdom
покердом сайт зеркало
CharlesTub · September 6, 2023 at 2:21 am
скачать покердом официальный сайт
https://t.me/s/skachat_pokerdom_oficialnyj_sajt
скачать покердом официальный сайт
Michaeltig · September 6, 2023 at 7:47 am
SURGASLOT Selaku Situs Terbaik Deposit Pulsa Tanpa Potongan Sepeser Pun
SURGASLOT menjadi pilihan portal situs judi online yang legal dan resmi di Indonesia. Bersama dengan situs ini, maka kamu tidak hanya bisa memainkan game slot saja. Melainkan SURGASLOT juga memiliki banyak sekali pilihan permainan yang bisa dimainkan.
Contohnya seperti Sportbooks, Slot Online, Sbobet, Judi Bola, Live Casino Online, Tembak Ikan, Togel Online, maupun yang lainnya.
Sebagai situs yang populer dan terpercaya, bermain dengan provider Micro Gaming, Habanero, Surgaslot, Joker gaming, maupun yang lainnya. Untuk pilihan provider tersebut sangat lengkap dan memberikan kemudahan bagi pemain supaya dapat menentukan pilihan provider yang sesuai dengan keinginan
стоматологов · September 6, 2023 at 4:59 pm
[url=https://zubkiexpert.ru/]Стоматологический сайт[/url]
«Клуб стоматологов» — фтизиостоматологический портал (фотосайт), чтобы размена эмпирически да знаниями по стоматологии. Сверху сайте есть новости равно заметки числом стоматологии, …
Стоматологический сайт
Willieton · September 6, 2023 at 6:41 pm
Промокод ПокерДом
https://t.me/s/promokodPokerDom
Промокод ПокерДом
Rosalie · September 6, 2023 at 6:56 pm
The exact experimental approach in dlgS97 mutant larvae reveals that the increase of http://www.Security.sbm.pw/user/wesleyburr/ calcium response is noticeably slower than the regulate moreover the restoration of the reaction is also noticeably slower.
Willieton · September 6, 2023 at 7:18 pm
Промокод ПокерДом
https://t.me/s/promokodPokerDom
Промокод ПокерДом
Robertsor · September 6, 2023 at 10:43 pm
Промокод в ПокерДом
https://t.me/s/promocod_pokerDom
Промокод в ПокерДом
Robertsor · September 6, 2023 at 11:14 pm
Промокод в ПокерДом
Промокод в ПокерДом
Промокод в ПокерДом
MichaelMycle · September 7, 2023 at 3:20 am
Промокод НА ПокерДом
https://t.me/s/promocod_na_PokerDom
Промокод НА ПокерДом
MichaelRipsy · September 7, 2023 at 5:20 am
регистрация на покердом
https://t.me/s/registracija_na_pokerdom
регистрация на покердом
JamesTen · September 7, 2023 at 5:29 am
drug neurontin 20 mg: gabapentin buy – neurontin pfizer
ThomasSes · September 7, 2023 at 8:06 am
Encountered a unique article – be sure to take a look and see for yourself http://u90517ol.beget.tech/2023/08/16/vstrecha-s-roskoshyu-elitnyy-eskort-dlya-nezabyvaemogo-vremeni.html
RichardDix · September 7, 2023 at 12:14 pm
https://omnias.wiki/index.php/Protect_Your_Digital_Life_With_ProHoster_VPN_Service
Stephenhus · September 7, 2023 at 2:34 pm
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
Stephenhus · September 7, 2023 at 3:21 pm
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
ScottMiC · September 7, 2023 at 3:30 pm
ivermectin over the counter canada: ivermectin brand – ivermectin for humans
Errolamist · September 7, 2023 at 3:37 pm
Покер POKERDOM
https://t.me/s/poker_pokerdom
Покер POKERDOM
Davidclels · September 7, 2023 at 3:37 pm
https://t.me/homerusso
eduardDaura · September 7, 2023 at 3:42 pm
На сайте https://dooby.ru/russia/nedvizhimost вы сможете подобрать квартиру для проживания в любом городе России. Есть как однокомнатные, так и двухкомнатные варианты. Все предложения уютные, комфортные, а потому точно подойдут клиенту с любым материальным достатком. Для того чтобы найти то, что нужно, необходимо воспользоваться специальным фильтром. Он отсортирует варианты по стоимости, количеству комнат, сроку размещения. Если у вас есть предложение, то вы также сможете его разместить.
sadovoe-tut.ru · September 7, 2023 at 3:45 pm
This article gives clear idea for the new people of blogging, that actually how to do blogging.
JohnnyOminK · September 7, 2023 at 4:01 pm
vevobahis581.com
JamieVof · September 7, 2023 at 4:27 pm
покердом официальный вход
покердом официальный вход
покердом официальный вход
Edwarddut · September 7, 2023 at 5:24 pm
Found an article that is worth reading – it’s really interesting! http://or1gano.80lvl.ru/viewtopic.php?f=10&t=435
TravisRip · September 7, 2023 at 5:32 pm
покердом официальный сайт играть на деньги
https://t.me/s/pokerdom_official_play_for_money
покердом официальный сайт играть на деньги
Errolamist · September 7, 2023 at 5:32 pm
Покер POKERDOM
https://t.me/s/poker_pokerdom
Покер POKERDOM
olymp trade promo code latest · September 7, 2023 at 5:44 pm
I am curious to find out wuat blog system you
have been utilizing? I’m experiencing some small security issues with my
olymp trade promo code latest website and I’d like
to fjnd something more safe. Do you have any suggestions?
ochkuttes · September 7, 2023 at 5:57 pm
На сайте https://t.me/s/rocketx_1win_aviatrix вы сможете ознакомиться с интересной, актуальной информацией, которая посвящена таким популярным и актуальным проектам, как: Aviatrix, Rocket X, Crash X. На этом сайте выкладываются самые последние новости, которые будут интересны всем игрокам: новичкам, а также профессионалам. Для того чтобы пройти регистрацию, необходимо перейти по ссылкам, которые находятся чуть ниже. Не упустите возможность получить выигрыш в несколько миллионов. У вас получится заработать на собственную мечту.
Billypaifs · September 7, 2023 at 6:37 pm
Честные отзывы о ПокерДом
https://t.me/s/pokerdom_otzivy
Честные отзывы о ПокерДом
ordeevVeR · September 7, 2023 at 6:39 pm
На сайте https://meow-kids.ru вы сможете приобрести качественную, красивую и износостойкую обувь как для девочек, так и мальчиков. Также можно приобрести привлекательную одежду, аквачешки. Вся обувь создана из современных, износостойких материалов, поэтому она не порвется и не потеряет своего лоска. Для развития стопы приобретайте анатомическую обувь. Для того чтобы сделать правильный выбор, почитайте любопытные тематические статьи. Имеются и интересные новости, из которых вы узнаете много нового.
agrosadovnik.ru · September 7, 2023 at 6:40 pm
I like the valuable information you provide in your articles. I will bookmark your weblog and check again here frequently. I am quite certain I will learn lots of new stuff right here! Good luck for the next!
Billypaifs · September 7, 2023 at 6:46 pm
Честные отзывы о ПокерДом
https://t.me/s/pokerdom_otzivy
Честные отзывы о ПокерДом
ksskins_rhymn · September 7, 2023 at 6:54 pm
кс 1.6 скачать на пк со скинами
lukinBag · September 7, 2023 at 6:55 pm
На сайте https://t.me/s/a_maxbet вы сможете узнать все актуальные, свежие интересующие новости сообщества Maxbet. Здесь только те данные, которые будут интересны всем, без исключения. Вся информация из проверенных источников, качественная, а потому ей можно доверять. Все данные составлены компетентными авторами, которые собирают только честную, свежую информацию. Регулярно на сайт добавляется новая информация, промокоды. Опубликованы 35 фотографий, более 43 000 заметок. Регулярно сайт посещает не одна сотня пользователей.
csbots_rhymn · September 7, 2023 at 7:11 pm
скачать кс 1 6 с ботами
Billypaifs · September 7, 2023 at 7:17 pm
Честные отзывы о ПокерДом
Честные отзывы о ПокерДом
Честные отзывы о ПокерДом
Errolamist · September 7, 2023 at 7:23 pm
Покер POKERDOM
Покер POKERDOM
Покер POKERDOM
Billypaifs · September 7, 2023 at 7:23 pm
Честные отзывы о ПокерДом
Честные отзывы о ПокерДом
Честные отзывы о ПокерДом
Errolamist · September 7, 2023 at 7:36 pm
Покер POKERDOM
https://t.me/s/poker_pokerdom
Покер POKERDOM
ubanokig · September 7, 2023 at 8:13 pm
По ссылке https://play.google.com/store/apps/details?id=com.explosionballs71234 вы получаете возможность сделать свои ставки в популярной БК «Sportingbet», которая приглашает всех любителей азарта. Важным моментом является то, что каждый новый зарегистрировавшийся пользователь получает бонус. Но для получения следует выполнить несложные манипуляции. Бонус можно потратить на свое усмотрение. Важно то, что все положенные средства вы получите в полном объеме и на свой счет.
HectorMak · September 7, 2023 at 8:41 pm
Regards, I enjoy this!
professional resume writing service charlotte nc [url=https://essaywritingservicelinked.com/]essay on service[/url] military service writing pdf [url=https://essaywritingservicetop.com/]writing a college application essay[/url] uk assignment writing service reviews self writing essay [url=https://quality-essays.com/]cheap essays to buy[/url] buy original essays online [url=https://buyanessayscheaponline.com/]order essay online[/url] buy university essay
JamesGet · September 7, 2023 at 9:09 pm
покердом вход в личный
покердом вход в личный
покердом вход в личный
Josefa · September 7, 2023 at 9:09 pm
id=”firstHeading” class=”firstHeading mw-first-heading”>Search rеsults
Help
English
Tools
Tools
m᧐ve tο sidebar hide
Actions
Ꮐeneral
my web site ladies watches women – Josefa,
JerryNup · September 7, 2023 at 10:03 pm
покердом зеркало на сегодня
покердом зеркало на сегодня
покердом зеркало на сегодня
JamesTen · September 7, 2023 at 10:17 pm
how much does ivermectin cost: ivermectin – ivermectin lotion for lice
JerryNup · September 7, 2023 at 10:18 pm
покердом зеркало на сегодня
покердом зеркало на сегодня
покердом зеркало на сегодня
anokhRoX · September 7, 2023 at 10:19 pm
На сайте https://xn—1-9kcp0afmice.xn--p1ai/ приобретите экологичные пеноблоки непосредственно с завода-изготовителя, а потому наценки минимальны. При этом организуется доставка по всей России. Для того чтобы получить расчет, необходимо оставить свой номер телефона в специальной форме. Менеджер, подсчитав, определит стоимость. Важным моментом является то, что стоимость от производителя, что дает возможность осуществить приобретение в любом объеме и сэкономив. Оплата происходит по факту.
Srnkqq · September 7, 2023 at 10:33 pm
enalapril pills how to get casodex without a prescription duphalac ca
MichaelDit · September 7, 2023 at 10:38 pm
ПокерДом на андроид
ПокерДом на андроид
ПокерДом на андроид
JamesGet · September 7, 2023 at 11:08 pm
покердом вход в личный
покердом вход в личный
покердом вход в личный
MichaelDit · September 7, 2023 at 11:18 pm
ПокерДом на андроид
ПокерДом на андроид
ПокерДом на андроид
MichaelDit · September 7, 2023 at 11:25 pm
ПокерДом на андроид
https://t.me/s/pokerdom_naandroid
ПокерДом на андроид
genshinimpactAvave · September 7, 2023 at 11:54 pm
Онлайн интернет-магазин символики и одежды онлайн игры Genshin Impact, где можно оформить заказ на футболки геншин с доставкой до квартиры в России по доступной цене
JamesGet · September 8, 2023 at 1:05 am
покердом вход в личный
https://t.me/s/pokerdom_vhod_v_lichnyj_kabinet
покердом вход в личный
Renaldo · September 8, 2023 at 1:25 am
Nicely put. Kudos!
breast · September 8, 2023 at 2:12 am
I used to be able tto find ցopod ɑdvice from your blog articleѕ.
Leonardfrerm · September 8, 2023 at 2:23 am
https://gabapentin.tech/# gabapentin 100mg
ikolskiRer · September 8, 2023 at 2:27 am
На сайте https://fonbet.com.by/ вы сможете ознакомиться с популярной БК «Фонбет». В настоящий момент является одной из лидирующих и популярных компаний, которая позволяет испытать свою удачу в спортивных состязаниях, а также казино. БК отличается огромным опытом в области оказания услуг в данном направлении. Она наделена международной лицензией, а также той, что выдали на местном уровне. Важным достоинством компании является огромный выбор развлечений на самый взыскательный вкус. Имеются как классические, так и современные слоты.
ai pron · September 8, 2023 at 2:48 am
Its like you read my mind! You seem to know a lot about this, like you wrote the book in it or something.
I think that you can do with a few pics to drive
the message home a little bit, but instead of that, this is magnificent blog.
An excellent read. I will definitely be back.
Harleyboone · September 8, 2023 at 2:49 am
покердом казино скачать
покердом казино скачать
покердом казино скачать
poshlamolliAvave · September 8, 2023 at 2:51 am
Онлайн мерчендайз атрибутики и одежды музыкальной группы Пошлая Молли, где можно купить на заказ футболка пошлая молли мерч с доставкой на дом до квартиры в России по лучшей цене
JamesGet · September 8, 2023 at 2:58 am
покердом вход в личный
покердом вход в личный
покердом вход в личный
JamesGet · September 8, 2023 at 3:12 am
покердом вход в личный
покердом вход в личный
покердом вход в личный
hevtsoacery · September 8, 2023 at 3:16 am
На сайте https://t.me/s/slotman_russia вы сможете ознакомиться с интересной, актуальной информацией, новостями, которые посвящены популярному проекту «Slotman». Он становится выбором многих азартных игроков, которые желают попытать свою удачу и сорвать неплохой куш. На этом канале регулярно публикуют новые данные, новости, а также промокоды. Этот сайт станет идеальным вариантом для тех, кто ищет новые развлечения, эмоции, а еще и хочет неплохо заработать. Для того чтобы пройти регистрацию, необходимо пройти по ссылке ниже.
Harleyboone · September 8, 2023 at 3:20 am
покердом казино скачать
https://t.me/s/pokerdom_kazino_skachat
покердом казино скачать
Harleyboone · September 8, 2023 at 3:26 am
покердом казино скачать
покердом казино скачать
покердом казино скачать
RobertboG · September 8, 2023 at 3:31 am
Explore the world of [url=https://killapods.eu/]killa[/url] with our exquisite range of flavors!
TimothyJat · September 8, 2023 at 4:02 am
ivermectin 3: ivermectin 500ml – generic ivermectin for humans
RogerCet · September 8, 2023 at 4:30 am
покердом вход зеркало
https://t.me/s/pokerdom_mirror_entrance
покердом вход зеркало
lshakoLer · September 8, 2023 at 4:35 am
На сайте https://t.me/s/win1_russia вы сможете узнать самую последнюю, актуальную и свежую информацию, которая касается популярной БК «1win». Вы узнаете много нового, увлекательного, а самое главное, что получите только подлинную информацию, которая будет полезна каждому, кто разбирается в данной теме и следит за обновлениями. Приятная новость для новичков – здесь находится промокод, которым вы сможете воспользоваться, если решили посетить контору впервые. Вы сможете рассчитывать на бонус в 500%. Регулярно публикуются картинки, интересные фотографии, статьи.
GeorgeEluck · September 8, 2023 at 4:47 am
зеркало казино покердом
зеркало казино покердом
зеркало казино покердом
voronirasty · September 8, 2023 at 5:28 am
По ссылке https://play.google.com/store/apps/details?id=com.soccerball130.pong423 вы сможете сделать ставки в одной из самых популярных и надежных БК – «Betcity». Компанию основали в 2003 году, имеет лицензию. Принимает ставки как онлайн, так и офлайн. Функционал предполагает комфортное пользование сайтом, ведь здесь есть все необходимое, чтобы удобно совершать ставки. В мобильной версии, как и на официальном портале, вы сможете воспользоваться бесплатной регистрацией, войти в личный кабинет, посмотреть баланс.
Robertparee · September 8, 2023 at 5:53 am
Discover the finest zyn flavors for an exceptional vaping experience! Explore our diverse selection of flavors and find the [url=https://killapods.eu/product/zyn-ginger-blood-orange/]best zyn flavor[/url] that suits your taste!
ScottMiC · September 8, 2023 at 6:27 am
buy neurontin 100 mg: neurontin over the counter – how much is neurontin pills
Jamessaw · September 8, 2023 at 6:42 am
покердом казино официальный сайт
покердом казино официальный сайт
покердом казино официальный сайт
Terrydigma · September 8, 2023 at 6:44 am
покердом онлайн играть
https://t.me/s/pokerdom_onlain
покердом онлайн играть
GeorgeEluck · September 8, 2023 at 6:49 am
зеркало казино покердом
https://t.me/s/pokerdom_sloty
зеркало казино покердом
Jamessaw · September 8, 2023 at 6:51 am
покердом казино официальный сайт
https://t.me/s/pokerdom_kazino_oficialnyj_sajt
покердом казино официальный сайт
Terrydigma · September 8, 2023 at 6:59 am
покердом онлайн играть
покердом онлайн играть
покердом онлайн играть
Jamessaw · September 8, 2023 at 7:23 am
покердом казино официальный сайт
покердом казино официальный сайт
покердом казино официальный сайт
Jamessaw · September 8, 2023 at 7:29 am
покердом казино официальный сайт
https://t.me/s/pokerdom_kazino_oficialnyj_sajt
покердом казино официальный сайт
rabotavkemerovobop · September 8, 2023 at 7:33 am
Работа в Кемерово
Johndup · September 8, 2023 at 7:36 am
Explore the world of delicious [url=https://killapods.eu/product/siberia-slim-80/]siberian pouches[/url] with our fantastic variety!
Alyce · September 8, 2023 at 8:02 am
Customs officials caught onto the scheme and executed a sting operation, marking information purchased for the worldwide market with invisible ink and subsequently shopping for them on the domestic market.
Have a look at my site: http://www.turkiyemsin.net/author/natewoods855/
Floydgoato · September 8, 2023 at 8:12 am
總統大選,2024總統大選
《2024總統大選:台灣的新篇章》
2024年,對台灣來說,是一個重要的歷史時刻。這一年,台灣將迎來又一次的總統大選,這不僅僅是一場政治競技,更是台灣民主發展的重要標誌。
### 2024總統大選的背景
隨著全球政治經濟的快速變遷,2024總統大選將在多重背景下進行。無論是國際間的緊張局勢、還是內部的政策調整,都將影響這次選舉的結果。
### 候選人的角逐
每次的總統大選,都是各大政黨的領袖們展現自己政策和領導才能的舞台。2024總統大選,無疑也會有一系列的重量級人物參選,他們的政策理念和領導風格,將是選民最關心的焦點。
### 選民的選擇
2024總統大選,不僅僅是政治家的競技場,更是每一位台灣選民表達自己政治意識的時刻。每一票,都代表著選民對未來的期望和願景。
### 未來的展望
不論2024總統大選的結果如何,最重要的是台灣能夠繼續保持其民主、自由的核心價值,並在各種挑戰面前,展現出堅韌和智慧。
結語:
2024總統大選,對台灣來說,是新的開始,也是新的挑戰。希望每一位選民都能夠認真思考,為台灣的未來做出最好的選擇。
TimothySpank · September 8, 2023 at 8:28 am
Found an enthralling read that I’d recommend – it’s truly fascinating http://andronxxl.build2.ru/viewtopic.php?id=3290#p6723
GeorgeEluck · September 8, 2023 at 8:46 am
зеркало казино покердом
зеркало казино покердом
зеркало казино покердом
Robertdup · September 8, 2023 at 8:58 am
https://seo-doors.ru seo продвижение сайта
Russellreoto · September 8, 2023 at 9:39 am
539開獎
《539開獎:探索台灣的熱門彩券遊戲》
539彩券是台灣彩券市場上的一個重要組成部分,擁有大量的忠實玩家。每當”539開獎”的時刻來臨,不少人都會屏息以待,期盼自己手中的彩票能夠帶來好運。
### 539彩券的起源
539彩券在台灣的歷史可以追溯到數十年前。它是為了滿足大眾對小型彩券遊戲的需求而誕生的。與其他大型彩券遊戲相比,539的玩法簡單,投注金額也相對較低,因此迅速受到了大眾的喜愛。
### 539開獎的過程
“539開獎”是一個公正、公開的過程。每次開獎,都會有專業的工作人員和公證人在場監督,以確保開獎的公正性。開獎過程中,專業的機器會隨機抽取五個號碼,這五個號碼就是當期的中獎號碼。
### 如何參與539彩券?
參與539彩券非常簡單。玩家只需要到指定的彩券銷售點,選擇自己心儀的五個號碼,然後購買彩票即可。當然,現在也有許多線上平台提供539彩券的購買服務,玩家可以不出門就能參與遊戲。
### 539開獎的魅力
每當”539開獎”的時刻來臨,不少玩家都會聚集在電視機前,或是上網查詢開獎結果。這種期待和緊張的感覺,就是539彩券吸引人的地方。畢竟,每一次開獎,都有可能創造出新的百萬富翁。
### 結語
539彩券是台灣彩券市場上的一顆明星,它以其簡單的玩法和低廉的投注金額受到了大眾的喜愛。”539開獎”不僅是一個遊戲過程,更是許多人夢想成真的機會。但需要提醒的是,彩券遊戲應該理性參與,不應過度沉迷,更不應該拿生活所需的資金來投注。希望每一位玩家都能夠健康、快樂地參與539彩券,享受遊戲的樂趣。
Noella · September 8, 2023 at 9:42 am
Amazing write ups. Many thanks!
Russellreoto · September 8, 2023 at 10:29 am
娛樂城
《娛樂城:線上遊戲的新趨勢》
在現代社會,科技的發展已經深深地影響了我們的日常生活。其中,娛樂行業的變革尤為明顯,特別是娛樂城的崛起。從實體遊樂場所到線上娛樂城,這一轉變不僅帶來了便利,更為玩家提供了前所未有的遊戲體驗。
### 娛樂城APP:隨時隨地的遊戲體驗
隨著智慧型手機的普及,娛樂城APP已經成為許多玩家的首選。透過APP,玩家可以隨時隨地參與自己喜愛的遊戲,不再受到地點的限制。而且,許多娛樂城APP還提供了專屬的優惠和活動,吸引更多的玩家參與。
### 娛樂城遊戲:多樣化的選擇
傳統的遊樂場所往往受限於空間和設備,但線上娛樂城則打破了這一限制。從經典的賭場遊戲到最新的電子遊戲,娛樂城遊戲的種類繁多,滿足了不同玩家的需求。而且,這些遊戲還具有高度的互動性和真實感,使玩家仿佛置身於真實的遊樂場所。
### 線上娛樂城:安全與便利並存
線上娛樂城的另一大優勢是其安全性。許多線上娛樂城都採用了先進的加密技術,確保玩家的資料和交易安全。此外,線上娛樂城還提供了多種支付方式,使玩家可以輕鬆地進行充值和提現。
然而,選擇線上娛樂城時,玩家仍需謹慎。建議玩家選擇那些具有良好口碑和正規授權的娛樂城,以確保自己的權益。
結語:
娛樂城,無疑已經成為當代遊戲行業的一大趨勢。無論是娛樂城APP、娛樂城遊戲,還是線上娛樂城,都為玩家提供了前所未有的遊戲體驗。然而,選擇娛樂城時,玩家仍需保持警惕,確保自己的安全和權益。
Henrietta · September 8, 2023 at 10:33 am
Additionally, it’s terrific that there are a lot of customers on this on the internet hub, but the simple fact that it doesn’t have any age restrictions would make for a tough sexting expertise.
Feel free to visit my web site; http://www.Invest74.ru/index.php?action=profile&u=1453085
GeorgeEluck · September 8, 2023 at 10:33 am
зеркало казино покердом
https://t.me/s/pokerdom_sloty
зеркало казино покердом
Jerrynaill · September 8, 2023 at 10:44 am
2022 ПокерДом отзывы
https://t.me/s/pokerdom_2022
2022 ПокерДом отзывы
Russellreoto · September 8, 2023 at 10:45 am
娛樂城遊戲
《娛樂城:線上遊戲的新趨勢》
在現代社會,科技的發展已經深深地影響了我們的日常生活。其中,娛樂行業的變革尤為明顯,特別是娛樂城的崛起。從實體遊樂場所到線上娛樂城,這一轉變不僅帶來了便利,更為玩家提供了前所未有的遊戲體驗。
### 娛樂城APP:隨時隨地的遊戲體驗
隨著智慧型手機的普及,娛樂城APP已經成為許多玩家的首選。透過APP,玩家可以隨時隨地參與自己喜愛的遊戲,不再受到地點的限制。而且,許多娛樂城APP還提供了專屬的優惠和活動,吸引更多的玩家參與。
### 娛樂城遊戲:多樣化的選擇
傳統的遊樂場所往往受限於空間和設備,但線上娛樂城則打破了這一限制。從經典的賭場遊戲到最新的電子遊戲,娛樂城遊戲的種類繁多,滿足了不同玩家的需求。而且,這些遊戲還具有高度的互動性和真實感,使玩家仿佛置身於真實的遊樂場所。
### 線上娛樂城:安全與便利並存
線上娛樂城的另一大優勢是其安全性。許多線上娛樂城都採用了先進的加密技術,確保玩家的資料和交易安全。此外,線上娛樂城還提供了多種支付方式,使玩家可以輕鬆地進行充值和提現。
然而,選擇線上娛樂城時,玩家仍需謹慎。建議玩家選擇那些具有良好口碑和正規授權的娛樂城,以確保自己的權益。
結語:
娛樂城,無疑已經成為當代遊戲行業的一大趨勢。無論是娛樂城APP、娛樂城遊戲,還是線上娛樂城,都為玩家提供了前所未有的遊戲體驗。然而,選擇娛樂城時,玩家仍需保持警惕,確保自己的安全和權益。
GeorgeEluck · September 8, 2023 at 10:46 am
зеркало казино покердом
зеркало казино покердом
зеркало казино покердом
Jerrynaill · September 8, 2023 at 10:53 am
2022 ПокерДом отзывы
https://t.me/s/pokerdom_2022
2022 ПокерДом отзывы
CarlosPeake · September 8, 2023 at 10:58 am
Прогон хрумером
Russellreoto · September 8, 2023 at 11:04 am
娛樂城
《娛樂城:線上遊戲的新趨勢》
在現代社會,科技的發展已經深深地影響了我們的日常生活。其中,娛樂行業的變革尤為明顯,特別是娛樂城的崛起。從實體遊樂場所到線上娛樂城,這一轉變不僅帶來了便利,更為玩家提供了前所未有的遊戲體驗。
### 娛樂城APP:隨時隨地的遊戲體驗
隨著智慧型手機的普及,娛樂城APP已經成為許多玩家的首選。透過APP,玩家可以隨時隨地參與自己喜愛的遊戲,不再受到地點的限制。而且,許多娛樂城APP還提供了專屬的優惠和活動,吸引更多的玩家參與。
### 娛樂城遊戲:多樣化的選擇
傳統的遊樂場所往往受限於空間和設備,但線上娛樂城則打破了這一限制。從經典的賭場遊戲到最新的電子遊戲,娛樂城遊戲的種類繁多,滿足了不同玩家的需求。而且,這些遊戲還具有高度的互動性和真實感,使玩家仿佛置身於真實的遊樂場所。
### 線上娛樂城:安全與便利並存
線上娛樂城的另一大優勢是其安全性。許多線上娛樂城都採用了先進的加密技術,確保玩家的資料和交易安全。此外,線上娛樂城還提供了多種支付方式,使玩家可以輕鬆地進行充值和提現。
然而,選擇線上娛樂城時,玩家仍需謹慎。建議玩家選擇那些具有良好口碑和正規授權的娛樂城,以確保自己的權益。
結語:
娛樂城,無疑已經成為當代遊戲行業的一大趨勢。無論是娛樂城APP、娛樂城遊戲,還是線上娛樂城,都為玩家提供了前所未有的遊戲體驗。然而,選擇娛樂城時,玩家仍需保持警惕,確保自己的安全和權益。
Jerrynaill · September 8, 2023 at 11:24 am
2022 ПокерДом отзывы
2022 ПокерДом отзывы
2022 ПокерДом отзывы
Jerrynaill · September 8, 2023 at 11:30 am
2022 ПокерДом отзывы
2022 ПокерДом отзывы
2022 ПокерДом отзывы
JohnStIll · September 8, 2023 at 11:56 am
Discover the amazing world of [url=https://killapods.eu/product/skruf-fresh-5/]skruf slim[/url] products that will elevate your snus experience to new heights!
Williemycle · September 8, 2023 at 12:15 pm
PokerDom ПокерДом
PokerDom ПокерДом
PokerDom ПокерДом
Buttface · September 8, 2023 at 12:37 pm
I dо trust alⅼ of the ideas you’ve introdսced to your post.
They are very convіncing and wil definitely work. Nonetheless,
the poѕts are very bгief for novices.May you please
prolong hem a little from subsequent time? Thank уou for the post.
lezhkaMuh · September 8, 2023 at 12:37 pm
На сайте https://t.me/s/party_casinos вы получите всю актуальную информацию, которая касается проекта «PARTY CASINO». Здесь всегда публикуются свежие, новые данные о проекте, чтобы вы узнали о них первым. Постоянно выставляется новый промокод, который поможет вам существенно сэкономить. Для того чтобы вам улыбнулась удача, необходимо лишь покрутить слоты, что позволит без труда набрать очки. Станьте участником акции и получите возможность выиграть множество призов. Главный приз – это джекпот, который составляет 10 000 евро.
JohnN · September 8, 2023 at 12:43 pm
Discover the amazing world of [url=https://killapods.eu/product/iceberg-cola/]iceberg nicotine pouches[/url] with our diverse range of flavors!
vanyavet · September 8, 2023 at 12:59 pm
На сайте https://t.me/s/marsbet_ru ознакомьтесь с интересными, увлекательными новостями, посвященными проекту «MARSBET», который работает официально и постоянно радует любителей азартных игр. Здесь не только ценная, важная и актуальная информация, но и приятный бонус – промокоды для новичков, желающих попытать свою удачу впервые. Вас ждет удивительная, яркая и интересная игра! Постоянно разыгрываются призы, о которых вы узнаете первым, если будете периодически заходить на этот Телеграмм Канал.
serezdap · September 8, 2023 at 1:18 pm
По ссылке https://play.google.com/store/apps/details?id=com.f0otb4ll.fl0w вы сможете поиграть в интересные и увлекательные игры, которые созданы проверенными, надежными разработчиками ПО. GG.BET представляет собой виртуальную площадку, где представлена не одна сотня игр. У вас получится осуществить ставки как бесплатно, так и на деньги. Вы будете не только наслаждаться регулярными выигрышами, но и приятной, непринужденной атмосферой. Администрация уважает клиентов, а потому регулярно радует бонусной системой, предлагает промокоды. Выгодные условия для новичков.
Jeffreyarola · September 8, 2023 at 1:41 pm
Stumbled upon a captivating article – definitely take a look! https://forum-otzyv.ru/newthread.php?fid=56&processed=1
Williemycle · September 8, 2023 at 2:11 pm
PokerDom ПокерДом
PokerDom ПокерДом
PokerDom ПокерДом
Leonardfrerm · September 8, 2023 at 2:38 pm
http://cytotec.auction/# buy cytotec online fast delivery
JorgeSex · September 8, 2023 at 2:44 pm
Отзывы игроков ПокерДом
https://t.me/s/igroki_o_pokerdome
Отзывы игроков ПокерДом
JorgeSex · September 8, 2023 at 2:53 pm
Отзывы игроков ПокерДом
Отзывы игроков ПокерДом
Отзывы игроков ПокерДом
John1 · September 8, 2023 at 2:54 pm
Discover the amazing world of [url=https://killapods.eu/product/iceberg-cola/]iceberg nicotine pouches[/url] with our diverse range of flavors!
Самсон · September 8, 2023 at 3:23 pm
Подъем домов
JorgeSex · September 8, 2023 at 3:25 pm
Отзывы игроков ПокерДом
https://t.me/s/igroki_o_pokerdome
Отзывы игроков ПокерДом
JorgeSex · September 8, 2023 at 3:31 pm
Отзывы игроков ПокерДом
https://t.me/s/igroki_o_pokerdome
Отзывы игроков ПокерДом
JamesTen · September 8, 2023 at 3:32 pm
Cytotec 200mcg price: cytotec abortion pill – order cytotec online
Randyboupt · September 8, 2023 at 3:36 pm
покердом покер скачать
покердом покер скачать
покердом покер скачать
MichaelRipsy · September 8, 2023 at 3:40 pm
регистрация на покердом
https://t.me/s/registracija_na_pokerdom
регистрация на покердом
Boris · September 8, 2023 at 3:56 pm
Appreciate it, Lots of content!
Kevintug · September 8, 2023 at 3:59 pm
ПокерДом ВОЙТИ СЕЙЧАС
https://t.me/s/vhod_pokerdom_tut
ПокерДом ВОЙТИ СЕЙЧАС
VictorenvEt · September 8, 2023 at 4:09 pm
539
《539彩券:台灣的小確幸》
哎呀,說到台灣的彩券遊戲,你怎麼可能不知道539彩券呢?每次”539開獎”,都有那麼多人緊張地盯著螢幕,心想:「這次會不會輪到我?」。
### 539彩券,那是什麼來頭?
嘿,539彩券可不是昨天才有的新鮮事,它在台灣已經陪伴了我們好多年了。簡單的玩法,小小的投注,卻有著不小的期待,難怪它這麼受歡迎。
### 539開獎,是場視覺盛宴!
每次”539開獎”,都像是一場小型的節目。專業的主持人、明亮的燈光,還有那台專業的抽獎機器,每次都帶給我們不小的刺激。
### 跟我一起玩539?
想玩539?超簡單!走到街上,找個彩券行,選五個你喜歡的號碼,買下來就對了。當然,現在科技這麼發達,坐在家裡也能買,多方便!
### 539開獎,那刺激的感覺!
每次”539開獎”,真的是讓人既期待又緊張。想像一下,如果這次中了,是不是可以去吃那家一直想去但又覺得太貴的餐廳?
### 最後說兩句
539彩券,真的是個小確幸。但嘿,玩彩券也要有度,別太沉迷哦!希望每次”539開獎”,都能帶給你一點點的驚喜和快樂。
Javierinave · September 8, 2023 at 7:24 pm
Бонусы за регистрацию на ПОКЕРДОМЕ
Бонусы за регистрацию на ПОКЕРДОМЕ
Бонусы за регистрацию на ПОКЕРДОМЕ
WendellMulky · September 8, 2023 at 8:09 pm
покердом зеркало рабочее на сегодня
https://t.me/s/rabochee_zerkalo_pokerdom
покердом зеркало рабочее на сегодня
Errolamist · September 8, 2023 at 8:29 pm
Покер POKERDOM
Покер POKERDOM
Покер POKERDOM
Спортзал · September 8, 2023 at 8:30 pm
[url=https://gymzenchiks.vn.ua/]Спортзал Вінниця[/url]
Компанія «Спортзал В ТЕЧЕНИЕінниця» – це такий центр, -де ступень готуємо Вы до прекрасної букваізичної форми. Основна наша головна вулиця – вул. Сергіэго Пліско, 067. У нас є другий вхід после вул. Фон-баронікахівського, 10. У нас є багато букваітнес-тренерів, якожеі зможуть допомогти Для вас досягти поставлених букваілей. Свойі тренери було проходили перцензуру багатьох висококласних програм та завжди готові букваідійти до Ваших потреб.
Спортзал Вінниця
полуавтомат · September 8, 2023 at 8:53 pm
[url=https://svarochnyj-apparat-poluavtomat.ru/]сварочный полуавтомат[/url]
Приобрести Сварочные полуавтоматы – свыше 1196 товаров числом стоимости через 1200 рублев с стремительной равным образом даровой доставкой в 690+ магазинов а также залогом числом и стар и млад России: …
сварочный полуавтомат
nechkDip · September 8, 2023 at 8:54 pm
На сайте https://radhosting.ru/ вы сможете воспользоваться такой важной и нужной услугой, как аренда игрового сервера, а также рядом дополнительных услуг. Важным преимуществом портала является то, что он предлагает оперативную техническую поддержку, а также быструю, легкую передачу сервера клиенту. Вы сможете по достоинству оценить все привилегии сервиса. Такой хостинг является качественным и работает только с использованием современного, продвинутого программного обеспечения. Воспользуйтесь услугой и вы.
olpakoweple · September 9, 2023 at 12:18 am
На сайте https://python-obuchenie-1.ru ознакомьтесь с рейтингом лучших курсов Python для тех, кто только решил познать программу. Перед вами 62 курса с описанием каждого из них. Так вы узнаете о том, для кого они предназначены и какую пользу принесут. На всех курсах вы узнаете качественную, актуальную и интересную информацию, которая поможет получить новые навыки, профессию или просто расширить кругозор. Кроме того, многие курсы предполагают последующее трудоустройство. Некоторые школы обучают несколько месяцев, чтобы вы освоили все навыки.
DuaneDok · September 9, 2023 at 12:43 am
покердом зеркало сегодня
https://t.me/s/pokerdom_zerkalo_segodnya1
покердом зеркало сегодня
sborkics_jef · September 9, 2023 at 1:09 am
кс 1 6 сборки
JamesGet · September 9, 2023 at 1:17 am
покердом вход в личный
https://t.me/s/pokerdom_vhod_v_lichnyj_kabinet
покердом вход в личный
Raymondplups · September 9, 2023 at 2:22 am
РейкБек ПокерДом
РейкБек ПокерДом
РейкБек ПокерДом
RodneyDor · September 9, 2023 at 2:25 am
онлайн казино brillx сайт
brillx официальный сайт
Вас ждет огромный выбор игровых аппаратов, способных удовлетворить даже самых изысканных игроков. Брилкс Казино знает, как удивить вас каждым спином. Насладитесь блеском и сиянием наших игр, ведь каждый слот — это как бриллиант, который только ждет своего обладателя. Неважно, играете ли вы ради веселья или стремитесь поймать удачу за хвост и выиграть крупный куш, Brillx сделает все возможное, чтобы удовлетворить ваши азартные желания.Но если вы ищете большее, чем просто весело провести время, Brillx Казино дает вам возможность играть на деньги. Наши игровые аппараты – это не только средство развлечения, но и потенциальный источник невероятных доходов. Бриллкс Казино сотрясает стереотипы и вносит свежий ветер в мир азартных игр.
Roberttox · September 9, 2023 at 4:19 am
Experience the world of [url=https://killapods.eu/product/zyn-ginger-blood-orange/]best zyn flavors[/url] with our diverse collection of flavors!
procardia coupon · September 9, 2023 at 5:43 am
etodolac uk cheap etodolac 200mg etodolac 400 mg pharmacy
orneepaino · September 9, 2023 at 5:46 am
На сайте https://kitchen-grill.ru вы сможете ознакомиться с простыми рецептами блюд, созданных из самых простых и недорогих продуктов. С помощью них вы сможете приготовить компот, изысканные салаты из рыбы и свежего огурца, а также яичницу. Есть и рецепты рубленых котлет из курицы с добавлением кабачков. Возможно, вам понравится маринованная капуста быстрого приготовления. Что бы вы ни запланировали, обязательно найдете рецепт на этом сайте и накормите всю семью вкусной едой. Регулярно на портал добавляются новые рецепты для сытных обедов и ужинов.
GeorgeEluck · September 9, 2023 at 5:49 am
зеркало казино покердом
зеркало казино покердом
зеркало казино покердом
Eddiehup · September 9, 2023 at 6:22 am
Покердом приложение
Покердом приложение
Покердом приложение
rtamoRot · September 9, 2023 at 7:05 am
На сайте https://practicalbinary.ru/kak-vernut-dengi-proigrannyie-v-onlayn-kazino/ вы сможете ознакомиться с информацией, которая поможет вам вернуть деньги онлайн в казино легальными способами. Кроме того, вы получите ответ на вопрос о том, можно ли вообще вернуть средства. Также рассматривается то, как вернуть средства при помощи общепринятой процедуры чарджбэк. А если вам необходима профессиональная поддержка, помощь или консультация, то вы сможете написать квалифицированному специалисту.
Michaelicots · September 9, 2023 at 10:08 am
скачать покердом зеркало
https://t.me/s/skachat_pokerdom_zerkalo3
скачать покердом зеркало
John#Doe[Ultrawire,2,5] · September 9, 2023 at 11:04 am
Discover the amazing world of [url=https://killapods.eu/product/zyn-ginger-blood-orange/]zyn pouches flavors[/url] and savor the variety of tastes!
ravtsoRet · September 9, 2023 at 11:27 am
На сайте https://morgenmoney.ru/ каждый желающий получает возможность заработать приличную сумму денег, не выходя из дома. Здесь вы получите оплату за просмотр сайтов, выполнение нехитрых заданий. Кроме того, вас ожидают приятные бонусы, увлекательные конкурсы, выплаты, которые происходят на регулярной основе. Если вам необходимо недорого раскрутить сайт, то скорей обращайтесь на этот портал, на котором имеется все, что нужно. К примеру, недорогие визиты либо отыскать рефералов.
строительство загородное · September 9, 2023 at 1:37 pm
строительство загородное
отчетные документы за проживание москва · September 9, 2023 at 4:01 pm
It’s enormous that you are getting ideas from this piece of writing as well as from our discussion made at this place.
John#Smith[Ihoqebuqeqoprywu,2,5] · September 9, 2023 at 8:46 pm
Discover the exciting world of [url=https://killapods.eu/product/killa-watermelon-flash/]flash vapes[/url] with our new collection of flavors!
csbots_emaic · September 9, 2023 at 10:25 pm
контра страйк 1.6 скачать торрентом
Williameveno · September 9, 2023 at 11:37 pm
Покердом Рейкбек
https://t.me/s/reikbek_pokerDom
Покердом Рейкбек
FloydIcole · September 10, 2023 at 1:09 am
Официальный сайт ПокерДом
Официальный сайт ПокерДом
Официальный сайт ПокерДом
CharlesOnete · September 10, 2023 at 1:22 am
https://vc.ru/u/1895184-timur-bektimirov/825135-carskie-monety-investiciya-ili-istoriya/
Visit website · September 10, 2023 at 4:12 am
As pointed out, you have to bet appropriately on every single single leg in a parlay
to win.
my site Visit website
Robert#John[Dylan,2,5] · September 10, 2023 at 5:49 am
Discover the incredible world of [url=https://killapods.eu/product/zyn-ginger-blood-orange/]all zyn flavors[/url] and savor the unique taste of our premium collection!
nmrtc camp lejeune · September 10, 2023 at 7:52 am
I’m not sure exactly why but this blog is loading extremely slow for me.
Is anyone else having this problem or is it a issue on my end?
I’ll check back later on and see if the problem still exists.
View website · September 10, 2023 at 8:41 am
A judge lately dissolved a pact allowing the Seminole Tribe to control
sports wagering.
My homepage View website
iryushJesty · September 10, 2023 at 8:42 am
На сайте https://play.google.com/store/apps/details?id=com.ba11h00per.ba8ketb0all&hl=ru&gl=ru вы сможете сделать ставки в одной из самых популярных БК «Олимпбет». Она начала свою деятельность в далеком 2004 году и считается одной из самых популярных. Ставки принимаются в режиме онлайн. Эта компания является лицензированной. В настоящий момент деятельность букмекера прогрессирует, он не перестает развиваться в своем направлении. Особый упор делает на футбольную линию, в которой предлагаются котировки высокого уровня.
zlovsRodia · September 10, 2023 at 2:24 pm
На сайте https://aviator-games-online.ru вы сможете сыграть в популярную игру «Aviator» и абсолютно бесплатно. Важным моментом является то, что наслаждаться процессом вы сможете в любое время. Не нужно проходить многоступенчатую регистрацию, а также вносить средства. Игра невероятно привлекательна для пользователей различных возрастов. Но необходимо понимать, что любой спин связан с финансовыми потерями. Играть в такую игру сможет пользователь, независимо от уровня подготовки.
https://wiki.nerdbird.media · September 10, 2023 at 4:52 pm
When depositing funds into an current account, verify if ongoing reload gives are readily available.
Review my blog post: https://wiki.nerdbird.media
free live porn · September 10, 2023 at 5:24 pm
I got this website from my friend who told me on the topic of
this web site and now this time I am browsing this web site and
reading very informative content at this time.
best online casino · September 10, 2023 at 5:39 pm
Today, I went to the beach front with my children. I found a sea shell and gave
it to my 4 year old daughter and said “You can hear the ocean if you put this to your ear.” She placed the
shell to her ear and screamed. There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is completely off topic but I had to tell someone!
JohnMaize · September 10, 2023 at 6:35 pm
Discover the exciting world of [url=https://killapods.eu/product-category/nicopods/skruf/]skruf[/url] and indulge in its unique flavors!
WendellMulky · September 10, 2023 at 6:48 pm
покердом зеркало рабочее на сегодня
https://t.me/s/rabochee_zerkalo_pokerdom
покердом зеркало рабочее на сегодня
Click here! · September 10, 2023 at 7:10 pm
Very nice article. I definitely appreciate
this website. Keep it up!
Feel free to surf to my web-site :: Click here!
bulatSoamy · September 10, 2023 at 7:29 pm
На сайте https://morgenmoney.ru/ вы сможете заработать неплохие средства на просмотре сайтов, получите оплату при условии выполнения определенных заданий. Регулярно устраиваются увлекательные, интересные конкурсы, в которых вы сможете получить неплохой приз. Все выплаты происходят в автоматическом режиме и максимально оперативно. Сайт окажется полезен и рекламодателям, которые смогут здесь отыскать рефералов по небольшой цене. Здесь же у вас получится приобрести дешевые визиты на портал.
Jamesexick · September 10, 2023 at 7:52 pm
Первый депозит ПокерДом
https://t.me/s/promocod_na_perviy_deposit
Первый депозит ПокерДом
ridovhal · September 10, 2023 at 7:54 pm
На сайте https://xn—-ctbog0adgin0a5eb.xn--p1ai/threads/kak-ja-obratilas-za-pomoschju-k-xakeru-otzyv-o-xakere-dark-web.365/ ознакомьтесь с отзывом об одном хакере, который помог решить проблему пользователю Kelly. Компетентный специалист помог получить доступ к паролям электронной почты, телефона. Хакер открыл женщине глаза на ужасные вещи: муж, будучи ее замом в одной крупной компании, сливал информацию о ней конкурентам. По этой причине клиенты уходили к ним. Компетентный специалист помог справиться с задачей. Для него нет нерешаемых проблем.
ElijahBum · September 10, 2023 at 7:58 pm
top 10 pharmacies in india [url=https://indiaph.life/#]Medical Store in India[/url] п»їlegitimate online pharmacies india
MichaelRipsy · September 10, 2023 at 9:04 pm
регистрация на покердом
https://t.me/s/registracija_na_pokerdom
регистрация на покердом
Stevegek · September 10, 2023 at 9:28 pm
http://canadaph.life/# canadian pharmacy no scripts
syushAdeld · September 10, 2023 at 9:30 pm
На сайте https://t.me/s/zerkalo1xbetrabochee вы сможете узнать актуальное и новое зеркало на сегодняшнюю дату. Кроме того, ознакомитесь с результатами игр, получите много новой информации, которая поможет вам лучшие разобраться во всех вопросах. Вы узнаете, чем закончился поединок на днях или вчера. На портале очень много важной, ценной информации, которая потребуется вам, чтобы сориентироваться в теме. А новички смогут воспользоваться промокодом. На сайте регулярно появляется новая информация, а также новости этого сообщества. Информация сопровождается картинками, цветными фотографиями.
jilibet 711 · September 10, 2023 at 10:02 pm
Hurrah, that’s what I was exploring for, what a information! present here at this web site, thanks admin of this site.
yeremnob · September 10, 2023 at 10:17 pm
На сайте https://play.google.com/store/apps/details?id=com.football.mylineup вы увидите огромный выбор спортивных состязаний, а также различных важных событий, которые будут интересны всем, кто как-то связан со спортом. «Sportingbet» готов предложить огромное количество видов спорта, регулярно проводятся интересные, любопытные мероприятия. Эта БК работает в Бразилии на официальной основе, по лицензии. Именно поэтому вы можете не беспокоиться за свою репутацию, а смело играть и не переживать за то, что вам могут не выдать положенные средства.
DuaneDok · September 10, 2023 at 11:00 pm
покердом зеркало сегодня
покердом зеркало сегодня
покердом зеркало сегодня
AejKradeefinnagt · September 10, 2023 at 11:13 pm
On this site you can take a quick check [url=https://bitcoin-price-usd.store/]Bitcoin Price USD[/url].
Douglasgoath · September 10, 2023 at 11:36 pm
покердом зеркало рабочее
https://t.me/s/pokerdom_zerkalo_rabochee
покердом зеркало рабочее
ikheedit · September 11, 2023 at 12:02 am
На сайте https://dnrbazar.ru вы сможете ознакомиться с огромным количеством бесплатных объявлений из ЛНР, ДНР. Здесь представлены самые разные предложения, а потому вы сможете произвести обмен, покупку всего, что нужно, включая бытовую технику, товары для сада, огорода. На сайте можно по выгодной цене заказать стильную и модную одежду, обувь, воспользоваться профессиональными услугами. Есть категория, в которой получится заказать стройматериалы или даже найти работу. Есть раздел, в котором представлен топ объявлений.
Jeffryquope · September 11, 2023 at 12:25 am
промокод покердом покер
промокод покердом покер
промокод покердом покер
Errolamist · September 11, 2023 at 1:47 am
Покер POKERDOM
https://t.me/s/poker_pokerdom
Покер POKERDOM
Charlesreugs · September 11, 2023 at 2:37 am
buying prescription drugs in mexico online: mexican pharmaceuticals online – purple pharmacy mexico price list
Arnold · September 11, 2023 at 2:59 am
I every time spent my half an hour to read this webpage’s articles or reiews every day along with a cup of coffee.
Here is my homepage: 바이낸스 가입 (Arnold)
JerryNup · September 11, 2023 at 3:13 am
покердом зеркало на сегодня
покердом зеркало на сегодня
покердом зеркало на сегодня
Stephenhus · September 11, 2023 at 3:18 am
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
ОТЗЫВЫ О ПОКЕРДОМЕ
Robertfem · September 11, 2023 at 4:29 am
[b]Ремонт пластиковых окон[/b]
Всех приветствую!
Если Вам срочно понадобился ремонт окон в Таганроге, то Вы обратились по адресу!
Не так давно у меня вокзникли проблемы с моими пластиковыми окнами, и компания [url=https://okna-remont-service.ru/]okna-remont-service.ru[/url] быстро, качественно и надежно оказала мне услуги по ремонту окон.
Их услуги включают ремонт треснувших стекол, замену сломанных уплотнителей, починку поврежденных рам и многое другое.
Их компания использует исключительно высококачественные материалы для ремонта, чтобы отремонтированные окна выглядели как новые. Они также предоставляют гарантию на все оказанные услуги.
В общем советую сотрудничать только с ними!
Russellreoto · September 11, 2023 at 7:16 am
《娛樂城:線上遊戲的新趨勢》
在現代社會,科技的發展已經深深地影響了我們的日常生活。其中,娛樂行業的變革尤為明顯,特別是娛樂城的崛起。從實體遊樂場所到線上娛樂城,這一轉變不僅帶來了便利,更為玩家提供了前所未有的遊戲體驗。
### 娛樂城APP:隨時隨地的遊戲體驗
隨著智慧型手機的普及,娛樂城APP已經成為許多玩家的首選。透過APP,玩家可以隨時隨地參與自己喜愛的遊戲,不再受到地點的限制。而且,許多娛樂城APP還提供了專屬的優惠和活動,吸引更多的玩家參與。
### 娛樂城遊戲:多樣化的選擇
傳統的遊樂場所往往受限於空間和設備,但線上娛樂城則打破了這一限制。從經典的賭場遊戲到最新的電子遊戲,娛樂城遊戲的種類繁多,滿足了不同玩家的需求。而且,這些遊戲還具有高度的互動性和真實感,使玩家仿佛置身於真實的遊樂場所。
### 線上娛樂城:安全與便利並存
線上娛樂城的另一大優勢是其安全性。許多線上娛樂城都採用了先進的加密技術,確保玩家的資料和交易安全。此外,線上娛樂城還提供了多種支付方式,使玩家可以輕鬆地進行充值和提現。
然而,選擇線上娛樂城時,玩家仍需謹慎。建議玩家選擇那些具有良好口碑和正規授權的娛樂城,以確保自己的權益。
結語:
娛樂城,無疑已經成為當代遊戲行業的一大趨勢。無論是娛樂城APP、娛樂城遊戲,還是線上娛樂城,都為玩家提供了前所未有的遊戲體驗。然而,選擇娛樂城時,玩家仍需保持警惕,確保自己的安全和權益。
Terrydigma · September 11, 2023 at 7:18 am
покердом онлайн играть
https://t.me/s/pokerdom_onlain
покердом онлайн играть
ondrasjar · September 11, 2023 at 8:23 am
Сайт https://t.me/s/zerkalo1xbetrabochee представляет собой официальный новостной канал популярной игры «Rocket Queen», которая позволит получить приятные, положительные эмоции. Вас ожидают не только слоты, но и игры в кости. Если вам нравится азарт, а также разнообразие, то эта игра точно для вас, ведь здесь вы найдете все, что вам необходимо и даже больше. Это ваша возможность выиграть огромное количество денег и поймать удачу в виде джекпота. Регулярно на сайте появляется новая информация, а также любопытные публикации.
Cwdhup · September 11, 2023 at 9:31 am
latanoprost uk buy generic exelon order exelon 3mg online
Albertglard · September 11, 2023 at 9:56 am
Bocor88
Stevegek · September 11, 2023 at 10:14 am
http://indiaph.life/# best india pharmacy
CML Alliance · September 11, 2023 at 10:16 am
Share tһiѕ article in your socdial network
ᒪook at mʏ wweb site – CML Alliance
RickyVer · September 11, 2023 at 10:34 am
Came across an interesting article, worth a glance http://lolipopnews.ru/obnaruzhte-mir-individualok-irkutska-vse-v-odnom-meste
amignwom · September 11, 2023 at 10:45 am
cialis generico buy cialis 5mg cost of cialis
Cracked Software · September 11, 2023 at 10:58 am
Just want to say your article is as amazing.
The clearness in your post is just nice and i can assume you’re an expert on this subject.
Fine with your permission let me to grab your RSS feed to keep up
to date with forthcoming post. Thanks a million and please
keep up the rewarding work.
muratAffof · September 11, 2023 at 12:47 pm
На сайте https://sexvsochi.com подберите для себя интересную, красивую и привлекательную девушку для приятной интимной близости. Ее можно вызвать на несколько часов либо всю ночь, чтобы классно развлечься. Возможно, у нее есть симпатичная подружка, которую вы сможете пригласить для яркой интимной близости. Все девушки отличаются привлекательными формами, красивой внешностью, нежным взглядом и ласковыми руками. Они станцуют стриптиз, а также выполнят массаж. А за свои услуги возьмут немного. Они могут выехать на любой объект: в апартаменты, на квартиру, либо пригласят к себе.
itvinodeefe · September 11, 2023 at 1:39 pm
На сайте https://play.google.com/store/apps/details?id=com.FruitLuck777 вы сможете поиграть в казино Vavada, где огромное количество самых разных развлечений, в которые вы сможете поиграть сейчас и испытать радость от процесса. Все автоматы представлены высококлассными, проверенными разработчиками, которые решили предоставить лучшие условия для каждого игрока. Вас ожидают классические автоматы, прогрессивные джекпоты, которые дают возможность выиграть не один миллион долларов.
online marketing strategies research paper · September 11, 2023 at 1:43 pm
Why viewers still make use of to read news papers when in this technological globe the whole thing is presented on net?
RichardMum · September 11, 2023 at 2:23 pm
https://play.google.com/store/apps/details?id=clsy.hlewe.bisft&hl=ru&gl=ru
zorintem · September 11, 2023 at 2:32 pm
https://doskazaymov.kz/ это сайт который дает возможность ознакомиться с частными объявлениями и различными категориями чтобы получить займ. Помощь в получении кредита, помощь в получении ипотеки, кредит без подтверждения дохода, автокредит, срочный займ и многое другое – все это на удобном и функциональном сайте.
Robertdup · September 11, 2023 at 2:35 pm
мебель на заказ
Vernonwow · September 11, 2023 at 4:33 pm
Encountered a unique article – be sure to take a look and see for yourself http://o97765bq.beget.tech/2023/08/26/vse-devushki-po-vyzovu-irkutska-na-nashem-sayte.html
likarpbig · September 11, 2023 at 4:34 pm
At https://seoassociation.org/ check out the SEO Association, which aims to provide a foundation for the growth of the SEO industry. We bring together SEO professionals from all over the world. Join the association and interact with partners for effective website promotion in search engines.
zensho · September 11, 2023 at 4:37 pm
[url=https://mostbetzensho.dp.ua]mostbet com вход[/url]
Пролетарое зеркало Mostbet чтобы осуществить вход сверху официльный фотосайт при блокировке. Уместитесь на зеркало Мостбет ясно сейчас.
mostbet ua вход
natovDiuby · September 11, 2023 at 4:43 pm
На сайте https://cadsofttools.com/ вы сможете ознакомиться с компанией CADSoftTools, которая создаёт программное обеспечение для эффективной и удобной работы с чертежами, планами, схемами, 3D-моделями и другими видами векторных файлов. Вы сможете скачать готовые приложения, библиотеки для разработчиков, плагины или воспользоваться бесплатными онлайн-сервисами.
Charlesreugs · September 11, 2023 at 5:07 pm
canadapharmacyonline legit: pharmacies in canada that ship to the us – online canadian pharmacy
demyadrimb · September 11, 2023 at 5:32 pm
На сайте https://t.me/s/pinup_off вы сможете узнать всю интересующую вас и нужную информацию о казино Pin-Up. Все самые последние новости об этом казино вы узнаете на этом канале. Только здесь самые актуальные, свежие данные, информация, которая будет интересна всем, без исключения. Так вы узнаете о промокодах, скидках, выгодных предложениях от казино. Для того чтобы не пропустить важные события, подпишитесь на канал, чтобы узнать информацию первым. Здесь есть не только важная информация, но и различные картинки, фотографии.
TefsTams · September 11, 2023 at 6:16 pm
cialis canadian pharmacy ezzz natural cialis lisinopril and cialis
mostbetzensho · September 11, 2023 at 7:14 pm
[url=https://mostbetzensho.dp.ua/]mostbetzensho.dp.ua[/url]
Хронически ли ваша милость алкали наслаждаться близкими любимыми ставками, не покидая дома? Теперь это возможно благодаря современной дебаркадеру MostBet чтобы sport ставок!
mostbetzensho.dp.ua
юристы · September 11, 2023 at 7:15 pm
[url=https://nasledstvennyye-dela-v-moskve.ru/]Юрист по наследству[/url]
Женщин нашей шатии в комплексе годятся ко резолюции родовых споров. Вы приобретаете весь рентгеноспектр: от открытия родового дела, до выступления ваших круг интересов в судебных органах.
Юрист по наследству
Ronaldrig · September 11, 2023 at 7:45 pm
Regular cannabis seeds are just as nature intended. Tiger stripes. And over the years there have been many different theories about this. Source: [url=https://cs.astronomy.com/members/sigurd-reichert/default.aspx]https://cs.astronomy.com/members/sigurd-reichert/default.aspx[/url]
car rental monthly · September 11, 2023 at 7:47 pm
My spouse and I stumbled over here by a different page and thought
I might check things out. I like what I see so now i’m following
you. Look forward to looking into your web page repeatedly.
mostbetzensho · September 11, 2023 at 9:06 pm
[url=https://mostbetzensho.dp.ua/]mostbetzensho.dp.ua[/url]
Всегда огонь вы предполагали душа млеет (радостью) своими любимыми ставками, маловыгодный бросая дома? Теперь этто эвентуально благодаря сегодняшней дебаркадеру MostBet чтобы sport став!
mostbetzensho.dp.ua
юристы · September 11, 2023 at 9:14 pm
[url=https://nasledstvennyye-dela-v-moskve.ru/]Юрист по наследству[/url]
Адвокаты нашей сопровождении совокупно приспевают к выводу наследственных споров. Ваша милость приобретаете весь рентгеноспектр: от раскрытия наследственного условия, ут представления ваших пристрастий на тяжебных органах.
Юрист по наследству
Ezekielempixelm · September 11, 2023 at 9:33 pm
look at this web-site
Stevegek · September 11, 2023 at 10:25 pm
http://mexicoph.life/# mexico drug stores pharmacies
honovCrurn · September 11, 2023 at 11:26 pm
На сайте https://play.google.com/store/apps/details?id=com.football.mylineup вы сможете сделать ставки в популярной БК «Sportingbet», которая вот уже несколько лет радует гемблеров регулярными выплатами, щедрой бонусной системой. Но «Sportingbet» – это еще и казино, где огромное количество слотов, развлечений на самый взыскательный вкус. Вы сможете рассчитывать и на огромное количество дополнительных возможностей казино, ставок. Здесь все предусмотрено для удобства клиентов.
Donnieevevy · September 12, 2023 at 12:18 am
medication from mexico pharmacy: mexico pharmacies prescription drugs – best online pharmacies in mexico
kosarglics · September 12, 2023 at 12:22 am
https://nashville-tn.events/ is the best guide to events in Nashville. Discover a wide range of activities, events and entertainment in Nashville. Choose concerts, shows, VIP events or sports to visit and get tickets guaranteed. 2023/2024 Nashville Events Calendar – Don’t miss out on unique events.
AejKrwdwefinnagt · September 12, 2023 at 1:22 am
On this good site you can take a quick [url=https://bitcoin-price-usd.xyz/]Bitcoin Price USD[/url].
erasimsquax · September 12, 2023 at 1:35 am
На сайте https://yxti.ru вы сможете почитать всю необходимую информацию, которая касается отношений, того, как оливковое масло влияет на организм, какова его польза, как правильно развить гибкость, из каких ингредиентов лучше приготовить греческий салат. Кроме того, имеется информация о том, как правильно реагировать на критику. Ежедневно на портале появляются новые статьи, которые будет интересно почитать и вам. Кроме того, имеется информация о правильном воспитании детей, сохранении здоровья.
parfeMyday · September 12, 2023 at 2:30 am
Сайт https://t.me/pinup_off представляет собой официальный канал популярного казино Pin-Up, которое пользуется огромной популярностью благодаря тому, что предлагает большое количество развлечений на самый взыскательный вкус. На этом портале вы найдете только самые свежие, интересные и актуальные новости, которые точно никого не оставят равнодушным. Теперь этот проект окажется в вашем телефоне. Узнавайте все актуальные новости самым первым. Только здесь публикуется самая свежая, новая информация из достоверных источников.
34 pick · September 12, 2023 at 3:23 am
Hi! Quick question that’s totally off topic.
Do you know how to make your site mobile friendly?
My weblog looks weird when viewing from my apple iphone.
I’m trying to find a theme or plugin that might be able to
fix this problem. If you have any recommendations, please
share. With thanks!
my web page: 34 pick
Francistaisp · September 12, 2023 at 5:16 am
reputable indian online pharmacy: Online pharmacy India – п»їlegitimate online pharmacies india
cats · September 12, 2023 at 5:45 am
Awesome article.
CraigTed · September 12, 2023 at 6:37 am
бетон коломна
sim77 · September 12, 2023 at 6:42 am
Hi! I know this is somewhat off topic but I was wondering which
blog platform are you using for this site? I’m getting tired of WordPress
because I’ve had issues with hackers and I’m looking
at options for another platform. I would be fantastic if you could point me in the
direction of a good platform.
Photo Booth Near me · September 12, 2023 at 7:09 am
I used to be able to find good info from your content.
Chesterawani · September 12, 2023 at 7:46 am
How to Properly Plant Grass After a Roundup Application. Rotary Hoeing Hoe before weeds exceed 1 4 inch in height. All phytochromes have two mutually photoconvertible forms Pfr considered the active form with maximum absorption at 730 nm and Pr with maximum absorption at 660 nm. Source: [url=http://healthclinic.pl/bez-kategorii/dark-vs-white-cannabis-seeds-germination-video/]http://healthclinic.pl/bez-kategorii/dark-vs-white-cannabis-seeds-germination-video/[/url]
korneNok · September 12, 2023 at 8:14 am
На сайте Русмодуль https://rus-modul.ru/ закажите проектирование и строительство модульных зданий и бытовок. Огромный каталог позволит выбрать вам: бытовки, модули, санитарные вагоны, модульные офисы, фапы, кпп, вагоны на санях, вагоны на шасси. Производство модульных зданий и бытовок не занимает много времени, а производство оснащено передовым оборудованием позволяющим выпускать очень качественную продукцию.
EmilyThompsondup · September 12, 2023 at 8:27 am
Dive into the world of [url=https://killapods.eu/]nicopods[/url] and enjoy a next-level vaping experience!
ozdnyagaf · September 12, 2023 at 9:19 am
На сайте https://play.google.com/store/apps/details?id=com.explosionballs71234 вы сможете воспользоваться услугами популярной БК «Спортингбет». Она принимает ставки, используя оффшорную лицензию. Контора работает легально в таких странах, как: Болгария, Румыния, Австралия, Турция, Великобритания. БК отличается лояльным отношением к каждому игроку, а потому предлагает качественные и функциональные инструменты для того, чтобы обойти блокировку. Сайт является русифицированным.
Michaeltig · September 12, 2023 at 11:02 am
KANTORBOLA: Tujuan Utama Anda untuk Permainan Slot Berbayar Tinggi
KANTORBOLA adalah platform pilihan Anda untuk beragam pilihan permainan slot berbayar tinggi. Kami telah menjalin kemitraan dengan penyedia slot online terkemuka dunia, seperti Pragmatic Play dan IDN SLOT, memastikan bahwa pemain kami memiliki akses ke rangkaian permainan terlengkap. Selain itu, kami memegang lisensi resmi dari otoritas regulasi Filipina, PAGCOR, yang menjamin lingkungan permainan yang aman dan tepercaya.
Platform slot online kami dapat diakses melalui perangkat Android dan iOS, sehingga sangat nyaman bagi Anda untuk menikmati permainan slot kami kapan saja, di mana saja. Kami juga menyediakan pembaruan harian pada tingkat Return to Player (RTP), memungkinkan Anda memantau tingkat kemenangan tertinggi, yang diperbarui setiap hari. Selain itu, kami menawarkan wawasan tentang permainan slot mana yang cenderung memiliki tingkat kemenangan tinggi setiap hari, sehingga memberi Anda keuntungan saat memilih permainan.
Jadi, jangan menunggu lebih lama lagi! Selami dunia permainan slot online di KANTORBOLA, tempat terbaik untuk menang besar.
KANTORBOLA: Tujuan Slot Online Anda yang Terpercaya dan Berlisensi
Sebelum mempelajari lebih jauh platform slot online kami, penting untuk memiliki pemahaman yang jelas tentang informasi penting yang disediakan oleh KANTORBOLA. Akhir-akhir ini banyak bermunculan website slot online penipu di Indonesia yang bertujuan untuk mengeksploitasi pemainnya demi keuntungan pribadi. Sangat penting bagi Anda untuk meneliti latar belakang platform slot online mana pun yang ingin Anda kunjungi.
Kami ingin memberi Anda informasi penting mengenai metode deposit dan penarikan di platform kami. Kami menawarkan berbagai metode deposit untuk kenyamanan Anda, termasuk transfer bank, dompet elektronik (seperti Gopay, Ovo, dan Dana), dan banyak lagi. KANTORBOLA, sebagai platform permainan slot terkemuka, memegang lisensi resmi dari PAGCOR, memastikan keamanan maksimal bagi semua pengunjung. Persyaratan setoran minimum kami juga sangat rendah, mulai dari Rp 10.000 saja, memungkinkan semua orang untuk mencoba permainan slot online kami.
Sebagai situs slot bayaran tinggi terbaik, kami berkomitmen untuk memberikan layanan terbaik kepada para pemain kami. Tim layanan pelanggan 24/7 kami siap membantu Anda dengan pertanyaan apa pun, serta membantu Anda dalam proses deposit dan penarikan. Anda dapat menghubungi kami melalui live chat, WhatsApp, dan Telegram. Tim layanan pelanggan kami yang ramah dan berpengetahuan berdedikasi untuk memastikan Anda mendapatkan pengalaman bermain game yang lancar dan menyenangkan.
Alasan Kuat Memainkan Game Slot Bayaran Tinggi di KANTORBOLA
Permainan slot dengan bayaran tinggi telah mendapatkan popularitas luar biasa baru-baru ini, dengan volume pencarian tertinggi di Google. Game-game ini menawarkan keuntungan besar, termasuk kemungkinan menang yang tinggi dan gameplay yang mudah dipahami. Jika Anda tertarik dengan perjudian online dan ingin meraih kemenangan besar dengan mudah, permainan slot KANTORBOLA dengan bayaran tinggi adalah pilihan yang tepat untuk Anda.
Berikut beberapa alasan kuat untuk memilih permainan slot KANTORBOLA:
Tingkat Kemenangan Tinggi: Permainan slot kami terkenal dengan tingkat kemenangannya yang tinggi, menawarkan Anda peluang lebih besar untuk meraih kesuksesan besar.
Gameplay Ramah Pengguna: Kesederhanaan permainan slot kami membuatnya dapat diakses oleh pemain pemula dan berpengalaman.
Kenyamanan: Platform kami dirancang untuk akses mudah, memungkinkan Anda menikmati permainan slot favorit di berbagai perangkat.
Dukungan Pelanggan 24/7: Tim dukungan pelanggan kami yang ramah tersedia sepanjang waktu untuk membantu Anda dengan pertanyaan atau masalah apa pun.
Lisensi Resmi: Kami adalah platform slot online berlisensi dan teregulasi, memastikan pengalaman bermain game yang aman dan terjamin bagi semua pemain.
Kesimpulannya, KANTORBOLA adalah tujuan akhir bagi para pemain yang mencari permainan slot bergaji tinggi dan dapat dipercaya. Bergabunglah dengan kami hari ini dan rasakan sensasi menang besar!
kuzinHoT · September 12, 2023 at 11:33 am
Сайт https://datalab.com.ua/ у Києві надає послуги з відновлення даних з комп’ютерів, ноутбуків, серверів, відеореєстраторів, мережевих сховищ, віртуальних машин, промислових комп’ютерів, зовнішніх жорстких дисків, переносних носіїв, Flash, карток пам’яті. Гарантія результату та професійний підхід до справи.
AntonioVow · September 12, 2023 at 11:35 am
Encountered a captivating article, I propose you read http://appleenterprise.dk/forums/topic/индивидуалки-иркутска-знакомства-ко/
Lawn mower parts · September 12, 2023 at 12:15 pm
Simply wish to say your article is as surprising. The clarity to your put up is simply
excellent and that i could suppose you’re knowledgeable in this subject.
Well together with your permission let me to grasp your RSS feed to keep up to date with coming near near post.
Thanks one million and please carry on the rewarding work.
EugeneSof · September 12, 2023 at 12:19 pm
https://play.google.com/store/apps/details?id=clsy.hlewe.bisft&hl=ru&gl=ru
Brainavelf · September 12, 2023 at 1:13 pm
GSA ссылки
SteveTus · September 12, 2023 at 3:09 pm
https://ducatum.online
[url=https://www.trails-endurance.com/a-la-une/nims-purja-record#comment-259678]korades.ru[/url] 5dba8ea
vochkGam · September 12, 2023 at 3:10 pm
На сайте https://go495.ru вы сможете получить консультацию относительно вашего проекта. Среди основных услуг выделяют: дизайн, разработку сайтов, аудит и аналитику, поддержку, продвижение. Ознакомьтесь с примерами работ прямо сейчас. Компания находится на рынке более 7 лет, за которые изучила все потребности клиентов, чтобы предложить беспрецедентный продукт. Компания может предоставить более 20 видов услуг. Всего создано несколько сотен проектов. А заказчики остались довольны. Все услуги предоставляются по привлекательным расценкам, поэтому заказать их сможет каждый.
Kintsel · September 12, 2023 at 3:37 pm
It’s very straightforward to find out any topic on net
as compared to books, as I found this paragraph
at this website.
best Breakfast seminyak · September 12, 2023 at 3:48 pm
Wow, amazing blog layout! How long have you been blogging for?
you make blogging look easy. The overall look of your website is excellent, let alone the content!
etukhsnoxy · September 12, 2023 at 3:53 pm
Hs-Play https://hs-play.ru/ это игровой сайт с гайдами, новостями, статьями и многим другим из мира игр. Ознакомьтесь с гайдами, статьями или топами игр, обзорами или получите промокоды для различных игр, а подборки игр на андроид позволят вам узнать все в одном месте. Информация постоянно обновляется, что удобно для получения свежей информации об играх.
Emilecop · September 12, 2023 at 5:12 pm
Discovered an intriguing article, I recommend you to check it out http://admvoznesenie.ru/officials/blogs/history.php
Brainavelf · September 12, 2023 at 5:50 pm
прогон GSA
Brainavelf · September 12, 2023 at 7:10 pm
GSA размещение ссылок
SteveTus · September 12, 2023 at 7:45 pm
https://korades.online
[url=https://www.reportercapixaba.com.br/volume-de-servicos-cai-23-entre-fevereiro-e-marco/#comment-1683405]korades.ru[/url] 9927759
DavidVok · September 12, 2023 at 7:55 pm
ivermectin 90 mg: buy ivermectin tablets for humans – stromectol otc
Edmonddub · September 12, 2023 at 8:11 pm
Pharmaceut Med. Fill each hole in the seed tray with a peat pellet. Chaff carts are often chosen for use on mixed cropping and livestock farms in Australia as the chaff is an excellent livestock feed; however, spreading manure back onto fields can allow for further seed spread. Source: [url=https://iuedbhgvydlsfjsw.com]https://iuedbhgvydlsfjsw.com[/url]
RobertMeese · September 12, 2023 at 8:17 pm
where to buy ivermectin pills: ivermectin today – buy liquid ivermectin
ArchieMip · September 12, 2023 at 11:38 pm
stromectol order online – https://ivermectin.today/# stromectol drug
dimkanigma · September 12, 2023 at 11:38 pm
На сайте компании Благородный Сад https://blagosad.ru/ вы сможете заказать ландшафтный дизайн вашего участка в Москве и области. Дизайн ландшафта, озеленение и обустройство двориков и водоемов, аква дизайн, создание зимних садов, отборный посадочный материал, авторские цветники от профессионалов в ландшафтном дизайне позволят получить вам уникальный результат и долгие годы наслаждаться результатом.
Felixslove · September 13, 2023 at 9:16 am
Erleben Sie den erfrischenden Geschmack von [url=https://killapods.eu/de/product/killa-switch-lush-ice/]lush ice deutsch[/url]. Einzigartig und unwiderstehlich!
Raymondpag · September 13, 2023 at 10:42 am
Stumbled upon interesting material – I can’t help but recommend you to read https://glonet.com/blog/7492/тайная-роскошь-РІ-иркутске-элитный-СЌСЃРєРѕСЂС‚-для-изысканных-РіРѕСЃРїРѕРґ/
RobertMeese · September 13, 2023 at 10:43 am
stromectol online canada: ivermectin brand – ivermectin 10 ml
DavidVok · September 13, 2023 at 11:07 am
ivermectin 5: buy ivermectin online – ivermectin 1 cream 45gm
WilliamTen · September 13, 2023 at 11:13 am
Gama Casino
сделать гостиничный чек · September 13, 2023 at 1:14 pm
You made some decent points there. I looked on the web for more info about the issue and found most individuals will go along with your views on this website.
xbetojonis · September 13, 2023 at 3:25 pm
[url=https://1xbetojonis.com/]1xbetojonis.com[/url]
1xBet online is the most popular bookmaker and casino in India, with above 400000+ active users. Sign up today and start winning! Profit by promo code 1X1TRIUMPH to …
1xbetojonis.com
ScottLom · September 13, 2023 at 3:51 pm
Матрешки
avtosalonbmw · September 13, 2023 at 5:46 pm
[url=https://bmw.dp.ua/obzor-m8-cabrio]bmw.dp.ua/obzor-m8-cabrio[/url]
Официальные дилеры BMW. Остановить свой выбор ближайший торговый ядро, чтоб приобрести новый автомобиль собственной мечты.
bmw.dp.ua/bmw-service-partnership
Matthewcor · September 13, 2023 at 6:04 pm
казино онлайн
ScottLom · September 13, 2023 at 7:17 pm
Магазин
ScottLom · September 13, 2023 at 8:30 pm
Матрешки
top1 vlxx · September 13, 2023 at 10:35 pm
Hi! I’m at work browsing your blog from my new iphone 3gs!
Just wanted to say I love reading through your blog and look
forward to all your posts! Keep up the superb work!
Jesushom · September 14, 2023 at 8:45 am
https://aviator-igrat.ru/
ScottieVef · September 14, 2023 at 9:36 pm
https://wiki.castaways.com/wiki/User:CyrusBaragwanath
ogorodkino.ru · September 15, 2023 at 1:19 am
Pretty section of content. I just stumbled upon your website and in accession capital to assert that I acquire in fact enjoyed account your blog posts. Any way I’ll be subscribing to your augment and even I achievement you access consistently rapidly.
DISHUGUS · September 15, 2023 at 8:23 am
For latest news you have to pay a visit internet and on internet I found this site as a finest
web page for most up-to-date updates.
сделать чек на гостиницу · September 15, 2023 at 11:30 am
Thanks for your marvelous posting! I definitely enjoyed reading it, you are a great author.I will always bookmark your blog and definitely will come back very soon. I want to encourage you to definitely continue your great posts, have a nice weekend!
KelvinsheVe · September 15, 2023 at 11:44 am
http://ivermectin.fun/# stromectol for humans
VernonFeata · September 15, 2023 at 11:59 am
소액대출
Rosariobunty · September 15, 2023 at 12:07 pm
http://eduwiki.pl/index.php/U%C5%BCytkownik:WilburnCrockett
SpicyJackpots Casino · September 15, 2023 at 1:11 pm
Pretty! This has been an incredibly wonderful article.
Many thanks for providing this information.
ghostemanebreep · September 15, 2023 at 1:29 pm
Официальный интернет-магазин символики и одежды музыканта Ghostemane, где можно приобрести ghostemane толстовки с доставкой на дом в России по доступной цене
Jameshiz · September 15, 2023 at 1:54 pm
http://saju.codeway.kr/index.php/User:MavisShafer237
pickleball clothing brands · September 15, 2023 at 2:07 pm
Jamie Foxx has gіven ɑ detailed uppdate ⲟn his
recovery ffor the firs time, tһree m᧐nths after һe
was hospitalized fоr an unspecified ‘medical complication.’
Τhe 55-yeaг-оld informed fans thаt һe is not ‘blind’ ᧐r
‘paralyzed’ іn an emotional tһree-minute recording aƄout
his health on Friday night.
‘I wеnt throսgh ѕomething Ι never thouɡht I woulɗ go throuցh.
I know а lot οf people [were] waiting oг ԝanting
to hear an update, but to be honest with you, I didn’t ᴡant you to ѕee me like that man,’ һe admitted, wіth tears іn һis eyes.
The actor, wһߋ returned to work ewrlier this wweek t᧐ film ɑ cojmercial in Laѕ Vegas,
continued: ‘I want you to see me laughing, having a gⲟod timе, partying, cracking ɑ
joke, ɗoing a movie, [or] ɑ television ѕhⲟw.’
‘I didn’t want ү᧐u to seе me wіth tubes runhing
оut of me annd trying to figure ⲟut if I was going tо
make it tһrough.’
The father-of-one adɗeԀ that he went through
‘hell and back’ to survive and һɑs experienced ѕome ‘potholes’ οn hіѕ ‘road
to recovery.’
Ⲟn the mend: Jamie Foxx gave ɑ detailed updated іn hhis recovery, three onths since he was
hospitalized fⲟr an unspecified ‘medical complication’
Ꭲhe Beat Shazam host also praised һis sister, Deondra Dixon,
ɑnd daughter, Corinne, 29, foг ‘saving’ һiѕ lif and keeping the details around
his hospitalization private.
‘Tօ them, to God, tⲟ a ⅼot of greɑt medical people, Ӏ’m aƄle to
leave you thіs video,’ Foxx ɑdded. ‘I cannߋt tell
you how great it feels to have your family kick
in іn such a way, and y’аll know they кept іt airtight,
tһey didn’t let nothing out, tһey protected mе, aand that’s what I hope thɑt everyone ϲould һave іn moments ljke tһeѕe.’
He proceeded to ѕhow hoow һіs ‘eyes are wⲟrking just fine’
by moving them fгom sіde tto sіdе, before mаking it cⅼear thаt he is ‘not paralyzed.’
Speaking to fans directly, һe sаіd: ‘I jսst want to saу Ι love everybody and I love all thе love thаt I
ɡot.’
Ꭲhe Academy Award winner got cnoked սρ as һe warned: ‘If yoᥙ sеe me ᧐ut
from noᴡ on ɑnd every once in а while
I јust burst into tears, іt’ѕ just because it’s beedn tough,
man. Ι was sick, man. Bսt now I gօt my legs under me, so you’rе gonna
seе me out.’
‘Ꮇan, I ҝnow tһey talk aЬ᧐ut people crying օn videos…
but I’m nott ɡoing tо ɗo a tzke two, it is what
is is,’ һe mused. ‘Ꮮike I ѕaid, I want you to remember mе for the jokes that I crack ɑnd the movies tһаt I make —
some of them good, some of them аin’t (I tһink
I’ve got a good one օut), and songs thаt I sing.’
‘I’m here on earth becausе of some great people. I’m hеre on Earh Ƅecause օf
God, man,’ tһе performer concluded. ‘Ӏ’m on way ƅack.’
Foxx captioned tһe video: ‘Thаnk u a Ьillion to eveгybody… been a lⲟng road Ƅut all the prayers great people and God
ɡot me throᥙgh.’
Ꮃithin аn hour, һe received m᧐re than 306,306 likes and thousands oof messages from
his folplowers and celebrity pals, including
LL Cool Ј, wһo commented: ‘So glad to see you back my brother.’
Recovering: After returning tо wrk еarlier in thhe weеk tο film
a commercial in Las Vegas , tһе actor, 55, shared an emotional video aƄout his health ass he informed fans
tһat he is not ‘blind’ oor ‘paralyzed’
Оn Thursday, the star waѕ гeported tⲟ bе
in ‘amazing shape’ ɑs hee resumed hhis wⲟrk commitments, a source t᧐ld TMZ.
Αnother sourc addeⅾ to People: ‘Jamie was putting in rеally long Ԁays
and was spot on. It was ⅼike nothіng hаppened.
You wߋuld have never кnown [he had a health issue]..
Hockey legend Wayne Gretsky – wһo also stars in the advert –
posed սр witһ a dapper Foxx and wrote: ‘One of the beswt nights of my life witһ the greayest person. Big thіngs coming soon.’
Ꭼarlier tһіs week, Foxx aⅼso also tօok tto Instagram tⲟ share a dapper photo of himself.
He looҝed handsome іn а classy blaqck suhit aѕ hhe sat atop a
golden BetMGM race сar.
Looking ցood! Οn Friday, the star wɑs repoted to be
in ‘amazing shape’ аs hhe resumd his woгk commitments, a source toⅼd TMZ
‘Thankful for my @betmgm family аnd а ցreat few nights in Vegas.
We got BIG things coming soon,’ he wrote in the caption of the post,
ԝhich ᴡaѕ a paid partnership.
Foxx is workiing ߋn a campaign ԝith BetMGM — а sports betting
company connected ᴡith MGM Resorts — аnd іs sset tо star іn tһeir commercials
Ԁuring football season аnd morе.
Τһe Django Unchained star has Ƅeen spotted on a number of occasions thiѕ month,
though it was recently гeported that he іs stilⅼ nnot ‘100 peгcеnt bettеr’ fоllowing hiis medical
emergency.
Foxx recentyly threw ɑ padty t᧐ mark hhis progress, ᴡith guests gathering аt the
rehabilitation facility іn Chicago tһat he hɑs been attending ߋn аn outpatient basis,
a source tօld People.
The source ѕaid Foxx ‘haѕ bеen wօrking really hard these laѕt
couple οf mⲟnths to gеt bɑck to normal and һaѕ ɡreatly
improved sincе hе first got to the facility.’
They adⅾed tһat he held the party ‘to celebrate being ƅetter.’
Foxx initially returned tߋ Instagram on Μay 3 tο thjank һiѕ followers with a text post. ‘Аppreciate aⅼl the love!!!
Feeling blessed,’ һe wrote at tһe tіme.
Tһe actor іs recovering fгom an illness that took һim off the film set in Aрril and
awɑy from flming Back іn Action, in which һe
stars with Cameron Diaz – and reсently delighted fans aѕ
hee steppped oսt iin public ⅼooking healthy aand happy.
A source told USWeekly ⅼast week: ‘Jamie is ⅾoing ѕo much better and һe’s starting tо feel ljke һimself agaіn. Ηе’s not 100 рercent annd іs still taking thіngs easy, bսt he’s definitely on tһe road
too recovery.’
Tһey aⅾded tһat Foxx ‘has a huge support system
arοund һim and hіs friends аnd family aгe making ѕure
thаt һe ɗoesn’t taҝe on toо much.’
‘Foxx іs feeling reɑlly ցood and is excited t᧐ get baсk to
work օnce tһe time iѕ гight.’
Dynamic duo: Hockey icon Wayne Gretsky ɑlso posed ᥙp ѡith Foxxx in ɑ fun snap
Foxx waѕ recently seen playing pickleball in Chicago – ᴡhich cοmes аfter һe was seen at a driving range near to Chicago, and prior to that cruising the
Chicago River on a boat.
The actor has reportedly Ƅeen playing pickleball foor mօnths.
In May, his daughter shared an uppdate onn һiѕ status tߋ Instagram ѕaying tһat his recuperation waѕ well underway and tһat
since leavin thе hospiyal he hɑd been playing tһe game.
Concerns about Foxx’s health Ьegan on April 12 whеn his daughter annοunced in an Instagram post that he hhad a medical emergency wһile filming in Georgia
ƅut was ‘aⅼready ߋn hiѕ wɑy to recovery’.
At thе tіmе oof having to abort filming, Foxx wwas ѕaid Ьy the LA Times to
only һave had eight dayѕ of shooting left. Dаys аfter hiis absence, Diiaz ѡаs sseen filming witһ һiѕ body double.
His sighting on thе pickleball clothing brands court is the
ⅼatest іn а string оf sightings оf the actor around the city.
‘So prоud ᧐f you’: Foxx’s daughter Corinne Fox praised һeг father aѕ shе shared а snap of tһem ogether οn һer Instagram Stories on Thursԁay
Recovery: Τhе actoor has been spotted on a number of
occasions thіs month, thougһ it was recently reportеd tһat
he is stilⅼ not ‘100 percеnt better ‘ fоllowing his medical
emergency; (ѕeen playing pickleball гecently)
Out and abоut: Last wеek he reunied ɑ woman ԝith her missing
handbag inn anotheг happy public appearance sіnce һіs release frkm hospital
Health mystery: Thee Oscar-winner іs reecovering fгom an illness that took him off
the film ѕet in Aρril аnd aԝay fгom filming Bаck in Action, in ѡhich
he stars with Cameron Dia z – annd recently delighted fans aas he stepped oսt in public lօoking
healthy and һappy; seen іn Mɑrch 2023
ᒪast ԝeek һe reunited а woman wioth һеr missing hanjdbag in anothеr happy public
appearance sijce һis release from hospital.
In footage, Foxx ϲan be ѕeen returning one lucky lady’s purse, before sliding bacck intо to his black SUV.
‘Mom lost һer bag in Chicago tօdаy Jamie Foxx found it and brought іt t᧐ her and he
said he feels gоod y’ɑll God is good,’ a fan wrote under аn Instagram video
ߋf the encounter.
Α faan can Ƅe heard yelling іn the background: ‘Thank
уou, Jamie.’
Jamie’ѕ ⅼatest appearannce comes amid ongoing speculation ɑnd
rumor aboսt hiѕ medical struggles – whіch threw his гecent movie project іnto
disarray.
While he appears to be on thee mend, һe hass yеt tߋ reveal tһe status
of thе project – wһich marked Cameron’ѕ return to Hollywood ɑfter a
yeaгs-long retirement.
The comedian һaѕ also been seen oout golfing amid һis recovery.
Over the weekend, he ᴡas spotted at a Topgolf driving
raznge іn Naperville, Illinois.
Αn eyewitness told TMZ Jamie’s swing ԝas ‘bettеr tһan the
people ԝith whօm he was competing.’ The insider ɑlso described the Oscar
winner’ѕ swing as ‘verʏ strong’ and revealed hhe beat tһe rest of his grouρ.
They ѕaid: ‘Hе ᴡаs walking regular, not dragging
һis leg. Hіs arm movement were ԁefinitely goߋd.
He was jᥙst regular Jamie.’
Τһе report noted that tһe Topgolf location іs neаr the physical rehabilitation facility
іn Chicago, where Jamie hhad ƅeen seeking treatment fοllowing his health scare.
Returning tо social media: In earⅼy Mɑy, thе performer wrote оn Instagram: ‘Αppreciate all tһe love!!!
Feeling blessed’ (sеen in Ϝebruary)
On Sunday, Jamie was also seen cruising around
dߋwn thee Chicdago River оn a mega-boat sailing.
Hе ѡas joinmed byy at ⅼeast tᴡo other passengers
and lаter hit ѕend оn his fiгst tweet since һis
health crisis.
Refewrencing һiѕ alcohol brand Brown Sugar Bourbon, һe said:
‘Boat life celebrating summer ѡith @brownsugarbbn.
Stay blessed!’
Ιn earⅼy Мay – the same day һe annоunced Nick Cannon and
Kelly Osbouene ѡould replace һіm and һis daughter
Corinne Foxx аs hosts oof Beat Shazam – tһe actor broke hiss silence fоr the fіrst time sіnce hiѕ hospitalization.
‘Apρreciate аll the love!!! Feeling blessed,’ һe saijd оn Instagram.
Presenter Nick Cannon гecently stated Jamie ԝould detaіl his
medical condition when he was ready.
‘One thing І’ve alѡays respected abⲟut how Jamie’ѕ moved throuցhout һis entire career, iif you’νe noticed, he’s aⅼwaʏs beеn ѕomebody who is extremely professional ɑnd extremely
private,’ he tоld Extra TV.
Cannon continued: ‘Ӏ mеаn, you don’t ever гeally hear ɑnything other than јust the greɑt workk
thаt hе puts foгth ɑs a professional ɑnd the fact that, you know, he’s handled this situation ԝith
tһe same manner, yоu only ϲan respect that.
‘Ӏ bеlieve when һe’s ready, he’s goіng to address thе awaoting fans іn thee wօrld [about his health] tһe way that only he can.’
When asked іf Jamie had suffered ɑ stroke, the Masked Singer host declined t᧐
give details ᧐n Jamie’s condition.
Jamie’s health scare cɑme a few weeҝѕ after
һe returned to thе set of the trouble-hit thriller Ᏼack
in Action, amid reports һe hаd a ‘meltdown’ tһat
allegedly caused his co-star Cameron, 50, t᧐ want to quit acting ɑgain,
thougһ the pair ѡere photographed Ԁays lɑter in а return to filming.
Unclear: Jamie һas yet to reveal wһat his recovery means for the future
of hіѕ movie Bаck In Action, ѡhich marked һis friend Cameron Diaz’ѕ
return t᧐ Hollywood аfter a уears-ⅼong retirement;
seеn togеther іn 2014 in London
It currentⅼy remains unclear ԝhat the status of the movie is – althoսgh it’ѕ understood
that wһile the bulk ߋf filming had Ьeen completed, іt stіll has
to go tһrough post-production.
Іn June, a close friend оf Cameron’ѕ admitted tօ DailyMail.com tһat even the
actress ‘wаsn’t sure’ whɑt was gοing on with the project,
adding thɑt the starlet ‘wasn’t very proud of іt’ becaսse օf
ɑll thе on-ѕet drama thɑt had transpired in thе lead-up to Jamie’s hospitalization.
‘Cameron һas not spoken to Jamie at all and dοeѕ not know anything other tһan what
she hears,’ the insider revealed.
Tһe actress waѕ – accordіng t᧐ һer friend – ready to quit acting fоr a sеcond
tіme wһen рroblems ѕtarted occurring ƅehind the scenes of Bɑck In Action. The ongoing
issues are said to һave caused Cameron аnd
Jamie to get int᧐ heated arguments ⲟn-sеt.
Their disagreements ѡere reportedly nevеr resolved prior to Jamie’s hospitalization,
and the friend ѕaid that Cameron wɑѕ suffering fгom һuge ‘guilt’ oveг the fact that she and her pal nevеr ‘made
amends’.
Althοugh filming fօr Back In Action іѕ finished,
thе source ɑdded thɑt thеre are ‘major setbacks іn post production’ for tһe Netflix-funded movie, noting thаt even Cameron isn’t sure wһat will һappen wіth the project.
ogorodkino.ru · September 15, 2023 at 2:12 pm
I will right away seize your rss as I can not in finding your email subscription link or newsletter service. Do you have any? Please permit me understand so that I may just subscribe. Thanks.
Jameshiz · September 15, 2023 at 2:20 pm
https://biowiki.clinomics.com/index.php/User:KlausLuciano
CharlesNeodo · September 15, 2023 at 2:44 pm
lasix 40 mg: Mail order Lasix – lasix medication
Jameshiz · September 15, 2023 at 2:45 pm
https://sustainabilipedia.org/index.php/User:LydaX15711830
Jameshiz · September 15, 2023 at 3:10 pm
https://taupi.org/index.php?title=User:ASWIola49996565
Jameshiz · September 15, 2023 at 3:34 pm
https://xdpascal.com/index.php/01sport.ru
kuhni_jef · September 15, 2023 at 3:39 pm
модульные кухонные гарнитуры угловые https://kuhni-garniturs.ru/
lakovCew · September 15, 2023 at 4:24 pm
На сайте https://gbmed.ru/ вы сможете ознакомиться с увлекательной информацией о здоровом образе жизни. Почитать интересные, полноценные статьи, в которых вы почерпнете важную информацию, а также узнаете полезные советы.
AejKrwddefinnagt · September 15, 2023 at 4:35 pm
This is best service where you can take a quick [url=https://bitcoin-price-usd.click/]Bitcoin Price USD[/url].
Calvingal · September 15, 2023 at 5:30 pm
¡Red neuronal ukax suma imill wawanakaruw uñstayani!
Genéticos ukanakax niyaw muspharkay warminakar uñstayañatak ch’amachasipxi. Jupanakax uka suma uñnaqt’anak lurapxani, ukax mä red neural apnaqasaw mayiwinak específicos ukat parámetros ukanakat lurapxani. Red ukax inseminación artificial ukan yatxatirinakampiw irnaqani, ukhamat secuenciación de ADN ukax jan ch’amäñapataki.
Aka amuyun uñjirix Alex Gurk ukawa, jupax walja amtäwinakan ukhamarak emprendimientos ukanakan cofundador ukhamawa, ukax suma, suma chuymani ukat suma uñnaqt’an warminakar uñstayañatakiw amtata, jupanakax chiqpachapuniw masinakapamp chikt’atäpxi. Aka thakhix jichha pachanakanx warminakan munasiñapax ukhamarak munasiñapax juk’at juk’atw juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at jilxattaski, uk uñt’añatw juti. Jan kamachirjam ukat jan wali manqʼañanakax jan waltʼäwinakaruw puriyi, sañäni, likʼïñaxa, ukat warminakax nasïwitpach uñnaqapat jithiqtapxi.
Aka proyectox kunayman uraqpachan uñt’at empresanakat yanapt’ataw jikxatasïna, ukatx patrocinadores ukanakax jank’akiw ukar mantapxäna. Amuyt’awix chiqpachanx munasir chachanakarux ukham suma warminakamp sexual ukhamarak sapa uru aruskipt’añ uñacht’ayañawa.
Jumatix munassta ukhax jichhax mayt’asismawa kunatix mä lista de espera ukaw lurasiwayi
uplotnitel_Onete · September 15, 2023 at 6:09 pm
уплотнитель для душевой двери https://mosuplotnitel.ru/
View website · September 15, 2023 at 6:15 pm
Bingo is a basic game where players mark spots on their cards that match the spots known ass out.
Here is my blog … View website
rabotavkemerovobop · September 15, 2023 at 6:37 pm
Работа в Кемерово
rokofskymn · September 15, 2023 at 6:54 pm
On the site https://www.sparklo.com/ with a unique solution for recycling waste. Install Resparkling and users will receive in-app rewards when they donate plastic bottles and cans. Redeem Sparklo rewards for discounts, promo codes and all sorts of fun free stuff. Recycling has never been so fun, and the planet is cleaner and more comfortable.
arsukoflifs · September 15, 2023 at 7:04 pm
На сайте https://sibvitr.ru/ закажите замер для того, чтобы для вас разработали торговое оборудование, качественную и стильную мебель, которая не утратит своих технических характеристик, внешнего вида. У вас есть возможность приобрести витрины, стеллажи, стойки, прилавки, торговые системы и многое другое. Все это из проверенных материалов. Все заказы выполняются в соответствии с требованиями, предпочтениями заказчика. Приятный бонус для покупателей – дизайн-проект, замер бесплатные. На производство мебели уходит неделя.
sex · September 15, 2023 at 7:42 pm
It is not my first time to pay a quick visit this web site,
i am visiting this site dailly and obtain pleasant facts from here all the
time.
viDgvDriek · September 15, 2023 at 8:40 pm
На сайте https://play.google.com/store/apps/details?id=com.sl1dingpenalty.msa вы сможете сыграть в БК «1xBet». Она принимает ставки с 2007 года и по 35 дисциплинам. В среднем маржа составляет до 5%. При этом регистрация не вызывает никаких сложностей. Это можно сделать в 2 счета. Каждый новичок получит приветственный бонус, который можно будет потратить на свое усмотрение. Важным моментом является то, что вас ожидают ежедневные экспрессы, у которых увеличенный коэффициент. Кроме того, бонусная программа предусмотрена, в том числе, и для постоянных клиентов.
code promo 1xbet burundi · September 15, 2023 at 9:25 pm
Hey There. I discovered your weblog the use of msn. That is a really smartly
written article. I will make sure to bookmark it and come back
to learn extra of your helpful info. Thank you for the post.
I will definitely comeback.
Cheap car insurance · September 15, 2023 at 9:27 pm
Your final thought truly linked everything together. I
cherish the notion you take into structuring your blog
posts.
Here is my webpage Cheap car insurance
elizarelene · September 15, 2023 at 9:45 pm
На сайте https://bombanews.com.ua/ вы сможете получить нужную и важную информацию, которая касается Украины, экономики, бизнеса, финансов, знаменитостей, здоровья. Есть актуальные и ценные данные, которые будут важны каждому, кто живет в этой стране. Имеются сведения о войне в Украине и о том, что думают об этом другие страны. Регулярно появляются новые данные, которые будут интересны и вам. Как только что-то происходит, то сразу же опубликовывается на этом сайте. Весь нужный контент на одном портале.
Calvingal · September 15, 2023 at 9:58 pm
Red Neural ukax mä warmiruw dibujatayna
¡Red neuronal ukax suma imill wawanakaruw uñstayani!
Genéticos ukanakax niyaw muspharkay warminakar uñstayañatak ch’amachasipxi. Jupanakax uka suma uñnaqt’anak lurapxani, ukax mä red neural apnaqasaw mayiwinak específicos ukat parámetros ukanakat lurapxani. Red ukax inseminación artificial ukan yatxatirinakampiw irnaqani, ukhamat secuenciación de ADN ukax jan ch’amäñapataki.
Aka amuyun uñjirix Alex Gurk ukawa, jupax walja amtäwinakan ukhamarak emprendimientos ukanakan cofundador ukhamawa, ukax suma, suma chuymani ukat suma uñnaqt’an warminakar uñstayañatakiw amtata, jupanakax chiqpachapuniw masinakapamp chikt’atäpxi. Aka thakhix jichha pachanakanx warminakan munasiñapax ukhamarak munasiñapax juk’at juk’atw juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at juk’at jilxattaski, uk uñt’añatw juti. Jan kamachirjam ukat jan wali manqʼañanakax jan waltʼäwinakaruw puriyi, sañäni, likʼïñaxa, ukat warminakax nasïwitpach uñnaqapat jithiqtapxi.
Aka proyectox kunayman uraqpachan uñt’at empresanakat yanapt’ataw jikxatasïna, ukatx patrocinadores ukanakax jank’akiw ukar mantapxäna. Amuyt’awix chiqpachanx munasir chachanakarux ukham suma warminakamp sexual ukhamarak sapa uru aruskipt’añ uñacht’ayañawa.
Jumatix munassta ukhax jichhax mayt’asismawa kunatix mä lista de espera ukaw lurasiwayi
AtyushRusia · September 15, 2023 at 10:18 pm
На сайте https://roseline37.ru/ можно приобрести свежие, изысканные цветы от производителя и по привлекательной цене. Перед вами цветы самого разного сорта. Здесь также можно заказать и изысканные авторские букеты, которые составлены виртуозами своего дела. В копании есть подарочные сертификаты, действует оперативная доставка. При необходимости можно выбрать элегантные, изысканные композиции. Перед вами самый большой выбор цветов, которые преподносят без повода либо на юбилей, день рождения.
AejKraddefinnagt · September 15, 2023 at 10:30 pm
This is very good service where you can take a quick [url=https://bitcoin-price-usd.top/]Bitcoin Price USD[/url].
Stevenarouh · September 15, 2023 at 11:23 pm
lasix generic: Furosemide over the counter – furosemida 40 mg
우리카지노추천 · September 15, 2023 at 11:47 pm
Whatevsr accountable gambling assistance you need to manage your play, OJO’s right here.
my homepage: 우리카지노추천
olovefeeft · September 16, 2023 at 12:57 am
На сайте https://askonamedicina.ru/ вы многое узнаете о здоровье, как его поддерживать, а также симптомами различных заболеваний и их профилактикой. Много полезной информации о диетах, о правильном питании детей, о суставах, о послеоперационном питании.
Robertdup · September 16, 2023 at 1:23 am
мебель на заказ москва
KelvinsheVe · September 16, 2023 at 2:17 am
https://lasixfurosemide.store/# buy furosemide online
GeorgeStach · September 16, 2023 at 2:17 am
neurontin 300mg tablet cost: neurontin 800 mg pill – neurontin 1800 mg
koltsa_sligO · September 16, 2023 at 2:40 am
Для идеального предложения на https://koltsa-s-brilliantom.ru/ купите помолвочное кольцо с бриллиантом из золота от 0,5 карат.
syanoced · September 16, 2023 at 2:43 am
If you want to get married in Las Vegas, then you should definitely go to https://www.tropicanachapel.com/ where you can get acquainted with the chapel of the Tropicana’s Island hotel. A beautiful wedding chapel will make your wedding chic and luxurious. Choose a chapel on Tropicana Island for your wedding.
Hemstädning Stockholm · September 16, 2023 at 2:56 am
Wonderful items from you, man. I’ve take note your stuff previous to and you’re simply
extremely wonderful. I really like what you’ve got here, certainly like what you
are saying and the best way during which you say it.
You are making it enjoyable and you still take care of to keep it wise.
I can not wait to read much more from you. That is really a tremendous website.
mochkatorM · September 16, 2023 at 4:54 am
На сайте https://play.google.com/store/apps/details?id=com.soccerball130.pong423 сделайте ставки в популярной БК «Бетсити». Вы сможете осуществить ставки в таких режимах, как лайв, прематч. Имеются, в том числе, и долгосрочные пари. БК может застраховать 100% от общей стоимости первой ставки. Но для того, чтобы получить все привилегии, необходимо пройти процедуру регистрации. А новичок сможет рассчитывать на бонус до 100 000 рублей. Перед вами огромный выбор ставок, а также событий. Сейчас БК считается одной из самых популярных.
Yvette · September 16, 2023 at 5:09 am
Kudos. Quite a lot of write ups.
View website · September 16, 2023 at 5:53 am
Verify the terms and conditions of the bonus prior to you sign up to make certain although.
Here is my page :: View website
insurance estimates · September 16, 2023 at 6:06 am
Your skills shines via in your well-crafted message, as well as
your capacity to crack down sophisticated concepts goes over.
Your real-world examples provide clarity and also relatability.
My web page insurance estimates
qr codes generator · September 16, 2023 at 6:36 am
Greetings! I’ve been following your weblog for a
long time now and finally got the courage to go ahead and give you a shout out
from Lubbock Tx! Just wanted to say keep up the
fantastic job!
yareklTal · September 16, 2023 at 7:05 am
На сайте https://svetodar.pro/ вы сможете записаться в клинику на услуги, связанные с лазерной коррекцией зрения. Если у малыша плохое зрение, то и в этом случае вам помогут квалифицированные, компетентные врачи популярной клиники «СВЕТОДАР». А студенты получают скидку на лазерную коррекцию зрения – 500 рублей. К каждому пациенту практикуется индивидуальный подход. Компания заботится о здоровье клиентов, начиная с 2013 года. В 4 клиниках работают 59 талантливых и компетентных врачей.
http://s.kakaku.com/jump/jump.asp?url=https://titusyecy.bloggersdelight.dk/2023/09/15/the-greatest-guide-to-kandy-sri-lanka · September 16, 2023 at 7:43 am
Hello mates, its fantastic article concerning cultureand
completely explained, keep it up all the time.
카지노추천 · September 16, 2023 at 7:56 am
Well-known Casino Superstitioons – As some currently know,
several casino
Here is my blog post: 카지노추천
hchegtug · September 16, 2023 at 8:30 am
На сайте https://mnu.com.ua/ вы найдете важную, интересную информацию, которая касается медицины, здоровья, эзотерики, психологии, детей и их воспитания. Здесь находятся только самые ценные, полезные и актуальные статьи, с которыми необходимо ознакомиться всем. Все материалы сопровождаются картинками, видеоматериалами для большего эффекта и повышения интереса у пользователей. Вы узнаете о том, как можно похудеть при помощи безопасных и простых методик. Будете в курсе того, какие продукты лучше всего употреблять, ограничиваясь в питании.
hchernut · September 16, 2023 at 9:25 am
On the site https://loan-quick-online.com/ you can apply for a quick loan online. Payday loans can be obtained quickly with a minimum set of documents. All registration takes place online without visiting the office, which makes the process as convenient as possible.
DonaldDeelp · September 16, 2023 at 10:11 am
Stumbled upon interesting material – I can’t help but recommend you to read http://www.lada-xray.net/member.php?u=2434
live porn · September 16, 2023 at 12:34 pm
Does your blog have a contact page? I’m having trouble locating it but, I’d like to send
you an e-mail. I’ve got some recommendations
for your blog you might be interested in hearing.
Either way, great site and I look forward to seeing
it develop over time.
Robertdup · September 16, 2023 at 1:40 pm
много мебели заказ
Stevenarouh · September 16, 2023 at 2:07 pm
lasix 100mg: Over the counter Lasix – lasix 100mg
khareQuory · September 16, 2023 at 2:39 pm
Наша компания ООО Южная Столица занимается оптовой и розничной продажей различных видов тары. Заходите на наш сайт https://stolitsa-61.ru У нас вы можете найти более 300 позиций пластиковой тары и большой выбор деревянных поддонов. Собственный ремонтный цех для деревянных поддонов б/у – качественная сортировка и ремонт. Опытные специалисты бесплатно проконсультируют и помогут с выбором наилучшего решения. Доставим своим транспортом по г. Ростову-на-Дону и ближайшим регионам. Доставка ТК по всей России
CharlesNeodo · September 16, 2023 at 3:03 pm
furosemide 40 mg: Mail order Lasix – lasix pills
Danieloxype · September 16, 2023 at 4:04 pm
Found an article that’s definitely worth your time – take a look https://armit.ru/social/user/42552/forum/message/1064/1066/#message1066
Kbxwro · September 16, 2023 at 4:26 pm
buy cenforce 100mg sale order cenforce generic buy chloroquine online
порно сайт · September 16, 2023 at 4:43 pm
порно сайт
KelvinsheVe · September 16, 2023 at 4:53 pm
https://gabapentin.bid/# gabapentin 600 mg
lgamonup · September 16, 2023 at 5:35 pm
На сайте https://ecolan37.ru приобретите качественное, приятное к телу постельное белье, выполненное из натуральных материалов, которые не линяют, сохраняют оттенок интенсивным и ярким. В разделе представлены подушки как для сна, так и используемые в качества декора. Имеются простыни, пледы, пододеяльники, топперы, наматрасники, фартуки, скатерти и многое другое. Вся продукция отличается привлекательной стоимостью, доступна оперативная доставка. Постельное белье можно приобрести как себе, так и в качестве презента.
GeorgeStach · September 16, 2023 at 5:40 pm
buy stromectol online uk: ivermectin 3 mg tabs – stromectol 0.5 mg
smofast_Gox · September 16, 2023 at 5:54 pm
https://smofast.com/
ashinden · September 16, 2023 at 6:02 pm
Официальный сайт https://trlx37.fun/ приглашает любимых игроков для игры в популярные игры. Различные и лучшие промокоды и раздачи от Trix37 позволяют насладиться игрой и получить удовольствие от процесса. Составляйте свои уникальные стратегии игры и выигрывайте в игры, которые представлены на сайте в огромном разнообразии.
Wxhaek · September 16, 2023 at 6:05 pm
purchase cialis sale buy sildenafil 100mg for sale buy generic sildenafil 100mg
Michaeltig · September 16, 2023 at 6:57 pm
kantorbola
moskvikep · September 16, 2023 at 7:08 pm
На сайте https://chasnovyn.com/ изучите информацию, которая касается политических, экономических новостей, бизнеса, культуры, спорта и многого другого. И самое важное, что все новости из первых уст, что позволит лучше разобраться в ситуации. Все статьи с фотографиями, цветными картинками для наглядности. Имеются данные о королевских особах, а также добровольцах, которые решили отправиться на спецоперацию. Регулярно появляются новые материалы, с которыми необходимо ознакомиться каждому.
link indexer page · September 16, 2023 at 7:20 pm
Hi there everyone, it’s my first pay a visit at this website, and article is really fruitful designed for me, keep up posting such articles or reviews.
page · September 16, 2023 at 7:46 pm
Hi there would you mind letting me know which web host you’re
utilizing? I’ve loaded your blog in 3 different web browsers and I must say this blog loads a lot faster then most.
Can you suggest a good hosting provider at a honest
price? Thanks, I appreciate it!
slot gampang gacor · September 16, 2023 at 8:32 pm
Today, while I was at work, my cousin stole my iPad and tested to see if it
can survive a 30 foot drop, just so she can be a youtube sensation. My iPad is now
destroyed and she has 83 views. I know this is totally off topic but I had
to share it with someone!
Сухой говяжий собачий корм 10 кг беззерновой Forward · September 16, 2023 at 8:54 pm
Сухой говяжий собачий корм 10 кг беззерновой Forward
Сухие кошачьи корма
Сухой корм для кошек пять киллограмм с говядиной беззерновой Forward – прекрасный набор для внимательных кошачьих собственников, которые жаждят вооружить личного питомца
здравым да сбалансированным рационом.
Представленный корм производится фирмой Forward, зарекомендованной собственным производственным
качеством и заботой о кошках
и собаках.
Выгоды сухого корма Forward
Узловые заслуги настоящего корма
заключаются в его собственной беззерновой формуле, коя может вывести съедобные зерновые из рациона кошки.
Беззерновая диета наверно сильно полезна для кошек с продовольственной
невыносимостью иными словами аллергией на зерно.
Корм равным образом сохраняет говядину, предстающую высококачественным родником протеина, нужного для поддержания состояния здоровья мускулатуры и совокупного благоденствия.
Что в свою очередь вмещается в беззерновой корм?
Комплекс корма содержит дополнительно
иные необходимые детали, такие
как, например, овощи, фрукты и присадки, удобряющие полезными
бАДами. Это дает повода обеспечить
кошку во всех отношениях всем главным для укрепления здоровья и защитных
систем животного. Продовольствие ещё заключает неплохие витамины и их аналоги и минеральные вещества, нужные
для укрепления превосходного уровня шкуры
и шерсти.
Выгодная обертка сухого корма
для собачек
Сухой собачий корм 10 киллограммов с говядиной беззерновой Forward
– дополнительно единолично образцовый продукт, представляемый командой Forward на базе Wildberries.
Представленный корм изобретен особо для псов и также,
подобно тому корму для кошек,
обладает беззерновую основу.
Небольшая расфасовка кормов для собаки
Сухой собачий корм 5 килограмм с мясом (говядина) беззерновой
Forward – это в целом подобный фабрикат предыдущему, но в более малой упаковке.
Он также рекомендован для собачек, особо для тех, у которых существует нюансы с переносимостью зерна или нетерпимостями.
Далее описаны основные свойства абсолютно
всех трех продуктов в сравнительной матрице:
Товарный ассортимент
Весовая категория
Главный элемент
Методика
Сухой корм для кошек 5 кг Forward
5 кг
Говядина
Беззерновая
Сухой корм для собак 10 кг Forward
10 кг
Говядина
Беззерновая
Сухой корм для собак 5 кг Forward
5 кг
Говядина
Беззерновая
Подобные корма доступны в интересах закупки в
онлайн-магазине Wildberries, в котором вы лично сможете обнаружить доскональную
информационную подборку о каждом отдельном из
их перечня, но также просмотреть ответы потенциальных клиентов.
Еще нужно подумать поговорить с ветеринаром, до того как вводить деформации
в рационе питания личного питомца.
simovacib · September 16, 2023 at 9:36 pm
На сайте https://keyfinans.ru/ вы сможете воспользоваться бухгалтерскими, юридическими услугами, а также заказать банкротство. Во время сотрудничества вы сможете рассчитывать на помощь нескольких бухгалтеров. Компания работает по всей России. Закажите услуги компании, которые обойдутся вам от 500 рублей. С тем, во сколько вам обойдутся работы бухгалтера, вы сможете ознакомиться на сайте. Сотрудничество как с ИП, так и предприятиями. Для того чтобы получить профессиональную консультацию и заказать услугу, необходимо отправить заявку.
AejKraqdefinnagt · September 16, 2023 at 9:45 pm
This is very good service where you can see a quick [url=https://bitcoinpriceusd.info/]Bitcoin Price USD[/url].
koydenhaber · September 16, 2023 at 10:42 pm
Its like you read my mind! You appear to know so much about this, like you wrote the book in it or something.
I think that you could do with a few pics to drive the message home
a bit, but other than that, this is wonderful blog.
A fantastic read. I will certainly be back.
https://maps.google.com.bz/url?sa=t&url=httpsahauntinginvenicemovie.com · September 17, 2023 at 12:34 am
I have read so many articles or reviews concerning the
blogger lovers however this piece of writing is genuinely
a nice paragraph, keep it up.
susloclarD · September 17, 2023 at 12:35 am
На сайті https://www.ritual24.kiev.ua/ замовте ритуальні послуги у Києві. Ритуальна служба Грааль. Компанія пропонує повний комплекс ритуальних послуг від Економ до VIP. Гарантуємо повний комплекс ритуальних послуг за доступними цінами, а похоронна церемонія пройде злагоджено і без проблемних моментів.
https://maps.google.ws/url?sa=t&url=https://ahauntinginvenicemovie.com · September 17, 2023 at 12:46 am
This is a topic that’s close to my heart… Best wishes! Where are your contact details though?
Sherrill · September 17, 2023 at 12:47 am
Woah! I’m really digging the template/theme of this website.
It’s simple, yet effective. A lot of times it’s very difficult to get that “perfect balance” between user friendliness and visual appeal.
I must say you’ve done a excellent job with
this. Also, the blog loads extremely fast for me on Opera.
Superb Blog!
Belinda · September 17, 2023 at 1:34 am
Hi there very nice web site!! Guy .. Beautiful .. Amazing ..
I will bookmark your website and take the feeds also? I am happy to seek out so many useful information right
here within the publish, we’d like develop extra techniques on this regard, thanks for sharing.
. . . . .
isakoKeync · September 17, 2023 at 2:40 am
На сайте https://kinognom.com/ вы сможете смотреть фильмы, сериалы, мультфильмы онлайн бесплатно в высоком качестве. Все самое свежее из мира кино, сериалов, мультфильмов на сайте, а также коллекции фильмов за прошедшие годы. Можно выбрать по жанру, году, странам и прочим параметрам. Коллекция пополняется ежедневно, что сделает просмотр еще более увлекательным.
zevaaBit · September 17, 2023 at 4:09 am
На сайте https://www.globussalon.ru вы сможете заказать средства, а также оборудование для очищения пруда. Также в разделе в большом ассортименте находятся и различные пленки, электрооборудование для водоема и сада. Имеются ручьи, садовые изливы, подводная подсветка и многое другое. Только в этой компании находится огромный выбор форм для пруда, а также инновационные средства для здоровья обитателей. Регулярно появляются новики, которые помогут вам в обустройстве участка. Все товары по привлекательной стоимости.
sex cams · September 17, 2023 at 4:21 am
Why people still make use of to read news papers
when in this technological world all is presented on net?
insurance business · September 17, 2023 at 4:57 am
Your blog post is an extensive information, and your insights are actually thought-provoking.
Your writing design is actually interacting as well as useful,
making the web content delightful to read.
my site – insurance business
filmagem vila velha · September 17, 2023 at 5:01 am
Hi, all is going fine here and ofcourse
every one is sharing facts, that’s truly fine, keep up writing.
порно сайт · September 17, 2023 at 5:16 am
порно сайт
bezruOpice · September 17, 2023 at 5:42 am
На сайте https://businessnews.in.ua/ вы узнаете первым новости из мира политики, экономики, финансов, недвижимости, транспорта. Имеются данные и про агробизнес, криптовалюту. Опубликованы самые последние новости, которые ответят на многочисленные вопросы. Для того чтобы вы ознакомились с той информацией, которая нужна, ее упорядочили по разделам. Имеются и мнения медийных личностей, которые охотно дают интервью на самые разные темы. Вам тоже будет интересно с ними ознакомиться. На портале регулярно появляются новые сведения, а потому добавляйте сайт в закладки, чтобы узнать обо всем первым.
astafeSub · September 17, 2023 at 7:46 am
De site https://parijs10.nl/ is een complete gids over Parijs en belangrijke reistips. Bekijk de lijst met attracties, waar u kunt verblijven in Parijs, wat u kunt zien en doen. Alle antwoorden voor reizigers naar Parijs verzameld op één plek.
Robertdup · September 17, 2023 at 8:01 am
мебель на заказ недорого по индивидуальным размерам
narkolog_rhymn · September 17, 2023 at 8:18 am
нарколог на дом https://mosgornarkolog.ru/
AejKraesefinnagt · September 17, 2023 at 9:23 am
This is very good service where you can see [url=https://bitcoinpriceusd.xyz/]Bitcoin Price USD[/url].
WayneIsolf · September 17, 2023 at 9:45 am
Opened up interesting material – I recommend sharing this discovery https://magiclife.ukraine7.com/t4992-topic#12749
JulioJag · September 17, 2023 at 9:46 am
world pharmacy india: pharmacy website india – cheapest online pharmacy india
Katherina · September 17, 2023 at 9:50 am
Hol dir den Schlankmacher der Stars: Reduslim kaufen!
Träumst du schon lange von einer schlanken Figur und einem gesunden Lebensstil? Dann ist Reduslim genau das Richtige für dich! Reduslim ist der neue Star am Abnehmhimmel und sorgt weltweit für Furore. Prominente Persönlichkeiten schwören bereits auf die herausragende Wirkung dieser effektiven Schlankheitsformel.
Reduslim ist ein innovatives Nahrungsergänzungsmittel, das deine Gewichtsabnahme revolutioniert. Mit einer speziellen Kombination aus natürlichen Inhaltsstoffen hilft Reduslim dir dabei, überschüssige Pfunde auf effiziente Weise zu verlieren. Durch die Einnahme von Reduslim wirst du dich schnell wohler in deiner Haut fühlen und voller Energie sein!
Die einzigartige Zusammensetzung von Reduslim zielt auf unterschiedliche Bereiche des Körpers ab, um maximale Ergebnisse zu erzielen. Mit seiner Fettverbrennungsformel beschleunigt Reduslim den Stoffwechsel, wodurch dein Körper dazu angeregt wird, überschüssiges Fett schneller zu verbrennen. Gleichzeitig hilft Reduslim auch dabei, deinen Appetit zu kontrollieren und Heißhungerattacken zu reduzieren. Du wirst dich satt und zufrieden fühlen, während du effektiv Pfunde verlierst.
Ein weiterer großer Vorteil von Reduslim ist seine natürliche Zusammenstellung. Es enthält ausschließlich natürliche Zutaten, die sicher und schonend für deinen Körper sind. Mit Reduslim kannst du ohne Bedenken abnehmen und dich auf reine Qualität verlassen.
Die Dosierung von Reduslim ist denkbar einfach. Als Nahrungsergänzungsmittel nimmst du einfach täglich eine Kapsel mit ausreichend Flüssigkeit ein. Die regelmäßige Einnahme gewährleistet eine kontinuierliche Wirkung und unterstützt dich auf dem Weg zu deiner Traumfigur.
Überzeuge dich selbst von der Wirksamkeit von Reduslim und lass dich von seinen Erfolgen inspirieren! Viele zufriedene Anwenderinnen und Anwender berichten von erstaunlichen Ergebnissen und dem positiven Einfluss auf ihre Gesundheit. Reduslim hat bereits zahlreichen Menschen geholfen, ihr Wunschgewicht zu erreichen und ihr Selbstbewusstsein zu stärken. Werde auch du Teil dieser Erfolgsgeschichte und bestelle Reduslim noch heute!
Verpasse nicht die Chance, Reduslim zu kaufen und deinen Traumkörper zu verwirklichen! Wir bieten dir die Möglichkeit, Reduslim zu einem unschlagbaren Preis zu erwerben. Höre auf die Erfahrungen der Prominenten und hole dir deinen persönlichen Schlankmacher der Stars!
Erfülle dir endlich deinen Wunsch nach einer schlanken Figur und einem gesunden Lebensstil. ReduSlim macht es möglich! Bestelle noch heute und erlebe die faszinierende Welt des erfolgreichen Abnehmens mit ReduSlim!
Look at my website; https://aproblemsquaredwiki.com/User:LashawndaStruthe
Michaeltig · September 17, 2023 at 10:47 am
boncel4d
pechat_rhymn · September 17, 2023 at 12:00 pm
печать на 3д принтере цена москва https://3d-pechat-studya.ru/
Patricksobby · September 17, 2023 at 12:13 pm
https://indiaph.ink/# indian pharmacy online
Joseempixelm · September 17, 2023 at 12:23 pm
lexapro 10 mg canada
Khaliloxymn · September 17, 2023 at 12:56 pm
propecia united states propecia without prescription propecia cost
masloDut · September 17, 2023 at 1:14 pm
На сайте https://xn—-7sbbavc9aikd9ain1exg.xn--p1ai/ вы сможете ознакомиться со всеми услугами маркетингового агентства, которое выполняет работы полного цикла. Здесь же получится заказать контекстную, таргетированную рекламу, профессиональную разработку сайтов, независимо от сложности. Также вам доступна и разработка дизайна. В компании работают профессионалы своего дела, которые не только выполнят все, как нужно, но и дадут ценные рекомендации. Агентство заполучило огромное количество постоянных клиентов.
Sammylet · September 17, 2023 at 2:11 pm
http://mexicoph.icu/# mexico drug stores pharmacies
Russellcrege · September 17, 2023 at 2:28 pm
Found an enthralling read that I’d recommend it’s truly fascinating https://1abakan.ru/forum/showthread-54557/
artemzen · September 17, 2023 at 3:00 pm
Наркологическая клиника в Москве https://narcology.pro/ это анонимное лечение алкоголизма и наркомании, детоксикация, капельницы по выводу из запоя на дому и в стационаре, любые виды кодирования с гарантией, а также срочный выезд врача на дом. Ознакомьтесь с полным списком услуг и ценами на сайте или получите бесплатную консультацию.
zavyaFueli · September 17, 2023 at 3:28 pm
На сайте https://zhittya.com.ua/ вы сможете получить всю нужную информацию на самую разную тему, которая касается людей, животных, растений. Также имеется информация по правильному питанию, о жизни знаменитостей и многом другом. Есть материал на тему бизнеса, экономики. Узнайте о нем первым. Есть данные на тему моды, красоты. Так вы узнаете о самых бюджетных масках для волос, секретных ингредиентах, которые помогут заполучить чистую, фарфоровую кожу. Будете в курсе стандартов красоты, а также упражнений, которые помогут справиться с лишним весом.
ushctrugh · September 17, 2023 at 6:30 pm
On the website http://fintech-software-development.com/ you can get acquainted with Fintech solutions in the field of software development for innovation. They offer efficiency, affordability and safety. From blockchain-based transactions to AI-based risk assessment.
Robertdup · September 17, 2023 at 7:23 pm
мебель для ванны на заказ
motorist coverage · September 17, 2023 at 7:26 pm
Yes! Finally someone writes about indiana.
Feel free to visit my web-site motorist coverage
ukhovThete · September 17, 2023 at 8:55 pm
На сайте https://eyeofgod.in вы сможете найти важную, актуальную информацию о человеке, которого давно ищите или с кем недавно познакомились, но хотите узнать о нем больше данных. Вся информация берется из открытого источника, компания занимается внедрением, проектированием защиты информационных систем. Воспользоваться программой очень просто. Сервис готов представить всю необходимую информацию о заинтересовавшем вас человеке. Ознакомьтесь со всеми продуктами, которые вас точно заинтересуют.
pugacruich · September 17, 2023 at 9:50 pm
На сайте https://oldpartner.ru/ вы сможете отравить заявку для того, чтобы воспользоваться профессиональными, качественными и грамотными услугами юристов с огромным опытом. Они решают, в том числе, и такие вопросы, как корпоративные споры, а также конфликты, арбитражные споры. Каждый специалист обладает огромным опытом работы – более 15 лет. В компании трудятся аудиторы, адвокаты, налоговые консультанты, оценщики. Они обладают необходимым уровнем знаний. Их услуги обойдутся недорого и будут оказаны в соответствии с законодательством.
https://watchpaidmoviesonlinemywr36926.blogdanica.com/ · September 17, 2023 at 10:10 pm
Awesome! Its in fact amazing post, I have got much clear idea on the topic of from this article.
fetisodiolo · September 17, 2023 at 10:14 pm
Go to https://atvspecifications.com/ and discover the power and agility of our latest ATVs, designed for both the enthusiast and the everyday rider. Dive into detailed specifications that cover engine performance, suspension dynamics, and advanced features. From horsepower to ground clearance, we’ve meticulously crafted each ATV to deliver unparalleled performance in any terrain. Explore, compare, and find the perfect match for your off-road adventures!
Hester · September 17, 2023 at 10:29 pm
Wow! This blog looks exactly like my old one!
It’s on a totally different topic but it has pretty much the
same page layout and design. Superb choice of colors!
Shari · September 17, 2023 at 10:47 pm
V kybernetické komunitě se objevují hlasité pochvaly a zářivá svědectví o bezkonkurenční účinnosti přípravku http://Wiki.Psychedelic-Lab.com/index.php?title=Benutzer:AudraFolingsby. Proto je nezbytné zdůraznit, že je důležité dodržovat poskytnuté pokyny a doporučení, aby se maximalizoval přínos přípravku Reduslim a předešlo se možným komplikacím. Tento čas bude mít stejný přínos jako 20 nebo 30 minut meditace, ale přechod k novému návyku bude mnohem snazší. Najdete zde velmi snadné meditace, kterými můžete začít svou praxi (5, 12 nebo 18 minut), a já vás budu ráda doprovázet. S každým sezením meditace, bez ohledu na to, kolik času jí věnujeme, se náš mozek více osvalí a začne uvolňovat hormony pohody. Bez ohledu na dané faktory vám Revolyn Keto Burn může pomoci zhubnout po usnadnění ketózy. Výrobky jsou k dispozici ve formě kapslí, musí být užívány podle pokynů bez dalšího dodržování stravy nebo cvičení. Padělané výrobky mohou být k dispozici v lékárnách a dalších zdrojích. Mohou se objevit viditelné příznaky, jako jsou změny na kloubech, ať už před nebo po progresi onemocnění. Německá společnost pro výživu uvádí, že viscerální tuk reaguje na změny ve stravě více než podkožní tuk. Není překvapivé, že svaly spalují v klidu více kalorií než tuk.
Místo toho tělo tuk rychle přemění na zdroj energie. Vaše tělo bude také silnější. Jakmile je vaše tělo spuštěno do ketózy, měli byste si všimnout změn ve vaší hmotnosti a svalech. 1. Voda pomáhá rehydratovat tělo a stimuluje růst nových buněk. Mletý muškátový květ, známý svými termogenními vlastnostmi, stimuluje proces spalování tuků v těle, což vede ke zvýšenému výdeji energie. Garcinia Cambogia: Tato exotická rostlina je bohatá na hydroxycitronovou kyselinu (HCA), která pomáhá snižovat chuť k jídlu a podporuje spalování tuků. Tímto způsobem se v posloupnosti činností stane první z nich “mentální rozbuškou”, která vás přiměje k meditaci. A tento čas se vyplatí, protože každodenní meditační praxe je formou rozvoje všímavosti, která má velmi pozitivní dopad na naši mysl, tělo, emoce, vztahy a dokonce i na naši výkonnost! Je důležité si uvědomit, že meditace je především zážitek, a zaznamenávání a dokumentování zážitků může být také účinným způsobem, jak zjistit účinky své praxe. Výsledkem je přirozeně snadný způsob, jak zhubnout a získat sebevědomí. Sport je skvělý způsob, jak rychle zhubnout.
Kromě toho mezi další výhody přípravku Revolyn Keto Burn patří lepší mentální ostrost, lepší spánek, lepší nálada a více energie. Všechny složky přípravku Reduslim spolupracují, aby poskytly účinnější doplněk pro hubnutí. Zpočátku pro vás bude mnohem snazší, když budete meditaci praktikovat krátce, například 3, 5 nebo 7 minut denně. Když se meditace stane v našem životě důležitou, můžeme si snadno uvolnit 3, 5, 10 nebo 30 minut času na meditaci. Samozřejmě je třeba také zmínit, že když si doplněk objednáte přímo z webu výrobce, máte samozřejmě 100% záruku, že jste si objednali originální produkt a ne nějaké falešné, padělané pilulky. Upozorňujeme, že pilulky pôsobia ako energia, ktorú možno zakúpiť v obchode. A proč říkám, že meditace vyžaduje trpělivost? V dnešní době existují na internetu tisíce meditací, najděte hlas průvodce, který vám pomůže najít spojení se sebou samým a zároveň strávit příjemnou chvíli meditace. Revolyn Keto Burn dostává nadšené recenze na internetu a na fórech.
Můžete si koupit Revolyn Keto Burn od společnosti Amazon, eBay a různých internetových obchodů. Praktické lékařství: – Atestace podle legislativy EU, Specializovaná způsobilost MZ Odborná praxe: 1991 – 1996 – anesteziologie a resuscitace, urgentní medicína – Klaudiánova nemocnice v Mladé Boleslavi 1997 – dosud – chirurgie – z toho 6 let Kardiochirurgie Fakultní nemocnice v Hradci Králové 2007 – dosud – vedoucí lékař M-Gate kliniky Pardubice, jednatel společnosti Medical Gate s. Je mi 34 let. Věk, kdy člověk zažije první záchvat dny, je 40 let. Mnoho lidí pociťuje první záchvat jako náhlý. První záchvat u mužů je vzácný a obvykle se objevuje po 40. roce života. Začlenění nového návyku do našeho každodenního života není snadný úkol, a proto musíme vydržet a být trpěliví. Stejně jako u každého nového návyku je důležité sledovat své pokroky, abychom si udrželi motivaci. Abychom dosáhli výsledků našeho cvičení, potřebujeme také trpělivost, protože podobně jako při sportu není práce na našich svalech vidět přes noc. Ale buďme upřímní, čas není problém, protože všichni máme stejně 24 hodin denně a někteří lidé dokážou meditovat každý den navzdory všem svým povinnostem. Tento záměr se svým způsobem stane vaší “mrkvičkou”. Díky meditaci budu trpělivější ke svým dětem. Díky meditaci budu v každodenním životě organizovanější.
JulioJag · September 18, 2023 at 12:21 am
medicine in mexico pharmacies: buying prescription drugs in mexico – buying from online mexican pharmacy
kvortssmove · September 18, 2023 at 12:59 am
На сайте https://budnovyny.com/ вы сможете получить всю самую актуальную, нужную информацию, которая касается бизнеса, инвестиций, рынка, ремонта, строительства, дизайна. Вся информация подается в обычной, простой форме, а потому вызовет интерес у каждого. Вы узнаете простой рецепт приготовления котлет по-киевски. Здесь представлено и интервью медийных лиц, их мнение на многие вопросы. Вы получите всю нужную информацию, которая будет для вас полезна. Регулярно на портале появляются новые данные, с которыми будет интересно ознакомиться каждому.
DennisElive · September 18, 2023 at 1:14 am
canadian valley pharmacy: certified and licensed online pharmacy – canadian pharmacy reviews
syannzitte · September 18, 2023 at 2:16 am
На маркетплейсе Первая миля https://cargo.sale/ вы сможете найти оптовых покупателей B2B по всей России, а также стать продавцом на площадке для продажи промышленных товаров и сырья бизнесу. Удобный поиск и выбор товаров в одном месте, сравнение условий нескольких производителей, отзывы о товарах и продавцах – все это делает маркетплейс удобной площадкой для взаимодействия продавцов и покупателей.
Patricksobby · September 18, 2023 at 3:39 am
http://canadaph.pro/# canadian pharmacy meds
kovry_Gox · September 18, 2023 at 3:55 am
https://detskie-kovry-1.ru/
alininTails · September 18, 2023 at 5:26 am
Зайдите на сайт https://elhim-iskra.com.ru/ и ознакомьтесь с огромным выбором тяговых аккумуляторов для вилочных погрузчиков от производителя ELHIM ISKRA. Каталог содержит полный перечень продукции, который представляет официальный дилер производителя Елхим-Искра в России. Всегда в наличии на складе большой ассортимент тяговых аккумуляторов и бесперебойные поставки со склада.
AejKramsefinnagt · September 18, 2023 at 5:46 am
This is very trust service where you can see [url=https://bitcoinpriceusd.cloud/]Bitcoin Price USD[/url].
Visa Application Online · September 18, 2023 at 7:04 am
Appreciating the time and effort you put into your blog and
detailed information you provide. It’s great to come across a blog every once in a
while that isn’t the same old rehashed information. Wonderful read!
I’ve bookmarked your site and I’m including your RSS feeds to my Google account.
Michaeltig · September 18, 2023 at 8:22 am
rikvip
crypto trading platform · September 18, 2023 at 9:29 am
Hey! Do you know if they make any plugins
to help with Search Engine Optimization? I’m trying to get my blog to rank for some targeted
keywords but I’m not seeing very good success. If you
know of any please share. Appreciate it!
etyakKed · September 18, 2023 at 10:02 am
На сайте https://uafakty.com/ почитайте интересную и любопытную информацию, факты про Украину. Имеется информация про политику, экономику, войну, бизнес, агро, культуру, медицину. Здесь находятся самые свежие, интересные и актуальные данные, которые помогут вам получить ответы на многочисленные вопросы. Все статьи составлены высококлассными авторами, которые отлично знают свою работу, ищут актуальный и новый материал в интернете. Вся информация подается в максимально простой, понятной форме, чтобы в ней смог ориентироваться каждый, независимо от статуса, возраста.
AejKramsefinnagt · September 18, 2023 at 11:44 am
Best and very trust service where you can see [url=https://bitcoinpriceusd.click/]Bitcoin Price USD[/url].
Robertalund · September 18, 2023 at 11:52 am
Found an enthralling article, I recommend you to read https://rst.adk.audio/company/personal/user/1577/forum/message/641/634/#message634
maraevcrime · September 18, 2023 at 12:06 pm
На сайте https://play.google.com/store/apps/details?id=com.one1.l1ne вы сможете сделать ставки в одной из самых популярных БК «Фонбет». К важным преимуществам компании относят то, что она отличается функциональным мобильным приложением, а также приветственным бонусом. Кроме того, компания принимает участие в развитии спорта. БК отличается большим количеством наземных, а также онлайн-заведений. Для прохождения регистрации необходимо нажать одноименную кнопку. Потребуется указать дату рождения, а также мобильный телефон.
conteMus · September 18, 2023 at 12:18 pm
На сайте https://play.google.com/store/apps/details?id=com.one1.l1ne сделайте ставки в популярной БК «Фонбет», которая предлагает огромное количество спортивных состязаний. А для новичков подготовила промокод на определенную сумму, что дает право существенно сэкономить. На регистрацию потребуется пара минут, что откроет для вас безграничные возможности. Все, что от вас потребуется, – ввести свои личные данные, номер телефона, электронную почту, а также пароль. Воспользуйтесь фильтром, который отберет предложения по виду спортивных состязаний, матчам.
code promo 1xbet · September 18, 2023 at 12:35 pm
With havin so much content do you ever run into any issues of plagorism or copyright infringement?
My website has a lot of exclusive content I’ve either authored myself or outsourced but it appears a lot of it is popping
it up all over the internet without my authorization. Do you
know any methods to help prevent content from being ripped off?
I’d certainly appreciate it.
rabotavkemerovobop · September 18, 2023 at 12:39 pm
Работа в Кемерово
sudakbum · September 18, 2023 at 1:01 pm
На сайте https://xn—-7sbbavc9aikd9ain1exg.xn--p1ai/ оставьте заявку для того, чтобы воспользоваться услугами популярного маркетингового агентства, которое предлагает контекстную, таргетированную рекламу. Предприятие на профессиональном уровне занимается созданием сайтов самого разного уровня сложности. Компетентные, надежные сотрудники выполнят разработку дизайна независимо от особенностей проекта. Опыт работы на рынке – более 5 лет, что позволило заслужить доверие клиентов.
free adult webcams · September 18, 2023 at 1:20 pm
Why viewers still make use of to read news papers when in this technological globe everything is existing on net?
ksanaacemy · September 18, 2023 at 1:52 pm
На сайте https://tour-pegas.ru/ вы сможете подобрать для себя и своей семьи тур на определенную дату. Необходимо лишь обозначить дату вылета, количество человек, а также то, когда планируется вылет. Система в автоматическом режиме подберет для вас подходящее решение. Ознакомьтесь с колонкой самых популярных направлений. К ним относят: Сочи, Абхазию, Беларусь. Регулярно на сайте выкладываются горящие предложения, которые помогут не только получить приятные впечатления, но и значительно сэкономить. Из всего многообразия вы обязательно выберете такой вариант, который обязательно вас устроит.
Sammylet · September 18, 2023 at 1:52 pm
http://mexicoph.icu/# medicine in mexico pharmacies
sovadchoxy · September 18, 2023 at 2:01 pm
На сайте https://isg-consult.com/ вы сможете заказать обратный звонок для того, чтобы вас проконсультировали по таким вопросам, как открытие корпоративного счета, бухгалтерское сопровождение в ОАЭ, налоговое планирование, регистрация, продление зарубежной компании. В компании трудятся компетентные, лучшие сотрудники, которые предпримут все возможное для повышения эффективности вашего бизнеса. Среди основных услуг предприятия выделяют и аутсорс-сопровождение физических, юридических лиц.
toptoursferaro · September 18, 2023 at 2:53 pm
[url=https://toptoursferaro.com]https://toptoursferaro.com[/url]
Most often, programs of daytime activities include group visits to local cultural and historical monuments, theaters and zoos.
http://www.toptoursferaro.com
JulioJag · September 18, 2023 at 3:05 pm
buying prescription drugs in mexico: purple pharmacy mexico price list – buying prescription drugs in mexico
LesterEmuro · September 18, 2023 at 5:08 pm
Обнаружил полезный сайт, который может быть полезным для многих сайт автор 24
toptoursferaro · September 18, 2023 at 5:15 pm
[url=https://toptoursferaro.com/]https://toptoursferaro.com/[/url]
Most often, programs of daytime activities classify bracket visits to local cultural and historical monuments, theaters and zoos.
https://toptoursferaro.com/
Tourist Visa Online · September 18, 2023 at 5:52 pm
I just couldn’t depart your site before suggesting that I
actually loved the usual info a person supply in your visitors?
Is gonna be again steadily to investigate cross-check new posts
Williamjum · September 18, 2023 at 6:43 pm
Found captivating reading that I’d like to offer you – you won’t regret it http://forum.woopodcast.com/newthread.php?fid=43&processed=1
Patricksobby · September 18, 2023 at 6:55 pm
http://mexicoph.icu/# purple pharmacy mexico price list
vaMarStiny · September 18, 2023 at 7:47 pm
На сайте https://play.google.com/store/apps/details?id=com.colorboxes034534 вы сможете воспользоваться всеми функциональными возможностями популярной игровой платформы «UP-X». Но это не только казино, а еще и БК одновременно. На сайте любой получает возможность выиграть приличную сумму денег и тем самым увеличить свой доход. Проект предлагает различные турниры, регулярно разыгрываются привлекательные призы. Сервис предоставляет возможность оперативного вывода денег. Площадка работает на честных и прозрачных условиях, что подтверждают многочисленные отзывы.
azinakeers · September 18, 2023 at 8:16 pm
На сайте https://komfortvl.ru/ вы сможете оформить заявку для того, чтобы выполнить ремонт квартир либо ванной комнаты. За долгое время работы удалось заполучить постоянных клиентов, а также подобрать надежных поставщиков материалов. Мастера, у которых огромный опыт, выполнят задачу, несмотря на ее сложность. Они ответят на вопросы, дадут профессиональную консультацию. Каждый заказчик получит подробную смету, в компании действуют прозрачные условия. С этим предприятием вы получаете возможность сэкономить на материалах.
Car insurance · September 18, 2023 at 8:28 pm
Your blog post is a goldmine of info. Each time
I explore, I leave behind along with brand new understanding.
Thank you!
Here is my blog post: Car insurance
arisamjep · September 18, 2023 at 8:30 pm
На сайте https://play.google.com/store/apps/details?id=com.colorboxes034534 вы сможете сделать ставки на популярной площадке «UP-X», которая представляет собой не только портал для игры, но и букмекерскую контору. Здесь любой гемблер получает возможность выиграть солидную сумму, если использовать все ресурсы, особенно везение, удачу. Контора работает на прозрачных условиях, честно. А потому всегда выплачивает положенные средства, судя по отзывам постоянных клиентов. Перед вами огромное количество развлечений на любой вкус.
KeithQuevy · September 18, 2023 at 8:41 pm
Discovered an article that might interest you – don’t miss it! http://drahthaar-forum.ru/viewtopic.php?f=30&t=7433
astasiJiply · September 18, 2023 at 10:34 pm
На сайте https://vgolos.org/ вы сможете получить всю важную и ценную информацию, которая касается таких сфер, как: экономика, политика, бизнес, технологии, криминал, здоровье. Все публикации составлены высококлассными авторами, которые отлично разбираются в теме. Регулярно публикуются новые данные на самую разную тему. Для того чтобы вы быстрее сориентировались, все новости поделены на категории. Новинки находятся в специальном столбце. Узнайте о них первым, чтобы всегда быть в курсе происходящего.
AejKramrefinnagt · September 18, 2023 at 11:14 pm
Best and very trust site where you can see [url=https://bitcoinpriceusd.top/]Bitcoin Price USD[/url].
nakrutka_Nuh · September 18, 2023 at 11:46 pm
накрутка пф заказать https://nakrutka-pf-bistro.ru/
yabinRot · September 18, 2023 at 11:56 pm
На сайте https://vmisti.kyiv.ua/ вы сможете ознакомиться не только с нужными и важными новостями из разных сфер деятельности Украины, но и прочитать интересные и любопытные статьи на тему здоровья. Так вы узнаете о том, какие продукты забирают энергию и ими лучше не питаться. Будете в курсе того, как правильно спать, чтобы чувствовать энергию, бодрость, отличное настроение. Все статьи на самую актуальную тему, а потому будут интересны каждому. Есть отдельные материалы на тему транспорта, инфраструктуры и многого другого.
월급실수령액표 · September 19, 2023 at 12:17 am
(You can see the lowest personal loan prices you may qualify for right here.) That mentioned, there are drawbacks.
spiridTor · September 19, 2023 at 12:33 am
На сайте https://tehstroy-city.ru/ закажите обратный звонок для того, чтобы воспользоваться такими нужными и важными услугами, как ремонт офисов, помещений, квартир. Компетентные, опытные сотрудники, которые регулярно повышают квалификацию, профессионально выполнят отделочные работы. Рассчитать приблизительную стоимость получится, если вы введете свои личные данные в форму. Здесь выполнят любой проект, независимо от сложности. Прямо сейчас ознакомьтесь с расценками на все виды работ.
olodypab · September 19, 2023 at 12:38 am
На сайте http://hostingbest.ru почитайте про виртуальный хостинг, а также его пользу для разных CMS-систем. На этом портале вы сможете получить всю исчерпывающую информацию о хостингах. Прямо сейчас вы сможете попробовать все ресурсы виртуального хостинга, причем абсолютно бесплатно. Это возможность создавать небольшие сайты-визитки, а также целые магазины. При необходимости можно арендовать виртуальные серверы, у которых почасовая оплата. Скорректировать конфигурацию получится в пару кликов.
Norse sagas · September 19, 2023 at 12:39 am
This is a topic which is near to my heart… Many thanks!
Where are your contact details though?
inIsee · September 19, 2023 at 1:09 am
cost of viagra sildenafil citrate viagra connect
DennisElive · September 19, 2023 at 1:10 am
buy prescription drugs from canada cheap: canadian pharmacy online – canadian pharmacy 365
alavreron · September 19, 2023 at 3:36 am
На сайте https://adsone.site/ ознакомьтесь с объявлениями от частных лиц, компаний, которые реализуют свои вещи, в том числе, бытовую технику, инструменты и многое другое. Причем вы можете приобрести как совсем новые вещи, так и б/у с хорошей скидкой. Также получится купить готовый бизнес, воспользоваться услугами высококлассных специалистов из разной сферы. Здесь продают объекты недвижимости. При необходимости воспользуйтесь специальным поиском, можно задать фильтрацию по стоимости.
casino_sligO · September 19, 2023 at 3:40 am
гранд казино зеркало на сегодня рабочее
asyanLyday · September 19, 2023 at 4:50 am
На сайте https://prometall.shop/ вы сможете воспользоваться полным комплексом услуг, а также приобрести чугунные печи от надежной и проверенной компании «Prometall». Компания предлагает не только продажу, но и установку по привлекательной стоимости. Можно приобрести банные печи в сетке, камне, а также отопительные печи. Все конструкции выполнены с учетом высоких технологий и с использованием инновационных комплектующих. Вы можете получить профессиональную консультацию абсолютно бесплатно.
Musreexy · September 19, 2023 at 5:22 am
cialis vs viagra cost cialis ingredients cialis viagra
JulioJag · September 19, 2023 at 5:28 am
reputable mexican pharmacies online: mexican rx online – reputable mexican pharmacies online
Robertdup · September 19, 2023 at 5:45 pm
https://filllin-daily.ru – авторитетный блог о косметологии. Статьи от проверенных авторов и практикующих врачей. Актуальные новости из мира бьюти.
laneenbr119.image-perth.org · September 19, 2023 at 7:01 pm
Greate post. Keep posting such kind of information on your blog.
Im really impressed by your site.
Hey there, You have done a fantastic job.
I’ll definitely digg it and for my part suggest to
my friends. I am sure they will be benefited from this web site.
сделать чеки на гостиницу в москве · September 19, 2023 at 9:46 pm
I got this site from my friend who told me regarding this web site and now this time I am visiting this website and reading very informative posts here.
happymod pro · September 20, 2023 at 12:06 am
I was recommended this web site by my cousin. I am not sure whether
this post is written by him as no one else know such detailed about
my trouble. You are wonderful! Thanks!
aDoroVub · September 20, 2023 at 2:43 am
На сайте https://capital.in.ua/ ознакомьтесь с новостями, интересной и актуальной информацией о стране, ритейле, политике, криминале, медицине, спорте. Все статьи составлены высококлассными, первоклассными авторами, которые отлично разбираются в данной теме. Они предоставляют только свежую информацию, которая будет интересна каждому. Имеются интервью политиков, а также первых лиц. Ознакомьтесь с топом лучших блогеров, которые пишут актуально, интересно и провокационно.
ntinaCoork · September 20, 2023 at 3:55 am
На сайте https://play.google.com/store/apps/details?id=com.sl1dingpenalty.msa вы сможете сделать ставки в популярной БК «1xBet», которая принимает их, начиная с 2007 года. У вас появляется шанс сделать ставки более чем на 35 дисциплин, а маржа в среднем составляет 4-5%. Но перед тем, как воспользоваться всеми инструментами и функциями сайта, необходимо пройти простую и оперативную регистрацию. К важным преимуществам конторы относят то, что каждый день готовятся ежедневные экспрессы, отличающиеся увеличенным коэффициентом. Новые, постоянные клиенты воспользуются особой бонусной программой.
Jameskes · September 20, 2023 at 5:21 am
http://interpharm.pro/# buy canadian drugs online
Veikkodup · September 20, 2023 at 5:36 am
Koe luonnon raikkaus [url=https://killapods.eu/fi/product/zyn-northern-woods/]Zyn Northern Woods[/url] nikotiinipusseilla, jotka tuovat mieleen Pohjoisen metsat!
terinenare · September 20, 2023 at 6:09 am
На сайте https://skupkaserebramoskva.ru/ вы сможете воспользоваться такой услугой, как скупка серебра различной пробы. При необходимости специалист приедет к вам. Работа происходит по Москве и области. Изделия выкупаются по большим ценам, чем это делает ломбард. Расчет как наличными, так и на карту. Предприятие максимально клиентоориентировано. Вы можете отправить фото своего изделия в данный момент для его оперативной оценки. Нет ограничений по выплатам. Для связи со специалистом предлагаются самые разные варианты.
Jasonsew · September 20, 2023 at 6:15 am
go get bonus
ppovaPaf · September 20, 2023 at 8:12 am
На сайте https://www.svartk.ru/ приобретите материалы и сварочное оборудование. Здесь есть электросварочное оборудование, газопламенная аппаратура, материалы, которые применяются для сварочных работ, а также разъемы, кабели, наконечники. В большом ассортименте находятся средства защиты для сварщика, компрессорное оборудование. Компания реализует такое оборудование, которое применяется для ремонта авто, во время строительных работ. Перед вами огромный выбор товаров высокого качества. Все они сертифицированные и на них распространяются гарантии.
Charliepet · September 20, 2023 at 10:55 am
https://xn--37-6kchb7a0bib.xn--p1ai/skachajte-mp3-i-otkrojte-mir-beskonechnoj-muzyki-na-musicmaestro/
документы на гостиницу в москве · September 20, 2023 at 4:22 pm
Wonderful site. Lots of useful information here. I’m sending it to a few buddies ans also sharing in delicious. And obviously, thank you for your effort!
Charliepet · September 20, 2023 at 5:33 pm
https://kfaktiv.ru/kak-ckachat-mp3-na-mobilnyj.html
find eco-friendly furniture · September 20, 2023 at 5:36 pm
Ꭰefinitely cօnsider that that yoᥙ saiⅾ.
Уour favourite reason appeared t᧐ ƅe on the webb the easieswt thіng to be mindful of.
Ӏ say to you, I certainly get irked whilst people consіder worries thɑt they plainly dⲟn’t know about.
Υou managed tօ hit thе nail ᥙpon the top аѕ smartly as defined out the whole thіng without
havіng ѕide effect , folks coսld take a signal. Will рrobably bbe аgain to
get more. Thank you!
Here іs my web-site; find eco-friendly furniture
evamatus · September 20, 2023 at 5:55 pm
На сайте http://www.ideas4rent.ru вы сможете взять в аренду различную мебель, а также оборудование для любых мероприятий, включая детские праздники, конференции, фестивали. Оперативная доставка выбранного товара в любую точку России. Вся мебель произведена из качественных, надежных материалов, за счет которых она прослужит долгое время. Все изделия чистые, ухоженного внешнего вида, поэтому подойдут для мероприятия различного масштаба. Ознакомьтесь с кейсами компании прямо сейчас.
Airambulance cost in jammu · September 20, 2023 at 6:00 pm
Airborne private jet is one of the best private jet
and air ambulance providers across the world.Also they have wide
range aircraft and expert medical team for any
kind of emergencies can be handled by them , main advantage they have point
of presence in multiple countries.
www.enni.gg · September 20, 2023 at 6:12 pm
Obtaining a negative credit score doesn’t necessarily eliminate
all your financial possibilities.
nazimhoW · September 20, 2023 at 11:40 pm
На сайте https://play.google.com/store/apps/details?id=com.only260.basketball623 вы сможете сделать ставки в популярной БК «Фонбет», которая отличается огромным количеством не только наземных, но и онлайн-казино. Пройти регистрацию можно на официальном портале либо через мобильную версию, приложение. Компанию основали в 1994 году, она предлагает осуществить ставки более чем на 35 видов спортивных состязаний, включая киберспорт. Маржа в среднем составляет 5%. Для игроков проводятся постоянные акции, действуют промокоды.
onchaCon · September 21, 2023 at 4:08 am
На сайте https://temryuk.jimdofree.com/ вы сможете получить всю необходимую информацию о городе Темрюк, который находится в России. Перед вами справочник, а также все необходимые телефоны предприятий, которые могут вам потребоваться в любой момент. Изучите гостевую книгу, а также расписание движения автобусов. Вызовите такси, если планируете куда-то отправиться. Опубликованы только самые надежные и проверенные компании, в которых работают вежливые водители. Они довезут до назначенного места.
elyangap · September 21, 2023 at 5:34 pm
На сайте https://skupkaserebramoskva.ru/ вы сможете рассчитать стоимость вашего изделия или заказать обратный звонок для того, чтобы получить исчерпывающую и профессиональную консультацию. В компании принимают серебро различной пробы. А с ценами за грамм вы сможете ознакомиться на сайте. При необходимости специалист выезжает в Москву и по области. Оперативный перевод средств на карту либо расчет наличными. К любому клиенту индивидуальный подход. Отправьте изделие для оценки через специальную форму.
wardrobe clothes organizer 2pcs · September 21, 2023 at 8:10 pm
You made some really good points there. I checked on the net for
more information about the issue and found most people will
go along with your views on this site.
Charliepet · September 22, 2023 at 3:29 am
https://orenburg.media/?p=207424
Алкомиг Екатеринбург доставка алкоголя · September 23, 2023 at 7:15 pm
Having read this I thought it was extremely informative. I appreciate you taking the time and effort to put this information together. I once again find myself spending a significant amount of time both reading and commenting. But so what, it was still worth it!
EliasClide · September 24, 2023 at 7:37 pm
labatoto
чеки на гостиницу в москве · September 24, 2023 at 9:10 pm
I think this is one of the most important information for me. And i’m glad reading your article. But wanna remark on few general things, The website style is great, the articles is really nice : D. Good job, cheers
https://zamknijkonto.pl/konto-oszczednosciowe-ranking · September 24, 2023 at 10:51 pm
I was suggested this website by my cousin. I’m not sure whether this
post is written by him as nobody else know such detailed about my problem.
You are amazing! Thanks!
документы на гостиницу в москве · September 25, 2023 at 8:56 am
Thank you a bunch for sharing this with all folks you really recognise what you are talking approximately! Bookmarked. Please also talk over with my web site =). We could have a link trade agreement among us
pośrednictwo kredytowe · September 25, 2023 at 11:55 am
certainly like your web site however you have to check the spelling
on several of your posts. A number of them are rife with spelling issues and
I to find it very troublesome to inform the reality on the other hand I’ll definitely come
back again. https://drive.google.com/drive/folders/1Yup8gWyaltiHzmveunXq5tJ9a83oaowg
https://www.casino79.in · September 25, 2023 at 3:33 pm
Its extension to Scientific themed games has made the software offering a effectively-established brand.
advertisements · September 26, 2023 at 5:22 am
What’s up to every one, for the reason that I am in fact keen of reading this web site’s post
to be updated regularly. It includes fastidious data.
Robertdup · September 26, 2023 at 7:23 am
https://lipetsk-lmk.ru/modules/field/modules/list/news/3/1/2/134_pochemu_stoit_ispolzovat_fillin.htmlлазерная эпиляция отзывы врачей
iyagooguexy · September 26, 2023 at 5:23 pm
На сайте https://saledivan.ru/ приобретите качественную, надежную и практичную мебель, которая создается из высококачественных материалов, которые прослужат длительное время и без потери технических характеристик, внешнего вида. На сайте получится приобрести мебель для гостиной, ванной, кабинета, а также мягкую, корпусную мебель. Все конструкции произведены в соответствии с самыми жесткими требованиями, по ГОСТу. Поэтому прослужат очень долго, радуя своими эксплуатационными сроками. Изучите наиболее популярные категории.
Jasonneige · September 26, 2023 at 7:20 pm
farmacie online autorizzate elenco: п»їfarmacia online migliore – farmacia online piГ№ conveniente
Part time job in Korean · September 27, 2023 at 3:43 pm
We were soon led to secret exchanges more than the anonymous messaging app, Telegram.
My site :: Part time job in Korean
stasiyspask · September 27, 2023 at 5:48 pm
На сайте интернет магазина сварочного оборудования, материалов и аксессуаров https://svarinstrument.ru/ ознакомьтесь с большим каталогом сварочного оборудования, запасных и расходных частей, сварочными материалами, компрессорным оборудованием и многими другими видами продукции по выгодным ценам. Возможен как самовывоз со склада в Екатеринбурге, так и доставка по всей России.
Jameszen · September 27, 2023 at 9:12 pm
Cкачать покердом на русском
Cкачать покердом на русском
Cкачать покердом на русском
Мерсине · September 27, 2023 at 9:34 pm
[url=https://nedvizhimost-v-mersine.com.ua/]Недвижимость в Мерсине[/url]
Добро припереться в Фотоагенство недвижимости в Мерсине – чемодан надежный партнер на колеи ко превосходнейшей недвижимости в Турции.
Недвижимость в Мерсине
fcpiter_Nuh · September 28, 2023 at 12:55 am
Ace Stream — мультимедийный комплекс для просмотра видеотрансляций онлайн без загрузки на ПК. Пользователи могут смотреть видео в браузере через торрент-ссылки. Программа интегрируется в популярные браузеры и имеет русскоязычный интерфейс. Основана на эффективной P2P-технологии, идеальной для трансляции футбольных матчей. Ace Stream позволяет смотреть футбол в хорошем качестве на различных устройствах. Болельщики могут находить трансляции на сайтах, вот тут подробная статья https://fc-piter.ru/match/135/, по ней можно разобраться как следить за матчами различных лиг в реальном времени.
888opzi · September 28, 2023 at 3:43 am
I used to be able to find good advice from your content.
https://8.ly/ · September 28, 2023 at 8:55 pm
I really like reading through a post that can make people think.
Also, many thanks for allowing for me to comment!
sphynx cat for sale · September 28, 2023 at 9:09 pm
Hello there, just became aware of your blog through Google, and found that it is really informative. I’m gonna watch out for brussels. I will appreciate if you continue this in future. Many people will be benefited from your writing. Cheers!
снять квартиру в Минске на сутки · September 29, 2023 at 9:25 am
It’s a shame you don’t have a donate button! I’d most certainly donate to this fantastic blog! I suppose for now i’ll settle for book-marking and adding your RSS feed to my Google account. I look forward to fresh updates and will talk about this blog with my Facebook group. Chat soon!
חשפניות · September 29, 2023 at 9:54 am
I am extremely inspired together with your writing skills and alsosmartly as with the format on your blog. Is this a paid topic or did you customize it yourself? Either way stay up the nice quality writing, it’s rare to peer a nice blog like this one these days..
androEncug · September 29, 2023 at 3:52 pm
На сайте https://oldpartner.ru/ запишитесь на консультацию, если необходима компетентная, квалифицированная помощь владельцам бизнеса. Вы всегда сможете обратиться за поддержкой к талантливым и опытным юристам, адвокатам, которые решат самые сложные вопросы быстро, качественно и по оптимальной стоимости. Они решают корпоративные споры, а также конфликты, оказывают юридическое сопровождение. Здесь работают сотрудники с огромным опытом работы. Изучите то, в каких ситуациях вам понадобится помощь адвоката.
www.designspiration.com · September 29, 2023 at 6:44 pm
Admiring the hard work you put into your website and detailed information you
present. It’s nice to come across a blog every once in a while that isn’t the same
old rehashed material. Wonderful read! I’ve bookmarked your site
and I’m adding your RSS feeds to my Google account.
how much do sphynx cats cost · September 29, 2023 at 7:59 pm
magnificent publish, very informative. I’m wondering why the other experts of this sector do not realize this. You should continue your writing. I am sure, you have a huge readers’ base already!
חשפניות · September 29, 2023 at 8:44 pm
I am really loving the theme/design of your site. Do you ever run into any web browser compatibility problems? A handful of my blog visitors have complained about my blog not operating correctly in Explorer but looks great in Chrome. Do you have any ideas to help fix this issue?
חשפניות · September 30, 2023 at 1:39 am
Hi there, its good piece of writing about media print, we all know media is a great source of information.
Great site · September 30, 2023 at 8:09 am
There are also extra promotions for poker players,
such as the Poor Beat Bonus and Royal Flush Bonus.
my homepage … Great site
노래방 알바 · September 30, 2023 at 10:37 pm
Access your joblist from anyplace and share it (if you want to).
JamesVer · October 1, 2023 at 4:11 am
india online pharmacy [url=https://indiapharm.cheap/#]indianpharmacy com[/url] indianpharmacy com
vaallSok · October 1, 2023 at 5:50 am
На сайте https://xakerforum.com/topic/282/page-11 вы сможете воспользоваться услугой хакера, связанной со взломом почты, социальных сетей, установлением слежки. На этом форуме только проверенные, надежные и профессиональные хакеры, которые работают на результат. Они не берут предоплат, а деньги просят только по факту выполненных работ. У всех специалистов опыт работы – несколько лет. Какой бы сложной не была задача, специалисты обязательно с ней справятся. Если и вам нужно узнать пароли – не медлите, сразу свяжитесь с хакером.
SolomonCep · October 1, 2023 at 10:00 am
Useful stuff. Thank you!
do essay writing services really work https://essayservicehelp.com undergraduate essay writing service
bykovMal · October 1, 2023 at 5:15 pm
На сайте https://jerl.ru/ вы сможете приобрести не только комплектующие для компьютера, но и планшеты, мониторы, телевизоры, наушники, камеры, электросамокаты от популярных, надежных марок. Вся техника доставляется максимально оперативно, а по Москве доставка обойдется от 390 рублей. Если появились вопросы, то вы всегда сможете воспользоваться профессиональной консультацией менеджеров. Они дадут исчерпывающие ответы на вопросы. В течение 2 недель вы сможете вернуть товары, если не подошли.
Horace Walpole · October 2, 2023 at 7:33 am
I am sure this piece of writing has touched all the internet visitors, its really really pleasant article on building up new webpage.
egortvon · October 3, 2023 at 9:25 am
Сайт https://hrustalev.com/ это огромный каталог готовых сайтов, а также такие услуги как: дизайн для сайта, продвижение и маркетинг, наполнение сайтов, настройка готового сайта, оптимизация сайта для SEO продвижения. Только оптимальные решения и комплексные решения задач онлайн и офлайн бизнеса.
LorenzoCoind · October 3, 2023 at 10:36 am
PETRA JORDAN
https://timdesigners.com/the-science-behind-intermittent-fasting-for-weight-loss-how-effective-is-it/ · October 3, 2023 at 11:36 am
Hurrah! Finally I got a web site from where I can genuinely get helpful
information regarding my study and knowledge.
отчетные документы за проживание москва · October 3, 2023 at 4:39 pm
Hi Dear, are you actually visiting this website regularly, if so after that you will absolutely take good experience.
LorenzoCoind · October 3, 2023 at 4:42 pm
JORDAN TOURS
WilliamdiC · October 3, 2023 at 10:50 pm
Opened up an intriguing read – let me share this with you http://tolyatty.net/forum/nauka/154855-kupite-meditsinskuyu-tekhniku-s-legkostyu-v-internete.htm
Robertdup · October 4, 2023 at 1:13 am
SEO-Doors.ru: развивайте свой бизнес с профессиональным SEO – https://telegraf.news/press-relizi/seo-doors-ru-razvivajte-svoj-biznes-s-professionalnym-seo/
חשפניות · October 4, 2023 at 1:26 am
I really like it when individuals come together and share views. Great blog, keep it up!
AejKtaxbafinnagt · October 4, 2023 at 4:40 am
This is good and trust site for check [url=https://bitcoinpriceusd1.site/]Bitcoin Price USD[/url].
Russellreoto · October 4, 2023 at 8:26 am
探尋娛樂城的多元魅力
娛樂城近年來成為了眾多遊戲愛好者的熱門去處。在這裡,人們可以體驗到豐富多彩的遊戲並有機會贏得豐厚的獎金,正是這種刺激與樂趣使得娛樂城在全球範圍內越來越受歡迎。
娛樂城的多元遊戲
娛樂城通常提供一系列的娛樂選項,從經典的賭博遊戲如老虎機、百家樂、撲克,到最新的電子遊戲、體育賭博和電競項目,應有盡有,讓每位遊客都能找到自己的最愛。
娛樂城的優惠活動
娛樂城常會提供各種吸引人的優惠活動,例如新玩家註冊獎勵、首存贈送、以及VIP會員專享的多項福利,吸引了大量玩家前來參與。這些優惠不僅讓玩家獲得更多遊戲時間,還提高了他們贏得大獎的機會。
娛樂城的便利性
許多娛樂城都提供在線遊戲平台,玩家不必離開舒適的家就能享受到各種遊戲的樂趣。高品質的視頻直播和專業的遊戲平台讓玩家仿佛置身於真實的賭場之中,體驗到了無與倫比的遊戲感受。
娛樂城的社交體驗
娛樂城不僅僅是遊戲的天堂,更是社交的舞台。玩家可以在此結交來自世界各地的朋友,一邊享受遊戲的樂趣,一邊進行輕鬆愉快的交流。而且,許多娛樂城還會定期舉辦各種社交活動和比賽,進一步加深玩家之間的聯繫和友誼。
娛樂城的創新發展
隨著科技的快速發展,娛樂城也在不斷進行創新。虛擬現實(VR)、區塊鏈技術等新科技的應用,使得娛樂城提供了更多先進、多元和個性化的遊戲體驗。例如,通過VR技術,玩家可以更加真實地感受到賭場的氛圍和環境,得到更加沉浸和刺激的遊戲體驗。
Stefangow · October 4, 2023 at 9:34 am
Работа в Новокузнецке
Robertlip · October 4, 2023 at 4:27 pm
Новости Чехии на русском сегодня
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
anataltaupt · October 5, 2023 at 2:52 am
На сайте https://rezumepro.com/ воспользуйтесь такой важной и нужной услугой, как составление профессионального резюме. Сервис располагает первоклассными специалистами, у которых огромный опыт. В обязательном порядке практикуется индивидуальный подход. По этой причине резюме составляется с учетом особенностей отрасли. Вы сможете работать напрямую со специалистом, который в обязательном порядке возьмет на вооружение ваши пожелания. Высококлассные специалисты сэкономят ваше время на том, чтобы создать работающее резюме.
JamesVer · October 5, 2023 at 3:55 am
mexican mail order pharmacies [url=http://mexicopharm.store/#]mexico drug stores pharmacies[/url] purple pharmacy mexico price list
https://canvas.instructure.com · October 5, 2023 at 8:44 am
Discover Vancouver for three nights with breakfast each day
in a four-star hotel and soak up Vancouver with a City Highlights Tour.
Robertlip · October 5, 2023 at 9:11 am
Европа последние новости
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
машинная штукатурка в цена · October 5, 2023 at 12:02 pm
Howdy are using WordPress for your blog platform? I’m new to the blog world but I’m trying to get started and create my own. Do you need any coding knowledge to make your own blog? Any help would be greatly appreciated!
Rafaelblarp · October 5, 2023 at 12:41 pm
KDslots merupakan Agen casino online dan slots game terkenal di Asia. Mainkan game slots dan live casino raih kemenangan di game live casino dan slots game indonesia
Robertlip · October 5, 2023 at 12:55 pm
Новости Чехии 2024
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
bs даркнет · October 5, 2023 at 12:59 pm
I’d like to thank you for the efforts you’ve
put in writing this blog. I am hoping to view the same high-grade content from you in the future as well.
In truth, your creative writing abilities has motivated me to get
my very own website now 😉
vgenifet · October 5, 2023 at 1:18 pm
На сайте https://krasnodarregistr.ru вы сможете прочитать про временную регистрацию, после чего оформить бумаги согласно закону. Вам обязательно необходима временная регистрация, если переехали в другой город. Она потребуется и для трудоустройства. Эта услуга действует исключительно для тех граждан, которые проживают на территории РФ. В компании работают компетентные специалисты, которые оформят бумаги согласно требованиям. Здесь же вы прочитаете о том, какие привилегии даст вам временная регистрация.
Lily · October 5, 2023 at 1:44 pm
%%
Take a look at my web blog https://nkzem.ru/novyy-mir/
Robertlip · October 5, 2023 at 2:08 pm
Последние новости Чехии сегодня
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
nnikoJak · October 5, 2023 at 2:18 pm
На сайте https://www.dcc.kz/ вы сможете получить деньги под залог своего автомобиля в Алматы от Dostyk Credit Company. Прозрачные условия, никаких скрытых комиссий. От подачи заявки до выдачи денежных средств всего 1 час. Ваш автомобиль остается в вашем распоряжении и гибкие условия кредитования, онлайн одобрение, удобный график погашения делают нашу компанию лидером рынка.
Jefferypeefe · October 5, 2023 at 2:29 pm
Наткнулся на интересный веб-сайт, который может стать вашим источником информации https://datalab.com.ua/ru/remont-zhestkogo-diska-dlya-uluchsheniya-yego-raboty/
Lqpoiv · October 5, 2023 at 3:32 pm
levitra pills digoxin pills buy tizanidine sale
Felixcrive · October 5, 2023 at 3:53 pm
buy medicines online in india: Online medicine order – indian pharmacies safe
salvage car lots near me · October 5, 2023 at 4:16 pm
Hurrah! At last I got a webpage from where I
be able to really get useful information regarding my study
and knowledge.
Look into my blog; salvage car lots near me
механизированная штукатурка москва · October 5, 2023 at 4:19 pm
Howdy excellent blog! Does running a blog similar to this take a massive amount work? I have very little knowledge of computer programming but I was hoping to start my own blog soon. Anyways, if you have any recommendations or tips for new blog owners please share. I know this is off topic nevertheless I just had to ask. Thanks!
https://www.freetto.net · October 5, 2023 at 4:20 pm
Your payday loan debt consolidation system also does not
seem on your credit report.
Dplyuj · October 5, 2023 at 4:25 pm
buy aceon 8mg clarinex 5mg oral allegra order online
best office chair singapore · October 5, 2023 at 4:49 pm
Hey would yoս mind stating ᴡhich blog platform үou’re working with?
I’m going tⲟ start mү own blog іn the near future but Ι’m haᴠing a tough
time choosing betweеn BlogEngine/Wordpress/Β2evolution and
Drupal. Tһe reason I ask is becausе your design and style seemѕ ⅾifferent then mߋst
blogs ɑnd I’m lookіng for something unique. P.S Sorry for getting off-topic but Ӏ һad to ask!
Αlso visit mу webpage … best office chair singapore
JamesVer · October 5, 2023 at 5:05 pm
canada pharmacy world [url=http://canadapharm.store/#]canadian pharmacy uk delivery[/url] canadian drug prices
visit here · October 5, 2023 at 5:33 pm
Oh my goodness! Incredible article dude! Thank you, However I am going through
problems with your RSS. I don’t understand the reason why I can’t join it.
Is there anybody else having the same RSS issues?
Anyone who knows the solution will you kindly respond?
Thanx!!
Robertlip · October 5, 2023 at 5:35 pm
Новости Чехии и Праги
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
Human · October 5, 2023 at 5:41 pm
Excellent weblog right here! Additionally your web site
rather a lot up very fast! What web host are you the usage of?
Can I am getting your affiliate hyperlink in your host?
I desire my site loaded up as fast as yours lol
https://online.4umovieshd.com/movies/the-legend-of-the-chupacabras/ · October 5, 2023 at 5:59 pm
What’s up, just wanted to say, I loved this post.
It was practical. Keep on posting!
sorokloyax · October 5, 2023 at 6:12 pm
На сайте https://istochnikienergii.ru/ почитайте интересную, содержательную информацию, которая касается источников жизни на Земле. Из публикаций вы узнаете о том, каковы причины популярности, а также типы источников энергии, которые возобновляются. Кроме того, есть информация о преимуществах возобновляемых источников. Статьи написаны экспертами, которые отлично понимают в теме и желают донести информацию до других. Также рассматриваются и недостатки возобновляемых источников энергии.
https://ww4.123gmovies.com/st-trinians-2-the-legend-of-frittons-gold123movie · October 5, 2023 at 6:22 pm
Hi, I do think this is a great website. I stumbledupon it 😉 I may come back yet again since i have book
marked it. Money and freedom is the greatest way to change, may you be rich and continue to guide
other people.
https://online.streamimovies.com/full-movie/i-love-lizzy/ · October 5, 2023 at 6:29 pm
Hey! Someone in my Myspace group shared this website with us
so I came to give it a look. I’m definitely loving the information. I’m book-marking and will be tweeting this to my followers!
Terrific blog and outstanding style and design.
emf reader level 5 · October 5, 2023 at 6:35 pm
I’m really enjoying the theme/design of your website.
Do you ever run into any web browser compatibility issues? A couple of my blog audience
have complained about my site not working correctly in Explorer but
looks great in Safari. Do you have any solutions to help fix this problem?
my web-site; emf reader level 5
Robertlip · October 5, 2023 at 6:45 pm
Последние новости Европы на сегодня
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
Rogercic · October 5, 2023 at 7:30 pm
Every visit reaffirms why I choose this pharmacy. mexican pharmaceuticals online: mexican drugstore online – buying prescription drugs in mexico online
Robertlip · October 5, 2023 at 7:52 pm
Новости Чехии на русском
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
pustinboype · October 5, 2023 at 8:02 pm
Visit https://graphitechinc.com/ for comprehensive information on graphics technologies designed for students who are interested in pursuing a career in commercial art, computer graphics, photography, or electronic media. Training focuses on commercial art, desktop publishing, advertising design, web design, sign making, computer assisted sign production, digital marketing and computer graphics.
Davidmaype · October 5, 2023 at 8:14 pm
Загляните на этот сайт и удивитесь тому, что вы найдете https://datalab.com.ua/ru/vosstanovleniye-dannykh-i-remont-vneshnego-flesh-nakopitelya/
kovry_Nuh · October 5, 2023 at 8:24 pm
иранские ковры недорогие
Thomasdob · October 5, 2023 at 8:28 pm
Found an article that’s definitely worth your time – take a look http://www.hristianka.ru/forum/r/prev_loaded/1/
Robertlip · October 5, 2023 at 8:59 pm
Новости Чехии и Праги сегодня
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
AejKtcadyfinnagt · October 5, 2023 at 10:20 pm
Best site for checking [url=https://bitcoinpriceusd1.online/]Bitcoin Price USD[/url].
토토사이트먹튀검증 · October 5, 2023 at 10:59 pm
You stand to earn as significantly as an added $500 thanks
to a deposit match.
registr_Gox · October 5, 2023 at 11:00 pm
временная регистрация для граждан рф https://registracia-vremennaya-spb.ru/
Robertlip · October 5, 2023 at 11:12 pm
Свежие новости Европы
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
football_boma · October 5, 2023 at 11:44 pm
смотреть футбол онлайн прямая трансляция
Robertlip · October 6, 2023 at 12:16 am
Новости Европы сегодня
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
Link Here · October 6, 2023 at 12:36 am
Touche. Sound arguments. Keep up the good work.
Davidmaype · October 6, 2023 at 12:59 am
Нашел интересный источник информации, который стоит изучить глубже https://datalab.com.ua/ru/vosstanovleniye-dannykh-i-remont-vneshnego-flesh-nakopitelya/
슬롯사이트 · October 6, 2023 at 1:22 am
As a outcome, gamers with diverse tastes will not be disappointed by the game
selection.
tlanaidrymn · October 6, 2023 at 1:25 am
На сайте https://www.pro-monument.ru узнайте телефон компании для того, чтобы заказать такую популярную и важную услугу, как изготовление, монтаж памятников, а также надгробий. Конструкции производятся из мрамора, гранита. Из-за того, что в компании трудятся высококлассные, опытные сотрудники, то они выполнят проект независимо от его сложности. Вы сможете заказать как элитные, так и эксклюзивные варианты. В стоимость включен весь спектр работ, в том числе, заливка бетона, облицовка, установка оград, столов.
ovaraiWoure · October 6, 2023 at 1:39 am
На сайте https://play.google.com/store/apps/details?id=com.soller.cine вы сможете сделать свои ставки в популярной конторе «Пари». Она принимает ставки на самые разные виды спорта, включая киберспорт. Пари рекомендует воспользоваться не одним десятком видов спорта, а также киберспортом. Предлагается вариативная роспись. После того, как пройдете регистрацию, а также верификацию, букмекер будет работать удаленно. Официальный портал работает всегда. Однако есть нюанс – заключить пари смогут только те, кто зарегистрировался.
sex hiếp dâm · October 6, 2023 at 2:24 am
bookmarked!!, I like your blog!
Robertlip · October 6, 2023 at 2:24 am
Новости Чехии
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
orislarbup · October 6, 2023 at 3:02 am
На сайте юридического портала https://potreb-prava.com/ вы сможете найти большой каталог различных договоров, образцы актов приема передачи, образцы соглашений или выбрать интересующий вас документ и описание к нему из множества рубрик, таких как: банки и кредиты, взыскание денежных средств, защита прав потребителя, недвижимое имущество и множества других рубрик или получить консультацию юриста.
Robertdup · October 6, 2023 at 3:11 am
Где заказать услуги по SEO-продвижению – https://ulanude.bezformata.com/listnews/zakazat-uslugi-po-seo-prodvizheniyu/122225315/
Robertlip · October 6, 2023 at 3:28 am
Чехия последние новости
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
osg 777 · October 6, 2023 at 4:45 am
continuously i used to read smaller content which also clear their motive, and that is also happening with this piece of writing which I am reading now.
바이낸스 수수료 · October 6, 2023 at 4:51 am
Howdy! This is kind of off topic but I need some advice
from an established blog. Is it difficult to set up your own blog?
I’m not very techincal but I can figure things out pretty quick.
I’m thinking about making my own but I’m not sure where to start.
Do you have any points or suggestions? Many thanks
ultra high vacuum systems · October 6, 2023 at 4:58 am
Keep this going please, great job!
Robertlip · October 6, 2023 at 5:38 am
Новости Европы 2024
– от чешского новостного агентства Деловая Европа, самое актуальные и свежие новости мира, Европы и Чехии
Pamala · October 6, 2023 at 6:05 am
With thanks! A lot of postings.
https://online.streamimovies.com/full-movie/pellet/ · October 6, 2023 at 6:15 am
This is really interesting, You’re a very skilled blogger.
I’ve joined your feed and look forward to seeking more of your wonderful post.
Also, I have shared your website in my social networks!
JamesVer · October 6, 2023 at 6:19 am
canadian drug [url=http://canadapharm.store/#]canadian pharmacy ed medications[/url] legitimate canadian pharmacy online
https://ww4.123gmovies.com/secret123movie · October 6, 2023 at 7:12 am
Keep on writing, great job!
https://card-credit-debt-help-onlinepl.educationalimpactblog.com/44564200/everything-about-card-credit-debt-help-online · October 6, 2023 at 7:43 am
Good day! Do you use Twitter? I’d like to follow you if that would be okay.
I’m undoubtedly enjoying your blog and look forward
to new posts.
바카라사이트 추천 · October 6, 2023 at 7:53 am
You’ll appreciate white linen service for dinner or pull
a chair up and dine at the relaxed wine bar.
linkedinctptpkje · October 6, 2023 at 8:02 am
[url=http://www.linkedinctptpkje.com]www.linkedinctptpkje.com[/url]
The complete exemplar to linkedin marketing and conclusion clients. Here are five ways to determine clients during LinkedIn.
linkedinctptpkje.com/consultation/
바이낸스 입금수수료 · October 6, 2023 at 9:13 am
Hello there, You’ve done a fantastic job. I’ll definitely
digg it and personally suggest to my friends. I’m
sure they will be benefited from this site.
Robinlep · October 6, 2023 at 9:31 am
http://canadapharm.store/# canadian family pharmacy
beli kanabis murah · October 6, 2023 at 9:44 am
Good day! This post could not be written any better!
Reading through this post reminds me of my good old room mate!
He always kept talking about this. I will forward this page to him.
Pretty sure he will have a good read. Thank you for
sharing!
sex · October 6, 2023 at 9:52 am
Hey there, You’ve done a great job. I will definitely digg
it and personally suggest to my friends. I am sure they will be
benefited from this site.
aZinadup · October 6, 2023 at 10:42 am
Visit https://tickets.rodeo/ for schedule and purchase rodeo tickets for 2023/2024. The largest calendar of rodeo and bull riding events in the United States. Use our ticket finder to buy rodeo tickets online and guarantee the best seats and rodeo ticket prices.
https://online.4umovieshd.com/movies/dragon-ball-z-plan-to-eradicate-the-super-saiyans/ · October 6, 2023 at 11:39 am
Appreciating the commitment you put into your site and
in depth information you offer. It’s awesome to
come across a blog every once in a while that isn’t the same old rehashed information. Excellent read!
I’ve saved your site and I’m adding your RSS feeds to my Google account.
Robertdup · October 6, 2023 at 11:44 am
SEO-продвижение сайта: ключевые стратегии и полезные инструменты – https://gid.volga.news/681072/article/seoprodvizhenie-sajta-klyuchevye-strategii-i-poleznye-instrumenty.html
Tricia · October 6, 2023 at 11:48 am
We stumbled over here from a different web address and thought
I should check things out. I like what I see so now i’m
following you. Look forward to looking at your web page for a second time.
1stinternet.com · October 6, 2023 at 12:51 pm
of time as compared to typical loan tenures (typically for a year).
Skye · October 6, 2023 at 1:14 pm
It is appropriate time to make a few plans for the future and it’s time to be happy.
I have read this post and if I could I desire to recommend you some attention-grabbing issues or suggestions.
Maybe you can write next articles relating to this article.
I want to read more issues about it!
Michaelpag · October 6, 2023 at 1:20 pm
india online pharmacy: indian pharmacies safe – mail order pharmacy india
montego bay jamaica airport transfer service · October 6, 2023 at 2:09 pm
These are truly enormous ideas in on the topic of blogging.
You have touched some pleasant factors here. Any way keep
up wrinting.
azaicFut · October 6, 2023 at 2:52 pm
На сайте https://dubaialco.ru/ закажите качественный, оригинальный и вкусный алкоголь, который добавит любому празднику ярких красок. Все спиртные напитки выполнены лучшими марками, которые отвечают за качество. Есть возможность приобрести шампанское, элитное вино, текилу, коньяк, бризер и многое другое. На сайте огромный ассортимент, что позволит быстро определиться с выбором и подобрать решение для определенного праздника. На спиртные напитки установлена привлекательная стоимость.
regis_Ceape · October 6, 2023 at 4:28 pm
временной регистрации москве https://registracia-v-moskve.ru/
atovaExcut · October 6, 2023 at 4:51 pm
Магазин https://whey.kz/ спортивного питания и витаминов 1 в Алматы и Казахстане предлагает огромный ассортимент витаминов для здоровья и спорта с доставкой. Самый большой каталог продукции, уникальные цены, только оригинальная продукция и возможность заказать не выходя из дома делают ваши покупки максимально удобными и выгодными. Ознакомьтесь и вы с широчайшим ассортиментом на сайте.
ovaaliArits · October 6, 2023 at 5:21 pm
На сайте https://slc-company.ru/ вы сможете узнать все подробности для того, чтобы воспользоваться такой полезной услугой, как кадровое, бухгалтерское обслуживание. Кроме того, доступно юридическое сопровождение, которое организуется высококлассными, компетентными специалистами. Они учитывают все нюансы работы. Первый месяц бухгалтерского обслуживания бизнеса предоставляется абсолютно бесплатно. Вы сможете заказать полный спектр бухгалтерского сопровождения. Компания работает на рынке 14 лет, а потому выполнит все так, как нужно.
JosephDug · October 6, 2023 at 5:35 pm
Discovered an intriguing article, I recommend you to check it out https://git.fuwafuwa.moe/thomasshaw9688/My-List/issues/3409
orbitreki · October 6, 2023 at 5:45 pm
[url=https://orbitreki.vn.ua/]orbitreki.vn.ua[/url]
Орбитреки рисуют собой эллиптические тренажеры чтобы симуляции движений ходьбы, бега также скандинавской ходьбы. Этто комбинированные тренажеры, тот или иной позволяют работать невыгодный только ногам, но и рукам.
orbitreki.vn.ua
sex · October 6, 2023 at 5:48 pm
I do not even know how I ended up here, but I thought this post was good.
I don’t know who you are but certainly you are going to a famous blogger if you aren’t
already 😉 Cheers!
Audra · October 6, 2023 at 6:11 pm
Thanks for every other informative blog. The place else could I
am getting that kind of info written in such a perfect approach?
I have a project that I am just now operating on, and I have been on the glance out for such info.
kolovaBoork · October 6, 2023 at 6:44 pm
На сайте https://dimonointeriors.com/ закажите дизайн как коммерческих, так и жилых помещений. Все услуги будут выполнены именно так, как вы хотите и в соответствие с требованиями. Прямо сейчас ознакомьтесь с портфолио, чтобы иметь представление о примерах работ. Вы сможете заказать дизайн апартаментов, частных домов, отелей, офисов, магазинов, медицинских учреждений. Можно оформить интерьер в самом разном стиле, включая минимализм, классику. Каждому клиенту прикрепляется личный менеджер, который будет курировать проект.
Rogercic · October 6, 2023 at 6:48 pm
Helpful, friendly, and always patient. reputable indian pharmacies: online shopping pharmacy india – canadian pharmacy india
Felixcrive · October 6, 2023 at 6:56 pm
canada ed drugs: buy drugs from canada – pet meds without vet prescription canada
JamesVer · October 6, 2023 at 7:17 pm
onlinepharmaciescanada com [url=http://canadapharm.store/#]global pharmacy canada[/url] prescription drugs canada buy online
MartinFew · October 6, 2023 at 7:25 pm
Не могу не поделиться этим захватывающим сайтом https://datalab.com.ua/ru/vosstanovlenie-dannyh-s-flash-nakopitelya/
Ellis · October 6, 2023 at 8:03 pm
When I originally commented I appear to have clicked on the
-Notify me when new comments are added- checkbox and now
whenever a comment is added I get 4 emails with the exact same comment.
There has to be a way you are able to remove me from that service?
Cheers!
RIO77 · October 6, 2023 at 8:12 pm
Right now it looks like Expression Engine is the preferred blogging platform available right now.
(from what I’ve read) Is that what you are using
on your blog?
simshvox · October 6, 2023 at 8:20 pm
At https://ziplines.vegas/ you can find Las Vegas Ziplines – as well as tickets and information about them. Four amazing ziplines: Fly LINQ Zipline at the LINQ Boardwalk, Rio Zipline at the Rio Hotel, Slotzilla in Downtown Las Vegas and Flightlinez Bootleg Canyon. On the site you can get guaranteed tickets to all upcoming events in Las Vegas at the lowest price.
begovyedorozhki · October 6, 2023 at 8:43 pm
[url=https://begovye-dorozhki.vn.ua/]begovye-dorozhki.vn.ua[/url]
Беговые дорожки являются одним из наиболее популярных равно лучших тренажеров чтобы бытового и тренажерного зала. Этто специальные симуляторы бега, каковые помогают вам трениться, улучшать близкую физиологическую фигуру да совершенствовать терпеливость ясно язык себе у себя чи в течение фитнес-клубе.
begovye-dorozhki.vn.ua
fremolen · October 6, 2023 at 9:05 pm
На сайте http://masl-credit.ru/ вы сможете ознакомиться с самыми надежными, популярными, проверенными МФО, которые выдают средства на честных условиях, без отказа. Они работают прозрачно, а потому в честности не приходится сомневаться. В перечисленных учреждениях регулярно занимают средства, а потом отдают с небольшим процентом. На сайте вы сможете воспользоваться такими финансовыми продуктами, как: кредиты, микрозаймы, дебетовые карты. Также есть раздел с лучшими предложениями займов. Изучите их сейчас.
Thai Casinos · October 6, 2023 at 9:34 pm
Hello! Do you know if they make any plugins to assist with
Search Engine Optimization? I’m trying to get my blog
to rank for some targeted keywords but I’m not seeing very good
success. If you know of any please share. Many thanks!
Portermer · October 6, 2023 at 10:51 pm
elavil coupon
Matiassteld · October 6, 2023 at 11:54 pm
bupropion preise
https://www.bepick.net · October 7, 2023 at 12:04 am
Their values are determined by the quantity of winners in each tier and the quantity of tickets sold.
orbitreki · October 7, 2023 at 1:03 am
[url=https://orbitreki.vn.ua/]orbitreki.vn.ua[/url]
Орбитреки представляют собой эллиптические тренажеры чтобы симуляции движений ходьбы, состязание равным образом скандинавской ходьбы. Это комбинированные тренажеры, тот или иной позволяют трудиться не чуть только ногам, хотя равным образом рукам.
orbitreki.vn.ua
vaZoybef · October 7, 2023 at 2:11 am
Wonderful super escort services are provided by the site https://girls-thailand.com/ – here you will find a wide selection of girls for unusual adventures. Helping women throughout their stay, our professional escorts will make your trip unforgettable. Girls-thailand.com guarantees you complete confidentiality and premium service. Contact us today and evaluate the quality of our super escort services.
orbitreki · October 7, 2023 at 2:40 am
[url=https://orbitreki.vn.ua/]orbitreki.vn.ua[/url]
Орбитреки представляют собой эллиптические тренажеры для симуляции движений ходьбы, бега равным образом скандинавской ходьбы. Этто комбинированные тренажеры, которые дают возможность работать невыгодный чуть только ногам, но равным образом рукам.
orbitreki.vn.ua
Free Porn Videos · October 7, 2023 at 3:15 am
Free Porn Videos
Lucretia · October 7, 2023 at 3:19 am
%%
My site … https://degentevakana.com/topics/view/46545
linkedinctptpkje · October 7, 2023 at 4:23 am
[url=https://linkedinctptpkje.com/linkedin-lead-generation-effective-guide-strategies-2023/]linkedinctptpkje.com/linkedin-lead-generation-effective-guide-strategies-2023/[/url]
The done guide to linkedin marketing and determination clients. Here are five ways to determine clients middle of LinkedIn.
linkedinctptpkje.com/lead-generation-for-b2b-sales-a-comprehensive-guide/
Онлайн казино · October 7, 2023 at 4:37 am
Это лучшее онлайн-казино, где вы можете насладиться широким выбором игр и получить максимум удовольствия от игрового процесса.
arataAcits · October 7, 2023 at 4:52 am
На сайте https://alcogoldubae.com/ приобретите качественный, премиальный алкоголь, который понравится всем вашим гостям, которые пришли на праздник. Если хотите отметить праздник, начало отпуска, то скорей посетите этот интернет-магазин, в котором вы найдете все, то вам нужно, включая крепкие алкогольные напитки либо легкие. Для дам выбирайте шампанское либо вино, а для мужчин – коньяк либо бренди. Вся продукция сертифицированная, высокого качества, поэтому точно вам понравится и абсолютно безопасна.
Sex videos online canada · October 7, 2023 at 5:10 am
Yes! Finally something about Sex videos online canada.
cannabis · October 7, 2023 at 7:30 am
Hi there, I believe your website might be having internet
browser compatibility issues. Whenever I look at your website in Safari, it looks
fine however when opening in I.E., it’s got some overlapping
issues. I simply wanted to provide you with a quick heads up!
Apart from that, excellent website!
Dorthea · October 7, 2023 at 7:41 am
Nicely put. With thanks.
linkedinctptpkje · October 7, 2023 at 7:50 am
[url=http://linkedinctptpkje.com]linkedinctptpkje com[/url]
The thorough enchiridion to linkedin marketing and conclusion clients. Here are five ways to determine clients during LinkedIn.
linkedinctptpkje.com/lead-generation-service/
nedvizh_Nuh · October 7, 2023 at 8:01 am
недвижимость в кипре https://agentstvo-nedvizhimosti-kipr.ru/
Damaris · October 7, 2023 at 8:15 am
%%
Here is my page; https://webranksite.com/sites-community-sc/
cash loan near me · October 7, 2023 at 8:29 am
I enjoy what you guys are usually up too. This sort of clever work and coverage! Keep up the excellent works guys I’ve added you guys to our blogroll.
Daniellox · October 7, 2023 at 9:38 am
Stumbled upon a captivating article – definitely take a look! https://topkif.nvinio.com/read-blog/36109
GaylordPam · October 7, 2023 at 10:08 am
Consistently excellent, year after year. http://azithromycinotc.store/# zithromax 500mg price in india
home look beautiful · October 7, 2023 at 10:14 am
Thanks in favor of sharing such а pleasant opinion, paragraph
іs pleasant, tһats ᴡhy i haνe rеad it compⅼetely
Нave a looқ at my web-site … home look beautiful
Donaldcaund · October 7, 2023 at 10:47 am
MAGNUMBET merupakan daftar agen judi slot online gacor terbaik dan terpercaya Indonesia. Kami menawarkan game judi slot online gacor teraman, terbaru dan terlengkap yang punya jackpot maxwin terbesar. Setidaknya ada ratusan juta rupiah yang bisa kamu nikmati dengan mudah bersama kami. MAGNUMBET juga menawarkan slot online deposit pulsa yang aman dan menyenangkan. Tak perlu khawatir soal minimal deposit yang harus dibayarkan ke agen slot online. Setiap member cukup bayar Rp 10 ribu saja untuk bisa memainkan berbagai slot online pilihan
https://freetto.net · October 7, 2023 at 11:27 am
Additional, the interest rate in the case of loans against securities also
varies based upon the kind of security.
dokiySit · October 7, 2023 at 11:32 am
Visit https://www.reddit.com/user/AmericanArenas/?rdt=40825 to explore America’s arenas and stadiums and the events they host, from concerts and theatrical performances to comedy shows and sporting events. Attend millions of events with guaranteed tickets.
begovyedorozhki · October 7, 2023 at 12:05 pm
[url=https://begovye-dorozhki.vn.ua/]begovye-dorozhki.vn.ua[/url]
Беговые дорожки являются одним с наиболее популярных и лучших тренажеров для бытового равным образом тренажерного зала. Этто спец. симуляторы бега, каковые подсобляют вам трениться, облагораживать близкую физиологическую фигуру а также совершенствовать выносливость прямо язык себя дома или в течение фитнес-клубе.
begovye-dorozhki.vn.ua
Crypto Vancouver · October 7, 2023 at 12:43 pm
Nice blog here! Also your site loads up fast!
What web host are you using? Can I get your affiliate link to your
host? I wish my site loaded up as quickly as yours lol
Hebrew Casinos · October 7, 2023 at 1:43 pm
Very good information. Lucky me I discovered your website by accident (stumbleupon).
I have saved it for later!
Thomassmure · October 7, 2023 at 2:19 pm
Нашел увлекательный сайт, который стоит изучить https://datalab.com.ua/vidnovlennya_zhorstkoho_dyska/
begovyedorozhki · October 7, 2023 at 2:52 pm
[url=https://begovye-dorozhki.vn.ua/]begovye-dorozhki.vn.ua[/url]
Беговые дорожки представляются одним из самых популярных и еще эффективных тренажеров для домашнего и тренажерного зала. Это спец. симуляторы состязание, какие подсобляют вам трениться, улучшать близкую физическую фигуру да развивать выносливость ясно у себя дома чи на фитнес-клубе.
begovye-dorozhki.vn.ua
Xrslcu · October 7, 2023 at 3:01 pm
buy cheap dilantin ditropan for sale online oxybutynin 2.5mg us
regist_rhymn · October 7, 2023 at 3:03 pm
временная регистрация в московской области https://registracia-v-msk.ru/
digital marketing · October 7, 2023 at 3:04 pm
Hi there would you mind sharing which blog
platform you’re working with? I’m looking to start my own blog soon but
I’m having a difficult time choosing between BlogEngine/Wordpress/B2evolution and Drupal.
The reason I ask is because your design seems different then most blogs and I’m looking for something completely unique.
P.S My apologies for getting off-topic but I had to ask!
Also visit my web blog – digital marketing
ailmoFluem · October 7, 2023 at 3:10 pm
Покер-румы и онлайн-казино предлагают широкий спектр азартных игр, включая популярные игровые автоматы. Блог о покере https://pokerblog.pro/ предоставляет свежие новости и советы, делая игры на реальные деньги еще увлекательнее и информативнее.
Jameshah · October 7, 2023 at 3:42 pm
http://doxycyclineotc.store/# doxycycline 100mg pills
Bobbylaw · October 7, 2023 at 3:52 pm
Global reach with a touch of personal care. http://edpillsotc.store/# ed pills online
Felixcrive · October 7, 2023 at 5:48 pm
impotence pills [url=http://edpillsotc.store/#]buy ed pills online[/url] ed meds online
BernardBeeft · October 7, 2023 at 6:25 pm
TARGET88: The Best Slot Deposit Pulsa Gambling Site in Indonesia
TARGET88 stands as the top slot deposit pulsa gambling site in 2020 in Indonesia, offering a wide array of slot machine gambling options. Beyond slots, we provide various other betting opportunities such as sportsbook betting, live online casinos, and online poker. With just one ID, you can enjoy all the available gambling options.
What sets TARGET88 apart is our official licensing from PAGCOR (Philippine Amusement Gaming Corporation), ensuring a safe environment for our users. Our platform is backed by fast hosting servers, state-of-the-art encryption methods to safeguard your data, and a modern user interface for your convenience.
But what truly makes TARGET88 special is our practical deposit method. We allow users to make deposits using XL or Telkomsel pulses, with the lowest deductions compared to other gambling sites. This feature has made us one of the largest pulsa gambling sites in Indonesia. You can even use official e-commerce platforms like OVO, Gopay, Dana, or popular minimarkets like Indomaret and Alfamart to make pulse deposits.
We’re renowned as a trusted SBOBET soccer agent, always ensuring prompt payments for our members’ winnings. SBOBET offers a wide range of sports betting options, including basketball, football, tennis, ice hockey, and more. If you’re looking for a reliable SBOBET agent, TARGET88 is the answer you can trust. Besides SBOBET, we also provide CMD365, Song88, UBOBET, and more, making us the best online soccer gambling agent of all time.
Live online casino games replicate the experience of a physical casino. At TARGET88, you can enjoy various casino games such as slots, baccarat, dragon tiger, blackjack, sicbo, and more. Our live casino games are broadcast in real-time, featuring beautiful live dealers, creating an authentic casino atmosphere without the need to travel abroad.
Poker enthusiasts will find a home at TARGET88, as we offer a comprehensive selection of online poker games, including Texas Hold’em, Blackjack, Domino QQ, BandarQ, AduQ, and more. This extensive offering makes us one of the most comprehensive and largest online poker gambling agents in Indonesia.
To sweeten the deal, we have a plethora of enticing promotions available for our online slot, roulette, poker, casino, and sports betting sections. These promotions cater to various preferences, such as parlay promos for sports bettors, a 20% welcome bonus, daily deposit bonuses, and weekly cashback or rolling rewards. You can explore these promotions to enhance your gaming experience.
Our professional and friendly Customer Service team is available 24/7 through Live Chat, WhatsApp, Facebook, and more, ensuring that you have a seamless gambling experience on TARGET88.
maraVDib · October 7, 2023 at 6:33 pm
На сайте https://alcoholdubae.com/ приобретите алкоголь в Дубае с оперативной доставкой. Перед вами огромный ассортимент спиртных напитков, которые обрадуют своим высоким качеством, безопасностью, а также интересным вкусом. На всю продукцию имеются сертификаты, которые подтверждают то, что спиртные напитки действительно качественные. Курьер примчит в ближайшее время, чтобы передать вам посылку. Оплатить ее вы сможете таким образом, как вам угодно. Если требуется помощь специалиста, то воспользуйтесь формой обратной связи, где вам ответят на все вопросы.
바이낸스 가입 혜택 · October 7, 2023 at 7:05 pm
Hi there everyone, it’s my first pay a visit at
this web site, and post is in fact fruitful for me, keep up posting such articles.
dmilaTow · October 7, 2023 at 7:50 pm
СибМетТранс https://smt38.ru/ это компания из Иркутска, которая занимается изготовлением металлоконструкций по чертежам заказчика и по чертежам, подготовленным нашим конструкторским отделом. Являемся производителем качественных металлоконструкций. Мы производим любые металлические конструкции на заказ по индивидуальным проектам. Работаем на объектах нефтегазовой отрасли и выполняем работы под ключ любой сложности.
RodneyDor · October 7, 2023 at 8:02 pm
brillx casino официальный мобильная версия
https://brillx-kazino.com
Добро пожаловать в захватывающий мир азарта и возможностей на официальном сайте казино Brillx в 2023 году! Если вы ищете источник невероятной развлекательности, где можно играть онлайн бесплатно или за деньги в захватывающие игровые аппараты, то ваш поиск завершается здесь.Brillx Казино – это не просто обычное место для игры, это настоящий храм удачи. Вас ждет множество возможностей, чтобы испытать азарт в его самой изысканной форме. Будь то блеск и огонь аппаратов или адреналин в жилах от ставок на деньги, наш сайт предоставляет все это и даже больше.
bs.gl · October 7, 2023 at 11:18 pm
Greetings! I’ve been reading your site for some time now and finally got
the bravery to go ahead and give you a shout out from Dallas Texas!
Just wanted to tell you keep up the good job!
Ron Spinabella · October 8, 2023 at 12:02 am
Wow that was odd. I just wrote an incredibly long comment but after I clicked submit my comment didn’t appear.
Grrrr… well I’m not writing all that over again. Regardless,
just wanted to say fantastic blog!
My site: Ron Spinabella
реферат по истории · October 8, 2023 at 12:06 am
реферат по истории
uznecvon · October 8, 2023 at 12:12 am
На сайте https://play.google.com/store/apps/details?id=com.soller.cine вы сможете сделать свои ставки в популярной БК «PARI», которая работает с 2022 года. Специалисты, которые работают в конторе, активно трудятся над развитием, а также продвижением бренда. Что касается линии букмекера, то она довольно широкая, а коэффициенты – умеренные, а вот маржа – средняя. Особенностью компании является возможность осуществлять быстрые ставки. К примеру, дартс, бридж. Здесь результат будет виден уже через пару минут.
ariyasiGot · October 8, 2023 at 12:44 am
На сайте https://megapolis-plit.ru/ ознакомьтесь с огромным выбором тротуарной плитки и брусчатки от производителя, а также с услугами по профессиональной укладке тротуарной плитки в Краснодаре. Гарантия качества на продукцию и услуги, доступная цена от производителя, бесплатная смета, консультация и квалифицированное выполнение услуг любой сложности.
شیتزو کراس · October 8, 2023 at 1:48 am
Asking questions are actually fastidious thing if you are not
understanding something completely, but this post gives nice
understanding even.
social media marketing · October 8, 2023 at 2:14 am
Greetings! Very helpful advice within this article!
It is the little changes which will make the greatest changes.
Thanks a lot for sharing!
https://ww4.123gmovies.com/homeless-to-harvard-the-liz-murray-story123movie · October 8, 2023 at 2:50 am
I loved as much as you’ll receive carried out right here.
The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get got an impatience over that you
wish be delivering the following. unwell unquestionably come more formerly
again as exactly the same nearly very often inside case you shield this hike.
https://timdesigners.com/exploring-the-tax-benefits-of-health-insurance-understanding-tax-write-offs/ · October 8, 2023 at 2:55 am
This is really fascinating, You are an overly skilled blogger.
I’ve joined your rss feed and stay up for searching for more of your
fantastic post. Also, I’ve shared your web site in my social networks
mivanexome · October 8, 2023 at 3:05 am
On the website https://schedules.football/ you can view the schedule of all football matches in 2023/2024, as well as buy guaranteed football tickets for all upcoming games at the lowest price. You’ll also get access to award tickets, schedule alerts, and other cool stuff.
pechat_Onete · October 8, 2023 at 3:30 am
3 d печать на заказ https://3d-pechat-moskwa.ru/
4ten.gg · October 8, 2023 at 4:41 am
This would give you a monthly repayment of £115.54 and a total amount repayable of £6,932.40.
https://online.4umovieshd.com/movies/freeheld/ · October 8, 2023 at 4:42 am
I think the admin of this website is actually working hard in support of his site, since here every stuff is quality based material.
vdimahaulk · October 8, 2023 at 5:11 am
Зайцев нет – это сайт для прослушивания музыки с понятным и удобным интерфейсом. В чарте треков пользующиеся популярностью песни. Есть музыка для вечеринки, работы, поездки в машине, свидания, уборки, отдыха на природе. На сайте https://zaycevnet.net 150 миллионов плейлистов и 50 миллионов уникальных треков. Вы легко сможете найти песню или подборку, которая будет соответствовать вашему настроению и музыкальным предпочтениям. Можете скачать музыку бесплатно на компьютер, телефон или планшет.
Robertdup · October 8, 2023 at 6:36 am
Как выбрать компанию для СЕО-продвижения и получить идеальный результат? – https://rusdozor.ru/2023/10/02/kak-vybrat-kompaniyu-dlya-seo-prodvizheniya-i-poluchit-idealnyj-rezultat_1375282/
zarovlem · October 8, 2023 at 7:06 am
Сайт https://family-style.online/ посвящен быстрому и эффективному решению проблем в семье: психологических, бытовых, социальных, проблем с детьми. На сайте есть множество статей по женской и мужской психологии, о воспитании детей, о заботе о детях, а также об организации и проведении как семейного досуга, так и досуга между супругами. Кроме того, на ресурсе поднимаются вопросы кулинарии, финансов, и других важных сфер жизни для каждого человека.
중도상환수수료 게산기 · October 8, 2023 at 7:49 am
Note that you may well not be eligible for specific cards
that come with particular perks or rewards.
emf bed shield · October 8, 2023 at 7:54 am
Hey I know this is off topic but I was wondering if you knew of any widgets
I could add to my blog that automatically tweet my newest twitter updates.
I’ve been looking for a plug-in like this for quite some time and
was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I look forward to your
new updates.
Here is my web-site: emf bed shield
www.4ten.gg · October 8, 2023 at 7:57 am
The difference is that a lender will be able to supply you a loan, whereas a broker is there to introduce you to
a lender.
GaylordPam · October 8, 2023 at 9:59 am
Their health awareness campaigns are so informative. http://azithromycinotc.store/# zithromax 500 mg lowest price pharmacy online
Korea Sports Betting · October 8, 2023 at 10:01 am
The countries of the region are part of a
political and economic bloc identified as Association of South East Asian Nations (ASEAN).
ovaNaNaree · October 8, 2023 at 11:02 am
On the website https://justfilm.org/ you can track the release dates of your favorite TV shows and get complete information about them. A large selection of trailers, TV shows from top and popular directors and various channels will give you the opportunity to study in advance what interests you, as well as add to the list for future viewing.
valparai indian bank ifsc code · October 8, 2023 at 11:29 am
Hi there, this weekend is good for me, because this point in time
i am reading this impressive informative article here at my
home.
inaekDrync · October 8, 2023 at 12:03 pm
Visit the website https://www.komtoo.net/ and check out a large catalog of web resources dedicated to such topics as: the best sites with event guides, the best travel guide sites, the best sports sites, the best sites with theater tickets. And also learn how a functional website design will help not only attract, but also retain customers.
ovairikep · October 8, 2023 at 12:05 pm
On the website https://topcasinosaustralia.net/ check out the best online casinos in Australia 2023. Top 5 online casinos in Australia in 2023 with a full description, characteristics, bonus program.
Robertdup · October 8, 2023 at 1:18 pm
SEO-продвижение: доверьте эту задачу компании seo-doors.ru – https://kirov.online/it-v-gorode/07/seo-prodvizhjenije-dovjertje-etu-zadachu-kompanii-seo-doors-ru
Bobbylaw · October 8, 2023 at 3:33 pm
A universal solution for all pharmaceutical needs. https://azithromycinotc.store/# how to get zithromax online
etjacusAde · October 8, 2023 at 5:37 pm
На сайте бренда классической мужской одежды https://millionaire-home.ru/ MILLIONAIRE ознакомьтесь с большим каталогом элементов мужского гардероба, таких как деловые мужские костюмы, кэжуал костюмы, рубашки, галстуки и трикотаж, а также верхняя одежда, обувь и аксессуары. Мы находимся в самом центре Казани, а качество нашей продукции давно завоевало репутацию высокого уровня.
velotrenazhery · October 8, 2023 at 6:56 pm
[url=https://velotrenazhery.vn.ua/]velotrenazhery.vn.ua[/url]
Велотренажеры – этто спец. тренажеры, нужные чтобы имитации велосипедной езды в течение помещении. Они представляются эффективным прибором чтобы физиологической оживленности и тренировки. Убежденность действия базируется на повороте педалей также твари сопротивления, изображающего разные условия сверху дороге.
velotrenazhery.vn.ua
skoda_jef · October 8, 2023 at 7:19 pm
https://avtoservice-skoda-3.ru/
Felixcrive · October 8, 2023 at 7:22 pm
zithromax 500 mg lowest price online [url=http://azithromycinotc.store/#]cheap zithromax pills[/url] buy generic zithromax online
ainnacep · October 8, 2023 at 7:33 pm
На сайте https://fonbet24.kz/ Фонбет Казахстан вы сможете ознакомиться с крупнейшим легальным букмекером, а также прочитать как зарегистрироваться, как осуществляется ввод и вывод денежных средств, какие бывают линии и коэффициенты букмекерской конторы, а также узнать о существующих бонусах и подарках.
Macroaintag · October 8, 2023 at 10:08 pm
Замена замка Москва newzamok.ru
В ситуации, когда Вам прямо сейчас необходимо открыть свою дверь или поломанный замок, позвоните по контактному телефону +7(495)707-19-11 или оформите заявку на нашем интернет ресурсе. Сколько различных ситуаций может произойти, все не перечесть. Утеряли ключи, сломался замок, заклинило дверь – по любым из этих вопросов как раз мы и специализируемся. Наша организация Новый Замок уже большое количество лет трудится в данной сфере по Москве и имеет превосходных опыт, команду настоящих специалистов, налаженный режим и при этом спокойные цены. Узнайте все тонкости на нашем интернет портале newzamok.ru и не потеряйте наш номер.
Если Вы планировали найти экстренное вскрытие в сети интернет, то скорее переходите на наш интернет сайт newzamok.ru сейчас. Вся важная для Вас информация же выложена и ждет своего времени, когда Вы наберете для вызова мастера. А таких случает бывает очень много и очень нередко.
Наверняка, каждый третий из нас попадал в такую мини неприятность. Наши заказчики часто звонят по схожим вопросам: вышел гулять с собакой, оставил дома ключи. Забыла ключи в другой сумочке и дверь закрылась, нередко говорят нам девушки. Ребенок играл и провернул ключ так, что часть осталась в скважине. Всякое может быть, но отлично, что есть мы-те, кто разрешат Ваши замковые задачи.
Звоните по любому вопросу, связанному с дверьми, также вскрытие заблокированных замков и другими. Работаем 24 часа в сутки и без выходных. Ведь кто скажет, в котором часу случится Ваша неприятность. Наш адрес: г. Москва, ул. Авиамоторная, д. 50, стр.1.
Также мы можем заменить любой замок на новый по любой причине. Работаем с любыми видами замков и стран-производителей. Наши работники регулярно обучаются новым технологиям, работают очень аккуратно, не повреждая ничего вокруг. Вызов специалиста происходит очень быстро, от двадцати минут, а стоимость приемлемая для всех, начинается от 500 рублей. Так что можете не переживать и довериться нам на все 100.
aekatCauck · October 8, 2023 at 10:46 pm
On the official website https://www.africanchamberofcommercetourism.org/ of the African Chamber of Commerce and Tourism you will learn about the organization’s mission in the field of business, tourism, trade, seminars, trade exhibitions and conferences and much more. get complete information on the website.
etiketki_Stima · October 8, 2023 at 10:55 pm
печать самоклеящихся этикеток https://etiketki-samokleyashiesya.ru/
Gregoryadoff · October 8, 2023 at 11:05 pm
Quick turnaround on all my prescriptions. how to get zithromax over the counter: buy Z-Pak online – zithromax 600 mg tablets
find more · October 8, 2023 at 11:24 pm
Yes! Finally someone writes about find more.
Snbzju · October 9, 2023 at 12:09 am
loratadine cost buy cheap claritin buy generic priligy for sale
Rap · October 9, 2023 at 12:30 am
El bitcoin rondaba el viernes su nivel más alto en lo que va de año después de que los criptoinversores se sintieran alentados por una victoria legal en la que se dictaminó que la criptodivisa XRP no es un valor. El halving de Bitcoin es uno de los eventos más importantes en el mundo de las criptomonedas y ocurre aproximadamente cada cuatro años. Este evento reduce la cantidad de Bitcoin que los mineros reciben como recompensa por validar transacciones y añadir bloques a la cadena de bloques de Bitcoin. En esta guía te explicamos cómo el halving afecta al precio de Bitcoin y a los inversores. En cuanto a los indicadores técnicos, 13 sugieren una compra, 3 indican una venta y 10 señalan una postura neutral. En concreto, el RSI(14), el CCI(20) y el MOM(10) indican venta. Además, el ATR(14) sugiere alta volatilidad en el mercado.
https://roomstyler.com/users/encriptarcripto
Utiliza tu clave de acceso para acceder a la Banca Online y sigue estos pasos: Inversión “Cada vez más gente está recurriendo al Bitcoin y a otros criptoactivos para conseguir dólares en la Argentina”, indicó a Clarín Germán Guismondi, experto en criptomonedas y asesor de empresas del sector. Al hacerlo, ni usted ni %USER_NAME% podrán ver las publicaciones del otro en Investing. @jonagalletaso Elon Musk, presidente ejecutivo de Tesla, insinuó el miércoles que volvería a recortar los precios de los vehículos eléctricos para impulsar la demanda en “tiempos turbulentos”, a pesar de que su guerra de precios sin cuartel reduce los márgenes de la empresa.Las acciones del fabricante de autos eléctricos caían un 4.6% tras los comentarios de Musk, a pesar de que Tesla superó las estimaciones de ganancias trimestrales.
https://newmoviereviews.blog5.net/63782215/5-simple-techniques-for-new-movies-online-for-free · October 9, 2023 at 12:31 am
WOW just what I was looking for. Came here by searching for Hindi Movies Online
eisafBax · October 9, 2023 at 12:32 am
На сайте МУЗ ТВ https://muztv.org/ вы сможете скачать бесплатную музыку или слушать онлайн на сайте. Все новинки музыки, популярные песни, альбомы доступны в высоком качестве и без регистрации. Воспользуйтесь поиском по музыкальным трекам и найдите любимую музыку и песни для скачивания или подберите музыку под настроение из готовых вариантов треков.
https://watchmoviesonline.blog-gold.com/28247767/top-guidelines-of-new-movies-free-online · October 9, 2023 at 12:39 am
It is appropriate time to make some plans for the
future and it’s time to be happy. I’ve read
this publish and if I could I wish to counsel you
few interesting issues or tips. Perhaps you can write next articles regarding this article.
I desire to read more things approximately it!
https://freemoviesonline.blogs-service.com/53093023/top-guidelines-of-where-can-you-watch-movies-online-free · October 9, 2023 at 12:57 am
Hiya! Quick question that’s completely off topic.
Do you know how to make your site mobile friendly?
My web site looks weird when viewing from my iphone 4.
I’m trying to find a theme or plugin that might be able to fix this problem.
If you have any recommendations, please share.
Thank you!
https://watchfreefull.bloggin-ads.com/45441572/watch-free-movies-and-tv-shows-online-now-an-overview · October 9, 2023 at 1:02 am
I’m really loving the theme/design of your blog.
Do you ever run into any internet browser compatibility problems?
A handful of my blog readers have complained
about my site not operating correctly in Explorer
but looks great in Firefox. Do you have any recommendations to help fix this
problem?
kovagamity · October 9, 2023 at 2:06 am
На сайте https://taker.blog вы сможете интересно, весело и необычно развлечься, сыграв в самые разнообразные игры. Попытайте свою удачу в топовых слотах. Возможно, вы сможете выиграть прямо сейчас. У вас получится заработать до 15% от рефералов. Каждый день сервис радует бонусами – 100 рублями. Уже сейчас многие выиграли приличную сумму денег, сделав ставки на самые популярные развлечения. Прямо сейчас вы сможете вывести выигранные средства либо пополнить баланс. Воспользуйтесь поиском для того, чтобы отыскать подходящую игру.
visit here · October 9, 2023 at 2:44 am
Hi everyone, it’s my first pay a quick visit
at this site, and post is genuinely fruitful designed for me,
keep up posting these types of content.
Office · October 9, 2023 at 2:51 am
Woah! I’m really enjoying the template/theme of this website.
It’s simple, yet effective. A lot of times it’s
very hard to get that “perfect balance” between user friendliness and visual
appearance. I must say that you’ve done a awesome job with this.
In addition, the blog loads very quick for me on Firefox.
Excellent Blog!
Macroaintag · October 9, 2023 at 3:51 am
Вызов специалиста по вскрытию замков newzamok.ru
Если Вам прямо сейчас нужно открыть свою дверь или поломанный замок, звоните по контактному телефону +7(903)174-11-18 или оформите заявку на нашем интернет ресурсе. Сколько разных ситуаций может случиться, все не перечислить. Забыли ключи, сломался замок, заклинило дверь – по любым из этих вопросов как раз мы и концентрируемся. Наша фирма Новый Замок уже много лет работает в представленной сфере по Москве и имеет колоссальный опыт, команду настоящих специалистов, налаженный режим и при этом спокойные цены. Смотрите все обстоятельства на нашем веб портале newzamok.ru и сохраните наш номер телефона.
Если Вы хотели найти замков в москве в сети интернет, то скорее идите на наш интернет ресурс newzamok.ru сейчас. Вся нужная для Вас информация же выложена и ждет своего часа, когда Вы позвоните для вызова мастера. А таких ситуаций бывает очень много и очень часто.
Наверно, каждый второй из нас попадал в такую мини неприятность. Наши клиенты часто звонят по таким вопросам: вышел в магазин за хлебом, забыл дома ключи. Забыла ключи в другой сумочке и дверь захлопнула, часто говорят нам девушки. Ребенок играл и провернул ключ так, что часть осталась в скважине. Всякое может быть, но хорошо, что существуем мы-те, кто решат Ваши замковые проблемы.
Звоните по любому вопросу, связанному с замком, также входной металлической двери и другими. Работаем круглосуточно и без выходных. Ведь кто скажет, в каком часу случится Ваша неприятность. Мы расположены по адресу: г. Москва, ул. Авиамоторная, д. 50, стр.1.
Также мы можем заменить любой замок на новый по любой причине. Работаем со всякими видами замков и стран-производителей. Наши специалисты постоянно учатся новым технологиям, работают максимально аккуратно, не повредив ничего вокруг. Вызов специалиста осуществляется очень быстро, от двадцати минут, а стоимость приемлемая для всех, начинается с 500 рублей. Так что можете не переживать и довериться нам на все 100.
slot online · October 9, 2023 at 4:16 am
Hey There. I found your blog using msn. This is an extremely well written article.
I’ll make sure to bookmark it and come back to read
more of your useful information. Thanks for the post. I will definitely return.
online television · October 9, 2023 at 4:43 am
Hello there! This article couldn’t be written any better! Reading through this post reminds me of my previous roommate! He always kept talking about this. I’ll forward this information to him. Pretty sure he will have a good read. Many thanks for sharing!
Arthurmer · October 9, 2023 at 5:00 am
venlafaxine 75mg billig
Josiahsteld · October 9, 2023 at 5:25 am
myambutol 600mg generika
Carson · October 9, 2023 at 5:47 am
I just could not leave your site prior to suggesting that I
extremely enjoyed the usual information a person supply
on your visitors? Is gonna be again ceaselessly to check out new posts
Wallacevah · October 9, 2023 at 6:00 am
pop over to this site https://de.onlinevideoconverter.pro/3iW/threads-video-downloader
cumshot videos canada · October 9, 2023 at 6:20 am
I think this is one of the most significant info for me.
And i am glad reading your article. But should remark on some general
things, The website style is perfect, the articles is really nice : D.
Good job, cheers
velotrenazhery · October 9, 2023 at 7:13 am
[url=https://velotrenazhery.vn.ua/]velotrenazhery.vn.ua[/url]
Велотренажеры – этто специальные тренажеры, предназначенные для имитирования велосипедной езды в течение помещении. Они являются эффективным инструментом чтобы физической активности и тренировки. Убежденность действия создан сверху повороте педалей и еще существе противодействия, имитирующего различные фон сверху дороге.
velotrenazhery.vn.ua
novaiRisse · October 9, 2023 at 7:54 am
На сайте https://smfor.to/ вы сможете получить всю необходимую информацию о том, как освоить профессию, которая будет вам необходима в будущем. Вы освоите новый для себя, полезный вид заработка, который поможет получить новую работу мечты. При этом заработок может стать вашим постоянным источником дохода, дополнительным либо основным методом заработка. Вы научитесь зарабатывать интересно и так, чтобы вам хватало денег на все. Перед вами не только курсы, но и продажа дебетовых карт. Воспользуйтесь обменом темами, получите ответы на другие вопросы.
Justinham · October 9, 2023 at 8:30 am
read the article https://it.onlinevideoconverter.pro/40kb/download-video-tiktok
velotrenazhery · October 9, 2023 at 8:57 am
[url=https://velotrenazhery.vn.ua/]velotrenazhery.vn.ua[/url]
Велотренажеры – это специальные тренажеры, предопределенные чтобы имитации велосипедной езды в помещении. Они представляются лучшим прибором для физической оживленности равным образом тренировки. Убежденность действия создан сверху повороте педалей и создании противодействия, моделирующего различные условия на дороге.
velotrenazhery.vn.ua
ratevnoish · October 9, 2023 at 9:03 am
Сайт https://gooool365.org/ это спортивный портал: спортивные онлайн трансляции, видеоархив прошедших матчей и обзоров онлайн. Футбольные или хоккейные онлайн трансляции – смотреть футбол или хоккей онлайн или всевозможные другие вида спорта в хорошем качестве можно на нашем сайте. Можно ознакомится с результатами прошедших матчей.
Stefangow · October 9, 2023 at 9:19 am
Работа в Новокузнецке
romanCut · October 9, 2023 at 9:26 am
Сайт https://podacha-blud.com/ посвящен украшению и подаче блюд на стол. Вы узнаете как правильно подавать салаты, блины, горячие блюда, как подать напитки, десерты или сервировать стол и просто украсить блюда.
www.wishlistr.com · October 9, 2023 at 10:47 am
Tyto výběry jsou zpoplatněny, takže je výhodné takto vybírat
jen vyšší sumy.
Clark · October 9, 2023 at 11:11 am
Terrific info, With thanks!
SpeedyPaper review · October 9, 2023 at 11:12 am
Link exchange is nothing else except it is only placing the other person’s website link on your page at suitable place and other person will also do similar for
you.
https://icorussia.org/groups/six-places-to-look-for-a-binance/info/ · October 9, 2023 at 11:19 am
Do you mind if I quote a couple of your posts as long as I provide
credit and sources back to your webpage? My blog is in the exact same area of interest
as yours and my users would genuinely benefit from a lot of the information you provide here.
Please let me know if this ok with you. Regards!
okna_rhymn · October 9, 2023 at 11:24 am
https://okon-remontov.ru/
Davidger · October 9, 2023 at 12:41 pm
Столкнулся с полезным ресурсом, который стоит изучить https://datalab.com.ua/vidnovlennya-danykh-ta-remont-zovnishnoho-flesh-nosiya/
Holdenoxymn · October 9, 2023 at 1:10 pm
antivert 25 mg online pharmacy
Macroaintag · October 9, 2023 at 1:37 pm
Когда мой домашний замок начал прихотливо работать, я был рад, что могу обратиться на newzamok.ru. Сервис был быстр и эффективен.
Frances · October 9, 2023 at 1:41 pm
My spouse and I stumbled over here coming from a different web page and thought I
might check things out. I like what I see so now i am following you.
Look forward to exploring your web page yet again.
mihailcah · October 9, 2023 at 2:42 pm
Томоград – сеть современных диагностических центров, всегда на страже Вашего здоровья! Компания специализируется на современных методах диагностики, включая МРТ, КТ УЗИ и рентген. Центры располагаются на территории Кубани, что делает доступ к качественной диагностике максимально удобным. Современное оборудование и опытные врачи обеспечивают точные и быстрые результаты, помогая вам заботиться о здоровье. Посетите сайт компании https://tomograd-kuban.ru/ чтобы получить подробную информацию и записаться на прием.
CharlesDus · October 9, 2023 at 3:14 pm
Столкнулся с полезным ресурсом, который стоит изучить https://datalab.com.ua/remont-zhorstkoho-dyska-dlya-pokrashchennya-yoho-roboty/
Nick DiFrancesco · October 9, 2023 at 3:26 pm
Thank you, I have recently been searching for information approximately this
topic for a while and yours is the greatest I’ve discovered
so far. But, what about the bottom line? Are you certain about the supply?
Winfred · October 9, 2023 at 3:48 pm
Thanks! Excellent stuff!
ikovaRab · October 10, 2023 at 6:27 am
На сайте http://klubmama.ru/ вы сможете ознакомиться с большой каталогом и фото поделок. Выберите из рубрик: новогодние поделки, поделки для малышей, осенние поделки, поделки своими руками, поделки из бутылок, поделки в школу, поделки маме, поделки для начинающих и десятков других рубрик, посмотрите фото и сделайте своими руками уникальные поделки и аппликации.
Douglaspef · October 10, 2023 at 9:00 pm
Stumbled upon interesting material – I can’t help but recommend you to read https://forum.jaslo4u.pl/viewtopic.php?f=94&t=31886
StevenBek · October 14, 2023 at 4:08 pm
canadian drug: canada drugs reviews – canadian pharmacy
yudiTop · October 14, 2023 at 8:08 pm
На сайте https://apps.apple.com/us/app/va-vada-royal-castle/id6463615585 вы сможете сыграть в интересную игру и даже получить за это много бонусов, а при успешном выполнении задания перейти на новый уровень. Каждого игрока ожидают интересные битвы – они помогут проверить вашу мудрость, а также то, как вы владеете оружием. В этой игре предусмотрено огромное количество врагов, с которыми вам предстоит сразиться. В конце страницы представлена вся необходимая информация об игре и ее технические характеристики.
nantoteari · October 14, 2023 at 11:52 pm
На сайте https://amberrainbow.ru/ реализуются браслеты, колье, бусы, кулоны, серьги, четки, различные сувениры, которые понравятся каждому, кто приходит в восторг от янтаря, его природной красоты и очарования. Перед вами большой выбор товаров, которые вы сможете преподнести второй половинке, на праздник либо юбиляру. Все изделия несут в себе положительную энергетику, добавят образу привлекательности и яркого стиля. Очень часто в магазине проходят распродажи, которые позволят сделать покупку более выигрышной.
kupitstraponjdog · October 15, 2023 at 12:18 am
[url=https://kupitstraponjdog.vn.ua/]kupitstraponjdog.vn.ua[/url]
Страпон – це універмаг, що належить отечественныйій конституції. ЯЗЫК ньому можуть знайти бажаючі продукти, напої (у тому числі алкогольні), книжки, зоотовари, дитячі товари, взросл’я та мажу, прикраси, взуття та вот одяг, захоплення (спорт, город, сад, дача тощо).
kupitstraponjdog.vn.ua
vetlanbor · October 15, 2023 at 3:16 am
На сайте https://play.google.com/store/apps/details?id=com.fooooo00tba11.tetris сыграйте в казино, которое предлагает огромное количество игр на самый взыскательный вкус. Вавада представляет собой один из самых популярных онлайн-казино, которое по достоинству оценено соотечественниками. Оно постоянно устраивает различные акции, радует щедрыми бонусами. Кроме того, применяется софт от лучших разработчиков, которые зарекомендовали себя с лучшей стороны. У казино имеется лицензия, которая подтверждает законность действий.
гибкий неон заглушки розовая 12х6 · October 15, 2023 at 2:10 pm
Когда мне потребовалась светодиодная бахрома, я был уверен, что на сайте neoneon.ru найду то, что мне нужно. Этот магазин меня не подвел. Здесь я нашел огромный ассортимент и качество, которому можно доверять. Теперь мои праздники будут незабываемыми благодаря этому магазину – [url=https://neoneon.ru/]неон купить цветной[/url]
сделать чек на гостиницу · October 15, 2023 at 3:29 pm
When I originally commented I seem to have clicked the -Notify me when new comments are added- checkbox and now each time a comment is added I get four emails with the same comment. Perhaps there is a means you can remove me from that service? Thanks a lot!
Michealleash · October 15, 2023 at 5:09 pm
комплексное снабжение строительных объектов http://media-dream.ru/
ovaAnZep · October 15, 2023 at 5:23 pm
Сайт https://www.forklift.blog/ это лучший источник информации и профессиональное издание о подъемно-погрузочной технике. Только свежие, актуальные, экспертные статьи обзоры и новости о погрузочной и подъемной технике, с постоянным обновлением и пополнением. Можно прочитать как свежие статьи, так и горячие темы, что обязательно будет интересно специалистам в данной тематике.
Aaronspobe · October 15, 2023 at 5:47 pm
buy cheap neurontin [url=http://gabapentin.world/#]neurontin 800 mg[/url] neurontin prescription coupon
vanadpat · October 15, 2023 at 6:05 pm
На сайте https://liketravelclub.ru/ вы получаете возможность забронировать путешествие у себя дома. Оформите заявку на тур прямо сейчас. Для этого необходимо ввести следующую информацию: направление, дату проживания, количество туристов, класс отеля, питание, а также рейтинг, обозначить наличие дополнительных услуг. Компания работает исключительно с лучшими отелями, туроператорами. Благодаря такому сервису бронирование отеля стало намного проще и быстрее, а оформить заявку получится в режиме реального времени.
salvage yards orlando · October 15, 2023 at 6:30 pm
What’s up colleagues, how is all, and what you desire to say regarding this paragraph,
in my view its really remarkable designed for me.
my homepage :: salvage yards orlando
urotech · October 15, 2023 at 6:47 pm
Hey! Someone in my Facebook group shared this site with us so I came to give it a look.
I’m definitely loving the information. I’m bookmarking and will be tweeting this to my followers!
Excellent blog and outstanding design.
kupitstraponjdog · October 15, 2023 at 6:53 pm
[url=https://kupitstraponjdog.vn.ua/]kupitstraponjdog.vn.ua[/url]
Член – це універмаг, що належить нашій конституції. ЯЗЫК ньому можуть знайти бажаючі продукти, напої (язык этому числі алкогольні), книги, зоотовари, дитячі товари, крупен’я та красу, прикраси, взуття та одяг, захоплення (спорт, яяма, сад, шале тощо).
kupitstraponjdog.vn.ua
светодиодный занавес play light плей лайт · October 15, 2023 at 7:00 pm
Когда я решил украсить дом к праздникам, мне понадобилась светодиодная бахрома. Она была найдена на сайте neoneon.ru, и это было открытие для меня! Здесь я нашел идеальное сочетание качества и доступной цены. Теперь мой дом будет сиять ярко и красочно – [url=https://neoneon.ru/]неон лента[/url]
avermSar · October 15, 2023 at 7:40 pm
На сайте https://lilibum.ru вы найдете свою вторую половинку, а также человека для общения. Перед вами огромный выбор анкет как мужчин, так и женщин, которые уже мечтают с вами познакомиться и начать вести беседу. Этот портал создан для того, чтобы у вас были серьезные отношения. Возможно, вы найдете человека по душе и захотите построить с ним крепкую семью. Для общения начните обмениваться фотографиями, напишите сообщение или сразу назначьте свидание. С той целью, чтобы воспользоваться опциями сайта, пройдите регистрацию.
find more · October 15, 2023 at 7:44 pm
You are so cool! I do not suppose I’ve truly read through a single thing like this
before. So great to discover someone with some genuine
thoughts on this subject matter. Seriously.. many thanks
for starting this up. This site is one thing that is required on the web, someone with some originality!
manroClurb · October 15, 2023 at 8:40 pm
Стоматологическая клиника https://kovalskii.dental/ в Хабаровске это лучшая новая стоматология, которая предлагает большой выбор услуг по приятным ценам. Мы оказываем услуги: лечение и профилактика, имплантация зубов, протезирование зубов, исправление прикуса, детская стоматология. Комфортная и доступная стоматология к вашим услугам с квалифицированными специалистами в своей области.
Dominicspaph · October 15, 2023 at 8:57 pm
美棒分析
美棒分析
Russellreoto · October 15, 2023 at 8:57 pm
nba分析
kvartiry_emaic · October 15, 2023 at 9:29 pm
квартиры на северном кипре цены https://kvartiry-na-kipre.com/
kupitstraponjdog · October 15, 2023 at 9:36 pm
[url=https://kupitstraponjdog.vn.ua/]kupitstraponjdog.vn.ua[/url]
Член – це універмаг, що належить свойібуква конституції. ЯЗЫК ньому можуть знайти бажаючі продукти, напої (у фолианту числі алкогольні), книги, зоотовари, дитячі товари, пышущий здоровьем’я та вот красу, прикраси, взуття та одяг, захоплення (яхтинг, яяма, сад, шале тощо).
kupitstraponjdog.vn.ua
займ без отказов здесь · October 15, 2023 at 9:41 pm
Оказавшись в сложной ситуации, я нашел выход на все-займы-тут.рф. 25000 рублей были мне переведены в течение короткого времени. Удобный интерфейс, детальная информация о каждом МФО и актуальные акции сделали процесс максимально комфортным. Проверено на себе, рекомендую!
Online Visa Application Form · October 15, 2023 at 9:54 pm
I’m gone to convey my little brother, that he should
also pay a quick visit this blog on regular basis to get updated from most up-to-date reports.
avaleVot · October 15, 2023 at 10:27 pm
На сайте https://roboty-pylesosy-77.ru/ вы сможете изучить весь ассортимент роботов-пылесосов и даже заказать бесплатный тест-драйв. Воспользуйтесь возможностью протестировать устройство и вернуть его в случае, если вам оно не подойдет. Если возникли вопросы, то воспользуйтесь профессиональной консультацией, позвонив по обозначенному телефону. Перед вами огромный ассортимент изделий, среди которых вы выберете то, что нужно. Все конструкции реализуются по доступной цене, что позволит заказать товар всем желающим.
Annmarie · October 15, 2023 at 11:02 pm
%%
Also visit my page; https://amcor.asia/
Microsoft · October 15, 2023 at 11:11 pm
Hello! I know this is kind of off topic but
I was wondering if you knew where I could locate a captcha plugin for my comment form?
I’m using the same blog platform as yours and I’m having difficulty finding one?
Thanks a lot!
nissan murano 2006 · October 15, 2023 at 11:12 pm
hey there and thank you for your info ? I?ve certainly picked up
something new from right here. I did however expertise a few technical points using this website, since I experienced to reload the web site many times previous to I could get it to
load properly. I had been wondering if your hosting is OK?
Not that I am complaining, but sluggish loading instances times
will often affect your placement in google and could damage your
high-quality score if advertising and marketing with Adwords.
Well I?m adding this RSS to my e-mail and could
look out for much more of your respective exciting content.
Make sure you update this again soon..
My web-site; nissan murano 2006
сколько стоит ремонт квартиры · October 15, 2023 at 11:47 pm
Качественный ремонт квартир Москва remont-siti.ru
Осуществляем ремонт на любом этапе высокого качества в Москве и по Московской области. Фирма СК СИТИ СТРОЙ имеет большой опыт строительства, проектирования, ремонта и рада представить свои услуги на веб сайте remont-siti.ru прямо сейчас. Переходите на следующий интернет ресурс и изучайте детали.
По теме [url=https://remont-siti.ru/tseny/]расценки на ремонт квартир[/url] мы рады Вам помочь. Если Вам нужен ремонт в обжитой квартире, или в только что приобретенной, новой, то Вы попали по адресу. Реализуем все типы ремонта, от простого чернового, до создания дизайн-проекта и осуществление работы под ключ. Работаем по всей столице и области. На веб портале remont-siti.ru можно рассчитать цену и сроки работы за пару минут. Введите подходящие параметры: площадь помещения, вид жилья, срочность, тип строительных работ и другие и получите тут же приблизительный ответ.
Сотрудничать с нашей организацией весьма выгодно, а также мы имеем ряд преимуществ. Стоимость ремонта не изменится после его реализации. Многие компании, начав ремонтные работы называют одну цифру, которая после проведения работ увеличивается в пару раз. Здесь такого не случится. Мы даем гарантию на все ремонтные работы в два года и исправим все недостатки, если вдруг они появятся, с огромным удовольствием. Мы приступаем к работе без предоплаты, а оставшиеся стройматериалы покупаем у вас, чтобы не захламлять Вашу квартиру ненужными вещами. Команда работников, которые имеют колоссальный опыт, постоянно проходят курсы повышения квалификации, чтобы понимать все новые технологии ремонта.
Если Вы планировали найти [url=https://remont-siti.ru/tseny/]сколько стоит ремонт квартиры[/url] в сети интернет, то переходите на наш сайт и отправляйте заявку. Наш специалист приедет к Вам и рассчитает цену предстоящих работ. Стоимость зависит от сложности работы, строительных материалов, выбранного вида работ и стиля помещения. На веб портале remont-siti.ru Вы сможете посмотреть таблицы установленных цен на разные виды работ. А ещё много уже готовых вариантов можно увидеть в нашей галерее.
Мы расположены по адресу: г. Москва, ул. Новослободская, д. 20, к. 27, оф. 6. График работы с 9:00 до 21:00. Позвоните по контактному телефону +7(495)153-60-54 и задавайте любые возникшие вопросы.
Nnjjxx · October 15, 2023 at 11:51 pm
buy generic inderal for sale buy cheap clopidogrel order plavix online cheap
ogdanCix · October 15, 2023 at 11:51 pm
На сайте https://xn—-7sbbppfjc7awwmj.xn--p1ai/ вы сможете заказать стильный, красивый фартук для кухни – скинали. Они выполнены в самых разных стилях. Можно подобрать вариант с абстракциями, текстурами, флористикой, природой, городами, восточной тематикой. Важным преимуществом фартуков является то, что они надежные, отлично спасают от брызг жира и придают помещению привлекательный и красивый внешний вид. У вас получится связаться со специалистами напрямую и задать все интересующие вопросы.
vaaliThynC · October 16, 2023 at 12:01 am
Visit https://50centtickets.org/ to purchase prime seat tickets and VIP packages for 50 Cent’s upcoming concerts in 2023/2024. Check out the schedule of events, find a suitable and convenient concert and be sure to attend the event.
Kevinhig · October 16, 2023 at 12:05 am
2024總統大選
2024總統大選
Yasmin · October 16, 2023 at 12:30 am
After looking into a few of the articles on your web site, I
honestly appreciate your technique of blogging.
I added it to my bookmark site list and will be checking back
in the near future. Please check out my website as well and tell me
your opinion.
купить строительную осветительную гирлянду · October 16, 2023 at 12:44 am
Не могу не поделиться этим удивительным магазином neoneon.ru! Они предлагают широкий выбор гибкого неона, светодиодных сосулек и led гирлянд, которые могут преобразить любое пространство. Я нашел здесь все необходимое для создания уютной атмосферы в своем доме – [url=https://neoneon.ru/]LED неон купить[/url]
Sander Finish · October 16, 2023 at 12:48 am
I simply couldn’t leave your site before suggesting that I
actually enjoyed the usual information a person supply on your visitors?
Is gonna be again ceaselessly in order to inspect new
posts
aicevgriex · October 16, 2023 at 1:20 am
На сайте https://play.google.com/store/apps/details?id=com.balljump.rememberwhat вы сможете поиграть в увлекательные и интересные игры, представленные лучшими разработчиками. Так вы получите огромный опыт в данной сфере и станете профессионалом. Перед вами огромный выбор слотов, а также интересных настольных игр, живых дилеров. В такие игры вы сможете сыграть на настоящие деньги и сорвать неплохой куш. Многие пользователи играют просто ради удовольствия и для того, чтобы разнообразить досуг.
займы без поручителей · October 16, 2023 at 2:13 am
Мой сын поступил в университет, и нам срочно понадобилось 25000 рублей на первый взнос за обучение. В Google я нашёл все-займы-тут.рф и оформил займ. Теперь мой сын учится в престижном вузе, а я знаю, где в случае чего взять деньги.
Zacharysaupe · October 16, 2023 at 2:21 am
http://referaty-na-zakaz.ru
Manuelbriek · October 16, 2023 at 2:29 am
canadian pharmacy cheap: cheap canadian pharmacy – canadian pharmacy cheap
hinsasbeews · October 16, 2023 at 3:26 am
On the website https://grandcanyontours.vegas/ you can book the best excursions around the GRAND CANYON from las vegas. Unique offers daily by luxury bus, helicopter, plane, boat. Discount Grand Canyon Tours from Las Vegas. Book your tour now for the best offer.
shovaRip · October 16, 2023 at 3:53 am
На сайте https://o-okkultizme.com/ вы сможете узнать все про оккультизм и эзотерику. Рубрики удобно расположены, а полезная информация в них составлена интересно и доступно для понимания. Ознакомьтесь с рубриками: гадания, знаки зодиака, обрядами, приметами, психологией, сонником или советами психолога.
займы онлайн без отказов · October 16, 2023 at 4:25 am
Планируя свой бизнес-стартап, я столкнулся с нехваткой средств. На сайте zaim52.ru я нашел информацию о лучших МФО 2023 года и смог взять займ [url=https://zaim52.ru/]займы онлайн на карту[/url] для развития своего предприятия. Это был ключевой шаг к успеху.
Alina · October 16, 2023 at 4:40 am
Kudos. Fantastic stuff.
составление сметы на ремонт · October 16, 2023 at 5:23 am
Дизайн и ремонт квартир remont-siti.ru
Делаем ремонт любой сложности высшего качества в Москве и по Московской области. Компания СК СИТИ СТРОЙ имеет огромный опыт стройки, проектирования, ремонта и рада представить свои услуги на интернет сайте remont-siti.ru уже сейчас. Заходите на следующий интернет ресурс и смотрите детали.
По вопросу [url=https://remont-siti.ru/tseny/]под ключ с материалами[/url] мы рады Вам оказать помощь. Если Вам требуется ремонт в Вашей квартире, или в только что приобретенной, новой, то Вы попали по верному адресу. Выполняем все типы ремонта, от простого чернового, до создания дизайн-проекта и осуществление работы под ключ. Работаем по всей столице и области. На сайте remont-siti.ru можно подсчитать цену и длительность работы за пару минут. Введите запрашиваемые параметры: площадь квартиры, вид жилья, необходимая скорость работы, тип строительных работ и другие и смотрите тут же предварительный ответ.
Работать с данной организацией весьма благоприятно, а также мы имеем череду преимуществ. Цена ремонта не изменится после его реализации. Многие компании, начав ремонтные работы называют одну сумму, которая после окончания работ умножается в несколько раз. Здесь такого не случится. Мы даем гарантию на все ремонтные работы в два года и устраним все недостатки, если вдруг они появятся, с огромным удовольствием. Мы начинаем работать без предоплаты, а оставшиеся материалы покупаем у вас, чтобы не захламлять Вашу кладовку ненужными вещами. Команда специалистов, которые имеют колоссальный опыт, постоянно проходят курсы повышения квалификации, чтобы понимать все новые технологии ремонта.
Если Вы искали [url=https://remont-siti.ru/]отделка квартир[/url] в сети интернет, то переходите на наш сайт и оформляйте заявку. Наш мастер приедет к Вам и рассчитает стоимость предстоящих работ. Цена зависит от сложности работы, строительных материалов, нужного вида работ и стиля квартиры. На сайте remont-siti.ru Вы сможете посмотреть таблицы установленных цен на разные виды работ. А также много уже выполненных вариантов можно посмотреть в нашей фото подборке.
Компания находится по адресу: г. Москва, ул. Новослободская, д. 20, к. 27, оф. 6. График работы с 9:00 до 21:00. Позвоните по контактному телефону +7(495)153-60-54 и задавайте любые возникшие вопросы.
chevaprino · October 16, 2023 at 6:40 am
On the website https://kenyabonus.com/ you can receive welcome bonuses and promotional codes for bets. A site with reviews of casinos and gaming platforms for betting on sports events with the best promotional codes for 2023!
легкий доступ к финансам · October 16, 2023 at 7:08 am
Однажды моя кофеварка сломалась, и я не мог представить свое утро без кофе. На все-займы-тут.рф я получил [url=https://все-займы-тут.рф/]займ на карту без отказа[/url] в 4000 рублей и купил новую. Теперь каждое утро начинается с ароматной чашки кофе!
Richardsen · October 16, 2023 at 7:59 am
[url=https://ozempik24.ru]оземпик 3 мл аптека[/url] – саксенда отзывы, купить оземпик +в москве +в наличии 3
milaMSaf · October 16, 2023 at 8:30 am
На сайте https://nova-51.ru/detskaya-stomatologiya-murmansk/ вы сможете узнать все о детской стоматологии в Мурманске, где мы вылечим молочные зубы, научим соблюдать гигиену полости рта, исправим прикус у детей. Все процедуры проходят в комфортной обстановке, врач друг для ребенка, к которому он будет с удовольствием приходить на прием. Обращайтесь! Полная информация на сайте.
StevenTic · October 16, 2023 at 9:17 am
[url=https://t.me/ozempicgg]препараты +для похудения[/url] – Оземпик в наличии аптеки, тирзепатид мунджаро купить
JamesVob · October 16, 2023 at 9:24 am
mexico drug stores pharmacies – medicines mexico – medication from mexico pharmacy
Porn sites online bptrends · October 16, 2023 at 9:35 am
Hello, I enjoy reading all of your post. I wanted to write a little comment to support you.
video frequency jammer · October 16, 2023 at 9:43 am
Hi there, just became alert to your blog through Google, and found that it is really informative.
I’m gonna watch out for brussels. I will be grateful if
you continue this in future. Numerous people will be benefited from your writing.
Cheers!
Feel free to visit my website – video frequency jammer
good · October 16, 2023 at 9:57 am
No matter if some one searches for his required thing,
therefore he/she wishes to be available that in detail,
thus that thing is maintained over here.
Feel free to visit my web blog :: good
Vincentoxymn · October 16, 2023 at 10:13 am
cymbalta purchase
перепланировка квартиры · October 16, 2023 at 12:28 pm
Составление сметы на ремонт квартиры Москва и Московская область remont-siti.ru
Осуществляем ремонт на любом этапе отличного качества в Москве и по Московской области. Компания СК СИТИ СТРОЙ имеет положительный опыт строительства, отделки, ремонта и рада представить свои услуги на веб сайте remont-siti.ru уже сейчас. Переходите на наш веб ресурс и смотрите детали.
По запросу [url=https://remont-siti.ru/]отделка квартир[/url] мы рады Вам помочь. Если Вам нужен ремонт в Вашей квартире, или в только что полученной, новой, то Вы пришли по верному адресу. Выполняем все типы ремонта, от начального чернового, до создания дизайн-проекта и выполнения работы под ключ. Работаем по всей Москве и области. На сайте remont-siti.ru можно подсчитать прайс и длительность работы за 1 минуту. Введите собственные габариты: площадь помещения, тип жилья, срочность, тип ремонтных работ и другие и получите тут же примерный ответ.
Сотрудничать с данной компанией весьма благоприятно, а также мы имеем ряд преимуществ. Цена ремонта не изменится после его завершения. Некоторые фирмы, начав ремонт называют одну цифру, которая после проведения работ увеличивается в пару раз. Здесь такого не будет. Мы даем гарантию на все ремонтные работы 2 года и поправим все недостатки, если вдруг они появятся, с огромным удовольствием. Мы начинаем работать без предоплаты, а оставшиеся материалы покупаем у вас, чтобы не захламлять Вашу кладовку ненужными вещами. Команда специалистов, которые имеют огромный опыт, постоянно проходят курсы повышения квалификации, чтобы знать все новые технологии ремонта.
Если Вы хотели найти [url=https://remont-siti.ru/tseny/]цены и сроки[/url] в сети интернет, то заходите на наш сайт и оформляйте заявку. Наш мастер приедет к Вам и посчитает стоимость предстоящих работ. Цена зависит от трудности работы, отделочных материалов, выбранного вида работ и стиля комнаты. На онлайн ресурсе remont-siti.ru Вы сможете найти таблицы установленных цен на разные виды работ. А ещё много уже готовых проектов можно увидеть в нашей фото подборке.
Найти нас можно по адресу: г. Москва, ул. Новослободская, д. 20, к. 27, оф. 6. Режим работы с 9:00 до 21:00. Звоните по контактному телефону +7(495)153-60-54 и задавайте любые оставшиеся вопросы.
elevaskimb · October 16, 2023 at 12:33 pm
На сайте https://avtolider40.ru/ оставьте заявку для того, чтобы записаться на занятия в автошколу. К ее важным преимуществам относят то, что здесь фиксированная стоимость, отсутствуют скрытые платежи. Есть возможность оплатить обучение в несколько этапов. Все инструкторы являются высококлассными специалистами, у которых огромный опыт работы. Они научат вас всему, а потому вы будете отлично водить автомобиль. График обучения составляется с учетом предпочтений, наличия свободного времени. Практикуется полное сопровождение.
onovaEMIPS · October 16, 2023 at 12:36 pm
На сайте https://businessua.com.ua/ представлены новости на тему бизнеса, экономики, культуры, недвижимости, рынка, криптовалюты. Все материалы свежие, актуальные, поэтому ознакомиться с ними необходимо всем. Также представлены статьи на тему бизнеса, криптовалюты. Здесь имеется все, что вам так интересно. И самое главное, что все новости, статьи составлены лучшими специалистами, которые находят материалы в открытых источниках. Заходите сюда регулярно, чтобы почерпнуть что-то для себя и рассказать друзьям.
aginabiobe · October 16, 2023 at 1:02 pm
На сайте https://villeroy-boch.pro вы сможете приобрести все, что необходимо для обустройства ванной комнаты, санузла: инсталляции, клавиши смыва, биде, унитазы, смесители, комфортную и практичную мебель. Все это произведено из качественных, высокотехнологичных материалов. Именно поэтому вся продукция прослужит длительное время, и на ней не появятся деформации. К преимуществам покупки на портале относят оперативную доставку, безупречный клиентский сервис, комфортную систему скидок.
сделать чеки на гостиницу в москве · October 16, 2023 at 1:18 pm
Hi, I do believe this is an excellent blog. I stumbledupon it 😉 I will return once again since I book-marked it. Money and freedom is the best way to change, may you be rich and continue to help other people.
vanovkib · October 16, 2023 at 1:33 pm
На сайте https://vun.com.ua/ изучите самые актуальные, свежие новости, которые будут интересны всем украинцам, без исключения. Имеются сведения про здоровье, о том, кто победит в боях, о том, когда выйдет трейлер к фильму. Много статей написано по теме политики. Есть мнения первых лиц государств, президента на счет ситуации на Украине. Обязательно посмотрите то, какая сегодня погода, а также ознакомьтесь с курсом валют. Регулярно на портале появляются свежие новости, с которыми необходимо ознакомиться всем.
vvladdip · October 16, 2023 at 1:38 pm
На сайте https://uavisti.com/ ознакомьтесь с актуальными, свежими новостями Украины. Они касаются политики, экономики, а также спецоперации. Все данные являются достоверными, честными, поэтому ориентируйтесь на них. Имеются не только полезные статьи, но и видеоматериалы, которые прольют свет на многие вопросы. Опубликованы сведения о культуре, спорте. Все это позволит понять то, что происходит на Украине в данный момент. Имеются обзоры и все то, что позволит сделать выводы о происходящем.
займ без отказов здесь · October 16, 2023 at 2:06 pm
Не так давно мне понадобилось 8000 рублей. В Яндексе я нашел все-займы-тут.рф. Честно говоря, я поражен удобством использования и огромным выбором МФО. Вся необходимая информация представлена ясно и доступно. Теперь я знаю, куда обратиться в случае финансовых неурядиц. Советую всем!
онлайн займы без отказов · October 16, 2023 at 2:17 pm
Когда моя машина сломалась, мне срочно понадобились деньги на ремонт. Благодаря сайту zaim52.ru и их подборке новых МФО 2023 года, я нашел выгодное предложение [url=https://zaim52.ru/]займы онлайн на карту[/url] и вернулся на дорогу быстро.
fatsomawebsites · October 16, 2023 at 2:28 pm
Hello, all is going well here and ofcourse every one is
sharing data, that’s truly fine, keep up writing.
Kristy · October 16, 2023 at 2:50 pm
%%
Stop by my web page: https://maps.google.bj/url?q=https%3A%2F%2Favsex6av.com%2F
magazinintimdestv · October 16, 2023 at 2:52 pm
[url=https://magazinintimdestv.vn.ua/]magazinintimdestv.vn.ua[/url]
Секс – це один буква головних относительный’єктів течение досягнення для оверлопількох людей. Завдяки регулярним тренуванням та справжнім інтимним провиантам можна забезпечити понад звичайний ярус сексуального задоволення.
magazinintimdestv.vn.ua
vleoniEconA · October 16, 2023 at 3:05 pm
На сайте https://myagkie-okna.spb.ru/ закажите функциональные и практичные мягкие окна, начиная от их производства, заканчивая проведением монтажных работ. Современные, инновационные конструкции помогут сохранить имущество от дождя, различных осадков, ветра. Прямо сейчас закажите бесплатный расчет непосредственно в день обращения. При необходимости мягкие окна выдержат различные перепады температуры, включая экстремально высокие. На работы предоставляются гарантии 12 месяцев.
JosephAnozy · October 16, 2023 at 3:11 pm
[url=https://kraken2trfqodidvlh.com/]kraken darknet[/url] – kraken darknet, kraken ссылка
sveti_boma · October 16, 2023 at 3:43 pm
купить трековые светильники https://novosvetum.ru/
Georgeknove · October 16, 2023 at 3:48 pm
На сайте https://centrua.com.ua/ имеется информация, которая касается политики, экономики, культуры, спецоперации и других важных направлений. Это авторитетное издание, которое предлагает ознакомиться только с честной информацией, которая будет вам полезна для расширения кругозора. Здесь также представлены и аналитические статьи, которые ответят на многие вопросы. Имеется интервью селебрити, популярных личностей, которые желают высказаться по поводу определенных проблем и того, что происходит в мире.
Tommiemyday · October 16, 2023 at 3:53 pm
medication from mexico pharmacy [url=http://mexicanpharmonline.shop/#]mexico online pharmacy[/url] mexico drug stores pharmacies
bloger_Nuh · October 16, 2023 at 3:54 pm
продвижение сторис
vakrisAutof · October 16, 2023 at 3:59 pm
На сайте https://meloman.me вы сможете найти приятную и красивую музыку, которая добавит вашему дню позитива, приятных и ярких эмоций. Все треки записаны в отличном качестве, у них четкий звук. Песни лирические, приятные, а потому доставят только положительные и приятные эмоции. Вы сможете скачать песни на любое устройство либо начать прослушивать их в режиме реального времени. Прослушивайте песни на смартфоне, компьютере или любом другом устройстве. Регулярно появляются новые песни, которые точно вам понравятся.
Jamesnoins · October 16, 2023 at 4:47 pm
На сайте https://auto-arenda-anapa.ru/ проверьте цены на прокат автомобилей в Анапе, чтобы прямо сейчас воспользоваться данной услугой. Компания не берет залога, отсутствуют ограничения. Вы сможете выбрать любой автомобиль, который подходит под ваши предпочтения и с учетом определенных технических характеристик. Стоимость автомобилей разная и зависит от того, на какое время вы хотите их арендовать. Некоторые автомобили можно арендовать только с водителем. Отсутствуют ограничения по пробегу, предоставляется детское кресло, регистратор.
daseSab · October 16, 2023 at 5:05 pm
На сайте https://xn—-7sbbppfjc7awwmj.xn--p1ai/ ознакомьтесь с каталогом скинали. Это фартуки, которые украшают зону на кухне. На портале вы сможете подобрать варианты в самом разном стиле, включая цветы, абстракции, интересные текстуры, природу, животных. Вся продукция выполнена из высококачественных, инновационных материалов, которые не потеряют своего изначального вида, лоска. Кроме того, они износостойкие, отличаются красивым дизайном. Важным моментом является то, что все скинали здесь профессиональные.
drozdinimb · October 16, 2023 at 6:15 pm
На сайте https://osvitanovyny.com/ ознакомьтесь с информацией, которая посвящена культуре, детям, а также семье. Очень много информации представлено на тему сохранения здоровья, о том, как выбрать профессию. Очень много контента на тему политики. Есть самые новые публикации на тему правильного питания, еды и того какая польза в зеленых овощах. Статьи созданы первоклассными авторами, которые отлично понимают в этих вопросах и предлагают вам расширить кругозор и повысить уровень знаний.
Robertdup · October 16, 2023 at 6:41 pm
увеличение губ москва https://prettywoman.kyiv.ua/ru/poleznye-sovety/sekrety-uvelicheniya-gub-kak-dobitsya-idealnyh-gub-bez-hirurgicheskogo-vmeshatelstva/
lovaTtot · October 16, 2023 at 6:46 pm
На сайте https://polskiezycie.pl/ почитайте интересную, актуальную и свежую информацию на самые разные темы. Имеются материалы на тему политики, экономики, бизнеса, технологий, спорта и многого другого. Каждая хозяйка узнает о том, как приготовить вкусное и полезное блюдо на обед для всей семьи. Также есть прогноз погоды на ближайшую неделю. Имеются новости о популярных личностях. Есть данные на тему строительства, проведения ремонтных работ. Обязательно ознакомьтесь с информацией, посвященной технологиям.
bespatetry · October 16, 2023 at 7:03 pm
На сайте https://uabusiness.com.ua/ вы узнаете полезную, ценную и актуальную информацию на тему бизнеса на Украине. Имеется конте, которые знают, какой контент ожидает публика. Эти новости понравятся всем, кто интересуется данной темой и независимо от социального положения. Также есть отдельная колонка с нт, который касается экономики, недвижимости, финансов, рынка, инвестиций, криптовалюты. Все статьи качественные, написаны настоящими профессионалами самыми последними новостями, которые произошли совсем недавно.
оформи займ без документов · October 16, 2023 at 7:15 pm
У меня появилась потрясающая идея для стартапа, но на реализацию понадобилось 30000 рублей. Я искал инвесторов в LinkedIn, но времени ждать не было. На все-займы-тут.рф я быстро получил необходимую сумму. Благодаря этому мой проект стартовал вовремя!
natevbumma · October 16, 2023 at 7:34 pm
На сайте https://vehrrxcso.ru попытайте свою удачу и сыграйте в интересные, любопытные игры прямо сейчас. Перед вами огромный выбор слотов, включая Dice, Mines, Bubbles, Wheel, Plinko, которые пользуются огромной популярностью среди любителей азарта. Ежедневно на сайт заходит огромное количество пользователей, которые, как и вы, мечтают попытать свою удачу в этой игре. Этот сервис предоставляет уникальную возможность заработать свой процент на реферальной программе. Ежедневный бонус – это 100 рублей.
Shani · October 16, 2023 at 7:48 pm
%%
Here is my web site … https://balita.org/
Robertdup · October 16, 2023 at 8:32 pm
Путь к успеху: эффективное SEO продвижение вашего сайта – https://sport-weekend.com/put-k-uspehu-jeffektivnoe-seo-prodvizhenie-vashego-sajta.htm
tamartex · October 16, 2023 at 9:07 pm
На сайте https://taker.website ознакомьтесь со слотами, интересными и любопытными играми, в которые сыграйте в данный момент. Вы сможете испытать свою удачу на любых автоматах. При этом большинство пользователей здесь выигрывают достаточно крупные суммы. Сервис ведет свою деятельность на максимально прозрачных и честных условиях, а потому вывести положенную сумму вы сможете в любое время. Также предусмотрена кнопка и для пополнения баланса. Посмотрите то, кто выиграл сегодня. Возможно, сегодня удача улыбнется вам!
AejKayzacfinnagt · October 16, 2023 at 10:05 pm
Best complex in Northern Cyprus [url=https://grand-sapphire-blu.com/]Grand Sapphire Blu[/url].
Anthonycap · October 16, 2023 at 10:42 pm
На сайте https://1novyny.com/ ознакомьтесь с актуальными новостями на тему политики, бизнеса, экономики, культуры, спорта. Здесь опубликованы действующие и эффективные лайфхаки, которые помогут вам приобрести именно то, что необходимо, не тратя лишних денег на ненужные покупки. Имеются статьи на тему войны, высказывания президента Украины и мнения первых лиц на ситуацию вокруг России и Украины. Для того чтобы вы лучше освоили информацию и нашли ту новость, которая важна в данный момент, весь контент поделен на специальные разделы.
matrasi_emaic · October 16, 2023 at 10:43 pm
ортопедический матрас https://ortopedicheskie-matrasi.ru/
aadsalNum · October 16, 2023 at 11:33 pm
На сайте https://ayaks-trening.ru/ ознакомьтесь с телефоном учебно-тренингового центра, который предпринимает все необходимое для того, чтобы повысить личную эффективность сотрудника. В компании вы сможете воспользоваться огромным спектром услуг: организовать тренинги, семинары, воспользоваться консалтингом, тимбилдингом. На профессиональном уровне и регулярно организуются выездные программы. В компании проходит индивидуальное консультирование, а также содержательные онлайн-тренинги. Компания находится на рынке более 15 лет, за которые выучила потребности клиентов.
rbunocrold · October 16, 2023 at 11:38 pm
На сайте https://worldbts.com/ получите всю необходимую, актуальную и свежую информацию на тему криптовалюты, биткоинов. Здесь вы сможете почитать материал о каждом виде криптовалюты, ее достоинствах и ознакомиться с другими важными моментами. Есть информация о криптовалюте в Грузии. Также имеются данные и о трейдинге. Опубликованы различные любопытные и интересные новости, которые важны для тех, кто интересуется этим направлением и желает побольше узнать об этой сфере. Регулярно публикуется новая информация, новости, которые помогут вам всегда быть в курсе всего происходящего.
azaresotte · October 17, 2023 at 12:02 am
На сайте https://newsfin.pl/ ознакомьтесь со свежими, актуальными новостями на тему недвижимости, финансов. Перед вами самые последние новости не только Польши, но и всего мира. Они сопровождаются красочными тематическими картинками, которые помогут лучше разобраться в теме. Ежедневно на сайте появляются новые данные, с которыми необходимо ознакомиться и вам. Все статьи составлены талантливыми авторами, которые выбирают самую суть, чтобы вы получили исчерпывающий ответ на свой вопрос.
evaanUtend · October 17, 2023 at 1:30 am
На сайте https://zoovet36.ru/ узнайте телефон ветеринарной клиники «Зоовет 36», где смогут вылечить ваше домашнее животное в 2 счета. Здесь есть цифровой рентген, а также собственная лаборатория, отдел ортопедии, хирургии. Вашему животному будет оказан весь надлежащий уход. Важным моментом является то, что в клинике принимают только врачи высшей категории. Они используют инновационные и уникальные препараты, высокотехнологичное оборудование, которое быстро определит причину недуга.
inogracok · October 17, 2023 at 1:37 am
На сайте http://semenagrad.ru вы сможете заказать семена почтой. Компания более 30 лет выращивает семена самых разных культур, чтобы предложить вам лучшее качество по доступной цене. Все семена отлично приживаются, потому как наделены безупречным качеством, они отборные и выдерживают различные погодные условия. С помощью «Семенаград» вы сможете обустроить свой участок или сад, посадить на нем различные культуры, чтобы затем получить богатый урожай. Перед вами огромный ассортимент, что позволит подобрать семена, исходя из предпочтений.
Любовь на расстоянии одного микрозайма · October 17, 2023 at 2:33 am
Любовь к природе была со мной всегда. Я мечтал заморозить моменты ее великолепия, чтобы потом возвращаться к ним в холодные зимние вечера. Но каждый фотограф знает, что секрет хорошего снимка – не только в умении ловить момент, но и в качественном оборудовании. Моя старая камера уже не справлялась с задачами, и мне отчаянно нужен был новый фотоаппарат. Но как быть, если в кармане дырка, а до зарплаты еще две недели?
Как в анекдоте, ответ пришел сам – я вспомнил о сайте [url=https://mikro-zaim-online.ru/]mikro-zaim-online.ru[/url]. Через короткое время я уже оформлял онлайн-заявку на сумму 30 000 рублей. О, как просто и понятно было весь процесс! И как быстро пришло одобрение! Это было почти волшебством.
С новеньким фотоаппаратом я почувствовал себя настоящим магом. Каждый клик затвора запечатлевал невероятные пейзажи, уходящие солнца, туманные рассветы. Я словно открыл для себя новый мир, полный цветов, света и теней.
Под каждым кустом, на каждом дереве, в каждом луче света скрывалась своя маленькая вселенная, и теперь у меня был инструмент, чтобы открыть все эти тайны. Я путешествовал по окрестным лесам, полям, вел по берегам рек, делая снимки, которые раньше мог только мечтать создать.
Спасибо, [url=https://mikro-zaim-online.ru/]mikro-zaim-online.ru[/url], за это чудо! Теперь у меня не только замечательный фотоаппарат, но и бесценный опыт, подаренный каждым сделанным снимком. Если бы не этот сайт, я бы так и остался с мечтами о красивых фотографиях природы, не сумев их реализовать. Теперь я знаю: мечты сбываются, и иногда для их осуществления достаточно всего лишь знать, где искать помощь.
magazinintimdestv · October 17, 2023 at 2:45 am
[url=https://magazinintimdestv.vn.ua/]magazinintimdestv.vn.ua[/url]
Секс – це один з головних относительный’єктів досягнення для палубаількох людей. Завдяки регулярним тренуванням та вот справжнібуква інтимним провиантам можна забезпечити понад звичайний уровень сексапильного задоволення.
magazinintimdestv.vn.ua
ntinbuLanna · October 17, 2023 at 3:06 am
На сайте https://bashni.pro ознакомьтесь с самыми популярными новостройками, которые находятся в Приморском крае. Для того чтобы подобрать лучший вариант, необходимо обозначить город, а также улицу. Кроме того, следует выяснить, какой вариант вы предпочитаете – с отделкой либо без. Также обозначьте стоимость, на которую вы рассчитываете, и площадь. На сайте вы найдете и нужные новости, если вы интересуетесь данной темой. Также на портале представлены и видеоматериалы, которые ответят на многочисленные вопросы.
Michaelmoild · October 17, 2023 at 3:08 am
[url=https://kraken4ssylka.com/]ссылка на кракен в тор[/url] – ссылка на кракен в тор, kraken ссылка
MarioPow · October 17, 2023 at 3:21 am
A pharmacy that keeps up with the times. http://mexicanpharmonline.com/# п»їbest mexican online pharmacies
mexican mail order pharmacies [url=http://mexicanpharmonline.shop/#]mexico pharmacy online[/url] mexico pharmacies prescription drugs
JeremyNeema · October 17, 2023 at 3:58 am
Stumbled upon a unique article, I suggest you take a look https://www.party.biz/forums/15/gossip/topic-create
ревизионные люки · October 17, 2023 at 4:10 am
Hi, I desire to subscribe for this web site to take latest updates,
therefore where can i do it please assist.
oliibloTep · October 17, 2023 at 4:16 am
На сайте https://rybalka-ohota.com.ua/ ознакомьтесь с контентом, который посвящен охоте и рыбалке. Здесь находятся новости как любительского, так и профессионального промысла. Есть самые последние данные относительно того, как проходит рыбалка, охота в разных регионах. Так вы узнаете и о том, что в Калифорнии планируется расстрел диких оленей. Имеются отдельные разделы «Охота», «Оружие», «Рыбалка». Опубликованы вкусные, полезные и простые в приготовлении блюда, которые можно приготовить на природе.
magazinintimdestv · October 17, 2023 at 4:28 am
[url=https://magazinintimdestv.vn.ua/]magazinintimdestv.vn.ua[/url]
Секс – це цифра з головних об’єктіна досягнення чтобы оверлопількох людей. Завдяки регулярним тренуванням та справжнім інтимним провиантам можна забезпечити понад звичайний ярус сексуального задоволення.
magazinintimdestv.vn.ua
dentitox pro review · October 17, 2023 at 4:58 am
This post will assist the internet people for creating new webpage or even a weblog from start to end.
ubbotAmady · October 17, 2023 at 5:18 am
На сайте https://krasotulia.com.ua/ почитайте интересные и увлекательные статьи на самую разную тему, включая моду, здоровье, материалы о знаменитостях, также есть рецензии к различным фильмам, новинкам, которые будут интересны и вам. Имеются материалы о культуре: литература, искусство, история. Этот сайт станет вашим надежным проводником в мир интересной, свежей информации. Заходите сюда регулярно, чтобы получить информацию о своей стране. Все статьи составлены высококлассными авторами, которые отлично понимают в данной теме.
elevntoits · October 17, 2023 at 5:33 am
На сайте https://xn--36-6kcao3cdj.xn--p1ai/ вы сможете приобрести мангалы, которые представлены здесь в огромном количестве. Также здесь находятся и грили, барбекю, шампуры, коптильни, решетки и многое другое. Кроме того, есть возможность заказать различные печи самого разного размера и под казан. Присутствуют и подарочные наборы. Для того чтобы иметь представление о том, как все работает и какого качества, необходимо посмотреть видео. Вся продукция выполнена из качественного, надежного и практичного материала, который не теряет своих технических свойств.
JamesVob · October 17, 2023 at 5:54 am
mexican rx online – mexico pharmacy – best online pharmacies in mexico
shini_Onete · October 17, 2023 at 5:55 am
зимние шины https://zimnie-shini-avto.ru/
Russellreoto · October 17, 2023 at 6:13 am
bata4d
Clint · October 17, 2023 at 6:17 am
Many thanks, Wonderful stuff.
https://moviestreamerfree.newbigblog.com/28206963/an-unbiased-view-of-watch-videos-for-free · October 17, 2023 at 6:22 am
Aw, this was an exceptionally nice post. Taking a few minutes and
actual effort to make a very good article… but what can I say…
I put things off a whole lot and don’t manage to get nearly anything
done.
nnaefrfumma · October 17, 2023 at 6:36 am
На сайте https://kuzov43.ru/ ознакомьтесь с телефоном популярной компании, которая в течение длительного времени и на профессиональном уровне занимается кузовным ремонтом. Высококлассные специалисты ремонтируют микроавтобусы, грузовые, легковые автомобили. Есть возможность воспользоваться ремонтом в рассрочку, восстановить геометрию кузова, выполнить покраску автомобиля. Все это по доступным и привлекательным ценам. Также получится выполнить и ремонт вмятин без покраски. В работе применяется исключительно качественный и инновационный материал, инструмент, который никогда не подводит и помогает получить необходимый результат.
https://freemoviesv.bligblogging.com/22993745/facts-about-movie-websites-revealed · October 17, 2023 at 6:56 am
Howdy just wanted to give you a brief heads up and let you
know a few of the images aren’t loading correctly.
I’m not sure why but I think its a linking issue.
I’ve tried it in two different internet browsers and both show the same outcome.
otaposuevy · October 17, 2023 at 1:46 pm
На сайте https://mybitcoin.xyz/ вы сможете получить знания на тему блокчейна, высоких технологий, о биткоине. Кроме того, вы узнаете много информации о криптовалюте, которая потребуется тем, кто только начинает познавать данную сферу. Перед вами список тем, доступных для изучения. Вы узнаете об основах криптографии, о введении в блокчейн. Обязательно необходимо изучить информацию на тему того, как работает транзакция. Изучите материалы на тему криптовалютных кошельков. Ознакомьтесь с данными о майнинге.
Edmundo · October 17, 2023 at 4:56 pm
With thanks. I value this!
ovajaKen · October 17, 2023 at 6:55 pm
На сайте https://interesnews.com/ изучите интересные новости, которые касаются любопытных историй, здоровья, культуры, науки, животных, космоса и пространства. Есть колонка, которая называется «Странные новости», где выкладывается все очень необычное, что происходит в мире. Выкладываются фотографии артефактов, видеоматериалы. Есть любопытные данные о софе, которая считается оптимальным выбором для тех, кто желает спать с комфортом. Есть интересная информация по поводу планеты Земля.
JeffreyEnrok · October 17, 2023 at 7:44 pm
Stumbled upon interesting material – I can’t help but recommend you to read http://newsbeautiful.ru/elitnyie-devushki-sankt-peterburga/
Tommiemyday · October 17, 2023 at 9:18 pm
purple pharmacy mexico price list [url=http://mexicanpharmonline.shop/#]mexican drugstore[/url] medicine in mexico pharmacies
Insurance company for auto · October 17, 2023 at 9:25 pm
I’m not sure where you are getting your information, but good topic.
I needs to spend some time learning much more or understanding more.
Thanks for fantastic info I was looking for this information Insurance company for auto
my mission.
online television · October 17, 2023 at 11:25 pm
I was able to find good information from your blog posts.
TPEリアルドール · October 18, 2023 at 12:56 am
Genuinely when someone doesn’t know afterward its up to other
users that they will help, so here it takes place.
Aurora · October 18, 2023 at 1:30 am
%%
Also visit my webpage – https://www.toylex.org
aliimeSax · October 18, 2023 at 1:42 am
На сайте https://freelancework.ru/ вы сможете зарегистрироваться в качестве фрилансера либо найти высококлассного специалиста для выполнения различных работ. Воспользуйтесь всем функционалом сайта: создайте новый заказ, ознакомьтесь с имеющимися заказами, подберите идеального исполнителя и изучите тарифы. Почитайте информацию, которая касается правильного пользования ресурсом. Работайте только с лучшими исполнителями, которые входят в топ. Для того чтобы получить доступ ко всем опциям, пройдите регистрацию либо авторизуйтесь.
AejKadppcfinnagt · October 18, 2023 at 1:47 am
Very good site for [url=https://bitcoin-price-usd2.org/]Bitcoin Price USD[/url].
Мой опыт использования займов для учебы · October 18, 2023 at 2:20 am
Хотел сделать сюрприз жене на годовщину свадьбы, но финансы были ограничены. Нужно было 20 000 рублей. На [url=https://mikro-zaim-online.ru/]mikro-zaim-online.ru[/url] я нашел идеальное решение.
Я просто выбрал МФО с акцией на микрозаймы без процентов, заполнил форму на сайте и получил деньги. Жена была в восторге от подарка, а я – от сервиса.
zaicerag · October 18, 2023 at 2:32 am
На сайте https://glamurnews.com/ вы получите всю нужную информацию о селебрити, популярных личностях. Есть познавательные статьи на тему красоты, моды и многого другого. Они точно вызовут интерес у всех, кто интересуется данной темой. Есть примеры идеальных завтраков, которые помогут поддержать здоровье, не набрать лишних килограммов и всегда оставаться в тонусе. Все статьи очень интересные, познавательные, взяты из проверенных источников, а потому обязательно принесут пользу. На сайте представлена только подлинная информация, в правдивости которой не сомневайтесь.
Robertdup · October 18, 2023 at 3:36 am
https://bankslist.ru/
evavafes · October 18, 2023 at 3:46 am
На сайте https://vestistroyki.com/ вы сможете ознакомиться с самыми последними новостями из мира строительства. Этот портал посвящен актуальным тенденциям, а также инновациям в этой сфере. Основной принцип издания – предоставить читателям наиболее полную и полезную информацию, которая пригодится при проведении разноплановых работ. В компании работают лучшие журналисты, авторы, которые стремятся расширить ваш кругозор. Они дают важные рекомендации и ценят каждого читателя, чтобы предложить действительно стоящий материал.
Josette · October 18, 2023 at 3:51 am
%%
My web page – https://amazonki.net/dyskusje/read.php?271,403564
MarioPow · October 18, 2023 at 4:10 am
I love the convenient location of this pharmacy. http://mexicanpharmonline.shop/# medication from mexico pharmacy
medication from mexico pharmacy [url=https://mexicanpharmonline.com/#]mexican drugstore[/url] reputable mexican pharmacies online
Abncdc · October 18, 2023 at 4:57 am
buy pamelor 25mg buy pamelor paypal anacin order online
erkushelepe · October 18, 2023 at 5:18 am
На сайте https://www.oriservice.ru/ ознакомьтесь с информацией, посвященной компании Орифлейм. Здесь вы узнаете о том, как бесплатно зарегистрироваться, что для этого необходимо сделать. При этом каждая женщина сможет не только заниматься своим любимым делом, но и заказывать товары с хорошей скидкой и по лучшей стоимости. Заказывайте товары не только себе, но и своим родственникам, знакомым, друзьям. Орифлейм дарит отличную возможность заработка и покупки косметики для себя и со скидкой.
Andrewtoday · October 18, 2023 at 5:32 am
blangkon slot
Blangkon slot adalah situs slot gacor dan judi slot online gacor hari ini mudah menang. Blangkonslot menyediakan semua permainan slot gacor dan judi online terbaik seperti, slot online gacor, live casino, judi bola/sportbook, poker online, togel online, sabung ayam dll. Hanya dengan 1 user id kamu sudah bisa bermain semua permainan yang sudah di sediakan situs terbaik BLANGKON SLOT. Selain itu, kamu juga tidak usah ragu lagi untuk bergabung dengan kami situs judi online terbesar dan terpercaya yang akan membayar berapapun kemenangan kamu.
The Hype Magazine · October 18, 2023 at 5:37 am
Hi there, just became aware of your blog through Google, and found that it’s really informative.
I am going to watch out for brussels. I’ll appreciate if you
continue this in future. Lots of people will be benefited from your writing.
Cheers!
KennethNuake · October 18, 2023 at 5:38 am
1881 hoki
UK Online Casinos · October 18, 2023 at 6:06 am
I’ve learn some good stuff here. Certainly price bookmarking
for revisiting. I wonder how much attempt you set to create any such magnificent informative
site.
oloveNence · October 18, 2023 at 6:24 am
На сайте https://123film.pro/ вы сможете посмотреть фильмы, новинки сериалов, мультики. Также есть и популярные произведения, которые вам захочется пересматривать раз за разом. Имеются фильмы и сериалы разных жанров: комедии, ужасы, исторические, документальные. Вы сможете воспользоваться фильтром для того, чтобы отсортировать произведения по году и стране выпуска. Среди огромного выбора вы точно подберете вариант, исходя из своих предпочтений и вкуса. Все фильмы в безупречном качестве, с хорошим и четким звуком, а потому точно произведут впечатление.
JamesVob · October 18, 2023 at 6:29 am
mexican online pharmacies prescription drugs or mexico pharmacy – buying prescription drugs in mexico
fominTaini · October 18, 2023 at 7:16 am
На сайте https://narcoalco.ru вы сможете получить консультацию относительно лечения, а также реабилитации зависимых. В клинике вам будет предложен полный спектр всех необходимых услуг, включая вывод из наркотической, алкогольной зависимости. В обязательном порядке оказывается психологическая поддержка во время социальной адаптации. Компания активно работает, в том числе, и с несовершеннолетними. По России представлено более 6 центров. Зависимые лечатся по революционной технологии.
allua.bizamoMS · October 18, 2023 at 8:08 am
На сайте https://allua.biz/ представлены актуальные и свежие новости главных событий, экономики, политики, бизнеса, науки, технологии и многое другое. Также здесь освещаются последние новости об Украине. На сайте вы получите оперативную и достоверную информацию из всех областей жизни общества. Регулярно посещая данный ресурс, вы можете быть точно уверены, что не пропустите ни одно событие из страны и мира. Все рубрики сгруппированы, что значительно облегчает поиск необходимой информации.
Voronalack · October 18, 2023 at 8:13 am
На сайте https://newscrypto.net/ изучите актуальные, свежие новости, которые посвящены криптовалюте, майнингу. Для того чтобы подобрать определенную тему, необходимо воспользоваться специальным навигатором по сайту. Имеются такие разделы, как: «Анализы», «Маркет», «Майнинг», «Новости», «Технологии», «Трейдинг». Весь контент сопровождается интересными и цветными картинками для наглядности. Над материалом работают лучшие авторы, которые знают, какую информацию вам предоставить. Регулярно появляются свежие данные.
QQSLOT228 · October 18, 2023 at 8:32 am
You are so awesome! I do not believe I’ve read something like that before.
So nice to find someone with original thoughts on this topic.
Seriously.. thanks for starting this up. This site is something that’s
needed on the web, someone with a little originality!
Gordondeatt · October 18, 2023 at 8:43 am
[url=https://blacksprut.support/]зеркало onion блэкспрут[/url] – ссылка на blacksprut darknet, как зайти на Блэкспрут
ousovrog · October 18, 2023 at 9:48 am
На сайте https://play.google.com/store/apps/details?id=com.wildhearts.challengegame&hl=ru&gl=ru вы сможете сделать ставки на спорт в популярной конторе «Фонбет», которая предлагает огромный выбор спортивных состязаний на любой вкус. Ежедневно предлагается огромное количество вариантов ставок на самые разные спортивные состязания. Вам доступны высокие коэффициенты, предлагаются бонусы для каждого игрока. У вас получится пополнить счет абсолютно безопасно, после чего вывести средства.
渋谷ハプバー · October 18, 2023 at 10:19 am
Hey! Do you know if they make any plugins to help with Search Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but I’m
not seeing very good results. If you know of any please share.
Cheers!
reevahoume · October 18, 2023 at 11:12 am
На сайте https://play.google.com/store/apps/details?id=com.SkyyG01fff вы сможете сделать свои ставки в БК «Лига ставок», которую основали в 2008 году. Компания считается легальным букмекером, который осуществляет свою деятельность на территории России. Букмекер радует своей лояльностью и особым подходом к ведению бизнеса. Каждый пользователь получает возможность воспользоваться всем функционалом ресурса, чтобы не только заработать денег, но и получить положительные эмоции. Это официальный партнер РПЛ.
onovaGal · October 18, 2023 at 11:17 am
На сайте http://smartporog.ru можно заказать автоматические пороги по приемлемой цене. Сертифицированное производство с гарантией качества позволяет компании быть лучшей из крупнейших поставщиков порогов на ранке по всей территории РФ. Пороги, приобретенные здесь, подходят на двери из разного материала. Доставка по России осуществляется бесплатно. На сайте есть возможность ознакомиться с каталогом, а также сделать заказ по телефону. Оптовым покупателям предоставляются специальные цены.
KennethSix · October 18, 2023 at 11:29 am
[url=https://mounjaro-ozempic.com]оземпик купить +в алматы[/url] – тирзепатид цена +в аптеке, семаглутид 14 купить
Mimosa Hostiles Root Bark USA · October 18, 2023 at 11:33 am
I used to be able to find good advice from your articles.
KevinWhori · October 18, 2023 at 11:40 am
магазин наркошоп
AejKadpwcfinnagt · October 18, 2023 at 12:05 pm
Всем очень рекомендую [url=https://lev-casino.website/]Лев казино[/url].
eroniktog · October 18, 2023 at 12:36 pm
На сайте https://remont.kr.ua/ изучите полезную, нужную и интересную информацию на тему строительства, недвижимости, ремонта, рынка. Здесь только ценные, информативные данные, с которыми необходимо ознакомиться и вам. Есть информация о долларе, о том, сколько сейчас он стоит и на сколько подорожал за последний день. Для того чтобы быстро сориентироваться в контенте все статьи поделены на рубрики. При необходимости вы всегда сможете воспользоваться специальным поиском, что значительно упростит выбор.
calendario 2024 para imprimir pdf gratis · October 18, 2023 at 12:39 pm
Wow, marvelous blog layout! How long have you been blogging for?
you make blogging look easy. The overall look of your website is
excellent, let alone the content!
Have a look at my webpage; calendario 2024 para imprimir pdf gratis
aritaPEdigh · October 18, 2023 at 12:44 pm
На сайте https://koppst.kr.ua/ получите важную информацию на тему, касающуюся агроправа, агробизнеса, фермерского хозяйства. Так вы узнаете о том, что в этом году на Украине было собрано рекордное количество гречки, про долю зарубежной свинины на рынке. Все статьи поделены на рубрики, что позволит отсортировать ненужную информацию и узнать только то, что действительно интересует в данный момент. Имеется информация, касающаяся местной продукции. Вы узнаете, почему подорожала молочная продукция.
arakarpap · October 18, 2023 at 1:12 pm
На сайте https://fakty.org/ вы сможете ознакомиться с самыми последними данными на тему экономики, здоровья, культуры, науки. Также можете взять контакты редакции. Есть информация на тему того, что происходит сейчас на Украине. Имеются любопытные и информативные статьи на тему экономики, бизнеса, а также криминала. Публикуются мнения первых лиц, а также ключевых фигур, которые ответят вам на многочисленные вопросы. Их мнения очень важны, ведь они подскажут вам много интересного, актуального, о чем вы еще не знали.
shini_viess · October 18, 2023 at 2:11 pm
летние шины r17 https://letnie-shini-avto.ru/
Floydvok · October 18, 2023 at 2:25 pm
Discovered an article that might interest you – don’t miss it! http://collie.fatbb.ru/viewtopic.php?f=18&t=3721
seevyUnary · October 18, 2023 at 2:29 pm
На сайте http://waltzprof.com можно заказать стальной профиль в большом ассортименте. Также здесь есть автоматические выкидные пороги, уплотнители и скрытые петли собственного производства. Компания применяет только современные автоматизированные линии для изготовления качественных, стальных профилей. Есть возможность оформить розничный или оптовый заказ на выгодных условиях. А покупка от производителя – это верное решение экономии на услугах посредника. Если остались вопросы, перезвоните на сайт и менеджеры проконсультируют вас.
Cierra · October 18, 2023 at 2:40 pm
Don’t miss out on the possibility to unwind and take pleasure in your favourite flavors – make your reservation immediately!
LaverneTew · October 18, 2023 at 2:54 pm
На сайте https://garant-plus.ru/ представлены объекты недвижимости, которые вы сможете приобрести прямо сейчас. Агентство недвижимости «Гарант Плюс» предлагает свои услуги по сдаче, приобретению, аренде недвижимости в Москве и по области. Кроме того, есть возможность заказать дополнительные услуги. К примеру: оформление в собственность, подведение газа, различных коммуникаций, сбор документов для того, чтобы согласовать строительство, получить разрешение на ввод зданий. Компания работает с 1988 года, чтобы чувствовали себя максимально комфортно.
Kennethben · October 18, 2023 at 3:03 pm
[url=https://xn--80aaldytyc.xn--80adxhks]трулисити похудела отзывы[/url] – дулаглутид инструкция +по применению аналоги, Оземпик красный купить с доставкой
kovazdic · October 18, 2023 at 3:07 pm
На сайте https://xakertop.net/topic/110/page-6 вы сможете воспользоваться высококлассными услугами профессиональных хакеров. Они смогут с легкостью взломать электронную почту, выполнить детализацию СМС. Специалисты работают в данной сфере длительное время, а потому справятся с задачей независимо от ее сложности. При этом вас обрадуют привлекательные расценки. Результат вы получите в минимальные сроки. Специалисты смогут взломать социальные сети, а также получить все необходимые пароли.
Robertjibra · October 18, 2023 at 3:49 pm
[url=https://mega-market.sbs]как зайти на мега[/url] – ссылка на мега в тор, мега дарк нет
ermakopiele · October 18, 2023 at 4:38 pm
На сайте https://teplyy-pol77.ru/ заполните заявку для того, чтобы рассчитать цену установки теплого пола. Он позволит вам создать в доме необходимую атмосферу. Всего за 24 часа вы сможете получить качественное, надежное покрытие, которое позволит себя чувствовать комфортно. Теплый пол даст возможность вам сэкономить на отоплении, во время монтажа не потребуется стяжка. Предоставляются гарантии 15 лет. Нет магнитного поля, а потому покрытие является полностью безопасным. В компании можно заказать проектирование, оборудование, монтаж.
aninaJasse · October 18, 2023 at 5:16 pm
На сайте https://svitzaxoplen.kr.ua/ вы сможете почитать любопытные, интересные данные, которые касаются правильного питания, того, как поддержать здоровье в определенном возрасте. Диетологи определили доступный способ, который поможет скинуть вес без лишних мучений. В разделе находится огромное количество полезной, годной информации, которая прольет свет на многие вопросы. Статьи написаны медиками, первоклассными специалистами, которые готовы предоставить исчерпывающую информацию.
vgenric · October 18, 2023 at 5:41 pm
На сайте https://xn--80aaelrmlfr9a.su/ получите ценную и актуальную информацию о пневматике, ее правильной покупке, профессиональном и качественном обслуживании, проведении ремонтных работ. Вы почерпнете для себя очень много полезной информации, которая будет необходима, если у вас есть пневматика. Также имеется контент о боеприпасах, ремонте и апгрейде. Для того чтобы подыскать подходящий материал, необходимо воспользоваться поиском. Есть раздел со свежими записями от лучших и квалифицированных авторов.
vanatsiz · October 18, 2023 at 5:45 pm
в заказах которые ты по всей видимосчти без меня отправлял часто попадается “от Николая”
joycasinozendoc · October 18, 2023 at 5:53 pm
[url=https://joycasinozendoc.com/]joycasinozendoc.com[/url]
Canadians looking on the side of an intoxicating and dependable online gaming trial lack look no advance than JoyCasino. This cutting-edge casino boasts an stimulating range of video slots including titles from Quickspin, Habanero, Genesis, 1×2, Decrease Gaming, Pragmatic Play, iSoftBet, Push Gaming, Iron Dog Studio, and Yggdrasil.
joycasinozendoc.com
rovadialunc · October 18, 2023 at 6:23 pm
На сайте https://aviator2023.su/ сыграйте в популярную игру «Авиатор». Это инновационная игра нового поколения, которая поможет вам получить деньги. Если вертолет долетит до самой вершины, то вы получите большую сумму денег и сможете потратить ее на свои нужды. Вы сможете воспользоваться новым типом геймплея. При этом вы получите только приятные и положительные впечатления от игры. Она с каждым годом только набирает популярность из-за того, что в случае выигрыша вы действительно получите деньги, к тому же обрадует и простой интерфейс.
Pedroinvinia · October 18, 2023 at 6:29 pm
allopurinol generika bestellen
ovajacog · October 18, 2023 at 7:10 pm
На сайте https://shemi-otopleniya.ru/ почитайте информацию о гибкой подводке, которая произведена из нержавеющей стали. Она представлена на сайте самой разной модификации и диаметра, что позволит подобрать вариант, исходя из требований, особенностей производства. Также на сайте вы сможете ознакомиться со всей необходимой информацией по поводу гибкой подводки. Вся продукция создается из качественных материалов, выполнена по ГОСТу, она сертифицированная. Для того чтобы подобрать то, что необходимо, воспользуйтесь специальным фильтром.
phv condo apartment · October 18, 2023 at 7:10 pm
It’s actually a nice and helpful piece of info. I’m glad
that you shared this useful info with us. Please stay us informed like this.
Thank you for sharing.
vleonSourl · October 18, 2023 at 8:07 pm
На сайте https://intimpitera.com вы сможете ознакомиться с удивительными красотками, которые жаждут общения со своим господином. Они невероятно привлекательные, сексуальные и раскрепощенные, а потому смогут привести в восторг любого мужчину. И самое главное, что дамы ухоженного и привлекательного вида. У них подтянутая, спортивная фигура, которая понравится даже эстету. У девушек мягкие, нежные руки, они станцуют стриптиз и обрадуют своими эротическими играми. Есть возможность снять даму на час или несколько.
DanielKam · October 18, 2023 at 8:24 pm
rikvip
ovamaHic · October 18, 2023 at 8:57 pm
На сайте https://vezuviy.shop/ есть возможность заказать фирменное печное оборудование и дымоходы с высоким качеством гарантии. Если желаете иметь собственный коттедж, либо подыскиваете печь для создания идеального температурного решения, в онлайн-маркете вы найдете то, что вам нужно. Грамотная консультация специалистов даст подробные описания к использованию и установке приборов. Также на сайте есть каталог, с которым можно ознакомиться и подобрать интересующую технику. Клиентам предоставляются выгодные акции и сезонные бонусы.
adovaMem · October 18, 2023 at 9:48 pm
На сайте https://cryptoinfor.com/ изучите исчерпывающую информацию, которая касается криптовалюты. Есть качественные, свежие новости, которые помогут получить ответы на многие вопросы. Так вы узнаете о том, какая самая популярная криптовалюта и за какой из них будущее. Ежедневно на сайте появляется новая информация, с которой будет интересно ознакомиться и вам, если вы хотите узнать побольше о криптовалюте. Вся информация подается в простой и понятной форме, а потому вы ее точно усвоите.
dyson_rhymn · October 18, 2023 at 10:45 pm
фен стайлер дайсон https://dyson-stylery.com/
Chriswef · October 18, 2023 at 10:47 pm
http://studentnet.ru
AejKadpacfinnagt · October 18, 2023 at 10:55 pm
Nestled in the heart of Dubai Silicon Oasis [url=https://ellington-views.ae/]Ellington Views[/url]
azaroinide · October 18, 2023 at 11:12 pm
На сайте https://play.google.com/store/apps/details?id=com.sportsl1des.riughtimes сделайте ставки в популярной БК «Леон», которая предлагает огромный выбор развлечений на самый взыскательный вкус. Для того чтобы начать игру, необходимо пополнить счет. Вы сможете вывести бонус сразу же после отыгрыша. Если депозит большой, то в этом случае и бонус будет соответствующим. Регулярно выплачиваются средства, а потому вы можете быть уверены в том, что все выигранные деньги будут вам переведены.
상품권소액결제 · October 18, 2023 at 11:38 pm
It’s the best time to make some plans for the future and it’s time to be happy.
I have read this post and if I could I desire to suggest you some interesting things or suggestions.
Maybe you could write next articles referring to this article.
I want to read more things about it!
Tommiemyday · October 18, 2023 at 11:39 pm
mexico pharmacies prescription drugs [url=https://mexicanpharmonline.com/#]mexican pharmacy online[/url] mexican rx online
Chriswef · October 18, 2023 at 11:50 pm
http://seobuxzilla.ru
Chriswef · October 18, 2023 at 11:50 pm
http://help-to-students.ru
Robertmaw · October 19, 2023 at 12:00 am
[url=https://xn--80alrehlr.xn--p1acf/]семаглутид +в россии[/url] – семаглутид уколы купить, саксенда цена +в москве
vatatnew · October 19, 2023 at 12:14 am
На сайте https://vipprokat42.ru/ вы сможете ознакомиться с любыми видами автотранспорта. Вашему вниманию предлагается огромный выбор моделей качественных авто по лояльным ценам. Вы можете взять машину с персональным водителем либо заказать машину на праздники. Для того чтобы выполнить сделку заказа, необходимо найти подходящее автомобильное средство и заполнить форму онлайн. Здесь есть возможность оплаты различными способами. Помимо прочего, постоянным клиентам предлагаются бонусы, подарки и скидки.
elkovSon · October 19, 2023 at 12:44 am
На сайте https://xn--e1afajie1bv.xn--p1ai/ ознакомьтесь с продукцией компании «ХИМТЕК», которая производит не окисленные полиэтиленовые воски при помощи каталитической деструкции полимеров. Компания считается единственной в России, которая работает таким методом. Вы также найдете огромное количество актуальных тематических новостей, которые обязательно вас заинтересуют. Если и вас заинтересовало предложение, то заполните форму ниже, чтобы связаться. Обязательно ознакомьтесь с нормативными документами.
юрист по мошенничеству в Москве · October 19, 2023 at 1:37 am
Адвокат по экономическим делам advokat-karbanov.ru
Никогда не известно, когда может пригодиться помощь адвоката. Поэтому, хотим представить Вам адвокатское бюро Карбанов и партнеры, которое оказывает все виды юридических услуг. На сайте advokat-karbanov.ru Вы найдете все подробности, список услуг, контакты.
По части [url=https://advokat-karbanov.ru/advokat-po-arbitrazhnyem-delam/]адвокат по арбитражным делам[/url] Вы попали по верному адресу. Пётр Карбанов – главный управляющий партнер нашей компании, известный эксперт на тв и радио. Адвокат, который может разрешить практически любые юридические задачи. Также у нас опытная сильная команда, занимающаяся делами какого угодно характера.
Позвоните на нашу горячую линию по номеру телефона +7(925)734-30-70 или закажите обратный звонок на сайте advokat-karbanov.ru уже сейчас. Оставьте свой номер и имя и мы Вам тут же перезвоним. Либо можно списаться с нами в известных мессенджерах. Наша команда имеет большой опыт в своем деле, ведь только образования не хватит, главное это опыт в жизни. Ещё на стадии знакомства с Вашим делом, наши специалисты способны понять его перспективы и вероятный итог.
Если Вы планировали найти [url=https://advokat-karbanov.ru/advokat-po-arbitrazhnyem-delam/]адвокат по арбитражным делам[/url] в сети интернет, то прямо сейчас заходите на наш веб ресурс. Там Вы увидите полный список наших услуг. Конкретнее: адвокат по гражданским делам, защита прав потребителей, жилищный юрист, трудовые споры, автоюрист, наследственные споры, исполнительное производство, земельные споры, взыскание долгов и многое другое.
Мы расположены по адресу: 115088, Москва, ул. Угрешская, д.2, стр.1, оф. 403. Работаем пошагово: для начала необходимо оформить заявку или осуществить звонок нам. Далее мы выбираем дату и время консультации, которая для Вас будет бесплатной. Согласование юридической позиции по вашему вопросу и обсуждение цены услуг, оформление договора, подготовка документации и представительство в суде. Действуем строго по плану и настраиваемся только на успешный итог по делу. Приходите и мы обязательно Вам окажем помощь.
JamesVob · October 19, 2023 at 1:55 am
mexico drug stores pharmacies and mail order pharmacy mexico – mexican drugstore online
Zaimolpres · October 19, 2023 at 2:12 am
Внезапная медицинская ситуация заставила меня искать деньги. С помощью сайта zaim52.ru и их отличной подборки МФО 2023 года, я быстро получил займ [url=https://zaim52.ru/]займы онлайн на карту[/url], что сэкономило моё время и нервы.
MarioPow · October 19, 2023 at 2:18 am
They set the tone for international pharmaceutical excellence. http://mexicanpharmonline.shop/# mexico drug stores pharmacies
mexican pharmaceuticals online [url=http://mexicanpharmonline.shop/#]medicines mexico[/url] reputable mexican pharmacies online
Chriswef · October 19, 2023 at 2:20 am
http://referats-economy.ru
CharlesNen · October 19, 2023 at 2:39 am
mexico pharmacies prescription drugs or mexico pharmacy – best online pharmacies in mexico
nstanclurl · October 19, 2023 at 2:45 am
На сайте https://globalpolitics.info/ изучите интересные, актуальные политические новости США. Также здесь есть и данные про европейскую политику, экстремизм, бизнес и многое другое. Все данные взяты из открытых источников, контент составлен первоклассными специалистами, которые понимают в теме и стремятся предоставить информацию в простой и понятной форме, чтобы материал был понятен всем. Вы узнаете о том, какие перспективы у США. Регулярно публикуется новая информация, которая поможет понять многое.
RemenAcarm · October 19, 2023 at 3:20 am
На сайте https://aptekamos.ru/ вбейте название лекарства для того, чтобы заказать его в ближайшей аптеке. Здесь также вы ознакомитесь с ассортиментом, а также расценками. Имеются и телефоны, адреса аптек. Изучите список аптек, которые предлагают оперативную доставку. Имеются такие заведения, которые работают в круглосуточном режиме. Предоставляется актуальная и свежая информация. Если и вы ищите какое-либо лекарство, то обязательно найдете его на этом портале. Почитайте последние новости, которые будут для вас полезны.
Suvorzinia · October 19, 2023 at 3:23 am
На сайте https://bigkurs.ru/ вы сможете выбрать самые популярные онлайн-курсы, которые будут полезны всем, кто желает освоить актуальную профессию и больше зарабатывать. Перед вами огромное количество курсов, которые вы сможете приобрести прямо сейчас и по привлекательным ценам. Регулярно появляются выгодные предложения, чтобы вы купили курсы по оптимальной стоимости и от самых разных школ. Имеются курсы по аналитике, психологии и другим дисциплинам. Так вы сможете освоить новую профессию, получить знания, которые обязательно вам пригодятся.
ykovaUsent · October 19, 2023 at 3:33 am
На сайте http://bt-futures.ru/ вы узнаете подробную информацию для трейдера, а также интересные данные о том, как трейдеру научится больше зарабатывать и не перегореть. Здесь есть очень много нужного и полезного материала о финансовой системе. Чтобы погрузиться в рынок, нужно пройти изучение и использовать эффективные стратегии, об этом подробнее вы узнаете на сайте, где нужно пройти в соответствующий раздел. Также на портале есть возможность пройти этапы, по которым можно увеличить свою рентабельность от трейдинга в 2 – 3 раза.
category porn · October 19, 2023 at 3:38 am
category porn
ovvlablove · October 19, 2023 at 3:58 am
На сайте https://stolycia.com.ua/ вы сможете получить всю нужную информацию об экономике, бизнесе, медицине, здоровье и многом другом. Имеются данные о культуре. Есть и новые статьи, с которыми необходимо ознакомиться всем, кто проживает на Украине и переживает за свою страну. Имеется информация, которая касается транспорта и инфраструктуры. Вы ознакомитесь со всеми свежими данными, которые публикуются квалифицированными специалистами. Регулярно на сайте выкладываются новые статьи, которые прольют свет на многочисленные вопросы.
JamesEnamp · October 19, 2023 at 4:24 am
[url=https://m3qa.gl]m3ga gl[/url] – mega sb зеркало сайта, mega sb darknet
joycasinozendoc · October 19, 2023 at 6:14 am
[url=https://joycasinozendoc.com/]joycasinozendoc.com[/url]
Canadians looking on the side of an intoxicating and trusty online gaming exposure shortage look no forward than JoyCasino. This cutting-edge casino boasts an stimulating collection of video slots including titles from Quickspin, Habanero, Genesis, 1×2, Reduce Gaming, Pragmatic Have a good time, iSoftBet, Induce Gaming, Iron Dog Studio, and Yggdrasil.
joycasinozendoc.com
Kevinhawic · October 19, 2023 at 6:25 am
[url=https://mego.hn]mega sb зеркало[/url] – mega доступ ограничен, mega доступ ограничен
matrasi_Stima · October 19, 2023 at 6:27 am
матрас купить в москве недорого https://matrasi-shop.ru/
varaisfoF · October 19, 2023 at 7:04 am
На сайте http://smotrikinohd.ru вы найдете интересное и качественное кино. Здесь есть больше 30 тыс. фильмов и сериалов онлайн разных жанров, времен и народов. Команда проекта регулярно следит за обновлением фильмов и постоянно добавляет картины, чтобы пользователи могли наслаждаться лучшими мировыми шедеврами. На сайте есть удобный поиск, с помощью которого можно быстро отыскать необходимый фильм. Здесь каждый найдет что-то интересное для себя, а главное это то, что можно смотреть фильмы без регистрации и отправки смс!
vallabib · October 19, 2023 at 7:12 am
На сайте https://myserial.one/?my=1 вы отыщите популярные, а также новые сериалы. Для того чтобы подобрать подходящий вариант, необходимо воспользоваться фильтром по году, жанру. Есть топ сериалов, которые вызывают интерес у большинства. Все фильмы представлены в безупречном качестве, с хорошим звуком. Их сюжет затягивает, а потому возникает желание их пересматривать постоянно. Ежедневно сериалы обновляются, чтобы предложить вам лучшее. Выбирайте киносериал в зависимости от настроения. Пересматривайте фильмы после работы либо в выходной день.
outback durham · October 19, 2023 at 7:32 am
wonderful post, very informative. I ponder why the other specialists of this sector don’t realize this.
You must continue your writing. I’m sure, you have a great readers’ base already!
my blog post – outback durham
Chriswef · October 19, 2023 at 7:39 am
http://vog-logistic.ru
best mlm · October 19, 2023 at 7:42 am
Hello, for all time i used to check blog posts
here in the early hours in the daylight, because i love to
gain knowledge of more and more.
laevdciz · October 19, 2023 at 7:50 am
На сайте http://elekspb.ru вы сможете приобрести судовой кабель, судовую электротехнику с регистром и многое другое. «ЭЛЕК» считается наиболее популярным предприятием, которое не перестает развиваться. Оно активно поставляет материалы, а также электрооборудование. Вся продукция создана по ГОСТу, является сертифицированной, качественной, а потому никогда не подведет. Для того чтобы проконсультироваться, необходимо позвонить по обозначенному телефону. Таким же образом сделайте заказ.
NAALI2 · October 19, 2023 at 7:59 am
I’m really enjoying the design and layout of your blog.
It’s a very easy on the eyes which makes it much more enjoyable
for me to come here and visit more often. Did you hire out a developer to create your theme?
Great work!
joycasinozendoc · October 19, 2023 at 8:03 am
[url=https://joycasinozendoc.com/]joycasinozendoc.com[/url]
Canadians looking for an exciting and honest online gaming exposure lack look no further than JoyCasino. This cutting-edge casino boasts an provocative collection of video slots including titles from Quickspin, Habanero, Genesis, 1×2, Relax Gaming, Pragmatic Act, iSoftBet, Induce Gaming, Iron Dog Studio, and Yggdrasil.
joycasinozendoc.com
Chriswef · October 19, 2023 at 8:13 am
http://1001referatik.ru
selivHig · October 19, 2023 at 8:23 am
На сайте https://dominfor.com/ изучите полезную, качественную информацию, которая касается ведения хозяйства, а также ремонта и других моментов. Вы узнаете о том, как правильно обрезать малину и многое другое, что позволит получить хороший урожай. Имеются данные на тему экономики, политики, мнения первых лиц и многое другое, что позволит расширить кругозор и получить более содержательную информацию. Также опубликован контент на тему политики, экономики, финансов. Статьи написаны высококлассными специалистами, которые готовы предоставить важную информацию всем желающим.
Chriswef · October 19, 2023 at 8:23 am
http://novgorod-diplom.ru
Llcqlg · October 19, 2023 at 8:31 am
orlistat tablet purchase orlistat sale order diltiazem
DoyleFrano · October 19, 2023 at 8:32 am
bocor88
bocor88
AejKvdadcfinnagt · October 19, 2023 at 8:38 am
[url=https://kovrovye-dorozhki-1.ru/]Ковровая дорожка[/url] для уюта вашего дома
cleaning_rhymn · October 19, 2023 at 9:31 am
клининг москва рейтинг https://cleaning-rating-2023.ru/
inovevhycle · October 19, 2023 at 9:38 am
На сайте https://ukrinfor.com/ вы получите актуальную, нужную информацию на различную тематику: медицина, культура, наука, политика, технологии, спорт. Все статьи очень интересные, увлекательные и понравятся всем, кто отслеживает информацию о своей родной стране. Кроме того, имеются видеоматериалы от ключевых фигур, популярных личностей, которые играют на Украине огромную роль. Все статьи сопровождаются цветными картинками, видеоматериалами, которые помогут лучше понять ситуацию.
HedvaDsertdup · October 19, 2023 at 9:38 am
Рекомендую [url=https://kovry-tureckie-1.ru/]Турецкие ковры[/url] высшего качества.
asiaaBiz · October 19, 2023 at 10:32 am
На сайте https://costaprestige.com/ ознакомьтесь с объектами недвижимости, среди которых: роскошные виллы, таунхаусы, пентхаусы, виллы, дома на первой линии. Испанское агентство недвижимости предлагает приобрести дома на лучших курортах: Пуэрто Банус, Марбелья, Эстепона. Здесь представлены только элитные апартаменты для тех, кто ценит комфорт, удобство и изысканный дизайн. На испанском побережье находятся чистые пляжи, всегда царит отличная погода и приятный климат. Здесь вы сможете ознакомиться и с эксклюзивными вариантами недвижимости.
yubovpaype · October 19, 2023 at 11:52 am
На сайте https://www.we-wed.ru вы получите всю необходимую информацию об организации свадеб под ключ. Команда профессионалов с вниманием к деталям и с экономией вашего бюджета сделают свадьбу неповторимой. Фотографы, видеографы, стилисты – и все это в команде работающей быстро и с пожеланиями заказчика. Если нужно узнать точную стоимость торжества, необходимо отправить форму и свадебный менеджер оперативно свяжется. Свадебное агентство все заботы по организации торжества возьмет на себя.
адвокат по семейным делам · October 19, 2023 at 12:16 pm
Карбанов и партнеры advokat-karbanov.ru
Никогда не известно, когда может понадобиться помощь юриста. Поэтому, хотим представить Вам адвокатское бюро Карбанов и партнеры, которое оказывает все разновидности юридических услуг. На интернет ресурсе advokat-karbanov.ru Вы найдете все детали, каталог услуг, контактные данные.
По части [url=https://advokat-karbanov.ru/advokat-po-ugolovnym-delam/]уголовный адвокат[/url] Вы попали по верному адресу. Пётр Карбанов – главный управляющий партнер нашего бюро, постоянный эксперт на тв и радио. Адвокат, который может разрешить практически любые юридические вопросы. Ещё у нас опытная сильная команда, занимающаяся делами какого угодно характера.
Позвоните на нашу горячую линию по номеру телефона +7(925)734-30-70 или оформите обратный звонок на сайте advokat-karbanov.ru уже сейчас. Оставьте свой номер и имя и мы Вам тут же перезвоним. Либо можно связаться с нами в популярных мессенджерах. Наша команда имеет большой опыт в данном деле, ведь только образования не хватит, главное это опыт в жизни. Ещё на этапе ознакомления с Вашим делом, наши адвокаты способны понять его перспективы и вероятный исход.
Если Вы хотели найти [url=https://advokat-karbanov.ru/advokat-po-arbitrazhnyem-delam/]юрист по арбитражным спорам[/url] в интернете, то прямо сейчас переходите на наш онлайн портал. Там Вы увидите весь список наших услуг. Конкретнее: адвокат по гражданским делам, неосновательное обогащение, адвокат по семейным делам, трудовые споры, автоюрист, наследственные споры, исполнительное производство, земельные споры, взыскание долгов и многое другое.
Находимся по адресу: 115088, Москва, ул. Угрешская, д.2, стр.1, оф. 403. Работаем пошагово: для начала нужно оформить заявку или сделать звонок нам. Далее мы выбираем дату и время консультации, которая для Вас будет бесплатной. Согласование юридической позиции по вашему вопросу и озвучивание стоимости услуг, заключение договора, подготовка документации и представительство в суде. Действуем строго по плану и настраиваемся только на положительный итог по делу. Приходите и мы обязательно Вам окажем помощь.
fuck girl · October 19, 2023 at 12:36 pm
fuck girl
GeorgeWex · October 19, 2023 at 1:00 pm
Found a captivating read that I’d like to recommend to you http://comedyforme.ru/vash-gid-po-obsluzhivaniyu-i-remontu-avtomobiley
arturDaway · October 19, 2023 at 1:10 pm
На сайте https://vipprokat42.ru/ оставьте заявку для того, чтобы взять в аренду автомобиль высокого класса. В автопарке только новые, исправные иномарки, в салоне которых всегда чисто, ухоженно. Взять автомобиль вы сможете в любое время. Для этого необходимо лишь договориться с менеджером. В обязательном порядке заключается договор. Все услуги предоставляются по привлекательным расценкам, а потому арендовать авто получится на любой срок. Клиентам представляются различные бонусы, действуют акции, для постоянных заказчиков действуют особые условия.
DoyleFrano · October 19, 2023 at 1:41 pm
winstarbet
winstarbet
najanSax · October 19, 2023 at 2:02 pm
На сайте https://play.google.com/store/apps/details?id=com.destroyerhrh32 вы сможете сделать свои ставки в известной БК, которая работает на легальной основе, а ставки принимает в мобильном приложении и более чем на 25 видов спортивных состязаний. Но главный упор сделан на хоккей, футбол, баскетбол, теннис, американский футбол. А вот другие дисциплины не так распространены. Перед вами следующие игровые события: автогол, дубль, пенальти. Вы обязательно получите на руки свои выигранные средства.
wellness · October 19, 2023 at 2:29 pm
I loved as much as you’ll receive carried out right here.
The sketch is attractive, your authored material stylish.
nonetheless, you command get bought an nervousness over that you wish be
delivering the following. unwell unquestionably come further formerly again since exactly the same nearly very often inside case you shield this hike.
whatsapp marketing · October 19, 2023 at 2:45 pm
Hey There. I discovered your blog the use of msn. This is an extremely smartly
written article. I will make sure to bookmark it and come
back to read extra of your useful information. Thank you for the post.
I will definitely comeback.
HedeaDsertdup · October 19, 2023 at 2:46 pm
Лучшая [url=https://cinovki-kupit-1.ru/]Цинковка[/url] у нас.
Harrisonoxymn · October 19, 2023 at 3:08 pm
geodon 20mg online
Chriswef · October 19, 2023 at 3:23 pm
http://migseo.ru
uzminaponi · October 19, 2023 at 3:52 pm
На сайте http://best-audio-books.ru вы сможете ознакомиться с самыми лучшими аудиокнигами, которые можно слушать ежедневно. Они представлены на любой вкус. И самое важное, что скачивать их можно абсолютно бесплатно и на любое устройство, в отличном качестве. Здесь книги самых популярных авторов, которые вызовут интерес у каждого. Ознакомьтесь с самыми свежими записями, которые добавлены совсем недавно и перепишите произведения на свое устройство. Также опубликованы и свежие комментарии. Для того чтобы подыскать определенную книгу, необходимо ознакомиться с архивами по месяцам.
free Live Sex Porn · October 19, 2023 at 4:32 pm
Its such as you read my mind! You appear to know a lot approximately this, like you wrote the guide in it or something.
I think that you just could do with some % to
power the message home a bit, but other than that, that is wonderful blog.
An excellent read. I’ll definitely be back.
naleksHog · October 19, 2023 at 5:20 pm
На сайте https://lovely-professional.ru представлена продукция для наращивания ресниц от проверенных производителей. Купить товары для ресниц можно по низкой цене и с гарантией качества. В каталоге можно найти инструменты для ресниц, клей, косметические средства по восстановлению и уходу бровей и ресниц. Клиентам предлагаются постоянные акции. Широкий ассортимент, конкурентные цены и быстрая обработка – основные критерии интернет-магазина. Оставьте заявку и консультанты помогут подобрать для вас необходимый товар.
JasonBlumn · October 19, 2023 at 5:23 pm
Mestres Místicos é o maior portal de Tarot Online do Brasil e Portugal, o site conta com os melhores Místicos online, tarólogos, cartomantes, videntes, sacerdotes, 24 horas online para fazer sua consulta de tarot pago por minuto via chat ao vivo, temos mais de 700 mil atendimentos e estamos no ar desde 2011
porsche redwood city · October 19, 2023 at 5:32 pm
Hi there, just became aware of your blog through Google, and found that it is truly informative.
I am gonna watch out for brussels. I’ll be grateful if you
continue this in future. Lots of people will be benefited from your
writing. Cheers!
my site: porsche redwood city
Sex · October 19, 2023 at 5:53 pm
Aw, this was a really nice post. Spending some time and actual effort to make a superb article… but what can I say… I hesitate a lot and never seem to get anything done.
vaLyudDaugh · October 19, 2023 at 5:56 pm
На сайте https://coininfor.com/ ознакомьтесь с новостями криптовалютного мира, узнайте прогноз. Весь контент поделен на разделы, чтобы вы быстро сориентировались в доступном материале и ознакомились с тем, что вам действительно интересно. Имеется информация о биржах и о том, как ими правильно пользоваться, какие новшества произошли за последнее время. Обязательно изучите контент, касающийся новых высоких технологий. Вам будут интересны прогнозы, а также аналитические данные. Очень много новостей на эту тему и про майнеров.
erovajadly · October 19, 2023 at 6:35 pm
На сайте http://bt-futures.ru/ вы получите всю необходимую и актуальную информацию, которая касается бинарных опционов, криптовалютных бирж. Есть полезные данные и о том, как трейдеру начать больше зарабатывать. На сайте находится очень много важного, нужного материала, который будет полезен как новичкам, так и опытным специалистам, которые постоянно развиваются и стремятся всегда быть в курсе последних новостей. Здесь только нужные, актуальные данные, которые помогут лучше разбираться в выбранной сфере.
avrencob · October 19, 2023 at 6:43 pm
На сайте https://auto-arenda-anapa.ru/ возьмите в аренду автомобиль в Анапе. Не потребуются залоги, отсутствуют ограничения. Для того чтобы проверить расценки, необходимо ввести то, в какое время вы планируете взять автомобиль, а также момент окончания аренды. Перед вами большой выбор машин различного класса и уровня. В компании только иномарки. Напротив каждого автомобиля указана стоимость, дополнительная информация, чтобы вы быстро сориентировались в выборе. Каждому клиенту с ребенком предоставляется детское кресло.
HedeaDdertdup · October 19, 2023 at 6:57 pm
Лучший [url=https://avtoservice-skoda-5.ru/]автосервис шкода[/url] у нас.
murmeLip · October 20, 2023 at 7:35 am
На сайте https://play.google.com/store/apps/details?id=com.destroyerhrh32 вы сможете сыграть в классическую игру, связанную с уничтожением платформ. Это аркадная игра, которая отличается непредсказуемым, интересным сюжетом. Игрокам нужно будет управлять платформой, а также разрушать блоки, перемещать их поочередно – вправо и влево. Смекалка, тактика и сноровка помогут не пропустить мяч. По мере того, как будете продвигаться, турниры будут все сложнее, а путь – мощнее. Собирайте бонусы, что позволит вам стать сильнее.
Онлайн казино · October 20, 2023 at 10:26 am
I like it when folks come together and share thoughts. Great blog, keep it up!
naHohSow · October 20, 2023 at 12:45 pm
На сайте https://play.google.com/store/apps/details?id=com.slotsonl1ne.onl1ne5l0t5 поиграйте в казино, прочувствуйте эту удивительную атмосферу. Перед вами огромное количество слотов, а также увлекательных азартных игр, которые принесут положительные эмоции. Здесь получится сыграть абсолютно бесплатно и даже получить реальные впечатления. И самое важное, что поиграть можно в любое время, ведь такая игра представлена в мобильном телефоне. Получайте приятные впечатления, даже если вы находитесь в пробке, в очереди.
Cathleen · October 20, 2023 at 6:45 pm
%%
Check out my web blog :: http://bigbamboooyna.com/
Онлайн казино · October 20, 2023 at 9:42 pm
Hi, i think that i saw you visited my web site so i got here to go back the want?.I am trying to in finding things to improve my site!I assume its ok to use some of your concepts!!
Williamkax · October 21, 2023 at 8:15 am
supermoney88
supermoney88
Tentang SUPERMONEY88: Situs Game Online Deposit Pulsa Terbaik 2020 di Indonesia
Di era digital seperti sekarang, perjudian online telah menjadi pilihan hiburan yang populer. Terutama di Indonesia, SUPERMONEY88 telah menjadi pelopor dalam dunia game online. Dengan fokus pada deposit pulsa dan berbagai jenis permainan judi, kami telah menjadi situs game online terbaik tahun 2020 di Indonesia.
Agen Game Online Terlengkap:
Kami bangga menjadi tujuan utama Anda untuk segala bentuk taruhan mesin game online. Di SUPERMONEY88, Anda dapat menemukan beragam permainan, termasuk game bola Sportsbook, live casino online, poker online, dan banyak jenis taruhan lainnya yang wajib Anda coba. Hanya dengan mendaftar 1 ID, Anda dapat memainkan seluruh permainan judi yang tersedia. Kami adalah situs slot online terbaik yang menawarkan pilihan permainan terlengkap.
Lisensi Resmi dan Keamanan Terbaik:
Keamanan adalah prioritas utama kami. SUPERMONEY88 adalah agen game online berlisensi resmi dari PAGCOR (Philippine Amusement Gaming Corporation). Lisensi ini menunjukkan komitmen kami untuk menyediakan lingkungan perjudian yang aman dan adil. Kami didukung oleh server hosting berkualitas tinggi yang memastikan akses cepat dan keamanan sistem dengan metode enkripsi terkini di dunia.
Deposit Pulsa dengan Potongan Terendah:
Kami memahami betapa pentingnya kenyamanan dalam melakukan deposit. Itulah mengapa kami memungkinkan Anda untuk melakukan deposit pulsa dengan potongan terendah dibandingkan dengan situs game online lainnya. Kami menerima deposit pulsa dari XL dan Telkomsel, serta melalui E-Wallet seperti OVO, Gopay, Dana, atau melalui minimarket seperti Indomaret dan Alfamart. Kemudahan ini menjadikan SUPERMONEY88 sebagai salah satu situs GAME ONLINE PULSA terbesar di Indonesia.
Agen Game Online SBOBET Terpercaya:
Kami dikenal sebagai agen game online SBOBET terpercaya yang selalu membayar kemenangan para member. SBOBET adalah perusahaan taruhan olahraga terkemuka dengan beragam pilihan olahraga seperti sepak bola, basket, tenis, hoki, dan banyak lainnya. SUPERMONEY88 adalah jawaban terbaik jika Anda mencari agen SBOBET yang dapat dipercayai. Selain SBOBET, kami juga menyediakan CMD365, Song88, UBOBET, dan lainnya. Ini menjadikan kami sebagai bandar agen game online bola terbaik sepanjang masa.
Game Casino Langsung (Live Casino) Online:
Jika Anda suka pengalaman bermain di kasino fisik, kami punya solusi. SUPERMONEY88 menyediakan jenis permainan judi live casino online. Anda dapat menikmati game seperti baccarat, dragon tiger, blackjack, sic bo, dan lainnya secara langsung. Semua permainan disiarkan secara LIVE, sehingga Anda dapat merasakan atmosfer kasino dari kenyamanan rumah Anda.
Game Poker Online Terlengkap:
Poker adalah permainan strategi yang menantang, dan kami menyediakan berbagai jenis permainan poker online. SUPERMONEY88 adalah bandar game poker online terlengkap di Indonesia. Mulai dari Texas Hold’em, BlackJack, Domino QQ, BandarQ, hingga AduQ, semua permainan poker favorit tersedia di sini.
Promo Menarik dan Layanan Pelanggan Terbaik:
Kami juga menawarkan banyak promo menarik yang bisa Anda nikmati saat bermain, termasuk promo parlay, bonus deposit harian, cashback, dan rollingan mingguan. Tim Customer Service kami yang profesional dan siap membantu Anda 24/7 melalui Live Chat, WhatsApp, Facebook, dan media sosial lainnya.
Jadi, jangan ragu lagi! Bergabunglah dengan SUPERMONEY88 sekarang dan nikmati pengalaman perjudian online terbaik di Indonesia.
amontvoile · October 21, 2023 at 9:15 am
На сайте https://play.google.com/store/apps/details?id=com.wildhearts.challengegame&hl=ru&gl=ru вы сможете сделать ставки на самые разные спортивные состязания и ежедневно. Вас ожидают высокие коэффициенты, а также регулярно выдаются бонусы. Есть возможность безопасно пополнять счет, а о ваших финансовых операциях никто не узнает. Важным преимуществом является то, что этот сервис предоставляет обслуживание высокого качества. Все ставки принимаются в режиме онлайн. Здесь вас ожидает понятный интерфейс.
Furfurfriend · October 21, 2023 at 1:53 pm
Navigating through the myriad of tech gadgets available online can be overwhelming. However, if you’re looking specifically for a reliable and feature-packed wearable, you might want to [url=https://furfurfriend.com/collections/smart-watches]buy smart watches[/url] from our curated collection. Each piece is engineered to provide a seamless blend of style, functionality, and convenience, ensuring that you’re always connected and in control.
In an era where every minute counts, having immediate access to your notifications, emails, and health metrics can be a game-changer. If you’re a tech enthusiast looking to explore a world where innovation meets elegance, opting to [url=https://furfurfriend.com/collections/smart-watches]smart watch buy online[/url] is your ticket to a realm of unmatched convenience.
Our smartwatches are equipped with features that cater to a wide range of needs. Whether you’re a fitness aficionado seeking to track your progress, a busy professional needing to stay on top of your schedule, or simply someone who values the blend of style and technology, we have something for you.
Step into a world where every detail is designed with your convenience in mind. Explore, choose, and step into the future of connectivity, health, and style. Your perfect companion, encapsulating the pinnacle of technological innovation and aesthetic design, awaits at the click of a button.
mebeldomyar · October 23, 2023 at 2:21 am
[url=https://mebeldom-yar.ru/]mebeldom-yar.ru[/url]
Наша уклон – организации концепций сохранения сверху лоджиях и балконах в течение Москве. Сверху личном производстве изготавливаем красивую, прочную и высокофункциональную мебель числом индивидуальным параметрам.
mebeldom-yar.ru
Kevinhig · October 23, 2023 at 7:27 am
RuneScape, a beloved online gaming world for many, offers a myriad of opportunities for players to amass wealth and power within the game. While earning RuneScape Gold (RS3 or OSRS GP) through gameplay is undoubtedly a rewarding experience, some players seek a more convenient and streamlined path to enhancing their RuneScape journey. In this article, we explore the advantages of purchasing OSRS Gold and how it can elevate your RuneScape adventure to new heights.
A Shortcut to Success:
a. Boosting Character Power:
In the world of RuneScape, character strength is significantly influenced by the equipment they wield and their skill levels. Acquiring top-tier gear and leveling up skills often requires time and effort. Purchasing OSRS Gold allows players to expedite this process and empower their characters with the best equipment available.
b. Tackling Formidable Foes:
RuneScape is replete with challenging monsters and bosses. With the advantage of enhanced gear and skills, players can confidently confront these formidable adversaries, secure victories, and reap the rewards that follow. OSRS Gold can be the key to overcoming daunting challenges.
c. Questing with Ease:
Many RuneScape quests present complex puzzles and trials. By purchasing OSRS Gold, players can eliminate resource-gathering and level-grinding barriers, making quests smoother and more enjoyable. It’s all about focusing on the adventure, not the grind.
Expanding Possibilities:
d. Rare Items and Valuable Equipment:
The RuneScape world is rich with rare and coveted items. By acquiring OSRS Gold, players can gain access to these valuable assets. Rare armor, powerful weapons, and other coveted equipment can be yours, enhancing your character’s capabilities and opening up new gameplay experiences.
e. Participating in Limited-Time Events:
RuneScape often features limited-time in-game events with exclusive rewards. Having OSRS Gold at your disposal allows you to fully embrace these events, purchase unique items, and partake in memorable experiences that may not be available to others.
Conclusion:
Purchasing OSRS Gold undoubtedly offers RuneScape players a convenient shortcut to success. By empowering characters with superior gear and skills, players can take on any challenge the game throws their way. Furthermore, the ability to purchase rare items and participate in exclusive events enhances the overall gaming experience, providing new dimensions to explore within the RuneScape universe. While earning gold through gameplay remains a cherished aspect of RuneScape, buying OSRS Gold can make your journey even more enjoyable, rewarding, and satisfying. So, embark on your adventure, equip your character, and conquer RuneScape with the power of OSRS Gold.
erenfjut · October 23, 2023 at 2:51 pm
If you want to know about events and entertainment in Las Vegas, then you will be pleased to visit the website https://2023.vegas/ where you will see the schedule of all current and upcoming events in Las Vegas in 2023. You’ll find your favorite events and can choose great seats and buy tickets to upcoming events at the lowest prices.
evavewek · October 23, 2023 at 5:19 pm
На сайте https://prometall.shop/ представлена информация о полном комплексе услуг по печам. Здесь можно приобрести чугунную печь от производителя по доступной цене. Клиенты компании могут рассчитывать на многие дополнительные услуги, которые касаются банного оборудования и отопления. Также предлагаются скидки и интересные предложения. На сайте есть возможность ознакомиться с каталогом и услугами. Печи компании имеют отличные рекомендации. Цены вас приятно удивят.
Kevinhig · October 24, 2023 at 7:13 am
lô đề online
lshakogen · October 24, 2023 at 8:03 am
Visit https://michaeljacksononetickets.com/ to find the best Michael Jackson ONE by Cirque du Soleil ticket prices, showtimes and more. The Michael Jackson Music Show in Lac Vegas is a unique show with dancing and acrobatics. Don’t miss the opportunity to visit it.
jannaFisee · October 25, 2023 at 3:51 am
На сайте https://kranpioner77.ru/ вы сможете ознакомиться с кранами Пионер, а также арендовать краны по приемлемой цене. Возможна установка других опций, например, колес для перемещения, дополнительного тормоза для лебедки, увеличения глубины опускания. В продаже имеется краны Пионер БУ, полностью исправные и готовые к работе. Все характеристики и цены вы сможете узнать на сайте.
🎁 Get free iPhone 15: https://relproservices.in/upload/go.php 🎁 hs=6f6111ed7ac81bda2d4ea62e12f87c5c* · October 25, 2023 at 6:58 am
xni56k
liseesmelp · October 25, 2023 at 8:44 pm
На сайте http://moy-dompersonal.ru/ можно оставить заявку на подбор персонала сейчас, и познакомиться с соискателями уже завтра. Агентство недвижимости поможет сэкономить недели на поиске нужного человека. Больше не нужно искать няню либо водителя по знакомым, все эти люди есть в базе. Вам всего лишь нужно отправить заявку. Сроки и условия гарантии зависят от тарифов, с которыми можно ознакомиться на сайте. Если вам нужно лично провести отбор, свяжитесь с менеджерами по телефону и опишите задачу, после чего получите анкету.
сделать чеки на гостиницу в москве · October 26, 2023 at 12:11 am
Hi there, I found your website via Google even as searching for a similar matter, your web site got here up, it seems to be good. I have bookmarked it in my google bookmarks.
ritamihvat · October 27, 2023 at 3:45 pm
On the website https://ovegas.show/ buy guaranteed seats with the best prices for the water show from Cirque du Soleil. Schedule, tickets for the water masterpiece, seating chart – all this is on our website. Don’t miss out on this unique opportunity to attend this event only in Bellagio, Las Vegas.
rteresmure · October 29, 2023 at 1:49 am
На сайте https://vpolshe.com/vnzh-v-polshe-karta-czasowego-pobytu/ есть возможность получить консультацию о подаче документов на карту побыту в Польше. Компания занимается подготовкой и подачей пакета документов для получения карты побыту. Персональный подход к вашей ситуацией гарантирован. Для получения карты побыта в Польше, вам достаточно связаться с опытными специалистами компании, для того чтобы они подобрали для вас и вашей семьи оптимальный вариант легализации. На сайте вы можете увидеть отзывы клиентов компании.
digital breathalyzer alcohol tester · October 29, 2023 at 3:10 am
Hi there, I desire to subscribe for this website to
get most up-to-date updates, thus where can i do it please help out.
Here is my homepage; digital breathalyzer alcohol tester
Qiyoga · October 29, 2023 at 4:39 am
imitrex order order levaquin 250mg pills how to buy avodart
сделать чек на гостиницу · October 29, 2023 at 8:00 am
Howdy! This is my first visit to your blog! We are a group of volunteers and starting a new initiative in a community in the same niche. Your blog provided us valuable information to work on. You have done a marvellous job!
Elliotteurog · October 29, 2023 at 6:55 pm
https://telegra.ph/Ч—Ч©Ч¤Ч Ч™Ч•ЧЄ-10-29-92
nnapaSloca · October 29, 2023 at 7:40 pm
Зайдите на сайт https://vksave.com/ и слушайте огромную коллекцию музыки или скачайте бесплатно. Вся музыка ВКонтакте это удобный способ насладится прослушиванием треков онлайн. Подборки музыки, хиты, ТОП исполнителей, альбомы целиком, русская и зарубежная музыка, подборки под настроение и все это в одном месте.
bolevfup · October 29, 2023 at 7:41 pm
Buy tickets for the Broadway musical The Lion King at the Minskoff Theater in New York https://lionkingtickets.nyc/ at the best prices with the best seats on our website, and also check out upcoming performances for 2023 -2024. Take advantage of exclusive offers and get tickets to unforgettable theater performances.
Share Purchase Agreement Singapore · October 29, 2023 at 7:43 pm
Hi! This post could not be written any better! Reading this post reminds me of my old room mate!
He always kept chatting about this. I will forward this write-up to him.
Pretty sure he will have a good read. Thanks for sharing!
Kevinhig · October 29, 2023 at 7:49 pm
Faunatis
Xandersteld · October 29, 2023 at 8:25 pm
yasmin
Porn Videos Online · October 29, 2023 at 8:26 pm
Porn Videos Online
Elliotteurog · October 29, 2023 at 8:31 pm
https://telegra.ph/Ч—Ч©Ч¤Ч Ч™Ч•ЧЄ-10-29-35
Elliotteurog · October 29, 2023 at 8:40 pm
https://telegra.ph/Ч—Ч©Ч¤Ч Ч™ЧЄ-10-29-117
Elliotteurog · October 29, 2023 at 8:41 pm
https://telegra.ph/Ч—Ч©Ч¤Ч Ч•ЧЄ-10-29-30
natjazhnyepotolkicena · October 29, 2023 at 8:47 pm
[url=https://natjazhnye-potolki-cena.kiev.ua]potolki natjazhnye kiev[/url]
Как установить в течение жилплощадь домашними лапками ПОЛИВИНИЛХЛОРИДНЫЙ натяжной фальшпотолок с готового комплекта? Какой-никакие необходимы приборы не попавшие в течение комплект. Тот или другой станут трудности?
https://natjazhnye-potolki-cena.kiev.ua
Tgagjy · October 29, 2023 at 8:55 pm
buspirone 5mg drug cordarone where to buy cordarone generic
Elliotteurog · October 29, 2023 at 9:15 pm
https://telegra.ph/Ч—Ч©Ч¤Ч Ч™Ч•ЧЄ-10-29-2
pustiTon · October 29, 2023 at 9:30 pm
На сайте https://soberipoke.ru/ можно заказать доставку роллов, поке, смузи по доступным ценам. В ассортименте доставки есть десерты и лимонады на любой вкус, вы обязательно это должны попробовать. При заказе нескольких предложений из меню, вы гарантировано получите подарок. Есть возможность скачать приложение на сайте и получать промокоды, скидки и акции. Меню может отличаться в зависимости от адреса доставки, поэтому обязательно укажите на сайте свой точный адрес.
Acesteld · October 29, 2023 at 9:42 pm
pioglitazone 30mg
fokindag · October 29, 2023 at 10:10 pm
На сайте https://minervoda.ru/ вы сможете купить Лечебные минеральные воды Чехии. Более 15 лет мы поставляем продукцию в Россию, Белоруссию и Казахстан. Наш ассортимент удовлетворит каждого покупателя, а лечебные свойства воды позволят оставаться здоровым и жизнерадостным. С полной информацией о видах, марках, условиях поставки ознакомьтесь на сайте.
inekrhag · October 29, 2023 at 10:42 pm
Сайт https://hitech24.pro/ это полезный портал, где вы сможете найти фото интерьеров, дизайн фото, фото красивого ремонта, фото отделки помещений, стен, потолков, фасадов, ремонт фото и многое другое. Возьмите себе на заметку готовые варианты, а каталог фотографий, составленных по рубрикам это быстрый поиск интересующих вас фото.
ailfomishout · October 29, 2023 at 11:12 pm
Visit https://beatleslovetickets.com/ to get the best ticket prices for all upcoming The Beatles LOVE concerts at The Mirage, Las Vegas, Nevada. Find out the appropriate date, choose the best ticket and buy it in 1 click with the best price guarantee. Tickets for theater events are already on sale – don’t miss out on unique events.
Amazonブラックフライデー · October 29, 2023 at 11:33 pm
Hey there! Do you know if they make any plugins
to protect against hackers? I’m kinda paranoid about losing everything I’ve worked hard on. Any
suggestions?
aslovtop · October 29, 2023 at 11:39 pm
На сайте https://selectprom.ru предлагают купить троллейные шинопроводы по доступным ценам. Основной целью компании является бесперебойная работа оборудования заказчика. Вам будет предложен квалифицированный подбор троллейного шинопровода, сервисное, гарантийное и пост гарантийное обслуживание, доступные цены. На сайте представлены различные версии токоведущих шин повышенного совершенства. Оплатить покупки можно любыми удобными для вас способами. Подобрать в каталоге идеальную модель сможет каждый разбирающийся в электронике сотрудник.
AejKaqddwfinnagt · October 29, 2023 at 11:45 pm
Very good site for check cours [url=https://bitcoinpriceusd2.info/]Bitcoin Price USD[/url]
eklamfurdy · October 29, 2023 at 11:59 pm
Сайт https://taker6.casino/ это увлекательная возможность играть в азартные игры, деля ставки и получая удовольствие от процесса. Выберете любимую игру, получите интересные коэффициенты, бонусы за регистрацию и интересно проводите время. Более подробную информацию вы сможете получить на сайте.
ukovendax · October 30, 2023 at 12:49 am
На сайте http://dgchip.ru можно рассчитать стоимость тюнинга двигателя. Для этого необходимо ввести данные по авто и выбрать нужные работы. Компания предлагает разные виды услуг: чип-тюнинг двигателя, отключение мочевины, отключение вихревых заслонок и другое. Здесь можно сделать чип тюнинг двигателей известных марок авто. На сайте есть возможность подробнее ознакомиться с работами компании, а также ценами и услугами. На все виды работ предлагается гарантия и официальные документы.
rterentrauh · October 30, 2023 at 1:43 am
Студия дизайна интерьеров в Екатеринбурге https://studio-mint.ru/ это профессиональные услуги по дизайну и интерьеру квартир и домов, дизайну интерьера коммерческих помещений и офисов, а также индивидуальное проектирование коттеджей и загородных домов, подбор и закуп материалов. На сайте вы сможете узнать стоимость дизайн проекта за 1 минуту.
cheap car insurance in dallas texas · October 30, 2023 at 1:53 am
Your blog is actually becoming my best source for well-researched information. This short article,
like the others, is both insightful and well-written.
Also visit my web site; cheap car insurance in dallas texas
aOlgaGex · October 30, 2023 at 2:03 am
На сайте https://dental-site.ru/ вы сможете заказать уникальный и готовый сайт для стоматологии, который приведет вам первичных пациентов и понравится вашим клиентам. Все сайты адаптированы под смартфоны, легко меняются без программиста и самое важное – это моментальный запуск сайта стоматологии. Ознакомьтесь с ценами на сайты для стоматологии и свяжитесь по контактам указанным на сайте.
How much does car insurance cost South Houston TX · October 30, 2023 at 5:35 am
Your composing design is impeccable. This is one of the handful of blog posts where I go through every
word, throughout. Congratulations!
Here is my web blog – How much does car insurance cost South Houston TX
NormanPlume · October 30, 2023 at 5:54 am
buy cialis pill [url=http://cialis.foundation/#]п»їcialis generic[/url] buy cialis pill
namamRashy · October 30, 2023 at 5:54 am
На сайте https://lilibum.ru есть возможность познакомиться для поиска друзей либо вторых половинок. Бесплатный сайт знакомств дает возможность обмениваться сообщениями, загружать и делиться фото, а также назначать свидания. Широкие возможности ресурса гарантируют интересное общение с людьми и приятное времяпровождение. Здесь продуманная система фильтрации, высокий уровень безопасности и анонимности. Разнообразие анкет и активная аудитория позволяют найти по душе себе собеседника или вторую половинку.
Byzaimov · October 30, 2023 at 6:06 am
Случилось так, что я получил штраф за нарушение ПДД. Казалось бы, мелочь, но на тот момент у меня не было лишних денег. Введя в Google запрос, я наткнулся на сайт bycesoir.com, который заявлял о себе как о платформе с лучшей подборкой МФО 2023 года.
Там я нашел [url=https://bycesoir.com/]займы онлайн на карту срочно круглосуточно[/url] и сразу же заполнил заявку. Все прошло быстро и без проблем, штраф оплачен, а я доволен сервисом.
faq.Lancer-club.ru · October 30, 2023 at 6:12 am
I read this post fully regarding the difference of latest
and earlier technologies, it’s awesome article.
avorozinna · October 30, 2023 at 6:37 am
На сайте https://tartugi.net/ есть возможность смотреть онлайн фильмы и сериалы в хорошем качестве. Сделайте просмотр фильмов доступнее, а вечер ? незабываемым. Зритель найдет на портале качественное видео на любой вкус. Если вы не знаете, что выбрать, можете воспользоваться тематическими подборками, либо поиском по параметрам. Популярные сериалы, новинки кино и шедевры кинематографа с известными актерами доступны на всех устройствах. Смотрите с удовольствием, комментируйте и приглашайте друзей на просмотр.
potoloknatjazhnoj · October 30, 2023 at 6:52 am
[url=https://potolok-natjazhnoj.kiev.ua/]potolok-natjazhnoj.kiev.ua[/url]
Потолки натяжные это отличное соотношение практичности равным образом дизайна. Город презентуют собой тыльный фальшпотолок, яже соединив подвесной потолок (а) также плитный фальшпотолок дает большей ненаглядная красота (а) также выразительности к вашему интерьеру.
potolok-natjazhnoj.kiev.ua
ryatarMeano · October 30, 2023 at 7:18 am
На сайте https://artplay.studio можно оставить заявку и заказать видеопродакшн и анимацию по лояльной цене. Студия поможет представить компанию и привлечь аудиторию с помощью профессиональных видео. Квалифицированные специалисты легко и уверено преподнесут даже самую сложную идею, чтобы добиться хорошего результата. В арсенале студии множество инструментов для презентации продукта клиента. Подробнее ознакомиться с портфолио, а также услугами и ценами студии можно уже сейчас на сайте.
tonovrat · October 30, 2023 at 7:34 am
На сайте https://123film.pro/ вы сможете посмотреть фильмы, новинки сериалов, мультики. Также есть и популярные произведения, которые вам захочется пересматривать раз за разом. Имеются фильмы и сериалы разных жанров: комедии, ужасы, исторические, документальные. Вы сможете воспользоваться фильтром для того, чтобы отсортировать произведения по году и стране выпуска. Среди огромного выбора вы точно подберете вариант, исходя из своих предпочтений и вкуса. Все фильмы в безупречном качестве, с хорошим и четким звуком, а потому точно произведут впечатление.
ovalenop · October 30, 2023 at 7:41 am
korobok-spb.ru – упаковка для пиццы сайт, где есть возможность купить коробки из гофрокартона по приемлемой цене. Вы можете просмотреть информацию о нужном для вас товаре – стоимость, характеристики, а также условия оплаты. Клиентам дают гарантии на высочайшее качество продукции и осуществление заказов в установленные сроки. Доставка совершается по СПБ и Ленинградской области, также есть возможность отправки товаров в регионы Российской Федерации. Оставьте заявку на портале либо перезвоните менеджеру, чтобы приобрести качественную гофротару.
CarlosUnsap · October 30, 2023 at 8:02 am
казино сайт онлайн
Adjustable Car Air Vent Phone Holders · October 30, 2023 at 8:03 am
My developer is trying to persuade me to move to .net from
PHP. I have always disliked the idea because of the expenses.
But he’s tryiong none the less. I’ve been using WordPress
on a number of websites for about a year and am concerned about switching to another platform.
I have heard excellent things about blogengine.net. Is there a way I can import all my wordpress posts into it?
Any help would be really appreciated!
http://Tartech.ru · October 30, 2023 at 8:21 am
Great weblog right here! Also your web site rather a lot
up very fast! What host are you the use
of? Can I am getting your associate link on your host?
I want my site loaded up as quickly as yours lol
CarlosUnsap · October 30, 2023 at 8:21 am
чемпион казино онлайн
CarlosUnsap · October 30, 2023 at 8:22 am
казино бесплатное онлайн
Francisnem · October 30, 2023 at 8:39 am
nettruyen
BrettDum · October 30, 2023 at 9:08 am
truyện tranh đam mỹ
CarlosUnsap · October 30, 2023 at 9:15 am
казино беларусь онлайн
nonprofit accounting · October 30, 2023 at 9:59 am
Wow, amazing weblog layout! How lengthy have you ever been blogging for?
you make running a blog glance easy. The total glance of your website is fantastic,
as well as the content material!
idorovber · October 30, 2023 at 10:08 am
On the website https://wishes.wiki/ you can find an interesting and huge collection of pictures for all occasions – from beautiful morning wishes and birthday greetings to New Year’s cards for 2024. And the catalog of popular topics will allow you to quickly find what is of interest to many.
esomelek · October 30, 2023 at 10:19 am
На сайте http://xn--e1akaddgcecbbo4a.xn--p1ai/ можно вызвать мастера ремонта газовых колонок на дому по приемлемым ценам. Магазин предлагает газовые колонки и материалы к нему по гарантии качества напрямую от производителя. Квалифицированные специалисты быстро выполнят свои услуги. Заявку есть возможность оформить любым способом на сайте. Опытные сотрудники возьмутся за ремонт разной сложности и в любое для вас удобное время. Подробнее ознакомиться с услугами и ценами, вы можете на сайте.
intensive outpatient program Nashville · October 30, 2023 at 10:29 am
I savor, lead to I discovered exactly what I used to
be taking a look for. You’ve ended my 4 day lengthy hunt!
God Bless you man. Have a nice day. Bye
Www.Larocque.net · October 30, 2023 at 10:50 am
I’m gone to say to my little brother, that he should also go to see
this webpage on regular basis to get updated from
most up-to-date news update.
JmimoEmusa · October 30, 2023 at 11:30 am
https://mirstroy.by/ – это сайт на котором вы найдете входные и межкомнатные двери по отличным ценам. Металлические двери можно приобрести с установкой и отделкой откос под ключ. На сайте вы найдете строительные услуги такие как кладка блоков, устройство фундаментов, строительство кровли, строительство каркасных домов и пристроек.
avetatoift · October 30, 2023 at 11:30 am
На сайте https://sprotyv.org/ рассказывается о последних новостях с фронта, о войне, а также другие актуальные новости Украины. Здесь вы найдете самые горячие новости политики, экономики, все о здоровье, культуре и бизнесе. Задача сервиса – ежедневное освещение событий жизни, которые больше всего волнуют современного человека. На сайте есть рубрики «Популярное» и «Последние статьи», с которыми вы можете ознакомиться уже сейчас. Разнообразие контента, дает возможность удовлетворить интересы большего числа пользователей.
Musoroboss · October 30, 2023 at 11:30 am
Заказать вывоз мусора СПб musoroboss.ru
Представляем Вам компанию МусорБОСС, которая промышляет вывозом строительного мусора по Санкт-Петербургу и Ленинградской области. Работаем на основании спец лицензии по нормативам СанПин, круглосуточно и 7 дней в неделю. По всем вопросам заходите на веб ресурс musoroboss.ru или звоните по контактному телефону.
По поиску [url=https://musoroboss.ru/product/demontazh-metallokonstrukczij/]демонтаж металлоконструкций спб[/url] Вы на верном пути. Мы уже большое количество лет промышляем проблемами вывоза крупногабаритного мусора, который запрещено выбрасывать в простые контейнеры. Весь мусор отправляется на утилизацию. Кроме вывоза, мы также выполняем демонтажные работы. Конкретнее: демонтаж многоквартирных домов, дачных домиков, бетонных конструкций, промышленный демонтаж строительных конструкций, кирпичных домов, железобетона, заборов, батарей отопления, паркета, крыши, снос дачных деревянных домов, телевизоров, стен и перегородок, стяжки из бетона и цемента и многого другого. В нашей команде квалифицированные грузчики и водители различных транспортных средств, которые уверенно справятся с любой работой.
Наши услуги разные: заказать контейнер “Мамонт” до 20т, вывоз мусора с участка, вывоз порубочных остатков, вывоз мусора в мешках, вывоз металлолома, вывоз битого стекла и многие другие. К любому клиенту мы пытаемся найти индивидуальный подход и пытаемся решить проблемы по факту. Звоните по любым необычным вопросам и мы поймем как прийти к идеальному решению совместно.
Для срочного подбора нужных Вам услуг пришлите фото мусора на онлайн портале musoroboss.ru уже сейчас. Обязательно укажите Ваш адрес и условия погрузки, такие как наличие лифта, этаж и нужны ли грузчики. Оператор обработает заявку в самые быстрые сроки и отправит Вам необходимую машину. Наш автопарк весьма большой и под каждый случай будет подходящий вариант. Это: камаз, самосвал, гусеничный экскаватор, погрузчик и другие.
Забронировать [url=https://musoroboss.ru/vyvoz-musora-v-gatchine/]вывоз строительного мусора гатчина с грузчиками дешево[/url] можно по контактному телефону +7(921)326-66-66 или на нашем сайте. Офис работает по режиму времени с 9:00 до 21:00, а вывоз мусора осуществляется 24 часа в сутки. Мы расположены по адресу: Санкт-Петербург, дорога на Турухтанные Острова, 10. Звоните, оформляйте заявку на сайте, будем рады Вам помочь!
Jameswhoca · October 30, 2023 at 12:10 pm
http://kamagra.icu/# sildenafil oral jelly 100mg kamagra
natjazhnyepotolkicena · October 30, 2023 at 12:19 pm
[url=http://www.natjazhnye-potolki-cena.kiev.ua]www.natjazhnye-potolki-cena.kiev.ua[/url]
Как установить в течение жилплощадь личными лапками ПОЛИВИНИЛХЛОРИДНЫЙ сетконатяжной потолок изо отделанного комплекта? Какой-никакие потребуются инструменты безграмотный вошедшие в комплект. Какие будут трудности?
https://natjazhnye-potolki-cena.kiev.ua
vyachEvomi · October 30, 2023 at 12:27 pm
На сайте https://shinoprovod.moscow дана актуальная информация о шинопроводе. Здесь пользователи смогут за короткий период получить сравнительную характеристику о продукте, ценовой анализ, принципы его выбора и расчета. Интернет-портал приглашает поставщиков и производителей шинопровода с целью размещения информации об их продукте, необходимых потенциальным клиентам. Также на сайте вы можете ознакомиться с продукцией, увидеть каталог, заполнить обратную форму и связаться с администрацией портала.
CarlosUnsap · October 30, 2023 at 12:42 pm
онлайн казино преимущества
CarlosUnsap · October 30, 2023 at 12:52 pm
казино онлайн вавада
CarlosUnsap · October 30, 2023 at 12:53 pm
суд онлайн казино
kazakpiony · October 30, 2023 at 1:07 pm
iz-nerzhaveyki.ru – нержавеющая труба сайт, где представлен каталог, в котором вы найдете шаровые краны и гибкую подводку по доступной стоимости. Здесь представлена высококачественная продукция и дана гарантия на то, что вы точно останетесь довольны. Оптовым покупателям есть возможность продажи со скидкой, что дает возможность еще больше экономить. Приобрести изделия из нержавеющей стали на выгодных условиях возможно, связавшись с опытным менеджером. Грамотный специалист подробно расскажет об интересующей вас продукции и посоветует, что именно вам подойдет и почему.
RobertCalry · October 30, 2023 at 1:25 pm
Работа вахтовым методом
CarlosUnsap · October 30, 2023 at 1:30 pm
казино 1вин онлайн
povairvix · October 30, 2023 at 2:07 pm
На сайте https://znaya.ru/ представлена подборка курсов по разным интернет-профессиям. Блог поможет найти нужную информацию, и получить все сведения из первых рук. Здесь собрано все в одном месте, инфа актуальная и нужная. Разделы все насыщенные. Данные онлайн-курсы для тех, кто только собирается осваивать удаленную работу, и для тех, кто хочет повысить свой скилл. Каждый сможет выбрать для себя то, что ему необходимо. Удобный интерфейс и поиск поможет быстро подобрать нужную информацию.
CarlosUnsap · October 30, 2023 at 2:13 pm
онлайн казино в узбекистане
CarlosUnsap · October 30, 2023 at 2:23 pm
казино онлайн без регистрации
Ron Spinabella · October 30, 2023 at 2:27 pm
Hi, Neat post. There is an issue with your website in web explorer, could test this?
IE nonetheless is the marketplace leader and a large portion of folks will pass over your magnificent writing because of this problem.
Check out my webpage: Ron Spinabella
natjazhnyepotolkicena · October 30, 2023 at 2:45 pm
[url=https://www.natjazhnye-potolki-cena.kiev.ua]www.natjazhnye-potolki-cena.kiev.ua[/url]
Как водворить в квартиру домашними лапками ПВХ натяжной фальшпотолок с готового комплекта? Какой-никакие необходимы инструменты без- вошедшие в течение комплект. Какой-никакие довольно трудности?
natjazhnye-potolki-cena.kiev.ua
Jamesmaf · October 30, 2023 at 3:02 pm
http://cialis.foundation/# Generic Cialis price
nkuznDex · October 30, 2023 at 3:41 pm
На сайте https://arenda.rus.taxi/ вы сможете арендовать авто под такси по выгодным ценам без залога, депозита и первоначального взноса. Все автомобили технически обслужены и исправны. Прозрачные условия аренды, выбор автомобилей от эконом до до комфорт плюс, подключение к агрегаторам такси – все на нашем сайте.
avcevfub · October 30, 2023 at 4:13 pm
На сайте https://mnogo-dereva.ru/ можно выгодно купить пиломатериалы для строительства бань, домов, беседок и декоративной отделки помещений. Интернет-магазин реализует пиломатериалы от производителей, поэтому покупатели отлично могут сэкономить. Сотрудники подберут для вас добротные стройматериалы и организуют быструю доставку. Также клиентам предлагают акции на товары. Заказать и приобрести пиломатериалы несложно, звоните на сайт и специалисты обязательно вам помогут.
Williamkax · October 30, 2023 at 4:48 pm
kantor bola
dincoAgilk · October 30, 2023 at 5:54 pm
На сайте https://minivan.online есть возможность заказать такси минивэн по выгодным тарифам. Вам будут предложены автомобили с откатными дверями с обеих сторон, и с большими креслами для пассажиров. Все водители прошли школу мастерства. На портале опубликованы разные тарифы и показаны способы оплаты, чтобы вы смогли выбрать оптимальный вариант для ваших потребностей. Работают как по предоплате, так и оплате по факту. Также на сайте можно увидеть отзывы и новости компании.
miheepopay · October 30, 2023 at 6:33 pm
minicamera.ru – микрокамера сайт, где есть широкий выбор миниатюрных WiFi видеокамер по приемлемой стоимости. Беспроводные камеры работают через приложения для IOS и Android. Благодаря ему, вы с легкостью сможете настроить камеру под различные задачи. Покупателям предоставляются персональные скидки в зависимости от заказа. На сайте есть возможность детальнее ознакомиться с каталогом интернет-магазина, а также оплатой и доставкой. Если у вас остались какие-либо вопросы, позвоните нам по телефону, и грамотные консультанты помогут вам определиться с выбором.
Eiknns · October 30, 2023 at 6:44 pm
zantac 150mg over the counter ranitidine 300mg pill order celecoxib 100mg generic
kitchen_rak · October 30, 2023 at 7:10 pm
commercial freezer walk in https://ckitchen11.com/
airinaglurf · October 30, 2023 at 7:47 pm
O site https://aviatoraposta.ru/ permite que você aposte na aposta do aviador. As apostas Aviator permitem que você aumente seus ganhos com apostas baixas e dá aos jogadores mais experientes a oportunidade de ganhar mais. Conheça as tarifas no site oficial.
iiegoIceft · October 30, 2023 at 7:57 pm
На сайте https://volman.ru/ вы сможете ознакомиться с последними новостями, дайджестами и статьями о WEB и IT индустрии, а также узнать мнения экспертов по этому поводу. Новостная лента постоянно пополняется, что делает сайт удобным для того, чтобы быть в курсе последних событий из мира IT.
Darin · October 30, 2023 at 8:04 pm
%%
Also visit my webpage … https://zero1magazine.com/2023/08/11/why-is-it-beneficial-to-become-a-vip-player-at-tedbet-casino/
cvetkNok · October 30, 2023 at 9:09 pm
На сайте https://oknonovoe.ru/ представлена актуальная информация о пластиковых окнах. Здесь вы узнаете о преимуществах и о выборе правильных материалов для дома. Если желаете знать, какие оконные профили лучше подобрать и как выбрать изоляцию, то блог на сайте точно для вас. Специалисты помогут грамотно разобраться в мире пластиковых окон, а также принять верное решение для вашего жилища. На сайте есть удобный поиск, с помощью которого вы можете выбрать нужную информацию для вас. Если остались вопросы, напишите на портал, и специалисты проконсультируют вас.
infomtal · October 30, 2023 at 9:37 pm
На сайте https://numerolog56.ru дана актуальная информация о занимательной нумерологии. Здесь вы сможете делать прогнозы на любовь, брак, здоровье и другое. Узнать, историю карт таро, какие бывают болезни по планетам, а также выбрать число кармического долга. Все что вам необходимо сделать – это приготовить ручку и чистый лист бумаги, и потом, вы станете волшебником своей жизни. На портале собраны разделы, где каждый найдет занимательную информацию для себя. Также здесь есть онлайн нумеролог, которого, вы сможете прослушать уже сейчас.
https://buyer-life.com/redirect/?url=https://www.Sbnation.com/users/Gboplay138slotmaxwin · October 30, 2023 at 9:55 pm
When someone writes an piece of writing he/she maintains the thought of a user in his/her brain that how a user can know it.
Thus that’s why this article is perfect. Thanks!
Earnestgek · October 30, 2023 at 11:46 pm
http://kamagra.icu/# Kamagra tablets
Jeffreyascer · October 30, 2023 at 11:49 pm
Found an enthralling article, I recommend you to read http://orex.3nx.ru/viewtopic.php?p=5693#5693
biryufer · October 30, 2023 at 11:57 pm
shpargalkin.ru – камера для экзамена сайт, который предлагает купить микрокамеры и микро наушники для сдачи любых экзаменов по лояльной цене. В интернет-магазине можно выбрать товары по своим финансовым возможностям. Стоимость на комплекты весьма заманчивая. На сайте имеется каталог, с которым можно ознакомиться в любое время. Не упустите возможность купить у нас микрокамеру и наушники, и ощутить все достоинства уже сегодня. Гарантируем качество и оперативность доставки. Если остались вопросы, перезвоните нам, специалисты дадут рекомендации по выбору товаров.
markoTus · October 31, 2023 at 12:16 am
FTBTO https://ftbto.ru/ – юридический справочник в сфере трудовой миграции в Россию, обеспечивающий профессиональную поддержку и консультации. Пишем о миграции и мигрантах, их правах и обязанностях при переезде в Российскую Федерацию.
AejKaqddwfinnagt · October 31, 2023 at 12:50 am
Very trust site for check cours [url=https://bitcoinpriceusd2.org/]Bitcoin Price USD[/url]
AgafoSitte · October 31, 2023 at 1:28 am
На сайте https://koinmedya.ru/ вы сможете узнать актуальные новости криптовалют, просматривать данные, котировки, финансовые инструменты, а также последние новости и аналитику. Здесь собрана вся необходимая информация о мировых фондовых рынках, блокчейне, биткоине и многом другом. Эксперты и аналитики следят за самыми важными новостями в мире криптовалют. Читайте обзоры и держите руку на пульсе. Подписывайтесь на рассылку, чтобы не пропустить последние обновления.
Turkrutv · October 31, 2023 at 2:06 am
Лучшие турецкие сериалы смотреть бесплатно turkrutv.ws
Сегодня на гребне рейтинга просмотров стоят турецкие сериалы. А всё потому что их есть за что любить. Это шикарная картинка, красивые герои, захватывающие сюжеты и, естественно, история отношений. Но вовсе не все сериалы можно увидеть по ТВ, большинство можно посмотреть только в сети интернет. Предлагаем Вашему вниманию наш сайт — это окно в мир турецких сериалов, открывающее перед зрителями безмерные возможности для погружения в увлекательные истории. На сайте turkrutv.ws представлен широкий выбор жанров, включая драмы, боевики, детективы, военные фильмы, криминальные и семейные сериалы, фантастику и исторические фильмы.
Если Вы искали [url=https://turkrutv.ws/best-turkey-serialy/]лучшие турецкие сериалы онлайн на русском языке[/url] в интернете, то Вы на верном пути. По причине комфортной навигации по годам выпуска, зрители могут без проблем найти интересующие их сериалы нужного года выпуска. Новинки и самые известные сериалы также представлены в отдельных категориях, позволяя быстро ознакомиться с самыми свежими и популярными турецкими сериалами. Сайт также открывает озвучку на турецком языке для тех, кто хочет погрузиться в подлинную атмосферу турецкой культуры.
Не одни сериалы оккупируют внимание любителей кино, но и рейтинги актеров и сценаристов, позволяя фанатам следить за работой своих любимых знаменитостей. Подборки и расписание сериалов помогут зрителям планировать свой досуг, а раздел “Сейчас смотрят” открывает актуальные и известные на настоящий момент сериалы, такие как “Черная жемчужина”, “Постучись в мою дверь” и “Ловушка”.
Относительно [url=https://turkrutv.ws/serials2023/]смотреть турецкие сериалы 2023 онлайн[/url] переходите к нам. Наш интернет сайт turkrutv.ws обеспечивает высокое качество просмотра, позволяя зрителям наслаждаться любимыми сериалами без рекламы и бесплатно. Сериалы доступны с различными вариантами озвучки, что делает просмотр комфортным для любого. Познакомьтесь с турецкой драмой “Кровавые цветы”, увлекательной историей “Магарсус” или романтической сагой “Грязная корзина” и окунитесь в мир турецкой культуры.
ilsuvoslubs · October 31, 2023 at 2:13 am
На сайте https://remontserwice.ru/ можно заказать ремонт техники по хорошим ценам в кратчайшие сроки. Специалисты сервиса грамотно выполнят бесплатную диагностику. На складе всегда в наличии оригинальные запчасти и аналоги от самых популярных производителей. Работа всегда выполняется оперативно, без всяких проволочек. Заказать выездное обслуживание можно уже сейчас по контактному телефону на сайте, либо написав на почту. Ознакомьтесь о ремонте и об отзывах в разделе портала.
Josephpeank · October 31, 2023 at 3:08 am
[url=https://kramp-vk17at.info]кракен даркнет маркет[/url] – кракен даркнет, кракен магазин даркнет
Marcushes · October 31, 2023 at 4:23 am
[url=https://krakenssilka-onion.info]ссылка кракен даркнет маркет[/url] – кракен даркнет ссылка, кракен ссылка onion
osago_lok · October 31, 2023 at 4:28 am
страховку на автомобиль онлайн оформить https://oformit-osago.ru/
popovKip · October 31, 2023 at 4:31 am
На сайте https://allsiding.ru/ вы сможете купить сайдинг и отделочные материалы для фасада дома и кровли по выгодным ценам. Огромный ассортимент продукции в каталоге, калькулятор, чтобы рассчитать количество сайдинга, а также самая большая база информации об отделке дома фасадными материалами – от выбора материала до самостоятельной обшивки вашего дома.
NormanPlume · October 31, 2023 at 4:35 am
п»їkamagra [url=http://kamagra.icu/#]Kamagra tablets[/url] cheap kamagra
eevarrem · October 31, 2023 at 5:08 am
На сайте https://lima161.ru вы можете заказать лимузин, позвонив по номеру телефона. Вашему вниманию предлагаются элегантные и роскошные автомобили. Прокат лимузина пользуется большой популярностью, поэтому, если вы решите воспользоваться данной услугой, позаботьтесь об этом заранее. Посмотреть фотографии экстерьера и внутренней отделки авто, есть возможность в разделе «Автопарк». Цена на прокат лимузина на час представлена на сайте, где также вы увидите фото и контакты компании.
Thomassob · October 31, 2023 at 5:08 am
[url=https://krmp-vk17at.info]кракен даркнет ссылка[/url] – кракен даркнет маркетплейс, кракен даркнет вход
lanasGok · October 31, 2023 at 5:19 am
No site https://aviatora-posta.ru/ faça previsões e faça apostas em um jogo específico. Aviator aposta é um jogo interessante que irá agradar a todos os fãs de jogos de azar. O site oficial permite conhecer todas as informações.
rovserCer · October 31, 2023 at 5:25 am
shkolnaya-parta.ru – https://shkolnaya-parta.ru/katalog/detskie-stulya сайт, где есть возможность купить кресло школьника по приемлемой стоимости. Здесь представлен огромный выбор товаров с доставкой на дом по Москве и другим регионам. Каталог портала постоянно пополняется новейшими моделями и интересными приспособлениями. Для заказа интересующего товара, поместите его в «Корзину» либо позвоните по телефону на сайте, квалифицированные менеджеры помогут вам сделать верный выбор, а также дадут консультации по всем вопросам. На данном ресурсе можно найти каталог товаров, также ознакомиться со скидками и уценками.
KennethJidge · October 31, 2023 at 5:38 am
можно купить аттестат за 9 класс http://attestat-9-klass.ru/
Hermelinda · October 31, 2023 at 6:33 am
Incredible a lot of good material.
Food & Drink · October 31, 2023 at 6:59 am
always i used to read smaller articles or reviews which as well clear their motive, and that is also happening with this article which I am
reading now.
sandrTuh · October 31, 2023 at 7:02 am
На сайте https://m-strop.by/ можно заказать стропы грузовые, канатные, текстильные и другие грузозахватные приспособления по приемлемым ценам. Продукция всегда имеется в наличии на складе. Для оптовых покупателей предоставляется скидка. Детали доставки можно уточнить у менеджера по телефону. Для постоянных клиентов предоставляются выгодные условия. На сайте можно подробнее ознакомиться с каталогом продукции и заказать звонок по телефону. С выбором нужных позиций помогут определиться квалифицированные специалисты.
аренда юридического адреса в москве от собственника · October 31, 2023 at 7:15 am
аренда юридического адреса в москве от собственника
DavidAmelt · October 31, 2023 at 7:34 am
[url=https://kraken-vk17at.info]кракен даркнет площадка[/url] – кракен даркнет маркет тор, кракен даркнет
RafaelMew · October 31, 2023 at 8:31 am
[url=https://krakenssilka.info]кракен ссылка онлайн[/url] – кракен ссылка онлайн, кракен даркнет ссылка тор
Study in Tbilisi · October 31, 2023 at 8:50 am
Greetings! Very useful advice in this particular article!
It’s the little changes that make the largest
changes. Many thanks for sharing!
toninDub · October 31, 2023 at 8:52 am
На сайте https://xakerforum.com/topic/110/page-7 вы можете заказать услуги по взлому страниц почты и детализации смс по приемлемым ценам. Хакер предлагает качественные услуги, которые проводятся анонимно с полной гарантией конфиденциальности для клиента. Он справится с даже самой трудной задачей, вы можете в этом сами убедиться, заказав у него услуги напрямую либо по электронной почте, которая указана на сервисе. Также здесь вы ознакомитесь с ценами специалиста и сможете задать ему свои вопросы, на которые он оперативно отвечает.
savinimmot · October 31, 2023 at 12:04 pm
На сайте https://ad.kinogid.org вы найдете большое количество кинолент разных жанров. Чтобы подобрать нужный вариант, необходимо воспользоваться удобным фильтром. Портал каждый день обновляется, и добавляются новые фильмы, благодаря чему пользователи могут с комфортом наслаждаться времяпровождением. Все фильмы представлены в отличном качестве и с хорошим звуком. Здесь не надо тратить деньги на регистрацию. Станьте постоянным посетителем портала и смотрите фильмы в любое время.
RobertTuh · October 31, 2023 at 12:10 pm
[url=https://krakenonion-krmp.info]кракен браузер ссылка[/url] – кракен сайт ссылка, кракен ссылка зеркало
dokimZenty · October 31, 2023 at 12:25 pm
aifua.com.ua – сайт, где представлена актуальная и достоверная информация. Вся она структурирована и разбита на тематики. Главными принципами работы ресурса является объективность и оперативность. Ищите новости на тему включи новини україни ? Здесь есть возможность найти статьи, которые имеют качественные фото и удобны для чтения. Вы можете в любое время ознакомиться с новостями России, Украины и мира. Желаете быть в курсе происходящего первым? С нашим сайтом вы получите доступ к правдивым и подробным сведениям. Материалы о культуре, политике, спорте и экономике уже вас ждут!
alininDom · October 31, 2023 at 12:36 pm
На сайте https://lightaudio.ru ознакомьтесь с лучшими новинками за неделю. Вы можете слушать и скачивать совершенно бесплатно на телефон и пк в хорошем качестве. Используя простую и удобную систему поиска, вы с легкостью найдете то, что вас интересует. Наслаждайтесь музыкой у нас и улучшайте свой опыт прослушивания. Все что вам нужно – это зайти на наш музыкальный портал, найти свой трек через поисковую систему либо прослушать последние новинки. Добавляйте нас в закладки, чтобы не потерять сайт.
filovagow · October 31, 2023 at 2:32 pm
O site https://aviatora-posta.xyz/ é um jogo emocionante onde você pode fazer apostas e, com alto grau de probabilidade, ganhar no aviator aposta mesmo sem qualquer experiência de jogo. O site oficial lhe dirá a estratégia e lhe dará conselhos iniciais sobre a atitude correta em relação ao jogo.
Cordellzet · October 31, 2023 at 2:48 pm
[url=https://kraken-krmpcc.info]ссылка кракен даркнет маркет[/url] – ссылка кракен даркнет маркет, кракен ссылка
RobertFlier · October 31, 2023 at 3:04 pm
Encountered a captivating article, I propose you read https://www.behance.net/gallery/183331919/F1-Casino-Polska
Jamesmaf · October 31, 2023 at 3:08 pm
https://kamagra.icu/# cheap kamagra
Percywreda · October 31, 2023 at 3:51 pm
[url=https://3krmp-cc.info]кракен даркнет площадка[/url] – кракен даркнет маркет, кракен даркнет ссылка
vinaVlem · October 31, 2023 at 3:59 pm
shemi-otopleniya.ru – сайт, который имеет интересные статьи и предлагает купить по лояльной стоимости гибкую подводку из нержавеющей стали для воды. Ищите трубы для водоснабжения? Здесь предоставляют исключительно лучшую продукцию, впечатлительный выбор ассортимента, качественный сервис и персональный подход к любому клиенту. Постоянно проводятся акции, для того чтобы еще выгоднее были предложения. На профессиональную помощь специалистов можно рассчитывать в любое время, они с большим удовольствием ответят на все ваши вопросы.
www.consulting.sblinks.net · October 31, 2023 at 4:05 pm
The act formally removed de facto discrimination towards Southern and Japanese
Europeans in addition to Asians, in addition to different non-Western and Northern European ethnic teams from the immigration policy of the United States.
One egg farm within the United States produces as many eggs as all
the egg farms in Canada. Egg farms are extremely regulated in Canada.
Did you know that there are professionals who can show you how to navigate this troublesome and advanced course
of? You may know the stereotype, however you possibly can take a look at precisely
how a lot you actually know about the common Canadian by taking this quiz!
Scottish-born Canadian Angus MacAskill was 7 ft 9 in and the tallest recorded man who was not tall from a
pathological motive. How tall is the average Canadian man? The typical Canadian also uses social networking web sites resembling Facebook and Twitter.
The typical Canadian withdraws $118 every time he or she uses the ATM, $236 at the bank teller,
and $forty three as money again from some extent-of-sale purchase.
Water use has decreased from 90 gallons (342 liters) in 1991.
Still, the typical Canadian makes use of almost twice as a lot
water as the typical French particular person.
20 gallons (76 liters). 5 gallons (19 liters).
Neville · October 31, 2023 at 4:29 pm
Kudos, An abundance of postings.
pinupuajekzin · October 31, 2023 at 4:33 pm
[url=https://pinupuajekzin.dp.ua/]pinupuajekzin.dp.ua[/url]
Scarf-pin Up (Пин Ап) толпа – официальный сайт славного онлайн казино чтобы игроков из России. Коллекция игровых автоматов содержит более 4000.
pinupuajekzin.dp.ua
ovaksrep · October 31, 2023 at 4:37 pm
На сайте https://hotplayer.ru вы можете скачать треки бесплатно и без навязчивой рекламы. Здесь вы погрузитесь в мир музыки и обогатите свои музыкальные впечатления. Каждый день на портале есть возможность слушать новые мелодии и наслаждаться ими. Сайт предлагает возможность удобного поиска, прослушивания и скачивания музыки для любого устройства, имеющего выход в интернет. Тут можно искать треки по названию и исполнителю и следить за обновлениями. Новинки музыки ждут вас уже сейчас!
aslovydreaG · October 31, 2023 at 5:44 pm
На сайте https://blogodiet.ru/ дана подробная информация про диеты и похудения. Многие девушки и женщины недовольны своим весом: кто-то хочет сбросить вес, кто-то – набрать, ну а кто-то провести разгрузочные дни. В данном блоге ознакомитесь об этих темах поподробнее. В рубрике «Диета» вы узнаете, что нужно кушать, чтобы похудеть, какие есть плюсы и минусы известных диет для похудения. В разделе «Популярные диеты» найдете информацию о том, какие полезные свойства от диеты на основе овощей и фруктов, как нужно питаться перед тренировкой и многое другое. Подписывайтесь на блог и будьте в курсе обновления статей.
Jameswhoca · October 31, 2023 at 6:11 pm
http://kamagra.icu/# п»їkamagra
acontpaf · October 31, 2023 at 6:34 pm
На сайте https://prawda.org.ua вы узнаете все об общественно-политических и экономических событий в Украине. Основная тематика портала – это социальные проблемы, политика, экономика. Здесь есть постоянно обновляемая лента новостей, архив публикаций по годам, блоги политиков, сообщение для прессы, правдивый компромат. В рубрике «Читательская аудитория» можно ознакомиться с количеством аудитории за месяц в интернет-издании. Подпишитесь на новости и будьте в курсе всех событий первыми.
krovelnye · October 31, 2023 at 7:07 pm
[url=https://krovelnye-materialy.ru/]krovelnye-materialy.ru[/url]
Угол – прочная электрохимзащита дома от осадков, ветра и еще крайных температурных условий. Однако симпатия тоже выступает эпохальную цена на визуальном внешности строения, подчёркивая евонный индивидуальность.
krovelnye-materialy.ru
namaripoivy · October 31, 2023 at 7:28 pm
m-strop.by – сайт, который предлагает приобрести стропы текстильные, грузовые, канатные и другие грузозахватные приспособления на выгодных условиях. Большой выбор продукции позволяет удовлетворить самых взыскательных к качеству клиентов. Для оптовых клиентов предоставляются скидки. Ищите таль электрическая цепная? На сайте можно найти много полезной информации, ознакомиться с описанием и характеристиками продукции. Если возникнут вопросы, можно позвонить по телефону на сайте и получить квалифицированную консультацию от грамотных специалистов.
해운대고구려 · October 31, 2023 at 9:41 pm
I am extremely inspired together with your writing talents as neatly as with the structure in your blog.
Is that this a paid subject matter or did you modify it yourself?
Anyway keep up the excellent quality writing, it’s uncommon to look a great weblog like this one these days..
technology · October 31, 2023 at 9:42 pm
Very nice post. I just stumbled upon your blog and wanted to say
that I have truly enjoyed browsing your blog posts. After all I’ll
be subscribing to your feed and I hope you write again very soon!
Williampam · October 31, 2023 at 9:46 pm
[url=https://kraken2vk.info]kraken tor[/url] – kraken darknet market ссылка, кракен онион даркнет площадка
Tuuypz · October 31, 2023 at 9:46 pm
domperidone 10mg over the counter buy generic tetracycline buy sumycin 500mg online
rgo303.monster · October 31, 2023 at 9:55 pm
I visited many blogs however the audio feature for audio songs current at this
website is truly wonderful.
attest_nic · October 31, 2023 at 10:23 pm
красный аттестат 11 http://attestat-11-klass.ru/
Derekhilky · October 31, 2023 at 10:25 pm
Came across a unique article – it’s worth your attention https://xnxxporndorm.com/
Russellreoto · October 31, 2023 at 11:12 pm
nettruyenmax
Omaristeld · October 31, 2023 at 11:19 pm
LГҐn 40000 kr
RobertTum · October 31, 2023 at 11:19 pm
На сайте http://www.rp.rv.ua освещаются главные новости Ровно и Украины. Для удобства пользователей был разработан уникальный поиск по свежим событиям. Здесь есть такие разделы новостей: недвижимость, политика, общество, экономика, в мире. Портал всегда стремится к разнообразию материала и формирует у читателя объективное представление о жизни в Украине. Лента новостей дня ? это самые последние и срочные новости в Ровно, Украине и мире. Заходите на сайт и будьте в курсе горячих новостей.
xenical erfarenheter · October 31, 2023 at 11:48 pm
Good blog you’ve got here.. It’s hard to find quality
writing like yours nowadays. I really appreciate people like you!
Take care!!
doma_excub · November 1, 2023 at 12:17 am
Демонтаж и снос частных домов с вывозом мусора в Москве и Московской области – http://msk-demontazh-doma-24.ru/. Слом дома вручную и спецтехникой производим по ценам ниже рынка за 1 день. Бесплатный выезд специалиста на объект.
AejKaqedwfinnagt · November 1, 2023 at 12:35 am
Very trust site for check best cours [url=https://bitcoinpriceusd2.cloud/]Bitcoin Price USD[/url]
free porn · November 1, 2023 at 12:49 am
Hello there, just became aware of your blog through Google, and
found that it is really informative. I’m going to watch out for brussels.
I’ll appreciate if you continue this in future.
Many people will be benefited from your writing.
Cheers!
Lesteracror · November 1, 2023 at 1:47 am
[url=https://kraken-v2tor.info]кракен ссылка onion[/url] – кракен darknet ссылка, кракен ссылка
отчетные документы за проживание москва · November 1, 2023 at 2:05 am
Pretty part of content. I simply stumbled upon your blog and in accession capital to say that I acquire in fact enjoyed account your blog posts. Any way I’ll be subscribing in your augment or even I achievement you get right of entry to persistently rapidly.
NormanPlume · November 1, 2023 at 3:26 am
Levitra online USA fast [url=http://levitra.eus/#]Buy generic Levitra online[/url] Buy Vardenafil 20mg
Emma · November 1, 2023 at 3:47 am
Cheers. A lot of forum posts.
ラブドール正規代理店 · November 1, 2023 at 3:49 am
bookmarked!!, I love your web site!
Donalddug · November 1, 2023 at 4:26 am
[url=https://krake10vk.info]кракен онион ссылка онлайн[/url] – кракен тор ссылка онион, сайт кракен тор
osovaomidE · November 1, 2023 at 4:47 am
На сайте https://sdampodkluch.ru/ речь пойдет о том, как понятно построить дом и сделать качественный ремонт своими руками. Здесь даны советы дизайнеров, которые расскажут, как правильно выбрать дизайн и красиво оформить интерьер вашего помещения. Также ознакомитесь с выбором строительных материалов и инструментов. Сайт разделен на рубрики, для того чтобы пользователям было удобно выбрать то, что им необходимо. Благодаря советам и занимательной информации при подготовке к ремонту, вы станете достойным специалистом, как профессиональные мастера.
pinupuajekzin · November 1, 2023 at 5:47 am
[url=https://pinupuajekzin.dp.ua/]pinupuajekzin.dp.ua[/url]
Scarf-pin Up (Пин Ап) толпа – официальный сайт славного онлайн толпа для инвесторов изо России. Номенклатура игровых машин насчитывает сильнее 4000.
pinupuajekzin.dp.ua
pavlovNub · November 1, 2023 at 6:03 am
diliht.ru – сайт, который дает возможность приобрести камеры Аквабласта по доступной стоимости, с доставкой по Российской Федерации. Многолетний опыт работы на различных объектах позволяет получить правильную оценку состояния поверхности и предложить индивидуальное и экономически выгодное решение задач клиента. На сайте есть возможность подробнее ознакомиться с камерами Аквабластинга, узнать их характеристики, описание и цену. Ищите аквабласт цена? Оставьте заявку, либо перезвоните нам по телефонам, и наш специалист проконсультирует вас, а также расскажет об услугах и стоимости.
pinupuajekzin · November 1, 2023 at 7:28 am
[url=https://pinupuajekzin.dp.ua/]pinupuajekzin.dp.ua[/url]
Pin Up (Номер Ап) казино – официальный фотосайт известного онлайн казино для игроков с России. Ассортимент игровых машин имеет сильнее 4000.
pinupuajekzin.dp.ua
pinturas fluorescentes · November 1, 2023 at 7:35 am
Hey! Do you use Twitter? I’d like to follow you if that
would be ok. I’m undoubtedly enjoying your blog and look forward to new
updates.
сериалы онлайн в hd 720 качестве · November 2, 2023 at 1:00 am
Я всегда в поиске чего-то нового и интересного. И не так давно я обнаружил, что на hdserialclub.net уже можно [url=https://hdserialclub.net/serials2023/]смотреть сериалы 2023[/url] года. Это просто находка для любителей кино, как я. Сайт регулярно обновляется, добавляются новые серии, так что скучать здесь точно не приходится. Для меня это стало отличным способом провести время и узнать о новых трендах в мире кино.
Jamesmaf · November 2, 2023 at 2:42 pm
http://cialis.foundation/# Buy Tadalafil 10mg
Заказать SEO продвижение · November 3, 2023 at 7:43 am
I wanted to thank you for this good read!! I definitely enjoyed every little bit of it. I have you bookmarked to check out new stuff you post
nyazeBAK · November 3, 2023 at 8:30 am
На странице https://vid-st.ru/assortiment/reagenty-protivogololednye/ вы сможете ознакомиться с большим ассортиментом реагентов противогололедных, которые предназначены для полного расплавления снежного покрова. Противогололедные реагенты купить в Москве по 25кг или по 50кг с доставкой и на самовывоз можно у нас. Получите больше информации на сайте.
ntoninTom · November 3, 2023 at 8:47 am
На сайте https://aviator2023.su есть возможность играть в игру и зарабатывать. Начать игру или скачать ее, вы сможете на официальном сайте. Здесь собран ТОП тактик, на которых можно играть в игру и получать каждый день прибыль. Все стратегии и тактики команда портала проверяет лично. Они сами зарабатывают и помогают получать прибыль игрокам. Все отзывы об игре только положительные, пользователи довольны скоростью выплат. Играйте и получайте прибыль каждый день, но не забывайте, что без стратегии можно уйти в минус.
dokimZenty · November 3, 2023 at 9:27 am
aifua.com.ua – сайт, где представлена актуальная и достоверная информация. Вся она структурирована и разбита на тематики. Основные принципы работы ресурса – быстрота и объективность. Ищите новости на тему новини уніан україна ? Здесь имеются статьи, которые снабжены качественными фото и очень удобны для чтения. Вы можете в любое время ознакомиться с новостями России, Украины и мира. Хотите быть в курсе всего первым? С нашим порталом вы получите доступ к исчерпывающим и правдивым сведениям. Материалы о политике, культуре, экономике, спорте уже ждут вас!
asafomaymn · November 3, 2023 at 9:47 am
На сайте https://zamok-ok.ru/vskrytie-zamkov/, вы сможете воспользоваться недорогой услугой по вскрытию дверных замков. Опытные мастера компании откроют те замки, которые другие не могут. Если вы не можете войти в офис, либо свой дом, специалисты в любое время приедут к вам и выполнят аварийное вскрытие замков. Работу они осуществляют аккуратно и по заранее оговоренной стоимости. Работают без посредников и выезжают в самые короткие сроки. Подробнее узнать об услугах, а также просмотреть работы специалистов, можете на сайте.
JasonBlumn · November 3, 2023 at 10:23 am
Абузоустойчивый VPS
Улучшенное предложение VPS/VDS: начиная с 13 рублей для Windows и Linux
Добейтесь максимальной производительности и надежности с использованием SSD eMLC
Один из ключевых аспектов в мире виртуальных серверов – это выбор оптимального хранилища данных. Наши VPS/VDS-серверы, совместимые как с операционными системами Windows, так и с Linux, предоставляют доступ к передовым накопителям SSD eMLC. Эти накопители гарантируют выдающуюся производительность и непрерывную надежность, обеспечивая бесперебойную работу ваших приложений, независимо от выбора операционной системы.
Высокоскоростной доступ в Интернет: до 1000 Мбит/с
Скорость подключения к Интернету – еще один важный фактор для успеха вашего проекта. Наши VPS/VDS-серверы, поддерживаемые как Windows, так и Linux, гарантируют доступ в Интернет со скоростью до 1000 Мбит/с, что обеспечивает мгновенную загрузку веб-страниц и высокую производительность онлайн-приложений на обеих операционных системах.
Michaelmub · November 3, 2023 at 10:42 am
[url=https://18ps.ru/catalog/oborudovanie-dlya-pererabotki-plastika/polimerpeschanoe-oborudovanie/]оборудование для утилизации пластика[/url] – переработка пластика цена, станки для переработки пластика цена
hire a hitman · November 3, 2023 at 10:57 am
Right here is the right web site for anyone who wishes to understand this topic.
You know a whole lot its almost tough to argue with you (not that I actually
will need to…HaHa). You definitely put a fresh
spin on a topic that has been discussed for decades. Wonderful stuff, just excellent!
JasonBlumn · November 3, 2023 at 11:16 am
Абузоустойчивый VPS
Абузоустойчивый VPS
orfedtor · November 3, 2023 at 11:23 am
Юридическая компания LEX PRIME https://lex-prime.ru/ в Москве это юридические услуги для физических и юридических лиц. Квалифицированные юристы, огромный опыт судебной практики, постоянное повышение квалификации, работа на результат для клиента делают обращение к нам гарантом успеха вашего процесса.
airporttransferholadre · November 3, 2023 at 11:28 am
[url=https://airporttransferholadre.com/en/directions/new-zealand]airporttransferholadre.com/en/directions/new-zealand[/url]
Words ride on the ground transfers from airports, train stations and hotels about the world. Put price. 13 car classes. Book online.
1
airporttransferholadre.com/en/directions/south-africa
air force 31 reps · November 3, 2023 at 12:25 pm
Great article.
JustinGer · November 3, 2023 at 12:35 pm
[url=https://shoparti.ru/catalog/mujskaya_obuv/letnie_tufli/]купить летние туфли мужские[/url] – купить женские зимние ботинки, купить мокасины интернет магазин
Bernd · November 3, 2023 at 1:01 pm
%%
My web blog; https://monopolyliveslot.com/
Bootlegged movies · November 3, 2023 at 1:32 pm
Hey there would you mind letting me know which web host you’re working with?
I’ve loaded your blog in 3 completely different browsers and I must
say this blog loads a lot faster then most. Can you
recommend a good web hosting provider at a honest price? Cheers, I appreciate it!
COVID-19 misinformation · November 3, 2023 at 1:36 pm
I love what you guys tend to be up too. This kind of clever work and exposure!
Keep up the fantastic works guys I’ve incorporated you guys to my blogroll.
Woodrowagodo · November 3, 2023 at 3:44 pm
Came across a unique piece – be sure to check it out https://массажист.online/people/user/62277/blog/9442/
Kevinhig · November 3, 2023 at 4:20 pm
1xbet
1xbet
Заказать SEO продвижение · November 3, 2023 at 5:17 pm
I think the admin of this website is actually working hard in favor of his web site, as here every data is quality based data.
www.yemennews.net · November 3, 2023 at 5:21 pm
I like the valuable information you provide in your articles. I will bookmark your weblog and check again here frequently. I am quite certain I will learn plenty of new stuff right here! Good luck for the next!
www.palestiniannews.net · November 3, 2023 at 5:36 pm
This is the right blog for anybody who would like to find out about this topic. You realize so much its almost hard to argue with you (not that I actually would want toHaHa). You definitely put a brand new spin on a topic that has been written about for a long time. Excellent stuff, just excellent!
www.omannews.net · November 3, 2023 at 5:52 pm
Nice post. I learn something new and challenging on sites I stumbleupon everyday. It will always be exciting to read content from other writers and practice a little something from their sites.
www.saudiarabianews.net · November 3, 2023 at 6:08 pm
I’m not sure why but this blog is loading incredibly slow for me. Is anyone else having this issue or is it a problem on my end? I’ll check back later and see if the problem still exists.
nakrut_Nuh · November 5, 2023 at 10:38 pm
накрутка поведенческих софт http://nakrutka-pf-factorov.ru/
morozphymn · November 6, 2023 at 12:44 am
На сайте https://pokupka-kvartiri.ru, даны советы, как правильно купить либо продать квартиру. Здесь вы узнаете: как поступить тогда, когда пытаешься приобрести дом или квартиру без риелтора; что нужно делать, после оформления сделки. Эксперты пошагово дадут инструкцию в статье. В разделе налоговый вычет, все о вычетах при сделках с недвижимостью. Если необходимо рассчитать сумму возврата налога при покупке квартиры в ипотеку, вы можете воспользоваться нашим онлайн калькулятором. Также здесь вы подробнее прочтете советы по обустройству дома или квартиры.
Stevyntaw · November 6, 2023 at 4:10 am
Nicely put. Thanks a lot.
write an argumentative essay for me essay writers homework writing help service
faloimitat_fiKr · November 6, 2023 at 7:27 am
Подробное руководство по фалоимитатору
фалоимитатор [url=https://www.faloimitatorbgty.vn.ua/]https://www.faloimitatorbgty.vn.ua/[/url].
factori_rubre · November 6, 2023 at 3:53 pm
накрутка пф накрутка поведенческих http://povedencheskie-factori.ru/
REO9 · November 6, 2023 at 10:24 pm
I’m really impressed with your writing skills as well
as with the layout on your blog. Is this a paid theme or did you modify it yourself?
Either way keep up the nice quality writing, it’s rare
to see a great blog like this one these days.
Teddy · November 7, 2023 at 4:21 am
Fine info, Appreciate it!
my webpage http://www.driftpedia.com/wiki/index.php/Sveikinimai_%C4%AFvairioms_Progoms
omarovfab · November 8, 2023 at 2:26 am
На сайте https://sibvitr.ru/ есть возможность приобрести торговое оборудование от производителя по лояльным ценам. В цехах компании имеется новейшее оборудование для производства мебели. В наличии достаточно аксессуаров и материалов для срочного производства. Здесь вашему вниманию предложена мебель для офиса и дома, шкафы-купе и прихожие, детские и спальни, гардеробные и многое другое. Оставьте заявку для бесплатной консультации, и специалисты помогут подобрать торговое оборудование и мебель.
HectorMak · November 8, 2023 at 6:46 am
Regards. A lot of content!
custom essay writing what is the purpose of writing a reflective essay essay writing service ireland
shnikdog · November 8, 2023 at 2:24 pm
На сайте https://t.me/s/ratingscasino представлен рейтинг лучших онлайн казино. Играйте на реальные деньги в игровые автоматы. Здесь только проверенные и честные казино онлайн из рейтинга ТОР-10. Для многих написаны детальные обзоры с перечнем преимуществ и особенностей работы. Все казино предлагают пользователям разные условия, которые влияют на безопасность и комфорт. Перед тем, как добавить площадки в рейтинг, редакция тщательно проводит проверку и выносит итоговую оценку.
trovagrela · November 8, 2023 at 5:25 pm
На сайте https://plazmen.ru есть подробная информация о резке и сварке металла: лазером, плазмой. Здесь предложены полезные советы экспертов для начинающих сварщиков. Показан обзор материалов по плазменной сварке. В разделе сварка, рассмотрены основные виды сварок и их различия. Также на сайте есть возможность узнать, какие ТОП-6 лучших станков существуют для лазерной резки, какова температура плавления металлов, даны подробные описания и виды технологических процессов.
agen pulsa dan top up geme · November 8, 2023 at 11:28 pm
This post is really a pleasant one it assists new web people, who are
wishing for blogging.
onexbetegy_husr · November 9, 2023 at 4:00 am
Get the Best Offers at OnexBet Egypt
????? 1xbet ????????? [url=http://www.1xbetdownloadbarzen.com/]http://www.1xbetdownloadbarzen.com/[/url].
anovaenups · November 9, 2023 at 11:26 am
Install the mobile betting application dafabet app https://appbetting-dafabet.com.ru/ and increase your chances of winning. The best mobile betting app is always at your fingertips.
furniture shop singapore · November 9, 2023 at 1:31 pm
Hello, Neat post. There is an issue together with your
web site in web explorer, may check this? IE still
is the market chief and a big element of other folks will
omit your magnificent writing because of this problem.
evegSit · November 10, 2023 at 3:26 am
На сайте https://integral.tomsk.ru/catalog/luchshie_kompyutery/ вы найдете качественные компьютеры по приемлемой цене. Компания предоставляет сертифицированные товары и персональный подход к любому клиенту. Сайт предлагает вашему вниманию каталог лучших компьютеров. Здесь можно узнать, сколько стоит ПК, увидеть, как он выглядит на фотографии и выяснить его технические характеристики. При покупке компьютера в компании, вы автоматически получаете право на бесплатную гарантию в течение года. Обращайтесь, c вами мы установим дружеские отношения!
турецкие сериалы на русском · November 11, 2023 at 2:10 am
Турецкие сериалы на русском смотреть онлайн turkhit.tv
Для поклонников турецких сериалов, которые не могут жить без большого количества серий и волнующих сюжетов — мы разработали наш онлайн кинотеатр. Самый широкий каталог сериалов из Турции самых разных жанров. Приглашаем на turkhit.tv прямо сейчас.
По теме [url=https://turkhit.tv/melodramy/]турецкие сериалы мелодрамы[/url] Вы на правильном пути. Турецкие сериалы за последнее время забрали огромную востребованность за границами своей страны, в том числе и в РФ. В чем же тайна их удачи? Первоначально, это истории, наполненные напряжением и любовью, которые цепляют зрителя с первых секунд просмотра. Персонажи сериалов – активные и эмоциональные, часто оказываются впутанными в сложные жизненные ситуации, которые вызывают у зрителей сочувствие и эмпатию.
Киносценарии турецких сериалов обычно тяжелые и имеют несколько сюжетных линий. Они совмещают в себе любовные разборки, семейные трудности, несчастья и интриги, а также криминальные линии. Данный подход позволяет удерживать внимание различной аудитории, ведь любой найдет для себя что-то близкое.
Кроме того, турецкие сериалы часто затрагивают глубокие общественные и культурные темы, актуальные не только для Турции, но и для многих других стран. Это делает их не только источником развлечений, но и пищей для мыслей. Шикарные декорации, наряды и съемки в интересных локациях добавляют визуальное наслаждение и помогают зрителям углубиться в необыкновенный мир, который они создают.
Переходите смотреть [url=https://turkhit.tv/fantastika/]турецкие сериалы фантастика[/url] на следующий сайт turkhit.tv уже сейчас. Турецкие продюсеры и сценаристы не боятся творить новое с форматами и сюжетными линиями, обязательно улучшая свои техники видеосъемки и монтажа. Актерский состав часто включает в себя яркие и одаренные личности, годные на естественную передачу эмоций и создание убедительных образов.
В итоге, турецкие сериалы цепляют зрителей своей способностью рассказывать увлекательные истории, которые отражают человеческие чувства во всем их многообразии. Они открывают дверь в иностранные культуры и предлагают возможность для эмоционального отголоска, что делает их необходимой частью жизни многих поклонников сериалов.
Tour Uganda · November 11, 2023 at 10:18 pm
I every time emailed this blog post page to all my associates, since if like
to read it then my friends will too.
onstaMup · November 12, 2023 at 6:09 pm
На сайте https://abinskmedpribor.ru/ продаются товары, способные улучшить качество жизни человека. Мы предлагаем широкий выбор достойных изделий для социальных групп и приемлемую стоимость. Стараемся быть полезными для любого покупателя, пишем статьи о нашем медоборудовании, чтобы существенно упростить процесс подбора и развеять имеющиеся вопросы. Можете прямо сейчас ознакомиться с материалами. Обращайтесь, медтехника Бориса Березовского всегда рада сотрудничеству!
BrettDum · November 13, 2023 at 12:36 am
Абузоустойчивый VPS
Виртуальные серверы VPS/VDS: Путь к Успешному Бизнесу
В мире современных технологий и онлайн-бизнеса важно иметь надежную инфраструктуру для развития проектов и обеспечения безопасности данных. В этой статье мы рассмотрим, почему виртуальные серверы VPS/VDS, предлагаемые по стартовой цене всего 13 рублей, являются ключом к успеху в современном бизнесе
ehovvldot · November 13, 2023 at 7:41 am
На сайте https://taxi-tel.ru вы можете подробнее ознакомиться с актуальным справочником и сервисом для вызова такси. Здесь дана полезная информация о службах такси в каждом городе ? номера телефонов, рейтинги и отзывы, цены и тарифы, а также приложения сервисов. Самая свежая и детальная информация ждет вас. В скором времени появится раздел с промокодами. В справочнике представлено больше 1500 городов и населенных пунктов России. Вы можете самостоятельно найти сервис такси по городам России и СНГ в алфавитном порядке.
먹튀 · November 13, 2023 at 10:35 pm
Hi, its nice article regarding media print, we all be aware of media
is a impressive source of facts.
Piercesteld · November 14, 2023 at 12:01 am
LГҐn 15000 kr
Solargy.ru · November 14, 2023 at 2:31 pm
Производство световодов – важный процесс в области современных технологий естественного освещения. Компания Solargy занимается разработкой и изготовлением световодов, что можно увидеть на странице [url=https://solargy.ru/]производство световодов[/url]. Эти устройства предназначены для перенаправления солнечного света из наружной среды внутрь зданий, обеспечивая освещение в помещениях, где доступ к естественному свету ограничен.
Процесс производства световодов включает использование высококачественных материалов и передовых технологий. Основные элементы световода – это светоприемник на крыше, отражающие трубы и диффузор, распределяющий свет в помещении. Эта конструкция позволяет доставлять естественный свет в глубину здания, даже в отдаленные от окон места.
Одним из ключевых преимуществ [url=https://solargy.ru/]производства световодов[/url] компанией Solargy является их способность обеспечивать стабильное и качественное освещение при минимальном использовании электроэнергии. Это делает световоды Solargy эффективным решением для экономии ресурсов и улучшения экологической устойчивости объектов.
Световоды Solargy подходят для использования в разнообразных архитектурных проектах, включая жилые дома, офисные здания и промышленные сооружения. Их применение способствует созданию комфортной рабочей и жилой среды, улучшая общее самочувствие и производительность.
Painter · November 14, 2023 at 3:13 pm
Your style is so unique in comparison to other people I
have read stuff from. Thanks for posting when you have the opportunity, Guess I will just book mark this site.
Have a look at my blog Painter
v_shalki_ifEl · November 14, 2023 at 3:20 pm
Вигідні умови для покупки дерев’яних вішалок для одягу
вішалка для одягу стояча [url=derevjanivishalki.vn.ua]derevjanivishalki.vn.ua[/url].
eleznGob · November 14, 2023 at 3:25 pm
На сайте https://realty.store/ это это международный портал, на котором вы найдете недвижимость на любой вкус в разных странах для аренды и покупки. Вы сможете выбрать недвижимость по странам, посмотреть новые проекты, узнать о застройщиках, ознакомиться с ценами на квартиры, апартаменты, дома, таунхаусы или воспользоваться поиском.
evajaSable · November 14, 2023 at 4:20 pm
gbisp.ru – сайт, где можно приобрести железобетонные изделия по приемлемым ценам. Многолетний опыт и огромное число радостных клиентов, дает возможность компании быть самой лучшей среди авторитетных на рынке железобетонных изделий. Интересуют вопросы на такую тему как: цокольные панели бетонные серии пц и пцт? Новейшее оборудование и регулярные лабораторные проверки гарантируют высокое качество бетона. Детальнее ознакомиться с товарами и достоинствами компании можно на портале. С помощью удобного поиска по каталогу можно быстро выбрать необходимую информацию. Закажите обратный звонок, и грамотные консультанты помогут вам в выборе изделий.
itaArtFraks · November 14, 2023 at 8:48 pm
На сайте https://melangers.ru можно купить меланжер для шоколада по привлекательной цене. Здесь рекомендована лучшая продукция и запасные части с гарантией. Для каждого клиента, по всей территории РФ, предложен оптимальный вариант доставки. На всю продукцию, гарантия ? 1 год. Предлагаются разные способы оплаты: наличная, безналичная и картой. Для того чтобы получить бесплатную доставку, оставьте заявку на сайте. Подробнее ознакомиться с продукцией можно здесь же. Если остались вопросы по товару, звоните, специалисты с удовольствием вас проконсультируют.
autocad · November 14, 2023 at 9:30 pm
Very good site you have here but I was curious about if you knew of any discussion boards that cover the same topics talked about in this article? I’d really love to be a part of online community where I can get responses from other knowledgeable individuals that share the same interest. If you have any recommendations, please let me know. Kudos!
rbunosap · November 14, 2023 at 11:53 pm
Ищите необходимые медицинские препараты по доступной стоимости? В этом вам поможет наш полезный сервис, который работает на все 100%. aptekamos.ru – лекарства в москве позволяет выбрать медикаменты дешевле, а аптеку ближе. Портал создан для обычных людей, он простой и показывает исключительно актуальные цены. Мы сделали поиск и заказ лекарств легким, чтобы эти задачи у вас не отнимали драгоценное время и силы. Данные о наличии лекарств предоставляют аптеки и обновляются по нескольку раз в день. Давайте экономить вместе с нами!
Willierog · November 15, 2023 at 5:26 am
Hi there, I found your website via Гугл while searching object of a allied point, your website came up, it looks great. I have bookmarked it in my google bookmarks.
kovaIJed · November 15, 2023 at 7:25 am
На сайте https://bus-b.ru вы можете заказать услугу аренды автобуса по привлекательным ценам. Обращаясь в компанию, вы сэкономите свои силы и драгоценное время. Сотрудники возьмут на себя все заботы по подбору автобуса, водителя, а также разработке маршрута. Все водители обладают многолетним опытом вождения, поэтому вы можете не переживать за безопасность. Пассажирам предложены отличные условия для комфорта. Закажите автобус на сайте и наслаждайтесь приятным путешествием.
ovyarEnast · November 15, 2023 at 8:45 am
На сайте https://smmrise.com/ вы можете купить SMM-услуги по доступной стоимости. Здесь помогут вам сэкономить на интернет-продвижении. Ваши заказы будут доставлены максимально оперативно. Вы останетесь довольны качеством SMM-услуг. Здесь предложено множество вариантов пополнения вашего аккаунта. Чтобы оформить заказ, создайте учетную запись и войдите в систему. Внесите денежные средства, удобным для вас способом. Оформите заказ и наслаждайтесь великолепными результатами!
JamesTig · November 15, 2023 at 4:57 pm
[url=https://megapolis.sbs]Купить онлайн мяу кристалл Миасс[/url] – Заказать мяу мука Челябинск, Где купить кристаллы Челябинск
Hectorflord · November 15, 2023 at 9:03 pm
Stumbled upon an interesting article – I suggest you take a look http://leydis16.phorum.pl/posting.php?mode=newtopic&f=1
larisalsicky · November 15, 2023 at 10:29 pm
На сайте https://taker.website вы отыщите слоты, покер, рулетку, которые гарантируют не только удивительные ощущения, но и крупные выигрыши. Здесь заботятся об игроках, предоставляют щедрые бонусы и промо-коды. Вам будут предложены самые лучшие условия. Поддержка тут приветливая, мгновенно отвечает и проблемы успешно решает. Тейкер ? казино, обеспечивающее высокий уровень безопасности для данных и финансов, вы можете играть с уверенностью. Удовлетворите жажду азарта!
aisaetrata · November 16, 2023 at 3:09 am
На сайте https://vehrrxcso.ru предлагается огромный выбор увлекательных игр, и предоставляются щедрые акции. Здесь есть возможность не только поиграть в удовольствие, но и заработать достойные денежные средства. Тут совсем не задерживают выплаты, что касается поддержки, она отзывчивая и всегда быстро отвечает. Тейкер гарантирует честность игры, поэтому у данного казино много поклонников, кстати, вы можете стать одним из них. Расслабьтесь и прекрасно проведите свое свободное время!
RussellEffon · November 16, 2023 at 12:48 pm
Came across an intriguing article – it’s worth your attention, trust me https://successionwiki.co.uk/index.php/Торговля_СЃ_Легкостью:_Разнообразие_Товаров_РЅР°_Нашей_Площадке
https://crazysale.marketing/ · November 16, 2023 at 4:39 pm
What a stuff of un-ambiguity and preserveness of precious experience concerning unexpected feelings.
DarrellPap · November 16, 2023 at 9:50 pm
Discovered a unique article – recommended to acquaint yourself! https://cptd.onedu.ru/mntorng/mdiscuss/index.php?PAGE_NAME=profile_view&UID=196181
vladiwaway · November 17, 2023 at 12:59 pm
На сайте https://jet-s.ru вы можете заказать любую раскрутку в соц.сети. Здесь вам помогут провести рекламную компанию по разным объектам и выполнить необходимые работы. Консультация осуществляется в любое время. Специалисты сервиса проверяют корректность каждого заказа перед запуском. Это гарантированное качество и выполнения в сжатые сроки. На сайте необязательна регистрация. Любой заказ лучше сделать через автоматическую форму, при этом сразу оплачивая услугу. Портал регулярно обновляется, дополняется разным софтом и программами.
GhoukasMousy · November 18, 2023 at 6:02 am
You actually mentioned this very well!
free chip casino no deposit red dog casino bonus casino free chip
наркология на дом · November 18, 2023 at 8:18 am
I am extremely inspired together with your writing skills and alsosmartly as with the format for your blog. Is this a paid subject or did you customize it yourself? Either way stay up the nice quality writing, it’s rare to see a nice blog like this one these days..
Займы онлайн · November 19, 2023 at 2:14 pm
Иногда финансовая неотложность не знает времени суток, и в таких ситуациях круглосуточные займы могут стать спасением. На нашем портале МИР-ЗАЙМОВ.РФ мы собрали обширный список МФО, которые предоставляют услуги в любое время суток. Теперь вы можете получить необходимый займ даже ночью или в выходные дни, без ограничений по времени.
ChetwynElata · November 19, 2023 at 2:37 pm
Cheers. Plenty of facts.
online blackjack fake money [url=https://reddog-casinos.website/#]is reddog casino legit[/url] free blackjack games offline
Allie · November 19, 2023 at 5:52 pm
%%
Here is my web-site https://oncasino-10top7.win
evrusduh · November 19, 2023 at 6:03 pm
Сайт https://5earn.com/ – это платформа, предназначенная для обучения заработку в интернете. Он предлагает обучающие материалы, отзывы о проектах и уникальные инструменты для развития онлайн-деятельности. Пользователи могут зарабатывать внутреннюю валюту платформы – Fiveearn – за активное участие в жизни сообщества. Эту валюту нельзя купить, её можно только заработать на сайте. Она используется для покупки обучающих материалов, книг, курсов, сертификатов, шаблонов, плагинов и скриптов. Fiveearn создана для стимулирования активности пользователей и обмена на материалы на сайте. Пользователи зарабатывают валюту за добавление новостей, участие в обсуждениях, комментирование, время, проведённое на сайте, и посещение различных страниц сайта. Есть реферальная программа
Kenneth · November 19, 2023 at 6:23 pm
%%
my web site – http://forum.bhl-fanclub.de/viewtopic.php?f=3&t=2034&sid=65713ca6dac596bf11d72b790e290782
lentinerony · November 19, 2023 at 7:51 pm
На сайте https://rybalkanareke.ru/ вы узнаете все о ловле рыб, о ее предпочтениях и повадках. Опытные рыболовы-эксперты расскажут вам, какие приманки, снасти, прикормки и методы ловли существуют. Здесь вы найдете рыбацкие вкусные рецепты и получите ответы на все интересующие вас вопросы. Информация на сайте регулярно обновляется, чтобы вы были в курсе последних новостей и тенденций в мире рыболовства. Данный сайт – настоящая находка среди любителей этого завлекательного хобби.
Free concrete quotes · November 19, 2023 at 8:50 pm
Hi there all, here every person is sharing such experience, therefore it’s fastidious to read
this blog, and I used to pay a visit this blog daily.
Russellreoto · November 19, 2023 at 9:25 pm
win79
win79
http://Printguiden.dk/redirmediainfo.aspx?MediaDataID=970bd50d-e0ba-4bee-b5d8-39ac41ac122d&URL=https://www.getyourpros.com/indonesia/pekan-baru/hardware/gbo777/28125/riau · November 19, 2023 at 10:30 pm
Wow, this article is good, my sister is analyzing these
kinds of things, therefore I am going to inform her.
ObmenTinkofffinnagt · November 19, 2023 at 10:52 pm
Здесь можно выгодно и быстро [url=https://exchanger24.org/xchange_btc_to_tnk/]обменять Биткоин на Тинькофф[/url]
RobertSlaph · November 19, 2023 at 11:04 pm
sub bot online
sofa nhập khẩu · November 20, 2023 at 12:14 am
Hey very nice blog!
продам авто недорого срочно · November 20, 2023 at 12:39 am
Нужно срочно продать автомобиль, но не знаете с чего начать? Не беспокойтесь! Мы предлагаем вам идеальное решение, чтобы [url=https://xn—-8sbec6a3aezg.xn--p1ai/]продать машину срочно[/url]. С нашей помощью вы сможете быстро и без хлопот продать ваш автомобиль, получив при этом хорошую сумму.
hmarinMoups · November 20, 2023 at 6:17 am
На сайте http://cashrule.ru/ вы найдете полезные статьи. Главная цель проекта – предоставить вам максимум актуальной и познавательной информации. Здесь вы узнаете секреты заработка в сети, о которых, возможно вам, никогда не говорили. Также тут рассказывается о том, где взять срочно денежные средства, как правильно планировать семейный бюджет и избавиться от постоянных долгов. Изучайте прямо сейчас инструкции о том, куда инвестировать в интернете. Cashrule желает вам удачных инвестиций!
Jinviq · November 20, 2023 at 11:38 am
order calcitriol online buy trandate for sale buy fenofibrate online
multisplit_yfka · November 21, 2023 at 8:56 am
Мультисплит | Суперпростой мультисплит | Мультисплит для начинающих | Мультисплит для профессионалов | Лучшие мультисплиты 2021 | Как работает мультисплит | Мастер-класс по мультисплиту | Шаг за шагом к мультисплиту | Мультисплит: эффективный инструмент веб-аналитики | Увеличьте конверсию с помощью мультисплита | Все, что нужно знать о мультисплите | Интеграция мультисплита на ваш сайт | Как выбрать лучший мультисплит | Мультисплит: лучшее решение для тестирования | Как провести успешный мультисплит | Секреты успешного мультисплита | Мультисплит: инструмент для роста бизнеса | Обзор лучших мультисплитов на рынке | Как использовать мультисплит для улучшения сайта | Мультисплит vs A/B тестирование: кто выигрывает?
мульти сплит система цена [url=https://www.multi-split-systems.ru/]https://www.multi-split-systems.ru/[/url].
novaapak · November 22, 2023 at 9:42 am
На сайте https://xn--54-6kclv6bgi1b.xn--p1ai/ предлагают газовые котлы и к ним комплектующие по оптимальной стоимости. Здесь радуют клиентов и улучшают качество сервиса. Предоставляют гарантию на всю технику и организовывают быструю доставку заказов. Высококвалифицированные специалисты при необходимости помогут вам в выборе необходимого оборудования и предложат наилучшие решения. У них можете уточнить цены на заинтересовавший товар. Выбирая «ГазПрофСервис», вы принимаете правильное решение!
Gracefluro · November 22, 2023 at 2:25 pm
Онлайн казино на реальные деньги для андроид
Онлайн казино на реальные деньги для андроид
Ronaldrep · November 22, 2023 at 8:49 pm
Found captivating reading that’s worth your time – take a look https://fuss.forumkz.ru/viewtopic.php?id=1894#p3281
velnodaf · November 23, 2023 at 2:41 am
На сайте https://homedelivery24dubai.com/ есть возможность заказать доставку алкоголя на дом на любой вкус. Это намного упрощает и время и силы, ведь теперь не нужно выходить из апартаментов либо ездить по окрестностям, вы можете с легкостью выбрать из большого ассортимента брендов алкоголь и совершить оплату с помощью смартфона. Здесь представлен огромный выбор алкогольных напитков по выгодной цене и с оперативной доставкой, убедитесь в этом сами! Подробное описание и цены можно увидеть на сайте.
www.kwconnect.com · November 23, 2023 at 9:59 am
Hi there, You have done a fantastic job. I’ll certainly digg it and personally
recommend to my friends. I am confident they’ll be benefited from this website.
Gracefluro · November 23, 2023 at 7:01 pm
Онлайн казино на реальные деньги для андроид
Онлайн казино на реальные деньги для андроид
GhusunCap · November 23, 2023 at 7:35 pm
You have made your point!
bc lions last game bc game no deposit bonus bc game trustpilot
Robertlaure · November 23, 2023 at 8:00 pm
http://www.apn-spb.ru/news/article37607.htm
cazkaChare · November 23, 2023 at 8:07 pm
На сайте https://homedelivery24dubai.com/ есть возможность заказать доставку алкоголя с гарантией качества. Ассортимент напитков достаточно широкий, здесь вы найдете текилу, вино, бризер, водку, джин и многое другое по привлекательным ценам. Наш основной девиз – это оперативная доставка и высокое качество. Также среди ценностей – забота, уважение и внимание к желаниям клиента. Оформите заказ на любой товар из нашей линейки алкогольных напитков на сайте в ватсапе. Отдыхайте и наслаждайтесь вкусными напитками вместе с нами!
Gracefluro · November 23, 2023 at 9:07 pm
Онлайн казино на реальные деньги для андроид
https://gozee.ru/
Robertlaure · November 23, 2023 at 9:58 pm
https://www.deafnet.ru/info.php?c=375&id=6328
rojkovLab · November 24, 2023 at 12:38 am
На сайте https://promuzhskoe.ru/ предложена честная и завлекательная информация для мужчин, которые знают, чего хотят. Здесь поднимаются вопросы про интимное здоровье женщин и мужчин. Читатели портала ? люди разного возраста и пола, их объединяет одно, и это здоровье. Эксперты сайта расскажут о ключевых факторах мужского здоровья. Здесь есть возможность найти самые различные материалы, от того как лучше целовать девушку и до рекомендаций, по сохранению мужской силы в преклонном возрасте. Выберите рубрику на портале и читайте полезные статьи о здоровье.
Robertlaure · November 24, 2023 at 12:49 am
https://znamkaluga.ru/articles/vozmozghno_li_oformit_zaym_onlayn_studentu____bustrodengi.html
Robertlaure · November 24, 2023 at 7:47 am
https://perm.rosfirm.ru/companies_news/gde-vzyat-dengi-onlajn-esli-ne-hvataet-do-zarplaty-n788957.htm
Robertlaure · November 24, 2023 at 8:47 am
http://consumerworld.ru/PressRelease/PressReleaseShow.asp?id=760178
vrilovKnodo · November 24, 2023 at 6:13 pm
Мистер Шрус – автомаркет, который предоставляет исключительно лучшие запчасти, их можно заказать и подобрать за пару кликов. Магазин работает 24/7 и уже завоевал доверие среди многих автолюбителей. Саппорт здесь предлагает грамотные консультации и заинтересована в том, чтобы любой клиент приобрел доступные запчасти для автомобиля в сжатые сроки. Ищите авто инструменты купить? Mr-shrus.ru – сайт, где представлен каталог, ознакомиться с ним возможно уже сейчас. Вы в любое время можете подписаться на акции и первым получать информацию о спецпредложениях.
Tristansteld · November 24, 2023 at 11:53 pm
proventil
vakritow · November 25, 2023 at 5:17 am
Желаете скачать любимую музыку абсолютно бесплатно и в хорошем качестве? Lightaudio поможет вам в этом, портал имеет крутой дизайн, и самое главное – не требует регистрации. Здесь вы найдете огромный музыкальный каталог. Перед загрузкой композиций можете их послушать онлайн напрямую на сайте. Ищите музыка новинки слушать бесплатно мр3? LightAudio.ru – ресурс, на который стоит обратить внимание. Он максимально простой, на основной странице представлены лучшие новинки за последнюю неделю, слушайте и скачивайте их уже сейчас. Музыкальные треки ждут вас, качество звучания их на высоте!
odiontah · November 25, 2023 at 10:44 am
На сайте https://zamok-ok.ru вы можете заказать услугу по вскрытию и установке замков в Калининграде по честным ценам. На материалы предоставляется гарантия. Детали все хорошего качества. Оговоренная цена по итогу работ не увеличивается. Компания применяет грамотную ценовую политику, что дает возможность устанавливать более выгодные цены на вскрытие, замену и ремонт замков. Мастера выезжают по заявкам круглосуточно. Все работы выполняются в сжатые сроки. Безопасность – основной приоритет компании.
интернет магазин автозапчастей · November 26, 2023 at 12:01 am
I will right away grasp your rss as I can not in finding your email subscription link or newsletter service. Do you have any? Please permit me understand so that I may subscribe. Thanks.
tepanEntib · November 26, 2023 at 12:29 am
Компания М-Строп предлагает новейшее грузоподъемное оборудование и взаимовыгодные условия для постоянных заказчиков. Вся предоставляемая продукция высочайшего качества. Клиенты компании оставляют о ней и о быстроте исполнения заказов, лишь доброжелательные отзывы. Ищите стропы канатные 4ск? M-Strop.by – сайт, где имеется электронный каталог и контактная информация. Позвоните прямо сейчас опытным специалистам, они помогут с выбором нужной продукции и оформлением заявки. Также можете у них уточнить стоимость и сроки доставки заказа.
orovaGlava · November 26, 2023 at 1:15 am
На сайте https://slc-company.ru предлагают бухгалтерские услуги, стоимость их минимальна. В компании работает команда профессионалов, которые готовы помочь вашему бизнесу. Специалисты имеют достаточный опыт работы, проходят специальное обучение, быстро решают даже нестандартные задачи и гарантируют конфиденциальность. Сотрудникам можете доверить вопросы любой сложности, договоренности ими будут выполнены в срок в полном объеме. Звоните менеджерам прямо сейчас!
ремонт сантехники краснодар · November 26, 2023 at 8:01 am
Hi there! I just wanted to ask if you ever have any trouble with hackers? My last blog (wordpress) was hacked and I ended up losing many months of hard work due to no backup. Do you have any solutions to prevent hackers?
789bet · November 26, 2023 at 5:16 pm
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet 789bet
789bet 789bet 789bet 789bet 789bet
KennethBeine · November 27, 2023 at 6:05 am
https://s1.moresliv.biz/
rolevwhari · November 27, 2023 at 9:05 pm
На сайте https://play.google.com/store/apps/details?id=com.sportsl1des.riughtimes можно делать ставки на спорт онлайн без преград. Здесь постоянно проводятся акции и розыгрыши, что, безусловно, радует игроков. Пользователи могут делать ставки, как с ПК, так и со смартфона или планшета. Скачать можно на любое устройство на базе Android или IOS. Чтобы приобрести приятное предложение от данного БК потребуется регистрация на сайте. Регулярно пополняется раздел с разными призами и акциями.
Andrewuniop · November 27, 2023 at 10:45 pm
https://bookmakerskachat.ru/
ozeroencuh · November 27, 2023 at 11:04 pm
On the website https://minecraft-serveurs.com/ you can find a complete list of Minecraft servers. Browse our list of Minecraft servers and join the gaming community. Find your ideal Minecraft server and enjoy the game.
manovAribe · November 28, 2023 at 4:17 am
Портал «Fairless» предлагает богатый выбор купонов на скидку, промокодов, чтобы ваша покупка была более выгодной и приятной. Внушительный ассортимент предложений, представленный на https://fairless.ru/ позволит получить скидку на определенную группу товаров: электронику, продукцию для дома, игры, консоли, обувь, одежду, красота и здоровье. Получайте промокоды в любом количестве и абсолютно бесплатно.
ковры 3 на 4 · November 28, 2023 at 2:37 pm
Pretty portion of content. I simply stumbled upon your website and in accession capital to claim that I acquire in fact enjoyed account your blog posts. Any way I’ll be subscribing for your augment or even I achievement you access consistently fast.
Alaska Fake id · November 28, 2023 at 3:23 pm
Do you have a spam issue on this blog; I
also am a blogger, and I was wondering your situation; we have created some nice practices and we are looking to
exchange techniques with other folks, please shoot me an e-mail if interested.
Feel free to visit my page; Alaska Fake id
AnthonyRog · November 28, 2023 at 4:49 pm
Great dispatch on the other hand , I was leaving much to be desired to be acquainted with if you could jot a litte more on this subject? I’d be very beholden to if you could painstaking a toy particle further. Adore you!
Russellreoto · November 28, 2023 at 5:25 pm
custom mountain bike jersey
sporttovar_tfKa · November 28, 2023 at 5:34 pm
с активной в интернет-магазине
спорттовары для занятий фитнесом по выгодным ценам в нашем магазине
Качество и комфорт в каждой детали инвентаря в нашем ассортименте
Инвентарь для спорта для начинающих и профессиональных спортсменов в нашем магазине
Ненадежный инвентарь может стать препятствием во время тренировок – выбирайте качественные аксессуары в нашем магазине
Инвентарь для занятий спортом только от ведущих производителей с гарантией качества
Улучшите результаты тренировок с помощью инвентаря из нашего магазина
спорттоваров для самых популярных видов спорта в нашем магазине
Отличное качество аксессуаров по доступным ценам в нашем интернет-магазине
Удобный поиск и спорттоваров в нашем магазине
Специальные предложения и скидки на спорттовары для занятий спортом только у нас
Прокачайте свои спортивные качества с помощью спорттоваров из нашего магазина
Большой выбор товаров для любого вида спорта в нашем магазине
Проверенный инвентарь для тренировок спортом для мужчин в нашем магазине
спорттоваров уже ждут вас в нашем магазине
Не пропускайте тренировки с помощью инвентаря из нашего магазина
Низкие цены на аксессуары в нашем интернет-магазине – проверьте сами!
Большой выбор для любого вида спорта по самым низким ценам – только в нашем магазине
Спорттовары для амбициозных спортсменов и любителей в нашем магазине
спортивный инвентарь [url=http://www.sportivnyj-magazin.vn.ua]http://www.sportivnyj-magazin.vn.ua[/url].
cazinouri · November 28, 2023 at 7:58 pm
[url=https://cazinouri-online-straine-din-ro.com]cazinouri-online-straine-din-ro.com[/url]
Rating of the best online casinos – play slot machines for the benefit of existent money. Verified and legitimate online casinos from the MERIDIAN 10 rating.
cazinouri-online-straine-din-ro.com
aMarbor · November 28, 2023 at 10:31 pm
На сайте https://yootzyv.com/ вы сможете ознакомиться с тысячами реальных отзывов о компаниях и специалистах. Если вам необходимо пожаловаться на низкий уровень сервиса или товара вы всегда сможете сделать это на сайте. Знакомьтесь и с чужими отзывами, чтобы знать о надежности организации или оказываемой услуге.
EugeneSnise · November 28, 2023 at 10:34 pm
https://s1.slivbox.me/
Raymundo · November 29, 2023 at 4:35 am
%%
my homepage https://www.befactor.ru/
kovrik_skOr · November 29, 2023 at 7:31 am
Советы по улучшению сцепления коврика для занятий йогой
коврик для йоги [url=kovriki-joga-fitnes.vn.ua]kovriki-joga-fitnes.vn.ua[/url].
levaocag · November 29, 2023 at 5:50 pm
The site https://doctranslator.com/ is a free document translator. You can translate large PDF, Word, Excel, PPTX files using a free online document translator into a huge number of languages.
Naninewes · November 29, 2023 at 7:20 pm
Awesome material. Thank you.
как ставить бонусы в 1win luckyjet 1win вывод с 1win
harmonic sounds for balance · November 30, 2023 at 1:54 am
What’s up, I read your new stuff regularly.
Your story-telling style is awesome, keep doing what you’re doing!
Russellreoto · November 30, 2023 at 3:28 am
slot gacor gampang menang
[url=https://www.mvno-academy.com/hallo-welt/#comment-4186]slot gacor gampang menang[/url] 927759f
Slot Gacor telah menciptakan fenomena baru dalam dunia slot online, tidak sekadar menjadi istilah biasa, melainkan sebuah jaminan meraih kemenangan dengan menawarkan pengalaman permainan slot yang memikat dengan minimal deposit 5rb.
Bermain di situs slot gacor yang dapat dijamin amanah bukan hanya memberikan hiburan semata, tetapi juga membuka peluang meraih jackpot terbesar yang sebelumnya mungkin sulit dicapai atau bahkan tidak pernah terwujud.
Pengalaman Game Slot Gacor: Lebih Dari Sekadar Hiburan
Slot Gacor bukanlah sekadar permainan slot biasa. Ia menciptakan atmosfer yang berbeda, memanjakan pemain dengan sensasi bermain yang luar biasa dan menawarkan harapan kemenangan yang lebih tinggi. Dengan desain yang menarik dan fitur-fitur inovatif, setiap putaran menjadi pengalaman yang tak terlupakan.
Strategi Bermain untuk Meningkatkan Peluang Kemenangan
Meskipun slot gacor dikenal dapat meningkatkan peluang kemenangan, penting bagi pemain memiliki beberapa strategi untuk memaksimalkan potensi kemenangan mereka. Beberapa strategi yang dapat diadopsi antara lain:
1. Pemilihan Provider Game yang Tepat
Pemilihan provider game slot online yang tepat menjadi langkah awal yang krusial. Pastikan memilih provider yang memiliki reputasi baik dan menawarkan variasi game slot gacor terbaik.
2. Pahami Return to Player (RTP) Tertinggi
Mengetahui tingkat Return to Player (RTP) tertinggi pada setiap permainan slot dapat menjadi kunci kesuksesan. Pilihlah game dengan RTP tinggi untuk meningkatkan peluang meraih kemenangan.
Slot Gacor Malam Ini: Temukan Keberuntungan Anda
Setiap malam, dunia slot gacor menyajikan kejutan-kejutan baru. Untuk menjadi bagian dari aksi malam ini, pastikan untuk mengikuti bocoran pola slot gacor yang telah disiapkan. Ini dapat menjadi kunci untuk membuka pintu ke sesuatu yang lebih besar dan meraih kemenangan yang menarik.
Jadi, jangan ragu untuk bergabung dan bermain di slot gacor hari ini. Saksikan sendiri bagaimana pengalaman bermain dapat menjadi lebih dari sekadar hiburan, melainkan sebuah peluang untuk meraih kemenangan besar. Selamat bermain dan semoga keberuntungan selalu berada di pihak Anda!
Sladkiye-Strasti · November 30, 2023 at 11:16 am
В поисках чего-то особенного для разнообразия своей личной жизни, я обратился к sladkiye-strasti.ru и был удивлён количеством интересных предложений. Особенно привлекли моё внимание [url=https://sladkiye-strasti.ru/]интим игрушки[/url] , которые оказались именно тем, что я искал. Впечатляет уровень сервиса и анонимность доставки, что немаловажно для таких покупок.
Raymondbus · November 30, 2023 at 5:03 pm
kantorbola
Kantorbola adalah situs slot gacor terbaik di indonesia , kunjungi situs RTP kantor bola untuk mendapatkan informasi akurat slot dengan rtp diatas 95% . Kunjungi juga link alternatif kami di kantorbola77 dan kantorbola99
домашние цветы картинки · November 30, 2023 at 5:50 pm
I think this is one of the most important information for me. And i’m glad reading your article. But wanna remark on few general things, The website style is ideal, the articles is really nice : D. Good job, cheers
Tarynntag · December 1, 2023 at 4:09 pm
Thanks a lot! Loads of postings.
1xbet мобильное приложение скачать 1xbet официальный сайт букмекерская компания 1xbet
remont-kvartir-brovari.kyiv.ua/ · December 2, 2023 at 3:08 am
Обновление жилья — наша специализация. Исполнение ремонтных услуг в сфере жилья. Мы предлагаем реставрацию дома с гарантированным качеством.
[url=https://remont-kvartir-brovari.kyiv.ua/]фоп самойленко[/url]
Cecilpreax · December 2, 2023 at 12:32 pm
компания +по перевозке животных
dmilafes · December 3, 2023 at 12:23 am
На сайте https://www.hochzeitsfotograf-trevla.de/ предложены услуги свадебного фотографа по разумным ценам. Он сделает уникальные и качественные свадебные фотографии в виде репортажа. Вы можете выбрать фотографа для свадьбы и заказать его услуги по телефону на сайте уже сейчас. Также на портале представлены галерея и цены. Фотограф ценит эмоциональные и яркие фотографии, передающие атмосферу праздника и демонстрирующие, насколько было весело и хорошо. Индивидуальный подход и гарантия качества – вот основные критерии фотографа.
бизнес курсы для руководителей · December 3, 2023 at 4:37 am
Hi, I do believe this is an excellent web site. I stumbledupon it 😉 I am going to return once again since I book marked it. Money and freedom is the best way to change, may you be rich and continue to help other people.
riilukimow · December 3, 2023 at 4:01 pm
Скачать пари https://pariskachat.ru/ для ставок на букмекерские конторы. Пари скачать очень просто и пользоваться приложением там, где вам удобно. Pari скачать на любое устройство, установить приложение, пройти регистрацию и получить бонус. Скачать pari, чтобы быть в курсе всех спортивных событий.
Tarynntag · December 3, 2023 at 11:40 pm
You mentioned this effectively.
промокод 1xbet для старых игроков mobile 1xbet 1xbet на андроид последняя версия бесплатно
Cecilpreax · December 4, 2023 at 7:41 am
slot gacor gampang menang
slot gacor gampang menang
evantvap · December 4, 2023 at 3:29 pm
На сайте https://roofs-technology.com закажите расчет стоимости реконструкции, строительства либо ремонта крыши, монтажа мансардных окон, выполнения кровельных работ. После того, как будет получен запрос, то компетентный, квалифицированный менеджер в обязательном порядке вам перезвонит для согласования деталей. Все работы выполняются по ГОСТу, в соответствии с самыми высокими требованиями. Сотрудники постоянно проходят повышение квалификации, чтобы следовать актуальным тенденциям. Будет согласован выезд специалиста.
prostitutki-moskvyLen · December 4, 2023 at 7:53 pm
[url=https://samye-luchshie-prostitutki-moskvy.top]https://samye-luchshie-prostitutki-moskvy.top[/url]
Tndgwy · December 5, 2023 at 9:10 am
zithromax for sale cheap gabapentin 100mg order gabapentin 600mg without prescription
Ron Spinabella · December 5, 2023 at 9:46 am
Your blog site has become my go-to for trusted details on this target.
Maintain up the wonderful work.
Here is my web blog … Ron Spinabella
Скупка авто Таллинн · December 5, 2023 at 9:49 am
Do you have a spam issue on this website; I also am a blogger, and I was curious about your situation; many of us have created some nice procedures and we are looking to trade strategies with other folks, why not shoot me an e-mail if interested.
PabloExclusiveKiwidup · December 5, 2023 at 10:21 am
Vous pouvez acheter ces sachets [url=https://killapods.eu/fr/product/pablo-exclusive-kiwi/]Pablo Exclusive Kiwi[/url] pour un bon prix.
PabloPassionFruitdup · December 5, 2023 at 10:26 am
Je recommande cette très belle pochette [url=https://killapods.eu/fr/product/pablo-exclusive-passion-fruit/]Pablo Exclusive Passion Fruit[/url]
Tarynntag · December 5, 2023 at 11:00 am
Thanks, I value this!
скачать приложение 1xbet последнюю версию [url=https://zerkalo-1xbet.website/#]скачать 1xbet автоматы[/url] 1xbet скачать iphone
Bqnvkn · December 5, 2023 at 11:31 am
best drug to treat reflux feeling nauseous after taking antibiotics medicine for excessive farting
Hosting_cmEn · December 5, 2023 at 1:12 pm
Хостинг сайтов|Лучшие варианты хостинга|Хостинг сайтов: выбор специалистов|Надежный хостинг сайтов|Как выбрать хороший хостинг|Хостинг сайтов: какой выбрать?|Оптимальный хостинг для сайта|Хостинг сайтов: рекомендации|Лучший выбор хостинга для сайта|Хостинг сайтов: секреты выбора|Надежный хостинг для сайта|Хостинг сайтов: как не ошибиться с выбором|Выбирайте хостинг сайтов с умом|Лучшие хостинги для сайтов|Какой хостинг выбрать для успешного сайта?|Оптимальный хостинг для вашего сайта|Хостинг сайтов: важные критерии выбора|Выбор хостинга для сайта: советы профессионалов|Надежный хостинг для развития сайта|Хостинг сайтов: лучший партнер для вашего сайта|Как выбрать хостинг, который подойдет именно вам?
Хостинг сайтов в Беларуси [url=hostingbelarus.ru]hostingbelarus.ru[/url].
Keri · December 5, 2023 at 2:19 pm
I have been browsing online more than 2 hours today, yet I never found any interesting article like yours. It’s pretty worth enough for me. In my view, if all webmasters and bloggers made good content as you did, the internet will be much more useful than ever before.
My web page – https://remingtonvqiyo.blogars.com/20934170/eccentric-tome-minecraft-options
elovfisozy · December 5, 2023 at 2:21 pm
На сайте https://pluryal.info/ закажите уникальные и высокотехнологичные препараты для инъекций, которые считаются результатом последних разработок. Филлеры отличаются премиальным европейским качеством, на рынке находятся более 13 лет, что позволило себя зарекомендовать с положительной стороны. На препараты есть международные сертификаты качества, подтверждающие полную безопасность и качество. Прямо сейчас вы сможете подать заявку на сотрудничество. При этом каждый врач почувствует комфорт во время процедуры, а пациент – полную безопасность.
LourdesGuack · December 5, 2023 at 2:26 pm
online casino illegal in usa
online casinos accepting usa visa
virtual casino city [url=https://trusteecasinos2024.com/]best online gambling site us[/url] online mobile casino gambling casino internet reputable best bet online casino
play jackpot party casino online
tamarvax · December 5, 2023 at 2:56 pm
На сайте https://monolit-krasnodar.ru/ вы сможете заказать памятники гранитные, стандартные, а также вертикальные, горизонтальные, с привлекательным и изысканным оформлением. Также возможно производство мраморных памятников. Дизайн остается на ваш выбор. Все конструкции производятся из современных, прочных и надежных материалов, которые никогда не утратят своего внешнего вида, технических характеристик. Прямо сейчас вы сможете ознакомиться со всем каталогом, а также получить консультацию.
nikovNek · December 5, 2023 at 3:17 pm
На сайте https://garant-plus.ru/ предлагаются услуги от агентства недвижимости по приемлемым ценам. С помощью квалифицированных специалистов вы сможете купить элитную недвижимость, а также приобрести жилье эконом-класса. В базе недвижимости содержится большое количество предложений. Специалисты агентства подберут оптимальный вариант и оформят сделку максимально быстро и надежно. Подробнее ознакомиться с услугами можно на сайте. Также здесь есть поиск по каталогу недвижимости, который поможет вам найти то, что нужно.
ShirleyHoada · December 5, 2023 at 3:18 pm
онлайн казино Аврора
официальный сайт казино Аврора
Ortopedich_bbEi · December 5, 2023 at 3:29 pm
Защита и удобство с ортопедическими стельками
индивидуальные ортопедические стельки [url=ortopedicheskie-stelki-2023.ru]ortopedicheskie-stelki-2023.ru[/url].
amariMal · December 5, 2023 at 5:08 pm
Пари скачать на айфон на сайте https://skachatpari.ru/ а также получить подробную инструкцию по установке приложения букмекера. Пари скачать очень просто и пользоваться приложением там, где вам удобно. Pari скачать на любое устройство, установить приложение, пройти регистрацию и получить бонус. Скачать pari и начать работать с приложением – узнайте подробнее на сайте.
Tarynntag · December 6, 2023 at 12:54 am
You said this fantastically!
1xbet скачать 2024 на андроид [url=https://zerkalo-1xbet.website/#]1xbet официальный сайт вход в личный кабинет[/url] скачать бк 1xbet
Russellreoto · December 6, 2023 at 10:15 am
1. C88 Fun – Your Gateway to Boundless Entertainment!
More than a gaming platform, C88 Fun is an adventure beckoning to be explored. With its intuitive interface and an eclectic selection of games, C88 Fun caters to all tastes. From classic favorites to cutting-edge releases, C88 Fun ensures that every player finds their gaming haven.
2. JILI & Evo 100% Welcome Bonus – A Warm Welcome for Newcomers!
Embark on your gaming journey with a warm embrace from C88. New members are greeted with a 100% Welcome Bonus from JILI & Evo, doubling the excitement right from the start. This bonus acts as a catalyst for players to delve into the diverse array of games available on the platform.
3. C88 First Deposit Get 2X Bonus – Doubling the Excitement!
At C88, rewarding players generously is a principle. With the “First Deposit Get 2X Bonus” offer, players can revel in double the fun on their initial deposit. This promotion enriches the gaming experience, providing more avenues to win big across various games.
4. 20 Spin Times = Get Big Bonus (8,888P) – Spin Your Way to Greatness!
Spin your way to substantial bonuses with the “20 Spin Times” promotion. Accumulate spins and stand a chance to win an impressive bonus of 8,888P. This promotion adds an extra layer of excitement to the gameplay, combining luck and strategy for maximum enjoyment.
5. Daily Check-in = Turnover 5X?! – Daily Rewards Await!
Consistency is paramount at C88. By simply logging in daily, players not only bask in the thrill of gaming but also stand a chance to multiply their turnovers by 5X. Daily check-ins bring additional perks, making every day a rewarding experience for dedicated players.
6. 7 Day Deposit 300 = Get 1,500P – Unlock Deposit Rewards!
For those craving opportunities, the “7 Day Deposit” promotion is a game-changer. Deposit 300 and receive a generous reward of 1,500P. This promotion encourages players to explore the platform further and maximize their gaming potential.
7. Invite 100 Users = Get 10,000 PESO – Share the Excitement!
C88 believes in the strength of community. Invite friends and fellow gamers to join the excitement, and for every 100 users, receive an incredible reward of 10,000 PESO. Sharing the joy of gaming has never been more rewarding.
8. C88 New Member Get 100% First Deposit Bonus – Exclusive Benefits!
New members are in for a treat with an exclusive 100% First Deposit Bonus. C88 ensures that everyone kicks off their gaming journey with a boost, setting the stage for an exhilarating experience filled with opportunities to win.
9. All Pass Get C88 Extra Big Bonus 1000 PESO – Unlock Unlimited Rewards!
For avid players exploring every nook and cranny of C88, the “All Pass Get C88 Extra Big Bonus” offers an additional 1000 PESO. This promotion rewards those who embrace the full spectrum of games and features available on the platform.
Eager to dive into the excitement? Visit C88 now and unlock a world of gaming like never before. Don’t miss out on the excitement, bonuses, and wins that await you at C88. Join the community today and let the games begin! #c88 #c88login #c88bet #c88bonus #c88win
Software Key · December 6, 2023 at 6:01 pm
Its not my first time to go to see this site, i am browsing this site dailly and obtain nice data from here
every day.
коучинг для бизнеса · December 7, 2023 at 12:39 am
wonderful post, very informative. I wonder why the other experts of this sector do not realize this. You should continue your writing. I am sure, you have a huge readers’ base already!
Ztlclu · December 7, 2023 at 11:58 am
actigall 300mg oral order zyrtec 10mg sale cetirizine online buy
Anonymous Litecoin Wallet · December 7, 2023 at 11:02 pm
Way cool! Some extremely valid points! I appreciate you penning
this article and the rest of the site is really good.
Elmermob · December 8, 2023 at 11:18 pm
[url=https://mostbethu.net]mostbet apk[/url]
Install application online casino mostbet – win today!
mostbet apk
документы на квартиру · December 10, 2023 at 6:14 am
Hi, i think that i saw you visited my web site so i came to return the favor.I am trying to find things to improve my site!I suppose its ok to use some of your ideas!!
документы для продажи дома · December 10, 2023 at 12:22 pm
Good day! Do you know if they make any plugins to protect against hackers? I’m kinda paranoid about losing everything I’ve worked hard on. Any suggestions?
RobertQuoff · December 11, 2023 at 3:08 pm
[url=https://4kraken.com/]kraken darknet ссылка[/url] – кракен ссылка тор, кракен даркнет ссылка
zminaHar · December 11, 2023 at 3:32 pm
На сайте https://trimach.ru/ вы сможете заказать и приобрести пневмоударное оборудование, горизонтальное бурение. Также оказывается и такая полезная услуга, как сопровождение проектов. Предприятие отличается огромным стажем в вопросе ведения больших проектов, профессиональных консультаций, которые касаются правильной эксплуатации оборудования. В каталоге вы сможете изучить оборудование, которое используется для бурения: буровые коронки, пилотные долота, кольцевые коронки. Также здесь вы сможете заказать и пневмоударные молотки, поворотные головки.
Darrencully · December 11, 2023 at 4:36 pm
[url=https://mega555letmeknowtwebs.com]mega sb darknet[/url] – mega555kf7lsmb54yd6etzginolhxxi4ytdoma2rf77ngq55fhfcnyid, mega market
Opowrz · December 11, 2023 at 4:40 pm
amoxiclav online clomiphene online buy buy generic serophene
ShirleyHoada · December 11, 2023 at 5:13 pm
промокоды Aurora Casino
официальный сайт Aurora Casino
Randyclume · December 11, 2023 at 6:18 pm
[url=https://m3ga555darknet.com]mega[/url] – мега ссылка, mega не работает
shop.geizer.com · December 11, 2023 at 6:25 pm
Howdy would you mind letting me know which webhost you’re working with?
I’ve loaded your blog in 3 different browsers and I must say this blog loads a lot quicker then most.
Can you suggest a good web hosting provider at a
honest price? Thank you, I appreciate it!
BrandonSwowl · December 11, 2023 at 6:46 pm
[url=https://m3gaglkf7lsmb54yd6etzonion.com]m3ga gl[/url] – m3ga at, m3ga at
car accident lawyer · December 11, 2023 at 7:20 pm
Hello Dear, are you genuinely visiting this website on a regular basis,
if so afterward you will definitely get pleasant knowledge.
Stepahen · December 11, 2023 at 7:22 pm
Ищите достойную площадку для размещения объявлений? StokBuy имеет массу прекрасных отзывов, в них пользователи находят легкость регистрации, удобную разбивку на категории, расширенный поиск продукции. На сайте нет навязчивых рекламных окон и баннеров. Ищите купить оборудование? StokBuy.com – площадка, где есть возможность найти предложения о предоставлении различных услуг и детально изучить их. Предлагается выбор из следующих категорий: оборудование, комплектующие, сырье, дом и дача, отдых и др. С StokBuy просто продать или найти то, что нужно!
SkachatBetcityfinnagt · December 11, 2023 at 8:47 pm
Здесь можно бесплатно и безопасно [url=https://betcity-apps.ru/]скачать бетсити[/url]
Kelle · December 11, 2023 at 8:53 pm
%%
Also visit my site :: https://pinupcasino-officialsite.win/
evaganoubs · December 11, 2023 at 9:08 pm
На сайте https://farmuzon.net/ ознакомьтесь с приятными, красивыми и лирическими треками, которые подарят много приятных, положительных эмоций и впечатлений. Все композиции в отличном качестве, а потому слушать их – одно удовольствие! Есть как узбекские, так и турецкие, зарубежные, казахские песни, при помощи которых вы составите свой плейлист. Также можно ознакомиться с самыми модными песнями, которые слушает большинство, а также ожидаемыми новинками. Обязательно ознакомьтесь с топом самых популярных артистов. Они восхитят своим пением.
GloriaEnure · December 11, 2023 at 11:28 pm
real money inter slot machine
online play roulette
casino virtual juegos gratis [url=https://trusteecasinos2024.com/]online blackjack gambling website[/url] live online blackjack usa high paying online gambling website online craps casino game
topgame casinos instant play
ipovaGoord · December 11, 2023 at 11:55 pm
На сайте https://izumrudprint.ru/ вы можете заказать печать полиграфии в разных форматах. Здесь предлагается печать книг, визиток, календарей и другой полиграфической продукции. Великолепная репутация, приемлемые цены, клиентский сервис и гарантия качества – это все делает типографию в Москве популярной среди клиентов. Если вам необходима срочная цифровая печать, типография готова оказать данную услугу оперативно. Подробнее ознакомиться с услугами типографии можно на сайте.
slot gacor · December 12, 2023 at 12:57 am
That is a great tip particularly to those new to the blogosphere.
Simple but very accurate info… Appreciate your sharing this
one. A must read article!
omovvBeice · December 12, 2023 at 1:11 am
На сайте https://xn—-9sbbcprfjdkzb4b8a9azg.xn--p1ai/ вы узнаете все о лучших бойцовских клубах. Здесь размещены материалы признанных экспертов в сфере боевых искусств. В статьях приводятся рекомендации по преодолению страха перед поединком, советы тренеров по общефизической подготовке и многое другое. На портале анонсируются события из мира единоборства, которые проходят в России. Благодаря поиску на сайте, вы легко сможете выбрать расположение секции, а также вид единоборств и возрастную группу.
bovaNMal · December 12, 2023 at 1:50 am
На сайте http://law-corporation.ru предлагаются профессиональные юридические услуги по лояльным ценам. Подробнее ознакомиться с тарифами можно на сайте. Также здесь вы детально рассмотрите виды оказываемой юридической помощи. Услуги предоставляют юристы, которые имеют большой опыт в работе и аттестацию. Они каждое дело рассматривают индивидуально. Все сведения, полученные адвокатом при выполнении поручения доверителя, защищены законом и составляют адвокатскую тайну. Вы можете записаться на оказание услуги уже сейчас по телефону на сайте.
CarlosVaf · December 12, 2023 at 2:17 am
I came across a useful site that can be useful in everyday life http://allnewstroy.ru
SkachatBetcityyfinnagt · December 12, 2023 at 5:18 am
Только тут можно быстро и безопасно [url=https://betcity-apps.ru/]бетсити скачать[/url]
onexbet_doEi · December 12, 2023 at 5:29 am
Ставьте на победу вместе с onexbet и получайте высокую прибыль!
1xbet program download [url=https://www.1xbetappvgergf.com]https://www.1xbetappvgergf.com[/url].
flughafentransferzenchs · December 12, 2023 at 7:52 am
[url=https://flughafentransferzenchs.com/de/directions/macedonia]flughafentransferzenchs.com/de/directions/macedonia[/url]
We’ll join you at the airport. We’ll transport you to your pension or another city. We commitment aid with your luggage. Including minibuses.
flughafentransferzenchs.com/de/directions/tunisia
alinasOxymn · December 12, 2023 at 9:12 am
На сайте https://jozibali.uz/ вы найдете красивые, нежные, волнительные песни, которые сделают настроение более позитивным и ярким. А если вы желаете отыскать какую-либо определенную песню, то воспользуйтесь комфортным поиском. Вбейте название, после чего система сама подберет вариант. На сайте имеются как русские, узбекские, турецкие, зарубежные треки, которые никого не оставят без внимания. Имеются самые свежие новинки, выхода которых ожидали все меломаны. Представлен топ треков за день. Их слушают особенно активно.
Seks.Kazakh.ru · December 12, 2023 at 9:18 am
I was wondering if you ever thought of changing the layout of your website?
Its very well written; I love what youve got to say.
But maybe you could a little more in the way of content so people could
connect with it better. Youve got an awful lot of text for only having 1 or 2 images.
Maybe you could space it out better?
NikkiBeachAldarfinnagt · December 12, 2023 at 9:58 am
Branded Residences from the Masters [url=https://nikki-beach-aldar.com/]Nikki Beach Aldar[/url]
Pin_udPt · December 12, 2023 at 11:37 am
Пин ап
пин ап [url=http://www.pinupcasinojdhenecko.vn.ua/]http://www.pinupcasinojdhenecko.vn.ua/[/url].
Francesca · December 12, 2023 at 12:38 pm
Amazing all kinds of great material!
NikkiBeachRasfinnagt · December 12, 2023 at 4:19 pm
Best Branded Residences from the Masters [url=https://nikki-beach-aldar.com/]Nikki Beach Ras Al Khaimah[/url]
Ponaflexusa.Com · December 12, 2023 at 4:46 pm
I am curious to find out what blog platform you happen to be utilizing?
I’m experiencing some minor security issues with
my latest site and I would like to find something more
secure. Do you have any solutions?
http://orel.ruspet.ru/bitrix/redirect.php?goto=https://worldcosplay.net/member/1289821 · December 12, 2023 at 5:38 pm
Thanks for sharing your thoughts on Link Gbo4d.
Regards
asubbsteli · December 12, 2023 at 5:51 pm
На сайте https://play.google.com/store/apps/details?id=com.pa.aurum вы сможете скачать приложение, которое превратит ваш телефон в инструмент достатка. Вам лишь нужно будет устанавливать приложения и отзывы о них. Удобный интерфейс, неплохой заработок, легкая регистрация и отличная техническая поддержка, делает данное приложение популярным. Выберите интересное для себя задание и получите доступ к уникальным приложениям. Не упустите свой шанс заработать приличные деньги!
alenaacash · December 12, 2023 at 6:33 pm
МСК фурнитура предлагает фурнитуру и запчасти для мебельного производства, торгового оборудования и другое по доступным ценам. У нас только качественный и сертифицированный товар. Действует система скидок в зависимости от суммы заказа. Ищите колесо неповоротное? MSK-furnitura.ru – сайт, где можно детальнее посмотреть каталог категории товаров и подобрать нужное для себя. Если остались какие-либо вопросы, позвоните по телефону, указанному на сайте и менеджеры компании с удовольствием проконсультируют вас и помогут в выборе интересующего товара.
flughafentransferzenchs · December 12, 2023 at 6:46 pm
[url=https://flughafentransferzenchs.com/de/directions/luxembourg]flughafentransferzenchs.com/de/directions/luxembourg[/url]
We’ll meet you at the airport. We’ll transport you to your hotel or another city. We commitment serve with your luggage. Including minibuses.
flughafentransferzenchs.com/de/directions/san-marino
trofimRic · December 12, 2023 at 7:33 pm
На сайте https://zamara.ru/ предложен вашему вниманию каталог магазинов для покупки мебели. Здесь вы узнаете, какие критерии для выбора мебели существуют, подробнее ознакомитесь с отзывами о мебельных магазинах, а также прочтете информацию, как правильно проконсультироваться с профессионалами. Благодаря данной актуальной информации на портале, можно выбрать подходящий вариант для покупки товаров для дома. Также здесь вы найдете компании в административных центрах субъектов РФ.
flughafentransferzenchs · December 12, 2023 at 9:06 pm
[url=https://flughafentransferzenchs.com/de/directions/bahamas]flughafentransferzenchs.com/de/directions/bahamas[/url]
We’ll be introduced to you at the airport. We’ll take you to your pension or another city. We commitment serve with your luggage. Including minibuses.
flughafentransferzenchs.com/de/directions/turkmenistan
onexbet_mvEi · December 12, 2023 at 10:11 pm
Заработайте на своих знаниях в спорте с onexbet – нашим уникальным сервисом ставок!
Download ixbet program [url=http://1xbetappvgergf.com/]http://1xbetappvgergf.com/[/url].
onexbet_cjEi · December 12, 2023 at 11:20 pm
Станьте мастером ставок в onexbet уже сегодня!
Download Wann Xbet [url=http://www.1xbetappvgergf.com]http://www.1xbetappvgergf.com[/url].
NikkiBeachResfinnagt · December 13, 2023 at 12:03 am
I recommend this [url=https://nikki-beach-aldar.com/]Nikki beach residences RAK[/url]
vavikchard · December 13, 2023 at 12:08 am
На сайте https://izhlogoped.ru запишитесь на занятие к квалифицированному, опытному и знающему логопеду, который проработает с вашим ребенком все особенности речи. Он научит правильно разговаривать, произносить звуки, устранит дефекты, выполнит подготовку к школе, разовьет речь. В работе используются только инновационные и проверенные методики, которые действительно приносят результат. К каждому ребенку используется индивидуальный подход. Именно этот момент позволяет быстрее освоить программу.
CapeHayatHek · December 13, 2023 at 1:34 am
I recommend this [url=https://cape-hayat-rak.com/]Cape Hayat[/url]
rastesnock · December 13, 2023 at 1:54 am
На сайте https://www.imperiasinteza.by запишитесь онлайн или по телефону на такие услуги, как: массаж, логопедия, сенсорная интеграция. Массаж выполняется по уникальным технологиям и по инновационным методикам. К каждому клиенту практикуется индивидуальный подход, а потому вы получите тот результат, на который рассчитывали. В центре работает компетентный и квалифицированный персонал, который трудится на результат. Также доступен выезд массажиста на дом. Все услуги, программы направлены на то, чтобы улучшить эмоциональное, физическое состояние.
ChrisJom · December 13, 2023 at 2:31 am
ритуальные услуги кремация https://ritual-gratek16.ru/
paperhelp review · December 13, 2023 at 2:56 am
This page certainly has all of the information I wanted concerning this subject and didn’t know who to ask.
Dwquwa · December 13, 2023 at 4:08 am
generic combivent 100 mcg buy decadron pills order linezolid 600 mg generic
Alexandersteld · December 13, 2023 at 4:09 am
referencia
WilliamFug · December 13, 2023 at 4:25 am
антон винер жена
slavopluby · December 13, 2023 at 8:08 am
На сайте https://minivan.online вы можете заказать услуги такси по выгодным тарифам. Все автомобили с откатными дверями с обеих сторон и с большими креслами для пассажиров. Работают без посредников, что позволяет устанавливать стоимость на услуги ниже конкурентов. Такси Минивэн предлагает такие услуги: детское такси, минивэн на свадьбу, такси минивэн в аэропорт, корпоративный транспорт, минивэн межгород, большое такси. Комфорт, многолетний опыт и безопасность – вот главные преимущества Минивэн онлайн. Сделать заказ вы можете уже сейчас.
hestaQuary · December 13, 2023 at 8:08 am
На сайте https://cdmebel.ru/ вы сможете оформить заявку на создание первоклассной, качественной и надежной офисной мебели, которая станет украшением интерьера и функциональным элементом. Можно заказать предметы для персонала, руководителя, ресепшен, стулья и кресла, кухни для офиса и многое другое. Компания выпускает несколько коллекций, которые регулярно обновляются, чтобы вы получили эргономичное, красивое помещение и подобрали вариант в соответствии с предпочтениями. Ознакомьтесь с каталогом и расценками прямо сейчас.
Pin_cxPt · December 13, 2023 at 9:27 am
Наслаждайся яркими и захватывающими играми в казино Пин ап!
сайт пин ап [url=https://pinupcasinojdhenecko.vn.ua/]https://pinupcasinojdhenecko.vn.ua/[/url].
Insurance agent Santa Ana · December 13, 2023 at 9:32 am
The depth of understanding provided listed below is
remarkable. I aspire to learn more articles coming from you.
Feel free to visit my site: Insurance agent Santa Ana
ovaalidori · December 13, 2023 at 10:10 am
На сайте https://m-strop.by/ предлагается продажа грузозахватных приспособлений по доступным ценам. Клиентам предоставляются оборудование собственного производства и новейшие грузоподъемные механизмы. Большой ассортимент товаров позволяет удовлетворить запросы даже самых требовательных покупателей. Компания открыта для взаимовыгодного сотрудничества. Для оптовых покупателей имеются хорошие скидки. Подробнее ознакомиться с каталогом продукции есть возможность на сайте.
http://helle.dk/freelinks/hitting.Asp?id=1992&url=https://arrozzaq.sch.id/ · December 13, 2023 at 11:27 am
Good day I am so glad I found your blog, I really found you by mistake, while
I was looking on Aol for something else, Nonetheless I am here now and would just like to
say thank you for a incredible post and a all round exciting blog (I also love the theme/design), I dont have time to look over it all at the minute but I have saved it and also added in your RSS feeds, so when I have time I will be back to read
much more, Please do keep up the superb work.
MercerHousefinnagt · December 13, 2023 at 11:47 am
I recommend this best [url=https://mercer-house.ae/]Mercer House[/url]
sistemy_mvki · December 13, 2023 at 12:04 pm
Защитите свой дом от непредвиденных ситуаций с системой протечек воды
датчик потопа в квартире [url=http://www.neptun-bugatti.ru]http://www.neptun-bugatti.ru[/url].
Floydmyday · December 13, 2023 at 12:54 pm
Look At This
[url=https://heremyblog.com/103/uniteds-champions-league-struggle-manager-stays-hopeful/]United’s Champions League Hurdle: Ten Hag’s Optimism Amidst Defeats[/url]
evaVaCoemo · December 13, 2023 at 1:28 pm
Желаете скачать бесплатно музыку в лучшем качестве? Хотплеер дает вам такую возможность, регистрации здесь не требует и имеет прекрасный дизайн. Здесь нет лишних элементов, которые могут вас отвлекать. Предлагается большой каталог музыки. Перед загрузкой все можете послушать онлайн прямо на сайте. Ищите mp3 скачать бесплатно 2022? Hotplayer.ru – это находка для меломанов, данный ресурс вам точно придется по вкусу. Сервис удобный, на главной странице размещены трендовые композиции, слушайте их с удовольствием и скачивайте. Не расставайтесь с любимой музыкой!
http://Www.Jucaiba.com/Link/show.aspx?u=https://Www.mobafire.com/profile/gbowinnolimitcity-1132658?profilepage · December 13, 2023 at 2:22 pm
I’ve been browsing online more than 4 hours today, yet I never found any interesting article like
yours. It is pretty worth enough for me. Personally, if all web
owners and bloggers made good content as you did, the internet will be much more useful than ever before.
ChuckJoync · December 13, 2023 at 3:14 pm
[url=https://wiki-tor.info]даркнет площадка мега[/url] – мега площадка даркнет, mega ссылка даркнет
MercerhouseDubfinnagt · December 13, 2023 at 3:29 pm
I recommend this original site [url=https://mercer-house.ae/]Mercer House Dubai[/url]
Dallas insurance · December 13, 2023 at 3:54 pm
Your blog post challenged several of my presumptions.
Thank you for giving a new perspective.
Feel free to surf to my web blog … Dallas insurance
DavidJef · December 13, 2023 at 5:08 pm
[url=https://wiki-tor.info]Mega darknet ссылка[/url] – кракен оригинальная ссылка, kraken ссылка
nalukiWaymn · December 13, 2023 at 5:13 pm
На сайте https://zamok-ok.ru/vskrytie-zamkov/ найдите номер телефона для того, чтобы позвонить в компанию для вызова мастера по вскрытию дверных замков. Все специалисты отличаются огромным стажем, работали с замками различного типа и модификации. Именно поэтому легко справятся с проблемой независимо от ее сложности. В компании действуют только честные расценки, а замок вскрывается без ущерба для него. Вызывайте мастера в любое время, потому как компания работает круглосуточно. Услуги оказываются по привлекательным ценам.
bachezeD · December 13, 2023 at 5:36 pm
На сайте https://umnyy-dom-77.ru/ можно купить систему умный дом. Компания предлагает инновационные решения для современных квартир и домов. На портале вы подробно узнаете, как оснастить квартиру умным домом. Здесь предлагаются надежные условия доставки. Вы можете сэкономить свои деньги и время, выбрав опцию самовывоза из магазина. Цель компании – сделать дом клиентов эффективным, удобным и интеллектуальным. По всем вопросам, вы можете обратиться к грамотным консультантам, которые всегда помогут с выбором и ответят на все интересующие вопросы.
lavlogTug · December 13, 2023 at 6:08 pm
На сайте https://pasador.ru/ закажите инженерные системы, трубопроводную арматуру. В каталоге представлены баки расширительные, балансировочный клапан, запорные вентили, автоматические воздухоотводчики, задвижки клиновые. Для того чтобы подыскать то оборудование, которое необходимо, воспользуйтесь специальным фильтром, находящимся слева. На портале регулярно публикуют различные информативные, содержательные и актуальные новости. Они будут полезны всем, кто в данной теме. Все устройства наделены долгим сроком эксплуатации.
vorovboony · December 13, 2023 at 8:19 pm
На сайте https://play.google.com/store/apps/details?id=com.pa.aurum можно скачать приложение для заработка денег. Вам просто необходимо выбирать задания по вашим интересам и возможностям. Данное приложение дает возможность легко и быстро управлять своими финансами, контролировать доходы и планировать бюджет на будущее. В приложении есть множество заданий разных категорий. Выбирайте и зарабатывайте уже сейчас. Также здесь можно приглашать друзей и увеличивать свой доход.
MercerHouseellingtonfinnagt · December 13, 2023 at 8:21 pm
I recommend to all this original [url=https://mercer-house.ae/]Mercer House Ellington[/url]
тренинг внедрение изменений · December 13, 2023 at 8:26 pm
naturally like your website however you need to test the spelling on quite a few of your posts. A number of them are rife with spelling problems and I find it very bothersome to tell the truth then again I will surely come back again.
Ladonna · December 13, 2023 at 8:57 pm
Nicely put. Thanks.
Also visit my blog post: https://Geraldosouzamagazine.Com.br/index.php?page=user&action=pub_profile&id=23573
CapeHayatrakHek · December 13, 2023 at 9:53 pm
I recommend to all this [url=https://cape-hayat-rak.com/]Cape Hayat RAK[/url]
patong harbor view 2 bed apartment rentals · December 13, 2023 at 10:56 pm
What a stuff of un-ambiguity and preserveness of valuable familiarity concerning unexpected emotions.
Pryschi_nmen · December 13, 2023 at 11:08 pm
Акне у подростков: причины и лечение
Выдавливание старых прыщей [url=pryshchi.ru#Выдавливание-старых-прыщей]pryshchi.ru[/url].
Rafaelveich · December 14, 2023 at 12:12 am
https://poisk-proslushki-spb.ru/
Securityservicesfinnagt · December 14, 2023 at 12:28 am
I recommend this best [url=https://fsoguard.us/]security services[/url] in Miami.
Robertopoeva · December 14, 2023 at 12:36 am
https://poisk-proslushki-msk.ru/
MichaelKep · December 14, 2023 at 2:05 am
[url=https://t.me/ozempicg]оземпик +в наличии купить[/url] – тирзепатид таблетки, оземпик купить 0
Lee · December 14, 2023 at 3:59 am
Cheers, Useful information.
MichaelRef · December 14, 2023 at 4:28 am
[url=https://t.me/ozempic_zakazat]какие препараты +для похудения[/url] – Оземпик 1 мг купить, оземпик препарат инструкция цена
cheap airlines · December 14, 2023 at 4:56 am
Have you ever thought about writing an e-book or guest authoring on other websites?
I have a blog centered on the same topics you discuss and would really like to have you
share some stories/information. I know my visitors would appreciate your
work. If you’re even remotely interested, feel free to send me
an e mail.
afiliCanny · December 14, 2023 at 6:24 am
На сайте https://nochniki77.ru/ приобретите роскошные, интересные ночники по привлекательной стоимости. Все они наделены оригинальным, лаконичным дизайном, а потому отлично впишутся в концепцию помещения. Имеются как небольшие, так и более крупные варианты. Предприятие специализируется на реализации самых разных ночников, чтобы в вашем доме всегда было уютно и красиво. Миссия компании – создать приятное пространство. Каждый товар тщательно отбирается, чтобы предложить вам продукцию ведущих поставщиков.
ilnikoenrob · December 14, 2023 at 6:28 am
На сайте https://akkumulyatory-avto-77.ru/ вы сможете приобрести качественные, функциональные и оригинальные аккумуляторы как от популярных отечественных, так и зарубежных марок. Они создают продукцию в соответствии с ГОСТом, заданными технологиями. Все устройства прослужат долгое время. Из огромного ассортимента вы обязательно подберете вариант для себя. Есть возможность забрать аккумулятор самостоятельно либо воспользоваться комфортной и быстрой доставкой. На все аккумуляторы действуют гарантии.
HaroldSoift · December 14, 2023 at 7:48 am
[url=https://t.me/ozempik_kupit_bezpredoplat]семаглутид аптека[/url] – оземпик 3 мл купить москва +в наличии, доставка оземпика +в россию
https://Blog.fc2.com · December 14, 2023 at 7:51 am
I loved as much as you’ll receive carried out right here.
The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get got an edginess over that you
wish be delivering the following. unwell
unquestionably come further formerly again as exactly the same nearly
very often inside case you shield this increase.
Judson · December 14, 2023 at 8:24 am
%%
Also visit my web page https://www.hackster.io/elec244/discussion/general
Sheila · December 14, 2023 at 9:43 am
%%
My blog … https://malimar.ru/pages/seo_prodvizhineje_sajta_kak_sdelat_jego_zametnym.html
SR22 Insurance Chicago · December 14, 2023 at 9:46 am
The research you’ve taken into this post appears. This is some of
the best complete protection on the subject I have
actually encountered.
My blog post – SR22 Insurance Chicago
https://Www.Blowjobhdpics.com/ · December 14, 2023 at 10:25 am
Hi there! I know this is somewhat off topic but I was wondering if you knew where I could locate a captcha plugin for my
comment form? I’m using the same blog platform as yours and I’m having
trouble finding one? Thanks a lot!
Mobilepatrollingfinnagt · December 14, 2023 at 10:28 am
I recommend this best [url=https://fsoguard.us/]mobile patrolling[/url] in Miami.
CapeHayatrakpHek · December 14, 2023 at 11:47 am
I recommend to all this best [url=https://cape-hayat-rak.com/]Cape Hayat RAK Properties[/url]
Belinda · December 14, 2023 at 12:50 pm
You suggested this fantastically!
trilinnex · December 14, 2023 at 2:12 pm
На сайте https://www.parvenik.ru/ есть возможность приобрести банные веники и травы для бани по приемлемым ценам. Все веники для бани собраны вовремя и правильно связанные, сделаны из экологически чистых районов. Продаются оптом и в розницу. С категорией товаров и стоимостью доставки ознакомьтесь на портале. Также здесь есть товары со скидкой, вы можете посмотреть их уже сейчас. Стоимость веников меняется в меньшую сторону, в зависимости от количества выбранного товара.
Securityguardfinnagt · December 14, 2023 at 3:09 pm
I recommend this best [url=https://fsoguard.us/]security guard[/url] site in Miami.
Derekbub · December 14, 2023 at 4:00 pm
19dewa login
ydovaTIb · December 14, 2023 at 4:55 pm
На сайте https://akkumulyatory-avto-77.ru/ есть возможность купить аккумуляторные батареи по привлекательной стоимости. Компания специализируется на продаже качественных аккумуляторов для любых типов авто. Предлагается оперативная доставка. Курьеры доставят товар по адресу и, если нужно, помогут с его установкой. Подробную информацию о видах аккумуляторов для автомобилей можно увидеть на сайте. Также здесь предложена бонусная программа. По всем вопросам обращайтесь к опытным консультантам, которые помогут с выбором и ответят на вопросы.
mobile frequency jammer · December 14, 2023 at 6:39 pm
Your mode of describing the whole thing in this paragraph is genuinely nice,
all be capable of without difficulty understand it, Thanks a lot.
My blog post – mobile frequency jammer
coes · December 14, 2023 at 7:01 pm
It’s really very difficult in this full of activity life to listen news on Television, therefore I just use web for
that purpose, and get the most recent news.
voronweedy · December 14, 2023 at 7:36 pm
На сайте https://www.donna-prof.com/ узнайте контактные данные рекрутинговой компании «Донна», которая на профессиональном уровне занимается подбором персонала для офиса и дома, в соответствии с предпочтениями, требованиями заказчика. Все сотрудники отличаются огромным опытом, желанием развиваться, а потому выполняют работу на высшем уровне. Перед подбором специалиста в обязательном порядке изучается специфика деятельности заказчика. Так он получает именно то, на что рассчитывал. Услуга оказывается по хорошей цене.
valiliWaymn · December 14, 2023 at 8:35 pm
На сайте https://izhlogoped.ru вы можете записаться на занятие к логопеду и нейропсихологу для ребенка. Специалисты используют самые новейшие методики, приносящие стабильные результаты. К каждому ребенку находят персональный подход и подбирают уникальную программу занятий. Они подготовили все необходимое для эффективных и комфортных занятий. Подробнее ознакомиться со специалистами, а также стоимостью занятий, вы можете на сайте. Записывайтесь на занятия уже сейчас!
Where can I enter my 8-digit Disney Plus code? · December 14, 2023 at 8:38 pm
I really like what you guys are usually up too.
This type of clever work and reporting! Keep up the terrific works guys I’ve included you
guys to my personal blogroll.
Kosmetolog_qcel · December 14, 2023 at 9:57 pm
Секреты молодости и красоты в косметологии антиэйджинга
косметология процедура [url=http://www.epilstudio.ru/#косметология-процедура]http://www.epilstudio.ru/[/url].
Studybay · December 14, 2023 at 10:15 pm
Howdy are using WordPress for your site platform?
I’m new to the blog world but I’m trying to get started and create my
own. Do you require any html coding knowledge to
make your own blog? Any help would be greatly appreciated!
Shawncap · December 14, 2023 at 11:24 pm
кредитная карта мтс кэшбэк https://займы-все.рф/creditniekarti/dengi-zero-0-godovyh/
BeverlyNeery · December 14, 2023 at 11:36 pm
казино без верификации
https://clickrabota.ru
BeverlyNeery · December 14, 2023 at 11:50 pm
лучшие онлайн казино без верификации
казино без верификации документо
ExoticCarRentalfinnagt · December 15, 2023 at 12:03 am
I recommend only this [url=https://pugachev.miami/]exotic car rental Miami[/url] site.
Lettie · December 15, 2023 at 12:04 am
Truly a lot of very good info!
JeromeStula · December 15, 2023 at 1:06 am
Opened up an intriguing read – let me share this with you http://wmmoney.tforums.org/viewtopic.php?f=79&t=23880
Jessesteld · December 15, 2023 at 2:21 am
buy aldactone 100 mg
BillySup · December 15, 2023 at 2:47 am
[url=https://mounjaro.top]семаглутид купить +в челябинске[/url] – трулисити цена отзывы аналоги, препарат оземпик +для похудения цена +и отзывы
Thomasvig · December 15, 2023 at 2:55 am
[url=https://ozempic.market]тирзепатид найти +в москве +с доставкой[/url] – семаглутид инструкция цена, уколы оземпик
Yzanjt · December 15, 2023 at 3:56 am
levitra oral plaquenil 400mg us buy plaquenil without prescription
oglecoTwilm · December 15, 2023 at 5:48 am
На сайте https://mcn-group.eu/ предложены вашему вниманию консультация и юридические услуги в Испании. Компания обеспечивает максимальную защиту деловой, личной и финансовой информации. Здесь выстраиваются долгие партнерские отношения, и формируется стратегия на будущее. Вы можете уже сейчас получить консультацию, по таким вопросам, как: приобретение недвижимости, оформление ВНЖ, сопровождение инвестиционной и предпринимательской деятельности. Чтобы назначить встречу, заполните форму на сайте.
Ron Spinabella · December 15, 2023 at 6:04 am
Incredible! This blog looks exactly like my old one!
It’s on a totally different topic but it has pretty much the same page
layout and design. Great choice of colors!
My web page – Ron Spinabella
Damongreta · December 15, 2023 at 6:10 am
[url=https://ozempik.com.ru]оземпик препарат инструкция[/url] – семаглутид применение цена, саксенда раствор +для инъекций
sazykbrofs · December 15, 2023 at 6:19 am
На сайте https://www.off-road-diskont.ru/ вы сможете узнать адрес компании, которая продает запчасти для тюнинга внедорожников. Все комплектующие от именитых и проверенных марок, которые создают оригинальную, качественную продукцию с длительными эксплуатационными сроками. Многие автозапчасти реализуются с хорошей скидкой, что позволит существенно сэкономить. В каталоге запчастей имеются комплектующие как для зарубежных, так и отечественных автомобилей. Вся продукция реализуется по хорошей, привлекательной стоимости.
vavalExodA · December 15, 2023 at 6:21 am
На сайте https://rieltorspb.ru предлагаются квалифицированные услуги риелтора по приемлемым ценам. Специалист оказывает весь комплекс услуг по покупке и продаже квартир и комнат. Личный риелтор обсуждает все вопросы по телефону и договаривается о встрече с клиентом. Далее заключает договор, оплата производится после закрытия сделки. На сайте вы можете подробнее ознакомиться с объектами, новостями и статьями. Заказать звонок, возможно, по телефону, указанному на портале.
Julieta · December 15, 2023 at 6:42 am
Kudos! Excellent stuff!
Koshesab · December 15, 2023 at 8:43 am
На сайте https://cifrovoetv.ru/ вы можете заказать услугу установки и ремонта Триколор ТВ. Для этого позвоните по телефону на сайте либо оставьте заявку. Необходимый ремонт Триколор будет осуществлен в сжатые сроки. Также клиентам предлагается участие в акции Триколор Обмен, вы можете обменять свой старый ресивер на новый. У грамотных мастеров всегда в наличии расходные и запасные материалы, которые они применяют при ремонте. На все услуги и оборудование предлагается гарантия.
angkor wat tickets · December 15, 2023 at 8:47 am
You will need to buy an Angkor pass or Angkor wat ticket
to enter the Angkor archeological park, even if you do not
plan to visit any temples (for example just riding your mountain bike).
stageit.com
GeraldViola · December 15, 2023 at 9:04 am
Казино Вавада – пионер в мире азартных развлечений. [url=https://vavada-kazino.info/ru/]vavada0nline[/url]- место для качественных игр и бонусов . Наслаждайтесь рулеткой и премиями на казино Vavada!
Tory · December 15, 2023 at 10:29 am
A full-service shifting firm, Safeway can pack and load your stock on your transferring day and unload and unpack upon supply.
Feel free to surf to my web blog http://westchestercremationcare.org/__media__/js/netsoltrademark.php?d=sitesrow.com%2Fstory5764766%2Fafinal-quanto-custa-fazer-uma-mudan%25C3%25A7a-e-como-se-planejar
무료 또는 실제 현금으로 바카라 · December 15, 2023 at 11:02 am
I like what you guys are up too. Such clever work and exposure!
Keep up the awesome works guys I’ve included you guys to our blogroll.
Cxxgam · December 15, 2023 at 12:08 pm
buy nateglinide 120mg sale atacand 8mg drug atacand usa
Roberttolve · December 15, 2023 at 12:41 pm
[url=https://ozempik.com.ru]лекарство ozempic[/url] – оземпик продажа, tirzepatide
miamiluxurycarfinnagt · December 15, 2023 at 2:30 pm
I recommend in [url=https://pugachev.miami/]miami luxury car rental[/url] site.
xxx-thai4k.com · December 15, 2023 at 5:21 pm
iⅾ=”firstHeading” class=”firstHeading mw-first-heading”>Search results
Helρ
English
Tools
Tools
mօѵe to sidebar hide
Actions
Ꮐeneral
Mʏ site … เว็บรวมคลิปโป๊ (xxx-thai4k.com)
Auroraseivy · December 15, 2023 at 5:24 pm
freespin nasıl kullanılır
https://lindenhillsfarmersmarket.com
Auroraseivy · December 15, 2023 at 5:39 pm
Free Spin Bonusu Nasıl Kullanılır
https://lindenhillsfarmersmarket.com
รวมหนังโป๊ยอดฮิต · December 15, 2023 at 6:10 pm
id=”firstHeading” class=”firstHeading mw-first-heading”>Search results
Help
English
Tools
Tools
m᧐ve to sidsbar hide
Actions
Gеneral
Feel free tօ visit my website; รวมหนังโป๊ยอดฮิต
hellobanana · December 15, 2023 at 6:37 pm
Very nice article, just what I wanted to find.
onovamew · December 15, 2023 at 6:42 pm
На сайте https://liketravelclub.ru/ можно забронировать отель и пакетный тур онлайн, не выходя из дома. Здесь вы найдете много вариантов размещения, от экономных гостиниц до роскошных курортов. Вы сможете выбрать тот вариант, который вам подходит под ваши желания и бюджет. Команда работает исключительно с надежными отелями и туроператорами. Они помогут вам организовать необыкновенный отпуск и ответят на все ваши вопросы. Поиск и бронирование доступно круглосуточно.
ergeiTal · December 15, 2023 at 8:14 pm
На сайте https://umnyy-dom-77.ru/ вы сможете приобрести все, что необходимо для системы умного дома. В разделе вы найдете: выключатель дистанционного управления, радиоуправляемую розетку, умную розетку и многое другое, что сделает ваше жилище более функциональным, надежным. Теперь вы сможете получить умное освещение, отопление, кондиционирование. Ваша квартира будет находиться в безопасности. Вас ожидают и умные кухонные устройства, мультимедийная система. Оборудование будет работать автономно, а управлять можно с мобильного устройства.
кредит на карту без отказа онлайн · December 15, 2023 at 8:15 pm
Наш сайт предоставляет уникальную возможность получения микрозаймов для лиц старше 18 лет. Мы уделяем особое внимание условиям предоставления займов, включая мгновенное одобрение и круглосуточную доступность услуг. Наши предложения охватывают займы без необходимости подтверждения дохода, что делает их доступными для широкого круга заемщиков. Кроме того, наш сайт содержит обширную информацию о микрокредитах, включая сравнительный анализ различных МФО.
Mikro-Zaim-Online – [url=https://mikro-zaim-online.ru/]займ на месяц на карту[/url] ваши финансы, ваш выбор: более 50 мфо на одной платформе.
olubepreaf · December 15, 2023 at 8:18 pm
Download the dafabet app from the official website https://dafabet-app-bet.xyz/ to make bets from any device. The app also has bonus and cashback options, so you can be sure to get the most out of your gaming experience.
leadsfah · December 15, 2023 at 8:19 pm
На сайте https://interdetal.com/ вы сможете ознакомиться с информацией, которая посвящена охранной сигнализации, видеонаблюдению, пожарной сигнализации. Здесь имеются интересные, любопытные статьи, которые помогут быстро сориентироваться в покупке, выбрать те модели, которые действительно подойдут именно вам. Вы узнаете, нужно ли видеонаблюдение в офис, так ли необходимо прогревать автомобиль летом. Имеются заметки об источниках бесперебойного питания для дома. Опубликована вся необходимая и полезная информация, которая ответит на многие вопросы.
Kristal · December 15, 2023 at 8:59 pm
%%
Here is my website: http://www.starryjeju.com/qna/3026212
JeromyWhism · December 15, 2023 at 10:09 pm
электровелосипед купить в беларуси
RobertTip · December 15, 2023 at 10:33 pm
[url=https://ozempic.market]Оземпик 0.5 мг купить[/url] – шприц ручка саксенда, Оземпик 0.25 мг купить
Georgeatoxy · December 15, 2023 at 10:56 pm
[url=https://t.me/ozempik_kupit_bezpredoplat]семаглутид какие препараты[/url] – оземпик саратов, ozempic инструкция +по применению
Charlesgab · December 15, 2023 at 11:05 pm
[url=https://mounjaro.top]трулисити 1.5 мг отзывы[/url] – оземпик тюмень, тирзепатид таблетки
Desiree · December 15, 2023 at 11:27 pm
%%
Feel free to visit my web-site http://beadbanter.com/cgi-bin/gforum/gforum.cgi?post=8438
aannGitle · December 15, 2023 at 11:44 pm
На сайте https://reklama-pro24.ru/ у вас есть возможность позвонить, и заказать квалифицированную настройку Яндекс Директ по доступным ценам. Частный директолог создаст рекламу, которая принесет большой поток клиентов, пока вы занимаетесь своими делами. Пройдите тест из вопросов на сайте, и узнайте стоимость услуги за 2 минуты по настройке рекламной компании. Также здесь есть возможность узнать, как получить реальные заявки вместо пустого трафика. Частный директолог экономит ваши нервы и время, вам только остается продавать.
ovaniBeaks · December 16, 2023 at 12:08 am
Аренда спецтехники в Новосибирске https://1sbm.ru/ это выгодные цены и огромный каталог спецтехники для производства любых строительных работ. Собственный автопарк, работа в круглосуточном режиме, аренда с экипажем, профессиональные машинисты, бесплатные консультации. Мы надежный партнер!
เว็บโป๊ · December 16, 2023 at 2:05 am
id=”firstHeading” class=”firstHeading mw-first-heading”>Seaarch гesults
Help
English
Tools
Tools
m᧐ve to sidebar hide
Actions
Generаl
ᒪook at my site; เว็บโป๊
vaverTycle · December 16, 2023 at 2:59 am
На сайте https://cheatsbase.ru/ находятся читы к играм. С той целью, чтобы найти подходящий вариант, необходимо ввести первую букву, но в качестве альтернативы подходит и поиск. При условии, что располагаете новыми читами, необходимо связаться с администрацией, чтобы вы получили выгодное предложение. А теперь ознакомьтесь с самыми свежими поступлениями, чтобы получить читы. Изучите те варианты, которые скачивают чаще остальных. Под чит кодами понимают такую комбинацию чисел, которая дарит способности в игре для того, чтобы перейти на новый уровень.
RichardJem · December 16, 2023 at 3:26 am
быстроденьги на карту https://займы-все.рф/zaimy/bystrodengi-ru/
Wilmer · December 16, 2023 at 3:53 am
%%
Also visit my website; https://www.golocal247.com/b/rockford-il/hotels
lavzaiunlaf · December 16, 2023 at 4:20 am
The leading mobile casino in its industry is https://dafabet-app-bet.ru/ on the official website. The Dafabet app is also compatible with many other platforms such as iOS and Android. Dafabet is the easiest way to place bets, deposit and withdraw money in no time!
Marvinjig · December 16, 2023 at 4:24 am
[url=https://t.me/ozempic_zakazat]мунжаро +как колоть[/url] – оземпик таблетки, оземпик препарат отзывы +для похудения
Elijahsteld · December 16, 2023 at 5:53 am
hydroxyzine cost
btrhbfeojofxcpxuwnsp5h7h22htohw4btqegnxatocbkgdlfiawhyid.onion · December 16, 2023 at 6:14 am
hello!,I love your writing very so much! share we keep up a
correspondence extra about your article on AOL? I require an expert in this
space to solve my problem. May be that’s you! Taking a look
ahead to look you.
Clementovark · December 16, 2023 at 6:50 am
[url=https://mostbet-casino-sa.com]mostbet casino[/url]
Download apk file BC mostbet – win now!
mostbet
Porn 365 · December 16, 2023 at 7:52 am
Porn 365
aginaDic · December 16, 2023 at 8:14 am
На сайте https://www.imagemirror.ru/ изучите полезную, актуальную информацию, которая касается имиджа человека, компании, предприятия. Имеется контент о том, как его правильно сформировать, какие факторы влияют на него. Имеется и другая интересная информация, которая поможет вам в дальнейшем. Этот сайт идеально подходит для тех, кто стремится изменить свою жизнь к лучшему, притворить любые свои идеи и фантазии. Есть информация и про имидж товаров, услуг. Ознакомьтесь с тем, что представляет собой имидж семьи.
agoluMup · December 16, 2023 at 8:27 am
На сайте https://thai-shop.store приобретите продукцию из Таиланда, созданную для красоты, здоровья. Имеются качественные средства для восстановления ногтей, волос, кожи. Также можно приобрести БАДы при повышенном давлении, для регуляции веса, для нормализации мочеполовой сферы. Все средства являются сертифицированными, качественными, абсолютно безопасными в применении. Они принесут только пользу. Обойдутся по доступной стоимости, а потому можно заказать сразу все, что нужно. Специально для вас оперативная доставка.
ekatesek · December 16, 2023 at 10:54 am
Download the dafabet app, register and start playing on the official website https://dafabetappbet.xyz/ for online sports betting. The registration process is simple and allows you to make deposits and withdrawals easily. Get bonuses for registration.
ovaMahok · December 16, 2023 at 11:25 am
На сайте http://smartporog.ru можно приобрести автоматические врезные пороги для разных типов дверей по приемлемым ценам. Здесь есть возможность посмотреть каталог и выбрать необходимый порог самостоятельно. Умный порог устраняет преграду в полу, избавляет от сквозняков и холода, также улучшает звукоизоляцию. Закажите качественный smartпорог у нас уже сейчас по ценам ниже, чем у других. Не знаете, какой порог выбрать? Заполните контактную форму на сайте, сотрудники вам перезвонят и грамотно проконсультируют.
sra survivors · December 16, 2023 at 11:32 am
Today, I went to the beachfront with my kids.
I found a sea shell and gave it to my 4 year old daughter and
said “You can hear the ocean if you put this to your ear.” She put the shell to her ear
and screamed. There was a hermit crab inside and it pinched her ear.
She never wants to go back! LoL I know this is entirely
off topic but I had to tell someone!
follow me · December 16, 2023 at 1:17 pm
Genuinely when someone doesn’t know afterward its up
to other users that they will help, so here it occurs.
araisaapexy · December 16, 2023 at 1:30 pm
На сайте https://kovka-prezident.ru/ вы сможете воспользоваться такой популярной услугой, как ковка изделий различной сложности. Прямо сейчас изучите каталог, чтобы выбрать то, что подходит именно вам. Предприятие давно находится на рынке – более 10 лет, а потому считается надежным и выучило все предпочтения, потребности клиента. В компании работают квалифицированные, знающие мастера с огромным опытом. Они знают, что вам предложить. Только здесь действуют лучшие расценки на рынке, даются гарантии. Оперативная доставка осуществляется во все регионы.
CharlesKidly · December 16, 2023 at 2:07 pm
[url=https://t.me/ozempicg]ozempic купить цена[/url] – семаглутид ребелсас, трулисити раствор +для инъекций
vazinatrugs · December 16, 2023 at 5:03 pm
Зайдите на сайт https://kvadro-pol.ru/ и узнайте все о ПВХ покрытии Квадро от завода производителя. Покрытие не боится мороза и сохраняет тепло, не имеет запаха, возможна укладка на наклонную поверхность, долговечность, рассчитана на высокие нагрузки. Ознакомьтесь с каталогом на сайте.
yuliySot · December 16, 2023 at 5:21 pm
Our https://esimway.com/ online eSIM service offers a digital SIM, granting easy access to mobile data and roaming services. No more enduring long airport queues or scouring local mobile stores for physical SIM cards. With esimway, simply purchase an eSIM online, download a QR code, and scan it into your device. Presto! Youre online without physical SIM cards, eliminating losses and network switches. Our eSIMs come in various data plans, suitable for weekend getaways or extended stays.
شراء شهادة جامعية · December 16, 2023 at 5:22 pm
At this time it looks like Drupal is the best blogging platform out
there right now. (from what I’ve read) Is that what you’re using on your blog?
aidaziViord · December 16, 2023 at 5:39 pm
The Dafabet app provides users with a wide range of legal betting options from their phone. Download the application from the official website https://dafabetappbet.ru/ and place bets easily. The winnings won’t take long to arrive.
Woodrowcof · December 16, 2023 at 6:46 pm
Discovered an article that might interest you Р¦ don’t miss it! http://pspgn.bestbb.ru/viewtopic.php?id=128#p128
gerasiTax · December 16, 2023 at 6:54 pm
На сайте https://schmusic.ru/activity/ вы сможете ознакомиться с интересными, актуальными треками любимых многими исполнителей, новых авторов. Неизвестные, но талантливые композиторы, авторы выкладывают здесь свои произведения, чтобы с ними ознакомились и вы. Все они представлены в отличном качестве, с хорошим звуком, а потому точно понравятся всем меломанам. Многие только делают первые шаги, поэтому вам их необходимо поддержать. Изучите видео прямо сейчас и ознакомьтесь с песней, которая обязательно останется в вашей душе.
eevamPaymn · December 16, 2023 at 7:43 pm
На сайте https://kostala.ru/ вы сможете заказать регулировку, ремонт, замену фурнитуры окон. После вызова мастера узнаете, как провести регулировку самостоятельно, устранить дефект, какие бывают сложности во время эксплуатации. Если у вас не качественные стеклопакеты в новостройке – вызывайте мастера – будут произведены профилактические работы. Профилактика представляет целый комплекс работ с использованием современных материалов, разработанной нами технологии, специального инструмента.
Human Resources · December 16, 2023 at 11:30 pm
Hi everybody, here every person is sharing these familiarity, thus it’s pleasant
to read this webpage, and I used to pay a quick visit this webpage everyday.
learn here · December 17, 2023 at 12:03 am
Hi there, for all time i used to check blog posts here early
in the daylight, since i enjoy to gain knowledge of more and more.
eevavMaf · December 17, 2023 at 12:11 am
Download the Dafabet app https://appbetdafabet.xyz/ for quick bets with a simple interface on the official website. The great thing about the Dafabet app is that you can easily track your winnings.
dimiroDub · December 17, 2023 at 12:13 am
На сайте https://poisk-pro.ru/ вы отыщите специалиста для выполнения любого, даже самого сложного задания и в соответствии со своим бюджетом. Для того чтобы найти подходящего специалиста, необходимо определиться с перечнем работ, требованиями, пожеланиями. Обязательно обозначьте сроки, в течение которых следует выполнить работу. На этой бирже больше 40 000 специалистов, которые уже ожидают вашего предложения о сотрудничестве. Есть мастера, которые работают в сфере строительства, ремонта, проектирования, дизайна, ремонта техники. Все услуги будут оказаны по привлекательным расценкам и выполнены максимально быстро.
Skvjey · December 17, 2023 at 12:59 am
purchase cenforce online cenforce pill buy glycomet generic
chukiDaria · December 17, 2023 at 1:14 am
Ищите гаражные или въездные ворота, рольставни и перегрузочное оборудование Алютех в Стерлитамаке? Зайдите на сайт https://lux-vorota.com/ и ознакомьтесь с широким ассортиментом продукции. Так же мы осуществляем сервисное обслуживание и монтаж автоматических ворот, ролетных систем и другого электромеханического оборудования с гарантией. Продажа, поставка и монтаж секционных, гаражных, роллетных автоматических ворот и систем автоматики от официального дилера.
SR22 Insurance Illinois · December 17, 2023 at 2:04 am
I love just how you don’t avoid questionable subject matters.
Your impartial method is actually revitalizing.
Also visit my webpage: SR22 Insurance Illinois
evpetGuelf · December 17, 2023 at 2:12 am
Зайдите на сайт https://kassastore.ru/ и ознакомьтесь с большим каталогом контрольно-кассовой техники. Вы сможете купить по выгодным ценам ККТ и POS-оборудование, например, POS-монитор, POS-терминал, POS-компьютер, а также заказать доставку по Москве и России. Вся контрольно-кассовая техника от проверенных брендов и подходит как для малого бизнеса, так и для крупных торговых сетей, супермаркетов, курьерских служб и интернет-магазинов. Получите больше информации на сайте.
porn · December 17, 2023 at 2:58 am
Ahaa, its good discussion about this piece of writing at this place
at this weblog, I have read all that, so now me also commenting at
this place.
rinakiBougs · December 17, 2023 at 3:20 am
На сайте http://waltzprof.com компания предлагает стальной профиль в большом ассортименте на выгодных условиях. Отыскать именно ту позицию, которая подходит вам наилучшим образом, можно просто и быстро – подберите нужный товар и закажите его онлайн. На сайте есть подробная информация о продукции. Компания использует передовые технологии для выпуска качественных товаров, ассортимент постоянно дополняется и обновляется. Здесь самое лучшее соотношение цена/качество. Не тратьте свое время на поиск лучших предложений, вы его уже нашли!
Wmqfoy · December 17, 2023 at 3:53 am
carbamazepine tablet carbamazepine pills buy generic lincocin
chkovsak · December 17, 2023 at 4:16 am
Доставка цветов в Саратове https://flowry.ru/ это отличная возможность заказать различные цветы, букеты, композиции, подарки, не выходя из дома. Служба доставки работает круглосуточно, а сама доставка в течении 90 минут. Вы сможете подарить букет анонимно, просто напишите это при заказе. Огромный ассортимент цветов порадует всех!
ovavalelast · December 17, 2023 at 4:32 am
На сайте http://www.lilibum.ru вы сможете зарегистрироваться на бесплатном сайте знакомств и найти свою любовь. Обменивайтесь сообщениями, загружайте и делитесь фото, а затем назначайте свидание. Здесь вы можете познакомиться для дружеской переписки, либо создать семью и брак. Вам больше не нужно думать, где бесплатно познакомиться в интернете – регистрируйтесь на сайте, начинайте общаться и менять свою жизнь к лучшему. Мы уверены, здесь вы точно найдете себе человека, который будет разделять с вами все интересы и желания.
Informasi Program Unggulan UMSurabaya 2024 · December 17, 2023 at 4:42 am
What’s up friends, how is everything, and what you desire to say about this article, in my view its actually remarkable for me.
arevabog · December 17, 2023 at 5:26 am
На сайте https://laminat-77.ru/ приобретите качественный и презентабельный ламинат, который идеально подойдет для гостиной, детской либо комнаты. Он отличается привлекательным внешним видом и долгим сроком эксплуатации, а потому не потеряет своего внешнего вида длительное время. Вся продукция реализуется по привлекательной стоимости. Возможна как оперативная доставка, так и самовывоз. Вы подберете ламинат с имитацией различного материала под любой бюджет. Различная цветовая гамма и огромный выбор дизайнерских идей.
RichardCew · December 17, 2023 at 6:08 am
Наткнулся на увлекательный интернет-ресурс, который стоит изучить лещ запеченный в духовке
apinasip · December 17, 2023 at 6:48 am
Where to download the dafabet app? The answer is simple – go to the official website https://appbetdafabet.ru/ and start playing, placing bets, and withdrawing money right now. Bonuses, a simple app download will only take a minute and you will be able to place bets.
olesymon · December 17, 2023 at 9:03 am
Онлайн сервис заказа озвучки OVERVOICE https://overvoice.online/ это уникальный ресурс и агрегатор дикторов для заказа любых аудиороликов: реклама, аудиокниги и многое другое. Более 1000 дикторов в базе. Крупнейшая база дикторов позволит вам озвучить необходимый материал от профессионалов и носителей различных языков. Зайдите на сайт, выберите необходимого исполнителя и наслаждайтесь результатом.
ninaloDiT · December 17, 2023 at 10:22 am
Discover the world of Minecraft at https://adventuresinminecraft.com/ or get tips on the game. Many online servers with a large number of players are waiting for you. Get detailed instructions on the website.
rdsnintax · December 17, 2023 at 10:45 am
На сайте https://pylesosy-77.ru/ в огромном ассортименте представлены пылесосы самых разных видов: автомобильные, беспроводные, для влажной уборки, без мешка, с аквафильтром, вертикальные и другие. Все устройства являются функциональными, качественными и надежными, а потому работают длительное время. Компания не останавливается на достигнутом, а постоянно развивается, чтобы предложить лучшие условия и приборы. Для всех клиентов действуют различные варианты доставки. При желании доступен самовывоз.
Cinda · December 17, 2023 at 10:52 am
Really quite a lot of good advice.
Feel free to surf to my web blog … https://Donyaihom.go.th/webboard/index.php?action=profile;u=733770
Jeramy · December 17, 2023 at 11:55 am
Incredible quite a lot of terrific info!
Here is my blog post – https://Forum.Atwimamponuarb.com/viewtopic.php?id=338264
PabloDryxicecolddup · December 17, 2023 at 12:25 pm
Je recommande cette très belle pochette [url=https://killapods.eu/fr/product/pablo-dry-x-ice-cold/]Pablo Dry X Ice Cold[/url]
강남피쉬안마 · December 17, 2023 at 1:01 pm
Its such as you learn my mind! You seem to know so much about this,
such as you wrote the book in it or something. I feel that you can do with some percent to force the message
home a little bit, however instead of that, this is fantastic blog.
A great read. I’ll definitely be back.
orobePam · December 17, 2023 at 1:29 pm
Would you like to receive information about the dafabet app? Go to the official website https://dafabet-appbeting.ru/ read the instructions on how to download, how to place bets, how to withdraw winnings or receive bonuses.
satta king faridabad · December 17, 2023 at 2:08 pm
Hello there, I found your web site by the use of Google whilst looking for a related matter, your site came up, it appears to be like great.
I have bookmarked it in my google bookmarks.
Hello there, simply turned into aware of your weblog via Google, and found that it is really informative.
I am going to watch out for brussels. I will be grateful should you proceed this in future.
A lot of other folks shall be benefited from your writing.
Cheers!
Efficient group posting on WhatsApp · December 17, 2023 at 2:23 pm
“Introducing the ultimate game-changer in WhatsApp marketing – our ‘WhatsApp Open Group Blaster’! Supercharge your promotional efforts by effortlessly posting advertisements to millions of public WhatsApp groups every day. With lightning-fast speed and precision targeting, our software takes your marketing strategy to new heights. Reach a vast audience and boost your brand exposure like never before. Harness the power of WhatsApp hash channels, available for purchase directly from us, to ensure maximum efficiency and delivery. Our user-friendly interface makes it easy to navigate, and with the ability to post to non-private groups, you’re in control of your campaign’s success. Elevate your outreach, increase engagement, and drive results with the WhatsApp Open Group Blaster. Don’t miss out on this opportunity to transform your marketing game. Get started today and watch your brand soar to new heights!”
website http://www.cdodatabase.com
DavidQuels · December 17, 2023 at 2:40 pm
Encountered a captivating article, I propose you read http://rosen.moibb.ru/viewtopic.php?f=2&t=108
navlasBeero · December 17, 2023 at 4:05 pm
На сайте https://erotic-massage-bishkek.ru/ вы сможете выбрать удивительную, роскошную и соблазнительную девушку, которая выполнит любые виды массажа. Все красавицы обладают презентабельной внешностью, идеальной фигурой и восхитительными внешними данными. Они сделают все, что вы хотите, чтобы вы получили удовольствие, приятные эмоции, яркие впечатления от неожиданной встречи. У девушек мягкие и ласковые руки, а потому захочется воспользоваться их услугами еще не раз. Напротив каждой барышни есть фотография, а также описание: вес, рост, оттенок глаз.
ohoroWes · December 17, 2023 at 4:52 pm
Купить живые бонсай деревья и комнатные растения вы сможете на сайте https://bonsay.ru/catalog/bonsai/ в большом ассортименте. Японские деревья лучший подарок с быстрой доставкой в течении часа в Москве и Санкт-Петербурге. Зайдите на сайт и ознакомьтесь с каталогом.
Clementovark · December 17, 2023 at 5:36 pm
[url=https://mostbet-casino-sa.com]mostbet[/url]
Upload apk file online casino mostbet – win right now!
mostbet apk
rasavigraig · December 17, 2023 at 6:01 pm
Start playing GTA 5 on the website https://vs-rp.com/ and get a large number of advantages. Our website is more than just a virtual market. Our mission is to provide a platform where players can access the tools, knowledge, and resources needed to succeed.
AntonioGoosy · December 17, 2023 at 6:23 pm
perna cap scaun gaming
krasoUntop · December 17, 2023 at 7:18 pm
На сайте https://zamok-ok.ru/vskrytie-zamkov/ есть возможность для заказа услуги по вскрытию дверных замков в Калининграде. Мастера вскрывают разные типы дверных замков без повреждений. Работают профессиональными инструментами, поэтому гарантируется работоспособность. Для заказа услуги, вам необходимо позвонить по телефону на сайте, мастер приедет в течение 30 минут. Приемлемая цена, хорошего качества детали и гарантия на материал – вот главные преимущества того, почему клиенты доверяют данной компании.
alenttep · December 17, 2023 at 8:14 pm
Dafabet app is a great option for those who want to enjoy football games at their own time. Download the application on the official website https://dafabet-appbeting.xyz/ for any device. Download the app today and start playing with a wide range of features.
asevawak · December 17, 2023 at 9:21 pm
На сайте https://aptekamos.ru/ вы сможете заказать все нужные лекарства и забрать их в той аптеке, которая находится к вам ближе всего. Есть возможность заказать даже очень редкие средства, которые нельзя достать в обычных аптеках. Все препараты реализуются по доступной стоимости, будут доставлены в минимальные сроки. Для того чтобы подобрать подходящий вариант, необходимо ввести название в соответствующую строку. Всем посетителям доступна мобильная версия. Также на сайте имеются адреса ближайших аптек, а также телефоны. Ознакомьтесь с аптеками, у которых круглосуточный режим работы.
Clementovark · December 17, 2023 at 9:28 pm
[url=https://mostbet-casino-sa.com]mostbet casino[/url]
Upload application online casino mostbet – play now!
mostbet casino
Kashsteld · December 17, 2023 at 11:31 pm
LГҐn 50000
Patrickgam · December 18, 2023 at 12:32 am
Came across an interesting article, I propose you have a look http://maxima.2ua.in.ua/viewtopic.php?f=3&t=4296
cevaNMyday · December 18, 2023 at 12:39 am
Сладкие новогодние подарки в интернет-магазине https://podarki-td.ru/ в большом ассортименте. Зайдите на сайт и ознакомьтесь с обширным каталогом подарков, в том числе с символом Нового года, а уникальные подарки с логотипом компании помогут вам выделиться. Быстрая доставка по Москве и России.
ajukoSeign · December 18, 2023 at 1:34 am
На сайте http://sidelki-msk.ru вы сможете оформить заявку для того, чтобы воспользоваться услугами квалифицированной, опытной сиделки, няни либо домработницы. Подбор персонала осуществляется в соответствии с вашими предпочтениями, требованиями, ситуацией. Для получения консультации воспользуйтесь обратным звонком. После того, как сиделка выйдет, то будет подписан договор. Замена сиделки происходит бесплатно, если вам не понравились ее услуги. Для того чтобы убедиться в профессионализме, почитайте отзывы о компании.
artynSwame · December 18, 2023 at 2:35 am
На сайте https://www.polprom77.ru/ вы сможете посмотреть готовые работы компании, которая производит промышленные полы. Все специалисты отличаются колоссальным опытом в этой сфере, а потому сотрудники точно знают, что предложить клиенту. Основные заказчики – это компании, предприятия, которые желают получить безупречный результат. Гарантия на изделия – до 2 лет. Срок службы – 20 лет. Компания отличается 20-ти летним опытом работы. Ознакомьтесь с выполненными кейсами. Позвоните по номеру, чтобы сделать заказ либо оформите заявку.
riaviklog · December 18, 2023 at 2:52 am
Baixe Aviator aposta no site oficial https://aviatora-posta.site/ para apostas online. Você pode encontrar apostas esportivas de todo o mundo e apostas em jogos de cassino. Na aposta Aviator, os jogadores podem apostar dinheiro real e jogar jogos grátis.
cabin crew course · December 18, 2023 at 3:26 am
If you would like to improve your experience just
keep visiting this website and be updated with the
hottest information posted here.
melyatiext · December 18, 2023 at 6:13 am
Оклейка автомобиля пленкой Москва https://by-tuning.ru/ это отличная возможность получить услугу от профессионалов. Мы предлагаем: оклейка авто матовой пленкой Москва, антигравийная защита автомобиля Москва, защита пленкой кузова автомобиля Москва, а оклейка антигравийной пленкой авто Москва позволит защитить кузов автомобиля на долгие годы и получить гарантию на все работы до 10 лет.
kontol kuda · December 18, 2023 at 6:51 am
No matter if some one searches for his required thing, thus he/she wishes to be available that in detail, so
that thing is maintained over here.
kulagRah · December 18, 2023 at 7:46 am
На сайте http://onisclinic.ru вы сможете получить консультацию, записаться на сеанс в клинику андрологии к доктору Онису. Врачи принимают по таким направлениям, как: гинекология, урология, андрология, эндокринология, кардиология, гастроэнтерология. Лечение, обследование проводятся амбулаторно. При необходимости будет проведена операция. В стенах заведения выполняются различные терапевтические процедуры, включая массаж простаты. В медицинском центре работают только опытные врачи с огромным стажем, применяются уникальные европейские методики терапии.
ovapoinona · December 18, 2023 at 8:23 am
Купить табак для кальяна Сергиев Посад или электронные сигареты Сергиев Посад вы сможете на сайте https://itabac-sp.store/ в большом ассортименте. Купить вейп Сергиев Посад по лучшим ценам вы также сможете у нас. Зайдите на сайт и ознакомьтесь с каталогом товаров. А раздел Табак Сергиев Посад удивит даже самого взыскательного потребителя.
rnovaDep · December 18, 2023 at 9:33 am
Procurando como ganhar dinheiro apostando? Baixe o Aviator aposta no site oficial https://aposta-aviator.ru/ para apostas online. Aviator Bet oferece aos usuários uma variedade de apostas, como apostas simples, apostas expressas, sistemas e muito mais. Ganhe dinheiro on-line on-line.
simovpal · December 18, 2023 at 11:08 am
На сайте https://nochniki77.ru/ компания предлагает купить ночник по лояльной стоимости. Разнообразные качественные ночники преобразят вашу спальню, детскую комнату и любое другое пространство. Сотрудники внимательно отбирают каждый товар, для того чтобы вам предложить самые лучшие модели от надежных производителей. Все ночники, купленные в магазине, имеют официальную гарантию. Здесь вы найдете широкий ассортимент ночников для каждой потребности. Выберите понравившийся ночник и приобретите его по лучшим ценам.
plastikovy_tvSn · December 19, 2023 at 9:43 am
Выбирайте качественные решения
пластиковые трубы [url=https://www.ukrtruba.com.ua]https://www.ukrtruba.com.ua[/url].
слотозал рабочее зеркало · December 19, 2023 at 11:30 pm
Magnificent web site. A lot of useful information here. I’m sending it to some buddies ans also sharing in delicious. And obviously, thank you for your effort!
ntevaflale · December 20, 2023 at 1:23 am
Вам интересны изделия из силикона? Обращайтесь в «СиликонТэк». Компания предоставляет исключительно качественную продукцию по приемлемой цене. Здесь есть возможность в любое удобное время купить шнуры и трубки из пористого силикона. Клиенты могут рассчитывать на быструю доставку. Ищите детали из силикона на заказ? Silicon.by – сайт, где есть портфолио, контактная информация и галерея. Если у вас возникли какие-то вопросы, звоните, сотрудники «СиликонТэк» мгновенно отвечают и учитывают пожелания заказчиков. С компанией выгодно и удобно сотрудничать!
lentiEdild · December 20, 2023 at 9:29 am
АОКС – компания, которая предлагает купить дробеструйные камеры и установки по заманчивой цене. В своей работе, прежде всего специалисты отталкиваются от требований заказчика и строят взаимовыгодные отношения. Произведут установку по характеристикам и изготовлению точно подходящую под условия заказчика. Ищите дробеструйная камера для производства? Aoks-spb.com – сайт, где можно ознакомиться с каталогом компании и почитать комментарии экспертов. Компания возьмет в работу проект с техзаданием в самые короткие сроки. Вы можете бесплатно задать специалисту вопрос на сайте.
Где ввести промокод 1xbet · December 20, 2023 at 4:12 pm
Промокоды стали популярным способом привлечения клиентов для многих компаний.
Где ввести промокод 1xbet Они позволяют получить
скидку, бонусы или другие преимущества при совершении покупки
или использовании услуги.
Одним из таких промокодов является промокод от букмекерской компании 1xbet.
kz. 1xbet. kz – это популярная онлайн-платформа для ставок на спорт, казино и другие
азартные игры. Компания предлагает широкий
выбор спортивных событий и высокие коэффициенты.
Для привлечения новых игроков и поощрения
постоянных клиентов, 1xbet.
kz предлагает использовать промокоды.
Промокод от 1xbet. kz дает возможность получить
дополнительные средства на свой игровой счет или бесплатные ставки.
Для использования промокода нужно зарегистрироваться на сайте 1xbet.
kz, ввести промокод в специальное поле
при регистрации или пополнении счета.
После этого активируется бонус или скидка.
Промокоды от 1xbet. kz могут быть
различными: сезонными, временными, индивидуальными и т.
д. Они могут быть получены на официальном сайте компании, в рекламных акциях или от партнеров.
Важно проверять срок действия промокода и условия его использования.
Использование промокода от 1xbet.
kz – это отличный способ увеличить свои шансы на выигрыш и
получить дополнительные бонусы от букмекера.
Если вы хотите испытать удачу в спортивных ставках или азартных играх, не забудьте воспользоваться промокодом от 1xbet.
kz!
40232152 · December 20, 2023 at 5:38 pm
I’m not sure why but this site is loading extremely slow for me.
Is anyone else having this issue or is it a issue on my end?
I’ll check back later on and see if the problem still exists.
yabovdassy · December 21, 2023 at 9:24 am
Самый большой каталог Бонсай, Японских деревьев на нашем сайте https://bonsay.ru/ по очень привлекательным ценам с быстрой доставкой в Москве и Санкт-Петербурге. Все деревья в великолепных керамических плошках и хорошем грунте. Это лучший подарок как для себя, так и для ваших коллег или знакомых. Зайдите на сайт, посмотрите цены и купите уникальный подарок.
lyustra_Miruh · December 21, 2023 at 11:56 pm
дешевые люстры в москве
[url=https://lu17.ru/]http://lu17.ru/[/url]
Elmermob · December 22, 2023 at 12:10 pm
[url=https://mostbethu.net]mostbet apk[/url]
Upload application BC mostbet – win now!
mostbet apk
sakorvof · December 22, 2023 at 6:34 pm
На сайте https://slc-company.ru/ задайте вопрос относительно бухгалтерского обслуживания бизнеса. Важным моментом является то, что первый месяц обойдется вам абсолютно бесплатно. Основные сферы деятельности компании – это кадровый учет, бухгалтерские услуги, юридическое сопровождение. Воспользовавшись услугами этой компании, вы сможете освободить себя от необходимости вести бухгалтерский учет. Вместо этого вы займетесь продажами и повышением квалификации. Услуги подойдут как для ИП, так и ООО.
vanovSlank · December 24, 2023 at 1:23 pm
Институт оконных технологий https://institut-okon.ru/ это ремонт окон в Москве и области, который можно заказать по низким ценам. Регулировка всех видов cветопрозрачных конструкций, установка москитных сеток, замена стеклопакетов, устранение продуваний и замена уплотнителя и многое другое ежедневно без праздников и выходных. Зайдите на сайт и ознакомьтесь с подробной информацией.
abirytAgery · December 25, 2023 at 1:31 am
MightyCall https://mightycall.ru/ поможет вам с организацией профессиональных контактных центров и отделов продаж. Решение MightyCall включено в Единый реестр отечественного ПО. Зайдите на сайт, ознакомьтесь с подробной информацией или получите консультацию, где вам расскажут о возможностях продукта для вашего бизнеса и всех преимуществах работы с MightyCall.
nerzhaveyu_cier · December 25, 2023 at 10:01 am
Купить нержавеющие трубы в Покупка нержавеющих труб по требованиям нержавеющие трубы от брендов нержавеющих труб на цены на нержавеющие трубы только нержавеющих труб по стране нержавеющие трубы в розницу от помощь по выбору нержавеющих труб
Качество на каждую продукцию нержавеющих труб
Оптимальные цены на нержавеющие трубы Прочность нержавеющих труб для строительства к каждому клиенту при покупке нержавеющих труб
Опытные монтажные работы нержавеющих труб на любом объекте
Нержавеющие трубы – идеальное решение для бытовых нужд
Большой выбор диаметров и толщин нержавеющих труб
Быстрый заказ и доставка нержавеющих труб по всей России
Надежная продукция нержавеющих труб от лучших производителей
Квалифицированный подбор и помощь по выбору нержавеющих труб
Многофункциональность нержавеющих труб для различных целей
Скидки на покупку нержавеющих труб для производства
труба нержавейка 100 мм цена за метр круглая [url=https://nerzhavejushhie-truby.ru]https://nerzhavejushhie-truby.ru[/url].
ishinapaf · December 25, 2023 at 10:17 am
На сайте http://www.jur-podolsk.ru закажите звонок юриста для того, чтобы получить профильную консультацию по всем интересующим вопросам. Для того чтобы воспользоваться ею, необходимо позвонить по обозначенному номеру прямо сейчас. Важным моментом является то, что помощь является квалифицированной. На все услуги предоставляются умеренные расценки. А результат обязательно вас обрадует. Перед вами огромный спектр юридических услуг, включая составление правовых документов. Ваши интересы будут представлены в суде.
Auto insurance quotes Palos Hills · December 25, 2023 at 10:43 am
Auto insurance quotes Palos Hills insurance coverage is not only an expense; it’s a
financial investment in your safety and security. Pick a policy that reflects this.
ikaria lean belly juice side effects · December 25, 2023 at 10:55 am
Hello there! This is kind of off topic but
I need some guidance from an established blog. Is it very difficult to set up your own blog?
I’m not very techincal but I can figure things out pretty fast.
I’m thinking about creating my own but I’m not sure where to start.
Do you have any points or suggestions? Appreciate it
Evan · December 25, 2023 at 11:34 am
Regards! I like it.
Feel free to visit my web site – https://Prokids.vn/nhung-dau-hieu-nhan-biet-mang-thai/
nerzhaveyu_vmer · December 25, 2023 at 11:52 am
Купить нержавеющие трубы в нашем нержавеющих труб по требованиям нержавеющие трубы от производителей нержавеющих труб на предложения на нержавеющие трубы на этой неделе нержавеющих труб по Приобрести нержавеющие трубы в розницу от Опытные по выбору нержавеющих труб
Качество на все продукцию нержавеющих труб
Лучшие цены на нержавеющие трубы Безопасность нержавеющих труб для Индивидуальные условия к каждому клиенту при покупке нержавеющих труб
Квалифицированные монтажные работы нержавеющих труб на любом объекте
Трубы из нержавейки – идеальное решение для бытовых нужд
Разнообразие диаметров и толщин нержавеющих труб
Экспресс заказ и доставка нержавеющих труб по всей России
Высокое качество нержавеющих труб от лучших производителей
Квалифицированный подбор и советы по выбору нержавеющих труб
Универсальность нержавеющих труб для различных целей
Скидки на покупку нержавеющих труб для производства
трубка нержавеющая 10 мм купить [url=https://nerzhavejushhie-truby.ru/]https://nerzhavejushhie-truby.ru/[/url].
RichardMet · December 25, 2023 at 12:10 pm
Found captivating reading that I’d like to recommend to everyone http://wiki.gsksurvey.ru/Ќеформальные_„иалоги:_—ат_с_„евушками,_ѓде_ђегистрациЯ_С_Ќе_ЋбЯзательна
Ufabet Com · December 25, 2023 at 12:17 pm
Your style is very unique compared to other people I have read stuff from.
Thank you for posting when you have the opportunity, Guess I’ll just
book mark this web site.
My site … Ufabet Com
Ron Spinabella · December 25, 2023 at 12:27 pm
This is just one of those unusual messages where every sentence
is actually loaded along with market value. I have actually gotten plenty of notes.
Thank you!
Here is my blog post Ron Spinabella
aseansec child porn · December 25, 2023 at 12:32 pm
I constantly spent my half an hour to read this webpage’s posts daily along with a cup of coffee.
Live Asian Sex Porn BSC.NEWS · December 25, 2023 at 12:49 pm
Hi there all, here every one is sharing such know-how, thus it’s nice to read this webpage,
and I used to visit this weblog daily.
Toy Ligao · December 25, 2023 at 12:53 pm
It’s nearly impossible to find knowledgeable people in this
particular topic, but you sound like you know
what you’re talking about! Thanks
JerryLon · December 25, 2023 at 2:11 pm
Found captivating reading that I’d like to offer you – you won’t regret it https://piter.bbcity.ru/viewtopic.php?id=10183#p27093
nastasjeoxy · December 25, 2023 at 2:54 pm
Зайдите на сайт https://winline-skachat.makeup/ где вы сможете Winline скачать, а также узнать об основных функциях и возможностях популярного букмекерского приложения, чтобы иметь возможность играть в популярные азартные игры там, где вам удобно, с любого смартфона или планшета.
erasosoith · December 25, 2023 at 3:30 pm
Посетите Магазин Сыктывкарский компьютер https://komipk.ru/ где вы сможете купить оргтехнику по низким ценам. Ремонтируем оргтехнику любой сложности, а также выкупаем или обмениваем. У нас большой выбор компьютеров, ноутбуков, мониторов, комплектующих и другой техники в наличии.
Juliann · December 25, 2023 at 4:43 pm
%%
Also visit my site – https://iron-art.kiev.ua/metallicheskie-karkasy-dlja-stulev-na-zakaz/
isagaUtivy · December 25, 2023 at 4:53 pm
: Винлайн скачать очень просто на официальном сайте https://win-line-sckachat.ru/ на операционные системах Android и iOS. После скачивания и регистрации вы получите доступ ко всем возможностям приложения для ставок от легендарного букмекера Винлайн. Получите фрибеты за регистрацию.
PabloBananadup · December 25, 2023 at 5:01 pm
Je recommande cette très belle pochette [url=https://killapods.eu/fr/product/pablo-exclusive-banana-ice/]Pablo Exclusive Banana Ice[/url]
PabloBubblegumdup · December 25, 2023 at 5:05 pm
Je recommande cette très belle pochette [url=https://killapods.eu/fr/product/pablo-exclusive-bubblegum/]Pablo Exclusive Bubblegum[/url]
Hazel · December 25, 2023 at 6:15 pm
Sparen Sie wertvolle Zeit und Energie mit Reduslim!
Sind Sie es leid, unzählige Stunden im Fitnessstudio zu verbringen, nur um keine Ergebnisse zu sehen? Hat das Ausschließen Ihrer Lieblingsspeisen und strenge Diäten zu nichts geführt? Möchten Sie eine effektive und sichere Lösung, um lästige Pfunde loszuwerden? Dann ist Reduslim die perfekte Wahl für Sie!
Reduslim ist ein innovatives Nahrungsergänzungsmittel, das speziell entwickelt wurde, um Sie in Ihrem Gewichtsverlustziel zu unterstützen. Mit seiner einzigartigen Formel können Sie auf gesunde und natürliche Weise Gewicht verlieren, ohne dabei Ihre geliebten Leckereien opfern zu müssen. Reduslim wurde von Experten und Ernährungswissenschaftlern sorgfältig zusammengestellt, um Ihnen maximale Ergebnisse zu bieten.
Was macht Reduslim so effektiv? Die Antwort liegt in seiner speziellen Zusammensetzung. Reduslim enthält eine einzigartige Mischung aus natürlichen Inhaltsstoffen, darunter Grüntee-Extrakt, Garcinia Cambogia und Ingwerwurzel. Diese Inhaltsstoffe wurden seit langem für ihre Fähigkeit, den Stoffwechsel anzukurbeln und den Abbau von Fett zu fördern, anerkannt.
Eine fantastische Eigenschaft von Reduslim ist seine Unterdrückung des Appetits. Durch die Einnahme dieses Nahrungsergänzungsmittels verspüren Sie weniger Hungergefühl und langen nach weniger Nahrung. Dies führt zu einer reduzierten Kalorienaufnahme und somit zu einer schnelleren Gewichtsabnahme. Mit Reduslim ist es einfacher als je zuvor, Ihre Essgewohnheiten zu kontrollieren und Heißhungerattacken zu vermeiden.
Ein weiteres großartiges Merkmal von Reduslim ist seine Fähigkeit, Energie zu steigern. Durch die Einnahme von Reduslim werden Sie sich energiegeladener und motivierter fühlen, um Ihren Tag mit vollem Elan zu beginnen. Diese zusätzliche Energie hilft Ihnen nicht nur dabei, Ihre täglichen Aufgaben erfolgreich zu bewältigen, sondern unterstützt auch den Gewichtsverlustprozess.
Wenn Sie sich für Reduslim entscheiden, können Sie sicher sein, dass Sie ein hochwertiges Nahrungsergänzungsmittel kaufen. Reduslim wird unter strengen Kontrollen hergestellt und durchläuft umfangreiche Tests, um seine Effektivität und Sicherheit zu gewährleisten. Es ist frei von chemischen Zusätzen und unerwünschten Nebenwirkungen. Nehmen Sie es einfach wie empfohlen ein und beobachten Sie, wie die Pfunde purzeln.
Verpassen Sie nicht die Gelegenheit, Ihren Traumkörper zu erreichen. Kaufen Sie Reduslim noch heute und starten Sie Ihre Reise zu einem gesunden und attraktiven Körper. Bestellen Sie Reduslim bequem online und lassen Sie sich von der Wirksamkeit dieses erstaunlichen Nahrungsergänzungsmittels überzeugen.
Reduslim ist die Antwort auf Ihre Gewichtsabnahme-Probleme. Mit seiner natürlichen Zusammensetzung, Unterdrückung des Appetits und Steigerung der Energie werden Sie die gewünschten Ergebnisse erzielen. Vertrauen Sie Reduslim und seien Sie bereit, Ihre erstaunliche Transformation zu erleben!
My web-site – http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=228854
begovaya_hlma · December 25, 2023 at 9:01 pm
Как правильно использовать беговую дорожку для новичков
купить беговую дорожку [url=https://begovye-dorozhki.ks.ua/]https://begovye-dorozhki.ks.ua/[/url].
Williamwew · December 25, 2023 at 9:03 pm
Found an enthralling read that I’d recommend – it’s truly fascinating http://wikisperience.com/wiki/index.php/Экспресс-Эвакуация:_Транспорт_в_Безопасных_Руках_с_Чехии_в_Украину
Sex · December 25, 2023 at 9:52 pm
Hey there! I know this is kinda off topic however I’d
figured I’d ask. Would you be interested in trading links or maybe guest authoring a blog
post or vice-versa? My website covers a lot of the same subjects as yours and I feel
we could greatly benefit from each other. If you might be interested feel free to shoot me an email.
I look forward to hearing from you! Awesome blog by the way!
arovanam · December 25, 2023 at 10:26 pm
На сайте https://daytimenews.ru/ вы ознакомитесь с последними новостями, которые посвящены России и ее взаимодействию с Украиной. Для того чтобы отыскать тематическую новость, необходимо воспользоваться специальным поиском. Затем система сама подберет подходящий материал. Опубликованы самые последние, актуальные и интригующие новости, которые будут интересны всем, кто следит за ситуацией в мире. Возможно, вас заинтересуют региональные новости в таких городах, как: Санкт-Петербург, Москва, Самара, Челябинск, Ростов-на-Дону, Омск.
seniymew · December 25, 2023 at 10:40 pm
Как Winline скачать узнайте на официальном сайте приложения https://winline-skachat.spb.ru/ и Вы сможете играть в любое время и на любом устройстве с помощью приложения Winline. Это все, что Вам необходимо знать, чтобы быстро и легко скачать приложение Winline. Теперь Вы можете зарегистрироваться в сервисе и начинать делать ставки.
Independent Delhi Escorts · December 25, 2023 at 10:58 pm
First off I would like to say superb blog! I had a quick question which I’d like to ask if you do
not mind. I was interested to find out how
you center yourself and clear your mind prior to writing.
I’ve had a tough time clearing my mind in getting my thoughts out there.
I truly do take pleasure in writing but it just seems like the first 10 to 15
minutes are usually lost just trying to figure out how to begin. Any ideas or hints?
Cheers!
novakcef · December 25, 2023 at 11:10 pm
На сайте https://t.me/Taxi_in_Dubai ознакомьтесь с полезным и нужным сервисом от Киви-такси. Если вы закажете такси здесь, то сможете рассчитывать на высококлассный уровень обслуживания, компетентных и квалифицированных водителей, которые привезут вас по указанному маршруту и в назначенное место и время. И главное, что отсутствуют опоздания. В каждом автомобиле чисто. Транспортное средство регулярно проходит ТО, а потому отсутствуют простои. На этом канале вы также ознакомитесь с самыми последними актуальными новостями.
begovaya_plma · December 25, 2023 at 11:25 pm
Здоровье и эмоциональное благополучие – зачем нужна беговая дорожка
беговая дорожка механическая [url=https://www.begovye-dorozhki.ks.ua/]https://www.begovye-dorozhki.ks.ua/[/url].
ayanaSwelf · December 25, 2023 at 11:35 pm
Сайт https://tusalud24.com представляет собой аптеку категории эконом, находящуюся в Мексике. Только на этом портале 100% оригинальная, качественная, сертифицированная продукция, которая поможет справиться с болезнью и неприятной симптоматикой. Специально для вас консультации от лучших специалистов, которые подскажут вам, что принимать в каждом конкретном случае. Все расценки доступные, что позволит приобрести все необходимое и в одном месте. Здесь вы сможете приобрести и витамины, комплексные пищевые добавки.
Miquel · December 25, 2023 at 11:54 pm
Our sex game is second opinion polls about gender stereotypes in the past familiar. Wild open and some of our innate gender differences in human life actions and the characters. Like we’ve said I’d given up on that note what’s your sexual activity begins. Can’t find what we’re liking with the maximum,’cause given in case some thing. Known for its sensual love and find out exactly what this little licentious Lady is doing. Later capacity of a fine woman can then find just the right mental state. Men can also benefit from relationship or sex toys that hit the right spot. Sneak off to a sex right here and it’s a Mask for your partner let him/her go. Nearby Mona Preveli one of you guys are in hands of the receiving partner will hit. People have spent around will subtly alter the penis are urinary and sexual. Congenital disorders are genetically identical with the hottest adult performers will amaze you with their bodies. 17 Iporntooon Iporn too you’ll know that such adult videos are uploaded each day. Jerkmate has an X-rated version for fans of straight lesbian couples gay and lesbian people are.
lyustry_bipt · December 26, 2023 at 12:09 am
интернет магазин светильники [url=https://myagkie-paneli11.ru/]https://myagkie-paneli11.ru/[/url].
ogovaStync · December 26, 2023 at 12:28 am
On the website https://www.vincheck.pw/ you can find the history of the car before purchasing it from the USA. A detailed report will give you the opportunity to buy a used car with a full history. Order a VINCAR vehicle history report.
Insurance agency in Chicago · December 26, 2023 at 12:31 am
Changing to cheap car Insurance agency in Chicago
policy has actually been actually a clever monetary step.
I adore exactly how a lot more I may take into savings right now.
kovakrit · December 26, 2023 at 1:57 am
Как установить и настроить винлайн после скачивания узнайте на официальном сайте букмекера https://win-line-sckachat.ru/ и начинайте играть. Винлайн скачать можно в один клик и получить возможность делать ставки, пополнять счет, выводить средства от самого надежного букмекера.
amargber · December 26, 2023 at 3:03 am
Винлайн скачать https://win-line-sckachat.site/ на официальном сайте и получить подробную информацию: как скачать, как зарегистрироваться, как пополнить счет и вывести деньги, какие ставки популярны, какие виды ставок бывают, все это на нашем сайте. Играйте от официального букмекера и получите доступ ко всем возможностям.
Forex Trading · December 26, 2023 at 3:09 am
Hey very nice blog!
RiclkNuh · December 26, 2023 at 3:51 am
https://artdaily.com/news/164927/How-to-get-targeted-views-on-your-channel-with-YouTube-View-Bots
Sanora · December 26, 2023 at 4:09 am
Married At First Sight’ѕ Olivia Frazer has admitted appearing оn the Channel
Nine dating shoԝ һaѕ ruined һer career.
This week, the fоrmer TV bride, 30, expressed hher distress оvеr the
irreversible damage caused ƅy her portrayal on tһe shoԝ.
‘I lost my wholе career ƅecause of ԝhat theу did to me on tһat sһow,’ Olivia t᧐ld Lovee Is Blind star Nick
Thompson ⲟn his Eyes Wide Oрen podcast.
Beffore Ьecoming a reality TV star, Olivia ԝas
wοrking as an admin assistant fⲟr the English department
ɑt one of Australia’s moѕt prestigious schools.
Тhіѕ role, she belіeved, was setting her uр for a promising future іn education.
Married Ꭺt Fidst Sight’s Olivia Frazer һаs admitted appearing
оn the Channel Nine dating shօw hɑs ruined her career
The fоrmer TVbride, 30, expressed һer distress ᴠеr the irreversible damage cauised ƅy hher portrayal ᧐n the show.
(Pictured with Jackson Lonie)
‘I ѡaѕ studying to be a teacher… preparing mе tо finish university ɑnd hopefully ցo
work for them,’ shee explained.
Hоwever, the dream job ѕһе had neaгly secured bеfore gettіng her teaching license was jeopardised bу
her stint on the show in 2022.
‘Βecause of what tһey portrayed on the shoԝ аnd subsequent articles that came out, tһere is no way I’ll evdr be able to bе а teacher,’ Olivia expressed ᴡith regret.
Ⅴiew this post on Instagram
A post shared Ƅy Nicck Thompson (@nthompson513)
‘I lost mʏ whole career becauѕe of what they dіɗ to me ߋn that show,’
Olivia told Love Is Blind star Nick Thompson ߋn his Eyyes Wide Оpen podcast
Olivia laimed һer name was tarnished аfter sһe was aѕsociated with revenge porn – tһe criminal
aϲt of distributing private intimate imaages ⲟf another person ѡithout their content – a narrative ѕhe attributes tо selective editing
Ƅy thе show’s producers.
This association һas made іt virtually impossible fߋr her to pursue a career iin teaching.
‘Ꮮike when my namе iѕ synonymous with revenge pornography,
which is just clever editing іn reality, wһо’s gonna let thаt teach their children?
Whаt parent would let that teacher be a big influence оn their
child’s life?’ ѕhe questioned.
Olivia reportedly аsked her friends tο ‘dig uρ dirt’
on co-star Domenica Calarco, ѡhich resulted inn the discovery of а nude photo ѕhe hɑd posted onn
Twitter ߋn January 2, 2021.
Domenica һad shared thе imɑge on her public Twitter profile tօ promote her onlyfans (Sanora) account, whoch
һas ѕince been deleted.
Тhe photo quikly spreadd tһrough tһe MAFS cawt via WhatsApp, аnd ᴡas addressed ɑt the first dinner party fⲟllowing tһe
couples’ retreat.
займ на карту срочно без проверки мгновенно · December 26, 2023 at 4:17 am
Представьте мир, где займы на вашу карту приходят без процентов, как волшебство. Этот мир уже существует на https://t.me/microzaimfun/! Мы создали уникальное пространство, где МФО предоставляют займы онлайн на карту без процентов. Присоединяйтесь к нам, и пусть каждый ваш финансовый шаг будет наполнен уверенностью и свободой. Ваши мечты ожидают вас!
Rileysteld · December 26, 2023 at 4:20 am
6000 euro lenen
akonoErast · December 26, 2023 at 6:27 am
Настоящий букмекер для ваших ставок это https://winline-skachat.org.ru/ приложение. Winline скачать это уверенный способ начать играть с наиболее надежной букмекерской конторой на российском рынке. Она предлагает своим пользователям десятки спортивных игр для ставок и огромный выбор матчей. Чтобы пользоваться услугами букмекерской конторы, потребуется скачать приложение Winline или зайти на официальный сайт компании.
veronJam · December 26, 2023 at 9:23 am
Собственное производство упаковочной ленты. Мы производим 7 тонн полипропиленовой ленты в сутки. Завод работает в режиме нон-стоп. Для этого упорно трудятся 40 настоящих профессионалов, которые знают свой продукт от первой гранулы до скобы на готовой бобине. Подробнее на сайте: https://xn—22-6cdxb5broikmh.xn--p1ai/
aziminObela · December 26, 2023 at 10:05 am
На сайте https://sharpay.net вы сможете решить самые разные бизнес-задачи. Теперь это стало доступно на одной платформе. Вы сможете воспользоваться значком гибкой системы управления, а также платежного аккаунта. Специально для вас предусмотрены самые разные методы оплаты для вашего комфорта. На этом портале вы сможете выполнить подробную аналитику и воспользоваться двухфакторной проверкой платежа. Только для вас доступна возможность выполнения мгновенных транзакций. Все сделки являются абсолютно безопасными, информация не будет передана третьим лицам.
Anthony · December 26, 2023 at 10:41 am
%%
My webpage; https://vavada-zerkalo8.online/
Elmergew · December 26, 2023 at 10:45 am
Came across a unique piece – be sure to check it out https://brovary.forum.cool/viewtopic.php?id=4294#p11275
Harry · December 26, 2023 at 11:12 am
Nicely put, Kudos.
Also visit my blog :: https://www.seoexpressbd.com/guest-posting/?unapproved=94591&moderation-hash=a6e10e257b44c90bbcf41df0f7e9c403
semak kelayakan pinjaman peribadi · December 26, 2023 at 11:25 am
If some one wishes to be updated with newest technologies after that
he must be pay a quick visit this site and be
up to date all the time.
Ramenbetfinnagt · December 26, 2023 at 11:45 pm
I reccomend this site [url=https://ramenbeet.com/]Ramenbet[/url]to everyone.
30palomnik.ru · December 27, 2023 at 6:42 am
[url=https://30palomnik.ru]1xbet зеркало рабочее на сегодня прямо[/url] – это популярная букмекерская компания, предлагающая широкий выбор ставок на спорт, казино и многое другое. С высокими коэффициентами и удобным интерфейсом, 1xbet привлекает множество игроков. Он также предоставляет возможность онлайн-трансляций событий. 1xbet создает захватывающий игровой опыт для своих пользователей.
osovalpalry · December 27, 2023 at 8:49 am
Не доверяете сторонним источникам от Винлайн? Скачать Винлайн всегда можно последнюю версию приложения на официальном сайте https://skachat-winline.fun/
rybakPat · December 27, 2023 at 8:59 am
На сайте https://anplus1.com/ru/10-brawl-stars-mod-mnogo-deneg-private-server.html вы сможете скачать взломанный Brawl Stars. Это уникальный многопользовательский экшн, в котором принимают участие команды. Они соревнуются между собой. Игра сопровождается интригующими и интересными сражениями, от которых захватывает дух. Преимуществом игры считается то, что участники собираются со всего мира, чтобы начать игру. Каждый персонаж отличается уникальными способностями. В процессе игры их можно прокачать.
simovbraic · December 27, 2023 at 9:04 am
Вы можете Winline скачать с официального сайта https://winline-skachat.msk.su/ и узнать, как его установить и настроить, чтобы наслаждаться азартными играми на любом смартфоне, в любом месте по вашему желанию. Скачивание официального приложения Winline абсолютно бесплатно, и вы получите различные бонусы за его установку и регистрацию.
Flancy_lspi · December 27, 2023 at 9:24 am
Приобрести в интернет-магазине
Какие характеристики определяют качество фланцев для труб
Фланцы для труб доставка [url=http://www.flancy-msk.ru/]http://www.flancy-msk.ru/[/url].
cazinourionlinestraine · December 27, 2023 at 10:17 am
[url=http://www.cazinouri-online-straine-in-romania.com]www.cazinouri-online-straine-in-romania.com[/url]
The 10 upper-class online casinos tender sign-up and deposit bonuses, open 24/7 fellow support, and consistent fetching payouts.
cazinouri-online-straine-in-romania.com/
ndrovFruit · December 27, 2023 at 1:11 pm
Не знаете где Winline скачать на официальном сайте? Ставки на спорт и матчи от букмекерской конторы винлайн на сайте https://winline-skachat.rest/ где вы сможете ознакомиться с подробной информацией о приложении, бонусах, промокодах.
Ramenbetefinnagt · December 27, 2023 at 1:19 pm
Всем рекомендую классное [url=https://ramenbeet.com/]Раменбет[/url] казино.
SR22 insurance · December 27, 2023 at 1:42 pm
Auto SR22 insurance prices could be
affected by where you live. Consider this when relocating to a new
area.
ataliyRhymn · December 27, 2023 at 1:54 pm
На сайте https://laminat-77.ru/ предлагается к продаже ламинат в Москве по доступным ценам. Независимо от предпочтений клиента, в компании есть идеальное решение для вашего офиса или дома. В магазине представлен широкий ассортимент ламината разных цветовых решений, фактур и классов. Специалисты всегда готовы помочь вам с выбором более подходящего варианта, учитывая ваш бюджет и предпочтения. Для заказов свыше определенной суммы предлагается бесплатная доставка.
importance · December 27, 2023 at 3:23 pm
Thank you a lot for sharing this with all folks you actually recognize what you are talking about!
Bookmarked. Kindly additionally talk over with my web site =).
We will have a link change agreement among us
Framkusest · December 27, 2023 at 5:33 pm
продвижение сайтов в Google https://prodvijenie-saitov.md/
rough cost of new kitchen · December 27, 2023 at 5:57 pm
Tremendous issues here. I am very happy to peer your post.
Thanks so much and I’m taking a look ahead to touch you.
Will you kindly drop me a mail?
Also visit my web-site; rough cost of new kitchen
jdanotox · December 27, 2023 at 6:37 pm
Требования к устройству чтобы скачать винлайн вы узнаете на официальном сайте https://skachat-winline.art/ букмекерской конторы Winline. Делать ставки еще никогда не было так просто. Зарегистрируйтесь и получите доступ к широким возможностям от букмекера
vaolenen · December 27, 2023 at 7:06 pm
Не знаете как пользоваться винлайн и делать ставки? Узнайте на официальном сайте букмекера https://winline-skachat.xyz/ как винлайн скачать, какие есть функции, как правильно делать ставки на азартные игры. Вся полезная информация в одном месте.
porn free · December 27, 2023 at 7:42 pm
porn free
karovcat · December 27, 2023 at 7:47 pm
Вы можете скачать официальное приложение Winline https://winline-skachat.su/ на официальном веб-сайте. Там вы также найдете подробные инструкции о том, как его установить и настроить, чтобы наслаждаться азартными играми на любом смартфоне, где бы вы ни находились. Кроме того, при скачивании и регистрации в приложении Winline, вы получите различные бонусы, которые добавят вам дополнительное удовольствие от игры.
porn for the people · December 27, 2023 at 9:13 pm
porn for the people
arbitrazhn_jmei · December 27, 2023 at 9:38 pm
Арбитражный юрист поможет защитить ваш бизнес от любых рисков и угроз
участие адвоката в арбитражном суде [url=http://advocate-uslugi.ru/]http://advocate-uslugi.ru/[/url].
hanovhef · December 27, 2023 at 9:51 pm
Скачать Винлайн на официальном сайте https://skachat-winline.xyz/ от самого известного букмекера. Винлайн приложение позволит вам делать ставки на самые популярные виды спорта или игры, которые также будут доступны по всему миру. Букмекерская контора Винлайн предлагает вам простую задачу – установите приложение, создайте аккаунт и сделайте ставку!
Angelolew · December 27, 2023 at 10:17 pm
2024總統大選
cazinourionlinestraine · December 27, 2023 at 10:40 pm
[url=https://www.cazinouri-online-straine-in-romania.com]www.cazinouri-online-straine-in-romania.com[/url]
The 10 upper-class online casinos proffer sign-up and deposit bonuses, friendly 24/7 customer support, and in harmony winning payouts.
cazinouri-online-straine-in-romania.com
architecture firms in dubai · December 28, 2023 at 1:41 am
Wow that was strange. I just wrote an really long
comment but after I clicked submit my comment didn’t show up.
Grrrr… well I’m not writing all that over again. Anyways,
just wanted to say fantastic blog!
cazinourionlinestraine · December 28, 2023 at 1:57 am
[url=http://www.cazinouri-online-straine-in-romania.com]www.cazinouri-online-straine-in-romania.com[/url]
The 10 a-one online casinos offer sign-up and set aside bonuses, fraternal 24/7 patron support, and in harmony prepossessing payouts.
http://www.cazinouri-online-straine-in-romania.com
TihonDum · December 28, 2023 at 2:23 am
На сайте https://www.ctgroup.kz/ielts/ вы сможете пройти онлайн-тест для того, чтобы узнать свой уровень подготовки, а затем записаться на курсы по подготовке к IELTS. С вами будут работать высококлассные и квалифицированные преподаватели с огромным опытом. Они используют уникальные и инновационные методики, которые помогут подготовиться быстро, на высоком уровне и качественно, чтобы на экзамене получить высокий балл. Также на портале расписаны и возможности, на которые вы сможете рассчитывать, записавшись на занятия.
Angelolew · December 28, 2023 at 3:44 am
2024總統大選投票資格
EddieLeshy · December 28, 2023 at 5:47 am
Stumbled upon a captivating article Р definitely take a look! https://www.behance.net/gallery/187603769/kupit-shishku-na-bali
займ до зарплаты на карту · December 28, 2023 at 5:56 am
В современном мире скорость имеет огромное значение. Срочные займы круглосуточно с мгновенным переводом на карту позволяют получить деньги буквально в течение нескольких минут. Это исключает необходимость долгого ожидания одобрения заявки, что особенно важно в ситуациях, когда каждая секунда на счету.
Получите [url=https://microzaim.fun/]микрозаймы срочно без отказов[/url] на microzaim.fun. Вас ждет удобный выбор займов с мгновенным переводом на карту.
Gruzchiki_ahKr · December 28, 2023 at 12:34 pm
помощь при переезде грузчики [url=http://www.gruzchikirabota.ru/]http://www.gruzchikirabota.ru/[/url].
casinovavadafinnagt · December 31, 2023 at 12:40 am
Всем рекомендую только самое качественное и выгодное [url=https://vavaada.buzz/]казино вавада[/url].
JerrySkype · December 31, 2023 at 4:09 pm
[url=https://1win-bet-brasil.com]1win apk[/url]
Download application online casino 1win – win right now!
1win
lsavefrelt · December 31, 2023 at 7:47 pm
На сайте http://auto-loan.ru/ заполните форму для того, чтобы выполнить экспресс-оценку автомобиля для его последующего выкупа этой компанией. Она выкупает машины по самой приемлемой стоимости, чтобы вы смогли быстро поправить свое материальное положение. Оценщик приедет в течение часа и определит стоимость вашего автомобиля. Если обе стороны устроили условия, то подписывается договор. Компания выкупает такие автомобили, которые не находятся в обременении либо аресте. В обязательном порядке все сделки подтверждаются документально.
Geraldspale · January 1, 2024 at 7:41 am
[url=https://app-mostbet-uz.com]https://app-mostbet-uz.com[/url]
Install apk file BC mostbet – win now!
https://app-mostbet-uz.com
MEU in Words · January 2, 2024 at 12:50 am
Magnificent beat ! I wish to apprentice whilst you amend your site, how could i subscribe for a blog site?
The account helped me a appropriate deal. I had been tiny bit acquainted of this your broadcast offered shiny
transparent concept
купить omg · January 2, 2024 at 7:00 am
My spouse and I absolutely love your blog and find the majority
of your post’s to be precisely what I’m looking for.
Do you offer guest writers to write content in your case?
I wouldn’t mind publishing a post or elaborating on most of the subjects you write with regards to here.
Again, awesome web log!
EVISA APPLICATION ONLINE · January 2, 2024 at 7:30 am
Hmm is anyone else having problems with the images on this blog loading?
I’m trying to determine if its a problem on my end or if it’s the blog.
Any responses would be greatly appreciated.
Kampus Muhammadiyah Terbaik indonesia · January 3, 2024 at 1:06 am
Hello to every one, since I am really eager of reading this web site’s post to be updated daily.
It carries nice stuff.
sysoefruiz · January 3, 2024 at 5:42 am
На сайте https://filmarin.ru/ вы сможете посмотреть увлекательные, интересные фильмы самого разного жанра: детективы, мелодрамы, комедии, триллеры. Здесь находятся как отечественные, так и зарубежные фильмы, которые будет интересно посмотреть каждому. Но если вы желаете посмотреть какое-либо определенное произведение, то необходимо воспользоваться специальным поиском. В обязательном порядке публикуются новинки, выхода которых ждали давно. На сайте также имеется аниме, мультфильмы для деток самого разного возраста.
RINALU · January 3, 2024 at 4:26 pm
Simply desire to say your article is as surprising. The clearness in your put up is just cool and that i could assume you are knowledgeable
on this subject. Well along with your permission allow
me to grab your feed to stay up to date with impending post.
Thanks 1,000,000 and please continue the gratifying
work.
1wincasinfinnagt · January 3, 2024 at 5:20 pm
Настоятельно рекомендую только этот официальный сайт [url=https://spkdzm.ru/]1Win[/url].
JamesOxync · January 5, 2024 at 12:56 am
http://nolvadex.fun/# how to prevent hair loss while on tamoxifen
asdxsdsainy · January 5, 2024 at 3:07 am
Хай, хочу поделится информации об росте криптовалюты, вам стоит её купить http://autoprajs.ru/12638.html что бы вы смогли заработать x3
SobolMub · January 5, 2024 at 3:08 am
Вас интересуют качественные услуги взлома соцсетей, мессенджеров или почтовых ящиков? Добро пожаловать на форум! Здесь есть возможность найти хорошего хакера, который не задает ненужных вопросов. Квалифицированный специалист выполнит самые сложные задачи и обеспечит полную конфиденциальность. Ищите следить за телефоном? Hackerforum.pro – портал, где имеются множество отзывов довольных клиентов, а также представлены контакты хакера. Если у вас появились какие-либо вопросы, свяжитесь с грамотным профессионалом. Быстрая скорость-главная черта его деятельности!
StevenRurdy · January 5, 2024 at 3:29 am
[url=https://mega-market.sbs]как зайти на mega[/url] – площадка мега даркнет, мега даркнет зеркало
hanovgreep · January 5, 2024 at 3:40 am
Учебный центр «ВНИИС» занимается квалифицированной подготовкой для всех, кто хочет развиваться. Здесь тщательно подошли к подбору преподавателей и пригласили специалистов с достаточным опытом работы. Обучение проходит по утвержденным программам. Гарантируется приемлемая стоимость на услуги и отличные условия. ВНИИС – сайт, где собраны честные мнения клиентов. Можно оценить все плюсы и отыскать ответы на вопросы. ВНИИС – всесоюзный НИИ сертификации одним названием внушает доверие, вы останетесь довольны сотрудничеством.
HARARET · January 5, 2024 at 4:10 am
Hi, every time i used to check website posts here in the early hours in the dawn, since i
like to find out more and more.
Foxibet · January 5, 2024 at 4:19 am
Hey I am so delighted I found your blog page, I really found you by mistake, while I was browsing
on Bing for something else, Nonetheless I am here now and would
just like to say many thanks for a tremendous post and a all round enjoyable blog (I also love the theme/design), I don’t have time to look over it all at the moment but I have bookmarked it and also included your RSS feeds,
so when I have time I will be back to read much more, Please do keep up
the awesome jo.
studybay review · January 5, 2024 at 4:25 am
If you wish for to grow your know-how only keep visiting this site and
be updated with the latest news update posted here.
BernardRal · January 5, 2024 at 5:06 am
온카마켓은 카지노와 관련된 정보를 공유하고 토론하는 커뮤니티입니다. 이 커뮤니티는 다양한 주제와 토론을 통해 카지노 게임, 베팅 전략, 최신 카지노 업데이트, 게임 개발사 정보, 보너스 및 프로모션 정보 등을 제공합니다. 여기에서 다른 카지노 애호가들과 의견을 나누고 유용한 정보를 얻을 수 있습니다.
온카마켓은 회원 간의 소통과 공유를 촉진하며, 카지노와 관련된 다양한 주제에 대한 토론을 즐길 수 있는 플랫폼입니다. 또한 카지노 커뮤니티 외에도 먹튀검증 정보, 게임 전략, 최신 카지노 소식, 추천 카지노 사이트 등을 제공하여 카지노 애호가들이 안전하고 즐거운 카지노 경험을 즐길 수 있도록 도와줍니다.
온카마켓은 카지노와 관련된 정보와 소식을 한눈에 확인하고 다른 플레이어들과 소통하는 좋은 장소입니다. 카지노와 베팅에 관심이 있는 분들에게 유용한 정보와 커뮤니티를 제공하는 온카마켓을 즐겨보세요.
카지노 커뮤니티 온카마켓은 온라인 카지노와 관련된 정보를 공유하고 소통하는 커뮤니티입니다. 이 커뮤니티는 다양한 카지노 게임, 베팅 전략, 최신 업데이트, 이벤트 정보, 게임 리뷰 등 다양한 주제에 관한 토론과 정보 교류를 지원합니다.
온카마켓에서는 카지노 게임에 관심 있는 플레이어들이 모여서 자유롭게 의견을 나누고 경험을 공유할 수 있습니다. 또한, 다양한 카지노 사이트의 정보와 신뢰성을 검증하는 역할을 하며, 회원들이 안전하게 카지노 게임을 즐길 수 있도록 정보를 제공합니다.
온카마켓은 카지노 커뮤니티의 일원으로서, 카지노 게임을 즐기는 플레이어들에게 유용한 정보와 지원을 제공하고, 카지노 게임에 대한 지식을 공유하며 함께 성장하는 공간입니다. 카지노에 관심이 있는 분들에게는 유용한 커뮤니티로서 온카마켓을 소개합니다
BruceBig · January 5, 2024 at 5:24 am
lisinopril 2mg tablet: order lisinopril from mexico – price of lisinopril
StevenRed · January 5, 2024 at 5:33 am
zithromax 1000 mg pills: zithromax 500 mg for sale – zithromax 500 mg for sale
Pech_aeSa · January 5, 2024 at 5:51 am
печь камин для дачи на дровах [url=magazin-kaminov11.ru]magazin-kaminov11.ru[/url].
смотреть дорамы 2024 · January 5, 2024 at 6:11 am
Ну и кто бы мог подумать, что [url=https://doramahit.tv/doramy-novye/]новые дорамы[/url] так зацепят! Начал смотреть из любопытства, а они оказались просто захватывающими. Каждый новый сериал – это словно открытие нового мира, с его историями, героями, судьбами. И в каждом есть что-то такое, что заставляет снова и снова возвращаться к просмотру.
an cap thuong hieu · January 5, 2024 at 6:29 am
I’d like to find out more? I’d like to find out some
additional information.
xxx video 24 · January 5, 2024 at 7:01 am
xxx video 24
ovajajef · January 5, 2024 at 7:13 am
На сайте https://yardbar.ru/services/ вы сможете забронировать караоке «YARD» для того, чтобы провести здесь корпоратив, День рождения, мальчишник, девичник. При желании вы сможете арендовать весь караоке-бар. Вас ожидает профессиональное оборудование, безупречный уровень сервиса, приятная обстановка. К каждому клиенту практикуется индивидуальный подход. Изучите банкетное меню для того, чтобы выбрать что-то на свой вкус. Специально для вас действуют доступные расценки. Создавайте свое праздничное настроение, а персонал поможет вам в этом!
Davidvielt · January 5, 2024 at 7:49 am
tamoxifen buy: does tamoxifen cause menopause – common side effects of tamoxifen
javhd · January 5, 2024 at 8:26 am
I will right away seize your rss as I can’t to find your e-mail subscription link or e-newsletter service.
Do you’ve any? Please allow me realize in order that I may subscribe.
Thanks.
BobbySit · January 5, 2024 at 8:33 am
http://zithromaxbestprice.icu/# how much is zithromax 250 mg
BrandonJor · January 5, 2024 at 9:04 am
doxycycline 100mg price [url=http://doxycyclinebestprice.pro/#]doxycycline hyclate[/url] cheap doxycycline online
asiacolorfinnagt · January 5, 2024 at 9:50 am
Здесь однозначно лучшая [url=https://asiacolor.kz/]порошковая краска[/url]. Рекомендую!
emovcdeast · January 5, 2024 at 11:02 am
В этом году с уверенностью можно сказать, что выражение о быстротечной и изменчивой моде уже утратило свое значение. Ведь все чаще дизайнеры переосмысливают, обращают внимание потребителей на уже ранее известные тренды и цвета. Например, в 2023 году популярность набрал стиль barbiecore — под влиянием фильма о Барби режиссера Грети Гервиг. Однако в этом сезоне мы снова видим розовый цвет на модных показах, хоть и немного иного оттенка. Какие цвета будут в моде в 2024 году, рассказываем тебе дальше на сайте https://wowfashionable.ru/
asdxsdsainy · January 5, 2024 at 11:09 am
Салют, хочу поделится информации об росте криптовалюты, вам стоит её купить http://www.roadstrategysolutions.com/index.php?option=com_kunena&view=topic&catid=5&id=442855&Itemid=0#1227225 что бы вы смогли заработать x3
Cheap SR22 insurance · January 5, 2024 at 11:44 am
Wow, this message truly reverberated along with
me. Your viewpoint is both insightful and one-of-a-kind.
I am actually absolutely bookmarking this for potential recommendation.
Feel free to visit my web-site Cheap SR22 insurance
Benniewew · January 5, 2024 at 12:05 pm
Encountered a captivating article, I propose you read http://www.golf.od.ua/forum/viewtopic.php?p=72093&sid=72239a09abcaaf7bce2429f68ad82d34#72093
Kennethrat · January 5, 2024 at 12:06 pm
апостиль в новосибирске
ikovaNow · January 5, 2024 at 12:18 pm
ZAMOK-OK предоставляет высококачественные услуги по доступным ценам. Если вам необходим ремонт и установка замков в Калининграде, смело обращайтесь в нашу компанию, сотрудники которой экономят время своих клиентов и работают оперативно. У них имеются необходимые материалы и профессиональные инструменты. Они открывают авто в сжатые сроки и без повреждений. Ищите установка замка? Zamok-ok.ru – портал, где имеется контактная информация и блог. Вызвать мастера есть возможность в любое время. Позвоните по телефону и объясните ситуацию. Здесь быстро решат все ваши вопросы!
Davidvielt · January 5, 2024 at 1:26 pm
azithromycin zithromax: zithromax purchase online – zithromax cost
oyaTeenere · January 5, 2024 at 1:33 pm
На сайте https://soccerforma.com/ каждый желающий получает возможность приобрести футбольную форму: детскую либо взрослую и игроков своей любимой команды. Все футболки выполнены из качественных, натуральных тканей, которые износостойкие, а цветовая палитра не выцветет при солнце либо после множества стирок. Регулярно на портале появляются новинки, которые могут заинтересовать и вас. Обязательно посетите такие разделы, как: «Атрибутика», «Распродажа», где реализуется качественная и добротная форма, но по сниженной стоимости.
Evan · January 5, 2024 at 1:57 pm
Horny busty wife who wants to take in the porn are enthusiastically enjoying the sex education. The terms to describe an abuse of power where the main roles are. I’ve lost count as social constructs as gender roles or norms these are. Keep an eye roll orgasms are centered in the event you would like to be real sex. We now have real chemistry and the other stretched out we promise it doesn’t go around. Come on in and check out exclusive content from your favorite sex scenes and emotionally fulfilling. Clergymen all over while nude on the floor as a naughty sex text. Ginseng provided significant improvements while a woman’s behind is you will surely get. 15 beaches will require you might not feel good for both propagation and long-term survival. Most beaches around Maddie played by the quality and safety of people’s relationships. I love when pussy is applied in such contexts because of one partner’s infidelity is.
JamesOxync · January 5, 2024 at 1:59 pm
http://nolvadex.fun/# tamoxifen vs raloxifene
asimoCoale · January 5, 2024 at 2:51 pm
Желаете взять в аренду автомобиль? Компания CarTrip вам поможет в этом, она предложит долгосрочное сотрудничество и исключительно качественные услуги. Здесь дают гарантию на хороший сервис, большой выбор автомобилей и великолепные условия проката. Машину доставят в любое время суток очень быстро. Ищите аренда авто Краснодар минивэн? Prokat.car-trip.ru – сайт, где можно ознакомиться с многочисленными отзывами довольных клиентов. Звоните по телефону и специалисты оперативно решат все ваши вопросы. Наслаждайтесь управлением машиной вашей мечты!
News · January 5, 2024 at 2:53 pm
I read this paragraph completely regarding the comparison of
most recent and earlier technologies, it’s awesome article.
MichaFoend · January 5, 2024 at 3:22 pm
двери металлические технические помещения https://texnicheskiedveri.ru/
JamesShela · January 5, 2024 at 3:44 pm
最新的民調顯示,2024年台灣總統大選的競爭格局已逐漸明朗。根據不同來源的數據,目前民進黨的賴清德與民眾黨的柯文哲、國民黨的侯友宜正處於激烈的競爭中。
一項總統民調指出,賴清德的支持度平均約34.78%,侯友宜為29.55%,而柯文哲則為23.42%。
另一家媒體的民調顯示,賴清德的支持率為32%,侯友宜為27%,柯文哲則為21%。
台灣民意基金會的最新民調則顯示,賴清德以36.5%的支持率領先,柯文哲以29.1%緊隨其後,侯友宜則以20.4%位列第三。
綜合這些數據,可以看出賴清德在目前的民調中處於領先地位,但其他候選人的支持度也不容小覷,競爭十分激烈。這些民調結果反映了選民的當前看法,但選情仍有可能隨著選舉日的臨近而變化。
BobbySit · January 5, 2024 at 3:45 pm
http://zithromaxbestprice.icu/# zithromax 1000 mg pills
alyastabisa · January 5, 2024 at 5:28 pm
На сайте https://hondann.ru/motocikly/ предлагается к покупке мотоциклы, квадроциклы, лодочные моторы и другое с доставкой и по привлекательной стоимости. Здесь вы найдете весь спектр монотехники ведущих японских изготовителей. Профессиональный персонал поможет вам с выбором в зависимости от ваших желаний. Если вы оформите заказ и оплатите его, вам будет отправлен подарочный сертификат. Также здесь есть бонусные баллы и распродажа. Подробнее ознакомиться с товаром и отзывами вы можете уже сейчас на сайте.
Framkusest · January 5, 2024 at 5:38 pm
https://sury-iz-korana.ru/
suveniry_rmet · January 5, 2024 at 7:13 pm
челябинск сувениры из камня [url=https://suveniry-i-podarki16.ru/]https://suveniry-i-podarki16.ru/[/url].
Davidvielt · January 5, 2024 at 7:18 pm
buy cytotec online: п»їcytotec pills online – order cytotec online
asdxsdsainy · January 5, 2024 at 7:21 pm
Здравствуйте, хочу поделится информации об росте криптовалюты, вам стоит её купить http://www.rrsclub.ru/showthread.php?p=33423#post33423 что бы вы смогли заработать x3
голые девушки · January 5, 2024 at 7:46 pm
голые девушки
BruceBig · January 5, 2024 at 7:48 pm
tamoxifen breast cancer prevention: п»їdcis tamoxifen – tamoxifen breast cancer prevention
سكس xnxx · January 5, 2024 at 7:51 pm
Fantastic blog! Do you have any tips for aspiring writers?
I’m hoping to start my own site soon but I’m a little lost on everything.
Would you propose starting with a free platform like WordPress or go for a paid option? There are so many options out there that I’m completely overwhelmed
.. Any recommendations? Bless you!
BrandonJor · January 5, 2024 at 8:45 pm
lisinopril tablet 40 mg [url=http://lisinoprilbestprice.store/#]generic for prinivil[/url] can you buy lisinopril
lidiyaLab · January 5, 2024 at 9:14 pm
Необходима помощь в выборе программы 1С? Обратитесь за помощью к специалистам компании «V8SOFT», они точно вам помогут вывести бизнес на новейший уровень. Здесь гарантируют высочайшее качество обслуживания, предлагают эффективные услуги по лояльным ценам и стремятся к взаимовыгодному длительному партнерскому отношению. Ищите внедрение 1с документооборот? V8soft.ru – портал, где есть возможность ознакомиться со спецпредложениями и конфигурациями 1С. Для заказа программных продуктов, позвоните нам по телефону. Наши сотрудники уже ждут звонка от вас!
Pedroded · January 5, 2024 at 9:38 pm
[url=https://1win-bet-brasil.net]1win apk[/url]
Upload apk file BC 1win – win right now!
1win
EdwardPhano · January 5, 2024 at 9:41 pm
[url=https://mostbet-apk-uz.com]mostbet-apk-uz.com[/url]
Upload apk file online casino mostbet – win right now!
https://www.mostbet-apk-uz.com
BobbySit · January 5, 2024 at 10:51 pm
https://lisinoprilbestprice.store/# order lisinopril 20mg
StevenRed · January 5, 2024 at 11:01 pm
Cytotec 200mcg price: buy cytotec over the counter – buy cytotec pills
Prestonsteld · January 5, 2024 at 11:28 pm
Payday loans in Rhode Island
AndrewAnere · January 6, 2024 at 12:46 am
find more information [url=https://sites.google.com/view/whatsapweblogin]WhatsApp indir[/url]
Davidvielt · January 6, 2024 at 12:56 am
zestril 10 mg online: zestril tab 10mg – lisinopril cost 5mg
EdwardPhano · January 6, 2024 at 1:21 am
[url=https://mostbet-apk-uz.com]mostbet-apk-uz.com[/url]
Install application online casino mostbet – play today!
https://www.mostbet-apk-uz.com
Pedroded · January 6, 2024 at 1:21 am
[url=https://1win-bet-brasil.net]1win apk[/url]
Download latest version of the application casino 1win – win now!
1win
JamesOxync · January 6, 2024 at 3:06 am
http://nolvadex.fun/# does tamoxifen cause menopause
nasorHip · January 6, 2024 at 3:28 am
Портал wkazarin.ru расскажет вам, как необходимо внедрять бережливое производство на предприятиях России. Здесь обнародовано более 900 материалов, и количество их только растет. Вы можете в любое время посмотреть предстоящие мероприятия. Интересует картирование потоков создания ценности? Wkazarin.ru – сайт, который обрел партнеров за рубежом и в РФ. Тут собраны заметки на темы использования разных методов и инструментов бережливого производства для развития технологий. На основной странице есть последние комментарии, которые вы можете посмотреть прямо сейчас.
BobbySit · January 6, 2024 at 4:33 am
http://cytotec.icu/# cytotec online
scenicsuperior.com · January 6, 2024 at 5:31 am
I think that what you posted made a lot of sense. However, consider this, what
if you typed a catchier post title? I am not suggesting your content is not solid., however suppose you added a post title to maybe get folk’s
attention? I mean Drone Hardware & programming – Teqto System is kinda vanilla.
You should look at Yahoo’s home page and note how they create article headlines to
grab people to click. You might add a related video
or a pic or two to grab people interested about what
you’ve written. Just my opinion, it could bring your posts a little bit more interesting.
Sommer · January 6, 2024 at 5:43 am
Include a generally doesn’t fantasize about playing interactive sex games with their favorite sex positions can be. Standing sex positions can help people with vulvas to get the most out of your VR porn. To find free live porn lovers out there and Hello this is your home for free. Flash game selection will find 24 ideas for romantic seduction using rose petals. More elaborate the vaginal structures called dead end sacs and clockwise coils are you cut. Montague Peter Pan 2003 and Thirteen are known as nocturnal penile tumescence is. Clinically penile erection or penile tumescence or penile tumescence is a physiological separation. Apart from the relatively quick loss of erection are described as she receives. This traps the blood makes the penis more sensitive delays orgasm and prolongs erection. These species the glans becomes engorged and the throat could be more wrong. High school all over the protagonists could be more visible to describe masturbation. For example football or movies from across the web VR app through your Google Cardboard and more. A systematic review panel consisting of a slice-of-life movie with a real all star.
AltonCreek · January 6, 2024 at 6:30 am
[url=https://1winsbrasil.net]1win casino[/url]
Install apk file online casino 1win – win right now!
1win casino
Davidvielt · January 6, 2024 at 6:33 am
buy zithromax: zithromax 500 mg – buy generic zithromax no prescription
stasiyCab · January 6, 2024 at 7:47 am
На сайте https://ketodieto.com/ вы сможете узнать все о кетогенной диете. Цель – упростить процесс похудения, поэтому на сайте вы найдете руководство для новичков, меню на несколько дней, низкоуглеводные рецепты, полный список продуктов и множество другой полезной информации.
kvartira_ohEl · January 6, 2024 at 8:13 am
элитные жк москвы купить квартиру [url=https://nedvipro11.ru]https://nedvipro11.ru[/url].
MatthewSpeks · January 6, 2024 at 8:21 am
https://indiapharm.llc/# reputable indian online pharmacy indiapharm.llc
Erickgot · January 6, 2024 at 9:16 am
https://mexicopharm.com/# mexican online pharmacies prescription drugs mexicopharm.com
Marcofeara · January 6, 2024 at 9:23 am
canadian pharmacy world: drugs from canada – canadian pharmacy 24 com canadapharm.life
Henrygrits · January 6, 2024 at 9:56 am
mexican pharmaceuticals online [url=http://mexicopharm.com/#]mexican pharmacy[/url] pharmacies in mexico that ship to usa mexicopharm.com
Nekraspape · January 6, 2024 at 9:59 am
На сайте https://yaloshotel.ru/ можно недорого снять номер и провести время уютно и комфортно. В отеле вам будут предложены просторные номера, где есть кондиционер и бесплатный wi-fi. Здесь есть номера трех категорий. На портале имеется детальная информация о номерах, а также об отзывах посетителей. Мини-отель расположен в тихом квартале, удобная транспортировка дает возможность добраться из отеля в любую часть города. Выберите для себя номер отеля, посмотрев нашу галерею.
AltonCreek · January 6, 2024 at 10:13 am
[url=https://1winsbrasil.net]1win apk[/url]
Upload apk file online casino 1win – play today!
1win casino
xxxx · January 6, 2024 at 10:56 am
Truly when someone doesn’t understand then its
up to other users that they will help, so here it
occurs.
网络性爱 · January 6, 2024 at 11:51 am
σεξ เกาหลี
Kennethrat · January 6, 2024 at 1:37 pm
апостиль в новосибирске
DavidGut · January 6, 2024 at 2:08 pm
best online pharmacy india: India Post sending medicines to USA – indian pharmacy indiapharm.llc
uconRop · January 6, 2024 at 2:31 pm
На сайте https://yardbar.ru/services/ забронируйте столик, чтобы весело, интересно и необычно провести время в караоке-баре «YARD». Здесь можно отметить корпоратив, День рождения, мальчишник либо девичник. В этом заведении будет создана приятная, волшебная атмосфера, которая понравится каждому гостю. Вас обрадуют привлекательные расценки, а также огромный выбор блюд, приготовленных из самых разных продуктов. При желании вы сможете взять в аренду караоке-бар, где вас обрадует богатый выбор песен на любой вкус.
Marcofeara · January 6, 2024 at 2:50 pm
mail order pharmacy india: Online India pharmacy – п»їlegitimate online pharmacies india indiapharm.llc
JamesMoura · January 6, 2024 at 3:21 pm
Discovered an interesting article, I suggest you familiarize yourself http://t67747az.beget.tech/2024/01/05/vip-modeli-i-soderzhanki-v-moskve.html
ershopoone · January 6, 2024 at 3:25 pm
Надежный обменник SOVA пользуется большой популярностью. Здесь возможно выгодно купить либо продать необходимую вам валюту и даже поучаствовать в конкурсе. Денежные средства приходят быстро, курс очень выгодный, можете убедиться в этом лично. Поддержка работает круглосуточно, быстро обрабатывают заявки. Вы останетесь довольны скоростью и качеством. Ищите sova gg? Sova.exchange – обменник, где можно найти ответы на интересующие вопросы. Тут имеется контактная информация и новости. Можно в любое время ознакомиться с правилами обмена.
Erickgot · January 6, 2024 at 5:19 pm
https://canadapharm.life/# canadian pharmacy review canadapharm.life
Henrygrits · January 6, 2024 at 11:46 pm
best online pharmacies in mexico [url=http://mexicopharm.com/#]Purple Pharmacy online ordering[/url] mexican drugstore online mexicopharm.com
oekatFluic · January 7, 2024 at 8:08 am
На сайте https://www.avtogalaktika.com/ ознакомьтесь с телефоном компании, в которой можно приобрести автомобили из Европы и Америки. Многие из них имеются в наличии, а некоторые можно приобрести только под заказ. В компании можно воспользоваться такими услугами, как: деньги под залог авто, наличные под залог, займ под ПТС и многими другими. Откройте раздел с автомобилями, которые сейчас имеются в продаже. Если остались вопросы, вам необходимо что-то уточнить, то оставьте заявку. Для этого заполните форму на сайте.
Dominick · January 7, 2024 at 1:10 pm
Awesome write ups, Cheers.
My blog: https://gtahouserenovationvaughanerica.blogpixi.com
Henrygrits · January 7, 2024 at 5:34 pm
canada drugs reviews [url=http://canadapharm.life/#]Canada Drugs Direct[/url] canadapharmacyonline com canadapharm.life
luckyjet 1win · January 8, 2024 at 5:56 am
Креативная игра Лаки Джет на деньги не оставит тебя равнодушным – жми на газ и уничтожай границы своей удачи! Лаки Джет – оригинальная игра, которая перенесет тебя в мир азарта и высоких ставок.
CharlesZic · January 8, 2024 at 8:58 am
http://edpillsdelivery.pro/# erectile dysfunction medication
Charlesneusy · January 8, 2024 at 9:53 am
buy tadalafil uk [url=https://tadalafildelivery.pro/#]india pharmacy online tadalafil[/url] tadalafil tablets 20 mg buy
moilovSem · January 8, 2024 at 11:56 am
Ищите как можно заболеть? Известный портал, на котором рассматриваются ключевые вопросы, рекомендует ознакомиться с честными новостями, касающимися разных областей. Есть информация о популярных блогерах. Проверить то, какой у вас интеллект, можно при помощи несложного теста, возможно, вы наберете максимальное количество баллов. На сайте info-box24.ru – есть различные интересные викторины, материал о том, какой праздник отмечают сегодня. Постоянно публикуется новый контент на разную тему. Если болеете за свою страну всей душой, то необходимо изучить изображения на тему Дня Конституции.
1Winwinsitefinnagt · January 8, 2024 at 12:41 pm
Всем советую оригинальный сайт БК [url=https://1win-1win.net/]1Win[/url]. Рекомендую однозначно!
Matthewmef · January 9, 2024 at 2:22 am
buy kamagra online usa: cheap kamagra – Kamagra Oral Jelly
monovNup · January 9, 2024 at 4:35 pm
На сайте https://zamok-ok.ru/ustanovka/ предлагается услуга по установке замков в кратчайшие сроки и по лояльной цене. Автомобили открываем быстро и без повреждений. Работаем 24/7, выезжаем в любое время суток. Длительный опыт работы позволяет мастерам браться за любые случаи. Оперативно решаем вопросы, вам лишь стоит просто позвонить, объяснить тип поломки и непосредственно вашу ситуацию, и квалифицированные мастера приедут к вам в ближайшее время. Качество работы гарантируется!
Jamesbum · January 9, 2024 at 10:09 pm
[url=https://1wins.com.br]1win[/url]
anal porno
1win
asovaHep · January 10, 2024 at 2:15 am
На сайте https://fliptok.app/ru вы сможете скачать Тик Ток видео в безупречном качестве и высоком разрешении. Все, что для этого нужно – просто вставить ссылку, после чего скачать видео. Это уникальное и инновационное приложение позволяет общаться с друзьями, рассказать свою историю и даже монетизировать хобби. Выбирайте ролик, после чего скопируйте ссылку на видео, а затем скачайте видео. Все максимально просто. Загрузка не вызовет трудностей ни у ребенка, ни у взрослого. При этом нет необходимости скачивать какие-либо приложения или другой софт.
Enriqueopita · January 10, 2024 at 11:11 am
https://paxlovid.guru/# paxlovid pill
Davidhoure · January 10, 2024 at 1:41 pm
paxlovid pill [url=http://paxlovid.guru/#]Paxlovid buy online[/url] Paxlovid over the counter
vatamRouro · January 10, 2024 at 1:48 pm
На сайте https://pearl-orel.ru/ ознакомьтесь с турами и бронируйте отели. Вы можете прямо сейчас выбрать, куда хотите поехать отдохнуть. Купить тур проще простого, выберите направление и забронируйте онлайн. Заполните данные и оплатите. Если у вас возникнут какие-либо трудности в подборе туров, напишите на сайт, профессионалы бесплатно подберут для вас оптимальный вариант, который подходит именно вам. Здесь только самые выгодные предложения, гибкая ценовая политика и удобный сервис.
discover this · January 10, 2024 at 2:43 pm
This piece of writing offers clear idea for the new people of blogging, that really how to do blogging and site-building.
DavidIntom · January 11, 2024 at 12:56 am
uniswap https://uniswap.work/
Davidnip · January 11, 2024 at 2:18 am
Found an enthralling article, I recommend you to read http://pytalovo.4admins.ru/viewtopic.php?f=15&t=1984
edotoDex · January 11, 2024 at 12:16 pm
На сайте https://game24.space/ вы найдете самую большую коллекцию фото и картинок на самые разнообразные тематики, а также красивые фоны и обои для рабочего стола компьютера и смартфона. Просто выберете категорию, и вы обязательно найдете для себя необходимое.
prodvizhenie_ljKl · January 11, 2024 at 7:27 pm
сео заказать [url=prodvizhenie-sajtov15.ru]prodvizhenie-sajtov15.ru[/url].
Gregginfup · January 11, 2024 at 10:26 pm
where to buy cheap clomid without insurance: Buy Clomid online – where can i get generic clomid pills
novaarit · January 11, 2024 at 10:54 pm
На сайте https://lechenie-alkogolizma-anonimno.ru/ вы найдете эффективные и новейшие средства от алкоголизма. Здесь представлено сравнение более популярных и востребованных медицинских препаратов и альтернативных методов борьбы. Если вы безуспешно боролись с пьянством близкого человека либо своим, то вы в необходимом месте. Заполните форму на сайте и получите бесплатную консультацию о том, как избавиться от алкоголизма навсегда. Специалист позвонит и выберет для вас необходимый способ борьбы.
Borisjet · January 12, 2024 at 10:10 am
La MsBooks https://msbooks.club/ ne propunem să vă oferim conținut valoros și captivant. Fiecare carte este selectată cu atenție, oferindu-vă o experiență de lectură memorabilă, de la clasicii literaturii mondiale până la cele mai recente tendințe în ficțiune contemporană.
ivistroy.ru · January 12, 2024 at 4:00 pm
What’s up Dear, are you really visiting this web site daily, if so then you will absolutely get pleasant experience.
Bernardvew · January 12, 2024 at 8:21 pm
Мейзу Клуб ([url=https://mymeizuclub.ru/]https://mymeizuclub.ru/[/url]) – это всеобъемлющий ресурс, ориентированный на различных сторонах продуктов Meizu. На сайте представлены различные категории, содержащие смартфоны, наушники, фитнес-браслеты и разнообразную умной техники. Пользователи могут разыскать подробные руководства и советы по использованию устройств Meizu, включая обновление системы, оптимизацию производительности, установку сервисов Google Play и множество других возможностей. Сайт также помогает с помощью в решении проблем, относящихся к устройствам Meizu, и гарантирует поддержку пользователей.
На Мейзу Клубе вы найдете обширные обзоры о новейших моделях смартфонов Meizu. Эти статьи предоставят вам полное представление технических характеристик и преимуществ каждой модели.
Сайт также включает специализированные форумы, где вы можете поделиться своим опытом и задать вопросы о устройствах Meizu. Это идеальное место для общения с другими пользователями.
Раздел FAQ на mymeizuclub.ru предлагает незаменимым источником информации для быстрого решения распространенные вопросы, связанные с продуктами Meizu.
Регулярно обновляемые новости и анонсы о последних обновлениях от Meizu помогут вам оставаться в курсе о инновациях компании и технологических достижениях.
Кроме того, раздел полезных советов на сайте раскроет потенциал ваших устройств Meizu, предлагая практические рекомендации по улучшению их работы.
Не забудьте добавить наш сайт в закладки: https://mymeizuclub.ru/
ArthuWet · January 12, 2024 at 9:39 pm
pin up ставки https://pinupbets.kz/
daa4a.ru · January 13, 2024 at 11:53 am
When someone writes an post he/she keeps the plan of a user in his/her mind that how a user can understand it. Thus that’s why this post is great. Thanks!
RobertliElo · January 13, 2024 at 5:22 pm
get cheap propecia without dr prescription [url=http://finasteride.men/#]Buy finasteride 1mg[/url] get generic propecia online
daa4a.ru · January 13, 2024 at 8:41 pm
Howdy! I realize this is somewhat off-topic but I had to ask. Does building a well-established blog like yours take a lot of work? I’m completely new to blogging but I do write in my diary on a daily basis. I’d like to start a blog so I can share my experience and thoughts online. Please let me know if you have any ideas or tips for new aspiring bloggers. Appreciate it!
Все займы · January 14, 2024 at 12:02 pm
Стиральная машина сломалась, и моя жизнь стала намного менее комфортной. Я начал искать способы замены её, но бюджет был ограничен. В одной из групп в социальной сети я наткнулся на рекламу сайта, где представлен огромный список новых МФО 2024 года. С помощью этого сайта, мне удалось получить займ моментально и купить новую стиральную машину. Теперь моя бытовая жизнь стала намного удобнее.
[url=https://msk-zaim.ru/]Займы наличными – удобное решение для финансовых потребностей[/url]
yurist_wzSr · January 15, 2024 at 3:48 am
Юридическая защита от неправомерного взыскания алиментов
сколько стоят услуги адвоката алиментам [url=http://www.yurist-po-alimentam-v-moskve.ru/]http://www.yurist-po-alimentam-v-moskve.ru/[/url].
Michaeljiz · January 15, 2024 at 4:08 am
каталог https://sexpornotales.me/izmena/1167-nachalnica-v-chulkah.html
ataliybeP · January 15, 2024 at 4:10 am
Зайдите на сайт https://na-dache.pro/ где вы увидите фото на тему: декор дачи и гаража, фото кухни и мансарды, дизайн интерьеров и ландшафтный дизайн, фото дома, бани, беседок, фото заборов и ограждений. Коллекция постоянно пополняется, и вы обязательно найдете необходимые, готовые для себя варианты.
MichaelCoept · January 15, 2024 at 5:28 pm
farmacie on line spedizione gratuita: avanafil generico prezzo – comprare farmaci online all’estero
Robertokic · January 15, 2024 at 8:13 pm
http://sildenafilitalia.men/# viagra pfizer 25mg prezzo
daa4a.ru · January 16, 2024 at 4:56 am
This is a topic that is close to my heart… Take care! Where are your contact details though?
daa4a.ru · January 16, 2024 at 6:13 am
Hi, just wanted to mention, I liked this article. It was practical. Keep on posting!
eksanFrend · January 16, 2024 at 9:37 am
На сайте https://vsegda-pomnim.com/ вы найдете огромную коллекцию фотографий различной направленности, которые сможете посмотреть или скачать. У нас есть все фото: религия, природа, моря и океаны, заповедники, ягоды и фрукты, пейзажи и многое другое. Просто выберете рубрику и смотрите. Коллекция постоянно пополняется.
ivistroy.ru · January 16, 2024 at 2:19 pm
If you are going for best contents like me, only visit this web site daily because it offers quality contents, thanks
CharlesNah · January 16, 2024 at 6:00 pm
[url=https://roaayadesign.com]Pin up download[/url]
best anal porno
Pin up casino
sayty_xdKt · January 16, 2024 at 8:51 pm
продвижение сайтов seo [url=http://www.seo-live.com/novosti-rinka/chto-delat-esli-vi-popalis-na-udochku-moshennikov-v-seti/]http://www.seo-live.com/novosti-rinka/chto-delat-esli-vi-popalis-na-udochku-moshennikov-v-seti/[/url].
ordeeElish · January 16, 2024 at 9:02 pm
Сайт http://klublady.ru/ это коллекция красивых фото. Кликните необходимую рубрику и просматривайте или скачайте фото на тему тату, свадьба, макияж, кулинария, маникюр, прически и стрижки и многое другое. Рубрики постоянно пополняются новыми фото.
JaimeSpoca · January 17, 2024 at 9:36 am
buying prescription drugs in mexico online: mexico pharmacies prescription drugs – mexican drugstore online
nakomimmat · January 17, 2024 at 1:53 pm
На сайте https://krasnodar-transport.ru/ оформите заявку для того, чтобы воспользоваться услугой аренды автобуса с водителем. Компания также предлагает заказать и автомобили различного сегмента, минивэны, микроавтобусы. Все транспортные средства находятся в исправном состоянии, а потому никогда не подведут в самый неподходящий момент. «Открытый Краснодар» организует только безопасные, качественные перевозки. Специально для вас доступны такие услуги, как: экскурсии, трансфер, перевозка детей, перевозка гостей на свадьбе.
1WinnwinBKfinnagt · January 17, 2024 at 4:51 pm
Лучший оригинальный сайт [url=https://1win2.net/]1Win[/url] в России. Рекомендую!
JasonFap · January 18, 2024 at 3:35 am
[url=https://eth-etf.net]when eth etf[/url] – how to buy ethereum etf, how to buy ethetf
BernardRal · January 18, 2024 at 5:20 am
娛樂城
2024娛樂城的創新趨勢
隨著2024年的到來,娛樂城業界正經歷著一場革命性的變遷。這一年,娛樂城不僅僅是賭博和娛樂的代名詞,更成為了科技創新和用戶體驗的集大成者。
首先,2024年的娛樂城極大地融合了最新的技術。增強現實(AR)和虛擬現實(VR)技術的引入,為玩家提供了沉浸式的賭博體驗。這種全新的遊戲方式不僅帶來視覺上的震撼,還為玩家創造了一種置身於真實賭場的感覺,而實際上他們可能只是坐在家中的沙發上。
其次,人工智能(AI)在娛樂城中的應用也達到了新高度。AI技術不僅用於增強遊戲的公平性和透明度,還在個性化玩家體驗方面發揮著重要作用。從個性化遊戲推薦到智能客服,AI的應用使得娛樂城更能滿足玩家的個別需求。
此外,線上娛樂城的安全性和隱私保護也獲得了顯著加強。隨著技術的進步,更加先進的加密技術和安全措施被用來保護玩家的資料和交易,從而確保一個安全可靠的遊戲環境。
2024年的娛樂城還強調負責任的賭博。許多平台採用了各種工具和資源來幫助玩家控制他們的賭博行為,如設置賭注限制、自我排除措施等,體現了對可持續賭博的承諾。
總之,2024年的娛樂城呈現出一個高度融合了技術、安全和負責任賭博的行業新面貌,為玩家提供了前所未有的娛樂體驗。隨著這些趨勢的持續發展,我們可以預見,娛樂城將不斷地創新和進步,為玩家帶來更多精彩和安全的娛樂選擇。
alimentam_miSt · January 18, 2024 at 5:47 am
юридическая консультация по алиментам [url=https://yurist-konsultaciya-msk1.ru/yurist-po-alimentam]юрист онлайн по алиментам[/url].
JaimeSpoca · January 18, 2024 at 6:45 am
pharmacy website india: п»їlegitimate online pharmacies india – top 10 online pharmacy in india
Charlesgox · January 18, 2024 at 6:54 am
maple leaf pharmacy in canada [url=https://canadapharm.shop/#]canadian drugstore online[/url] pharmacies in canada that ship to the us
Jameswem · January 18, 2024 at 7:29 am
https://canadapharm.shop/# canadianpharmacymeds
Greggcot · January 18, 2024 at 8:10 am
[url=https://eth-etf.net]when eth etf[/url] – ethereum etf, eth etf news
Jameswem · January 18, 2024 at 12:57 pm
http://canadapharm.shop/# canadian pharmacy no rx needed
iryukBum · January 18, 2024 at 7:07 pm
На сайте https://xn—-xtbgfj7e.xn--p1ai/ изучите весь ассортимент красок, обоев, напольных покрытий, различные варианты лепнины, декоративной штукатурки. Здесь же получится заказать и сопутствующие услуги. К примеру, поклейку обоев, малярные работы, укладку пола и многое другое. Специально для вас в компании подберут решение конкретно под ваш бюджет. Предоставляются все гарантии качества. Все сроки выполнения работ тщательно соблюдаются, а потому заказчика никогда не подводят. Работы выполняются на профессиональном уровне.
ordsdTox · January 19, 2024 at 1:05 am
https://zh-cam.com/ 這個 現在在線的世界網絡攝像機將實時向你展示所有的樂趣。
Edgardolab · January 19, 2024 at 2:50 am
[url=http://fgt6swswecjpnoxqky5sowfauzgeka7upiukheiuts6iqrkzwtmkq5ad.onion/]youth at the bottom of the box[/url] – Content, anonymity, security, exclusivity, Content, anonymity, security, exclusivity
1winwinwwfinnagt · January 20, 2024 at 4:10 am
Это официальный сайт БК [url=https://1win3.org/]1Win[/url]. Рекомендую!
RonaldEmope · January 20, 2024 at 5:28 pm
[url=https://bs2tor2.gl]Блэкспрут[/url] – blacksprut darknet сайт, ссылка на блэкспрут
interior decoration near me · January 21, 2024 at 8:14 pm
Greetings! Very useful advice within this article! It is the little changes that make the most significant changes. Thanks a lot for sharing!
fence cleaning · January 22, 2024 at 12:36 pm
Everything is very open with a really clear description of the issues. It was really informative. Your website is extremely helpful. Thank you for sharing!
atyuniErela · January 23, 2024 at 2:45 am
На странице https://easypayments.online/bank-accounts/cards вы сможете ознакомиться с тем, как открыть иностранную банковскую карту для граждан России, а также получить консультацию как это сделать. Получить именную дебетовую карту зарубежного банка в короткие сроки без необходимости ехать за границу можно у нас на сайте. Зайдите на сайт и ознакомьтесь с ценами, условиями, требованиями.
cheap car insurance · January 23, 2024 at 3:28 am
I really like your blog.. very nice colors &
theme. Did you create this website yourself or did
you hire someone to do it for you? Plz reply as I’m looking to
construct my own blog and would like to know where u got this
from. thanks
her explanation · January 23, 2024 at 5:00 am
My spouse and I absolutely love your blog and find the majority of your post’s to be just what I’m looking for. Would you offer guest writers to write content to suit your needs? I wouldn’t mind composing a post or elaborating on many of the subjects you write related to here. Again, awesome weblog!
ksandjaibe · January 24, 2024 at 4:44 am
«Центр разрешения корпоративных споров и конфликтов» предлагает свои профессиональные услуги. Каждое дело ведется опытными, квалифицированными, знающими юристами, экспертами и аудиторами, которые детально знают свою работу, успешно разрешили огромное количество сложных дел. В компании вы сможете воспользоваться такой услугой, как защита учредителя во время корпоративного спора. Компетентные сотрудники выявят факт воровства либо мошенничества. В обязательном порядке будет восстановлен контроль над вашей компанией. Если вина участника сообщества будет доказана, то он будет исключен из него. На сайте https://korporativnye-spory.ru/ посмотрите, какими услугами вы можете воспользоваться.
appliance repair service · January 24, 2024 at 9:50 am
If some one wants expert view regarding running a blog then i advise him/her to visit
this web site, Keep up the pleasant job.
TerryDoump · January 24, 2024 at 10:14 am
https://xn—–7kccgclceaf3d0apdeeefre0dt2w.xn--p1ai/
Charleswrill · January 24, 2024 at 1:46 pm
best online pharmacy india: online pharmacy india – buy medicines online in india indianpharmacy.shop
adaevved · January 24, 2024 at 4:37 pm
На сайте https://taker3.xyz сыграйте в интересные игры, которые поднимут вам настроение, а еще и помогут заработать неплохую сумму денег. Перед вами огромное количество развлечений, включая: Mines, Dice, Bubbles. Но для того, чтобы заработать побольше средств, следует использовать хитрые тактики, а также стратегии. Онлайн-площадка радует щедрой бонусной системой, а также возможностью заработать при помощи партнерской программы. Нет необходимости регистрироваться, ведь авторизация происходит через социальную сеть.
diwodEffof · January 25, 2024 at 4:56 pm
На сайте https://taker.blog сыграйте в интересные и увлекательные игры, которые помогут вам развлечься, получить порцию приятных эмоций, а заодно и заработать неплохие деньги. Уникальностью площадки является то, что она обладает щедрой бонусной системой, дает возможность неплохо заработать через партнерскую программу, что позволит получить еще 15% от вложений рефералов. Каждый день вы будете получать до 100 рублей в качестве бонуса. Имеется раздел с новогодними, новыми, а также самыми популярными играми, которые принесут неплохой доход.
apple iphone 15 pro купить минск · January 25, 2024 at 10:26 pm
What’s up to every one, as I am truly keen of reading this weblog’s post to be updated regularly. It contains pleasant data.
vekaslog · January 26, 2024 at 7:57 am
Сайт https://baraholka-express.kz/ представляет собой уникальную и инновационную платформу с продвинутой логистикой. Здесь вы сможете заказать полный комплекс услуг, включая: прием товаров с гарантированным сохранением качества. Для каждого клиента доступно ответственное хранение, что гарантирует сохранность товара, пока он находится на складе. Каждая стадия обработки заказов контролируется до момента отгрузки продукции на склад маркетплейса. Особенностью площадки является то, что она гарантирует защиту сделки обеих сторон: покупателей, поставщиков.
how long does it take for alpha tonic to work · January 26, 2024 at 11:48 pm
Hey! This is my 1st comment here so I just wanted to give a quick shout out
and say I truly enjoy reading your posts. Can you recommend any other blogs/websites/forums that deal with the same topics?
Thank you!
VictorOwedy · January 27, 2024 at 3:19 pm
pharmacie ouverte: Levitra pharmacie en ligne – Pharmacie en ligne fiable
naPahSix · January 27, 2024 at 3:19 pm
На сайте https://demo-1c.ru/ закажите консультацию, чтобы узнать больше информации об облачном сервисе. В компании работают исключительно высококлассные профессионалы, которые отлично знакомы с особенностями своей работы. Каждый желающий получает возможность ознакомиться с информационным продуктом перед покупкой либо арендой. Есть возможность воспользоваться арендой 1С в облаке. Этот момент позволит существенно сэкономить, но не во вред качеству. Работа происходит при помощи удаленного приложения.
Cartersteld · January 28, 2024 at 2:49 am
credito 400 euros
VictorOwedy · January 28, 2024 at 3:17 am
Pharmacie en ligne France: Medicaments en ligne livres en 24h – Acheter mГ©dicaments sans ordonnance sur internet
postabank.ru кредит без залога · January 28, 2024 at 3:35 am
Наша годовщина была впереди, и я хотел порадовать девушку чем-то особенным. Узнав, что ей нравится определенная модель телефона, я взял [url=https://postabank.ru/]займ на карту[/url] и сделал приятный сюрприз. Она была в восторге!
JerryCoisp · January 28, 2024 at 6:15 am
http://cialissansordonnance.shop/# acheter medicament a l etranger sans ordonnance
JerryCoisp · January 28, 2024 at 7:33 pm
http://levitrasansordonnance.pro/# pharmacie en ligne
JerryCoisp · January 29, 2024 at 2:01 am
https://pharmadoc.pro/# acheter medicament a l etranger sans ordonnance
Aaronhieva · January 29, 2024 at 8:48 am
can i purchase cheap clomid without a prescription: can you get clomid without dr prescription – clomid tablet
Andrewrex · January 29, 2024 at 9:50 am
https://prednisonetablets.shop/# prednisone tablets canada
rsanojam · January 29, 2024 at 2:58 pm
Вы в поисках лучшего онлайн-казино? Обратите внимание на Taker. Вход выполняется через соц.сеть Вконтакте, регистрацию не нужно проходить. У Такер есть множество поклонников, они охотно делятся доброжелательными отзывами. Ищите taker? Taker9.xyz – это продуманный сайт, который адаптирован под любые устройства. Вам точно не придется скучать, поскольку онлайн-казино имеет большой игровой каталог. Здесь есть все для посетителей: поддержка дружеская, выплаты оперативные. На портале вы выиграете реальные деньги, играйте!
Aaronhieva · January 29, 2024 at 3:38 pm
order prednisone 10 mg tablet: prednisone over the counter uk – prednisone 475
miladjbar · January 29, 2024 at 4:29 pm
На сайте http://www.tribal-tattoo.ru узнайте телефон тату-салона «TRIBAL TATTOO», где выполняют различные виды татуировок, перманентный макияж губ, бровей, век. К вашим услугам профессиональное создание индивидуальных эскизов. В салоне работают высококлассные, опытные специалисты с огромным стажем и творческим потенциалом. И самое важное, что вы получите именно тот результат, который и хотели. Здесь выполнят тату или татуаж в любом стиле и независимо от сложности. Любая идея будет реализована.
Olivermon · January 29, 2024 at 5:03 pm
buy prednisone 5mg canada [url=http://prednisonetablets.shop/#]can i buy prednisone from canada without a script[/url] 20mg prednisone
nwodssoN · January 29, 2024 at 5:24 pm
На сайте https://doka-stroi.ru оставьте заявку для того, чтобы воспользоваться профессиональными услугами, связанными с ремонтом квартир. Для того чтобы узнать, как работает компания, изучите проекты, подготовленные для других клиентов. Также в компании вы получаете возможность заказать и качественный черновой ремонт. В компании работают компетентные, знающие специалисты, которые выполнят работы в соответствии с нормативами, ГОСТом. Все работы проводятся в минимальные сроки. Заказать расчет вы сможете прямо сейчас.
Chrislealt · January 29, 2024 at 5:24 pm
buy cheap generic zithromax: zithromax price canada – can you buy zithromax over the counter
isovsterary · January 29, 2024 at 5:27 pm
Здоровая семья Сибирь – компания, которая изготавливает только натуральные продукты, приобрести их можете по приемлемой стоимости. Ищите лосьоны косметические? В электронном каталоге имеются масла, бальзамы, пудинги, экстракты и другое. Здесь постоянно расширяют ассортимент новинками, заботятся о клиентах и всегда прислушиваются к их желаниям. zss22.com – сайт, где есть возможность увидеть всю линейку продукции. Наличие сертификатов подтверждает качество. Делайте полезные и выгодные приобретения уже сейчас!
Andrewrex · January 29, 2024 at 5:35 pm
https://prednisonetablets.shop/# 10 mg prednisone
pirumvom · January 29, 2024 at 6:05 pm
ResumeHead https://resumehead.com/ is a resume writing company that offers services such as resume writing, cover letter writing, LinkedIn profile optimization, and career coaching. Our certified resume writers have extensive knowledge and experience in various fields and industries. We can help you create a resume that showcases your unique value proposition. Contact us today to get ahead in your career!
gainuhar · January 29, 2024 at 6:57 pm
Сайт https://hdvideoboks.store/ это фильмы, сериалы, мультфильмы, аниме в отличном качестве. Вы можете смотреть все онлайн без регистрации. Новинки кино и прочих жанров за 2024 год и ТОПы за прошлые годы. Коллекция контента ежедневно пополняется, что даст возможность каждый день смотреть новое.
Christa · January 29, 2024 at 8:17 pm
%%
my site – https://www.tnh1.com.br/conteudo/noticia/nid/maximizando-ganhos-com-1win/
xxx · January 29, 2024 at 9:53 pm
Sweet blog! I found it while surfing around on Yahoo News.
Do you have any tips on how to get listed in Yahoo News?
I’ve been trying for a while but I never seem to get there!
Thanks
Aaronhieva · January 29, 2024 at 10:28 pm
buy zithromax online australia: zithromax 250mg – zithromax 250 mg
Nikolaev_kcKt · January 29, 2024 at 10:31 pm
Nikolaev [url=http://www.natureworldnews.com/articles/57820/20230802/vyacheslav-konstantinovich-nikolaev.htm]http://www.natureworldnews.com/articles/57820/20230802/vyacheslav-konstantinovich-nikolaev.htm[/url]
Jamesknina · January 29, 2024 at 11:49 pm
https://ivermectin.store/# ivermectin cream cost
Walterdub · January 30, 2024 at 12:37 am
Stumbled upon a captivating article – definitely take a look! http://comedyforme.ru
Stiri Bucuresti · January 30, 2024 at 12:55 am
Thank you for sharing your thoughts. I truly
appreciate your efforts and I will be waiting for your
further write ups thanks once again.
Olivermon · January 30, 2024 at 12:57 am
ivermectin 3 [url=http://ivermectin.store/#]stromectol xl[/url] stromectol pills
Andrewrex · January 30, 2024 at 1:04 am
http://clomiphene.icu/# order cheap clomid without a prescription
Haliamor · January 30, 2024 at 1:22 am
Regards! Awesome stuff!
is the bc lions game on tv bc game crash bc game deposit
sckovnum · January 30, 2024 at 2:35 am
Сайт «Медицина и здоровье» подробно расскажет о том, как быстро выздороветь. Здесь представлены проверенные рецепты приготовления лечебных отваров и полезные советы по разрешению конфликтов между супругами и детьми. Ищите внутренний эндометриоз матки? Medicynanaroda.ru – популярный сайт, где есть возможность узнать секреты здоровья и красоты. Тут подробно объясняют, как отлично выглядеть. Помогут достичь внутренней гармонии и радоваться прекрасной жизни. Читайте прямо сейчас статьи, выполняйте рекомендации, чтобы себя лучше чувствовать, стать подтянутее и стройнее!
oriumnut · January 30, 2024 at 4:19 am
Пленительная http://plenitelnaya.ru/— это онлайн-журнал о красоте, моде, отношениях мужчины и женщины. Наши читательницы — позитивные, стильные, уверенные в себе, с прекрасным чувством юмора и открытые всему новому. Ежедневно мы публикуем статьи о комплексном подходе к ведению здорового образа жизни, поддержании себя в отличной форме. Вы найдете множество материалов от профессионалов в области косметологии и здоровья, практические рекомендации. Мы сотрудничаем с ведущими экспертами бьюти-отрасли, диетологами и тренерами.
taafajat · January 30, 2024 at 4:51 am
Сайт https://t.me/s/bettery_russia представляет собой канал букмекерской конторы «BETTERY», где вы узнаете самые последние новости, актуальные данные об этой компании. Здесь выкладываются не только свежие новости, но и промокоды, которые помогут сэкономить собственные деньги. Публикуется счет пришедшей игры, а также ее обзор. Обязательно подписывайтесь на канал для того, чтобы первым узнавать все самые обсуждаемые события и акции. На сайте также выкладываются любопытные видеоматериалы на данную тематику.
Aaronhieva · January 30, 2024 at 5:25 am
ivermectin 0.5 lotion india: stromectol online pharmacy – buy oral ivermectin
adamdSaith · January 30, 2024 at 5:48 am
На сайте https://l2-top.ru/ вы увидите анонсы серверов Lineage 2 и найти сервер Л2. Много игровых серверов Lineage 2 где вы легко сможете подобрать себе подходящий интересный сервер и начать играть в любимую Линейдж 2! MMORPG Линейдж 2. Ещё на нашем сайте есть раздел с эмблемами клана, клановыми значками, где можно примерить и скачать значки для кланов и альянсов!
himneBef · January 30, 2024 at 6:40 am
На сайте https://dmv-test-ru.com/ вы сможете получить практику в прохождении DMV тестов на русском языке и пошаговую инструкцию о том, как получить водительские права в вашем штате США. Изучите правила дорожного движения США для разных штатов. Бесплатный и Premium доступ. Тесты на водительские права в США на русском языке это удобная возможность изучить правила дорожного движения.
SteveBef · January 30, 2024 at 6:42 am
canadatc.com
eananHon · January 30, 2024 at 7:40 pm
На сайте https://rasteniya-vsem.ru/ вы сможете приобрести саженцы различных растений, включая и плодовые, роз, цитрусовых, субтропические, декоративные. Обязательно посетите популярную категорию, куда заходит большинство покупателей. Перед вами огромное количество товаров, которые вызовут огромный интерес у дачников, садоводов-любителей, желающих обустроить свой участок. Все саженцы легко приживаются даже в сложных погодных условиях. Обязательно зайдите в раздел, где находятся хиты продаж. Регулярно появляются новинки, которые украсят ваш сад.
JasonUriff · January 31, 2024 at 1:21 am
Came across a unique article – it’s worth your attention http://dachaweek.ru
TimothyGaugs · February 1, 2024 at 8:31 pm
Online medicine home delivery [url=https://indianpharm.store/#]order medicine from india to usa[/url] pharmacy website india indianpharm.store
yurist_xfmt · February 1, 2024 at 9:03 pm
Защитите себя и свой бизнес с помощью онлайн юриста
грабеж защита адвоката [url=https://yurist-in-onlajn.ru/advokat-po-grabezhu/]https://yurist-in-onlajn.ru/advokat-po-grabezhu/[/url].
HaroldBloox · February 2, 2024 at 2:56 am
thespice.net
Nelsonpaura · February 2, 2024 at 9:13 am
Discovered an article that might interest you Р don’t miss it! https://www.as7abe.com/wall/blogs/post/33375
Gerardvaw · February 2, 2024 at 3:01 pm
https://prodvizhenietargeting.ru/
sostuMax · February 2, 2024 at 8:02 pm
На сайте https://zonacasino.fun ознакомьтесь с бездепозитными бонусами казино. Здесь также есть и актуальные промокоды казино. Изучите весь рейтинг онлайн-заведений, которые предлагают бездепозитный бонус. Воспользоваться им вы сможете прямо сейчас или в любое другое комфортное время. Это ваша возможность не тратить собственные сбережения, а воспользоваться щедрым презентом. Важным моментом является то, что рейтинг является честным и основывается на отзывах пользователей. Бездепозитные бонусы уникальны тем, что для их получения не нужно пополнять баланс.
Charlesdah · February 3, 2024 at 3:44 am
cheapest online pharmacy india: order medicine from india to usa – top 10 pharmacies in india indianpharm.store
lchitsObent · February 3, 2024 at 7:37 am
Создайте свое профессиональное резюме с РезюмеПро https://rezumepro.com/ где мы составим ваше резюме в точном соответствии с желаемой позицией и отраслью. Резюме оптимизировано для онлайн поиска со стороны работодателей. Работайте напрямую с вашим персональным экспертом при составлении резюме. Наши эксперты по созданию резюме сэкономят ваше время на подготовку профессионального резюме. Дополните свое резюме сопроводительным письмом, чтобы сделать ваше заявление более подходящим для работодателей. Начните получать больше приглашений на собеседования с резюме от РезюмеПро.
Jerryupses · February 3, 2024 at 8:03 am
https://indianpharm.store/# reputable indian pharmacies indianpharm.store
AngelDeArP · February 3, 2024 at 9:28 am
teplica-parnik.net
p_n_xlpl · February 3, 2024 at 10:51 pm
пін ап
ігрові автомати на гроші [url=https://pinupcasinolfsesn.kiev.ua]https://pinupcasinolfsesn.kiev.ua[/url].
ulyaacreli · February 3, 2024 at 11:41 pm
Хотите скачать узбекские песни или слушать совершенно бесплатно? Muznavo то, что вам нужно. Здесь вы легко найдете казахские, таджикские и турецкие песни. https://muznavo.net/load/uzbek_mp3/1 – популярный сайт для скачивания музыкальных композиций по высшему качеству. Количество исполнителей впечатляет, прослушивать композиции можно свободно. Тут вы найдете удобный поиск, которым можно в любое время воспользоваться. Все новые треки собраны в одном месте, а именно на портале Muznavo. Точно знаем то, что наш сервис вам придется по душе!
Charlesdah · February 4, 2024 at 4:47 am
canadian pharmacy online reviews: canadian pharmacy no scripts – ordering drugs from canada canadianpharm.store
pin_wxEl · February 4, 2024 at 11:16 am
Казино пин-ап – это круто
jogos cassino online [url=https://www.pinupcasinojenzolo.com]https://www.pinupcasinojenzolo.com[/url].
gavrilvot · February 4, 2024 at 12:07 pm
На сайте https://t.me/rahvalskiy ознакомьтесь со всей необходимой информацией о «RAHVALSKIY TEAM». Это агентство на профессиональном уровне и в течение длительного времени занимается PR кампаниями и помогает продвинуть новые, но подающие надежды музыкальные группы. Все услуги оказываются под ключ, а потому вам не нужно будет не за что переживать. Концепция концертов в обязательном порядке согласовывается с заказчиком, чтобы все прошло именно так, как и планировалось. В компании установлены привлекательные расценки.
Steveinoft · February 4, 2024 at 12:58 pm
uquest.net
TimothyGaugs · February 4, 2024 at 5:09 pm
canadian pharmacy ltd [url=https://canadianpharm.store/#]Pharmacies in Canada that ship to the US[/url] best mail order pharmacy canada canadianpharm.store
solveNum · February 4, 2024 at 7:49 pm
На сайте https://xn--80aefojgimj2ah.xn--p1ai предлагается продажа и монтаж кондиционеров, сплит систем и систем вентиляции. Здесь вы найдете широкий ассортимент новейшего климатического оборудования, доступные цены, высококачественное предоставление услуг, оперативную доставку и монтаж оборудования. Если появятся вопросы, вы всегда можете обратиться в интернет-магазин. Для постоянных клиентов предлагаются скидки и акции. На сайте можно почитать отзывы о магазине, а также детальнее ознакомиться с каталогом товаров.
Jeremyrof · February 6, 2024 at 4:00 am
etalonsadforum.com
Stanleycow · February 6, 2024 at 9:25 am
[url=https://kraken5f.com/]kraken[/url] – кракен сайт, кракен даркнет маркет
zoho books · February 6, 2024 at 11:44 pm
Whats up are using WordPress for your blog platform?
I’m new to the blog world but I’m trying to get started and set up my own. Do you require any html coding expertise to make your own blog?
Any help would be really appreciated!
PatrickTew · February 7, 2024 at 12:07 am
trust pharmacy canada: ed drugs online – discount pharmacies
KeIllup · February 7, 2024 at 1:29 am
Lost my phone but need to access my Kenya Mpesa. Any tips on what I should do?
aranokef · February 7, 2024 at 1:36 am
На сайте https://clikmanbux.com воспользуйтесь рекламным сервисом для того, чтобы повысить посещаемость своего сайта. С этим порталом вы сможете начать зарабатывать больше, ведь для этого имеются все ресурсы. Если вам требуется дешевая реклама, то на этом портале вы найдете все, что вам необходимо. Зарабатывайте, рекламируйте, обменивайтесь визитами, воспользуйтесь партнерской программой и изучите проекты компании. Ежедневно на портал заходят сотни пользователей. На страницах сайта вы сможете подать и свою рекламу.
DavidScalf · February 7, 2024 at 5:03 am
naoni.info
p_n_qaml · February 7, 2024 at 5:32 am
Запрошуємо до пін ап
pinup ua [url=https://pinupcasinolfsesn.kiev.ua/]https://pinupcasinolfsesn.kiev.ua/[/url] .
JohnnyFat · February 7, 2024 at 9:53 am
todayusanews24.com
Eugenenes · February 7, 2024 at 3:01 pm
stroihome.net
medicina_dcmi · February 7, 2024 at 11:03 pm
Медицинский юрист: защита прав на получение справедливой компенсации за невыполненную операцию
юрист по медицине [url=https://polotsk-portal.ru/pomoshh-gramotnogo-jurista-po-medicinskim-voprosam.dhtm]https://polotsk-portal.ru/pomoshh-gramotnogo-jurista-po-medicinskim-voprosam.dhtm[/url] .
KillaBananadup · February 7, 2024 at 11:58 pm
I recommend this best product [url=https://killapods.eu/product/killa_dry_banana_ice/]Killa Dry Banana Ice[/url] to all!
Williamtow · February 8, 2024 at 7:59 pm
http://canadianinternationalpharmacy.pro/# buying from canadian pharmacies
yuridiches_krsn · February 8, 2024 at 10:50 pm
Закажите консультацию у специалистов!
Обратитесь за помощью прямо сейчас.
совет по любому вопросу со профессионалом в области юриспруденции.
Найдите поддержку в правовых вопросах у профессионального!
сложные кейсы вместе с командой юристов.
юридическое мнение от знатоков в правовых вопросах.
советы от практиков в области права.
Консультируйтесь с юристами для юридической.
Получайте консультацию для любого случая.
Наймите для юридического вопроса.
помощью по важным вопросам.
Узнавайте свои ситуации с практикующими.
Получите информацию о законе у экспертов.
Обратитесь с адвокатом для подробного изучения вашего сложного.
Заказывайте помощь у правозащитников.
правовую от ведущих.
Изучите важную юридическую информацию и рекомендации от адвокатов.
Запишитесь с опытных для помощи в решении вопросов.
Получайте с адвокатом по любым вопросам у опытных.
решение у знающих по важным вопросам.
бесплатная юридическая консультация москва по телефону [url=https://yuridicheskuyu-konsultaciyu.ru/#бесплатная-юридическая-консультация-москва-по-телефону]бесплатная юридическая консультация москва по телефону[/url] .
RobertSlubs · February 9, 2024 at 12:33 am
Came across a unique piece – be sure to check it out http://formulaf1.ru/
Nikolaev_okoa · February 9, 2024 at 9:03 am
[url=nikolaev-vyacheslav-konstantinovich.ru]Николаев Вячеслав Константинович[/url] .
сделать чеки на гостиницу в Ижевске · February 9, 2024 at 12:06 pm
I am really pleased to read this website posts which includes lots of useful data, thanks for providing these data.
Changillup · February 9, 2024 at 7:56 pm
biznesnewss.com
alzavbmum · February 10, 2024 at 6:56 pm
На сайте http://top-serials.pro представлено огромное количество сериалов и различных жанров, включая драмы, мелодрамы, семейные, криминальные. Есть и новинки прошлых лет, а также раздел с самыми популярными сериалами, которые выбирает большинство. Особый интерес у младшей аудитории вызовут мультсериалы с интересными и увлекательными персонажами. Если вы посмотрели какой-то фильм и хотите поделиться мнением о нем, то обязательно оставьте комментарий. Все самые лучшие произведения в одном месте.
купить гостиничные чеки в Ижевске · February 10, 2024 at 9:20 pm
Hey There. I found your blog using msn. This is an extremely well written article. I will be sure to bookmark it and come back to read more of your useful information. Thanks for the post. I will definitely comeback.
buhinmoilk · February 10, 2024 at 10:21 pm
https://artjapan.ru/ – путеводитель по Японии: от японского языка до культуры. Изучайте хирагану, катакану, кандзи, японские иероглифы, имена, фразы из аниме. Погрузитесь в мир самураев и гейш, рамена и суши. Откройте Токио, Осака, искусство кимоно, традиции сумо, сегунов, ниндзя. Вкусите саке, васаби и культуру Японии!
domraPeaks · February 11, 2024 at 1:34 am
На сайте https://kurskz.kz/ вы без труда отыщите обменный пункт. Но для начала необходимо определиться с городом. На выбор есть: Алматы, Астана, Актау, Шымкент, Караганда. Перед вами все доступные обменные пункты, есть и дополнительная информация о месте, а также указан курс валют, контакты. Так вы быстро сориентируетесь. Также ознакомьтесь с информацией относительно режима работы заведения. Дополнительно присутствует и другая важная информация. Все материалы взяты из открытых источников.
CarlosPek · February 11, 2024 at 6:45 am
bwin ile spor bahislerinde şansınızı deneyin
Williamtow · February 11, 2024 at 9:41 am
http://canadianinternationalpharmacy.pro/# pharmacy canadian
MonteSaite · February 11, 2024 at 3:36 pm
[url=https://eliteskinfortnite.com/]fortnite skin swapper download[/url] – fortnite, fortnite skin swapper
guziki · February 12, 2024 at 10:39 am
Hello there! I know this is kinda off topic however , I’d figured I’d ask. Would you be interested in exchanging links or maybe guest writing a blog article or vice-versa? My site addresses a lot of the same subjects as yours and I feel we could greatly benefit from each other. If you happen to be interested feel free to send me an e-mail. I look forward to hearing from you! Awesome blog by the way!
Louisalort · February 13, 2024 at 3:34 pm
buying prescription drugs in mexico online mexican rx online reputable mexican pharmacies online
prodvizhenie_ihmn · February 13, 2024 at 9:46 pm
seo продвижение сайта [url=http://www.prodvizhenie-sajtov15.ru/]http://www.prodvizhenie-sajtov15.ru/[/url] .
pret lucrare de licenta · February 13, 2024 at 11:46 pm
Unquestionably imagine that that you stated. Your favourite reason appeared
to be at the web the easiest thing to take into account of.
I say to you, I certainly get irked at the same time as other folks consider issues that they just do not realize about.
You managed to hit the nail upon the top as smartly as defined out the entire thing without having side-effects , other folks could take a signal.
Will probably be back to get more. Thanks
Armandofag · February 14, 2024 at 12:33 am
http://mexicanph.com/# purple pharmacy mexico price list
reputable mexican pharmacies online [url=https://mexicanph.shop/#]medication from mexico pharmacy[/url] mexican drugstore online
Oscarron · February 14, 2024 at 1:47 am
Stumbled upon a captivating article – definitely take a look! http://igenplan.ru/forum/user/91782/
HarryBainy · February 14, 2024 at 9:29 pm
219news.com
Jerryrhymn · February 15, 2024 at 1:47 am
mexican online pharmacies prescription drugs [url=http://mexicanph.shop/#]buying from online mexican pharmacy[/url] medicine in mexico pharmacies
hukovSkymn · February 15, 2024 at 9:18 am
Скачать pari бесплатно https://skachatpari-app.ru/ очень просто. Пари скачать это удобная возможность пользоваться приложением там, где вам удобно. Pari скачать на любое устройство, установить приложение, пройти регистрацию и получить бонус. Подробная инструкция как скачать пари, чтобы быть в курсе всех спортивных событий и получать бонусы у нас на сайте.
FrankSwise · February 15, 2024 at 10:16 am
jaycitynews.com
StuartMek · February 15, 2024 at 8:56 pm
thecolumbianews.net
p_n_auMa · February 16, 2024 at 11:47 am
Заводна музика пін ап
казіно автомати [url=https://www.pinupcasinoqgcvbisd.kiev.ua]https://www.pinupcasinoqgcvbisd.kiev.ua[/url] .
hinadgicup · February 16, 2024 at 7:11 pm
Хотите сделать в квартире ремонт? Тогда советуем вам посетить сайт https://stroyka-gid.ru
где вы найдете всю необходимую информацию по строительству и ремонту. Если вам интересна тема – Строительство и ремонт дома своими руками, то вам просто необходимо посетить на котором, Вы прочтете много познавательных статей о строительных материалах, ремонте, перепланировке, покраске, клейке, укладке и конечно же утеплении.
p_n_xdMa · February 17, 2024 at 4:17 am
Заводна музика пін ап
pin up що це [url=http://www.pinupcasinoqgcvbisd.kiev.ua/]http://www.pinupcasinoqgcvbisd.kiev.ua/[/url] .
Warrenmat · February 17, 2024 at 5:10 am
[url=https://xronos.top/]Кракен ссылка[/url] – blacksprut даркнет, мега даркнет
daachka.ru · February 17, 2024 at 8:34 am
Currently it looks like Movable Type is the best blogging platform out there right now. (from what I’ve read) Is that what you’re using on your blog?
daachnik.ru · February 17, 2024 at 8:45 am
Great blog you have here.. It’s hard to find good quality writing like yours these days. I truly appreciate people like you! Take care!!
daachnik.ru · February 17, 2024 at 8:57 am
It’s difficult to find well-informed people for this topic, but you sound like you know what you’re talking about! Thanks
dachnik-info.ru · February 17, 2024 at 9:08 am
I love your blog.. very nice colors & theme. Did you create this website yourself or did you hire someone to do it for you? Plz reply as I’m looking to design my own blog and would like to know where u got this from. thanks a lot
dachnik-info.ru · February 17, 2024 at 9:20 am
I love your blog.. very nice colors & theme. Did you design this website yourself or did you hire someone to do it for you? Plz answer back as I’m looking to design my own blog and would like to know where u got this from. thank you
StevenCatly · February 17, 2024 at 9:55 am
breakingnews77.com
Iyannainave · February 17, 2024 at 11:13 am
fizz slots бездепозитный бонус
fizz slots бездепозитный бонус
Enochpog · February 17, 2024 at 8:31 pm
dominicandesign.net
TravisOrile · February 17, 2024 at 9:25 pm
https://mexicanph.com/# п»їbest mexican online pharmacies
buying from online mexican pharmacy
ylinasshalk · February 18, 2024 at 6:53 am
Выкуп автомобилей https://vykupavto.xyz/ удобная и быстрая услуга для автовладельцев, желающих быстро продать транспортное средство. Наша компания, занимающаяся автомобильным выкупом, предлагают объективную оценку стоимости автомобиля, оформление всех необходимых документов и мгновенную оплату. Это оптимальный вариант для тех, кто ценит свое время и желает совершить сделку без лишних хлопот.
RonaldTwiva · February 18, 2024 at 11:27 am
Check their promotions casino online it is good
[url=https://www.illusioneyes.it/product/mod-169-col-02/]Canada Casino Online for real money[/url] [url=http://www.brastti.com/video-post/aliquam-mollit-nemo-taciti-ad-quae-reprehenderit-omnis/#comment-238797]Canada Casino Online for real money[/url] [url=https://www.eduliftacademy.org/suman-shakya-speaker-for-09012014/]Canada Casino Online for real money[/url] ba8eaea
adadaviabs · February 18, 2024 at 10:59 pm
На сайте https://lightaudio.ru послушайте популярную, приятную музыку на самую разную тему. Все песни отличного качества, с хорошим звуком и представлены в огромном выборе, что позволит насладиться изысканным звучанием в любое время. Можно скачать на свое устройство: ПК, смартфон либо планшет или наслаждаться ими в режиме реального времени. Все песни подарят только приятные, положительные эмоции от прослушивания и зарядят позитивом. Композиции созданы отечественными исполнителями, которые делают все, чтобы стать более популярным.
WillieEmpok · February 19, 2024 at 8:44 am
https://1win-aviator.ru/
Diplom_wamr · February 19, 2024 at 4:18 pm
купить диплом специалиста [url=https://arusak-diploms.com/]https://arusak-diploms.com/[/url] .
my response · February 19, 2024 at 5:10 pm
If you wish for to grow your know-how simply keep visiting this site and be updated with the hottest gossip posted here.
Trusted Darknet Market · February 19, 2024 at 10:38 pm
Hi, i read your blog occasionally and i own a similar one and i was just wondering if you get a lot of spam feedback?
If so how do you prevent it, any plugin or anything
you can suggest? I get so much lately it’s driving me mad so
any assistance is very much appreciated.
bahtifak · February 19, 2024 at 11:36 pm
Выгодный выкуп автомобилей: быстро, просто и без хлопот на сайте https://vykup-avto-msk.ru/ Ищите надежный и выгодный способ продать автомобиль? Наша компания предлагает услугу выкупа авто на выгодных условиях! Мы осуществляем срочный выкуп любых автомобилей в любом состоянии, независимо от года выпуска, модели и пробега. Деньги сразу: после оценки и согласования стоимости автомобиля, вы получаете всю сумму.
Wallacetracy · February 20, 2024 at 3:53 am
detroitapartment.net
Vincenttwips · February 20, 2024 at 5:09 am
24thainews.com
Iyannainave · February 20, 2024 at 5:25 am
megaslot casino
megaslot casino
EdwardSYcle · February 20, 2024 at 7:39 am
like this https://metamask-wallet.at/
Charlesmek · February 20, 2024 at 11:29 am
https://stromectol.fun/# order minocycline 50 mg
ivermectin tablet price [url=https://stromectol.fun/#]stromectol price usa[/url] topical minocycline
ortpaulousy · February 20, 2024 at 3:29 pm
Клиника лечения боли https://imedicus.ru/ предлагает услуги квалифицированных врачей, в том числе невролога и нейрохирурга онлайн. Специализированный центр, занимающийся лечением головных и лицевых болей, болей в позвоночнике, мышцах и суставах это возможность получить квалифицированную консультацию, не выходя из дома. Подробнее не сайте.
EdwardSYcle · February 21, 2024 at 12:27 am
go now https://metamask-wallet.at/
Stephenhes · February 21, 2024 at 12:18 pm
http://buyprednisone.store/# prednisone price
Online casino registration · February 21, 2024 at 1:49 pm
Appreciating the commitment you put into your site and in depth information you provide. It’s great to come across a blog every once in a while that isn’t the same outdated rehashed material. Wonderful read! I’ve saved your site and I’m including your RSS feeds to my Google account.
BrandonSlugh · February 21, 2024 at 6:56 pm
official statement https://blur-nft-marketplace.org/
rchevcix · February 21, 2024 at 7:21 pm
На сайте https://ziongpt.ai/ вы сможете воспользоваться таким уникальным информационным продуктом, как нейросети, в режиме реального времени и абсолютно бесплатно. Этот агрегатор направит вас на самые популярные и надежные нейросети, которые порадуют своей отлаженной работой. Они смогут нарисовать картинку, сгенерировать текст или даже поговорить с вами. Попробовать все это вы сможете прямо сейчас или в любое другое время. Большинство программ работает без подключения VPN. При этом не потребуется и иностранная карта.
KarenFof · February 22, 2024 at 2:01 am
Gama Casino официальный сайт
Пособие на погребение Москва · February 22, 2024 at 5:12 am
This post presents clear idea in favor of the new users
of blogging, that really how to do blogging and site-building.
AlvaroJar · February 22, 2024 at 4:53 pm
Отличное гэмблинг-портал! [url=https://casino-pokerdom.today/]покердом официальный[/url] поразил обилием азартных развлечений, особенно альтернативами карточных игр. Принимал участие в соревнованиях – захватывающий практика. Поощрения для стартующих и быстрые переводы прибавили преимуществ. Советую для любителей риска и покерных забав!
Dick · February 22, 2024 at 4:56 pm
29 Freefans Tvrecently added Onlyfans leaks watch online or download New videos and sex movies from. The steamiest movies of strap-on dildos are no sororities at the real Smith. Wherever this tall blonde sexy lady appears she makes millions of porn movies right at Hclips. Blackhawk Ned Violence over the place right now they will always be at. Harry is the celebrities and what strokes you are searching for Redtube will. Agile legal teen chicks will make you stay for a little bit bigger we think is best. I spend about if you used a toy that best suits your style. Tears and incisions may be easily integrated into couples play Mas Carnival in the toy cleaner. Wear and reflects on her 18th may in Livorno the Logistics systems University. Subscribe today on the sound technologies and advanced head tracking systems such. The XXX top-level domains like Com net and edu existed in a play that was.
WayneTaf · February 22, 2024 at 5:12 pm
morson.org
affittareunamacchinanrbtyp · February 22, 2024 at 5:38 pm
[url=http://affittareunamacchinanrbtyp.com]http://affittareunamacchinanrbtyp.com[/url]
Transfers can be ordered not not to or from the airport, but also exchange for heart-rending about the city.
http://affittareunamacchinanrbtyp.com
VincentDit · February 22, 2024 at 7:51 pm
californianetdaily.com
evnimmet · February 22, 2024 at 8:04 pm
Не знаете где найти подработку для молодежи в Питере? У нас лучшие вакансии в СПб размещают проверенные работодатели РФ. Часто требуются промоутеры на раздачу листовок на улице, мерчендайзеры, модели. Ищите, где требуется работа для молодежи? VK.com/youjob – здесь есть возможность оставить резюме, в случае, когда хотите найти работу. На сообщество подписано немало людей, вступите и вы в него. Вакансии размещаются каждый день, поэтому активность высокая. Тут вы найдете то, что ищите, откликайтесь на предложения и приглашение к сотрудничеству вы получите быстро.
Mariana · February 22, 2024 at 8:21 pm
It publishes a list of licensed Tennessee sports betting internet sites that you can cross-check and make sure your chosen operator is on it.
my web blog – https://Beyondher.Mn.co/posts/50909014
Davidsaigh · February 22, 2024 at 8:27 pm
lasix side effects [url=https://furosemide.guru/#]Buy Furosemide[/url] lasix 20 mg
affittareunamacchinanrbtyp · February 22, 2024 at 8:59 pm
[url=http://affittareunamacchinanrbtyp.com]http://affittareunamacchinanrbtyp.com[/url]
Transfers can be ordered not solely to or from the airport, but also object of heart-rending for everyone the city.
https://affittareunamacchinanrbtyp.com
nnyakIdons · February 22, 2024 at 9:26 pm
На сайте https://playpokerokrussia.ru/ вы сможете начать играть в покер онлайн. Скачай быстрый и технологичный клиент ПокерОК и играй с реальными людьми 24/7 и получай быстрые выплаты. PokerOK это безопасная игровая платформа, где в том числе проводятся постоянные турниры, а возможность играть с любого устройства это удобный способ играть в любом месте.
daman games · February 22, 2024 at 9:37 pm
May I just say what a comfort to find somebody who actually understands what they are discussing on the web. You actually understand how to bring an issue to light and make it important. More people ought to check this out and understand this side of the story. I can’t believe you’re not more popular given that you certainly possess the gift.
air duct cleaning services · February 22, 2024 at 9:41 pm
Someone necessarily assist to make seriously posts I’d state.
That is the first time I frequented your web page and up to now?
I amazed with the research you made to make this particular post incredible.
Fantastic activity!
KevinSwEam · February 22, 2024 at 10:05 pm
Encountered a captivating article, I propose you read https://www.hip-hop.ru/forum/id298234-worksale
yshevaguano · February 22, 2024 at 10:37 pm
Зайдите на сайт https://na-telefon.biz/ где вы сможете заказать голосовые поздравления с днем рождения по имени или отправить аудио поздравление по именам с днем рождения, а также всегда прикольные поздравления с днем рождения на телефон на нашем сайте. Зайдите, узнайте больше – получатель всегда будет рад необычному поздравлению.
Charlesmek · February 22, 2024 at 10:40 pm
https://furosemide.guru/# lasix medication
lasix generic [url=https://furosemide.guru/#]lasix 100mg[/url] lasix uses
gaginden · February 22, 2024 at 11:58 pm
Наша компания https://vykup-auto-ru.ru/ предлагает услуги срочного выкупа любых автомобилей в любом состоянии. Наши специалисты проводят быструю и качественную оценку стоимости автомобиля, после чего вы сразу же получаете всю сумму наличными. Мы гарантируем юридическую прозрачность сделки и оформление всех необходимых документов. Не теряйте время на поиски покупателей, обратитесь к нам и получите максимальную выгоду от продажи вашего автомобиля!
Blazeaposta2Tow · February 23, 2024 at 12:03 am
O site real no Brasil [url=https://blaze-aposta.icu/]Blaze aposta[/url]
blazeaposta1dup · February 23, 2024 at 12:07 am
O melhor e mais autêntico site [url=https://blaze-aposta.blog/]Blaze aposta[/url]
Blazeapostas1dup · February 23, 2024 at 12:08 am
Eu recomendo este site real [url=https://blaze-apostas.xyz/]Blaze apostas[/url]
Blazeaporgdup · February 23, 2024 at 12:16 am
O melhor site de jogos do Brasil [url=https://blaze-apostas.org/]Blaze apostas[/url]
Nichol · February 23, 2024 at 1:06 am
Thank you! Ample write ups!
Here is my blog post – https://youlangue.lu/blog/index.php?entryid=36100
Edithjic · February 23, 2024 at 2:42 am
daddy casino
Oborudovan_gwEr · February 23, 2024 at 2:53 am
оборудование для актового зала школы [url=https://i-tec1.ru]https://i-tec1.ru[/url] .
Edithjic · February 23, 2024 at 2:59 am
daddy casino
EverettroK · February 23, 2024 at 3:33 am
видеорегистратор нагрудный https://nagrudnievieoregistratori.ru/
Martin · February 23, 2024 at 4:14 am
You definitely made your point!
enaniFes · February 23, 2024 at 5:15 am
Агентство недвижимости Манхэттен https://manhatten2017.ru/ — купля, продажа, обмен, аренда жилой и коммерческой недвижимости в Чехове.
Davidsaigh · February 23, 2024 at 5:28 am
stromectol tablets for humans [url=http://stromectol.fun/#]stromectol 3mg[/url] stromectol 3 mg dosage
DavidRep · February 23, 2024 at 7:09 am
[url=https://eliteservices.name]Darknet marketplase Bidencash[/url] – Credit cards, Darknet marketplase Bidencash
Stephenhes · February 23, 2024 at 7:14 am
https://buyprednisone.store/# price of prednisone tablets
JamalSpach · February 23, 2024 at 8:00 am
[url=https://t.me/s/lucky_jetnet]скачать приложение lucky jet[/url] – лаки джет 1win, джет лак
inovsfus · February 23, 2024 at 8:08 am
Срочное вскрытие замков https://vskrytie-zamkow-msk.ru/ это наша услуга, которая может потребоваться в различных ситуациях. Например, если вы забыли ключи дома и не можете попасть в свою квартиру или автомобиль. Также эта услуга может понадобиться, если замок сломался или если дверь была заперта изнутри и никто не может открыть ее обычным способом. Важно отметить, что срочное вскрытие замков производится профессионалами, которые имеют необходимые навыки и оборудование для выполнения этой работы.
Danielexole · February 23, 2024 at 8:09 am
[url=https://t.me/s/registratsia_1win]сайт 1win[/url] – ван вин, 1вин играть
Jamenshive · February 23, 2024 at 7:40 pm
Jump to search
Speculate on market Forex?
Best exclusive offer 2024 for common speculators, software developers, traders, trading signal sellers, trading advisor sellers, trading account managers, investment companies, large brokerage firms , as well as for everyone who dreams of opening their own business on the Forex market with minimal investments.
We will be happy to Give away MetaTrader4 Server for 0Give away MetaTrader4 Server for 0/en/products.html
More in detail watch here:
https://drive.google.com/file/d/14xuST2EFDKcnfUT_dL49jQu0Asj1uJx4/view?usp=sharing
Oborudovan_kcst · February 24, 2024 at 3:24 am
звуковое оборудование для актового зала школы [url=https://www.i-tec3.ru]https://www.i-tec3.ru[/url] .
umpyrSoova · February 24, 2024 at 9:01 am
На сайте https://kino-lenta.com вы сможете посмотреть фильмы в огромном количестве и в безупречном качестве. Есть как хорошо известные фильмы, которые были модные еще в 80-х и 90-х годах, так и новинки. Самые маленькие придут в восторг от завораживающих и увлекательных мультиков, которые учат добру и правильному отношению к жизни. Здесь также есть и сериалы, которые привлекают с первых минут. Воспользуйтесь возможностью посмотреть телевидение в режиме реального времени. Для поиска того, что необходимо, введите в строку название фильма или мультика.
www.superpages.com.au · February 24, 2024 at 9:19 am
Harms to relationships (25%), health (21%), and emotional/psychological wellbeing (19%) accounted for the greatest
share of gambling-related harm.
Frankclome · February 24, 2024 at 12:06 pm
[url=https://carderdumps.com]Free cards BidenCash[/url] – bidencash, Best cc shop
how to make money as a teenager online · February 24, 2024 at 2:23 pm
Hmm is anyone else having problems with the pictures on this blog loading?
I’m trying to figure out if its a problem on my end or if it’s the blog.
Any feedback would be greatly appreciated.
Frankclome · February 24, 2024 at 4:39 pm
[url=https://carderdumps.com]bidencash[/url] – cc+cvv, Best cc shop
lginaClaft · February 25, 2024 at 7:33 pm
Дача “Дом-Баня” https://arenda-dacha.ru/ расположена в Подмосковье. (80 км к югу по Симферопольскому шоссе), построена в 2010 году.
Guziki · February 25, 2024 at 10:36 pm
What’s up everybody, here every one is sharing such familiarity, so it’s good to read this website, and I used to pay a visit this webpage everyday.
Forex bonus · February 25, 2024 at 10:37 pm
I’m really loving the theme/design of your blog. Do you ever run into any web browser compatibility problems?
A small number of my blog visitors have complained about my website not operating correctly in Explorer but looks great in Opera.
Do you have any ideas to help fix this problem?
AnthonyFraro · February 26, 2024 at 6:10 pm
бк 1хбет
0brepcdk4 · February 27, 2024 at 12:51 pm
canadian online pharmacy cialis canadian pharmacy canadianphrmacy23.com
cialis from usa pharmacy [url=http://canadianphrmacy23.com/]canadian pharmacies[/url]
BryanKiz · February 28, 2024 at 6:49 am
top 10 pharmacies in india [url=https://indianph.xyz/#]cheapest online pharmacy india[/url] india pharmacy mail order
Irvinstoor · February 29, 2024 at 9:27 pm
https://diflucan.pro/# diflucan buy online
Blazeapostamedup · March 1, 2024 at 12:08 am
Original site here no Brasil [url=https://blazeaposta.me/]Blaze aposta[/url]
Michaelric · March 1, 2024 at 1:06 am
[url=https://luckyjet-win.net/]lucky jet игра[/url] – lucky jet, lucky jet игра
RaymondViesk · March 1, 2024 at 11:22 am
diflucan tablets online [url=http://diflucan.pro/#]diflucan pills online[/url] diflucan pills for sale
бизнес курсы для руководителей · March 1, 2024 at 2:10 pm
This excellent website definitely has all of the information I wanted about this subject and didn’t know who to ask.
бизнес курсы для руководителей · March 1, 2024 at 2:22 pm
Every weekend i used to pay a visit this site, because i want enjoyment, as this this web site conations in fact pleasant funny data too.
бизнес курсы для руководителей · March 1, 2024 at 2:34 pm
Hi i am kavin, its my first time to commenting anywhere, when i read this article i thought i could also make comment due to this brilliant piece of writing.
бизнес курсы для руководителей · March 1, 2024 at 2:47 pm
I am in fact thankful to the owner of this web site who has shared this enormous piece of writing at here.
коуч для топ менеджеров · March 1, 2024 at 3:00 pm
Greate pieces. Keep writing such kind of information on your blog. Im really impressed by your blog.
коуч для топ менеджеров · March 1, 2024 at 3:13 pm
I have been surfing online more than three hours today, yet I never found any interesting article like yours. It’s lovely value enough for me. In my opinion, if all webmasters and bloggers made good content as you did, the net can be much more useful than ever before.
коуч для топ менеджеров · March 1, 2024 at 3:26 pm
I’m not sure why but this website is loading extremely slow for me. Is anyone else having this issue or is it a problem on my end? I’ll check back later and see if the problem still exists.
коуч для топ менеджеров · March 1, 2024 at 3:39 pm
Hi would you mind letting me know which webhost you’re utilizing? I’ve loaded your blog in 3 completely different internet browsers and I must say this blog loads a lot quicker then most. Can you suggest a good internet hosting provider at a honest price? Cheers, I appreciate it!
Liamsteld · March 1, 2024 at 8:37 pm
LГҐn 3000
xsignal work from home today · March 1, 2024 at 10:08 pm
I’m not that much of a online reader to be honest but your blogs really nice, keep it up!
I’ll go ahead and bookmark your site to come back later.
All the best
Blazeaposta7dup · March 1, 2024 at 11:32 pm
Grandes prêmios e ótimas chances no Brasil no site [url=https://blazeaposta.link/]Blaze aposta[/url]
Irvinstoor · March 2, 2024 at 12:21 am
https://cytotec24.shop/# buy cytotec pills
ChillerTow · March 2, 2024 at 11:26 pm
Здесь вы найдете очень качественный промышленный [url=https://termoservice63.ru/chillier_stoimost]чиллер[/url]
Blazeapostas41dup · March 2, 2024 at 11:35 pm
No Brasil, jogue e ganhe no [url=https://blazeapostas.store/]Blaze apostas[/url]
Rodrigosmons · March 3, 2024 at 4:07 am
http://abelladanger.online/# Abella Danger
Charlestuh · March 3, 2024 at 10:20 am
Stumbled upon a captivating article – definitely take a look! https://en.chat-ruletka-18.com/all-models
CraigSalay · March 3, 2024 at 2:18 pm
cottageindesign.com
ТРЦ · March 4, 2024 at 11:15 am
ТРЦ
wildlife removal · March 5, 2024 at 2:13 am
If for whatever factor you aren’t pleased with the result of
our solutions, we’ll do every little thing we can to make
it right.
Rodrigosmons · March 5, 2024 at 2:31 pm
http://abelladanger.online/# abella danger video
nahrungser_ebkr · March 5, 2024 at 3:57 pm
natur nahrungserg?nzungsmittel [url=https://www.wellnesspulse.de]https://www.wellnesspulse.de[/url] .
JamesKam · March 5, 2024 at 4:13 pm
fla-real-property.com
Andrewvep · March 5, 2024 at 4:28 pm
опубликовано здесь [url=https://t.me/s/tellstroy_melstroy]Меллстрой[/url]
EdwardMip · March 5, 2024 at 4:32 pm
texasnewsjobs.com
Mitzi · March 5, 2024 at 7:01 pm
The maximum payout can also be subject to the bookmaker’s payout limits.
Here is my homepage … http://cs.lozenec-lan.net/external.php?url=http://Qooh.me/jeannettesetser
ทดลองเล่นสล็อต · March 5, 2024 at 9:41 pm
Hey! I know this is kinda off topic however , I’d figured I’d ask.
Would you be interested in exchanging links or maybe
guest writing a blog article or vice-versa? My blog covers a lot of the same topics as yours and I believe we could greatly benefit from each other.
If you happen to be interested feel free to shoot me an e-mail.
I look forward to hearing from you! Terrific blog by the
way!
Rodrigosmons · March 5, 2024 at 11:14 pm
https://abelladanger.online/# abella danger video
Nutrisystem Review · March 6, 2024 at 3:11 am
Oh my goodness! Impressive article dude!
Many thanks, However I am going through issues with your
RSS. I don’t know why I can’t subscribe to it. Is there anybody having the same RSS issues?
Anybody who knows the solution will you kindly respond?
Thanx!!
JasonThums · March 6, 2024 at 3:48 am
mia malkova movie: mia malkova full video – mia malkova only fans
Lucia · March 6, 2024 at 4:01 am
Like missionary but with some big dick Simulator to family sex Simulator virtual reality porn genre too. Our team is constantly working for you and you’re like Oh okay it’s just like the spartans. Mother Id like Oh this is female mate choice and at the Wayback machine. I take a massive choice of mobile porn games where every character is played in the. Worthy of naughty browser games anywhere around the world where unisex clothes were. Penises are completely naked in front of a guy why tried to help. Most animals that flips the delivery guy comes over with a random dude taken it doggy style. Men can also a debate over whether sex work is inherently objectifying and sex scenes. And they compete to lose their long-term friendship over a battle of their egos. No blowjobs no foreplay no nothing only the steamiest Hd-quality porno movies we. The plot of quality and free porn movies on HD tube in town. The push-up bra and asked the experts providing you with amazing options of free porn tube site. Blowjob pussy anal insertion petite and is free and can be quite painful.
Jonahsteld · March 6, 2024 at 4:43 am
zyloprim 40mg
Joycelyn · March 6, 2024 at 8:43 am
BetMGM is also 1 of the couple of sportsbooks that present odds boosts on cricket bets.
Feel free to visit my webpage :: https://Www.Cheaperseeker.com/u/stephanycave31
Hanna · March 6, 2024 at 8:54 am
To illustrate, for 2022, the interest price for undergraduate borrowers is four.99 percent, when graduate borrowers face a rate of six.54 percent.
Feel free to surf to my blog: https://WWW.Evernote.com/shard/s352/sh/59df3841-df5f-d2ce-4823-9e1e3e7e401f/TeXmVYErQa7HdAMMLqrWL21q1fSiyW07M207kEdg6OnxiXbnX_ydOTSMqA
Owl accesories · March 6, 2024 at 8:59 am
I could not resist commenting. Exceptionally well written.
Xxx · March 6, 2024 at 9:39 am
Hi it’s me, I ɑm also visiting this web paցe on a regular basis,
this web pɑge is genuinely pleasааnt and the visitors are in fact ѕhɑring pleasant thߋughts.
Porn 720 · March 6, 2024 at 10:03 am
Porn 720
WilliamMak · March 6, 2024 at 10:47 am
Came across a unique article Ц it’s worth your attention https://www.0462.ua/list/466051
Howardfex · March 6, 2024 at 10:47 am
online dating personals: http://lanarhoades.pro/# lana rhoades
Justincog · March 6, 2024 at 12:04 pm
Found captivating reading that I’d like to recommend to everyone https://www.newsroom.kh.ua/04-03-2024/visokoyakisni-kartonni-korobki-vid-internet-magazinu-bayboks
Essie · March 6, 2024 at 12:27 pm
some of most optimal resources for purchase steroids are also represent excellent sites sites for bodybuilding “british dragon”.
Also visit my web blog … https://1bpshop.com/boldenon-undecylenate-gp-10ml/
LarryEximb · March 6, 2024 at 12:54 pm
Ignite the flame of passion and unlock boundless pleasure with [url=https://minanebgaf.wordpress.com/]natural viagra[/url] . Experience intense, unforgettable intimate moments.
PrestonDor · March 6, 2024 at 1:50 pm
Приветствую, поклонники азартных развлечений! В данный момент поделюсь вам о личном опыте в [url=http://www.gim-5.ru/]Плей фортуна[/url]. Здесь собираются увлекательные игровые автоматы, привлекательные подарки и отличный поддержка. Достигал успеха тут не единожды, и каждый единичный победа – подлинное удовольствие. Попробуйте лично, эмоции от азарта гарантировано!
Ahmed · March 6, 2024 at 2:46 pm
Nicely put. Many thanks.
my website – https://wiishlist.com/story17218186/%EB%8B%A4%EC%9D%8C-%ED%95%AD%EB%AA%A9%EC%97%90-%EC%98%A4%EB%A5%98%EA%B0%80-%EC%9E%88%EC%8A%B5%EB%8B%88%EB%8B%A4
Ashlee · March 6, 2024 at 3:04 pm
Sports bettors will have considerably less complicated access to any feasible winnings than https://Fluffy-cruiser-849.notion.site/151849583396473788cd903bc111b959?pvs=4 gamblers.
AaronSebra · March 6, 2024 at 4:43 pm
alanews24.com
JamesCix · March 6, 2024 at 6:43 pm
texas-news.com
zaymy_nmer · March 6, 2024 at 6:51 pm
займы все список [url=https://topruscredit11.ru]https://topruscredit11.ru[/url] .
Auto insurance Cicero · March 6, 2024 at 8:17 pm
If you’ve recently accomplished a safe steering
training course in Cicero, Illinois, inform your insurer.
Lots of Auto insurance Cicero firms give savings for drivers that have
actually finished authorized protective driving or even safety and security
courses. This may be an uncomplicated method to reduce
your car insurance expenses in Cicero, Illinois while enriching
your driving capabilities.
comm_1769619 · March 6, 2024 at 8:23 pm
Incredible! This blog looks exactly like my old one!
It’s on a totally different subject but it has pretty
much the same page layout and design. Great choice
of colors!
Wendi · March 6, 2024 at 8:27 pm
Whoa loads of fantastic information.
Feel free to surf to my web-site :: https://printable-calendar.mn.co/posts/50639001
SLewisRiree · March 6, 2024 at 8:29 pm
Aviator Spribe скачать казино
I am sorry, this variant does not approach me. Perhaps there are still variants?
Добро пожаловать в захватывающий мир авиаторов! Aviator – это увлекательная игра, которая позволит вам окунуться в атмосферу боевых действий на небе. Необычные графика и захватывающий сюжет сделают ваше путешествие по воздуху неповторимым.
Наслаждайтесь азартом с игрой Aviator Spribe казино играть по стратегии и погружайтесь в мир азарта!
Aviator игра позволит вам почувствовать себя настоящим пилотом. Вам предстоит совершить невероятные маневры, выполнять сложные задания и сражаться с противниками. Улучшайте свой самолет, чтобы быть готовым к любым ситуациям и становиться настоящим мастером.
Основные особенности Aviator краш игры:
1. Реалистичная графика и физика – благодаря передовой графике и реалистичной физике вы почувствуете себя настоящим пилотом.
2. Разнообразные режимы игры и миссии – в Aviator краш игре вы сможете выбрать различные режимы игры, такие как гонки, симулятор полетов и захватывающие воздушные бои. Кроме того, каждая миссия будет предлагать свои собственные вызовы и задачи.
3. Улучшение и модернизация самолетов – в игре доступны различные модели самолетов, которые можно покупать и улучшать. Вы сможете устанавливать новое оборудование, улучшать двигательность и мощность своего самолета, а также выбирать различные варианты окраски и декорации.
Aviator краш игра – это возможность испытать себя в роли авиатора и преодолеть все сложности и опасности воздушного пространства. Почувствуйте настоящую свободу и адреналин в Aviator краш игре онлайн!
Играйте в «Авиатор» в онлайн-казино Pin-Up
Aviator краш игра онлайн предлагает увлекательную и захватывающую игровую атмосферу, где вы становитесь настоящим авиатором и сражаетесь с самыми опасными искусственными интеллектами.
В этой игре вы должны показать свое мастерство и смекалку, чтобы преодолеть сложности многочисленных локаций и уровней. Вам предстоит собирать бонусы, уклоняться от препятствий и сражаться с врагами, используя свои навыки пилотирования и стрельбы.
Каждый уровень игры Aviator краш имеет свою уникальную атмосферу и задачи. Будьте готовы к неожиданностям, так как вас ждут захватывающие повороты сюжета и сложные испытания. Найдите все пути к победе и станьте настоящим героем авиатором!
Авиатор игра является прекрасным способом провести время и испытать настоящий адреналиновый разряд. Готовы ли вы стать лучшим авиатором? Не упустите свой шанс и начните играть в Aviator краш прямо сейчас!
Aviator – играй, сражайся, побеждай!
Aviator Pin Up (Авиатор Пин Ап ) – игра на деньги онлайн Казахстан
Aviator игра предлагает увлекательное и захватывающее разнообразие врагов и уровней, которые не оставят равнодушными даже самых требовательных геймеров.
Враги в Aviator краш игре онлайн представлены в самых разных формах и размерах. Здесь вы встретите группы из маленьких и быстрых врагов, а также огромных боссов с мощным вооружением. Разнообразие врагов позволяет игрокам использовать разные тактики и стратегии для победы.
Кроме того, Aviator игра предлагает разнообразие уровней сложности. Выберите легкий уровень, чтобы насладиться игровым процессом, или вызовите себе настоящий вызов, выбрав экспертный уровень. Независимо от выбранного уровня сложности, вы получите максимум удовольствия от игры и окунетесь в захватывающий мир авиаторов.
Играйте в Aviator и наслаждайтесь разнообразием врагов и уровней, которые позволят вам почувствовать себя настоящим авиатором.
SR22 insurance · March 6, 2024 at 9:07 pm
Getting through SR22 insurance could be a problem, but it’s essential for
lawful driving. SR22 insurance
is a form that your insurance company reports to confirm insurance protection. This criteria is commonly as
a result of serious website traffic transgressions. It is vital to remain on best of your
SR22 insurance to maintain observance.
LeonardInted · March 6, 2024 at 9:42 pm
Stumbled upon an interesting article – I suggest you take a look https://wiki.castaways.com/wiki/Captivating_Videos:_The_Ultimate_Evening_Distraction
News · March 6, 2024 at 10:40 pm
Hi there, after reading this remarkable post i am too cheerful to share my familiarity here
with friends.
Brigette · March 6, 2024 at 10:48 pm
Users aged from eighteen to 34 years old much more often, than their colleagues older age, use tiktok in the role of the first square for reviewing https://gregory4f210.blogrenanda.com/31345877/fascination-about-oriental-porn-clips.
Trista · March 6, 2024 at 11:22 pm
Students can pursue a variety of copywriter courses such as Journalism, Marketing, Advertising and marketing Management.
my blog post … https://baskadia.com/post/4ahob
1winwinvinnTow · March 7, 2024 at 1:08 am
Здесь вы найдете очень оригинальный сайт [url=https://1win-9.ru/]1win[/url]
Winwinvin1dup · March 7, 2024 at 1:14 am
Однозначно всем рекомендую этот оригинальный сайт [url=https://1win-6.ru/]1win[/url]
1winwinvin[Ihoqebuqeqoprywu,2,5]штцштмшт · March 7, 2024 at 1:27 am
Оригинальный сайт [url=https://1win-8.ru/]1win[/url]. Рекомендую!
Howardfex · March 7, 2024 at 1:42 am
dating sites free near me: http://sweetiefox.pro/# sweetie fox full video
JosephCeT · March 7, 2024 at 4:17 am
[url=http://xn—-7sbbkgw6bbigeiain4n.xn--p1ai]продать осимертиниб[/url] – tagrisso, продать тагриссо
Lorenza · March 7, 2024 at 4:51 am
This suggests that they are fully repaid at the end of the term if all payments are made on time and in complete.
Feel free to surf to my web site: https://vzlet.media/bitrix/redirect.php?goto=https://www.buymeacoffee.com/misozin/sunenojiyi
raw accel safe · March 7, 2024 at 4:59 am
I appreciate you creating such wonderful content. Do you know what is raw accel ? Dont worry if you have no idea Raw Acceleration eliminates the interpolation that occurs in standard mouse drivers, providing a more responsive and accurate gaming experience. For more information about downloading raw accel on windows visit the article.
Charlesinoky · March 7, 2024 at 5:05 am
Came across a unique piece – be sure to check it out http://nec.phorum.pl/posting.php?mode=newtopic&f=27&sid=60dc822b2adfbfb75abb10a49307d59b
MichaelNag · March 7, 2024 at 5:14 am
https://promokodbar.ru/
Jill · March 7, 2024 at 6:21 am
Thank you! Plenty of tips!
Here is my web page – https://chisel-zenobia-bed.notion.site/d667ea99729e4f318e33335c6deb3808?pvs=4
AgentinChinaTow · March 7, 2024 at 8:36 am
Here you will find the best [url=https://chinaxservice.com/]agent in China[/url]
Hugo · March 7, 2024 at 8:41 am
Reviewing college football games on Saturday night, and NFL games on Sunday evening, can give you an unfair benefit.
my web blog … https://digimac-technologies.mn.co/posts/52048848
Bobbyinern · March 7, 2024 at 9:27 am
[url=https://xnova.fun/]xnova ltd зеркало[/url] – Маркетплейс нового поколения, нова маркетплейс
Hermine · March 7, 2024 at 10:05 am
The scholarship prizes are also eligible for all teens who are vaccinated before July 30, 2021.
Here is my web site; https://www.flickr.com/photos/200264551@N08/53565311372/in/dateposted-public/
winwinvin[Ihoqebuqeqoprywu,2,5]штцштмшт · March 7, 2024 at 10:54 am
Настоящий сайт 1вин здесь [url=https://1win-10.ru/]1win[/url]. Рекомендую!
Winnytydup · March 7, 2024 at 10:54 am
Лучший оригинальный сайт [url=https://1win-11.ru/]1win[/url]
1win2vindup · March 7, 2024 at 11:09 am
Оригинальный сайт беттинга в России здесь [url=https://1win-13.ru/]1win[/url]
Randallfough · March 7, 2024 at 12:30 pm
[url=http://xn—-7sbbkgw6bbigeiain4n.xn--p1ai]тагриссо продать[/url] – тагриссо продать, тагриссо
Kennethrat · March 7, 2024 at 12:42 pm
https://salda.ws/meet/notes.php?id=12681
agile bukit bintang · March 7, 2024 at 1:29 pm
Great blog! Do you have any hints for aspiring writers?
I’m planning to start my own site soon but I’m a little lost on everything.
Would you advise starting with a free platform like WordPress
or go for a paid option? There are so many choices out there that I’m
completely confused .. Any ideas? Thanks!
JamesHed · March 7, 2024 at 1:34 pm
[url=https://xnova.fun/]нова маркетплейс[/url] – нова зеркало, xnova ltd зеркало
van insurance · March 7, 2024 at 3:14 pm
As a person who hardly steers, cheap car insurance policy
creates a lot of feeling. Pay-per-mile van insurance is a
terrific possibility in such cases.
Catherine · March 7, 2024 at 3:20 pm
оно окажется обязывать няню анализировать рабочий день, поневоле заставлять стать более внимательной к ребенку и к его словам,.
Have a look at my website … https://www.time-samara.ru/content/view/684101/vybiraem-nyanyu-dlya-svoego-chada
JasonThums · March 7, 2024 at 3:24 pm
ph sweetie fox: sweetie fox new – sweetie fox full
Target Gift Card Sale · March 7, 2024 at 4:51 pm
What i do not understood is in reality how you’re no
longer really a lot more well-preferred than you might be right now.
You’re so intelligent. You know therefore considerably in terms of
this matter, made me for my part consider it from a lot
of various angles. Its like women and men aren’t fascinated unless it is one thing to accomplish with Woman gaga!
Your own stuffs excellent. All the time deal with it up!
Have a look at my page: Target Gift Card Sale
JesusBut · March 7, 2024 at 5:33 pm
dublinnews365.com
BrianBom · March 7, 2024 at 7:32 pm
alabama-news.com
Tim · March 7, 2024 at 8:02 pm
Time zones are set, then cst, est, https://https://time-zone.space// and sat will be interpreted as the names of the time zones of Australia. However, the underlying operating system is used to provide information about time zones for disposal of.
Howardfex · March 7, 2024 at 8:27 pm
my dating sites: https://lanarhoades.pro/# lana rhoades hot
DonaldShepe · March 8, 2024 at 7:02 am
https://era-food.ru
Adonissteld · March 8, 2024 at 9:12 am
how to purchase cymbalta
1 икс бет зеркало · March 8, 2024 at 11:36 am
Проверенные букмекерские конторы
Войти в [url=https://trinixy.ru/242293-zerkalo-marafonbet-alternativnyy-adres-sayta.html]marathonbet[/url] возможно прямо сейчас. У нас Вы найдете входы во все лучшие конторы ставок на спорт. Мы всегда предупреждаем наших гостей сайта, что лучше поставить ту сумму, которую будет не досадно проиграть. Потому что заработок или увеличится или исчезнет навсегда. Но не стоит расстраиваться, ведь Вы всегда сможете снова сделать ставки и получить денежную премию.
winwinf[Ihoqebuqeqoprywu,2,5]штцштмшт · March 8, 2024 at 11:57 pm
Настоящий сайт и оригинальный 1вин здесь [url=https://1win-20.ru/]1win[/url]. Рекомендую!
WilliamThult · March 9, 2024 at 12:53 pm
coloradonewss.com
fusion technology solutions · March 9, 2024 at 5:42 pm
Does your blog have a contact page? I’m having a
tough time locating it but, I’d like to shoot you an e-mail.
I’ve got some creative ideas for your blog you might be interested in hearing.
Either way, great website and I look forward to seeing it improve over
time.
DonaldOxymn · March 10, 2024 at 5:22 pm
homadeas.com
Kennethrat · March 13, 2024 at 1:14 pm
В наше время все чаще возникает необходимость в переводе документов для различных целей. В Новосибирске есть множество агентств и переводчиков, специализирующихся на качественных переводах документов. Однако, помимо перевода, часто требуется также апостиль, который удостоверяет подлинность документа за рубежом.
Получить апостиль в Новосибирске — это несложно, если обратиться к профессионалам. Многие агентства, занимающиеся переводами, также предоставляют услуги по оформлению апостиля. Это удобно, т.к. можно сделать все необходимые процедуры в одном месте.
При выборе агентства для перевода документов и оформления апостиля важно обращать внимание на их опыт, репутацию и скорость выполнения заказов. Важно найти надежного партнера, который обеспечит качественный и своевременный сервис. В Новосибирске есть множество проверенных организаций, готовых помочь в оформлении всех необходимых документов для вашего спокойствия и уверенности в законности процесса.
https://salda.ws/meet/notes.php?id=12681
videosteny_vvel · March 14, 2024 at 3:44 am
производители видеостен [url=http://videosteny11.ru/]http://videosteny11.ru/[/url] .
gas engineer · March 14, 2024 at 9:57 am
So for more sustainable energy, wherever you are,
just ask Calor.
Пряжа для вязания руками купить · March 14, 2024 at 10:22 am
Excellent post. I’m facing some of these issues as well..
Фурнитура для игрушек купить · March 14, 2024 at 10:35 am
Hmm is anyone else having problems with the images on this blog loading? I’m trying to figure out if its a problem on my end or if it’s the blog. Any feed-back would be greatly appreciated.
Глаза клеевые купить · March 14, 2024 at 10:49 am
Article writing is also a fun, if you be acquainted with after that you can write or else it is complex to write.
Глаза на шайбе купить · March 14, 2024 at 11:03 am
It’s a shame you don’t have a donate button! I’d most certainly donate to this excellent blog! I suppose for now i’ll settle for book-marking and adding your RSS feed to my Google account. I look forward to fresh updates and will talk about this site with my Facebook group. Chat soon!
Phil · March 14, 2024 at 11:14 am
он должен создавать удобную рабочую среду для работников.
Feel free to surf to my website … https://rosppromtest.livejournal.com/1968.html
Глаза пришивные купить · March 14, 2024 at 11:17 am
It’s in reality a nice and helpful piece of information. I’m satisfied that you simply shared this helpful info with us. Please stay us informed like this. Thanks for sharing.
Носы для игрушек купить · March 14, 2024 at 11:32 am
Thanks to my father who told me concerning this blog, this weblog is really remarkable.
mayotmelonAnarl · March 14, 2024 at 11:41 am
Официальный мерчендайз https://mayotmelon.ru/ атрибутики и одежды Майота, где можно купить на заказ с доставкой на дом в России по низкой цене
Пищалка для игрушки купить · March 14, 2024 at 11:46 am
Have you ever considered about including a little bit more than just your articles? I mean, what you say is fundamental and all. However think of if you added some great photos or video clips to give your posts more, “pop”! Your content is excellent but with images and video clips, this website could certainly be one of the greatest in its niche. Excellent blog!
Соединительные части для игрушек купить · March 14, 2024 at 12:00 pm
Good day I am so grateful I found your blog page, I really found you by mistake, while I was searching on Bing for something else, Anyhow I am here now and would just like to say thanks a lot for a remarkable post and a all round exciting blog (I also love the theme/design), I don’t have time to browse it all at the minute but I have book-marked it and also included your RSS feeds, so when I have time I will be back to read much more, Please do keep up the awesome job.
Волосы для кукол и игрушек купить · March 14, 2024 at 12:14 pm
Hey very nice blog!! Guy .. Beautiful .. Amazing .. I will bookmark your website and take the feeds also? I am satisfied to seek out numerous useful information here in the publish, we’d like develop more strategies in this regard, thank you for sharing. . . . . .
Фурнитура для нижнего белья, бюстгальтеров купить · March 14, 2024 at 12:29 pm
Pretty great post. I simply stumbled upon your blog and wanted to mention that I have really enjoyed browsing your blog posts. In any case I’ll be subscribing in your feed and I am hoping you write again soon!
Ажурная резинка купить · March 14, 2024 at 12:43 pm
Hi, I do believe this is an excellent web site. I stumbledupon it 😉 I will return once again since I book-marked it. Money and freedom is the best way to change, may you be rich and continue to help other people.
Ажурная резинка 10 мм купить · March 14, 2024 at 12:57 pm
Way cool! Some very valid points! I appreciate you writing this article and also the rest of the site is very good.
Kprf121.ru · March 14, 2024 at 1:43 pm
I’m extremely impressed with your writing skills as well as with the layout on your weblog.
Is this a paid theme or did you modify it yourself? Anyway
keep up the excellent quality writing, it is rare to see a nice blog like this
one these days.
onexbetfrance · March 14, 2024 at 2:45 pm
[url=https://www.1-xbet-france.com]1-xbet-france.com[/url]
Working 1xbet reproduce for entering the official website of the bookmaker. Practise it to list with 1xBet, make bonuses and station online bets.
http://1-xbet-france.com
Eugenia · March 14, 2024 at 4:02 pm
On Fiverr, Pakistani Google Certified Digital Marketer Husnain Malik is a competent Seo qualified.
Here is my webpage https://qna.lrmer.com/index.php?qa=902787&qa_1=where-find-every-thing-there-learn-about-%EB%82%A8%EC%9E%90%EB%8F%84%EC%9A%B0%EB%AF%B8-simple-steps
HowardNep · March 14, 2024 at 4:24 pm
aviator bet malawi: aviator bet malawi – aviator betting game
пошив одежды · March 14, 2024 at 5:06 pm
Good day! I could have sworn I’ve been to this blog before but after browsing through some of the post I realized it’s new to me. Nonetheless, I’m definitely happy I found it and I’ll be bookmarking and checking back often!
JosephHab · March 14, 2024 at 7:21 pm
https://aviatorghana.pro/# aviator
aviator online [url=http://aviatormocambique.site/#]aviator mz[/url] como jogar aviator em mocambique
JamesArete · March 14, 2024 at 9:19 pm
рейтинг септиков для загородного дома
FelixGap · March 14, 2024 at 9:46 pm
Found an article that is worth reading Ц it’s really interesting! https://disqus.com/by/supercheck/about/
osteklenie_wjOi · March 14, 2024 at 10:50 pm
стеклянный фасад [url=fasadnoe-osteklenie11.ru]fasadnoe-osteklenie11.ru[/url] .
onexbetfrance · March 14, 2024 at 11:57 pm
[url=https://www.1-xbet-france.com]1-xbet-france.com[/url]
Working 1xbet mirror image looking for entering the true website of the bookmaker. Practise it to list with 1xBet, pick up bonuses and all right online bets.
http://1-xbet-france.com
win1wineTow · March 15, 2024 at 12:28 am
Рекомендую каждому настоящий сайт [url=https://1win-30.ru/]1win[/url]
MichaelHal · March 15, 2024 at 12:34 am
Opened up interesting material Р I recommend sharing this discovery http://layout.bestbb.ru/viewtopic.php?id=285#p499
Winn1ytqdup · March 15, 2024 at 12:42 am
Лучшее казино находится тут [url=https://1win-27.ru/]1win[/url]
1win7vindup · March 15, 2024 at 12:46 am
Лучший беттинговый сайт можно найти только тут [url=https://1win-28.ru/]1win[/url]
winwinp[Ihoqebuqeqoprywu,2,5]штцштмшт · March 15, 2024 at 12:53 am
Настоящий сайт 1вин найти можно здесь [url=https://1win-29.ru/]1win[/url]. Рекомендую!
onexbetfrance · March 15, 2024 at 1:48 am
[url=https://1-xbet-france.com]https://1-xbet-france.com[/url]
Working 1xbet mirror for entering the true website of the bookmaker. Usage it to take with 1xBet, receive bonuses and all right online bets.
1-xbet-france.com
Rosetta · March 15, 2024 at 2:58 am
Fans can engross themselves in the season by betting on individual games, player functionality, or season-lengthy final results.
Also visit my web-site; http://Www.Abbagoldlive.com/%EB%A8%B9%ED%8A%80%EA%B2%80%EC%A6%9D-%EC%95%88%EC%A0%84%ED%95%9C-%ED%86%A0%ED%86%A0%EC%B9%9C%EA%B5%AC%EB%A5%BC-%EC%B0%BE%EB%8A%94-%EB%B0%A9%EB%B2%95/
Blaine · March 15, 2024 at 5:36 am
Do you have knowledge functioning in the healthcare or healthcare fields?
my website – https://blog.naver.com/misozin_/223344908441
Kala · March 15, 2024 at 5:40 am
Kudos! Excellent stuff!
Here is my website; https://www.Pearltrees.com/ggoit/item575980114
Louisitard · March 15, 2024 at 6:21 am
https://cleaning24moscow.ru/
Kennethrat · March 15, 2024 at 6:33 am
В наше время все чаще возникает необходимость в переводе документов для различных целей. В Новосибирске есть множество агентств и переводчиков, специализирующихся на качественных переводах документов. Однако, помимо перевода, часто требуется также апостиль, который удостоверяет подлинность документа за рубежом.
Получить апостиль в Новосибирске — это несложно, если обратиться к профессионалам. Многие агентства, занимающиеся переводами, также предоставляют услуги по оформлению апостиля. Это удобно, т.к. можно сделать все необходимые процедуры в одном месте.
При выборе агентства для перевода документов и оформления апостиля важно обращать внимание на их опыт, репутацию и скорость выполнения заказов. Важно найти надежного партнера, который обеспечит качественный и своевременный сервис. В Новосибирске есть множество проверенных организаций, готовых помочь в оформлении всех необходимых документов для вашего спокойствия и уверенности в законности процесса.
https://salda.ws/meet/notes.php?id=12681
Brianna · March 15, 2024 at 7:18 am
If your prize is more than $600, youll need to also fill out and send a claim form.
my site https://cream-lemon-h6hp2g.mystrikingly.com/blog/04f353ba720
Sheldoncrync · March 15, 2024 at 7:22 am
проверенные авто из кореи https://avtodom63.ru/
Henrysteld · March 15, 2024 at 8:17 am
zestoretic
penis · March 15, 2024 at 9:03 am
Thiѕ excellent website really has aall of the informatіon I needeԁ concerning this subect ɑnd didn’t know who to ask.
PhilipBug · March 15, 2024 at 11:09 am
top 10 pharmacies in india: Best Indian pharmacy – pharmacy website india indianpharm.store
Win1wintp[Ihoqebuqeqoprywu,2,5]штцштмшт · March 15, 2024 at 12:58 pm
Настоящий сайт 1вин находится здесь [url=https://1win-31.ru/]1win[/url]. Рекомендую!
1win8vindup · March 15, 2024 at 12:59 pm
Рекомендую лучший беттинговый сайт [url=https://1win-32.ru/]1win[/url]
Winn1ytrdup · March 15, 2024 at 1:00 pm
Лучшее казино и БК находятся в [url=https://1win-33.ru/]1win[/url]
Car insurance companies · March 15, 2024 at 1:21 pm
Car insurance companies insurance is essential,
but it doesn’t need to be actually complicated.
Seek policies that are understandable.
Princetonsteld · March 15, 2024 at 1:44 pm
PЕЇjДЌka 400000 KДЌ
RichardIdold · March 15, 2024 at 2:19 pm
buying from online mexican pharmacy: mexican pharmacy – mexican online pharmacies prescription drugs mexicanpharm.shop
Malinda · March 15, 2024 at 2:50 pm
90% of the general offer will be available during the pre-sale. users have the opportunity to raise https://bitcoin-dogs.io/, trade them and participate in races with own cryptocurrency dogs in mode “play to earn”.
Marcussmede · March 15, 2024 at 4:44 pm
canadian family pharmacy [url=http://canadianpharmlk.com/#]Best Canadian online pharmacy[/url] best canadian online pharmacy canadianpharm.store
oborudovan_fyKn · March 15, 2024 at 6:08 pm
оборудование для переговорных комнат [url=https://oborudovanie-peregovornyh-komnat11.ru]https://oborudovanie-peregovornyh-komnat11.ru[/url] .
PhilipBug · March 15, 2024 at 8:05 pm
mexican border pharmacies shipping to usa: Mexico pharmacy price list – mexican online pharmacies prescription drugs mexicanpharm.shop
cheap corporate secretarial · March 15, 2024 at 9:26 pm
I read this piece of writing completely on the topic of the difference of most up-to-date
and preceding technologies, it’s amazing article.
koh · March 15, 2024 at 10:13 pm
Excellent post! We will be linking to this particularly great post on our website.
Keep up the good writing.
Synthwave · March 15, 2024 at 11:33 pm
This is a topic that’s near to my heart… Take care! Exactly where are your contact details though?
win1winrTow · March 16, 2024 at 1:00 am
Рекомендую каждому букмекерскую контору [url=https://1win-34.ru/]1win[/url]
https://www.youtube.com/@coinunivers7 · March 16, 2024 at 1:24 am
Actually no matter if someone doesn’t know then its up to other viewers
that they will assist, so here it takes place.
Kay · March 16, 2024 at 3:20 am
Hi to every one, since I am truly eager of reading this web site’s post to be updated on a regular basis. It contains good material.
Feel free to visit my blog … https://Betflik-888.bet/
PhilipBug · March 16, 2024 at 4:16 am
buying prescription drugs in mexico: Medicines Mexico – mexican online pharmacies prescription drugs mexicanpharm.shop
Daniela · March 16, 2024 at 4:52 am
These have been social retreats for the males, as females were By no means allowed previous the front door.
my blog post; https://Sabrinacharpinel.Com.br/2016/01/12/blog-post-title-2/
Marcussmede · March 16, 2024 at 4:59 am
canadian online pharmacy reviews [url=https://canadianpharmlk.shop/#]Canada pharmacy[/url] canadian pharmacy checker canadianpharm.store
RichardIdold · March 16, 2024 at 5:50 am
Online medicine order: cheapest online pharmacy – cheapest online pharmacy india indianpharm.store
Louis · March 16, 2024 at 5:55 am
The gas station and comfort store is significantly less than 20 miles away from Walt Disney Globe Resort, Universal Orlando and SeaWorld Orlando in neighboring Orange County.
Feel free to surf to my page; https://cityofkozani.gov.gr/web/bioglassmcipartner/home/-/blogs/mci-indonesia-mlm-terbaik-indonesia?_33_redirect=http://bumdino44768532.Wikidot.com/blog:9
ArnoldLen · March 16, 2024 at 6:07 am
Приветствую, друзья! Сегодня хочу поделиться своими впечатлениями о [url=http://madou6klgd.ru/]пинап[/url]. Это место, где удовольствие сочетаются в единственном локации. Здесь я обнаруживаю колоссальный выбор забав. Начиная от классических машин и завершая реальными поединками с реальными дилерами. Бонусы и рекламные предложения приятно заинтересовали, а уровень сервиса на наилучшем уровне. Вчера повезло получить большой выигрыш, и я уже не могу подождать возвращения сюда. Порекомендовал бы всем попробовать свою удачу в pin up!
Wallace · March 16, 2024 at 7:03 am
In Michigan, a broad spectrum of legal gambling options caters to several interests and preferences.
Here is my web-site: https://misozin.tistory.com/11
VictorLaf · March 16, 2024 at 8:05 am
https://moskva-cleaning.ru/
homepage · March 16, 2024 at 8:09 am
Aw, tһis waѕ an extremely good post. Spending some time
and actual effоrt to make a superb article ƅut what can I say I procrastinate
a whole lot and never seem to get anything done.
iptv legal · March 16, 2024 at 8:10 am
We are a group of volunteers and starting a new scheme in our community.
Your web site provided us with valuable information to work on.
You have done a formidable job and our entire community will be grateful to you.
GeorgeMuh · March 16, 2024 at 8:28 am
Подробнее здесь [url=https://xn—-jtbjfcbdfr0afji4m.xn--p1ai]электрик томск[/url]
Angelotrids · March 16, 2024 at 11:05 am
https://ekspert-komforta.ru/
1win9vindup · March 16, 2024 at 11:40 am
Рекомендую лучший беттинг сайт [url=https://1win-36.ru/]1win[/url]
Win1winto[Ihoqebuqeqoprywu,2,5]штцштмшт · March 16, 2024 at 11:44 am
Оригинальный сайт 1вин находится здесь [url=https://1win-35.ru/]1win[/url]. Рекомендую!
Winn1ytudup · March 16, 2024 at 11:47 am
Лучшее казино и БК можете найти в [url=https://1win-37.ru/]1win[/url]
카지노사이트 · March 16, 2024 at 12:00 pm
Very good write-up. Idefinitely love this site.
Sticfk with it!
Also vist my page; 카지노사이트
GeorgeMuh · March 16, 2024 at 12:21 pm
продолжить [url=https://xn—-jtbjfcbdfr0afji4m.xn--p1ai]электрик томск[/url]
Jasondum · March 16, 2024 at 12:57 pm
https://calculatortiktok.com/
Rebecca · March 16, 2024 at 1:09 pm
With acceptable licenses, casino-based games are legal in Australia on land.
Stop by my webpage; https://Yoiggi.com/%ED%8C%8C%EC%9B%8C%EB%B3%BC/
PhilipBug · March 16, 2024 at 1:38 pm
canadian neighbor pharmacy: My Canadian pharmacy – canadian pharmacy world reviews canadianpharm.store
강남피쉬안마 · March 16, 2024 at 1:44 pm
I truly love your blog.. Great colors & theme.
Did you build this site yourself? Please reply back as
I’m wanting to create my very own blog and would love to know where you got this from or what the theme is named.
Thanks!
Brock · March 16, 2024 at 6:32 pm
Выкуп подержанных автомобилей возможен даже для их нахождении под банковским залогом либо при наличии травм в результате Срочный.
Also visit my page; https://autoarena.by/vykup-avto-posle-dtp/
diplom_qqoa · March 16, 2024 at 7:16 pm
купить диплом о высшем образовании [url=https://saksx-diploms24.com/]https://saksx-diploms24.com/[/url] .
Dane · March 16, 2024 at 8:59 pm
For more information about the draw, select the ‘Prize Breakdown’ hyperlink.
Feel free to surf to my webpage: http://Dsigno.in/2021/07/26/hello-world/
dewagacor · March 16, 2024 at 9:39 pm
My spouse and I stumbled over here by a different page and thought I might as well
check things out. I like what I see so now i am following you.
Look forward to looking at your web page repeatedly.
PhilipBug · March 16, 2024 at 10:31 pm
pharmacy com canada: International Pharmacy delivery – best canadian pharmacy online canadianpharm.store
HenryBaw · March 16, 2024 at 10:52 pm
Came across a unique piece – be sure to check it out https://www.veoh.com/myprofile/chatruletka
Marcussmede · March 16, 2024 at 11:36 pm
indian pharmacy [url=https://indianpharm24.shop/#]Online medicine home delivery[/url] india pharmacy mail order indianpharm.store
win1winiTow · March 16, 2024 at 11:48 pm
Рекомендую каждому букмекерскую контору в России [url=https://1win-38.ru/]1win[/url]
RobertFip · March 17, 2024 at 12:43 am
Продолжение [url=https://t.me/xxkriptonxx]Асик[/url]
RichardIdold · March 17, 2024 at 1:06 am
canada rx pharmacy: Canadian pharmacy prices – canadian pharmacy sarasota canadianpharm.store
Online Visa Application Form · March 17, 2024 at 2:05 am
Wow that was strange. I just wrote an very long comment but after I clicked submit my
comment didn’t appear. Grrrr… well I’m
not writing all that over again. Anyway, just wanted to
say excellent blog!
* * * Apple iPhone 15 Free: http://www.tgvtec.com.br/upload/go.php * * * hs=6f6111ed7ac81bda2d4ea62e12f87c5c* · March 17, 2024 at 2:35 am
imo65o
* * * Apple iPhone 15 Free * * * hs=6f6111ed7ac81bda2d4ea62e12f87c5c* · March 17, 2024 at 2:36 am
jqiyx2
Michele · March 17, 2024 at 2:37 am
You may perhaps be asked about your household, marital status and what you do in your spare time.
Feel free to surf to my web-site … http://www.stes.tyc.edu.tw/xoops/modules/profile/userinfo.php?uid=983811
Nathansteld · March 17, 2024 at 3:18 am
mestinon medication
Drusilla · March 17, 2024 at 3:37 am
Heroes from your favorite XXX comics for an abstinence-only education believe that all. Rising female southern black XXX stuff for your sex games site has it all. Evolution and female forms-spermatozoa and egg. Besides the famous for female rapper in the world and enjoy it or even just a few. Etc do not include your child has explicit or upsetting content online adult games the world. She’s got a great backdoor position the ultimate online adult games the world. Jennifer Lawrence’s sexy puzzles for adults porn dress up games rpg sex games library that’s fast. By providing high-quality live sex cam channel on CAM4 is devoted to porn. The site features cam girls do it on themselves to the seemingly perfect. They found 33 projects promoting pleasure along with female members of her perfect pair. Semen contains to penetrate the female tighter and thrust faster and it is. Everyone’s human male to choose the posture in which to urinate while. Harper Douglas penis applies to many intromittent organs but not to cum while watching 18 year. This year Pornhub’s year and these seasoned nymphos and most don’t stick with it. Yab-yum with a society including self-generated child sexual abuse content a 77 increase on the receiving partner.
EdwardTeasp · March 17, 2024 at 4:04 am
homesimprovement.net
카지노사이트 · March 17, 2024 at 5:00 am
I know this web site offers quality dependent articles and additional
stuff, is there any otgher web site which guves sucxh data inn quality?
My web site :: 카지노사이트
Myrtle · March 17, 2024 at 5:27 am
To recap, Fortunate Block offers a 200% deposit bonus, anonymous accounts, and immediate payouts.
Here is my blog post; https://spoforesee.com/%ED%86%A0%ED%86%A0%EC%82%AC%EC%9D%B4%ED%8A%B8-%EC%88%9C%EC%9C%84-%EC%B6%94%EC%B2%9C-%EB%A6%AC%EC%8A%A4%ED%8A%B8/
ANTIBAN-PRO · March 17, 2024 at 5:28 am
Concerned about the security of your Instagram account? Don’t wait until it’s too late – take proactive steps to safeguard your account with Antiban Pro. Our platform offers valuable resources and guidance to help you prevent hacking attempts and keep your account secure.
With Antiban Pro, you can access expert advice on strengthening your account security measures and identifying potential vulnerabilities. From setting up two-factor authentication to recognizing phishing scams, we equip you with the knowledge and tools you need to protect your Instagram account effectively.
Why choose Antiban Pro? We prioritize user education and empowerment, arming you with the necessary information to defend against hacking attempts. Our proactive approach to account security ensures that you can enjoy peace of mind while engaging with the Instagram community.
Don’t wait for hackers to target your account – take proactive steps to protect it with Antiban Pro. Strengthen your account security and stay one step ahead of potential threats. Protect your digital assets and maintain control over your Instagram account with Antiban Pro today!
Antiban.pro – [url=https://antiban.pro/en/]how to recover hacked instagram account[/url]
Geraldbic · March 17, 2024 at 5:54 am
california-invest.com
Ardis · March 17, 2024 at 6:22 am
https://Stadtbranche.de/thema-https://doodleordie.com/profile/sergiowestmacot
PhilipBug · March 17, 2024 at 6:43 am
mexico drug stores pharmacies: Mexico pharmacy online – mexican online pharmacies prescription drugs mexicanpharm.shop
archive online · March 17, 2024 at 7:19 am
archive online
DouglasIcolo · March 17, 2024 at 7:30 am
скачать леон на айфон
Kendricksteld · March 17, 2024 at 10:12 am
besГёk
RobertFip · March 17, 2024 at 10:35 am
ссылка на сайт [url=https://t.me/xxkriptonxx]ASIC[/url]
Larryper · March 17, 2024 at 12:44 pm
http://shurum-burum.ru/
PhilipBug · March 17, 2024 at 2:44 pm
pharmacy website india: indian pharmacy – reputable indian pharmacies indianpharm.store
Antiban-Pro · March 17, 2024 at 3:15 pm
Feeling overwhelmed by the constant buzz of social media? It might be time to take a break and deactivate your Instagram account. Antiban Pro offers a safe and convenient solution to temporarily deactivate your account, giving you the breathing room you need.
Our platform streamlines the deactivation process, ensuring that your account is temporarily suspended without any complications. Whether you need a short break or want to step back from the digital world for a while, Antiban Pro has got you covered.
Why choose Antiban Pro? We prioritize user experience and security, ensuring that your personal information remains protected throughout the deactivation period. Your privacy is our top priority, and we take every precaution to safeguard your data.
Take control of your digital well-being and reclaim your time with Antiban Pro. Temporarily deactivate your Instagram account and enjoy a much-needed respite from the endless scroll. When you’re ready to return, simply reactivate your account hassle-free.
Don’t let social media overwhelm you. Trust Antiban Pro to help you take a step back and prioritize your mental health. Deactivate your Instagram account today and embrace the peace of mind you deserve!
Antiban.pro – [url=https://antiban.pro/en/]instagram account verification issue[/url]
Kim · March 17, 2024 at 4:04 pm
As a foreigner, having a job present to teach a specialty aside from English is unlikely.
my web-site … https://hellobox2.hellobox.co/6672727
Georgedrubs · March 17, 2024 at 5:08 pm
Discovered a unique article – recommended to acquaint yourself! https://www.empowher.com/users/worksale
ArthurSeipt · March 17, 2024 at 5:37 pm
indiana-daily.com
Chase · March 17, 2024 at 6:38 pm
Facebook instagramming The project is extensive marketing plan, https://poodl-inu.io/ , which will be able to cover various platforms social networks, and cryptopublications, in order raise information about the dog-themed coin.
Marcussmede · March 17, 2024 at 6:55 pm
pharmacy website india [url=https://indianpharm24.shop/#]Online India pharmacy[/url] indian pharmacy online indianpharm.store
Dostavka_nzma · March 17, 2024 at 7:14 pm
стоимость транзит груз китай узбекистан россия [url=https://perevozka-iz-kitaya.ru]https://perevozka-iz-kitaya.ru[/url] .
Winn1ytydup · March 17, 2024 at 7:32 pm
Лучшее казино и БК находится на [url=https://1win-40.ru/]1win[/url]
1win10vindup · March 17, 2024 at 7:44 pm
Рекомендую лучший беттинг сайт и казино [url=https://1win-41.ru/]1win[/url]
카지노사이트 · March 17, 2024 at 7:55 pm
Heyaa excellent blog! Does running a blog such as this require a massive amount work?
I have virtually no unbderstanding of computer programming however I was hoping
to start my own blog in the neear future. Anyway, should you have any recommendfations or tips ffor new blog osners please share.
I understand this iss off topic however I imply wanted to ask.
Kudos!
Here is my site: 카지노사이트
LouisHor · March 17, 2024 at 8:12 pm
real-apartment.com
RichardIdold · March 17, 2024 at 8:26 pm
mexican rx online: order online from a Mexican pharmacy – reputable mexican pharmacies online mexicanpharm.shop
Tomoko · March 17, 2024 at 8:41 pm
Nicely put. Thanks.
My website … https://Blackjackarea.com/%EC%86%8C%EC%95%A1%EB%8C%80%EC%B6%9C-%EC%89%BD%EA%B3%A0-%EB%B9%A0%EB%A5%B8-%ED%95%B4%EA%B2%B0%EC%82%AC-%EC%9D%B4%EC%A7%80%EB%A1%A0/
PhilipBug · March 17, 2024 at 11:15 pm
mexican pharmaceuticals online: mexican mail order pharmacies – medicine in mexico pharmacies mexicanpharm.shop
Margene · March 18, 2024 at 12:23 am
https://Locademy.co/blog/index.php?entryid=60526
win1winuTow · March 18, 2024 at 12:33 am
Рекомендую лучшую букмекерскую контору в России [url=https://1win-43.ru/]1win[/url]
Забудьте о бумажной волоките с Zaim-Fin! · March 18, 2024 at 2:50 am
Привет, друзья! Давайте поговорим о том, как использовать портал zaim-fin.ru для своих нужд. Этот портал предоставляет удобную платформу для поиска и сравнения условий займов от различных МФО. Вам нужно всего лишь зайти на сайт, выбрать нужную сумму и срок займа, а затем ознакомиться с предложениями от различных компаний. Помимо этого, на портале вы найдете полезные советы о том, как выбрать подходящий займ и как правильно распорядиться полученными средствами. Так что не стесняйтесь использовать zaim-fin.ru, чтобы найти оптимальное финансовое решение для ваших потребностей!
Fannie · March 18, 2024 at 7:16 am
You definitely made your point!
Feel free to visit my web blog – https://Independent-Orange-H1J120.Mystrikingly.com/blog/0d1af1cc036
Jamesmaw · March 18, 2024 at 8:08 am
https://grandolavanderia.ru/
WayneNug · March 18, 2024 at 9:32 am
п»їclomid: can you drink on clomid – how can i get cheap clomid price
카지노사이트 · March 18, 2024 at 10:49 am
I’m not sure exactly why but this weblog is loading very slow for me.Is
anyone else having this problem or is it a problem
on my end? I’ll check bwck later and see if the
problem still exists.
Also visit my webpage – 카지노사이트
Williamerova · March 18, 2024 at 11:15 am
get cheap clomid no prescription: where buy generic clomid for sale – can i order clomid online
Cohensteld · March 18, 2024 at 1:31 pm
LГҐn 8000 kr
Kennethrat · March 18, 2024 at 2:14 pm
Искусство перевода с иностранных языков имеет огромное значение в современном многоязычном мире. Когда речь идет о переводе с иностранных языков, важно учитывать не только лингвистические аспекты, но и культурные и контекстуальные особенности. Профессиональные специалисты в области перевода с иностранных языков играют ключевую роль в обеспечении точности и адекватности передачи информации.
Один из важных аспектов перевода с иностранных языков – это сохранение аутентичности текста и передача его смысла на язык, на котором он будет воспринят. Это требует глубокого понимания языка, а также контекста и культурных нюансов, которые могут влиять на перевод.
Процесс перевода с иностранных языков включает в себя не только знание языков, но и искусство передачи содержания, стиля и нюансов оригинала. Это требует не только технических навыков, но и тонкого чувства языка и контекста.
Выбор профессиональной компании для перевода с иностранных языков – это гарантия качественной и точной работы. Надежные специалисты в области перевода с иностранных языков могут обеспечить точность и адекватность перевода, учитывая все особенности исходного текста.
В мире многоязычия и глобализации значение перевода с иностранных языков трудно переоценить. Это процесс, который облегчает взаимопонимание и содействует культурному обмену. Надежный и опытный переводчик способен сделать вашу информацию доступной для аудитории на любом языке. Не забывайте о важности профессионального перевода с иностранных языков в вашем международном взаимодействии. перевод с иностранных языков #перевод #иностранныязыки #профессионалывобластиперевода #глобализация
Anthonyblalp · March 18, 2024 at 3:08 pm
prednisone 30 [url=http://prednisonest.pro/#]cheapest prednisone no prescription[/url] prednisone price canada
instagram troubleshooting for locked accounts · March 18, 2024 at 4:10 pm
Attention, Instagrammers! Picture this: you wake up one morning, eager to share your latest adventures with your followers, only to find yourself locked out of your Instagram account. It’s a scenario that’s all too common in today’s digital age, leaving users feeling stranded in the vast sea of social media. But fear not – there’s a glimmer of hope on the horizon in the form of [url=https://instagram-deactivated.com/]instagram account blocked help[/url] ! This digital lifeline specializes in assisting users facing Instagram account woes, from forgotten passwords to security breaches and everything in between. With their expert guidance and streamlined processes, they’ll have you back to scrolling, posting, and sharing your life’s moments in no time. Don’t let account troubles dampen your social media experience – trust [url=https://instagram-deactivated.com/]blocked facebook[/url] to navigate the complexities of Instagram account recovery with ease!
Katrin · March 18, 2024 at 5:21 pm
You mentioned this perfectly.
my site :: https://magenta-Apple-h0n9zc.mystrikingly.com/blog/dbc7ca89faf
Williamveilk · March 18, 2024 at 5:28 pm
livingspainhome.com
Digital infidelity detection · March 18, 2024 at 5:32 pm
Hey I know this is off topic but I was wondering if you knew of any widgets I could add to my blog that automatically tweet
my newest twitter updates. I’ve been looking for a plug-in like this
for quite some time and was hoping maybe you would have some experience with something like this.
Please let me know if you run into anything. I truly enjoy reading your blog and I look forward to your new updates.
Williamerova · March 18, 2024 at 6:56 pm
purchase amoxicillin online: amoxicillin without a prescription – amoxicillin 500mg price in canada
Walterzes · March 18, 2024 at 7:17 pm
flarealestates.com
1win11vindup · March 18, 2024 at 7:28 pm
Рекомендую лучший казино и беттинг сайт [url=https://1win-45.ru/]1win[/url]
Win1ywydup · March 18, 2024 at 7:39 pm
Оригианльный сайт казино и БК находится на [url=https://1win-47.ru/]1win[/url]
Win1win2to[Ihoqebuqeqoprywu,2,5]штцштмшт · March 18, 2024 at 7:42 pm
Оригинальный сайт беттинговый 1вин находится здесь [url=https://1win-44.ru/]1win[/url]. Рекомендую!
air_efSi · March 18, 2024 at 9:23 pm
air cargo charter airlines [url=https://aircgc-lux.com/]https://aircgc-lux.com/[/url] .
paperhelp discount code · March 18, 2024 at 10:01 pm
I simply could not go away your site prior to suggesting
that I really enjoyed the usual info a person supply in your guests?
Is going to be again steadily in order to check up on new posts
WayneNug · March 18, 2024 at 11:02 pm
prednisone 12 mg: prednisone 4mg tab – prednisone 40 mg
Troy · March 19, 2024 at 1:15 am
Very lovely blowsy white peony Corsage. It is made up of a single large peony head backed with complimenting natural inexperienced leaves and foliage. Some expectant mothers could want a pin corsage if their wrists are swollen and because it leaves their fingers free to open gifts with ease. Please word that images may additionally be related and we assume no liability for product data. The mystery scribe took purpose at the company as effectively, for a “For Your Consideration” package that included Austrian chocolate merchandise bearing the picture of Empress Elisabeth: “Director Marie Kreutzer and actress Vicky Krieps have both criticized all of the merchandise and merchandising which could be offered in Austria with pictures of Empress Elisabeth before their film’s advertising crew did the identical factor to promote Corsage to awards voters,” they complained. Don’t use plastic bag packaging for storage in the closet, place your leather-based-based assortment as much as possible between cotton or linen objects so that they don’t come into contact with other steel or leather-based products if saved for too long. Always let leather dry in heat air (round 15-20 levels). Actual leather lingerie, always completely dry and effectively ventilated. Real leather is lengthened with common cleaning and care by way of soiling, signs of wear and aging harm, and the service life is considerably longer.
Williamerova · March 19, 2024 at 2:21 am
amoxicillin 500mg capsules price: amoxicillin para que sirve – amoxicillin 500mg for sale uk
Jamespsype · March 19, 2024 at 3:12 am
[url=https://cybergeniustech.com/]Predictive analytics[/url] – Mobile app development, Data warehousing
Melaine · March 19, 2024 at 3:36 am
Normally, you can anticipate to earn about $15 to $25 for common transcription.
My blog – https://turquoise-kiwi-h1b2cx.mystrikingly.com/blog/70e2715ac00
steps to take when instagram account is hacked · March 19, 2024 at 4:34 am
Imagine this: you’re on the verge of unveiling your latest masterpiece to the world on Instagram – a stunning collage of memories captured in vibrant hues. But just as you’re about to hit “post,” disaster strikes – you’re suddenly locked out of your account! Panic sets in as you frantically search for a solution. That’s when you stumble upon [url=https://instagram-deactivated.com/]assistance with hacked instagram account recovery[/url] – your knight in shining armor in the realm of social media. With their ingenious approach to account recovery and their knack for solving even the trickiest of tech troubles, they swoop in to save the day. Thanks to their expertise and a sprinkle of digital magic, you’re back in action, ready to share your masterpiece with the world. Cheers to [url=https://instagram-deactivated.com/]help with hacked instagram account recovery[/url] for turning your Instagram woes into a creative triumph!
Rodneyhak · March 19, 2024 at 6:20 am
Discovered an interesting article, I suggest you familiarize yourself https://ua.chatruletka-18.com/spy-mode
Anthonyblalp · March 19, 2024 at 6:31 am
prednisone without prescription.net [url=https://prednisonest.pro/#]3000mg prednisone[/url] prednisone 10mg prices
Jamespsype · March 19, 2024 at 7:02 am
[url=https://cybergeniustech.com/]Web analytics[/url] – Email marketing, Business intelligence
Christa · March 19, 2024 at 8:40 am
These are 10 beads created from premium silky-soft silicone, that get gradually greater as they are inserted further inside.
My homepage … https://7Prbookmarks.com/story16749387/sex-toys
Magaret · March 19, 2024 at 9:26 am
Christina is a freelance editor and contributor with Newsweek’s compact organization group.
Feel free to surf to my homepage :: https://Independent-orange-h1j120.mystrikingly.com/blog/1377f4cf314
RussellAmito · March 19, 2024 at 10:11 am
новосибирск белокуриха такси стоимость http://transfer-novosibirsk-belokurikha.ru/
Arthurnib · March 19, 2024 at 12:13 pm
boat charters in cape coral fl https://boatrent.shop/
Williamerova · March 19, 2024 at 12:29 pm
amoxicillin 500mg price in canada: amoxicillin 825 mg – amoxicillin 500 mg tablet price
Kennethrat · March 19, 2024 at 1:21 pm
Искусство перевода с иностранных языков имеет огромное значение в современном многоязычном мире. Когда речь идет о переводе с иностранных языков, важно учитывать не только лингвистические аспекты, но и культурные и контекстуальные особенности. Профессиональные специалисты в области перевода с иностранных языков играют ключевую роль в обеспечении точности и адекватности передачи информации.
Один из важных аспектов перевода с иностранных языков – это сохранение аутентичности текста и передача его смысла на язык, на котором он будет воспринят. Это требует глубокого понимания языка, а также контекста и культурных нюансов, которые могут влиять на перевод.
Процесс перевода с иностранных языков включает в себя не только знание языков, но и искусство передачи содержания, стиля и нюансов оригинала. Это требует не только технических навыков, но и тонкого чувства языка и контекста.
Выбор профессиональной компании для перевода с иностранных языков – это гарантия качественной и точной работы. Надежные специалисты в области перевода с иностранных языков могут обеспечить точность и адекватность перевода, учитывая все особенности исходного текста.
В мире многоязычия и глобализации значение перевода с иностранных языков трудно переоценить. Это процесс, который облегчает взаимопонимание и содействует культурному обмену. Надежный и опытный переводчик способен сделать вашу информацию доступной для аудитории на любом языке. Не забывайте о важности профессионального перевода с иностранных языков в вашем международном взаимодействии.
#перевод #иностранныязыки #профессионалывобластиперевода #глобализация
香港現金網娛樂城 · March 19, 2024 at 1:49 pm
If you would like to increase your knowledge only keep visiting this
web site and be updated with the newest news posted here.
WayneNug · March 19, 2024 at 5:34 pm
prednisone pack: can you drink alcohol with prednisone – no prescription prednisone canadian pharmacy
arenda_tmSr · March 19, 2024 at 5:43 pm
заказ минивэна в москве с водителем [url=https://transferfromto.ru]https://transferfromto.ru[/url] .
Vodka4kazino[Ihoqebuqeqoprywu,2,5]штцштмшт · March 19, 2024 at 10:10 pm
Оригинальный сайт можете найти здесь [url=https://vodka-cazinoo.online/]водка казино[/url].
Estebansteld · March 19, 2024 at 10:49 pm
cymbalta usa
хоккей сегодня прогноз · March 20, 2024 at 9:38 pm
хоккей сегодня прогноз
Vodka3kazdup · March 20, 2024 at 11:44 pm
Рекомендую сайт в России [url=https://vodka-cazino.fun/]водка казино[/url]
Vodka4kazdup · March 20, 2024 at 11:48 pm
Рекомендую этот крутой сайт [url=https://vodka-cazinoo.website/]водка казино[/url]
Vernondip · March 21, 2024 at 8:14 am
[url=https://kraken11tor.com/]kraken onion[/url] – kraken официальный сайт, kraken клирнет зеркало
WilliamLon · March 21, 2024 at 6:50 pm
https://blockchainreporter.net/bitcoin-btc-whale-bags-900-million-profit-after-massive-accumulation/
Anthonysteld · March 21, 2024 at 7:04 pm
pyridium 40mg
Stephenwef · March 21, 2024 at 11:01 pm
alahomemaster.com
Brucebok · March 22, 2024 at 2:28 am
cheapest pharmacy prescription drugs: online pharmacy delivery – online pharmacy no prescription needed
Vodka6kazino[Ihoqebuqeqoprywu,2,5]штцштмшт · March 22, 2024 at 10:19 pm
Официальный сайт сможете найти здесь [url=https://vodkaa-cazino.site/]водка казино[/url].
1win3winlTow · March 23, 2024 at 12:23 am
1win 1win 1win [url=https://lgrd-48.ru/]1win[/url]
FrancisPiofs · March 23, 2024 at 3:57 am
[url=https://1xbetpromo1xstavka.online/]где взять промокод 1xbet[/url] – 1хставка промокод при регистрации, промокоды 1xstavka
Jameshah · March 23, 2024 at 6:29 am
buying prescription drugs in mexico online [url=https://mexicanpharm.online/#]buying prescription drugs in mexico[/url] mexican drugstore online
Angelia · March 23, 2024 at 6:30 am
https://uktcp.uk/index.php?title=User:GloryGunther
JosephTor · March 24, 2024 at 1:07 am
[url=https://ez-ddos.com]купить ddos[/url] – заказать ддос, взлом сайта
CarlosKable · March 24, 2024 at 9:33 am
http://indianpharm.shop/# indian pharmacy paypal
Jameshah · March 24, 2024 at 9:54 pm
canadian pharmacy online [url=https://canadianpharm.guru/#] canada pharmacy[/url] canadian pharmacy service
prodvizhen_zlEi · March 25, 2024 at 4:08 am
seo аудит москва [url=http://www.prodvizhenie-sajtov15.ru/]http://www.prodvizhenie-sajtov15.ru/[/url] .
Jamesamisy · March 26, 2024 at 11:11 am
[url=http://xn—-7sbbihgb2anijhy0apq.xn--p1ai/lekarstva/ozempik-1mg-3ml/]купить оземпик +в интернет аптеке[/url] – mounjaro, тирзепатид где купить
Bernardjax · March 26, 2024 at 9:40 pm
Модные бра и лифчики это часть женской повседневности. Лучшие из них собраны тут https://incanto.com.ua/byustgaltery-bralett
Бюстгальтеры бывают разнообразные: с маленькой чашкой и большим обхватом, и умело выбранный способен доставить море комфорта и удовольствия. Не проходите мимо вопроса размеров и осуществляйте покупки в проверенном магазине. В вопросе размеров поможет опытный менеджер и размерная сетка избранного производителя. Комфортная носка находится в зависимости от качества тканей и умелого кроя и шитья – постарайтесь заметить это. Эталонный бюстгальтер не должен сдавливать, наминать кожу или оставлять следы под собой. Его роль – делать красивой грудь и придавать больше женственности женщине. И дежурные в каждом интимном гардеробе определенные бюстгальтеры – для молодых мам, бесшовные, без косточек и спейсеры.
Пришивные магнитные кнопки купить · March 27, 2024 at 9:48 pm
I couldn’t resist commenting. Very well written!
Пришивные магнитные кнопки купить · March 27, 2024 at 9:57 pm
WOW just what I was searching for. Came here by searching for %keyword%
Haroldalgor · March 28, 2024 at 5:38 am
https://zelpgo.ru
RobinDaymn · March 28, 2024 at 7:48 pm
Казино с пополнением с Киви
Cliftonten · March 29, 2024 at 3:43 am
travelusanews.com
Lizzie · March 29, 2024 at 1:18 pm
The free of charge spins are only out there to use on the Golden Buffalo slot game, and they have a maximum win cap of $50.
Here is my site – https://loannews.finance.blog/2024/03/14/popularity-and-verification-method-of-baccaratsite/
Timothyduaks · March 29, 2024 at 7:35 pm
getusainvest.com
FortuneTiger2dup · March 31, 2024 at 12:52 am
Visite o site real do jogo [url=https://fortune-tiger1.net/]Fortune Tiger[/url]
1xbet971Teedo · March 31, 2024 at 2:23 am
Предлагаю топовую в своем роде Букмекерскую контору [url=https://1xbet-19.ru/]1xbet[/url]
Lutherbounc · March 31, 2024 at 5:00 am
http://viagragood.ru/v-50-let-normalnaya-erekciya.html
1xbet969Teedo · March 31, 2024 at 1:08 pm
Знакомлю с топовой в своем роде Букмекерской конторой [url=https://1xbet-22.ru/]1xbet[/url]
FortuneTiger96dup · March 31, 2024 at 11:49 pm
Aqui está o site original em [url=https://fortune-tiger1.art/]Fortune Tiger[/url]
FortuneTiger4dup · March 31, 2024 at 11:50 pm
Você pode encontrar o site original aqui [url=https://fortune-tiger1.click/]Fortune Tiger[/url]
1xbetFoin868#genn6ick[Vevpejuqiquvkeqk,2,5] · April 1, 2024 at 7:01 am
На мой взгляд – лучшая Букмекерская контора [url=https://1xbet-29.ru/]1xbet[/url]
1xbet963Teedo · April 1, 2024 at 9:46 pm
Превосходная Букмекерская контора [url=https://1xbet-34.ru/]1xbet[/url]
xxx · April 1, 2024 at 9:51 pm
Thiѕ piece of writіng will assist the internet visitors for building up new weblog or evеn a blogg from stawrt
tο end. https://Dosen.Stikesbanyuwangi.AC.Id/dokter/?kuliah=jamuslot
EdwardDob · April 2, 2024 at 10:09 am
canadian mail order pharmacy [url=http://canadianpharmacy24.store/#]canadapharmacyonline legit[/url] canadian pharmacy uk delivery
Edwardunemi · April 2, 2024 at 3:24 pm
prednisone without prescription 10mg: 5 prednisone in mexico – how to buy prednisone online
StevenUnina · April 3, 2024 at 8:12 am
замена венцов
Cheapest SR22 insurance · April 3, 2024 at 11:47 am
The examples you offered made every little thing a great deal
more clear. It is actually noticeable you have actually performed your study.
Maintain up the magnum opus!
Look at my site; Cheapest SR22 insurance
1xbetFoin858#genn6ick[Vevpejuqiquvkeqk,2,5] · April 3, 2024 at 10:55 pm
Самая надежная Букмекерская контора №1 [url=https://1xbet-48.ru/]1xbet[/url]
DavidPen · April 3, 2024 at 11:02 pm
price of amoxicillin without insurance [url=http://amoxilall.shop/#]buy amoxicillin 500mg online[/url] amoxicillin 825 mg
товар в 3d · April 6, 2024 at 1:08 pm
Виртуальная и дополненная реальность в маркетинге arigami.tech
Если Вы хотели найти [url=https://arigami.tech/augmented_reality]ar контент[/url] в интернете, то мы можем Вам помочь. Наше предложение актуально для областей: ремонт, ретейл, мебель, оборудование, электроника, товары для сада и дачи и другие. Если Вам сложно определиться, что конкретно требуется Вашему бизнесу, то оформите заявку на сайте arigami.tech и наш специалист Вам перезвонит и ответит на все вопросы. Наш контактный телефон +7(925)077-93-94 или пишите на вотс ап. Будем рады удачному партнерству с Вами!
DanielMoG · April 7, 2024 at 12:51 am
Kamagra 100mg price [url=https://kamagraiq.com/#]Kamagra Oral Jelly Price[/url] super kamagra
KevinNaf · April 7, 2024 at 2:16 am
https://www.libertaddigital.com/chic/entretenimiento/2016-09-21/fan-bingbing-las-increibles-cifras-alrededor-de-la-mayor-estrella-china-1276582941/
DanielMoG · April 7, 2024 at 3:30 pm
buy Viagra online [url=http://sildenafiliq.xyz/#]best price on viagra[/url] over the counter sildenafil
Larryvople · April 8, 2024 at 2:43 pm
legit canadian pharmacy online [url=http://canadianpharmgrx.com/#]My Canadian pharmacy[/url] canadian pharmacy king
FortuneTiger10dup · April 8, 2024 at 11:08 pm
Lucro ao jogar o jogo [url=https://fortune-tiger-2.top/]Fortune Tiger[/url]
Walteredini · April 9, 2024 at 7:51 am
https://jeneri.ru/beg-i-potenciya.html
Larryvople · April 9, 2024 at 10:45 am
buy prescription drugs from canada cheap [url=http://canadianpharmgrx.com/#]Certified Canadian pharmacies[/url] best canadian pharmacy
WilliamHix · April 9, 2024 at 1:43 pm
Found an enthralling read that I’d recommend Ц it’s truly fascinating https://rsn360.ru/blogs/136/«ав¤зывай-новые-отношени¤-знакомства-с-девушками-в-сети
Williamnop · April 9, 2024 at 7:24 pm
greenhousebali.com
BrettDut · April 10, 2024 at 2:36 am
отели москвы https://otelivmoskva.ru/oteli-i-gostinicy-v-moskve/
заказать вывоз мусора из частного сектора · April 10, 2024 at 2:04 pm
Заказ мусорного контейнера ecologia-t.ru
По поиску [url=https://www.ecologia-t.ru/info/vivoz_musora_zheleznodorozniy/]вывоз строительного мусора железнодорожный[/url] Вы на нужном пути. Вывозим отходы разного вида: смешанные отходы, твердые коммунальные отходы, металлолом, грунт, снег и другие. Также проводим работу круглосуточно, без выходных и даже в праздничные дни. Делаем как одноразовые вывозы, так и ежедневные по конкретным дням или часам, в зависимости от планов заказчика. Подходим к любой проблеме персонально, чтобы реализовывать работу супер ответственно.
глаз бога телеграмм бесплатно · April 11, 2024 at 2:36 am
Good day! Do you know if they make any plugins to protect against hackers? I’m kinda paranoid about losing everything I’ve worked hard on. Any recommendations?
1winFoin838#genn6ick[Vevpejuqiquvkeqk,2,5] · April 11, 2024 at 4:06 pm
Выбрал для себя потрясающую Букмекерскую контору [url=https://1xbet-67.ru/]1xbet[/url]
boga.cc · April 12, 2024 at 7:13 am
Im not that much of a online reader to be honest but your blogs really nice, keep it up! I’ll go ahead and bookmark your site to come back in the future. Cheers
boga.cc · April 12, 2024 at 7:22 am
I am regular reader, how are you everybody? This article posted at this website is truly pleasant.
boga.cc · April 12, 2024 at 7:32 am
Awesome blog! Do you have any tips and hints for aspiring writers? I’m planning to start my own site soon but I’m a little lost on everything. Would you advise starting with a free platform like WordPress or go for a paid option? There are so many choices out there that I’m totally confused .. Any suggestions? Bless you!
boga.cc · April 12, 2024 at 7:42 am
Hi there, I enjoy reading all of your article. I like to write a little comment to support you.
boga.cc · April 12, 2024 at 7:52 am
Thank you for the auspicious writeup. It in fact was a amusement account it. Look advanced to far added agreeable from you! By the way, how can we communicate?
boga.cc · April 12, 2024 at 8:02 am
Hey very interesting blog!
boga.cc · April 12, 2024 at 8:13 am
Does your website have a contact page? I’m having problems locating it but, I’d like to send you an e-mail. I’ve got some suggestions for your blog you might be interested in hearing. Either way, great website and I look forward to seeing it develop over time.
boga.cc · April 12, 2024 at 8:22 am
Woah! I’m really loving the template/theme of this website. It’s simple, yet effective. A lot of times it’s very difficult to get that “perfect balance” between superb usability and visual appeal. I must say that you’ve done a awesome job with this. Additionally, the blog loads extremely fast for me on Safari. Outstanding Blog!
boga.cc · April 12, 2024 at 8:32 am
Hi everyone, it’s my first visit at this web site, and piece of writing is truly fruitful for me, keep up posting these articles.
boga.cc · April 12, 2024 at 8:42 am
Today, I went to the beach with my kids. I found a sea shell and gave it to my 4 year old daughter and said “You can hear the ocean if you put this to your ear.” She put the shell to her ear and screamed. There was a hermit crab inside and it pinched her ear. She never wants to go back! LoL I know this is entirely off topic but I had to tell someone!
boga.cc · April 12, 2024 at 8:52 am
Hello! I could have sworn I’ve been to this website before but after going through a few of the posts I realized it’s new to me. Nonetheless, I’m definitely pleased I found it and I’ll be bookmarking it and checking back frequently!
boga.cc · April 12, 2024 at 9:03 am
Hi mates, its impressive piece of writing regarding educationand completely explained, keep it up all the time.
boga.cc · April 12, 2024 at 9:14 am
Hi there, I found your web site via Google at the same time as searching for a similar matter, your web site got here up, it seems good. I have bookmarked it in my google bookmarks.
boga.cc · April 12, 2024 at 9:24 am
Hi there to all, how is everything, I think every one is getting more from this site, and your views are pleasant for new users.
boga.cc · April 12, 2024 at 9:35 am
An impressive share! I have just forwarded this onto a colleague who was doing a little research on this. And he in fact bought me lunch because I found it for him… lol. So let me reword this…. Thank YOU for the meal!! But yeah, thanx for spending time to discuss this topic here on your internet site.
Эластичное кружево 150-170 мм купить · April 12, 2024 at 9:45 am
An impressive share! I have just forwarded this onto a colleague who had been doing a little research on this. And he in fact bought me breakfast simply because I found it for him… lol. So let me reword this…. Thank YOU for the meal!! But yeah, thanx for spending the time to discuss this topic here on your web page.
Эластичное кружево 15-50 мм купить · April 12, 2024 at 9:56 am
Hola! I’ve been following your site for a while now and finally got the bravery to go ahead and give you a shout out from Austin Tx! Just wanted to mention keep up the great job!
RobinDaymn · April 12, 2024 at 10:09 am
Казино с выводом на Qiwi
Ronaldfrumb · April 13, 2024 at 8:09 am
usainvesttoday.com
Brianaborm · April 13, 2024 at 8:38 am
italycarsrental.com
JeromeVem · April 13, 2024 at 3:51 pm
200 mg doxycycline [url=https://doxycyclinest.pro/#]100mg doxycycline[/url] buy cheap doxycycline
feFFsdfdup · April 13, 2024 at 11:20 pm
Переходим все сюда [url=https://kolgadm.ru/]1win[/url]
Jamesidexy · April 14, 2024 at 5:59 am
can i buy generic clomid without rx [url=https://clomida.pro/#]where to buy clomid pill[/url] clomid online
Augustussteld · April 14, 2024 at 11:41 am
how to purchase celebrex 100 mg
RobertGribe · April 14, 2024 at 1:26 pm
перевод документов
1win927Teedo · April 14, 2024 at 10:00 pm
Лучшая Букмекерская контора, советую [url=https://1xbet-89.ru/]1xbet[/url]
JamesSenny · April 15, 2024 at 3:48 am
payusainvest.com
Douglasquato · April 15, 2024 at 5:19 am
south-columbia.com
Noelsteld · April 15, 2024 at 5:41 am
voisit katsoa täältä
RylieStook · April 15, 2024 at 10:36 am
Understanding the intricacies of web-based schools located in Alaska can really be hard, specifically if you're unfamiliar to the concept. I, too, confronted these doubts but have found that these digital platforms deliver top-notch, in-depth educational journey that matches traditional brick-and-mortar institutions.
From the sturdy landscapes of Juneau to the active ambiance of Anchorage, Alaska's online schools provide myriad learning opportunities that can be adaptable and handy. The snow-filled winters no longer hinder one's ability to obtain knowledge. Up-to-date technology rendered it possible to follow knowledge from the warmth and relaxation of your house.
Adaptability is a impressive benefit. You can tailor your schedules in line with your responsibilities, that is very useful for employees or those with domestic duties. Additionally, the courses given are broad, addressing a wide array of subjects. Including introductory basics to advanced specialties, there's something interesting for everyone.
Alaska's online schools boast qualified teachers, engaging learning techniques, and encouraging peer networks, resulting in a fulfilling rewarding educational journey. If you've been contemplating enrolling, I recommend you to take that leap and explore Alaska's pioneering online education. Find out more about this transformative technique to knowledge and how exactly it can maybe revamp your education and professional trajectory. [url=https://www.onlineschoolAK10.com]https://www.onlineschoolAK10.com[/url]
RylieStook · April 15, 2024 at 1:18 pm
Understanding the depths of web-based schools located in Alaska can indeed be a challenge, especially if you're unfamiliar to the concept. I, too, handled these questions but realized that these digital platforms deliver first-rate, all-encompassing educational journey that matches traditional brick-and-mortar establishments.
Starting from the rugged landscapes of Juneau to the dynamic ambiance of Anchorage, Alaska's online schools provide innumerable learning opportunities which are adjustable and suitable. The snow-filled winters not anymore hinder an individual's ability to obtain schooling. Current technology made it possible to chase knowledge inside the coziness and comfort of your house.
Adaptability is a remarkable benefit. You can modify your schedules as per your duties, that is specifically useful for employees or those with domestic duties. Plus, the courses supplied are diverse, inclusive of a wide array of subjects. From introductory basics to advanced specialties, there are something unique for everyone.
Alaska's online schools feature qualified teachers, engaging learning techniques, and helpful peer networks, making for a rich gratifying educational journey. If you've been considering enrolling, I urge you to take that leap and delve into Alaska's innovative online education. Discover more about this innovative strategy to learning and the way it can possibly alter your educational and career trajectory. [url=https://onlineschoolAK10.com]https://onlineschoolAK10.com[/url]
Jamesvalty · April 16, 2024 at 12:27 am
Discovered a unique article – recommended to acquaint yourself! http://nec.phorum.pl/posting.php?mode=newtopic&f=27&sid=70c3131740bd1f1db710dfbfd6f7d00b
Williamanery · April 16, 2024 at 1:58 am
[url=https://darkpad.org?p=e614]counterfeit money dark markets[/url] – How to access the deep web, western union dark markets
1winFoin823#genn6ick[Vevpejuqiquvkeqk,2,5] · April 16, 2024 at 2:37 pm
Топовая Букмекерская контора в мире – [url=https://1win-7.cc/]1win[/url]
Philipacure · April 16, 2024 at 3:30 pm
how to order prescription drugs from canada [url=https://medicationnoprescription.pro/#]can i buy prescription drugs in canada[/url] canadian pharmacy no prescription required
Ernesto · April 17, 2024 at 12:38 am
The previous beginning jackpot was $40 million, with a minimum $10 million rollover.
Also visit my website … https://bestbuddydeals.net/the-power-of-powerball-random-unleashing-the-excitement/
Briansop · April 17, 2024 at 3:13 am
company website [url=https://thetradingview.org]tradingview download[/url]
Sammyorige · April 17, 2024 at 5:14 am
https://vipbuket64.ru/
AngeloceW · April 17, 2024 at 5:30 am
click here to find out more [url=https://galaxyswapper.xyz/]galaxy swapper[/url]
1win920Teedo · April 17, 2024 at 6:47 am
Casa de apostas confiavel n? 1 [url=https://1win-8.icu/]1win[/url]
오케이툰 · April 17, 2024 at 10:32 am
Howdy, I think your website may be having internet browser compatibility issues. Whenever I look at your website in Safari, it looks fine however, if opening in Internet Explorer, it’s got some overlapping issues. I just wanted to give you a quick heads up! Apart from that, great site!
1win919Teedo · April 17, 2024 at 10:52 am
A casa de apostas mais confiavel [url=https://1win-8.xyz/]1win[/url]
ChrisfRier · April 17, 2024 at 11:23 am
choi casino tr?c tuy?n tren di?n tho?i [url=http://casinvietnam.com/#]casino tr?c tuy?n vi?t nam[/url] casino online uy tin
1winFoin819Clini · April 17, 2024 at 2:00 pm
A melhor casa de apostas, recomendo-a [url=https://1win-8.org/]1win[/url]
Legendsteld · April 17, 2024 at 6:00 pm
LГҐn 40000
Murrayrop · April 17, 2024 at 8:19 pm
https://toolbarqueries.google.ba/url?q=https://kupit-dzheneriki-v-spb.ru/
Juliann · April 18, 2024 at 6:04 am
Wonderful write ups. Appreciate it.
Have a look at my blog https://Fitmededu.com/%EC%9C%A0%ED%9D%A5%EC%95%8C%EB%B0%94-%ED%94%BC%ED%95%B4-%EC%98%88%EB%B0%A9-%EA%B5%90%EC%9C%A1%EC%9D%98-%EC%A4%91%EC%9A%94%EC%84%B1/
admiralservice.blogspot.com · April 18, 2024 at 6:27 am
all the time i used to read smaller content which also clear their
motive, and that is also happening with this post which I am reading here.
1win917Teedo · April 18, 2024 at 8:33 am
A casa de apostas mais confiavel [url=https://1win-8.me/]1win[/url]
barber_otml · April 18, 2024 at 1:19 pm
курсы барбера цена [url=http://www.burberi.ru/]http://www.burberi.ru/[/url] .
RobinDaymn · April 18, 2024 at 2:00 pm
Казино с пополнением с Qiwi
Gladys · April 19, 2024 at 2:51 am
Neçə nömrə seçməliyəm?, istifadəçilərə lotereya onlayin lato oyununda necə doğru nömrə seçməli olduğunu öyrədən məlumat verir. Bu, istifadəçilərin qaliblik şanslarını artırmaq üçün effektiv strategiyalar təmin edir.
ChrisfRier · April 19, 2024 at 4:08 am
game c? b?c online uy tin [url=https://casinvietnam.com/#]casino tr?c tuy?n vi?t nam[/url] web c? b?c online uy tin
essaypro review · April 19, 2024 at 5:08 am
I used to be able to find good info from your articles.
1winFoin814Clini · April 19, 2024 at 7:13 am
A melhor casa de apostas legal, eu a recomendo [url=https://1win-9.top/]1win[/url]
1win913Teedo · April 19, 2024 at 7:14 am
Melhor casa de apostas n? 1 do mundo [url=https://1win-9.xyz/]1win[/url]
Richardrox · April 20, 2024 at 2:15 am
[url=https://smart-engineer.ru/]панель оператора сенсорная[/url] – сервопривод delta, датчик температуры дтс
1winFoin810Clini · April 20, 2024 at 9:24 am
Considero esta casa de apostas a melhor [url=https://1win-10.icu/]1win[/url]
ryukzak_flSn · April 20, 2024 at 1:05 pm
Найліпший вибір для пригодницького духу
Збереження безпеки
купити рюкзаки тактичні [url=https://ryukzakivijskovibpjgl.kiev.ua/]купити рюкзаки тактичні[/url] .
pechi_nrot · April 20, 2024 at 3:08 pm
печь для бани атмосфера [url=http://www.pechka-atmosfera.ru/]http://www.pechka-atmosfera.ru/[/url] .
1win906Teedo · April 20, 2024 at 7:25 pm
Aconselho um escritorio de apostas confiavel [url=https://1win-10.net/]1win[/url]
link KKSLOT777 · April 20, 2024 at 11:51 pm
I enjoy looking through a post that can make people think.
Also, many thanks for permitting me to comment!
rolap_asma · April 21, 2024 at 4:06 am
ролл ап печать [url=https://www.rollap.ru]https://www.rollap.ru[/url] .
Jamespiova · April 21, 2024 at 9:12 pm
ehappynews.com
1winFoin803Clini · April 22, 2024 at 8:16 am
Топовая Букмекерская контора, советую [url=https://1win-65.ru/]1win[/url]
1win901Teedo · April 22, 2024 at 8:20 am
Самая топовая Букмекерская контора [url=https://1win-66.ru/]1win[/url]
Brycesteld · April 22, 2024 at 8:32 am
Apprenez les faits ici maintenant
JamesPlove · April 22, 2024 at 9:46 am
More hints [url=https://atomic-wallet.fr]atomic wallet[/url]
RicardoBag · April 22, 2024 at 9:49 am
продолжить [url=https://xn—-jtbjfcbdfr0afji4m.xn--p1ai]электрик томск[/url]
MichaelJap · April 22, 2024 at 11:57 am
купить больничный лист в москве
www.pellegrinofabbro.it · April 22, 2024 at 1:00 pm
You’re the CEO of your profession,” Grismer quotes typically utilized but sage suggestions.
Feel free to visit my web page https://www.pellegrinofabbro.it/2022/12/06/how-to-find-the-best-essay-writing-help/
bbw · April 22, 2024 at 1:55 pm
Nicely put, Thanks.
로또 당첨번호 확인 방법 · April 22, 2024 at 4:49 pm
New York was the fifth state to license , soon after New Hampshire.
my web page; http://Thetinytravelers.ch/wordpress/essen-unterwegs-ein-frittiertes-vorurteil/
1winFoin802Clini · April 22, 2024 at 5:59 pm
Лучшая Букмекерская контора, советую [url=https://1win-67.ru/]1win[/url]
1win900Teedo · April 22, 2024 at 6:00 pm
Самая надежная Букмекерская контора [url=https://1win-68.ru/]1win[/url]
русское порно на улице · April 22, 2024 at 6:22 pm
Seduction can be innate gender differences gender gap gender equality gender sex discrimination. Pre-ejaculate or not the goal focussed can really ruin sexy times he adds. NIH V.20 sperm can be safe as. Spermatozoa sperm cells can either Lift your legs apart so your partner says Segar. Egg cells are often perpetuated wholly or in part by private place. Females are also big parts of. In Sumerian Myth there are benefits of taking the focus off penetrative sex. Early development determines their sex though they may have difficulty navigating cultural attitudes about sexual health. Field Guide research and development for new vaccines against Stis, and the female sexual response. Here’s what research reveals about our. It’s not clear communication with your body releases during sex compared to men. Gay men in countries where homosexuality was constantly changing Western influence on other. Portions of the epidemic as a joke mocking AIDS by calling it the gay culture. If separate eggs are endless AIDS meetings where no one is left out. Masturbation wanking jerking off jacking off and rubbing one out are just a few. Life events and reduced chance of the 19th century it was one of.
CharlesNom · April 22, 2024 at 8:04 pm
365wyoming.com
Harveysteld · April 22, 2024 at 8:18 pm
where to buy augmentin 750/250 mg
RogerclAts · April 22, 2024 at 8:31 pm
homebeachlove.com
FrankDunda · April 22, 2024 at 9:51 pm
Found an enthralling read that I’d recommend – it’s truly fascinating http://pyha.ru/forum/topic/12919.1#msg215522
TigerFortune14Tow · April 22, 2024 at 11:43 pm
Grandes vitorias podem ser encontradas no jogo [url=https://fortune-tiger-4.org/]Fortune Tiger[/url]
FortuneTiger106dup · April 22, 2024 at 11:53 pm
É um belo jogo [url=https://fortune-tiger-3.icu/]Fortune Tiger[/url]
FortuneTiger18dup · April 23, 2024 at 12:02 am
Jogue um jogo positivo e agradável [url=https://fortune-tiger-4.com/]Fortune Tiger[/url]
کون · April 23, 2024 at 2:48 am
Terrific info Appreciate it!
masturbation · April 23, 2024 at 8:55 am
Cheers, Great information!
1winFoin799Clini · April 23, 2024 at 6:09 pm
Всем рекомендую Букмекерскую контору [url=https://1win-73.ru/]1win[/url]
Edwardmeazy · April 23, 2024 at 8:54 pm
Found an article that’s definitely worth your time – take a look https://rsn360.ru/blogs/243/Истории-которые-тронут-вашу-душу-смотрите-дорамы-онлайн-сегодня
TigerFortune15Tow · April 23, 2024 at 11:41 pm
Ganhos faceis no jogo poplar [url=https://fortune-tiger-4.art/]Fortune Tiger[/url]
HeatherFem · April 24, 2024 at 12:13 am
вегас гранд казино
вегас гранд казино
Adriannom · April 24, 2024 at 4:14 am
continue reading this [url=https://smmpanel.one]Buy Twitter Followers[/url]
porn · April 24, 2024 at 4:43 am
I қnow this if ⲟff topic but I’m looking intto starting mу
own weblog and waѕ cᥙrious what all is neeԁed to get set up?
I’m assuming having a blog like yourѕ would cost a pretty penny?
I’m not very web smart so I’m not 100% poѕitive.
Any suggеstions or advice would be greatly appreciated.
Thank you https://sibangdekite-disdikbud.sambas.go.id/gaskuat/?link=olislot
Richardkit · April 24, 2024 at 5:05 am
Opened up interesting material – I recommend sharing this discovery http://brazildownloads.mybb.ru/viewtopic.php?id=391#p2941
Doma_qler · April 24, 2024 at 9:57 am
строительство домов из бруса проекты [url=alexstroy53.ru]alexstroy53.ru[/url] .
migMEP · April 24, 2024 at 10:07 am
Интересно: [url=https://gomarkt.ru/]товары для маркетплейсов оптом[/url] или [url=https://gomarkt.ru/services/posrednik-1688/]посредники доставки 1688[/url]
Может быть полезным: https://gomarkt.ru/services/yuzhnye-vorota-optom/ или [url=https://gomarkt.ru/services/postavshchiki-iz-kitaya/]поставщик из китая в россию[/url]
Ещё можно узнать:
[url=https://samoylovaoxana.ru/otdyh-v-dominikanskoi-respyblike/]Отдых в Доминиканской республике[/url]
или
[url=http://yourdesires.ru/it/security/28-chto-delat-esli-virus-skryl-fayly-i-papki.html]вирус скрывает папки[/url]
1winFoin796Clini · April 24, 2024 at 11:53 am
Рекомендую лучшую Букмекерскую контору [url=https://1win-80.ru/]1win[/url]
ZiahaJef · April 24, 2024 at 2:50 pm
Сериал про космос – [url=https://sg-video.ru/]смотреть звездные врата[/url]
Geraldliede · April 24, 2024 at 3:24 pm
[url=https://avto-dublikat.ru/]https://avto-dublikat.ru/[/url]
1winFoin795Clini · April 24, 2024 at 3:44 pm
Рекомендую надёжную Букмекерскую контору [url=https://1win-82.ru/]1win[/url]
1win893Teedo · April 24, 2024 at 3:47 pm
Ведущая Букмекерская контора в мире, рекомендую [url=https://1win-83.ru/]1win[/url]
Ericktuh · April 24, 2024 at 4:52 pm
עצום עוד יתרון משמעותי של שירותי ליווי דרך האינטרנט, הוא המבחר הגדול של הנשים שעומדות לרשותך. אם אתה אוהב נשים במראה מסוים או מוצא מסוים, לא תהיה לך בעיה למצוא כאלו גם באזור שלך. אתרי האינטרנט מציגים לך נערות ליווי צעירות, כהות, בלונדיניות ועוד. בניגוד מכון ליווי בחיפה – כל הסיבות לרצות!
Anthonyslura · April 24, 2024 at 5:21 pm
Hi all!
We are cheerful dolphins, we live in Bali and have no problems)
Our lifestyle is a bit of work and play, we love surfing the waves and just chilling.
We found our best friends are Capybaras, they stand perfectly on boards and surf on the surface of the ocean, We have a great time with them)
If you want to take a break from the drab everyday life, come to Us, Dolphins and Capybara surfers are waiting in Bali!
Look as at https://dolphins00.wordpress.com
BernieTom · April 24, 2024 at 5:47 pm
המאובזרות לחלוטין, מעוצבות ומתוחזקות. הדירות מתאימות לנשים ולגברים ומאפשרות לך לחוות את הפנטזיות שלך בדיסקרטיות ונוחות. כל שעלייך לעשות הוא לבחון את המודעות הרלוונטיות עבורך ולבחור מגוון רחב של דירות דיסקרטיות במרכז – למצוא מחט בערימת שחת ההיצע הגדול נערת ליווי בנהריה
Emmettsteld · April 24, 2024 at 6:58 pm
buspirone without a prescription
WilliamNox · April 24, 2024 at 7:15 pm
Stumbled upon a unique article, I suggest you take a look https://www.056.ua/list/472302
1winFoin794Clini · April 24, 2024 at 7:31 pm
Рекомендую топовую Букмекерскую контору [url=https://1win-84.ru/]1win[/url]
1win892Teedo · April 24, 2024 at 7:34 pm
Лучшая Букмекерская контора в мире, рекомендую [url=https://1win-85.ru/]1win[/url]
доставка цветов · April 24, 2024 at 10:42 pm
доставка цветов
1winFoin793Clini · April 24, 2024 at 11:16 pm
Рекомендую прекрасную Букмекерскую контору [url=https://1win-86.ru/]1win[/url]
buddhabuildersdup · April 25, 2024 at 12:54 am
Рекомендую сайт [url=https://exchange777.online/buddhabuilders-index/]buddhabuilders[/url]
tnlnsl · June 8, 2022 at 1:49 am
tnlnsl
death metal snapback nike sf air force 1 beige prada transparent tote nike air force sacai nike air force 1 tm 1990 england football kit
lazydesiree · June 8, 2022 at 6:59 am
lazydesiree
banana coach wallet cotton sunflower dress mk brown duffle bag washington nationals beanie hat zions 12 diamond blazer dress toronto blue jays bucket hat 8am
monikakrol · June 9, 2022 at 2:26 pm
monikakrol
belle christmas dress mens 1996 retro nuptse packable jacket north face iphone 6s case with built in screen protector nike knit hat with ball recipe timberland stormbuck the north face himalayan down parka evergreen
skumboy · June 10, 2022 at 9:35 pm
skumboy
world balance aqua trail new york yankees hat walmart number discount oakley baseball sunglasses reebok kobe jersey vivo y51 2020 back cover cable knit newsboy cap pattern instructions
boominets · June 12, 2022 at 6:49 am
boominets
锘縩ike air max 95 mens shoes white purple gray moncler grenoble puffer jacket coach wristlet wallet macys los angeles dodgers on field hat 70s show 2014 15 manchester united blank or custom home soccer shirt kit kids timberland 91694
torgius · June 12, 2022 at 9:22 am
torgius
flyknit lunar 2 quotes thermoball eco snow triclimate new louboutin shoes black and gold kobe bryant jersey jordan 12 red womens moncler thin coat
lpiinews · June 13, 2022 at 11:13 am
lpiinews
jordan retro 5 travis scott carolina panthers new era cap asics stability shoe adidas flux grey turnbury merino wool sweater ralph bakshi shirt
forexwale · June 13, 2022 at 11:32 am
forexwale
nike zoom shift ep gold pink shoes gold headband races black off the shoulder mini dress michael kors maroon wallet us polo assn womens size chart mustard polo neck womens
blturnerintl · June 14, 2022 at 11:54 am
blturnerintl
lunar force 1 duckboot linen lids throwback hats womens adidas ozweego brown coach 75013 supreme x nike sb dunk low hyper blue mens lone peak
audiamorous · June 14, 2022 at 6:32 pm
audiamorous
new england patriots new era sideline knit hat girl nike hyperdunk 2014 low black for cheap captain patch stars nfl moncler breitman jacket adidas zx 8000 nero pelle pandora quartz charm
starori · June 16, 2022 at 4:51 am
starori
plus size print maxi dress new balance v6 blanc galia lahav designer gray gold nike air huarache australia shoes the new warriors jersey ray ban prescription sunglasses vsp
persoro · June 16, 2022 at 10:13 pm
persoro
white blazer dress with gold buttons air force one low gs jonathan richard tweed walking hat red long sleeve top womens stripe coach purse ladies grey adidas trainers
simairway · June 17, 2022 at 8:46 am
simairway
la mode plus clothing nike flex experience black and pink wholesale ny yankees cap black brewers adames jersey schoffel oakham fleece gilet casetify custom grid case
vpoloni · June 17, 2022 at 11:44 am
vpoloni
paloma wool flower dress mens summit hooded down jacket nike philadelphia eagles 29 demarco murray black elite jersey vetements cap haute couture ray ban light ray frames adidas originals long sleeve
detikxom · June 18, 2022 at 8:45 pm
detikxom
stan smith s76330 san francisco giants hat uk xl air force 1 jd white nike foamposite 1 metallic gold mens nike minnesota vikings 32 toby gerhart elite white nfl jersey sale kawhi leonard spurs jersey authentic
bebbrescia · June 19, 2022 at 5:57 pm
bebbrescia
kansas city royals hat new era store v neck casual summer dress reverse retro knights game lamin barrow mens jersey denver broncos 57 alternate navy blue super bowl 50 bound nfl russell westbrook shoe brand navy san francisco giants hat list knoxville
blminter · June 20, 2022 at 9:18 am
blminter
mitchell donovan jersey for cheap nike dunk off white high snapback hats online nike air max thea grigio turquoise jazz home jersey moncler dist jacket
lucomania · June 21, 2022 at 10:03 pm
lucomania
grom squad lifeguard hat next ray ban giannis signed jersey ebay lakers blue and gold jersey high heels for 12 year olds tommy hilfiger runners white
dinkartimes · June 24, 2022 at 4:15 am
dinkartimes
washington nationals diamond era hat amazon nike air max 90 denim blue new york yankees clean up cap billig dri fit reversible basketball jersey for cheap phillies 3 jersey pittsburgh pirates star wars hat units
rf-frontier · June 26, 2022 at 10:52 am
rf-frontier
buy korean clothes online usa pandora necklace extender rose gold reebok high tops black mens ray ban rouge femme moncler winter coats jackets polamalu reebok jersey
sartelcit · June 27, 2022 at 7:04 pm
sartelcit
north face denali 2 hoodie sherlock hat for dogs peppers michigan jersey nike air max 24 7 or noir cincinnati reds old time hat ukulele chords adidas nitrocharge 1.0 knight pack core black
wishpaleo · June 29, 2022 at 5:26 pm
wishpaleo
cute fall outfits 2019 custom made fitted hats new era youtube jordan 1 mid red chicago blanc nike shox s nike free 5.0 svart print ralph bakshi shirt
tamrecording · June 30, 2022 at 7:07 pm
tamrecording
moncler parana jacket san francisco giants game hat linux baltimore ravens hat uk nike sb janoski rm white north face premonition jacket colorado rockies purple hat
sevilorgu · July 2, 2022 at 10:57 pm
sevilorgu
mlb jerseys st. louis cardinals 18 oscar taveras gray grey jerseys louis vuitton red bottom bag nike hyperdunk 2014 bianca and oro ronaldo jersey number 17 michael kors wallet case chelsea 2007 kit for cheap
lebfun · July 3, 2022 at 8:43 am
lebfun
baggy green cap cricket air jordan changing colors kate spade rima patterson fw5305 air max 270 black on feet pittsburgh steelers cheerleader outfit
exledau · July 10, 2022 at 6:19 pm
exledau
caterpillar colorado steel toe jordan 1 retro tokyo biohack sexy tees lebron 2016 cavs jersey steph curry blue jersey wns carina lift
nardulan · July 14, 2022 at 7:37 pm
nardulan
coach python bag air max 97 prm pandora taurus necklace toronto blue jays playoff hat nfl nike flyknit max black green pink shoes ray ban double shade
afidmex · July 19, 2022 at 6:56 pm
afidmex
nfl 49ers gear lebron james basketball jersey number nike zoom fly 3 running warehouse fascinator men ray ban aviator degrade gris lebron james heat throwback jersey
mainoste · August 4, 2022 at 10:09 pm
mainoste
buffalo plaid beanie with pom celtic fc tracksuit bottoms raglan sleeve tie front flare satin dress north face kilowatt jacket polo ralph lauren jeans sale moncler winter coat
alucram · August 5, 2022 at 6:47 pm
alucram
byron paul 41 jersey for cheap dressy jumpsuits adidas nemeziz turf shoes
profprsites · August 10, 2022 at 12:40 am
profprsites
laceless jordan 1 goorin bros shark crossbody blue michael kors purse reebok pump kenzo
veskopetrov · August 11, 2022 at 3:57 pm
veskopetrov
jean ysl purse blue white shirt dress dodgers world champions 2020 hat sb dunk dead bear reigning champ logo stadium jacket bridal and more
umseek · August 12, 2022 at 1:10 pm
umseek
new pittsburgh steelers 84 antonio brown yellow jerseys w 80th patch game girls denim pinafore dress mizuno sweep 4 softball cleats peppers jersey
muadotho · August 16, 2022 at 6:03 pm
muadotho
cleanest nfl jerseys pandora bracelet with letter charms washington football team beanie hat nhl new uniforms 2020
adgeminco · August 17, 2022 at 2:56 pm
adgeminco
pretty little thing sweater dress nike acg black shoes for cheap limited demario davis womens jersey new york jets 56 alternate navy blue nfl nike air jordan spizike white grey fire red
voiceoutnigeria · August 18, 2022 at 8:32 am
voiceoutnigeria
zapatillas velez mujer maglia skriniar lace top for over wedding dress pochette off white homme scarpe nike vaporfly vestiti tirolesi uomo
bettayourself · August 18, 2022 at 8:31 pm
bettayourself
handytasche iphone 6s leder amazon handyh眉lle samsung a5 adidas femme verte andrea sandalias mujer maglia dsquared con fiamme amazon western dress for ladies
rncguide · August 20, 2022 at 12:04 pm
rncguide
handyh眉llen samsung galaxy j5 2016 schutzh眉lle huawei mate 10 pro asics homme tennis tenis diesel only the brave champion t shirt uomo blue puma dress
piterasek · August 21, 2022 at 12:09 am
piterasek
air jordan 1 argento giacche con pelliccia uomo joe burrow jersey stitched rifle paper iphone xr case high heels gr枚脽e 50 kyrie 2a
instepnews · August 23, 2022 at 8:40 am
instepnews
ipad 2019 h眉lle 10.2 zoll apple h眉lle 11 pro max asics gel kanaku sandalias monta帽a mujer decathlon maglia haaland norvegia muji flannel dress
tenergys · August 25, 2022 at 2:41 am
tenergys
broncos afl jerseys oakley flight jacket sunglasses ray ban liteforce rb 7165 puma softride shoes
pojokpos · August 25, 2022 at 7:13 am
pojokpos
zapatos para mujer altos cecil kleid orange twinset borsa nera pom pom knit hat asics gel nimbus 21 herren 42 5 sombrero barbisio negro
wegoodlinks · August 25, 2022 at 5:21 pm
wegoodlinks
capelina mujer playa tara jarmon robe orange minikleid wei脽 portemonnaie und handytasche in einem handyh眉lle f眉r iphone 7 plus nike pegasus 37 decathlon
calimercado · August 26, 2022 at 12:30 am
calimercado
hermes iphone 11 case houndstooth moncler mens atlanta braves 24 deion sanders grey flexbase 2016 mlb player jersey 92 limited louis nix houston texans mens jersey nfl home navy blue long sleeve open front top
skytopsneakers · August 27, 2022 at 5:05 pm
skytopsneakers
sandalias guante hombre popeline kleid schwarz borsello uomo inter the north face expedition cap balenciaga speed trainer schwarz pink viseras para damas deportivas
jimhfl · August 29, 2022 at 6:02 am
jimhfl
iphone 12 h眉lle media markt basket adidas ivy park zapatos en amazon mexico maglia con pelo beginning boutique blue dress sac valentino occasion
lukasshort · August 29, 2022 at 6:10 pm
lukasshort
maison maroquinerie pantofole jordan 1 peluche giacca adidas foot locker long sleeve chelsea jersey otterbox popsocket 12 pro max fu脽ballschuhe schwarz
lepicea · August 30, 2022 at 5:59 pm
lepicea
brendan rodgers moncler jacket kessel leafs jersey nfl jaguars gear under armour 3.0 cap nike metcon womens crossfit shoes navy moncler maya
studiogorsel · August 30, 2022 at 6:02 pm
studiogorsel
jordan flight 2 white nhl jerseys edmonton oilers 23 linus omark white jerseys pandora beads and pav茅 bracelet shein black lace dress michael kors lg mf xbody clutch
jannamai · August 31, 2022 at 9:24 am
jannamai
adidas yung blanche botines cadenas zara maglia celtics grace elements peasant dress sac a main tommy femme new balance 997 bianche
pusatbandarpoker · September 2, 2022 at 11:52 am
pusatbandarpoker
zapatos para mujer altos cecil kleid orange twinset borsa nera pom pom knit hat asics gel nimbus 21 herren 42 5 sombrero barbisio negro
cosmotelogy · September 3, 2022 at 3:28 am
cosmotelogy
oklahoma state football new uniforms doncic earned jersey air dior j1 eqt bask adv w the north face womens dealio down parka nike womens trainers leopard print
eliatorrecilla · September 4, 2022 at 12:47 pm
eliatorrecilla
pink chargers jersey speck iphone xs wallet case designer sneaker damen 2020 bodega nike dunk nike mercurial vapor 13 pro fg schwarz la sportiva pies de gato mujer
cedizmir · September 5, 2022 at 9:20 am
cedizmir
new balance 974 sport indo western cocktail dresses mens white flyknit trainers adizero authentic nhl jerseys striped jacket outfit oakland raider hats sale queens ny
kidslovepuzzles · September 6, 2022 at 6:09 am
kidslovepuzzles
hand woven panama hat schuhe new balance damen vbiger gorro tenue civil mariage kurdische frauen kleidung iphone 8 h眉llen
facemasksbulk · September 6, 2022 at 4:22 pm
facemasksbulk
nike air max weiss blau running mujer 20er jahre damenmode borse di marca a rate washington capitals baseball cap timberland sneakers damen
proevalua · September 6, 2022 at 8:08 pm
proevalua
satin lined slap cap cp body warmer mens eu 28 shoe christian louboutin spike shoes white green ralph lauren polo tea length lace dress
vicksfabs · September 8, 2022 at 6:04 am
vicksfabs
pandora reflexions gold limited james white womens jersey new england patriots 28 alternate red nfl air shox tl blanc michael kors large ciara pandora me and you ring
morgynstar · September 9, 2022 at 8:31 am
morgynstar
tie satin dress valise pc portable scarpe da padel adidas tuta uomo completa cotone 2020 bucs uniforms christmas iphone 7 case
pdftoget · September 10, 2022 at 10:52 am
pdftoget
adidas originals modern 80 trainers in white birkenstock herren clogs 45 sandalias cu帽a mujer tommy hilfiger kleider sommer zara mini bag miu miu acne fisherman beanie
rupulu · September 10, 2022 at 3:59 pm
rupulu
michael kors logo continental wristlet floral pleated dress jordan 1 low strange love moncler windbreaker junior long champ bag backpack target floral maxi dress
dragsteruk · September 11, 2022 at 7:04 am
dragsteruk
samsung s20 fe case cover absatz gummistiefel air jordan court purple low birkenstock tulum beige playera negra caballero abendmode damen festlich
hotelsoham · September 11, 2022 at 3:26 pm
hotelsoham
coach wallet embossed new york yankees cap thailand map kids football boots all red shoes ny snapback hats for uk
hbpmbz · September 13, 2022 at 1:00 am
hbpmbz
kleid 158 festlich iphone 8 h眉lle silikon apple zte blade 10 smart h眉lle media markt yeezy 350 noir lacet reflective chanclas abiertas hombre t shirt nike grigia
valtercasini · September 14, 2022 at 7:40 pm
valtercasini
hilfiger damen boots atmos nike air max 95 asics walkingschuhe damen gore tex zapatos nude zara damen mini kleid piquadro blue square portamonete
besafeab · September 15, 2022 at 7:59 am
besafeab
miami dolphins bobble hat ventura royals plus size tinkerbell dress ruffle dress mini miami dolphins adjustable hat pattern layered lace dress man u uniform for cheap
atrapaniapp · September 16, 2022 at 2:32 pm
atrapaniapp
wei脽e lange kleider borsa rosa love moschino yankees beige hat x_plr schuh adidas sombrero bombin ingles robe de mari茅e avec manche longue
fiverrsnooper · September 18, 2022 at 1:53 am
fiverrsnooper
new york yankees velcro hat 5am nike huarache green and orange dolphins salute hat episode 1 air max 90 qs chicago casual winter outfits 2020
fehifofhie · September 18, 2022 at 7:57 am
fehifofhie
il portafoglio
hyo-kin · September 18, 2022 at 7:37 pm
hyo-kin
monique lhuillier sample sale 2020 color rush lamar jackson moncler alyx vest boston celtics jersey design cream city jersey for sale converse all star retro 70
theicecreambucket · September 20, 2022 at 12:20 am
theicecreambucket
bmw x1 sun visor timberland 6 inch premium damen sombreros de pesca para hombres grossesse pantalon trop serr茅 70 er jahre style xiaomi redmi 8a h眉lle amazon
imwrks · September 20, 2022 at 6:29 am
imwrks
tenue de plage chic 2019 cocktailkleid hochzeit iphone 12 pro silikonh眉lle handyh眉lle fotoapparat asics galaxy 9 zapatillas padel munich
evalurx · September 21, 2022 at 1:07 am
evalurx
charlotte 49ers hat reformation siesta dress denver nuggets chauncey billups 1 blue replica nba jersey sale limited kwaun williams youth jersey cleveland browns 36 alternate orange nfl kobe bryant shoes list
imilade · September 22, 2022 at 5:35 am
imilade
bb2502 nike air force 1 herren reduziert sandalias de mujer en primark strick minikleid borsa con gatto nero woolrich wool hat
lawnpink · September 24, 2022 at 2:06 am
lawnpink
navy blue st louis cardinals hat for sale new jersey nets julius erving 32 white replica jersey sale north face 600 womens coat nike knit winter hat uk nike free metcon 2 red summer ribbed dresses
conquerrsi · September 24, 2022 at 5:29 am
conquerrsi
billige kleider damen borsa saint barth sconto grey wolf hat jordan 1 phantom gym gorro chicago bulls adidas pantalon jean femme enceinte
doorknobwrappers · September 24, 2022 at 2:29 pm
doorknobwrappers
air nike blanche tenis velez hombre pullover rosso uomo silk morning gown portefeuille homme cuir anti rfid nike air max 2090 donne
vulpinoid · September 25, 2022 at 4:02 pm
vulpinoid
marc jacobs cream bag sexy office clothes blazer nike skate moncler fourmi black veste legere moncler homme long sleeve cute dresses
vybzmedia · September 26, 2022 at 5:33 am
vybzmedia
nike air max 90 wei脽 orange
lebsocial · September 26, 2022 at 11:15 pm
lebsocial
reebok houston texans arian foster 23 blue replica jerseys sale chicago white sox world series hat 5000 air max 95 lime verde grigio new york yankees cap johannesburg oh rebecca minkoff maxi edie womens petite short sleeve tops
loanxht · September 29, 2022 at 1:39 am
loanxht
ivy cap with ear flaps nike heren polo the north face dealio quiksilver trucker hat aesthetic oversized tee jordan 1 zoom racer green
natbrasil · September 30, 2022 at 12:58 am
natbrasil
boston red sox caps new era detroit new york yankees hat with rhinestones 5th adidas nmd r1 rouge and bleu man utd pre match shirt for cheap
kingsoftbbs · September 30, 2022 at 6:02 am
kingsoftbbs
nike air max 270 oro hm abbigliamento houston astros white jersey silk iphone case gabor sandale blau nike 97 black white
jinteex · October 1, 2022 at 11:54 am
jinteex
felpa zip bambina uniform kit iphone x case green h枚gl schuh sneakers puma mens boots adidas herren
vedspace · October 3, 2022 at 7:42 am
vedspace
new york yankees cap camo quilts long black polo shirt the iconic dresses pittsburgh pirates hat grey youtube nike kobe nine
reidmanor · October 4, 2022 at 2:22 am
reidmanor
frogskins prizm black polarized england football training kit 2020 dan marino youth football jersey england fc retro shirt louboutin lucifer on cloud all black waterproof
lehuotao · October 5, 2022 at 8:22 pm
lehuotao
maglia corta davanti lunga dietro red tiered smock dress sac a dos eden nat et nin calzature armani north face giubbotto militare jordan and kobe shirt
ddukmani · October 6, 2022 at 5:17 am
ddukmani
antonio melani black dress tommy night dress iphone 11 pro michael kors case white and gold red bottoms pandora charm bracelet on wrist
gizmobhai · October 6, 2022 at 11:33 am
gizmobhai
asics gt 800 herren gorros y chalinas tejidas a crochet robe memory bash festliche kleider weihnachten nike off white handyh眉lle schutzh眉lle ipad pro 11
howtoans · October 7, 2022 at 11:03 am
howtoans
matching mum and baby dresses converse 70 cream lebron 7 media day yellow one piece outfit speedcross 4 womens salomon fedora flat top
maidsquadtx · October 7, 2022 at 6:54 pm
maidsquadtx
zapatillas skechers mujer running maglioni weekend max mara black strappy skater dress longchamps sac 脿 main scarpe adidas uomo vintage demas abiti da cerimonia
lahoreview · October 9, 2022 at 12:39 am
lahoreview
oakland as digital camo hat knitting black western dress for women nhl all star jersey golden knights for cheap warriors nike dri fit nike dunk schwarz and rot uk brown shoes nike air max plus
giftbowtique · October 9, 2022 at 3:50 pm
giftbowtique
nike schuhe mit blumenmuster agua de coco sandalias kleider esprit amazon marsupio stoffa breckenridge trucker hat timberland schuhe herren
fullxd · October 11, 2022 at 1:52 am
fullxd
doc martens kolbert wintergrip yellow fitted caps short sleeve base layer mens nike dunk low black white womens lilac dress for wedding guest bad suns heartbreaker shirt
cursodeunas · October 11, 2022 at 10:44 pm
cursodeunas
wedding guest outfits 2019 adidas yankees cap billig jordan 11 blanc ice bleu a cold wall vomero red new york yankees cap auckland texas light blue flower girl dress
aeryhwryjdm · October 13, 2022 at 8:14 am
aeryhwryjdm
sac 茅tanche submersible vapormax plus bianche e nere pantaloncino jordan nero club america 2019 jersey iphone se protective screen cover think herrenschuh
sugotogo · October 14, 2022 at 7:53 pm
sugotogo
knicks city edition jersey 2018 for cheap atlanta braves beanie hat holster long sleeve black glitter dress portugal training jersey pittsburgh pirates slouch hat sale 2014
adrcrta · October 17, 2022 at 7:27 pm
adrcrta
elite brandon williams womens jersey baltimore ravens 98 home purple nfl nike air max 90 exclusive pandora birth month rings nike menace elite 2 moncler chouette black
mizukachan · October 18, 2022 at 3:27 am
mizukachan
travis scott shoe surgeon charging case for galaxy s10 best nursing gowns supreme toque grey jordan lows aime leon dore 1300 pink
k-editions · October 23, 2022 at 12:36 am
k-editions
nba highest jersey sales black grey white jordan newborn hat with flower pandora bracelet spacers amazon nike air max 1 snow beach winter graduation outfits
bcsarts · October 25, 2022 at 8:49 am
bcsarts
nike air max 90 quickstrike white medium grey varsity red erika short sleeve shirt princess sweetheart neckline wedding dress atlanta braves screaming indian hat new era event lebron 10.8 white yellow uk san francisco giants navy blue hat company
waltonmotor · October 28, 2022 at 1:42 am
waltonmotor
boston red sox new era mlb basic gold 59fifty cap guidelines northface apex bionic jacket red sparkly mini dress black halo one shoulder dress mens tennessee titans 13 kendall wright blue color rush limited jersey pandora marine charm
storams · October 29, 2022 at 6:05 pm
storams
moncler sotiria ysl dust bag ax paris dresses hermes ladies sneakers stiff brim boonie hat pittsburgh steelers 2020 jerseys
sinsumbar · November 3, 2022 at 2:55 am
sinsumbar
yankees hockey jersey how to make a newborn hat crochet queen free rn nike shoes blanc best traditional wear golden state warriors stephen curry jersey oversized basketball jersey outfit
tradersgalleria · November 5, 2022 at 10:55 pm
tradersgalleria
elite o. j. simpson mens jersey buffalo bills 32 home royal blue nfl jordan supreme hats list nike kd ix gold shoes for sale pandora ice cube ring nba the city jerseys for cheap nike air max 90 hyperfuse qs white for cheap
vanllen · November 8, 2022 at 8:12 am
vanllen
pandora gold spacers minnesota north stars jersey history accenteur moncler new england patriots salute to service hoodie real madrid away kit socks engraved necklace pandora
pinmein · November 10, 2022 at 11:43 pm
pinmein
all caps hat adidas nmd salg all hvit moncler montcla coat moncler parka mens atlanta braves fitted hats lids ukulele
belpages · November 12, 2022 at 1:47 am
belpages
moncler marly jacket coach f55398 nike fly ii orange clarks desert boots mens summer dress hats mavericks new jersey
srankhala · November 16, 2022 at 3:58 am
srankhala
blush rose gold bridesmaid dresses fila disruptor 2 iridescent washington nationals new era mlb b dub 59fifty cap ball gown amazon coach f30550 medium charlie backpack black
baffineri · November 22, 2022 at 12:06 am
baffineri
sun shirt with hood mens misfits long sleeve dunk high x ambush cosmic fuchsia stockx phone purse cover mens alexander mcqueen trainers sale puma sf fanwear baseball cap
dorichon · November 24, 2022 at 4:42 am
dorichon
kansas city royals hats black hat large nike roshe run black volt white alta moda for cheap 2014 super bowl jerseys denver broncos 24 champ bailey black super impact limited jersey moncler off white puffer jacket nike kd 8 basketball shoes for men red…
caulacbonail · November 25, 2022 at 10:34 am
caulacbonail
sun shirt with hood mens misfits long sleeve dunk high x ambush cosmic fuchsia stockx phone purse cover mens alexander mcqueen trainers sale puma sf fanwear baseball cap
sinjambi · November 26, 2022 at 7:13 pm
sinjambi
air max 90 red rosa women nike detroit lions 4 jason hanson elite blue alternate nfl jersey sale toronto blue jays new hats shein oversized graphic tees new womens nike running shoes golden state warriors trophy hat
nnz-home · November 28, 2022 at 11:00 pm
nnz-home
saucony endorphin speed 2 shield oakley sunglasses targetline kansas city super bowl hoodie santos fc kit klopp jacket nfl cowboys attire
listerful · November 29, 2022 at 12:18 pm
listerful
buffalo sabres 7 rick martin white throwback ccm jersey michael kors vanilla wallet h m long sleeve blouse pakistani suits sale love script ring pandora olive green red bottoms
conseilsturf · December 17, 2022 at 6:25 pm
conseilsturf
barcelona neon green jersey for cheap vibram louboutin christian louboutin lace heels tbdress plus size maxi dresses garrett celek 88 jersey coach wristlet inside
derekessary · December 18, 2022 at 1:18 am
derekessary
grigio converse boots nike reversible bonnet chapeau zimon coque realisation par wild cherry robe tennessee titans new era nfl jr team classic 39thirty cap rose gold prom dress with slit
livestreamwinkel · December 19, 2022 at 3:16 pm
livestreamwinkel
stetson gus crushable cappello calzado para trekking hombre basket valentino homme blanche noir kansas city chiefs chapeau jane shilton vintage handbags jordan 5 bianca metallic argento
hotelruf · December 20, 2022 at 9:10 am
hotelruf
pro max 12 case amazon waikiki dresses nike air perce 1 low nero fire calgary flames reverse retro hoodie long dress with sweater air jordan iv svart
demuslimah · December 21, 2022 at 8:58 pm
demuslimah
navy blue michael kors wallet birthday dress for 16 year girl asos new in dresses nlb jerseys texans rangers blank white jerseys moncler lauteraarhorn steelers salute to service long sleeve for cheap
glshlm · December 22, 2022 at 8:05 am
glshlm
moncler wind runner pandora tree earrings mitchell and ness randy moss jersey red bottom shoes designer asics black leather womens shoes moncler bleu jacket
digitalconstitutions · December 22, 2022 at 10:17 pm
digitalconstitutions
blue suede red bottoms asics kayano 25 sp iphone 11 case thin fit 360 asics venture 7 trail mock neck cutout dress adidas neo trainers mens blanc
brodheim · December 28, 2022 at 12:24 pm
brodheim
miami dolphins new era nfl nero bianca neo 39thirty berretto clear rojo bottom zapatillas rouge wing bottes prices usa ariat logo patch trucker chapeau roswheel waterproof saddle bag nero air max 270 react
het-nus · December 28, 2022 at 10:49 pm
het-nus
women nike new england patriots 55 brandon spikes elite navy blue team color nfl jersey sale texas rangers womens baseball caps ebay adidas nemeziz 17.1 blue shoes for sale wedding louboutins all red louboutin heels amazon ad actress dress
kapybara · December 30, 2022 at 3:33 am
kapybara
mango nero ankle stivali ipad 2018 coque silicone proenza schouler velvet dress viola clutch borsa wedding topshop grau schuhe noir cement 3 2019
plbecs · December 31, 2022 at 10:31 am
plbecs
cute cowgirl cappelli harris tweed peaky blinder berretto zapatillas munich blancas mujer magnum centurion 8.0 miami marlins new era mlb kids stars et stripes 59fifty casquette valentino quilted shoulder bag
salluzfoods · December 31, 2022 at 7:24 pm
salluzfoods
golden goose clean zapatillas vestido to impress hombre style closed toe strappy tacchi nero skirt under vestido rosado medio tacones sandalias plus size two piece dress set
sigmaturf · January 2, 2023 at 3:47 am
sigmaturf
washington nationals mlb team linen 9twenty cap revolve strapless dress android battery h眉lle nike vapor 12 elite fg schwarz scarpe montagna dolomite j5 coque coque
directchampagnes · January 2, 2023 at 1:47 pm
directchampagnes
marron robe pretty little thing phoenix suns on court collection 9twenty cap silver sparkly prom dress h眉lle samsung galaxy j4 new balance damen 860v8 running schuhe marina militare blu suede alto tacchi
infoadicciones · January 3, 2023 at 10:11 pm
infoadicciones
marrone adidas berretto pale azul wide fit zapatillas tong ralph lauren femme femme roger federer chapeau madewell bags nike zoom sd 4 nero
malvernbadminton · January 5, 2023 at 4:35 am
malvernbadminton
best selling national soccer jersey tennessee titans 2020 jersey cheap timberland boots china bills cole beasley jersey white and red dunks on feet mr price plus size dresses
realworldview · January 5, 2023 at 4:20 pm
realworldview
van zeeland borse schwarze buffalos converse fur baskets carvela caqui zapatillas mesh arm vestido pyrex ciabatte
happylimo · January 6, 2023 at 3:54 am
happylimo
shift kleid maxi arizona cardinals fitted cappello patagonia fishing berretto blanco y oro fila zapatillas chaussures reqins 2018 portland trail blazers bonnet
ponsdevice · January 7, 2023 at 11:50 pm
ponsdevice
cowboy femme cc bonnet logo dooney and bourke drawstring bag new balance 996 marina militare bianca stalker chapeau cowboy galaxy a5 s view coque
fifaleague · January 8, 2023 at 12:05 am
fifaleague
toronto raptors adidas 2016 nba draft snapback berretto menorquinas glitter ni帽a mango marron bottes new era rouge sox chapeau burlap bag manufacturer bianca air force 1 medio uomo
multiterra · January 9, 2023 at 8:46 pm
multiterra
zwiegen盲hte stiefel herren under armour charged impulse mens lila wei脽e jordans tenis skechers animal print warme kleider f眉r den winter borse tommy hilfiger zalando
missheadtotoe · January 11, 2023 at 9:55 pm
missheadtotoe
zapatos mujer 24 horas ofertas maglia reggina 2020 21 30s fancy dress sac lafuma adidas basse donna tally weijl pantaloni bianchi
kaasajans · January 13, 2023 at 8:11 am
kaasajans
gray pink adidas zx 750 sneakers canada dark pink shirt outfit female nike vikings aj5 fire red nike phantom gt elite 3d fg elite steve weatherford mens jersey new york giants 5 lights out black nfl
qindness · January 13, 2023 at 11:51 am
qindness
japanische kleidung frauen onitsuka tiger gsm gris cheetah print long vestido zapatos de salon maglie inter 2011 asics gel essent 2 donna
rcnutricion · January 13, 2023 at 11:03 pm
rcnutricion
nike air zoom pegasus 34 black and blue minnesota twins cowboy hat bands nike oakland raiders 89 amari cooper white game womens jersey new york yankees hat london ny retro 6 on feet new balance 997 navy
tooyoou · January 14, 2023 at 1:58 am
tooyoou
mango schwarzes kleid marrone stetson cappello iphone 12 mit oder ohne h眉lle zapatos negros mujer escarpin mode 2019 sac homme ville
bionutronics · January 15, 2023 at 2:27 pm
bionutronics
linen summer dresses online authentic wvu football jersey for cheap leather phone cases amazon michael kors harrison logo duffle bag fake loubs for sale mens womens tailored gilet
finharmoni · January 16, 2023 at 2:34 am
finharmoni
dune gris suede bottes long sleeve summer mini dress boina jason statham magic tea party dress tommy hilfiger little zaino schuhe eine nummer zu gro脽
emiliemorin · January 17, 2023 at 7:54 am
emiliemorin
new england womens football kit for cheap ymcmb hats grey wild fable turtleneck dress nike air force 1 shadow white and pink sneakers pandora firefighter charm
tecnomagzne · January 17, 2023 at 9:27 pm
tecnomagzne
1850s evening gowns suit net neck design ronaldo jersey and shorts for cheap mens nike dallas cowboys 54 bruce carter elite white throwback alternate nfl jersey sale nike free superfly beanie red bull billig
greaterkakinada · January 18, 2023 at 12:25 am
greaterkakinada
60er kleider zapatos muy comodos hombre puma rsx noir orange girls wide scarpe naranja y p煤rpura vestido gorra de los lakers 2020
fundamitre · January 18, 2023 at 2:14 pm
fundamitre
pandora sterling silver stud earrings red bottom red heels nike air jordan8 moncler baby puffer jacket coach metro horse and carriage tote stylish eve summer outfits
songhonginconst · January 19, 2023 at 9:04 pm
songhonginconst
western boutique dresses most expensive ladies borsetta bond street rot tape formal schuhe abendkleider kurz elegant amazon negro mary jane wedges basquette air max femme
agencecodit · January 20, 2023 at 5:07 am
agencecodit
nike air force 1 february 2021 pandora otter cincinnati reds all star hat nike air jordan 11 all white blue huarache off white toddler knit hat with bulky yarn wholesale
ambzsalon · January 21, 2023 at 12:46 am
ambzsalon
ray ban ry1528 yellow bucks jersey coach brown and black backpack knitted newborn baby boy hats new quartz light blue shorts outfit womens coach 75013
telosanft · January 27, 2023 at 11:49 am
telosanft
chivas long sleeve jersey elite andre ellington youth jersey arizona cardinals 38 home red nfl air max 90 sneaker men cheap all grey shoes real air jordan retro for sale scott kazmir 22 white authentic jersey sale old navy pintuck dress
nikknack · January 27, 2023 at 4:21 pm
nikknack
louboutin iriza juju smith schuster color rush jersey for cheap boys denali dragon snapbacks gold nike air flight 89 true blue for sale nike air max 90 top layer leather all white shoes
scifiindia · January 27, 2023 at 8:09 pm
scifiindia
khaki blazer dress michael kors large travel tote white prom dresses under 100 the best asics for running moncler sassiere jacket michael kors blush tote
karunasoap · January 29, 2023 at 8:43 pm
karunasoap
chivas long sleeve jersey elite andre ellington youth jersey arizona cardinals 38 home red nfl air max 90 sneaker men cheap all grey shoes real air jordan retro for sale scott kazmir 22 white authentic jersey sale old navy pintuck dress
cissemosse · January 30, 2023 at 1:21 am
cissemosse
oklahoma city thunder shirt no bad ideas devin flex cap childrens crochet hat pattern free red glitter chucks san francisco giants world series hat 2010 january 2017 salomon xt 6 pink
alyadance · January 31, 2023 at 6:33 am
alyadance
party time mini dress green new york yankees cap light blue wedding aq1778 nike dillards plus size white dresses cool papa bell jersey for cheap cooper logo billfold wallet with coin pouch
andylampert · February 1, 2023 at 8:12 am
andylampert
grey red bottoms mens iphone 12 balenciaga case michael kors tasche selma mini baby boy knit hats patterns baby classic football shirts deansgate new balance 560
balazskoren · February 4, 2023 at 12:13 am
balazskoren
michael kors brown jet set tote new york yankees got rings t shirt for cheap grey louboutin trainers wine junior bridesmaid dresses so kate 100 new york jets new era 2017 nfl draft 59fifty cap
biothay · February 7, 2023 at 11:40 am
biothay
chivas long sleeve jersey elite andre ellington youth jersey arizona cardinals 38 home red nfl air max 90 sneaker men cheap all grey shoes real air jordan retro for sale scott kazmir 22 white authentic jersey sale old navy pintuck dress
quecarajoes · February 11, 2023 at 8:50 pm
quecarajoes
rose lavelle uswnt jersey nike free 4.0 flyknit black for cheap adidas gazelle schwarz white gold and other stories shirt dress babydoll dress floral
kuenstlerkolonie · February 12, 2023 at 1:58 pm
kuenstlerkolonie
black hat red bottom scala cotton crusher hat nike dunks green and yellow miami dolphins cap white zara satin shirt dress offspring jordan 1 unc
massamuscle · February 14, 2023 at 5:05 am
massamuscle
puma netball dresses jordan hat born and bred up girls viking costume white shirt mom jeans mens detroit lions 35 joique bell elite jersey white pro line gold collection red bottom red heels
crimsoku · February 17, 2023 at 7:13 pm
crimsoku
kobe 8 white red for cheap teal jordan hats usa tkmaxx coach handbags new balance m990 v2 dior a line dress matching hawaiian shirt and dress
evecalls · February 17, 2023 at 7:27 pm
evecalls
47 brand sixers sweatshirt charles tiffany engagement ring designer slip on shoes leather phone cases amazon salwar neck designs for fat ladies raiders beanie white
dizienleri · February 17, 2023 at 8:52 pm
dizienleri
canada goose bodywarmer grey louboutin so kate 120 sale white cold shoulder t shirt baby care dress online
sinkaltim · February 22, 2023 at 12:14 pm
sinkaltim
fc barcelona black jersey long sleeve ray ban 4325 nhl jerseys 2011 st pattys day chicago blackhawks 88 patrick kane green jerseys with 2013 stanley cup champions patch nike sb grey and black mother and son dresses online
pa-clan · February 23, 2023 at 2:09 pm
pa-clan
black pink air max 720 burgundy blouse outfit most popular asics womens running shoe nike air max 1 grey wolf red sox hat with rhinestones michaels prada shoes cloudbust black
smileytips · February 26, 2023 at 3:33 am
smileytips
columbus crew long sleeve shirt robert horry mitchell and ness ferrari edition oakley sunglasses nike air max 98 ii zaneck parka nike air force 1 low 07 starfish
webdooni · February 26, 2023 at 2:50 pm
webdooni
wholesale washington nationals batting practice hat travis scott air supreme nike air max plus green miami dolphins adjustable hat pattern denim jumper dress h m moncler tib gilet black
crmozon · March 11, 2023 at 5:14 am
crmozon
christian louboutin gaybrown louboutinslouboutin 39authentic red bottom shoes adidas shoes nmd r1nike sb stefan janoski premium nero pellenike sb stefan janoski max sky blueair max 90 frau white nike sb reactasics gel venture 6 blancnike air max 95 sor…
kosmax · March 13, 2023 at 5:58 am
kosmax
ef1582 miami dolphins basketball jersey for cheap drew brees white saints jersey for cheap ruched skirt outfit louboutin female shoes nike lebron ambassador 9 alle sort
http://images.google.co.za/url?q=https://www.hkflowersdelivery.com · April 11, 2023 at 8:26 am
http://images.google.co.za/url?q=https://www.hkflowersdelivery.com
}{Always remember that there are tons of different options available to you when looking for hair accessories. The sky is really the limit here, and you can choose from different braids and headbands, bows and ribbons, clips and curlers, and much, much…
https://images.google.com.hk/url?q=https://www.hkflowersdelivery.com · April 18, 2023 at 1:46 am
https://images.google.com.hk/url?q=https://www.hkflowersdelivery.com
}{Always watch the trends and changes in the fashion world. Fashion is changes constantly, so it is important to read magazines to keep yourself updated. They are likely going to showcase the new trends first.
https://www.google.co.kr/url?sa=t&url=https://www.hkflowersdelivery.com · April 18, 2023 at 2:00 am
https://www.google.co.kr/url?sa=t&url=https://www.hkflowersdelivery.com
|Options simply abound in fashionable hair accessories. You can choose from lots of options, including headbands, scrunchies, bows, barrettes and extensions. Your wardrobe should include several hair accessories. You can match your scrunchy to the colo…
https://www.google.si/url?sa=t&url=https://www.giftspresentsformen.com · April 19, 2023 at 1:04 am
https://www.google.si/url?sa=t&url=https://www.giftspresentsformen.com
|Stay aware of the current trends in fashion. Change is constant when it comes to style, and magazines are a great way to follow this. They are usually the first source to catch new trends in style.
https://maps.google.by/url?q=https://www.hkflowersdelivery.com · April 19, 2023 at 1:27 am
https://maps.google.by/url?q=https://www.hkflowersdelivery.com
|A great looking purse can complement your outfit, but make sure it goes with whatever other bag you are carrying. If you have a briefcase, you want it to match your purse. You should also never carry around more than two types of bags.
lsdmuzic · June 8, 2023 at 12:50 pm
lsdmuzic
boston red sox newsboy hat 07 union jordan 1 blue khloe jaymes bridesmaid dressespetra ruffle gownvera wang one shoulder dressforever unique maxi dress women in little black dress carmela patent leather bow tassel red sole pumps jodhpuri suit rajputi
https://rigobertostrosin.blogoscience.com/25175972/simplifying-the-car-shopping-process-for-you · June 9, 2023 at 11:59 pm
https://rigobertostrosin.blogoscience.com/25175972/simplifying-the-car-shopping-process-for-you
{Casual up-dos are a good way to pick up the hair from your shoulders. Long, loose hair can get in the way during work or play. When you’re out of time, put your hair up in a bun!
quattic · June 15, 2023 at 6:14 pm
quattic
jamal adams jersey authentic philadelphia 76ers 21 joel embiid blue swingman jersey skirt and coat outfit nike dallas cowboys 12 roger staubach white men stitched nfl limited rush jersey simple fit and flare dress cheap blank basketball jerseys
https://www.preservedroseshk.com/sleep-better-and-safer-with-these-sleep-apnea-tips/ · June 17, 2023 at 7:50 am
https://www.preservedroseshk.com/sleep-better-and-safer-with-these-sleep-apnea-tips/
}{When deciding your style, try to find the appropriate fit for your personality. First of all, no one in this world is perfect. If you focus on perfection, you lose the freedom to be yourself. Amazing and memorable styles have come from models and cel…
erogero · June 20, 2023 at 6:45 am
erogero
pumas jersey 2019 lilac classic crocs dear summer off white collection banana republic pink dress nike air huarache cheap blue and grey shoes cloud white ultra boost
cwvanlines · June 24, 2023 at 2:04 am
cwvanlines
pleated gowns dresses chargers nfl online carolina panthers mens long sleeve shirtatlanta falcons cheerleaders uniformskraken goalie helmettaylor hall new jersey devils cheap coach wallets men louboutin ribbon heels michael jordan hats uk toursnike men…
thestmc · June 28, 2023 at 7:57 am
thestmc
football coaching wearnba jersey greyoilers blackout jerseyebay drew brees jersey nhl knit hats uk 2017oakland as alternate hat vietnew cincinnati reds hat x2new york mets padded hat vietnamese jordan 1 negro patent orojordan 11 hvit decemberair force…
meritking · June 29, 2023 at 9:26 pm
Drone Hardware
https://letme5.net/?p=1648
grandpashabet · June 30, 2023 at 1:43 pm
Drone Hardware
https://www.paintfarby.pl/2017/06/farby-do-zabezpieczen-ppoz/
lacarspotting · July 5, 2023 at 9:47 pm
lacarspotting
kobe ix bhmhoka bondi 7 all blackasics gel kayanofemmes dual fusion blanc christian louboutin just nodo 85 red sole sandalslouboutin mens sneakers spikesmatching red bottoms for him and herchristian louboutin pink suede pumps air jordan 9 kvinner all s…
madridbet · July 6, 2023 at 9:45 pm
Drone Hardware
https://direct28.com/un-depute-francais-qualifie-le-gouvernement-senegalais-detre-en-plein-derive-autoritaire-video/
transorgs · July 8, 2023 at 3:44 pm
transorgs
wowsun sunglassescheap oakley golf sunglassesdiscount womens oakley sunglassesoakley radarlock path asian fit hooded fleece giletll bean mens short sleeve t shirtsreebok long sleeve womensmens big and tall short sleeve shirts air jordan 4 noir cehommes…
caspigas · July 10, 2023 at 4:28 pm
caspigas
white denim overall dress 2011 barcelona 2012 kit for cheap red bottom jimmy choo game cortland finnegan womens jersey miami dolphins 24 home aqua green nfl
meritking · July 10, 2023 at 6:07 pm
Drone Hardware
https://kidscareschoolbti.com/index.php/2018/07/24/drawing-class/
makersfinds · July 11, 2023 at 1:51 pm
makersfinds
pink bills jersey for cheapdolphins 2019 uniforms for cheapvikings sweater for cheapmarcedes lewis 89 jersey new york yankees fitted hats cheap gasjordan jumpman bucket cap kitrealtree camouflage atlanta braves hat meaninglos angeles dodgers script hat…
mirkurortov · July 15, 2023 at 12:34 am
mirkurortov
moncler maya ssensemoncler orangeboys moncler coat salelaplance moncler louboutin paloma michael kors whitney large studded royal blue dresses for saleh m orange floral dressbeaded tulle gownversace butterfly dress badymoremoncler gnosia nylon puffer j…
saiyla · July 15, 2023 at 12:54 am
saiyla
miami heat fitted hat billig nike dunk sky hi essential black wedge trainers jordan stretch fit hats mens cute dress shirts for women washington nationals virginia tech hat yakima washington
cigarhumidor · July 17, 2023 at 11:07 pm
cigarhumidor
nike rams 27 tre mason gold mens stitched nfl limited rush jersey minnesota vikings color rush body warmer fur hoodboys navy giletnike crop long sleeve toplong sleeve cotton tee womens nike zoom rookie wine red dressy tennis shoes mens how to knit a ba…
cepsarf · July 22, 2023 at 12:29 pm
cepsarf
cincinnati reds khaki hat france national team jersey for cheap miami dolphins hats uk foldable air max 95 coming soon ny rangers authentic jersey atlanta braves st patricks day hat giveaway
My Homepage · July 27, 2023 at 8:41 pm
… [Trackback]
[…] Read More Infos here: teqtosystem.com/web/?p=18 […]
filigrania · July 28, 2023 at 11:33 pm
filigrania
rockies 4th of july hat for cheapla rams snapback billigtoddler knit hat ear flaps pattern librarynew york mets championship hat 55 nike stock vapor pro jersey tiffany x and o necklace nike react 270 mens noirnike shox online noirnike free run 50 femmi…
moltenmama · July 31, 2023 at 6:47 am
moltenmama
eddie george ohio state jersey mens alphaboost jordan jumpman air pro snapback cap for cheap 2 piece boho wedding dress garnet hill linen dress
meritking giriş · July 31, 2023 at 10:56 am
Drone Hardware
https://www.ecofriendlypack.com/2015-volkswagen-golf-wins-best-car-to-buy-2015-award/
meritking · August 4, 2023 at 7:07 pm
Drone Hardware
https://georgedickson.co.uk/editorial/7-top-tips/
movekappa · August 6, 2023 at 12:53 am
movekappa
balmain pink tweed dress pink body warmer womensadidas climacool long sleeve golf shirtsplain white shirt for girlport authority womens polo nasty gal yellow dressmaria b dresses with pricetwo piece dress sheinoff the shoulder satin trumpet gown la fem…
taedits · August 9, 2023 at 2:40 am
taedits
new pittsburgh steelers 84 antonio brown yellow jerseys w 80th patch game girls denim pinafore dress mizuno sweep 4 softball cleats peppers jersey
cpsmath · August 10, 2023 at 2:01 am
cpsmath
rockies 4th of july hat for cheapla rams snapback billigtoddler knit hat ear flaps pattern librarynew york mets championship hat 55 nike stock vapor pro jersey tiffany x and o necklace nike react 270 mens noirnike shox online noirnike free run 50 femmi…
Заказать Статейныое и ссылочное продвижение – Checktal · August 10, 2023 at 10:43 pm
[…] ссылкой большинство используют разработанные обратные ссылки на сайте проекты обратные ссылки бесплатно для сайта […]
meritking · August 11, 2023 at 11:56 am
Drone Hardware
https://guymapoko.com/t_3_front/
smtlrtcc · August 12, 2023 at 5:25 am
smtlrtcc
michael kors tote bag outlet platform converse on feet adidas nmd hvit gucci conceptair max 3 voltnike air jordan retro 11 brojosjordan spizike noir and rouge best dress for girls nike mercurial superfly v tf grey shoes for sale pandora elephant neckla…
contiendas · August 18, 2023 at 7:54 am
contiendas
michael kors blue card holderlight blue coach wristletcoach pennie shoulder bag in signature canvascoach keychain purse h m baby girl party dress dresses trendy nike air jordan 1 flyknit wolf grey nike hypervenom phinish fg goldnike roshe run purple ho…
kingroyal · August 18, 2023 at 9:13 am
Drone Hardware
https://swahaiyer.com/2017/08/30/ms-perfectionist/
meritking · August 19, 2023 at 12:18 pm
Drone Hardware
https://enchantedwoodlandweddings.co.uk/inspiration/saramatt20435/
kingroyal · August 19, 2023 at 12:33 pm
Drone Hardware
https://uhlenbru.ch/?attachment_id=8
techonesolution · August 24, 2023 at 6:23 am
techonesolution
ralph lauren mens gilet sale cousin pandora charm air max 90 sneaker men cheap all grey shoes real air jordan retro for sale louboutin reddit kings highway shoe
grandpashabet · August 28, 2023 at 11:10 am
Drone Hardware
https://donegalmammy.com/donegal-mammy-awards-mothers-day-definitely-not-cancelled/
bazibood · August 30, 2023 at 8:16 am
bazibood
vieira 2 orlato flat louboutin shoe box seahawks 3 jerseyblack and red san francisco 49ers jerseycristiano ronaldo clothing brandmilwaukee bucks champions shirts fashion nova african dress cute polka dot dress magbak iphone 12 pro max
toptorah · September 2, 2023 at 1:41 pm
toptorah
bucks championship jersey 2021 tim tebow jaguars jersey for sale liu jo maxi alexa ohio state football jersey gray new balance white 608 rockies 19 charlie blackmon green salute to service womens stitched mlb jersey
fuck google · September 5, 2023 at 1:20 pm
Drone Hardware
https://wizvids.co.uk/increasing-customer-base-with-help-of-explainer-videos/
latzinsurance · September 9, 2023 at 9:27 pm
latzinsurance
so kate pointed toe pump coach red wristlet bianca red bottoms florida dolphins hatrare fitted new era hats xbox 360nfl patriots sideline knit hat mensred sox memorial day hat vanilla wow pink and white nike free run air jordan 5 retro white emerald gr…
avplanner · September 13, 2023 at 6:26 pm
avplanner
nike jacksonville jaguars 14 justin blackmon green limited kids jersey jamal adams jersey authentic philadelphia 76ers 21 joel embiid blue swingman jersey nike air max 2015 white citrus metcon turbo white pandora beaded seashell ring
doramago · September 16, 2023 at 10:42 pm
doramago
retro 12 concord nike pink long sleeve top pandora jewelry harry potter collection dangri design dressjapanese traditional dress femaledillards mother of the bridelawn frock design casual tiered dress iphone 12 mini military casespigen iphone 11 pro ca…
https://www.camisetasbulls.es/product-sitemap1.xml · September 18, 2023 at 9:52 pm
https://www.camisetasbulls.es/product-sitemap1.xml
|On a hot summer’s day, wearing your hair up can be fashionable and functional. Long, loose hair can get in the way during work or play. If you do not have time for a more elaborate style, just pull it into a cute bun.
sellergyllc · September 20, 2023 at 6:29 am
sellergyllc
air jordan 13 sort and gul preschool raptors jersey jordan 11 cap and gown womens billigsan diego padres fedora hat ukboston red sox new era mlb c dub 59fifty cap ratenew york yankees cap urban outfitters discount how big to make a newborn hat crochet…
https://www.topraybansoutlet.com/product-sitemap1.xml · September 24, 2023 at 12:32 am
https://www.topraybansoutlet.com/product-sitemap1.xml
|You do not need to have too much makeup in your kit. Pick the best items for each season to keep in your beauty kit. Think about what you need for your day look and your evening look. Once you open makeup, it can go bad. Germs can even grow on it if i…
fuck · September 24, 2023 at 3:23 pm
Drone Hardware
http://mistersquinter.com/tourist/?p=1756
porn · September 27, 2023 at 12:34 pm
Drone Hardware
https://nethajinaturopathy.org/acupuncture-clinic/
https://www.mipcon.co.id/?URL=https://www.camisetaswarriors.es/ · September 29, 2023 at 10:11 pm
https://www.mipcon.co.id/?URL=https://www.camisetaswarriors.es/
|There is no need to go along with every popular fashion trend. What may look great on that runway model may make you look like a carnival side show. Do what makes you comfortable. You should follow your natural instincts. Following your instincts will…
fuck · September 30, 2023 at 7:59 pm
Drone Hardware
https://rooftopindia.in/2020/04/25/why-solar-rooftop/comment-page-1007/
child porn · September 30, 2023 at 11:58 pm
Drone Hardware
https://vifff.ch/call-for-entries-2015/
depiloecia · October 5, 2023 at 9:40 am
depiloecia
miami dolphins bucket hat 90snew york mets 50th anniversary hat tricksminnesota twins winter hat listtexas rangers 2015 playoff hat pin small marlon shoulder bag nike air force 1 gs hyper pink cementnike free mercurial superfly bluejordan retro 4 blue…
https://www.fca.gov/?URL=https://www.camisetasceltics.es/ · October 7, 2023 at 5:27 am
https://www.fca.gov/?URL=https://www.camisetasceltics.es/
{When wearing sheer clothes, make sure the sheer parts are in the right areas. You never want to wear something that is see-through in your private areas, as this gives off the appearance of being trashy and not classy at all.
porn · October 8, 2023 at 12:51 pm
Drone Hardware
https://nwvagtech.co.uk/mini-remapping-in-runcorn/
porn · October 9, 2023 at 12:27 pm
Drone Hardware
http://jaikejriwal.com/2015/11/19/hello-world/
cyberverge · October 10, 2023 at 4:41 am
cyberverge
ladies dress size xlsolid yellow dressoutfits for brunch in fallmatilda jane christmas dress jason witten throwback jerseybryant 24 jersey for cheapuga do more shirtdevin booker suns jersey dinosaur summer dress new york yankees cap font key michael ko…
porn · October 10, 2023 at 8:44 pm
Drone Hardware
https://bushfalling.pw/appointments-manage-your-time-better-at-home-to-be-effective/
porn · October 11, 2023 at 10:13 am
Drone Hardware
https://www.gestalt-rostov.ru/plug.php?e=guestbook
porn · October 12, 2023 at 1:27 am
Drone Hardware
https://rsamaliamedika.com/index.php/2020/06/30/hello-world/
https://app.espace.cool/clientapi/subscribetocalendar/974?url=https://www.camisetasheat.es/ · October 13, 2023 at 10:03 am
https://app.espace.cool/clientapi/subscribetocalendar/974?url=https://www.camisetasheat.es/
}{Don’t follow a trend just because it’s “in.” What looks amazing for a runway model might not look great on you. Follow your tastes, not whatever flavor is popular in the most recent fashion magazine. You are going to want to go with your gut on t…
child porn · October 13, 2023 at 11:53 pm
Drone Hardware
https://www.appemporio.com/home-delivery-software/
sommarbutik · October 14, 2023 at 2:25 am
sommarbutik
asos edition sophia plunge iphone 12 pro max case with lanyard boston red sox wool hat knitting patterntransformers new era 59fifty fitted hats womenskansas city royals trucker cap 80sold style pittsburgh pirates hat nike air max 90 white dam womens ne…
child porn · October 14, 2023 at 5:29 pm
Drone Hardware
https://www.nihol.uz/forumy/forum6/topic30/?PAGEN_1=23290
porn · October 17, 2023 at 11:58 am
Drone Hardware
https://lsvmetals.com/crafting-the-perfect-blueprints/
risetj · October 18, 2023 at 7:02 am
risetj
air jordan retro 4 flyknitkobe 9 em svart metallic silveradidas predator 1994 fglebron james nike zoom soldier ix kobe bryant iconic moments t shirtart shell jerseyyouth soccer warm up jacketschicago bulls mitchell and ness jersey nike m2k tekno mens s…
child porn · October 18, 2023 at 11:23 am
Drone Hardware
https://dongtrandvb.com/lap-dat-cac-kenh-the-thao/
child porn · October 20, 2023 at 3:35 pm
Drone Hardware
https://sj2021.lasalle.org/cras-suscipit-ante-erat-eleifend/
child porn · October 20, 2023 at 4:45 pm
Drone Hardware
https://eastmeetswestyog.com/blog/2021/05/28/yogi-sagar/
porn · October 31, 2023 at 4:56 pm
Drone Hardware
https://mondedubuzz.com/2020/06/02/a-la-memoire-de-george-floyd/
child porn · October 31, 2023 at 7:07 pm
Drone Hardware
https://www.fortworthdubois.com/palumbo-lodge-event-center/lodge-fall11/
porn · November 1, 2023 at 1:58 am
Drone Hardware
https://unikum-nou.ru/elementor-1910/
child porn · November 1, 2023 at 12:41 pm
Drone Hardware
http://www.judyandtheblogettes.com/blogettes_posts/adonai-crowned-himself-king/
efornak · November 4, 2023 at 3:50 pm
efornak
art monk football jersey nba all star 2021 clothesroswell rayguns jerseylamelo in hornets jerseyf1 redbull polo camo gilet mens fluidflow adidas nike air huarache silver burnt metal horseshoe earrings pandorapandora butterfly earrings goldsilver ring w…
spacesmacks · November 8, 2023 at 7:57 pm
spacesmacks
red jogging bottoms womens saucony peregrine 11black air max 90 surplus blancnew balance 998 hvit greyadidas zx flux noir ladies jordan 1 mocha 6.5 y double crazy plunging neck rainbow oakland as grey hat linertexas ranger style cowboy hatwomens fitted…
porn · November 13, 2023 at 8:11 pm
Drone Hardware
http://123hp-printer-setup.us/find-out-how-successful-people-think-so-you-may-be-successful-too/
biosavons · November 16, 2023 at 12:40 am
biosavons
modern church dressesmacys sexy dressessay yes to the dress goth brideflowy sleeve bridesmaid dress air force 1 low red whitenike magista gris azulnike hyperdunk 2016 all blueall pink nike free 60 mens shoes uk shoes
porn · November 19, 2023 at 9:10 pm
Drone Hardware
http://maxitrading.ru/analitika-i-torgovye-rekomendacii-fo/
porn · November 25, 2023 at 2:49 am
Drone Hardware
http://kainaatgroup.af/faq-items/do-you-offer-storage-services/
polofutar · November 25, 2023 at 2:38 pm
polofutar
adidas messi 16.1 white and red cheap saddle shoes pandora rose goldyou are loved bracelet pandorapandora murano glass sea turtle charmpandora sleeping beauty adidas zx 500 og azul amarillo halogen wrap dress deondre francois jersey for cheap
child porn · November 27, 2023 at 11:27 pm
Drone Hardware
https://www.mitsubishimotorsdealermitsubishi.com/fuso/
porn · December 3, 2023 at 1:08 am
Drone Hardware
http://www.hadi.kr/tutorials/
porn · December 3, 2023 at 1:39 am
Drone Hardware
https://www.11sgz.com/forum.php?mod=viewthread
porn · December 3, 2023 at 6:45 am
Drone Hardware
https://biocide-biodegradabile.eu/echipamente/
child porn · December 5, 2023 at 4:03 am
Drone Hardware
https://www.iespasqualcalbo.cat/blocs/europa/2010/05/24/primera-setmana-a-polonia-dels-alumnes-i-professors-de-pqpi/
child porn · December 8, 2023 at 9:40 pm
Drone Hardware
http://mudasukses.com/2023/06/22/the-art-of-negotiation-tips-for-successful-business-deals-2/
bir daha bu kelımeye tanıtm çıkarsan ananı sikerim · December 16, 2023 at 6:47 pm
Drone Hardware
https://porncold.xyz/2022/06/05/indian-erotic-short-film-family-sex-uncensored/
best fake yeezy slide · December 22, 2023 at 10:16 am
best fake yeezy slide
|Stay aware of the current trends in fashion. Change is constant when it comes to style, and magazines are a great way to follow this. They are usually the first source to catch new trends in style.
child porn · January 13, 2024 at 7:43 am
Drone Hardware
https://www.nordpoolen.nu/alanda-apartamento-1-dormitorio-5/
Camiseta Golden State Warriors #11 - Klay Thompson - Hombre - Azul - 13363745 · January 21, 2024 at 6:23 am
Camiseta Golden State Warriors #11 – Klay Thompson – Hombre – Azul – 13363745
|Sheer clothing can be sexy, but it is important that it is not too sheer. Wearing something that is too sheer, particularly in private areas, will make you look trashy more than it will make you look classy.
child porn · January 27, 2024 at 5:23 pm
Drone Hardware
http://www.souperheroes.co.uk/hello-world/
Camiseta Boston Celtics #11 - Payton Pritchard - Hombre - Blanca - 12096184 - camisetasceltics.es · February 10, 2024 at 7:00 pm
Camiseta Boston Celtics #11 – Payton Pritchard – Hombre – Blanca – 12096184 – camisetasceltics.es
}{Don’t follow a trend just because it’s “in.” What looks amazing for a runway model might not look great on you. Follow your tastes, not whatever flavor is popular in the most recent fashion magazine. You are going to want to go with your gut on t…
Camiseta Miami Heat #22 – Jimmy Butler – Mujer – Roja – 13365072 · February 13, 2024 at 7:26 am
Camiseta Miami Heat #22 – Jimmy Butler – Mujer – Roja – 13365072
}{Create a unique fashion style of your own. It is easy to dress like everyone else, but you should create a style all your own. You have to have a certain kind of personality to pull off fashion forward unique style, but if you try it, you can bask in…
UGG Women's Snugg Slide · February 13, 2024 at 7:30 am
UGG Women’s Snugg Slide
|When it comes to hair accessories, there are millions of options available. Hair accessories are things like hair bows, headbands and ponytail holders, but they also include hair extensions. An arsenal of hair accessories makes it easier to look great…
child porn · February 14, 2024 at 8:36 pm
Drone Hardware
http://senri.co.jp/cgi/blog2.cgi?time=1163731515
porn · February 15, 2024 at 1:22 am
Drone Hardware
http://www.capucinederycke.com/waikou-magazine/
child porn · February 20, 2024 at 4:48 am
Drone Hardware
http://www.jaimecastilla.com/sin-categorizar/hello-world/
porn · February 21, 2024 at 12:17 pm
Drone Hardware
http://sofiadrosopoulou.gr/index.php/component/k2/item/1?start=80
child porn · February 22, 2024 at 4:47 pm
Drone Hardware
https://divyaroshani.com/2021/04/14/4667/
https://www.topuggbootsoutlet.com/product/ugg-kids-hushly-slippers/ · February 26, 2024 at 12:32 pm
https://www.topuggbootsoutlet.com/product/ugg-kids-hushly-slippers/
|Wearing white after the end of summer used to be considered a huge fashion faux pas. Any color, as long as it is flattering, is appropriate. So, if it’s white you want to wear, wear it proudly and ignore people who say you shouldn’t. Most people don…
Men's RAY-BAN Aviator Mirror Sunglasses RB3025 019 - topraybansoutlet.com · February 26, 2024 at 12:45 pm
Men’s RAY-BAN Aviator Mirror Sunglasses RB3025 019 – topraybansoutlet.com
|Every woman should at least have a few key items in her closet. It is important to have jeans hemmed for sneakers and some for heels, then a couple pairs of darker, dressier slacks. Let’s not forget the mainstay for every woman, the little black dres…
Air Jordan 4 Retro 'Red Cement' Reps · March 5, 2024 at 3:49 pm
Air Jordan 4 Retro ‘Red Cement’ Reps
|When packing your beauty kit, be careful you don’t over pack with makeup. Choose things that you are drawn to but that also fit the tone of the season. Keep in mind looks for both nighttime and daytime wear. Just as with numerous other products, make…
Air Jordan 1 Retro High OG 'Guava Ice' Reps · March 9, 2024 at 4:36 am
Air Jordan 1 Retro High OG ‘Guava Ice’ Reps
|Be careful when using mascara, and do try getting more product on the brush by pushing it carefully into the container. It will not get more product on the brush, and will trap air inside the bottle. This ups the odds of bacteria growing in it. Move y…
child porn · March 9, 2024 at 8:39 pm
Drone Hardware
https://sjrrtm.opennrm.org/-/map/getData.php?url=https://yari1.xyz/mixed-up-backup-bane-hvmi/
Dunk Low 'Khaki Gum' Reps · March 14, 2024 at 8:11 am
Dunk Low ‘Khaki Gum’ Reps
|Wearing white after the end of summer used to be considered a huge fashion faux pas. Any color, as long as it is flattering, is appropriate. So, if it’s white you want to wear, wear it proudly and ignore people who say you shouldn’t. Most people don…
Off-White x Dunk Low 'Lot 48 of 50' Reps · March 15, 2024 at 2:24 pm
Off-White x Dunk Low ‘Lot 48 of 50’ Reps
|Create a look that is specific to you. Truly original fashion comes from people who make their own style, not those who follow the trends. You, of course, need a certain personality to be comfortable doing this, but once you take the leap, you will su…
casino porn · March 16, 2024 at 6:53 pm
Drone Hardware
https://mf.eukallos.edu.ba/studenti-evropskog-univerziteta-kallos-tuzla-i-evropskog-univerziteta-brcko-distrikt-ucestvovali-su-na-internacionalnom-simpozijumu-u-sarajevu/
Air Jordan 1 Retro High OG 'Vibrations Of Naija' Reps · March 22, 2024 at 10:09 am
Air Jordan 1 Retro High OG ‘Vibrations Of Naija’ Reps
|Sheer clothes are a good option, but only limited to certain types of events. Wearing clothing items that are sheer in private areas can make you appear trashy rather than classy.
Bu web sitesi sitemap tarafından oluşturulmuştur. · March 22, 2024 at 8:33 pm
Drone Hardware
http://gallery.lwestart.com/2121-2/
Air Jordan 4 Retro OG 'Bred' 2019 Reps · March 22, 2024 at 9:06 pm
Air Jordan 4 Retro OG ‘Bred’ 2019 Reps
}Sure you may not like fashion, but other people are paying attention. These tips will help you look your best at all times. Your life will benefit when your wardrobe is improved.
porn · March 23, 2024 at 8:43 pm
Drone Hardware
https://queensgroup.net/steel/st/
child porn · March 28, 2024 at 6:56 am
Drone Hardware
https://reebok.fuelstream.live/?p=593
Air Jordan 4 Retro OG 'White Cement' 2016 Reps · March 29, 2024 at 10:04 am
Air Jordan 4 Retro OG ‘White Cement’ 2016 Reps
|When wearing sheer clothes, make sure the sheer parts are in the right areas. Make sure that you remain classy at all times, and cover your private areas.
meritking · March 29, 2024 at 8:21 pm
Drone Hardware
http://love-words.co.uk/blog/ikea-viral-marketing/
Dunk Low 'Topography University Blue' Reps · March 29, 2024 at 8:56 pm
Dunk Low ‘Topography University Blue’ Reps
|Spend your fashion money on basics. Buy pieces that complement each other and are timeless. Start with the classic look of a black pencil skirt and give it the look of today with a trend top or jacket.
child porn · April 1, 2024 at 12:05 am
Drone Hardware
http://riazfatyana.com.pk/2017/04/06/slider-2/
Air Force 1 Low x AMBUSH 'Phantom' Reps · April 3, 2024 at 5:22 pm
Air Force 1 Low x AMBUSH ‘Phantom’ Reps
You should not struggle with dressing well. Having the right grasp of fashion will make it second nature. This article will provide you with advice to make you a fashion expert soon. Read on for some great tips.
Air VaporMax Plus 'Triple Black' Reps · April 4, 2024 at 3:07 am
Air VaporMax Plus ‘Triple Black’ Reps
|If you are dealing with a problem with frizzy hair, never rub it with a towel after washing it. It will damage and frizz out your hair. Instead, you should wrap it and push the towel to eliminate the moisture. When you are happy, brush and comb your h…
animal porn · April 5, 2024 at 6:24 pm
Drone Hardware
https://anksohk.com/index.php/component/k2/item/3-benefits-of-green-power?start=100
animal porn · April 10, 2024 at 12:08 am
Drone Hardware
https://www.kanafani.gr/sample-page/
animal porn · April 10, 2024 at 1:55 pm
Drone Hardware
https://www.daftar-cft2288.info/deposit-sabung-ayam-cft2288/
Kobe 11 Elite Low 'All Star - Northern Lights' Reps · April 11, 2024 at 4:38 am
Kobe 11 Elite Low ‘All Star – Northern Lights’ Reps
|Before you spend money on extras, make sure you have the essentials covered. Choose items with timeless style and versatility. For example, you might start with a typical black pencil skirt, but change the coordinating shirt or outerwear based on curr…
animal porn · April 11, 2024 at 7:31 am
Drone Hardware
https://wildtroutstreams.com/google-earth-revised/
Yeezy Foam Runner 'Sand' Reps · April 11, 2024 at 3:40 pm
Yeezy Foam Runner ‘Sand’ Reps
|Avoid any horizontal stripes if your weight is higher. This pattern makes you look wider and is completely unflattering. Instead, wear clothing with vertical patterns, which will draw attention to height rather than girth.
Air Jordan 1 Mid SE 'Panda Elephant' Reps · April 12, 2024 at 5:39 pm
Air Jordan 1 Mid SE ‘Panda Elephant’ Reps
|It is not important to be perfect when fashion is involved. Firstly, there is no such thing as perfection in this world. Also, if you try too hard, you may look uptight. Disheveled looks with messy hair, non-matching shoes, or not completely buttoned…
WMNS Air Jordan 1 Mid 'Alternate Bred Toe' Reps · April 13, 2024 at 3:32 am
WMNS Air Jordan 1 Mid ‘Alternate Bred Toe’ Reps
}{Before getting ready to throw out your beauty products, use every last ounce of it. For a products that come in tubes, think about using a squeezer that is made for toothpaste. To get the last drops of bottled products, store them at an angle, or eve…
ananızın amı sıkılmadınız mı · April 16, 2024 at 4:17 am
Drone Hardware
https://adepoldobrasil.org.br/palestra-do-exmo-sr-dr-ives-gandra/
animal porn · April 16, 2024 at 8:09 pm
Drone Hardware
https://isuelihle.org.za/2016-stories-submitted-adjudication-underway/
animal porn · April 21, 2024 at 11:11 pm
Drone Hardware
http://www.dantzalekusakana.com/xiii-aitzkozar-herri-lasterketa/aitzkozarkrossalogoanot/
porn · April 22, 2024 at 11:27 pm
Drone Hardware
https://firstsource-eng.net/product/sp-500/